Towards mixed-initiative, multi-robot field experiments: Design, deployment, and lessons learned
8
Towards Mixed-initiative, Multi-robot Field Experiments: Design, Deployment, and Lessons Learned Jnaneshwar Das * , Thom Maughan † , Mike McCann † , Mike Godin † , Tom O’Reilly † , Monique Messié † , Fred Bahr † , Kevin Gomes † , Frédéric Py † , Jim Bellingham † , Gaurav S. Sukhatme * , Kanna Rajan † * Robotic Embedded Systems Laboratory, Department of Computer Science, University of Southern California {jnaneshd,gaurav}@usc.edu † Monterey Bay Aquarium Research Institute, Moss Landing, California {tm,mccann,godin,oreilly,monique,flbahr,kgomes,fpy,jgb,kanna.rajan}@mbari.org Abstract—With the advent of Autonomous Underwater Ve- hicles (AUVs) and other mobile platforms, marine robotics have had substantial impact on the oceanographic sciences. These systems have allowed scientists to collect data over temporal and spatial scales that would be logistically impos- sible or prohibitively expensive using traditional ship-based measurement techniques. Increased dependence of scientists on such robots has permeated scientific data gathering with future field campaigns involving these platforms as well as on entire infrastructure of people, processes and software, on shore and at sea. Recent field experiments carried out with a number of surface and underwater platforms give clues to how these technologies are coalescing and need to work together. We highlight one such confluence and describe a future trajectory of needs and desires for field experiments with autonomous marine robotic platforms. Our 2010 inter- disciplinary experiment in the Monterey Bay involved multiple platforms and collaborators with diverse science goals. One important goal was to enable situational awareness, planning and collaboration before, during and after this large-scale collaborative exercise. We present the overall view of the experiment and describe an important shore-side component, the Oceanographic Decision Support System (ODSS), its impact and future directions leveraging such technologies for field experiments. I. I NTRODUCTION AND MOTIVATION With the advent of sophisticated onboard sensors and marine robotic platforms, scientific field experiments have become increasingly reliant on autonomous systems. An early multi-robot deployment, the Autonomous Ocean Sam- pling Network (AOSN) [1], demonstrated the utility of ensembles of robots in the coastal ocean targeting a specific set of questions in physical oceanography. The goals included resolving various phenomena such as ocean circulation, frontal dynamics, ocean heat flux, and subduction. Net- worked buoys, propelled AUVs and gliders were utilized in conjunction with predictions from ocean circulation models. Future capabilities in intelligent control, docking, power management, advanced materials and data management were clearly articulated. Initial deployments starting in the Arctic with a single platform were followed by subsequent deploy- ments with multiple AUVs and gliders in the Monterey Bay. Mixed-initiative deployments: Recent developments in robotic control, data systems, and sensor hardware have led to greater emphasis on software, both on-board and on-shore. Adaptive control techniques [2], [3] have allowed AUVs Fig. 1: Spatiotemporal extent of a red-tide in the Monterey Bay, CA in 2007 shown in false color remote sensing data. and surface craft to sample precisely in the coastal ocean. Yet, human-in-the-loop operations are necessitated given the tremendous cognitive and experiential skills of a trained scientist, the need to substantially augment ocean model skill and limits to machine intelligence. Further, the need to understand dynamic coastal ocean biogeochemical processes which have poor computational analogs has highlighted the need for mixed-initiative robotic control in this domain [4]. Multiple-robots for synopticity: Often, these coastal processes have large variations in spatial and temporal scales (from millimeters to kilometers in extent, in the order of hours to weeks and potentially months). A prominent ex- ample of such a process is coastal algal bloom ecology. As shown in Fig. 1, such blooms are dynamic, patchy, and could cover large coastal zones (> 50 Sq Km.). Persistent observation of such dynamic events dictates the use of multiple long-duration mobile robotic platforms [5] which can also be retargeted based on evolving observational needs, or simply for tracking an advecting 1 feature such as an algal hotspot. Smart robots are not enough: Using robotic assets for adaptive environmental sampling has been the focus of a large body of work in computer science including [6]–[8]. Often, observation of such dynamic and patchy environmental phenomena calls for the multi-week collaboration of multiple institutions with a wide range of 1 Horizontal transport of a patch of water due to currents.
