UNIVERSIDAD TECNOLOGICA EQUINOCCIAL - Repositorio ...
99
UNIVERSIDAD TECNOLOGICA EQUINOCCIAL FACULTAD DE CIENCIAS DE LA INGENIERÍA E INDUSTRIAS CARRERA DE INGENIERÍA DE PETRÓLEOS ANÁLISIS DEL USO DE HERRAMIENTAS MWD Y LWD EN COMBINACIÓN CON SISTEMAS ROTATIVOS ORIENTABLES RSS, COMO UN SISTEMA DE OPTIMIZACIÓN DE LA PERFORACIÓN EN POZOS DEL ORIENTE ECUATORIANO TRABAJO PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO DE PETRÓLEOS ANDRÉS SEBASTIÁN DÁVALOS MORENO DIRECTOR: Ing. EDWIN PLÚAS, MSc Quito, Junio 2016
-
Upload
khangminh22 -
Category
Documents
-
view
3 -
download
0
Transcript of UNIVERSIDAD TECNOLOGICA EQUINOCCIAL - Repositorio ...

UNIVERSIDAD TECNOLOGICA EQUINOCCIAL
FACULTAD DE CIENCIAS DE LA INGENIERÍA E
INDUSTRIAS
CARRERA DE INGENIERÍA DE PETRÓLEOS
ANÁLISIS DEL USO DE HERRAMIENTAS MWD Y LWD EN
COMBINACIÓN CON SISTEMAS ROTATIVOS ORIENTABLES
RSS, COMO UN SISTEMA DE OPTIMIZACIÓN DE LA
PERFORACIÓN EN POZOS DEL ORIENTE ECUATORIANO
TRABAJO PREVIO A LA OBTENCIÓN DEL TÍTULO
DE INGENIERO DE PETRÓLEOS
ANDRÉS SEBASTIÁN DÁVALOS MORENO
DIRECTOR: Ing. EDWIN PLÚAS, MSc
Quito, Junio 2016

© Universidad Tecnológica Equinoccial. 2016
Reservados todos los derechos de reproducción
FORMULARIO DE REGISTRO BIBLIOGRÁFICO
PROYECTO DE TITULACIÓN
DATOS DE CONTACTO
CÉDULA DE IDENTIDAD: 171715051-8
APELLIDO Y NOMBRES: Andrés Sebastián Dávalos Moreno
DIRECCIÓN: Manuel Valdivieso Oe3-109
EMAIL: [email protected]
TELÉFONO FIJO: 5105602
TELÉFONO MOVIL: 0958708954
DATOS DE LA OBRA
TITULO: Análisis de uso de Herramientas
MWD y LWD en combinación con
Sistemas Rotativos Orientables
RSS, como un Sistema de
Optimización de la Perforación en
Pozos del Oriente ecuatoriano.
AUTOR O AUTORES: Andrés Sebastián Dávalos Moreno
FECHA DE ENTREGA DEL
PROYECTO DE TITULACIÓN:
2 de Junio del 2016
DIRECTOR DEL PROYECTO DE
TITULACIÓN:
Ing. Edwin Plúas Novilos MSc.
PROGRAMA PREGRADO POSGRADO
TITULO POR EL QUE OPTA: Ingeniero de Petróleos
RESUMEN: Mínimo 250 palabras
El presente trabajo de titulación es
referido a un análisis de la
perforación de dos pozos

direccionales Tipo “S”, del campo
Shushufindi, en los que se utilizó
como herramienta direccional los
Sistemas Rotativos Orientables
(RSS) y como herramienta de
medición el Sistema MWD.
El análisis está enfocado en
determinar el ahorro del tiempo de
operaciones de perforación con el
uso de este tipo de herramientas, a
su vez determinar el cumplimiento
de la trayectoria diseñada y la
evaluación de los problemas
ocurridos durante la perforación.
En el análisis de tiempos se evalúa
los tiempos productivos, los tiempos
no productivos (NPT) y el ahorro del
tiempo de operaciones de acuerdo
al plan diseñado. En la evaluación
del cumplimiento de la trayectoria
se analizan los topes de las
formaciones que atraviesan cada
pozo y la trayectoria final perforada.
En la evaluación de los problemas
ocurridos durante la perforación se
analiza como los sistemas (RSS)
evitan posibles fallas, como
empaquetamiento y pega de
tubería.
PALABRAS CLAVES: RSS
Perforación Direccional
Trayectoria
Tiempos Productivos
Tiempos no Productivos
ABSTRACT:
This work degree is based on an
analysis of the drilling of two
directional wells type "S" of
Shushufindi field, which was used
like a directional tool Systems
Rotary Steerable (RSS) and like a
tool for measuring the MWD system.
The analysis is focused on
determining the time savings of
drilling operations using these tools,
in turn determine compliance path
designed and evaluation of the
problems occurred during drilling.
In the analysis time is evaluated
productive time, non-productive time
(NPT) and time saving operations
designed according to plan. In
assessing compliance path it’s
analyzed stops formations that
cross each well and the final
perforated trajectory. In assessing
the problems occurred during drilling
is analyzed like (RSS) systems
avoid possible failures, such as
packaging and stuck pipe.
KEYWORDS
RSS
Directional Drilling
Path
Production Times
Non Production Times
Se autoriza la publicación de este Proyecto de Titulación en el Repositorio
Digital de la Institución.
______________________________________
Andrés Sebastián Dávalos Moreno
C.I. 0802763276
DECLARACIÓN Y AUTORIZACIÓN
Yo ANDRÉS SEBASTIÁN DÁVALOS MORENO, C.I. 0802763276
autor del proyecto titulado Análisis de uso de Herramientas MWD y
LWD en combinación con Sistemas Rotativos Orientables RSS,
como un Método de Optimización de la Perforación en Pozos del
Oriente Ecuatoriano, previo a la obtención del título de INGENIERO
DE PETRÓLEOS en la Universidad Tecnológica Equinoccial.
1. Declaro tener pleno conocimiento de la obligación que tienen
las Instituciones de Educación Superior, de conformidad con el
Artículo 144 de la Ley Orgánica de Educación Superior, de
entregar a la SENESCYT en formato digital una copia del
referido trabajo de graduación para que sea integrado al
Sistema Nacional de información de la Educación Superior del
Ecuador para su difusión pública respetando los derechos de
autor.
2. Autorizo a la BIBLIOTECA de la Universidad Tecnológica
Equinoccial a tener una copia del referido trabajo de
graduación con el propósito de generar un Repositorio que
democratice la información, respetando las políticas de
propiedad intelectual vigentes.
Quito 2 de Junio del 2016.
Andrés Sebastián Dávalos Moreno
C.I. 0802763276
DECLARACIÓN
Yo ANDRÉS SEBASTIÁN DÁVALOS MORENO declaro que el
trabajo aquí descrito es de mi autoría; que no ha sido previamente
presentado para ningún grado o calificación profesional; y, que he
consultado las referencias bibliográficas que se incluyen en este
documento.
La Universidad Tecnológica Equinoccial puede hacer uso de los
derechos correspondientes a este trabajo, según lo establecido por la
Ley de Propiedad Intelectual, por su Reglamento y por la normativa
institucional vigente.
Andrés Sebastián Dávalos Moreno
C.I. 0802763276
CERTIFICACIÓN
Certifico que el presente trabajo que lleva por título “Análisis del uso de
Herramientas MWD y LWD en combinación con Sistemas Rotativos
Orientables RSS, como un sistema de Optimización de la Perforación
en Pozos del Oriente Ecuatoriano”, que para aspirar al título de Ingeniero
de Petróleos fue desarrollado por Andrés Sebastián Dávalos Moreno.,
bajo mi dirección y supervisión, en la Facultad de Ciencias de la Ingeniería e
Industrias, y cumple con las condiciones requeridas por el reglamento de
Trabajos de Titulación artículo 19, 27 y 28.
Ing. Edwin Plúas Novilos MSc.
DIRECTOR DEL TRABAJO
C.I. 1708903057

DEDICATORIA
A mi Mamá Normita por todas sus enseñanzas.
A mi Papá Ramiro que ha sido mi soporte en todo momento.
A mis hermanos Agustín y Vladimir por brindarme todo su conocimiento y
ayuda en aspectos relacionados con la Industria.
Y todas las personas que confiaron en mí.
AGRADECIMIENTO
Al Ing. Patricio Jaramillo por su conocimiento y confianza brindada.
Al Ing. Edwin Pluas por toda la ayuda brindada.
Al Ing. Fausto Ramos por los conocimientos y ayuda brindada a lo largo de
mi Carrera Universitaria.
A todos mis profesores por ayudarme a forjar mi carrera.

I
ÍNDICE DE CONTENIDOS
PÁGINA
RESUMEN .................................................................................................... XI
ABSTRACT .................................................................................................. XII
1 INTRODUCCIÓN .................................................................................... 1
1.1 PROBLEMA ...................................................................................... 2
1.2 JUSTIFICACIÓN ............................................................................... 2
1.3 OBJETIVOS DEL PROYECTO ......................................................... 3
1.3.1 OBJETIVO GENERAL. .............................................................. 3
1.3.2 OBJETIVOS ESPECÍFICOS. ..................................................... 3
2 MARCO TEÓRICO .................................................................................. 4
2.1 PERFORACIÓN DIRECCIONAL ...................................................... 4
2.1.1 CRITERIOS DE DISEÑO DEL POZO. ....................................... 4
2.2 COLUMNA ESTRATIGRÁFICA DE LA CUENCA ORIENTE ............ 5
2.3 MÉTODOS DE ESTUDIOS DIRECCIONALES ................................ 6
2.3.1 MÉTODO TANGENCIAL. ........................................................... 6
2.3.2 MÉTODO DE ÁNGULO PROMEDIO. ........................................ 7
2.3.3 MÉTODO DE CURVATURA MÍNIMA. ....................................... 9
2.4 PARAMETROS DE PERFORACIÓN.............................................. 10
2.5 PRNCIPIOS DE ANTICOLISIÓN .................................................... 10
2.5.1 MÉTODOS DE ANÁLISIS DE PROXIMIDAD. ......................... 10
2.5.1.1 Plano normal ...................................................................... 11
2.5.1.2 Distancia menor tridimensional .......................................... 11
2.5.2 POZOS VECINOS. ................................................................... 11
2.6 ENSAMBLAJES DE FONDO .......................................................... 12
2.7 MEDICIÓN EN TIEMPO REAL MWD ............................................. 12

II
2.7.1 PRINCIPIOS DE FUNCIONAMIENTO. .................................... 12
2.7.2 MEDICIONES........................................................................... 13
2.7.3 COMPONENTES DEL SISTEMA EN SUPERFICIE. ............... 13
2.7.4 LOS SENSORES DEL POZO. ................................................. 14
2.7.5 SENSORES DE PERFORACIÓN DIRECCIONAL Y
PERFORACIÓN MECÁNICA. ............................................................... 14
2.8 REGISTRO DURANTE LA PERFORACIÓN LWD (LOGGIG WHILE
DRILLING) ................................................................................................ 15
2.8.1 USOS DE LA HERRAMIENTA. ................................................ 15
2.9 MÉTODOS DE DESVIACIÓN ......................................................... 15
2.9.1 EL MÉTODO DE LA CUCHARA DESVIADORA. ..................... 15
2.9.2 DESVIACIÓN POR CHORRO DE LA BROCA......................... 17
2.9.3 MOTORES DE DESPLAZAMIENTO POSITIVO. ..................... 18
2.9.4 SITEMAS ROTATIVOS ORIENTABLES. ................................ 19
2.10 SISTEMAS ROTATIVOS ORIENTABLES RSS (ROTARY
STEERABLE SISTEM) ............................................................................. 19
2.10.1 PRINCIPIO DE FUNCIONAMIENTO. ................................... 20
2.10.2 METODOS DE NAVEGACIÓN. ............................................ 21
2.10.2.1 Push the bit. ....................................................................... 21
2.10.2.2 Point the bit. ....................................................................... 21
2.10.3 VENTAJAS DEL SISTEMA RSS. ......................................... 22
2.11 FALLAS PRESENTES EN LA SARTA DE PERFORACIÓN ....... 22
2.12 PROBLEMAS EN LA PERFORACIÓN ........................................ 22
3 METODOLOGÍA .................................................................................... 24
3.1 RECOLECCION DE DATOS .......................................................... 24
3.2 INFORMACION GENERAL DEL LOS POZOS ............................... 24
3.2.1 INFORMACION GENERAL DEL POZO A. .............................. 24

III
3.2.2 INFORMACION GENERAL DEL POZO A. .............................. 24
3.3 ANÁLISIS LITOLÓGICO ................................................................. 25
3.3.1 DESCRIPCIÓN LITOLÓGICA LOCAL. .................................... 25
3.3.2 TOPES DE LAS FORMACIONES Y PRESIÓN DE
YACIMIENTO. ....................................................................................... 26
3.3.2.1 Topes de las Formaciones y Presión de Yacimiento del pozo
A 27
3.3.2.2 Topes de las Formaciones y Presión de Yacimiento del pozo
B 28
3.4 PLAN DIRECCIONAL ..................................................................... 29
3.4.1 PLAN DIRECCIONAL DEL POZO A. ....................................... 29
3.4.2 PLAN DIRECCIONAL DEL POZO B. ....................................... 30
3.5 VISTA VERTICAL ........................................................................... 31
3.5.1 VISTA VERTICAL DEL POZO A. ............................................. 31
3.5.2 VISTA VERTICAL DEL POZO B. ............................................. 32
3.6 VISTA EN PLANTA ........................................................................ 33
3.6.1 VISTA EN PLANTA DEL POZO A............................................ 33
3.6.2 VISTA EN PLANTA DEL POZO B............................................ 34
3.7 POZOS VECINOS Y ANTICOLISIÓN............................................. 35
3.7.1 PARA EL POZO A. ................................................................... 35
3.7.2 PARA EL POZO B. ................................................................... 35
3.8 ENSAMBLAJES DE FONDO .......................................................... 35
4 ANÁLISIS E INTERPRETACIÓN DE RESULTADOS .......................... 36
4.1 ANÁLISIS POR SECCIONES ............................................................. 36
4.1.1 SECCIONES DEL POZO A. ..................................................... 36
4.1.1.1 Sección conductora, 26 pulgadas. ..................................... 36
4.1.1.2 Sección superficial, 16 pulgadas. ...................................... 36
IV
4.1.1.3 Sección intermedia, 12 ¼ pulgadas. .................................. 37
4.1.1.4 Sección de producción 8 ½ pulgadas. ............................... 39
4.1.2 SECCIONES DEL PÒZO B ...................................................... 40
4.1.2.1 Sección conductora, 26 pulgadas. ..................................... 40
4.1.2.2 Sección superficial, 16 pulgadas. ...................................... 40
4.1.2.3 Sección intermedia, 12 ¼ pulgadas. .................................. 42
4.1.2.4 Sección de producción 8 ½ pulgadas. ............................... 43
4.2 ANÁLISIS DE PROBLEMAS DURANTE LA PERFORACIÓN ........ 44
4.2.1 PROBLEMAS DURANTE LA PERFORACIÓN DEL POZO A .. 44
4.2.2 PROBLEMAS DURANTE LA PERFORACIÓN DEL POZO B .. 45
4.3 ESQUEMA MECÁNICO DEL POZO............................................... 46
4.3.1 ESQUEMA MECÁNICO DELPOZO A ...................................... 46
4.3.2 ESQUEMA MECÁNICO DEL POZO B ..................................... 47
4.4 CURVA DE TIEMPO VS PROFUNDIDAD ...................................... 48
4.4.1 CURVA DE TIEMPO VS PROFUNDIDAD DEL POZO A. ........ 48
4.4.2 CURVA DE TIEMPO VS PROFUNDIDAD DEL POZO B ......... 49
4.5 ANÁLISIS DE TIEMPOS POR ETAPAS ......................................... 50
4.5.1 ANÁLISIS DE TIEMPOS DEL POZO A .................................... 50
4.5.2 ANÁLISIS DE TIEMPOS DEL POZO B .................................... 51
4.6 TIEMPOS NO PRODUCTIVOS ...................................................... 52
4.6.1 ANÁLISIS DE TIEMPOS NO PRODUCTIVOS DEL POZO A. . 52
4.6.2 ANÁLISIS DE TIEMPOS NO PRODUCTIVOS DEL POZO B . 53
4.7 DISTRIBUCION DE TIEMPOS ....................................................... 53
4.7.1 DISTRIBUCIÓN DE TIEMPOS DEL POZO A .......................... 53
4.7.2 DISTRIBUCIÓN DE TIEMPOS DEL POZO B. ......................... 54
4.8 PLAN DIRECCIONAL VS PLAN REAL ........................................... 55

