VISVESVARAYA TECHNOLOGICAL UNIVERSITY BELAGAVI ...
80
VISVESVARAYA TECHNOLOGICAL UNIVERSITY BELAGAVI-590010 A PROJECT REPORT ON “SEARCHING AND RETRIEVAL OF IMAGES USING DESCRIPTORS AND DISTANCE MEASURE” Submitted in partial fulfillment of the requirements for the award of the degree of Master of Technology In Software Engineering 2014-15 Submitted by: SUBATHRA MUTHURAMAN (1NH13SSE17) Under the Guidance of Mrs.Swathi Baswaraju Asst. Prof, Dept.of ISE, NHCE Department of Information Science and Engineering New Horizon College of Engineering Outer ring road, Kadubeesanahalli, Near Marathahalli, Bengaluru-590010
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of VISVESVARAYA TECHNOLOGICAL UNIVERSITY BELAGAVI ...

VISVESVARAYA TECHNOLOGICAL UNIVERSITY
BELAGAVI-590010
A PROJECT REPORT ON
“SEARCHING AND RETRIEVAL OF IMAGES USING
DESCRIPTORS AND DISTANCE MEASURE”
Submitted in partial fulfillment of the requirements for the award of the degree of
Master of Technology
In
Software Engineering
2014-15
Submitted by:
SUBATHRA MUTHURAMAN (1NH13SSE17)
Under the Guidance of
Mrs.Swathi Baswaraju Asst. Prof, Dept.of ISE, NHCE
Department of Information Science and Engineering
New Horizon College of Engineering
Outer ring road, Kadubeesanahalli, Near Marathahalli, Bengaluru-590010
NEW HORIZON COLLEGE OF ENGINEERING(ISO-9001:2000 certified, Accredited by NBA,
Permanently affiliated to VTU)Outer ring road, Kadub eesanahalli, Near Marathahalli, B engaluru-s 60 1 03
DEPARTMENT OF INFORMATION SCIENCE ANDENGINEERING
NHCE,- | ru punsurr or exceuruqE l5r.
CERTIFICATE
Certified that the project work entitled "SEARCHING AND RETRIEVAL OFIMAGES USING DESCRIPTORS AND DISTANCE MEASURE" is a bonafide
work carried out by SUBATHRA MUTHURAMAN, with USN:1NH13SSEL7, rn
partial fulfillment for the award of Master Of Technology in Software Engineering ofthe Visvesvarilya Technological University, Belagavi during the year 2014-2015. It rscertified that all corrections/suggestions indicated for internal assessment have been
incorporated in the repoft deposited in the department library. The project report has
been approved as it satisfies the academic requirements in respect of Project workprescribed for the said degree.
\\9"r-Sighature of Guide
(Mrs.Swathi Baswaraju)
\L<*",SignatufofuOO
(Dr.Ajeet A.C) (Dr.Manjunatha)
External Viva
Name of Examiner
1.
2.
Signature with date

DECLARATION
I, SUBATHRA UIUTHURAMAN (USN:1NH13SSE17) , student of 4th semester
M.tech in Software Engineering, New Horizon College of Engineering, Bengaluru, hereby
declare that the project entitled "searching and Retrieval of images using Descriptors and
Distance measure" submitted to the Visvesvaraya Technological University during the
academic year 2014-2015,is a record of an original work done by me under the guidance ofMrs.Swathi Baswaraju, Assistant Professor, Department of Information Science and
Engineering, New Horizon College of Engineering, Bengaluru. This project work issubmitted in partial fulfilment of the requirements f,or the award of the degree of Master ofTechnology in Software Engineering. The results embodied in this thesis have not been
submitted to any other university or institute for the award of any degree.
"Cuirr*f"o [-fuffi rcrn4ct]^,
Date: O.j,,95" Jot.f
Place: Bengaluru
SUBATHRA MUTHURAMAN
(1NH13SSE17)

ACKNOWLEDGEMENT
Any project is a task of great enormity and it cannot be accomplished by an individual
without support and guidance. I am grateful to a number of individuals whose professional
guidance and encouragement has made this project completion a reality.
I have a great pleasure in expressing my deep sense of gratitude to the Chairman
Mr. Mohan Manghnani for having provided me with a great infrastructure and well
furnished labs.
I take this opportunity to express my profound gratitude to the Principal
Dr.Manjunatha, New Horizon College of engineering, Bengaluru for his constant support
and management.
I am grateful to Dr.Ajeet A.C, Professor and Head of Department, Department of
Information Science and Engineering, New Horizon College of Engineering, Bengaluru for
his strong enforcement on perfection and quality during the course of my project work.
I would like to express my thanks to Mrs.Swathi Baswaraju, Assistant Professor,
Department of Information Science and Engineering, New Horizon College of
Engineering, Bengaluru who has always guided me in detailed technical aspects throughout
my project.
I would like to express my thanks to the coordinators Mr.Lokesh M.R,Senior
Assistant Professor, Department of Information Science and Engineering and
Ms.Nandhini.N , Jr.Assistant Professor, Department of Information Science and
Engineering, New Horizon College of Engineering, Bengaluru for their valuable suggestions
throughout my project.
I would like to mention special thanks to all the Teaching and Non-Teaching staff
members of Information Science and Engineering department, New Horizon College of
Engineering, Bengaluru for their invaluable support and guidance.
Subathra Muthuraman (1NH13SSE17)

ABSTRACT
With explosive growth in social and multimedia, huge quantities of images are
available in web. These images are very good source of information in order to collect data
and make good use of it, if there is a good image retrieval system. The images that are
searched and retrieved are available with different visual and semantic content. The proposed
system targets to cater the growing need for an efficient image searching and retrieval system
for social/web media industry. The proposed system aims at using spatial context information
along with local features to improve the accuracy of searching and retrieving near matching
images. Spatial context information relates the object of interest with surrounding objects.
This spatial context information is converted in to binary codes which are used to perform
geometric verification between images. In the proposed method, interest points are identified
in the image using Hessian affine detector. Speeded up Robust Feature and Scale Invariant
Feature Transform descriptors are used to detect, describe the interest points in the image in
order to improve the accuracy of the retrieval system.
i

Contents
Page no.s
Abstract i
Contents ii
List of Figures iv
List of Tables v
List of Graphs vi
Chapters Titles Page no.s
Chapter 1 INTRODUCTION 1-4
1.1 Image Retrieval 1
1.2 Existing system 2
1.3 Objective of the project 2
1.4 Proposed system 2
1.5 Applications of CBIR 3
1.6 Dissertation Organisation
3
Chapter 2 LITERATURE SURVEY ON IMAGE RETRIEVAL 5-11
2.1 Literature Review
5
Chapter 3 ARCHITECTURE OF CBIR SYSTEM 12-17
3.1 Requirement Analysis and Specification 12
3.2 Architecture of the proposed system 15
3.3 Workflow of the system
16
Chapter 4 LOW LEVEL DESIGN 18-21
4.1 Class diagram 18
4.2 Use-case Diagram 19
4.3 Sequence Diagram
ii
20

Chapters Titles Page no.s
Chapter 5 IMPLEMENTATION 22-27
5.1 Tool used for implementation 22
5.2 Platform used for implementation 22
5.3 Module Implementation 23
5.3.1 Pre Processing 23
5.3.2 Query Processing Module 23
5.3.3 Feature Similarity Matching and Retrieval
27
Chapter 6 TESTING 28-30
6.1 Unit Testing 28
6.2 Integration Testing 29
6.3 System Testing
30
Chapter 7
Chapter 8
RESULTS AND DISCUSSION
CONCLUSION AND FUTURE WORK
31-38
39
REFERENCES
APPENDIX A
APPENDIX B
APPENDIX C
40-42
43-44
45-53
54-70
iii