Transcript of Towards mixed-initiative, multi-robot field experiments: Design, deployment, and lessons learned

Towards Mixed-initiative, Multi-robot Field Experiments:Design, Deployment, and Lessons Learned
Jnaneshwar Das∗, Thom Maughan†, Mike McCann†, Mike Godin†,Tom O’Reilly†, Monique Messié†, Fred Bahr†, Kevin Gomes†, Frédéric Py†,
Jim Bellingham†, Gaurav S. Sukhatme∗, Kanna Rajan†∗Robotic Embedded Systems Laboratory, Department of Computer Science, University of Southern California
{jnaneshd,gaurav}@usc.edu†Monterey Bay Aquarium Research Institute, Moss Landing, California
{tm,mccann,godin,oreilly,monique,flbahr,kgomes,fpy,jgb,kanna.rajan}@mbari.org
Abstract— With the advent of Autonomous Underwater Ve-hicles (AUVs) and other mobile platforms, marine roboticshave had substantial impact on the oceanographic sciences.These systems have allowed scientists to collect data overtemporal and spatial scales that would be logistically impos-sible or prohibitively expensive using traditional ship-basedmeasurement techniques. Increased dependence of scientistson such robots has permeated scientific data gathering withfuture field campaigns involving these platforms as well ason entire infrastructure of people, processes and software, onshore and at sea. Recent field experiments carried out witha number of surface and underwater platforms give cluesto how these technologies are coalescing and need to worktogether. We highlight one such confluence and describe afuture trajectory of needs and desires for field experimentswith autonomous marine robotic platforms. Our 2010 inter-disciplinary experiment in the Monterey Bay involved multipleplatforms and collaborators with diverse science goals. Oneimportant goal was to enable situational awareness, planningand collaboration before, during and after this large-scalecollaborative exercise. We present the overall view of theexperiment and describe an important shore-side component,the Oceanographic Decision Support System (ODSS), its impactand future directions leveraging such technologies for fieldexperiments.
I. INTRODUCTION AND MOTIVATION
With the advent of sophisticated onboard sensors andmarine robotic platforms, scientific field experiments havebecome increasingly reliant on autonomous systems. Anearly multi-robot deployment, the Autonomous Ocean Sam-pling Network (AOSN) [1], demonstrated the utility ofensembles of robots in the coastal ocean targeting a specificset of questions in physical oceanography. The goals includedresolving various phenomena such as ocean circulation,frontal dynamics, ocean heat flux, and subduction. Net-worked buoys, propelled AUVs and gliders were utilized inconjunction with predictions from ocean circulation models.Future capabilities in intelligent control, docking, powermanagement, advanced materials and data management wereclearly articulated. Initial deployments starting in the Arcticwith a single platform were followed by subsequent deploy-ments with multiple AUVs and gliders in the Monterey Bay.
Mixed-initiative deployments: Recent developments inrobotic control, data systems, and sensor hardware have ledto greater emphasis on software, both on-board and on-shore.Adaptive control techniques [2], [3] have allowed AUVs
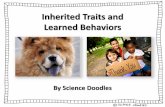
Fig. 1: Spatiotemporal extent of a red-tide in the Monterey Bay,CA in 2007 shown in false color remote sensing data.
and surface craft to sample precisely in the coastal ocean.Yet, human-in-the-loop operations are necessitated given thetremendous cognitive and experiential skills of a trainedscientist, the need to substantially augment ocean modelskill and limits to machine intelligence. Further, the need tounderstand dynamic coastal ocean biogeochemical processeswhich have poor computational analogs has highlighted theneed for mixed-initiative robotic control in this domain [4].
Multiple-robots for synopticity: Often, these coastalprocesses have large variations in spatial and temporal scales(from millimeters to kilometers in extent, in the order ofhours to weeks and potentially months). A prominent ex-ample of such a process is coastal algal bloom ecology.As shown in Fig. 1, such blooms are dynamic, patchy, andcould cover large coastal zones (> 50 Sq Km.). Persistentobservation of such dynamic events dictates the use ofmultiple long-duration mobile robotic platforms [5] whichcan also be retargeted based on evolving observational needs,or simply for tracking an advecting 1 feature such as an algalhotspot.
Smart robots are not enough: Using robotic assetsfor adaptive environmental sampling has been the focusof a large body of work in computer science including[6]–[8]. Often, observation of such dynamic and patchyenvironmental phenomena calls for the multi-weekcollaboration of multiple institutions with a wide range of
1Horizontal transport of a patch of water due to currents.

assets resulting in increased observation scales and spatio-temporal resolution. For such experiments, besides onboardautonomy and adaptive sampling strategies, it is necessaryto develop tools to engender planning and collaborationtechniques that allow such seamless knowledge transferbetween participants whether on ship or shore.
Our work is situated in the context of a multi-year inter-disciplinary program called Controlled, Agile and NovelObserving Network (CANON) [9]. The program focuses onunderstanding rapidly changing ocean processes that havesignificant impact on global ecosystems. The initial emphasisis on phytoplankton blooms that have a wide impact onmarine ecology e.g., via generation of conditions harmfulto other organisms in the case of Harmful Algal Blooms(HABs). However, the drivers and biogeochemical processesbehind phytoplankton bloom initiation, evolution and col-lapse are not well understood. This is due in part to thecomplex interactions between the members of the microbialcommunities (including phytoplankton) and the surroundingenvironment.