V
4.8.1 TOPES FORMACIONALES DEL POZO A ............................... 55
4.8.2 TOPES FORMACIONALES DEL POZO B ............................... 56
4.9 VISTA VERTICAL ........................................................................... 57
4.9.1 VISTA VERTICAL DEL POZO A .............................................. 57
4.9.2 VISTA VERTICAL DEL POZO B .............................................. 58
4.10 VISTA EN PLANTA ..................................................................... 59
4.10.1 VISTA EN PLANTA DEL POZO A ........................................ 59
4.10.2 VISTA PLANTA DEL POZO B .............................................. 60
4.11 INDICADORES DE RENDIMIENTO ............................................ 61
4.11.1 RENDIMIENTO DEL POZO A .............................................. 61
4.11.2 RENDIMIENTO DEL POZO B .............................................. 62
5 CONCLUSIONES Y RECOMENDACIONES ........................................ 64
5.1 CONCLUSIONES ........................................................................... 64
5.2 RECOMENDACIONES ................................................................... 65
6 NOMENCLATURA O GLOSARIO ......................................................... 66
7 BIBLIOGRAFÍA ..................................................................................... 68
8 ANEXOS ............................................................................................... 70
VI
ÍNDICE DE TABLAS
PÁGINA
Tabla 1. Descripción litológica del campo Shushufindi ................................ 25
Tabla 2. Topes de las Formaciones y Presión de Yacimiento del pozo A. .. 27
Tabla 3. Topes de las Formaciones y Presión de Yacimiento del pozo B. .. 28
Tabla 4. Análisis de tiempos por etapas del pozo A. ................................... 50
Tabla 5. Análisis de tiempos por etapas del pozo B. ................................... 51
Tabla 6. Análisis de los topes de formacionales del pozo A. ....................... 55
Tabla 7. Análisis de los topes formacionales del pozo B. ............................ 56
VII
ÍNDICE DE FIGURAS
PÁGINA
Figura 1. Columna estratigráfica de la Cuenca Oriente ................................ 5
Figura 2. Método Tangencial......................................................................... 6
Figura 3. Método del ángulo promedio ......................................................... 7
Figura 4. Método de curvatura mínima ......................................................... 9
Figura 5. Grafico araña a gran escala ......................................................... 12
Figura 6. Principios de funcionamiento del MWD. ....................................... 13
Figura 7. Método de la cuchara desviadora. ............................................... 16
Figura 8. Desviación por chorro ................................................................. 17
Figura 9. BHA Típico para PDM .................................................................. 18
Figura 10. Ensamblaje típico de un sistema RSS. ...................................... 19
Figura 11. Sistema Rotativo Orientable ...................................................... 21
Figura 12. Vista en Vertical del plan direccional del pozo A. ....................... 31
Figura 13. Vista en Vertical del plan direccional del pozo B. ....................... 32
Figura 14. Vista en Planta del plan direccional del pozo A. ........................ 33
Figura 15. Vista en Planta del plan direccional del pozo B. ........................ 34
Figura 16. Esquema mecánico del Pozo A. ................................................ 46
Figura 17. Esquema Mecánico del Pozo B ................................................. 47
Figura 18. Tiempo VS Profundidad de la perforación del pozo A................ 48
Figura 19. Tiempo VS Profundidad de la perforación del pozo B.............. 49
Figura 20. ROP por formación en la última sección del pozo A. ................. 50
Figura 21. ROP por formación en la última sección del pozo B. ................. 52
Figura 22. Tiempos no Productivos del Pozo A .......................................... 52
Figura 23. Tiempos no Productivos del Pozo B ......................................... 53
Figura 24. Distribución del tiempo de operación en la perforación del pozo A.
..................................................................................................................... 53
Figura 25. Distribución del tiempo de operación en la perforación del pozo B.
..................................................................................................................... 54
Figura 26. Vista Vertical del pozo A. ........................................................... 57
Figura 27. Vista Vertical del pozo B. ........................................................... 58
VIII
Figura 28. Vista en Planta del pozo A. ....................................................... 59
Figura 29. Vista en Planta del pozo B. ........................................................ 60
Figura 30. Velocidad de perforación por secciones del pozo A .................. 61
Figura 31. Comparación del tiempo total de perforación del pozo A con otros
similares del mismo campo. ......................................................................... 62
Figura 32. Velocidad de perforación por secciones del pozo B .................. 62
Figura 33. Comparación del tiempo total de perforación del pozo B con otros
similares del mismo campo. ......................................................................... 63
IX
ÍNDICE DE ECUACIONES
PÁGINA
Ecuacion 1. Cálculo de la profundidad vertical verdadera con la inclinación
del pozo. ...................................................................................................... 6
Ecuacion 2. Cálculo del desplazamiento horizontal con la inclinación del
pozo ............................................................................................................... 6
Ecuacion 3. Cálculo de la profundidad vertical verdadera con la inclinación
promedio de dos puntos de registro ............................................................... 7
Ecuacion 4. Cálculo del desplazamiento horizontal con la inclinación
promedio de dos puntos de registro ............................................................... 8
Ecuacion 5. Cálculo de la Inclinación promedio de dos puntos de registro .. 8
Ecuacion 6. Cálculo del Desplazamiento Norte-Sur. .................................... 8
Ecuacion 7. Cálculo del Azimut promedio de dos puntos de registro ........... 8
Ecuacion 8. Cálculo del Desplazamiento Este-Oeste ................................... 8
Ecuacion 9. Cálculo de la “Pata de Perro” ................................................... 9
Ecuacion 10. Cálculo del factor de suavización de la curva ....................... 10
Ecuacion 11. Cálculo de la “Severidad de Pata de Perro” .......................... 10
X
ÍNDICE DE ANEXOS
PÁGINA
Anexos 1. BHA Nº2 para el Pozo A ............................................................ 70
Anexos 2. BHA Nº3 para el Pozo A ............................................................ 71
Anexos 3. BHA Nº4 para el Pozo A ............................................................ 72
Anexos 4. BHA Nº5 para el Pozo A ............................................................ 73
Anexos 5. BHA Nº2 para el Pozo B. ........................................................... 74
Anexos 6. BHA Nº3 para el Pozo B. ........................................................... 75
Anexos 7. BHA Nº4 para el Pozo B. ........................................................... 76

XI
RESUMEN
El presente trabajo de titulación es referido a un análisis de la perforación de
dos pozos direccionales Tipo “S”, del campo Shushufindi, en los que se
utilizó como herramienta direccional los Sistemas Rotativos Orientables
(RSS) y como herramienta de medición el Sistema MWD.
El análisis está enfocado en determinar el ahorro del tiempo de operaciones
de perforación con el uso de este tipo de herramientas, a su vez determinar
el cumplimiento de la trayectoria diseñada y la evaluación de los problemas
ocurridos durante la perforación.
En el análisis de tiempos se evalúa los tiempos productivos, los tiempos no
productivos (NPT) y el ahorro del tiempo de operaciones de acuerdo al plan
diseñado. En la evaluación del cumplimiento de la trayectoria se analizan los
topes de las formaciones que atraviesan cada pozo y la trayectoria final
perforada. En la evaluación de los problemas ocurridos durante la
perforación se analiza como los sistemas (RSS) evitan posibles fallas, como
empaquetamiento y pega de tubería.

XII
ABSTRACT
This work degree is based on an analysis of the drilling of two directional
wells type "S" of Shushufindi field, which was used like a directional tool
Systems Rotary Steerable (RSS) and like a tool for measuring the MWD
system.
The analysis is focused on determining the time savings of drilling operations
using these tools, in turn determine compliance path designed and evaluation
of the problems occurred during drilling.
In the analysis time is evaluated productive time, non-productive time (NPT)
and time saving operations designed according to plan. In assessing
compliance path it’s analyzed stops formations that cross each well and the
final perforated trajectory. In assessing the problems occurred during drilling
is analyzed like (RSS) systems avoid possible failures, such as packaging
and stuck pipe.

1
CAPITULO I
1 INTRODUCCIÓN
Los datos que se obtienen durante la perforación son de gran utilidad para
la todas las operaciones de perforación direccional, correlaciones de pozos
vecinos, estimación de reservas y cálculos de parámetros de las
formaciones.
Los sistemas rotativos orientables desarrollados inicialmente para perforar
pozos de alcance extendido, también resultan efectivos en costos para
aplicaciones de perforación convencional, ya que permiten reducir el tiempo
de perforación en forma considerable.
Los sistemas RSS son ideales para situaciones que requieren el uso de
tecnología de perforación avanzada. La geología local puede determinar una
trayectoria complicada para un pozo. El espacio reducido entre pozos
requiere de gran precisión al momento de cumplir una trayectoria.
Los pozos de alcance extendido se convierten en una alternativa para
explotar yacimientos que no se podrían explotar de otra manera sin incurrir
costos o riesgos ambientales inaceptables. La perforación en racimos hace
posible alcanzar varios sitios de drenaje en un yacimiento desde una misma
locación.
La combinación de herramientas MWD y LWD con los sistemas rotativos
orientables RSS, logran una mayor eficiencia de los procesos de perforación,
reduciendo la probabilidad de ocurrencia de problemas durante la
perforación ya que se monitorea y se realiza las correcciones pertinentes en
tiempo real.
2
1.1 PROBLEMA
Las variaciones litológicas y otros parámetros influyen en la posibilidad de
lograr la trayectoria de perforación planeada. La formación de “patas de
perro” ocasiona trayectorias tortuosas dificultando la bajada de los
revestidores. El mayor problema que se presenta en la perforación por
deslizamiento convencional es la tendencia de la columna no rotativa a sufrir
atrapamientos. Durante los periodos de perforación por deslizamiento, la
tubería de perforación se apoya sobre el lado inferior del hoyo, lo cual
produce velocidades disparejas del fluido alrededor de la tubería. Por otra
parte, la falta de rotación de la tubería disminuye la capacidad del fluido de
perforación para remover recortes haciendo posible la formación de un
colchón de recortes en el fondo del hoyo. La perforación en el modo de
deslizamiento disminuye la potencia disponible para hacer girar la broca, lo
cual, sumado a la fricción de deslizamiento reduce la tasa de penetración
(ROP). Y finalmente en perforaciones de gran alcance, las fuerzas de
fricción durante el deslizamiento se acumulan hasta un punto en que el peso
axial resulta insuficiente para hacer frente al arrastre de la tubería de
perforación.
1.2 JUSTIFICACIÓN
En la actualidad la necesidad de perforar nuevos pozos para la extracción de
petróleo, estratigrafías complejas y los nuevos requerimientos ambientales,
hacen de la perforación de pozos, un reto cada vez más difícil.
La aplicación de nuevas tecnologías reduce significativamente la
probabilidad de problemas durante la perforación, evitando tiempos no
productivos, que a más de aumentar el tiempo total de la perforación
aumentan los costos de la perforación de un pozo. Además hace posible
alcanzar nuevos objetivos que serían prácticamente imposibles con
herramientas convencionales.

3
Se podría incrementar el drenaje de un pozo en particular extendiendo la
penetración en el reservorio o con la construcción de pozos con múltiples
tramos laterales que por lo general drena varios compartimientos del
reservorio.
En los campos maduros, los compartimientos pequeños también pueden ser
productivos en forma económica si los pozos direccionales se encuentran
ubicados de manera adecuada.
1.3 OBJETIVOS DEL PROYECTO
1.3.1 OBJETIVO GENERAL.
Analizar los procesos de perforación direccional con el uso de los Sistemas
Rotativos Orientables RSS, en pozos de la Cuenca Oriente.
1.3.2 OBJETIVOS ESPECÍFICOS.
Identificar zonas y los problemas ocurridos durante la perforación de
los pozos estudiados de la Cuenca Oriente.
Evaluar el cumplimiento de las trayectorias de perforación
planificadas.
Evaluar la reducción del tiempo de perforación con la utilización de
estas técnicas.

4
CAPITULO II
2 MARCO TEÓRICO
2.1 PERFORACIÓN DIRECCIONAL
Es el esfuerzo de ingeniería para desviar un agujero a lo largo de una
trayectoria planeada hacia un objetivo a cierta profundidad en el subsuelo,
cuya ubicación está a una distancia lateral dada y en una dirección definida,
a partir de la posición superficial.1
2.1.1 CRITERIOS DE DISEÑO DEL POZO.
El diseño de los pozos se los realiza con el fin de encontrar el mejor
escenario desde el punto de vista operativo de perforación direccional,
cumpliendo con los objetivos dentro de la zona productora y acorde a las
disposiciones medioambientales estipuladas por el organismo de control. El
objetivo planificado se lo realiza con una tolerancia de 50 ft de radio.
1 SCHLUMBERGER, Fundamentos de Perforación Direccional, pág. 8
5
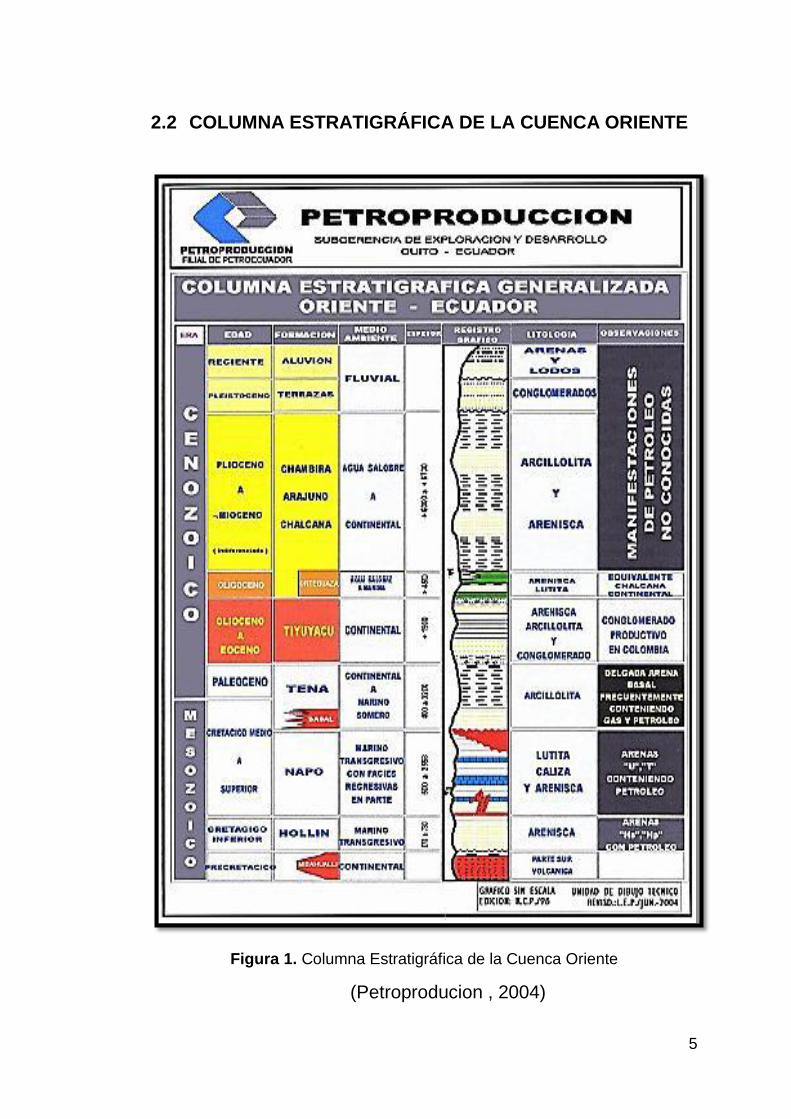
2.2 COLUMNA ESTRATIGRÁFICA DE LA CUENCA ORIENTE
Figura 1. Columna Estratigráfica de la Cuenca Oriente
(Petroproducion , 2004)
6
2.3 MÉTODOS DE ESTUDIOS DIRECCIONALES
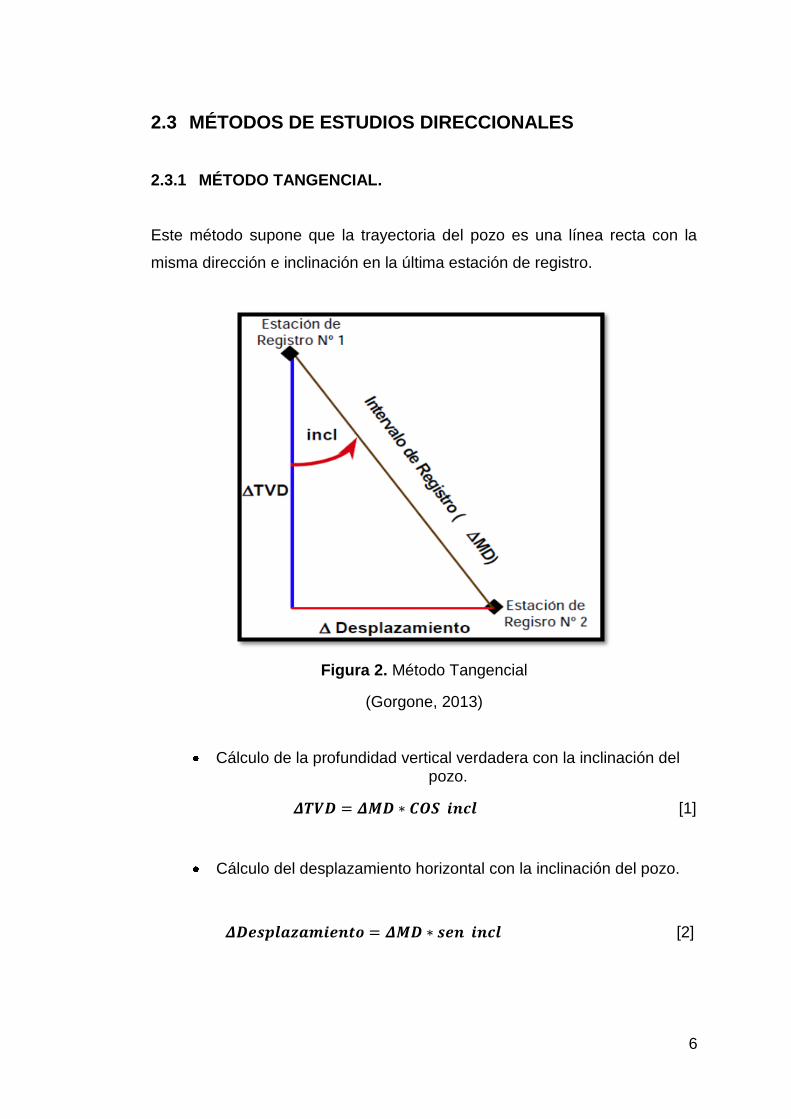
2.3.1 MÉTODO TANGENCIAL.
Este método supone que la trayectoria del pozo es una línea recta con la
misma dirección e inclinación en la última estación de registro.
Figura 2. Método Tangencial
(Gorgone, 2013)
Cálculo de la profundidad vertical verdadera con la inclinación del pozo.
[1]
Cálculo del desplazamiento horizontal con la inclinación del pozo.
[2]