List of Figures Page no.s
Fig 1.1 Concept of CBIR system 3
Fig 2.1 Approaches in CBIR system 5
Fig 3.1 Architecture of the proposed CBIR system 15
Fig 3.2 Work Flow Diagram of CBIR system 16
Fig 4.1 Class Diagram 18
Fig 4.2 Use-Case Diagram 19
Fig 4.3 Sequence Diagram 20
Fig 5.1 Scale Space Extrema Detection 24
Fig 5.2 Orientation Assignment 25
Fig 5.3 Keypoint Descriptor 26
Fig 7.1 Dataset used for the proposed system 31
Fig 7.2 Different categories of images used for the proposed system 32
Fig 7.3 Retrieved list of images 36
Fig B.1 Main Screen 45
Fig B.2 Dataset images 46
Fig B.3 Detected interest points 47
Fig B.4 Combined features 48
Fig B.5 Hessian detector points 49
Fig B.6 SIFT descriptor points 50
Fig B.7 SURF descriptor points 51
Fig B.8 Spatial context information-Hessian points 52
Fig B.9 Spatial context information-SIFT points 52
Fig B.10 Spatial context information-SURF points 53
Fig B.11 Result display 53

List of Tables Page no.s
Table 6.1 Unit Testing Table 28
Table 6.2 Integration Testing Table 29
Table 6.3 System Testing Table 30
Table 7.1 Precision and Recall for each category 35
Table 7.2 Mean Average Precision and Recall 37
v

List of Graphs Page no.s
Graph 7.1 Precision and Recall for each category 35
Graph 7.2 Mean Average Precision and Recall 37
vi

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 1
CHAPTER 1
INTRODUCTION
With explosive growth in social and multimedia, huge quantities of images are
available in web. These images are very good source of information in order to collect data
and make good use of it, if there is good image retrieval system. The images that are searched
and retrieved are available with different visual and semantic content. This thesis is focussed
on developing efficient methods to find similar images which will be used in many fields like
social media, medical field, etc.
1.1 Image Retrieval
Image retrieval refers to finding and retrieving images from a large database of digital
images. Development of efficient image retrieval techniques would increase the utilization of
such data. Presently, images are retrieved by using Text descriptors and only a few depends on
Content Based Image Retrieval (CBIR), which searches and retrieves digital images from a
huge database, where content, refers to the color, texture and shape of the images [20].
Content Based Image Retrieval is preferred as the images annotated by humans manually by
entering keywords take more time. Content Based Image Retrieval employs different kinds of
query techniques such as Semantic Retrieval, Relevance feedback, Query by example,
Querying by image region, Querying by visual sketch etc. This thesis is focused on the
technique “Query by example” where the image retrieval system accepts an image as an input
and retrieves the similar images based on the comparison of features.
There are some challenging issues in content based image retrieval during the
similarity matching such as distance functions, semantic gap, and goal of users. Many
distance functions are available. Out of which the one that characterizes the underlying visual
similarity between the images has to be chosen. The gap between the image semantics and
the low-level features has to be bridged in image retrieval process. The goal of the user has to
be targeted effectively.

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 2
1.2 Existing System
Most of the approaches in image retrieval depend on the BOV model. BOV method
relies on quantifying the features extracted from images and indexing it using an inverted file
structure. But in some cases BOV method fails due to the error in quantization. These kinds
of problems will decrease the retrieval precision and recall due to the distinct features being
quantized to the similar visual word. This quantization may cause many false local matches
between images. It’s time complexity is also more.
1.3 Objective of the project
Now-a-days more and more images are available in web which can be retrieved by
efficient retrieval techniques. This thesis is focussed on searching and retrieving relevant
images from a huge database based on the interest points. It takes the spatial context
information along with the local features to increase the accuracy of image retrieval. Hessian
affine region detector is used to detect the interest points, corner, from the images. Scale
Invariant Feature Transform and Speeded up Robust Feature descriptors are used to extract
and describe the interest points from the images. The descriptors feature vectors extracted are
converted into binary codes. Geometric verification can be carried out by comparing the
binary codes. Indexing is done on the images in order to retrieve it from a huge database.
Indexing makes easier to find relevant images without having to search every image in the
database.
1.4 Proposed System
The proposed image retrieval system is capable of identifying similar images in the
database with high accuracy as it combines the spatial context information along with the
local features.
Hessian affine detector is used to detect the corner points in the images. Scale
Invariant Feature Transform (SIFT) and Speeded Up Robust Feature (SURF) descriptors are
used to detect and describe the interest points in the images. Combination of the descriptors
and detector will increase the retrieval rate.

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 3
The concept of proposed image retrieval system is as follows:
Figure 1.1: Proposed CBIR System
1.5 Applications of CBIR
Many possible applications for CBIR technology have been identified. Some of the areas are:
Crime prevention,
The military,
Fashion designing,
Journalism,
Medical diagnosis, and
Web searching.
1.6 Dissertation Organisation
The rest of this dissertation research is organised as follows: Chapter 2 summarises a
literature survey for Content Based Image Retrieval systems. Chapter 3 discusses the
requirement analysis, and specification. Chapter 4 focuses on the design of the image

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 4
retrieval system. Chapter 5 discusses the implementation details. Chapter 6 explains the
testing process that was carried out in the project. Chapter 7 focuses on the results of the
proposed system. Chapter 8 summarizes the project and discusses the work to be carried out
in the future.

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 5
CHAPTER 2
LITERATURE SURVEY ON IMAGE RETRIEVAL
Literature survey is one of the key steps in the project development, where good
amount of effort is put to learn and know the concepts, application, software and tools used,
drawbacks associated with each approach. After understanding the concept and latest trend,
the need for improvement is identified. Journals, web materials, etc. are used to learn and
understand the existing system.
2.1 Literature Review
Here different approaches [16] in image retrieval are discussed.
Figure 2.1 Approaches in CBIR system
Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 6
Semantics-Sensitive Approach
In [6], the author explains an approach to Content-Based Image Retrieval which is
called Semantic-Sensitive approach [16]. In order to extract the feature correctly, a semantic
categorization is followed. Following this categorization, similarity is computed based on the
region. The important aspect of the proposed system is its retrieval speed. For similarity
matching purpose, the measure used here is integrated region matching which enables the
faster retrieval. This approach categorizes the images as either textured-non textured graph-
photograph. This approach was applied to a database with 200,000 images. Its retrieval of
images was accurate and fast. It was robust to intensity variations, sharpness variations,
scaling, rotation, and cropping. The limitation in this approach was that while classifying the
image, it may fall into second semantic classes.
Blobworld Representation of Images
In [2], [16], the author has explained how the querying is done on region using
homogenous colour texture segments known as blobs. It transforms the raw pixel data to a
smaller set of image regions that are coherent in colour and texture. This kind of image
representation is known as Blobworld representation which is created by clustering points in
a joint colour-texture position feature space. Image to Image matching is not followed. If the
blobs are identified by the user which is related to some concept such as “rose” then the users
search will be looking for a rose within other images in several different backgrounds. This
approach requires the involvement of the user. This algorithm has been run on 10,000 natural
images. This approach allows the user to view image’s internal representation and its results.
Content-Based Image Retrieval Using Shape and Depth features
In [1], [16], an algorithm for retrieving images using the shape information in an
image is discussed by the author. The 3D information of the image is also taken in to account.
This linear approximation procedure captures the depth information based on the idea of
shape from shading. The objects are retrieved using the similarity measure that combines
both the shape and the depth information. This approach has been effective in retrieving
engineering objects.

