







Bahasa
Halaman
Hukum


Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc Druck 12.09.16 15:58 Uhr © 2002/2016 Prof. Dr. Klepzig, Zwickau – Alle Rechte, insbesondere das Recht der Vervielfältigung u. Verbreitung sowie der Übersetzung, vorbehalten. Kein Teil des Skripts und der verknüpften Dateien darf in irgendeiner Form ohne den exakten Quellennachweis „Klepzig, W.: Aufbaukurs CATIA-FEM. Zwickau, Westsächsische Hochschule, Fakultät Automobil- u. Maschinenbau, Lehrmaterial, 2011. http://whz-cms-10.zw.fh-zwickau.de/wk/catia.htm“ verwendet werden.
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
CATIA V5 – FEM-Simulation (Elfini-Solver)
mit Verknüpfungen zu erforderlichen Dateien
Ergänztes Skript zum früheren CAD-Praktikum
„Aufbaukurs CATIA-FEM“
an der Westsächsischen Hochschule Zwickau
Letztes CATIA-FEM-Praktikum an der WHZ Wintersemester 2006.
Bearbeitungsstand mit einigen Ergänzungen 16.03.2016
Prof. Dr.-Ing. habil. Wolf Klepzig Fachgebiet: Werkzeugmaschinen
2006 emeritiert
Lehrgebiete: Umformende, zerteilende und abtragende Werkzeugmaschinen
und Werkzeuge sowie CAD/CATIA
0162-285 2668, 0375-785 262
E-Mail: [email protected]
www.wolf-klepzig.de

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 2 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Inhaltsverzeichnis Seite
Inhaltsverzeichnis 2
0 Abkürzungen 7
1 Vorbemerkung und Literaturhinweise 8
2 FEM-Module in CATIA V5 9
3 Generative Structural Analysis – prinzipielles Vorgehen 10
4 Prinzipielles Vorgehen am Beispiel des einseitig eingespannten Biegebalkens 12
4.1 Konventionelle analytische Berechnung 12
4.2 GSA starten und Randbedingungen definieren 13
4.3 Berechnen und Genauigkeit prüfen 16
4.4 Genauigkeit erhöhen 18
4.4.1 Kleinere globale Netzgröße 18
4.4.2 Kleinere lokale Netzgröße 19
4.4.3 Parabolische Netzelemente (Tetraeder mit Zwischenknoten, TE10) 20
4.4.4 Adaptive Vernetzung 21
4.4.5 Spannungsverteilung durch modifizierte Einspannbedingungen verbessern 22
4.4.5.1 Indirekte Einspannung über bewegliches virtuelles Teil 23
4.4.5.2 Erweiterte Randbedingungen 26
4.4.5.3 Einspannung nur eines schmalen Streifens um die neutrale Faser 27
4.4.5.4 Vergleich der modifizierten Einspannvarianten 29
5 Bedeutung der errechneten Spannung- und Verformungswerte 30
5.1 Spannungen 30
5.2 Festigkeitshypothesen und Vergleichsspannungen 30
5.3 Spannungsanzeigen in CATIA 31
5.4 CATIA-Benennungen und -Kurzzeichen: 31
5.5 Verschiebungen 32
6 Lagerungs-, Kopplungs- und Lastbedingungen 33
6.1 Allgemeines 33

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 3 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
6.2 Lagerungsrandbedingungen 33
6.3 Virtuelle Teile 35
6.4 Kopplung zwischen Bauteilen 36
6.4.1 Analyseverbindungen 37
6.4.2 Nahe Verbindungen 39
6.4.2.1 Arten und Eigenschaften naher Verbindungen 39
6.4.2.2 Schraubenverbindungen 40
6.4.3 Ferne Verbindungen 46
7 Lastbedingungen 48
8 Modellieren von Federn 51
9 Sensoren 53
10 Anwendungsbeispiel Hauptspindel 56
10.1 Vernetzung 56
10.2 Federnde Lagerungen 56
10.3 Analyseverbindungen definieren 57
10.4 Verbindungen definieren 57
10.5 Schnittkraftkomponenten und Tangentialkraft am Bodenrad 58
10.6 Sensoren und Ergebnisse 60
11 Parameteroptimierung mit der Knowledgeware Product Engineering Optimizer PEO 62
11.1 Voreinstellungen für PEO 62
11.2 Optimierungsalgorithmen 63
11.3 Beispielmodell Hauptspindel 64
11.3.1 Minimierung der Verformung in Richtung der Passivkraft 65
11.3.2 Minimierung der Verformung in Richtung der Passivkraft und in Richtung der Hauptschnittkraft als zweite Bedingung 68
12 Schadensanalyse Druckgehäuse 71
13 Schwingungsberechnungen 79
13.1 Berechnung der Eigenwerte (Frequenzprozess) 81
13.1.1 Erklärung am einfachen Beispiel Einmasselängsschwinger 81
13.1.2 Vergleich der mit den 3 Varianten der Eigenfrequenzberechnung berechneten

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 4 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Eigenwerte 85
13.2 Freie gedämpfte Schwingungen 88
13.2.1 Erregerfunktionen für Last- und Bedingungsanregung 88
13.2.1.1 Sprung-, Impuls- und andere Funktionen als Exceltabellen 89
13.2.1.2 Belastungs-Zeit-Funktion („Zeitmodulation“) 92
13.2.2 Berechnen des Ausschwingvorganges 93
13.2.2.1 Dämpfung festlegen 93
13.2.2.2 Zeiten für Start und Ende der Simulation 94
13.2.2.3 Schwingungsvorgang berechnen 94
13.2.3 Ergebnisdarstellung 94
13.2.4 Daten exportieren 97
13.2.5 Erregerfunktionen (Zeitmodulationen) des Modells modifizieren 97
13.3 Erzwungene gedämpfte Schwingungen 99
13.3.1 Erregerfunktion für Lastanregung 99
13.3.1.1 Funktionen als Exceltabellen 99
13.3.1.2 Belastungs-Frequenz-Funktion („Frequenzmodulation“) 100
13.3.2 Berechnen des Frequenzganges 101
13.3.2.1 Dämpfung festlegen 101
13.3.2.2 Frequenzbereich der Simulation 101
13.3.2.3 Schwingungsvorgang berechnen und darstellen 102
13.3.3 Ergebnis in Diagrammen darstellen 102
13.3.4 Durch Unwucht erzwungene Schwingungen 103
13.3.5 Kraft- und beschleunigungserregte gedämpfte Schwingungen eines Zweimassensystems 104
13.3.5.1 Unwucht- und Krafterregung 104
13.3.5.2 Beschleunigungsanregung 105
13.3.5.3 Daten nach Excel exportieren 106
13.4 Beispiel erzwungene gedämpfte Schwingungen Hauptspindel 107
14 Knicken von Stäben und Beulen dünnwandiger Bauteile 110
14.1 Knicken von Stäben 110

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 5 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
14.1.1 Koeffizienten für die Tetmajergleichung 113
14.1.2 Näherung für P oder dP 115
14.1.3 Berechnung der Knickspannung im elastisch-plastischen Bereich 116
14.1.4 Zulässige Knickspannung 117
14.2 Knickberechnung in CATIA 119
14.3 Beispielmodell Knickberechnung Pleuel 122
14.3.1 Minimalmodell 122
14.3.2 Ersatzstab zur Bewertung der Gültigkeit von CATIA berechneter Knicksicherheiten (Beulfaktoren) 126
14.3.3 Auswertung der Knickberechnung des Pleuels 130
14.4 Beulen von Platten 132
15 Ebene Tragwerke und Raumtragwerke 135
16 Anwendungen mit Advanced Meshing Tools 139
16.1 Befehle, Stand R14 bis R20 139
16.1.1 Netztypen auswählen 139
16.1.2 Vernetzen und Netzmodifikation 140
16.1.3 Netztransformationen und –operationen 141
16.1.4 Export und Import von Netzen 142
16.1.5 Analysewerkzeuge für Netze 142
16.1.6 Analyseverbindungen 144
16.1.7 Schweißverbindungen 144
16.2 Prinzipielles Vorgehen 145
16.3 Beispiele 153
16.3.1 2D-Netze für Blechformteil mit Löchern und Riss, Anschlussflächen mit Lücke und Überdeckung 153
16.3.2 Blechformteil mit 3D-Netzen durch Translation modellieren 157
16.3.3 Verbinden von 3D-Netzen 160
16.3.3.1 3D-Extrusionsnetze zum Lückenschluss zwischen benachbarten 3D-Translationsflächen 161
16.3.3.2 2D-Kopplungsnetze zum Lückenschluss zwischen benachbarten 3D-Translationsflächen 162

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 6 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
16.3.3.3 Vergleich der berechneten Verschiebungen und Spannungen des Blechformteils aus drei Volumina mit der GSA-TE10-Vernetzung 162
16.3.4 Gesamtvernetzung von Blechteilen als 3D-Translationen 164
16.3.5 Vergleich der Verformungen und Spannungen bei verschiedenen Modellierungsvarianten eines Rohr-Testmodells und des R17-Blechformteils 165
16.3.6 Beispiel Winkel 174
16.3.7 Beispiel Hagelschlag auf PKW-Dach 179
16.3.7.1 Vorbemerkungen 179
16.3.7.2 Elterngeometrie der Vernetzungsvarianten 180
16.3.7.3 GSA-OCTREE-Netze 181
16.3.7.4 AMT-2D-Netze 182
16.3.7.5 Bedingungen, Lasten, Verbindungen 183
16.3.7.6 Berechnung und lokale Sensoren 184
16.3.7.7 Auswertung der Ergebnisse 185
17 FEM-Elemente im Elfini Solver 187
18 Quellennachweis 194

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 7 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
0 Abkürzungen
AD Assembly Design
AMT Advanced Meshing Tools
GSA Generative Structural Analysis
GSD Generative Shape Design & Optimizer
LMT linke Maustaste
PD Part Design
PEO Product Engineering Optimizer
RMT rechte Maustaste

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 8 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
1 Vorbemerkung und Literaturhinweise
Grundlagen der FEM wurden an der WHZ bereits am Beispiel von ANSYS behandelt und sind
nicht Inhalt des Kompendiums.
Praktikum CATIA V5 – FEM-Simulation umfasst nur erste Schritte und ausgewählte Problem-
kreise als Basis für selbstständiges Einarbeiten anhand der Literatur. Die verfügbare Hardware
ermöglicht nur die Berechnung kleinster Modelle mit kurzen Berechnungszeiten, weil während
der Praktika längere Berechnungszeiten nicht abgewartet werden können.
Bei den Erläuterungen wird auf die CATIA-Hilfen zu R14 im pdf-Format (leider nur bis R17) hin-
gewiesen. Diese Quellen /1/ bis /3/ stehen aus urheberrechtlichen Gründen nur im Intranet der
WHZ zur Verfügung. Alternativ kann natürlich stets auch auf die html-Versionen zugegriffen wer-
den, z. B. …\B19doc\German\online\German\CATIA_P3_search.htm. In der Volltextsuche wird
das Produkt GSA bzw. PEO ausgewählt, dann der gleiche oder ein ähnlicher Suchbegriff einge-
geben, wie er für die estug.pdf-Suche im Skript angegeben ist.
Bild 1: Volltextsuche
Als Fachbücher zu CATIA-FEM sind Koehldorfer /4/ und Woyand /5/ zu empfehlen.
Koehldorfer /4/ beschreibt die Finite-Elemente-Methoden mit CATIA V5 umfassend einschließlich
der Modellierung von Baugruppen und Advanced Meshing Tools, aber Schwingungsberechnun-
gen sind nur unzureichend erklärt. Wegen des für Studenten relativ hohen Preises von 59,90 €
ist die Ausleihe in der Hochschulbibliothek zu empfehlen.
Woyand /5/ ist mit 32 € studentenfreundlicher. Die Berechnung freier und erzwungener gedämpf-
ter Schwingungen ist wesentlich besser erklärt als bei Koehldorfer, mit dessen kurzen Anmer-
kungen Einsteiger kaum eine Schwingungsberechnung durchführen können. Die Berechnung
von Baugruppen ist zu knapp abgehandelt, der Umgang mit Advanced Meshing Tools wird nur
kurz beschrieben.
Viele Hinweise und auch Nachfragemöglichkeiten gibt es im CATIA V5-FEM-Forum
http://ww3.cad.de/cgi-
bin/ubb/forumdisplay.cgi?action=topics&forum=CATIA+V5+FEM&number=395&DaysPrune=100
0&LastLogin=&mystyle=
Bei den verlinkten Modellen handelt es sich meist um R14-Modelle. Ausnahmen sind:
Abschnitt 11 teilweise R17-Modelle,
Abschnitt 12 Schadensanalyse Druckgehäuse R17-Modelle,

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 9 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Abschnitt 15 Tragwerke R17-Modelle,
Abschnitt 16.3.7 R17-Modelle,
2015/2016 ergänzte bzw. modifizierte Modelle R19.
Das Lehrmaterial wird noch von relativ vielen Studenten zum selbstständigen Einarbeiten in
CATIA-FEM genutzt. Weil das Skript wegen meiner Erklärungen während der Praktika relativ
knapp gefasst war, seit 2007 diese Praktika aber nicht mehr angeboten werden, sah ich mich
nun doch zur Ergänzung des Skripts um zusätzliche Erläuterungen veranlasst.
2 FEM-Module in CATIA V5
Der Elfini-Solver ist nur für lineares elastisches Werkstoffverhalten geeignet, also bis zur
Proportionalitätsgrenze. Für anspruchsvollere FEM-Simulationen einschließlich nichtlinearer
Modelle das in CATIA-SIMULIA integrierte Abaqus oder ANSYS nutzen.
Arbeitsumgebungen mit Elfini-Solver:
Generative Structural Analysis (GSA als Skript -Abkürzung),
Advanced Meshing Tools (AMT als Skript-Abkürzung).
B19doc\German\online\German\CATIAfr_C2\estugCATIAfrs.htm zur Benutzerumgebung Gene-
rative Structural Analysis, gekürzt und modifiziert:
Die Umgebung umfasst die folgenden Produkte:
Generative Part Structural Analysis (GPS) wurde für Benutzer konzipiert,
die nur gelegentlich damit arbeiten.
ELFINI Structural Analysis (EST) ist eine Erweiterung. Es bildet die Basis aller zu-künftigen Entwicklungen zur mechanischen Analyse.
Generative Assembly Structural Analysis (GAS) ermöglicht die Untersuchung des mechanischen Verhaltens der gesamten Baugruppe.
Generative Dynamic Analysis (GDY) zur Berechnung freier und erzwungener ge-dämpfter Schwingungen.
\B19doc\German\online\German\CATIAfr_C2\fmsugCATIAfrs.htm zu Advanced Meshing Tools:
Advanced Meshing Tools in a Nutshell
Advanced Meshing Tools allows you to rapidly generate a finite element model for complex
parts whether they are surface or solid. In other words, you will generate associative mesh-ing from complex parts, with advanced control on mesh specifications. The Advanced Meshing Tools workbench is composed of the following products:
FEM Surface (FMS): to generate a finite element model for complex surface parts.
FEM Solid (FMD): to generate a finite element model for complex solid parts.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 10 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
3 Generative Structural Analysis – prinzipielles Vorge-hen
Festkörpergeometrie für FEM-Berechnung muss sich generell im Hauptkörper befinden!
Im Part Design kann jeder Körper zum Hauptkörper gemacht werden. Wenn z. B. eine zu be-
rechnende Baugruppe auch Teile enthält, die zunächst nicht mit berechnet werden sollen,
dann in die jeweiligen Teile einen neuen Körper.x einfügen und mit RMT-Klick auf neuen
Körper.x > Objekt Körper > Hauptkörper ändern [Body.x object > Change Part Body] (Bild 2).
Wenn dieser neue Hauptkörper [Part Body] keine Geometrie enthält, wird er im GSA auch
nicht verarbeitet. Es kommt ein entsprechender Warnhinweis.
Bild 2: Hauptkörper ändern
Material zweckmäßig schon im PD für Körper bzw. im GSD für Flächen zuweisen.
Baugruppenbedingungen im AD erzeugen oder besser im GSA (kein Überbestimmen wie im
AD).
Schrittfolge:
1. In der Bauteilumgebung ggf. Geometrie vereinfachen, z. B. kleine Radien und Bohrungen
entfernen, wenn diese für die kritischen Spannungen nicht relevant sind.
2. Vernetzen, erfolgt automatisch für Bauteile beim Start von GSA, allerdings nur für den
Hauptkörper. Ggf. Netzmodifikation vornehmen.
3. Material zuweisen, wenn nicht bereits in der Bauteilumgebung erfolgt.
4. Randbedingungen und Belastungen definieren (Lagerung, Lasteinleitung, Kopplung zwi-
schen Bauteilen einer Baugruppe).
5. Berechnung
Zweckmäßig zunächst nur Vernetzung, ggf. Netz modifizieren.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 11 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Anschließend Kontrollberechnung der Lösung des Analyseprozesses mit zunächst linea-
ren Tetraederelementen, um die Vollständigkeit der Randbedingungen zu überprüfen
(keine Singularität).
Endgültige Berechnung mit parabolischen Tetraederelementen > Spannungen und Ver-
formungen.
6. Überprüfen der Genauigkeit (objektiver Berechnungsfehler)
„Globaler Sensor“ für Genauigkeit (prozentualer Fehler).
Ggf. Genauigkeit erhöhen.
7. Darstellung der Berechnungsergebnisse
Definition von „Sensoren“ für Genauigkeit (prozentualer Fehler), Lagerkräfte/-momente,
Spannungen und Verformungen.
Anzeige des verformten Netzes, der Spannungen und Verformungen (Skalierung der Dar-
stellung, Animation).
Analysetools (Schnittebenen, Grafikdarstellung, Extremwerte, Layout).
8. Wenn möglich, Vergleich der FEM-Ergebnisse mit Ergebnissen der konventionellen analyti-
schen Berechnung. Auf jeden Fall sind die Ergebnisse nicht kritiklos zu übernehmen, son-
dern mit dem Ingenieurwissen abzugleichen.
9. Ausgabe der Berechnungsergebnisse und Analyseberichte

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 12 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
4 Prinzipielles Vorgehen am Beispiel des einseitig ein-gespannten Biegebalkens
Ziel ist es, an diesem einfachen Beispiel den Einfluss der Lagerungsbedingungen und der Ver-
netzung aufzuzeigen. Der Nutzer muss sich auch bei komplexeren Modellen dieser Zusammen-
hänge stets bewusst sein.
4.1 Konventionelle analytische Berechnung
Bild 3: Einseitig eingespannter Balken
Querkontraktionszahl Q
= 0,266 für Stahl.
Gleit- oder Schubmodul G Q12
EG
. (1)
Schubverteilungszahl bei Querkraftschub
= 6/5 für Rechteckquerschnitt,
= 10/9 für Kreisquerschnitt.
Elastizitätsmodul E
E = 2,1 105 N/mm² für Stahl (CATIA-Wert Stahl 2 105 N/mm²!).
Verschiebung am Kraftangriff v,
Durchbiegung am Kraftangriff f,
Schubverformung am Kraftangriff vS
v = f + vS, (2)
3
33
hbE3
F12
E3
Ff
, (3)
Ghb
FvS
, (4)

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 13 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
hbhb3
12
E
F
Ghb
F
E3
Fv
3
23 , (5)
b
bb
W
M , (6)
2chteckReb
hb
F6 . (7)
Schubspannung infolge Biegequerkraft
Maximum in der neutralen Faser, Null an Rändern in Querkraftrichtung, deshalb meist ver-
nachlässigt.
Nach genauerer Theorie /8/ ist senkrecht zur Querkraftrichtung nicht konstant, sondern am
Rand am größten – vernachlässigen.
Maximale Schubspannung max errechnet sich aus der mittleren Schubspannung m
hb
Fm , (8)
hb
FCSmax , (9)
mit CS = 1,5 für Rechteck-, CS = 4/3 für Kreis- und CS 2 für Kreisringquerschnitt.
Für Rechteckquerschnitt wird
hb2
F3max . (10)
Berechnung für Balkenvarianten in der Konstruktionstabelle
sonstVkn\Konstrtab_Biegebalken-einsEinspanng.xls
Für den Balken mit den Abmessungen b x h x l = 100 x 100 x 1000 und einer Querkraft von 1 kN
errechnen sich bmax = 6 MPa, max = 0,15 MPa, Verschiebung vorn v = 0,192 mm.
4.2 GSA starten und Randbedingungen definieren
Bauteil- oder Baugruppenmodell öffnen, z. B.
Balken2_Konsttab_inakt_integr_Teilflaeche.CATPart.
Kopfleiste Start > Analyse & Simulation > Generative Structural Analysis (GSA) > Statikana-
lyse [Static Analysis].

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 14 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Umgebung GSA anpassen: Kopfleiste Tools > Optionen > [Tools > Options].
Allgemein > Parameter und Messungen > Register Einheiten [General > Parameters and
Measure > Units]:
Druck im MPa,
Winkelsteifigkeit in Nm/rad (Nxm_rad),
Versteifungskonstante N/mm (N_mm).
Allgemein > Parameter und Messungen > Register Ratgeber [General > Parameters and
Measure > Knowledge]:
Strukturbaumansicht – Parameter Mit Wert [Parameter Tree View With value].
Analyse und Simulation > Register Allgemein [Analysis & Simulation > General]:
keinen Standardanalyseprozess definieren [ Define a default starting analysis case] ,
Parameter anzeigen [Show parameters] ,
Beziehungen anzeigen [Show relations].
Symbolleisten
Für die beschriebene Einarbeitung in GSA sollten folgende Symbolleisten eingeblendet und
so auf dem Bildschirm angeordnet werden, dass alle sichtbar sind.
Bild 4: Einblenden der GSA-Symbolleisten

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 15 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Umgebung GSA starten > Statikanalyse es wird automatisch mit Tetraederelementen ver-
netzt, linear oder parabolisch gem. vorausgegangener letzter Vernetzung.
> Doppelklick auf OCTREE-Tetraedernetz [Tetrahedron Mesh] im Baum Bild 5
Bild 5: Automatische Vernetzung
Zunächst Elementtyp Linear und von CATIA vorgeschlagene Werte belassen.
Feste Einspannung für Balkenstirnfläche .
Last auf gegenüberliegende Stirnfläche, z. B. Flächenlast .
Nur zum Üben der Formelfunktion, weil hier eigentlich un-
geeignet!
Größe der Flächenlast mittels Formel aus Parametern
Querkraft, Balkenbreite und Balkenhöhe (Bild 6), dazu
RMT-Klick in das Eingabefeld Y der Flächenlast > Formel
bearbeiten > Formeleditor wird geöffnet, Parameter im
Baum selektieren.
Bild 6: Berechnung der Flächenlast zum Üben des Umgangs mit Formeln
Eintrag der Last im Baum (Bild 7).
Einfacher ist Dichte der Kraft [Force Density] (Tabelle 10).

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 16 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 7: Flächenlast
4.3 Berechnen und Genauigkeit prüfen
RMT auf Baumzweig Knoten und Elemente > Netzdarstellung [Mesh Visualization] nicht
verformtes Netz.
Berechnen , bei dem einfachen Modell gleich „Alle“.
RMT auf Sensoren > Globalen Sensor
erzeugen > Globaler Fehlergrad (%)
[Global Error Rate].
Eintrag des Fehlers im Baum.
Ana1_Balken2_ohneLoesg.CATAnalysis
Globaler Fehler sollte 10% sein, in
spannungskritischen Bereichen 5%.
Bild 8: Globaler Sensor Fehlergrad
Anzeige der Berechnungsergebnisse
Bild 9: Symbole für die Anzeige von Berechnungsergebnissen
verformtes Netz [deformed Mesh]
von Mises-Spannung [von Mises Stress]
Abweichung (Verschiebung) [Displacement]
Hauptspannungen [Principal Stress]
Genauigkeit (geschätzte lokale Spannungs-fehler) [Precision]

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 17 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Hauptspannungen anzeigen lassen .
Ansicht Schattierung mit Material einstellen .
RMT auf Baumeintrag Hauptspannungstensor Symbol.1 > Objekt Hauptspannungstensor Symbol.1 > Definition > Fenster Bildbearbeitung.
Register Darstellg.: Typen Durchschnittliches ISO [Average iso], Kriterien Hauptwert [Prin-
cipal value] > Mehr >> > Komponente C11 wählen. Der Baumeintrag ändert sich in
Hauptspannungstensorkomponente (Knotenwerte) [Stress principal tensor component (no-dal values)]. Auf den Bildern ist meist noch die Benennung älterer Releases „Hauptspan-nung ISO“ angegeben.
Register Auswahlmöglichkeiten: nur OCTREE-Tetraedernetz mit Verschiebepfeil in unteres Fenster.
Bild 10: Einstellungen zur Anzeige der Hauptnormalspannung 1
Bild 11: Hauptnormalspannung 1 bei linearer, viel zu grober Vernetzung.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 18 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
4.4 Genauigkeit erhöhen
4.4.1 Kleinere globale Netzgröße
Zunächst noch mit linearer Vernetzung rechnen, proportionaler Durchhang 0,2 (eigentlich bei der
Geometrie keine Vorgabe erforderlich), Ana2_Balken2_lin20mm.CATAnalysis
Mit RMT auf die im Baumzweig Lösungen vorhandene, darzustellende Lösung > Aktivieren.
Globale Netzgröße 40 mm maximale Hauptnormalspannung 4,1 MPa,
Globale Netzgröße 20 mm maximale Hauptnormalspannung 6,78 MPa an den Ecken,
Globale Netzgröße 10 mm maximale Hauptnormalspannung 5,75 MPa,
Globale Netzgröße 5 mm längere Rechenzeit, u. U. wird CATELFSlaveProcess.exe
gestartet, maximale Hauptnormalspannung 8,1 MPa.
Bild 12: Hauptnormalspannung bei linearer Vernetzung, Netzgröße 5 mm
Lineare Tetraederelemente mit nur 4 Eckknoten (TE4-Elemente) sind in sich steif und versteifen
deshalb die Struktur. Sie sollten nur für erste Rechnungen zur Überprüfung des Modells verwen-
det werden, nicht für Spannungsberechnungen.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 19 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
4.4.2 Kleinere lokale Netzgröße
Zunächst noch mit linearer Vernetzung ohne Vorgabe des Durchhangs rechnen.
Ana2_Balken2_lin20mm.CATAnalysis öffnen. LMT-Doppelklick auf OCTREE-Tetraedernetz.1,
Register Global: Netzgröße ändern von 20 mm in 40 mm, Proportionaler Durchhang inaktivie-
ren.
Lokale Netzgröße an der Einspannfläche variieren. Dazu Netz im Baum markieren und dann Symbol Größe des lokalen Netzes [Local Mesh Size] selektieren.
Bild 13: Lokale Netzgröße an der Einspannfläche
Bild 14: Hauptnormal- und v. Mises-Spannung bei lokaler Netzgröße 10 mm an der Ein-
spannfläche

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 20 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Lokale Netzgröße 10 mm maximale Hauptnormalspannung 7,95 MPa an den Ecken,
Lokale Netzgröße 5 mm maximale Hauptnormalspannung 8,5 MPa an den Ecken.
4.4.3 Parabolische Netzelemente (Tetraeder mit Zwischenknoten, TE10)
Ana2_Balken2_lin20mm.CATAnalysis öffnen. LMT-Doppelklick auf OCTREE-Tetraedernetz.1,
Register Global: Netzgröße ändern von 20 mm in 40 mm, Proportionaler Durchhang inaktivie-
ren.
Mit Symbol Elementtyp > parabolisch vernetzen, mit Extremwert bei Bild [Image Extrema]
aus der Symbolleiste Analysetools die Punkte der Extremwerte anzeigen lassen.
Zunächst ohne lokale Vernetzung und ohne Vorgabe für Durchhang.
Globale Netzgröße 40 mm maximale Hauptnormalspannung 7,39 MPa an den Ecken,
Bild 15: Hauptnormalspannung und Extremwerte bei parabolischem 40 mm-Netz
Globale Netzgröße 20 mm maximale Hauptnormalspannung 9,79 MPa an den Ecken,
ca. 6,8 MPa an oberer Kante,
Globale Netzgröße 10 mm maximale Hauptnormalspannung 11,1 MPa in den äußersten
Eckbereichen, 6 ... 8 MPa an oberer Kante.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 21 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 16: Hauptnormal- u. v. Mises-Spannung bei 10 mm-Netz
4.4.4 Adaptive Vernetzung
Das Netz mit parabolischen Tetraederelementen wird so angepasst, dass in Bereichen großer
Spannungsgradienten die Netzgröße vermindert wird. Das ist nicht immer sinnvoll.
Ana2_Balken2_lin20mm.CATAnalysis öffnen. LMT-Doppelklick auf OCTREE-Tetraedernetz.1,
Register Global: Netzgröße ändern von 20 mm in 40 mm, Proportionaler Durchhang inaktivie-
ren, Elementtyp Parabolisch einstellen.
Parabolisches Tetraedernetz, globale Netzgröße 40 mm, kein lokal verfeinertes Netz.
Globale Adaptivität definieren (Neue Adaptivitätseinheit [New Adaptivity Entity] > objek-
tiven Fehler vorgeben > als Stützelement Tetraedernetz auswählen. U. U. muss erst neu be-
rechnet werden , bevor der aktuelle Fehler angezeigt wird.
Bild 17: Definition einer globalen Adaptivität
Mit Adaptivität berechnen [Compute with Adaptivity] , zu finden auf der Symbolleiste Be-
rechnen [Compute].

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 22 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Falls gröbere Vernetzung zugelassen wird, kommt
Warnhinweis bei Netzvergrößerung.
Bild 18: Mit Adaptivität berechnen
Bild 19: Im Ergebnis verminderter aktueller Fehler
Bild 20: Adaptiv modifiziertes Netz und Hauptnormalspannung
4.4.5 Spannungsverteilung durch modifizierte Einspannbedingungen ver-bessern
Die nicht genau der Realität entsprechende Verformung an der Balkeneinspannung wird beson-
ders beim gedrungenen Balken deutlich, also beispielsweise Variante 3 der Konstruktionstabelle.
Ana3_gedrungBalken3_fSimul.CATAnalysis

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 23 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
RMT auf die Lösung für statischen Prozess Verformtes Netz.1 [Deformed mesh.1] > Aktivieren.
Aus der Symbolleiste Analysetools Symbol Größe der Erweiterung
[Amplification Magnitude] wählen und Skalierungsfaktor 1500 ein-
geben. Mit dem Symbol Animieren [Animate] aus der gleichen
Symbolleiste wird die Animation gezeigt und damit die Verformungs-
behinderung an der eingespannten Fläche deutlich erkennbar.
Wegen der Verformungsbehinderung in der x-y-Einspannebene
kommt es zu nicht der Realität entsprechenden Spannungsspitzen in
den Ecken.
Bild 21: Verformungsbehinderung in Querrichtung durch feste Ein-spannung des Balkens
4.4.5.1 Indirekte Einspannung über bewegliches virtuelles Teil
Eigenschaften beweglicher virtueller Teile (Tabelle 5)
Gemäß CATIA-Hilfe estug.pdf:
„Ein bewegliches virtuelles Teil ist ein starrer Körper, der einen angegebenen Punkt mit an-gegebenen Teilegeometrien verbindet. Er verhält sich wie ein massenloses starres Objekt, das Aktionen (Massen, Randbedingungen und Lasten), die am Bearbeitungspunkt ange-wendet werden, flexibel überträgt, ohne den/die verformbaren Körper zu versteifen, mit denen es verbunden ist. Das bewegliche virtuelle Teil berücksichtigt die elastische Ver-formbarkeit der Teile, mit denen es verbunden ist, näherungsweise.“
Es werden also Zug- und Druckkräfte sowie Momente übertragen.
Statt der unmittelbaren Einspannung der Balkenstirnfläche soll an dieser ein bewegliches vir-tuelles Teil angreifen, das fest eingespannt wird.
Bewegliches virtuelles Teil [Smooth Virtual Part] (zu
allen Knoten auf der Fläche einschließlich Zwischen-
knoten)
Feste Einspannung [Clamp] mit Stützelement [Support]
Bewegliches virtuelles Teil.1
Bild 22: Stirnfläche als Stützelement [Support] für bewegli-ches virtuelles Teil

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 24 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 23: Bewegliches virtuelles Teil (spinnennetzförmig), globale Größe 10 mm.
Zur Vermeidung der Verformungszipfel zusätzlich Flächenloslager [Surface Slider] auf
Einspannfläche.
Berechnung des Balkens 2 der Konstruktionstabelle, parab. Netz, globale Größe 40 mm,
Einspannfläche lokale Netzgröße 5 mm.
Ana4_Balken2_bewvirtTeil_u_Flaechengleitlager.CATAnalysis
Bild 24: Unzutreffende Spannungsgröße und Spannungsverteilung bei Einspannung über bewegliches virtuelles Teil
Bild 25: Gedrungener Balken – Quer-verformung nicht behindert, aber zipfelige Verformung durch virtuelles Teil.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 25 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 26: Hauptspannung
Bild 27: v. Mises- Vergleichsspannung
Hauptnormalspannung 1 = 6,29 ... 6,46 MPa,
Spannung in Richtung Stabachse in den Randfasern z = 6,29 ... 6,45 MPa, regellos.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 26 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
4.4.5.2 Erweiterte Randbedingungen
Werden zwei erweiterte Randbedingungen [User-defined Restraint] definiert, auf der Stirn-
fläche zunächst nur gem. Bild 28, zusätzlich am unteren, rechten Eckpunkt die 1. Verschiebung
(x) gesperrt, dann zeigt das verformte Netz die nicht behinderte Querverschiebung. Allerdings
werden zu große Spannungen ausgewiesen (Bild 29), weil keine Kontraktion der Einspannfläche
in y-Richtung zugelassen wird.
Bild 28: Erweiterte Bedin-gungen und ver-formtes Netz
Nach Freigabe der 2. Verschiebung (y) für die Fläche und dafür zusätzlichen Einschränkungen
der 2. Verschiebung an den unteren Eckpunkten stimmt die Spannung in der oberen Randfaser,
ist allerdings an den unteren Knotenpunkten der Ecken weit überhöht (Bild 30).
Bild 29: Spannungen z bei Einspannbe-dingungen gem. Bild 28
Bild 30: Spannungen z nach veränderten Einspannbedingungen

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 27 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
4.4.5.3 Einspannung nur eines schmalen Streifens um die neutrale Faser
Balken2_Konsttab_integr_Teilflaeche.CATPart
In der Umgebung GSD wurde mit Ableiten [Extract] aus der Symbolleiste Ableitungen die
Stirnfläche abgeleitet und durch Trennen [Split] ein schmaler Flächenstreifen erzeugt
(Benutzerparameter Hoehe_Einspannstreifen).
In Umgebung PD schmalen Streifen als Fläche integrieren [Sew Surface] , dabei nicht
Geometrie vereinfachen.
Bild 31: Integration des Flächenstreifens für die Einspannung
FEM-Randbedingungen
Netz parabolisch, globale Größe 40 mm,
lokale Größe 1 mm für Einspannfläche,
lokale Größe 5 mm für oberen und unteren Stirnflächenteil,
feste Einspannung des schmalen Streifens,
Flächenloslager für oberen und unteren Stirnflächenteil,
verteilte Last (wirkt auf Knoten) Fy = - 1000 N über Formel Parameter zuweisen bzw.
Dichte der Kraft [Force Density] .
Hauptnormalspannung
Ana5_Balken2_EinspStreifen_Flaechenlosl_parab_glob40mm_lok1u5mm.CATAnalysis
RMT auf Hauptspannungstensorkomponente [Stress principal tensor comonent] > Aktivie-
ren.
Nicht relevante Spannungsspitzen der Einspannfläche sind „ausgeblendet“ mittels LMT-
Doppelklick auf Farbstreifen (oder RMT auf Farbstreifen > Objekt Farbzuordnung > Definiti-
on) und Begrenzung des angezeigten Maximalwertes auf 6,2 MPa (Bild 32).
Über den Schalter Mehr >> können weitere Einstellungen vorgenommen werden, z. B. die
Stufung der Farbskala.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 28 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 32: Anpassen der Farbskala
Am oberen Rand über Breite von der Ecke zur Mitte 1 = 6,01 ... 6,08 MPa.
Spannung in Richtung Stabachse (Spannungstensorkomponente C33)
Spannungstensorkomponente aktivieren und Hauptspannungstensorkomponente deaktivie-
ren,
Spannungen in den Randfasern z = 6,01 MPa an den Ecken und z = 6,08 MPa in der
Mitte entsprechen der analytisch berechneten Spannung (Bild 33).
Von Mises-Spannungen entsprechen mit 6,01 MPa in den Ecken und 6,02 MPa in der Mitte
der analytisch berechneten Spannung noch besser.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 29 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 33: Spannung in Richtung Stabachse (Spannungstensorkomponente C33) in den Randfa-
sern z = 6,01 MPa an den Ecken und z = 6,08 MPa in der Mitte
4.4.5.4 Vergleich der modifizierten Einspannvarianten
Mit verteilter Last und gleichen Netzgrößen (bis auf zusätzlichen Einspannstreifen bei 4.4.5.3),
ergeben sich ohne die überhöhten Spannungen die Werte nach Tabelle 1.
Tabelle 1: Vergleich der modifizierten Einspannvarianten
Vergleichskriterium
Variante
4.4.5.1 bew. virt. Teil + Flächenloslager
4.4.5.2 erweitere Ein-spannbeding.
4.4.5.3 Einspanng. am Mittelstreifen
Maximum Hauptnormalspannung 1 in MPa 6,46 5,98 6,08
Randfaserspannung in Richtung Stabachse z in MPa 6,29 ... 6,45 ca. 6 % größer als analyt. Be-
rechnung
5,96 ... 5,98 ca. 99,5 % der analyt. Berech-
nung
6,01 ... 6,08 ca. 100,8 % der analyt. Berech-
nung
von Mises-Randfaserspannung in MPa 6,21 ... 6,36 ca. 5 % größer als analyt. Be-
rechnung
6,01 ... 6,02 ca. 100,3 % der analyt. Berech-
nung

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 30 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
5 Bedeutung der errechneten Spannung- und Verfor-mungswerte
5.1 Spannungen
Mehrachsigen Spannungszustand umrechnen zum Vergleich mit Werkstoffkennwerten, die bei
einachsiger Beanspruchung ermittelt werden.
Komponenten des Spannungstensors
zzyzx
yzyyx
xzxyx
xzzxzyyzyxxy ,,
In den Ebenen der Hauptnormalspannungen
321
sind die zugehörigen Schubspannungen Null.
Bild 34: Spannungskomponenten
5.2 Festigkeitshypothesen und Vergleichsspannungen
Querkontraktionszahl (Stahl 0,3; GG 0,25; Gummi 0,5),
Poissonzahl, = 1/.
Normalspannungshypothese (Hauptnormalspannungshypothese)
Größte Normalspannung ist maßgebend für Versagen Trennbruch.
Sprödbruchgefährdete Teile, z. B. aus Grauguss bei Zug, durchgehärteter Stahl,
1v σσ . (11)
Dehnungshypothese (Hauptdehnungshypothese)
Größte Dehnung ist maßgebend für Versagen Trennbruch.
Sprödbruchgefährdete Teile, z. B. aus Grauguss bei Zug.
E
σεε v1max , (12)
321v σσσσ . (13)
Schubspannungshypothese (Hauptschubspannungshypothese)
Größte Schubspannung ist maßgebend für Versagen plastisches Verformen, Dauerbruch.
Werkstoffe mit ausgeprägter Streckgrenze, wie weicher Stahl.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 31 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
2
31max
, (14)
31v σσσ . (15)
Gestaltänderungsenergiehypothese (v. Mises u. a.)
Gestaltänderungsenergie ist maßgebend für Versagen plastisches Verformen, Dauer-
bruch.
Walzstahl, geschmiedeter Stahl, auch im vergüteten Zustand.
2
213
232
221
v
. (16)
Erweiterte Schubspannungshypothese, Versagen tritt ein, wenn der größte Mohrsche Kreis
die Versagensgrenze tangiert Gleitbruch.
5.3 Spannungsanzeigen in CATIA
Tabelle 2: Varianten der Spannungsanzeige beim Befehl Hauptspannung
Typen
Kriterien
Hauptneigung [Principal shaering]
Hauptwert [Principal value]
Hauptwert (absolu-ter Wert)
Tensorkomponente [Tensor component]
von Mises
Berandung [Fringe] X
Diskontinuierliches ISO [Discontinuous iso]
X X X X X
Durchschnittliches ISO [Average iso]
X X X X X
Symbol X
Text X X X X 1) X
1) Statt Tensorkomponente „Steuerelement für symmetrische Spannung” [Symmetrical tensor]
5.4 CATIA-Benennungen und -Kurzzeichen:
„Hauptneigung“ – Hauptschubspannung (ISO-Scherung) nach Versagenshypothese für duk-
tile Werkstoffe, z. B. Stahl mit ausgeprägter Streckgrenze,
2
31max
. (17)
„Hauptwert“ – Hauptnormalspannungen nach Versagenshypothese für sprödbruchgefährdete
Werkstoffe, z. B. Grauguss mit Lamellengraphit. Mittels Filter Auswahl der anzuzeigenden
Hauptspannung (RMT > Objekt ... > Definition > Register Darstellung > Hauptwert > Mehr
>> > Filter Komponente: )
3D-Elemente 321 σC33,σC22,σC11 ,
2D-Elemente, nur 21 σC22,σC11 .
Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 32 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
„Tensorkomponente“ – Normal- und Schubspannungen im aktuellen GSA-Achsensystem
(RMT > Objekt ... > Definition > Register Darstellung > Tensorkomponente > Mehr >> > Fil-
ter Achsensystem: ... > Typ: Benutzer > Achsensystem im Baum selektieren >
OK ).
yzxzxyzyx 23C,13C,12C,33C,22C,11C .
„Von Mises” – v nach Gestaltänderungsenergiehypothese gem. . (16) bzw. mit den
Tensorkomponenten
2
yz2xz
2xy
2zy
2zx
2yx
v 32
. (18)
„Symbol“ – Pfeile als Spannungsvektoren, ermöglicht nur Anzeige der Hauptspannungen
(Alle, C11 = 1, C22 = 2, C33 = 3, C11 + C22, C11 + C33, C22 + C33).
Diskontinuierliches und durchschnittliches ISO
In der Regel mit „Durchschnittliches ISO“, d. h., geglättete Durchschnittswerte der einzelnen
Elementknoten. „Diskontinuierliches ISO“ weist nicht geglättete und damit höhere Werte aus.
5.5 Verschiebungen
C1 = vx, C2 = vy, C3 = vz im aktuellen GSA-Achsensystem

