ТОМ 2 - Единое окно доступа к образовательным ресурсам
146
ФУНДАМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ И ИННОВАЦИИ В НАЦИОНАЛЬНЫХ ИССЛЕДОВАТЕЛЬСКИХ УНИВЕРСИТЕТАХ Материалы Всероссийской научно-методической конференции ТОМ 2 Санкт-Петербург Издательство Политехнического университета 2012
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of ТОМ 2 - Единое окно доступа к образовательным ресурсам
ФУНДАМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ И ИННОВАЦИИ В НАЦИОНАЛЬНЫХ
ИССЛЕДОВАТЕЛЬСКИХ УНИВЕРСИТЕТАХ
Материалы Всероссийской научно-методической конференции
ТОМ 2
Санкт-Петербург Издательство Политехнического университета
2012
Министерство образования и науки Российской Федерации
Комиссия по образованию Санкт-Петербургского
научного центра Российской академии наук
Отделение энергетики, машиностроения, механики и процессов управления
Российской академии наук
Научный Совет по науковедению и
организации научных исследований
(при Санкт-Петербургском научном центре РАН)
Санкт-Петербургский государственный политехнический университет Ассоциация технических университетов
Международная академия наук высшей школы
Ассоциация технических университетов
России и Китая Координационный Совет
учебно-методических объединений и научно-методических советов
Минобрнауки РФ
Учебно-методическое объединение вузов России по университетскому политехническому образованию
ФУНДАМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ И ИННОВАЦИИ В НАЦИОНАЛЬНЫХ
ИССЛЕДОВАТЕЛЬСКИХ УНИВЕРСИТЕТАХ
Материалы Всероссийской научно-методической конференции
Том 2
Санкт-Петербург Издательство Политехнического университета
2012
Фундаментальные исследования и инновации в национальных исследова-
тельских университетах: Материалы Всероссийской научно-методической конферен-ции. Санкт-Петербург. Том 2. – СПб.: Изд-во Политехн. ун-та, 2012. 146 с.
Представлены результаты научных исследований, выполненных в национальных
исследовательских и других ведущих университетах Российской Федерации по планам работ РАН, федеральных научно-исследовательских программ, а также по заказам промышленности.
Для преподавателей, научных работников, аспирантов и студентов высших
учебных заведений.
Сборник издается без редакторской правки. Ответственность за содержание тезисов возлагается на авторов.
Оригинал-макет подготовлен НМЦ УМО. © Санкт-Петербургский государственный
политехнический университет, 2012
3
ОРГАНИЗАЦИОННЫЙ КОМИТЕТА. И. Рудской
(председатель)– ректор ФГБОУ ВПО «СПбГПУ»,
член-корреспондент РАНЮ. С. Васильев
(сопредседатель)– президент ФГБОУ ВПО «СПбГПУ»,
академик РАНВ. Н. Козлов
(зам. председателя)– заместитель председателя Совета УМО
по университетскому политехническомуобразованию
Д. Ю. Райчук – проректор ФГБОУ ВПО «СПбГПУ»П. И. Романов
(ученый секретарь)– директор НМЦ УМО
ФГБОУ ВПО «СПбГПУ»
ЧЛЕНЫ ОРГАНИЗАЦИОННОГО КОМИТЕТАА. В. Белоцерковский – ректор Тверского государственного
университетаМ. Б. Гузаиров – ректор Уфимского государственного
авиационного технического университетаМ. М. Благовещенская – проректор Московского государственного
университета пищевых производствВ. В. Глухов – проректор ФГБОУ ВПО «СПбГПУ»
В. В. Изранцев – ученый секретарь Санкт-Петербургскогоотделения МАН ВШ, проректорМеждународного банковского института
С. В. Коршунов – заместитель председателя Совета УМО поуниверситетскому политехническому образова-нию, проректор Московского государственноготехнического университета им. Н. Э. Баумана
В. Л. Петров – проректор Московского государственногогорного университета
Н. М. Розина – проректор Финансового университетапри Правительстве Российской Федерации
А. А. Шехонин – проректор Санкт-Петербургского государствен-ного университета информационныхтехнологий, механики и оптики
М. М. Радкевич – декан механико-машиностроительногофакультета ФГБОУ ВПО «СПбГПУ»
Н. Ю. Егорова – заместитель директора НМЦ УМОФГБОУ ВПО «СПбГПУ»
4
СЕКЦИЯ 3Энергетика, машиностроение,
механика и процессы управленияПРОБЛЕМЫ ВЫПОЛНЕНИЯ ПРОЕКТНЫХ РАБОТ
В СВЯЗИ С РЕФОРМИРОВАНИЕМ ЭЛЕКТРОЭНЕРГЕТИКИ
Абдуллазянов Э. Ю., Митрофанов А. Д.Казанский государственный
энергетический университет
Процесс перестройки энергетики породил ряд проблем, которые тре-буют скорейшего решения. За десятилетия была отработана определеннаясхема ввода новых объектов. Ведущие проектные институты с прицеломна десятилетия вперед разрабатывали планы развития электроэнергетики,согласуя их с общими планами развития регионов страны, ставя при этомперспективные задачи производителям электрооборудования. Параллель-но с типовыми проектами, которые доводились до всех профильных болеемелких организаций, головными проектными институтами выполнялисьсерьезные научные исследования, чтобы идти в ногу со временем и ис-пользовать их в новых проектных решениях.