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 7
Spatial-Bag-of-Features
In [18], [16], the method of retrieving large scale images using a new bag-of-features
that includes the information regarding geometry of object is discussed by the author. The
local features of an image are projected to different directions or points in order to generate
the ordered bag-of-features. Based on this approach, different group of spatial-bag-of-features
are considered in order to capture the invariance of object’s geometry. A new bag-of-features
is generated by considering the selected representative features. This system leads to good
image matching and indexing for image retrieval and it also includes the spatial information
of local features to improve the retrieval accuracy. The author first evaluated the spatial bag-
of-features which was compared with bag-of-features, and then the bag of features was
compared with RANSAC re-ranking. This experiment was carried on Oxford5K dataset. To
test the effectiveness and scalability of spatial bag-of-features the dataset Panoramio1M was
leveraged.
Hashing Shape Context Descriptors
In [10], [16], a method for arranging and indexing the logo digital libraries is
discussed. The retrieval system compares the query image with the logo images present in the
database and retrieves them based on their similarity. These logos are described by a variant
of the shape context descriptor. The Locality Sensitive Hashing indexing structure is used to
arrange the descriptors to carry out the search process. Hashing techniques speeds up the
indexing and retrieves logos based on similarity. The author has carried out the experiment
on the tobacco-800 dataset to demonstrate the effectiveness and efficiency the proposed
method. The author has validated the approach by using a repeated random sub-sampling
validation scheme.
Bag of Visual Words
In [12], [16], the approach of Bag of Visual Words to retrieve the relevant word
images from a big database correctly is discussed. The approach discussed here uses the
principles of text retrieval system. The word images are represented in the form of histogram
of visual words. The histogram carries the information of the features in the image. Visual
words are quantized to represent local features in an image. Bag of Visual words method does
not explain the spatial relationship among visual words so the author has used re-ranking
method to the retrieved list of images in order to improve the performance. The author has

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 8
validated this approach on different Indian languages and has proved it, to be language
independent and scalable. The author has demonstrated the utility of the proposed system
across four Indian languages by using the dataset of 100K words. To demonstrate the
scalability, the author has used large dataset of 1M words. The performance is measures by
precision. The limitation of this process is the re-ranking step which is time consuming.
Wavelet Based Color Histogram Image Retrieval
In [9], [16], the author has explained the Content Based Image Retrieval using the
color and texture feature called Wavelet Based Color Histogram Image Retrieval. Wavelet
transformation is used to extract the texture features and color histogram is used to extract the
color features. The combination of both texture and color feature is robust to scaling and
translation of objects in an image. In order to extract the color features from digital images, a
clear picture about the representation of color in images is needed. The texture descriptor
provides measures for the properties such as smoothness, coarseness, and regularity. The
similarity between the images is computed using the distance functions. The author has
demonstrated the proposed retrieval method on a WANG image database with 1000 general
purpose color images and compared with the results of different authors. The result of the
proposed method was shown to have better performance than others with the average
retrieval time as 1 minute.
Principal Visual Word Discovery
In [17], [16], the author has described a method to detect license plates in various
observation angles, scale changes and illumination variation. It can also detect multiple plates
in the image. Scale Invariant Feature Transform descriptors are used to deal with different
angles, scale changes etc. The process is carried out by finding the visual word and matching
it. The author has demonstrated the proposed method on two different dataset such as LP
dataset and another dataset named Caltech Cars .The proposed approach is lower than the
other approaches in terms of detection rate. The other approaches are HLPE, LPE, and ESM.
A false positive rate of only 1.0% is only made by this method. Feature extraction time and
detection time are the two things that are considered by the author during investigating the
time efficiency. It takes less time in average to process one image. But the approach fails to
detect the license plate when the image quality is poor.

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 9
Comparison of SIFT and SURF
In [11], [16], SIFT descriptor is discussed which is used to describe the interest points
from the images , where features in the images remain the same whatever may be the image
scale and rotation and Speeded up Robust Features, a descriptor which is invariant to both
scale and rotation makes use of integral images. Image registration is a process that converts
the various data into a single coordinate system. It is a quite a complicated task in many
applications. In the process of Image registration, features are detected and matched as a first
step, then a transformation function is derived according to the features in the image and
finally the image is reconstructed based on the transformation function. For the experiment
purpose two images are taken by the author. Both the descriptors detect the features. The
author found out that SIFT descriptor detects more features when compared to SURF, but
SURF was found to be fast.
Scalable Partial-Duplicate Mobile Search
In [14], [16], the author has explained the large-scale partial duplicate image search
on the platforms of mobile. The SIFT descriptor, which is a histogram based descriptor is not
the best descriptor for the search so the author has proposed the Edge-SIFT (Scale Invariant
Feature Transform) descriptor. The descriptor is built with the help of edge maps by
considering both the location and orientation of edges. An inverted file based indexing
framework is said by the author in order to make use of Edge-SIFT descriptor. The Oxford
Building dataset is used in order to test the effects of different parameters and to evaluate the
validity of Edge-SIFT compression and compares with SIFT and ORB. Edge-SIFT perform
better than the other two approaches in terms of retrieval accuracy, efficiency, and
transmission cost and memory consumption. It cannot perform the tasks such as recognition
or classification.
Semantic-aware Co-indexing
In [13], [16], the author explains an algorithm called Semantic-aware Co-indexing
algorithm for vocabulary tree based image retrieval. It searches the images based on the
conditions such as the similarities between the images are based on the local features and
semantic attributes into the inverted indexes. After the search, the retrieval process considers
not only the images having same local features but also allows consensus in their semantic

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 10
similarities. The proposed algorithm changes the inverted indexes of local features which are
quantized by a large vocabulary tree. The methods used for the extraction of the BOW
features from the images are HOG and LBP, and the SIFT descriptors are extracted to use the
vocabulary tree. The online indexing of the features produced in this process is simple and it
is less memory consuming. The author has demonstrated the proposed approach on three
different datasets such as Holidays, UKbench, and Oxford. The overall discriminative
capability of the inverted indexes is increased by this system, which gives good retrieval
results.
Object based Image Retrieval using Combined Features
In [4], [16], local and global features are used to identify and extract the images. The
Bi-directional Empirical Mode Decomposition technique is used to detect the edges and
Harris Corner detector is used to detect the corner points of an image. HSV color feature is
used as the global feature. The author has applied the system on the ten categories of images
each with seventy two different orientations from COIL-100 image database.
HSV-Color Histogram and GLCM
In [3], [16], the Content Based Image Retrieval, which retrieves the images based on
the similarity of color and texture features of image sub blocks is discussed. The image is
segmented into sub-blocks of equal size. In order to extract the color from each sub block, the
HSV color space is quantified into non equal intervals and it is represented by cumulative
histogram. Gray-level occurrence matrix is used to get the texture of the sub-blocks. The
Similarity measure used here is Euclidean distance. This method has better performance than
the other system that uses only HSV color or GLCM texture or both HSV color and GLCM
texture.
Deep learning for Content-Based Image Retrieval
In [7], [16], the author has discussed a framework for CBIR .A large-scale deep
convolution neural networks is trained for learning feature representation of images .Deep
learning is an approach of machine learning. In this technique layers of information are
exploited for pattern classification for feature classification. The author has conducted
empirical studies for comprehensive evaluations of deep convolution neural networks with
applications to learn feature representations for different CBIR tasks under different settings.
The performance of feature representation scheme has been evaluated on new CBIR tasks

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 11
such as object retrieval using the Caltech256 dataset, facial image retrieval tasks using the
Pubfig83LFW dataset.
Summary
This chapter summarizes the state of the art methods and practices developed to
retrieve images. Most of the methods utilize image features like texture, color, shape, depth
for retrieving images. Methods which rely on color, texture fail to retrieve images taken at
different day light, views etc. Bag of visual word is an approach based on text retrieval
system, where vocabularies of image features are used for comparison and retrieval of
relevant images. Bag of Visual words method does not explain the spatial relationship among
visual words; hence accuracy of relevant image retrieval is low. SIFT descriptor based
retrieval system utilizes interest points and descriptors which defines the spatial relationship,
hence making it more efficient in retrieval. However SIFT is slow compared to other
methods. SURF is another approach based on feature vectors which is faster compared to
SIFT. Based on the literature study there is a need to develop new method for efficient image
retrieval system for the growing need of social media

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 12
CHAPTER 3
ARCHITECTURE OF CBIR SYSTEM
This chapter discusses the requirements and the overall design of the project. Design is an
explanation of the structure of the software that has to be implemented, and the algorithms
used. In the design phase, the translation of requirements takes place. The translation will be
a representation of software. The development of project is categorised into two activities
such as:
Top-level design: - It is also called as architectural design, which explains the
architecture of the system and identifies the various components. It also explains the
components relationship to one another.
Detailed design: - This explains each and every component in detail.
3.1 Requirement Analysis and Specification
The requirements are clearly understood and systematically organised in a specification
document called as Software Requirements Specification (SRS) document.SRS document
gives the overall behaviour of the system to be developed. The document includes the use
cases that describe how the user interacts with the software. The use cases are also called as
functional requirements. The document also maintains the non functional requirements which
impose the constraints on the design part or implementation. The constraints may be
performance requirements, quality standards or design constraints.
Functional Requirements
Functional Requirements defines how the system should respond to the given inputs or
conditions. The requirements may be calculations, processing or other functionalities that
defines what the system should accomplish. The following functional requirements are
identified in the system developed:
The system should provide a user interface for users to input the query image and
view the retrieved images.
The system should be able to upload the image from the dataset as per the user
request.