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 33 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
6 Lagerungs-, Kopplungs- und Lastbedingungen
6.1 Allgemeines
Lagerung von Bauteilen und Kopplung zwischen Bauteilen über Verbindungsnetze erfolgt durch
Einschränkungen der Knotenfreiheitsgrade. Kann durch diese Einschränkungen der reale Fall
nicht hinreichend genau abgebildet werden, weichen die berechneten Verformungen und insbe-
sondere die Spannungen im Bereich der Lagerung/Kopplung von den realen Werten mehr oder
weniger stark ab. So gibt es wegen der Elastizität aller Bauteile in praxi weder feste Einspannun-
gen noch starre Auflager, wie z. B. starre Flächenloslager. Die Werkstoffe verformen sich dreidi-
mensional. Wird diese dreidimensionale Verformung durch Knotenfixierung verhindert, werden
größere als die tatsächlichen Spannungen errechnet.
Analog gilt das für die Einleitung von Belastungen über die Knoten.
Mit zusätzlichen virtuellen Teilen können Randbedingungen auf Bauteile übertragen werden.
Virtuelle Teile sind masselose Objekte, die praktisch Bauteile ohne Geometrie darstellen. Sie
verbinden einen Punkt mit der Bauteilgeometrie. An diesem automatisch erzeugten bzw. selek-
tierten Punkt – Steuerroutine genannt – können Lagerungs- und/oder Lastbedingungen definiert
werden. Damit lassen sich Bauteillagerungen u. U. besser der Realität anpassen. Virtuelle Teile
vergrößern allerdings die Gesamtknotenanzahl und damit die Berechnungszeit sowie den Spei-
cherbedarf.
CATIA-Hilfe \estug.pdf > „Virtuelle Teile“
6.2 Lagerungsrandbedingungen
Tabelle 3: Lagerungsrandbedingungen für Bauteilgeometrie und virtuelle Teile (teilweise)
Befehl
Stützelemente Körper lokal
versteift
elast. Ver- formbarkeit
der Teile berücksichtigt
Übertragung Zug, Druck, Momente
(Fläche xy)
Bemerkung, Anwendung Sym- bol
Benennung
Feste Einspan-nung [Clamps]
Punkt, Kurve, Fläche, Gruppierung, virtuelles Teil
einge- spannte Stütz-
elemente
Stützele-mente nein
alle F und M Fixierung aller Knotenpunkte auf dem Stützelement; Schweiß-, Klebverbindungen, sonstige Fixierung
Flächenlosla-ger/Gleitlager [Surface Slider]
Fläche, Grup-pierung
nein ja, mit
Ausnahme Stützelement
Fz
Mx, My
Gleiten entlang einer kongru-enten, starren Fläche, z. B. Abstützen von Bauteilen, Symmetrierandbedingung
Erweiterte Be-dingung [Advanced Rest-raints]
Punkt, Kurve, Fläche, Gruppierung, virtuelles Teil
Stützele-mente in Richtung Fixierung
nicht in fixier-ter Richtung
je nach Frei-heitsgradent-
zug
Universelle, benutzerdefinier-te Sperrung der Freiheitsgra-de
Isostatische Randbedingung [Isostatic Rest-raint]
gesamtes Simulations-modell (Kör-per, Baugrup-pe)
nein ja keine Starrkörperverschiebung aus-geschlossen, dabei elastische Verformung der Körper un-eingeschränkt, lt. /1/ für Fre-quenzanalysen (falsche Ei-genfrequenzen!) o. Körper auf sehr weichen Unterlagen

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 34 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Tabelle 4: Zusätzliche Lagerungsrandbedingungen für virtuelle Teile
Befehl
Stützelemente Körper lokal
versteift
elast. Ver- formbarkeit
der Teile berücksichtigt
verbleibende Freiheitsgra-de (Achse = X, Drehung
um Achse A)
Bemerkung, Anwendung Sym- bol
CATIA- Benennung
„Loslager“ [Slider]
virtuelles Teil abhängig vom Typ des virtuellen Teils
(Tabelle 5)
X Verschiebung entlang einer Achse, Längsführung
Gleitdrehpunkt [Sliding Pivot]
X, A Verschiebung entlang und Drehung um eine Achse, Radial-Loslager
Kugelgelenkver-bindung [Ball Join]
A, B, C Drehung um einen Punkt, Kugelgelenk
Drehpunkt [Pivot]
A Drehung um eine Achse, Festlager (Radial-Axiallager)
„Freigegebene Richtung“: durch Eingabe der Kosinuswerte Ausrichtung der Lagerachse definie-
ren, globales oder Benutzerkoordinatensystem (Baum- oder Geometrieselektion).
CATIA-Hilfe \estug.pdf > „Loslager erzeugen“,
CATIA-Hilfe \estug.pdf > „Gleitdrehpunkte erzeugen“,
CATIA-Hilfe \estug.pdf > „Kugelgelenkverbindungen erzeugen“,
CATIA-Hilfe \estug.pdf > „Drehpunkte erzeugen“.
Oft ist statt der Lagerungen über virtuelle Teile nach Tabelle 4 eine erweiterte Bedingung nach
Tabelle 3 mit entsprechend gesperrten Freiheitsgraden sinnvoller. Zu berücksichtigen ist aber die
Versteifung der Stützfläche, die ggf. entsprechend klein zu wählen ist.
Die Angaben in den Tabellen zur Versteifung von Körpern und zur elastischen Verformbarkeit
der Stützgeometrie konnten bisher vom Autor nicht alle vollständig getestet werden. Aussagen in
der CATIA-Hilfe und in der Literatur dazu sind sehr lückenhaft.
Beispiel: Ana6_Bgr4Teile_Vgl1.CATAnalysisZum besseren Verständnis der Erklärungen in der
CATIA-Hilfe sind im Abschnitt 17 FEM-Elemente im Elfini Solver die verschiedenen FE-Elemente
einschließlich der für Verbindungsnetze zusammengestellt.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 35 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
6.3 Virtuelle Teile
Tabelle 5: Virtuelle Teile
Befehl
Stützelemente Körper lokal
versteift
elast. Ver- formbarkeit der Teile
berücksichtigt
Übertragung Zug, Druck, Momente
(Fläche xy)
Bemerkung, Anwendung Sym- bol
Benennung
Starres vir-tuelles Teil [Rig-id Virtual Part]
Fläche, Kante/Kurve (auch Mehr-fachselektion)
ja nein alle F und M Fixierung aller Knotenpunkte auf dem Stützelement; Schweiß-, Klebverbindungen, sonstige Fixierung
Bewegliches virtuelles Teil [Smooth Virtual Part]
nein näherungsweise alle F und M Verbindung aller Knoten-punkte auf dem Stützelement mit dem Steuerpunkt über ein bewegliches Netz.
Einleiten von Kräften und Momenten sowie Bauteillage-rung mit Abstand zur Geo-metrie (nicht modellierte An-schlussteile).
Virtuelles Kon-taktteil [Contact Virtual Part]
nein ja zwischen einander gegenüber-liegenden Flächen Druckkraft u. Momente
Insbesondere zur Modellie-rung von Lagerungen (Wel-len, Achsen, Führungen). „Sicherheitsabstand“ für Spiel (+) bzw. Vorspannungs-/ Presspassungsübermaß (-). Starrkörperverschiebung/ -drehung nur normal zur Fläche verhindert.
Virtuelles Teil mit starrer Fe-der [Spring Vir-tual Part]
ja näherungsweise je nach ge-wählter Weg- u. Drehfeder-zahl > 0 in den 6 Frei-heitsgraden
Elastische Bauteillagerung mit linearen Federsteifen und Versteifung der Anschluss-geometrie.
Virtuelles Teil mit beweglicher Feder [Smooth Spring Virtual Part]
nein näherungsweise Elastische Bauteillagerung mit linearen Federsteifen ohne Versteifung der An-schlussgeometrie.
CATIA-Hilfe \estug.pdf > „Virtuelle Teile“

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 36 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
6.4 Kopplung zwischen Bauteilen
Die Modellierung der Kopplung zwischen Bauteilen – in der CATIA-Hilfe „Eigenschaftsverbin-
dungen“ benannt – bezieht sich auf zwei Typen.
Bedingungen zur Positionierung der Bauteile zueinander in der Umgebung Baugruppenkon-
struktion (Assembly Design),
Analysebedingungen, die in der Umgebung GSA definiert werden. Sie charakterisieren die
Verbindung, ohne die Bauteile zu positionieren, weshalb auch das Problem der Überbestim-
mung nicht auftritt; deshalb gegenüber Baugruppenbedingungen zu bevorzugen.
„Eigenschaftsverbindungen“ gibt es für
nahe Verbindungen – Abstände dürfen nicht zu groß sein,
ferne Verbindungen.
Übersicht:
\B19doc\German\online\German\CATIAfr_C2\estugCATIAfrs.htm > „Analysen allge-
meiner Verbindungen“ „… dienen zur Verbindung eines Teils aus einer Baugruppe mit oder ohne Bearbei-
tungspunkt mit einem Baugruppenmodell. Die Verbindung kann zwischen beliebigen Geometrietypen erzeugt wer-
den. Die Verbindung muss zwischen zwei Komponenten erzeugt werden. Bei einer Komponente kann es sich um
Folgendes handeln:
einen Scheitelpunkt,
eine Kante oder per Multiselektion ausgewählte Kanten derselben Komponente,
eine Fläche oder per Multiselektion ausgewählte Flächen derselben Komponente,
eine mechanische Komponente (z. B. Skizze, Block, Zusammenbauen, Entfernen) {Kle: statt des eigentlich
überflüssigen Befehls „Zusammenbauen“ besser mit den Booleschen Operationen Hinzufügen,
Entfernen und Verschneiden arbeiten!},
eine Gruppe (definiert über die Symbolleiste Gruppen in der Strukturanalyseumgebung (Generative Structural Ana-
lysis) oder die Kontextmenüoption Gruppe erzeugen in der Strukturanalyseumgebung oder der Umgebung Advan-
ced Meshing Tools),
Gruppen (definiert über die Symbolleiste Gruppen) können nur dann als Komponente ausgewählt werden, wenn sie
in den Unteranalysen definiert wurden.
Als Komponenten ausgewählt werden können auch Gruppen unter einem Vernetzungsteil (definiert über die Kon-
textmenüoption Gruppe erzeugen).“
Eine Verbindung mit einem Scheitelpunkt auf einer Seite nimmt keinen Bearbeitungspunkt an.“
CATIA-Hilfe \estug.pdf > „Eigenschaftsverbindungen“, ab R16 „Verbindungseigen-
schaften“,
CATIA-Hilfe \estug.pdf > „Analyseverbindungen“.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 37 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
6.4.1 Analyseverbindungen
Tabelle 6: Analyseverbindungen
Befehl Stützelemente,
Schweißgeometrie Bemerkung, Anwendung Sym-
bol Benennung
allgemeine Verbindung [Ge-neral Analyse Connection]
beliebige Geomet-rie, teilweise auch Multiselektion
Nachbildung von Verbindungen zwischen Bauteilen mit oder ohne Abstand. Wichtig für Freiformflä-chen, die keine Baugruppenbedingungen zulassen.
Analyse von Punktver-bindungen in einem Bauteil [Point Analysis Connection within one Part]
3D- o. 2D-Teil, se-parates Verzeichnis mit Punkten
Nachbildung von Schweißpunktverbindungen zwi-schen parallelen Flächen in einem Bauteil (z. B. abgekantetes Blech). Punkte in separatem Geom. Set, Geordn. geom. Set o. Geöffn. Körper. Muster und Skizzen werden nicht separat erkannt.
Analyse von Punktver-bindungen zwischen zwei Bauteilen [Point Analysis Connection]
3D- o. 2D-Teile, separates Verzeich-nis mit Punkten
Nachbildung von Schweißpunktverbindungen zwi-schen parallelen Flächen zweier Bauteile. Punkte in separatem Geom. Set, Geordn. geom. Set o. Ge-öffn. Körper. Muster und Skizzen werden nicht sepa-rat erkannt.
Analyse von Linienver-bindungen in einem Bauteil [Line Analysis Connection within one Part]
3D- o. 2D-Teile, Linie, Kurve oder Berandungskurve für Nahtverlauf
Nachbildung von Schweißnahtverbindungen zwi-schen parallelen Flächen in einem Bauteil (z. B. abgekantetes Blech, wie Aschekasten).
Analyse von Linienver-bindungen zwischen zwei Bauteilen [Line Analysis Connection]
3D- o. 2D-Teile, Linie, Kurve oder Berandungskurve für Nahtverlauf
Nachbildung von Schweißnahtverbindungen zwi-schen parallelen Flächen zweier Bauteile.
Schrittfolge bei Schweißverbindungen, z. B. in einem Teil Schweißpunkte vom Typ Hexaeder :
1. Analyseverbindung erstellen: z. B. Analyse von Punktverbin-
dungen in einem Teil.
Erste Komponente: Blech selektieren.
Punkte: Geometrisches Set mit den Punkten im
Baum selektieren (Muster werden nicht mit übernommen, Stand R19).
2. Material für Schweißnaht / Hexaeder-Schweißpunkte definieren: > Eintrag im Baum-
zweig Materialien. Ggf. über RMT > Eigenschaften > Benennung des Benutzermaterials
ändern.
3. Verbindungsnetz der Schweißpunkte/-naht erzeugen: z. B. Eigenschaft der
Punktschweißverbindung. Bei den Typen Träger und Hexaeder Material zuweisen. Im Nor-
malfall wird Typ starr verwendet.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 38 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 35: Eigenschaften der Punktschweißverbindung Typ Hexaeder mit Materialzuweisung
Typ: Hexaeder, (noch braunen) Schraubenschlüssel anklicken > unbedingt Benutzerde-
finiertes Material für Schweißpunkte/-naht zuweisen und Selektion im Baumzweig Materia-
lien > OK Netz im Baumzweig Knoten und Elemente.
4. Parameter der Schweißpunkte/-naht festlegen:
Doppelklick auf Netz im Baumzweig Knoten und Elemente > Punktdurchmesser bzw. Naht-
breite u. a. eingeben.
Bild 36: Parameter der Schweißpunkte festlegen
Wenn die maximale Lücke zu klein gewählt wurde,
kommt eine Warnung, dass die Netzgenerierung nicht
möglich ist. Deshalb maximale Lücke etwas größer als
den gemessenen Wert wählen.
Beispiele:
Ana7_Schweisspunkte_ein_Teil.CATAnalysis mit parabolischem Dreiecknetz und
2 mm Blechdicke als 2D-Eigenschaft
Ana8_Schweisspunkte_Bgr.CATAnalysis mit parabolischen Tetraedernetzen.
Hinweis: Wenn die Modelle für die verfügbare Hardware zu groß werden, müssen u. U. die Ein-
zelteile der Schweißbaugruppe als Körper (mit einem Spaltabstand) in einem Bauteil
erzeugt werden. Schweißpunkte und -nähte sind ggf. als getrennte Körper zu konstruie-
ren. Alles muss mit Booleschen Operationen im Hauptkörper verbunden sein, für den
nur Tetraedernetze erzeugt werden. Schweißpunktkörper sind lokal entsprechend fein
zu vernetzen.
Ana9_alles_im_Hauptkoerper.CATAnalysis

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 39 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
6.4.2 Nahe Verbindungen
6.4.2.1 Arten und Eigenschaften naher Verbindungen
Die Stützelemente der Baugruppenbedingungen funktionieren nicht alle in jedem Fall. In der Re-
gel müssen Kontakt, Abstand und Winkel auf zwei Teilflächen bezogen sein, nicht auf Punkte
und Kanten. Auch wenn sich die Verbindungen mit solchen Stützelementen erzeugen lassen,
sind sie nutzlos, wenn sie nicht genügend Freiheitsgrade binden.
Tabelle 7: Kopplungsrandbedingungen für geringe Abstände
Befehl
Stützelemente Körper lokal
versteift
elast. Ver- formbarkeit
der Teile berücksichtigt
Übertragung Zug, Druck, Momente
Bemerkung, Anwendung Sym- bol
Benennung
Gleitverbindung [Slider Connec-tion]
nein ja
Zug u. Druck
lokales Flächenele-ment u. Mo-mente um tangentiale Achsen (> alle F und M bei 3D-Frei-formfläche außer Ku-gel)
Tangentiales Gleiten zwischen Bezugsgeometrien möglich.
Gleitführung mit „Umgriff“/ Gleitlager
Gleitlager mit Spiel (auf Bau-gruppenbedingung Linien-kontakt)
Kugelkalotte
Verdrehsicherung (z. B. auf Baugruppenbedingung Win-kel zwischen ebenen Flä-chen)
Kontaktver-bindung [Contact Connection]
nein ja Druck lokales Flä-
chenelement
Alle Bewegungen außer Be-zugsgeometrien aufeinander zu. Innerhalb des positiven Sicher-heitsabstandes auch aufeinan-
der zu möglich. Sicherheitsab-
stand eingeben (0, + Spiel/2, - Passungsübermaß/2)!. Länge-re Rechenzeit als bei Gleit- o. fixierter Verbindung.
Gleitführung ohne „Umgriff“
Press- bis Spielpassung
Schraubenkopfauflage, wenn Schraubentlastung modelliert werden muss.
Druck zwischen Freiformflä-chen (Analyseverbindung)
Hertzsche Pressung
Fixierte Verbin-dung [Fastened Connection]
nein ja alle F und M Verbundene Teilegeometrien verhalten sich im Kopplungsbe-reich wie ein einziger Körper
Schweiß-, Löt-, Klebverbin-dung
Schraubenkopfauflage, wenn Schraubentlastung nicht mo-delliert werden muss.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 40 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Befehl
Stützelemente Körper lokal
versteift
elast. Ver- formbarkeit
der Teile berücksichtigt
Übertragung Zug, Druck, Momente
Bemerkung, Anwendung Sym- bol
Benennung
Fixierte Feder-verbindung [Fastened Spring Connection]
nein ja F und M je nach defi-nierten Fe-derzahlen
Elast. Verbindung zwischen zwei Bezugsgeometrien
Silentblock
elastische Maschinenaufstel-lung
Presspass-verbindung [Pressure Fitting]
nein ja alle F und M Alle Verschiebungen fixiert, auch tangentiale, die bei Gleit- u. Kontaktverbindung möglich sind. „Überlappung“ = Pas-sungsübermaß/2
Schrauben-verbindung (Bolzen-verbindung) [Bolt Tightening Connection]
vorzugswei-
se.
nur sehr kleiner Abstand
ja F in Achs-richtung
Vorgespannte Schraubenver-bindung mit/ohne Schraube.
Bedingung des Typs 'Teilfläche-Teilfläche' zwischen dem Bol-zengewinde und dem Gewinde des Bolzenstützelements. Flä-chen sollten kongruent sein. Achtung!!! Teilflächen müssen axial asymmetrisch zueinan-der liegen (sonst statt Linie für Ausrichtung des Schrauben-symbols nur Punkt).
Hertzsche Pressung kann mit dem CATIA-FEM-Elfini-Solver nicht hinreichend genau berechnet
werden.
6.4.2.2 Schraubenverbindungen
Die Modellierung von Verschraubungen mit dem Verbindungstyp „Eigenschaft der Bolzenverbin-
dung“ – richtiger übersetzt „Eigenschaft der Schraubenverbindung“ – soll an Beispielen gezeigt
werden. Als Startmodell für das erste Beispiel dient die Baugruppe
Schraubverbind_Viertelschn.CATProduct.
Der das Schraubengewinde repräsentierende Zylinder überragt die Muttergewindebohrung nach
beiden Seiten um die gleiche Länge. Die Gewinde sind also axial symmetrisch zueinander, was
nach Tabelle 7 nicht möglich sein sollte. Deshalb ist nach dem ersten Analyseversuch die Mut-
terlänge zu modifizieren.
Start > Analyse & Simulation > Generative Structural Analysis > Statikanalyse
Warnhinweis, dass Hauptkörper des Steuerteils leer ist – i. O.
Im Baumzweig Knoten und Elemente die von CATIA automatisch generierten Tetraedernet-
ze kontrollieren. Zur Überprüfung des FEM-Modells auf hinreichende Randbedingungen zu-nächst mit Elementtyp Linear rechnen.
Feste Einspannung der (Viertel-)Hülsenstirnfläche an der Mutterseite,
Flächenloslager auf y-z-Schnittfläche der Schraube.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 41 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Periodizitätsbedingungen erzeugen für
Schraube,
Mutter,
Hülse.
Bild 37: Periodizitätsbedingung
Kontaktverbindungen zwischen Auflageflächen Schrauben-
kopf/Hülse sowie Mutter/Hülse, als
Stützelement,
entweder Baugruppenbedingungen nutzen
Bild 38: In der Baugruppe definierte Bedingungen als Stützelement nutzen
oder erst Analysebedingungen als Stützelemente erzeugen.
Bild 39: Analysebedingung auf Stirnflächen
Dazu zweckmäßig Hülse verdecken und Hülsenflächen als zweite Komponente im nicht
sichtbaren Raum selektieren.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 42 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Schraubverbindung modellieren
Analyseverbindung der „Gewinde“.
Bild 40: Analyseverbindung der Gewindemantelflächen
Schraube mit Vorspannkraft als „Eigenschaft der Bolzenverbindung“ erzeugen.
Als Stützelement im Baumzweig Analyseverbindungsmanager
die Analyseverbindung Bild 40 selektieren.
Bild 41: Schraubverbindung mit Vorspannung
Berechen , zunächst nur Vernetzung.
Bild 42: Fehlermeldung bei axial symmetrisch zueinander liegenden Mantelflächen für Schrauben- und Muttergewinde
Modell: Ana10_Schraubverbind_Viertelschn_nichtfkt.CATAnalysis (TE10-Elemente) mit axial
symmetrisch zueinander liegenden Gewindeflächen. Mutterlänge modifizieren durch
Verlängern oder Verkürzen des Blocks gem. Bild 43, danach Baugruppe aktualisieren.
Im Bauteil Mutterlänge modifizieren, z. B. von 20 mm auf 22 mm verlängern (Bild 43). Damit
ist das Muttergewinde in Achsrichtung nicht mehr symmetrisch zum Schraubengewinde.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 43 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 43: Mutterlänge modifi- zieren
Erneut Berechen , zunächst nur Vernetzung. Jetzt wird Bolzenverbindung akzeptiert.
Elementtyp von Linear in Parabolisch umwandeln.
Berechnen Alle.
Spannungen und Verschiebungen anzeigen lassen, bei der extrem kleinen Vorspannkraft
natürlich nur sehr kleine Werte.
Bild 44: Von Mises Spannung oben und Translationsverschiebungsgröße unten
Zum Testen des Schraubverbindungsmodells sollen durch eine Längskraft auf die Hülse die
Schraubenvorspannung aufgehoben werden und dann durch eine Zugkraft am Schraubenkopf
die Hülsenvorspannung.
Dichte der Kraft auf Hülsenstirnfläche Fz -10000 N > von Mises-Spannung berechnen
(Bild 45 oben).
Dichte der Kraft auf Hülsenstirnfläche Fz 0 N und auf Schraubenkopfstirnfläche Fz 3000 N
> von Mises-Spannung berechnen (Bild 45 unten).
Die Entlastungen funktionieren mit einer Kontaktverbindung einwandfrei. Da Kontaktverbin-
dungsnetze mehr Rechnerressourcen erfordern, ist auch eine fixierte Verbindung möglich
, wenn die Vorspannkraft mit Sicherheit immer erhalten bleibt.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 44 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 45: Von Mises-Spannung bei Fz -10000 N auf Hülsenstirnfläche oben, bei Fz 3000 N auf Schraubenkopfstirnfläche unten.
Die analytisch aus dem Vorspanndiagramm berechneten Grenzen der Vorspannung stimmen mit
den CATIA-Berechnungsergebnissen der Eigenschaft der Schraubenverbindung gut überein.
Weitere Modelle:
Ana11_Schraubverbind_Viertelschn_fixVerb.CATAnalysis
Kein Spalt zwischen Schraubenkopf und verspanntem Element (Hülse) möglich, weil durch
die fixierte Verbindung bei einer Zugkraft auf den Schraubenkopf die Hülse mit gedehnt
wird und bei einer Druckkraft auf die Hülse die Schraube verschoben wird.
Stützelement der Schraubverbindung ist die Baugruppenbedingung Kongruenz zwischen
Schraube und Mutterbuchse. Mit diesem Stützelement muss die Mutterlänge nicht modifi-
ziert werden, weil die Schraubenachse unsymmetrisch zur Mutterachse liegt.
Ana12_M16_aufAnalyverb_KopfKontaktverb.CATAnalysis zum Nachrechnen der Spannun-
gen.
Bild 46: Spannungen in der M16-Schraube bei 15 kN Vorspannkraft
Dargestellt sind die größten Spannungen im Ausrundungsradius des Schraubenkopfes. Be-
achtet werden muss dabei aber, dass die Gewindegänge ja gar nicht modelliert sind.
Bild 47 zeigt die Schraubenspannung mit modellierten Gewindegängen. Nur die in einer
Richtung tragenden Flanken von Schrauben sowie Muttergewinde werden als Komponenten
einer Analyseverbindung gewählt und diese Analyseverbindung als Stützelement einer Gleit-

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 45 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
verbindung.
Bild 47: Größte Spannung im ersten tragenden Gewindegang bei Modellierung der Gewinde
Wird als Stützelement der Schraubverbindung in der Baugruppe eine Offsetbedingung statt der
Kongruenzbedingung zwischen den „Gewindeflächen“ von Schraube und Mutter mit einem Ab-
stand von 0 mm erzeugt, muss die Mutterlänge nicht modifiziert werden, weil der Offset sich bei
rotationssymmetrischen Teilen ebenfalls auf die Achsen bezieht und die Schraubenachse un-
symmetrisch zur Mutterachse liegt.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 46 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
6.4.3 Ferne Verbindungen
Die Stützelemente der Baugruppenbedingungen funktionieren nicht alle in jedem Fall.
Tabelle 8: Kopplungsrandbedingungen für größere Abstände
Befehl
Stützelemente Körper lokal
versteift
elast. Ver- formbarkeit der Teile
berücksichtigt
Übertragung Zug, Druck, Momente
Bemerkung, Anwendung Sym- bol
Benennung
Starre Verbin-dung [Rigid Connection]
ja nein F, M, je nach über-tragenen Freiheitsgra-den.
Nachbildung der Kraft und Momentenübertragung durch ein fehlendes, starres, mit den Bezugsgeometrien flächig verklebtes/verschweißtes Bau-teil. Relativbewegung zwi-schen den Bezugsgeometrien nur möglich, wenn Sperrung einzelner Freiheitsgrade auf-gehoben wird.
Bewegliche Verbindung [Smooth Connection]
kaum(?) näherungsweise F, M, je nach über-tragenen Freiheitsgra-den.
Nachbildung der Kraft und Momentenübertragung durch ein fehlendes Bauteil. Relativ-bewegung zwischen den Be-zugsgeometrien nur möglich, wenn Sperrung einzelner Freiheitsgrade aufgehoben wird.
Verbindung mit virtuellem Festdrehen von Schrauben (Bolzen) [Virtu-al Rigid Bolt Tightening]
ja, außer in Vor-spann-richtung
(?)
in Vorspannrich-tung
Nur Zugkraft in Achsrich-tung, Frei-heitsgrad in Druckrichtung muss ander-weitig ge-bunden sein. Übertragen
werden M um Achse. Aufgenom-men, aber nicht auf Teil 2 übertragen übrige F und M (?).
Nachbilden der Schrauben-vorspannung ohne Schraube durch virtuelle starre Bolzen-verbindung, auch bei großen Abständen. Vorspannkraft wird über ein „Kabelelement“ (Tightening Beam) auf starre Spinnennetze zu den Knoten des jeweiligen Bolzenberei-ches in beiden Bauteilen über-tragen.
Die Eigenschaft der virtuellen starren Bolzenverbindung entspricht einer benutzerdefi-nierten entfernten Verbindung der Kombination
Anfang: Beweglich,
Mitte: Bolzen-Starr,
Ende: Beweglich.
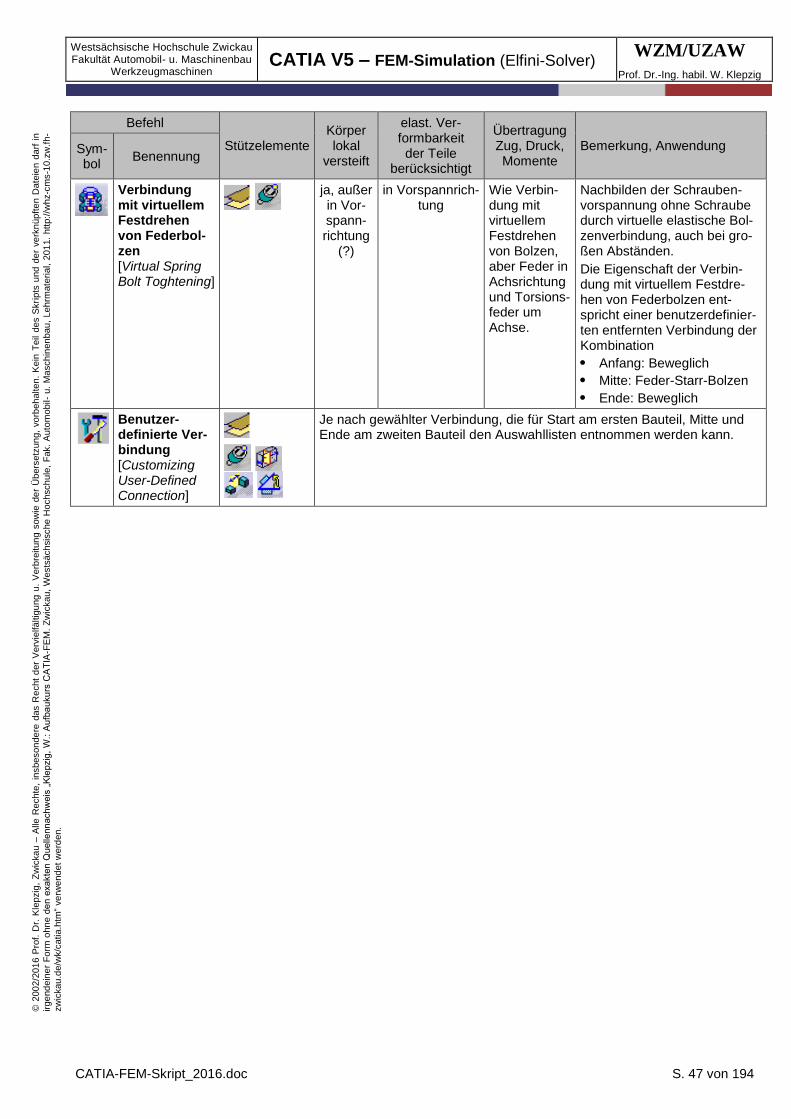
Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 47 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Befehl
Stützelemente Körper lokal
versteift
elast. Ver- formbarkeit der Teile
berücksichtigt
Übertragung Zug, Druck, Momente
Bemerkung, Anwendung Sym- bol
Benennung
Verbindung mit virtuellem Festdrehen von Federbol-zen [Virtual Spring Bolt Toghtening]
ja, außer in Vor-spann-richtung
(?)
in Vorspannrich-tung
Wie Verbin-dung mit virtuellem Festdrehen von Bolzen, aber Feder in Achsrichtung und Torsions-feder um Achse.
Nachbilden der Schrauben-vorspannung ohne Schraube durch virtuelle elastische Bol-zenverbindung, auch bei gro-ßen Abständen.
Die Eigenschaft der Verbin-dung mit virtuellem Festdre-hen von Federbolzen ent-spricht einer benutzerdefinier-ten entfernten Verbindung der Kombination
Anfang: Beweglich
Mitte: Feder-Starr-Bolzen
Ende: Beweglich
Benutzer-definierte Ver-bindung [Customizing User-Defined Connection]
Je nach gewählter Verbindung, die für Start am ersten Bauteil, Mitte und Ende am zweiten Bauteil den Auswahllisten entnommen werden kann.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 48 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
7 Lastbedingungen
CATIA-Hilfe \estug.pdf > „Lasten“
Die Belastungsrandbedingungen lassen sich direkt auf die Bauteilgeometrie beziehen oder sie
werden über angrenzende Bauteile bzw. virtuelle Elemente eingeleitet.
Zu unterscheiden sind die Knotenlasten (Tabelle 9) und die Elementlasten (Tabelle 10).
Knotenlasten führen zu Spannungsüberhöhungen an den Einleitungsknoten. Elementlasten wer-
den gleichmäßig auf die Elemente aufgeteilt, wodurch unrealistische Spannungsspitzen vermie-
den werden können.
Aufgeprägte translatorische Verschiebungen sowie Temperaturdifferenzen bzw. räumliche Tem-
peraturverteilungen lassen sich mit den Befehlen nach Tabelle 11 erzeugen. Die daraus resultie-
renden Verformungen und Spannungen können dann berechnet werden.
Die nachfolgenden Lastvarianten entsprechen R14. Zusätzliche kombinierte Lasten und Massen
sowie Masseverteilungen bietet CATIA ab R16.
Tabelle 9: Knotenlasten
Befehl
Stützelemente Last-ein-
leitung Bemerkung, Anwendung Sym-
bol Benennung
Druck [Pressure] Fläche, Flächengrup-pe
Kn
ot
en
la
st
en
Belastung normal auf die Fläche
Verteilte Last [Distributed Force]
Punkt, Kante, Fläche, Gruppe, virtuelles Teil
Vektorielle Ausrichtung der Kraft, Knotenkraft, un-
gleichmäßige Lastverteilung über Stützgeometrie Spannungsspitzen an den Elementrändern
Moment [Moment]
Kante, Fläche, Grup-pe, virtuelles Teil
Vektorielle Ausrichtung des Moments, Verteilung auf
die Knoten Spannungsspitzen an den Element-rändern
Lagerlast [Bearing Load]
Zylindrische Flächen Aufteilung der Kontaktkraft auf einen Winkelsektor mit vorgegebener Profilverteilung
Importierte Kraft [Imported Force]
Kante, Fläche, Punkt- o. Flächengruppe
Benutzerdefinierte Verteilung der Last in einer Excel- (*.xls) oder Textdatei (*.txt) . Aufteilung auf nächst-
liegende Knoten Knotenkraft mit Spannungserhö-hung an den Elementrändern.
Importiertes Mo-ment [Imported Moment]

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 49 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Tabelle 10: Elementlasten
Befehl
Stützelemente Last-ein-
leitung Bemerkung, Anwendung Sym-
bol Benennung
Linienlast [Line Force]
Kante, Liniengruppe
El
em
en
tl
as
te
n
Gleichmäßige Aufteilung auf die Kanten eines Ele-mentes.
Flächenlast [Surface Force]
Fläche, Flächengrup-pe
Gleichmäßige Aufteilung auf die Elemente unter der Belastungsfläche. Für Schnee-, Windlasten u. a., weil im Gegensatz zum Druck die Richtungen vor-gegeben werden. Importieren von Lastverteilungen
Dichte der Kraft [Force Density]
Kante, Fläche, Körper Automatische Umrechnung in Linienlast o. Flächen-last, gleichmäßige Lastverteilung auf Bezugsgeo-metrie.
Körperkraft [Volume Force]
Körper Aufteilung der Kraft auf Körper, Importieren von Lastverteilungen
Beschleunigung [Gravity]
Körper Gewichtskraft durch Eigenmasse mit Fallbeschleu-nigung, allgemeine Massenkräfte.
Zentrifugale Last [Rotation Force]
Körper Fliehkraft bei Drehung um gewählte Achse.
Tabelle 11: Spannungen durch Verformungen und Temperaturfelder
Befehl
Stützelemente Bemerkung, Anwendung Sym- bol
Benennung
Erzwungene Ver-schiebung [Enforced Dis-placement]
Bauteillagerung (Tabelle 3)
Verschiebungen (und Rotationen) können nur in Richtung entzogener Freiheitsgrade aufgebracht werden. Rotationswin-kel führen aber nicht zur Bauteilverdrillung (Stand R16), sind also z. Z. nutzlos.
Temperaturfeld [Temperature Field]
Körper, Netzbereiche Berechnung von temperaturbedingten Verformungen und Spannungen. Entweder konstante Temperatur für Körper ein-geben, z. B. Temperaturdifferenz Welle/Nabe, oder 3D-Temperaturverteilung mittels „Datenzuordnung“.
Beispiele:
Ana13_Primitvpleuel-Reihe.CATAnalysis einige Minuten mit TE10-Elementen, davon die längste
Zeit für Kontaktberechnungen.
3 Varianten:
Vorzugsweise gem. Variante 3 mit Kontaktverbindungen und Lagerung bzw. Lasteinleitung
über Kurbelzapfen und Kolbenbolzen modellieren. Zum Reduzieren der Rechenzeit ggf. im
Pleuelfußlager Gleitverbindung statt Kontaktverbindung (Vgl. auch Minimalmodell 14.3 Bei-
spielmodell Knickberechnung Pleuel).
Falls Ressourcen unzureichend, dann Variante 1 mit kleiner integrierter Einspann-Hilfsfläche
und gleichgroßen, entgegen gerichteten Lagerlasten im Pleuelauge und -fuß. Spannungen
und Verformungen in den Lagerbohrungen werden aber unzureichend abgebildet.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 50 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Variante 2 mit Krafteinleitung über virtuelle Kontaktteile modelliert die Spannungen und Ver-
formungen in den Lagerbohrungen unreal.
Die Pleuelbaugruppe Ana14_Pleuelbgr1_TE10_Kontaktv_Gleitv.CATAnalysis Bild 48 mit Lager-
schalen und Schrauben sowie Scheiben zum Verschrauben des Pleuelfußes erfordert mit para-
bolischer Vernetzung relativ lange Rechenzeit, obwohl viele Kontaktstellen durch eine fixierte
Verbindung statt der realeren, aber lange Rechenzeiten bedingenden Kontaktverbindung model-
liert wurden.
Bild 48: Von Mises-Spannungen der Pleuelbaugruppe bei 30 kN Belastung
Eine Kontaktverbindung befindet sich zwischen Kolbenbolzen und Kolbenaugenbuchse. Kurbel-
zapfen/Lagerschalenhälften sind zur Abkürzung der Rechenzeit als Gleitverbindungen ausge-
führt. Die größte Spannung tritt an der Kante der Pleuelaugenbuchse auf. Die von CATIA auto-
matisch generierten Netzgrößen wurden beibehalten. Für genauere Berechnungen ist sicher ei-
ne etwas feinere Vernetzung geboten.
Im Bild 48 sind die Maximalspannungen neben den Bauteilen Pleuelfuß, Pleuelschraube, Kol-
benbolzen und Lagerschale Pleuelauge angegeben, wenn im Fenster Bildbearbeitung nur das
jeweilige Teil ausgewählt wird.
Die Größe der bildlichen Darstellung von Verformungen kann mit dem Symbol Größe der
Erweiterung [Amplification Magnitude] gesteuert werden, wie auf Seite 23 bereits beschrieben.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 51 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
8 Modellieren von Federn
1. Lagerfederung:
Einfügen starres oder bewegliches virtuelles Teil
mit Feder (bewegliches versteift Struktur im Unter-
schied zum starren virtuellen Teil nicht) [Rigid or
Smooth Spring Virtual Part].
Mantelfläche als Stützelement [Support].
Lagermittelpunkt als Steuerroutine [Handler].
Federzahlen festlegen.
Feste Einspannung der Feder.
Bild 49: Starres virtuelles Teil mit Feder als Lagerung mit Versteifung der Lagerstelle
2. Feder zwischen zwei Bauteilen:
Analyse allgemeiner Verbindungen , Stützflächen der beiden Teile selektieren.
Falls schon Netz erzeugt, Stützflächen an den Körpern im Bereich Verdeckt selektieren.
Benutzerdefinierte ferne Verbindung, Mitte Starr – Feder – Starr [User-defined Connection
Property, Start: Smooth, Middle: Rigid– Spring – Rigid, End: Smooth], als Vorzugsvariante.
Bild 50: Feder zwischen Bauteilen
Stützelemente: Analyseverbindung im Baum selektieren.
Mitte rechtes Schraubenschlüsselsymbol Eingabefenster für Federzahlen.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 52 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Weniger günstige Alternative ist fixierte Federverbindung [Fastened Spring Connection Pro-
perty] (Bild 51), weil nur kleine Abstände überbrückt werden können.
Bild 51: Fixierte Federverbindung

