







Bahasa
Halaman
Hukum


IEEE
Proo
f
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 58, NO. 8, AUGUST 2011 1
Hybrid Model of the Gasoline Enginefor Misfire Detection
1
2
Muddassar Abbas Rizvi, Aamer Iqbal Bhatti, Sr., Member, IEEE, and Qarab Raza Butt3
Abstract—This paper proposes a novel hybrid model for an4internal combustion engine, with the power generated due to5combustion as the input and the crankshaft speed fluctuations as6the output. The individual cylinders of the engine are considered7as subsystems for which a nonlinear model, based on the physical8principles, is derived. The proposed model is linearized at an oper-9ating point, and a switched linear model is formed. The simulation10results of the proposed model are validated by matching the results11with the experimentally observed data. Using the properties of the12validated model, it is shown that the crankshaft speed variations13observed in the engine are a Markov process. A novel algorithm14that is based on the Markov chain is proposed to detect the15misfire in the spark ignition engines. In the ensuing engine rig16experiments, an igniter misfire is introduced in the system and17is successfully detected. The analysis of the data shows that the18engine also has an air leakage in a cylinder (a developing misfire),19which is experimentally confirmed later.20
Index Terms—Discrete event model (DEM), hybrid systems,21Markov chains, mean value model (MVM), misfire detection,22spark ignition (SI) engine.23
I. INTRODUCTION24
THE complexity of automotive vehicles is increasing as25
more and more mechanically driven parts are being re-26
placed by electronically driven actuators. An electronic control27
unit (ECU) is being installed in modern vehicles, which not28
only monitors the sensors installed in the vehicle but also29
controls the electronic actuators. The ECU also provides a di-30
agnostic code to identify different faults present in the vehicle.31
Fault prognosis in automotives is being studied for integration32
in future vehicles. Murphey indicated that the development of33
computationally simpler fault diagnosis algorithms for auto-34
motive systems is considered as the most challenging problem35
[1]. The problem is still being addressed by the research com-36
munity [1]–[4]. A survey of different automotive models and37
fault diagnosis techniques found in literature is provided.38
A general survey indicates that the spark ignition (SI) engine39
is mathematically represented by either the mean value model40
Manuscript received May 3, 2010; revised July 27, 2010; acceptedSeptember 9, 2010. This work was supported in part by the Higher EducationCommission and in part by the ICT Research and Development Fund ofPakistan.
M. A. Rizvi and A. I. Bhatti Sr. are with the Mohammad Ali Jinnah Univer-sity, Islamabad 44000, Pakistan (e-mail: [email protected]; [email protected]).
Q. R. Butt is with the Center for Advanced Studies in Engineering, G-5/1,Islamabad, Pakistan (e-mail: [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TIE.2010.2090834
(MVM) [6], [7] or the discrete event model (DEM) [8]. The 41
MVM is based on the average torque generated in a complete 42
ignition cycle. The model therefore cannot efficiently detect any 43
fault during an individual stroke of an ignition cycle. The DEM 44
is a hybrid model, with states representing the compression, 45
ignition, expansion, and exhaust strokes described as nonlinear 46
differential equations. The engine state is defined by solving 47
all four nonlinear equations. Due to a high computational load, 48
both MVM and DEM are difficult to solve in embedded sys- 49
tems, and they could not attract the fault diagnostic community, 50
especially for misfire fault detection. Luo et al. mentioned that 51
the algorithms executed in the ECU are required to be simpler 52
than most models or signal-based algorithms proposed by the 53
academia [5]. Sood et al. proposed a kinematic model, with 54
the fuel as the input and the crankshaft velocity as the output 55
[9]. The model is based on forces acting on the piston due to 56
the combustion of fuel in the engine cylinder and load acting 57
on the engine. The model was used for the detection of the 58
misfire fault using parameter estimation, and it was concluded 59
that the model-based approach proved to be computationally 60
expensive. Wong et al. proposed an engine model based on the 61
experimental sample data using neural network methods [27]. 62
The model is, however, explicitly applicable only to idle speed 63
control applications. A hybrid modeling approach was used for 64
other automotive applications but not for fault detection [10], 65
[11]. An addition to hybrid modeling is the representation of 66
the discrete states as modes of hybrid system, and each mode 67
system is governed by different continuous dynamics. Mode 68
identification in the presence of fault is carried out by a rule- 69
based analysis of the analytic redundancy relations [29]. The 70
fault diagnosis is based on either model or signal data analysis. 71
Model-based fault diagnosis methods have the advantage that 72
the signal features associated with fault have a physical inter- 73
pretation [9], e.g., the discharge coefficient estimated using the 74
sliding mode observer provides an insight about the physical 75
significance of a parameter [6], [12]. Methods that are based 76
on MVEM were applied for fault diagnosis in coolant systems AQ277
[13], air paths before and after a throttle valve [14], etc. Most 78
of these techniques used state observers, parity equations, or 79
parameter estimation techniques for fault diagnosis [15]. The 80
parameter values forming the basis of fault detection in the 81
model-based method also change with the operating conditions, 82
like load, ambient temperature, pressure, vehicle aging, etc. 83
The value of the discharge coefficient estimated using the 84
sliding mode observer under different load conditions indicates 85
this parameter variation [6]. Sood et al. mentioned that fault 86
diagnosis using some parameters which are not constant leads 87
to the further increase in the complexity of the fault diagnostic 88
0278-0046/$26.00 © 2011 IEEE

IEEE
Proo
f
2 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 58, NO. 8, AUGUST 2011
problem [9]. The heavy computational load and the adaptive89
selection of the threshold values for fault detection added so90
much complexity that not only restricts their application only91
to offline fault detection but also increases the trend of using92
the statistical tools by the fault diagnostics and isolation (using93
control engineering tools) community [16]. The signal-basedAQ3 94
methods identify the features linked with faults in a signal.95
Residual analysis is carried out to identify these features.96
Crossman described some features associated with faults and97
methods to identify them [2].98
Misfire fault occurs when a combustion does not occur in99
one or more engine cylinders. It may occur due to a missing100
spark, an air leakage, or a fault in fuel injection. A number of101
techniques that are based on an artificial neural network were102
used to detect the misfire fault [4], [17]. Feldkamp proposed103
techniques that characterize fault states as hidden states in a104
hidden Markov model and used extended Kalman filter esti-105
mates for NN training [17]. It seems that the author implicitlyAQ4 106
assumed a stochastic analysis and a linearized version of some107
engine nonlinear models. Since the engine is a highly nonlinear108
system whose output depends on a large number of factors, it109
would be difficult to simulate all possible healthy and faulty110
conditions to train the neural network to ensure a robust fault111
detection. Montini proposed a wavelet-based analysis of the112
crankshaft speed fluctuation signal [18], and Rizzoni [19] and113
Sood [22] proposed different data classification methods to114
decide between the binary hypothesis conditions of the fault and115
no fault conditions using a correlation analysis of the data. Both116
wavelet- and correlation-based methods were computationally117
heavy, and the algorithm also needed heuristic guidelines to118
extract the features and to relate to the faults. Although the ap-119
plication of the Markov chains for fault diagnosis can be found120
in the literature [20], however, disturbances that are due to faults121
in dynamic systems have not been proved as a Markov process122
for fault diagnosis and isolation. This paper proves these dis-123
turbances as a Markov process. Morgan et al. indicated that the124
potential advantage of the application of the Markov chains is125
its ability to predict, and they applied it to predict the future con-126
centration of the elements in the lubricant analysis of the marine127
engine [20], where an early prediction is important due to the128
maintenance problems when the ship is at the sea [20]. Luo129
mentioned that the recently introduced new approaches for fault130
diagnosis combined model-based and data-driven techniques131
to obtain a better diagnostic performance [3]. A method that132
transforms the engine speed fluctuations to finite state automata133
is presented in the literature, which stressed on the implemen-134
tation using a field programmable gate array (FPGA) [23].AQ5 135
The objective of this paper is to develop a novel mathematical136
model for SI engines that can explain the crankshaft speed137
fluctuations when a deterministic input with a small randomly138
varying component is applied to the SI engine. The utility of the139
proposed model is expressed by presenting a novel method for140
misfire detection. The proposed method is based on the speed141
fluctuation of the crankshaft. The method is simple and cost142
effective, and it needs no additional installation as the sensor is143
preinstalled in all modern vehicles [21].144
This paper is organized as follows. Section II presents a145
hybrid mathematical model that is used to represent the steady-146
state behavior of the internal combustion (IC) engine [24], [25]. 147
A nonlinear model representing the motion of the piston in 148
the engine cylinders is derived using the physical principles 149
to represent the subsystems of the hybrid model. The non- 150
linear model is linearized at an operating point, and the engine 151
is taken as a switched linear hybrid system. The properties 152
of the proposed hybrid system are investigated. Section III 153
presents the statistical analysis of the system output against a 154
random variation of the inlet air, and finally, the fluctuation 155
in the crankshaft speed is proved to be a Markov process. 156
Section IV presents the algorithm for fault diagnosis, and a 157
comparison of the presented method with an existing method 158
is provided in Section V. The simulation and experimental 159
results are presented, analyzed, and discussed in Section VI. 160
The relative/receiver operating characteristic (ROC) analysis is 161
presented in Section VII. The concluding remarks are given in 162
Section VIII, and the references are given at the end. 163
II. SYSTEM MODELING 164
For system modeling, a four-cylinder four-stroke engine is 165
assumed, where the ignition occurs in only one cylinder at a 166
time. The pistons of the four cylinders are coupled to a common 167
shaft via a crankshaft. The power strokes of all cylinders are 168
separated from each other by 180◦, and they periodically occur 169
after two shaft revolutions, named as an ignition cycle. During 170
a power stroke, the air–fuel mixture is burnt inside the cylinder, 171
and pressure develops in the chamber of the cylinder, applying 172
force on the piston. The modeling is carried out in the following 173
two steps. 174
1) In the first step, a deterministic switched linear model, 175
with the power generated by the fuel combustion as the 176
input and the crankshaft angular velocity as the output, is 177
presented in Section II-A–II-E. 178
2) In the second step, the statistical properties of the air in- 179
take in the cylinder are studied to establish that the crank- 180
shaft speed fluctuations are Gaussian and Markov. The 181
properties of air are explored because the engine power is 182
manipulated by controlling the amount of air intake. 183
A. Hybrid Model 184
The SI engine is modeled as a hybrid system with four iden- 185
tical minimum phase LTI subsystems, where each subsystem AQ6186
represents an engine cylinder. A subsystem/cylinder is active 187
when it contributes power to the system, i.e., during a power 188
stroke. The subsystems are sequentially actuated during an 189
ignition cycle. The output of the system would be a vector 190
sum of the outputs of the subsystems. The following are the 191
modeling assumptions. 192
Assumption 1: The system operates at a steady-state condi- 193
tion on a constant load. 194
Assumption 2: The air–fuel ratio is stoichiometric. 195
Assumption 3: The whole energy is instantaneously added at 196
the beginning of the power stroke and is delivered to a storage 197
element (flywheel) at a constant rate. 198
Assumption 4: At any time instant, only one cylinder would 199
receive an input to become active, and it exerts force on the 200

IEEE
Proo
f
RIZVI et al.: HYBRID MODEL OF THE GASOLINE ENGINE FOR MISFIRE DETECTION 3
piston and other cylinders that are being passive due to suction.201
The compression and exhaust processes contribute to the engine202
load torque.AQ7 203
If the period of the ignition cycle is T , u(t) is the system204
input at time t during an ignition cycle, and ui(t) is the input of205
the ith subsystems. Based on Assumption 4206
ui(t) = u(t) when(i − 1)T
4< t <
iT
4, i = 1, 2, 3, 4 (1)
ui(t) = 0 otherwise. (2)
The framework of the hybrid model for a maximally balanced207
SI engine with four cylinders is represented as a five-tuple208
model 〈μ,X,Γ,Σ, φ〉. The basic definition of the model para-209
meters is given in the following.210
1) μ = {μ1, μ2, μ3, μ4}, where each element of the set211
represents the active subsystem of the hybrid model.212
2) X ∈ R2 represents the state variable of the continu-213
ous subsystems. It would be proved in the next section214
that vector X would have velocity and acceleration as215
components.216
3) Γ = {G(s)}, where G(s) is the transfer function of the217
linear subsystems. For the maximally balanced cylinder,218
the set contains a single element. The transfer function219
G(s) is derived in Sections II-B–II-D of this section. The220
model can be defined in state space as221
x(t) =AX + BU (3)y(t) =CX + DU (4)
where222
U ∈ R A ∈ R2×2 B ∈ R2×1 C ∈ R1×2 D ∈ R.
4) Σ : μ → μ represents the generator function that defines223
the activation of the next subsystem after the activity224
of the current subsystem end. The generator function is225
defined in terms of the crankshaft position as226
Σ =
⎧⎪⎪⎨⎪⎪⎩
μ1 4nπ ≤∫
θ1dt < (4n + 1)πμ2 (4n + 1)π ≤
∫θ1dt < (4n + 2)π
μ3 (4n + 2)π ≤∫
θ1dt < (4n + 3)πμ4 (4n + 3)π ≤
∫θ1dt < (4n + 4)π
(5)
where n = 0, 1, 2 and∫
θ1dt represents the instantaneous227
shaft position that identifies the output of the generator228
function.229
5) φ : Γ × μ × X × u → X defines the initial condition for230
the next subsystem after a switching event, where u231
represents the input of the active subsystem. Fig. 1 shows232
the subsystems and switching sequence of the proposed233
engine hybrid model.234
B. Nonlinear Subsystem Modeling235
Consider δQ as the amount of energy added in the system236
by burning the air–fuel mixture. Based on Assumption 3, the237
energy is instantaneously added in the cylinder. This will appear238
as an increase in the internal energy of the system239
δU = δQ. (6)
Fig. 1. Hybrid system with four subsystems.
A part of this internal energy is used to do work, and the rest of 240
the energy is drained in the coolant and exhaust system. If the 241
internal energy changes to work with the constant efficiency ηt, 242
then work δW is given by the energy balance equation as 243
δW = −ηtδU. (7)
Using (6) 244
δW = −ηtδQ. (8)
If p is the pressure due to the burnt gases, then the work done 245
during the expansion stroke is given by 246
W =
V 2∫V 1
pdV (9)
where V1 and V2 are the initial and final volumes of the cylinder 247
during expansion. For adiabatic expansion 248
pV γ = k1 (10)
where k1 and γ are constant. Hence, (9) becomes 249
W =
V 2∫V 1
k1V−γdV (11)
W = k1V −γ+1
2 − V −γ+11
−γ + 1. (12)
Consider the closed end of the piston as the origin. Also, 250
assume that A is the surface area of the piston and x is a 251
continuous variable that represents the instantaneous piston 252
position. When the piston moves a small distance δx from 253
its initial position x, where δx is constant and where it can 254
be arbitrarily chosen to be small, then the work done can be 255
expressed as 256
δW = k1[A(x + δx)]−γ+1 − [Ax]−γ+1
−γ + 1(13)
δW = k1A−γ+1
−γ + 1[(x + δx)−γ+1 − x−γ+1
](14)
δW =k1A
−γ+1
−γ + 1
[x−γ+1
(1 +
δx
x
)−γ+1
− x−γ+1
](15)
δW =k1A
−γ+1x−γ+1
−γ + 1
[(1 +
δx
x
)−γ+1
− 1
]. (16)