7
2.3.2 MÉTODO DE ÁNGULO PROMEDIO.
Este método supone que la trayectoria del pozo es una línea recta cuya
inclinación y dirección son el promedio entre las medidas registradas en la
estación presente (Nº2) y la estación anterior (Nº1).
Figura 3. Método del ángulo promedio
(Gorgone, 2013)
Cálculo de la profundidad vertical verdadera con la inclinación
promedio de dos puntos de registro.
[3]
8
Cálculo del desplazamiento horizontal con la inclinación promedio de
dos puntos de registro.
[4]
Cálculo de la Inclinación promedio de dos puntos de registro.
[5]
Cálculo del Desplazamiento Norte-Sur
[ 6]
Cálculo del Azimut promedio de dos puntos de registro.
[7]
Cálculo del Desplazamiento Este-Oeste
[8]
Dónde:
I1 e I2= Inclinación en los puntos de registro
Iprom= Inclinación promedio
A1 y A2= Azimut en los puntos de registro
Aprom= Azimut promedio
MD= Profundidad Medida
TVD= Profundidad vertical verdadera
9
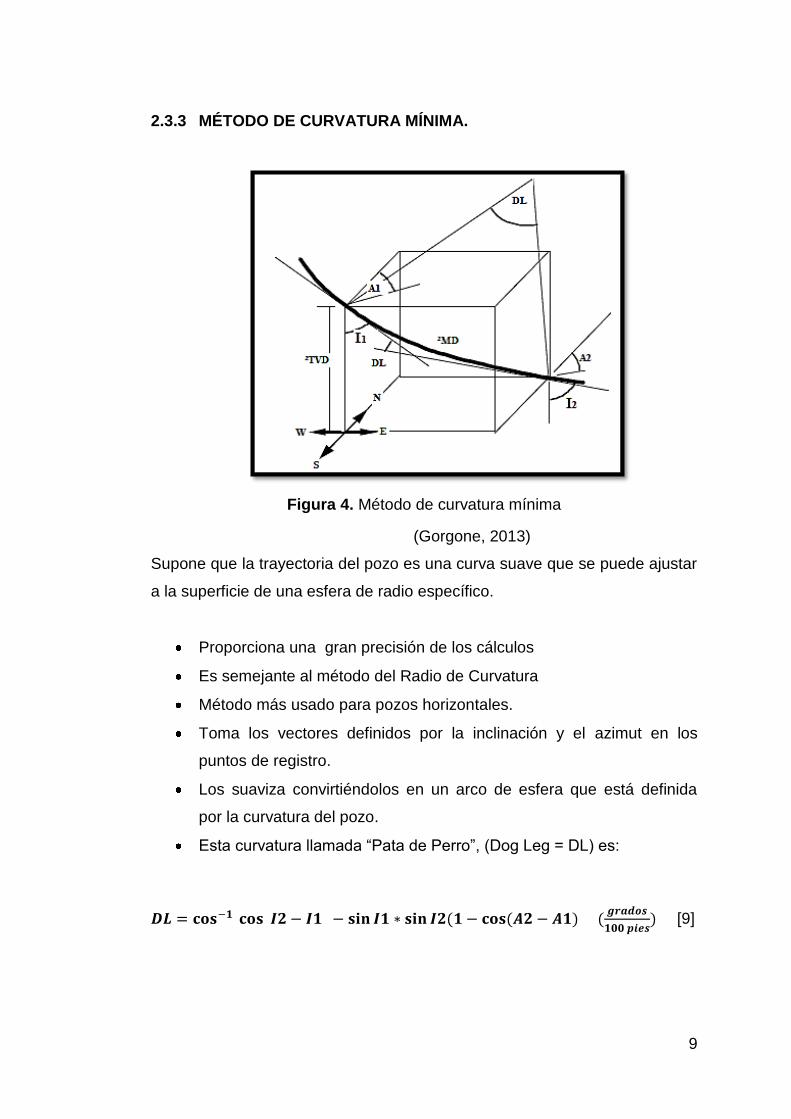
2.3.3 MÉTODO DE CURVATURA MÍNIMA.
Figura 4. Método de curvatura mínima
(Gorgone, 2013)
Supone que la trayectoria del pozo es una curva suave que se puede ajustar
a la superficie de una esfera de radio específico.
Proporciona una gran precisión de los cálculos
Es semejante al método del Radio de Curvatura
Método más usado para pozos horizontales.
Toma los vectores definidos por la inclinación y el azimut en los
puntos de registro.
Los suaviza convirtiéndolos en un arco de esfera que está definida
por la curvatura del pozo.
Esta curvatura llamada “Pata de Perro”, (Dog Leg = DL) es:
[9]

10
Un factor de relación, RF suaviza las dos líneas rectas definidas por la
inclinación y el azimut en los puntos de registro:
[10]
Cálculo de la severidad de “Pata de perro”.
[11]
2.4 PARAMETROS DE PERFORACIÓN
Galonaje
Peso sobre la broca (WOB)
Torque
Presión diferencial
Tasa de penetración
2.5 PRNCIPIOS DE ANTICOLISIÓN
2.5.1 MÉTODOS DE ANÁLISIS DE PROXIMIDAD.
El análisis de proximidad proporciona los siguientes tres métodos estándar
para calcular las distancias de separación entre el pozo sujeto y el(los)
pozo(s) de correlación:

11
Plano normal
Plano horizontal (no es muy útil)
Distancia menor tridimensional
2.5.1.1 Plano normal
El método de plano normal de cálculo desciende a lo largo del pozo
que se perfora, En cada paso (intervalo) del registro del pozo de
Correlación, este método busca anticolisión en un plano normal con el
registro del pozo sujeto en el punto de intervalo. (SCHLUMBERGER,
2013)
2.5.1.2 Distancia menor tridimensional
El método de distancia menor tridimensional es idéntico
algorítmicamente al método de plano normal; sin embargo, invierte los
papeles entre el pozo sujeto y el pozo de correlación.
(SCHLUMBERGER, 2013)
2.5.2 POZOS VECINOS.
La Colisión con pozos vecinos puede ser un problema cuando se perforan
varios pozos desde una locación en superficie. Esto es especialmente cierto
cuando los pozos adyacentes están produciendo y la colisión podría dar
lugar a una situación extremadamente peligrosa. La planificación anticolisión
se detallan y grafican en mapas conocidos como gráficas “araña”, estas
gráficas se utilizan para asignar cuidadosamente la relación de la propuesta
del nuevo pozo a todos los pozos existentes y a futuros pozos propuestos.

12
Figura 5. Grafico araña a gran escala
(Schlumberger, Direcctional Drilling Training Manual, 2009)
2.6 ENSAMBLAJES DE FONDO
Constituyen el conjunto de herramientas de fondo de pozo utilizadas durante
la perforación. La configuración y posición de las herramientas dependen
específicamente del diseño de la trayectoria del pozo, de la profundidad del
pozo y del tipo de formación a perforar.
2.7 MEDICIÓN EN TIEMPO REAL MWD
2.7.1 PRINCIPIOS DE FUNCIONAMIENTO.
La Herramienta toma los datos en el fondo, los datos son transmitidos en
forma de pulsos de lodo, los sensores convierten los pulsos en señales
eléctricas, el equipo de superficie decodifica la información de los sensores,
entrega los registros y datos direccionales al cliente.

13
Figura 6. Principios de funcionamiento del MWD.
(SCHLUMBERGER, 2014)
2.7.2 MEDICIONES.
Todas las herramientas MWD proporcionan los mismos datos como lo son:
Inclinación del pozo (Ángulo) y el rumbo (Azimut). Además de estos registros
proporcionan diferentes medidas, entre las cuales se destacan: la
temperatura en el fondo del pozo, presión, choques, vibraciones, y
parámetros de evaluación de formaciones LWD.
2.7.3 COMPONENTES DEL SISTEMA EN SUPERFICIE.
Sensores de superficie para medición de parámetros de perforación,
como la profundidad del pozo.
14
Transductor de presión en la superficie que recibe la señal de
medición de la herramienta MWD.
Una computadora en la superficie la cual se utiliza para decodificar los
datos enviados por medio de la herramienta
2.7.4 LOS SENSORES DEL POZO.
Los sensores del pozo de un equipo MWD se dividen en dos:
Sensores de profundidad, dirección e inclinación, temperatura y
presión.
Sensores LWD (Logging While Drilling) que son el conjunto de
sensores que toman registros para evaluar a la formación mientras se
está perforando.
2.7.5 SENSORES DE PERFORACIÓN DIRECCIONAL Y PERFORACIÓN
MECÁNICA.
Herramientas MWD también puede proporcionar información sobre las
condiciones de la sarta de perforación. Esto puede incluir:
Velocidad de rotación de la sarta de perforación.
Torque
Peso sobre la broca
Desgaste en la broca
RPM del motor
Tipo y gravedad de las vibraciones de fondo de pozo.
Par y de peso en bits, medidos cerca de la sarta de perforación.
Volumen de flujo de lodo.2
2 (Flores, 2013)
15
2.8 REGISTRO DURANTE LA PERFORACIÓN LWD (LOGGIG
WHILE DRILLING)
Las herramientas básicas que componen un sistema LWD son:
Densidad
Neutrón
Rayos gamma
Resistividad
Sónico
2.8.1 USOS DE LA HERRAMIENTA.
Condiciones que favorecen el uso del LWD:
Alto costo del equipo de perforación
Altos riesgos de perforación
Alto riesgo de fallar un objetivo muy delimitado
Interpretación Geológica estructural de un pozo de producción.3
2.9 MÉTODOS DE DESVIACIÓN
Los principales métodos de deviación usados en la perforación direccional
son:
2.9.1 EL MÉTODO DE LA CUCHARA DESVIADORA.
Este procedimiento se lo realiza con el hoyo limpio, donde se baja con el
BHA una cuchara desviadora, al llegar a la parte inferior del pozo la
3 (PDVSA, 2003)

16
circulación debe estar comenzada, la cara cóncava de la cuchara debe
estar orientada en la dirección deseada, la herramienta se fija en la parte
inferior mediante la aplicación de peso en superficie para romper el pasador
de seguridad.
Luego se baja la broca piloto por la cara de la cuchara y se perfora de
manera controlada alrededor de 30 pies o que ingrese en BHA completo.
Luego de esto se recupera la cuchara y se hace otro viaje con una broca de
calibre completo para continuar con la perforación.
Un ensamblaje típico para este método es:
La cuchara desviadora + broca piloto + estabilizador + pasador de fijación +
sub de orientación + collar no magnético.
Figura 7. Método de la cuchara desviadora.
(Schlumberger, Direcctional Drilling Training Manual, 2009)

17
2.9.2 DESVIACIÓN POR CHORRO DE LA BROCA.
Esta técnica se la realiza en formaciones blandas poco consolidadas, donde
se utiliza una tobera grande accionada y otras dos pequeñas no accionadas;
la boquilla grande representa la cara de la herramienta y debe estar
orientado en la dirección deseada. Se utiliza la tasa máxima de inyección
para la apertura del bolsillo, sin utilizar peso sobre la broca. Cuando se ha
perforado alrededor de 5 pies con esta técnica se va soltando peso de
manera que la broca siga la orientación del bolsillo.
Una configuración típica para este método es:
Una broca + boquilla de alto caudal + sub de orientación + pulsador de flujo
+ drill collar no magnético + estabilizador + drill collar + estabilizador.
Figura 8. Desviación por chorro
(Schlumberger, Direcctional Drilling Training Manual, 2009)
18
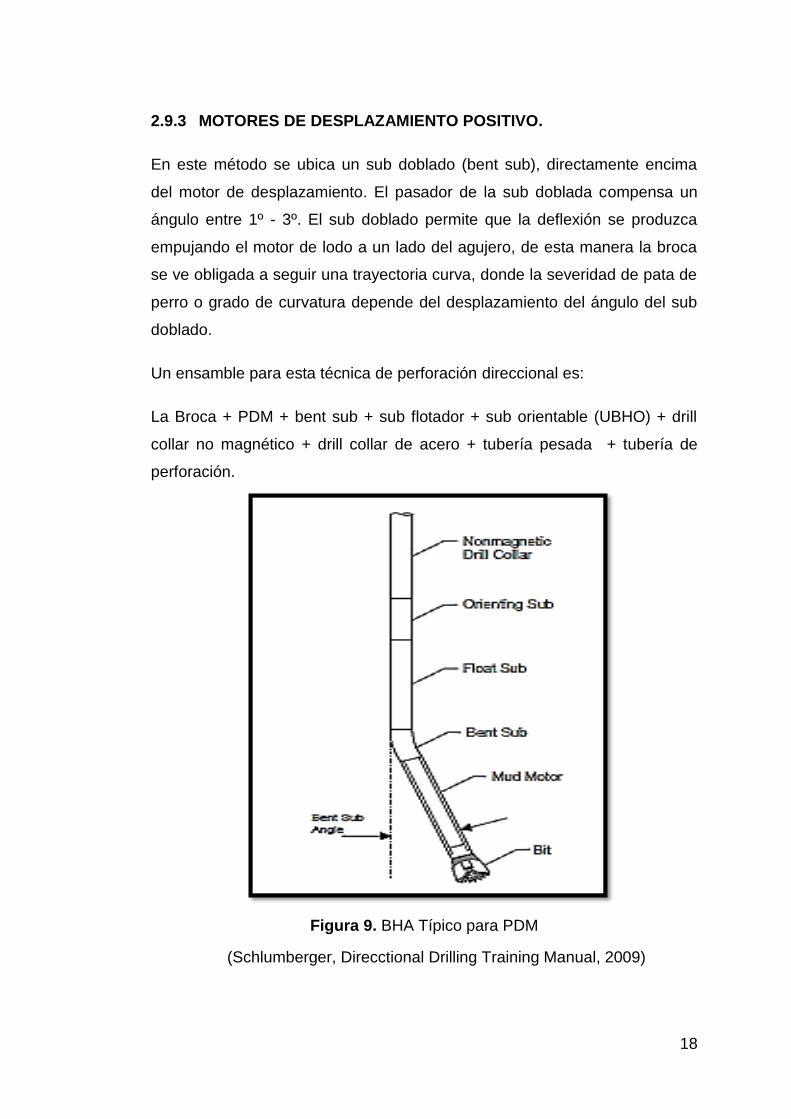
2.9.3 MOTORES DE DESPLAZAMIENTO POSITIVO.
En este método se ubica un sub doblado (bent sub), directamente encima
del motor de desplazamiento. El pasador de la sub doblada compensa un
ángulo entre 1º - 3º. El sub doblado permite que la deflexión se produzca
empujando el motor de lodo a un lado del agujero, de esta manera la broca
se ve obligada a seguir una trayectoria curva, donde la severidad de pata de
perro o grado de curvatura depende del desplazamiento del ángulo del sub
doblado.
Un ensamble para esta técnica de perforación direccional es:
La Broca + PDM + bent sub + sub flotador + sub orientable (UBHO) + drill
collar no magnético + drill collar de acero + tubería pesada + tubería de
perforación.
Figura 9. BHA Típico para PDM
(Schlumberger, Direcctional Drilling Training Manual, 2009)

19
2.9.4 SITEMAS ROTATIVOS ORIENTABLES.
En este método el BHA dirigible en 3D hace cambios en la inclinación y en el
azimut mientras está rotando en forma continua. La unidad de desviación
posee aletas movidas por pistones hidráulicos que aplican la fuerza lateral
necesaria para provocar la desviación a medida que gira a la velocidad de
esta.
Un ensamblaje típico para este sistema es:
Broca + RSS (unidad desviadora + motor dirigible + unidad de control) +
estabilizador + LWD resistivo + MWD + LWD nuclear
Figura 10. Ensamblaje típico de un sistema RSS.
(Gorgone, Nuevas Tecnologías de Perforación Direccional, 2013)
2.10 SISTEMAS ROTATIVOS ORIENTABLES RSS (ROTARY
STEERABLE SISTEM)
Un sistema rotativo orientable es una nueva forma de tecnología de
perforación utilizados en la perforación direccional y vertical. Se
emplea el uso de equipos especializados de fondo de pozo para
reemplazar a las herramientas convencionales de dirección tales
como los DHM+MWD.