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 53 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
9 Sensoren
CATIA-Hilfe \estug.pdf > „Sensoren“
Beim Start eines Analyseprozesses, z. B. des statischen Prozesses, wird der Baumzweig Senso-
ren erzeugt. RMT auf Sensoren > Auswahlfenster, je nach bereits berechneten Lösungen.
Globale Sensoren, z. B. Eigenfrequenzen, Fehler bei der Energie, Masse, max. Abweichung,
usw.
Lokale Sensoren (Bild 52), erst nach Berechnung/Aktualisierung des Sensoren verfügbar.
Reaktionssensoren (Bild 53), nur für statische Lösungen, anwendbar auf Randbedingungs-
und Verbindungseigenschaften (ausgenommen Punktschweiß- und Nahtschweißverbindun-
gen). Insbesondere zum Bestimmen der Lagerungskräfte und –momente geeignet.
1. Beispiel Lokaler Sensor Rotationsvektor zum Bestimmen der Drehwinkel einer Geomet-
rie.
Startmodell öffnen Drehwinkel_Feder.CATPart.
Bewegliches virtuelles Teil mit Feder
[Smooth Spring Virtual Part], Stütze-
lemente: Stirnfläche des Zylinders in
xy-Ebene, Steuerroutine: Punkt.1
Steuerroutine Feder, Federzahlen (Versteifungen) gem. Bild
54.
Feste Einspannung des beweglichen virtuellen Teils.
Moment auf Zylinderstirnfläche, Vektor des Moments um
z-Achse 2 Nm.
Bewegliches virtuelles Teil auf obere Stirnfläche, Punkt.2 für
Rotationsvektor als Steuerroutine.
Bild 54: Federzahlen für Zylinderlagerung
Bild 52: Lokale Sensoren
Bild 53: Reaktionssensoren

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 54 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Berechnen Alle.
Abweichung [Displacement] anzeigen lassen.
RMT auf Baumzweig Sensoren > Lokalen Sensor erzeugen [Create Local Sensor] > Rotati-
onsvektor [Rotation Vector].
Der Sensor wird im Baum mit gelbem Ausrufezeichen angezeigt. Er ist also noch nicht gültig
und muss erst bearbeitet werden. LMT-Doppelklick auf Rotationsvektor im Baum > Fenster
Lokaler Sensor ähnlich Bild 55.
Als Stützelement Punkt.2 für Rotationssensor wählen. Das funktioniert nur, weil dieser
Punkt Steuerroutine eines virtuellen Teils ist.
Komponente: Alle.
Nachbearbeitung [Post-Treatment]: Kein [None] > Ergebnisse werden im Baum angezeigt,
wenn Parameter erzeugen gewählt ist.
Parameter erzeugen (R14 Parameter erzeugen: Wahr).
RMT auf Sensor >Aktualisieren.
In der Regel werden die Zylinderkoordinaten auf ein Benutzerkoordinatensystem mit Ursprung im
Punkt = Steuerroutine bezogen.
Ana15_Drehwinkel_Feder_bewegl_virtTeil_Rotvektor.CATAnalysis
2. Beispiel Verschiebungsvektor in Zylinderkoordinaten mit Formel in Drehwinkel umrech-
nen.
Startmodell öffnen Drehwinkel_Feder.CATPart.
Bewegliches virtuelles Teil mit Feder, Stützelemente: Stirnfläche des Zylinders in xy-Ebene,
Steuerroutine: Punkt.1 Steuerroutine Feder, Versteifungen gem. Bild 54.
Feste Einspannung des beweglichen virtuellen Teils.
Moment auf Zylinderstirnfläche, Vektor des Moments um z-Achse 2 Nm.
Abweichung [Displacement] anzeigen lassen.
Abweichung, Verschiebungsvektor Translationsverschiebungsvektor.
Definition: > Darstellung: z. B. Symbol > Mehr>> > Achsensystem: Zylindrisch, global o.
lokal, Komponente: Alle Verformungsvektor zeigt rotatorische Verschiebung am jeweili-
gen Radius an.
RMT auf Baumzweig Sensoren > Lokalen Sensor erzeugen > Verschiebungsvektor.
LMT-Doppelklick auf Verschiebungsvektor im Baum > Fenster Lokalen Sensor definieren, z.
B. auf Kante. Einstellungen gem. Bild 55. Stirn- o. Mantelfläche sind ebenfalls möglich.
Benutzerparameter Typ Winkel definieren und Formel zuweisen, entweder im Finiten Ele-
mentmodell oder im Part, z. B. mit aktiviertem Part.
Verdrillungswinkel = ‚Externe Parameter\Verschiebungsvektor’/Zylinderradius * 180deg/PI
Anzeige des Verdrehwinkels in Grad im Part-Verzeichnis Parameter.
Ana16_Drehwinkel_Feder_Verschiebungsvektor_Formel.CATAnalysis

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 55 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 55: Lokaler Sensor auf Flächenkante für Verschiebung im zylindrischen Koordinaten-system, links R14, rechts R20.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 56 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
10 Anwendungsbeispiel Hauptspindel
Beispiel Verformung und Verlagerung der Hauptspindel einer Drehmaschine.
Baugruppe mit Verschraubung, unter Berücksichtigung der Lage des Spindelantriebs.
Einzelteile Spindelflansch, Futterkörper, Spannbacken usw. vereinfacht als ein Teil model-
liert.
Drehmeißel ist nicht erforderlich, nur zur optischen Darstellung für Erklärung genutzt.
Startmodell:
BgrHauptspindel1_Futter_Wst_Wz_weicheLager.CATProduct
Statikanalyseprozess starten.
10.1 Vernetzung
Automatische CATIA-Vernetzung, die manchmal etwas unterschiedlich ausfällt, modifizieren.
Zunächst lineare Netze, grob für kurze Rechenzeit, teilweise keine Durchhangvorgaben.
Bauteil Netzgröße Durchhang lokale Netze Bemerkung
Spindel 25 mm kleiner als CATIA
Bodenrad 16,6 mm 2,656 mm wie CATIA
Futter 17,48 mm wie CATIA
Werkstück 25 mm größer als CATIA
Schrauben 7,262 mm 1,162 mm wie CATIA
10.2 Federnde Lagerungen
Vorn Radial-Axiallager, hinten Radiallager. Deshalb vorn „starres virtuelles Teil mit Feder“,
weil der vordere Lagersitz durch die Lagerverspannung relativ stark versteift wird, und hinten
„bewegliches virtuelles Teil mit Feder“. Als Stützelemente die jeweiligen Mantelflächen der
Lagersitze wählen (vorn Bild 56), als Steuerroutine die violetten Steuerpunkten auf der Spin-
delachse.
Lagersteifen gem. Parametern, Unterordner Optimierungsparameter im Steuerteil mittels
Formeleditor zuweisen (vorn Bild 56). Dazu RMT in das Eingabefeld der Werte > Formel be-arbeiten. Danach steht f(x) hinter dem Wert. LMT-Klick auf f(x) öffnet den Formeleditor.
Vorn: 1. Verschiebung = Steife_Axiallager_vorn, 2. und 3. Verschiebung = Lagerstei-
fe_vorn, Versteifung der 2. und 3. Rotation = Winkelsteifigkeit_Lager_vorn.
Hinten: 2. und 3. Verschiebung = Lagersteife_hinten, gegen Festkörperverdrehung im hin-
teren Lager nur Versteifung der ersten Rotation mit 1e+009Nxm_rad.
Feste Einspannungen der Lagerfedern.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 57 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 56: Für vorderes Lager in x-Richtung mit Formeleditor Steife des Axiallagers zuweisen
10.3 Analyseverbindungen definieren
Analyse allgemeiner Verbindungen einfügen für
Spannbacken – Werkstück,
Kurzkegel,
Stirnflächen Futter-Spindel (diese Bedingung + Kurzkegel führt bei Baugruppenbedingungen
zur Überbestimmung!),
Stirnfläche Schraubensenkung – Schraubenkopf, 4x,
Gewinde Schraube – Spindelflansch, 4x,
Mitnehmerbohrungen.
10.4 Verbindungen definieren
Presspassung Bodenrad – Spindel, Stützelement Baugruppen-Kongruenzbedingung, Über-
lappung 0,01 mm.
Bild 57: Presspassverbindung zwischen Hauptspindel und Bodenradbohrung
Presspassung Wst – 4 Spannbackenflächen, Stützelement Analyseverb. Backen – Werk-
stück, Überlappung 0,01 mm.
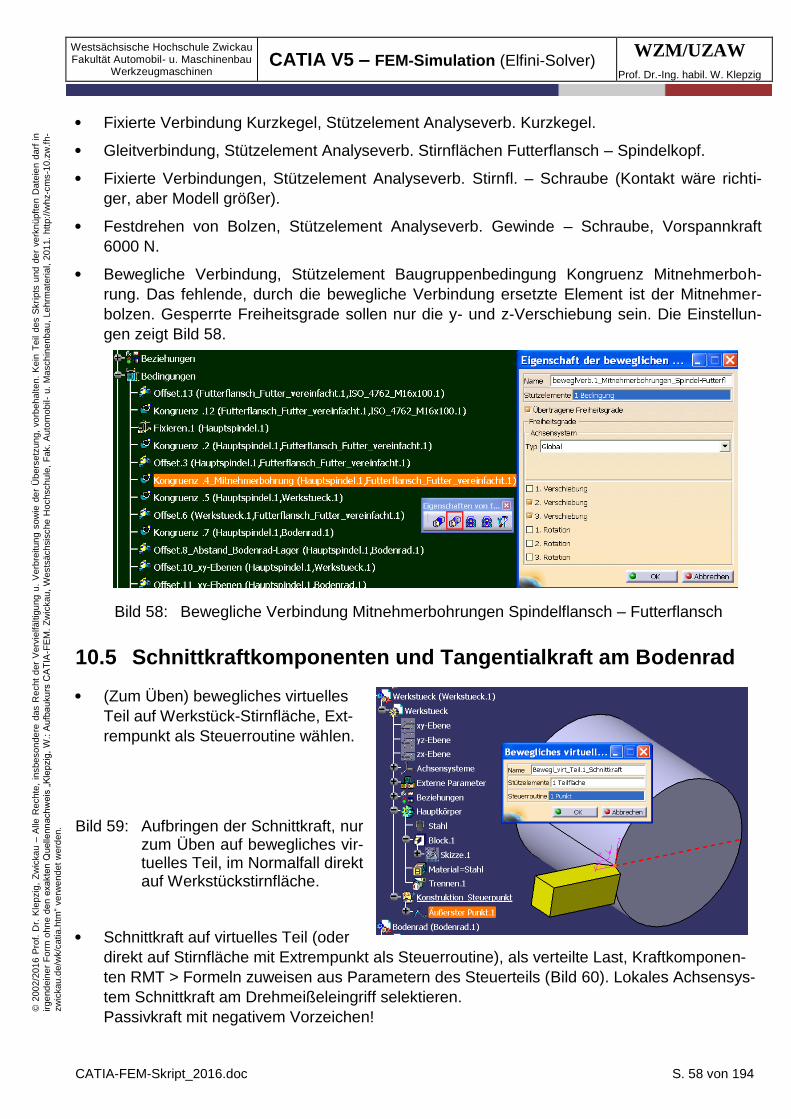
Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 58 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Fixierte Verbindung Kurzkegel, Stützelement Analyseverb. Kurzkegel.
Gleitverbindung, Stützelement Analyseverb. Stirnflächen Futterflansch – Spindelkopf.
Fixierte Verbindungen, Stützelement Analyseverb. Stirnfl. – Schraube (Kontakt wäre richti-
ger, aber Modell größer).
Festdrehen von Bolzen, Stützelement Analyseverb. Gewinde – Schraube, Vorspannkraft
6000 N.
Bewegliche Verbindung, Stützelement Baugruppenbedingung Kongruenz Mitnehmerboh-
rung. Das fehlende, durch die bewegliche Verbindung ersetzte Element ist der Mitnehmer-
bolzen. Gesperrte Freiheitsgrade sollen nur die y- und z-Verschiebung sein. Die Einstellun-
gen zeigt Bild 58.
Bild 58: Bewegliche Verbindung Mitnehmerbohrungen Spindelflansch – Futterflansch
10.5 Schnittkraftkomponenten und Tangentialkraft am Bodenrad
(Zum Üben) bewegliches virtuelles
Teil auf Werkstück-Stirnfläche, Ext-
rempunkt als Steuerroutine wählen.
Bild 59: Aufbringen der Schnittkraft, nur zum Üben auf bewegliches vir-tuelles Teil, im Normalfall direkt auf Werkstückstirnfläche.
Schnittkraft auf virtuelles Teil (oder
direkt auf Stirnfläche mit Extrempunkt als Steuerroutine), als verteilte Last, Kraftkomponen-
ten RMT > Formeln zuweisen aus Parametern des Steuerteils (Bild 60). Lokales Achsensys-
tem Schnittkraft am Drehmeißeleingriff selektieren.
Passivkraft mit negativem Vorzeichen!

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 59 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 60: Verteilte Last am Drehmeißeleingriffspunkt, hier auf virtuelles Teil mittels Formeln
Antriebstangentialkraft als verteilte Last auf
kleiner Fläche des Bodenrades, lokales Ach-
sensystem, Tangentialkraft mit Formel aus Pa-
rameter des Steuerteils.
Bild 61: Tangentialkraft am Bodenrad
Zwischenstand gespeichert in AnaH1_vollst_mitSchrauben_linNetze_weicheLager.CATAnalysis

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 60 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
10.6 Sensoren und Ergebnisse
Vor dem Erzeugen von Sensoren muss eine FEM-Berechnung durchgeführt worden sein.
Startmodell ist die Hauptspindelbaugruppe mit federnden Lagern, Kopplungs- und Lastbedin-
gungen:
AnaH2_vollst_mitSchrauben_linNetze_Lagerbuchsen_weich.CATAnalysis.
Reaktionssensoren am vorderen und hinteren Lager
Im Baumzweig Statischer Prozess RMT auf Sensoren > Re-
sultierenden Sensor erzeugen > Reaktionssensor erzeugen
> Feste Einspannung.1 Lager hinten; analog für Lager vorn.
Bild 62: Reaktionssensor für Lagerstelle
Die Sensoren im Baum haben noch das gelb-schwarze Aktualisierungszeichen > RMT auf
Sensor(en) > Sensor(en) aktualisieren.
Nach dem Aktualisieren können bei R14 mit einem Dop-
pelklick auf den Reaktionssensor die Lagerreaktionen
angezeigt werden. Bei späteren Releases werden die
Lagerreaktionen im Baum angezeigt.
Bild 63: Lagerreaktionen (R14)
Die angezeigten Momente errechnen sich aus Lagerkraft(komponente) x Abstand zum Ursprung des
Referenzachsensystems, im Bild 63 zum globalen Achsensystem in der Mitte der vorderen Lager-
stelle. Es sind in diesem Fall also nicht die an der Lagerstelle aufgenommenen Momente.
Lokaler Sensor Verschiebungsgröße am Drehmeißeleingriffspunkt
RMT auf Sensoren > Lokalen Sensor erzeugen > Verschiebungsgröße.
Doppelklick auf Sensor Verschiebungsgröße im Baum > Fenster Lokaler Sensor zum Defi-
nieren der Eigenschaften.
Stützelement: Äußerster Punkt (Extrempunkt) im Ursprung des Achsensystems Schnittkraft,
Filter anzeigen: Alle,
Nachbearbeitung: Maximum (Wert wird im Baum und an der Geometrie angezeigt),
Parameter erzeugen (R14 Wahr).
RMT auf Sensor Verschiebungsgröße im Baum > Sensor aktualisieren.
Lokaler Sensor Verschiebungsvektor am Drehmeißeleingriffspunkt
RMT auf Sensoren > Lokalen Sensor erzeugen > Verschiebungsvektor.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 61 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Doppelklick auf Sensor Verschiebungsvektor im Baum > Fenster Lokaler Sensor zum Defi-
nieren der Eigenschaften.
Bild 64: Lokaler Sensor Verschiebungsvektor
Stützelement: Äußerster Punkt (Extrempunkt) im Ursprung des Achsensystems Schnittkraft.
Filter anzeigen für: Alle.
Achsensystem: Klick auf Schalter … > Fenster Bildachsensystem > Typ umstellen von
Global auf Benutzer und dann Achsensystem_Schnittkraft anklicken.
Komponente: C2 – zeigt nur y-Verformungsvektor in Richtung der Passivkraft an, meist Alle
informativer.
Nachbearbeitung: Kein – Anzeige der 3 Verschiebungsvektoren im Baum.
Maximum – zeigt nur den Maximalwert aus der vektoriellen Addition im Baum und an der
Geometrie, bei Komponenten Alle also die bereits schon als Sensor angezeigte Verschie-
bungsgröße.
RMT auf Sensor Verschiebungsvektor im Baum > Sensor aktualisieren, dann werden die
Verschiebungsvektoren im Baum angezeigt.
Ergebnis der FEM-Berechnung mit linearer Vernetzung:
AnaH3_Erg_vollst_mitSchrauben_linNetze_weicheLager.CATAnalysis
Ergebnis der FEM-Berechnung mit parabolischer Vernetzung:
AnaH4_Erg_vollst_mitSchrauben_parabNetze_weicheLager.CATAnalysis
Alle
Kein

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 62 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
11 Parameteroptimierung mit der Knowledgeware Product Engineering Optimizer PEO
CATIA-Hilfe \kwoug.pdf > „Optimierung“
bzw. …\B19doc\German\online\German\CATIAfr_C2\kwougCATIAfrs.htm
11.1 Voreinstellungen für PEO
Tools > Optionen >
Allgemein > Parameter und Messungen >Registerkarte Ratgeber:
Strukturbaumansicht Parameter Mit Wert, Mit Formel
Beziehungsaktualisierung im Teilekontext Erzeugung synchroner Beziehungen.
Infrastruktur > Teileinfrastruktur >
Registerkarte Allgemein: Aktualisieren Automatisch,
Registerkarte Anzeige: Im Strukturbaum anzeigen alles auswählen.
Mechanische Konstruktion > Assembly Design > Registerkarte Allgemein:
Aktualisieren Automatisch,
Exakten Aktualisierungsstatus beim Öffnen … Automatisch.
Analyse & Simulation >
Registerkarte Externer Speicher:
z. B. wie im Bild 65.
Bild 65: Optionen Analyse & Simulation, Registerkarte Externer Spei-cher
Registerkarte Allgemein: Strukturbaum
Parameter anzeigen,
Beziehungen anzeigen. (Unter Beziehungen können dann die Optimierungen selektiert
werden.)

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 63 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
11.2 Optimierungsalgorithmen
„Derivat“ ist ein abgeleitetes Objekt, bei CATIA z. B. abgeleitete Werte von Analysesensoren /3/,
S. 31, 46. Hinweis/3/, S. 47: Doppelte reelle Genauigkeit für Sensor wählen.
Simuliertes Ausglühen: „Wenn die Form der objektiven Funktion nicht bekannt ist, empfiehlt es sich, mit dem Modus für simuliertes Ausglühen zu beginnen und erst danach die Ergebnisse mit einem Gradientenabstieg einzugrenzen. Dieses Verfahren ist zwar langsamer, kann aber auf eine größere Anzahl Funktionen angewen-det werden.“ /3, S. 30/
Algorithmus für Gradienten: „Dieser Algorithmus muss zuerst zur Ausführung einer lokalen Suche verwendet werden. Basierend auf der Berechnung einer lokalen Steigung der objektiven Funktion verwendet dieser Algo-rithmus eine parabolische Näherung und springt zu seinem Minimum, oder er verwendet einen iterierten expo-nentiellen Schritt absteigend in Richtung des Minimums. Wenn die Eigenschaften der objektiven Funktion be-kannt sind (fortlaufend, an jedem Punkt differenzierbar), kann der Gradient ohne weitere Vorbereitung verwen-det werden. Er läuft in der Regel schneller ab als der Algorithmus für simuliertes Ausglühen (Simulated Anneal-ing - SA).“ /3, S. 32/
Konvergenzgeschwindigkeit /3, S. 32/:

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 64 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Algorithmen und die jeweils unterstützten Funktionen /3, S. 33/:
Lokaler Algorithmus für Bedingungen und Prioritäten sucht nur dicht um Ausgangswerte, z. B.
um Ergebnis des simulierten Ausglühens.
„Von Zeit zu Zeit werden die PEO-Algorithmen aktualisiert, um deren Leistungsfähigkeit zu verbessern. Als Ne-beneffekt zu diesen Modifizierungen ändert sich das Verhalten des Optimierungsprozesses.“ /3, S. 33/
11.3 Beispielmodell Hauptspindel
Ziel: Minimale statische Verformung am Arbeitspunkt der Hauptspindel bzw. am Drehmeißelein-
griff des Werkstückes durch Optimierung der Größen
Lagerabstand,
Abstand des Bodenrades vom vorderen Lager,
Winkels der Lage des Antriebszahnrades.
Wegen der sehr langen Rechenzeiten u. U. zunächst Groboptimierung mit linearer Vernetzung
rechnen. Danach soll um das gefundene Optimum mit eingeschränkten Parameterbereichen ei-
ne genauere Berechnung mit parabolischer Vernetzung erfolgen.
R14-Startmodell mit Verformungssensoren:
AnaH5_PEOStart_R14.CATAnalysis
Start > Knowledgeware > Product Engineering Optimizer .
Einfügen einer Optimierung > Fenster Optimierung Bild 66.
Zunächst Optimierung nur nach einer Zielgröße durchführen im Abschnitt 11.3.1, dann Optimie-
rung durch Vorgabe von zwei Bedingungen mit unterschiedlicher Wichtung im Abschnitt 11.3.2.
Bei der Definition von Bedingungen muss beachtet werden, dass nicht für jeden Optimierungsal-
gorithmus Gleichheit (Zeichen ==) zulässig ist, z. B.
’Finites Elementmodell.1\Verschiebungsgröße.1\Verschiebungsgröße’ == 0 mm.
Durch Verwenden von Ungleichheitsbedingungen kann das umgangen werden, z. B.
abs(’Finites Elementmodell.1\Verschiebungsgröße.1\Verschiebungsgröße’/1mm) <= 0.0001.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 65 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Im Diagramm kann nur der Abstand zur Grenzgröße der Bedingung (Abstand bis Erfüllung) dar-
gestellt werden. Deshalb die Grenzgröße ggf. sehr klein wählen, damit der Abstand nahezu iden-
tisch mit der Verschiebungsgröße ist.
11.3.1 Minimierung der Verformung in Richtung der Passivkraft
Wegen kurzer Rechzeit zum Üben zunächst lineare Tetraederelemente nutzen.
Weil unbekannt ist, nach welcher Funktion sich die Verformung am Drehmeißeleingriffspunkt
verändert, mit dem Optimierungsalgorithmus simuliertes Ausglühen (SA Simulated Annealing) für
stochastische Suche beginnen. Er geht am Ende in eine lokale Suche über.
Optimierungstyp: Zielwert. Auswählen der Zielgröße Verschiebungsvektor C2 entweder im Aus-
wahlfenster oder meist zweckmäßiger im Baumzweig Sensoren.
Je nach Startparametern sind unterschiedliche Ergebnisse möglich. Das wird insbesondere beim
Antriebswinkel deutlich.
Minimierung bedeutet Maxi-mum der negativen Werte, deshalb Optimierungstyp „Ziel-wert“ wählen.
Bild 66: Simuliertes Ausglühen mit Beendigungskriterien und Auswahl der Zielgröße
Zielwert

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 66 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Freie Parameter und deren Bereiche sowie ggf. Schrittweiten festlegen> Liste bearbeiten
Zweckmäßig im Steuerteil, Baumzweig Optimierungsparameter selektieren.
Bild 67: Freie Parameter auswählen
Bild 68: Bereiche und Schrittweiten festlegen (auch nach Doppelklick auf Listeneintrag)
Freier Parameter Unterbereich Oberbereich Schritt
Lagerabstand f(x) minimaler Lagerabstand 600 mm 30 mm
Bodenradabstand 0 mm f(x) maximaler Bodenradabstand 25 mm
Antriebswinkel 0 deg (-180 deg) 360 deg (180 deg) 15 deg
Die Parameter minimaler Lagerabstand und maximaler Bodenradabstand sind im Steuerteil, Pa-
rameter, Optimierungsparameter definiert.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 67 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Optimierungsdaten sichern Ergebnisse der Berechnungsschritte werden in eine Exceldatei
geschrieben.
Optimierung ausführen nicht versehentlich OK !!!
Ergebnisse der Berechnungen anzeigen lassen.
Bild 69: Ergebnisse der Berechnungen in Tabellenform
Angezeigte Parameter auswählen ... > Parameter, die mittels Kurven anzeigen ... im Dia-
gramm als Kurven dargestellt werden.
Bild 70: Als Kurven anzuzeigende Parameter auswählen

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 68 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 71: Kurven der Optimierungsschritte
Ergebnis der Optimierung als R17-Modell:
AnaH6_Erg_PEO1lin_R17.CATAnalysis (nach dem Öffnen der Datei im Baum Doppelklick auf
Beziehungen\Optimierungen.1\Optimierung.1 Optimierungsfenster > Register Ergebnisse der
Berechnungen Tabelle mit Zwichenergebnissen > Kurven anzeigen .)
Beispiel einer Excel-Datei mit modifizierter Ergebnistabelle und Diagramm
sonstVkn\HspPEO1_Zielwert_Schnell_Grenzen_keineBeding.xls.
Ggf. anderen Algorithmustyp und/oder eingeschränkte Bereiche der freien Parameter.
Ggf. Optimierung mit parabolischer Vernetzung.
11.3.2 Minimierung der Verformung in Richtung der Passivkraft und in Rich-tung der Hauptschnittkraft als zweite Bedingung
Für die beiden Bedingungen sollen unterschiedliche Wichtungsfaktoren festgelegt werden.
Startmodell:
Entweder AnaH5_PEOStart_R14.CATAnalysis und eine Optimierung einfügen. Die gleichen
freien Parameter definieren wie im Bild 68.
Oder das eigene Ergebnis der PEO1-Optimierung öffnen, alternativ Datei neu aus
AnaH6_Erg_PEO1lin_R17.CATAnalysis. Mit Doppelklick auf die zu modifizierende Optimierung
im Baumzweig Analysemanager/Beziehungen/Optimierungen/
Optimierung.1 öffnet sich das Optimierungsfenster, in dem dann die gewünschten Anpassungen
vorgenommen werden können.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 69 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Im Steuerteil die Optimierungsparameter ggf. etwas modifizieren oder wieder auf die Werte
des Startmodells zurücksetzen (Lagerabstand 425 mm, Abstand Bodenrad 150 mm, Winkel
Tangentialkraft 90°), damit die modifizierte Optimierung nicht gleich mit dem Ergebnis von
PEO1 startet.
Optimierungstyp: Nur Bedingungen.
Bild 72: Registerkarte Problem für Optimierung nach 2 Bedingungen
Algorithmus: Simuliertes Ausglühen.
Ggf. Konvergenzgeschwindigkeit Mittel und Anzahl der Aktualisierungen ohne Verbesserung
auf mehr als 20 erhöhen.
Ohne Darstellung der Aktualisierung > Geometrieveränderungen werden nur am Ende der
Optimierung angezeigt.
Register Bedingungen [Constraints] öffnen (Bild 73).
Neu > Editor für Optimierungsbedingungen.
Bedingung für Verformung C2 in y-Richtung eingeben.
Texteingabe: abs(
Verschiebungsvektor C2 im Baum selektieren,
Texteingabe: /1mm), weil Absolutwerte vom Typ Real sein müssen.
Texteingabe oder aus Datenverzeichnis Operatoren: <=,
Zahlenwert mit Dezimalpunkt: 0.001 mindestens, besser 0.000001,
Wichtungsfaktor / Wertigkeit als „Linienstärke“ eingeben,

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 70 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Genauigkeit 0,00001mm eingeben.
Ggf. modifizierte Namen und Kommentare eingeben.
Bedingung für Verformung C3 in z-Richtung analog eingeben.
Bild 73: Bedingungen definieren für Verschiebungsvektoren C2 und C3
Optimierung ausführen
Ergebnisse anzeigen analog Bild 69 bis Bild 71.
Nach der 1. Optimierung ggf. Doppelklick auf diese Optimierung im Baum und Modifikationen
vornehmen,
z. B. Freie Parameter Bereiche und Schritt bearbeiten : Bereiche einschränken und keine
Schrittweite vorgeben.
Ergebnisdateien:
sonstVkn\AnaH7_PEO3_2Bed_R17_SAMittel_20x.xls

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 71 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
12 Schadensanalyse Druckgehäuse
Das Druckgehäuse bricht im rot gekennzeichneten Bereich, allerdings nicht bei jedem Einsatz-
fall. Es ist eine Spannungsanalyse durchzuführen. Eigentlich wäre dazu ein FEM-Programm er-
forderlich, das nichtlineare Verformungen berechnen kann, wie z. B. CATIA-Simulia/Abaqus oder
ANSYS. Mit dem CATIA-Elfini-Solver für ausschließlich lineares Verformungsverhalten kann nur
eine grobe Abschätzung vorgenommen werden.
Bild 74: Druckgehäuse mit Bruchbereich
Werkstoff des Druckgehäuses:
EN-GJS-500-7 DIN EN 1563: 10/2005 (GGG-50) für t 30 mm,
Zugfestigkeit Rm 500 MPa,
0,2%-Dehngrenze Rp0,2 320 MPa,
Dehnung Amin 7%,
Elastizitätsmodul E 1,69 105 MPa,
Querkontraktionszahl 0,275.
Die Berechnungen erfolgten aber mit den Vorgaben des Herstellers für GGG-50:
E-Modul: 170 000 MPa (gemittelt),
Querkontraktionszahl: 0,285 (gemittelt).
Modelliert wurden verschiedene Verbindungen zwischen Einschraubbuchse und Gehäuse sowie
globale Netzgrößen für das Gehäuse von 10 mm bis zu 5 mm. Für das Praktikum wird nur eine
globale Netzgröße von 8 mm gewählt. Gem. 6.4 haben die Verbindungen folgende Eigenschaf-
ten:
Gleitverbindungen [Slider Connections] übertragen Zug- und Druckkräfte, die elastische Ver-
formbarkeit der Teile wird berücksichtigt.
Fixierte Verbindungen [Fastened Connections] bewirken, dass sich zwei Körper im fixierten
Bereich wie einer verhalten, die elastische Verformbarkeit der Schnittstellen berücksichtigt.
Kontaktverbindungen [Contact Connections] übertragen Druckkräfte, die elastische Verform-
barkeit der Schnittstellen wird berücksichtigt, lange Rechenzeit!
Bewegliche Verbindungen [Smooth Connections] übertragen Zug- und Druckkräfte, die elas-
tische Verformbarkeit der Teile wird berücksichtigt. Nicht modellierte Teile bzw. Abstände
werden überbrückt, allerdings können sich damit auch verformte Netze überlagern.
Die Anschlussrohre mit verschiedenen Einspannbedingungen hatten kaum Einfluss auf den
bruchkritischen Bereich des Druckgehäuses. Als Hauptproblem hinsichtlich der Modellierung er-
wies sich die Verbindung zwischen Einschraubbuchse und Gehäuse. Wenn die Verklebung nicht

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 72 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
absolut dicht ist und sich deshalb in den „Gewindegängen“ (durch Flächen vereinfacht) der Öl-
druck aufbauen kann, treten extrem hohe Spannungen im Bereich der kritischen 6 mm-Bohrung
(violett im Startmodell) auf. Um das darzustellen, muss der Öldruck außer auf die beiden Flä-
chengruppen zusätzlich auf die geklebten Gewindebereiche von Buchse und Gehäuse wirken.
Für das Praktikum erfordert die parabolische Vernetzung eine viel zu lange Rechenzeit. Deshalb
kann im Praktikum nur mit linearer Vernetzung gerechnet werden. Es muss aber klar sein, dass
die wirkliche Spannungsanalyse nur mit TE10-Vernetzung zu sinnvollen Ergebnissen führt.
Startmodell als Halbschnitt:
Bgr_Druckgeh_Rohre_Halbschnitt_R17.CATProduct
Netze modifizieren, zunächst lineare Vernetzung (TE4-Elemente).
Gehäuse Netzgröße 8 mm,
lokale Netzgröße 3 mm für
7 Flächen (6 hellblau, 1
beige),
lokale Netzgröße 1 mm für
4 Bohrungsflächen(1 violett,
1 rotbraun, 2 grün).
Ggf. weitere Bohrungen
feiner vernetzen.
Bild 75: Lokal kleinere Netz-größen des Gehäuses
Bei der globalen Netzgröße von 8 mm werden einige Bohrungen und Verrundungsradien nur
sehr grob angenähert. Nach dem Vernetzen kommt eine Netzwarnung, dass der Durchhang
nicht eingehalten wird keine Durchhanggröße vorgeben oder kleine Teilflächen lokal fei-
ner vernetzen, falls die Rechnerressourcen das erlauben.
Einsatzbuchse gem. automatischer CATIA-Vernetzung, aber geklebter Gewindebereich
(beige) lokal 3 mm.
Randbedingungen (Bild 76).
Feste Einspannung der Stirnfläche des Einlassrohres (alternativ beide Rohre).
Benutzerdefinierte Randbedingung für die Stirnfläche des Auslassrohres, nur 3. Verschie-
bung in z-Richtung freigeben (3. Rotation kann eigentlich auch freigegeben werden).
Feste Einspannung der Anschraubfläche des Gehäuses.
bei Netzwarnung inaktivieren

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 73 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 76: Randbedingungen
Flächenloslager auf alle 12 Schnittflächen der y-z-Ebene (Gehäuse, Einschraubbuchse,
beide Rohre).
Flächengruppen erzeugen
27 Druckflächen Gehäuse ohne Einschraubbuchsengewinde, 20 blaue
Flächen, 3 hellblaue Flächen, violette Bohrungsfläche, rotbraune
Bohrungsfläche, 2 grüne Bohrungsflächen (Einschraubbuche verdecken),
5 Druckflächen Buchse ohne geklebtes Gewindestück, blaue Flächen gruppieren (Ein-
schraubbuchse anzeigen, Gehäuse verdecken).
Verbindungen
Analyse allgemeiner Verbindungen auf die geklebten Gewindebereiche von Einschraub-
buchse (violette Fläche) und Gehäuse (beige Fläche), dazu Buchse und Gehäuse abwech-
selnd verdecken/anzeigen.
Auf diese Analyseverbindung eine Gleitverbindung bei einer wieder lösbaren Verklebung
(Loctite). Alternativ könnte auch eine fixierte Verbindung bei einer festen Verklebung wie
bei einer Schweißverbindung gewählt werden.
Gleitverbindung zwischen Buchsenbund und Gehäuse, dazu als Stüt-
zelement die Baugruppenbedingung Offset.9 … wählen.
Zwischen Rohren und Gehäuse zwei ferne Verbindungen, Typ Eigenschaft der bewegli-
chen Verbindung, erzeugen. Als Stützelemente werden die Baugruppen-
bedingungen Offset.3 bzw. Offset.4 genutzt.
Druckausgleich durch Längskraft
Weil die von unten in das Gehäuse eingeschraubten Bauteile nicht modelliert sind, wird eine
dem Druck auf diese fehlenden Flächen entsprechende Kraft aufgebracht (Halbkreisfläche).
Dazu werden folgende Schritte vollzogen.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 74 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
In der Baugruppe Innenkante
der unteren Bohrung messen,
Messung anpassen, Messung
beibehalten.
In der Analyse oder in der Bau-
gruppe die Parameter definie-
ren:
Druck p = 15 MPa,
Laengskraft F mit Formel
p2
rF
2
, dabei für r den
gemessenen Radius und für p
den Parameter wählen
F = – 58905 N. Bild 77: Gemessener Radius als Bezugsgröße für Längskraft
Dichte der Kraft [Force Density] auf untere Gehäusestirnfläche, Fy = Laengskraft.
Innendruck p auf Gehäuse und auf Einschraubbuchse Druck [Pressure] , als Stützele-
mente werden die jeweiligen Flächengruppen gewählt.
Zur Überprüfung der Analysemodellierung mit TE4-Elementen berechnen.
Elementtyp auf parabolisch abändern und Spannungen mit TE10-Elementen berechnen.
Bild 78: Maximale Hauptnormalspannung (Hauptspannungstensorkomponente C11) und Ext-remwertanzeige
Für spröde Werkstoffe, wie GGG, ist die größte Hauptnormalspannung maßgebend für das Ver-
sagen. Es kommt zum Trennbruch (Vgl. 5.2!). Deshalb ist nicht die von Mises-Spannung, son-

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 75 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
dern die Hauptspannungstensorkomponente [Principal value > Stress principal tensor compo-
nent] C11 entscheidend. Ob die angezeigten Spannungswerte dem realen Objekt entsprechen
oder wesentlich durch die Netzstruktur und/oder die Randbedingungen bedingt sind, muss durch
Variation der Bedingungen abgeklärt werden.
Ergebnis:
Ana17_DuckgHalbschnitt_R17.CATAnalysis
Am nicht geschnittenen Gehäuse lassen sich die einzelnen Flächen für lokal feinere Vernetzung
und die Flächengruppen für den Innendruck schwieriger selektieren. Deshalb ist es eventuell
hilfreich, in der Umgebung Generative Shape Design GSD die betreffenden Flächen abzuleiten,
um deren Anzahl und Lage zu erfassen.
In der Umgebung GSD die entsprechenden Flächen ableiten , Fortführungstyp: Keine
Fortführung. Durch zwischenzeitliches Verdecken des Hauptkörpers lässt sich gut erkennen,
welche Teilflächen noch nicht abgeleitet wurden. Die Grafikdarstellung der Flächen so dre-
hen, dass die Flächenlücken nach dem Sichtbarschalten des Hauptkörpers leicht nachselek-
tiert werden können.
Im Partdesign PD ggf. den zu den einzelnen Flächengruppen gehörigen Teilflächen am
Hauptkörper eine spezielle Farbe zuweisen.
Eine Variante mit Ergebnissen des nicht geschnittenen Gehäuses mit
parabolischer Vernetzung, globale Netzgröße Druckgehäuse 8 mm,
Druck auf nicht modellierte, unten eingeschraubte Bauteile durch virtuelles Teil mit verteilter
Kraft approximiert.
Ana18_Druckg_ungeschn_2xGleitv_keinDruckGew_R17.CATAnalysis
Daran u. a. üben:
Schnittebenenanalyse (Bild 79)
Abstand messen zwischen z. B. der Bohrungsachse und der Ebene, auf welcher der Kom-
pass positioniert werden soll.
Kompass auf Ebene positionieren, zu welcher der Schnitt parallel verlaufen soll. Dazu erst
Fläche markieren und dann Kompass am roten Punkt auf die markierte Fläche ziehen.
Lösung für statischen Prozess aktivieren, z. B. Hauptwert C11.
Schnittebenenanalyse [Cut Plane Analysis] , Schnittebene nicht anzeigen.
RMT-Klick auf quadratischen, roten Kompasspunkt > Bearbeiten und Verschiebungsinter-
vall eingeben, z. B. Messwert, oder Kompass an der entsprechenden Achse verschieben
bzw. am Kompassbogen drehen.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 76 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 79: Schnittebenenanalyse
Extremwerte anzeigen lassen (Anzeige wird bei Schnittebenenanalyse inaktiviert), z. B.
gem. Bild 80.
Bild 80: Anzeige von Extremwerten
Bild 81: Hauptspannungstensorkomponente C11, links Halbschnitt 1max 252 MPa, rechts unge-
schnittenes Gehäuse mit Schnittebenenanalyse 1max 362 MPa bei Innendruck 15 MPa ohne Gewindebereiche, Gleitverbindungen Gewinde- u. Buchsenanlagefläche.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 77 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Wie der Vergleich zwischen den Hauptnormalspannungen des Gehäusehalbschnittes und des
ungeschnittenen Gehäuses im Bild 81 zeigt, werden im Halbschnittmodell zu kleine Spannungen
berechnet.
Wird die Verbindung der Gewindeflächen als Kontaktverbindung modelliert und der Innendruck
wirkt auch auf die Gewindebereiche, erhöht sich die maximale Hauptnormalspannung in der
6 mm-Bohrung auf 479 MPa.
Bild 82:
Hauptspannung 1max 479 MPa, ungeschnittenes Gehäuse, In-nendruck 15 MPa mit Gewin-debereichen, Gewindeflächen als Kontaktverbindung, Darstel-lung als Schnittebenenanalyse.
Wesentlich größer werden die Modelle mit modellierten Gewindegängen, z. B. das Modell
Ana19_Druckg_ungeschn_Gewinderill_-
BundVorsp0,005mm_Druck_ausserTragflankenGleitv_R17.CATAnalysis.
Der Innendruck von 15 MPa wirkt auch auf die Gewinde von Gehäuse und Buchse mit Ausnah-
me der tragenden Gewindeflanken. Die Anlagefläche zwischen Buchsenbund und Gehäuse ist
als Kontaktverbindung mit einem Gewindevorspannweg 0,005 mm modelliert. Zwischen den tra-
genden Gewindeflanken besteht eine Gleitverbindung. Die maximale Hauptnormalspannung
1max in der 6 mm-Bohrung erreicht 329 MPa (Bild 83). Größere Spannungsspitzen treten an Un-
stetigkeiten des lokal mit 1 mm vernetzten Gewindenetzes auf. Wenn die Rechnerressourcen
das erlauben, könnten die Gewinde lokal mit 0,5 mm besser vernetzt werden.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 78 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 83: Hauptspannungstensorkompo-nente C11 in der kritischen Bohrung bei modellierten Ge-windegängen, Darstellung als Schnittebenenanalyse.
Tabelle 12: Maximale Hauptspannung 1 in der 6 mm-Bohrung bei 15 MPa Innendruck in Abhängigkeit der Modellierung
Gewinde-
modellierung
Verbindungen Innendruck auf
Muttergewinde-
bereich
1max 6 mm-
Bohrung
R17 u. R191 ca. Gewindebereich Anlage Buchse
zylindrische
Flächen
ohne Buchse ja 470
Gleitverbindung Gleitverbindung nein 360
Kontaktverbindung Gleitverbindung ja 480
Kontaktverbindung Kontaktverbindung
- 0,005 mm
ja 480
Gewinderillen ohne Buchse ja 400
Gleitverbindung Kontaktverbindung,
- 0,005 mm
nein 315
Gleitverbindung Kontaktverbindung,
- 0,005 mm
ja, außer tragende
Flanken
320 - 330
Gleitverbindung Kontaktverbindung,
- 0,01 mm
340
Gleitverbindung Kontaktverbindung,
- 0,02 mm
390
R191 – bei inaktivem Schalter „ohne Gleiten“. Wird „ohne Gleiten“ aktiviert, sind die errechneten
Hauptspannungen deutlich kleiner (im Beispiel 25% – 35%).