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 13
The system should be able to detect the interest points from the query image.
The system should be able to describe the detected interest points of the query image
by employing two descriptors.
The system should be able to combine the described interest points of the query
image.
The system should be able to convert the feature vectors into binary.
The system should be able to calculate the distance between the query image feature
and dataset image features for the similarity matching.
The system should be able to rank the images based on their similarity distance.
The system should be able to retrieve the images based on their ranking.
The system should provide an interface for the user to view the retrieved images.
Non Functional Requirements
The characteristics of the system are dealt by the non functional requirements. It could
be the constraints on the functions offered by the system. The characteristics are such as:
Reliability
It is the ability of a system to perform and maintain its required functions under
normal as well as unexpected conditions.
Robustness
It is the ability of the system to work well under ordinary as well as unexpected
conditions that stress its designer’s assumptions.
Usability
It is a qualitative attribute that measures how easy the user interface is to use. It is
associated with the functionalities of the system.
Portability
It is the software codebase feature which reuses the existing code instead of creating
new code when moving the software from an environment to another.
Performance
It is measured by the amount of work carried out by the system compared to the time
and resources used. It includes response time, completion time.
Cost
It is the value of money used to develop the software.

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 14
Scalability
It is the ability of the system to handle the growing amounts of work.
3.2 Architecture of the proposed CBIR system
Architectural design describes the high level overview of the decomposition of the
system. The decomposition is structural decomposition and functional decomposition. It
gives the information regarding the roles played by the system components. The Top level
design gives the System Block diagram which forms the blueprint of the system developed.
Figure 3.1 shows the high level architecture of the image retrieval system.
Development process involves the following steps:
User input
Pre Processing
Feature Extraction
Binarization
Similarity Computation and Ranking
Retrieval of images

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 15
Figure 3.1: Architecture of the proposed CBIR system
User Input
The user interface allows the user to input the query image and to visualise the similar
images that are being retrieved.
Pre Processing
Once the input is given, Pre-processing is done on the images at the lowest level of
abstraction. It aims at either modifying or enhancing the features of the image. Images are
processed, in order to represent the details of the image in numerical form.
Feature Extraction
The feature extraction subsystem extracts the interest points from the images, encodes
them into feature vectors. The encoded feature vectors are stored in the feature database,
which are further used for feature comparison. In this proposed system feature extraction

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 16
step is improved by incorporating SIFT, SURF descriptors and Hessian detector which
brings unique advantage to get improved image retrieval compared to existing methods.
Binarization
The query processing module extracts a feature vector from the query image, converts
them into binary as the binary codes are storage efficient and they require only few bits,
and makes the similarity process fast.
Similarity Computation and Ranking
The query processing module uses a distance measure (Hamming Distance) to find
the similarity between the query image and database images. Search results then can be
sorted based on the distance to the queried image.
Retrieval of Images
The images from the dataset relevant to the query image are retrieved based on the
similarity distance computed in the similarity computation and Ranking module.
3.3 Workflow of the system
This section gives the work flow of the CBIR system.
Figure 3.2: Work Flow of CBIR system

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 17
Summary
This chapter has covered the details of high level design such as system architecture
and workflow of the system. Using system architecture, step by step execution is explained
right from query image processing, database images processing, binarization, comparison and
retrieval. Feature extraction step is improved with the help of multiple descriptors which
makes the proposed system better on relevant image retrieval.

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 18
CHAPTER 4
LOW LEVEL DESIGN
The detailed low-level design provides the full details about the specification of the
design, for the system that will be developed.
4.1 Class Diagram
A class diagram describes the relationship between various classes and their
properties.
Figure 4.1: Class Diagram

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 19
4.2 Use Case Diagram
Use Case diagram describes the functionalities of the given system in terms of user,
target and interdependencies among the use cases. The use case diagram for the project is
shown in figure 4.2
Figure 4.2: Use-Case Diagram
The use cases for the proposed system are given above. Actor is the user who inputs the
query image, compares with the database images and retrieves the images relevant to the
query image.

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 20
4.3 Sequence Diagram
A Sequence diagram shows the operation of the processes with one another. It is said
to be an interaction diagram. It shows the order of the interaction and sequence of messages
between the processes.
Figure.4.3: Sequence Diagram
In the figure 4.3 , the vertical lines that are parallel indicate the different processes
involved in the proposed system and the horizontal lines gives the information that are
exchanged between those processes. The rectangles are called method call boxes that
represent the processes that are performed in response to the information.
Summary
This chapter gives an overview at low level design with the help of use case diagram,
sequence diagram and class diagram. Use case diagram visually explains the one to one
interaction between the user and modules such as the pre processing, query processing and
feature similarity module of the proposed method. With the help of sequence diagram, the
User Image Visual Content Feature Vector Similarity Result

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 21
order of the interaction and sequence of messages between the processes is explained. The
messages such as the features extracted from the images, the generated feature vectors, and
computed similarity distance is exchanged between the processes. Using class diagram,
functionalities of different classes such as the Hessian detector, SIFT and SURF descriptors
are explained.

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 22
CHAPTER 5
IMPLEMENTATION
The implementation phase gets the software or hardware operating system correctly in
its environment, including installation, configuration, running, and testing. This chapter
discusses the modules of the project such as pre processing, query processing, and similarity
and retrieval module.
5.1 Tool used for implementation
Appropriate tool has to be chosen while designing and building a software system in
order to implement the system. It will reduce the complexities in the coding and, testing part.
It will make the program readable one. It has good graphics capabilities. Matlab has become
such an important tool through the use of sets of its programs which supports a particular
work. These sets of programs are called toolboxes. The proposed system uses the image
processing toolbox.
In this project, MATLAB is used for implementing the design. Reasons for choosing it as
tool for implementation are listed below:
A high end numerical computing tool and environment for algorithm development,
for visualising and analysing the data
It manages codes, files, and data. It provides sophisticated platform to handle matrix
operations. Hence this is used in this project as a tool to handle digital images.
It can solve difficult mathematical problems for linear algebra, statistics, numerical
integration and differentiation
Custom GUI are build by the tools provided by MATLAB
Easy to integrate with other languages like C, C++, Fortran, Java, COM, and
Microsoft Excel.
5.2 Platform used for implementation
The application programs runs on the underlying computer system, the platform. In
this project, Windows 7 is used as a platform. Windows 7 is chosen as it is more flexible
when compared to Windows 95/98/XP. It has the capability of fast user switching that is, a

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 23
user can leave his desktop with all the applications open while the other user can use the
desktop with the same settings.
5.3 Module Implementation
This project has been implemented on Windows 7 platform using MATLAB. The
modules of the project are as follows:
5.3.1 Pre-Processing
Once the input is given, Pre-processing is done on the images at the lowest level of
abstraction. It aims at either modifying or enhancing the features of the image. Images are
processed, in order to represent the details of the image in numerical form.
5.3.2 Query Processing Module
The feature extraction subsystem extracts the interest points from the images, encodes
them into feature vectors and stores them into the feature database.
Corner refers to the position at which two lines, surfaces, or edges meet and form an
angle. Hessian affine region detector detects the interest points of the images which are
corners. First, the input image is smoothened with the help of guassian filter.The detector
finds the derivative points in the images. Feature points are obtained by comparing the
deriavative points with the pixels of the image.First, the images are initially divided into
small regions with particular window size. The interest points in the image are identified by
finding the derivatives of the particular region. The detector computes the second partial
derivative Ixx, Ixy, and Iyy for each image point. It also searches for the points where the
Hessian determinant is maximal.
The determinant of Hessian matrix [22] is given as below:
Ixx Ixy
H=
Ixy Iyy
Det (H) = IxxIyy – I^2xy -- (1)

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 24
The search is carried out by calculating the resultant image containing determinant
values. Later 3x3 search window is used to identify local maxima and in this process non
maximum points in the neighbourhood are suppressed. The search window is moved over the
entire image. The pixels with the larger value than the immediate neighbour values in that
window are alone kept. The detector gives all the remaining locations which are having a
value above a predefined threshold value. The resulting detector results are placed on corners.
Scale Invariant Feature Transform detects and describes the interest point of the
images and generates the descriptors which are feature vectors. First, the algorithm
smoothens the image using the Guassian filter.The first order and second order derivatives of
the image is computed. The Laplacian of Guassian[21] is calculated as
Δ2G = Ixx + Iyy -- (2)
The values are then arranged in a matrix format. The descriptor follows four steps to
extract the key points such as the detection of scale space extrema,localization of key points,
orientation assignment ,and key point descriptor generation.
Scale Space Extrema detection
Images are represented in various scales. The scale space representation is
parameterised by the size of the smoothening kernel.
Figure 5.1: Scale Space Extrema Detection [21]
The pixel X in the figure is compared with all the remaining 26 pixels in both the current
and adjacent scales. From this comparison, the pixel that is larger or smaller than all 26 pixels
will be choosen.