20
Estos son generalmente programados por el ingeniero MWD o
perforador direccional que transmite comandos utilizando equipos de
superficie (normalmente utilizando las fluctuaciones de presión en la
columna de lodo). En otras palabras, una herramienta diseñada para
perforar direccionalmente con rotación continua desde la superficie,
eliminando la necesidad de deslizar un motor direccional.(Giordano,
2010)
2.10.1 PRINCIPIO DE FUNCIONAMIENTO.
El sistema RSS es un sistema compacto que comprende una unidad
sesgada y una unidad de control que agregan sólo 3,8m [12 1⁄2 pies]
a la longitud total del BHA.
La unidad sesgada, ubicada directamente detrás de la mecha, aplica
una fuerza sobre la mecha en una dirección controlada mientras toda
la columna gira. La unidad de control, que se encuentra detrás de la
unidad sesgada, contiene dispositivos electrónicos, sensores, y un
mecanismo de control que proporcionan la magnitud y la dirección
promedio de las cargas del lado de la mecha, necesarias para
alcanzar la trayectoria deseada.
El sistema RSS está ligado al sistema MWD y al conjunto de
sistemas de perfilaje durante la perforación LWD. (slb, 2010)

21
Figura 11. Sistema Rotativo Orientable
(DrillEng Group4 Directional Drilling, 2009)
2.10.2 MÉTODOS DE NAVEGACIÓN.
2.10.2.1 Push the bit.
Consiste en aplicar una fuerza lateral de empuje sobre la pared del pozo
para lograr dirigir el trépano en la dirección deseada.
Los trépanos utilizados con estos sistemas poseen calibres de mayor
longitud para aumentar a estabilidad y mejorar la calidad del pozo.
2.10.2.2 Point the bit.
Consiste en aplicar una fuerza, generada dentro de la herramienta, que
permita modificar la dirección del trépano en la trayectoria deseada (poseen
un ¨shaft interior¨ que produce la desviación en la trayectoria del trepano).
Los trépanos utilizados con estos sistemas normalmente requieren un área
de calibre inferior a los bits utilizados en aplicaciones de motores.
Esta reducción de la superficie lateral ofrece una mayor capacidad de
respuesta de dirección cuando la fuerza lateral se aplica.
22
2.10.3 VENTAJAS DEL SISTEMA RSS.
Como manifiesta (SCHLUMBERGER , 2012), las los sistemas rotativos
orientables ofrecen muchas ventajas al momento de ejecutar una trayectoria
planeada de un pozo.
Mejor limpieza de pozo. (La rotación continua de la sarta de
perforación permite mejoras en el transporte de recortes de
perforación)
Pozos menos tortuosos. (disminuye el promedio de DLS generados,
entregando pozos más lisos y suaves)
Menor torque y arrastre en la sarta.
ROP Mayor y Constante.
Puede ser utilizado en aplicaciones con altas RPM
Reduce el riesgo de quedarse atascado
Fácil instalación del casing
Reducción de la posibilidad de colisión con pozos verticales
adyacentes.
Reducción del costo de la perforación. (Pág 42)
2.11 FALLAS PRESENTES EN LA SARTA DE PERFORACIÓN
Las fallas presentes en la sarta de perforación se producen por: Fatiga, por
tensión, por torsión, por colapso y por ambientes con azufre.
2.12 PROBLEMAS EN LA PERFORACIÓN
Los problemas más comunes durante la perforación son:
Pérdida de circulación
Pega de tubería
Empaquetamiento

23
Pega diferencial
Geometría del Pozo
Hinchamiento de arcillas
Choques y vibraciones
Torsional
Axial
Lateral
Stick & Slip (Resbalón & atascón)
Tortuosidad en la trayectoria del pozo
Alto torque

24
CAPITULO III
3 METODOLOGÍA
3.1 RECOLECCION DE DATOS
Para el desarrollo del presente proyecto los datos se obtuvo a partir de:
Reportes de perforación de los pozos A y B los mismos que constituyen a
pozos perforados en el campo Shushufindi. También se generaron datos a
partir de los surveys registrados y de los puntos de asentamiento de los
revestidores.
3.2 INFORMACION GENERAL DEL LOS POZOS
3.2.1 INFORMACION GENERAL DEL POZO A.
Es un pozo de clasificación productor, tipo S que alcanza una MD de 10 340
pies y un TDV de 9 893pies, con una inclinación máxima de 29.5º y un
azimut de 195.05º. Las zonas de interés principal son: la U inferior y la T
inferior y los objetivos secundarios son: U superior, T superior y Basal Tena.
3.2.2 INFORMACION GENERAL DEL POZO A.
Es un pozo de clasificación productor, tipo S que alcanza una MD de 10 118
pies y un TDV de 9 331 pies, con una inclinación máxima de 26º y un azimut

25
de 266.62º. Las zonas de interés principal son: la U inferior y la T inferior y
los objetivos secundarios son: U superior, T superior.
3.3 ANÁLISIS LITOLÓGICO
3.3.1 DESCRIPCIÓN LITOLÓGICA LOCAL.
La descripción litológica se detalla a continuación, considerando el punto de
inicio de las trayectorias direccionales, para el pozo A, una MD de 1 850
pies y para el pozo B a una MD de 3 000 pies, en la sección de 16 pulgadas.
Tabla 1. Descripción litológica del campo Shushufindi

26
Continuación de la Tabla 1.
3.3.2 TOPES DE LAS FORMACIONES Y PRESION DE YACIMIENTO.
Los valores de los topes de las formaciones y presión de yacimiento indicado
para cada pozo se determinaron en base a estudios geofísicos y correlación
de pozos vecinos.

27
3.3.2.1 Topes de las Formaciones y Presión de Yacimiento del
pozo A
Tabla 2. Topes de las Formaciones y Presión de Yacimiento del pozo A.

28
Continuación de la Tabla 2.
3.3.2.2 Topes de las Formaciones y Presión de Yacimiento del
pozo B
Tabla 3. Topes de las Formaciones y Presión de Yacimiento del pozo B.
29
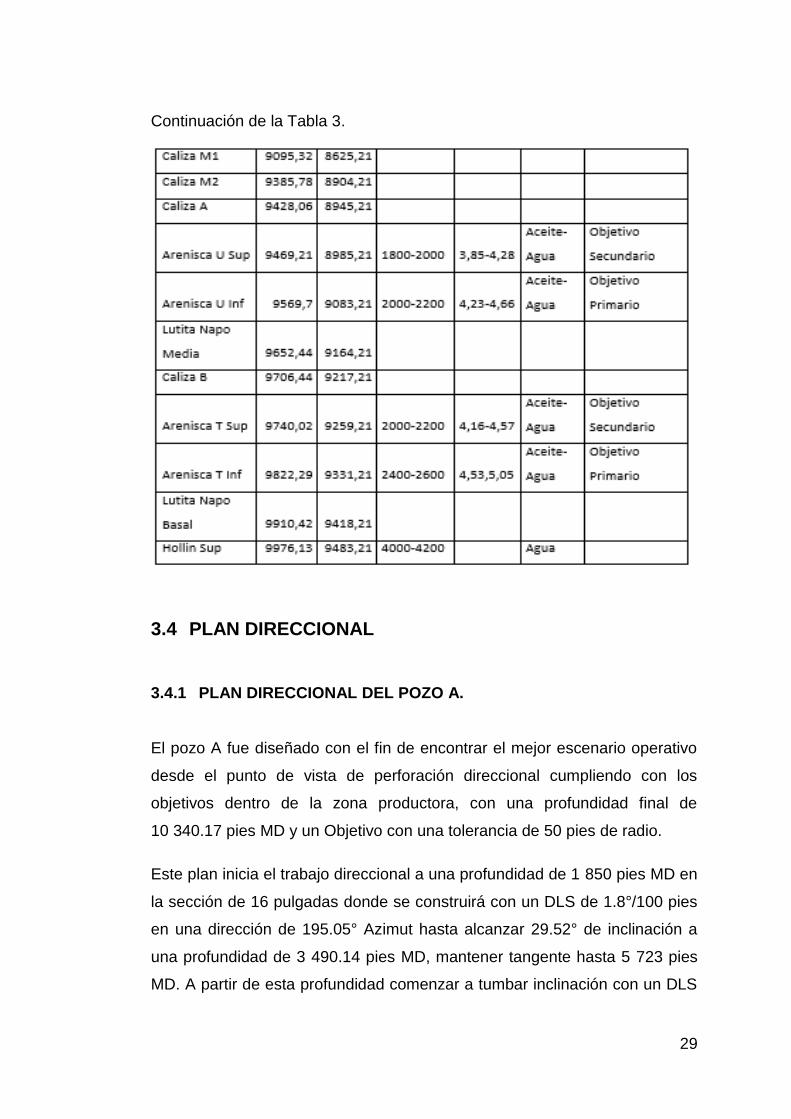
Continuación de la Tabla 3.
3.4 PLAN DIRECCIONAL
3.4.1 PLAN DIRECCIONAL DEL POZO A.
El pozo A fue diseñado con el fin de encontrar el mejor escenario operativo
desde el punto de vista de perforación direccional cumpliendo con los
objetivos dentro de la zona productora, con una profundidad final de
10 340.17 pies MD y un Objetivo con una tolerancia de 50 pies de radio.
Este plan inicia el trabajo direccional a una profundidad de 1 850 pies MD en
la sección de 16 pulgadas donde se construirá con un DLS de 1.8°/100 pies
en una dirección de 195.05° Azimut hasta alcanzar 29.52° de inclinación a
una profundidad de 3 490.14 pies MD, mantener tangente hasta 5 723 pies
MD. A partir de esta profundidad comenzar a tumbar inclinación con un DLS

30
de 1.5°/100 pies hasta verticalizar el pozo a 7 691.17 pies MD, a partir de allí
mantener vertical hasta la profundidad final a 10 340.17 pies MD.
3.4.2 PLAN DIRECCIONAL DEL POZO B.
El pozo B fue diseñado con el fin de encontrar el mejor escenario operativo
desde el punto de vista de perforación direccional cumpliendo con los
objetivos dentro de la zona productora, con una profundidad final de 10 118
pies MD y un Objetivo con una tolerancia de 50 pies de radio.
Este plan inicia el trabajo direccional a una profundidad de 3 000 pies MD en
la sección de 16 pulgadas donde se construirá con un DLS de 1.4°/100 pies
en una dirección de 300° Azimut hasta alcanzar 10° de inclinación a una
profundidad de 3 714 pies MD y luego girar con un DLS de 1.6°/100 pies en
una dirección de 266.41° Azimut hasta alcanzar 26° de inclinación a una
profundidad de 4 868 pies MD, de allí mantener tangente hasta 8 417 pies
MD.
A partir de esta profundidad comenzar a tumbar inclinación con un DLS de
1.2°/100 pies hasta la profundidad de 9 570 pies MD y luego seguir con la
caída de ángulo a razón de 1°/100 pies hasta la profundidad final a 10 118
pies MD.

31
3.5 VISTA VERTICAL
3.5.1 VISTA VERTICAL DEL POZO A.
Figura 12. Vista en Vertical del plan direccional del pozo A.
(PETROAMAZONAS, 2014)

32
3.5.2 VISTA VERTICAL DEL POZO B.
Figura 13. Vista en Vertical del plan direccional del pozo B.
(PETROAMAZONAS, 2015)

33
3.6 VISTA EN PLANTA
3.6.1 VISTA EN PLANTA DEL POZO A.
Figura 14. Vista en Planta del plan direccional del pozo A.
(PETROAMAZONAS, 2014)

34
3.6.2 VISTA EN PLANTA DEL POZO B.
Figura 15. Vista en Planta del plan direccional del pozo B.
(PETROAMAZONAS, 2015)

35
3.7 POZOS VECINOS Y ANTICOLISIÓN
3.7.1 PARA EL POZO A.
Se realizó un Escaneo global con los pozos existentes en el campo
Shushufindi mostrando que existen 6 pozos que arrojan falla en el análisis
de Anticolisión. Siendo el pozo Shushufindi 170D el más cercano y se
encuentra a 26.26 pies de distancia en superficie y a una distancia centro a
centro de 19.61 pies en el punto más cercano a la profundidad de 980 pies.
Los otros pozos que son Shushufindi 41, Shushufindi 61, Shushufindi 25,
Shushufindi 85 y Shushufindi 47 se encuentran a más 8 000 pies de
distancia en superficie, sin embargo presentan falla ya que no poseen
registros de desviación confiable por lo que es necesario gestionar una
excepción de anticolisión.
3.7.2 PARA EL POZO B.
Se realizó un Escaneo global con los pozos existentes en el campo
Shushufindi mostrando que existe 1 pozo que arroja una falla mayor en el
análisis de Anticolisión. El Shushufindi 73V es un pozo que se encuentra a
una distancia de 77.71 pies centro a centro en su punto más cercano a una
profundidad de 3 950 pies MD por lo cual es necesario generar una exención
de anticolisión. Luego tenemos el Shushufindi 187D que se encuentra a una
distancia de 24.84 pies centro a centro a una profundidad de 2 400 pies MD
y el Shushufindi 295D que se encuentra a una distancia de 51.85 pies centro
a centro a una profundidad de 1 030 pies MD, que se deben tener en cuenta
durante el monitoreo de anticolisión.
3.8 ENSAMBLAJES DE FONDO
La descripción de los ensamblajes de fondo utilizados en la perforación de
los pozos A y B de detallan en los anexos.
36
CAPITULO IV
4 ANÁLISIS E INTERPRETACIÓN DE RESULTADOS
4.1 ANÁLISIS POR SECCIONES
4.1.1 SECCIONES DEL POZO A.
4.1.1.1 Sección conductora, 26 pulgadas.
Esta sección fue realizada en 1.85 días sin NPT reportado.
Armó total 100 paradas (300 juntas) de DP 5 pulgadas, más 10 paradas (30
juntas) de HWDP de 5 pulgadas, se midió y calibro en caballetes.
Armó BHA Nª 1 convencional con broca tricónica de 26 pulgadas, se perforo
agujero de 26 pulgadas hasta 116 pies. Circulo a través del sellar jet, los
últimos 4 pies por presencia de boulders. Reviso broca y continuo
perforando desde 116 pies. Bombeó, circuló para limpieza y saco hasta
superficie. Regreso a fondo, circuló y se agrega píldora viscosa. Saco sarta
de perforación hasta superficie y quebró broca.
La sección termino a 228 pies MD y 228 pies de TVD y 0,41º de inclinación.
Para la perforación se utilizó lodo nativo gelex con un peso de 8,5 LPG y
terminando con 9,1 LPG.
4.1.1.2 Sección superficial, 16 pulgadas.
Esta sección fue realizada en 6,21 días sin NPT reportado.
37
Armo BHA direccional con broca PDC de 16 pulgadas y power drive x5
1100. Probó y bajo herramienta direccional desde 80 pies hasta 225 pies
(tope de cemento). Desde 141 pies bajo lavando. Bombeo píldora
espaciadora y desplazo lodo contaminado por lodo nuevo. Perforo zapato
desde 225 pies hasta 228 pies. Perforo sección de 16 pulgadas
verticalmente desde 228 pies hasta 2 075 pies, se observó perdida de flujo,
caída de nivel de hasta 60 bbls de lodo en los tanques y retorno de
formación en forma de rocas de tamaño moderado. Circuló. La formación
devolvió casi todo el flujo perdido, se perdió 15 bbls. Se bombeo 100 bbls de
píldora de alta viscosidad y barrido, continúo perforando de 2 075 pies hasta
2 598 pies. Bombeo tren de píldoras. Continúo perforando desde 2 598 pies
hasta 4 565 pies. Bombeo y circulo. Continuo perforando desde 4565 pies
hasta 5 675 pies, bombeo y circulo. Saco sarta libre desde 5 675 pies hasta
4666 pies, con backreaming desde 4666 pies hasta 4030 pies, con bomba
desde 4 030 pies hasta 3 483 pies, a 3 483 pies se observó restricción de
movimiento con intento de pega. Se trabajó hacia abajo y arriba con bomba
hasta obtener full circulación y rotación. Bombeo y circulo para tratar de
desembolar BHA. Continuo sacando con backreaming desde 3483 pies
hasta 2 810 pies, con bomba desde 2 810 pies hasta 2 430 pies, libre desde
2 430 pies hasta 228 pies. Bombeo y circulo. Bajo BHA libre desde 228 pies
hasta 4 570 pies donde encontró restricción, conecto top drive y continuo
bajando desde 4 570 pies hasta 5 675 pies con reamming, bombeo y circulo,
saco libre desde 5675 hasta 5600 pies, con bomba desde 5 600 pies hasta
5 300 pies, libre de 5 300 pies hasta superficie. Quebró broca.
La sección termina a 5 675 pies MD y 5367,05 TVD con 28,10º de
inclinación y 193º de azimut.
4.1.1.3 Sección intermedia, 12 ¼ pulgadas.
Esta sección fue realizada en 7,98 días con 0,2 días de NPT reportado.
38
Armo BHA Nº 3 direccional con broca de 12 ¼ pulgadas de con PD 900 X6
con HWDP desde 97 pies hasta 738 pies. Continúo bajando hasta 1 050 pies
y probo herramientas direccionales. Continúo bajando desde 1 050 pies
hasta 5 400 pies. Conecto top drive, lleno tubería y bajo lavando con
precaución hasta tope de cemento hasta 5 607 pies. Perforo cemento más
tapones más collar flotador y cemento hasta 5 627 pies. Realizo prueba de
integridad del revestido de 13 3/8 de pulgada con 1000 psi durante 10
minutos.
Continúo moliendo cemento más zapata y 10 pies de nueva perforación
desde 5 675 pies hasta 5 685 pies. Cambio fluido nativo de 10,4 lpg por
fluido nuevo klashfiel de 9,5 lpg. Realizo prueba de integridad a la formación
con 530 psi con 12,5 lpg. Perforo agujero de 12 ¼ pulgadas desde 5 285
pies hasta 6 717 pies. Perforo con parámetros controlado desde 6 717 pies
hasta 6 885 pies con parámetros normales desde 6 885 pies hasta 7 677
pies con parámetros controlados desde 7 677 pies hasta 8 315 pies con
parámetros normales desde 8 315 pies hasta 8 692 pies. Saco sarta de la
siguiente manera: con elevadores desde el fondo hasta 8 692 pies, punto
apretado a 7 350 pies; con bomba desde 7 350 pies hasta 6 885 pies, con
backreaming desde 6 885 pies hasta 5 853 pies, libre desde 5 853 pies
hasta 101 pies con tubería seca. Quebró broca.
Armo BHA Nº 4 direccional con broca PDC de 12 ¼ pulgadas con motor
hasta 1485 pies, probo herramientas direccionales. Continuo bajando desde
1 435 pies hasta el fondo, a 8 250 pies encontró punto apretado. Perforo con
parámetros normales desde 8 692 pies hasta 8 845 pies, con parámetros
controlados desde 8 845 pies hasta 9 530 pies.
La sección termina a 9 530 pies MD y 9072,77 TVD con 0,9º de inclinación
y 102,78º de azimut. Para la perforación se utilizó fluido klashield, inicia la
perforación con uno peso de 9,5 lpg y terminando con 10,4 lpg.

