







Bahasa
Halaman
Hukum


AbstrakCedera tulang belakang (SCI) dan nyeri pinggang (LBP) secara signifikan membatasi
aktivitas pribadi dan pekerjaan. Karena gerakan tubuh bagian atas sangat penting untuk memperluas area jangkauan tangan dan menjaga keseimbangan tubuh, kontrol yang terkoordinasi antara badan dan gerakan tangan sangat penting. Dalam studi ini, menyesuaikan pola koordinasi yang diselidiki pada SCI, LBP dan kontrol peserta dalam melakukan manual material handling sambil duduk, di mana beban dipindahkan dengan kedua tangan dari lokasi rumah menuju salah satu dari 4 target pada bidang pertengahan sagital.
kecepatan puncak badan lebih besar dan tertunda untuk SCI bila dibandingkan dengan kelompok kontrol, sedangkan kecepatan tangan puncak sebanding. Namun, kecepatan puncak tangan lebih kecil dalam LBP dibanding kelompok kontrol. Gerakan tangan umumnya mendahului gerakan tubuh untuk semua kelompok, tetapi lebih menonjol untuk SCI daripada kelompok lain. Selain itu, untuk pergerakan tubuh SCI ditahan sampai tangan yang selaras dengan tinggi target.
Hasil ini menunjukkan bahwa SCI individu telah mengembangkan pola koordinasi yang unik untuk mengimbangi kontrol keseimbangan mereka yang terbatas, meskipun strategi ini dapat mengurangi efektif ruang kerja dan kelebihan ekstremitas atas. Sebaliknya, LBPs tampaknya telah mengurangi kecepatan gerakan sedangkan pola koordinasi mereka umumnya sama dengan yang di kelompok kontrol. Relevansi untuk industri: Penelitian ini menganalisis gerakan orang dengan cedera tulang belakang atau sakit punggung bawah dalam tugas-tugas pengangkatan material secara manual. Menilai strategi disesuaikan dengan gerakan mereka akan membantu meningkatkan desain ruang kerja untuk mengakomodasi pekerja dengan kapasitas terbatas dan untuk memberikan bukti kuantitatif dan pedoman tentang efektivitas program rehabilitasi pekerjaan.
1. PengantarTrauma medulla spinalis (SCI) dan nyeri pinggang (LBP) secara signifikan membatasi melakukan kegiatan pribadi sehari2 dan pekerjaan. Untuk orang dengan SCI, hanya 37% yang beruntung dipekerjakan ulang setelah cedera ( Praemer et al, 1999. ), Dan permintaan fisik dari beberapa pekerjaan pose hambatan yang signifikan untuk kembali mereka untuk bekerja ( Yasuda et al, 2002. ). Enam puluh persen responden survei dengan SCI dilaporkan tertahan untuk kembali bekerja dengan kapasitas fisik mereka yang terbatas (Krause dan Anson, 1996 ), Terutama untuk jenis yang sama pekerjaan yang mereka memiliki sebelum cedera ( Kastil, 1994 , Levi et al, 1996. ). Demikian pula, pasien dengan menonaktifkan kronis LBP tidak mampu bekerja rata-rata selama empat minggu setelah cedera, dan 16% dari mereka tidak berhasil kembali bekerja hingga 7 bulan ( Lehmann et al., 1.993 ). Selanjutnya, pasien LBP terkena risiko lebih tinggi mendapatkan cedera punggung rendah tambahan daripada populasi kontrol, seperti LBP sering menginduksi peningkatan coactivation otot antagonis, yang pada gilirannya meningkatkan beban tulang belakang secara keseluruhan ( Marras et al, 2004. ).
Kapasitas kerja dari populasi terluka dibatasi oleh keterbatasan gerakan tubuh bagian atas dan nyeri. Misalnya, signifikan proporsi pasien LBP tidak mampu melakukan pengangkatan manual yang berasal dari elevasi rendah dari tanah dan jauh jarak dari tubuh, dan kecenderungan itu lebih jelas dengan mengangkat secara asimetri ( Ferguson et al,
2005. ). jangkauan gerak Tangan dan lengan berkurang untuk pasien SCI dan LBP ( Cox et al, 2000. ; Takala dan Viikari-Juntura, 2000 ). Gerakan tangan umumnya lambat untuk SCI daripada populasi kontrol ( Do et al., 1985 ; Reft dan Hasan, 2002 , Koshland et al, 2005. ). Pada pasien nyeri punggung bawah, goncangan postural lebih besar dan dada respon otot untuk menyeimbangkan gangguan lebih lambat dari pada populasi kontrol ( Radebold et al, 2001. ).
Namun, banyak aspek pola pergerakan tidak membedakan antara individu yang terluka dan yang tidak terluka. Untuk Misalnya, bentuk umum dari profil kecepatan dan lintasan untuk gerakan tangan bisa menjadi serupa antara SCI dan kelompok kontrol.
( Do et al, 1985. , Koshland et al, 2005. ). Gerakan tangan tidak selalu lambat bagi individu SCI, gerakan beban sebagai transfer mungkin balistik ( Chaffin et al, 2004. ).
Dalam gerakan tangan mencapai untuk tugas manual material handling, gerakan tubuh sangat penting untuk memperluas jangkauan amplop ( Bortolami et al, 2008. , Chateauroux dan Wang, 2008 ;Kim et al, 2010. ). Namun, tubuh bagian atas juga digunakan untuk meniadakan pergeseran di pusat massa menjauh dari dasar tubuh ( Massion, 1992 , Aruin dan Shiratori, 2003 ). Kedua tujuan yang berbeda dari gerakan kontrol mungkin mengharuskan batang tubuh untuk bergerak dalam dua arah yang berlawanan: dalam kasus bimanual maju mencapai, Misalnya, batang tubuh harus tertekuk untuk memperpanjang jarak jangkauan tetapi juga diperluas untuk menjaga pusat massa dalam diterima membatasi. Dalam keadaan koordinasi gerakan bertentangan memainkan peran penting. Salah satu perwakilan skema koordinasi suatu "penyesuaian postural antisipatif", di mana tubuh bagian atas adalah diaktifkan untuk menyeimbangkan postural sebelum datang Gerakan tangan onset ( Bouisset dan Zattara, 1987 , Kuo dan Zajac, 1.993 , Toussaint et al, 1997. , Stapley et al, 1998. ; Kaminski dan Simpkins, 2001 , Berrigan et al, 2006. )
Secara umum, kelompok otot tubuh seperti otot erector spinae dan latissimus dorsi terlibat dalam kontrol keseimbangan dalam manual duduk material handling gerakan ( Dickstein et al, 2004. ). Namun, untuk menyeimbangkan dukungan, SCI ( Seelen et al., 1998 , Janssen-Potten et al, 2000. ) dan LBP ( Hodges dan Richardson, 1999 ; . Silfies et al, 2005 ) pasien baik mengandalkan otot yang tidak umum digunakan dalam kontrol pop-modulasi dan / atau tidak mengaktifkan kelompok otot yang biasanya terlibat dalam populasi kontrol. Seperti perubahan otot tubuh acti-pola elevasi, akibatnya, akan menghasilkan kinematika berubah dalam gerakan-gerakan badan dan juga mempengaruhi koordinasi dengan gerakan tangan.