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 79 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
13 Schwingungsberechnungen
Die in CATIA benutzten Begriffe zur Schwingungsberechnung entsprechen nicht den Fachbegrif-
fen der Technischen Mechanik und DIN 1311.
„Freie gedämpfte Schwingung“ (als der Fall der transienten Schwingungen, bei dem quasi-
harmonische Ausschwingvorgänge auftreten) statt in CATIA „vorübergehender dynamischer
Antwortprozess“,
„erzwungene gedämpfte Schwingung“ statt in CATIA „harmonischer dynamischer Antwort-
prozess“.
Der „Modale Dämpfungswert“ ist das Hundertfache des Dämpfungsgrades nach DIN 1113-2
bzw. der Dämpfungsgrad in %.
Schwingungsberechnungen sind relativ ausführlich erklärt in /5/:
Eigenfrequenzen des ungedämpften Schwingers („Frequenzprozess“).
Freie gedämpfte Schwingungen („Vorübergehender dynamischer Antwortprozess“).
Erzwungene gedämpfte Schwingungen („Harmonischer dynamischer Antwortprozess“).
Schrittfolge:
3. Statischen Prozess definieren
Vor der „Frequenzanalyse“ ist ein statischen Prozess mit Einspannbedingungen erforderlich,
zusätzlich eine Last für die Anregung bei freien und gedämpften Schwingungen.
Bei der „Freien Frequenzanalyse“ ist der Körper statisch unbestimmt Starrkörperfreiheits-
grade. Diese Analyse kann sofort ohne statischen Prozess gestartet werden.
Voreinstellung: Tools > Optionen > Analyse & Simulation > Allgemein: Einen Standarda-
nalyseprozess definieren deaktivieren, damit sich Auswahlfenster öffnet.
Bild 84: Auswahlfenster der Analyseprozesse
Start > GSA > Freie Frequenzanalyse.
Baum mit Massen und Lösung für Frequenzprozess.
> Berechnen > Alle (wegen Vernetzung) > Verformung (Netzsymbol) .
Baumeintrag Verformtes Netz.
> Doppelklick auf Verformtes Netz.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 80 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Fenster Bildbearbeitung > Register Vorkommen enthält die Eigenwerte.
Bild 85: Eigenwerte
Die ersten 6 Eigenwerte entsprechen in der Regel den Starrkörperverschiebungen in 3
Translations- und um 3 Rotationsachsen, wie sie bei frei im Raum „schwebenden“ oder ext-
rem weich gelagerten bzw. an Gummischnüren aufgehängten Objekten beim Anschlagen mit
dem Impulshammer auftreten. Diese Starrkörperverschiebungen lassen sich vermeiden
durch eine isostatische Lagerung . Die nach /1/ und /4/ empfohlenen Berechnungen der
Eigenfrequenzen mit isostatischer Lagerung und Frequenzanalyse stimmen allerdings in den
vom Autor berechneten Beispielen nicht mit den Eigenfrequenzen der Freien Frequenzana-
lyse und der Frequenzanalyse sehr weich gelagerter Objekte überein. Von einer Fre-
quenzanalyse mit isostatischer Lagerung ist deshalb abzuraten.
4. Frequenzanalyse (Modalanalyse, Eigenschwingungsanalyse) Eigenfrequenzen der un-
gedämpften Schwingungen, werden für Nr. 4 benötigt.
5. Excel- oder Textdateien erstellen mit zeit- oder frequenzabhängigen Belastungsfaktoren.
6. Berechnung gedämpfter Schwingungen
Lastanregung (Kraft, Moment) oder „Bedingungsanregung“ (Beschleunigung, Winkelbe-
schleunigung). Zunächst nur Lastanregung betrachtet.
Freie gedämpfte Schwingungen, in der Regel mit Impuls- oder Sprunganregung.
Erzwungene gedämpfte Schwingungen mit Anregungen durch
frequenzabhängige Belastungsfunktion, z. B. Unwuchterregung oder Sprünge und Ram-
pen, kann aber auch konstante Erregeramplitude über der Frequenz sein,
konstante Belastungsfunktion und Frequenzdurchlauf mit Weißem Rauschen.
7. Ergebnisanzeige und –ausgabe.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 81 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
13.1 Berechnung der Eigenwerte (Frequenzprozess)
13.1.1 Erklärung am einfachen Beispiel Einmasselängsschwinger
1. Statischer Prozess
Startmodell öffnen Einmasse-Laengsschwinger.CATPart.
Aus dem Baumzweig Messung ist die Masse des Würfels mit 7,8 kg zu entnehmen. Zur Kontrolle
der Berechnung ist die Feder so auszulegen, dass die Eigenfrequenz der ungedämpften
Schwingung 100 Hz beträgt. Für 100 Hz Eigenfrequenz und m = 7,8 kg errechnet sich die Weg-
federzahl aus
m
c
2
1f0
, (19)
20f2mc , (20)
c = 3079217 N/m 3,079 106 N/m.
Mit dem Dämpfungsgrad wird Resonanzfrequenz
2sRe 1
m
c
2
1f
, (21)
also für = 0 mit dem gerundeten Wert für die Wegfederzahl fRes = 99,995 Hz und für = 0,05
fRes = 99,87 Hz.
Start > Analyse & Simulation > GSA > Statikanalyse.
Bewegliches virtuelles Teil mit Feder auf un-
tere, gelbe Fläche, gelben Punkt als Steuer-
routine, cz = 3079 N/mm.
Bild 86: Bewegliches virtuelles Teil mit Feder
Erweiterte Bedingung (R14) bzw. bei neueren Releases benutzerdefinierte Randbedingung
[User-defined Restraint] für eine Seitenfläche des Würfels, alle Einschränkungen wählen
mit Ausnahme der 3. Verschiebung in z-Richtung.
Feste Einspannung für Federfußpunkt, d. h. für bewegliches virtuelles Teil mit Feder.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 82 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Kraft in z-Richtung auf obere Würfelfläche, z. B.
10000 N.
Bild 87: Randbedingungen und Last
Berechnen Alle.
2. Eigenfrequenzen berechnen
Einfügen > Frequenzprozess Eingabefenster Bild 88.
Z. B. Übernahme der Bedingungen aus dem statischen Prozess, dazu im Baum Lösung für stati-
schen Prozess.1 selektieren (alternativ nur Bedingungen als Referenz u. dazu Randbedingung.1
des statischen Prozesses im Baum selektieren Bild 89).
Bild 88: Übernahme der Lösung für den statischen Prozess
Bild 89: Übernahme nur der Randbedingungen
Im Baum wird der Ordner „Frequenzprozess“ eingefügt, ist aber noch mit dem Aktualisie-
rungssymbol versehen.
> LMT-Doppelklick auf „Lösung für Frequenzprozess.1“ Eingabefenster für Parameter Bild 90.
Eigentlich genügt für den Einmasseschwinger die Grundfrequenz, also Anzahl der Modi 1, aber
im Beispiel sind 3 Modi gewählt. Wenn der Würfel wegen der kürzeren Berechnungszeit nur mit
TE4-Elementen linear vernetzt ist, werden der 2. und 3. Eigenwert etwas größer berechnet, als
das der Elastizität des Würfels entspricht.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 83 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 90: Eigenfrequenzen für 3 Eigenwerte mit Parametern gewählt
Berechnen .
Entweder Alle (dann auch statischer Prozess, wird aber nicht berechnet, wenn aktuell) oder
„Auswahl der Lösung eines Analyseprozesses“ Bild 91, dazu im Baum „Lösung für Fre-
quenzprozess.1“ selektieren.
Bild 91: Berechnen nur der Lösung für den Frequenzprozess
Anzeige der Ergebnisse:
Symbol „Verformung“ (verformtes Netz) im Baum Verformtes Netz.1.
Doppelklick auf Verformtes Netz.1 Fenster Bildbearbeitung.
Register Vorkommen Eigenfrequenzen der gewählten Anzahl Modi Bild 92.
Bild 92: Eigenfrequenzen der ungedämpften Schwingungen
Register Auswahlmöglichkeiten: nur Tetraedernetz.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 84 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Eventuell Schwingung der gewünschten Modi
animieren und Amplitudengröße
modifizieren .
Bild 93: Animation der Grundschwingung
Ergebnis:
Ana1S_Einmasse-Laengsschwinger_Frequenzprozess.CATAnalysis
Dieses oder das eigene Modell öffnen.
Weil die Ergebnis- und Berechnungsdateien gelöscht wurden, muss die Lösung erst neu be-
rechnet werden.
Im Baumzweig Frequenzprozess RMT auf Sensoren > alle Sensoren aktualisieren [Update
All Sensors]. Nach LMT-Doppelklick auf den Baumeintrag Frequenzliste werden die drei Ei-
genwerte angezeigt.
Differenz zwischen analytisch berechneter Eigenfrequenz der ungedämpften Schwingung
und dem von CATIA berechneten 1. Eigenwert klären.
Im Baumzweig Eigenschaften [Properties] RMT auf Bewegliches virtuelles Teil mit Feder >
Objekt Bewegliches virtuelles Teil mit Feder > Definition … oder LMT-Doppelklick > Defini-
tionsfenster Bewegliches virtuelles Teil mit Feder [Smooth Spring Virtual Part]> Versteifung
der 3. Verschiebung RMT auf Eingabefenster > Formel bearbeiten.
Wenn unter Tools > Optionen > Allgemein > Parameter und Messungen > Register Einhei-
ten die Versteifungskonstante in Newton pro mm gewählt ist:
Formel: `Einmasse-Laengsschwinger\InertiaVolume.1\Masse` *(2*PI*100/1s)**2.
Die 1. Eigenfrequenz erhöht sich danach von 99,9921 Hz auf 99,997 Hz, erreicht aber die
100 Hz nach Gleichung , (19) noch nicht, weil der Würfel aus Stahl natürlich kein starrer
Körper ist und die Elastizität des Würfels auch die 1. Eigenfrequenz beeinflusst.
Elastizitätsmodul [Young Modulus] von 2 105 MPa erhöhen auf 2 108 MPa. Nach dem Ak-
tualisieren der Sensoren beträgt dann die 1. Eigenfrequenz 100 Hz.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 85 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
13.1.2 Vergleich der mit den 3 Varianten der Eigenfrequenzberechnung be-rechneten Eigenwerte
An einem einfachen Testbeispiel sollen die Ergebnisse der drei Varianten der Eigenfrequenzbe-
rechnung gegenübergestellt werden.
Startmodell öffnen.
Freier Frequenzprozess
Start > Analyse & Simulation > GSA > Freie Frequenzanalyse [Free Frequency Analysis],
Elementtyp Parabolisch einstellen (TE10-Elemente),
LMT-Doppelklick auf Baumeintrag Frequenzprozess > Anzahl der Modi 10,
Berechnen .
Lösung für Frequenzprozess selektieren,
wenn nicht schon automatisch gewählt.
Bild 94: Berechnen Frequenzprozess
Verformtes Netz anzeigen lassen .
LMT-Doppelklick auf Baumeintrag
Frequenz > Eingabefenster Globa-
ler Sensor > Vorkommen Alle >
Klick auf Listensymbol > Liste der
Eigenwerte (Vorkommen) ange-
zeigt.
Bild 95: Globaler Sensor Frequenz und Lösung der Eigenwerte
Die ersten 6 Eigenwerte sind Starrkörperverschiebungen und –drehungen. Der 7. Eigenwert
ist die Grundschwingung des Trägers. Mittels Animation werden die Eigenschwingungsformen
angezeigt, im Bild 96 von links nach rechts die Modi 7 bis 10.
Bild 96: Erste vier Eigenschwingungs-formen des Trägers

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 86 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Frequenzprozess mit isostatischer Lagerung
als zweiten Prozess in das Modell oder als einzelnen Prozess in das Startmodell einfügen.
Einfügen > Statischer Prozess > Neu, umbenennen in Statischer Prozess isostatische La-
gerung.
Isostatische Lagerung vornehmen.
Berechnen > Lösung für statischen Prozess.1.
Einfügen Frequenzprozess > Referenz Lösung für statischen Prozess.1.
Bild 97: Frequenzprozess für isostatische Lagerung
Berechnen > Lösung für Frequenzprozess.2.
Verformtes Netz anzeigen lassen .
LMT-Doppelklick auf Baumeintrag Lösung für Frequenzprozess.2 > Anzahl der Modi 5.
Weiteres Vorgehen wie unter Freier Frequenzprozess beschrieben.
Bild 98: Fehlerhafte Frequenzen bei isostatischer Lagerung (R14 bis R20)

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 87 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Frequenzprozess mit sehr weicher Lagerung
Einfügen > Statischer Prozess > Neu, umbenennen in Statischer Prozess weiche Lage-
rung.
Einfügen Bewegliches virtuelles Teil mit Feder [Smooth Spring Virtual Part] links und rechts
auf gelbe Teilflächen, Federzahlen nach Bild 99.
Feste Einspannung der beiden virtuellen Teile.
Bild 99: Weiche Lagerung des Trägers
Berechnen > Lösung für statischen Prozess.2 (weiche Lagerung).
Einfügen Frequenzprozess > Referenz Lösung für statischen Prozess.2.
Berechnen > Lösung für Frequenzprozess.3.
Verformtes Netz anzeigen lassen .
LMT-Doppelklick auf Baumeintrag Lösung für Frequenzprozess.3 > Anzahl der Modi 10.
Weiteres Vorgehen wie unter Freier Frequenzprozess beschrieben.
Bild 100: Nahezu identische Eigenwerte und Schwingungsformen des weich gelagerten Trägers mit den Ergebnissen des Freien Frequenzpro-zesses ohne Lagerung des Trägers
Eigenwertberechnung mit isostatischer Lagerung ist unbrauchbar!
Ergebnisdatei:
Ana2S_T-Traeger_3Frequenzprozesse.CATAnalysis

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 88 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
13.2 Freie gedämpfte Schwingungen
Vor der Berechnung freier gedämpfter Schwingungen mit CATIA sind erforderlich:
Statischer Prozess mit den notwendigen Randbedingungen und einer Last bei Lastanregung,
bei Bedingungsanregung [Restraint Excitation] (Vorgabe von Beschleunigungen der Struktur)
genügen die Randbedingungen,
Lösung eines Frequenzprozesses wegen der Eigenfrequenzen,
zeitabhängige Erregerfunktion (Modulation) entweder als Textdatei vom Typ txt oder als
Exceltabelle.
Bild 101: Einfügen eines „vorübergehenden dynamischen Antwortprozesses“
1. Einfügen vorübergehender dynamischer Antwortprozess [Insert Transient Dynamic
Response Case].
2. Als Referenz für die Lösung des Frequenzprozesses die Lösung im Baum selektieren > Vo-
rübergehender dynamischer Antwortprozess im Baum und Modulationen sind aktiviert.
3. Zeitmodulation aus einer Datei einfügen [Insert a time modulation from a file] .
4. LMT-Doppelklick auf Baumeintrag Lastanregung.1 [Load Excitation.1] > Fenster Lastanre-
gung [Load Excitation Set].
5. Als ausgewählte Last im Baum Lasten.1 selektieren. Alle unter Lasten.1 verzeichnete Las-
ten werden verarbeitet. Mit dem „Ausgewählten (Last-)Faktor“ werden die Lasten multipli-
ziert.
6. Ausgewählte Modulation (Erregerfunktion) im Baum selektieren.
Die Erklärungen erfolgen am Beispielmodell Einmasseschwinger.
13.2.1 Erregerfunktionen für Last- und Bedingungsanregung
Die Dateien für die Zeitmodulation müssen zwei Spalten mit je einer Spaltenüberschrift enthal-
ten. Die erste Spalte enthält die Erregungszeitpunkte, in der Überschrift muss nach der Benen-
nung in Klammern die Zeiteinheit in Sekunden stehen. Die zweite Spalte enthält die Erregungs-
faktoren (mit denen die Lasten Lastfaktor multipliziert werden), nach der Benennung in der
Spaltenüberschrift muss eine leere Klammer folgen.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 89 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Zeit(s) Erregungsfaktor()
0 0
0,200 0
0,200 1
0,201 1
0,201 0
0,500 0
13.2.1.1 Sprung-, Impuls- und andere Funktionen als Exceltabellen
Für die Erregung freier gedämpfter Schwingungen wird meist ein kurzer, impulsähnlicher Recht-
eckstoß (Dauer des Rechteckstoßes ca. 0,001 s) oder ein Sprung aufgebracht. Eingabewerte für
das Excelarbeitsblatt enthalten Bild 102, Bild 103 und Bild 106. Die Eingabewerte für einen Drei-
eckstoß zeigt Bild 104 und für eine Rampenfunktion Bild 105. Für sinusförmige Erregungen (Bild
107 bis Bild 109 und Bild 111) wird das Excel-Arbeitsblatt
sonstVkn\Harm_sinErreg_Varianten.xls bereitgestellt.
Bild 106: Impulsdauer 0,001 s
Bild 102: 15-Sekunden-Rechteckstoß Bild 103: Sprung
Bild 104: Dreieckstoß Bild 105: Rampenfunktion
-1
-0,5
0
0,5
1
0 55 110 165
-1
-0,5
0
0,5
1
0 55 110 165
Zeit(s) Erregungsfaktor()
0 0
5 0
10 1
20 0
40 0
Zeit(s) Erregungsfaktor()
0 0
5 0
10 1
20 1
40 1
-1
-0,5
0
0,5
1
0 55 110 165
Zeit(s) Erregungsfaktor()
0 0
5 0
5 1
20 1
20 1
-1
-0,5
0
0,5
1
0 55 110 165
Zeit(s) Erregungsfaktor()
0 0
5 0
5 1
20 1
20 0

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 90 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
-1
-0,5
0
0,5
1
0 0,004 0,010 0,015 0,021 0,026
-1
-0,5
0
0,5
1
0 0,004 0,010 0,015 0,021 0,026
Bild 109: Mehrfachsinusstoß
Der Mehrfachsinusstoß ist praktisch eine zeitlich be-
grenzte erzwungene Schwingung.
Bild 110: Exceltabelle zur Modellierung verschiedener Sinusstöße
Modifizierte Werte können in die gelben Felder der Exceltabelle eingegeben werden, zum Bei-
spiel für einen Halbsinusstoß:
Anzahl der Schwingperioden 0,5,
Perioden Kraftanstieg 0,
Rampenfaktor 0.
Bild 107: Halbsinusstoß Bild 108: Sinusstoß
-1
-0,5
0
0,5
1
0 0,015 0,034 0,054 0,073 0,092

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 91 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 111: Links Exceldiagramm Mehrfachsinusstoß mit Anlauframpe und Rampenfaktor 5, rechts CATIA-Schwingungen mit diesem Sinusstoß.
Bild 110 und Bild 111, links zeigen exemplarisch eine modifizierte Mehrfach-Sinuskrafterregung
mit über 10 Perioden linear zunehmender Amplitudengröße und um den Rampenfaktor 5 ver-
schobener Nulllage. Am Ende der Erregung nach 0,15 s beginnt die freie gedämpfte Schwin-
gung. Nach dem Abklingen der freien gedämpften CATIA-Schwingung verbleibt der Schwinger
außerhalb der Nulllage (Bild 112 rechts).
Für den Einmasseschwinger auf Basis des Modells Ana3S_Einmasse-
Laengsschwinger_Frequenzprozess.CATAnalysis mit einer Wegfederzahl von 3079 N/mm und
einer Last von 10000 N errechnet sich die Auslenkung aus der Nulllage nach Abklingen der
Schwingung bei einem Lastfaktor von 1 und dem Rampenfaktor des Mehrfachsinusstoßes von 5
zu
yR = Last in N / Wegfederzahl in N/mm Lastfaktor Rampenfaktor ,
mm2,16513079
10000yR .
Die Amplituden des Einmasseschwingers während der Anregung durch den Mehrfachsinusstoß
errechnen sich aus
ŷ = Last in N / Wegfederzahl in N/mm Lastfaktor Erregeramplitudenfaktor Vergrößerungsfunktion
mit der Vergrößerungsfunktion V1
2
0
Err
22
0
Err
1
f
f2
f
f1
1V
, (22)
bei fErr = fRes
20sRe 21ff (23)
und 0,5 mit der Vergrößerungsfunktion V1max
2
max112
1V
. (24)

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 92 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
13.2.1.2 Belastungs-Zeit-Funktion („Zeitmodulation“)
Startmodell öffnen
Ana3S_Einmasse-Laengsschwinger_Frequenzprozess.CATAnalysis.
Weil vor dem Speichern die Ergebnis- und Berechnungsdateien gelöscht wurden, müssen die Lösungen neu berechnet werden, z. B. durch Berechnen > Alle [Compute > All] .
1. Einfügen vorübergehender dynamischer Antwortprozess [Insert Transient Dynamic
Response Case] Eingabefenster.
2. Referenz: Klick auf Lösung für Frequenzprozess.1 im Baum Bild 112.
Bild 112: Freie gedämpfte Schwingungen mit Lastanregung
Vorübergehender dynamischer Antwortprozess erscheint im Baum, Lastanregung.1, Dämp-
fung.1 und Lösung für vorübergehende dynamische Antwort.1 sind noch mit dem Aktualisie-
rungssymbol versehen.
Die Symbole für Modulationen sind aktiviert und damit selektierbar.
3. Zeitmodulationen aus einer Datei einfügen [Insert a time modulation from a file] .
Eingabefenster. Zunächst soll eine Impulsfunktion ausgewählt werden.
> Durchsuchen > Datei sonstVkn\Impuls_0,001s.xls selektieren (Bild 113).
Bild 113: Auswahl einer Datei zur Impulssimulation
Name: Zeitmodulation.1_Impuls_0,001.
4. Lastanregung definieren
LMT-Doppelklick auf Baumeintrag Lastanregung.1 [Load Excitation.1] Fenster Lastanre-
gung [Load Excitation Set] (Bild 114).
Ausgewählte Last: Im Baum Last.1 aus statischem Prozess selektieren.
Ausgewählte Modulation: Zeitmodulation.1_Impuls_0,001 im Baum selektieren.
Ausgewählter Faktor: Lastfaktor 1 belassen. Die Erregerkraft errechnet sich aus

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 93 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Erregerkraft = statische Last Ausgewählter (Last-)Faktor Erregungsfaktor aus Tabelle, bei
einem Erregungsfaktor von 5 in der Tabelle sonstVkn\Impuls_0,001s.xls also zu
Erregerkraft = statische Last 1 5 = 50000 N. Im weiteren Verlauf der Erklärungen werden
die Faktoren modifiziert.
Bild 114: Definition der Lastanregung
13.2.2 Berechnen des Ausschwingvorganges
13.2.2.1 Dämpfung festlegen
Doppelklick auf Dämpfung.1 im Baum Eingabefenster Dämpfung – Auswahl
Dämpfung – Typ: In der Regel „Modale Dämpfung“ (Dämpfungsgrad in %), die geschwin-
digkeitsproportional angesetzt wird. Bei der Rayleigh-Dämpfung, umgangssprachlich „Be-
quemlichkeitsdämpfung“ genannt, werden die Koeffizienten auf Masse (beschleunigungs-
proportional) und Steifigkeit (wegproportional) bezogen. Die Aufteilung der Koeffizienten, z.
B. aus gemessenen Amplitudengängen oder Abklinkkurven, ist schwieriger abzuschätzen.
Doppelklick auf Schraubenschlüsselsymbol Eingabefenster Dämpfung – Definition
Entweder globalen Dämpfungsgrad für alle Eigenfrequenzen oder Definition der einzelnen
Modi und unterschiedliche Dämpfungsgrade eingeben.
Bild 115: Definition der Dämpfung, hier zunehmend mit den Resonanzfrequenzen

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 94 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
13.2.2.2 Zeiten für Start und Ende der Simulation
Doppelklick auf Lösung für vorübergehende dynamische Antwort.1 im Baum Eingabefens-
ter Vorübergehendes dynamisches Antwort-Set Bild 116.
“Minimale Abtastrate“ (Startzeit): in der Regel 0 s. Weil bei der gewählten Impulsfunktion der
Impuls von 0,2 s bis 0,201 s dauert, kann die Startzeit auf tmin = 0,15 s gesetzt werden.
“Maximale Abtastrate“ (Endzeit): muss in Abhängigkeit der Eigenfrequenz und der ge-
wünschten Anzahl der Schwingungsperioden festgelegt werden.
Anzahl der Schritte: Anzahl der Berechnungsschritte zwischen Anfangs- und Endzeit.
Die Anzahl der Schritte sollte mindestens 20 pro Schwingungsperiode betragen.
Bei f0 = 100 Hz und 20 Perioden des Ausschwingvorgangs im Diagramm wären ca. 400
Schritte nur für das Ausschwingen erforderlich, d. h. für einen Zeitabschnitt von
tAusschwingen = 400 1/100 s 20 = 0,2 s.
Für den darzustellenden Vorgang zwischen tmin = 0,15 s und tmax = 0,5 s sollte die Anzahl der
Schritte mindestens 700 sein.
Bild 116: Zeitgrenzen und Schrittanzahl
13.2.2.3 Schwingungsvorgang berechnen
> Symbol Berechnen .
> Auswahl der Lösung des Analyseprozesses: Lösung für vorübergehende dynamische Antwort.
> OK.
13.2.3 Ergebnisdarstellung
> RMT auf Lösung für vorübergehende dynamische Antwort Kontextmenü .
> 2D-Anzeige generieren Fenster Neue Anzeige einer Funktion.
> Weiter Register Auswahl.
Bild 117: Anzahl der Diagramme festlegen
> Beenden Diagrammfenster und Fenster Datenauswahl.
Knoten und jeweils darzustellende Verschiebungsrichtungen (TX, TY, TZ) festlegen.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 95 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 118: Auswahl der Knoten und Verschiebungsrichtungen
Register Auswahl > Kursor in Feld Knoten > Kopfleistenmenü Fenster > vom Diagrammfens-
ter zum Analysefenster wechseln > Netzknoten selektieren (Knoten im dargestellten Netz mit
MT1-Klick auswählen) im Eingabefeld Knoten.
(Falls das Netz zur Auswahl der Knoten nicht sichtbar ist, sind der Baumzweig Knoten und
Elemente oder das OCTREE-Tetraedernetz.1: Einmasse-Laengsschwinger verdeckt > An-
zeigen!).
Richtungen für diesen Knoten auswählen, im Bild 118 nur z-Richtung gewählt.
Hinzufügen >> , danach gleiche Schrittfolge für nächsten Knoten.
Register Layout Fenster Daten auswählen > Darzustel-
lende Größen für die Kurven auswählen. (Fenster kann
auch später durch Klick in das Diagramm geöffnet werden.)
Bild 119: Auswahl der darzustellenden Größen
1 graph: Wegkoordinate oder auch alternativ Geschwindigkeit bzw. Beschleunigung.
2 graph bzw. 3 graph: z. B. Weg, Geschwindigkeit und/oder Beschleunigung bzw. unter-
schiedliche Punkte der Struktur des Schwingers in den Diagrammen darstellen lassen.
mit Schließen beenden Diagramme werden im Fenster Ergebnisse angezeigt.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 96 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Darstellungen der Diagramme anpassen.
Durch LMT-Doppelklick oder mit RMT auf die Achsenbeschriftungen und den Diagrammtitel
öffnen sich Auswahlfenster zur Anpassung der Darstellung.
Bild 120: Anpassen der Diagrammdarstellung
Einheiten für die Achsenbeschriftungen
RMT auf Diagrammtitel > Optionen > Register Eigenschaften: statt MKS Definierte Optio-
nen wählen, damit die unter Tools > Optionen eingestellten Einheiten übernommen werden
und die Amplitudengröße nicht in Metern angezeigt wird.
Format für die Ordinate: Die Formatangabe „Amplitude“ ist irreführend. Positive und negati-
ve Amplituden werden bei der grafischen Darstellung in CATIA nur mit dem Ordinatenfor-
mat Reelle Zahl angezeigt, beim Format Amplitude nur positive Werte!
Für die Skalierung der Achsen ist meist der Limittyp „Optimiert“ am zweckmäßigsten.
Bei Bedarf Diagramm und Achsentitel modifizieren.
Zwischenstand gespeichert in
Ana4S_Einmasse-Laengsschwinger_freie_ged_Schwing1.CATAnalysis.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 97 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
13.2.4 Daten exportieren
RMT auf Kurve der Ergebnisdarstellung Kontextmenü > Daten exportieren > Dateityp „Text“
bzw. „Excel“.
Hinweis: Bis R14 gab es teilweise Probleme beim Datenexport nach Excel, weil die CATIA-
Dezimalpunkte manchmal nicht in Excel-Dezimalkommas gewandelt wurden. In solchen Fällen
zunächst als „Text“ exportieren und dann die Spalten der txt-Datei in ein Exceltabellenblatt kopie-
ren.
13.2.5 Erregerfunktionen (Zeitmodulationen) des Modells modifizieren
In das Modell Ana4S_Einmasse-Laengsschwinger_freie_ged_Schwing1.CATAnalysis sollen wei-
tere Zeitmodulationen eingefügt und die Dateien der Erregerfunktionen modifiziert werden.
Zeitmodulationen aus einer Datei einfügen [Insert a time modulation from a file] , die Datei
sonstVkn\Harm_sinErreg_Varianten.xls auswählen und benennen als Zeitmodulati-
on.2_Sinuserregung.
Entweder neuen „Vorübergehenden dynamischer Antwortprozess“ einfügen oder Lastanre-
gung.1 modifizieren. Im Beispielmodell wird ein neuer Prozess Vorübergehenden dynami-
scher Antwortprozess Sinus eingefügt.
Lastanregung.2 mit Lasten.1 und Zeitmodulation Sinuserregung.
Dämpfung.2 wie Dämpfung.1.
Minimale Abtastrate tmin = 0 s, maximale Abtastrate tmax = 0,5 s, Anzahl der Schritte 2000.
Berechnen und Kurve darstellen.
Der Zwischenstand ist gespeichert in der Datei
Ana5S_Einmasse-Laengsschwinger_freie_ged_Schwing2.CATAnalysis.
Datei sonstVkn\Harm_sinErreg_Varianten.xls öffnen, Werte in den gelben Fenstern modifi-
zieren
und Datei speichern unter Schwingungen\Harm_sinErreg_V1.xls.
LMT-Doppelklick auf Zeitmodulation.2_Sinuserregung > Durchsuchen und Datei Schwin-
gungen\Harm_sinErreg_V1.xls auswählen. Die grafische Darstellung der Kurve wird nach
Doppelklick auf den mit einem Aktualsierungssymbol versehenen Baumeintrag Ergebnisse in
relativer Achse - 1 graph angepasst.
Fenster von CATIA mit der grafischen Darstellung der Kurve und Excel-Arbeitsblatt überlap-
pend auf dem Bildschirm anordnen. In der Exceldatei Erregerfrequenz ändern von 100 Hz in
30 Hz und Schwingungen\Harm_sinErreg_V1.xls speichern.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 98 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Nach kurzer Zeit kommt bei entsprechend gewählten Optionen in CATIA die Informations-
meldung nach Bild 121.
Bild 121: Informationsmeldung zur Synchronisation der Berechnungen mit der modifizierten Er-regerfunktion in der Exceltabelle
Die grafische Darstellung der Kurve ändert sich aber erst nach Doppelklick auf den mit ei-
nem Aktualsierungssymbol versehenen Baumeintrag Ergebnisse in relativer Achse - 1 graph.
Wegen der längeren Zeitdauer der Erregung muss die maximale Abtastrate erhöht werden,
z. B. auf tmax = 0,7 s.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 99 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
XKoord(Hz) YKoord()
0 0
10 0
10 1
100 1
100 1,5
200 1,5
300 2
400 1
600 1
600 0
13.3 Erzwungene gedämpfte Schwingungen
Das Vorgehen ist weitgehend identisch mit dem unter 13.2 Freie gedämpfte Schwingungen be-
schriebenen. Unterschiede gibt es nur hinsichtlich Schwingungserregung und Ergebnisdarstel-
lung.
13.3.1 Erregerfunktion für Lastanregung
Maximalwerte der Erregeramplituden sind als Funktion der Erregerfrequenz in Tabellenform (*.txt
oder *.xls) anzugeben, nicht als zeitlich veränderliche Funktionen. Für konstante Erregeramplitu-
den kann auch gleich die Funktion „Weißes Rauschen“ (Rauschen mit konstanter Amplitude im
Spektrum) genutzt werden.
13.3.1.1 Funktionen als Exceltabellen
Die Benennung der Spalten ist freigestellt, nur die Klammern sind vorgegeben. Statt XKoord(Hz)
kann also auch Erregerfrequenz(Hz) und statt YKoord() Erregeramplitudenfaktor() geschrieben
werden.
Konstante Lastamplitue für Frequenzfunktion von 0 Hz bis 200 Hz,
links Erregeramplitudenfaktor 1, rechts Erregeramplitudenfaktor 5.
Variable Lastamplitude für Frequenzfunktion von 0 Hz bis
600 Hz mit Lastsprüngen bei 10 Hz, 100 Hz und 600 Hz
sowie Lastrampen von 200 Hz bis 300 Hz und von 300 Hz
bis 400 Hz.
Unwuchterregung
Leere Spalte C!!!
Bild 122: Unwuchterregung
sonstVkn\Unwuchterreg_0-600Hz.xls
XKoord(Hz) YKoord()
0 1
0 1
200 1
200 1
XKoord(Hz) YKoord()
0 5
0 5
200 5
200 5

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 100 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
13.3.1.2 Belastungs-Frequenz-Funktion („Frequenzmodulation“)
Startmodell: Datei neu aus
Ana1S_Einmasse-Laengsschwinger_Frequenzprozess.CATAnalysis einschließlich CATPart und
umbenennen in
Schwingungen\Einmasse-Laengsschwinger_erzwSchw1.CATAnalysis sowie
Schwingungen\Einmasse-Laengsschwinger_Netz_20mm.CATPart.
Bei den erzwungenen Schwingungen wird nur der erste Eigenwert untersucht, deshalb
OCTREE-Tetradernetz auf 20 mm ohne Durchhangvorgaben abändern.
Weil vor dem Speichern die Ergebnis- und Berechnungsdateien gelöscht wurden, müssen die
Lösungen neu berechnet werden, z. B. durch Berechnen > Alle [Compute > All] .
1. Einfügen > Harmonischer dynamischer Antwortprozess [Insert > Harmonic Dynamic
Response Case] Eingabefenster, Umbenennen in Harmonischer dynamischer Antwort-
prozess Weißes Rauschen.
2. Lösung für Frequenzprozess Referenz: Klick auf Lösung für Frequenzprozess.1 im Baum,
Lastanregung
Lastanregung, Dämpfung und Lösung für harmonische dynamische Antwort.1 im Baum,
Modulationsarten sind selektierbar .
Für erzwungene Schwingungen sind Weißes Rauschen oder
Frequenzmodulation F geeignet.
3. Frequenzmodulation einfügen
In das Beispielmodell werden gleich zwei Erregerfunktionen eingefügt:
Weißes Rauschen,
Frequenzmodulation, Datei
sonstVkn\Unwuchterreg_0-
600Hz.xls wählen.
Bild 123: Frequenzmodulationen

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 101 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
4. Lastanregung definieren
LMT-Doppelklick auf Baumeintrag Lastanregung.1 [Load Excitation.1] Fenster Lastanre-
gung [Load Excitation Set].
Ausgewählte Last: Last.1 aus statischem Prozess.
Ausgewählte Modulation: Modulation „Weißes
Rauschen“ für konstante Erregerkraftamplitu-
den im Baum selektieren.
Ausgewählter Faktor: 1 (oder 0,1 für 1 kN Erre-
gerkraft).
Ausgewählte Phase: 0 °.
Bild 124: Lastanregung mit konstanten Erregerkraft-
amplituden
Erregerkraft = statische Last ausgewählter (Last-)Faktor Erregeramplitudenfaktor
13.3.2 Berechnen des Frequenzganges
13.3.2.1 Dämpfung festlegen
Doppelklick auf Dämpfung.1 im Baum Eingabefenster Dämpfung – Auswahl
In der Regel „Modale Dämpfung“ (Dämpfungsgrad in %), Rayleigh-Dämpfung schwieriger
abzuschätzen.
Doppelklick auf Schraubenschlüsselsymbol Eingabefenster Dämpfung – Definition
des globalen Dämpfungsgrades für alle Eigenfrequenzen 5 %, weil bei diesem Einmasse-
schwinger ohnehin nur die Grundfrequenz interessiert.
13.3.2.2 Frequenzbereich der Simulation
Doppelklick auf Lösung für harmonische dynamische Antwort.1 im Baum Eingabefenster
Harmonisches dynamisches Antwort-Set.
“Minimale Abtastrate“ (Startfrequenz): 0 Hz für Anzeige der statischen Verformung,
“Maximale Abtastrate“ (Endfrequenz): 200 Hz,
Anzahl der Schritte: 400
Anzahl der Berechnungsschritte zwischen Anfangs- und Endfrequenz. Bei kleinen Dämp-
fungen dürfen die Frequenzschritte nicht zu groß sein, damit die maximalen Amplituden der
Resonanzstellen auch hinreichend genau berechnet werden.
Für die erste Grobberechnung können größere Frequenzschritte gewählt werden. Bei Kon-
tinuums- oder Mehrmassenschwingern anschließend ggf. getrennte Simulationen je Reso-
nanzfrequenz bzw. dicht beieinander liegende Resonanzfrequenzgruppe mit entspr. Start-
und Endfrequenzen rechnen lassen.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 102 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
13.3.2.3 Schwingungsvorgang berechnen und darstellen
> Symbol Berechnen.
> Auswahl der Lösung des Analyseprozesses: Lösung für harmonische dynamische Antwort.1.
> OK.
13.3.3 Ergebnis in Diagrammen darstellen
> RMT auf Lösung für harmonische dynamische Antwort Kontextmenü.
> 2D-Anzeige generieren Fenster Neue Anzeige einer Funktion.
> Weiter Fenster Neue Anzeige einer Funktion > 3 graphs wählen.
> Beenden Fenster Daten auswählen, Register Auswahl
Knoten und jeweils darzustellende Verschiebungsrichtungen (TX, TY, TZ) festlegen.
Register Auswahl
Kursor in Feld Knoten > Kopfleistenmenü Fenster > vom Diagrammfenster zum Analyse-
fenster wechseln > Knoten im dargestellten Netz mit MT1-Klick auswählen (OCTREE-
Tetraedernetz muss im Ansichtsmodus Anzeigen sein) im Eingabefeld Knoten.
Richtungen für diesen Knoten auswählen, hier nur TZ.
Hinzufügen >> .
Register Layout
Bei drei Diagrammen werden diesen automatisch Verschiebung, Geschwindigkeit und Be-
schleunigung zugewiesen. Es sollen aber in alle drei Diagrammen die Verschiebungen (3 x
Abweichung [Displacement]) angezeigt werden.
Die Einstellungen lassen sich auch nachträglich modifizieren. Mit RMT-Klick auf die Dia-
grammfläche öffnet sich ein Kontextmenü, in dem die Option Daten auswählen zu selektie-
ren ist.
> Schließen Diagramme werden im Fenster Ergebnisse angezeigt.
Den Ordinatenwerten der drei Diagramme die gewünschten Formate zuweisen und die Über-
schriften und Achsenbenennungen der drei Diagramme entsprechend anpassen. z. B.
Amplituden-Frequenzgang,
Phasenwinkel-Frequenzgang und
Amplitudenimaginärteil-Frequenzgang.
RMT auf Beschriftung der y-Achse Kontextmenü > z. B. Register Format.
(Wieder unsinnige CATIA-Benennungen!!!)
Unter Amplitude sind Weg-, Geschwindigkeits- und Beschleunigungsamplituden gemeint.
„Reelle Zahl“ – Realteil des Amplituden-Frequenzganges,
„Imaginär“ – Imaginärteil des Amplituden-Frequenzganges,
„Synchronisierungsgrade“ – Phasenwinkel-Frequenzgang, Phasenwinkel in Grad, CATIA-

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 103 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Einheit „mm“ ist natürlich falsch,
„Synchronisierungsradianten“ – Phasenwinkel-Frequenzgang, Phasenwinkel in Radiant,
„Amplitude“ – Amplituden-Frequenzgang,
„Logarithmisch“ – Amplituden-Frequenzgang mit logarithmischer Skalierung der y-Achse
„dB(RMS)” – Effektivwert (RMS root-mean-square),
„dB(Peak)” – lg Amplituden-Frequenzgang.
Bild 125: Ergebnis für Einmasseschwinger mit Erregungsfunktion Weißes Rauschen
13.3.4 Durch Unwucht erzwungene Schwingungen
Neuen Harmonischen dynamischer Antwortprozess Unwuchterregung einfügen.
Lastanregung.2:
Ausgewählte Last: Last.1 aus statischem Prozess,
Ausgewählte Modulation: Frequenzmodulation.1_Unwuchterregung_0-600Hz,
Ausgewählter Faktor: 0,1,
Ausgewählte Phase: 0°.
Dämpfung.2: global 5 %
Frequenzbereich und Schritte: 0 Hz bis 600 Hz, Anzahl der Schritte: 1000.
Ergebnis: ...\Ana6S_Einmasse-Laengsschwinger_erzwSchw1.CATAnalysis (Bild 126 links).