39
4.1.1.4 Sección de producción 8 ½ pulgadas.
Esta sección fue realizada en 3,13 días, sin NPT reportado.
Armo BHA Nº 5 direccional con broca PDC de 8,5 pulgadas y motor XP,
probo herramientas direccionales y bajo BHA desde 1 137 pies hasta 9 434
pies. Perforo tapones (9 434) pies más collar flotador más cemento hasta
9 490 pies. Realizo prueba de integridad del revestido de 9 5/8 de pulgada
aplicando 1 850 psi durante 10 minutos, continuo moliendo cemento más
zapata más 10 pies de nueva formación hasta 9 540 pies mientras desplazo
fluido kla stop NT de 10,4 lpg por lodo kla stop NT de 8,9 lpg. Realizo prueba
de integridad a la formación con 1 700 psi durante 10 minutos y una
densidad equivalente de 12,5 lpg. Perforo agujero de 8,5 pulgadas desde
9 540 pies hasta 10 272 pies. Bombeo tren de píldoras y circulo hasta
retorno limpio. Saco BHA desde el fondo hasta 9 522 pies libre. Regreso a
fondo y espoteó píldora viscosa sellante. Saco desde el fondo 10 272 pies
hasta 9 522 pies, circulo y bombeo píldora. Continúo sacando sarta hasta
superficie. Quebró BHA y broca.
La sección termina a 10 272 pies MD y 9812,65 pies TVD con 1,27º de
inclinación y 55,46º de azimut. Para la perforación se utilizó fluido kla stop
NT, se inicia con un peso de 8,9 lpg y se termina con un peso de 9,2 lpg.
Concluye operaciones de perforación con un total de 19,37 días de
operaciones con un tiempo productivo de 19,17 días y NPT de 0,2 días.
40
4.1.2 SECCIONES DEL PÒZO B
4.1.2.1 Sección conductora, 26 pulgadas.
Esta sección fue realizada en un día sin NPT reportado.
Armo BHA Nº1 convencional con broca bicónica de 26 pulgadas y perforó
hasta 280 pies, se determinó presencia de boulders desde 90 hasta 180
pies. Bombeo 50 bbls de píldora viscosa y circulo. Bombeo 50 bbls de
píldora dispersa y circulo. Esporteó 140 bbls de píldora viscos estabilizadora.
Verifico pozo estático y realizo viaje desde 280 pies hasta superficie, quebró
broca.
La sección termino a 280 pies MD y 279,9 pies TVD con 0,85º de inclinación
y 231,17º de azimut. Para la perforación se utilizó fluido lodo nativo gelex
con un peso inicial de 8,5 lpg y final de 9,0 lpg
4.1.2.2 Sección superficial, 16 pulgadas.
Esta sección fue realizada en 5,65 días sin NPT reportado.
Armo BHA Nº 2 direccional con broca PDC de 16 pulgadas y motor de fondo
GT. Probo y bajo herramienta direccional hasta 275 pies, perforo cemento y
zapato hasta 280 pies.
Bombeó 40 bbls de píldora espaciadora y se cambió fluido nativo gelex por
nativo disperso de 9 lpg, confirmo perforando desde 280 pies hasta 544 pies.
Realizo corrida de giro de 544 pies
Perforó sección de 16 pulgadas verticalmente desde 544 pies hasta 3 000
pies y direccionalmente a razón de 1,4º/100 pies, desde 3 000 pies hasta
5 200 pies, desde donde mantiene la tangente hasta la TD de la sección a
41
5 700 pies repasando dos veces cada parada perforada y bombeando
píldora viscosa cada dos paradas. Bombeo 60 bbls de píldora viscosa
pesada, verifico pozo estático.
Realizo viaje corto desde 5 700 pies hasta 5 167 pies libre y circulo. Regreso
libre desde 5 171 pies a fondo hasta 5 700 pies. Espoteó 140 bbls de píldora
estabilizadora sellante con lubricante, verifico pozo estático.
Saco BHA Nº2 de la siguiente manera: desde 5 700 pies hasta 4 310 pies
con backreaming desde 4 310 pies hasta 3 850 pies bombeo 40 bbls de
píldora dispersa seguido de 50 bbls de píldora viscosa y circulo.
Continúo sacando sarta con bomba desde 3 850 pies hasta 3 390 pies,
backreaming desde 3 390 pies hasta 3 200 pies. Se decidió bajar BHA Nº2
para limpiar la sarta.
Bajo BHA Nº 2 libre desde 3 200 pies hasta 3 565 pies y circuló 60 bbls de
píldora suficiente hasta retornos limpios.
Saco BHA Nº2 de la siguiente manera libre desde 3 565 pies hasta 3 200
pies, Backreaming desde 3 200 pies hasta 2 715 pies donde se observó
conato de empaquetamiento por lo que se trabajó la sarta mecánicamente
con 550 gpm y 70 rpm hasta recuperar retornos en superficie.
Continúo sacando sarta de la siguiente manera: backreaming desde 2 715
pies hasta 1 420 pies, bomba desde 1 420 pies hasta 944 pies, circulo un
fondo arriba y saco sarta libre desde 944 pies hasta superficie. Quebró BHA
Nº2.
La sección termina a 5 700 pies MD y 5 566,34 pies TVD con una inclinación
de 25,09º y un azimut de 267,96º. Para la perforación se utilizó fluido lodo
nativo disperso con un peso inicial de 9,0 lpg y un peso final de 10,6 lpg.

42
4.1.2.3 Sección intermedia, 12 ¼ pulgadas.
Esta sección fue realizada en 6,14 días sin NPT reportado.
Armo BHA Nº3 direccional con broca PDC de 12 ¼ pulgadas y power drive
900X6. Probo herramientas direccionales a 1 035 pies, continuo bajando
hasta 5 630 pies, tope de cemento, perforo tapones, collar flotador y
cemento hasta 5 685 pies, bombeo 40 bbls de píldora viscosa y circulo para
sacar del pozo residuos de tapón, cemento y collar flotador, realizo prueba
de integridad del revestidor de 13 3/8 pulgadas aplicando 1 500 psi por 10
minutos, continuo moliendo cemento y zapata desde 5 685 pies hasta 5 700
pies. Cambio sistema de lodo nativo disperso de 10,6 lpg por lodo ultra drill
de 10 lpg, continuo perforando 15 pies dentro de la formación desde 5 700
pies hasta 5 715 pies, levanto sarta hasta 5 700 pies y realizo prueba de
integridad a la formación con 724 psi durante 10 minutos para una densidad
equivalente de 12,5 lpg.
Perforó sección de 12 ¼ pulgadas de la siguiente manera: con parámetros
normales desde 5 715 pies hasta 5 920 pies, parámetros controlados al
detectar entrada al conglomerado superior desde 5 920 hasta 6 484 pies (se
determinó el tope del conglomerado superior a 6 396 pies ), parámetros
normales desde 6 488 pies hasta 7 390 pies, parámetros controlados al
detectar entrada al conglomerado inferior desde 7 390 pies hasta 7 490 pies,
(se determinó el tope del conglomerado inferior a 7 440 pies), parámetros
controlados desde 7 440 pies hasta 7 780 pies, parámetros normales desde
7 708 pies hasta 8 743 pies, parámetros controlados para determinar
entrada a Basal Tena desde 8 743 pies hasta 8 796 pies. (Se determinó el
tope de Basal Tena a 8 764 pies), parámetros normales desde 8 796 pies
hasta 9 401 pies. Repaso dos veces cada parada perforada y bombeo
píldora de limpieza cada tres paradas. Bombeo 80 bbls de píldora viscosa
pesada y circulo, verifico pozo estático.
Saco BHA Nº3 desde 9 401 pies hasta 8 648 pies y circulo hasta tener
retorno de píldoras de limpieza en superficie

43
Regreso a fondo desde 1 648 pies hasta 9 401 pies, bombeo 80 bbls de
píldora viscosa pesada y circulo fondo arriba. Espoteó 100 bbls de píldora
viscosa lubricante estabilizadora en fondo y verifico pozo estático.
Saco BHA Nº 3 del siguiente modo: libre desde 9 401 pies hasta 7 916 pies,
con backreaming desde 7 916 pies hasta 5 635 pies donde se observó
overpool de hasta 90 klbs: por lo que se bombeo 60 bbls de píldora dispersa
con material desembolante. Se levantó la sarta desde 5 635 pies hasta 5 448
pies para confirmar sarta libre de restricciones.
Esporteó 50 bbls de píldora pesada.
Continuo sacando BHA Nº3 libre desde 5 448 pies hasta superficie. Quebró
BHA Nº3.
La sección termina a 9 401 pies MD y 9 923,11 pies TVD, con 14,59º de
inclinación y 262,12º de azimut. Para la perforación se utilizó fluido ultra drill
con un peso inicial de 10 lpg y un peso final de 10,6 lpg.
4.1.2.4 Sección de producción 8 ½ pulgadas.
Esta sección fue realizada en 4,65 días, sin NPT reportado.
Armo BHA Nº4 direccional con broca PDC de 8,5 pulgadas y motor de fondo
A675M, bajo herramienta direccionales hasta encontrar tope de cemento a
9 288 pies, perforo cemento, tapo, collar flotador y cemento hasta 9 368
pies, circulo para limpiar el pozo y realizar prueba de integridad del
revestidor de 9 5/8 aplicando 2000 psi durante 10 minutos, continuo
moliendo cemento, zapato flotador y perforó nueva formación hasta 9 419
pies, desplazo fluido de perforación ultra drill de 10,6 lpg por nuevo fluido Kla
stop NT de 9 lpg, circulo para homogeneizar fluido, realizo prueba de
integridad a la formación con 1 624 psi durante 10 minutos para una
densidad equivalente de 12,5 lpg.
44
Perforo agujero de 8,5 pulgadas desde 9 419 pies hasta 9 960 pies, se
modificó el programa de perforación en cuanto a la profundidad del pozo, es
decir no se perforó hasta la formación Hollín. Repaso dos veces cada parada
perforada y bombeo píldora viscosa con material puenteante y sellante cada
parad, verifico pozo estático y registro pesos de la sarta, levanto broca
desde 9 960 pies hasta 9 320 pies, circulo y regreso a fondo a 9 960 pies,
espoteó 50 bbls de píldora puenteante, sellante y estabilizadora con
lubricidad, se verifico pozo estático.
Saco desde saco desde 9 960 pies hasta 9 320 pies y espoteó 50 bbls de
píldora pesada para sacar tubería seca. Continuo sacando desde 9 320 pies
hasta superficie, quebró BHA y broca.
La sección termina a 9960 pies MD/ 9467,18 pies TVD con una inclinación
de 12º y un azimut de 262,50º.
Concluye operaciones de perforación con un total de 17,44 días de
operación sin NPT.
4.2 ANÁLISIS DE PROBLEMAS DURANTE LA
PERFORACIÓN
4.2.1 PROBLEMAS DURANTE LA PERFORACIÓN DEL POZO A
Problemas para tomar surveys debido a la presencia de mucha
espuma en el lodo. Se trató el fluido añadiendo antiespumantes.
Después de varios intentos se logró tomar survey.
Desde 3 200 pies hasta 2 715 pies donde se observó conato de
empaquetamiento por lo que se trabajó la sarta mecánicamente con
backreaming a 550 gpm y 70 rpm hasta recuperar retornos en
superficie.
45
A 3 483' se observó restricción de movimiento con intento de pega.
Se trabajó cañería hacia abajo, hacia arriba, con rpm, con bomba
hasta conseguir full circulación y rotación.
Se apagan los generadores por falta de diésel a los 9 724 pies. Este
problema pone en riesgo a los componentes del BHA a más de dejar
el pozo sin actividad con todos los riesgos que implica. La falta de
diésel produjo un NPT de 3 horas.
A los 9 542 pies fallan las bombas lo que produjo un NPT de una
hora, al fallar las bombas perdemos circulación en el pozo lo que
podría ocasionar empaquetamientos.
4.2.2 PROBLEMAS DURANTE LA PERFORACIÓN DEL POZO B
A profundidad de 4 041pies, 4 033 pies, 4 011 pies y 4 310 pies se
observó puntos apretados realizando un máximo de overpull 60 klbs.
Sacando BHA # 2 en modo backreaming desde 4 310 pies hasta
3 850 pies. Parámetros: caudal 1 000 gpm, presión: 2 600-2 900 psi,
rotación: 70 rpm, torque: 7 - 14 klbs-pie. Durante la sacada en modo
backreaming se observaron incrementos puntuales de presión y
torque.
En la sección de 8 ½ pulgadas en el viaje a fondo con la sarta de
registros eléctricos se observaron sobretensiones por lo que se
canceló la corrida de registros especiales adicionales CMR
46
4.3 ESQUEMA MECÁNICO DEL POZO
4.3.1 ESQUEMA MECÁNICO DELPOZO A
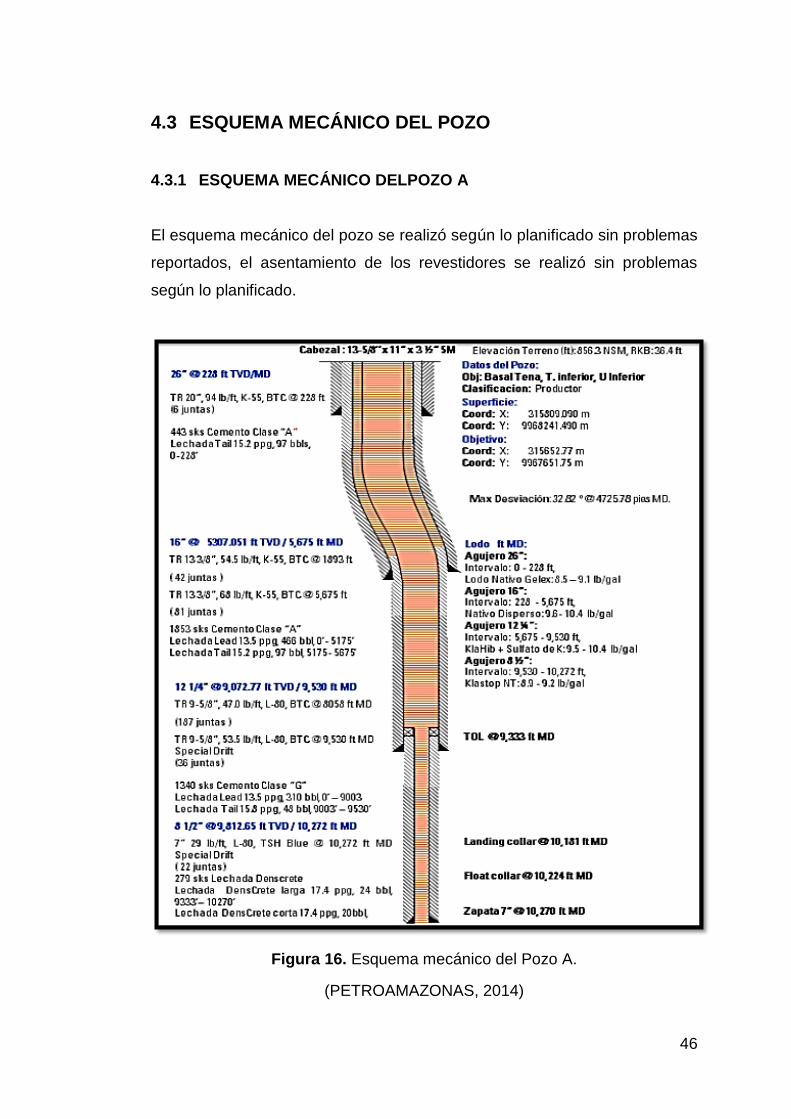
El esquema mecánico del pozo se realizó según lo planificado sin problemas
reportados, el asentamiento de los revestidores se realizó sin problemas
según lo planificado.
Figura 16. Esquema mecánico del Pozo A.
(PETROAMAZONAS, 2014)

47
4.3.2 ESQUEMA MECÁNICO DEL POZO B
El esquema mecánico del pozo se realizó sin problemas reportados. Aunque
los puntos de asentamiento de los revestidores debieron ser modificados
debido a la tortuosidad y espesor de los estratos. La bajada de los
revestidores se realizó sin problemas de puntos apretados.
Figura 17. Esquema Mecánico del Pozo B
(PETROAMAZONAS, 2015)

48
4.4 CURVA DE TIEMPO VS PROFUNDIDAD
4.4.1 CURVA DE TIEMPO VS PROFUNDIDAD DEL POZO A.
Figura 18. Tiempo VS Profundidad de la perforación del pozo A
Con los NPT ocurridos como: la falta de diésel y falla en las bombas, se
pudo terminar el pozo antes de lo planificado. Se concluyeron operaciones
de perforación con un ahorro de 0,83 días según la planificación.