IEEE
Proo
f
4 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 58, NO. 8, AUGUST 2011
Expanding (16) using a binomial series, neglecting the higher257
powers of δx, and simplifying258
δW = k1A−γ+1x−γδx. (17)
Using (8), (17) becomes259
δQ =k1A
−γ+1x−γδx
ηt. (18)
If F is the force applied by the burnt gases, m is the mass of the260
engine moving assembly (piston, connecting rod, crankshaft,261
and flywheel), k2 is the coefficient of friction, and k3 is the262
coefficient of elasticity, then the net force acting on the piston263
is given by264
md2x
dt2= F − k2
dx
dt− k3x (19)
md2x
dt2+ k2
dx
dt+ k3x = F. (20)
The net work done by the expanding gases against the load,265
friction, and elastic restoring forces when the piston moves by266
a small distance δx would be given as267 [m
d2x
dt2+ k2
dx
dt+ k3x
]δx = δW. (21)
Using (17), the aforementioned equation becomes268 [m
d2x
dt2+ k2
dx
dt+ k3x
]δx = k1A
−γ+1x−γδx. (22)
The displacement δx can be chosen to be constant and ar-269
bitrarily small. As the piston moves, the volume inside the270
combustion chamber increases, resulting in the reduction of the271
instantaneous pressure on the piston. The instantaneous power272
is therefore a function of the piston position. The instantaneous273
power delivered by the engine would be calculated by differen-274
tiation as275 [m
d3x
dt3+ k2
d2x
dt2+ k3
dx
dt
]δx = − k1γA−γ+1x−γ−1 dx
dtδx
(23)
md3x
dt3+ k2
d2x
dt2+ k3
dx
dt= − k1γA−γ+1x−γ−1 dx
dt.
(24)
Write (24) in terms of velocity v as276
md2v
dt2+ k2
dv
dt+ k3v = − γηt
k1A−γ+1x−γδx
ηt
v
xδx(25)
md2v
dt2+ k2
dv
dt+ k3v = γηtδQ
v
xδx(26)
md2v
dt2+ k2
dv
dt+ k3v =
γηtv
x
δQ
δt
δt
δx. (27)
Equation (27) represents a nonlinear model of the crankshaft277
speed when the power is provided to the engine by fuel ignition.278
C. Model Linearization 279
For model linearization, consider that the piston always 280
moves between two extreme positions xt and xb, where xt 281
represents the piston position at the top dead center (TDC) 282
and xb represents the piston position at the bottom dead center 283
(BDC). Therefore, x can never be zero, and the right-hand side 284
(RHS) of (27) is a smooth function. The model is therefore 285
linearized at the TDC. 286
If a constant finite power P is added to a cylinder when its 287
piston is at the TDC and the system delivers power P (x), then 288
the power delivered by system would be given as 289
md2v
dt2+ k2
dv
dt+ k3v =
γηvt
xP (x)
1v
(28)
md2v
dt2+ k2
dv
dt+ k3v =
γηt
xP (x). (29)
Linearizing the system at the TDC (x = xt) under the 290
steady-state condition, (29) is written as 291
md2v
dt2+ k2
dv
dt+ k3v =
γηt
xtP (x). (30)
Based on Assumption 3, the system is delivering power at 292
a constant rate; hence, P (x) is taken as constant. The RHS of 293
(30) is therefore constant, and the expression becomes a linear 294
differential equation. 295
D. Model Parameter Estimation 296
The engine operating power can be estimated by using the 297
manifold air pressure/manifold air flow sensors and by esti- 298
mating the mass of the fuel sprayed and the heat equivalent of 299
the fuel. The typical value of the efficiency of the SI engine 300
is nearly 35%. All of the parameters on the RHS of (30) are 301
known, except the elasticity k3 and friction coefficients k2. 302
The movement of the piston exhibits a periodic behavior, 303
with the same fundamental frequency as that of the rotational 304
speed of the engine shaft. This provides a heuristic guideline in 305
choosing the value of k3 as a function of the crankshaft angular 306
speed. The empirical choice is validated using the simulation 307
and experimental results reported later 308
k3 = ω2 = (2πN)2 (31)
where N is the engine speed in revolution per second. 309
During experimental verification, the load is also applied by 310
friction. Most frictional models described in literature are based 311
on the empirical relations as a polynomial in the engine speed. 312
A simplified frictional model is chosen, with a term containing 313
only the square of the engine speed 314
k2 = b ω2. (32)
On the basis of the simulation and experimental results, it is 315
established that the optimal selection of the value of b varies 316
between 0.2 and 0.5. The values of parameters k1 and k2 depend 317
on the operating point. The stability of the linearized subsystem 318
is ensured by the Routh–Hurwitz criteria. 319

IEEE
Proo
f
RIZVI et al.: HYBRID MODEL OF THE GASOLINE ENGINE FOR MISFIRE DETECTION 5
E. Model Properties320
The properties of the hybrid model when the engine is oper-321
ating under the steady-state conditions are presented as a set of322
propositions, lemmas, and theorems given in the following.323
Proposition 1: When the engine is running with a constant324
speed, the input to the engine system is a periodic impulse train325
with a period of T/4, where T is the period of the ignition326
cycle. This is because the energy is added in the engine as an327
impulse (Assumption 3), and the event of the addition of the328
energy occurs four times during an ignition cycle energy, i.e.,329
once in each cylinder.330
Lemma 1: Under the no misfire condition, the system output331
exhibits a periodic ac component with a period of T/4, where332
T represents the period of the ignition cycle (two revolutions).333
Proof: When all subsystems are identical and when they334
are represented by a linear model, then a periodic input with a335
period of T/4 would produce a periodic output with the same336
frequency.337
Lemma 2: When a cylinder misfires, the output of the system338
exhibits a periodic ac component with a period of T .339
Proof: The misfire can be considered as the loss of one340
of every fourth impulse of the input signal. The input signal is341
therefore periodic, with a period of T rather than T/4, and the342
output also exhibits a fundamental frequency of T .343
Lemma 3: Under the no misfire fault condition, the output344
contains four identical peaks in an ignition cycle.345
Proof: The input signal during an ignition cycle contains346
four impulses. As the subsystems are stable LTI minimum347
phase second-order systems, they exhibit one peak in the output348
against each impulse occurring in the impulse train input.349
Lemma 4: In the steady-state conditions with fault in the ith350
event, no peak would be observed due to the input of the ith351
subsystem.352
Proof: The absence of an impulse at the ith place in353
the input signal would result in the loss of the corresponding354
peak.355
The results of Lemmas 1, 2, 3, and 4 can be observed from356
the simulation and experiment results discussed later.357
Definition 1: The system is said to be in the steady state358
when the net change in the system output v(t) in one complete359
ignition cycle is zero360
v(t + T ) = v(t). (33)
Theorem 1: Under the steady-state and no fault conditions361
when the same input is given to the identical subsystems (max-362
imally balanced cylinders), the response of each subsystems363
would be independent.364
Proof: If u is the input to a subsystem, v(0) is the initial365
condition, and h(t) is the impulse response of a subsystem, then366
the output of the second subsystem (i.e., at time t, where T/4 <367
t < 2T/4) is given by368
v(t) = v(0) +
T4∫
0
h(t − τ)u(τ)dτ +
t∫T4
h(t − τ)u(τ)dτ.
(34)
Based on Lemma 1, the output signal is periodic, with a period 369
of T/4; therefore 370
v(T/4) = v(0) (35)
v(0) +
T4∫
0
h(t − τ)u(τ)dτ = v(0) (36)
and (34) becomes 371
v(t) = v(T/4) +
t∫T4
h(t − τ)u(τ)dτ. (37)
Hence, during the activation time of the second subsystem, 372
the output depends only on the input u(t) and the impulse 373
response of the second subsystem, and it is independent from 374
the response of the first subsystem. Similarly, it can be proved 375
that, under the steady-state conditions, the responses of all 376
cylinders are independent. 377
Proposition 2: For an EFI engine, the air intake in the AQ8378
cylinders is measured, and a fuel that is proportional to the 379
amount of air intake is sprayed into it. Therefore, the power 380
input to the system in the steady-state conditions is proportional 381
to the amount of air sucked. 382
The following corollaries that are based on the properties 383
of the proposed hybrid model would be used for onward sta- 384
tistical analysis and for the development of the fault detection 385
methodology. 386
Corollary 1: Four peaks would be observed in one ignition 387
cycle of a four-cylinder SI engine (Lemma 3). 388
Corollary 2: The amplitudes of the four observed peaks 389
represent four independent events (Theorem I). 390
Corollary 3: The crankshaft speed is proportional to the 391
input power (due to a linear model of the subsystems). 392
Corollary 4: The crankshaft speed is proportional to the 393
amount of air intake (based on Corollary 3 and Proposition 2). 394
III. STATISTICAL ANALYSIS 395
The air intake is considered as a random variable, and the 396
statistical analysis is carried out in the following steps. 397
1) Determine the probability density function (pdf) of the 398
random variable representing the peak values of the 399
velocity observed in an ignition cycle. 400
2) Form a collection of the aforementioned random variable. 401
3) Prove that the aforementioned collection is Gaussian and 402
Markov. 403
A. Step 1 404
Using Corollary 4, it can be established that the pdf of the 405
air intake in the engine cylinders and the crankshaft speed are 406
similar. The problem of finding the pdf of the peak value of the 407
velocity is therefore reduced to finding the pdf of the peaks of 408
the air intake. The pdf of the air intake is estimated by a series of 409
three hypothetical experiments representing the suction of air in 410
the engine cylinders. The hypothetical experiment is a statistical 411

IEEE
Proo
f
6 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 58, NO. 8, AUGUST 2011
experiment which is not actually conducted, but the statistical412
properties of the events generated by it could be analyzed.413
1) Hypothetical Experiment 1: Consider a hypothetical ex-414
periment of counting the number of molecules sucked in the415
cylinder as the piston moves by a differential amount δx → 0.416
The sample space for this hypothetical experiment would be417
{Nmin, Nmin + 1, . . . , Nmax}, where Nmin represents the min-418
imum number of air molecules that are sucked during any419
differential movement δx (where δx → 0) and Nmax is defined420
vice versa. Each differential movement δx of the piston during421
the suction stroke produces an event of this experiment. A422
random variable ψi is defined on the sample space that assigns423
some probability P (·) to each element of this sample space.424
The pdf for this variable can be assumed to be uniform and425
independent and identically distributed as the amount of air426
sucked in the cylinder depends upon the pressure difference427
between the cylinders and the manifold, and the suction stroke428
of the SI engine always occur at a constant pressure.429
2) Hypothetical Experiment 2: The second hypothetical ex-430
periment is defined as counting the total number of molecules431
sucked by the cylinder as the piston moves from the TDC to432
the BDC. Each suction cycle would generate an event of this433
experiment. A random variable for the events of this experiment434
can be expressed as a sum of the large number of samples of435
hypothetical experiment 1436
ξk =∑
i
ψi. (38)
Using the central value theorem, it can be concluded that the437
pdf of this variable is a Gaussian distribution.438
3) Hypothetical Experiment 3: This hypothetical experi-439
ment is defined as counting the maximum number of molecules440
sucked by any of the four cylinders during an ignition cycle.441
A random variable of this experiment also represents the sum442
of the large number of samples of experiment 1, and hence,443
it is a Gaussian variable. If Xm,i is a random variable that444
represents the maximum air that is sucked in the ith cylinder445
and in the mth ignition cycle, where i ∈ {1, 2, 3, 4} and m ∈446
{1, 2, 3, . . .}, then Xm,i is a Gaussian variable.AQ9 447
B. Step 2448
Defining a collection Z of Xm,i and ignoring the index i for449
simplicity450
Z = {X1,X2, . . . , Xn} (39)
where n represents the number of samples, which can be very451
large. The collection Z is our variable of interest, which is452
claimed as Gaussian and Markov processes.453
C. Step 3454
In the following two sections, it is proved that collection Z is455
Gaussian and Markov.456
1) Proof (Collection Z Is Gaussian): Corollary 2 in457
Section II ensures the independence of the events of collection458
Z. The method of the proof is adopted from Speyer [26] and is459
applied to the problem at hand. The characteristic function of 460
the collection is 461
ΦZ(ω1, ω2, . . . , ωn) = E[ejωT Z ] (40)
where ω is the frequency variable. The exponent can be 462
expanded as 463
ωT Z =ω1X1 + ω2X2 + · · · + ωnXn (41)ωT Z =ωn(Xn − Xn−1) + (ωn + ωn−1)(Xn−1 − Xn−2)
+ · · · + (ωn + · · · + ω1)X1. (42)
Here, Xi − Xi−1 = ΔXi represents the difference between the 464
peak values of the air sucked during two successive ignition 465
cycles. Equation (34) therefore becomes 466
ΦZ(ω1, ω2, . . . , ωn) = E[ejωnΔXnej(ωn+ωn−1)ΔXn−1 · · ·
×ej(ωn+ωn−1+···+ω1)X1
](43)
ΦZ(ω1, ω2, . . . , ωn) = ΦΔXn(ωn)ΦΔXn−1(ωn + ωn−1) · · ·
× ΦX1(ωn + ωn−1 + · · · + ω1). (44)
The collection would be a Gaussian process if its characteristic 467
function is Gaussian. As X1 is Gaussian, the collection would 468
be a Gaussian if ΔXi is also Gaussian 469
ΔXn =Xn − Xn−1 (45)
Xn =Xn−1 + ΔXn. (46)
Xn and Xn−1 represent the maximum air sucked during differ- 470
ent strokes of two different ignition cycles of the engine. Using 471
Corollary 2, these strokes are independent, so Xn and ΔXn−1 472
are independent. The characteristic function of Xn becomes 473
ΦXn= ΦXn−1ΦΔXn
(47)
ΦΔXn=
ΦXn
ΦXn−1
. (48)
However, as both Xn and Xn−1 are Gaussian 474
ΦXn= e−
ω2σ2n
2 ΦXn−1 = e−ω2σ2
n−12 .
Hence 475
ΦΔXn= e−
ω2(σ2n−σ2
n−1)2 (49)
which is the characteristic function of a Gaussian random 476
variable with zero mean and variance σ2n − σ2
n−1. This indicates 477
that the difference between the maximum air sucked observed 478
during two consecutive ignition cycles is Gaussian. Consider 479
a collection of nonoverlapping increment Y . The collection 480
represents the difference between the maximum air sucked in 481
any of the four cylinders during two successive ignition cycles 482
for n ignition cycles 483
Y = {X1,X2 − X1, . . . , Xn − Xn−1}(50)
Y = {X1,ΔX2, . . . ,ΔXn}. (51)