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 104 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
13.3.5 Kraft- und beschleunigungserregte gedämpfte Schwingungen eines Zweimassensystems
Startmodell (zweckmäßig Datei neu aus): Ana7S_Zweimassen-
Laengsschwinger_Unwuchterr_optim_o_Krafterr.CATAnalysis.
13.3.5.1 Unwucht- und Krafterregung
Bei dem Zweimassensystem handelt sich um den bereits mehrfach berechneten Einmasse-
schwinger mit einem angekoppelten Tilgermasse-Längsschwinger.
In dem Modell sind bereits die Lösungen für durch Unwuchterregung sowie durch Krafterregung
erzwungene gedämpfte Schwingungen enthalten. Die Federzahl des Tilgersystems wird mittels
Parameter zugewiesen. Unter Tools > Optionen > Analyse & Simulation > Register Allgemein,
Strukturbaum muss also Parameter anzeigen gesetzt sein.
Die Federzahl des Tilgersystems ist mit 529 N/mm für die Unwuchterregung so optimiert worden,
dass die Schwingungsamplituden der Hauptmasse minimal sind, d. h. für beide Resonanzfre-
quenzen die gleiche Größe von 16,5 mm statt der 32,1 mm des Einmasseschwingers ohne Tilger
haben (Bild 126, rechts).
Die optimale Federzahl bei Krafterregung beträgt 380 N/mm.
Bild 126: Unwuchterregung am Beispiel des Einmasse-Längsschwingers (links) und des Zwei-massensystems aus Längsschwinger mit angekoppeltem Tilger (rechts)
Zur Darstellung der bereits im Modell angelegten Diagramme wie folgt vorgehen.
Berechnen > Alle.
Schwingungstilger
Längsschwinger

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 105 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Im Baumzweig
Harmonischer dynamischer Antwortprozess_Unwuchterregung_an Hauptmasse (bzw.
Harmonischer dynamischer Antwortprozess_Krafterregung_an_Hauptmasse).
Doppelklick auf Ergebnisse Unwuchterregung in relativer Achse - 2 graphs (bzw. Ergebnis-
se Krafterregung in relativer Achse - 2 graphs).
Im aufgehenden Fenster „Daten auswählen“, Register Layout auch für Grafik 2 Abweichung
[Displacement] wählen.
Optimale Federzahl durch Parameter zuweisen.
Bild 127: Auswahl der Federzahl für die benutzerdefinierte Verbindung Federzahl Tilger
Diagramme wieder aktualisieren.
13.3.5.2 Beschleunigungsanregung
Einfügen > Harmonischer dynamischer Antwortprozess_Bedingungsanregung Eingabe-
fenster Bedingungsanregung.
Bild 128: Eingaben für Bedingungsanregung
Dämpfung.3: Dämpfungstyp modale Dämpfung > Klick auf Schraubenschlüsselsymbol >
globalen Wert 5 % eingeben.
LMT – Doppelklick auf Lösung für harmonische dynamische Antwort.3 und Eingaben
minimale Abtastrate: 0 Hz, maximale Abtastrate: 200 Hz, Anzahl der Schritte: 800.
Lösung für harmonische dynamische Antwort.3 markieren und Klick auf Symbol Berechnen.
RMT auf Lösung für harmonische dynamische Antwort.3 > > Ergeb-

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 106 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
nisse in relativer Achse > Weiter > 2 graphs > Beenden .
Auswahl je eines Netzknotens auf der Haupt- und der Tilgermasse.
Layout > In einem Fenster den Amplitudengang (unten ist am einfachsten), im zweiten
Fenster den Phasengang darstellen lassen.
Anpassen der Darstellung wie unter 13.3.3 beschrieben.
Versteifungskonstante für Tilgersystem so modifizieren, dass beide Resonanzamplituden der
Hauptmasse die gleiche Größe haben.
Zweckmäßig Fenster teilen.
Dem Parameter optFederzahl_Beschleunigungserregung, der noch die Größe 0 N/mm hat,
einen ersten Wert zuweisen, z. B. 400 N/mm.
Mittels Formel den Parameter der benutzerdefinierten Verbindung Feder_Tilgermasse, Ver-
steifung 3 der Verschiebung zuweisen (Bild 129).
Bild 129: Parameter optFederzahl_Beschleunigungserregung zuweisen
Diagramm aktualisieren und Vorgang so lange wiederholen, bis das gewünschte Ziel er-reicht ist.
Das Ergebnis ist gespeichert unter Ana8S_Zweimassen-
Laengsschwinger_Unwuchterr_Krafterr_Bedanreg_opt.CATAnalysis
13.3.5.3 Daten nach Excel exportieren
Vgl. 13.2.4! In Excel Ortskurvendarstellung als Punkt(XY)-Diagramm, alternativ Mathcad nutzen.
Beispiel einer Exceldatei: sonstVkn\Frequenzgänge_0-
200Hz_Stufen_2Hz_Unwuchterr_1Hz_Krafterr_V_ReV_ImV.xls,
Ortskurvendarstellung mit Mathcad, gespeichert für Versionen ab 12:
sonstVkn\Zweimassenschw_Ortskurven_Amlitude_u_V_Krafterregung_12.mcd,
Ortskurvendarstellung mit Mathcad als PDF-Datei:
sonstVkn\Zweimassenschw_Ortskurven_Amlitude_u_V_Krafterregung.pdf.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 107 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
13.4 Beispiel erzwungene gedämpfte Schwingungen Hauptspindel
Als Beispiel für einen Kontinuumsschwinger wird das bereits benutzte Modell einer Drehmaschi-
nen-Hauptspindel gewählt. Hinreichend genaue Ergebnisse erfordern eine parabolische Vernet-
zung.
Für die Lösung von Eigenwertproblemen mit dem Elfini-Solver von CATIA sind „Kontaktelemen-
te“ nicht zulässig. Das betrifft die in der Hauptspindelbaugruppe vorhandenen Typen Kontaktver-
bindungen, Presspassung und Festdrehen von Bolzen.
Gegenüber den Hauptspindelmodellen für statische Berechnungen wurden für die Schwingungs-
berechnung folgende Modifikationen vorgenommen:
Durch fixierte Verbindungen ersetzt
Spannbacken,
Stirnflächen Futter-Spindelflansch,
Bodenradbohrung.
Schrauben sind damit überflüssig und wurden aus der Baugruppe entfernt.
Statt der Schnittkraftkomponenten wird zunächst und nur eine Erregerkraft auf die Werk-
stückstirnfläche in z-Richtung aufgebracht.
Startmodell mit eingefügtem Frequenzprozess: Datei neu aus
Ana9S_Hauptspindel-6Eigenwerte_ohneSchrauben_weicheLager.CATAnalysis.
(Ggf. für einen Grobüberblick vorübergehend Netztyp von parabolisch in linear ändern.)
Berechnen > Alle.
Doppelklick auf Frequenz > Klick auf Frequenzlistensymbol Eigenwerte.
Bild 130: Erste sechs Eigenwerte der Hauptspindelbaugruppe mit Werkstück
Von den ersten sechs Eigenwerten liegen je zwei so dicht beieinander, dass im Amplituden-
Frequenzgang nur drei Resonanzamplituden ersichtlich sein werden. Es ist zu empfehlen,
sich die Eigenschwingungsformen für die sechs Eigenfrequenzen am aktivierten verformten Netz.2 durch Animieren anzusehen (Bild 131).

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 108 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 131: Animation der Eigenschwingungsformen
Einfügen > Harmonischer dynamischer Antwortprozess.
Modulation einfügen: Weißes Rauschen.
Lastanregung.1
Ausgewählte Last: Lasten.1 vom statischen Prozess,
Ausgewählte Modulation: Weißes Rauschen.1,
Ausgewählter Faktor: 1.
Dämpfung.1: Modale Dämpfung, globaler Dämpfungsgrad 2 %. (Eigentlich nimmt die Dämp-
fung bei höheren Frequenzen meist zu.)
Lösung für harmonische dynamische Antwort: 0 Hz bis 800 Hz, Anzahl der Schritte 1600.
Ergebnisdarstellung in zwei Diagrammen (Bild 132)
unten Amplituden-Frequenzgang, wegen der kleinen Resonanzamplituden der höheren Ei-
genwerte z. B. logarithmische Skalierung der Ordinate,
oben Phasenwinkel-Frequenzgang.
Alternativ könnte unten auch das Format Amplitude gewählt werden und oben statt des Pha-
senwinkel-Frequenzganges die Verschiebungsgeschwindigkeit bzw. –beschleunigung darge-
stellt werden, um die Resonanzstellen der höheren Eigenwerte deutlich sichtbar zu machen.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 109 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 132: Frequenzgänge der Hauptspindelbaugruppe, Referenzpunkt vorn am Werkstück
Ergebnis gespeichert unter
Ana10S_Hauptspindelschwingung_ohneSchrauben_weicheLager.CATAnalysis.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 110 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
14 Knicken von Stäben und Beulen dünnwandiger Bauteile
Im Deutschen wird zwischen dem Knicken (Biegeknicken, Drillknicken, Biegedrillknicken/früher
Kippen) von stabförmigen Bauteilen einerseits sowie dem Beulen von Platten und schalenförmi-
gen Bauteilen andererseits unterschieden. In CATIA wird der englische Begriff Buckling Case
unter deutscher Oberfläche einheitlich „Beulprozess“ genannt, auch wenn es sich um Knicken
handelt.
14.1 Knicken von Stäben
Beim Knicken entsprechen die aus der Lösung des Eigenwertproblems berechneten Buckling
factors /„Beulfaktoren“ den Sicherheitsfaktoren gegenüber elastischem Knicken entspr. den Eu-
lerschen Knickgleichungen. CATIA weist diese „Beulfaktoren“ auch aus, wenn infolge zu kleiner
Schlankheitsgrade die Eulerschen Knickgleichungen gar nicht mehr gelten. Das kann zu unsin-
nigen Ergebnissen führen.
Die folgenden Ausführungen unter 14.1 gehören eigentlich nicht in ein Skript zu CATIA-FEM.
Weil die Studierenden des Maschinen- und Fahrzeugbaus für die Vielfalt eingesetzter Werkstoffe
kaum die erforderlichen Kenngrößen für Knickberechnungen in der Fachliteratur finden, sollen
nachfolgend dafür Näherungen angegeben und ausführlich begründet werden.
Die Eulerschen Gleichungen für elastisches Knicken gelten nur im Bereich des Hookeschen Ge-
setzes bis zur Proportionalitätsgrenze, also Dehnung bzw. Stauchung sind linear abhängig von
der Spannung. Der zugehörige Schlankheitsgrad des Druckstabes ist im Bild 133 mit P be-
zeichnet. Bei sehr kleinen Schlankheitsgraden F tritt Fließen an der Quetschgrenze des
Werkstoffes auf. Zwischen F und P kommt es zu einer Kombination aus Knicken und Fließen,
als unelastisches Knicken oder auch als elastisch-plastisches Knicken bezeichnet. Die Versa-
gensgrenze kann durch eine Gerade oder Kurve angenähert werden. Alternativ wird in den aktu-
ellen Fachbüchern „nach Tetmajer“ entgegen den Tetmajerwerten in /6/ (Tabelle 13) für
Schlankheitsgrade von Null bis P die Versagensgrenze durch eine Tetmajer-Gerade oder eine
Kurve bei Grauguss angenähert.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 111 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Stauchen „unelastisches“ bzw. elastisches Knicken (Euler) elastisch-plastisches Knicken
CATIA rechnet nur nach Eulerhyperbel
d
dP
dF
P F Schlankheitsgrad
Kn
icksp
an
nu
ng
K
bzw
. D
rucksp
an
nu
ng
F
dF KT
KE
dF zul
KT zul
KE zulP
KG
KG zul
Bild 133: Gültigkeitsbereiche für Knickberechnungen
Gültigkeitsbereich der Eulerschen Knickgleichungen und der CATIA-„Beulfaktoren“ nur
für P!
Schlankheitsgrad min
K
i
l , (25)
Kl „freie Knicklänge“, bezogen auf beidseitig gelenkig gelagerte Stütze (Fall II),
minimaler Trägheitsradius St
minmin
Ai
I , (26)
minI minimales Flächenmoment 2. Grades (früher äquatoriales Flächenträgheitsmoment),
ASt Querschnittsfläche des Knickstabes.
Die Bedingungen für die vier idealisierten Knickfälle zeigt Bild 134 mit
F Längskraft auf Knickstab,
FK Knickkraft (Kraft beim Ausknicken),
l Länge des Knickbereiches,
lK freie Knicklänge, umgerechnet auf Fall II.
KE Knickspannung nach Eulerhyperpel Stauchung = -
KT Knickspannung nach Tetmajer
KG Knickspannung als Tetmajergerade bis = 0

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 112 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
(Euler-)Fall: I II III IV
lK = 2 l lK = l lK = 2
l lK =
2
l
Bild 134: Idealisierte Einspannbedingungen und bezogene Knicklänge
Gegenüber den auf Bild 133 grafisch dargestellten Näherungen für P gibt es auch genauere
Berechnungsverfahren, z. B. nach DIN 18800 für das Bauwesen unter Berücksichtigung von Im-
perfektionen. Diese genaueren Berechnungen sind aber nur sinnvoll, wenn auch die genauen
Werkstoffkennwerte vorliegen. Diese sind für die vielen unterschiedlichen Werkstoffe des Ma-
schinen- und Fahrzeugbaus in der Regel nicht hinreichend veröffentlicht.
Nur bei duktilen Werkstoffen, wie weichen, unlegierten Stählen, lassen sich die Proportionalitäts-
und Fließ- bzw. Quetschgrenze hinreichend genau bestimmen. Bei spröderen Werkstoffen, z. B.
gehärtetem Stahl, gibt es nicht einmal eine ausgeprägte Fließgrenze. Deshalb wird diese Grenz-
spannung aus der bleibenden Verformung von 0,1 % oder 0,2 % bestimmt und vereinfachend
angenommen
für Druckspannungen dF d 0,1 bzw. dF d 0,2 ,
für Zugspannungen Re ReH Rp 0,2 .
Weil in den Normen kaum Druckspannungen angegeben sind, kann in vielen Fällen von
dF d 0,2 Rp 0,2
ausgegangen werden, nicht aber bei Grauguss, bei dem die Druckspannungen dB und d 0,2 we-
sentlich über den entsprechenden Zugspannungen liegen. Insbesondere bei Grauguss mit La-
mellengraphit gibt es eigentlich gar keine Proportionalität zwischen Spannung und Verformung.
Hookesche Gerade und E-Modul werden aus der Spannungs-Verformungskurve nur angenähert
bestimmt.
auf Fall II bezogene
frei Knicklänge lK:

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 113 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
14.1.1 Koeffizienten für die Tetmajergleichung
Die in neueren Veröffentlichungen auf die aktuellen Werkstoffe übertragenen Tetmajerkoeffizien-
ten scheinen z. T. etwas fragwürdig. Die offenbar ursprünglichen Werte sind in /6/ (bzw.
http://www.zeno.org/Lueger-1904/A/Knickfestigkeit) angegeben und in Tabelle 13 zusammenge-
stellt für die Tetmajergleichung
2KT cba für F P. (27)
Tabelle 13: Tetmajer-Werkstoffkenngrößen aus Versuchen von 1883 - 1896 nach /6/
Werkstoff E-Modul in
MPa F P a b c
Aus Tetmajerwerten abgeleitet
2,0d
dP
dP in MPa
d0,2 in MPa
Flusseisen (Rundeisen, Profilei-sen, vernietete Stäbe) mit
Rm 450 MPa
2,15 105 10 105 310 1,14 0 192,5 298,6 0,645
Flusseisen (Rundeisen, Profilei-sen, vernietete Stäbe) mit Rm > 450 MPa
2,24 105 10 105 321 1,16 0 200,5 309,4 0,648
Gusseisen (Säulenguss, Röhren-guss, Barren)
1,0 105 5 80 776 12 0,053 155 717 0,216
Bauholz (Rottanne, Weißtanne, Föhre, Lärche, Eiche)
1,0 104 1,8 100 29,3 0,194 0 9,9 29 0,341
Eine Zuordnung dieser Kenngrößen zu den aktuellen Werkstoffen ist schwierig, wie aus Tabelle 14 und Tabelle 15 ersichtlich.
Tabelle 14: Kenngrößen aktueller Stahlwerkstoffe zum Vergleich
Norm Werkstoff Mindeststreckgrenze / Streckgrenze Zugfestigkeit
Nenndicke t in mm ReH in MPa Nenndicke t in mm Rm in MPa
EN 10025-2:2004
S235.. (St 37)
16< t 40
225
3 t 100
360 - 510
S275.. (St 44) 265 410 - 560
S355.. (St 52) 345 470 - 630
E295 (St 50) 285 470 - 610
E335 (St 60) 325 570 - 710
E360 (St 70) 355 670 - 830
DIN 18800-1:2008
S235
t 40
240
t 40
360
S275 275 410
S355 360 470

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 114 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Tabelle 15: Kenngrößen aktueller Gusswerkstoffe zum Vergleich
Norm Werkstoff Probe
[mm]
Rm [MPa]
Rp0,1 / Rp0,2 [MPa]
dB [MPa]
d0,1 [MPa]
E in 10
3 MPa
EN 1561:1997
EN-GJL-150 (GG-15)
6 d 32 Vorzugsmaß
d = 20
150 - 250 98 - 165 600 195 78 - 103
EN-GJL-200 (GG-20)
200 - 300 130 - 195 720 260 88 - 113
EN-GJL-250 (GG-25)
250 - 350 165 - 228 840 325 103 - 118
EN-GJL-300 (GG-30)
300 - 400 195 - 260 960 390 108 - 137
EN-GJL-350 (GG-35)
350 - 450 228 - 285 1080 455 123 - 143
EN 1563:2005
EN-GJS-400-18 (GGG-40)
5 d 20 Vorzugsmaß
d = 14
400 (DIN 18800: 390)
250 700 169
EN-GJS-500-7 (GGG-50)
500 290 800 169
EN-GJS-600-3 (GGG-60)
600 360 870 174
Wie die aus den Tetmajerwerten berechneten Spannungen dP und dF d0,2 in Tabelle 13 zei-
gen, führten offenbar die Tetmajer-Versuche zum Werkstoffversagen im Bereich F bei dukti-
len Werkstoffen nahe der Fließgrenze dF d0,2 und beim spröden Gusseisen nahe der Bruch-
grenze dB. Die Probendurchmesser werden 20 mm betragen haben.
Tabelle 16 enthält die den aktuellen Werkstoffen zugeordneten Tetmajerkoeffizienten nach neue-
ren Quellen, z. B. Dubbel /7/, für die Tetmajergerade KG bis = 0.
Tabelle 16: Tetmajerkenngrößen aktueller Werkstoffe aus neueren Quellen
Aktuellen Werkstoffen zugeordnete Tetmajerwerte nach neueren Quellen Fließgrenze [Nennmaß]
Abgeleitete Werte
Werkstoff E-Modul in MPa
P a b c d 0,2
in MPa
dP
in MPa 2,0d
dP
S235 (St37) 2,1 105 104 310 1,14 0 235 [16] 192 0,815
E335 (St60) 2,1 105 89 335 0,62 0 335 [16] 262 0,781
5%-Ni-Stahl1
2,1 105 86 470 2,3 0 430
1 280,2 0,65
Grauguss 1,0 105 80 776 12 0,053 260
2 [30] 154,2 0,593
Bauholz 1,0 104 100 29,3 0,194 0 9,87
1) Unbekannt, welcher Ni-Stahl gemeint ist. Deshalb wird aus der Tetmajergeraden in Anlehnung an Engesser bei
F 0,2 P grob abgeschätzt d 0,2 430 MPa. Dem entsprechen etwa die Stähle nach Tabelle 17.
2) EN-GJL-200 (GG-20) EN 1561:1997 in getrennt gegossenen Proben mit 30 mm Rohgussdurchmesser
d0,1 = 260 MPa
Der aus F für Flusseisen mit Rm 450 MPa nach /6/ berechnete Wert d 0,2 300 MPa stimmt
mit den 235 MPa von S235 (St37) nicht hinreichend überein. Also ist es fraglich und deshalb zu
überprüfen, ob die Übernahme der Flusseisenkoeffizienten von Tetmajer für S235 (St37) ge-
rechtfertigt ist.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 115 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Tabelle 17: Nichtrostender Stahl mit ca. 5 % Ni und Rp0,2 = 400 – 550 MPa nach DIN EN 10088-3:2005 zum Vergleich
Werkstoff Ni Dicke,
Durchmesser Wärmebehandlung, Zugfestigkeit Rp0,2
Kurzname Nummer [%] [mm] [MPa]
X3CrNiMo13-4 1.4313 3,5 – 4,5 160 +QT700 – vergütet auf Rm = 700 – 800 MPa 520
X4CrNiMo16-5-1 1.4418 4 - 6 160 +QT760 – vergütet auf Rm = 760 – 960 MPa 550
X5CrNiCuNb16-4 1.4542 3 - 5 100 +P800 – ausscheidungsgehärtet auf Rm = 800 – 950 MPa 520
X3CrNiMoN27-5-2 1.4460 4,5 – 6,5 160 620 Rm 880 450
X2CrNiMoN22-5-3 1.4462 4,5 – 6,5 160 650 Rm 880 450
X2CrNiN23-4 1.4362 3,5 – 5,5 160 600 Rm 830 400
X2CrNiMoSi18-5-3 1.4424 4,5 – 5,2 50 700 Rm 900 450
14.1.2 Näherung für P oder dP
Aus Tabelle 13 errechnet sich für Flusseisen ein Verhältnis dP / d 0,2 0,65, aus Tabelle 16 für
Stahl dP / d 0,2 0,65 … 0,8.
Eigene Versuche mit 4 mm-Lochstempeln aus gehärtetem Werkzeugstahl X210 Cr 12 ergaben
ein Verhältnis von ca. dP / d 0,2 2000 / 2500 = 0,8 bzw. mit den maximal erreichbaren Werten
von d 0,2 3000 MPa dP / d 0,2 2000 / 3000 = 0,67.
Nach /6/, Abschnitt Knickfestigkeit (http://www.zeno.org/Lueger-1904/A/Knickfestigkeit), Glei-
chung 18, umgeschrieben in (28) auf aktuelle Größen
Fd
2
JohnsonP
E2
, (28)
schlägt Johnson dP = dF/2 d0,2/2 vor. Für dieses Verhältnis ergibt sich auch ein tangenten-
stetiger Übergang zur Eulerknickspannung.
Wenn weder Grenzschlankheitsgrade noch die Proportionalitätsgrenze bekannt sind, wird vom
Autor für Knickberechnungen von Bauteilen aus Stahl folgende Näherung vorgeschlagen:
Proportionalitätsgrenze
dP 0,65 d 0,2 0,65 Rp 0,2. (29)
Mit dem Faktor 0,65 tendiert die Berechnung zur sicheren Seite. Weil im Maschinenbau mit
großen Sicherheitsfaktoren gegenüber elastischem (Euler-)Knicken von KE = 3 … 5 (… 9)
gerechnet wird, kann dieser Faktor gegenüber dem von Johnson vorgeschlagenen noch
kleineren Wert 0,5 als ausreichend angesehen werden.
Grenzschlankheitsgrad
2,0d
P65,0
E
, (30)

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 116 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
14.1.3 Berechnung der Knickspannung im elastisch-plastischen Bereich
Für die Berechnung der Knickspannung im elastisch-plastischen Bereich werden vier Varianten
vorgestellt und miteinander verglichen.
Knickspannung für unelastisches Knicken (Bild 133) als Tetmajergerade (31) von
= F … P
PFFλλ
σσ2,0dKT für
FP
dP2,0d
(31)
und für F gilt die Fließgrenze. Mit (29) und F = 0,2 P kann (31) geschrieben werden
PFPP
2,0dKT für2,00,8
35,01
. (32)
Knickspannung für unelastisches Knicken nur als Tetmajergerade von = 0 … P (Bild 133)
P2,0dKG fürP
dP2,0d
(33)
und mit (29)
PP
2,0dKG für35,01
. (34)
Knickspannung für unelastisches Knicken als Cosinusfunktion von = 0 … P ohne tangen-
tenstetigen Übergang zur Eulerhyperbel
P2,0d
dP
P2,0dcosK fürcosarccos
(35)
Knickspannung für unelastisches Knicken als Polynom 4. Grades von = 0 … P mit tangen-
tenstetigem Übergang zur Eulerhyperbel
P
4
P
3
P
2
P2,0d4K fürrqp1
, (36)
mit den Koeffizienten p, q und r für dP = 0,65 d0,2 nach (29)
P
4
P
3
P
2
P2,0d4K für39,017,013,01
(37)
Unbedingt beachten, dass die Mindeststreckgrenzen d 0,2 mit zunehmenden
Querschnittsabmessungen kleiner werden!
(Vgl. z. B. DIN EN 10025 Baustähle, DIN EN10083 Vergütungsstähle, DIN EN 10293 Stahlguss,
DIN EN 1561 Gusseisen mit Lamellengraphit, DIN EN 1563 Gusseisen mit Kugelgraphit, DIN EN
10088-3 Nichtrostender Stahl.)

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 117 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
1 Tetmajer Flusseisen
Rm 450 MPa
2 Tetmajer Flusseisen Rm > 450 MPa
3 Temajergerade bis F nach (32)
4 Temajergerade bis
= 0 nach (34)
5 Cosinusfunktion nach (35)
6 Polynom 4. Grades nach (37)
7 Fehlerhafte Tetmajer-
gerade bis = 0 nach aktuellen Fachbüchern
E Eulerhyperbel für
E = 2,1 105 MPa
Bild 135: Knickspannungen für S235 nach verschiedenen Ansätzen und Vergleich mit den Tet-majerwerten für „Flusseisen“
Aus Bild 135 folgt:
Der Berechnungsaufwand für das Polynom 4. Grades mit tangentenstetigem Übergang zur
Eulerhyperbel nach (37) ist bei den vielen Unsicherheiten hinsichtlich der Werkstoffkenngrö-
ßen nicht gerechtfertigt.
Die in aktuellen Fachbüchern, z. B. /7/, angegebenen Tetmajerkoeffizienten für S235 erge-
ben fehlerhafte Knickspannungen weit über der Mindestfließgrenze von S235.
Ein gutes Verhältnis von Berechnungsaufwand zu Ergebnis liefern die Ansätze nach (32)
(34), und (35). Der Autor bevorzugt (32).
14.1.4 Zulässige Knickspannung
Im Maschinenbau wird mit großen Sicherheitsfaktoren gegenüber elastischem (Euler-)Knicken
von KE = 3 … 5 (… 10) gerechnet. Dagegen sind die Sicherheitsfaktoren gegenüber der
Quetschgrenze F wesentlich kleiner, meist zwischen 1,2 und 2. Im elastisch-plastischen Bereich
sollten deshalb die Sicherheitsfaktoren von KE bei P auf F bei F bzw. 0 abnehmen. Für linea-
re Abnahme der Sicherheitsfaktoren gilt
PFFFP
FKEFKT für)(
(38)

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 118 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
bzw. PP
FKEFKG für)(
. (39)
Damit errechnen sich die zulässigen Spannungen beispielsweise:
für die Tetmajergerade gem. (31)
PFFλλ
σσ
F
2,0dzulKT für
FP
KE
dP
F
2,0d
, (40)
für die Geradengleichung gem. (33) mit (29)
PP
KEF
F2,0dzulKG für
65,01
1
. (41)
Sp KG zul KG zul nach . (41) mit Sicherheit () entspr. linearer Si KG nach (39)
Sp KT zul KT zul nach (40) mit Sicherheit () entspr. linearer Si KT nach (38)
Sp KG zul sin KG zul sin mit Sicherheit () entspr. sinusmodifizierter Si KG sin nach (44)
Sp KT zul sin KT zul sin mit Sicherheit () entspr. sinusmodifizierter Si KT sin nach (42) Sp E Euler-Knickspannung
Sp zul E zulässige Eulerknickspannung mit KE = 5
P1, P2 Punkte zur Kennzeichnung des Grenzschlankheitsgrades P
Bild 136: Varianten zur Berechnung der zulässigen Knickspannungen

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 119 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Wie aus Bild 136 ersichtlich, schneiden die Geraden der zulässigen Spannungen KGzul und
KTzul bei linearer Anpassung der Sicherheitsfaktoren die Kurve der zulässigen Eulerknickspan-
nung. Für praktische Belange dürfte das vertretbar sein. Wenn das nicht akzeptiert wird, muss
ein nichtlinearer Übergang von F zu KE gewählt werden, z. B. die Überlagerung mit einer Sinus-
funktion. Die Gleichungen (42) und (44) zeigen zwei Ansätze mit einem Amplitudenfaktor m zum
Modifizieren Sicherheitskurve KTsin() bzw. KGsin().
PFFKE
FP
FKTF
FP
FKEFsinKT für
2180sinm)(
, (42)
für F = 0,2 P FP
FKEKT 3m
. (43)
Wenn die Tetmajergerade bis = 0 gehen soll, kann der Sicherheitsfaktor aus (44) berechnet
werden.
PFKE
PKG
P
FKEFsinKG für
2180sinm)(
(44)
mit P
FKEKG 4m
(45)
14.2 Knickberechnung in CATIA
Vor der Knickberechnung muss ein statischer Prozess berechnet werden, von dem die Lasten
und Lagerungsbedingungen für den Knickprozess übernommen werden (Bild 137).
Nachdem bei der statischen Berechnung ggf. zunächst mit linea-
rer Vernetzung das Modell überprüft wurde, ist für Knickberech-
nungen unbedingt der Elementtyp mit parabolischer Vernetzung
(TE10-Elemente) zu verwenden.
Die Ergebnisse der Knickberechnung sind stark abhängig von den
Netzgrößen und extrem von den Lagerungsbedingungen.
Schrittfolge der Knickberechnung:
1. Befehl aus Kopfleiste Einfügen > Beulprozess [Insert > Buckling case].
2. Eingabefenster Beulprozess [Buckling Case] (Bild 137) > Cursor in das Eingabefeld Refe-
renz und Mausklick im Baum auf Lösung für statischen Prozess [Static Case Solution]. Da-
mit werden Lasten und Einspannbedingungen des statischen Prozesses für die Knickbe-
rechnung übernommen und der „Beulprozess“ im Baum eingefügt (Bild 138).

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 120 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 137: Randbedingungen, Lasten und Lösung des statischen Prozesses
Bild 138: Generierter Baumeintrag
3. Doppelklick im Baum auf Lösung für Beulprozess. 1 [Buckling Case Solutions.1] > Fenster
Parameter der Lösung für den Beulprozess.
Bild 139: Parameterfenster mit Eingabemöglichkeit für die Anzahl der zu berechnenden Eigen-werte
Für einen Knickstab interessiert insbesondere der 1. Eigenwert, die Berechnung der ersten drei
Eigenwerte sollte genügen.
Das Beispielmodell für die Bilder wurde in R19 erstellt. Damit auch mit älteren Releases arbei-
tende Nutzer die Modelle öffnen können, ist noch eine R14-Variante erarbeitet worden. Diese
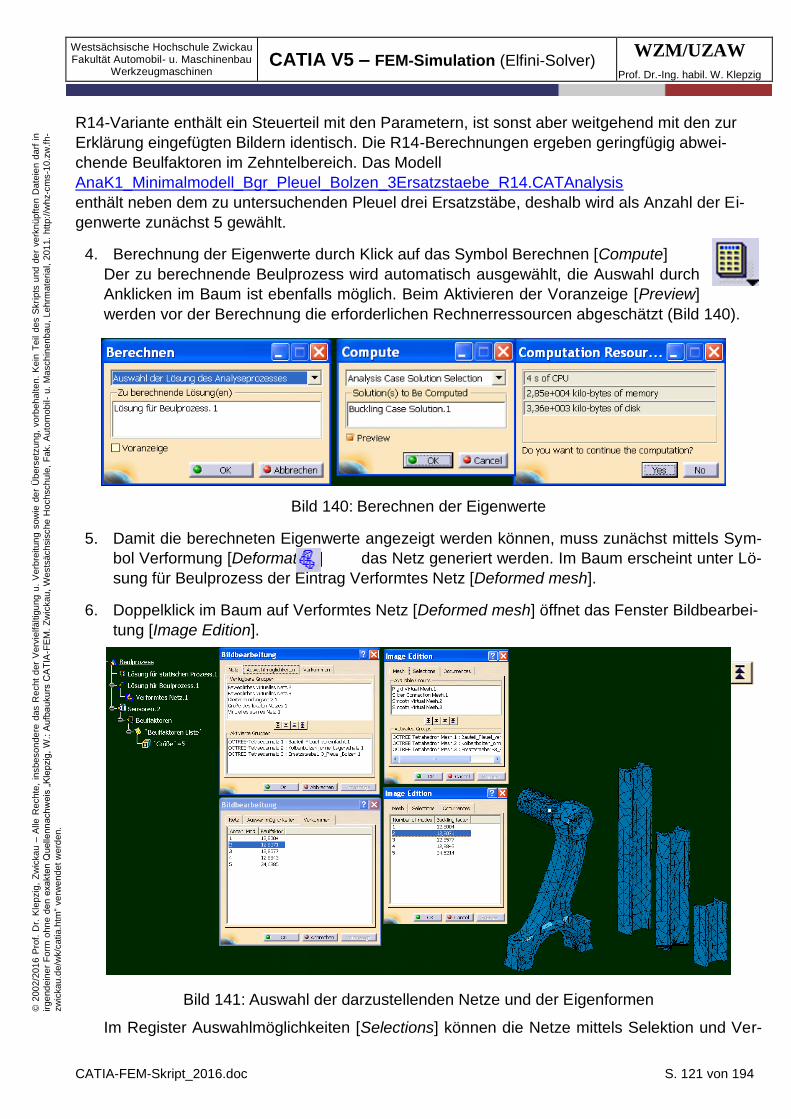
Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 121 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
R14-Variante enthält ein Steuerteil mit den Parametern, ist sonst aber weitgehend mit den zur
Erklärung eingefügten Bildern identisch. Die R14-Berechnungen ergeben geringfügig abwei-
chende Beulfaktoren im Zehntelbereich. Das Modell
AnaK1_Minimalmodell_Bgr_Pleuel_Bolzen_3Ersatzstaebe_R14.CATAnalysis
enthält neben dem zu untersuchenden Pleuel drei Ersatzstäbe, deshalb wird als Anzahl der Ei-
genwerte zunächst 5 gewählt.
4. Berechnung der Eigenwerte durch Klick auf das Symbol Berechnen [Compute]
Der zu berechnende Beulprozess wird automatisch ausgewählt, die Auswahl durch
Anklicken im Baum ist ebenfalls möglich. Beim Aktivieren der Voranzeige [Preview]
werden vor der Berechnung die erforderlichen Rechnerressourcen abgeschätzt (Bild 140).
Bild 140: Berechnen der Eigenwerte
5. Damit die berechneten Eigenwerte angezeigt werden können, muss zunächst mittels Sym-
bol Verformung [Deformation] das Netz generiert werden. Im Baum erscheint unter Lö-
sung für Beulprozess der Eintrag Verformtes Netz [Deformed mesh].
6. Doppelklick im Baum auf Verformtes Netz [Deformed mesh] öffnet das Fenster Bildbearbei-
tung [Image Edition].
Bild 141: Auswahl der darzustellenden Netze und der Eigenformen
Im Register Auswahlmöglichkeiten [Selections] können die Netze mittels Selektion und Ver-

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 122 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
schiebepfeilen als Aktivierte Gruppen für die Anzeige ausgewählt werden.
Im Register Vorkommen [Occurrences] wird der Eigenwert gewählt und damit die zugehörige
Eigenform angezeigt. Vorkommen [Occurrences] sollen die Knicksicherheiten sein, die aller-
dings nur zutreffen, wenn der Knickstab ausreichend schlank ist.
Nach Modifikationen an Bauteilen, z. B. Längenänderung der Ersatzstäbe, nur mit der rechten
Maustaste auf den Baumeintrag Sensoren des Beulprozesses klicken und im Auswahlfenster
„Alle Sensoren aktualisieren“ auswählen. Dann werden die Vorkommen neu berechnet.
Es ist zu empfehlen, vor Datei > Sicherungsverwaltung [File > Save Management] die Berech-
nungs- und Ergebnisdaten zu löschen, zumindest aber die Berechnungsdaten.
Bild 142: Löschen des externen Speichers
14.3 Beispielmodell Knickberechnung Pleuel
14.3.1 Minimalmodell
Ausgehend von einer Baugruppe mit Kurbelzapfen, Kurbelzapfenlagerschalen, Pleuel, Pleuelau-
genbuchse, Kolbenbolzen und Kolben(imitation) wurde eine große Zahl von Modellen überprüft
mit dem Ziel, ein der kompletten Baugruppe hinreichend entsprechendes Minimalmodell für die
Überprüfung der Knicksicherheit des Pleuelschaftes zu finden.
Für statische Berechnungen wurden zunächst Presspassverbindungen zwischen Pleuelbohrun-
gen und Lagerschalen bzw. -buchse sowie Kontaktverbindungen zwischen Kolbenbol-
zen/Pleuelaugenbuchse und Kurbelzapfen/Lagerschalen erzeugt. Diese Verbindungen sind aber
bei Beulprozessen nicht möglich.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 123 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 143: Verschiebungen von Pleuelauge, Pleuelaugenbuchse und (seitlich versetzt dargestell-tem) Kolbenbolzen bei eingespanntem Pleuelschaft und Lasteinleitung am Kolben
Die Verschiebungen im Bild 143 machen deutlich, dass infolge der Kantenpressungen eine ge-
wisse Fixierung des Pleuelauges gegenüber Verschiebungen in Richtung der Augenachse ent-
steht. Diese „Fixierung“ bei Kontaktbedingungen kann bei Beulprozessen kaum nachgebildet
werden. Mit Federverbindungen wäre das zwar näherungsweise möglich, aber der Aufwand zur
Bestimmung der Federzahlen wäre zu hoch.
Für das Pleuel-Minimalmodell zur Knickberechnung konnte keine Konfiguration gefunden wer-
den, die ohne Kolbenbolzen das Verhalten der kompletten Baugruppe auch nur annähernd ab-
bildet. Deshalb wird nachfolgend beschriebenes Minimalmodell empfohlen.
Pleuelschaft bis zur Trennfläche der Kurbelzapfenbohrung, ggf. vereinfacht durch Weglassen
kleiner Verrundungen, Fasen, Ölbohrungen u. a.
Kolbenbolzendurchmesser vergrößert auf den Außendurchmesser der Pleuelaugenbuchse.
Die Kolbenbolzenbohrung könnte so vergrößert werden, dass sich eine gleiche Biegesteife
wie beim Originalkolbenbolzen ergibt.
Zur Krafteinleitung über den Kolbenbolzen statt über den Kolben werden im Bereich der Kol-
benaugen zylindrische Flächen in den Kolbenbolzen „ohne Vereinfachung der Geometrie in-
tegriert“ (Bild 144).

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 124 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 144: Fläche integrieren [Sew Surface] – Kolbenbolzen mit integrierten Flächen Extrudieren.1 und Symmetrie.1
FEM-Modell (Statischer Prozess [Static Case])
OCTREE-Tetraedernetz des Pleuels ggf. in Teilberei-
chen lokal feiner vernetzen, im Beispiel den Bereich um
die kleine Nut in der Pleuelfußbohrung.
Bild 145: Lokal feinere Vernetzung der Nutflächen
Feste Einspannung der beiden Pleueltrennflächen im Pleuelfußlager.
Analyse Allgemeiner Verbindungen [General Analysis Connection],
Erste Komponente: Kolbenbolzenzylinder in der Mitte (Bild 146),
Zweite Komponente: Zylinderfläche(n) der Pleuelaugenbohrung.
Bild 146: Analyseverbindung Kolbenbolzen – Pleuelau-genbohrung
Gleitverbindung [Slider Connection Property] zwischen Pleuelaugenbohrung und Kol-
benbolzen,
als Stützelemente [Supports] die Analyseverbindung im Baum selektieren (Bild 147).

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 125 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 147: Gleitverbindung im Pleuelauge
Bewegliches virtuelles Teil [Smooth Virtuell Part] auf rechte Kolbenbolzenstirnfläche.
Bild 148: Bewegliche virtuelle Teile auf rechte Bolzenstirnflächen
Bewegliches virtuelles Teil [Smooth Virtuell Part] auf linke Kolbenbolzenstirnfläche.
Benutzerdefinierte Randbedingungen [User-defined Restraints] erzeugen gem. Bild 149
für die beweglichen virtuellen Teile an der rechten und der linken Bolzenstirnfläche.
Bild 149: Benutzerdefinierte Randbedingungen für die beweglichen virtuellen Teile an den Stirnflächen des Kolbenbolzens
Knickkraft als Verteilte Last [Distributed Force] auf die durch die
Flächenintegration abgegrenzten seitlichen Zylinderflächen des Kol-benbolzens aufbringen (Bild 150) oder als nicht auf die Knoten wirken-
de Dichte der Kraft [Force Density] im R14-Modell.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 126 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 150: Knicklast als Verteilte Last auf rechter und linker Teilfläche des Kolbenbolzens
Berechnen der Lösung des Statischen Prozesses entweder mittels Symbol Berechnen [Compute] oder
mit rechter Maustaste auf Baumeintrag Sensoren [Sensors] und im sich öffnenden Fenster
Alle Sensoren aktualisieren [Update All Sensors] selektieren.
Danach kann der Beulprozess gem. Punkt 14.2 eingefügt werden.
14.3.2 Ersatzstab zur Bewertung der Gültigkeit von CATIA berechneter Knicksicherheiten (Beulfaktoren)
Damit der Schlankheitsgrad des Pleuels als Kriterium für die Gültigkeit der von CATIA berechne-
ten Knicksicherheiten schnell abgeschätzt werden kann, wird in einem neuen Bauteil der Pleuel-
baugruppe ein Ersatzstab mit konstantem Querschnitt erzeugt. Die Länge dieses Knick-
Ersatzstabes ist iterativ so zu modifizieren, bis die von CATIA berechneten Knicksicherheiten
von Pleuel und Ersatzstab etwa gleich sind. Dann kann der dem Pleuel entsprechende Schlank-
heitsgrad des Ersatzstabes berechnet werden und ggf. auch die Knickkraft bzw. Knicksicherheit
im elastisch-plastischen Bereich (z. B. Tetmajer).
Im Beispielmodell werden in einer Baugruppe neben Pleuelschaft und Kolbenbolzen 3 Ersatz-
stäbe für die Lastfälle I bis III verwendet, um die Modellierung der Randbedingungen zu zeigen.
Außerdem sollen die Ersatzstablängen über Parameter modifiziert und die Schlankheitsgrade
gleich berechnet werden.
Voreinstellungen
Für die Knickberechnungen der Pleuelstange und Ersatzstäbe sind die Voreinstellungen wie folgt
anzupassen.
Tools > Optionen > Infrastruktur > Teileinfrastruktur > Register Allgemein [Tools > Options >
Infrastructure > Part Infrastructure > Register General]
Aktualisieren Automatisch [Update Automatic].
Tools > Optionen > Infrastruktur > Teileinfrastruktur >v Register Anzeige [Tools > Options >
Infrastructure > Part Infrastructure > Register Display].