В сегодняшней ситуации проектные «мастодонты» распались наменьшие подразделения, не во всех случаях сохранившие свою квалифи-кацию. На волне спроса (ввиду изношенности электрических сетей и дли-тельного отсутствия денег на строительство новых объектов) появлялись ибезымянные конторы, зачастую без производственного и тем более науч-ного потенциала, но с нереальными амбициями и теневым ресурсом на по-лучение работ любой сложности.
В последние годы внесены поправки к требованиям выполненияпроектирования. Сегодня в связи с 87-ым постановлением проектная дея-тельность с двустадийного, как и ранее: первая стадия – «Утверждаемаячасть», вторая часть – «Проект», перешла на новую систему, на первыйвзгляд без особых различий. При этом теперь требуется выполнять
5
сначала стадию «Проект», где в общих чертах принимаются основныеэлектротехнические решения, а только потом детализированный «Рабочийпроект», где все принятые решения прорабатываются более детально.
По обыкновению в период между «Проектом» и «Рабочей докумен-тацией» проводятся конкурсы по выбору производителей оборудования.Конкурсы из-за низкой технической квалификации набранных из эконо-мистов конкурсных комиссий затягиваются с двух месяцев до полугода иболее. Да и решения чаще всего принимаются не соответствующие планами мыслям проектировщиков. Учитывая требования заказчиков к срокамвыполнения работ, проектные организации, тем не менее, вынуждены про-должать работу в период проведения конкурсных процедур, тем самымобрекая себя на грядущие переделки.
Таким образом, у проектировщиков к основной работе прибавилосьработы на корректировки проектов, так как каждый из производителей имеетсвои конструктивные особенности, требующие внесения изменений в проект.Понятие типовых проектов, которые позволяли не останавливаться на мелкихдеталях и повышать качество работ, практически ушло в прошлое. Тем са-мым обрекая практически каждую самостоятельную проектную организациютакже самостоятельно наступать на одни и те же грабли.
К сожалению, итогом первых этапов реформы РАО «ЕЭС» можносчитать то, что основными ориентирами стали не «качество», как раньше,а «сроки и стоимость», что и привело к перечисленным выше последстви-ям. Важно понимать, что в сложившейся ситуации даже в руках опытныхпрофессионалов страдает стратегия развития. Особенно в период послед-ствий расформирования РАО «ЕЭС», которое хоть и формально, но осу-ществляло централизацию активов и контроль за предприятиями ЕдинойЭнергетической Системы.
Пока не поздно, необходимо ужесточить государственный контрольза деятельностью подразделений электроэнергетики, и не только в вопро-сах, конечно же, важнейших сделок по продаже и передаче сетевых объек-тов и вопросах сокращения персонала, которые имеют место быть, но и впроблемных вопросах сопутствующих организаций, таких как проектныеинституты. Именно государство должно в целях повышения качества раз-вития электроэнергетики объединить все сегменты отрасли. Важно
6
вернуться к научно-техническим советам, обмену опытом между разроз-ненными подразделениями энергосистемы.
Необходимо разработать комплексную программу взаимодействиямежду ведущими проектными институтами, строительными компаниями,производителями энергетического оборудования, которые вместо того,чтобы совершенствовать свое развитие, топчутся на месте, самостоятельноделая одни и те же шаги в одном и том же направлении, часто некритиче-ски заимствуя друг у друга те или иные решения и повторяя одни и те жеошибки. При этом взаимодействие перечисленных направлений должноотладить именно государство.
Необходимость возрождения серьезных научно-исследовательскихподразделений хотя бы в рамках головных проектных институтов не вы-зывает сомнений.
ЗАЩИТА ОТ КОРРОЗИИ КАБЕЛЬНЫХ ЛИНИЙ 6 – 10 – 35 - 110 КВ
Баринов В. М.Санкт-Петербургский государственный
политехнический университет
Первые кабельные линии (КЛ) были проложены в 1883 г., и сегодняв сети города работают сотни километров кабелей дореволюционных про-кладок, в том числе и кабели 20 кВ, которые были впервые проложены в1914 году. На начало 2011 года в Санкт-Петербурге эксплуатируются при-мерно 19,5 тысяч км КЛ 0,4-6-10-35-110 кВ.