IEEE
Proo
f
RIZVI et al.: HYBRID MODEL OF THE GASOLINE ENGINE FOR MISFIRE DETECTION 7
Based on Assumption 2, the suction in different cylinders is484
independent, which ensures that events of set Y also form485
a set of independent events. The distribution function of the486
nonoverlapping increment of the collection can be written as487
fX1,...,ΔXn(x1, x2 − x1, . . . , xn − xn−1)
=n∏
i=1
1σ√
2πe
−(xi−xi−1)2
2σ2 (52)
fX1,...,ΔXn(x1, x2 − x1, . . . , xn − xn−1)
=n∏
i=1
fΔXi(xi − xi−1) (53)
where x0 is assumed to be zero. This indicates that X is488
Gaussian. Using (44), it is established that collection z is489
Gaussian, and it has an independent increment.AQ10 490
2) Proof (Collection Z Is Markov): By definition491
FXn|X1,...,Xn−1(xn|x1, . . . , xn−1)
= P (Xn ≤ xn|X1 = x1, . . . , Xn−1 = xn−1). (54)
Given the past sequence, the RHS of the equation can be492
transformed in terms of increments493
FXn|X1,...,Xn−1(xn|x1, . . . , xn−1)
= P (Xn−Xn−1≤xn−xn−1|Xk−Xk−1 =xk−xk−1) (55)
where k = 1, 2, . . . , n − 1494
The independent increment property of the collection enables495
us to change the conditional probability with unconditional496
probability. Therefore497
FXn|X1,...,Xn−1(xn|x1, . . . , xn−1) = FΔXn(xn − xn−1).
(56)
It has been proved earlier that ΔXi is also Gaussian498
FΔXn(xn − xn−1) =
xn∫−∞
1σ√
2πe
−(η−xn)2
2σ2 dη (57)
FΔXn(xn − xn−1) =
xn∫−∞
1σ√
2πe
−η2−x2n+2ηxn
2σ2 dη (58)
FΔXn(xn − xn−1) =
∫ xn
−∞1
σ√
2πe
−η2−2x2n+2ηxn
2σ2 dη
e−x2n√
σ2π
(59)
FΔXn(xn − xn−1) =
∫ xn
−∞ fXnXn−1(η, xn−1)dη
fXn−1(xn−1)(60)
FΔXn(xn − xn−1) =FXn|Xn−1(xn|xn−1). (61)
Therefore, (56) becomes499
FXn|X1,...,Xn−1(xn|x1, . . . , xn−1) = FXn|Xn−1(xn|xn−1).(62)
The collection Z therefore represents a Markov process. The500
events of this collection are the maximum amount of air sucked501
in any cylinder during an ignition cycle. Based on Corollary 502
4, it is deduced that the collection of the events generated by 503
the peaks observed in the crankshaft speed is also Gaussian and 504
Markov. The basic philosophy of the proposed fault diagnostic 505
method is based on the peak velocities associated with four 506
identical subsystems. In a healthy engine, the largest peak 507
observed in an ignition cycle can belong to any of the four 508
cylinders with equal probability. Under faulty conditions, the 509
smallest peak would correspond to the faulty cylinder with 510
highest frequency due to power loss. The difference between 511
two consecutive peaks is therefore taken as a measure of the 512
power loss due to the faulty cylinder. 513
IV. FAULT DETECTION METHODOLOGY 514
There are two basic steps in most fault detection techniques, 515
i.e., residual generation and residual evaluation. In the proposed 516
algorithm, the difference between the peak values of the veloc- 517
ity in two consecutive cylinders is used for residual generation. 518
The step of residual evaluation is carried out using Markov 519
chains. 520
The instantaneous crankshaft speed is measured by acquiring 521
the data from the crankshaft speed sensor at a sufficiently high 522
data rate. The igniter signal is used to associate the data with 523
a specific cylinder. The peak value of the velocity during the 524
ignition stroke of each cylinder is identified in each ignition 525
cycle. If v1, v2, v3, and v4 are the peak values of the velocity in 526
the ith ignition cycle, a residual vector di is defined as 527
di = [v1 − v2 v2 − v3 v3 − v4 v4 − v1]. (63)
v1 in the fourth terms of the residual vector represents the shaft 528
velocity in the i + 1th ignition cycle, which is the next power 529
stroke after the fourth ignition stroke of the ith ignition cycle. 530
For a residual analysis using the Markov chains, a set of four 531
states si, i = 1, 2, 3, 4, is defined as 532
s1 : max(di) = 1, i = 1, 2, 3, 4 (64a)
s2 : max(di) = 2, i = 1, 2, 3, 4 (64b)
s3 : max(di) = 3, i = 1, 2, 3, 4 (64c)
s4 : max(di) = 4, i = 1, 2, 3, 4. (64d)
A single-state transition event from state si to sj in the mth 533
ignition cycles is defined as a matrix Fm, with one in the jth 534
row and in the ith column and zero elsewhere, i.e., 535
Fm =
⎡⎢⎣
0 0 0 00 0 1 00 0 0 00 0 0 0
⎤⎥⎦ . (65)
Equation (65) represents that the maximum power loss is ob- 536
served in the third cylinder in the mth ignition cycle and in the 537
second cylinder in the (m + 1)th ignition cycle. A matrix F 538
is defined by adding the state transition events of the multiple 539
ignition cycles as 540
F =∑m
Fm, m = 1, 2, 3, . . . . (66)
IEEE
Proo
f
8 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 58, NO. 8, AUGUST 2011
Matrix F contains the frequency of occurrence of all state541
transitions as542
F =
⎡⎢⎣
f11 f12 f13 f14
f21 f22 f23 f24
f31 f32 f33 f34
f41 f42 f43 f44
⎤⎥⎦ (67)
where fij represents the frequency of arrival of the ith state543
from the jth state. The total number of arrival to the ith state544
from any other state is the sum of the ith row, i.e.,545
fi =4∑
j=1
fij , i = 1, 2, 3, 4. (68)
Matrix F is then converted to a state transition matrix P that is546
defined as547
P =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
f11 f12 f13 f14
f1 f1 f1 f1
f21 f22 f23 f24
f2 f2 f2 f2
f31 f32 f33 f34
f3 f3 f3 f3
f41 f42 f43 f44
f4 f4 f4 f4
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
. (69)
The elements pij of matrix P represent the probability548
of the state transition to the ith state from the jth state549
(i, j {1, 2, 3, 4}). The matrix P satisfies the properties of the550
state transition matrix of a Markov chain, i.e.,551
pij ≥ 0, i = 1, 2, 3, 4 (70)∞∑
j=0
pij = 1, i = 1, 2, 3, 4. (71)
Using state transition matrix P and a vector p(0) that defines552
the initial fault probability of four cylinders, the fault probabil-553
ity after n transitions is predicted as554
p(n) = p(0)P (n). (72)
Assuming that all cylinders are equally probable for having a555
fault, the initial fault probability vector is defined as p(0) =556
[0.25 0.25 0.25 0.25]. Using eigenvalue decomposition (EVD)AQ11 557
of matrix P , the aforementioned expression can be written as558
p(n) = p(0)V D(n)V −1 (73)
where V is a matrix of eigenvectors and D is a diagonal matrix,559
with the eigenvalues of the state transition matrix on diagonal.560
The limiting state probability would be calculated under the561
limit n → ∞. Since matrix D is diagonal, the calculation of562
the arbitrary power of the matrix is simply a computation of563
the scalar power. When the algorithm converges in the faulty564
state, the probability of the occurrence of the faulty state is565
the highest, and also, the faulty state would jump to itself with566
highest frequency so that the diagonal element as well as the567
column and row sums corresponding to the faulty state in matrix568
F would be the largest. This heuristic result is also supported569
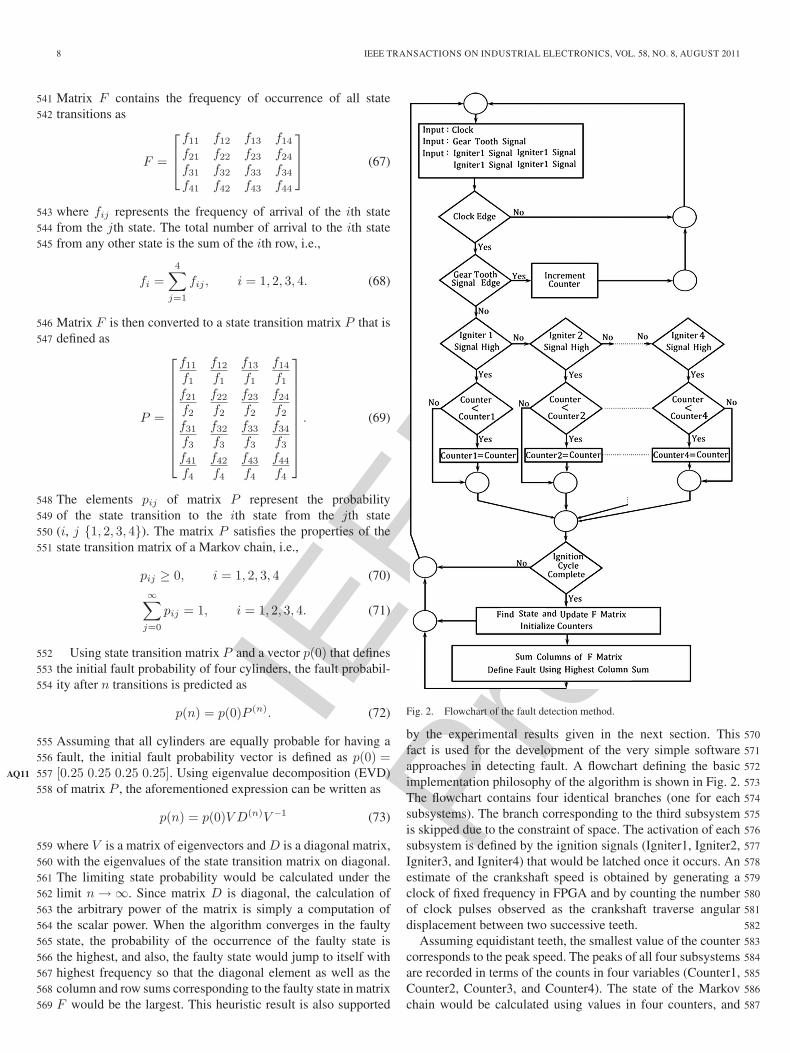
Fig. 2. Flowchart of the fault detection method.
by the experimental results given in the next section. This 570
fact is used for the development of the very simple software 571
approaches in detecting fault. A flowchart defining the basic 572
implementation philosophy of the algorithm is shown in Fig. 2. 573
The flowchart contains four identical branches (one for each 574
subsystems). The branch corresponding to the third subsystem 575
is skipped due to the constraint of space. The activation of each 576
subsystem is defined by the ignition signals (Igniter1, Igniter2, 577
Igniter3, and Igniter4) that would be latched once it occurs. An 578
estimate of the crankshaft speed is obtained by generating a 579
clock of fixed frequency in FPGA and by counting the number 580
of clock pulses observed as the crankshaft traverse angular 581
displacement between two successive teeth. 582
Assuming equidistant teeth, the smallest value of the counter 583
corresponds to the peak speed. The peaks of all four subsystems 584
are recorded in terms of the counts in four variables (Counter1, 585
Counter2, Counter3, and Counter4). The state of the Markov 586
chain would be calculated using values in four counters, and 587
IEEE
Proo
f
RIZVI et al.: HYBRID MODEL OF THE GASOLINE ENGINE FOR MISFIRE DETECTION 9
matrix F is modified. The fault would be identified by testing588
the sum of the columns of matrix F .589
V. COMPARISON OF THE METHODS590
The memory requirements and the number of computations591
during one complete ignition cycle can be taken as the criteria592
in comparing the algorithms. The comparison of the algorithm593
is made with the algorithm based on the cross-correlation of594
the observed signal xi and the signal with known faults xj595
[22]. Consider a vector with N samples in a complete ignition596
cycle. The cross-correlation coefficient of the data vector with597
a known fault vector is given by598
Sij =∑N
n=1 [(xi(n) − xi) (xj(n) − xj)]σiσj
.
A. Memory Comparison599
The method that is based on the cross-correlation needs N600
memory locations for the data and N memory location for601
each sample of the known fault. If N = 24, then 48 memory602
locations would be needed to detect any particular single fault603
under test. The proposed method needs only 25 memory lo-604
cations: a system counter, four counters of subsystems, four605
igniter signals, and 16 elements of the state transition matrix.606
The method can detect all possible single-fault cases.607
B. Number of Computations608
The method that is based on correlation will first calculate609
the velocity vector. The average and standard deviations of610
the velocity vectors are computed. The correlation coefficient611
would then be found by N multiplications, N additions, and a612
division for each fault. The proposed method needs only N + 8613
comparisons and 12 additions to identify all faults.614
If the signal of the multiple ignition cycle is tested, the615
memory requirement and the number of computations of the616
algorithm based on the correlation analysis would increase, but617
the memory requirements of the proposed method remain same.618
The methods that are based on model-based fault detection and619
wavelet-based techniques need floating point calculations, and620
they are computationally more expensive.621
The implementation philosophy and the flowchart of the622
proposed algorithm indicate the simplicity of the proposed fault623
diagnosis algorithm without floating point calculations, and its624
implementation on FPGA needs a short development time.625
VI. SIMULATION AND EXPERIMENTAL RESULTS626
A. Model Simulation627
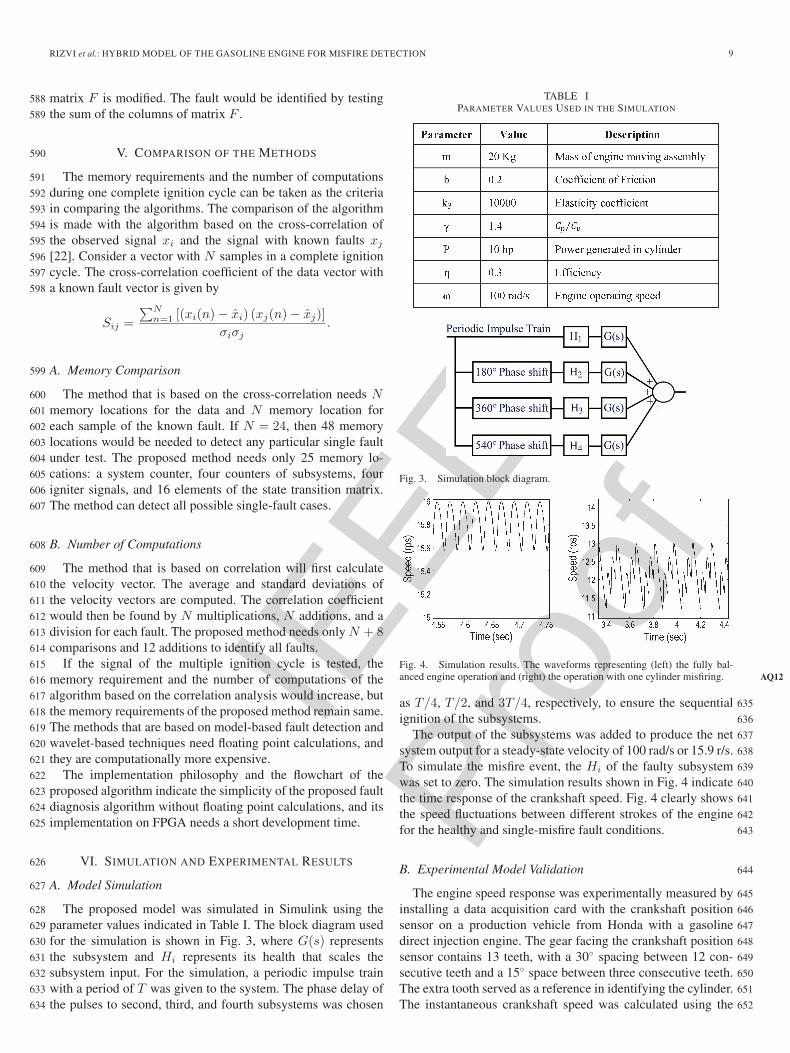
The proposed model was simulated in Simulink using the628
parameter values indicated in Table I. The block diagram used629
for the simulation is shown in Fig. 3, where G(s) represents630
the subsystem and Hi represents its health that scales the631
subsystem input. For the simulation, a periodic impulse train632
with a period of T was given to the system. The phase delay of633
the pulses to second, third, and fourth subsystems was chosen634
TABLE IPARAMETER VALUES USED IN THE SIMULATION
Fig. 3. Simulation block diagram.
Fig. 4. Simulation results. The waveforms representing (left) the fully bal-anced engine operation and (right) the operation with one cylinder misfiring. AQ12
as T/4, T/2, and 3T/4, respectively, to ensure the sequential 635
ignition of the subsystems. 636
The output of the subsystems was added to produce the net 637
system output for a steady-state velocity of 100 rad/s or 15.9 r/s. 638
To simulate the misfire event, the Hi of the faulty subsystem 639
was set to zero. The simulation results shown in Fig. 4 indicate 640
the time response of the crankshaft speed. Fig. 4 clearly shows 641
the speed fluctuations between different strokes of the engine 642
for the healthy and single-misfire fault conditions. 643
B. Experimental Model Validation 644
The engine speed response was experimentally measured by 645
installing a data acquisition card with the crankshaft position 646
sensor on a production vehicle from Honda with a gasoline 647
direct injection engine. The gear facing the crankshaft position 648
sensor contains 13 teeth, with a 30◦ spacing between 12 con- 649
secutive teeth and a 15◦ space between three consecutive teeth. 650
The extra tooth served as a reference in identifying the cylinder. 651
The instantaneous crankshaft speed was calculated using the 652
IEEE
Proo
f
10 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 58, NO. 8, AUGUST 2011
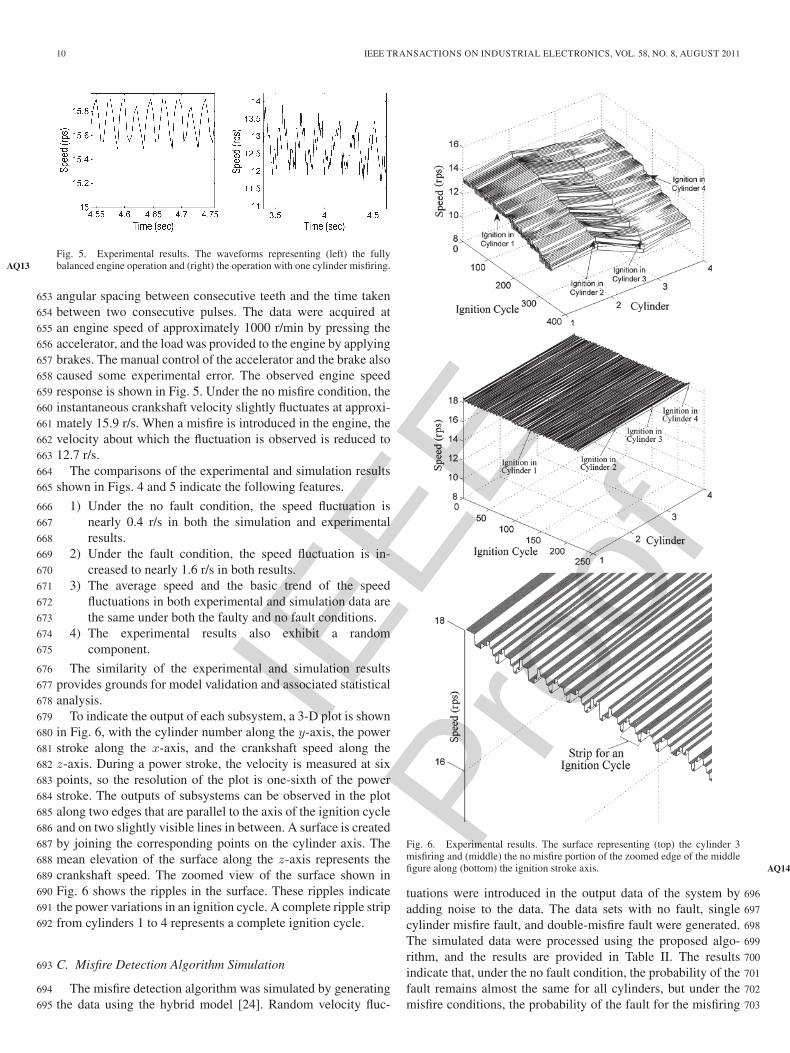
Fig. 5. Experimental results. The waveforms representing (left) the fullybalanced engine operation and (right) the operation with one cylinder misfiring.AQ13
angular spacing between consecutive teeth and the time taken653
between two consecutive pulses. The data were acquired at654
an engine speed of approximately 1000 r/min by pressing the655
accelerator, and the load was provided to the engine by applying656
brakes. The manual control of the accelerator and the brake also657
caused some experimental error. The observed engine speed658
response is shown in Fig. 5. Under the no misfire condition, the659
instantaneous crankshaft velocity slightly fluctuates at approxi-660
mately 15.9 r/s. When a misfire is introduced in the engine, the661
velocity about which the fluctuation is observed is reduced to662
12.7 r/s.663
The comparisons of the experimental and simulation results664
shown in Figs. 4 and 5 indicate the following features.665
1) Under the no fault condition, the speed fluctuation is666
nearly 0.4 r/s in both the simulation and experimental667
results.668
2) Under the fault condition, the speed fluctuation is in-669
creased to nearly 1.6 r/s in both results.670
3) The average speed and the basic trend of the speed671
fluctuations in both experimental and simulation data are672
the same under both the faulty and no fault conditions.673
4) The experimental results also exhibit a random674
component.675
The similarity of the experimental and simulation results676
provides grounds for model validation and associated statistical677
analysis.678
To indicate the output of each subsystem, a 3-D plot is shown679
in Fig. 6, with the cylinder number along the y-axis, the power680
stroke along the x-axis, and the crankshaft speed along the681
z-axis. During a power stroke, the velocity is measured at six682
points, so the resolution of the plot is one-sixth of the power683
stroke. The outputs of subsystems can be observed in the plot684
along two edges that are parallel to the axis of the ignition cycle685
and on two slightly visible lines in between. A surface is created686
by joining the corresponding points on the cylinder axis. The687
mean elevation of the surface along the z-axis represents the688
crankshaft speed. The zoomed view of the surface shown in689
Fig. 6 shows the ripples in the surface. These ripples indicate690
the power variations in an ignition cycle. A complete ripple strip691
from cylinders 1 to 4 represents a complete ignition cycle.692
C. Misfire Detection Algorithm Simulation693
The misfire detection algorithm was simulated by generating694
the data using the hybrid model [24]. Random velocity fluc-695
Fig. 6. Experimental results. The surface representing (top) the cylinder 3misfiring and (middle) the no misfire portion of the zoomed edge of the middlefigure along (bottom) the ignition stroke axis. AQ14
tuations were introduced in the output data of the system by 696
adding noise to the data. The data sets with no fault, single 697
cylinder misfire fault, and double-misfire fault were generated. 698
The simulated data were processed using the proposed algo- 699
rithm, and the results are provided in Table II. The results 700
indicate that, under the no fault condition, the probability of the 701
fault remains almost the same for all cylinders, but under the 702
misfire conditions, the probability of the fault for the misfiring 703