49
4.4.2 CURVA DE TIEMPO VS PROFUNDIDAD DEL POZO B
Figura 19. Tiempo VS Profundidad de la perforación del pozo B
El pozo B se realizó sin NPT reportado produciendo una ganancia de 5,81
días, tiempo que refleja un ahorro en operaciones de perforación. A pesar de
que se realizaron operaciones backreaming se logró terminar la perforación
antes de lo planificado.

50
4.5 ANÁLISIS DE TIEMPOS POR ETAPAS
4.5.1 ANÁLISIS DE TIEMPOS DEL POZO A
Tabla 4. Análisis de tiempos por etapas del pozo A.
SECCIÓN TIEMPO
PRODUCTIVO (días)
TIEMPO NO PRODUCTIVO
(días)
TOTAL (días)
26" 1,85 0 1,85
16" 6,21 0 6,21
12 1/4" 7,98 0,2 8,18
8 1/2" 3,13 0 3,13
Total 19,17 0,2 19,37
Se observa una alta ROP en las zonas de desviación con el uso de las RSS
y en la zona de mantenimiento de tangente observamos valores dentro de lo
planificados con el uso me motores orientables.
Figura 20. ROP por formación en la última sección del pozo A.

51
Se presentan valores muy similares de ROP a lo largo de la trayectoria del
pozo, en las lutitas de la formación Napo hay una reducción de las ROP
debido a intentos de pega y atascamientos por lo que se debió realizar
trabajos de backreaming. En la caliza A también se redujo la ROP debido a
que en múltiples tramos se debió perforar con parámetros controlados por la
estratigrafía de la zona, también se realizaron ajustes del lodo de perforación
debido a la presencia de glauconita.
4.5.2 ANÁLISIS DE TIEMPOS DEL POZO B
Tabla 5. Análisis de tiempos por etapas del pozo B.
SECCIÓN TIEMPO
PRODUCTIVO (días)
TIEMPO NO PRODUCTIVO
(días)
TOTAL (días)
26" 1 0 1
16" 5,65 0 5,65
12 1/4" 6,14 0 6,14
8 1/2" 4,65 0 4,65
Total 17,44 0 17,44
Los tiempos de perforación en todas las secciones fueron inferiores a lo
planificado, dando cumplimiento a la trayectoria sin NPT reportado.
Reflejando una alta ROP en zonas de construcción así como en zonas de
mantenimiento de tangencia con el uso del sistema RSS.

52
Figura 21. ROP por formación en la última sección del pozo B.
Con el uso del sistema RSS al atravesar las lutitas del Napo no se afectó las
ROP como en el caso del pozo A, en donde se utilizaron motores PDM
para la sección de mantenimiento de tangencia. Observamos una velocidad
de perforación reducida al atravesar la caliza A.
4.6 TIEMPOS NO PRODUCTIVOS
4.6.1 ANÁLISIS DE TIEMPOS NO PRODUCTIVOS DEL POZO A.
Figura 22. Tiempos no Productivos del Pozo A

53
4.6.2 ANÁLISIS DE TIEMPOS NO PRODUCTIVOS DEL POZO B
Figura 23. Tiempos no Productivos del Pozo B
En el pozo A se evidencia tiempos no productivos ya que se produjeron NPT
debido a factores externos como una falla en las bombas y falta de diésel.
En cuanto al pozo B se obtuvo un 100% de tiempo productivo sin NPT
reportado.
4.7 DISTRIBUCIÓN DE TIEMPOS
4.7.1 DISTRIBUCIÓN DE TIEMPOS DEL POZO A
Figura 24. Distribución del tiempo de operación en la perforación del pozo A.

54
Las operaciones complementarias a la perforación del pozo se realizaron
dentro del tiempo planificado. En la distribución del tiempo total se refleja el
tiempo destinado a realizar reparaciones y el NPT reportado.
4.7.2 DISTRIBUCIÓN DE TIEMPOS DEL POZO B.
Figura 25. Distribución del tiempo de operación en la perforación del pozo B.
La distribución de tiempos refleja el cumplimiento de las operaciones
complementarias a la perforación del pozo dentro del tiempo planificado sin
NPT reportado.

55
4.8 PLAN DIRECCIONAL VS PLAN REAL
4.8.1 TOPES FORMACIONALES DEL POZO A
Tabla 6. Análisis de los topes de formacionales del pozo A.
FORMACION
TOPES FORMACIONALES
PROGNOSIS CORTES
DIFERENCIA MD (ft) TVD (ft)
TVDSS (ft)
MD (ft)
TVD (ft)
TVDSS (ft)
ORTEGUAZA 5563 5252 -4359 5611 5251 -4358 1 ARRIBA
TIYUYACU 6224 5868 -4975 6302 5873 -4980 5 ABAJO
CGL SUPERIOR 6691 6320 -5427 6773 6323 -5430 3 ABAJO
BASE CGL SUPERIOR
6752 6380 -5487 6835 6384 -5491 4 ABAJO
CGL INFERIOR 7649 7272 -6379 7733 7276 -6383 4 ABAJO
TENA 8183 7806 -6913 8251 7794 -6901 12 ARRIBA
BASAL TENA 8815 8438 -7545 8882 8424 -7531 14 ARRIBA
LUTITA NAPO SUPERIOR
8856 8479 -7586 8926 8469 -7576 10 ARRIBA
CALIZA "M-1" 9134 8756 -7863 9217 8760 -7867 4 ABAJO
CALIZA "M-2" 9425 9048 -8155 9511 9054 -8161 6 ABAJO
CALIZA "A" 9484 9107 -8214 9564 9107 -8214
ARENISCA "U" SUPERIOR
9531 9154 -8261 9617 9160 -8267 6 ABAJO
ARENISCA "U" INFERIOR
9624 9247 -8354 9711 9254 -8361 7 ABAJO
LUTITA MEDIA NAPO
9714 9337 -8444 9787 9330 -8437 7 ABAJO
CALIZA "B" 9784 9407 -8514 8767 9410 -8517 7 ABAJO
ARENISCA "T" SUPERIOR
9803 9426 -8533 9887 9430 -8537 4 ABAJO
ARENISCA "T" INFERIOR
9893 9516 -8623 9980 9523 -8630 7 ABAJO
LUTITA NAPO INFERIOR
9986 9609 -8716 10068 9611 -8718 2 ABAJO
ARENISCA HOLLIN SUP
10069 9692 -8799 10137 9680 -8787 12 ARRIBA
ARENISCA HOLLIN INF
10134 9756 -8863 10208 9751 -8858 5 ARRIBA
Los topes de las formaciones se encontraron en el rango de lo esperado en
base al estudio de geología. Las variaciones encontradas debido a la
tortuosidad y variaciones de espesor de los estratos hicieron que el alcance

56
del pozo sea ampliado a pesar de que la TVD resulto muy similar a la
planificada.
4.8.2 TOPES FORMACIONALES DEL POZO B
Tabla 7. Análisis de los topes formacionales del pozo B.
FORMACION
TOPES FORMACIONALES
PROGNOSIS CORTES
DIFERENCIA MD (ft)
TVD (ft)
TVDSS (ft)
MD (ft)
TVD (ft)
TVDSS (ft)
ORTEGUAZA 5.257 5.157 -4.283 5.242 5.153 -4.279 4 ARRIBA
TIYUYACU 5.910 5.743 -4.869 5.893 5.741 -4.867 2 ARRIBA
CGL SUPERIOR
6.407 6.190 -5.316 6.396 6.192 -5.318 2 ABAJO
BASE CGL. SUPERIOR
6.470 6.246 -5.372 6.457 6.246 -5.372 0
CGL INFERIOR 7.428 7.107 -6.233 7.440 7.121 -6.247 14 ABAJO
TENA 7.994 7.616 -6.742 7.985 7.602 -6.728 14 ARRIBA
BASAL TENA 8.794 8.341 -7.467 8.764 8.314 -7.440 27 ARRIBA
LUTITA NAPO SUPERIOR
8.807 8.353 -7.479 8.778 8.327 -7.453 26 ARRIBA
CALIZA "M-1" 9.095 8.625 -7.751 9.079 8.612 -7.738 13 ARRIBA
CALIZA "M-2" 9.386 8.904 -8.030 9.360 8.883 -8.009 14 ARRIBA
CALIZA "A" 9.428 8.945 -8.071 9.400 8.922 -8.048 23 ARRIBA
ARENISCA "U" SUPERIOR
9.469 8.985 -8.111 9.439 8.960 -8.086 25 ARRIBA
ARENISCA "U" INFERIOR
9.570 9.083 -8.209 9.520 9.038 -8.164 43 ARRIBA
BASE "U" INFERIOR
9.652 9.164 -8.290 9.635 9.150 -8.276 12 ARRIBA
CALIZA "B" 9.706 9.217 -8.343 9.693 9.207 -8.333 10 ARRIBA
ARENISCA "T" SUPERIOR
9.740 9.250 -8.376 9.711 9.224 -8.350 26 ARRIBA
ARENISCA "T" INFERIOR
9.822 9.331 -8.457 9.813 9.324 -8.450 7 ARRIBA
BASE "T" INFERIOR
9.910 9.418 -8.544 9.885 9.394 -8.520 24 ARRIBA
ARENISCA HOLLIN SUP
9.976 9.483 -8.609
ARENISCA HOLLIN INF
10.01 9.523 -8.649
TD 10118 9624 -8.750 9960 9467 -8.593 156 ARRIBA
Debido a la tortuosidad y variación de espesor de los estratos, el pozo B
resulto 156 pies arriba de lo planificado.
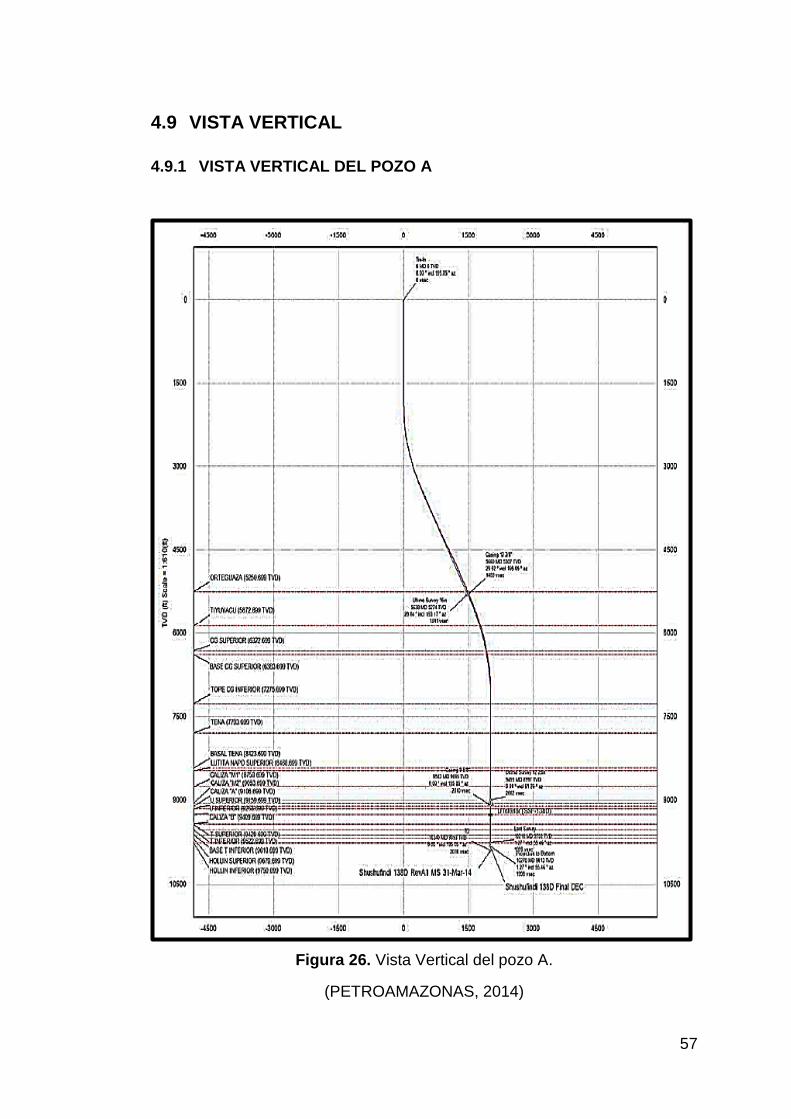
57
4.9 VISTA VERTICAL
4.9.1 VISTA VERTICAL DEL POZO A
Figura 26. Vista Vertical del pozo A.
(PETROAMAZONAS, 2014)
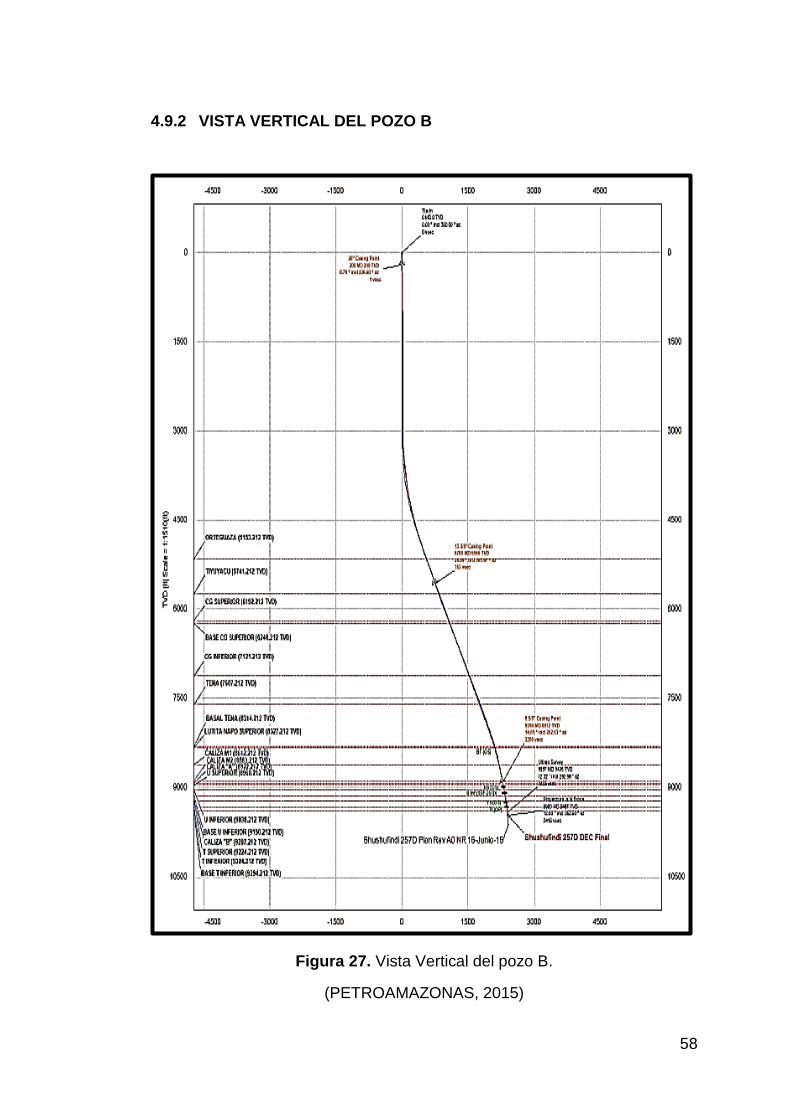
58
4.9.2 VISTA VERTICAL DEL POZO B
Figura 27. Vista Vertical del pozo B.
(PETROAMAZONAS, 2015)
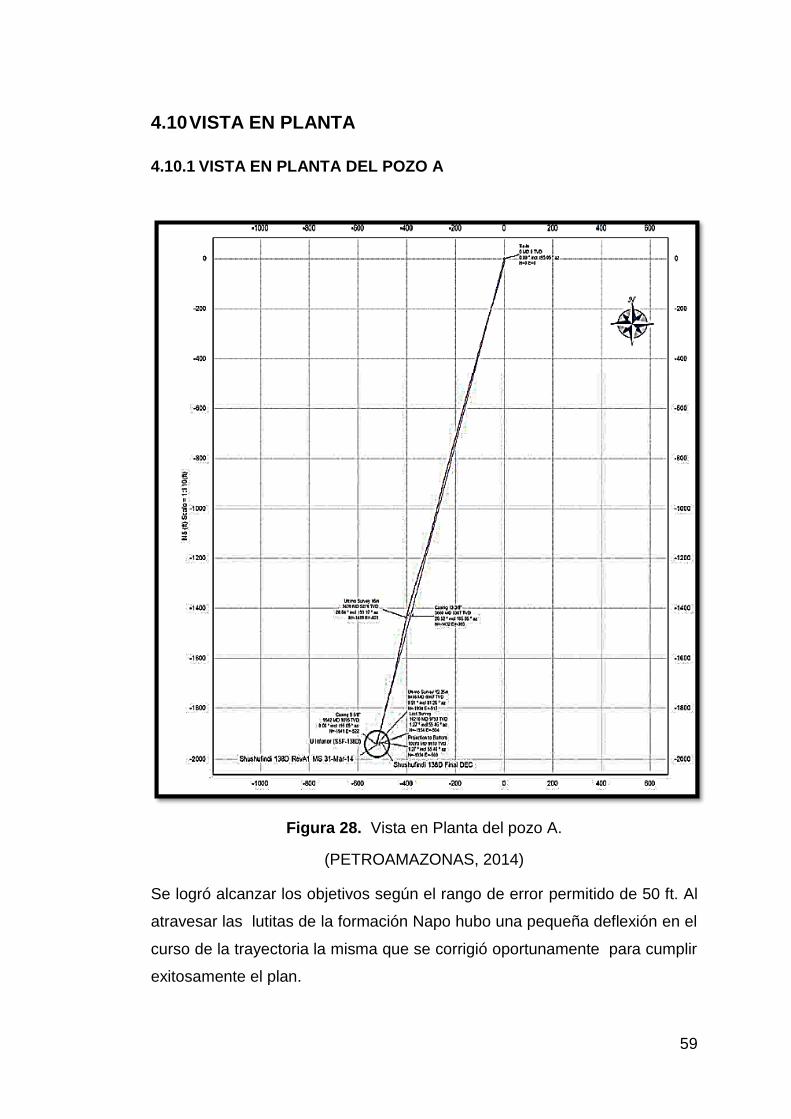
59
4.10 VISTA EN PLANTA
4.10.1 VISTA EN PLANTA DEL POZO A
Figura 28. Vista en Planta del pozo A.
(PETROAMAZONAS, 2014)
Se logró alcanzar los objetivos según el rango de error permitido de 50 ft. Al
atravesar las lutitas de la formación Napo hubo una pequeña deflexión en el
curso de la trayectoria la misma que se corrigió oportunamente para cumplir
exitosamente el plan.