Selain itu, lintasan tangan lurus di koordinat Cartesian, yang dikenal sebagai ciri khas optimal dikendalikan gerakan ( Uno et al, 1989. , Wolpert et al, 1995. ), Yang hasil terkoordinasi dari beberapa segmen tubuh ( Flash dan Hogan, 1985 , Todorov dan Jordan, 2002 ). Namun, kelengkungan di jari dan lintasan gerakan bahu yang lebih besar bagi orang-
orang dengan SCI dibandingkan orang terluka ( Reft dan Hasan, 2002 ), Yang lebih lanjut mendukung hipotesis bahwa skema gerakan koordinasi secara signifikan berubah setelah cedera.
Dengan demikian tujuan penelitian ini adalah untuk menggolongkan sementara koordinasi antara batang tubuh dan tangan di SCI dan LBP mereka inilah. Itu adalah hipotesis bahwa kendala pada gerakan tubuh menginduksi perubahan adaptif dalam pola koordinasi, khususnya pada tugas manual yang membutuhkan keduanya baik jarak jangkauan diperpanjang dan menyeimbangkan perawatan. Penelitian ini menganalisis gerakan bimanual untuk mentransfer beban tangan, yang umum dilakukan pada pekerjaan pengangkatan secara manual. Dari perspektif Hasil fungsional, pemahaman koordinasi gerakan tubuh bagian atas terkait dengan keterbatasan SCI atau LBP akan membantu mengidentifikasi faktor-faktor risiko potensial untuk pekerja dengan cedera. Juga informasi yang diperoleh dapat digunakan untuk memperbaiki desain ruang kerja untuk mengakomodasi pekerja dengan kapasitas terbatas dan untuk menyediakan kuantitatif bukti dan pedoman mengenai efektivitas pendudukan-pational program rehabilitasi.
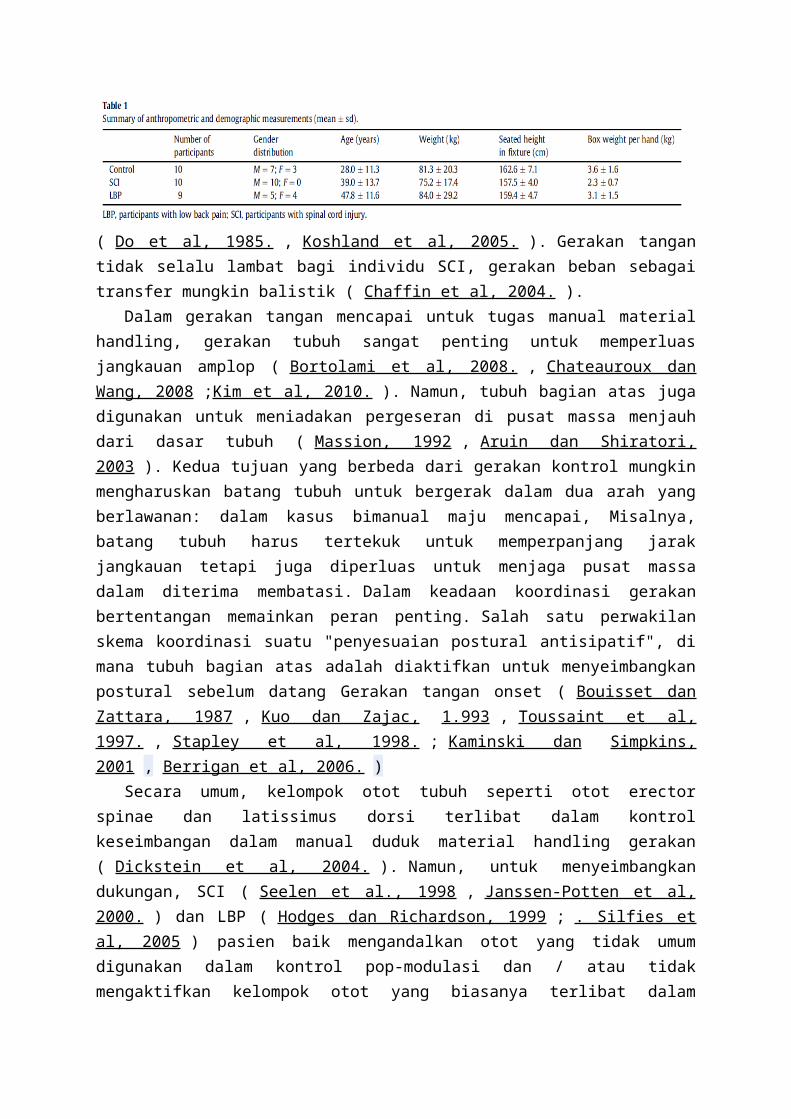
2. Metode2.1. PesertaTiga kelompok individu (SCI, LBP, dan kontrol), dua puluh sembilan secara total, berpartisipasi dalam penelitian ini sebagai relawan dibayar. antropometri dan demografis dari masing-masing kelompok terdaftar dalam Tabel 1 . Individu-individu dalam kelompok SCI memiliki toraks yang baik (T4-T12) atau tinggi lumbar (L1-L4) tingkat setara cedera American Spinal Cedera Asosiasi Penurunan Skala A (lengkap) atau B (Lengkap). Mereka telah aktif selama setidaknya satu tahun sejak mereka cedera, dengan waktu rata-rata setelah cedera dari 15,9 ± 9.1 (berarti ± sd) tahun. Pada kelompok LBP semua peserta memiliki setidaknya sejarah satu tahun sakit punggung kronis (L4-S1) rendah dan berada pada Kondisi stabil secara medis sehingga untuk berpartisipasi dalam pengujian rehabilitasi, dengan rata-rata yang waktu setelah cedera 9,7 ± 12,0 tahun. Peserta dalam kontrol Kelompok tidak memiliki riwayat gangguan ortopedi atau neurologis.