IEEE
Proo
f
RIZVI et al.: HYBRID MODEL OF THE GASOLINE ENGINE FOR MISFIRE DETECTION 11
TABLE IISIMULATION RESULTS OF THE MISFIRE DETECTION ALGORITHM
cylinder becomes larger. Under the double-misfire condition,704
the probability increases for both misfiring cylinders.705
D. Misfire Experiment (The Third Spark Plug Is Removed)706
The pulses from the crankshaft speed sensor were received,707
and the crankshaft speed was calculated. The calculated speed708
was demultiplexed into four streams associated with each sub-709
systems using the igniter signal. The data of 46 ignition cycles,710
with the fault introduced in cylinder 3, were analyzed. The711
calculated matrix F is shown in the following:712
F =
⎡⎢⎣
0 0 0 00 0 0 00 0 35 10 0 1 9
⎤⎥⎦ . (74)
MATLAB could not perform the EVD of matrix F , so one extra713
transition is provided to all possible state transitions, i.e., F is714
initially taken as a matrix with all ones rather than as a null715
matrix. The resulting matrix F is shown in the following:716
F =
⎡⎢⎣
1 1 1 11 1 1 11 1 36 21 1 2 10
⎤⎥⎦ . (75)
The calculated value of the limiting state probability is717
P (∞) = [0.0645 0.0645 0.6452 0.2258]. (76)
The limiting probability indicated the highest probability of the718
fault in the third cylinder, which correctly indicated the fault.719
E. No Misfire Experiment 1 (All Spark Plugs Are Present)720
Under the no misfire condition, the data of 592 ignition721
cycles were analyzed. The resulting matrix F is722
F =
⎡⎢⎣
294 10 6 311 76 9 55 12 105 42 4 6 40
⎤⎥⎦ . (77)
If, initially, all of the cylinders are faulty with equal probability723
P (0) = [0.25 0.25 0.25 0.25]. (78)
The limiting state probability was estimated to be724
P (∞) = [0.5167 0.1777 0.2163 0.0893]. (79)
A misfire condition in cylinder 1 is detected even when no725
misfire is intentionally introduced in the system. To explore726
the result, another experiment was conducted to study the air727
TABLE IIILEAKAGE IN THE CYLINDERS
Fig. 7. Limiting probability convergence in the balanced engine.
leakage from the cylinders. In this experiment, all of the four 728
spark plugs were removed, and a pressure gauge was installed 729
in their position. The gauges were set to retain the peak value 730
of the observed air pressure. The pistons were moved by using 731
the starter motor. The maximum pressure was created in the 732
cylinders during the compression stroke and was retained by the 733
pressure gauge. The observed values of the cylinder pressure 734
are given in Table III. The results of this experiment indicate a 735
slight pressure loss (misfire) due to the air leakage in the first 736
cylinder. The result is promising as the fault is detected when 737
no perceptible symptoms of the fault were present in the engine 738
operation. The ECU was also not telling any fault. 739
F. No Misfire Experiment 2 (Balanced Engine) 740
An experiment was conducted on the engine, with the cylin- 741
ders in the maximally balanced conditions, and the limiting 742
probabilities are plotted after each ignition cycle to establish the 743
convergence rate of the algorithm. The plot is shown in Fig. 7, 744
with the probability of the misfire in each cylinder between 0.2 745
and 0.33. These results are fairly consistent with the simulation 746
results of the no fault condition given in Table II. 747
The experimental results of the hybrid model (Fig. 6) also 748
provide some insight in the fault diagnostic method. 749
1) The residual vector corresponds to the maximum down- 750
slope of the surface observed from one cylinder to the 751
next cylinder during an ignition cycle [refer to Fig. 6 752
(top)]. 753
2) The cylinder number where the maximum slope of the 754
surface is observed represents the state of the Markov 755
chain. 756
3) Under the no fault condition, the surface of the 3-D plot 757
of the hybrid model shown in Fig. 6 (middle) is fairly 758
smooth. The surface, however, lost its smoothness when 759
the misfire fault occurs, as shown in Fig. 6 (top). 760
To establish the accuracy of the prediction of the proposed 761
algorithm, the ROC analysis was performed. 762

IEEE
Proo
f
12 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 58, NO. 8, AUGUST 2011
Fig. 8. ROC analysis of the fault detection algorithm.
VII. ROC ANALYSIS763
The objective of the ROC analysis is to study the accuracy764
of the algorithm as a function of n in (72). The analysis is765
performed for n = 0, n = 2, and n = 10. When n = 0, the state766
transition matrix is bypassed, and the fault decision is made767
purely on the basis of the observed residual. The proposed al-768
gorithm is essentially bypassed. When n = 2, a two-state ahead769
prediction is made, which is based on the past data, arranged as770
the state transition matrix. The affects of the algorithm would771
appear to some extent in the results. For n = 10, the results772
would be a closer approximation to the proposed algorithm,773
where n should be very large.774
For the ROC analysis, a binary classification {f3, nf} was775
assumed, where f3 represents a condition where the fault is776
present in the third cylinder and nf represents a condition777
where the fault is not present in the third cylinder. The lim-778
iting probability vector was calculated by the analysis of the779
experimental data of 50 ignition cycles, with the fault in the780
third cylinder. The estimated limiting probability vector was781
used to generate a predicted data set in each ignition cycle.782
These predicted data were used as a predicted instance and were783
classified to set {f3, nf}. The threshold for the classification784
was selected on the basis of the probability of the fault in the785
third cylinder, defined by the limiting probability vector. The786
predicted data set was then compared with the original data787
to identify the true positive events. The experiment was then788
repeated with the data from a maximally balanced cylinder789
with no misfire, and the false positive events were observed.790
Using the data of the true and false positive events, a confusion791
matrix was generated [28], and the data points were plotted on792
the ROC curve. Ten predicted data instances were generated,793
corresponding to each value of n, and were plotted on the ROC794
curve shown in Fig. 8. A convex hull and a chance line (major795
diagonal) were also plotted on the curve for analysis.796
Fig. 8 shows that all points corresponding to n = 0 are close797
to the chance line and are continuously crossing it, indicating798
a state of confusion. For n = 2, the cluster of points is shifted799
to the northwest side of the plot, indicating a better accuracy800
even with a rough approximation of the diagnosis algorithm.801
For n = 10, which is a better approximation of the proposed802
algorithm, the cluster of points is shifted further toward the803
northwest side and close to the convex hull, indicating even a804
better accuracy. This indicates that the residual analysis using 805
the limiting probability of the Markov chains results in a better 806
detection accuracy, with a small false alarm rate. 807
VIII. CONCLUSION 808
A hybrid switched linear model of the IC engine has been 809
proposed. This model is also extended for the analysis of 810
the probabilistic input variations. A fault diagnosis algorithm 811
that is based on the proposed model has also been presented. 812
The effectiveness of the hybrid model is established using 813
the simulation and experimental results. The effectiveness of 814
the proposed fault diagnosis algorithm is established using the 815
experimental results and the ROC analysis. It is also established 816
that the proposed algorithm is capable of detecting the incipient 817
faults to generate early fault warnings. The extension of the 818
proposed technique for the detection of multiple misfire, for 819
the misfire detection at low data rates that are compatible 820
to the ECU scan rate, and for the hardware development for 821
the proposed method is an area of future research for the 822
authors. 823
ACKNOWLEDGMENT 824
The authors would like to thank the research fellows of the 825
Control and Signal Processing Research Group, Mohammad 826
Ali Jinnah University, and the Center for Advanced Studies in 827
Engineering, Islamabad, Pakistan. 828
REFERENCES 829
[1] Y. L. Murphey, J. A. Crossman, Z. H. Chen, and J. Cardillo, “Automotive 830fault diagnosis—Part II: A distributed agent diagnostic system,” IEEE 831Trans. Veh. Technol., vol. 52, no. 4, pp. 1076–1098, Jul. 2003. 832
[2] J. A. Crossman, H. Guo, Y. L. Murphy, and J. Cardillo, “Automotive 833signal fault diagnostics—Part I: Signal fault analysis, signal segmentation, 834feature extraction and quasi-optimal feature selection,” IEEE Trans. Veh. 835Technol., vol. 52, no. 4, pp. 1063–1075, Jul. 2003. 836
[3] J. Luo, M. Namburu, and K. R. Pattipati, “Integrated model-based and 837data-driven diagnosis of automotive antilock braking system,” IEEE 838Trans. Syst., Man, Cybern. A, Syst., Humans, vol. 40, no. 2, pp. 321–336, 839Mar. 2010. 840
[4] M. Lee, M. Yoon, M. Sunwoo, S. Park, and K. Lee, “Development of 841a new misfire detection system using neural network,” Int. J. Automot. 842Technol., vol. 7, no. 5, pp. 637–644, 2006. 843
[5] J. Luo, K. R. Pattipati, L. Qiao, and S. Chigusa, “An integrated diagnos- 844tic development process for automotive engine control systems,” IEEE 845Trans. Syst., Man, Cybern. C, Appl. Rev., vol. 37, no. 6, pp. 1163–1173, 846Nov. 2007. 847
[6] Q. R. Butt and A. I. Bhatti, “Estimation of gasoline engine parameters 848using higher order sliding mode,” IEEE Trans. Ind. Electron., vol. 55, 849no. 11, pp. 3891–3898, Nov. 2008. 850
[7] E. Hendrick and S. C. Sorenson, “Mean value modeling of spark ignition 851engines,” presented at the Int. Congr. Expo., Detroit, MI, 1990, SAE 852Technical Paper 900616. 853
[8] A. Balluchi, L. Benvenuti, M. D. Di Benedetto, C. Pinello, and 854A. L. Sangiovanni-Vincentelli, “Automotive engine control and hybrid 855systems: Challenges and opportunities,” Proc. IEEE, vol. 88, no. 7, 856pp. 888–912, Jul. 2000. 857
[9] A. K. Sood, A. A. Fahs, and N. A. Henein, “Engine fault analysis: 858Part II—Parameter estimation approach,” IEEE Trans. Ind. Electron., 859vol. IE-32, no. 4, pp. 301–307, Nov. 1985. 860
[10] F. D. Torrisi and A. Bemporad, “HYSDEL—A tool for generating compu- 861tational hybrid models for analysis and synthesis problems,” IEEE Trans. 862Control Syst. Technol., vol. 12, no. 2, pp. 235–249, Mar. 2004. 863
[11] N. Giorgetti, G. Ripaccioli, and A. Bemporad, “Hybrid model predictive 864control of direct injection stratified charge engines,” IEEE/ASME Trans. 865Mechatronics, vol. 2, no. 5, pp. 499–506, Oct. 2006. 866

IEEE
Proo
f
RIZVI et al.: HYBRID MODEL OF THE GASOLINE ENGINE FOR MISFIRE DETECTION 13
[12] M. Iqbal, A. I. Bhatti, S. Iqbal, and Q. Khan, “Robust parameter esti-867mation of nonlinear systems using sliding mode differentiator observer,”868IEEE Trans. Ind. Electron., Feb. 2010, to be published.AQ15 869
[13] A. I. Bhatti, J. A. Twiddle, S. K. Spurgeon, and N. B. Jones, “Engine870coolant system fault diagnostics with sliding mode observers and fuzzy871analyser,” in Proc. IASTED Conf. Model., Identif. Control, Innsbruck,872Austria, 1999.873
[14] M. Nyberg and A. Perkovic, “Model based diagnosis of leaks in the air-874intake system of an SI-engine,” presented at the Int. Congr. Expo., Detroit,875MI, 1998, SAE Paper 980514.876
[15] R. Isermann, “Model based fault detection and diagnosis—Status and877applications,” Annu. Rev. Control, vol. 29, no. 1, pp. 71–85, 2005.878
[16] G. Biswas, M. O. Cardier, J. Lunze, L. T. Massuyes, and M. Staroswiecki,879“Diagnosis of complex systems: Bridging the methodologies of FDI and880DX communities,” IEEE Trans. Syst., Man, Cybern. B, Cybern., vol. 34,881no. 5, pp. 2159–2162, Oct. 2004.882
[17] L. A. Feldkamp, T. M. Feldkamp, and D. V. Prokhorov, “Adaptive classi-883fication,” in Proc. IEEE AS-SPCC, 2000, pp. 52–57.884
[18] M. Montini and N. Speciale, “Multiple misfire identification by a wavelet-885based analysis of crankshaft speed fluctuation,” in Proc. IEEE Int. Symp.886Signal Process. Inf. Technol., Aug. 2006, pp. 144–148.887
[19] G. Rizzoni, J. G. Pipe, R. N. Riggin, and M. P. VanOyen, “Fault isolation888and analysis for IC engine onboard diagnostics,” in Proc. 38th IEEE Veh.889Technol. Conf., Philadelphia, PA, 1988, pp. 237–244.890
[20] I. Morgan and H. Liu, “Predicting future states with n-dimensional891Markov chains for fault diagnosis,” IEEE Trans. Ind. Electron., vol. 56,892no. 5, pp. 1774–1781, May 2009.893
[21] J. Merkisz, P. Bogus, and R. Grzeszczyk, “Overview of engine misfire894detection methods used in on board diagnostics,” J. KONES Combust.895Engines, vol. 8, no. 1/2, pp. 326–341, 2001.896
[22] A. K. Sood, C. B. Friedlander, and A. A. Fahs, “Engine fault analysis:897Part I—Statistical methods,” IEEE Trans. Ind. Electron., vol. IE-32, no. 4,898pp. 294–300, Nov. 1985.899
[23] M. A. Rizvi, A. I. Bhatti, and Q. R. Butt, “Misfire detection in IC en-900gines using finite state automata,” in Proc. 15th Int. Conf. Soft Comput.901MENDEL, Brno, Czech Republic, Jun. 24–26, 2009, pp. 93–100.902
[24] M. A. Rizvi and A. I. Bhatti, “Hybrid model for early detection of misfire903fault in SI engines,” in Proc. IEEE 13th Int. Multitopic Conf., Nov. 2009,904pp. 1–6.905
[25] M. A. Rizvi, A. I. Bhatti, and Q. R. Butt, “Fault detection in a class of906hybrid system,” in Proc. ICET , Oct. 2009, pp. 130–135.907
[26] J. L. Speyer and W. H. Chung, Stochastic Processes, Estimation and908Control., 1st ed. Philadelphia, PA: SIAM, 2008, pp. 157–159.909
[27] P. K. Wong, L. M. Tam, K. Li, and C. M. Vong, “Engine idle speed910system modeling and control optimization using artificial intelligence,”911Proc. Inst. Mech. Eng. D, J. Automobile Eng., vol. 224, no. 1, pp. 55–72,912Jun. 2009.913
[28] T. Fawcett, “An introduction to ROC analysis,” Pattern Recognit. Lett.,914vol. 27, no. 8, pp. 861–874, Jun. 2006.915
[29] S. A. Arogeti, D. Wang, and C. B. Low, “Mode identification of hybrid916systems in the presence of fault,” IEEE Trans. Ind. Electron., vol. 57,917no. 4, pp. 1452–1467, Apr. 2010.918
Muddassar Abbas Rizvi received the B.S. de-919gree in electrical engineering from the University920College of Engineering, Taxila, Pakistan, in 1990921and the M.S. degree in systems engineering from922Quaid-e-Azam University, Islamabad, Pakistan. He923is currently working toward the Ph.D. degree at the924Mohammad Ali Jinnah University, Islamabad.925
He has an 18-year experience in electronic circuit926design and development. He has been working as a927Visiting Faculty Member with the National Univer-928sity of Science and Technology, Islamabad, for the929
last three years. He is the first author and coauthor of five conference papers. His930research interests include mathematical modeling, fault diagnostics, computer931programming, and electronic circuit designing.932
Aamer Iqbal Bhatti Sr. (SM’XX) received the AQ16933B.S. degree in electrical engineering from the AQ17934University of Engineering & Technology, Lahore, AQ18935Pakistan, in 1993, the M.S. degree in control systems AQ19936from the Imperial College of Science, Technology 937and Medicine, London, U.K., in 1994, and the Ph.D. 938degree in control engineering from the University of 939Leicester, Leicester, U.K., in 1998. 940
He worked on the idle speed control of the Ford 941Mondeo Engine for his Ph.D. research. He continued 942his stay at the University of Leicester for his post- 943
doctoral research on fault diagnostics and control of high-powered diesel 944engines, funded by Caterpillar. In 1999, he returned to Pakistan and started 945working for a consultancy firm (ERDC), providing services in the field of AQ20946aerospace controls, where he worked on nonlinear simulations of air vehicles, 947system identification, controller design for aerospace vehicles, and data acquisi- 948tion experiment design. He moved to Communications Enabling Technologies, 949Islamabad, Pakistan, in 2001, where he worked on the enhancements of the line 950echo cancellers used in VoIP. Later on, he cofounded the Center for Advanced 951Studies in Engineering (an engineering education institution) and CARE (an AQ21952R&D company). At CARE, he led a team that indigenously designed a radar 953signal processor and an ELINT system. In 2007, he joined the Mohammad Ali AQ22954Jinnah University, Islamabad, where he is currently a Professor of DSP and 955control systems with the Department of Electronic Engineering. He is the first 956author and coauthor of more than 35 refereed international papers, including 957four journal publications. His research interests are sliding mode applications 958and radar signal processing. 959
Qarab Raza Butt received the B.S. degree in me- AQ23960chanical engineering from the University College 961of Engineering, Taxila, Pakistan, in 1989, a post- 962graduate diploma in computer system software and 963hardware from the Computer Center, Islamabad, 964Pakistan, in 1990, and the M.S. degree in control AQ24965engineering from the Center for Advanced Studies 966in Engineering, Islamabad, in 2004, where he is 967currently working toward the Ph.D. degree. 968
Since 1990, he has been working in the industry 969as an Installation, Fabrication, and Design Engineer 970
for nearly 12 years. He is the first author and coauthor of more than 13 inter- 971national papers, including two journal publications. His research interests are 972mathematical modeling of dynamic systems for control and fault diagnostics. 973
IEEE
Proo
f
AUTHOR QUERIES
AUTHOR PLEASE ANSWER ALL QUERIES
AQ1 = Please verify the postal code provided.AQ2 = Please provide the expanded form of the acronym ‘MVEM.’AQ3 = Sentence was restructured to make it parallel. Please check if the thought is preserved.AQ4 = Please provide the expanded form of the acronym ‘NN.’AQ5 = The acronym ‘FPGA’ was defined as ‘field programmable gate array.’ Please check if appropriate.AQ6 = Please provide the expanded form of the acronym ‘LTI.’AQ7 = Sentence was restructured. Please check if the thought is preserved.AQ8 = Please provide the expanded form of the acronym ‘EFI.’AQ9 = Sentence was restructured. Please check if the thought is preserved.AQ10 = Sentence was restructured. Please check if the thought is preserved.AQ11 = Sentence was restructured. Please check if the thought is preserved.AQ12 = Fig. 4 caption was restructured. Please check if the thought is preserved.AQ13 = Fig. 5 caption was restructured. Please check if the thought is preserved.AQ14 = Fig. 6 caption was restructured. Please check if the thought is preserved.AQ15 = Please provide publication update in Ref. [12].AQ16 = Please provide membership history of author Aamer Iqbal Bhatti Sr.AQ17 = ‘Bachelor’s’ was captured as ‘B.S.’ Please check if appropriate.AQ18 = ‘UET’ was defined as ‘University of Engineering & Technology.’ Please check if appropriate.AQ19 = ‘Masters’ was captured as ‘M.S.’ Please check if appropriate.AQ20 = Please provide the expanded form of the acronym ‘ERDC.’AQ21 = Please provide the expanded form of the acronym ‘CARE.’AQ22 = Please provide the expanded form of the acronym ‘ELINT.’AQ23 = ‘Bachelor’s’ was captured as ‘B.S.’ Please check if appropriate.AQ24 = ‘Masters’ was captured as ‘M.S.’ Please check if appropriate.
END OF ALL QUERIES