Ежегодно по разным причинам повреждается некоторое количествоКЛ, в том числе и по причине коррозии металлических оболочек кабелей.Доля таких повреждений значительна. Так, в 2010 году в сети 6 кВ повре-дилось 11 % КЛ от общего числа повреждений (в 2009-м – 16 %), а в сетях10 кВ – 12 % (в 2009-м - 14 %). В сетях 35 кВ было 6 повреждений по при-чине коррозии свинцовых оболочек. В 2010 году было два случая корро-зии свинцовых оболочек КЛ 110 кВ от блуждающих токов. Так как этотвид повреждений имеет не локальный характер, а распространяется подлине КЛ на десятки, а иногда и на сотни метров, объёмы ремонтовдостаточно велики.

7
По видам коррозии мы различаем: почвенную, от блуждающих токов(часто они сопутствуют друг другу) и чисто химическую коррозию - феноль-ную. Фенольная коррозия встречается на кабелях, где защитные покровы приизготовлении обрабатывались продуктами каменноугольной смолы. Сейчасвстречается крайне редко, так как такая пропитка прекращена.
Наилучшим образом зарекомендовали себя в отношении устойчиво-сти к агрессивным грунтам и блуждающим токам кабели марок АСБ2л иАСБ2л Шв.
Анализ повреждаемости за 1985-2010 гг. выявил, что кабели с алю-миниевой оболочкой повреждаются более чем в 6,3 раза чаще, чем кабелисо свинцовой оболочкой. Коррозионные повреждения имеют примерно800 КЛ 6 – 10 - 35 кВ со свинцовой и алюминиевой оболочкой. Во всехчастях города насчитывается примерно 400 адресов, где отмечались слу-чаи коррозионных повреждений КЛ.
Для защиты от блуждающих токов КЛ 6 – 10 - 35 кВ подключаютсяв совместные катодные защиты, которые осуществляются теми организа-циями, чьи инженерные подземные сооружения (водопроводные сети, га-зовые сети, тепловые сети) пересекают КЛ или идут параллельно.
Включение в систему совместной защиты КЛ производится черезвентильные блоки, которые предотвращают перетекание токов из другихзащищаемых сооружений на оболочки КЛ. В настоящее время в эксплуа-тации находится 1120 блоков совместной защиты.
Для определения значений потенциала, возникающего на устройствекатодной защиты, в Ленэнерго в 1982 г. были произведены исследования,при которых ток короткого замыкания в одной из фаз кабельной линий220 кВ достигал 25 800 А, при этом проводились измерения на всех сопут-ствующих металлических сооружениях.
При проектировании катодной защиты надо применять катодныестанции, работающие в автоматическом режиме. Применение кабелей10 кВ и выше с изоляцией из сшитого полиэтилена не снимает вопросызащиты от коррозии. «Руководящие указания по электрохимической защи-те подземных энергетических сооружений от коррозий» требуют пере-смотра, и дополнения в части применения кабелей с изоляцией из сшитогополиэтилена.
8
ЛОКАЛИЗАЦИЯ МЕТОДА МОРФОЛОГИЧЕСКОГО СИНТЕЗАСТРУКТУРЫ СИСТЕМЫ УПРАВЛЕНИЯ
Белов В. С., Белов М. В.Псковский государственный университет
Основой данного метода является построение СТРУКТУРНОГО мОР-
ФОЛОГИЧЕСКОГО ПРОСТРАНСТВА [1] организации системы управления.Для этого положим, что в распоряжении проектировщика имеется:
1. Конечное множество SE , элементы которого будем называтьСТРУКТУРНЫМИ ЭЛЕМЕНТАМИ системы управления.
2. Разбиение 1,...,G 2
SS E: множества SE на МОРФОЛОГИЧЕСКИЕ
КЛАССЫ или ПОДМНОЖЕСТВА, где G – общее число классов, при этом g ,g 1,G S Sσ E есть совокупность структурных элементов, принадлежа-
щих g -му морфологическому подмножеству, причем g Sσ и разбиение Sσ удовлетворяет условию g g S Sσ σ при g g . Применительно к
условиям синтеза системы управления можно выделить следующие базо-вые структурные морфологические подмножества: S SM m – множество
исполнительных механизмов; S SH h – множество микроконтролле-
ров – локальных регуляторов; S SC c – множество технических средств
вычислительного назначения; S SW w – множество интерфейсов досту-
па к исполнительным механизмам; S SQ q – множество интерфейсов
межкомпьютерных коммуникаций; S ST – множество интерфейсных
модулей сопряжения; S SP p – множество программных средств под-
держки управления. Тогда: , , , , , ,S S S S S S S SE M H C W Q T P или S S S S S S S SE M H C W Q T P . (1)
Введем понятие:Определение 1. СТРУКТУРНЫМ МОРФОЛОГИЧЕСКИМ ПРОСТРАНСТ-
ВОМ SΛ называется множество 2
SS EΛ , причем такое, что для всех

9
S Skλ Λ (всех ВАРИАНТОВ СТРУКТУРЫ СИСТЕМЫ УПРАВЛЕНИЯ) и для
любого индекса g 1,...,G множество gS Skλ σ одноэлементное.