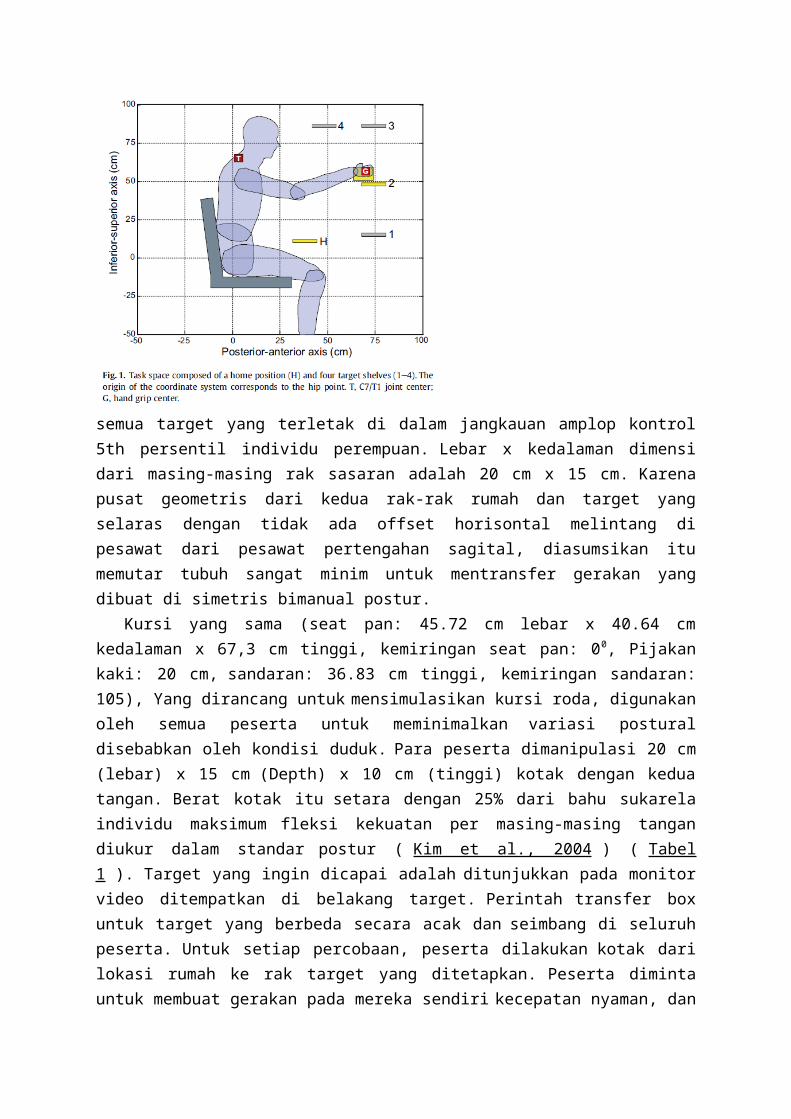
2.2. Peralatan dan protokolDalam postur duduk, para peserta secara manual pindah tangan box dari posisi rumah awal untuk salah satu dari empat rak sasaran ( Gambar. 1 ). Posisi rumah (dilambangkan oleh H rak di Gambar. 1 ) adalah terletak di ketinggian 11 cm dan 38 cm jarak radial dari pinggul titik peserta duduk. Elevasi dasar titik pinggul adalah 78 cm. Tiga sasaran ditempatkan di pesawat pertengahan sagital pada ketinggian 16 cm baik (rak 1), 49 cm (rak 2), atau 87 cm (rak 3) dari titik pinggul. Jarak horizontal ke pusat geometris dari rak sasaran adalah 74 cm. Selain itu, target lain adalah ditempatkan pada jarak dekat (48 cm, rak 4) dengan ketinggian 87 cm dari titik pinggul. Posisi rak-rak yang dipilih sehingga

semua target yang terletak di dalam jangkauan amplop kontrol 5th persentil individu perempuan. Lebar x kedalaman dimensi dari masing-masing rak sasaran adalah 20 cm x 15 cm. Karena pusat geometris dari kedua rak-rak rumah dan target yang selaras dengan tidak ada offset horisontal melintang di pesawat dari pesawat pertengahan sagital, diasumsikan itu memutar tubuh sangat minim untuk mentransfer gerakan yang dibuat di simetris bimanual postur.
Kursi yang sama (seat pan: 45.72 cm lebar x 40.64 cm kedalaman x 67,3 cm tinggi, kemiringan seat pan: 00, Pijakan kaki: 20 cm, sandaran: 36.83 cm tinggi, kemiringan sandaran: 105), Yang dirancang untuk mensimulasikan kursi roda, digunakan oleh semua peserta untuk meminimalkan variasi postural disebabkan oleh kondisi duduk. Para peserta dimanipulasi 20 cm (lebar) x 15 cm (Depth) x 10 cm (tinggi) kotak dengan kedua tangan. Berat kotak itu setara dengan 25% dari bahu sukarela individu maksimum fleksi kekuatan per masing-masing tangan diukur dalam standar postur ( Kim et al., 2004 ) ( Tabel 1 ). Target yang ingin dicapai adalah ditunjukkan pada monitor video ditempatkan di belakang target. Perintah transfer box untuk target yang berbeda secara acak dan seimbang di seluruh peserta. Untuk setiap percobaan, peserta dilakukan kotak dari lokasi rumah ke rak target yang ditetapkan. Peserta diminta untuk membuat gerakan pada mereka sendiri kecepatan nyaman, dan tidak ada presisi penempatan tertentu adalah diperlukan, namun kotak itu tetap stabil di rak setelah penempatan selesai.
Prosedur ditinjau dan disetujui oleh Universitas Michigan Ilmu Kesehatan Kelembagaan Review Board, dan semua peserta menandatangani informed consent sebelum percobaan.