IEEE
Proo
f
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 58, NO. 8, AUGUST 2011 1
Hybrid Model of the Gasoline Enginefor Misfire Detection
1
2
Muddassar Abbas Rizvi, Aamer Iqbal Bhatti, Sr., Member, IEEE, and Qarab Raza Butt3
Abstract—This paper proposes a novel hybrid model for an4internal combustion engine, with the power generated due to5combustion as the input and the crankshaft speed fluctuations as6the output. The individual cylinders of the engine are considered7as subsystems for which a nonlinear model, based on the physical8principles, is derived. The proposed model is linearized at an oper-9ating point, and a switched linear model is formed. The simulation10results of the proposed model are validated by matching the results11with the experimentally observed data. Using the properties of the12validated model, it is shown that the crankshaft speed variations13observed in the engine are a Markov process. A novel algorithm14that is based on the Markov chain is proposed to detect the15misfire in the spark ignition engines. In the ensuing engine rig16experiments, an igniter misfire is introduced in the system and17is successfully detected. The analysis of the data shows that the18engine also has an air leakage in a cylinder (a developing misfire),19which is experimentally confirmed later.20
Index Terms—Discrete event model (DEM), hybrid systems,21Markov chains, mean value model (MVM), misfire detection,22spark ignition (SI) engine.23
I. INTRODUCTION24
THE complexity of automotive vehicles is increasing as25
more and more mechanically driven parts are being re-26
placed by electronically driven actuators. An electronic control27
unit (ECU) is being installed in modern vehicles, which not28
only monitors the sensors installed in the vehicle but also29
controls the electronic actuators. The ECU also provides a di-30
agnostic code to identify different faults present in the vehicle.31
Fault prognosis in automotives is being studied for integration32
in future vehicles. Murphey indicated that the development of33
computationally simpler fault diagnosis algorithms for auto-34
motive systems is considered as the most challenging problem35
[1]. The problem is still being addressed by the research com-36
munity [1]–[4]. A survey of different automotive models and37
fault diagnosis techniques found in literature is provided.38
A general survey indicates that the spark ignition (SI) engine39
is mathematically represented by either the mean value model40
Manuscript received May 3, 2010; revised July 27, 2010; acceptedSeptember 9, 2010. This work was supported in part by the Higher EducationCommission and in part by the ICT Research and Development Fund ofPakistan.
M. A. Rizvi and A. I. Bhatti Sr. are with the Mohammad Ali Jinnah Univer-sity, Islamabad 44000, Pakistan (e-mail: [email protected]; [email protected]).
Q. R. Butt is with the Center for Advanced Studies in Engineering, G-5/1,Islamabad, Pakistan (e-mail: [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TIE.2010.2090834
(MVM) [6], [7] or the discrete event model (DEM) [8]. The 41
MVM is based on the average torque generated in a complete 42
ignition cycle. The model therefore cannot efficiently detect any 43
fault during an individual stroke of an ignition cycle. The DEM 44
is a hybrid model, with states representing the compression, 45
ignition, expansion, and exhaust strokes described as nonlinear 46
differential equations. The engine state is defined by solving 47
all four nonlinear equations. Due to a high computational load, 48
both MVM and DEM are difficult to solve in embedded sys- 49
tems, and they could not attract the fault diagnostic community, 50
especially for misfire fault detection. Luo et al. mentioned that 51
the algorithms executed in the ECU are required to be simpler 52
than most models or signal-based algorithms proposed by the 53
academia [5]. Sood et al. proposed a kinematic model, with 54
the fuel as the input and the crankshaft velocity as the output 55
[9]. The model is based on forces acting on the piston due to 56
the combustion of fuel in the engine cylinder and load acting 57
on the engine. The model was used for the detection of the 58
misfire fault using parameter estimation, and it was concluded 59
that the model-based approach proved to be computationally 60
expensive. Wong et al. proposed an engine model based on the 61
experimental sample data using neural network methods [27]. 62
The model is, however, explicitly applicable only to idle speed 63
control applications. A hybrid modeling approach was used for 64
other automotive applications but not for fault detection [10], 65
[11]. An addition to hybrid modeling is the representation of 66
the discrete states as modes of hybrid system, and each mode 67
system is governed by different continuous dynamics. Mode 68
identification in the presence of fault is carried out by a rule- 69
based analysis of the analytic redundancy relations [29]. The 70
fault diagnosis is based on either model or signal data analysis. 71
Model-based fault diagnosis methods have the advantage that 72
the signal features associated with fault have a physical inter- 73
pretation [9], e.g., the discharge coefficient estimated using the 74
sliding mode observer provides an insight about the physical 75
significance of a parameter [6], [12]. Methods that are based 76
on MVEM were applied for fault diagnosis in coolant systems AQ277
[13], air paths before and after a throttle valve [14], etc. Most 78
of these techniques used state observers, parity equations, or 79
parameter estimation techniques for fault diagnosis [15]. The 80
parameter values forming the basis of fault detection in the 81
model-based method also change with the operating conditions, 82
like load, ambient temperature, pressure, vehicle aging, etc. 83
The value of the discharge coefficient estimated using the 84
sliding mode observer under different load conditions indicates 85
this parameter variation [6]. Sood et al. mentioned that fault 86
diagnosis using some parameters which are not constant leads 87
to the further increase in the complexity of the fault diagnostic 88
0278-0046/$26.00 © 2011 IEEE

IEEE
Proo
f
2 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 58, NO. 8, AUGUST 2011
problem [9]. The heavy computational load and the adaptive89
selection of the threshold values for fault detection added so90
much complexity that not only restricts their application only91
to offline fault detection but also increases the trend of using92
the statistical tools by the fault diagnostics and isolation (using93
control engineering tools) community [16]. The signal-basedAQ3 94
methods identify the features linked with faults in a signal.95
Residual analysis is carried out to identify these features.96
Crossman described some features associated with faults and97
methods to identify them [2].98
Misfire fault occurs when a combustion does not occur in99
one or more engine cylinders. It may occur due to a missing100
spark, an air leakage, or a fault in fuel injection. A number of101
techniques that are based on an artificial neural network were102
used to detect the misfire fault [4], [17]. Feldkamp proposed103
techniques that characterize fault states as hidden states in a104
hidden Markov model and used extended Kalman filter esti-105
mates for NN training [17]. It seems that the author implicitlyAQ4 106
assumed a stochastic analysis and a linearized version of some107
engine nonlinear models. Since the engine is a highly nonlinear108
system whose output depends on a large number of factors, it109
would be difficult to simulate all possible healthy and faulty110
conditions to train the neural network to ensure a robust fault111
detection. Montini proposed a wavelet-based analysis of the112
crankshaft speed fluctuation signal [18], and Rizzoni [19] and113
Sood [22] proposed different data classification methods to114
decide between the binary hypothesis conditions of the fault and115
no fault conditions using a correlation analysis of the data. Both116
wavelet- and correlation-based methods were computationally117
heavy, and the algorithm also needed heuristic guidelines to118
extract the features and to relate to the faults. Although the ap-119
plication of the Markov chains for fault diagnosis can be found120
in the literature [20], however, disturbances that are due to faults121
in dynamic systems have not been proved as a Markov process122
for fault diagnosis and isolation. This paper proves these dis-123
turbances as a Markov process. Morgan et al. indicated that the124
potential advantage of the application of the Markov chains is125
its ability to predict, and they applied it to predict the future con-126
centration of the elements in the lubricant analysis of the marine127
engine [20], where an early prediction is important due to the128
maintenance problems when the ship is at the sea [20]. Luo129
mentioned that the recently introduced new approaches for fault130
diagnosis combined model-based and data-driven techniques131
to obtain a better diagnostic performance [3]. A method that132
transforms the engine speed fluctuations to finite state automata133
is presented in the literature, which stressed on the implemen-134
tation using a field programmable gate array (FPGA) [23].AQ5 135
The objective of this paper is to develop a novel mathematical136
model for SI engines that can explain the crankshaft speed137
fluctuations when a deterministic input with a small randomly138
varying component is applied to the SI engine. The utility of the139
proposed model is expressed by presenting a novel method for140
misfire detection. The proposed method is based on the speed141
fluctuation of the crankshaft. The method is simple and cost142
effective, and it needs no additional installation as the sensor is143
preinstalled in all modern vehicles [21].144
This paper is organized as follows. Section II presents a145
hybrid mathematical model that is used to represent the steady-146
state behavior of the internal combustion (IC) engine [24], [25]. 147
A nonlinear model representing the motion of the piston in 148
the engine cylinders is derived using the physical principles 149
to represent the subsystems of the hybrid model. The non- 150
linear model is linearized at an operating point, and the engine 151
is taken as a switched linear hybrid system. The properties 152
of the proposed hybrid system are investigated. Section III 153
presents the statistical analysis of the system output against a 154
random variation of the inlet air, and finally, the fluctuation 155
in the crankshaft speed is proved to be a Markov process. 156
Section IV presents the algorithm for fault diagnosis, and a 157
comparison of the presented method with an existing method 158
is provided in Section V. The simulation and experimental 159
results are presented, analyzed, and discussed in Section VI. 160
The relative/receiver operating characteristic (ROC) analysis is 161
presented in Section VII. The concluding remarks are given in 162
Section VIII, and the references are given at the end. 163
II. SYSTEM MODELING 164
For system modeling, a four-cylinder four-stroke engine is 165
assumed, where the ignition occurs in only one cylinder at a 166
time. The pistons of the four cylinders are coupled to a common 167
shaft via a crankshaft. The power strokes of all cylinders are 168
separated from each other by 180◦, and they periodically occur 169
after two shaft revolutions, named as an ignition cycle. During 170
a power stroke, the air–fuel mixture is burnt inside the cylinder, 171
and pressure develops in the chamber of the cylinder, applying 172
force on the piston. The modeling is carried out in the following 173
two steps. 174
1) In the first step, a deterministic switched linear model, 175
with the power generated by the fuel combustion as the 176
input and the crankshaft angular velocity as the output, is 177
presented in Section II-A–II-E. 178
2) In the second step, the statistical properties of the air in- 179
take in the cylinder are studied to establish that the crank- 180
shaft speed fluctuations are Gaussian and Markov. The 181
properties of air are explored because the engine power is 182
manipulated by controlling the amount of air intake. 183
A. Hybrid Model 184
The SI engine is modeled as a hybrid system with four iden- 185
tical minimum phase LTI subsystems, where each subsystem AQ6186
represents an engine cylinder. A subsystem/cylinder is active 187
when it contributes power to the system, i.e., during a power 188
stroke. The subsystems are sequentially actuated during an 189
ignition cycle. The output of the system would be a vector 190
sum of the outputs of the subsystems. The following are the 191
modeling assumptions. 192
Assumption 1: The system operates at a steady-state condi- 193
tion on a constant load. 194
Assumption 2: The air–fuel ratio is stoichiometric. 195
Assumption 3: The whole energy is instantaneously added at 196
the beginning of the power stroke and is delivered to a storage 197
element (flywheel) at a constant rate. 198
Assumption 4: At any time instant, only one cylinder would 199
receive an input to become active, and it exerts force on the 200

IEEE
Proo
f
RIZVI et al.: HYBRID MODEL OF THE GASOLINE ENGINE FOR MISFIRE DETECTION 3
piston and other cylinders that are being passive due to suction.201
The compression and exhaust processes contribute to the engine202
load torque.AQ7 203
If the period of the ignition cycle is T , u(t) is the system204
input at time t during an ignition cycle, and ui(t) is the input of205
the ith subsystems. Based on Assumption 4206
ui(t) = u(t) when(i − 1)T
4< t <
iT
4, i = 1, 2, 3, 4 (1)
ui(t) = 0 otherwise. (2)
The framework of the hybrid model for a maximally balanced207
SI engine with four cylinders is represented as a five-tuple208
model 〈μ,X,Γ,Σ, φ〉. The basic definition of the model para-209
meters is given in the following.210
1) μ = {μ1, μ2, μ3, μ4}, where each element of the set211
represents the active subsystem of the hybrid model.212
2) X ∈ R2 represents the state variable of the continu-213
ous subsystems. It would be proved in the next section214
that vector X would have velocity and acceleration as215
components.216
3) Γ = {G(s)}, where G(s) is the transfer function of the217
linear subsystems. For the maximally balanced cylinder,218
the set contains a single element. The transfer function219
G(s) is derived in Sections II-B–II-D of this section. The220
model can be defined in state space as221
x(t) =AX + BU (3)y(t) =CX + DU (4)
where222
U ∈ R A ∈ R2×2 B ∈ R2×1 C ∈ R1×2 D ∈ R.
4) Σ : μ → μ represents the generator function that defines223
the activation of the next subsystem after the activity224
of the current subsystem end. The generator function is225
defined in terms of the crankshaft position as226
Σ =
⎧⎪⎪⎨⎪⎪⎩
μ1 4nπ ≤∫
θ1dt < (4n + 1)πμ2 (4n + 1)π ≤
∫θ1dt < (4n + 2)π
μ3 (4n + 2)π ≤∫
θ1dt < (4n + 3)πμ4 (4n + 3)π ≤
∫θ1dt < (4n + 4)π
(5)
where n = 0, 1, 2 and∫
θ1dt represents the instantaneous227
shaft position that identifies the output of the generator228
function.229
5) φ : Γ × μ × X × u → X defines the initial condition for230
the next subsystem after a switching event, where u231
represents the input of the active subsystem. Fig. 1 shows232
the subsystems and switching sequence of the proposed233
engine hybrid model.234
B. Nonlinear Subsystem Modeling235
Consider δQ as the amount of energy added in the system236
by burning the air–fuel mixture. Based on Assumption 3, the237
energy is instantaneously added in the cylinder. This will appear238
as an increase in the internal energy of the system239
δU = δQ. (6)
Fig. 1. Hybrid system with four subsystems.
A part of this internal energy is used to do work, and the rest of 240
the energy is drained in the coolant and exhaust system. If the 241
internal energy changes to work with the constant efficiency ηt, 242
then work δW is given by the energy balance equation as 243
δW = −ηtδU. (7)
Using (6) 244
δW = −ηtδQ. (8)
If p is the pressure due to the burnt gases, then the work done 245
during the expansion stroke is given by 246
W =
V 2∫V 1
pdV (9)
where V1 and V2 are the initial and final volumes of the cylinder 247
during expansion. For adiabatic expansion 248
pV γ = k1 (10)
where k1 and γ are constant. Hence, (9) becomes 249
W =
V 2∫V 1
k1V−γdV (11)
W = k1V −γ+1
2 − V −γ+11
−γ + 1. (12)
Consider the closed end of the piston as the origin. Also, 250
assume that A is the surface area of the piston and x is a 251
continuous variable that represents the instantaneous piston 252
position. When the piston moves a small distance δx from 253
its initial position x, where δx is constant and where it can 254
be arbitrarily chosen to be small, then the work done can be 255
expressed as 256
δW = k1[A(x + δx)]−γ+1 − [Ax]−γ+1
−γ + 1(13)
δW = k1A−γ+1
−γ + 1[(x + δx)−γ+1 − x−γ+1
](14)
δW =k1A
−γ+1
−γ + 1
[x−γ+1
(1 +
δx
x
)−γ+1
− x−γ+1
](15)
δW =k1A
−γ+1x−γ+1
−γ + 1
[(1 +
δx
x
)−γ+1
− 1
]. (16)