Следовательно, вариант структуры системы управления S Skλ Λ яв-
ляется вариантом морфологической системы тогда и только тогда, когда Skλ есть множество представителей структурных классов (подмножеств).
, , , , , , , , , , , , S S S S S S S S S S S S S S Sk k k k k k k kλ m h c w q τ p m h c w q τ p (2.1)
при этом чаще имеет место пересечение базовых подмножеств S S S S S S S Sk k k k k k k kλ m h c w q τ p . (2.2)
Таким образом, под структурным морфологическим пространствомпонимается непустое множество SΛ дискретных точек S
kλ , каждая из ко-торых есть определенная комбинация способов программно–технически–коммуникационной реализации платформы системы управления.
В практике синтеза структуры системы управления часто встречают-ся ситуации, когда еще до начала ее синтеза исключаются из рассмотрениязаведомо нереализуемые варианты. В морфологическом пространстве SΛтаким вариантам соответствуют запрещенные точки, исключаемые издальнейшего анализа. Для задания множества таких точек используютсяМАТРИЦЫ БИНАРНЫХ ОТНОШЕНИЙ (СОВМЕСТИМОСТИ) S
kβ между базовы-ми структурными ресурсами, образуемые совокупностью индикаторов со-
вместимости ; i j; i, j 1,G Sk.ijβ координат вектора S
kλ , т. е. GS S
k k.ij 1β β . Здесь
каждой разнотипной паре координат вектора Skλ ставится в соответствие
индикатор их совместимости Sk.ijβ , равный:
(3)
Тогда при формировании варианта структуры системы управления Skλ вместо выражения (2-2) следует использовать соотношение
S S S S S S S S S
k k k k k k k k kλ β m h c w q τ p , (4)
10
где символом обозначена операция умножения, а матрица совместимо-
сти Skβ представляет собой треугольную матрицу следующего вида:
0 0 0
0 0
0
IS k.12
k
I Ik.17 k.67
. . .
β . . .β
. . . . . . . . . . . .
β . . . β
, (5)
элементы которой определяются по (3).Изложенное позволяет реализовать ЛОКАЛЬНЫЙ ПОДХОД к решению
задачи формирования структуры системы управления, когда исследова-нию подлежат только те варианты, которые находятся в некоторой морфо-логически упорядоченной окрестности заданной базовой точки (гипотети-ческого прообраза) структурной схемы управляющей системы.
Формализуем этот подход, по ходу поясняя некоторые базовые по-нятия, используя материалы, изложенные в [2]. Итак:
Определение 2. БАЗОВАЯ ТОЧКА (ПРООБРАЗ) СТРУКТУРЫ
УПРАВЛЯЮЩЕЙ СИСТЕМЫ – это некоторый уже существующий или гипо-тетический вариант структуры системы управления (обозначим его через S0 ), который обоснованно (т. е. в некотором смысле оптимально) соот-
ветствует техническим требованиям проектируемого объекта, при этом со-стояния базовых векторов , , , , , p,S S S S S S S
0 0 0 0 0 0 0m h c w q , образующих прооб-
раз S0 , удовлетворяют условию НОРМАТИВНОЙ МИНИМАЛЬНОСТИ:
, , , , , , p p S S S S S S S S S S S S S S0 min 0 min 0 min 0 min 0 min 0 min 0 minm m h h c c w w q q , (6)
где , , , , , , pS S S S S S Smin min min min min min minm h c w q являются минимальными значениями ба-
зовых системных ресурсов, отвечающих условиям необходимости и дос-таточности для организации среды управления, при этом:
pS S S S S S S Smin min min min min min min minm h c w q . (7)
Определение 3. МОРФОЛОГИЧЕСКИ УПОРЯДОЧЕННАЯ ОКРЕСТНОСТЬ
ПРООБРАЗА СТРУКТУРЫ – это подмножество S S0Λ Λ , содержащее вариан-
ты Sk структуры системы управления морфологически близкие к базовой

11
точке S0 , которые ЛЕКСИКОГРАФИЧЕСКИ УПОРЯДОЧЕНЫ в пределах не-
которого ограниченного числа N S0 предпочтительных вариантов.