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 127 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Es muss die Anzeige der Externen Verweise, der Bedingungen, der Parameter, und der Be-
ziehungen im Baum gesetzt sein (Bild 151).
Bild 151:
Optionen für die Anzeige im Struk-
turbaum
Querschnitt und Länge des Ersatzstabes
Der Querschnitt des Ersatzstabes wird in der Umgebung Generative Shape Design (Wireframe
and Surface Design) aus dem Pleuelschaft im Part Vergleichskörper abgeleitet. Der Schnittebe-
nenabstand von der Trennfläche des Pleuelfußes soll mittels Parameter schnell modifizierbar
sein.
1. Formel für Schnittebenenabstand erzeugen:
Tools > Formel [Formula] oder Symbol > Neuer Parameter des Typs Länge
Mit Einem Wert : Abstand_Schnittebene_von_Kurbelzapfenmitte 65 mm im Modell.
2. Verschneidungskurve zwischen Pleuelschaft und Schnittebene:
Einfügen > Drahtmodell > Verschneiden [Insert > Wireframe > Intersection] oder Symbol
Bild 152: Erzeugen der Profilkurve für den Ersatzstab aus dem Pleuelschaft

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 128 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
3. Verschieben der Schnittkurve neben den Pleuelschaft Einfügen > Operationen > Verschieben [Insert > Operations > Translate] oder Symbol .
4. Projizieren der verschobenen Körperprofilkurve auf die Ebene der Pleuelfußtrennung, im
Beispielmodell die x-y-Ebene Einfügen > Drahtmodell > Projektion [Insert > Wireframe > Projection] oder Symbol
Bild 153: Projektion der Profilkurve
5. Vor Erzeugen des Ersatzstabkörpers dessen Länge als Formel Laenge_Vglstab definieren.
6. In der Umgebung Part Design Block [Pad] des Ersatzstabes erzeugen, als Länge mittels
Schalter den benutzerdefinierten Parameter Laenge_Vglstab zuweisen.
Bild 154: Ersatzstab mit Zuweisung eines benutzerdefinierten Parameters als Länge
Schlankheitsgrad des Ersatzstabes
Der Schlankheitsgrad des Ersatzstabes wird auf der Basis der Messung des Flächenmoments 2.
Grades (früher äquatoriales Flächenträgheitsmoment) berechnet. Im Beispielmodell dient dazu
die Füllfläche der Verschneidungskurve des Pleuelschaftquerschnittes. Es wäre aber auch die
untere Stirnfläche des Ersatzstabes möglich.
Die Messung wird mittels Symbol Trägheit messen [Measure Inertia] ausgelöst.
Unter dem Schriftzug Definition ist der rechte Schalter Trägheit von 2D-Elementen messen
[Measure Inertia 2D] zu selektieren.
Mit Anpassen [Customize ] gem. Bild 155 und Anwenden [Apply] können die Einträge im Baum
auf das Erforderliche begrenzt werden.
Messung beibehalten [Keep measure] ist zu wählen.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 129 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 155: Trägheit messen und Anpassen [Measure Inertia und Customize]
Der benutzerdefinierte Parameter Schlankheitsgrad wird mit dem Formeleditor erzeugt.
Tools > Formel [Formula] oder Symbol > Neuer Parameter des Typs Reelle Zahl
Formel hinzufügen gem. (25) und (26). Die nachfolgende Formel gilt für Fall I mit lK = 2l.
Laenge_Vglstab_Fall1*2 *sqrt(`2D-Trägheitsfläche.1\Bereich` /`2D-Trägheitsfläche.1\M1`)
Grün gekennzeichnete Parameter Fläche (Bereich) und minimales Flächenmoment 2. Grades
(M1) im Baumzweig Messung [Measure] selektieren.
Im Beispielmodell sind die Parameter für drei Ersatzstäbe
definiert. Das Bild 156 zeigt die Parameter nach der iterativen
Modifikation der Ersatzstablängen. Die Schlankheitsgrade
sind für alle drei Lagerungsfälle I bis III bei nahezu gleichen
Beulfaktoren ebenfalls nahezu identisch.
Bild 156: Definierte Parameter
Randbedingungen für die Ersatzstäbe
Fall I: Feste Einspannung [Clamp] auf untere Stirn-
fläche
Fall II. Die gelenkige Lagerung der unteren Stirnflä-
che ist mit einer unmittelbar auf die Fläche
bezogenen benutzerdefinierten Randbedin-
gung nicht möglich. Die Einschränkung der 3.
Verschiebung wirkt wie eine feste Einspan-
nung. Es muss erst ein, z. B. starres, virtuel-
les Teil [Rigid Virtual Part] auf der unteren
Stirnfläche platziert und diesem die benutzer-
definierte Randbedingung [User-defined Rest-
raint] zugewiesen werden.
Bild 157: Modellierung des unteren Gelenks Fall II

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 130 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Das obere Schub-Drehgelenk kann als benutzerdefinierte Randbedingung direkt auf der Stirnflä-
che modelliert werden.
Bild 158: Modellierung des oberen Ge-lenks Fall II
Fall III: Unten feste Einspannung wie Fall I, oben Schub-Drehgelenk wie Fall II.
14.3.3 Auswertung der Knickberechnung des Pleuels
Die mittlere Druckspannung im Pleuelschaft und den Ersatzstäben errechnet sich bei einer an-
genommenen Druckkraft Fz = - 40 kN zu
MPa6,195mm5,204
N40000
schnittsPleuelquerdesFläche
enKolbenbolzaufDruckkraft2v orhd .
Im Teil Steuerteil_Bgr_Pleuel_3Ersatzstaebe_R14.CATPart der Pleuelbaugruppe zum Modell
AnaK1_Minimalmodell_Bgr_Pleuel_Bolzen_3Ersatzstaebe_R14.CATAnalysis wurden mit dem
Formeleditor die Parameter der Schlankheitsgrade Lambda erzeugt und mit Formeln berechnet.
Mit den dem Pleuelschaft entsprechenden Knicksicherheiten (Beulfaktoren) von 12,8 (Bild 141)
haben die Ersatzstäbe Schlankheitsgrade von = 27 (Bild 156).
Wie zu erwarten, ist die aus der von CATIA berechneten Knicksicherheit (Beulfaktor) für den
Pleuelschaft berechnete Knickspannung
K CATIA = K vorh Beulfaktor = 195,6 12,8 = 2504 MPa
viel größer als die Streckgrenze von Pleuelwerkstoffen.
Für geschmiedete Pleuel werden z. B. die AFP-Stähle mit besonders hoher Streckgrenze nach
dem Ausscheidungshärten verwendet:
27MnVS6 mit Rp0,2 450 MPa für konventionell spanend bearbeitete Pleuelfußtrennflächen,
36MnVS4 mit Rp=,2 750 MPa als neuer Werkstoff für gecrackte Pleuelfußtrennflächen.
Wird mangels vorliegender Kenngrößen gem. (29) dP 0,65 d 0,2 0,65 Rp 0,2 und F = 0,2 P
angenommen, errechnen sich die im Bild 159 eingezeichneten Tetmajer-Knickspannungen mit
(32).

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 131 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Daraus folgen für den vorhandenen Schlankheitsgrad = 27:
27MnVS6 KT 27 = 426 MPa Knicksicherheit 2,2196
426
v orhd
27KTK
36MnVS4 KT 27 = 680 MPa Knicksicherheit 5,3196
680
v orhd
27KTK
Bild 159: Knickspannungen gem. CATIA Beulfaktoren und Tetmajer-Knickspannungen für zwei Pleuelwerkstoffe
Eigentlich wäre eine Berechnung dieser Pleuelbaugruppe mit Simulia/Abaqus notwendig, um die
vom Autor vorgeschlagene Methode zur näherungsweisen Berechnung des Knickens mit CATIA
zu verifizieren. Leider hat der Autor auf dieses Programm keinen Zugriff.
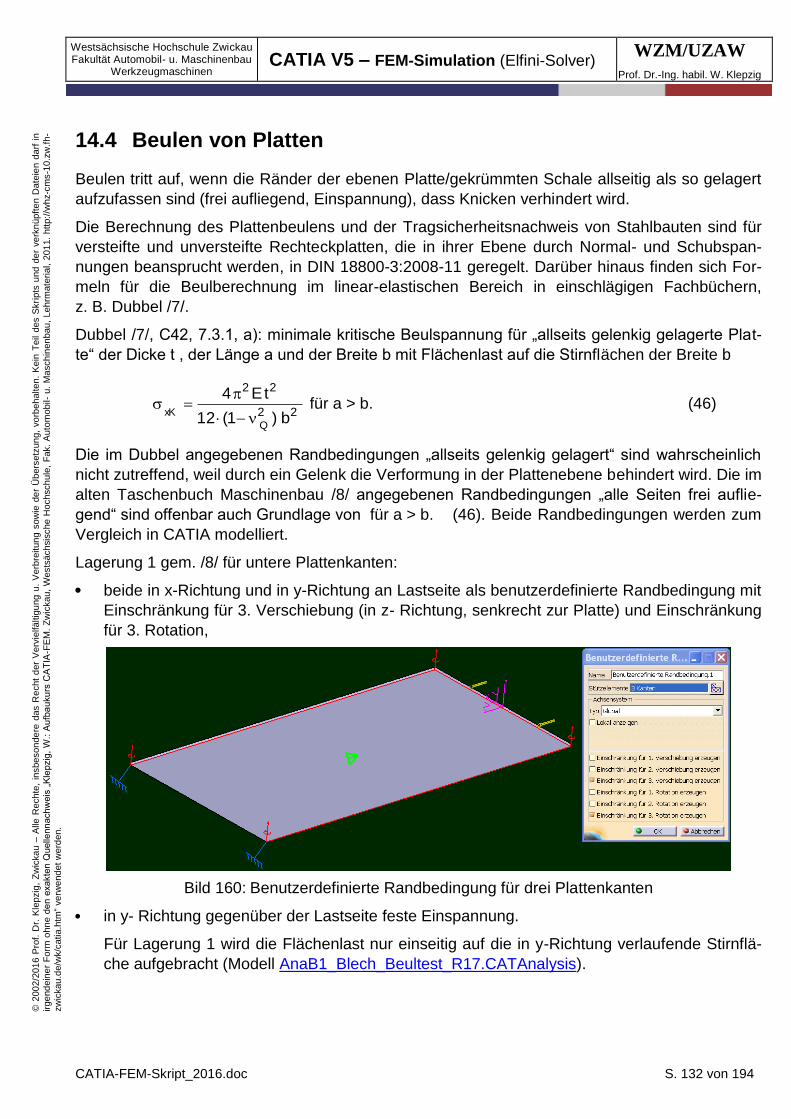
Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 132 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
14.4 Beulen von Platten
Beulen tritt auf, wenn die Ränder der ebenen Platte/gekrümmten Schale allseitig als so gelagert
aufzufassen sind (frei aufliegend, Einspannung), dass Knicken verhindert wird.
Die Berechnung des Plattenbeulens und der Tragsicherheitsnachweis von Stahlbauten sind für
versteifte und unversteifte Rechteckplatten, die in ihrer Ebene durch Normal- und Schubspan-
nungen beansprucht werden, in DIN 18800-3:2008-11 geregelt. Darüber hinaus finden sich For-
meln für die Beulberechnung im linear-elastischen Bereich in einschlägigen Fachbüchern,
z. B. Dubbel /7/.
Dubbel /7/, C42, 7.3.1, a): minimale kritische Beulspannung für „allseits gelenkig gelagerte Plat-
te“ der Dicke t , der Länge a und der Breite b mit Flächenlast auf die Stirnflächen der Breite b
22
22
b)1(12
tE4
Q
xK
für a > b. (46)
Die im Dubbel angegebenen Randbedingungen „allseits gelenkig gelagert“ sind wahrscheinlich
nicht zutreffend, weil durch ein Gelenk die Verformung in der Plattenebene behindert wird. Die im
alten Taschenbuch Maschinenbau /8/ angegebenen Randbedingungen „alle Seiten frei auflie-
gend“ sind offenbar auch Grundlage von für a > b. (46). Beide Randbedingungen werden zum
Vergleich in CATIA modelliert.
Lagerung 1 gem. /8/ für untere Plattenkanten:
beide in x-Richtung und in y-Richtung an Lastseite als benutzerdefinierte Randbedingung mit
Einschränkung für 3. Verschiebung (in z- Richtung, senkrecht zur Platte) und Einschränkung
für 3. Rotation,
Bild 160: Benutzerdefinierte Randbedingung für drei Plattenkanten
in y- Richtung gegenüber der Lastseite feste Einspannung.
Für Lagerung 1 wird die Flächenlast nur einseitig auf die in y-Richtung verlaufende Stirnflä-
che aufgebracht (Modell AnaB1_Blech_Beultest_R17.CATAnalysis).

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 133 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Lagerung 2 gem. /7/ für untere Plattenkanten:
beide in x-Richtung als benutzerdefinierte Randbedingung mit Einschränkung für 2. und 3.
Verschiebung (in z- Richtung, senkrecht zur Platte) sowie Einschränkung für 2. und 3. Rota-
tion,
beide in y-Richtung als benutzerdefinierte Randbedingung mit Einschränkung für 1. und 3.
Verschiebung (in z- Richtung, senkrecht zur Platte) sowie Einschränkung für 1. und 3. Rota-
tion.
Für Lagerung 2 wird die Flächenlast beidseitig auf die die in y-Richtung verlaufenden Stirn-
flächen aufgebracht.
Lagerung 2b, etwas abweichend von /7/, wie Lagerung 2, aber eine Kante in y-Richtung nur mit
Einschränkung für 3. Verschiebung sowie Einschränkung für 1. und 3. Rotation.
Die CATIA-Berechnung gilt wie beim Knicken ausschließlich für den linear-elastischen Bereich.
Als Flächenlast wird die nach für a > b. (46) berechnete Beulspannung für den ersten Eigen-
wert gewählt. Der kleinste Beulfaktor sollte also ca. 1 sein.
Mit den Größen E = 205000 MPa Querkontraktionszahl Q = 0,3
t = 3 mm a = 400 mm b = 200 mm
wird MPa167753,166200)3,01(12
320500042
22
21krit
.
Für die Gültigkeit der CATIA-Beulfaktoren muss die Bedingung erfüllt sein
dP vorh Beulfaktor = krit1 Beulfaktor.
In nachfolgender Tabelle sind die von CATIA berechneten Beulfaktoren in Abhängigkeit der
Netzgröße angegeben. Die Stirnflächen der Platte wurden mit der lokalen Netzgröße t/4 vernetzt.
Tabelle 18: Abhängigkeit der Beulfaktoren von der Netzgröße (R19-Modell)
t a b p = krit1
Dubbel
Netzgröße Beulfaktoren
Lagerung 1 /8/
Beulfaktoren
Lagerung 2 /7/ falsch
Beulfaktoren
Lagerung 2b falsch
mm mm mm MPa mm 1. 2. 3. 1. 2. 3. 1. 2. 3.
3 400 200 166,753 25 mm
(CATIA)
1,197 1,450 1,724
3 400 200 166,753 12 1,015 1,211 1,535 3.405 4,223 4,994 1,248 1,344 1,675
3 400 200 166,753 8 1,010 1,201 1,527
3 400 200 166,753 5 1,010 1,197 1,525
3 400 200 166,753 5 linear 4,808 5,559 7,341
Beulfaktor p > dP, also nicht mehr im linear-elastischen Bereich für S355 mit dP = 0,65 345 MPa = 224 MPa.
Die von CATIA beim Start der Generative Structural Analysis automatisch generierte Netzgröße
von ca. 25 mm war etwas zu groß. Bei einem halb so großen Netz von 12 mm wurde der erste
Eigenwert mit den Lagerungsbedingungen gem. /8/ schon sehr genau berechnet.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 134 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 161: Ergebnis der Beulberechnung bei Netzgröße 12mm, Lagerung 1 nach /8/, R19-Modell
Wie erwartet, sind die im Dubbel /7/ angegebenen Randbedingungen falsch.
Dass eine lineare Vernetzung für Beulberechnungen völlig ungeeignet ist, verdeutlichen die in
grüner Schrift eingetragenen Werte der unteren Tabellenzeile.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 135 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
15 Ebene Tragwerke und Raumtragwerke
Beim Modellieren mit Trägern können nur die Verformungen und die Hauptspannungstensoren in
Trägerrichtung angezeigt werden, also nur Zug- und Druckspannungen ohne Berücksichtigung
erhöhter Randspannungen durch Biegung. Für Anwendungen des Fahrzeug- und Maschinen-
baus ist das in der Regel unzureichend. Deshalb werden nur wenige Hinweise zum Modellieren
mit Trägern gegeben.
Material möglichst gleich im Part den Geometrieelementen im Baum zuweisen.
Grundsatz: Symmetrisch aufgebaute und belastete Tragwerke nur bis zu den Symmetrie-
ebenen modellieren.
Für das Modellieren mit 1D-Trägern wird empfohlen:
Statt der praxisgerechten Modellierung des Tragwerks als Baugruppe mit den Trägerstü-
cken als Einzelteile möglichst viele Trägerstücke in „Berechnungs-Bauteil(en)“ modellieren
und möglichst viele Linien der Trägerbereiche gleichen Profilquerschnitts zu Linienzügen
zusammenfassen (Zusammenfügen o. Polylinien), um die Zahl der Kopplungsbedingungen
zwischen den Bauteilen sowie Linienzügen zu minimieren. Achtung, Profilausrichtung darf
zu keiner Teillinie parallel sein! Also Linienzug nicht in allen 3 Achsrichtungen.
Ggf. Achsensysteme auf ausgewählten Linien erzeugen zum Ausrichten der Profile und von
Sensoren.
Bild 162: Netz PV1 der Polylinie eine 1D-Eigenschaft des Typs „Dünner Träger“ zuweisen
Den Netzen der Linienzüge 1D-Eigenschaften zuweisen, im Bild 162 am Beispiel der Polyli-
nie_Verb1_viol.
Stützelemente: Netz PV1 im Baum selektieren.
Typ: Dünner Rahmenträger > Klick auf Schraubenschlüsselsymbol > Profilabmessungen
eingeben.
Ausrichtung: Linie selektieren, welche die lokale y-Achse zur Ausrichtung des Profils be-
stimmt, im Bild 162 die z-Achse des Koordinatensystems.
Eintrag der 1D-Eigenschaft im Baum.
Definieren von Verbindungen zwischen den Elementknoten (Scheitelpunkten).

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 136 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Zwischen den Elementknoten eine „Analyse allgemeiner Verbindungen“ erzeugen .
Auswahl der Elementknoten mittels Lupe (Alt + LMT-Klick) vornehmen.
Bild 163: Verbindungen zwischen Scheitelpunkten mit Hilfe der Auswahllupe
Danach dieser Analyseverbindung „Eigenschaft der benutzerdefinierten entfernten Verbin-
dung“, in der Regel Mitte „Starr“ zuweisen.
Bild 164: Benutzerdefinierte Verbindung auf Analyseverbindung zwischen Scheitelpunkten
Bei Modellen mit Begrenzung an der Symmetrieebene den Scheitelpunkten an Symmetrie-
ebenen (grün im Bild 165) „Benutzerdefinierte Randbedingung“ analog einem Flächenlosla-
ger zuweisen.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 137 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 165: Randbedingungen an Sym-metrieebenen
Nach der Definition der Randbedingungen zum Binden der Freiheitsgrade der Struktur und der
Lasten können die Verschiebungen und Hauptspannungstensoren berechnet werden. Wegen
der asymmetrischen Lasten (Bild 166) ist der komplette Rahmen zu modellieren.
Bild 166: Translationsverschiebung Trägermodell und Solidmodell
Die berechneten Verschiebungen von Träger- und Solidmodell stimmen weitgehend überein.
Bild 167: Hauptspannungstensorkomponenten C11 des Trägermodells und des Solidmodells
Dagegen sind die berechneten Hauptspannungen C11 des Solidmodells wesentlich größer als

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 138 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
die für das Trägermodell. Noch etwas größer sind die von Mises-Spannungen (Bild 168).
Bild 168: von Mises-Spannungen
Beispielmodelle:
Ana20_Rahmenstruktur_1D_R17_Al.CATAnalysis,
Ana21_Solid_20mm_R17_Al.CATAnalysis.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 139 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
16 Anwendungen mit Advanced Meshing Tools
16.1 Befehle, Stand R14 bis R20
Ab R16 sind einige zusätzliche Möglichkeiten gegeben und teilweise haben sich die Symbolleis-
ten etwas verändert. Im Skript können nicht alle Optionen erklärt werden. Dazu finden sich In-
formationen in der CATIA-Hilfe, z. B. …\B19doc\German\online\German\fmsug_C2.
Ansicht der Symbolleisten
außerhalb der Netzbearbeitung bei aktiver Netzbearbeitung bis zum Beenden
16.1.1 Netztypen auswählen
Symbolleiste Vernetzungsmethoden [Meshing Methods]
Vernetzung mit Trägern [Beam Mesher]
Flächennetzerzeugung [Surface Mesher]
Tetraederfüllung [Tetrahedron Filler]
Flächennetzerzeugung [Beam Mesher]
Erweiterte Flächennetzerzeugung [Advanced Surface Mesher]
Octree-Dreiecksvernetzung [Octree Triangle Mesher]
Tetraederfüllung [Tetrahedron Filler]
Octree Tetraedervernetzung [Octree Tetrahedron Mesher]
3D-Translation [Sweep 3D]

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 140 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
16.1.2 Vernetzen und Netzmodifikation
Symbolleiste Globale Spezifikationen [Global Specifications] bzw. Globale Vernetzungspa-
rameter [Global Meshing Parameters] .
Symbolleiste Lokale Spezifikationen [Local Specifications ] vor dem Vernetzen aktiv.
Vereinfachung von Grenzen [Boundary Simplifications]
Bedingungen hinzufügen/entfernen [Add/Remove Constraints]
Erzwungene Elemente [Imposed Elements]
Spezifikation von Domänen [Domain Specifications]
Bild 169: Vereinfachung von Grenzen bzw. Bohrungen bereinigen
Symbolleiste Bearbeitungstools [Edition Tools] bei Erweiterte Flächennetzerzeugung [Ad-
vanced Surface Mesher] nach dem Vernetzen aktiv.
Bohrungen bereinigen [Removing Holes]
Vereinfachung bearbeiten [Edit Simplification]
Erzwungene Elemente [Imposed Elements]
Domäne neu vernetzen [Remesh Domain]
Vernetzung bearbeiten [Mesh Editing]
Bearbeitung von Netzbereichen (Domänen)
Domäne neu vernetzen [Re-meshing a Domain]
Netz nach Domänen entfernen [Removing the Mesh by Domain]
Domäne sperren [Locking a Domain]
Netz manuell ändern
Vernetzung bearbeiten [Edit Mesh]
Vierecke aufteilen [Split Quadrangles]

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 141 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Symbolleiste Ausführung [Execution Toolbar]
Geometrievereinfachung [Geometry Simplification]
Teil vernetzen [Mesh the Part]
Geometrievereinfachung
Geometrievereinfachung [Geometry Simplification]
Vereinfachung entfernen [Remove Simplification]
Vernetzung
Teil vernetzen [Mesh the Part]
Netz entfernen [Remove Mesh]
16.1.3 Netztransformationen und –operationen
Symbolleiste Netztransformationen [Mesh Transformations]
Translationsnetzerzeugung [Mesh Transformations]
Extrusionsnetzerzeugung [Extrude Transformations]
Beschichtungstransformationen [Coating Transformations]
Transformationsnetze
Translationsnetzerzeugung [Translation Mesher]
Rotationsnetzerzeugung [Rotation Mesher]
Symmetrienetzerzeugung [Symmetry Mesher]
3D-Extrusionsnetze
Extrusionsnetzerzeugung mit Translation [Extrusion by Translation]
Extrusionsnetzerzeugung mit Rotation [Extrusion by Rotation]
Extrusionsnetzerzeugung mit Symmetrie [Extrusion by Symmetry]
Extrusionsnetzerzeugung entlang Leitkurve [Extrusion along Spine]
Beschichtungsnetze
Eindimensionales Netz für Beschichtung [Coating 1D Mesh]
Zweidimensionales Netz für Beschichtung [Coating 2D Mesh]

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 142 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Symbolleiste Netzoperatoren [Mesh Operators]
Netzoffset [Offsetting the Mesh]
Quader aufteilen [Splitting Quads]
Netzknoten verschieben [Move Mesh Nodes]
16.1.4 Export und Import von Netzen
Symbolleiste Importieren/Exportieren [Import/Export]
Netz importieren [Import Mesh]
Netz exportieren [Export Mesh]
16.1.5 Analysewerkzeuge für Netze
Symbolleiste Tools für die Netzdarstellung [Mesh Visualization Tools] im Netzeditor
Netzdarstellung [Visu Mode]
Schnittebene [Cutting Plane]
Netzausrichtung [Elements Orientation]
Standarddarstellung [Standard Visualization]
Qualitätsdarstellung [Qualtity Visualization]
Ausrichtungsdarstellung [Orientation Visualization]
Symbolleiste Tools für die Netzdarstellung [Mesh Visualization Tools] außerhalb des Netze-
ditors
Netzdarstellung [Visu Mode]
Darstellung durch Vernetzungsteile [Visualization by Mesh Parts]
Schnittebene [Cutting Plane]
Elementausrichtung [Elements Orientation]
Elemente verkleinern [Shrink Elements]
Standarddarstellung [Standard Visualization]
Qualitätsdarstellung [Qualtity Visualization]
Ausrichtungsdarstellung [Orientation Visualization]

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 143 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Darstellung durch Vernetzungsteile [Visualization by Mesh Parts]
Darstellung durch Gruppen [Visualization by Groups]
Symbolleiste Tools für die Netzanalyse [Mesh Analysis Tools] im Netzeditor
Freie Kanten [Free Edges]
Schnittpunkte/Kollisionen [Intersections/Interferences]
Doppelte Elemente [Duplicate Elements]
Doppelte Knoten [Duplicate Nodes]
Qualitätsanalyse [Quality Analysis]
Symbolleiste Tools für die Netzanalyse [Mesh Analysis Tools] außerhalb des Netzeditors
Freie Kanten [Free Edges]
Schnittpunkte/Kollisionen [Intersections/Interferences]
Doppelte Elemente [Duplicate Elements]
Doppelte Knoten [Duplicate Nodes]
Qualitätsanalyse [Quality Analysis]
Verbindungsübersicht [Connection Summary]
Symbolleiste Netzflächentools [Mesh Analysis Tools] im Netzeditor
Nicht vernetzte Domänen [Unmeshed domains]
Vernetzungsteilstatistik [Mesh Part Statistics]

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 144 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
16.1.6 Analyseverbindungen
Symbolleiste Analyse von Stützelementen [Analysis Supports]
Analyse allgemeiner Verbindungen [General Analysis Connection]
Analyse von Punktverbindungen [Point Analysis Connection]
Analyse von Linienverbindungen [Line Analysis Connection]
Analyse von Flächenverbindungen [Surface Analysis Connection]
Analyse von Punkt-zu-Punkt-Verbindungen [Qualtity Visualization]
Analyse von Punktverbindungen [Point Analysis Connection]
Analyse von Punktverbindungen in einem Teil [Point Analysis Connection within one Part]
Analyse von Linienverbindungen [Line Analysis Connection]
Analyse von Linienverbindungen in einem Teil [Line Analysis Connection within one Part]
Analyse von Flächenverbindungen [Surface Analysis Connection]
Analyse von Flächenverbindungen in einem Teil [Surface Analysis Connection within one Part]
Analyse von Punkt-zu-Punkt-Verbindunge [Points to Points Analysis Connection]
Analyse von Punktschnittstellen [Point Analysis Interface]
16.1.7 Schweißverbindungen
Symbolleiste Methoden für die Vernetzung von Schweißverbindungen [Welding Meshing Me-
thods]
Punktschweißverbindungsnetz [Spot Welding Connection Mesh]
Nahtschweißverbindungsnetz [Seam Welding Connection Mesh]
Flächenschweißverbindungsnetz [Surface Welding Connection Mesh]
Knoten-zu-Knoten-Verbindungsnetz [Nodes to Nodes Connection Mesh]
Knotenschnittstellennetz [Node Interface Mesh]

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 145 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
16.2 Prinzipielles Vorgehen
1. Bauteil bzw. Baugruppe vorbereiten
Mit AMT zu vernetzende Flächen möglichst gleich in der Umgebung GSD auf Fehler unter-
suchen und Fehler bereinigen. Für die Verformung- und Spannungsberechnung nicht rele-
vante Formelemente ggf. inaktivieren.
Den Flächen gleich Material zuweisen.
Falls sich im Modell Festkörper befinden, von denen z. B. Flächen abgeleitet worden sind,
dürfen sich diese Festkörper nicht im Hauptkörper befinden.
Beispielmodell: Flae1_Bohrg_Riss_Trapez_Parall_Punkte_R14.CATPart
2. Advanced Meshing Tools starten , Statikanalyse.
3. Vernetzungsart wählen, z. B. Erweiterte Flächennetzerzeugung [Advanced Surface Mes-
her] (R14 ).
4. Globale Parameter definieren.
Bild 170: Definition der globalen Netzparameter
Fläche selektieren vor o. nach Selektion des Symbols für den Netztyp.
Netzgröße einstellen.
Gerichtetes Netz bedeutet eine (weitgehende) Ausrichtung der Netzlinien nach einer Vor-
zugsrichtung des jeweiligen Flächenbereichs (Domäne).
Streifenoptimierung bewirkt eine Vernetzung, die schmale Streifen besser im Netz abbildet.
Automatische Netzerfassung dient dazu, freie, interne sowie externe Kanten als Randbedin-
gungen automatisch zu erfassen. So sind auch die Netzknoten auf der Randkurve mit den
Knoten angrenzender Netze in Übereinstimmung zu bringen. Beim Erzeugen von mehreren
aneinander angrenzenden Netzen unbedingt diese Option nutzen!
Im Register Geometrie den Durchhang (SAG-Wert) nicht zu groß wählen, sonst werden Ver-
rundungen zu grob vernetzt. Automatische Kurvenerfassung wählen, wenn Lücken zu An-
schlussnetzen geschlossen werden sollen, nicht bei kleinen Netzüberdeckungen.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 146 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Nach OK Bewegliches Oberflächennetz im Baumzweig Knoten und Elemente und
Netzeditor geöffnet.
Im Netzeditor die Punkte 5 bis 12 bearbeiten.
5. Geometrie bereinigen , d. h. kleine Formelemente beseitigen, die keinen maßgeblichen
Einfluss auf die Verformungen und Spannungen haben. Beispiele sind kleine Lö-
cher/Bohrungen und Flächen, wie enge Kragen, kleine Einschnitte und nasenförmige Ab-
biegungen. Auch Risse/Dreieckkerben sind zu beseitigen. (Dreieckkerben lassen sich manchmal auch mittels Geometrievereinfachung entfernen.)
6. Bedingungen für Kurven und Eckpunkte hinzufügen/entfernen , z. B. Kurve selektieren,
auf der Netzknoten liegen sollen. Dabei können auch zusätzliche, im GSD auf der Fläche
erzeugte Kurven als Domänengrenzen eingefügt werden.
Bei R14 müssen zusätzlich noch die (im GSD erzeugten) je 18 Punkte auf den Kurven als
Bedingungen hinzugefügt werden. Bei späteren Releases, z. B. R19, genügen die Kurven
als Bedingungen, weil sich auch auf Kurven die Punkte als erzwungene Elemente erzeugen
lassen.
Bild 171: Flächengrenzen als interne Kanten (oben) und Kurven zur Domänenunterteilung (un-ten) als Bedingungen hinzufügen

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 147 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
7. Anzahl der Knoten pro Element , bei R14 einheitlich 18 Elemente entsprechend der An-
zahl Punkte auf den Kurven.
Bild 172: Gleiche Knotenzahlen auf Kanten und Kurven für gleichmäßige Vernetzung (R19)
Das Flächennetz enthält nur vier Dreiecke, wie die Vernetzungsteilstatistik zeigt. Diese
Dreiecke resultieren aus der Korrektur der Dreieck- und der Trapezkerbe. Sie lassen sich
aber auch noch entfernen (Bild 174).
8. Geometrievereinfachung .
9. Teil vernetzen [Mesh the Part] Netz erzeugt.
10. Neuvernetzung von Flächenbereichen (Domänen) .
Unten auf Bild 172 wurden für alle Domänen bis auf den
unteren Streifen die Vernetzungsmethode Zugeordnete
Quadrate [Mapped Quads] mit Beeinflussung der Nach-
barbereiche gewählt und dann diese (blauen) Domänen gesperrt .
Bild 173: Netzbereiche modifizieren
11. Netz manuell editieren durch Knotenverschiebung (Bild 175) oder die Operationen,
welche beim Überfahren des Netzes mit dem Cursor als jeweils mögliche Operationen ein-
geblendet werden (Bild 176). Je nach Netzeigenschaft sind dabei verschiedene Varianten

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 148 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
zum Modifizieren des Netzes zu wählen, meist zumindest die Option Um Änderungen
glätten [Smooth around modifications].
Bild 174: Entfernen der letzten Dreiecke auf Bild 172 durch Neuvernetzung des unteren Streifens und Knotenverschiebung
Bild 177: Auswahl der Operation Kante entfernen
Bild 175: Knoten verschieben Bild 176: Eingeblendete Operationen

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 149 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Ohne die Option Um Änderungen glätten entsteht im speziellen Fall von Bild 177 ein rot
gekennzeichneter Netzbereich mit schlechter Qualität.
Bild 178: Netz modifizieren durch Operation Kantenaustausch
12. Falls keine weiteren Netzmodifikationen vorzunehmen sind, mit EXIT den Netzeditor
verlassen. Ggf. RMT auf Bewegliche Oberflächennetze im Baum > Aktualisieren.
13. Qualitätsanalyse .
Bild 179: Anzeige ungenügender Netzelemente
14. Überprüfung auf Lücken und Über-
deckungen .
Bild 180: Interference Check

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 150 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
15. Anschlussflächen vernetzen oder Anschlussflächen als Extrusionsnetze erzeugen
Extrusionsnetze können von eindimensionalen Netzen oder von zweidimensionalen Netzen
als Elterngeometrie erzeugt werden. Die „Achse“ entspricht etwa einer Leitkurve. Sie muss
nicht (mehr) direkt am Netz beginnen, aber das Extrusionsnetz wird nicht länger als die
„Achse“ erzeugt.
Beispiel-Startmodell Ana1A_Extrnetze0_R14.CATAnalysis.
1D-Netze von der hellblauen Linie Ableiten_Kante_fuer_1D-Netz und der violetten Kurve Begrenzung_fuer_1D-Netz erzeugen [Beam Mesher] .
Bild 181: 1D-Netze erzeugen
Im Baum RMT auf Knoten und Elemente > Alle Netze aktualisieren.
Extrusionsnetzerzeugung entlang Leitkurve [Extrude Mesher along Spine] .
Bild 182: Extrusionsnetz ent-lang einer Leitkurve
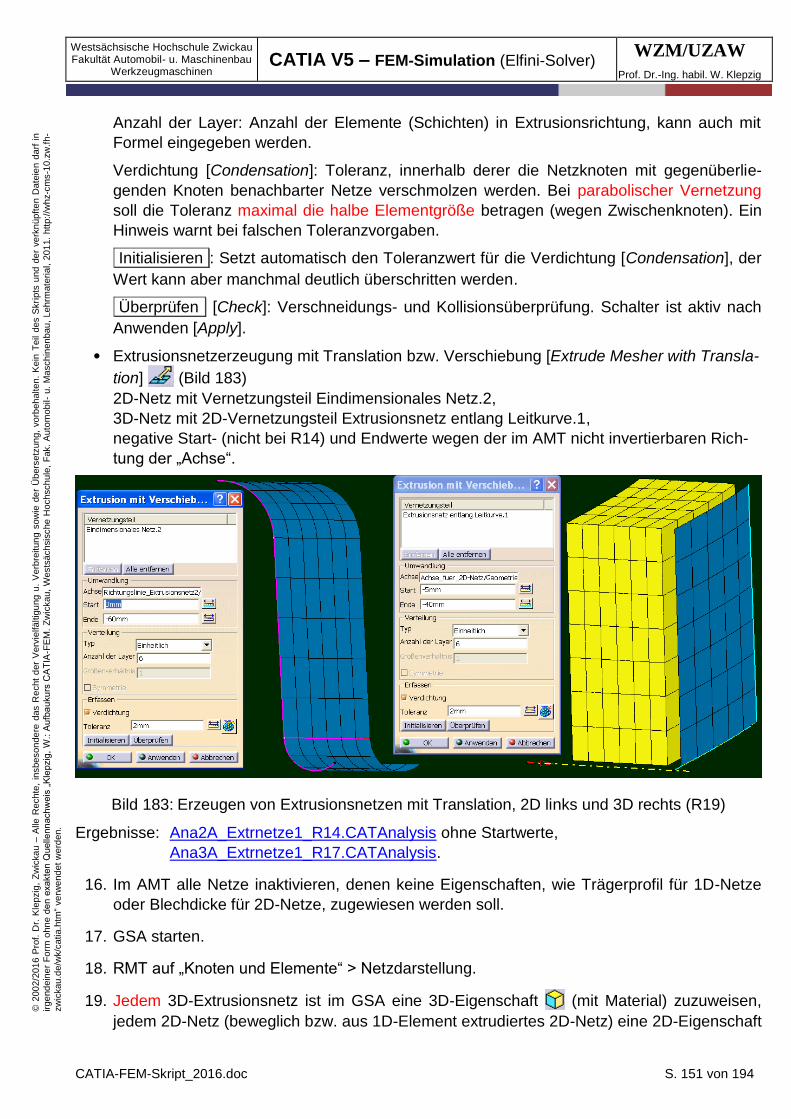
Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 151 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Anzahl der Layer: Anzahl der Elemente (Schichten) in Extrusionsrichtung, kann auch mit
Formel eingegeben werden.
Verdichtung [Condensation]: Toleranz, innerhalb derer die Netzknoten mit gegenüberlie-
genden Knoten benachbarter Netze verschmolzen werden. Bei parabolischer Vernetzung
soll die Toleranz maximal die halbe Elementgröße betragen (wegen Zwischenknoten). Ein
Hinweis warnt bei falschen Toleranzvorgaben.
Initialisieren : Setzt automatisch den Toleranzwert für die Verdichtung [Condensation], der
Wert kann aber manchmal deutlich überschritten werden.
Überprüfen [Check]: Verschneidungs- und Kollisionsüberprüfung. Schalter ist aktiv nach
Anwenden [Apply].
Extrusionsnetzerzeugung mit Translation bzw. Verschiebung [Extrude Mesher with Transla-
tion] (Bild 183)
2D-Netz mit Vernetzungsteil Eindimensionales Netz.2,
3D-Netz mit 2D-Vernetzungsteil Extrusionsnetz entlang Leitkurve.1,
negative Start- (nicht bei R14) und Endwerte wegen der im AMT nicht invertierbaren Rich-
tung der „Achse“.
Bild 183: Erzeugen von Extrusionsnetzen mit Translation, 2D links und 3D rechts (R19)
Ergebnisse: Ana2A_Extrnetze1_R14.CATAnalysis ohne Startwerte,
Ana3A_Extrnetze1_R17.CATAnalysis.
16. Im AMT alle Netze inaktivieren, denen keine Eigenschaften, wie Trägerprofil für 1D-Netze
oder Blechdicke für 2D-Netze, zugewiesen werden soll.
17. GSA starten.
18. RMT auf „Knoten und Elemente“ > Netzdarstellung.
19. Jedem 3D-Extrusionsnetz ist im GSA eine 3D-Eigenschaft (mit Material) zuzuweisen,
jedem 2D-Netz (beweglich bzw. aus 1D-Element extrudiertes 2D-Netz) eine 2D-Eigenschaft

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 152 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
, jedem 1D-Netz eine 1D-Eigenschaft . Im Beispielmodell wurden gleich dem gesam-
ten Bauteil oder den Flächen Material zugewiesen.
20. Einspann-, Last- und Kopplungsbedingungen definieren, u. U. mittels Linien- bzw. Flächen-
gruppen.
Auf AMT-Netze können unmittelbar allerdings weder Randbedingungen noch Lasten aufge-
bracht werden. Dazu sind als Stützelemente GSD-Elternkurven, Randkurven der GSD-
Elternflächen für die AMT-Netze bzw. die Elternflächen selbst zu wählen (sichtbar schalten
oder im verdeckten Bereich selektieren).
Extrusionsnetze eignen sich deshalb nur bedingt für das Aufbringen von Randbedingungen
oder Lasten.
Im Beispielmodell wurden zusätzlich Flächen für Lasten im GSD erzeugt und dann im AMT
mit erweiterter Flächennetzerzeugung vernetzt.
21. Berechnung starten.
Anmerkung: Wegen der umständlichen Modellierung nutzt der Autor AMT kaum. Damit fehlen
ihm auch die hinreichenden Erfahrungen, die eigentlich für AMT-Vernetzungen er-
forderlich sind. Es können deshalb nur einige Hinweise an Beispielen gegeben
werden. Leider sind weder der CATIA-Hilfe noch sonstigen Veröffentlichungen zu
CATIA die erforderlichen Informationen zu entnehmen.
Ergebnismodell:
Ana4A_Extrnetze2_Lastflaechen_R14.CATAnalysis.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 153 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
16.3 Beispiele
16.3.1 2D-Netze für Blechformteil mit Löchern und Riss, Anschlussflächen mit Lücke und Überdeckung
Startmodell Basisflaechen_Bohrg_Riss_Trapez_Luecke_Ueberdeckg_R14.CATPart.
Vernetzen mit den Einstellungen: Erweiterte Flächennetzerzeugung (R14 ).
Bild 184: Globale Parameter bei der erweiterten Flächennetzerzeugung
Für alle drei zu erzeugenden Netze einheitlich folgende globale Parameter einstellen:
Netztype: frontale Quadrate, Elementtyp: parabolisch, Netzgröße: 12 mm.
Unterschiedlich zu wählende Parameter für die drei zu erzeugenden Netze:
Fläche mit Fläche mit
Translationsfläche Überdeckung Lücke
Netzparameter (gelb-hellbraun) (rosa) (blau)
Dreiecke minimieren x x x
Gerichtetes Netz x - -
Streifenoptimierung x - -
Automatische Netzerfassung x x x
Toleranz 1 mm 2 mm 2,5 mm
Geometrieparameter
Durchhang f. Bedingungen 0,6 mm 0,6 mm 0,6 mm
Winkel zwischen Teilflächen 10° 10° 10°
Winkel zwischen Kurven 10° 10° 10°
Mindestgröße der Bohrung 2 mm 2 mm 2 mm
Bei Vereinfachung zusammenfassen x - -
Mindestgröße 2 mm - -
Automatische Kurvenerfassung x x (vorerst) x
Toleranz 1,5 mm 1,5 mm 2,5 mm Gelb-hellbraune Translationsfläche zuerst vernetzen, damit ist für diese eigentlich die auto-
matische Netzerfassung überflüssig.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 154 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Netztyp : Vordere Vierecke [Front Quads].
Vereinfachung von Grenzen
Riss am inneren Eckpunkt (Scheitelpunkt) selektieren. Ein Riss muss dreieckförmig vom
Rand nach innen verlaufen, darf also nur drei Eckpunkte haben. Der trapezförmige Aus-
schnitt kann deshalb durch Vereinfachung von Grenzen nicht geschlossen werden.
Für zwei Löcher > minimale Lochgröße deren Randkurve selektieren. (Das kleine Loch mit
einer Größe von 1 x 2 mm² wird durch die gesetzte Mindestgröße der Bohrung von 2 mm
geschlossen.)
Bild 185: Riss beseitigen
Bild 186: Bohrungen schließen
Teil Vernetzen [Mesh the Part] Netz erzeugt.
Editieren der gelben Teilflächen (Bereiche/Domänen) > Vernetzungsmethode: Zuge-
ordnete Quadrate [Mapped Quads] mit Beeinflussung der Nachbarbereiche, beginnen mit
Randfläche bei xmax > Anwenden > nächste Fläche usw. Dann diese Domänen sperren
(bei R14 ggf. nach jedem Editierungsschritt sperren). Letzte Fläche mit Trapezkerbe ist
nur mit Vernetzungsmethode Vordere Quadrate [Front Quads] oder Zugeordnete freie
Quadrate [Mapped Free Quads] sinnvoll zu vernetzen (Bild 187).