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 25
Keypoint localization
Extrema detection is done, from which, the points are taken. Since there are many
number of points, the locations of keypoints will not be accurate. The threshold value is
set in order to remove the outliers that is the weak points will be removed.
Orientation Assignment
Each keypoint is assigned an orientation. Relative to this orientation, the keypoint
descriptor is represented. The keypoint can also attain invariance to image rotation. The
derivatives, gradient magnitude, and direction of the smoothened input image is
computed at the scale of keypoint[21].
M(x,y) = sqrt ( Ix^2 + I y^2) -- (3)
θ(x,y) = tan-1 Ix/Iy --(4)
In a neighborhood of a key point, a wieghted direction histogram is created. Here
weights are represented as gradient magnitudes. The peak is selected as the direction of
the key point as depicted in the figure 5.2.
Figure 5.2: Orientation Assignment [21]
Keypoint Descriptor
At the keypoint, the relative orientation and magnitude in a 16 x 16 neighborhood is
calculated. For a 4 X 4 region, a weighted histogram is computed. The 16 histograms is
concatenated in one long vector of 128 dimensions. The numbers are hold on as feature
vector.
Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 26
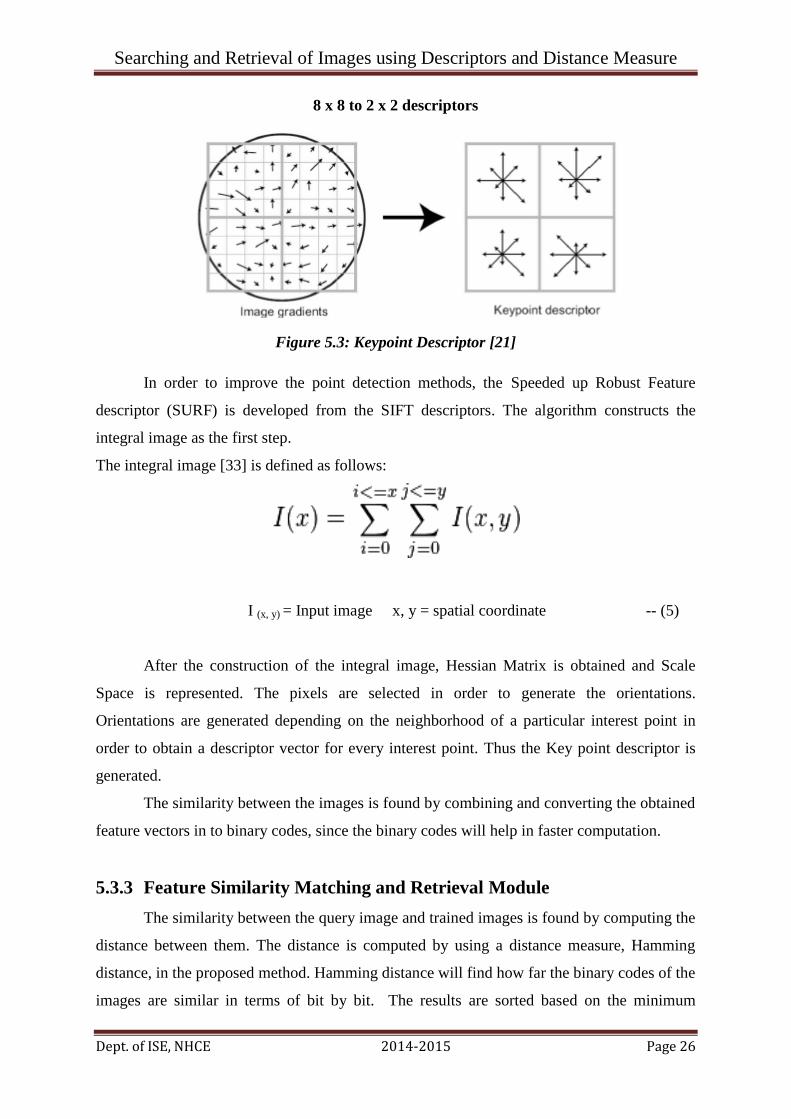
8 x 8 to 2 x 2 descriptors
Figure 5.3: Keypoint Descriptor [21]
In order to improve the point detection methods, the Speeded up Robust Feature
descriptor (SURF) is developed from the SIFT descriptors. The algorithm constructs the
integral image as the first step.
The integral image [33] is defined as follows:
I (x, y) = Input image x, y = spatial coordinate -- (5)
After the construction of the integral image, Hessian Matrix is obtained and Scale
Space is represented. The pixels are selected in order to generate the orientations.
Orientations are generated depending on the neighborhood of a particular interest point in
order to obtain a descriptor vector for every interest point. Thus the Key point descriptor is
generated.
The similarity between the images is found by combining and converting the obtained
feature vectors in to binary codes, since the binary codes will help in faster computation.
5.3.3 Feature Similarity Matching and Retrieval Module
The similarity between the query image and trained images is found by computing the
distance between them. The distance is computed by using a distance measure, Hamming
distance, in the proposed method. Hamming distance will find how far the binary codes of the
images are similar in terms of bit by bit. The results are sorted based on the minimum