2.3. Gerakan rekamanGerakan segmen tubuh bagian atas dicatat menggunakan optik (MacReflexÔ, Qualysis
Medis AB, Gothenburg, Swedia) dan elektromagnetik (Flock of BirdsÔ, Ascension Technology Corp, Menangkap gerak sistem Milton, VT). Spidol optik ditempatkan pada tangan (titik tengah dari permukaan dorsal), siku (epi-kondilus), dan bahu (proses akromion). sensor Elektromagnetik ditempatkan pada tulang dada dan punggung bawah (di atas L5/S1 sendi). tanda koordinat dan orientasi tubuh Yang diukur digunakan untuk

memperkirakan join pusat di L5/S1, C7/T1, sternoklavikularis, siku, dan bahu ( Reed et al, 1999. ). diperoleh koordinat 3D yang diproyeksikan ke bidang mid-sagittal untuk konversi ke koordinat 2D.
Gerakan tercatat pada 25 Hz frekuensi sampling, dan lintasan setiap penunjuk dihaluskan dalam proses off-line menggunakan pergeseran urutan fase nol kedua Butterworth low-pass filter dengan frekuensi cutoff 6 Hz. Awal gerakan itu ditentukan oleh ambang kecepatan tangensial tangan yang sama atau lebih besar dari 20 cm / s. Serupa dengan akhir dari gerakan dengan kecepatan tangensial kurang dari 5 cm / s. durasi Gerakan (yaitu, total Gerakan waktu) didefinisikan sebagai selisih antara awal dan akhir kali gerakan.
2.4. analisis Koordinasi gerakan Torso dan tangan yang dinyatakan oleh waktu tergantung posisi sendi C7/T1 dan
pusat cengkeraman tangan kanan yang dinotasikan dengan "T" dan "G" dalam Gambar 1 , Masing-masing. Gerakan parameter, termasuk jarak perjalanan, durasi gerakan, puncak tangensial kecepatan, dan waktu dinormalkan ke puncak kecepatan dari onset Gerakan juga diukur dari yang sesuai koordinat.
Pola koordinasi spesifik yang dihitung dengan menggunakan precedence index (PI) didefinisikan sebagai berikut. Posisi penunjuk p (C7/T1 atau pegangan tangan kanan) pada waktu t diwakili vektor dari x - (posterioreanterior) dan sumbu y (inferioresuperior) koordinat
sedangkan kecepatan sesaat penunjuk dapat ditunjukkan oleh
Dengan demikian total jarak perjalanan dari penunjuk dari waktu 0 sampai T dapat didefinisikan sebagai
di mana min D (t) dan max D (t) adalah maksimum dan minimum D (t) untuk t ˛ [0, T MT]. Secara umum, min D (t) ¼ 0 di t ¼ 0, yang membuat max D (t) sama dengan D (T MT). Kadang-kadang, bagaimanapun, peserta 'tangan berada dalam gerak sedikit sambil menyesuaikan pegangan atau postur sebelum memulai gerakan transfer utama (seperti yang ditentukan oleh ambang batas kecepatan tercantum dalam Bagian 2.3 ). Dalam kasus tersebut, min D (t) akan lebih besar dari 0 dan dengan demikian dikurangi dari D (t) dan max D (t), sebagai ditunjukkan dalam Persamaan (4) .
Kemudian didahulukan index (PI) dari tangan sehubungan dengan torso didefinisikan sebagai berikut:
dimana N tangan (t) dan N batang tubuh (t) menunjukkan jarak perjalanan dinormalisasi dari tangan dan dada pada waktu t, masing-masing.
Dari definisi di atas, PI = 0 ketika pindah tangan dan dada selaras. Jadi pada N tangan (t) vs N batang tubuh (t) diagram ( Gambar. 2 A), ini Kasus diwakili oleh diagonal dari grafik. PI A lebih besar dari 0 menunjukkan bahwa gerakan tangan mendahului gerakan tubuh, adalah diwakili oleh kurva membungkuk ke arah sudut kiri atas ( Gambar. 2 A, PI> 0), dan kelengkungan meningkat dengan PI. Sebaliknya, ketika torso mendahului tangan, PI kurang dari 0, dan diwakili oleh kurva membungkuk ke arah pojok kanan bawah ( Gambar 2. A, PI <0).
2,5. Analisis statistikStatistik bootstrap digunakan untuk menguji signifikansi berbeda-ence dalam pengukuran antara kelompok peserta. Bootstrap Statistik dikenal untuk menjadi kuat bahkan ketika asumsi distribusi kesalahan normal tidak terpenuhi ( Wehrens et al, 2000. ;Hesterberg et al, 2003. ). Secara khusus, sejumlah besar pseudo-sampel pertama kali dibangun oleh resampling data empiris dengan penggantian. Dalam penelitian ini, ukuran sampel adalah pseudo-10.000, yang digunakan untuk membangun sarana, kesalahan standar, dan interval kepercayaan 95 persentil dari parameter antar-ests. Menggunakan confidence interval, signifikansi statistik dari perbedaan antara yang terluka (SCI atau LBP) dan kelompok kontrol adalah ditentukan pada p <0,05. Prosedur khusus yang rinci dalam Lam dan Veall (2002) dan Hesterberg et al. (2003) .
3. Hasil3.1. Umum Gerakan karakteristikSebanyak 178 gerakan tercatat (68, 51, dan 59 dari kontrol, SCI, dan kelompok LBP, masing-masing). Jumlah rekaman berbeda antara kelompok enam SCI dan satu LBP peserta tidak
dapat mencapai rak paling atas. Di antara mereka, satu Peserta SCI bisa mencapai hanya rak terendah. Kontrol partisipasi celana mampu menjangkau seluruh rak.
Secara umum, jarak tangan berarti perjalanan (D tangan (TMT)) yang 77.35 ± 2,66 (mean error ± standar), 77.55 ± 3,00, 75,19 ± 2,95 cm untuk kontrol, SCI, dan kelompok LBP, masing-masing ( Tabel 2 )Tabel 2Sarana (error standar) dari parameter gerakan dari kelompok peserta yang berbeda. Parameter dengan * menunjukkan perbedaan signifikan pada p <0,05 bila dibandingkan dengan yang sesuai pengukuran dari kelompok kontrol.
jarak perjalanan rata-rata tubuh (D batang tubuh (TMT)) adalah 13,09 0,86 ±, 14.56 ± 1,01, dan 14,55 ± 1,01 cm, masing-masing. Bootstrap Statistik menunjukkan tangan yang dan dada jarak perjalanan tidak signifikan berbeda antara SCI atau LBP dan kelompok kontrol (seperti yang dijelaskan dalam Bagian 2,5 , Signifikansi statistik dalam penelitian ini ditetapkan pada p <0,05 menggunakan metode bootstrap kecuali dinyatakan sebaliknya).