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 155 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 187: Blaue Netzbereiche sind gesperrt, grün der Bereich mit trapezförmiger Kerbe
Trapezförmige Kerbe beseitigen.
Mit Geometrievereinfachung die vier Eckpunkte
entfernen.
Bild 188: Entfernen der vier Eckpunkte
Dann mit in mehreren Schritten Netzelemente zerteilen und Netzknoten so verschieben, dass die Lücke der trapezförmigen Kerbe geschlossen wird. Eine bessere Netzqualität kann allerdings einfacher erreicht werden, wenn die trapezförmige Kerbe im Part beseitigt wird.
Bild 189: Fünf Schritte zum Schließen der der trapezförmigen Kerbe und zur anschließenden Netzbearbeitung

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 156 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Hellbraune Netzelemente der mit den Vernetzungsmethoden Vor-
dere Quadrate oder Zugeordnete freie Quadrate modifizierten Do-
mäne manuell editieren durch Knotenverschiebung und/oder
Trennen. Ggf. auch bei grünen Netzelementen durch Knotenver-
schiebung eine gleichmäßigere Vernetzung anstreben.
Verschiedene Varianten probieren „ Um Änderungen glätten“ und
„ Um Änderungen vereinigen“ bis hin zur Auswahl aller Modifika-
tionen.
Eine weitere Verbesserung der Netzqualität kann ggf. durch zusätzlich auf der Randkurve
mit dem korrigierten Riss festgelegte Punkte erreicht werden oder das Vorgehen gem.
Bild 172 und Bild 174.
GSD-Extrusionsfläche mit Überdeckung (R14 ).
, Toleranz 2 mm für Nachbarnetzfang, andere Netzparameter gem. Seite 153.
Teil Vernetzen [Mesh the Part] Netzfehler für den schmalen Überdeckungsbereich,
zunächst mit OK abschließen.
Netzeditor verlassen .
Teilegeometrie verdecken Netz schließt ohne Überdeckung an. Fehlermeldung bezieht
sich darauf, dass Anschlussnetz um den Überdeckungsbereich gegenüber der Ausgangs-
fläche kürzer ist.
Doppelklick auf Bewegliches Oberflächennetz.2 Im Fenster Globale Parameter, Geomet-
rie: Automatische Kurvenerfassung nicht aktivieren keine Meldung eines Vernetzungs-
fehlers mehr.
GSD-Extrusionsfläche mit Lücke (R14 ).
Vorgehen ähnlich wie bei Extrusionsfläche mit Überdeckung, aber nur mit Automatische
Kurvenerfassung wird Lücke überbrückt. Netzparameter gem. Seite 153.
Ergebnisse
Ergebnis bei nur wenig nachgearbeiteter Fläche nach dem Entfernen der Trapezkerbe:
Ana5A_Korr_Bohrg_Riss_Trapez_Luecke_Ueberdeckg_R14.CATAnalysis
Ergebnis mit kleineren Netzen in den Verrundungsradien, erzwungenen Kurven und Punkten
sowie editierter Fläche zum Entfernen der Trapezkerbe ohne Dreiecke: Ana6A_Korr_-
zusConstr_Bohrg_Riss_Trapez_Parall_Luecke_Ueberdeckg_R14_0Dreiecke.CATAnalysis.
Eine bessere Netzqualität kann allerdings schneller erreicht werden, wenn die trapezförmige
Kerbe im Part beseitigt wird.
Startmodell ohne trapezförmige Kerbe:
Basisflaechen_Bohrg_1Riss_Luecke_Ueberdeckg_R14.CATPart,

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 157 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Ergebnis ohne erzwungene Elemente [Constraints]: Ana7A_Korr_Bohrg_1Riss_Luecke_-
Ueberdeckg_R14.CATAnalysis.
Werden zusätzlich auf der Randkurve mit dem korrigierten Riss Punkte festgelegt, durch die das
Netz gezwungen wird, lässt sich die Netzqualität ggf. noch positiv beeinflussen.
Bild 190: Erzwungene Elemente auf der Randkurve mit korrigiertem Riss
Ergebnis mit erzwungenen Elementen auf der Randkurve mit korrigiertem Riss:
Ana8A_Korr_Constr_Bohrg_1Riss_Luecke_Ueberdeckg_R14.CATAnalysis.
16.3.2 Blechformteil mit 3D-Netzen durch Translation modellieren
Zum Aufzeigen von Möglichkeiten und Grenzen der 3D-Vernetzung, insbesondere mit 3D-
Translation [Sweep 3D] und deren Verbindung, wird die Blechgrundform wie im Beispiel des Ab-
schnitts 16.3.1 verwendet. Diese dünnwandige Form wird deshalb gewählt, weil den GSA-
Tetraederelementen dann eine starke Verzerrung und fehlerhafte Berechnungsergebnisse nach-
gesagt werden. In den nachfolgenden Abschnitten sollen dann die Spannungen und Verformun-
gen der verschiedenen Modellierungsarten miteinander verglichen werden.
3D-Translationsnetze [Sweep 3D] benötigen als Elterngeometrie
ein Volumen, von dem die Führungskurven abgeleitet werden,
je eine vom Volumen mit dem GSD-Befehl Ableiten abgeleitete Fläche(nverbindung) als
Translationsgrenze („unten“ [Bottom]) für den Beginn und das Ende („oben“ [Top]) des 3D-
Netzes.
Startmodell: Startmodell_3DTranslation_Bsp1_R17.CATPart.
Schrittfolge:
1. Start Advanced Meshing Tools , Statikanalyse.
2. 2D-Netze der Translationsgrenzen erzeugen.
Fläche Beginn_Trans1 selektieren und dann Erweiterte Flächennetzerzeugung [Advanced
Surface Mesher] (Bild 191).
Globale Parameter gem. Bild 191 festlegen.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 158 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 191: Globale Parameter für das 2D-Netz festlegen
Mit OK öffnet sich der Netzeditor.
Die 6 internen Verrundungsgrenzen mit Bedingungen hinzufügen (Bild 192, Nr. 1) als Kanten
für die Grenzen der Vernetzungsbereiche festlegen (alternativ nur Scheitelpunkte gem. Bild
195).
Teil vernetzen (Bild 192, Nr. 2).
Die 3 Domänen der Verrundungsbereiche enger mit 6 mm-Quadraten vernetzen, dazu Be-
reich anklicken und mit Anwenden Schritt für Schritt die Vernetzungsmethode und die
Netzgröße zuweisen (Bild 192, Nr. 3).
Netzeditor verlassen (Bild 192, Nr. 4).
Bild 192: Schritte zur 2D-Netzmodifikation im Netzeditor
3. Nachdem die 2D-Netze der Translationsgrenzen vorhanden sind, kann die 3D-Translation
erzeugt werden (Bild 193).

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 159 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 193: Schritte zum Erzeugen des 3D-Translationsnetzes
Erst das Volumen selektieren (Bild 193, Nr. 1), dann erst das Symbol (Bild 193, Nr. 2).
Die Elternflächen der 2D-Begrenzungsnetze im Register Geometrie als Translationsgrenzen
Unten und Oben im Baum selektieren, im Register Netz den Elementtyp Parabolisch, die
Anzahl Layer und die Erfassungstoleranz festlegen (Bild 193, Nr. 3). Mit Prüfen testen, ob
die gewählte Toleranz möglich ist.
Im Register Geometrie durch Berechnen die Führungselemente automatisch berechnen
lassen (Bild 193, Nr. 4) oder über die darunter angeordneten Schalter die Führungselemente
manuell festlegen. Achtung! Die 2D-Netze „unten“ und „oben“ müssen unbedingt an jedem
Führungselement einen Netzknoten haben.
Mit Anwenden das Netz berechnen lassen (Bild 193, Nr. 5).
Bild 194: Fehlermeldung bei fehlenden Netzknoten an den Führungselementen

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 160 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 195: Scheitelpunkte als Bedin-gungen für die 2D-Netze an Start- und Endpunkten der 3D-Führungselemente hin-zufügen
16.3.3 Verbinden von 3D-Netzen
Leider lassen sich keine weiteren 3D-Translationsnetze anschließen, weil keine gemeinsamen
Netzknoten zulässig sind. Selbst wenn die 2D-Begrenzungsnetze und das erste 3D-
Translationsnetz inaktiviert sind, werden beim Versuch, ein weiteres 3D-Netz anzuschließen, die
Knoten der inaktiven Netze gefangen. Es kommt eine Fehlermeldung (Bild 196). 3D-
Translations-Anschlussnetze können nur mit einer Lücke erzeugt werden, die größer sein muss
als die Erfassungs-/Verdichtungstoleranz. Das Schließen dieser Lücke bereitet teilweise erhebli-
che Schwierigkeiten. Mangels ausreichender AMT-Erfahrungen waren viele Versuche zum
Schließen der Lücken mit unterschiedlichsten Varianten erforderlich. Beim Berechnungsversuch
in der Umgebung GSA zeigte sich immer wieder, dass die Knoten nicht hinreichend gefangen
wurden (Bild 197, Bild 198).
Bild 196: Fehlermeldung beim Prüfen des Anschlussnetzes

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 161 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 197: Lückennetz ohne Verbindung zu den benachbarten 3D-Translationsnetzen
16.3.3.1 3D-Extrusionsnetze zum Lückenschluss zwischen benachbarten 3D-
Translationsflächen
Ana9B_3DTranslation3DExtr_R19_Kopplnetz.CATAnalysis
Extrusionsnetz Bild 198 entlang Leitkurve (gelb) und Extrusionsnetz mit Verschiebung (rosa) mit
Toleranzen 0,5 mm fangen die Netzknoten des benachbarten 3D-Translationsnetzes.1 im unte-
ren Bereich nicht.
Bild 198: Kein oder nur teilweiser Fang der Netzknoten bei unpassender Verdichtungstoleranz
Korrektur der Netzfangtoleranzen: Initialisieren
Toleranz des gelben Extrusionsnetzes entlang Leitkurve
0,745 mm Anwenden Fehlermeldung rechts. Die Tole-
ranz wurde iterativ bis zum möglichen Größtwert 0,696 mm
angepasst.
Toleranz des rosafarbenen Extrusionsnetzes mit Verschie-
bung 0,745 mm Anwenden OK

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 162 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Schlussfolgerung: Allgemeingültige Regeln für AMT-Vernetzungen sind kaum formulierbar.
Ergebnismodell:
Ana9C_1x3DTranslation3DExtr_mitLeitk0,696_R19_Kopplnetz.CATAnalysis
16.3.3.2 2D-Kopplungsnetze zum Lückenschluss zwischen benachbarten 3D-
Translationsflächen
Es kann auch versucht werden, die Netzknoten benachbarter 3D-Translationsnetze durch eine
2D-Kopplungsfläche zu fangen, was im speziellen Fall nicht erforderlich wäre. Im Beispiel A-
na9D_2x3D-Trans-Offset1mmzu0,01Koppfl_1xExtr-Lastfl.CATAnalysis
zunächst die Eltern-2D-Netze „oben“ bzw. „unten“ für die 3D-Translationsnetze mit der Netz-
fangtoleranz 0,2 mm bei einem Elternvolumen-Abstand von 1 mm erzeugen, dann
3D-Translationsnetze,
zusätzliche 2D-„Kopplungsnetze“, im Beispiel mit 5 mm Netzfangtoleranz,
schrittweise den Volumina-Abstand (Offset.1 S-Form "unten" wegen Fehlermeldung bei 3D-
Transl) von 1 mm auf 0,01 mm verringert.
Das Vorgehen klappte allerdings nur bei der S-förmigen 3D-Translationsfläche, nicht bei der
ebenen. Die ebene Anschlussfläche wurde als Extrusionsnetz mit Verschiebung modelliert (Bild
199).
Nachteilig ist, dass von Mises-Spannungen an mittels 2D-Netzen gekoppelten Netzknoten nicht
als farbige Spannungsflächen angezeigt werden (Bild 199).
Bild 199: Von 2D-Kopplungsnetzen gefangene Netzknoten werden nicht als farbige Spannungen, Typ „Durchschnittliches ISO“ angezeigt.
16.3.3.3 Vergleich der berechneten Verschiebungen und Spannungen des Blechformteils
aus drei Volumina mit der GSA-TE10-Vernetzung
Wesentlich einfacher ist die GSA-TE10-Modellierung (Ana9E_zVgl_TE10-Modell.CATAnalysis),
die mit den AMT-Modellierungen verglichen werden soll.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 163 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Die Verschiebungen (Bild 200) zeigen:
Größte Nachgiebigkeit beim Modell 9C oben links aus 3 3D-Translationsnetzen und deren
Netzkopplungen mit einem Extrusionsnetz entlang einer Leitkurve (ebener Ansatz), Toleranz
0,696 mm, sowie einem Extrusionsnetz mit Verschiebung (S-Form), Toleranz 0,745 mm.
Kleinste Nachgiebigkeit beim Modell 9D unten links aus 2 3D-Translationsnetzen und deren
Netzkopplung mittels 2D-Netz (S-Form) und einem 3D-Extrusionsnetz mit Verschiebung
(ebener Ansatz).
Die Verformungen der mit geringstem Aufwand modellierten Variante 9E als GSA-
Tedraedernetz rechts liegen dazwischen. Bezüglich der Verformung kann also von fehlerhaf-
ten Ergebnissen bei Tedraedervernetzung nicht die Rede sein.
Die von Mises-Spannungen (Bild 201) an Kerbstellen können in der Regel nicht als reale
Kerbspannungen bewertet werden. Wird das berücksichtigt, zeigen die Modelle 9C bis 9E quali-
tativ kaum Unterschiede. Beim Modell 9D mit der 2D-Kopplungsfläche am S-förmigen Ansatz
fehlt in der Darstellung der Bereich mit gefangenen Netzknoten. Auch hinsichtlich der berechne-
ten Spannungen treten bei GSA-Tedraeder-Vernetzungen keine Fehler auf.
Weitere Vernetzungsvergleiche im Abschnitt 16.3.5.
Bild 200: Vergleich der Verschiebungen

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 164 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 201: Vergleich der von Mises-Spannungen
16.3.4 Gesamtvernetzung von Blechteilen als 3D-Translationen
Bei Hexaedervernetzung von Blechformteilen werden normalerweise die HE-20-
Translationsnetze aus Innenfläche und Außenfläche erstellt und die 3D-Translationsfläche da-
zwischen als „Blechdicke“. Das Modell AnalysisBFT f. AMT-Blechdicken-3D-Transl_LagLastExtr-
Leitk.CATAnalysis enthält
3D-Translationsnetz zwischen Blechaußen- und Blechinnenseite, 3 Layer,
drei 3D-Extrusionen entlang Leitkurve, für die Lagerungs- und die zwei Lasteinleitungsflä-
chen.
Die Translationsverschiebungen gem. Bild 202 oben entsprechen den Verschiebungen auf Bild
200 oben links, die von Mises-Spannungen auf Bild 202 unten sind bis auf den schmalen Bereich
der Lagerungs-3D-Extrusion mit Leitkurve ähnlich wie auf Bild 201 oben links.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 165 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 202: Netzverformung und Spannun-gen
16.3.5 Vergleich der Verformungen und Spannungen bei verschiedenen Modellierungsvarianten eines Rohr-Testmodells und des R17-Blechformteils
Zunächst soll an einem einfachen Rohr-Testmodell versucht werden herauszufinden, wie in
CATIA die 2D-Eigenschaften verarbeitet werden. Weder die CATIA-Hilfe noch die im Quellen-
verzeichnis aufgeführten Bücher geben dazu hinreichende Antworten. Klar ist nur, dass die 2D-
Eigenschaft Dicke je zur Hälfte auf beiden Seiten des Flächennetzes aufgebracht wird.
Weil durch eine feste Einspannung die Querverformung behindert wird, errechnen sich an der
Einspannung zu große Spannungsspitzen. Deshalb werden nicht die Spannungen an der Ein-
spannung verglichen.
Konservative Berechnung:
Spannung bei reiner Biegung mit
minI minimales Flächenmoment 2. Grades,
y Abstand von der neutralen Faser,
)dD(
y64Fy
M)y(
44xx
bxb
.
Für ein Rohr mit Außendurchmesser D = 45 mm und einem Innendurchmesser d =35 mm er-
rechnen sich bei 200 mm Abstand vom Kraftangriff infolge der Kraft von 5000 N

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 166 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
maximale Spannung am Außenmantel mit y = D/2
MPa176)3545(
45322005000
)dD(
D32F4444maxb
und maximale Spannung am Bohrungsmantel mit y = d/2
MPa137)3545(
35322005000
)dD(
d32F4444Innenrandmaxb
.
Maximale Verformung ohne Schubanteil mit dem Abstand von der Einspannung lE =250 mm
mm020,1
)3545(2000003
642505000
dD64
E3
F
E3
Fv
44
3
44
3E
3E
max
.
Rohr-Startmodell mit bereits erzeugten AMT-Netzen und GSA-OCTREE-Netzen
Ana10A_Rohr-Modellvergleich_Netze_R17.CATAnalysis mit den 6 Netzen
1_Translation des 3D-Netzes_mehrschichtig, bestehend aus inneren, mittleren und äußeren
radialen Netzbereichen,
2_Translation des 3D-Netzes, mit nur einem radialen Netzbereich,
3_OCTREE-Tetraedernetz_TE10 für das Solid,
4_OCTREE-2D-Dreiecksnetz_TR6,
5_Erweitertes Flächennetz_2DQuad,
6_Erweitertes Flächennetz_2DQuad_Umkehren.
Für alle Varianten wurde die (globale) Netzgröße 5 mm gewählt (über Parameter zugewiesen).
Folgende Fragestellungen sollen untersucht werden:
Hat bei 3D-Translationsnetzen die Anzahl der Schichten in radialer Richtung einen Einfluss
auf die Randspannungen?
Besteht bei 2D-Netzen ein Einfluss der Flächenorientierung (Richtung der Flächennormale)
der Elternfläche auf die maximale Spannung?
Wie wirkt der Offset der 2D-Eigenschaft (R19)?
Welchen Einfluss hat die mit abnehmender Dicke zunehmende Verzerrung der TE10-
Elemente auf Spannung und Verformung?
Welchen Einfluss haben die 2D-Netzformen Viereck und Dreieck auf Spannung und Verfor-
mung?
Wirkt sich der Einfluss der Einspannungs-Stützelemente Stirnkurve/-fläche bzw. Mantelflä-
che(n) bis zur Stützfläche des lokalen Sensors von Mises-Spannung aus?
Lohnt sich überhaupt der relativ große Aufwand zum Erstellen von 3D-Translationsnetzen?
Vorgehen:
1. Im Baum Schritt für Schritt Netz 1 bis 3 selektieren und 3D-Eigenschaft zuweisen . Weil

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 167 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
das Material bereits dem Hauptkörper und den Geometrischen Sets zugewiesen wurde,
wird es im Eigenschaftsfenster gleich angezeigt.
2. Im Baum Schritt für Schritt Netz 4 bis 6 selektieren und 2D-Eigenschaft zuweisen . Als
Stärke über Formel den Parameter Dicke zuweisen (Bild 203).
Bild 203: Zuweisen der 2D-Eigenschaft Stärke mit Formel
3. Part sichtbar schalten und am Ende der Einspannflächen feste Einspannung der hinteren
Stirnflächen für 3D-Netze bzw. der hinteren Randkurven für 2D-Netze.
4. Dichte der Kraft auf vordere Stirnflächen für 3D-Netze bzw. Randkurven für 2D-Netze,
Kraftvektor in x-Richtung mit Formel den Parameter Last_x zuweisen.
5. Berechnen, Alle.
6. Verschiebung und von Mises-Spannung anzeigen lassen.
7. Lokale Sensoren erzeugen:
Verschiebungsvektoren auf vordere Stirnflächen für 3D-Netze bzw. Randkurven für 2D-
Netze, nur Komponente C1, Nachbearbeitung Maximum und Parameter erzeugen (Bild
204) ,
von Mises-Spannung auf Mantelflächen des Kragarms, bei 3D-Netzen auf Rohraußen- und
Rohrinnenmantel, Nachbearbeitung Maximum und Parameter erzeugen.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 168 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 204: Lokale Sensoren Verschiebungsvektor in x-Richtung C1 erzeugen
8. RMT auf Baumzweig Sensoren > Alle Sensoren aktualisieren.
Modell mit Sensoren, nach dem Öffnen RMT auf Baumzweig Sensoren > Alle Sensoren aktuali-
sieren.
Ana11A_Rohr-Modellvergleich_R17.CATAnalysis
9. Auswertung der Berechnungsergebnisse.
Tabelle 19: Verformungen und Spannungen der Rohrmodelle mit Einspannung der Stirnflächen bzw. Randkurven bei 5 mm Wanddicke
Modell Nr. Verformung C1 mm
Maximale Spannung in MPa
Außenmantel Innenmantel Mantel bei 2D
(Handrechnung) 1,020 176 137
1 1,066 177 138
2 1,065 177 138
3 1,065 177 138
4 1,08 141
5 1,084 141
6 1,084 178
Tabelle 20: Verformungen und Spannungen der Rohrmodelle mit Einspannung der Mantel-flächen bei 5 mm Wanddicke
Modell Nr. Verformung C1 mm
Maximale Spannung in MPa
Außenmantel Innenmantel Mantel bei 2D
(Handrechnung) 0,794 176 137
1 0,846 177 138
2 0,842 177 139
3 0,846 177 139
4 0,848 142
5 0,852 142
6 0,852 178

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 169 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Tabelle 21: Verformungen und Spannungen der Rohrmodelle mit Einspannung der Mantel-flächen bei 2 mm Wanddicke
Modell Nr. Verformung C1 mm
Maximale Spannung in MPa
Außenmantel Innenmantel Mantel bei 2D
(Handrechnung) 1,62 360 328
1 1,737 362 327
2 1,657 356 321
3 1,738 362 329
4 1,742 328
5 1,749 332
6 1,749 362
Tabelle 22: Verformungen und Spannungen der Rohrmodelle mit Einspannung der Mantel-flächen bei 1 mm Wanddicke
Modell Nr. Verformung C1 mm
Maximale Spannung in MPa
Außenmantel Innenmantel Mantel bei 2D
(Handrechnung) 3,029 672 642
1 3,267 676 641
2 3,266 675 642
3 3,272 675 644
4 3,289 649
5 3,297 651
6 3,297 679
Tabelle 23: 2D-Rohrmodelle bei 5 mm Wanddicke und Offsetmodifikation ohne Einfluss auf die Spannungen (R20)
Offset mm
Maximale Spannung in MPa bei Modell-Nr.
(Handrechnung) 4 5 6
0 176 141 142 178
0,5 142 143 178
1 142 143 178
2 142 143 178
-2 142 143 178
Bei 1_Translation des 3D-Netzes_mehrschichtig mit HE20-Elementen wurden in radialer
Richtung 3 Schichten mit jeweils 1/3 Dicke erzeugt. Es konnte beim Rohrmodell mit 3D-
Translationsnetz kein Einfluss der Anzahl der Schichten in radialer Richtung auf die
Randspannungen festgestellt werden. Der Aufwand zum Erzeugen mehrerer Schichten ist
nicht nur ungerechtfertigt, bei der Änderung des Parameters Dicke war diese Vernetzung
auch nicht änderungsrobust. Die 2D-Begrenzungsnetze mussten nachmodelliert werden.
Kaum Einfluss haben die 2D-Netzformen Viereck und Dreieck auf Spannung und Verfor-
mung des Rohrmodells, wie der Vergleich der Modelle 4 und 5 in den Tabellen zeigt. Wer al-
so nicht über die Lizenz Advanced Meshing Tools (AMT) verfügt, kann für 2D-Elemente auch
das GSA-OCTREE-Dreiecknetz mit Elementtyp Parabolisch (TR6-Elemente) nutzen.
Die Bedeutung des Eingabewertes Offset der 2D-Eigenschaft konnte nicht geklärt werden
(R19 und R20). Zu erwarten war, dass sich mit diesem auf das Netz bezogenen Offsetwert
eventuell die Materialdicke asymmetrisch zur Elternfläche aufbringen lässt. Für das Rohrmo-
dell zeigte sich aber gem. Tabelle 23 keinerlei Einfluss. Die Erklärung in der CATIA-Hilfe
… \B19doc\German\online\German\CATIAfr_C2\estugCATIAfrs.htm, Abschnitt „2D-Eigen-
schaften erzeugen“
„Offset: Ermöglicht die Festlegung eines Netzoffsets für die Stärke. Der Offset erfolgt in der

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 170 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
senkrechten Richtung zum Netz und nicht zur Geometrie. Ein negativer Wert legt fest, dass der
Offset in entgegengesetzter Richtung zur Senkrechten erfolgt.“
ist deshalb nicht nachvollziehbar.
Erstaunlich gering, beim Rohrmodell nicht erkennbar, ist der Einfluss der mit abnehmender
Dicke zunehmenden Verzerrung der TE10-Elemente auf Spannung und Verformung. Bei ei-
ner Netzgröße von 5 mm für die Solidvernetzung im Modell 3_OCTREE-Tetraedernetz_TE10
nimmt die fehlerhafte Verzerrung der Elemente zwar von 4,6 % bei 5 mm Blechdicke auf
91 % bei 1 mm Blechdicke zu (Bild 205), was aber Spannung und Verformung nicht beein-
flusst.
Bild 205: Qualitätsanalyse der TE10-Elemente bei einer Blechdicke von 5 mm und 1 mm
Bei 2D-Netzen besteht ein erheblicher Einfluss der Flächenorientierung (Richtung der
Flächennormale) der Elternfläche auf die maximale Spannung.
Ist die Flächennormale nach außen gerichtet (Bild 206 links), erkennbar daran, dass eine
Offsetfläche außen erzeugt wird bzw. die Bedingungen und Lasten im Inneren der Rohrflä-
che angetragen sind, entsprechen die angezeigten Spannungen den Randspannungen im
Rohrinneren, also nicht den maximalen Spannungen an der Außenfläche .

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 171 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 206: Kennzeichen für die Orientierung der Flächen-normale
Bei 2D-Elementen entsprechen die angezeigten Spannungen den Spannungen in der
Randfaser, die von der Elternfläche in entgegengesetzter Richtung der Flächennorma-
le liegt. Zumindest bei Blechformteilen mit unterschiedlichen Krümmungsrichtungen sollten
wegen der schnellen Überprüfbarkeit der maximalen Spannungen die Elternflächen vom Typ
Umkehren sein (Einfügen > Operationen > Ausrichtung umkehren).
Wegen der großen Bedeutung dieser Funktion sollte der Befehl Ausrichtung umkehren
zweckmäßig in die GSD-Symbolleiste Operationen aufgenommen werden (Tools > Anpas-
sen > Register Symbolleisten, Bild 207).
Bild 207: Hinzufügen des Befehls Ausrichtung umkehren zur GSD-Symbolleiste Operationen
Der Abstand von 30 mm zwischen den Einspannungs-Stützelementen Mantelfläche(n) bis
zur Stützfläche des lokalen Sensors von Mises-Spannung ist so groß gewählt, dass kein Ein-
fluss der überhöhten Spannungsspitzen an den Einspannungen auf das Spannungsergebnis
besteht.
Der relativ große Aufwand zum Erstellen von 3D-Translationsnetzen lohnt sich nicht.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 172 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Für das Blechteil wie im Beispiel des Abschnitts 16.3.2 sind folgende Netzvarianten enthalten in
Ana12A_Vgl_3DTrans_zusKurvHE20_TE10_TR6_QD8_12lok6mm_R19.CATAnalysis
AMT-3D-Netz 1_Translation_3D-Netz_HE20 als 3D-Translation mit drei Layern von der
Blechaußen- zur Blechinnenseite,
GSA-3D-Netz 2_OCTREE-Tetraedernetz_TE10_Solid,
GSA-2D-Netz 3_2D-OCTREE-Dreiecksnetz_TR6_Umkehren und
AMT-2D-Netz 4_Erweitertes 2D-Flächennetz_QD8_Umkehren.
Trotz der mit 3 mm Blechdicke nur relativ dünnen Wand, haben alle vier Modellvarianten die
(globale) Netzgröße 12 mm, die Bereiche der Verrundungsradien 6 mm Netzgröße.
Die 2D-Netze basieren auf Flächen vom Typ Umkehren. Damit sich der Zustand leicht überprü-
fen lässt, wurde ein Parameter vom Typ Boolescher Wert Umkehren_Ja_Nein mit mehreren
Werten erzeugt und dem Parameter Aktivität der Fläche Umkehren_mit_Parameter_-
Gesamtflaeche zugewiesen (Bild 208).
Bild 208: Parameter erzeugen und dem Parameter Aktivität der Fläche Umkehren zuweisen

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 173 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 209: Verformungen und von Mises-Spannungen
Bild 209 zeigt für jede Vernetzungsvariante die maximalen Verformungen an zwei Randkurven
und die Maximalwerte der von Mises-Spannungen an zwei anderen Randkurven. Die Spannun-
gen an der oberen Kerbe sind mit großen Unsicherheiten behaftet. Sonst stimmen die Werte der
Modelle 1 und 2 praktisch überein. Bezogen auf das sehr einfach zu modellierende TE10-Modell
ergeben sich Abweichungen gem. Tabelle 24
Tabelle 24: Relative Verformungs und Spannungsabweichungen
Modell 1 2 3 4
Verformung ebener Ansatz links unten 99,4 % 100 % 101,4 % 101,1 %
Verformung S-Ansatz rechts unten 100 % 100 % 103,3 % 103,2 %
von Mises ebener Ansatz links unten 98,8 % 100 % 90,2 % 92,9 %
Bei der Bewertung der Maximalwerte der Spannungen an der unteren Kurve ist zu beachten,
dass wegen der groben Netzgröße von 12 mm diese maximalen Knotenspannungen an etwas
unterschiedlichen Stellen liegen könnten.
Problematischer ist die Bewertung der Spannungen an Kerben, z. B. angezeigt durch die lokalen

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 174 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Sensoren von Mises-Spannung.2_xxx an der oberen Kante des Ausschnittes. Bei den 3D-
Modellen liegen die Knoten mit den maximalen Spannungen an der Blechinnenseite. Um mit den
Spannungen der 2D-Modelle vergleichen zu können, muss die Flächenorientierung durch Setzen
des Parameters Umkehren_Ja_Nein auf Unwahr geändert werden. Nach Neuberechnung wer-
den die Spannungen statt an der Blechaußenseite an der Blechinnenseite angezeigt.
Modell: 1 2 3 4
max Mises in MPa: 269 320 163 Innenseite 309 145 Innenseite 221
Bei 2D-Netzen sollte immer die Berechnung mit beiden Varianten der Flächenorientierung
durchgeführt werden!
Werden die lokalen Netzgrößen an der Kerbe verkleinert, erhöhen sich die Spannungen wesent-
lich. Beispielsweise für das Modell Ana13A_Vgl_Kerbe_TE10_TR6_QD8_12_lok6R_lok1-
Kerb_R17.CATAnalysis
Netzgröße an der Kerbe 6mm 2 mm 1 mm
Tetraedernetz_TE10_Solid 271 MPa 431 MPa 602 MPa
Dreiecksnetz_TR6 316 MPa 427 MPa 681 MPa
(TR6 mit Vernetzung der Kerbenbereichsfläche statt nur der Kanten 713 MPa)
Flächennetz_QD8 273 MPa 447 MPa 601 MPa
Das ist ein allgemeiner Trend, wenn auch die Spannungsspitzen an einzelnen Knoten mit einer
gewissen Skepsis zu betrachten sind. Außerdem werden bei duktilem Blech die Spannungsspit-
zen in der Kerbe wahrscheinlich durch örtliche plastische Verformung abgebaut.
Festzustellen ist auch für dieses Blechteil, dass sich bei viel geringerem Modellierungsaufwand
mit GSA-OCTREE-Netzen, insbesondere Tetraedernetzen, die gleichen Ergebnisse erzielen las-
sen wie mit wesentlich aufwändiger zu erstellenden AMT-Netzen. Während die GSA-OCTREE-
Netzgrößen über Parameter modifiziert werden können, müssen die AMT-Netze nach Parame-
termodifikation (einschließlich Änderung des Booleschen Wertes für Umkehren) neu bearbeitet
werden. Auch deshalb wird auf die Beispiele des Vorgängerskripts zum Verbinden der AMT-
Netze unterschiedlicher Körper bzw. der Teile einer Baugruppe verzichtet.
16.3.6 Beispiel Winkel
Wegen der umständlichen AMT-Modellierung hatte sich der Autor kaum mit AMT befasst. Eine
Anfrage im CATIA-Forum http://ww3.cad.de/foren/ubb/Forum395/HTML/001142.shtml zur Model-
lierung eines Winkels ähnlich Bild 210 mit Hexaederelementen führte letztlich zur Ergänzung
dieses Skripts nach sehr vielen Modellierungsversuchen.
Bild 210: Winkel mit Bohrungen
Eigentlich ist Hexaedervernetzung für Simulationen mit dem CATIA-Elfini-Solver
nicht sinnvoll. Die Aufgabenstellung für Studenten resultiert wahrscheinlich dar-
aus, dass die Simulationsergebnisse von CATIA mit denen anderer FEM-
Programme verglichen werden sollen, bei denen vorrangig mit Hexaederelemen-
ten modelliert wird.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 175 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bei AMT-Hexaedervernetzung muss der Winkel wegen der Bohrungen aus mehreren Teilnetzen
aufgebaut werden. Das Problem besteht vor allem in der Kopplung dieser Netze durch entspre-
chenden Knotenfang.
Im Modell AnalysisForum_Winkel_mitBohrungen_3x3D-Transl_2DKopplflaechen_2zu0mm_-
R19.CATAnalysis wurden erstellt
die 3D-Translationsnetze für das obere Winkelstück und das Bohrungsstück mit einem Spalt
von 2 mm zwischen ihnen,
zwei 2D-Kopplungsflächen oberhalb und unterhalb des Bohrungsstückes,
das 3D-Translationsnetz des unteren Winkelstückes (erstaunlicherweise) ohne Spalt.
Nach schrittweiser Reduzierung des oberen Spaltes von 2 mm auf 0 mm (Ebene verkürztes
Winkelstück oben, Offset von 2 auf 0mm) wurden die Netzknoten hinreichend gefangen. Leider
war dieses Modell nicht reproduzierbar. Versuche mit genau gleicher Vernetzung und anschlie-
ßenden vielen Modifikationen führten nicht zum hinreichenden Netzfang am oberen Winkelstück.
Das Fangen der Netzknoten mittels 3D-Extru-sions-Kopplungsfläche funktioniert wegen der etwas unterschiedlichen Flächengrößen nicht vollständig (Bild 211).
Bild 211: Netzknoten in der Mitte der Vorderkante durch Kopplungs-Extrusionsnetz nicht gefangen
Eine Modellierungsalternative zum Verbinden der AMT-3D-HE20-Netze sind Flächenschweiß-
verbindungen.
Startmodell Winkel mit Bohrungen R19.CATPart
Winkelstück mit Bohrungen als 3D-Translation aus dem Volumen Trennen.2 Boh-
rungsschenkelstück
2D-Netze hinten und vorn mit „Erweiterter Flächennetzerzeugung“, 5 mm Netz-
größe, nur Quader, als Bedingungen die Scheitelpunkte der Bohrungskreise und
als erzwungene Elemente die Bohrungskanten mit z. B. je 6 Elementen.
Bild 212: AMT-Netz Bohrungsstück
3D-Translation, Register Netz Typ: Einheitlich, 3 Layer, Toleranz aus Initialisieren
Wenn bei den 2D-Elternnetzen für die 3D-Translation nicht alle erforderlichen Scheitelpunkte als
Bedingungen festgelegt wurden, können Netzknoten an Führungselementen der 3D-Translation
fehlen. Statt die 2D-Netze zu bearbeiten, können bei nur wenig fehlenden Netzknoten auch Füh-
rungselemente ausgeschlossen werden (Bild 213).