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 27
Hamming distance. The retrieval module helps to select the images that will be presented to
the user as a result to query image based on the sorted distance.
Summary
This chapter has explained the steps involved in developing the proposed image
retrieval method. Major steps are interest point extraction and definition of feature vectors.
Hessian affine detector detects the corner points in the images. In SIFT method, interest
points are identified in scale space, key point localization, orientation assignment and key
point description. In SURF method, the integral image is constructed, interest points are
represented in scale space, hessian matrix is obtained and orientations are generated in order
to obtain the descriptor for every interest point. Calculated feature vectors of query image are
then used to compare with all feature vectors available in the data base. Image with minimum
hamming distance is identified as nearest match and the same image is retrieved. Entire
algorithm for this proposed method was developed using Matlab with user friendly Graphical
user interface.
Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 28
CHAPTER 6
TESTING
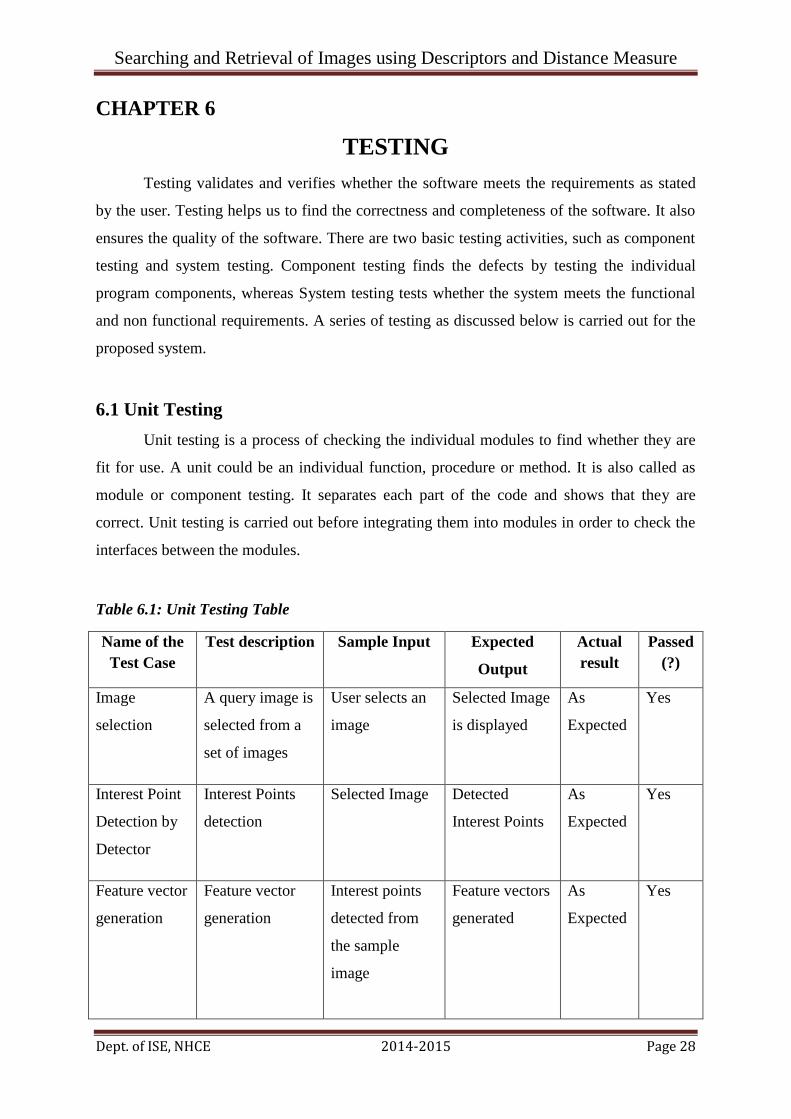
Testing validates and verifies whether the software meets the requirements as stated
by the user. Testing helps us to find the correctness and completeness of the software. It also
ensures the quality of the software. There are two basic testing activities, such as component
testing and system testing. Component testing finds the defects by testing the individual
program components, whereas System testing tests whether the system meets the functional
and non functional requirements. A series of testing as discussed below is carried out for the
proposed system.
6.1 Unit Testing
Unit testing is a process of checking the individual modules to find whether they are
fit for use. A unit could be an individual function, procedure or method. It is also called as
module or component testing. It separates each part of the code and shows that they are
correct. Unit testing is carried out before integrating them into modules in order to check the
interfaces between the modules.
Table 6.1: Unit Testing Table
Name of the
Test Case
Test description Sample Input Expected
Output
Actual
result
Passed
(?)
Image
selection
A query image is
selected from a
set of images
User selects an
image
Selected Image
is displayed
As
Expected
Yes
Interest Point
Detection by
Detector
Interest Points
detection
Selected Image Detected
Interest Points
As
Expected
Yes
Feature vector
generation
Feature vector
generation
Interest points
detected from
the sample
image
Feature vectors
generated
As
Expected
Yes

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 29
Retrieval of
Images
Retrieval of
Images
Distance
computed for
the query and
dataset images
List of images
based on the
minimum
distance
As
Expected
Yes
6.2 Integration Testing
Integration testing is done, once when the unit testing of the modules is over. In
integration testing, the individual modules are tested first. Then they are tested as a group. It
takes those modules as input, that has been unit tested and aggregates them. This testing is
carried out to verify the functional and performance requirements.
Integration Testing Table
Table 6.2: Integration Testing Table
Modules Functions integrated Tests carried out
Query Processing Module Interest Point Detection
Feature Vector Generation
The module is tested to check
whether the interest points
are correctly detected and
described. It is also tested to
see whether the feature
vectors are correctly
generated.
Feature Similarity Matching
and Retrieval Module
Computation of distance of
query image
Retrieval of images based on
minimum distance
The module is tested to check
whether the retrieved list of
images is relevant to the
query image.
6.3 System Testing
System testing is carried out on the integrated system in order to check the
compliance of the system with its requirements. The components that were successful in
integration testing are the inputs for system testing. The purpose of system testing is to check
whether there are any inconsistencies between the software units that were integrated
together. It also validates whether the system meets the specified requirements. It also checks
the design, behaviour and the expectations of the user.

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 30
System Testing Table
Table 6.3: System Testing Table
Functionality Test Input Tests conducted
Working of Proposed System
Image
Functional requirement test
Summary
The proposed system has been tested rigorously at different levels right from unit
testing up to system testing. At unit level key tests like query image selection, corner
detection, interest point detection, image display, and similarity distance calculation, relevant
images retrieval were checked and ensured. Subsequent to unit level testing, integration tests
were also carried out to eliminate errors due to integration of modules. All these tests and
checks confirmed the compliance of functional requirements of the proposed module

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 31
CHAPTER 7
RESULTS AND DISCUSSION
The tool MATLAB R2013a (8.1.0.604) is used to carry out the experiment. For this
experiment, a dataset with one hundred and fifty images in JPEG format of size 256 x 256 is
employed as shown in figure 7.1. Searching of images relies on the similarity means rather
than the actual matching. Every query image returns the top 10 closest matching images.
The dataset used for the experiment contains 150 images which are shown below:

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 32
Figure 7.1 Dataset used for the proposed system
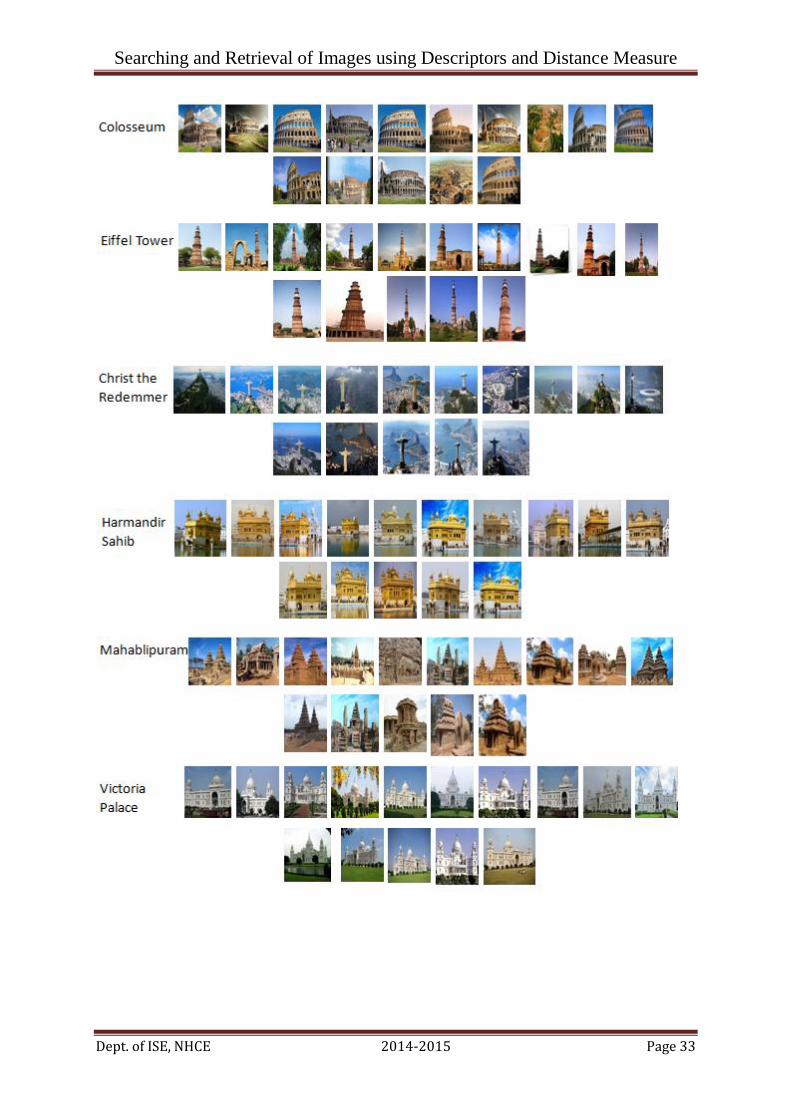
The following are the different categories of images in the dataset:
Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 33