One of the goals of CANON is to develop and demonstratetechnologies that allow the quantitative characterization ofdynamic biological processes, in situ. This will enable anew mode of ocean observation, specifically by focusing onspatial and temporal scales typical of microbial processes.By using a multi-vehicle robotic system that is capable ofexecuting a sampling strategy over an extended period, wecan observe the episodic nature of biological processes atsea in ways that have hitherto not been possible. In contrastto previous multi-platform field programs that have focusedon the physical ocean employing models with resolutionsof kilometers, our system will allow exploration of oceanecosystems with sub-kilometer and hourly resolution. Byconcentrating on the episodic, out-of-equilibrium events,where local perturbations produce detectable biological re-sponses, we expect to capture both the causality and thedynamics of biological processes. This information is crucialto understanding how the coastal ocean works and projectinghow they will adapt in the face of climate change.
Using lessons learned from prior work including previousfield deployments, we have designed, developed and de-ployed a shore-side Oceanographic Decision Support System(ODSS). The ODSS is a web-based portal used to assimilateinformation from a collection of sources at sea such asAUVs, moorings, radar stations and remote-sensing satel-lites, to provide a synthesis of views useful for predictingthe movement of bloom patches in the confines of northernMonterey Bay. The system-of-systems provided situationalawareness, data visualization, collaborative information shar-ing and planning capabilities for the first of CANON fieldprograms in Monterey Bay in October 2010.
Our work on ODSS is driven by a vision of how marinefield robotics will likely be conducted in the future andthe necessary computational infrastructure that will augmentdecision making, onshore as well as on-board. This view wasarrived at from our past efforts in mixed initiative planning
and control for NASA’s Mars Exploration Rovers program[10], [11], a data portal for AOSN [12], and JPL’s OceanPortal for Southern California Bight [13]. While the lattertwo provide data driven visualization and collaboration capa-bilities, the former provided inferential capabilities withoutan oncoming data stream. Ultimately ODSS will combinethese capabilities and more uniquely, provide an event re-sponse capability that could trigger the deployment of arobot and/or adapt its sampling strategy, all from a scientist’sdesktop on shore. Data returned from robotic assets at seawill be filtered for signals associated with a feature of interestalong with information on its contextual environment. Theassociation between the signal and a prospective event will beundertaken through tagging by experts, and machine learningtechniques used in recommender systems [14]. Adaptivesampling strategies using an onboard autonomous system T-REX [3], [15], [16], and working with shore-side humanand automated capability can then become an extension ofthe human senses.
This paper describes the ODSS use within the contextof the CANON 2010 field experiment. We discuss thechallenges faced, lessons learned and present examples ofhow marine robotics will be served by such mixed-initiativedecision support systems in the future. Section II describesthe rationale behind ODSS and a description of its architec-ture. Section III discusses a few case studies highlighting theevolution of ODSS during CANON 2010, followed by assetdeployment and usage statistics. Finally, we summarize thelessons learned in Section IV and wrap up our work withour vision for marine experiments in the future.
II. EXPERIMENT DESIGN AND IMPLEMENTATION
In this section, we will start by describing CANON andits goals, followed by a discussion on the need for ODSSand a description of its architecture and evolution.
A. CANON
The month-long CANON field experiment in October2010 involved multiple platforms with diverse capabilitiesand payloads, multiple science goals and multiple principleinvestigators (PIs). Platforms included autonomous underwa-ter vehicles (AUVs), surface robots, research vessels, mannedairplanes, moorings and Lagrangian drifters. Most vehiclesrequired charging cycles at regular intervals; others like thesolar powered Wave Glider or the Tethys long-range AUV(LRAUV) were persistent over the span of weeks.
a) Experiment goals: A core goal for the CANON fieldinitiative in October 2010 was to observe the evolution ofphytoplankton blooms in Monterey Bay. These blooms aredynamic, moved around by ocean currents while impactedby its ecological life-cycle. They can be observed using datafrom remote-sensing satellites that capture the algal biomassin the upper 1 to 2m of the water column. However, this datais infrequent and dependent on weather conditions and oftenneeds to be augmented by ship-based observation. Hence,once a bloom is detected, robotic assets are deployed to mapthe extent of the bloom, which is then tagged by Lagrangian

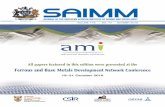
(a) (b)Fig. 2: The Oceanographic Decision Support System (ODSS) being used at a daily planning-meeting during the October 2010 CANONfield experiment.
drifters serving as proxy for the blooms advection. TheseGPS tracked devices help in the redeployment of assets basedon observed advection patterns. Forecasts for a few physicaland biological phenomena are obtained from ocean modelsto aid this process.
b) Conception and evolution of ODSS: The ODSSwas conceptualized to help maintain situational awarenessduring the CANON experiment, designed to be agile torespond to rapidly changing bloom dynamics. As the ex-periment progressed, new insights were developed and use-cases formulated, leading to the recommended inclusion ofmany features into ODSS. These features were desirable tosupport multi-robot, mixed-initiative experiments planned forCANON. Fig. 3 illustrates the evolution of ODSS in responseto the experimental needs of CANON. While monitoringassets in real-time helped decision making, visualization ofscientific data products was desirable to improve situationalawareness. This entailed viewing where robotic and mannedassets were located, along with the data they were observingin the water-column, and potentially what they would likelyobserve based on predictive ocean models. In addition,ODSS served as a collaborative space where data, ideas andprocessed information would be shared and be persistent.As the experiment progressed, the complexity of dealingwith evolving science hypotheses and the correlation betweenwhere the robots were sampling became increasingly tenu-ous. This was one driver for the desire to coordinate multiplerobots out in the field; the other and equally important needwas that of observing a field with a large spatio-temporalextent.