IEEE
Proo
f
4 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 58, NO. 8, AUGUST 2011
Expanding (16) using a binomial series, neglecting the higher257
powers of δx, and simplifying258
δW = k1A−γ+1x−γδx. (17)
Using (8), (17) becomes259
δQ =k1A
−γ+1x−γδx
ηt. (18)
If F is the force applied by the burnt gases, m is the mass of the260
engine moving assembly (piston, connecting rod, crankshaft,261
and flywheel), k2 is the coefficient of friction, and k3 is the262
coefficient of elasticity, then the net force acting on the piston263
is given by264
md2x
dt2= F − k2
dx
dt− k3x (19)
md2x
dt2+ k2
dx
dt+ k3x = F. (20)
The net work done by the expanding gases against the load,265
friction, and elastic restoring forces when the piston moves by266
a small distance δx would be given as267 [m
d2x
dt2+ k2
dx
dt+ k3x
]δx = δW. (21)
Using (17), the aforementioned equation becomes268 [m
d2x
dt2+ k2
dx
dt+ k3x
]δx = k1A
−γ+1x−γδx. (22)
The displacement δx can be chosen to be constant and ar-269
bitrarily small. As the piston moves, the volume inside the270
combustion chamber increases, resulting in the reduction of the271
instantaneous pressure on the piston. The instantaneous power272
is therefore a function of the piston position. The instantaneous273
power delivered by the engine would be calculated by differen-274
tiation as275 [m
d3x
dt3+ k2
d2x
dt2+ k3
dx
dt
]δx = − k1γA−γ+1x−γ−1 dx
dtδx
(23)
md3x
dt3+ k2
d2x
dt2+ k3
dx
dt= − k1γA−γ+1x−γ−1 dx
dt.
(24)
Write (24) in terms of velocity v as276
md2v
dt2+ k2
dv
dt+ k3v = − γηt
k1A−γ+1x−γδx
ηt
v
xδx(25)
md2v
dt2+ k2
dv
dt+ k3v = γηtδQ
v
xδx(26)
md2v
dt2+ k2
dv
dt+ k3v =
γηtv
x
δQ
δt
δt
δx. (27)
Equation (27) represents a nonlinear model of the crankshaft277
speed when the power is provided to the engine by fuel ignition.278
C. Model Linearization 279
For model linearization, consider that the piston always 280
moves between two extreme positions xt and xb, where xt 281
represents the piston position at the top dead center (TDC) 282
and xb represents the piston position at the bottom dead center 283
(BDC). Therefore, x can never be zero, and the right-hand side 284
(RHS) of (27) is a smooth function. The model is therefore 285
linearized at the TDC. 286
If a constant finite power P is added to a cylinder when its 287
piston is at the TDC and the system delivers power P (x), then 288
the power delivered by system would be given as 289
md2v
dt2+ k2
dv
dt+ k3v =
γηvt
xP (x)
1v
(28)
md2v
dt2+ k2
dv
dt+ k3v =
γηt
xP (x). (29)
Linearizing the system at the TDC (x = xt) under the 290
steady-state condition, (29) is written as 291
md2v
dt2+ k2
dv
dt+ k3v =
γηt
xtP (x). (30)
Based on Assumption 3, the system is delivering power at 292
a constant rate; hence, P (x) is taken as constant. The RHS of 293
(30) is therefore constant, and the expression becomes a linear 294
differential equation. 295
D. Model Parameter Estimation 296
The engine operating power can be estimated by using the 297
manifold air pressure/manifold air flow sensors and by esti- 298
mating the mass of the fuel sprayed and the heat equivalent of 299
the fuel. The typical value of the efficiency of the SI engine 300
is nearly 35%. All of the parameters on the RHS of (30) are 301
known, except the elasticity k3 and friction coefficients k2. 302
The movement of the piston exhibits a periodic behavior, 303
with the same fundamental frequency as that of the rotational 304
speed of the engine shaft. This provides a heuristic guideline in 305
choosing the value of k3 as a function of the crankshaft angular 306
speed. The empirical choice is validated using the simulation 307
and experimental results reported later 308
k3 = ω2 = (2πN)2 (31)
where N is the engine speed in revolution per second. 309
During experimental verification, the load is also applied by 310
friction. Most frictional models described in literature are based 311
on the empirical relations as a polynomial in the engine speed. 312
A simplified frictional model is chosen, with a term containing 313
only the square of the engine speed 314
k2 = b ω2. (32)
On the basis of the simulation and experimental results, it is 315
established that the optimal selection of the value of b varies 316
between 0.2 and 0.5. The values of parameters k1 and k2 depend 317
on the operating point. The stability of the linearized subsystem 318
is ensured by the Routh–Hurwitz criteria. 319

IEEE
Proo
f
RIZVI et al.: HYBRID MODEL OF THE GASOLINE ENGINE FOR MISFIRE DETECTION 5
E. Model Properties320
The properties of the hybrid model when the engine is oper-321
ating under the steady-state conditions are presented as a set of322
propositions, lemmas, and theorems given in the following.323
Proposition 1: When the engine is running with a constant324
speed, the input to the engine system is a periodic impulse train325
with a period of T/4, where T is the period of the ignition326
cycle. This is because the energy is added in the engine as an327
impulse (Assumption 3), and the event of the addition of the328
energy occurs four times during an ignition cycle energy, i.e.,329
once in each cylinder.330
Lemma 1: Under the no misfire condition, the system output331
exhibits a periodic ac component with a period of T/4, where332
T represents the period of the ignition cycle (two revolutions).333
Proof: When all subsystems are identical and when they334
are represented by a linear model, then a periodic input with a335
period of T/4 would produce a periodic output with the same336
frequency.337
Lemma 2: When a cylinder misfires, the output of the system338
exhibits a periodic ac component with a period of T .339
Proof: The misfire can be considered as the loss of one340
of every fourth impulse of the input signal. The input signal is341
therefore periodic, with a period of T rather than T/4, and the342
output also exhibits a fundamental frequency of T .343
Lemma 3: Under the no misfire fault condition, the output344
contains four identical peaks in an ignition cycle.345
Proof: The input signal during an ignition cycle contains346
four impulses. As the subsystems are stable LTI minimum347
phase second-order systems, they exhibit one peak in the output348
against each impulse occurring in the impulse train input.349
Lemma 4: In the steady-state conditions with fault in the ith350
event, no peak would be observed due to the input of the ith351
subsystem.352
Proof: The absence of an impulse at the ith place in353
the input signal would result in the loss of the corresponding354
peak.355
The results of Lemmas 1, 2, 3, and 4 can be observed from356
the simulation and experiment results discussed later.357
Definition 1: The system is said to be in the steady state358
when the net change in the system output v(t) in one complete359
ignition cycle is zero360
v(t + T ) = v(t). (33)
Theorem 1: Under the steady-state and no fault conditions361
when the same input is given to the identical subsystems (max-362
imally balanced cylinders), the response of each subsystems363
would be independent.364
Proof: If u is the input to a subsystem, v(0) is the initial365
condition, and h(t) is the impulse response of a subsystem, then366
the output of the second subsystem (i.e., at time t, where T/4 <367
t < 2T/4) is given by368
v(t) = v(0) +
T4∫
0
h(t − τ)u(τ)dτ +
t∫T4
h(t − τ)u(τ)dτ.
(34)
Based on Lemma 1, the output signal is periodic, with a period 369
of T/4; therefore 370
v(T/4) = v(0) (35)
v(0) +
T4∫
0
h(t − τ)u(τ)dτ = v(0) (36)
and (34) becomes 371
v(t) = v(T/4) +
t∫T4
h(t − τ)u(τ)dτ. (37)
Hence, during the activation time of the second subsystem, 372
the output depends only on the input u(t) and the impulse 373
response of the second subsystem, and it is independent from 374
the response of the first subsystem. Similarly, it can be proved 375
that, under the steady-state conditions, the responses of all 376
cylinders are independent. 377
Proposition 2: For an EFI engine, the air intake in the AQ8378
cylinders is measured, and a fuel that is proportional to the 379
amount of air intake is sprayed into it. Therefore, the power 380
input to the system in the steady-state conditions is proportional 381
to the amount of air sucked. 382
The following corollaries that are based on the properties 383
of the proposed hybrid model would be used for onward sta- 384
tistical analysis and for the development of the fault detection 385
methodology. 386
Corollary 1: Four peaks would be observed in one ignition 387
cycle of a four-cylinder SI engine (Lemma 3). 388
Corollary 2: The amplitudes of the four observed peaks 389
represent four independent events (Theorem I). 390
Corollary 3: The crankshaft speed is proportional to the 391
input power (due to a linear model of the subsystems). 392
Corollary 4: The crankshaft speed is proportional to the 393
amount of air intake (based on Corollary 3 and Proposition 2). 394
III. STATISTICAL ANALYSIS 395
The air intake is considered as a random variable, and the 396
statistical analysis is carried out in the following steps. 397
1) Determine the probability density function (pdf) of the 398
random variable representing the peak values of the 399
velocity observed in an ignition cycle. 400
2) Form a collection of the aforementioned random variable. 401
3) Prove that the aforementioned collection is Gaussian and 402
Markov. 403
A. Step 1 404
Using Corollary 4, it can be established that the pdf of the 405
air intake in the engine cylinders and the crankshaft speed are 406
similar. The problem of finding the pdf of the peak value of the 407
velocity is therefore reduced to finding the pdf of the peaks of 408
the air intake. The pdf of the air intake is estimated by a series of 409
three hypothetical experiments representing the suction of air in 410
the engine cylinders. The hypothetical experiment is a statistical 411

IEEE
Proo
f
6 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 58, NO. 8, AUGUST 2011
experiment which is not actually conducted, but the statistical412
properties of the events generated by it could be analyzed.413
1) Hypothetical Experiment 1: Consider a hypothetical ex-414
periment of counting the number of molecules sucked in the415
cylinder as the piston moves by a differential amount δx → 0.416
The sample space for this hypothetical experiment would be417
{Nmin, Nmin + 1, . . . , Nmax}, where Nmin represents the min-418
imum number of air molecules that are sucked during any419
differential movement δx (where δx → 0) and Nmax is defined420
vice versa. Each differential movement δx of the piston during421
the suction stroke produces an event of this experiment. A422
random variable ψi is defined on the sample space that assigns423
some probability P (·) to each element of this sample space.424
The pdf for this variable can be assumed to be uniform and425
independent and identically distributed as the amount of air426
sucked in the cylinder depends upon the pressure difference427
between the cylinders and the manifold, and the suction stroke428
of the SI engine always occur at a constant pressure.429
2) Hypothetical Experiment 2: The second hypothetical ex-430
periment is defined as counting the total number of molecules431
sucked by the cylinder as the piston moves from the TDC to432
the BDC. Each suction cycle would generate an event of this433
experiment. A random variable for the events of this experiment434
can be expressed as a sum of the large number of samples of435
hypothetical experiment 1436
ξk =∑
i
ψi. (38)
Using the central value theorem, it can be concluded that the437
pdf of this variable is a Gaussian distribution.438
3) Hypothetical Experiment 3: This hypothetical experi-439
ment is defined as counting the maximum number of molecules440
sucked by any of the four cylinders during an ignition cycle.441
A random variable of this experiment also represents the sum442
of the large number of samples of experiment 1, and hence,443
it is a Gaussian variable. If Xm,i is a random variable that444
represents the maximum air that is sucked in the ith cylinder445
and in the mth ignition cycle, where i ∈ {1, 2, 3, 4} and m ∈446
{1, 2, 3, . . .}, then Xm,i is a Gaussian variable.AQ9 447
B. Step 2448
Defining a collection Z of Xm,i and ignoring the index i for449
simplicity450
Z = {X1,X2, . . . , Xn} (39)
where n represents the number of samples, which can be very451
large. The collection Z is our variable of interest, which is452
claimed as Gaussian and Markov processes.453
C. Step 3454
In the following two sections, it is proved that collection Z is455
Gaussian and Markov.456
1) Proof (Collection Z Is Gaussian): Corollary 2 in457
Section II ensures the independence of the events of collection458
Z. The method of the proof is adopted from Speyer [26] and is459
applied to the problem at hand. The characteristic function of 460
the collection is 461
ΦZ(ω1, ω2, . . . , ωn) = E[ejωT Z ] (40)
where ω is the frequency variable. The exponent can be 462
expanded as 463
ωT Z =ω1X1 + ω2X2 + · · · + ωnXn (41)ωT Z =ωn(Xn − Xn−1) + (ωn + ωn−1)(Xn−1 − Xn−2)
+ · · · + (ωn + · · · + ω1)X1. (42)
Here, Xi − Xi−1 = ΔXi represents the difference between the 464
peak values of the air sucked during two successive ignition 465
cycles. Equation (34) therefore becomes 466
ΦZ(ω1, ω2, . . . , ωn) = E[ejωnΔXnej(ωn+ωn−1)ΔXn−1 · · ·
×ej(ωn+ωn−1+···+ω1)X1
](43)
ΦZ(ω1, ω2, . . . , ωn) = ΦΔXn(ωn)ΦΔXn−1(ωn + ωn−1) · · ·
× ΦX1(ωn + ωn−1 + · · · + ω1). (44)
The collection would be a Gaussian process if its characteristic 467
function is Gaussian. As X1 is Gaussian, the collection would 468
be a Gaussian if ΔXi is also Gaussian 469
ΔXn =Xn − Xn−1 (45)
Xn =Xn−1 + ΔXn. (46)
Xn and Xn−1 represent the maximum air sucked during differ- 470
ent strokes of two different ignition cycles of the engine. Using 471
Corollary 2, these strokes are independent, so Xn and ΔXn−1 472
are independent. The characteristic function of Xn becomes 473
ΦXn= ΦXn−1ΦΔXn
(47)
ΦΔXn=
ΦXn
ΦXn−1
. (48)
However, as both Xn and Xn−1 are Gaussian 474
ΦXn= e−
ω2σ2n
2 ΦXn−1 = e−ω2σ2
n−12 .
Hence 475
ΦΔXn= e−
ω2(σ2n−σ2
n−1)2 (49)
which is the characteristic function of a Gaussian random 476
variable with zero mean and variance σ2n − σ2
n−1. This indicates 477
that the difference between the maximum air sucked observed 478
during two consecutive ignition cycles is Gaussian. Consider 479
a collection of nonoverlapping increment Y . The collection 480
represents the difference between the maximum air sucked in 481
any of the four cylinders during two successive ignition cycles 482
for n ignition cycles 483
Y = {X1,X2 − X1, . . . , Xn − Xn−1}(50)
Y = {X1,ΔX2, . . . ,ΔXn}. (51)
IEEE
Proo
f
RIZVI et al.: HYBRID MODEL OF THE GASOLINE ENGINE FOR MISFIRE DETECTION 7
Based on Assumption 2, the suction in different cylinders is484
independent, which ensures that events of set Y also form485
a set of independent events. The distribution function of the486
nonoverlapping increment of the collection can be written as487
fX1,...,ΔXn(x1, x2 − x1, . . . , xn − xn−1)
=n∏
i=1
1σ√
2πe
−(xi−xi−1)2
2σ2 (52)
fX1,...,ΔXn(x1, x2 − x1, . . . , xn − xn−1)
=n∏
i=1
fΔXi(xi − xi−1) (53)
where x0 is assumed to be zero. This indicates that X is488
Gaussian. Using (44), it is established that collection z is489
Gaussian, and it has an independent increment.AQ10 490
2) Proof (Collection Z Is Markov): By definition491
FXn|X1,...,Xn−1(xn|x1, . . . , xn−1)
= P (Xn ≤ xn|X1 = x1, . . . , Xn−1 = xn−1). (54)
Given the past sequence, the RHS of the equation can be492
transformed in terms of increments493
FXn|X1,...,Xn−1(xn|x1, . . . , xn−1)
= P (Xn−Xn−1≤xn−xn−1|Xk−Xk−1 =xk−xk−1) (55)
where k = 1, 2, . . . , n − 1494
The independent increment property of the collection enables495
us to change the conditional probability with unconditional496
probability. Therefore497
FXn|X1,...,Xn−1(xn|x1, . . . , xn−1) = FΔXn(xn − xn−1).
(56)
It has been proved earlier that ΔXi is also Gaussian498
FΔXn(xn − xn−1) =
xn∫−∞
1σ√
2πe
−(η−xn)2
2σ2 dη (57)
FΔXn(xn − xn−1) =
xn∫−∞
1σ√
2πe
−η2−x2n+2ηxn
2σ2 dη (58)
FΔXn(xn − xn−1) =
∫ xn
−∞1
σ√
2πe
−η2−2x2n+2ηxn
2σ2 dη
e−x2n√
σ2π
(59)
FΔXn(xn − xn−1) =
∫ xn
−∞ fXnXn−1(η, xn−1)dη
fXn−1(xn−1)(60)
FΔXn(xn − xn−1) =FXn|Xn−1(xn|xn−1). (61)
Therefore, (56) becomes499
FXn|X1,...,Xn−1(xn|x1, . . . , xn−1) = FXn|Xn−1(xn|xn−1).(62)
The collection Z therefore represents a Markov process. The500
events of this collection are the maximum amount of air sucked501
in any cylinder during an ignition cycle. Based on Corollary 502
4, it is deduced that the collection of the events generated by 503
the peaks observed in the crankshaft speed is also Gaussian and 504
Markov. The basic philosophy of the proposed fault diagnostic 505
method is based on the peak velocities associated with four 506
identical subsystems. In a healthy engine, the largest peak 507
observed in an ignition cycle can belong to any of the four 508
cylinders with equal probability. Under faulty conditions, the 509
smallest peak would correspond to the faulty cylinder with 510
highest frequency due to power loss. The difference between 511
two consecutive peaks is therefore taken as a measure of the 512
power loss due to the faulty cylinder. 513
IV. FAULT DETECTION METHODOLOGY 514
There are two basic steps in most fault detection techniques, 515
i.e., residual generation and residual evaluation. In the proposed 516
algorithm, the difference between the peak values of the veloc- 517
ity in two consecutive cylinders is used for residual generation. 518
The step of residual evaluation is carried out using Markov 519
chains. 520
The instantaneous crankshaft speed is measured by acquiring 521
the data from the crankshaft speed sensor at a sufficiently high 522
data rate. The igniter signal is used to associate the data with 523
a specific cylinder. The peak value of the velocity during the 524
ignition stroke of each cylinder is identified in each ignition 525
cycle. If v1, v2, v3, and v4 are the peak values of the velocity in 526
the ith ignition cycle, a residual vector di is defined as 527
di = [v1 − v2 v2 − v3 v3 − v4 v4 − v1]. (63)
v1 in the fourth terms of the residual vector represents the shaft 528
velocity in the i + 1th ignition cycle, which is the next power 529
stroke after the fourth ignition stroke of the ith ignition cycle. 530
For a residual analysis using the Markov chains, a set of four 531
states si, i = 1, 2, 3, 4, is defined as 532
s1 : max(di) = 1, i = 1, 2, 3, 4 (64a)
s2 : max(di) = 2, i = 1, 2, 3, 4 (64b)
s3 : max(di) = 3, i = 1, 2, 3, 4 (64c)
s4 : max(di) = 4, i = 1, 2, 3, 4. (64d)
A single-state transition event from state si to sj in the mth 533
ignition cycles is defined as a matrix Fm, with one in the jth 534
row and in the ith column and zero elsewhere, i.e., 535
Fm =
⎡⎢⎣
0 0 0 00 0 1 00 0 0 00 0 0 0
⎤⎥⎦ . (65)
Equation (65) represents that the maximum power loss is ob- 536
served in the third cylinder in the mth ignition cycle and in the 537
second cylinder in the (m + 1)th ignition cycle. A matrix F 538
is defined by adding the state transition events of the multiple 539
ignition cycles as 540
F =∑m
Fm, m = 1, 2, 3, . . . . (66)