Определение 4. ЛЕКСИКОГРАФИЧЕСКИ УПОРЯДОЧЕННЫМИ
ВАРИАНТАМИ СТРУКТУРЫ вблизи базовой точки S0 называется упорядо-
ченное подмножество S S0Λ Λ , каждой точке S S
k 0Λ которого соответ-
ствует точка S S nk kψ ψ R , где nR – пространство векторных оценок ка-
чества вариантов ψ ,ψ ,...,ψ TS S S S
k k.1 k.2 k.Vψ ( T – символ транспонирования),
упорядоченных ЛЕКСИКОГРАФИЧЕСКИМ ОТНОШЕНИЕМ ПРЕДПОЧТЕНИЯ.Определение 5. ЛЕКСИКОГРАФИЧЕСКИМ ОТНОШЕНИЕМ
ПРЕДПОЧТЕНИЯ называется условный критерий ψ упорядочения показа-
телей ψ ,ψ ,...,ψS S S1 2 L , позволяющий, при условии установления отношений
предпочтения между показателями, задать строгий линейный порядок ψ ,ψ ,...,ψ S S S1 2 L их использования, который определяет последовательность
процедур выбора варианта Sk по ψ ,r 1,L S
k.r в пространстве SΛ .
Определение 6. Вариант Sk ЛЕКСИКОГРАФИЧЕСКИ
ПРЕДПОЧТИТЕЛЬНЕЕ варианта Sj , т. е. ; k j
lexS S S S S
k j k j 0Λ , если вер-
но одно из условий:
ψ ψ
ψ ψ ,ψ ψ
ψ ψ , r 1, L 1 ,ψ ψ
S S1 k 1 j
S S S S1 k 1 j 2 k 2 j
S S S Sr k r j L k L j
. . . . . . . . . . . . . . . . . . . . . . . .
. (8)
Использование (7) позволяет из пространства SΛ выбрать множест-во S
0Λ лучших альтернатив Sk , при этом решение данной задачи может
быть представлено в виде «вложения» множества линейных порядков ψ ,r 1,L S S Sz 0 k.rΛ Λ альтернатив по показателям качества ψ ,ψ ,...,ψ S S S
1 2 L .
Известно, что:

12
Определение 7. ЛИНЕЙНЫМ ПОРЯДКОМ , ψS S Sz 0 r k.rΛ Λ АЛЬТЕРНАТИВ
, , k 1, N S S S
0 r k.r 0Λ по ψ Sr называется упорядоченное множество вида:
, ψ , ,..., , , ,..., 0
S S S S S S S S Sz 0 r r 1.r 2.r k.r N .rk-1 .r k+1 .rΛ Λ , (9)
для которого
, ... , , ...
0
S S S S S S1.r 2.r k.r N .rk-1 .r k +1 .r , поскольку имеет ме-
сто
ψ ψ ... ψ ψ ψ ... ψ
0
S S S S S S S S S S S Sr 1.r r 2.r r r k.r r r N .rk-1 .r k+1 .r .
Осуществив упорядочение на , ψS S Sz 0 r k.rΛ Λ по критерию ψ S
1 и полу-
чив подмножества вида ,S S1.1 2.1 ,
, ,S S S
k.1k-1 .1 k+1 .1 , можно провести уста-
новление линейного порядка среди элементов этих подмножеств по ψ S2 , а
на подмножествах с одинаковыми значениями по ψ S2 – установление ли-
нейного порядка по ψ S3 и т. д. в соответствии с приоритетами в последо-
вательности критериев ψ ,ψ ,...,ψ S S S1 2 L .
Определение 8. Вариант Sk ЭКВИВАЛЕНТЕН S
j , т. е. S S
k j~ , когда
по каждому критерию ψ , r 1,LSr
Sk и S
j имеют одинаковые оценки:
ψ ψS S S Sr k r j . (10)
Отношения (9) и (10) справедливы, если степень значимости (важно-сти) r любого из критериев ψ S
r одинакова. При неодинаковости весов r
показателей ψ ,ψ ,...,ψS S S1 2 L используется взвешенное упорядочение сопос-
тавляемых вариантов при условии нормировки весов r :
11, 0
L
r rr
, (11)
при этом процедура сравнения двух вариантов выполняется в два шага.Шаг 1. Первоначально все показатели качества ψ ,ψ ,...,ψS S S
1 2 L приво-дятся к безразмерной нормализованной форме, когда лучшему значениюкачества соответствует величина 1.
Шаг 2. На этом шаге, используя метод «скаляризации» (линейнойсвертки), значение единого показателя многокритериальной оптимизацииструктуры системы управления определим по формуле:
13
J max
0
LS S
k r k.r k 1,Nr 1. (12)
Если при определении численных значений единого критерия J Sk на-
ходятся несколько вариантов структур Sk ( k 1,N S
0 ) с одинаковыми зна-
чениями J Sk (или несколько подгрупп S
k с одинаковыми J Sk ), то в этом
случае упорядочение альтернативных вариантов в каждой такой подгруп-пе производится в соответствии с правилом (8)-(9) лексикографическихпредпочтений при условии установления строгого линейного порядка ψ ,ψ ,...,ψ S S S1 2 L использования частных критериев качества ψ ,ψ ,...,ψS S S
1 2 L .