60
4.10.2 VISTA PLANTA DEL POZO B
Figura 29. Vista en Planta del pozo B.
(PETROAMAZONAS, 2015)
Los objetivos del pozo se alcanzaron según el rango de error permitido. La
trayectoria resulto modificada de acuerdo a la ubicación de los estratos,
motivo por el cual se debió realizar un aumento en el ángulo de caída en la
última sección.
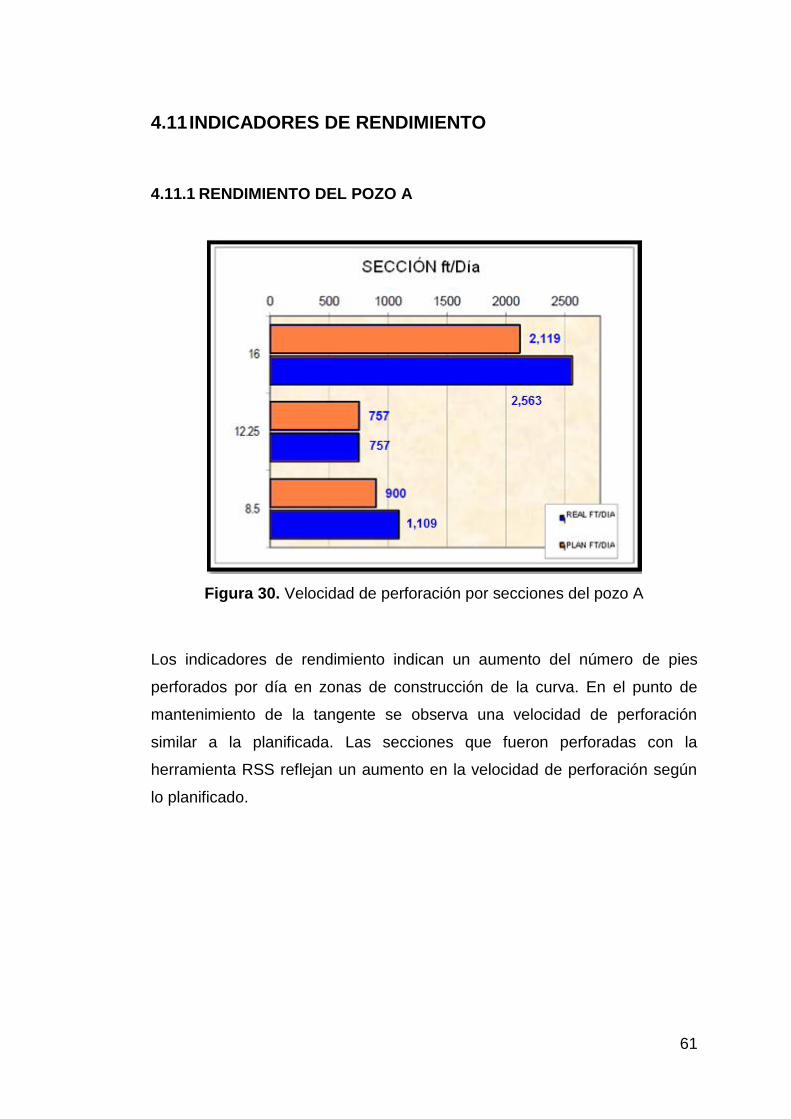
61
4.11 INDICADORES DE RENDIMIENTO
4.11.1 RENDIMIENTO DEL POZO A
Figura 30. Velocidad de perforación por secciones del pozo A
Los indicadores de rendimiento indican un aumento del número de pies
perforados por día en zonas de construcción de la curva. En el punto de
mantenimiento de la tangente se observa una velocidad de perforación
similar a la planificada. Las secciones que fueron perforadas con la
herramienta RSS reflejan un aumento en la velocidad de perforación según
lo planificado.
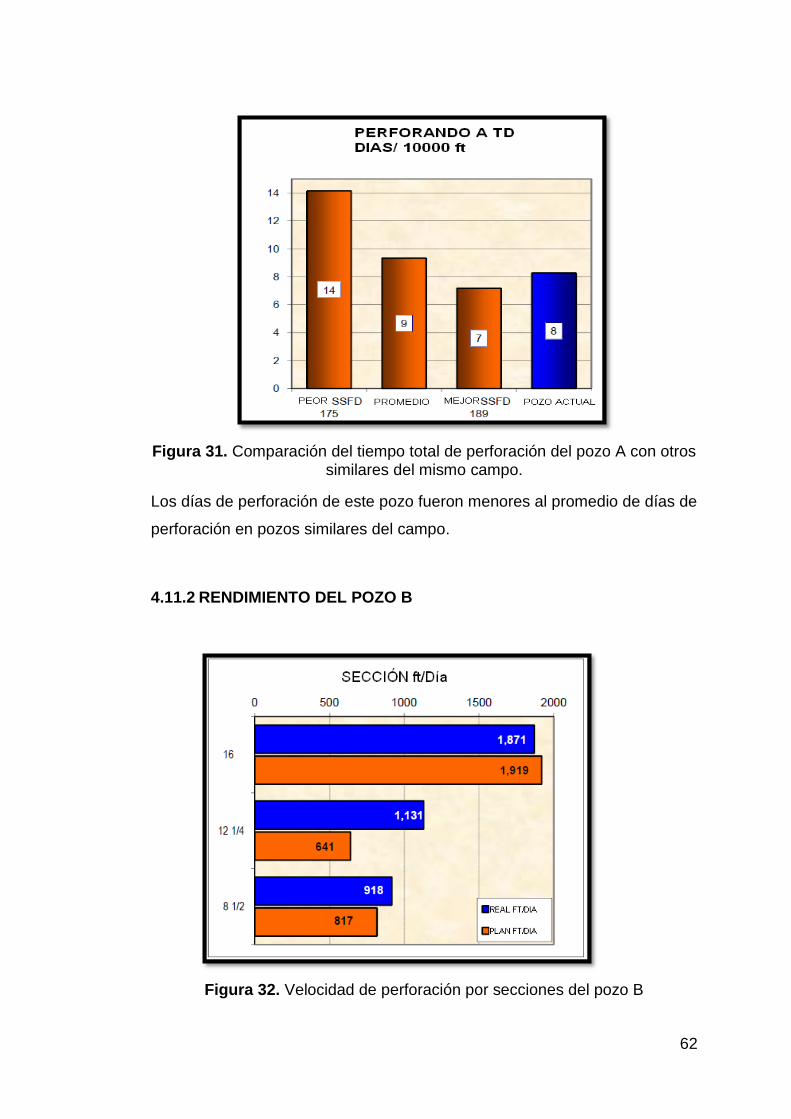
62
Figura 31. Comparación del tiempo total de perforación del pozo A con otros similares del mismo campo.
Los días de perforación de este pozo fueron menores al promedio de días de
perforación en pozos similares del campo.
4.11.2 RENDIMIENTO DEL POZO B
Figura 32. Velocidad de perforación por secciones del pozo B

63
En la sección superficial al atravesar los conglomerados se ve reducida la
velocidad de perforación debido a las operaciones de backreaming que se
tuvieron que realizar por intentos de empaquetamiento. Mientras que en las
dos secciones inferiores se observa un aumento significativo de la velocidad
de perforación con el uso del sistema RSS.
Figura 33. Comparación del tiempo total de perforación del pozo B con otros similares del mismo campo.
.
En el pozo B se estableció un nuevo record de perforación en pozos de
similares características del campo.

64
CAPITULO V
5 CONCLUSIONES Y RECOMENDACIONES
5.1 CONCLUSIONES
Con el uso de sistemas rotativos orientable es posible maximizar las
ROP y construir trayectorias en tiempos menores al planificado, la
herramienta de posicionamiento MWD resultó eficiente al determinar
las coordenadas de la trayectoria haciendo posible realizar
correcciones a los desvíos generados durante la perforación y de esta
manera cumplir con el programa de acuerdo al rango de error
permitido.
El uso del sistema RSS representa una mayor inversión para la
perforación de una trayectoria pero reduce significativamente los
riesgos operativos así como el tiempo de operación.
Con el sistema de rotación se realizaron operaciones para evitar
problemas de pega y empaquetamiento dando resultados muy
positivos evitando posibles NPT’s durante la perforación.
Con el sistema de rotación en las secciones de construcción de la
curva y de mantenimiento de la tangente se reduce el contacto del
BHA con las paredes del pozo y se facilita la limpieza de recortes.
Con el uso del sistema RSS de realizo la trayectoria del pozo de
forma limpia evitando la formación de llavederos y acercamientos
peligroso hacia pozos vecinos.
Con el uso del sistema LWD y los análisis de laboratorio se pudo
determinar de manera efectiva las variaciones de tortuosidad y
espesos de los estratos para ubicar de manera acertada los objetivos
primarios y secundarios del pozo así como los puntos de
asentamiento de los revestidores.

65
Con el uso del sistema RSS se logró disminuir los tiempos de
perforación en 0,83 días para el pozo A y en 5,81 días para el pozo B
5.2 RECOMENDACIONES
Se recomienda planificar de manera óptima el abastecimiento de
diésel para las operaciones de perforación y evitar los NPT’s
Se debe monitorear constantemente la presión y mantener el galonaje
óptimo a 1 100 gpm para garantizar la limpieza del hoyo.
Para la perforación de estratos inferiores a la Formación Tiyuyacu se
recomienda realizar calibres para evitar extender el tiempo con
operaciones de backreaming.
Se recomienda elevar el peso del lodo entre los 4 000 y 4 500 pies al
atravesar los conglomerados para garantizar la limpieza del hueco.
Se recomienda mantener la sección de tangente con la ayuda del
sistema RSS ya que esta manera se logró culminar la sección
exitosamente con un solo BHA.
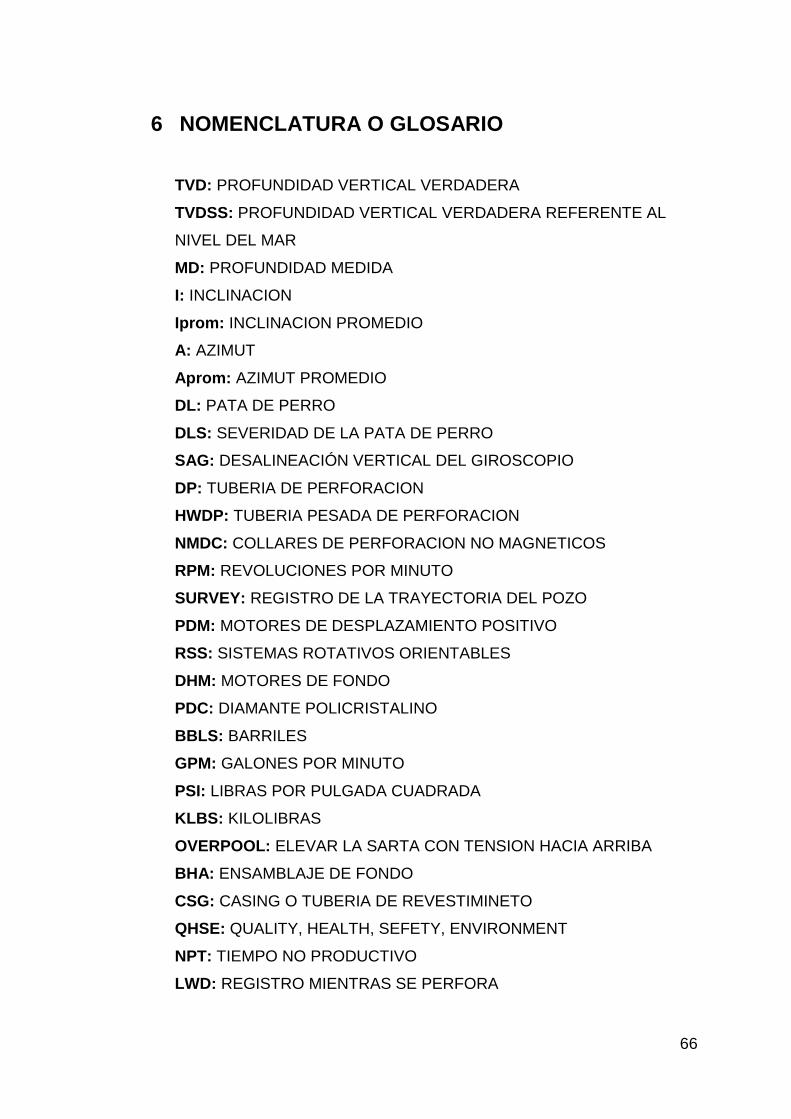
66
6 NOMENCLATURA O GLOSARIO
TVD: PROFUNDIDAD VERTICAL VERDADERA
TVDSS: PROFUNDIDAD VERTICAL VERDADERA REFERENTE AL
NIVEL DEL MAR
MD: PROFUNDIDAD MEDIDA
I: INCLINACION
Iprom: INCLINACION PROMEDIO
A: AZIMUT
Aprom: AZIMUT PROMEDIO
DL: PATA DE PERRO
DLS: SEVERIDAD DE LA PATA DE PERRO
SAG: DESALINEACIÓN VERTICAL DEL GIROSCOPIO
DP: TUBERIA DE PERFORACION
HWDP: TUBERIA PESADA DE PERFORACION
NMDC: COLLARES DE PERFORACION NO MAGNETICOS
RPM: REVOLUCIONES POR MINUTO
SURVEY: REGISTRO DE LA TRAYECTORIA DEL POZO
PDM: MOTORES DE DESPLAZAMIENTO POSITIVO
RSS: SISTEMAS ROTATIVOS ORIENTABLES
DHM: MOTORES DE FONDO
PDC: DIAMANTE POLICRISTALINO
BBLS: BARRILES
GPM: GALONES POR MINUTO
PSI: LIBRAS POR PULGADA CUADRADA
KLBS: KILOLIBRAS
OVERPOOL: ELEVAR LA SARTA CON TENSION HACIA ARRIBA
BHA: ENSAMBLAJE DE FONDO
CSG: CASING O TUBERIA DE REVESTIMINETO
QHSE: QUALITY, HEALTH, SEFETY, ENVIRONMENT
NPT: TIEMPO NO PRODUCTIVO
LWD: REGISTRO MIENTRAS SE PERFORA
67
MWD: MEDICIONES MIENTRAS SE PERFORA
PIE: UNIDAD DE MEDIDA REFERENTE A LA PROFUNDIDAD DEL
POZO
POOH: PULL OUT OF HOLE, referente a sacar un BHA fuera del pozo o
viaje intermedios de calibración de abajo hacia arriba.
PULGADA: UNIDAD DE MEDIDA USADA EN DIAMETROS DE LAS
SECCIONES Y HERRAMIENTAS
RIH: RUN IN HOLE, referente a introducir BHA dentro del pozo.
ROP: RATA DE PENETRACION
TD: TOTAL DEPTH (Profundidad total)
TDS: TOP DRIVE SISTEM
VS: DESPLAZAMIENTO HORIZONTAL
WOB: PESO SOBRE LA BROCA
TRICONICA: TIPO DE BROCA COMPUESTAS POR CONOS DE
RODILLOS
NPT: TIEMPO NO PRODUCTIVO