IEEE
Proo
f
8 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 58, NO. 8, AUGUST 2011
Matrix F contains the frequency of occurrence of all state541
transitions as542
F =
⎡⎢⎣
f11 f12 f13 f14
f21 f22 f23 f24
f31 f32 f33 f34
f41 f42 f43 f44
⎤⎥⎦ (67)
where fij represents the frequency of arrival of the ith state543
from the jth state. The total number of arrival to the ith state544
from any other state is the sum of the ith row, i.e.,545
fi =4∑
j=1
fij , i = 1, 2, 3, 4. (68)
Matrix F is then converted to a state transition matrix P that is546
defined as547
P =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
f11 f12 f13 f14
f1 f1 f1 f1
f21 f22 f23 f24
f2 f2 f2 f2
f31 f32 f33 f34
f3 f3 f3 f3
f41 f42 f43 f44
f4 f4 f4 f4
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
. (69)
The elements pij of matrix P represent the probability548
of the state transition to the ith state from the jth state549
(i, j {1, 2, 3, 4}). The matrix P satisfies the properties of the550
state transition matrix of a Markov chain, i.e.,551
pij ≥ 0, i = 1, 2, 3, 4 (70)∞∑
j=0
pij = 1, i = 1, 2, 3, 4. (71)
Using state transition matrix P and a vector p(0) that defines552
the initial fault probability of four cylinders, the fault probabil-553
ity after n transitions is predicted as554
p(n) = p(0)P (n). (72)
Assuming that all cylinders are equally probable for having a555
fault, the initial fault probability vector is defined as p(0) =556
[0.25 0.25 0.25 0.25]. Using eigenvalue decomposition (EVD)AQ11 557
of matrix P , the aforementioned expression can be written as558
p(n) = p(0)V D(n)V −1 (73)
where V is a matrix of eigenvectors and D is a diagonal matrix,559
with the eigenvalues of the state transition matrix on diagonal.560
The limiting state probability would be calculated under the561
limit n → ∞. Since matrix D is diagonal, the calculation of562
the arbitrary power of the matrix is simply a computation of563
the scalar power. When the algorithm converges in the faulty564
state, the probability of the occurrence of the faulty state is565
the highest, and also, the faulty state would jump to itself with566
highest frequency so that the diagonal element as well as the567
column and row sums corresponding to the faulty state in matrix568
F would be the largest. This heuristic result is also supported569
Fig. 2. Flowchart of the fault detection method.
by the experimental results given in the next section. This 570
fact is used for the development of the very simple software 571
approaches in detecting fault. A flowchart defining the basic 572
implementation philosophy of the algorithm is shown in Fig. 2. 573
The flowchart contains four identical branches (one for each 574
subsystems). The branch corresponding to the third subsystem 575
is skipped due to the constraint of space. The activation of each 576
subsystem is defined by the ignition signals (Igniter1, Igniter2, 577
Igniter3, and Igniter4) that would be latched once it occurs. An 578
estimate of the crankshaft speed is obtained by generating a 579
clock of fixed frequency in FPGA and by counting the number 580
of clock pulses observed as the crankshaft traverse angular 581
displacement between two successive teeth. 582
Assuming equidistant teeth, the smallest value of the counter 583
corresponds to the peak speed. The peaks of all four subsystems 584
are recorded in terms of the counts in four variables (Counter1, 585
Counter2, Counter3, and Counter4). The state of the Markov 586
chain would be calculated using values in four counters, and 587

IEEE
Proo
f
RIZVI et al.: HYBRID MODEL OF THE GASOLINE ENGINE FOR MISFIRE DETECTION 9
matrix F is modified. The fault would be identified by testing588
the sum of the columns of matrix F .589
V. COMPARISON OF THE METHODS590
The memory requirements and the number of computations591
during one complete ignition cycle can be taken as the criteria592
in comparing the algorithms. The comparison of the algorithm593
is made with the algorithm based on the cross-correlation of594
the observed signal xi and the signal with known faults xj595
[22]. Consider a vector with N samples in a complete ignition596
cycle. The cross-correlation coefficient of the data vector with597
a known fault vector is given by598
Sij =∑N
n=1 [(xi(n) − xi) (xj(n) − xj)]σiσj
.
A. Memory Comparison599
The method that is based on the cross-correlation needs N600
memory locations for the data and N memory location for601
each sample of the known fault. If N = 24, then 48 memory602
locations would be needed to detect any particular single fault603
under test. The proposed method needs only 25 memory lo-604
cations: a system counter, four counters of subsystems, four605
igniter signals, and 16 elements of the state transition matrix.606
The method can detect all possible single-fault cases.607
B. Number of Computations608
The method that is based on correlation will first calculate609
the velocity vector. The average and standard deviations of610
the velocity vectors are computed. The correlation coefficient611
would then be found by N multiplications, N additions, and a612
division for each fault. The proposed method needs only N + 8613
comparisons and 12 additions to identify all faults.614
If the signal of the multiple ignition cycle is tested, the615
memory requirement and the number of computations of the616
algorithm based on the correlation analysis would increase, but617
the memory requirements of the proposed method remain same.618
The methods that are based on model-based fault detection and619
wavelet-based techniques need floating point calculations, and620
they are computationally more expensive.621
The implementation philosophy and the flowchart of the622
proposed algorithm indicate the simplicity of the proposed fault623
diagnosis algorithm without floating point calculations, and its624
implementation on FPGA needs a short development time.625
VI. SIMULATION AND EXPERIMENTAL RESULTS626
A. Model Simulation627
The proposed model was simulated in Simulink using the628
parameter values indicated in Table I. The block diagram used629
for the simulation is shown in Fig. 3, where G(s) represents630
the subsystem and Hi represents its health that scales the631
subsystem input. For the simulation, a periodic impulse train632
with a period of T was given to the system. The phase delay of633
the pulses to second, third, and fourth subsystems was chosen634
TABLE IPARAMETER VALUES USED IN THE SIMULATION
Fig. 3. Simulation block diagram.
Fig. 4. Simulation results. The waveforms representing (left) the fully bal-anced engine operation and (right) the operation with one cylinder misfiring. AQ12
as T/4, T/2, and 3T/4, respectively, to ensure the sequential 635
ignition of the subsystems. 636
The output of the subsystems was added to produce the net 637
system output for a steady-state velocity of 100 rad/s or 15.9 r/s. 638
To simulate the misfire event, the Hi of the faulty subsystem 639
was set to zero. The simulation results shown in Fig. 4 indicate 640
the time response of the crankshaft speed. Fig. 4 clearly shows 641
the speed fluctuations between different strokes of the engine 642
for the healthy and single-misfire fault conditions. 643
B. Experimental Model Validation 644
The engine speed response was experimentally measured by 645
installing a data acquisition card with the crankshaft position 646
sensor on a production vehicle from Honda with a gasoline 647
direct injection engine. The gear facing the crankshaft position 648
sensor contains 13 teeth, with a 30◦ spacing between 12 con- 649
secutive teeth and a 15◦ space between three consecutive teeth. 650
The extra tooth served as a reference in identifying the cylinder. 651
The instantaneous crankshaft speed was calculated using the 652

IEEE
Proo
f
10 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 58, NO. 8, AUGUST 2011
Fig. 5. Experimental results. The waveforms representing (left) the fullybalanced engine operation and (right) the operation with one cylinder misfiring.AQ13
angular spacing between consecutive teeth and the time taken653
between two consecutive pulses. The data were acquired at654
an engine speed of approximately 1000 r/min by pressing the655
accelerator, and the load was provided to the engine by applying656
brakes. The manual control of the accelerator and the brake also657
caused some experimental error. The observed engine speed658
response is shown in Fig. 5. Under the no misfire condition, the659
instantaneous crankshaft velocity slightly fluctuates at approxi-660
mately 15.9 r/s. When a misfire is introduced in the engine, the661
velocity about which the fluctuation is observed is reduced to662
12.7 r/s.663
The comparisons of the experimental and simulation results664
shown in Figs. 4 and 5 indicate the following features.665
1) Under the no fault condition, the speed fluctuation is666
nearly 0.4 r/s in both the simulation and experimental667
results.668
2) Under the fault condition, the speed fluctuation is in-669
creased to nearly 1.6 r/s in both results.670
3) The average speed and the basic trend of the speed671
fluctuations in both experimental and simulation data are672
the same under both the faulty and no fault conditions.673
4) The experimental results also exhibit a random674
component.675
The similarity of the experimental and simulation results676
provides grounds for model validation and associated statistical677
analysis.678
To indicate the output of each subsystem, a 3-D plot is shown679
in Fig. 6, with the cylinder number along the y-axis, the power680
stroke along the x-axis, and the crankshaft speed along the681
z-axis. During a power stroke, the velocity is measured at six682
points, so the resolution of the plot is one-sixth of the power683
stroke. The outputs of subsystems can be observed in the plot684
along two edges that are parallel to the axis of the ignition cycle685
and on two slightly visible lines in between. A surface is created686
by joining the corresponding points on the cylinder axis. The687
mean elevation of the surface along the z-axis represents the688
crankshaft speed. The zoomed view of the surface shown in689
Fig. 6 shows the ripples in the surface. These ripples indicate690
the power variations in an ignition cycle. A complete ripple strip691
from cylinders 1 to 4 represents a complete ignition cycle.692
C. Misfire Detection Algorithm Simulation693
The misfire detection algorithm was simulated by generating694
the data using the hybrid model [24]. Random velocity fluc-695
Fig. 6. Experimental results. The surface representing (top) the cylinder 3misfiring and (middle) the no misfire portion of the zoomed edge of the middlefigure along (bottom) the ignition stroke axis. AQ14
tuations were introduced in the output data of the system by 696
adding noise to the data. The data sets with no fault, single 697
cylinder misfire fault, and double-misfire fault were generated. 698
The simulated data were processed using the proposed algo- 699
rithm, and the results are provided in Table II. The results 700
indicate that, under the no fault condition, the probability of the 701
fault remains almost the same for all cylinders, but under the 702
misfire conditions, the probability of the fault for the misfiring 703

IEEE
Proo
f
RIZVI et al.: HYBRID MODEL OF THE GASOLINE ENGINE FOR MISFIRE DETECTION 11
TABLE IISIMULATION RESULTS OF THE MISFIRE DETECTION ALGORITHM
cylinder becomes larger. Under the double-misfire condition,704
the probability increases for both misfiring cylinders.705
D. Misfire Experiment (The Third Spark Plug Is Removed)706
The pulses from the crankshaft speed sensor were received,707
and the crankshaft speed was calculated. The calculated speed708
was demultiplexed into four streams associated with each sub-709
systems using the igniter signal. The data of 46 ignition cycles,710
with the fault introduced in cylinder 3, were analyzed. The711
calculated matrix F is shown in the following:712
F =
⎡⎢⎣
0 0 0 00 0 0 00 0 35 10 0 1 9
⎤⎥⎦ . (74)
MATLAB could not perform the EVD of matrix F , so one extra713
transition is provided to all possible state transitions, i.e., F is714
initially taken as a matrix with all ones rather than as a null715
matrix. The resulting matrix F is shown in the following:716
F =
⎡⎢⎣
1 1 1 11 1 1 11 1 36 21 1 2 10
⎤⎥⎦ . (75)
The calculated value of the limiting state probability is717
P (∞) = [0.0645 0.0645 0.6452 0.2258]. (76)
The limiting probability indicated the highest probability of the718
fault in the third cylinder, which correctly indicated the fault.719
E. No Misfire Experiment 1 (All Spark Plugs Are Present)720
Under the no misfire condition, the data of 592 ignition721
cycles were analyzed. The resulting matrix F is722
F =
⎡⎢⎣
294 10 6 311 76 9 55 12 105 42 4 6 40
⎤⎥⎦ . (77)
If, initially, all of the cylinders are faulty with equal probability723
P (0) = [0.25 0.25 0.25 0.25]. (78)
The limiting state probability was estimated to be724
P (∞) = [0.5167 0.1777 0.2163 0.0893]. (79)
A misfire condition in cylinder 1 is detected even when no725
misfire is intentionally introduced in the system. To explore726
the result, another experiment was conducted to study the air727
TABLE IIILEAKAGE IN THE CYLINDERS
Fig. 7. Limiting probability convergence in the balanced engine.
leakage from the cylinders. In this experiment, all of the four 728
spark plugs were removed, and a pressure gauge was installed 729
in their position. The gauges were set to retain the peak value 730
of the observed air pressure. The pistons were moved by using 731
the starter motor. The maximum pressure was created in the 732
cylinders during the compression stroke and was retained by the 733
pressure gauge. The observed values of the cylinder pressure 734
are given in Table III. The results of this experiment indicate a 735
slight pressure loss (misfire) due to the air leakage in the first 736
cylinder. The result is promising as the fault is detected when 737
no perceptible symptoms of the fault were present in the engine 738
operation. The ECU was also not telling any fault. 739
F. No Misfire Experiment 2 (Balanced Engine) 740
An experiment was conducted on the engine, with the cylin- 741
ders in the maximally balanced conditions, and the limiting 742
probabilities are plotted after each ignition cycle to establish the 743
convergence rate of the algorithm. The plot is shown in Fig. 7, 744
with the probability of the misfire in each cylinder between 0.2 745
and 0.33. These results are fairly consistent with the simulation 746
results of the no fault condition given in Table II. 747
The experimental results of the hybrid model (Fig. 6) also 748
provide some insight in the fault diagnostic method. 749
1) The residual vector corresponds to the maximum down- 750
slope of the surface observed from one cylinder to the 751
next cylinder during an ignition cycle [refer to Fig. 6 752
(top)]. 753
2) The cylinder number where the maximum slope of the 754
surface is observed represents the state of the Markov 755
chain. 756
3) Under the no fault condition, the surface of the 3-D plot 757
of the hybrid model shown in Fig. 6 (middle) is fairly 758
smooth. The surface, however, lost its smoothness when 759
the misfire fault occurs, as shown in Fig. 6 (top). 760
To establish the accuracy of the prediction of the proposed 761
algorithm, the ROC analysis was performed. 762