Литература:
1. Zwicky F. Morphological astronomy. – Berlin, 1953. – 229 p.2. Визильтер Ю. В., Желтов С. Ю. Сравнение и локализация фраг-
ментов изображений с использованием проективных морфологий. // Вест-ник компьютерных и информационных технологий. 2008, № 2. - С. 14-22.
ОПРЕДЕЛЕНИЕ АНАЛИТИЧЕСКИХ ЗАВИСИМОСТЕЙДЛЯ АКТИВНЫХ МОЩНОСТЕЙ
ПРИ ИЗМЕНЕНИИ ПАРАМЕТРА СХЕМЫ
Беляев Н. А., Коровкин Н. В., Чудный В. С.Санкт-Петербургский государственный
политехнический университетФролов О. В.
ОАО «Научно-исследовательский институт по передачеэлектроэнергии постоянным током высокого напряжения»
Распределение активных мощностей по ветвям энергосистемы мо-жет быть получено на основе решения следующей системы линейныхуравнений:
P B , (1)
где B – матрица узловых проводимостей, и P – векторы фазовых угловнапряжений и активных мощностей соответственно.
14
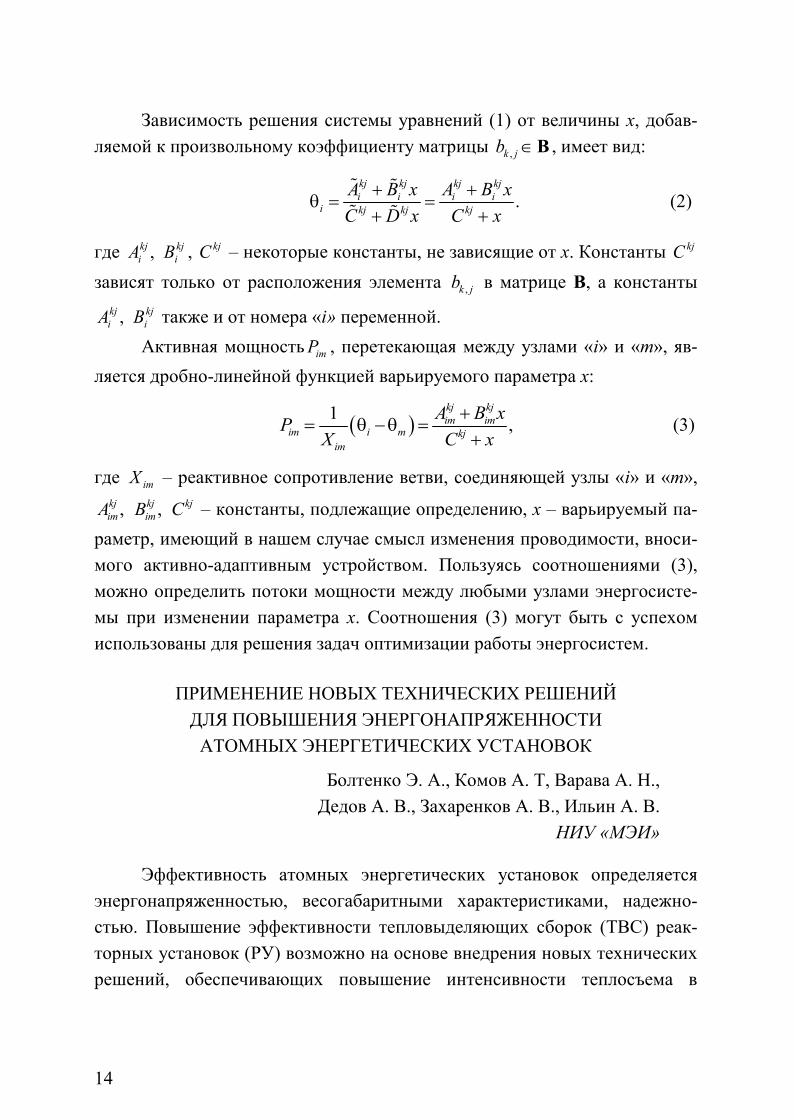
Зависимость решения системы уравнений (1) от величины x, добав-ляемой к произвольному коэффициенту матрицы ,k jb B , имеет вид:
.kj kj kj kji i i i
i kj kj kj
A B x A B xC D x C x
(2)
где ,kj kji iA B , kjC – некоторые константы, не зависящие от x. Константы kjC
зависят только от расположения элемента ,k jb в матрице В, а константы
,kj kji iA B также и от номера «i» переменной.