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 34
Figure 7.2 Different categories of images used for the proposed system
The evaluation measures for the proposed system are Recall and Precision [23].
Precision [23] is the ratio of relevant images to total retrieved images as given in equation
7.1, whereas Recall [23] is the ratio of appropriate images to total relevant images as given in
the equation 7.2. Here appropriate images refer to the relevant images. The mean average
precision and recall values for the proposed system are given in table 7.2.
Precision: A -- (6)
C
A: Number of relevant images retrieved
C: Total Number of images retrieved
Recall: A -- (7)
B
A: Number of relevant images retrieved
B: Total Number of relevant images
Mean Average Precision: ∑ Precision -- (8)
In the proposed system, the distance between the feature vectors of given image and
database is computed in order to find the similarity between them based on the minimum
distance. The distance measure used in this work is Hamming distance.
Hamming distance = √ ((mean (feature vectors of query image)-mean (feature vectors of dataset image)) ^2
-- (8)

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 35
The Precision and Recall values for different categories of images are:
Table 7.1: Precion and Recall for each category
Category Precision Recall
Taj Mahal 0.94 0.63
Ice Berg 0.58 0.56
Pyramid 0.78 0.52
Colosseum 0.77 0.51
Eiffel Tower 0.73 0.48
Christ the Redeemer 0.70 0.47
Harmandir Sahib 0.95 0.63
Mahablipuram 0.60 0.40
Victoria Palace 0.67 0.44
Iskcon Temple 0.74 0.49
The graph showing the precision and recall values for different categories of images are:
Graph 7.1: Precision and Recall for each category
The precision level for each category is in the order of 0.7 and recall in the order of 0.5.The
proposed method is capable of producing high level of precision and recall even for wider

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 36
range of images starting from taj mahal to iskcon temple with different views , colors and
depth.
The below image indicates the retrieved similar images for the given input image:
Figure 7.3: Retrieved list of images

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 37
The Precision and the Recall measure for the proposed method is as follows:
Table 7.2: Mean Average Precion and Recall
Method Mean Average Precision Recall
Existing method 0.67 0.45
Proposed Method –
SIFT+SURF+Hessian
0.74 0.51
Comparison Graph
The proposed algorithm was tested for 150 images. The Mean Average Precision was
found to be increasing by 7% and Recall was found to be increasing by 6% when compared
to the existing method because of two descriptors and one detector being employed in this
work in order to detect, describe the interest points and spatial context information.
Graph 7.2: Mean Average Precision and Recall
Summary
The proposed method retrieved relevant images for the given query image accurately.
The performance has been evaluated using several test images ranging from Taj Mahal , Ice
Berg, Pyramid, Colosseum, Eiffel Tower, Christ the Redeemer, Harmandir Sahib,
Mahablipuram, Victoria Palace and Iskcon Temple with different views, colours and depth.
Mean average precision of the proposed method is 0.74; recall is 0.51, which are higher than

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 38
the existing method [19] by 7%. This proves the proposed approach of SIFT+SURF+Hessian
has better retrieval accuracy compared to other techniques even with significantly different
angles and daylight colours.

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 39
CHAPTER 8
CONCLUSION AND FUTURE WORK
CONCLUSION
Accurate image retrieval is one of the growing needs in order to make use of the huge
number of images that are available in social/web media. There are several methods
developed for image retrieval right from techniques like text based, local and global features
like colour, texture, shape etc. Every method has its own merits and de-merits. In this project
a new approach is proposed which is based on SIFT, SURF descriptors and Hessian detector.
This approach is based on identification of interest point with spatial context information and
generation of feature vector. These feature vectors of query image and data base images are
used for comparison and retrieval with the help of minimum hamming distance. Since the
proposed method does not rely on color or texture, this can accurately retrieve similar images
with different angle and daylight exposure. This proposed method was developed and tested
using Matlab and accuracy of the system was experimented with 150 significantly different
set of test images. Results were found better than existing method [19] by more than 7% in
terms of mean average precision and recall.
FUTURE WORK
In future, work can be carried out in reducing the number of features in images, with
the same retrieval performance. Also research can be done on image interpretation, text
retrieval from images and interpretation as a next step of similarity matches. The experiment
need to be tested in a very large database in real-time web application.

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 40
REFERENCES
[1] Amit Jain, Ramanathan Muthuganapathy, and Karthik Ramani, “Content-Based
Image Retrieval Using Shape and Depth from an Engineering Database”, G. Bebis et
al. (Eds.): ISVC 2007, Part II, LNCS 4842, pp. 255–264, 2007.
[2] C. Carson, S. Belongie, H. Greenspan, and J. Malik, “Blobworld: Image
Segmentation Using Expectation-maximization and Its Application to Image
Querying”, IEEE Trans. Pattern Analysis and Machine Intelligence, 24(8):1026-1038,
2002.
[3] Deepak John, S.T.Tharani, and SreeKumar.K, “Content Based Image Retrieval using
HSV-Color Histogram and GLCM”, An International Journal (IJARCSMS), Vol.2,
Issue No.1, January 2014.
[4] H.Kavitha, M.V.Sudhamani, “Object based Image Retrieval from Database using
Combined Features”, International Journal of Computer Applications, Vol.76, Issue
No.8, August 2013.
[5] J. Sivic and A. Zisserman, “Video google: A text retrieval approach to object
matching in videos”, in Proc. IEEE Conf. Comput. Vis. Pattern Recognit. (CVPR),
Dec.2003, pp. 1470–1477.
[6] J.Z. Wang, J. Li, and G. Wiederhold, “SIMPLIcity: Semantics-Sensitive Integrated
Matching for Picture Libraries”, IEEE Trans. Pattern Analysis and Machine
Intelligence, 23(9), 947–963, 2001.
[7] Ji Wan, Dayong Wang, Steven C.H. Hoi, Pengcheng Wu,Jianke Zhu, Yongdong
Zhang, Jintao Li,” Deep Learning for Content-Based Image Retrieval: A
Comprehensive Study”, in Proc. ACM Int. Conf. Multimedia, 2014.
[8] Lowe, D. “Distinctive image features from scale-invariant keypoints” International
Journal of Computer Vision, 60, 2 (2004), pp. 91-110.
[9] Manimala Singha and K.Hemachandran, “Content Based Image Retrieval using Color
and Texture”, Signal & Image Processing: An International Journal (SIPIJ) Vol.3,
No.1, February 2012.
[10] Marçal Rusinol, Josep Llados,“ Efficient Logo Retrieval through Hashing Shape
Context Descriptors”, in Proc. ACM, 2010.
[11] P M Panchal, S R Panchal, S K Shah,” A Comparison of SIFT and SURF”, IJIRCCE,
Vol.1.Issue 2, April 2003.

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 41
[12] Ravi Shekhar and C.V. Jawahar, “Word Image Retrieval using Bag of Visual Words”,
in Proc.IEEE, 2012.
[13] S. Zhang, M. Yang, X. Wang, Y. Lin, and Q. Tian, “Semantic-aware co-indexing for
image retrieval”, in Proc. IEEE Int. Conf. Comput. Vis. (ICCV), Apr. 2013, pp. 1–8.
[14] S. Zhang, Q. Tian, K. Lu, Q. Huang, and W. Gao, “Edge-sift: Discriminative binary
descriptor for scalable partial-duplicate mobile search,” IEEE Trans. Image Process.,
vol. 22, no. 7, pp. 2889–2902, Jul. 2013.
[15] Subathra Muthuraman, Mrs.Swathi Baswaraju, Mrs.B.Mounica, “Large Scale Image
Retrieval using Descriptors and Distance Measure”, IJCSMC, Vol.4, Issue No.5, May
2015.
[16] Subathra Muthuraman, Mrs.Swathi Baswaraju, Mrs.B.Mounica, “Survey on
Contextual Hashing for Searching and Retrieval of Images using Descriptors and
Distance Measure”,IJERT,Vol.4,Issue No.1,Jan 2015.
[17] W. Zhou, H. Li, Y. Lu, and Q. Tian, “Principal visual word discovery for automatic
license plate detection”, IEEE Trans. Image Process., vol. 21, no. 9, pp. 4269–4279,
Sep. 2012.
[18] Y. Cao, C. Wang, Z. Li, L. Zhang, and L. Zhang, “Spatial-bag-of features”, in Proc.
IEEE Conf. Comput. Vis. Pattern Recognit., Jun. 2010, pp. 3352–3359.
[19] Zhen Liu, Houqiang Li, Wengang Zhou, Ruizhen Zhao, and Qi Tian,“Contextual
Hashing for Large-Scale Image Search”, IEEE transactions,VOL.23, No.4, April
2014.”
[20] http:// en.wikipedia.org/wiki/Content-based_image_retrieval [ July 2014]
[21] http://crcv.ucf.edu/people/faculty/shah.php [ August 2014]
[22] http://en.wikipedia.org/wiki/Hessian_affine_region_detector [August 2014]
[23] http://en.wikipedia.org/wiki/Precision_and_recall [ February 2015]
[24] http://en.wikipedia.org/wiki/Scale_space [ August 2014]
[25] http://ijarcet.org/wp-content/uploads/VOLUME-2-ISSUE-6-2077-2080.pdf
[26] http://in.mathworks.com/products/matlab [ September 2014]
[27] http://in.mathworks.com/support/install-matlab.html [September 2014]
[28] http://www.academia.edu/5089977/A.Net_Implementation_of_a_Content-
Based_Image_Search_Component [ December 2014]
[29] http://www.ijrat.org/downloads/may-2014/paper%20id-25201471.pdf [December
2014]