c) Planning deployments: Deployment planning oc-curred on a daily basis during the experiment to re-targetassets to track the advecting patches. Daily morning plan-ning meetings were prefaced either by data available fromovernight missions or from short AUV missions targetinglast known patch positions especially since remote-sensingdata was sporadic due to weather constraints. Fig. 4 showsone such planning meeting with the ODSS on the screen,overlaid with mapped data products from the previous day’s
Situational Awareness
Asset deployment
Data products (observed by assets/
external products)generates
requiresincreases
goal
Fig. 3: An illustration of the rationale and evolution of ODSSfeatures.
Fig. 4: Communication channels and robotic assets in the seaduring the October 2010 experiment.
deployments. The data were analyzed and deliberated inthese meetings and a consensus arrived at on where, how andwith what assets to sample. These plans were disseminatedin text and diagrams via the on-line discussion mechanismof a standalone component of ODSS called the Collabora-tive Science (CoSci) portal. In the future, more structuredmethods of plan generation, dissemination, and integrationwill be included into the ODSS. In particular, we recognizethe need for logistical planning capabilities in ODSS tocapture deployment constraints on available research vessels,personnel and robotic assets.

Fig. 5: ODSS architectural block diagram, highlighting its sub-systems. The unshaded boxes show legacy subsystems that werecoupled with with newly developed subsystems (shaded boxes).
B. ODSS System Architecture
The ODSS was rapidly prototyped to generate an ap-plication with substantial back-end connectivity to existingMBARI databases and subsystems. Ease of use was the keyto advocacy and acceptance by the science users, hencedevelopment of a web based cross-platform and cross-OSusage was targeted. Feedback from the users during thefield experiment has been assimilated into a more formallyengineered system design for subsequent years use.
1) Front-end Design: Fig. 5 shows the ODSS’s systemarchitecture. At the core is a server that hosts the browser-based front-end and communicates with other subsystemsthat handle asset tracking, science data access and shore-side intelligence allowing a loose coupling between varioussubsystems some of which were legacy. For instance, an assettracking system was already in place; the ODSS requirementwas to interact with it to display up-to-date robot locations onan interactive map. The core web component of the ODSS,including the web-server and the front-end, was developedusing a standardized toolkit [17], chosen over other availableweb-stacks primarily for the rich user-experience of thefront-end and cross-browser support. The interactive front-end allowed overlay of science data with asset informationto provide consolidated views of the experiment status. Thevarious features of the ODSS front-end are as follows:
a) Asset Tracking: A core functionality for situationalawareness is monitoring of assets during deployment andmovement. An interactive map displays all active assetswith their current locations and a Dashboard provided asummary of asset locations with advertised parameters suchas speed and latitude/longitude. Additionally, asset trackswere highlighted with a history of up to a week. Fig. 2 showsa screenshot of the ODSS during the Fall experiment showing6 hour tracks on the map, with a listing on the dashboard.
b) Data Products: Overlay of scientific data productssuch as sea-surface temperature, sea-surface current, etc.allowed scientists to view current sea state and ongoingoceanographic phenomena within the context of deployedassets. This consolidated view facilitated asset re-taskingbased on the observations of features of interest. Some of thescience data products were available from third-party serversand others were cataloged and stored in CoSci. The ODSSprovided a mechanism to toggle multiple data products onthe interactive map. Fig. 6 shows a screenshot of ODSS withthe data products panel and the sea-surface current product
Fig. 6: A section of the ODSS showing sea-surface current fromthird party CeNCOOS server. The Data Products panel is locatedon the top-left corner.
on the asset map.c) Mission Plans: Mission plans specifying the basic
deployment information for specific assets with the surveypath to follow, could be overlaid on the ODSS on-demand.This allowed planners to view the overall coverage and attimes, repeat previously executed plans if necessary.
d) Asset Playback: An important request from sci-ence collaborators was for instant recall of asset locations;knowing the past was important for planning future datagathering. This feature of ODSS allowed playback of theasset movement between specified start and end dates andused for analysis of asset deployment and movement for priormissions.