Untuk kelompok SCI, tidak ada perbedaan signifikan yang ditemukan dalam berarti durasi gerakan (1,59 ± 0,05 s), tangan tangensial puncak kecepatan (103.54 ± 3.68 cm / s), atau waktu gerakan dinormalisasi (NMT) ke puncak kecepatan tangan tangensial (31 ± 2%), jika dibandingkan kepada mereka untuk kelompok kontrol (1,47 ± 0,04 s, 102,90 ± 2,87 cm/s,28 ± 1%, masing-masing). Namun, kecepatan puncak tubuh lebih besar untuk SCI (24.93 ± 2,49 cm / s) daripada kelompok kontrol (18,27 ± 0,94 cm/s), dan dada kecepatan puncak muncul di lain waktu dalam gerakan untuk SCI (65 ± NMT 3%) dibandingkan dengan kelompok kontrol (52 ± NMT 3%). Ketika tangan mencapai kecepatan puncak, jarak bahu-ke-tangan lebih besar untuk SCI (42.12 ± 1,27 cm) dibandingkan dengan kelompok kontrol (38,73 ± 1,04 cm).
Ketika LBP dan kelompok kontrol dibandingkan, puncak kecepatan tangensial dari tangan secara signifikan lebih kecil untuk LBP (92,95 ± 2,80 cm / s) dibandingkan kontrol (102,90 ± 2,87 cm / s), namun kecepatan torso tidak berbeda nyata (17.76 ± 1,07 cm / s dalam LBP vs 18,27 ± 0,94 cm / s di kontrol). Demikian pula, baik berbeda-ence di NMT hingga kecepatan puncak batang tubuh (52 ± 3% vs 52% ± 3) atau tangan (30 ± 1% vs 28% ± 1) maupun perbedaan bahu-tangan untuk- jarak pada kecepatan puncak tangan (40.50 ± 1,13 cm vs 38,73 ± 1,04 cm) adalah signifikan.
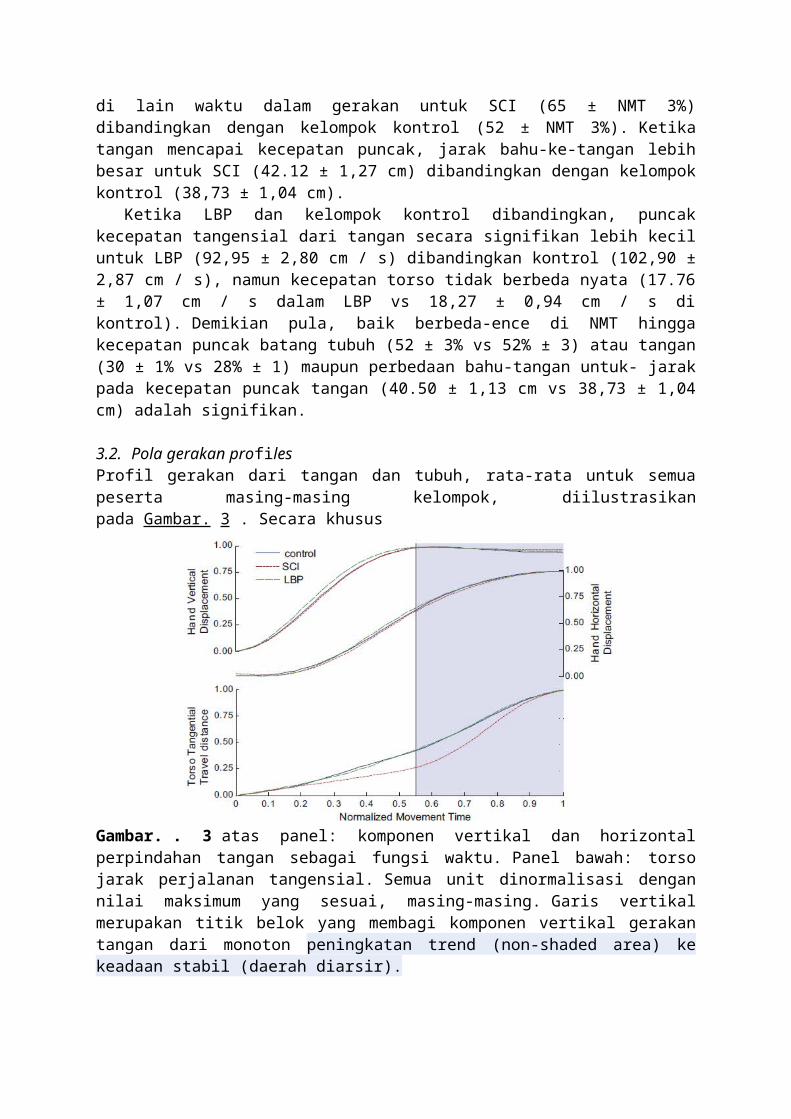
3.2. Pola gerakan profilesProfil gerakan dari tangan dan tubuh, rata-rata untuk semua peserta masing-masing kelompok, diilustrasikan pada Gambar. 3 . Secara khusus

Gambar. . 3 atas panel: komponen vertikal dan horizontal perpindahan tangan sebagai fungsi waktu. Panel bawah: torso jarak perjalanan tangensial. Semua unit dinormalisasi dengan nilai maksimum yang sesuai, masing-masing. Garis vertikal merupakan titik belok yang membagi komponen vertikal gerakan tangan dari monoton peningkatan trend (non-shaded area) ke keadaan stabil (daerah diarsir).
panel atas menunjukkan perpindahan dinormalisasi dari tangan dalam arah vertikal dan horisontal, masing-masing. Itu Panel bawah menunjukkan perpindahan perjalanan dinormalisasi dari torso. Berbeda dengan tangan, batang tubuh jarak perjalanan tidak dianalisis secara terpisah untuk komponen horisontal dan vertikal, seperti batang tubuh adalah dimodelkan sebagai link berputar tentang revolute joint tunggal pada L5/S1.
Secara umum untuk semua kelompok peserta, pemindahan tangan menunjukkan komponen horisontal monoton meningkat selama seluruh Gerakan durasi sebelum mencapai dataran tinggi. Namun, komponen vertikal lebih menonjol selama fase awal, yang sesuai dengan waktu 55% gerakan pertama dinormalisasi (Diwakili oleh garis vertikal di Gambar. 3 ).