Активная мощность imP , перетекающая между узлами «i» и «m», яв-ляется дробно-линейной функцией варьируемого параметра x:
1 ,kj kjim im
im i m kjim
A B xPX C x
(3)
где imX – реактивное сопротивление ветви, соединяющей узлы «i» и «m»,
, ,kj kj kjim imA B C – константы, подлежащие определению, x – варьируемый па-
раметр, имеющий в нашем случае смысл изменения проводимости, вноси-мого активно-адаптивным устройством. Пользуясь соотношениями (3),можно определить потоки мощности между любыми узлами энергосисте-мы при изменении параметра x. Соотношения (3) могут быть с успехомиспользованы для решения задач оптимизации работы энергосистем.
ПРИМЕНЕНИЕ НОВЫХ ТЕХНИЧЕСКИХ РЕШЕНИЙДЛЯ ПОВЫШЕНИЯ ЭНЕРГОНАПРЯЖЕННОСТИ
АТОМНЫХ ЭНЕРГЕТИЧЕСКИХ УСТАНОВОК
Болтенко Э. А., Комов А. Т, Варава А. Н.,Дедов А. В., Захаренков А. В., Ильин А. В.
НИУ «МЭИ»
Эффективность атомных энергетических установок определяетсяэнергонапряженностью, весогабаритными характеристиками, надежно-стью. Повышение эффективности тепловыделяющих сборок (ТВС) реак-торных установок (РУ) возможно на основе внедрения новых техническихрешений, обеспечивающих повышение интенсивности теплосъема в

15
конвективной области, повышения запасов до кризиса теплоотдачи. Эф-фективность ТВС РУ возможно улучшить также за счет использованияальтернативных схем теплосъема.
Устранение гидравлических неравномерностей по сечению ТВС
В ТВС имеет место значительная неравномерность распределенияподогревов теплоносителя по сечению. Для устранения тепловой неодно-родности в ТВС, как правило, используют различные методы конструк-тивные элементы, предназначенные как для внутрикассетного, так и длямежкассетного перемешивания теплоносителя в пределах активной зоны.В ТВС перемешивание теплоносителя осуществляется, как правило, с по-мощью дистанционирующих решеток (ДР), снабженных различными эле-ментами для перемешивания и турбулизации потока. Известно большоеколичество технических решений, направленных на улучшение переме-шивания теплоносителя между ячейками, перемешивание по кассете итурбулизацию потока в отдельных ячейках. Для получения эффективноговоздействия на поток, приводящего к значительному повышению КТП,необходимо чтобы конструкция дистанционирующей решетки позволяла,как улучшить перемешивание по сечению пучка, так и увеличить турбули-зацию потока в отдельных ячейках. Внесение, каких либо конструктивныхэлементов требует экспериментальной проверки в условиях сборки сбольшим числом стержней. Расчетные методики, позволяющие оценитьэффект от воздействия ДР на запасы до кризиса теплоотдачи отсутствуют.
Интенсификация теплосъема с теплоотдающих поверхностей твэл
Для интенсификации теплосъема в однофазной области используют-ся различные интенсификаторы: турбулизаторы потока на поверхности,шероховатые поверхности, оребреные поверхности, закрутка потока спи-ральными ребрами, шнековыми устройствами, завихрителями, установ-ленными на входе в канал. Интенсификация теплосъема достигается засчет генерации вихревых структур, однако при этом происходит диссипа-ция энергии на этих структурах. Как правило, рост потерь энергии превы-шает рост коэффициента теплоотдачи. Для повышения интенсивности те-плосъема в конвективной области на выпуклой теплоотдающей поверхно-сти возможно использование взаимодействующих закрученных потоков.