68
7 BIBLIOGRAFÍA
Anadril and GeoQuest. (s.f.). Torque y Arrastre.
Datalog. (2010). Manual para el Monitoreo de Vibración.
Escobar, F. H. (1994). Fundamentos de la Ingeniería del petroleo.
Flores, E. C. (2013). Repositorio Digital UCE. Obtenido de
file:///C:/Documents%20and%20Settings/SEBASTIAN/Mis%20docum
entos/Downloads/T-UCE-0012-250.pdf
Gorgone, I. (2013). Registros direccionales . Telemetria de MWD,
(pág. 42).
PETROAMAZONAS. (2014). Reporte Final de Perforación SHHF 138.
Quito.
PETROAMAZONAS. (2015). Reporte Final de Perforación SHHF 257.
Quito.
Petroproducion . (2004).
PETROWORKS. (2013). PROCEDIMIENTO PARA PEGAS DE
TUBERIA. Obtenido de
http://geologyanddrillingproblems.wikispaces.com/file/view/Procedimie
nto_para_Pegas_De_Tuberia_.pdf/345351864/Procedimiento_para_P
egas_De_Tuberia_.pdf
PROCTER, B. &. (1997). Risk Analysis for Prevention of Hazardous
Situations in Petroleum and Natural Gas Engineering.
Repsol, D. d. (2013). Columna Estratigrafica de la Cuenca Oriente.
SCHLUMBERGER . (2012). Oil Fiel Review. Obtenido de
https://www.slb.com/~/media/Files/resources/oilfield_review/spanish11
/win11/04_hybrid.pdf
SCHLUMBERGER. (14). Evolución de la Tecnología de perforacion
Direccional. Obtenido de
http://www.slb.com/~/media/Files/drilling/product_sheets/mwd/impulse
.pdf 33
Schlumberger. (2007). Interpretacion de Registros Electricos de Pozo.
69
Schlumberger. (2009). Direcctional Drilling Training Manual. Anadril.
SCHLUMBERGER. (2010). Fundamentos de Perforación Direccional.
Schlumberger. (2013). Mediciones MWD-LWD en la Industria
Petrolera. Obtenido de
http://www.slb.com/~/media/Files/resources/oilfield_review/spanish13/
aut13/3_geomagnetic.pdf
SCHLUMBERGER. (2013). Principios de Anticolisión de Pozos.
Programa de Entrenamiento para Supervisores, (pág. 12).
SCHLUMBERGER. (2014). SLB. Obtenido de
http://www.slb.com/~/media/Files/drilling/brochures/mwd.pdf
Schlumberger Direccional Drilling. (s.f.).
SCHLUMBERGER. (s.f.). Evolucion de la Tecnología de Perforacion
Direccional. Obtenido de
http://www.slb.com/media/services/resources/oilfieldreview/spanish00/
sum00/p20_31.pdf
slb. (2010). Nuevos rumbos en la perforacion rotativa direccional.
Tello, J. H. (2009). Fundamentos de Perforacion Direccional.
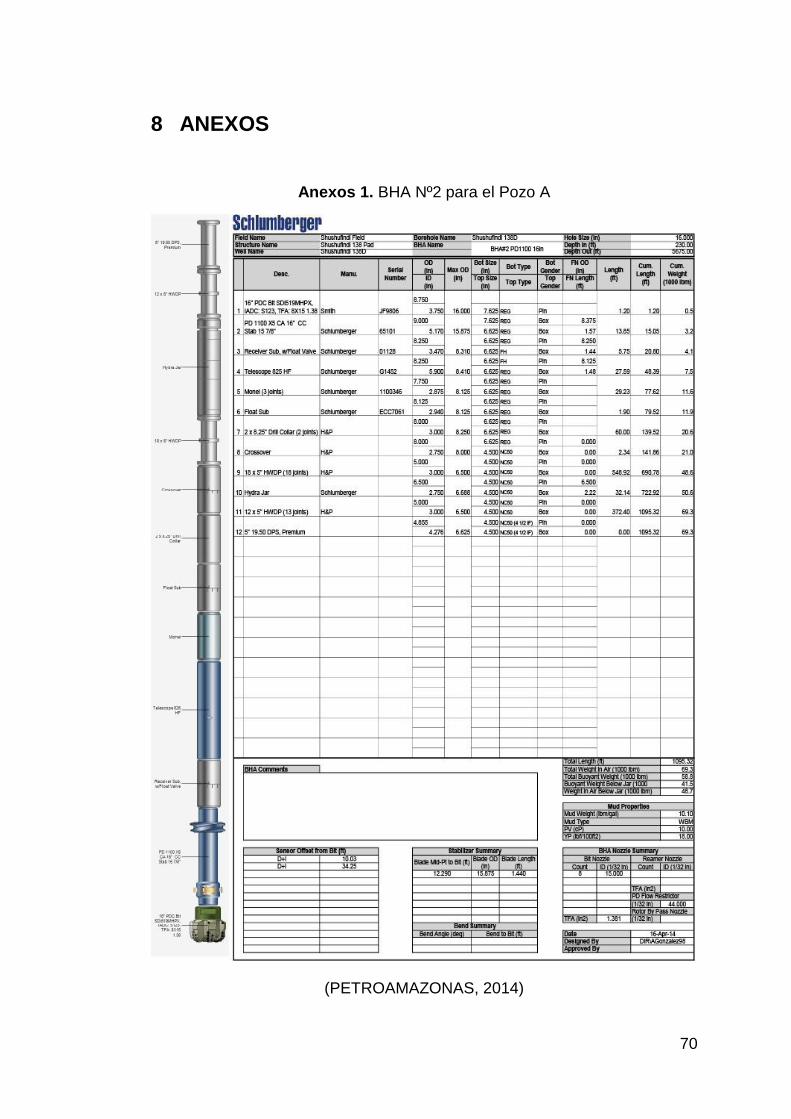
70
8 ANEXOS
Anexos 1. BHA Nº2 para el Pozo A
(PETROAMAZONAS, 2014)

71
Anexos 2. BHA Nº3 para el Pozo A
(PETROAMAZONAS, 2014)
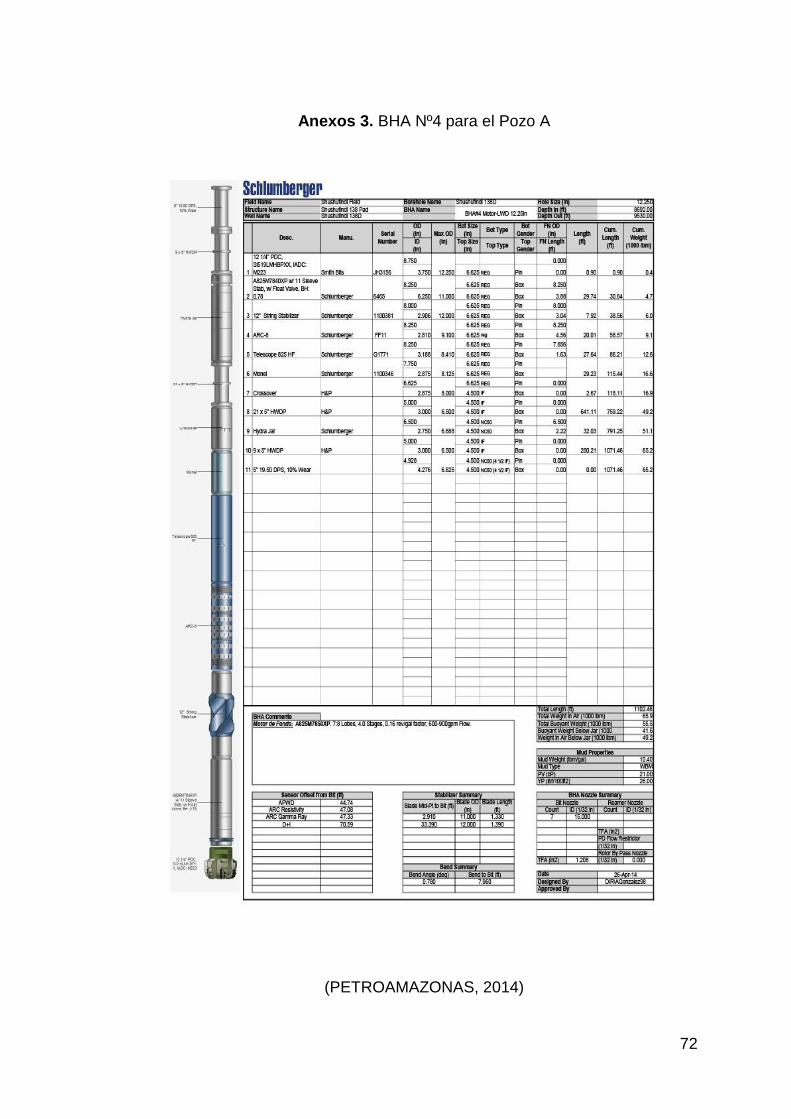
72
Anexos 3. BHA Nº4 para el Pozo A
(PETROAMAZONAS, 2014)

73
Anexos 4. BHA Nº5 para el Pozo A
(PETROAMAZONAS, 2014)

74
Anexos 5. BHA Nº2 para el Pozo B.
(PETROAMAZONAS, 2015)
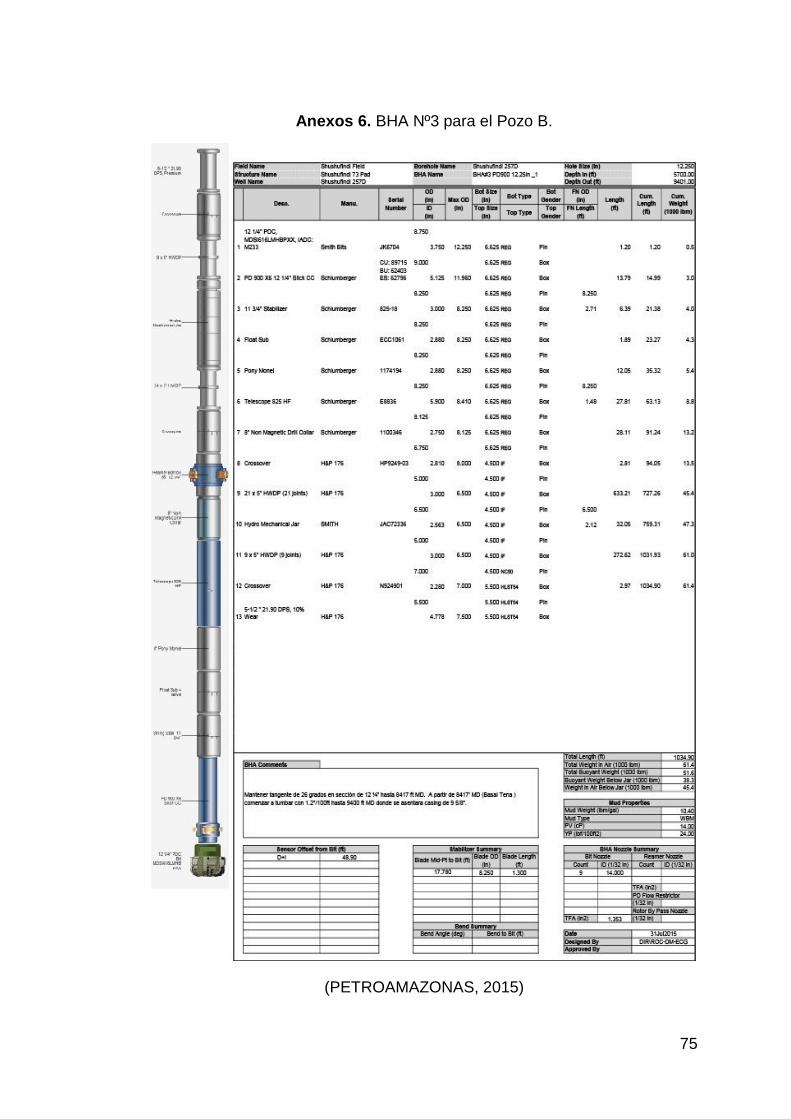
75
Anexos 6. BHA Nº3 para el Pozo B.
(PETROAMAZONAS, 2015)
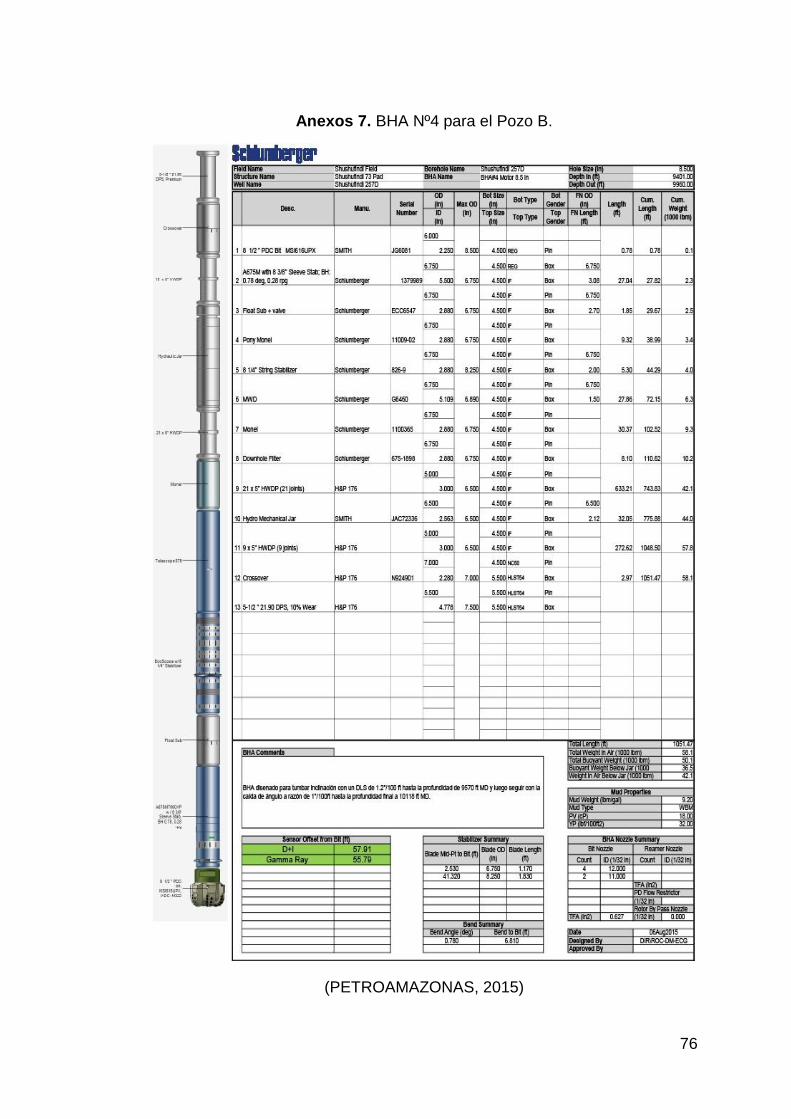
76
Anexos 7. BHA Nº4 para el Pozo B.
(PETROAMAZONAS, 2015)