Sementara pemindahan tangan menunjukkan pola yang sama untuk semua partic-kelompok ipant, torso jarak perjalanan menunjukkan pola khusus untuk SCI, bila dibandingkan dengan peserta kontrol dan LBP. Untuk kontrol dan kelompok LBP, khususnya, jarak perjalanan torso profil Bukti monoton meningkatkan profil sebelum mencapai dataran tinggi, yang lebih erat berkorelasi terhadap horizontal (R ¼ ± 0.936 0,040) dibandingkan vertikal (r ¼ ± 0,725 0,106) tangan perpindahan. Untuk kelompok SCI, namun, gerakan tubuh menunjukkan titik infleksi yang berbeda, sebelum yang gerakan tubuh yang lambat untuk kelompok ini dibandingkan dengan kelompok lain. Setelah batang tubuh mulai mempercepat untuk "kompensasi" untuk lag. Titik infleksi bertepatan dengan transisi dari komponen vertikal tangan dari monoton naik ke dataran keadaan konstan stabil.
3.3. Tangan-torso koordinasiHandetorso diagram jarak perjalanan untuk kelompok yang berbeda diilustrasikan dalam Gambar. 2 Bed. Secara umum untuk semua peserta, kurva yang membungkuk ke arah sudut kiri atas, yang menunjukkan bahwa gerakan tangan umumnya mendahului gerakan tubuh. Selain itu, kelengkungan akan lebih parah (membungkuk lebih ke arah kiri atas sudut) untuk SCI ( Gambar. 2 C) dari kontrol ( Gambar. 2 B) dan LBP ( Gambar. 2 D) kelompok. Untuk kelompok mantan, batang tubuh bergerak sekitar kurang dari 10% dari total jarak tempuh perjalanan sementara tangan
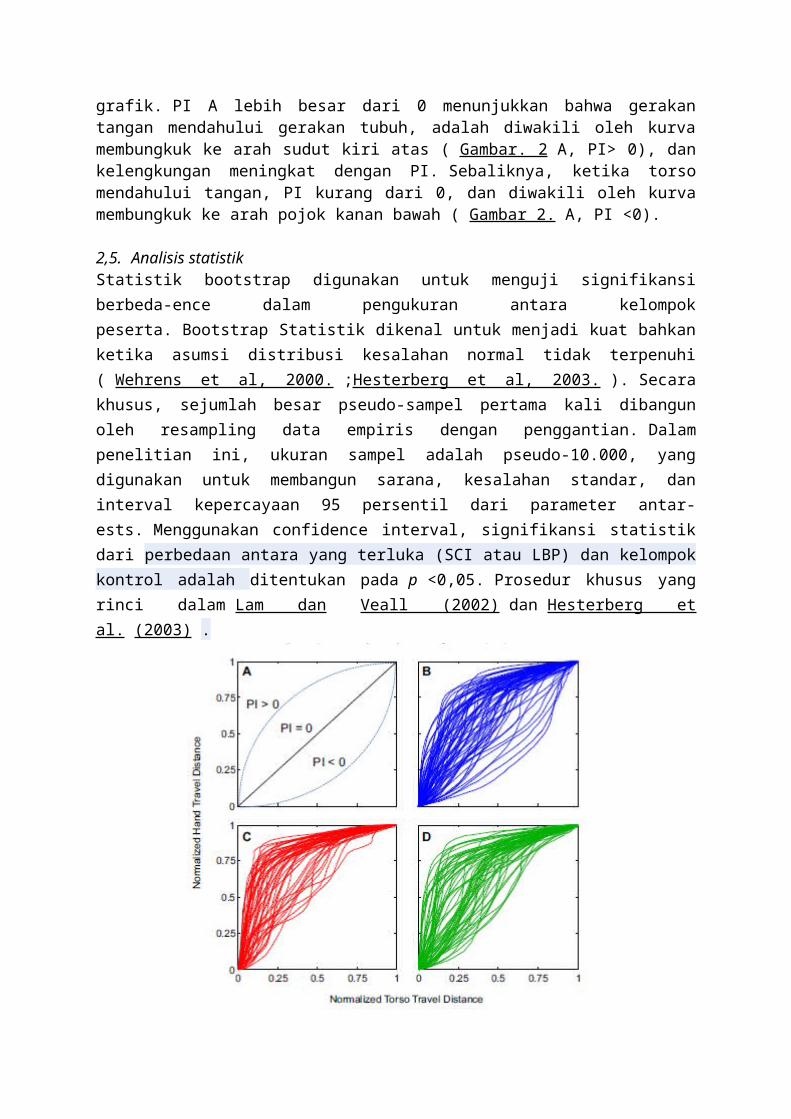
berlangsung sekitar 50% dari perjalanan nya. Selama periode yang sama, bagaimanapun kontrol dan LBP peserta menggerakkan badan mereka sekitar 20-40% dari total beratnya yang sesuai. Pola kelengkungan untuk setiap kelompok tersebut kemudian dihitung oleh yang bersangkutan PI, yang dalam perjanjian dengan observasi tions di atas. Secara khusus, itu berarti PI adalah 0.140 Æ 0,095,0,225 Æ 0,073, dan 0,162 Æ 0,082 untuk kontrol, SCI, dan LBP kelompok, masing-masing ( Tabel 3 ). PI secara signifikan lebih besar untuk SCI daripada kelompok kontrol, namun perbedaan antaraLBP dan kontrol tidak signifikan. Ketika rak target adalah dianggap secara individual, PI lebih besar untuk SCI dibandingkan kontrol kelompok untuk semua empat target. Selain itu, PI cenderung lebih besar untuk jauh (rak 1, 2, dan 3) daripada dekat (rak 4) target. Untuk kelompok LBP, rak hanya 4 dikaitkan dengan PI secara signifikan lebih besar dibandingkan dengan pada kelompok kontrol. Juga PI cenderung lebih besar untuk rak 2 dan 3 dari rak 1 dan 4.4. DiskusiSimulasi kegiatan yang biasa dilakukan dalam kerja konteks, seperti dalam penanganan material manual, diperbolehkan membedakan handetorso koordinasi antara pola SCI, LBP, dan kontrol kelompok. Tampak bahwa pola gerakan tubuh dan tangan diamati pada kelompok partisipan yang berbeda dapat menunjukkan hasil kembali cedera dan adaptasi gerakan konsekuen. Sebuah topik tertentu-Beberapa ipants, khususnya satu LBP dan enam SCI individu, tidak dapat mencapai target teratas. Susunan target saat ini
Menunjukkan perbedaan yang signifikan (p <0,05) dibandingkan dengan kelompok kontrol.