IEEE
Proo
f
12 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 58, NO. 8, AUGUST 2011
Fig. 8. ROC analysis of the fault detection algorithm.
VII. ROC ANALYSIS763
The objective of the ROC analysis is to study the accuracy764
of the algorithm as a function of n in (72). The analysis is765
performed for n = 0, n = 2, and n = 10. When n = 0, the state766
transition matrix is bypassed, and the fault decision is made767
purely on the basis of the observed residual. The proposed al-768
gorithm is essentially bypassed. When n = 2, a two-state ahead769
prediction is made, which is based on the past data, arranged as770
the state transition matrix. The affects of the algorithm would771
appear to some extent in the results. For n = 10, the results772
would be a closer approximation to the proposed algorithm,773
where n should be very large.774
For the ROC analysis, a binary classification {f3, nf} was775
assumed, where f3 represents a condition where the fault is776
present in the third cylinder and nf represents a condition777
where the fault is not present in the third cylinder. The lim-778
iting probability vector was calculated by the analysis of the779
experimental data of 50 ignition cycles, with the fault in the780
third cylinder. The estimated limiting probability vector was781
used to generate a predicted data set in each ignition cycle.782
These predicted data were used as a predicted instance and were783
classified to set {f3, nf}. The threshold for the classification784
was selected on the basis of the probability of the fault in the785
third cylinder, defined by the limiting probability vector. The786
predicted data set was then compared with the original data787
to identify the true positive events. The experiment was then788
repeated with the data from a maximally balanced cylinder789
with no misfire, and the false positive events were observed.790
Using the data of the true and false positive events, a confusion791
matrix was generated [28], and the data points were plotted on792
the ROC curve. Ten predicted data instances were generated,793
corresponding to each value of n, and were plotted on the ROC794
curve shown in Fig. 8. A convex hull and a chance line (major795
diagonal) were also plotted on the curve for analysis.796
Fig. 8 shows that all points corresponding to n = 0 are close797
to the chance line and are continuously crossing it, indicating798
a state of confusion. For n = 2, the cluster of points is shifted799
to the northwest side of the plot, indicating a better accuracy800
even with a rough approximation of the diagnosis algorithm.801
For n = 10, which is a better approximation of the proposed802
algorithm, the cluster of points is shifted further toward the803
northwest side and close to the convex hull, indicating even a804
better accuracy. This indicates that the residual analysis using 805
the limiting probability of the Markov chains results in a better 806
detection accuracy, with a small false alarm rate. 807
VIII. CONCLUSION 808
A hybrid switched linear model of the IC engine has been 809
proposed. This model is also extended for the analysis of 810
the probabilistic input variations. A fault diagnosis algorithm 811
that is based on the proposed model has also been presented. 812
The effectiveness of the hybrid model is established using 813
the simulation and experimental results. The effectiveness of 814
the proposed fault diagnosis algorithm is established using the 815
experimental results and the ROC analysis. It is also established 816
that the proposed algorithm is capable of detecting the incipient 817
faults to generate early fault warnings. The extension of the 818
proposed technique for the detection of multiple misfire, for 819
the misfire detection at low data rates that are compatible 820
to the ECU scan rate, and for the hardware development for 821
the proposed method is an area of future research for the 822
authors. 823
ACKNOWLEDGMENT 824
The authors would like to thank the research fellows of the 825
Control and Signal Processing Research Group, Mohammad 826
Ali Jinnah University, and the Center for Advanced Studies in 827
Engineering, Islamabad, Pakistan. 828
REFERENCES 829
[1] Y. L. Murphey, J. A. Crossman, Z. H. Chen, and J. Cardillo, “Automotive 830fault diagnosis—Part II: A distributed agent diagnostic system,” IEEE 831Trans. Veh. Technol., vol. 52, no. 4, pp. 1076–1098, Jul. 2003. 832
[2] J. A. Crossman, H. Guo, Y. L. Murphy, and J. Cardillo, “Automotive 833signal fault diagnostics—Part I: Signal fault analysis, signal segmentation, 834feature extraction and quasi-optimal feature selection,” IEEE Trans. Veh. 835Technol., vol. 52, no. 4, pp. 1063–1075, Jul. 2003. 836
[3] J. Luo, M. Namburu, and K. R. Pattipati, “Integrated model-based and 837data-driven diagnosis of automotive antilock braking system,” IEEE 838Trans. Syst., Man, Cybern. A, Syst., Humans, vol. 40, no. 2, pp. 321–336, 839Mar. 2010. 840
[4] M. Lee, M. Yoon, M. Sunwoo, S. Park, and K. Lee, “Development of 841a new misfire detection system using neural network,” Int. J. Automot. 842Technol., vol. 7, no. 5, pp. 637–644, 2006. 843
[5] J. Luo, K. R. Pattipati, L. Qiao, and S. Chigusa, “An integrated diagnos- 844tic development process for automotive engine control systems,” IEEE 845Trans. Syst., Man, Cybern. C, Appl. Rev., vol. 37, no. 6, pp. 1163–1173, 846Nov. 2007. 847
[6] Q. R. Butt and A. I. Bhatti, “Estimation of gasoline engine parameters 848using higher order sliding mode,” IEEE Trans. Ind. Electron., vol. 55, 849no. 11, pp. 3891–3898, Nov. 2008. 850
[7] E. Hendrick and S. C. Sorenson, “Mean value modeling of spark ignition 851engines,” presented at the Int. Congr. Expo., Detroit, MI, 1990, SAE 852Technical Paper 900616. 853
[8] A. Balluchi, L. Benvenuti, M. D. Di Benedetto, C. Pinello, and 854A. L. Sangiovanni-Vincentelli, “Automotive engine control and hybrid 855systems: Challenges and opportunities,” Proc. IEEE, vol. 88, no. 7, 856pp. 888–912, Jul. 2000. 857
[9] A. K. Sood, A. A. Fahs, and N. A. Henein, “Engine fault analysis: 858Part II—Parameter estimation approach,” IEEE Trans. Ind. Electron., 859vol. IE-32, no. 4, pp. 301–307, Nov. 1985. 860
[10] F. D. Torrisi and A. Bemporad, “HYSDEL—A tool for generating compu- 861tational hybrid models for analysis and synthesis problems,” IEEE Trans. 862Control Syst. Technol., vol. 12, no. 2, pp. 235–249, Mar. 2004. 863
[11] N. Giorgetti, G. Ripaccioli, and A. Bemporad, “Hybrid model predictive 864control of direct injection stratified charge engines,” IEEE/ASME Trans. 865Mechatronics, vol. 2, no. 5, pp. 499–506, Oct. 2006. 866

IEEE
Proo
f
RIZVI et al.: HYBRID MODEL OF THE GASOLINE ENGINE FOR MISFIRE DETECTION 13
[12] M. Iqbal, A. I. Bhatti, S. Iqbal, and Q. Khan, “Robust parameter esti-867mation of nonlinear systems using sliding mode differentiator observer,”868IEEE Trans. Ind. Electron., Feb. 2010, to be published.AQ15 869
[13] A. I. Bhatti, J. A. Twiddle, S. K. Spurgeon, and N. B. Jones, “Engine870coolant system fault diagnostics with sliding mode observers and fuzzy871analyser,” in Proc. IASTED Conf. Model., Identif. Control, Innsbruck,872Austria, 1999.873
[14] M. Nyberg and A. Perkovic, “Model based diagnosis of leaks in the air-874intake system of an SI-engine,” presented at the Int. Congr. Expo., Detroit,875MI, 1998, SAE Paper 980514.876
[15] R. Isermann, “Model based fault detection and diagnosis—Status and877applications,” Annu. Rev. Control, vol. 29, no. 1, pp. 71–85, 2005.878
[16] G. Biswas, M. O. Cardier, J. Lunze, L. T. Massuyes, and M. Staroswiecki,879“Diagnosis of complex systems: Bridging the methodologies of FDI and880DX communities,” IEEE Trans. Syst., Man, Cybern. B, Cybern., vol. 34,881no. 5, pp. 2159–2162, Oct. 2004.882
[17] L. A. Feldkamp, T. M. Feldkamp, and D. V. Prokhorov, “Adaptive classi-883fication,” in Proc. IEEE AS-SPCC, 2000, pp. 52–57.884
[18] M. Montini and N. Speciale, “Multiple misfire identification by a wavelet-885based analysis of crankshaft speed fluctuation,” in Proc. IEEE Int. Symp.886Signal Process. Inf. Technol., Aug. 2006, pp. 144–148.887
[19] G. Rizzoni, J. G. Pipe, R. N. Riggin, and M. P. VanOyen, “Fault isolation888and analysis for IC engine onboard diagnostics,” in Proc. 38th IEEE Veh.889Technol. Conf., Philadelphia, PA, 1988, pp. 237–244.890
[20] I. Morgan and H. Liu, “Predicting future states with n-dimensional891Markov chains for fault diagnosis,” IEEE Trans. Ind. Electron., vol. 56,892no. 5, pp. 1774–1781, May 2009.893
[21] J. Merkisz, P. Bogus, and R. Grzeszczyk, “Overview of engine misfire894detection methods used in on board diagnostics,” J. KONES Combust.895Engines, vol. 8, no. 1/2, pp. 326–341, 2001.896
[22] A. K. Sood, C. B. Friedlander, and A. A. Fahs, “Engine fault analysis:897Part I—Statistical methods,” IEEE Trans. Ind. Electron., vol. IE-32, no. 4,898pp. 294–300, Nov. 1985.899
[23] M. A. Rizvi, A. I. Bhatti, and Q. R. Butt, “Misfire detection in IC en-900gines using finite state automata,” in Proc. 15th Int. Conf. Soft Comput.901MENDEL, Brno, Czech Republic, Jun. 24–26, 2009, pp. 93–100.902
[24] M. A. Rizvi and A. I. Bhatti, “Hybrid model for early detection of misfire903fault in SI engines,” in Proc. IEEE 13th Int. Multitopic Conf., Nov. 2009,904pp. 1–6.905
[25] M. A. Rizvi, A. I. Bhatti, and Q. R. Butt, “Fault detection in a class of906hybrid system,” in Proc. ICET , Oct. 2009, pp. 130–135.907
[26] J. L. Speyer and W. H. Chung, Stochastic Processes, Estimation and908Control., 1st ed. Philadelphia, PA: SIAM, 2008, pp. 157–159.909
[27] P. K. Wong, L. M. Tam, K. Li, and C. M. Vong, “Engine idle speed910system modeling and control optimization using artificial intelligence,”911Proc. Inst. Mech. Eng. D, J. Automobile Eng., vol. 224, no. 1, pp. 55–72,912Jun. 2009.913
[28] T. Fawcett, “An introduction to ROC analysis,” Pattern Recognit. Lett.,914vol. 27, no. 8, pp. 861–874, Jun. 2006.915
[29] S. A. Arogeti, D. Wang, and C. B. Low, “Mode identification of hybrid916systems in the presence of fault,” IEEE Trans. Ind. Electron., vol. 57,917no. 4, pp. 1452–1467, Apr. 2010.918
Muddassar Abbas Rizvi received the B.S. de-919gree in electrical engineering from the University920College of Engineering, Taxila, Pakistan, in 1990921and the M.S. degree in systems engineering from922Quaid-e-Azam University, Islamabad, Pakistan. He923is currently working toward the Ph.D. degree at the924Mohammad Ali Jinnah University, Islamabad.925
He has an 18-year experience in electronic circuit926design and development. He has been working as a927Visiting Faculty Member with the National Univer-928sity of Science and Technology, Islamabad, for the929
last three years. He is the first author and coauthor of five conference papers. His930research interests include mathematical modeling, fault diagnostics, computer931programming, and electronic circuit designing.932
Aamer Iqbal Bhatti Sr. (SM’XX) received the AQ16933B.S. degree in electrical engineering from the AQ17934University of Engineering & Technology, Lahore, AQ18935Pakistan, in 1993, the M.S. degree in control systems AQ19936from the Imperial College of Science, Technology 937and Medicine, London, U.K., in 1994, and the Ph.D. 938degree in control engineering from the University of 939Leicester, Leicester, U.K., in 1998. 940
He worked on the idle speed control of the Ford 941Mondeo Engine for his Ph.D. research. He continued 942his stay at the University of Leicester for his post- 943
doctoral research on fault diagnostics and control of high-powered diesel 944engines, funded by Caterpillar. In 1999, he returned to Pakistan and started 945working for a consultancy firm (ERDC), providing services in the field of AQ20946aerospace controls, where he worked on nonlinear simulations of air vehicles, 947system identification, controller design for aerospace vehicles, and data acquisi- 948tion experiment design. He moved to Communications Enabling Technologies, 949Islamabad, Pakistan, in 2001, where he worked on the enhancements of the line 950echo cancellers used in VoIP. Later on, he cofounded the Center for Advanced 951Studies in Engineering (an engineering education institution) and CARE (an AQ21952R&D company). At CARE, he led a team that indigenously designed a radar 953signal processor and an ELINT system. In 2007, he joined the Mohammad Ali AQ22954Jinnah University, Islamabad, where he is currently a Professor of DSP and 955control systems with the Department of Electronic Engineering. He is the first 956author and coauthor of more than 35 refereed international papers, including 957four journal publications. His research interests are sliding mode applications 958and radar signal processing. 959
Qarab Raza Butt received the B.S. degree in me- AQ23960chanical engineering from the University College 961of Engineering, Taxila, Pakistan, in 1989, a post- 962graduate diploma in computer system software and 963hardware from the Computer Center, Islamabad, 964Pakistan, in 1990, and the M.S. degree in control AQ24965engineering from the Center for Advanced Studies 966in Engineering, Islamabad, in 2004, where he is 967currently working toward the Ph.D. degree. 968
Since 1990, he has been working in the industry 969as an Installation, Fabrication, and Design Engineer 970
for nearly 12 years. He is the first author and coauthor of more than 13 inter- 971national papers, including two journal publications. His research interests are 972mathematical modeling of dynamic systems for control and fault diagnostics. 973
IEEE
Proo
f
AUTHOR QUERIES
AUTHOR PLEASE ANSWER ALL QUERIES
AQ1 = Please verify the postal code provided.AQ2 = Please provide the expanded form of the acronym ‘MVEM.’AQ3 = Sentence was restructured to make it parallel. Please check if the thought is preserved.AQ4 = Please provide the expanded form of the acronym ‘NN.’AQ5 = The acronym ‘FPGA’ was defined as ‘field programmable gate array.’ Please check if appropriate.AQ6 = Please provide the expanded form of the acronym ‘LTI.’AQ7 = Sentence was restructured. Please check if the thought is preserved.AQ8 = Please provide the expanded form of the acronym ‘EFI.’AQ9 = Sentence was restructured. Please check if the thought is preserved.AQ10 = Sentence was restructured. Please check if the thought is preserved.AQ11 = Sentence was restructured. Please check if the thought is preserved.AQ12 = Fig. 4 caption was restructured. Please check if the thought is preserved.AQ13 = Fig. 5 caption was restructured. Please check if the thought is preserved.AQ14 = Fig. 6 caption was restructured. Please check if the thought is preserved.AQ15 = Please provide publication update in Ref. [12].AQ16 = Please provide membership history of author Aamer Iqbal Bhatti Sr.AQ17 = ‘Bachelor’s’ was captured as ‘B.S.’ Please check if appropriate.AQ18 = ‘UET’ was defined as ‘University of Engineering & Technology.’ Please check if appropriate.AQ19 = ‘Masters’ was captured as ‘M.S.’ Please check if appropriate.AQ20 = Please provide the expanded form of the acronym ‘ERDC.’AQ21 = Please provide the expanded form of the acronym ‘CARE.’AQ22 = Please provide the expanded form of the acronym ‘ELINT.’AQ23 = ‘Bachelor’s’ was captured as ‘B.S.’ Please check if appropriate.AQ24 = ‘Masters’ was captured as ‘M.S.’ Please check if appropriate.
END OF ALL QUERIES
Top Related
Copyright © 2022 FDOKUMEN