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 42
[30] http://www.researchgate.net/publication/264276256Image_Retrieval_A_Literature_
Review [ December 2014]
[31] http://www.scribd.com/doc/28209229/CBIR-Content-Based-Image-Retrieval#scribd
[ March 2015]
[32] http://www.uni-weimar.de/medien/webis/publications/papers/stein_1999a.pdf
[December 2014]
[33] www.vision.ee.ethz.ch/~surf/eccv06.pdf [July 2014]

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 43
Appendix-A
ACRONYMS
The acronyms used in the project are:
CBIR - Content Based Image Retrieval
SIFT -Scale Invariant Feature Transform
SURF -Speeded Up Robust Feature
BOV - Bag of Visual words
RANSAC - Random Sample Consensus
LOG - Laplacian of Gaussian
SRS -Software Requirement Specification
QBIC - Query by Image Content
HOG - Histogram of Oriented Gradient
LBP - Local Binary Pattern
MATLAB -Matrix Laboratory
BOW -Bag of Words
GUI -Graphical User Interface
GLCM - Gray Level Co-occurrence Matrix
Readme
The experiment is carried out with the following requirements:
Processors : Intel Pentium
RAM : 2 GB.
Storage : 1GB.
Platform : Windows 7
Software : MATLAB R2013a (8.1.0.604)
Installation Procedure for MATLAB software [32]
The following files have to be downloaded [32]:
win32.rar or win64.rar (for 64 bit system)
PLP

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 44
"license.dat" into a folder.
The steps [32] for installation are as follows:
Step 1: First, the setup.exe file has to be double clicked
Step 2: Once, the setup file is clicked, the installer shows the dialog box, from which the
option install without using the internet [32] has to be chosen.
Step 3: The license agreement has to be accepted.
Step 4: The file installation key has to be entered.
Step 5: The installation type has to chosen, either the typical or custom type.
Step 6: The folder has to be specified, where the Matlab has to be installed.
Step 7: The location of the license file has to be specified.
Step 8: After specifying the location of the license file, press Next to continue the installation.
Step 9: The files has to be copied to the drives.
Step 10: The installation is complete.
Step 11: Add the environment variables.

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 45
Appendix-B
SNAPSHOTS
The following snapshots define the results or outputs that we will get after step by
step execution of all the modules of the system.
Figure A.1: Main Screen

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 46
When the button named input image is clicked, the below screen appears to select the
query image.
Figure A.2: Dataset Images

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 47
After selecting the input image , the interest points are detected as below:
Figure A.3: Detected Interest Points

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 48
When the button named combined features is chosen, the detected interest point by
the detector and the feature vector of the interest point generated by the descriptors are
combined together and displayed as follows:
Figure A.4: Combined Features

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 49
The detected interest points by the Hessian affine detector are as shown as below:
Figure A.5: Hessian Detector Points
Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 50
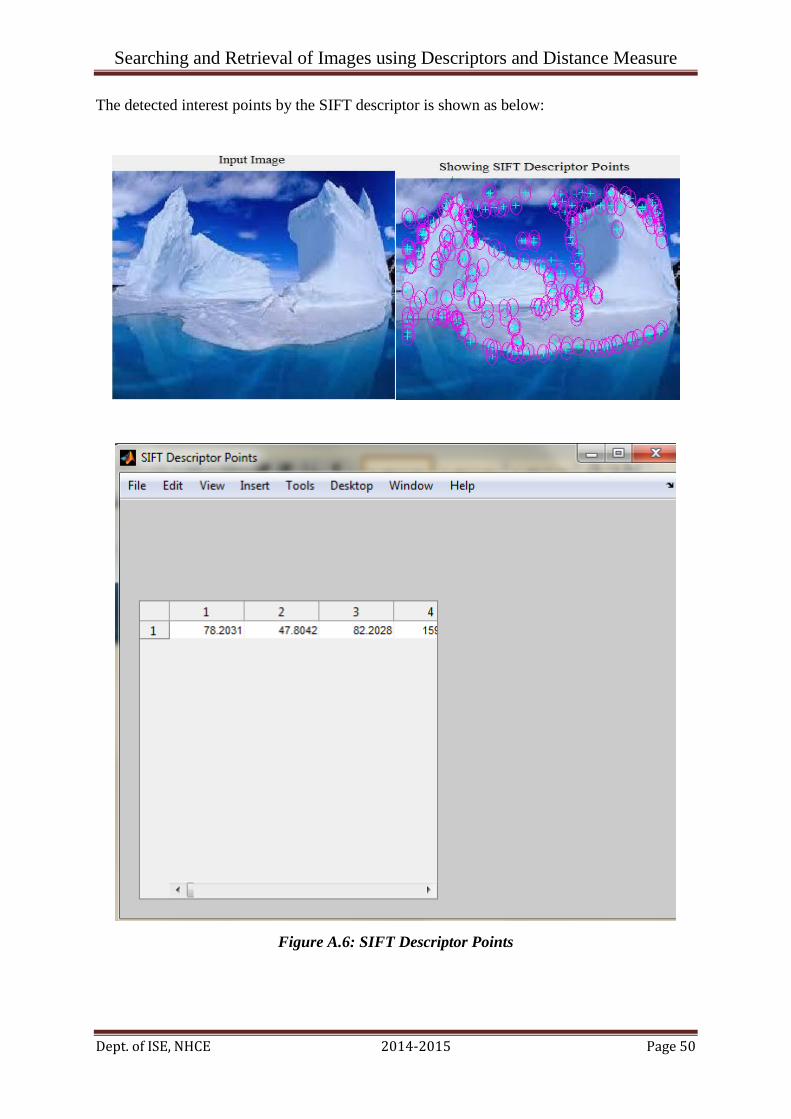
The detected interest points by the SIFT descriptor is shown as below:
Figure A.6: SIFT Descriptor Points

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 51
The SURF descriptor points are shown as below:
Figure A.7: SURF Descriptor points

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 52
The spatial context information of the interest points are shown as below:
Figure A.8: Spatial context information – Hessian Points
Figure A.9: Spatial context information – SIFT Points

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 53
Figure A.10: Spatial context information – SURF Points
When the button named Retrieval is chosen, the list of images relevant to input image
appears with the similarity distance.
Figure A.11: Result Display

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 54
Appendix-C
PAPER PUBLISHED IN INTERNATIONAL JOURNAL OF
ENGINEERING RESEARCH & TECHNOLOGY

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 55

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 56

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 57

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 58
Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 59
PAPER PUBLISHED IN INTERNATIONAL JOURNAL OF
COMPUTER SCIENCE AND MOBILE COMPUTING

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 60

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 61

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 62

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 63

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 64

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 65

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 66

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 67

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 68

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 69

Searching and Retrieval of Images using Descriptors and Distance Measure
Dept. of ISE, NHCE 2014-2015 Page 70