konfigurasi percobaan dibangun dan diuji untuk mengakomodasi setidaknya 5th persentil perempuan dari populasi kontrol. Namun, anthropometry peserta kami adalah dalam kisaran dari persentil ke-5 perempuan hingga pria persentil ke-95 ketika seseorang duduk ketinggian dan panjang lengan dibandingkan dengan antropometri suatu database ( Gordon et al, 1989. ). Dengan demikian diasumsikan bahwa terbatas mencapai kemampuan pada orang peserta yang lebih terkait dengan mereka spesifik cacat kondisi dibandingkan antropometri mereka.4.1. Koordinasi dalam kelompok SCIStudi ini menunjukkan bahwa parameter yang terkait dengan gerakan tangan sebanding antara SCI dan kelompok kontrol. Secara khusus, durasi kecepatan pergerakan, tangensial puncak dan NMT dengan kecepatan puncak tangan yang sama untuk beban pengguna mentransfer tugas simulasi dalam penelitian ini. Studi terdahulu namun kembali porting tangan lambat puncak kecepatan dan durasi gerakan lebih lama untuk (SCI Lakukan et al, 1985. , Reft dan Hasan, 2002 ; . Koshland et al, 2.005 ). Perbedaan ini mungkin dikarenakan tugas tertentu persyaratan penelitian ini. Peserta diminta untuk bergerak, tanpa kendala ketat

pada presisi, beban genggam pada diri memilih kecepatan yang nyaman untuk rak sasaran relatif besar (20 cm lebar 15 cm  mendalam, yang kurang lebih sama Permukaan ukuran sebagai kotak genggam). Dengan kendala minimal hal akurasi atau kecepatan-ketepatan tradeoff, yang berpotensi melakukan tidak menghukum peserta SCI, kecepatan gerakan tangan mirip untuk kelompok SCI dan kontrol dalam konteks kekinian. Oleh karena itu iniHasilnya menunjukkan bahwa self-paced gerakan tangan yang tidak tentu memperlambat dalam kelompok SCI. Bahkan jika gerakan tangan mungkin meningkatkan gaya reaksi dan momen yang dinamis, ada kemungkinan bahwa kompensasi, berpotensi dalam pola koordinasi, dibuat untuk mencapai kecepatan gerakan tangan dibandingkan dengan menggunakan terbatas mengontrol gerakan-gerakan tubuh. Memang, batang tubuh parameter gerakan dan koordinasi handetorso menunjukkan perbedaan yang signifikan antara kelompok. Kecepatan puncak batang tubuh lebih besar untuk SCI, namun muncul dalam tahap akhir dari gerakan. Jadi dalam konteks penelitian ini, pola pergerakan karakteristik kelompok SCI lebih dibedakan dalam tubuh dibandingkan gerakan tangan.
Pembedaan ini lebih jauh didukung oleh PI, yang mengkuantifikasi koordinasi handetorso. Gerakan tangan didahulukan atas gerakan tubuh secara signifikan lebih besar untuk SCI dibanding kontrol individu. Namun PI sebanding antara LBP dan kelompok kontrol. Sekali lagi, perbedaan dalam PI dapat dikaitkan dengan strategi unik pergerakan SCI untuk mengkompensasi terbatas pengendalian gerakan tubuh. Seperti yang diilustrasikan pada Gambar. 3 , Yang LBP dan kelompok kontrol menunjukkan gerakan tubuh selaras dengan horisontal komponen gerakan tangan, yang menunjukkan monoto-nous perpindahan. Dengan demikian, dalam peserta LBP dan kontrol, torso kontribusi untuk menyerahkan mencapai dengan menghasilkan gerakan di sama arah dengan tangan sepanjang perjalanan seluruh gerakan, setidaknya di tingkat Kinematika. Namun untuk SCI, profil torso gerakan menyajikan titik infleksi khas, yang bertepatan dengan satu dalam komponen vertikal tangan gerakan. Batang tubuh tertinggal tangan terutama pada awal fase sampai tangan mencapai tingkat tertinggi vertikal elevasi-tion. Kemudian batang tubuh untuk membantu mempercepat tangan bergerak dekat dengan target.
Dalam tujuan-diarahkan gerakan seperti dalam penanganan material manual atau meraih sebuah objek, kontrol gerakan harus memenuhi dua gol bersamaan: yang pertama adalah untuk memindahkan tangan untuk target, dan kedua adalah untuk menjaga keseimbangan tubuh selama gangguan dibuat oleh gerakan tangan ( Bouisset dan Zattara, 1987 , Hodges et al,. 1.999 , Robert et al, 2007. ). Pada kelompok kontrol dan LBP, bahkan jika Keseimbangan bisa terganggu oleh gerakan tangan, batang tubuh utama mover, seperti erector spinae dan otot miring, bisa diaktifkan untuk menjaga tubuh bagian atas dalam posisi yang stabil yang diinginkan. Namun kelompok SCI menunjukkan batang tubuh membelah strategi bergerak-ments menjadi dua fase yang berbeda. Selama fase pertama adalah batang tubuh disimpan dalam posisi statis tegak atau bergerak perlahan, paling sering dalam arah ekstensi (berlawanan dengan gerakan tangan Directortion). Strategi ini efektif mengkompensasi untuk maju perpindahan pusat massa yang dikenakan oleh gerakan tangan ( Hodges et al, 1999. , Janssen-Potten et al, 2000. ). Selama kedua fase, flexes batang tubuh dalam arah gerakan tangan. Ini akan membantu untuk memperpanjang jarak jangkauan dan mencegah overstretching bagian atas kaki, yang akan lebih meningkat bahu loading. Hasil ini juga sejalan dengan penelitian sebelumnya di mana kelompok SCI memiliki pola pergerakan
karakteristik Menampilkan batang tubuh bergerak menjauh dari target dalam fase awal gerakan ( Kim et al., 2010 ).