2) Back-end Subsystems: The ODSS design leveragedlegacy systems used for collating and archiving data prod-ucts. While these systems were in use as standalone entities,harnessing their power as part of the human-in-the-loopdecision making process was novel.
a) Tracking subsystem: The ODSS was built on top ofMBARI’s asset tracking subsystem, an existing infrastructureto track and log locations of research vessels, moorings andother near-shore equipment in real-time. Robotic assets thattook part in the field experiment were tracked either viasatellites or via radio links to shore. Asset information wasstored in a tracking database and obtained either directlyfrom the database, or through an HTTP API. For ourdeployment, the tracking subsystem stored information for avariety of assets such as propelled AUVs, gliders, moorings,Lagrangian drifters, research vessels, surface crafts and aresearch aircraft carrying an imaging sensor. This in turnallowed retrieval of information from past experiments andmissions and useful for the playback functionality.
b) Science data repository: The ODSS’ Data Productsfeature uses data cataloged by CoSci, which consists of aback-end data aggregator that periodically crawls multipleexternal servers to fetch and store data products of interest.The list of data sources to aggregate was initialized before theexperiment and continually appended during the experimentas new collaborators joined the effort and derived dataproducts became available. ODSS obtains a select list of dataproducts from CoSci for overlaying on the interactive map.Additionally, CoSci includes a data visualization portal thatallows direct access to scientific data products it acquiredand which was integrated into the ODSS.

III. USAGE AND IMPACT
To highlight the evolution and use of the ODSS, wearticulate three different case studies, followed by a summaryof asset deployment and usage statistic.
A. Case Studies
1) Forecasting and planning: A virtual drifter function-ality was required early in the field experiment to perform aLagrangian patch tracking experiment involving the DoradoAUV. The goal was to extend Lagrangian observation studiescarried out in June and September 2010 [18] to coastalwaters where surface current forecasts are available, aided byHF Radar measurements and surface ocean current models.Traditional methods would call for a physical drifter to bedispatched in the vicinity of the study area, as a stand-in fora patch centroid, for tracking by manned vessels. Using thevirtual drifter, the projected trajectory of waypoints of thepatch was marked within the ODSS, and sent to the DoradoAUV; the automated planner onboard sub-sampled the virtualdrifter waypoints and planned the vehicle trajectory. Thisfeature was also used to analyze the estimated trajectory of ahotspot to guide future asset and AUV deployment as shownin Fig. 7a.
An interactive validation tool was also developed to aidhuman operators to check for constraints such as distance toshore for safe operation. This was particularly useful whendeciding to target a virtual drifter track for the Dorado andallowed operators to cross-check AUV tracks with potentialviolations of near-shore operating constraints. Fig. 7b showsa screenshot of validations on all platforms on the ODSSmap.
2) Visualization of real-time science data from roboticassets: Most platforms operating in the field experimentprovided data with a lag of a few hours. AUV data wastypically received every few hours over satellite and dataon manned vessels were recovered once they returned toshore each day. The Wave Glider [19] a unique solar poweredsurface platform took measurements at two depths and trans-mitted them back in near real-time. Fluorometry and locationinformation from this platform was fed to the ODSS (Fig.8) to serve both as a demonstration of real-time streamingon the asset map as well as for early detection of bloomhotspots.
3) Multi-AUV drifter tracking experiment: A key objec-tive of this deployment was to track a water patch withmultiple assets. An opportunity to have two AUVs withdifferent payloads and characteristics tracking a patch camelate in the experiment. The Tethys AUV was deployed withina known algal hotspot and tasked with tracking the patchand publishing the updated patch center every hour with theDorado AUV observing the contextual environment in a 3kmX 3km box around this centroid. Further, since the patchwas sufficiently close to shore, operational constraints onthe Dorado AUV were placed necessitating it be commandedfrom shore. The patch centroid sent from Tethys was updatedon the tracking subsystem and displayed on ODSS; a humanoperator observed the patch location on the ODSS and
Fig. 8: Real-time chlorophyll concentration data updated every twominutes from the Wave Glider [19].
Fig. 9: ODSS during multi-AUV experiment highlighting thechlorophyll patch, AUV Dorado, and AUV Tethys. Tethys estimatedthe patch center marked as ’CHL_PATCH’, which was trackedby the tracking subsystem. The Dorado was then commandedto perform a survey around this patch, taking water samples atchlorophyll peaks [20].
commanded the Dorado AUV running T-REX, to performsurveys around the identified patch center while taking watersamples using its onboard samplers. The operator’s role wasto be a filter; to ensure that the centroid was over sufficientdepth on the shelf and not heading towards shore and thendispatching the centroid location. T-REX on the DoradoAUV then synthesized the survey plan automatically and thenexecuted the plan without human intervention. Fig. 9 showsa screenshot of ODSS during the multi-AUV patch trackingexperiment, showing the chlorophyll patch. An inlay of thedashboard status for the patch shows the patch location,course, and speed.