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 176 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 213: Führungselement bei fehlendem Netzknoten ausschließen
Zwischenstand Analysis1_Winkel mit Bohrungen R19.CATAnalysis
Oberes Winkelstück als 3D-Extrusion mit Verschiebung aus dem Volumen Trennen.4 obe-
res Winkelstück
2D-Netz links mit „Erweiterter Flächennetzerzeugung“, 5 mm
Netzgröße, nur Quader, als Bedingungen die zwei Radien und
als erzwungene Elemente die Radiuskante mit versuchsweise
geometrischer Elementverteilung.
Bild 214: Versuch mit geometrischer Elementverteilung
Das 2D-Netz soll im Bereich eines eventuell später zu modellierenden Lasteinleitungsnet-
zes einen dicht am Lasteinleitungsnetz liegenden Knoten haben. Die Variante mit geomet-
rischer Elementverteilung hat ein zu feinteiliges Netz.
Zwischenstand Analysis2-Versuch geomVerteilg_Winkel mit Bohrungen R19.CATAnalysis
Als Alternativen bieten sich an:
vorderen Radius von der Fläche ableiten und in zwei Bogenstücke unterteilen,
vorderen Verrundungsradius in der Profilskizze teilen,
kleine Flächen in das Volumen integrieren (Kurve würde auch genügen).
Die letztgenannte Variante und zusätzlich statt der Bohrungskreise als Bedingungen vier
Bohrungshalbkreise wurden im Modell für Kopplungs-Schweißverbindungen genutzt Analy-
sis3_Winkel_mitBohrungen_Ergaenzgsgeo_R19.CATAnalysis.
Zwischenstand in diesem Modell
Drei 3D-Translationsnetze mit 1 mm-Spalten dazwischen und
vier „Erweiterte Flächennetze“ für zwei Flächenschweißverbindungen.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 177 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Kopplung der 3D-Translationsnetze mit AMT-Flächenschweißverbindungen
CATIA-Hilfe /B19doc/German/online/German/fmsug_C2/fmsugut0505.htm
Analyse von Flächenverbindungen gem. Bild 215
Bild 215: Analyse von Flächenverbindungen als Basis der Flächenschweißverbindungen
Flächenschweißverbindungsnetz gem. Bild 216
Die maximale Lücke zweckmäßig durch Messen
zwischen den erweiterten Flächennetzen festle-
gen, Selektion im Baum sinnvoll.
Bild 216: Flächenschweißverbindungsnetz
Zwischenstand Analysis4Schweiss_Winkel_mitBohrungen_Ergaenzgsgeo_R19.CATAnalysis
Wechsel in die Umgebung GSA Eigenschaften der Flächenschweißverbindungen im
Baum mit gelbem Ausrufezeichen, d. h. zu aktualisieren.
Zunächst Benutzermaterial auswählen (Bild 217 oben).
Doppelklick auf zu aktualisierende Eigenschaften und Benutzermaterial gem. Bild 217 zu-
weisen.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 178 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bild 217: Eigenschaften der Flächenschweißverbindungen definieren und Spannungsergebnis ohne Flächengleitlager
Bei der Darstellung der von Mises-Spannungen als „Durchschnittliches ISO“ werden die Flä-
chenbereiche nicht dargestellt, deren Knoten gefangen wurden. Alle Flächenbereiche zeigt die
Darstellungsvariante „Diskontinuierliches ISO“. Generell können natürlich die Knotenspannungen
an Kopplungs-, Lagerungs- und Lasteinleitungsstellen nicht als Realwerte angenommen werden.
Ergebnis
Analysis5-5mmKopplnetze_GSA_Winkel_mitBohrungen_Ergaenzgsgeo_R19.CATAnalysis.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 179 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
16.3.7 Beispiel Hagelschlag auf PKW-Dach
16.3.7.1 Vorbemerkungen
Bei diesem Beispiel kommt es vorrangig auf die Modellierung an. Die durch grobe Annäherung
erzielten Ergebnisse sind nicht belastbar. Dazu fehlen dem Autor die sicher im Automobilbau
verfügbaren Versuchsergebnisse (z. B. vom FKA sonstVkn\gb2-12benchmarking_closures.pdf).
Nach den auch auf starken Vereinfachungen basierenden Tabellen der Versicherungen zur In-
tensitäts- und Schadensklassifikation von Hagel sollten Hagelkörner mit einem Durchmesser un-
ter 25 mm keine plastischen Verformungen verursachen (Tabelle 25).
Tabelle 25: Schadenspotenzial von Hagel
Durchmesserbereich in mm Bezeichnung und Schadenspotenzial
25 bis 35 Mittelgroßer Hagel. Je nach Härte und Form der Hagelkörner treten erste bedeu-
tende Schäden auf. Deshalb gilt Hagel ab dieser Größe als Schadhagel. Kleinere
Dellen oder Druckstellen am Auto sind möglich. …
40 bis 50 Großer Hagel. Verbreitet hohes Schadenspotenzial. Tiefe Dellen und Lackschäden
am Auto. Fenster- und Autoscheiben werden beschädigt und ggf. durchschlagen.
Kunststoffteile werden zerschlagen.
Beim Aufschlag des vereinfachend als Kugel angenommenen Hagelkornes auf das PKW-Dach
handelt es sich um einen Stoß, der voll elastisch sein sollte. Unbekannt ist der die Verformung
des Daches bewirkende Anteil der Aufschlagenergie des Hagelkornes.
Aktuell werden für PKW-Dächer Blechdicken zwischen etwa 0,7 mm und 0,9 mm verwendet. Als
Werkstoffe kommen noch Tiefziehblech, zunehmend aber höherfeste Stähle zum Einsatz, z. B.
1.0132 DC 05 DIN EN 10130 mit Re = 140 … 180 MPa ,
1.0396 HC 220 B DIN EN 10268 mit Rp 0,2 min = 255 … 305 MPa nach der Streckgren-
zenerhöhung durch Wärmeeinwirkung BH2.
Näherungsweise soll zunächst geprüft werden, welcher Anteil der Aufschlagenergie des Hagel-
kornes mit einem Durchmesser von 20 mm bei einer Blechdicke von 0,7 mm (VW) maximal vom
Blech aufgenommen werden kann, ohne die von Mises-Spannung 140 MPa zu überschreiten.
Für die vereinfachende Annahme statischer Bedingungen muss dieser Anteil der kinetischen
Energie des auftreffenden Hagelkornes gleich der Verformungsenergie des PKW-Dachs sein,
wobei die Ergebnisse des Elfini-Solvers nur bis zur Proportionalitätsgrenze genau sind, in grober
Näherung maximal bis zu Rp 0,2-Grenze.
Es wird davon ausgegangen, dass die Verformung infolge des Hagelschlages nur in einem be-
grenzen Bereich wirkt, also nicht das gesamte Dach zu modellieren ist. Durch Aufbringen ver-
schiedener Laststufen kann die Federzahl des Daches auf Linearität überprüft werden.
Nach Pruppacher, H. R.; Klett, J. D.: Microphysics of cloud and precipitation. Dordrecht: Kluwer
Academic Publisher, 1997, S. 444, errechnet sich die Endfallgeschwindigkeit für Hagelpartikel
größer 20 mm zu

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 180 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
v = 3,93 D0,5 (47)
Nach Blahak, Ulrich: Analyse des Extinktionseffektes bei Niederschlagsmessungen mit einem C-
Band Radar anhand von Simulation und Messung. Universität Karlsruhe, Fak. f. Physik. Diss. v.
28.05.2004, S. 74
gilt v = 3,8 D0,5 (48)
„für Newtonsche Reibung, Widerstandsbeiwert 0,6 nach Rasmussen und Heymsfield, 1987,
i = 900 kg/m³, Luft = 1,2 kg/m³“.
Bei einer Dichte von = 900 kg/m³ für Eis und einer idealisierten Kugelform mit Durchmesser
D 20 mm ist die kinetische Energie des Hagelkorns beim Aufschlag nach (47)
D93,31062
Dv
2
mE 2
9
32
kH
, (49)
EkH = 3,64 D4 10-6. (50)
Der vom Dachblech aufzunehmende Anteil der kinetischen Energie betrage
EkD = m EkH (51)
mit m << 1.
Mit der Federzahl des Daches cD errechnet sich die aus dem Hagelschlag resultierende, verein-
facht als statisch angenommene Kraft FH auf das Dach aus dem Gleichsetzen von kinetischer
Energie und Federarbeit WF
D
2H
FkHkDc
FWEmE , (52)
kDDH Ec2F . (53)
16.3.7.2 Elterngeometrie der Vernetzungsvarianten
Der Dachausschnitt wird zum Vergleich der Vernetzungsarten in 5 Varianten modelliert. Damit im
bereich des Kontaktes zwischen Hagelkorn-Kugel und Dach kleinere lokale Netzgrößen definiert
werden können, wird der Körper aus ringförmigen „Aufmaßflächen“ aufgebaut. Für 3D-OCTREE-
Netze könnten auch wie bei der Kugel Teilflächen integriert werden, aber das funktioniert nur mit
wesentlichen Einschränkungen bei 2D-OCTREE-Dreiecknetzen.
Der Dachausschnitt ist krümmungsstetig. Daraus resultieren Einschränkungen für 2D-AMT-
Netze. Die internen Grenzen krümmungsstetiger, von unmittelbar darunter liegenden Volumen
abgeleiteter Flächen lassen sich beim Erzeugen von 2D-Netzen in der Umgebung AMT weder
als Kanten noch als Kurven selektieren. Deshalb sind extra Bereichsgrenzkurven zu erzeugen,
die als Bedingungen vom Typ Kurve für das Netz festgelegt werden sollen.
v D
m/s mm
v D
m/s mm
Ek1 D
Nm mm

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 181 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Für folgende Varianten sind im Startmodell
Bgr_HagelschlagV1_t0,7_glob5_R17.CATProduct
die Körper und Flächen bereitgestellt:
1 GSA-3D-OCTREE-Tetraedernetz mit einem Körper (Solid) als Elternelement,
2 AMT-2D-Erweitertes Flächennetz mit einer Fläche und Bereichsgrenzkurven als Eltern-
elemente für automatischen Netzfang zum Verschmelzen von Knoten zwischen Dachnetz
und Kugelnetz,
3 AMT-2D-Erweitertes Flächennetz ohne automatischen Netzfang mit einer Fläche und Be-
reichsgrenzkurven als Elternelemente,
4 AMT-2D-Erweitertes Flächennetz ohne automatischen Netzfang mit einer Fläche des Typs
Umkehren und Bereichsgrenzkurven als Elternelemente,
5 GSA-3D-OCTREE-Dreiecknetz mit einer von dem unmittelbar darunter liegenden Volu-
men abgeleiteten und in den Typ Umkehren gewandelten Elternfläche.
16.3.7.3 GSA-OCTREE-Netze
Beim Starten der Umgebung GSA werden der im Hauptkörper befindliche Dachausschnitt und
die fünf Kugeln automatisch vernetzt. Diese Netze sind allerdings zu modifizieren.
Für alle Netze ist der Elementtyp Parabolisch zu wählen.
OCTREE-Tetraedernetz.1 : Dachausschnitt_rund.1 (TE10-Elemente).
Register Global: Größe mit Formel den Parameter vom Teil Dachausschnitt zuweisen
Dachausschnitt_rund\globale_Netzgroesse, nur proportionaler Durchhang 0,3.
Register Lokal: Lokale Größe Hinzufügen > Name „lokal Ringe aussen“, Stützelemente
die 3 äußeren Ringe, beim Solid ggf. jeweils auf der Blechaußen- und –innenseite, Wert mit
Formel den Parameter Dachausschnitt_rund\Abstand_Aussenringe zuweisen.
In gleicher Weise lokale Netzgrößen für die Innenringe und die Kontaktfläche definieren.
OCTREE-Tetraedernetz.2 : Eiskugel_V1.1 bis Eiskugel.5.
Register Global: Größe mit Formel den Parameter vom Teil Eiskugel zuweisen
Eiskugel\globales_Kugelnetz, nur proportionaler Durchhang 0,2.
Register Lokal: Lokale Größe Hinzufügen > Name „lokal Kontaktflaeche“, als Stützele-
ment im Baumzweig Hauptkörper Fläche integrieren.1 selektieren, Wert mit Formel den Pa-
rameter Eiskugel\Netzgroesse_Kontaktflaeche zuweisen.
Vorgang für die restlichen vier Kugel-Tetraedernetze wiederholen.
Das Modell 5 soll ein GSA-OCTREE-Dreiecknetz (TR6-Elemente) erhalten. Dazu muss im Teil
Dachausschnitt, Baumzweig Flaechenvarianten, die Fläche Umkehren_2_2D_OCRTEE_Formel
aktiv sein, d. h. der Parameter Umschalten_Umkehren_2DOCTREE muss zunächst den Boole-
schen Wert Wahr erhalten. Mit dem Befehl OCTREE-Dreieckvernetzung das Netz erzeugen.
Dann das Netz in gleichen Schritten wie das Tetraedernetz modifizieren. Zusätzlich zu den drei
lokalen Netzgrößen
Register Lokal: Verteilung der Kanten Hinzufügen > 7 Kanten der Bereichsgrenzen selek-
tieren, auf denen dadurch Netzknoten erzwungen werden.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 182 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
RMT auf Baumzweig Knoten und Elemente > Netzdarstellung
Zwischenstand gespeichert in Ana22_Bgr_HagelschlagV1_t0,7_glob5_OCTREENetze_R17.CATAnalysis.
16.3.7.4 AMT-2D-Netze
Drei verschiedene AMT-Netze sollen gegenübergestellt werden. Die Elternelement-Flächen be-
finden sich im Teil Dachausschnitt, Baumzweig Flaechenvarianten. Wechseln in die Umgebung
AMT.
Netz mit automatischem Fang des anliegenden Kugel-Tetraedernetzes erzeugen. Durch das
Verschmelzen der Netzknoten ist keine zusätzliche Verbindung zwischen Kugel und Dach-
fläche erforderlich.
In V2_Mehrfachausgabe_Verschieben_2DAMT_Netzfang Verschieben_2DAMT_Netzfang
als Elternfläche markieren. > Befehl Erweiterte Flächennetzerzeugung.
Register Netz:
Netzgröße mit Formel den Parameter Dachausschnitt_rund\globale_Netzgroesse vom Teil
Dachausschnitt zuweisen, Offset 0 mm,
Dreiecke minimieren oder Nur Quader,
Automatische Netzerfassung, die Toleranz zunächst mit 0,5 mm wählen. Die Toleranz ist
nachträglich so zu modifizieren, dass nur die gewünschten Knoten des Kugelnetzes gefan-
gen werden.
Register Geometrie: Werte wie auf Bild 191, Toleranz für automatische Kurvenerfassung
von 0,5 mm ist wahrscheinlich nachträglich zu modifizieren.
Befehl Bedingungen hinzufügen/entfernen .
Die Grenzkurven als Bedingungen hinzufügen mit Ausnahme der Kontaktflächengrenzkur-
ve, weil stattdessen dort die Knoten des Kugelnetzes bereits gefangen sind (Bild 218).
Bild 218: Kurven als Bedingungen hinzufügen

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 183 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Bei Bedarf mit dem Befehl Globale Vernetzungsparameter die Toleranzen modifizieren.
Im Beispielmodell wurden die Toleranzen festgelegt auf 0,15 mm für Knotenfang und 0,2 mm
für Kurvenfang.
Je nach Knotenfang kann es notwendig sein, mit dem Befehl Erzwungene Elemente auf
der Randkurve des Dachausschnittes Punkte mit dem Abstand der globalen Netzgröße zu
definieren, damit das an der Randkurve beginnende Netz gegenüber den Vergleichsnetzen
nicht zu grobmaschig wird.
Befehl Vernetzen
Netz modifizieren mit dem Befehl Domäne neu vernetzen .
Der Kontaktflächenbereich wurde mit 0,5 mm „Vorderen Dreiecken“ vernetzt, der Außenbe-
reich mit der globalen Größe 5 mm „Zugeordnete Quadrate“, die Außenringe mit dem Ring-
abstand 2 mm als „Zugeordnete Quadrate“. Ggf. sind gut vernetzte Domänen zu sperren.
Für die Innenringe sind Dreiecknetze mit 1 mm Größe gewählt worden.
Vernetzung bearbeiten , um zumindest rot gekennzeichnete Netzmaschen mit schlech-
ter Qualität zu beseitigen und ggf. die Maschenverteilung zu verbessern.
Wenn Bedingungen oder erzwungene Elemente nachträglich zu bearbeiten sind, müssen
erst das Netz und die Vereinfachungen entfernt werden.
Vor dem Beenden der Flächennetzerzeugung auf unvernetzte Domänen überprüfen .
Die Flächenvarianten 3 und 4
V3_Mehrfachausgabe_Verschieben_2DAMT_ohne_Netzfang/Verschieben_2DAMT_ohne_-
Netzfang und V4_Umkehren_AMT2D_ohne_Netzfang ähnlich V2 vernetzen. Weil nach Än-
dern des Booleschen Wertes für Umkehren die AMT-Netze neu zu bearbeiten wären, sind
zur Gegenüberstellung gleich V3 und V4 vorgesehen worden. Beide Flächen sind deshalb
auch möglichst identisch zu vernetzen.
Unterschiedlich zu V2 sind: Keine automatische Netzerfassung und keine automatische Kur-
venerfassung.
Im Beispiel wurde vernetzt:
Kontaktflächenbereich 0,5 mm „Vordere Dreiecke“,
Außenbereich mit der globalen Größe 5 mm „Zugeordnete Quadrate“,
Außenringe mit dem Ringabstand 2 mm als „Zugeordnete Quadrate“,
Innenringe 1 mm „Vordere Dreiecke“ und anschließend Vernetzung bearbeitet.
Zwischenstand mit Parameter Umkehren Unwahr und erzwungenen Punkten auf der Randkurve
des Netzes V2 mit Netzfang
Ana23_Bgr_HagelschlagV1_t0,7_glob5_alleNetze_R17.CATAnalysis
16.3.7.5 Bedingungen, Lasten, Verbindungen
In der Umgebung GSA werden folgende Bedingungen und Lasten zugewiesen:
Feste Einspannungen der Randfläche des Solids bei V1 und feste Einspannungen der
Randkurven bei V2 bis V5 vornehmen.
Alle Kugeln mit benutzerdefinierten Randbedingungen versehen, dabei alle Freiheitsgra-

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 184 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
5 4 3 2 1 5 4 3 2 1
de mit Ausnahme der 3. Verschiebung (z-Richtung) sperren.
Dichte der Kraft auf die Kugeln, Kraftvektor in Z mit der Formel Minus Parameter aus Steuer-
teil „-Steuerteil_Bgr_Hagel\Testkraft_auf_Kugel“.
Zwischen den Kugeln und den Flächen der Varianten 1 und 3 bis 5 soll eine Gleitverbindung (al-
ternativ Kontaktverbindung) die Kraft von den Kugeln auf die Flächen übertragen. Dazu sind für
jede Variante zwei Schritte erforderlich:
Analyse allgemeiner Verbindungen , wobei als erste Komponente die Kontaktfläche des
Dachausschnittes am Bild (Eiskugel verdecken) selektiert wird und als zweite Komponente
Fläche integrieren.1 im Hauptkörper des Baums der zugehörigen Eiskugel,
Eigenschaft der Gleitverbindung mit der jeweiligen Analyseverbindung als Stützelement.
Zwischenstand: Ana24_Bgr_HagelschlagV1_t0,7_glob5_Bed_Last_Verb_R17.CATAnalysis
16.3.7.6 Berechnung und lokale Sensoren
Vor der Berechnung sind für den vier 2D-Netze noch 2D-Eigenschaften zu definieren. Als
Stärke wird mit Formel der Parameter des Dachflächenausschnittes t_Blechdicke zugewiesen.
Im Steuerteil ist u. a. der Parameter für die Last definiert, im Beispielmodell 60 N.
Die Ergebnisse Verformtes Netz, Translationsverschiebungsgröße uns von Mises-Spannungen
sind auf Plausibilität zu prüfen, um ggf. die Modelle anzupassen.
So ist bei einer globalen Netzgröße von 10 mm und der geringen Blechdicke das Tetraedernetz
offensichtlich zu stark verzerrt und deshalb das Modell 1 wesentlich zu steif (Bild 219). Außer-
dem zeigt Variante 2 mit Netzfang ein gröberes Netz als die AMT-2D-Netze der Varianten 3 und
4.
Wird die globale Netzgröße auf 5 mm verringert und zusätzlich bei Variante 2 mit Netzfang durch
erzwungene Punkte auf der Randkurve mit 5 mm Abstand ein engeres Netz erzeugt, zeigt sich
im Bild 220 recht gute Übereinstimmung.
Zur besseren Vergleichbarkeit und für Berechnungen sollen lokale Sensoren für die Anzeige der
Verformungen und der von Mises-Spannungen genutzt werden.
Stützelement für die Verschiebungsgröße ist die Dach-Kontaktfläche, Nachbearbeitung Maxi-
mum, Parameter erzeugen.
Als Stützelemente für die Spannungssensoren bei der Solid-Variante 1 sollten die Flächen des
Kontaktbereichs auf beiden Seiten des Bleches genutzt werden, weil noch nicht klar ist, ob die
Bild 219: Verformung bei globaler Netzgröße 10 mm
Bild 220: Verformung bei globaler Netzgröße 5 mm

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 185 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
maximalen Spannungen in der gestauchten oder der gedehnten Randschicht auftreten. Außer-
dem ist zum Erkennen übertriebener Knotenspannungen infolge der stark verzerrten TE10-
Elemente bei dünnem Blech ein „Kontroll“-Spannungssensor sinnvoll, der statt der Maximalwerte
die Durchschnittsspannung anzeigt.
Für die 2D-Flächen genügen in der Regel auch die Kontaktflächen. Allerdings treten bei dem
AMT-2D-Netz der Variante 2 mit Netzfang u. U. die maximalen Knotenspannungen gar nicht im
Kontaktflächenbereich auf, sondern weiter außen (Bild 221). Deshalb sind als Stützelemente die
Kontaktfläche und ein oder zwei anschließende Ringflächen auszuwählen.
Bild 221: Von Mises-Spannung im Kontaktflächenbereich der Variante 2 mit Netzfang und der Variante 3 mit Gleitverbindung ohne Netzfang
16.3.7.7 Auswertung der Ergebnisse
Die Ergebnisse im Modell
Ana25_Bgr_HagelschlagV1_t0,7_glob5_Ergebn_Sens_R17.CATAnalysis
zeigen relativ gute Übereinstimmung der Verformungswerte ( 1,2 %), aber größere Spannungs-
unterschiede.
Bei Variante 4 wird wegen der Flächenorientierung die etwas niedrigere Spannung an der Unter-
seite des Bleches, also der gedehnten Randschicht angezeigt. Das lässt sich leicht durch Ändern
des Parameters Umkehren im Teil Dachausschnitt für das 2D-OCTREE-Dreiecknetz Variante 5
überprüfen.
Aus dem Rahmen fällt die überhöhte Spannung an den verschmolzenen Netzknoten bei Variante
2. Deshalb ist eine solche Modellierung nicht zu empfehlen.
Als Parameter in der Analyse werden die Federzahlen Steife_V1, Steife_V3 und Steife_V5 be-
rechnet und daraus der Anteil der Aufschlagenergie des Hagelkorns, der als Federarbeit bis zum
Erreichen der Fließgrenze aufgenommen wird. Mit nur ca. 2,6 % bei einem Blech aus DC 05 mit

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 186 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
0,7 mm Dicke (VW) bzw. ca. 4,4 % bei einem Blech aus Bake-Hardening-Stahl HC 220 B mit
0,84 mm Dicke (Daimler) liegt der Schluss nahe, dass die grobe Näherung mit der statischen
Federarbeit den realen Hagelschlag unzureichend modelliert.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 187 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
17 FEM-Elemente im Elfini Solver
Quelle: Finite Element Reference Guide R19
Name of the finite element Type Physical Property Mesh Connectivity
Linear triangle
Surface element
shell membrane
TR3
Parabolic triangle TR6
Linear quadrangle shell
membrane shear panel
QD4
Parabolic quadrangle shell
membrane QD8
Linear tetrahedron
Solid element solid
TE4
Parabolic tetrahedron TE10
Linear pentahedron WE6
Parabolic pentahedron WE15
Linear hexahedron HE8
Parabolic hexahedron HE20
Beam
Lineic element
beam
BAR
Linear Bar bar
Parabolic Bar bar
Spring spring
Coincident rigid body motion
Contact rod contact
Tightening beam tightening
Periodic condition periodic
Rigid Beam rigid body motion
Rigid spider Spider element
rigid body motion SPIDER
Smooth spider smooth body motion
Fastened join
Join element
smooth body motion
SPIDER
Slider join slider
Contact join contact
Tightening join tightening
Fitting join pressure fitting
Linear Triangle is a three-nodes plate finite element with flexing and transverse shear based on the Reiss-
ner/Mindlin theory (thick plates).
Type surface element Physical property shell, membrane Mesh connectivity TR3 Number of nodes 3 Degrees of freedom (per node) 6 (3 translations and 3 rotations) Type of behavior elastic This element has only one gauss point: the gravity center of the triangle (P1).

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 188 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Parabolic Triangle is a six-nodes surface element based on the Degenerate Solid
theory.
Type surface element Physical property shell, membrane Mesh connectivity TR6 Number of nodes 6 Degrees of freedom (per node) 6 (3 translations and 3 rotations) Type of behavior elastic This element has three gauss points with intrinsic coordinates: P1 (1/6 ; 1/6) P2 (2/3 ; 1/6) P3 (1/6 ; 2/3)
Linear Quadrangle is a four-nodes surface element based on the Reiss-
ner/Mindlin theory.
Type surface element Physical property shell, membrane, shear panel Mesh connectivity QD4 Number of nodes 4 Degrees of freedom (per node) 6 (3 translations and 3 rotations) Type of behavior elastic This element has three gauss points with intrinsic coordinates: P1 (1/6 ; 1/6) P2 (2/3 ; 1/6) P3 (1/6 ; 2/3)
Parabolic Quadrangle is a eight-nodes surface element based on the
Reissner/Mindlin theory.
Type surface element Physical property shell, membrane Mesh connectivity QD8 Number of nodes 8 Degrees of freedom (per node) 6 (3 translations and 3 rotations) Type of behavior elastic This element has four gauss points: P1 (- /2 ; - /2) P2 ( /2 ; - /2) P3 ( /2 ; /2) P4 (- /2 ; /2)
Linear Tetrahedron is a four-nodes isoparametric solid element.
Type solid element Physical property solid Mesh connectivity TE4 Number of nodes 4 Degrees of freedom (per node) 3 (translations) Type of behavior elastic This element has only one gauss point: the gravity center (P1) of the tetrahedron.
Parabolic Tetrahedron is a ten-nodes iso-parametric solid element.
Type solid element Physical property solid Mesh connectivity TE10 Number of nodes 10 Degrees of freedom (per node) 3 (translations) Type of behavior elastic This element has four gauss points: P1 (0,138 ; 0,138 ; 0,138) P2 (0,138 ; 0,138 ; 0,585) P3 (0,138 ; 0,585 ; 0,138) P4 (0,585 ; 0,138 ; 0,138)

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 189 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Linear Pentahedron is a six-nodes solid element.
Type solid element Physical property solid Mesh connectivity WE6 Number of nodes 6 Degrees of freedom (per node) 3 (translations) Type of behavior elastic This element has four gauss points: P1 (0,138 ; 0,138 ; 0,138) P2 (0,138 ; 0,138 ; 0,585) P3 (0,138 ; 0,585 ; 0,138) P4 (0,585 ; 0,138 ; 0,138)
Parabolic Pentahedron is a fifteen-nodes solid element.
Type solid element Physical property solid Mesh connectivity WE15 Number of nodes 15 Degrees of freedom (per node) 3 (translations) Type of behavior elastic This element has eight gauss points: P1 (0,1667 ; 0,1667 ; 0,577) P2 (0,6667 ; 0,1667 ; 0,577) P3 (0,1667 ; 0,6667 ; 0,577) P4 (0,1667 ; 0,1667 ; -0,577) P5 (0,6667 ; 0,1667 ; -0,577) P6 (0,1667 ; 0,6667 ; -0,577)
Linear Hexahedron is a eight-nodes solid element.
Type solid element Physical property solid Mesh connectivity HE8 Number of nodes 8 Degrees of freedom (per node) 3 (translations) Type of behavior elastic This element has eight gauss points: P1 (0,5774 ; 0,5774 ; 0,5774) P2 (0,5774 ; 0,5774 ; -0,5774) P3 (0,5774 ; -0,5774 ; 0,5774) P4 (0,5774 ; -0,5774 ; -0,5774) P5 (-0,5774 ; 0,5774 ; 0,5774) P6 (-0,5774 ; 0,5774 ; -0,5774) P7 (-0,5774 ; -0,5774 ; 0,5774) P8 (-0,5774 ; -0,5774 ; -0,5774)
Parabolic Hexahedron is a twenty-nodes solid element.
Type solid element Physical property solid Mesh connectivity HE20 Number of nodes 20 Degrees of freedom (per node) 3 (translations) Type of behavior elastic This element has eight gauss points: P1 (0,5774 ; 0,5774 ; 0,5774) P2 (0,5774 ; 0,5774 ; -0,5774) P3 (0,5774 ; -0,5774 ; 0,5774) P4 (0,5774 ; -0,5774 ; -0,5774) P5 (-0,5774 ; 0,5774 ; 0,5774) P6 (-0,5774 ; 0,5774 ; -0,5774) P7 (-0,5774 ; -0,5774 ; 0,5774) P8 (-0,5774 ; -0,5774 ; -0,5774)

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 190 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Beam is a two-nodes straight beam element with transverse shear based on the Timoshenko theo-
ry.
Type lineic element Mesh connectivity BAR Physical property beam Number of nodes 2 Degrees of freedom (per node) 6 (3 translations and 3 rotations) Type of behavior elastic
Linear Bar element is a two-nodes bar element with stiffness along their axis.
Type lineic element Physical property bar Mesh connectivity BAR Number of nodes 2 nodes Degrees of freedom (per node) 3 translations Type of behavior elastic
Parabolic Bar element is a three-nodes bar element with stiffness along their axis.
Type parabolic element Physical property bar Mesh connectivity BAR Number of nodes 3 nodes Degrees of freedom (per node) 3 translations Type of behavior elastic
Spring represents three translation and three rotational springs of stiffness, coupling two coincident
points of a structure.
Type lineic element Physical property spring Mesh connectivity BAR Number of nodes 2 Degrees of freedom (per node) 6 (3 translations and 3 rotations) Type of behavior elastic
Coincident is a two-nodes finite element that has no sense if the two nodes are not coincident.
Type lineic element Physical property rigid body motion
Mesh connectivity BAR Number of nodes 2 Degrees of freedom (per node) 6 (3 translations and 3 rotations) Type of behavior rigid
Contact Rod element with two nodes is used to impose a minimal clearance between the nodes
in the direction joining these two nodes.
Type lineic element Physical property contact Mesh connectivity BAR Number of nodes 2 Degrees of freedom (per node) 3 (translations) Type of behavior kinematics The nodes of this element can support rotation but only the three translations at each node are used. If during the computation, the minimum clearance is reached, there are two cases: 1. The clearance increases. 2. The relative displacement is orthogonal to the direction of the contact (given either in input or by the element). If the length of the bar is null, the direction given by the property is used.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 191 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
The use of contact rod is recommended when some part of a structure may be brought into contact with some other part of the structure.
Tightening Beam element with two nodes, used to impose a minimum overlap between two
nodes.
Type lineic element Physical property tightening Mesh connectivity BAR Number of nodes 2 Degrees of freedom (per node) 6 (3 translations and 3 rotations) Type of behavior kinematics The relations are obtained in the following way: 1. Link the displacement of the two nodes (N1 and N2) according to the rigid body motion equations, except for the
translation in the direction N1N2. 2. Impose a minimal overlap between the two nodes in the direction N1N2 If the length of the beam is null, the direction given by the property is used. Tightening elements generate a two-steps computation: 1. Submit a tightening force, 2. Impose a minimum overlap equal to the overlap obtained in the first step.
Rigid Beam connects a node to a set of nodes in a rigid fashion.
Type beam element Physical property rigid body motion Mesh connectivity BAR Number of nodes 2 (1 master, 1 slave) Degrees of freedom (per node) 6 (3 translations and 3 rotations) Type of behavior kinematics The degrees of freedom of the master node (N1) are linked to the degrees of freedom of the slave node (N2) accord-ing to rigid-body equations. As a consequence, the displacement of the slave node depends to the rigid-body motion. Any direction can be relaxed in the rigid-body equations. If there is more that one slave node, this Rigid Beam element becomes the traditional Rigid Spider element.
Rigid Spider connects a node to a set of nodes in a rigid fashion.
Type spider element Physical property rigid body motion Mesh connectivity SPIDER Number of nodes 1 master, n-1 slaves Degrees of freedom (per node) 6 (3 translations and 3 rotations) Type of behavior kinematics The degrees of freedom of the master node (N1) are linked to the degrees of freedom of each slave node (N2 to Nn) according to rigid-body equations. As a consequence, the displacements of the slave nodes are linked among themselves according to rigid-body mo-tion. Any direction can be relaxed in the rigid-body equations. If there is only one slave node, this Rigid Spider element becomes the traditional Rigid Beam element.
Smooth Spider connects a node to a set of nodes in a smooth fashion.
Type spider element Physical property smooth body motion Mesh connectivity SPIDER Number of nodes 1 slave, n-1 masters Degrees of freedom (per node) 6 (3 translations and 3 rotations) Type of behavior kinematics The displacement of the slave node (N1) is linked to the displacement of the center of gravity of the n-1 master nodes. This linkage does not introduce any additional stiffness between the master nodes. The relations are obtained in the following way: 1. Compute the center of gravity of the master nodes using the same weight for all the nodes.
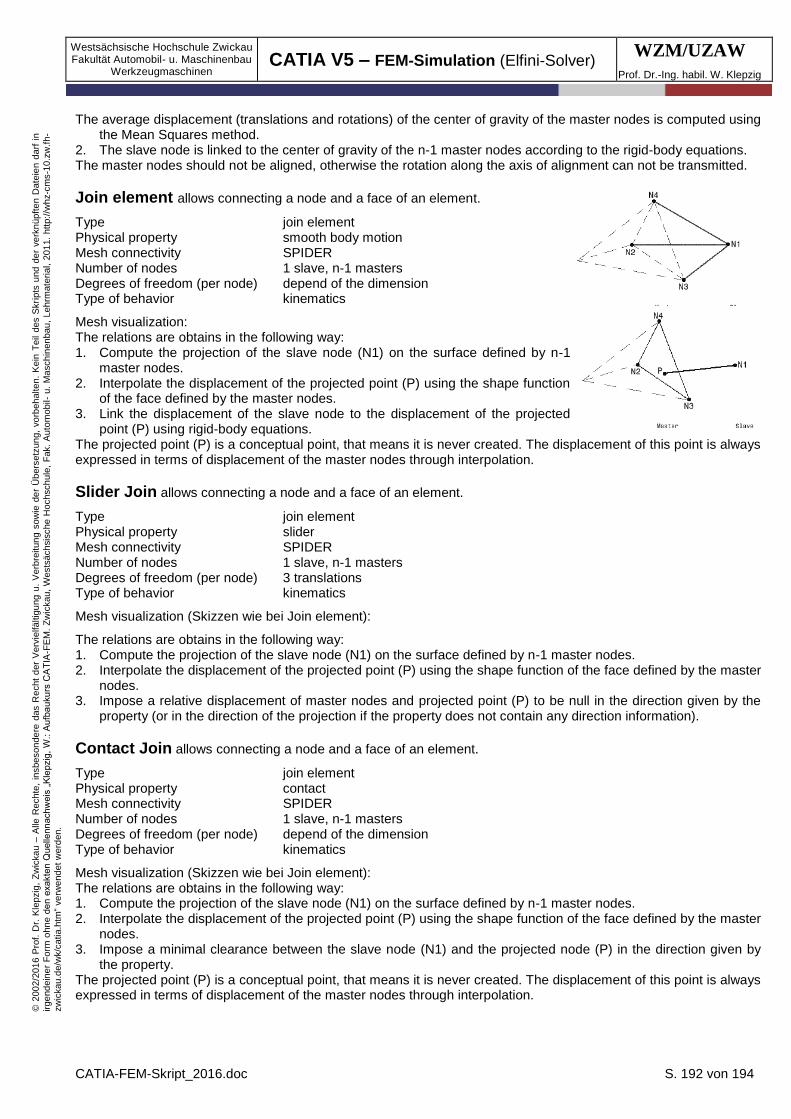
Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 192 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
The average displacement (translations and rotations) of the center of gravity of the master nodes is computed using the Mean Squares method.
2. The slave node is linked to the center of gravity of the n-1 master nodes according to the rigid-body equations. The master nodes should not be aligned, otherwise the rotation along the axis of alignment can not be transmitted.
Join element allows connecting a node and a face of an element.
Type join element Physical property smooth body motion Mesh connectivity SPIDER Number of nodes 1 slave, n-1 masters Degrees of freedom (per node) depend of the dimension Type of behavior kinematics
Mesh visualization: The relations are obtains in the following way: 1. Compute the projection of the slave node (N1) on the surface defined by n-1
master nodes. 2. Interpolate the displacement of the projected point (P) using the shape function
of the face defined by the master nodes. 3. Link the displacement of the slave node to the displacement of the projected
point (P) using rigid-body equations. The projected point (P) is a conceptual point, that means it is never created. The displacement of this point is always expressed in terms of displacement of the master nodes through interpolation.
Slider Join allows connecting a node and a face of an element.
Type join element Physical property slider Mesh connectivity SPIDER Number of nodes 1 slave, n-1 masters Degrees of freedom (per node) 3 translations Type of behavior kinematics
Mesh visualization (Skizzen wie bei Join element):
The relations are obtains in the following way: 1. Compute the projection of the slave node (N1) on the surface defined by n-1 master nodes. 2. Interpolate the displacement of the projected point (P) using the shape function of the face defined by the master
nodes. 3. Impose a relative displacement of master nodes and projected point (P) to be null in the direction given by the
property (or in the direction of the projection if the property does not contain any direction information).
Contact Join allows connecting a node and a face of an element.
Type join element Physical property contact Mesh connectivity SPIDER Number of nodes 1 slave, n-1 masters Degrees of freedom (per node) depend of the dimension Type of behavior kinematics
Mesh visualization (Skizzen wie bei Join element): The relations are obtains in the following way: 1. Compute the projection of the slave node (N1) on the surface defined by n-1 master nodes. 2. Interpolate the displacement of the projected point (P) using the shape function of the face defined by the master
nodes. 3. Impose a minimal clearance between the slave node (N1) and the projected node (P) in the direction given by
the property. The projected point (P) is a conceptual point, that means it is never created. The displacement of this point is always expressed in terms of displacement of the master nodes through interpolation.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 193 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
Tightening Join allows connecting a node and a face of an element.
Type join element Physical property tightening Mesh connectivity SPIDER Number of nodes 1 slave, n-1 masters Degrees of freedom (per node) 3 translations Type of behavior kinematics
Mesh visualization (Skizzen wie bei Join element): The relations are obtains in the following way: 1. Compute the projection of the slave node (N1) on the surface defined by n-1 master nodes. 2. Interpolate the displacement of the projected point (P) using the shape function of the face defined by the master
nodes. 3. Link the displacement of the slave node (N1) to the displacement of the projected point (P) using rigid-body
equations, except for the translation in the direction of the tightening given by the property. 4. Impose a minimum overlap in the direction given by the property between the slave node (N1) and the projected
point (P). The projected point (P) is a conceptual point, that means it is never created. The displacement of this point is always expressed in terms of displacement of the master nodes through interpolation. Tightening elements generate a two-steps computation: 1. Submit a tightening force, 2. Impose a minimum overlap equal to the overlap obtained in the first step.
Fitting Join allows connecting a node and a face of an element.
Type join element Physical property pressure fitting Mesh connectivity SPIDER Number of nodes 1 slave, n-1 masters Degrees of freedom (per node) 3 translations Type of behavior kinematics
Mesh visualization (Skizzen wie bei Join element): The relations are obtains in the following way: 1. Compute the projection of the slave node (N1) on the surface defined by n-1 master nodes. 2. Interpolate the displacement of the projected point (P) using the shape functions of the face defined by the mas-
ter nodes. 3. Link the translations normal to the direction given by the property (or direction ) according to rigid body equa-
tions. 4. Impose a minimum clearance between the slave node (N1) and the projected point (P) in the direction given by
the property. The projected point (P) is a conceptual point, that means it is never created. The displacement of this point is always expressed in terms of displacement of the master nodes through interpolation.

Westsächsische Hochschule Zwickau Fakultät Automobil- u. Maschinenbau
Werkzeugmaschinen CATIA V5 – FEM-Simulation (Elfini-Solver)
WZM/UZAW
Prof. Dr.-Ing. habil. W. Klepzig
CATIA-FEM-Skript_2016.doc S. 194 von 194
© 2
00
2/2
01
6 P
rof. D
r. K
lepzig
, Z
wic
ka
u –
Alle
Rechte
, in
sbeson
de
re d
as R
echt
der
Verv
ielfältig
ung u
. V
erb
reitun
g s
ow
ie d
er
Üb
ers
etz
un
g,
vo
rbeh
alte
n.
Kein
Teil
des S
kri
pts
und d
er
ve
rkn
üpft
en D
ate
ien d
arf
in
irge
nd
ein
er
Fo
rm o
hn
e d
en e
xakte
n Q
uelle
nn
achw
eis
„K
lepzig
, W
.: A
ufb
auku
rs C
AT
IA-F
EM
. Z
wic
kau,
Wests
ächsis
che H
ochsch
ule
, F
ak.
Auto
mobil-
u.
Ma
schin
en
bau
, Leh
rmate
rial, 2
01
1.
htt
p://w
hz-c
ms-1
0.z
w.f
h-
zw
ickau
.de/w
k/c
atia.h
tm“
ve
rwe
nd
et w
erd
en.
18 Quellennachweis
/1/ CATIA-GSA-Hilfe, *.htm bzw. estug.pdf
/2/ CATIA-AMT-Hilfe, *.htm bzw. fmsug.pdf
/3/ CATIA-PEO-Hilfe, *.htm bzw. kwoug.pdf
/4/ Koehldorfer, Werner: Finite-Elemente-Methoden mit CATIA V5 / SIMULIA. 3. Aufl. Mün-
chen, Wien: Carl Hanser, 2010 – ISBN-10: 3-446-42095-9
/5/ Woyand, Hans-Bernhard: FEM mit CATIA V5. 3. Aufl. Wilburgstetten: J. Schlembach, 2009
– ISBN 978-3-935340-64-9
/6/ Lueger, Otto (Hrsg.): Lexikon der gesamten Technik. 2. Aufl. Stuttgart, Leipzig: Deutsche
Verlagsanstalt, 1904
digitalisiert in http://www.zeno.org/Lueger-1904
/7/ Grote, K. H. (Hrsg.); Feldhusen, J. (Hrsg.): Dubbel Taschenbuch für den Maschinenbau. 22.
Aufl. Berlin, Heidelberg u. a.: Springer, 2007
/8/ Fronius, St. (Hrsg.); Tränkner, G. (Hrsg.) u. a.: Taschenbuch Maschinenbau - Grundlagen.
3. Auflage. Band 1/II. Berlin: Verlag Technik, 1975
Top Related
Copyright © 2022 FDOKUMEN