Namun, selama fase kedua, keseimbangan mungkin COMPRO-mised bagi individu SCI, yang tidak memiliki kapasitas yang cukup atau kemungkinan untuk kontrak otot torso. Dengan demikian diasumsikan bahwa "Sukarela" kehilangan keseimbangan dalam fase ini muncul hanya dengan antisipasi stabilisasi masa depan tubuh, mungkin didasarkan pada keberhasilan diperkirakan mendarat beban ke rak target dan menggunakannya untuk dukungan ( Kim et al., 2010 ). Antisipasi tersebut paling mungkin didasarkan pada representasi internal tubuh ( Mouchnino et al, 1992. , Massion, 1994 ) Didirikan oleh belajar meskipun sebelumnya pengalaman. Sebuah jenis sebanding antisipasi juga diamati pada bimanual kegiatan, di mana satu gerakan tangan adalah skala untuk menghindari melayang dari sisi lain sambil menunggu ketersediaan visual yang bimbingan ( Srinivasan dan Martin, 2010 , 2.012 ). Di sini, sebuah badan Gerakan ini dimulai ketika tangan mencapai tingkat tertentu vertikal tinggi selama gerakan untuk menghindari tidak terkendali insta-bility sampai mendarat sukses pada target diantisipasi. Dalam addi-tion, perlu dicatat bahwa jenis gerakan tubuh, yang juga dikenal sebagai "penyesuaian postural antisipatif" ( Cordo dan Nashner, 1.982 , Stapley et al, 1998. , Kaminski dan Simpkins, 2001 ; Berrigan et al, 2006. ), lebih jelas terlihat pada tingkat kinematik untuk SCI dibandingkan LBP dan kelompok kontrol.
Dengan demikian, hasil dari penelitian ini mengarah untuk menunjukkan bahwa tubuh bagian atas gerakan dapat dibantu secara efisien dengan menyeimbangkan dukungan untuk pekerja dengan SCI. Hal ini dapat dicapai dengan memanfaatkan tubuh bagian atas dan / atau pegangan. Sebaiknya, tugas harus juga didesain ulang sehingga bahwa tugas materi penanganan manual keseluruhan dapat dilakukan dengan hanya satu tangan sementara grip sisi lain pegangan untuk postural mendukung. Target harus ditempatkan di dekat atau di lowketinggian, seperti yang ditunjukkan oleh PI lebih kecil yang untuk rak sasaran 1 dan 4 daripada rak lainnya. Karena gerakan individu SCI mengandalkan pada pengimbangan diantisipasi dari rak target, Upaya akomodasi ruang kerja harus mencakup perusahaan menginstal dan rak baik terlihat. Kembali dukungan yang memadai di tempat duduk ( Pottenet al, 1999. ) Sangat penting untuk menahan / mendukung langkah-tubuh mundur ments dalam tahap awal gerakan. Selain itu, harus diperhitungkan bahwa SCI fungsional (dinamis) jangkauan batas-batas yang lebih kecil daripada yang diukur dalam kondisi statis sebagian karena keterbatasan dalam keseimbangan tubuh bagian atas ( Janssen- Potten et al, 2000. ). Strategi koordinasi unik dari kelompok SCI dikaitkan dengan faktor risiko tambahan dalam pekerjaan manual: khusus, main-taining mundur torso sementara tangan bergerak maju akan mengakibatkan peningkatan tangan-ke-badan jarak dan waktu diperpanjang lengan di bahu dan siku. Seperti diamati, bahu-ke-tangan jarak pada saat kecepatan tangan puncak secara signifikan besar di SCI daripada kelompok kontrol. Dengan demikian meningkat saat dinamis berpotensi mengekspos bahu dan siku ke ditinggikan risiko cedera muskuloskeletal sekunder. Seperti risiko harus dimonitor terutama yang berkaitan dengan bahu dan gejala ekstremitas atas. 4.2. Koordinasi dalam kelompok LBPPada kelompok LBP, gerakan tangan menunjukkan kecepatan puncak lebih kecil dan jangka waktu gerakan keseluruhan lebih lama, yang berbeda dengan orang-orang dari kelompok

SCI. Namun gerakan, lain parameter-ters kelompok LBP, termasuk kecepatan puncak tubuh, waktu di tubuh kecepatan puncak, waktu pada kecepatan puncak tangan, dan dada dan tanganprofil gerakan juga, tidak menunjukkan perbedaan yang signifikan dari orang-orang dari kelompok kontrol. Oleh karena itu, adalah mungkin bahwa itu LBP torso dan kecepatan pergerakan profil setara dengan yang ada di kontrol mungkin telah dicapai dengan mengorbankan tangan lambat kecepatan pergerakan. Hasil yang sama juga dilaporkan untuk lumbar tulang belakang dan pinggul sendi LBP pasien, yang puncak kecepatan cenderung lebih kecil sedangkan tangan yang membuat gerakan cepat jangkauan ( Thomas et al, 2008. ). Kecepatan tangan lambat dapat dijelaskan dengan nyeri atau takut nyeri ( Thomas et al, 2008. , Kim et al, 2010. ). Hasil ini menunjukkan bahwa kecepatan gerakan tangan dan pengulangan Tingkat juga harus diperhitungkan ketika faktor risiko yang dinilai untuk pekerja dengan LBP. Perlu dicatat bahwa langkah-pemerintah dan profil s PI, yang tampaknya sama antara LBP dan kontrol, tidak dapat ditafsirkan dengan cara yang gerakan Kemampuan tidak berkurang dalam kelompok LBP. Seperti dibahas di atas, PI dibandingkan yang dari kelompok LBP mungkin berpotensi terkait dengan kecepatan tangan gerakan lambat, sehingga koordinasi keseluruhan pola dapat menunjukkan sebaliknya jika peserta diminta untuk pindah dengan cepat. Juga fisiologis dan persepsi biaya gerakan yang lebih tinggi dalam LBP karena sakit atau takut nyeri, yang orang lanjut pengaruh terluka 'kapasitas kerja ( Kim et al, 2003. ).4.3. KesimpulanStudi terdahulu telah melaporkan perubahan signifikan di tangan dan dada Gerakan amplitudo dan rentang gerak untuk kedua SCI dan LBP, seperti yang ditunjukkan dalam Pengantar bagian. Secara keseluruhan, penelitian ini mendukung hipotesis bahwa tangan dan gerakan tubuh menunjukkan disesuaikan pola koordinasi pada populasi dengan cedera. Secara keseluruhan, disarankan agar pola koordinasi sementara, di sejalan dengan pengukuran yang berbeda dan indeks lainnya seperti rentang gerak, amplitudo gerakan dan parameter dinamis ( Marras et al, 1999. ), dapat secara efektif digunakan untuk menilai beratnya cedera, kemajuan rehabilitasi dan pengukuran kapasitas kerja.
Copyright © 2022 FDOKUMEN