B. Usage statistics
We generated deployment statistics for the field exper-iment by using data logged by the tracking sub-system.Specifically, we looked at the sum-total duration each assetthat was deployed and active each day as the asset activityand measured in ’platform-days’. Then, we determined thevisitor-count to ODSS from the access logs of its web-server. This was computed using well-established techniquesto monitor web site usage. Each visit is considered to bea unique session by a user from a particular IP address.Fig. 10 shows the plots of asset activity and ODSS visitorcount for each day of October 2010. We observe a strongcorrelation between the experiment activity and ODSS usage

(a) Virtual drifter functionality (b) A validation tool for all assets to check distance-to-shore
Fig. 7: Virtual functionalities within the ODSS
Fig. 10: Plot of daily platform activity measured in platform-days,and ODSS usage, measured in unique visiter count for the days ofOctober 2010.
highlighting the role the ODSS played during the experiment.Additionally, we plotted the total distance traveled and
time active for each asset; Fig. 11a shows the combined plotof the total distance traveled and the active deployment timefor each asset. This figure highlights the diverse nature ofassets taking part and also the temporal extent of observa-tions, with the research vessel R/V Point Sur being active foraround 22 days, covering ∼ 2100 km. To highlight the spatialcoverage of all assets, we generated an asset track plot usingGoogle Earth ?? shown in Fig. 11b, clearly highlighting theintense activity in northern Monterey Bay.
IV. LESSONS LEARNED
The October field experiment was a preliminary steptowards understanding the key functionalities necessary forscientifically driven field experiments in the coastal ocean.While the basic requirements of situational awareness, datacollation and analysis were evident a priori, the processbehind such large scale experimentation in the domain havenever been closely analyzed for projection towards futurecomputational needs. We offer some key lessons learned forthe field of marine robotics:
• Multi-vehicle coordination and control is a central needfor science - As marine robotics plays an increasinglyimportant role in science and robots are more ubiq-uitous in field experimentation, scientists are likely tochallenge design scales of such experiments. Currentdeployments might be multi-institutional/multi-PI; how-ever the currently informal models of experiment designare giving way to more organized, event-driven and
reactive operation across a meso-scale (> 50 Sq. km).Dynamic processes varying in time will also be thesubject of study requiring a mix of vehicles with varyingpayloads and speeds thru the water-column. The scaleof experimentation is therefore likely to increase withmore robotic assets in the water and with increasingneed to coordinate their deployment and sampling.
• Event Response scenarios will often drive experimenta-tion - With our relatively poor understanding of coastalocean processes and the challenges current ocean mod-els pose in prediction, increasing reliance on MachineLearning and Data Mining techniques will play a criticalrole in data driven experimentation. Such computationtechniques, whether on shore on onboard, will providerapid assessment towards evolving science goals andwill require new approaches to statistical interpretationsof ensemble sensor data.
• Sampling and retrieval for lab analysis is an importantaspect of vehicle control - Traditional ship-based ap-proaches to water sampling are not sustainable; robotsand robot control will play an important role in fur-thering this aim in large scale field experimentation.This requires an important problem of “when and whereto sample” to be coupled with in-situ sensor readingsand the environmental context. Adaptive sampling ap-proaches will need to be investigated which consider anensemble of robots as one adaptable system to observebiogeochemical activity along differing scales.
• What-if scenarios are integral - During the course of ourFall experiment, effort was expended to decide on theplacement of the various assets. Science participants arealready asking for multiple scenario flows for “what if”analysis; with increasing use of multiple and heteroge-neous robots in such experimentation, this need will becritical to fulfill. While some predictive ocean modelingcapability will be useful with enhanced model skillin the future, simpler techniques such as the “virtualdrifter” for patch tracking can and should be leveraged.
• Asynchronous (human) communication is highly desir-able - Historically, scientifically driven robotic fieldexperiments, whether in the marine or terrestrial do-mains, have focused on technologists and scientists to

(a) Total distance traveled and active operational time for platforms (b) Asset tracksFig. 11: Asset deployment statistics for the 2010 field experiment
be co-located [21]–[25]. In part this has been drivenby the fine tuning of the technology for deploymentand coordination with science to ensure that appropriatescience data are returned; analysis of science data wasby and large post-facto of the experiment. With marinerobots becoming more robust as well as prevalent in thesciences, the focus of attention has turned to software,both for control as well as data gathering and analysisand one that can be modified based on ongoing needs.This in turn has lessened the need for close person-to-person coordination on deployment aspects, but in-creased the spotlight on data centric activities which donot necessarily require in-person presence. This trendtowards remote and geographically disparate operationshas also shown a side benefit associated with that ofparticipation and inclusion in science teams.
• Handling data from disparate sources is inevitable -Payloads and platforms in the ocean sciences are oftencustomized towards longer term science or technologygoals. Participants in large-scale field deployments oftenarrive with differing platforms and sensor payloads.However, such large field deployments are not just aboutgathering data but also continuous scientific analysisto spot and respond to dynamic events in the coastalocean. Data obtained in-situ are often sent via differentcommunication streams (locally via freewave or 802.11,via 3G or Iridium or Globalstar satellites) in differingformats (e.g raw text, binary, comma separated CSVfiles, with or without meta-data tags). Since communica-tions especially in coastal deployments is less onerous,the expectations of situational awareness requires thatdata be gathered in near or quasi real-time with con-tinuing/continuous science analysis. This requires thatsupport tools onshore be capable of coalescing data inways that are interpretable by humans to drive a (near)real-time response to evolving science and technologyneeds.
• Situational awareness is important; but so is knowingthe intent of activity in the past - Marine sciencedriven field experiments are brief bursts of activity in a
nominal academic calendar. To maximize the time andexpense involved, continuous deployment and operationare highly desirable. This results in having a contin-uous stream of experiments and results that need tobe planned for. Activities in the present are thereforeinformed by the near past; to understand the currentstate of deployment of assets, therefore it is criticalto understand and archive the motivation and intentof the recent science and technology drivers. In thiscontext, disparate assets and their associated operationaland logistical constraints need to be tracked over thetemporal window of the evolving experiment and thescientific or technological intent needs to be recordedfor subsequent use.
• Responding to evolving needs drives rapid softwareprototyping - The above need in turn drives another re-quirement; namely that mechanisms be in place to allowfor different approaches for data interpretation which inturn require that tools be rapidly prototyped to keeppace with such evolving needs during experimentation.
V. WHAT ABOUT THE FUTURE?
Marine robotics is a viable and healthy field not onlybecause it offers a challenging domain in which to undertakethe science of robotics, but because there are importantand complex science themes like global climate changethat need better tools for human understanding. Littoralhomeland security in the wake of recent events has shown theimportance of autonomous surface robots while traditionalmine counter measure scenarios are increasingly driven byunderwater robotic devices. Given our experience in an inter-disciplinary field experiment for an extended period of timeand with multiple heterogenous marine robots, we believewe can look forward at least a decade to predict how suchoceanographic experiments will impact the field of marinerobotics while looking back to the past 50 years.
Oceanography is already at a cusp; robotics will furtherenable and transform the move from an expeditionary to anobservatory mode at a faster pace. Multiple robots coordi-nated from shore via communication networks (Inter/intra

nets, satellite communication links, local area networks) willbe the norm with increasing reliance on visual means of com-mand and control. Scientists will no longer be constrainedto be co-located to assign operations personnel (or graduatestudents) the task of commanding the assets; they woulddo so themselves, with the robots becoming extensions ofthe human senses. Drag and drop interfaces within browsersor standalone apps will be used for targeted planning andcontrol of AUVs and other autonomous platforms, whileshore-based algorithms would generate plan sketches formixed-initiative coordination plans where multiple assets areinvolved. Major advances in data interpretation, visualizationand event tracking driven by advances in automated MachineLearning techniques will drive event-response scenarios.More tightly integrated lab automation with field experimentsvia ODSS like technologies will allow model-derived priorsto drive such statistical based inference while also providingfaster ground truth authentication for hypotheses generatedby scientists from autonomously retrieved water samples.Communications under water might still be a challenge; butshore-side support coupled with portable network nodes willprovide a variety of local area network support for vehicleswhen on the surface.
With these advances, we see a great need to focus onmulti-vehicle sampling techniques; adaptive sampling strate-gies will need to scale for those from single to multiplevehicles. Advances in ocean model driven deployments willincrease with increasing model skill, but vehicle autonomyand control will continue to drive data driven exploration.Ultimately roboticists will drive and be driven by scientificoceanographic and military challenges more substantially byparticipating and being entrained to participate in large fielddeployments.
VI. ACKNOWLEDGMENTS
Das and Sukhatme are supported in part by the NOAAMERHAB program under grant NA05NOS4781228 and byNSF as part of the Center for Embedded Network Sensing(CENS) under grant CCR-0120778, by NSF grant CNS-1035866, by the ONR MURI program (grants N00014-09-1-1031 and N00014-08-1-0693) by the ONR SoA programand a gift from the Okawa Foundation. MBARI authorsare supported by a block grant from the David and LucillePackard Foundation. In addition, we wish to thank our fellowcollaborators at MBARI Francisco Chavez, Julio Harvey,John Ryan, Chris Scholin and Robert Vrijenhoek as wellas the crew of the R/V Zephyr for their valuable support.
REFERENCES
[1] T.B. Curtin and J.G. Bellingham and J. Catipovic and D. Webb, “Au-tonomous Ocean-Sampling Networks,” Oceanography, vol. 6, no. 3,pp. 86–94, 1993.
[2] E. Fiorelli, N. E. Leonard, P. Bhatta, D. A. Paley, R. Bachmayer,and D. M. Fratantoni, “Multi-auv control and adaptive sampling inmonterey bay,” in IEEE Journal of Oceanic Engineering, 2004, pp.935–948.
[3] C. McGann, F. Py, K. Rajan, J. P. Ryan, and R. Henthorn, “AdaptiveControl for Autonomous Underwater Vehicles,” in AAAI, Chicago, IL,2008.
[4] F. Py, J. Ryan, T.O.Reilly, H. Thomas, and K. Rajan, “Following OceanFronts by Dynamically Retargeting AUVs from Shore,” Med. MarineSci. J., Spl. Issue on AUVs, 2010, submitted, under review.
[5] Y. Zhang, J. G. Bellingham, and Y. Chao, “Error analysis and samplingstrategy design for using fixed or mobile platforms to estimate oceanflux,” Journal of Atmospheric and Oceanic Technology, vol. 27, no. 3,pp. 481–506, 2010.
[6] M. Rahimi, R. Pon, W. J. Kaiser, G. S. Sukhatme, D. Estrin, andM. Srivastava, “Adaptive sampling for environmental robotics,” in InIEEE International Conference on Robotics and Automation, 2003,pp. 3537–3544.
[7] B. Zhang and G. Sukhatme, “Adaptive sampling for estimating a scalarfield using a robotic boat and a sensor network,” in IEEE InternationalConference on Robotics and Automation, 2007.
[8] K. H. Low, “Multi-robot adaptive exploration and mapping for envi-ronmental sensing applications,” Ph.D. dissertation, Carnegie MelonUniversity, 2009.
[9] “CANON: Controlled, Agile and Novel Observing Network.”[Online]. Available: http://www.mbari.org/canon/
[10] M. Ai-Chang, J. Bresina, L. Charest, A. Chase, J. Hsu, A. Jonsson,B. Kanefsky, P. Morris, K. Rajan, J. Yglesias, B. Chafin, W. Dias, andP. Maldague, “MAPGEN: Mixed Initiative Planning and Schedulingfor the Mars’03 MER Mission,” IEEE Intelligent Systems, vol. 19,no. 1, 2004.
[11] J. Bresina, A. Jonsson, P. Morris, and K. Rajan, “Activity Planning forthe Mars Exploration Rovers,” in ICAPS, Monterey, California, 2005.
[12] M. Godin, J. G. Bellingham, K. Rajan, Y. Chao, and N. Leonard, “ACollaborative Portal for Ocean Observatory Control,” in Proc OceansMTS/IEEE Conference, Boston, MA, 2006.
[13] P. Li, Y. Chao, Q. Vu, Z. Li, J. Farrara, H. Zhang, and X. Wang,“OurOcean - An Integrated Solution to Ocean Monitoring and Fore-casting,” in Proc Oceans MTS/IEEE Conference, Boston, MA, 2006.
[14] G. Adomavicius and A. Tuzhilin, “Toward the next generation ofrecommender systems: A survey of the state-of-the-art and possibleextensions,” IEEE Transactions on Knowledge and Data Engineering,vol. 17, pp. 734–749, 2005.
[15] F. Py, K. Rajan, and C. McGann, “A Systematic Agent Frameworkfor Situated Autonomous Systems,” in 9th International Conf. onAutonomous Agents and Multiagent Systems, Toronto, Canada, May2010.
[16] J. P. Ryan, S. Johnson, A. Sherman, K. Rajan, F. Py, J. Paduan, andR. Vrijenhoek, “Intermediate Nepheloid Layers as Conduits of LarvalTransport,” Limnology & Oceanograhy: Methods, vol. 8, pp. 394–402,2010.
[17] “Google Web Toolkit.” [Online]. Available:http://code.google.com/webtoolkit/
[18] J. Das, F. Py, T. Maughan, T. O’Reilly, M. Messie, J. Ryan, K. Rajan,and G. Sukhatme, “Simultaneous Tracking and Sampling of DynamicOceanographic Features with Autonomous Underwater Vehicles andLagrangian Drifters,” in Intnl. Symp. on Experimental Robotics (ISER),New Delhi, India, 2010.
[19] S. Willcox, J. Manley, and S. Wiggins, “The Wave Glider, an energyharvesting autonomous surface vessel,” Sea Technology, pp. 29–31,November 2009.
[20] Y. Zhang, R. S. McEwen, J. P. Ryan, and J. G. Bellingham, “Designand tests of an adaptive triggering method for capturing peak samplesin a thin phytoplankton layer by an autonomous underwater vehicle,”in IEEE Journal of Oceanic Engineering, vol. 35, 2010, pp. 785–796.
[21] S. W. Squyres et al., “The spirit rover’s athena science investigation atgusev crater, mars,” Science, vol. 305, no. 5685, pp. 794–799, 2004.
[22] J. Bellingham and K. Rajan, “Robotics in Hostile Environments,”Science, vol. 300, no. 5893, 2007.
[23] S. Ramp et al., “Preparing to predict: The second autonomous oceansampling network (aosn-ii) experiment in the monterey bay,” DeepSea Research Part II: Topical Studies in Oceanography, vol. 56, no.3-5, pp. 68 – 86, 2009.
[24] D. Wettergreen, M. D. Wagner, D. Jonak, V. Baskaran, M. Deans,S. Heys, D. Pane, T. Smith, J. Teza, D. R. Thompson, P. Tompkins,and C. Williams, “Long-distance autonomous survey and mapping inthe robotic investigation of life in the atacama desert,” in InternationalSymposium on Artificial Intelligence, Robotics and Automation inSpace (iSAIRAS), February 2008.
[25] T. W. Fong et al., “Robotic follow-up for human exploration,” in Space2010. AIAA, September 2010, pp. AIAA–2010–8605.