16
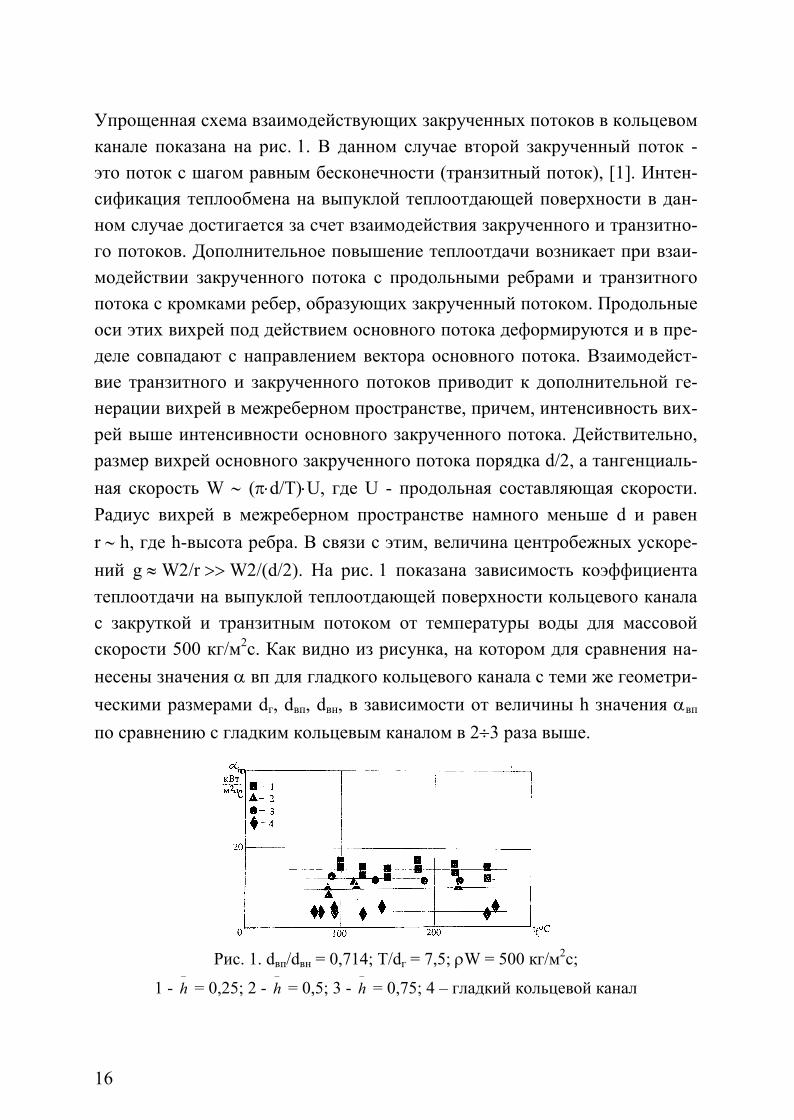
Упрощенная схема взаимодействующих закрученных потоков в кольцевомканале показана на рис. 1. В данном случае второй закрученный поток -это поток с шагом равным бесконечности (транзитный поток), [1]. Интен-сификация теплообмена на выпуклой теплоотдающей поверхности в дан-ном случае достигается за счет взаимодействия закрученного и транзитно-го потоков. Дополнительное повышение теплоотдачи возникает при взаи-модействии закрученного потока с продольными ребрами и транзитногопотока с кромками ребер, образующих закрученный потоком. Продольныеоси этих вихрей под действием основного потока деформируются и в пре-деле совпадают с направлением вектора основного потока. Взаимодейст-вие транзитного и закрученного потоков приводит к дополнительной ге-нерации вихрей в межреберном пространстве, причем, интенсивность вих-рей выше интенсивности основного закрученного потока. Действительно,размер вихрей основного закрученного потока порядка d/2, а тангенциаль-ная скорость W (d/T)U, где U - продольная составляющая скорости.Радиус вихрей в межреберном пространстве намного меньше d и равенr h, где h-высота ребра. В связи с этим, величина центробежных ускоре-ний g W2/r W2/(d/2). На рис. 1 показана зависимость коэффициентатеплоотдачи на выпуклой теплоотдающей поверхности кольцевого каналас закруткой и транзитным потоком от температуры воды для массовойскорости 500 кг/м2с. Как видно из рисунка, на котором для сравнения на-несены значения вп для гладкого кольцевого канала с теми же геометри-ческими размерами dг, dвп, dвн, в зависимости от величины h значения вп
по сравнению с гладким кольцевым каналом в 23 раза выше.
Рис. 1. dвп/dвн = 0,714; Т/dг = 7,5; W = 500 кг/м2с;
1 - h
= 0,25; 2 - h
= 0,5; 3 - h
= 0,75; 4 – гладкий кольцевой канал

17
В сборках процессы образования вихревых структур при взаимодей-ствии закрученных и транзитных потоков, движущихся вдоль выпуклыхтеплоотдающих поверхностей усложняются, но в целом следует ожидать,что эффект от взаимодействия закрученного и транзитного потоков будетаналогичен. На рис. 2 показан один из возможных вариантов выполнениясборки, в которой реализуется взаимодействие закрученного и транзитно-го потоков. С этой целью закручивающие устройства установлены по от-ношению к теплоотдающим поверхностям твэл с зазором, зазоры образо-ваны путем установки фиксирующих элементов на поверхности твэл илипутем закрепления фиксирующих элементов к закручивающим устройст-вам со стороны твэл [4].
Рис. 2. Тепловыделяющая сборка1 - продольные ребра, 2 - закручивающее устройство,
3 - тепловыделяющий элемент, 4 - дистанционирующая решетка
Таким образом, использование взаимодействующих закрученныхпотоков позволяет повысить интенсивность теплосъема и КТП на выпук-лой теплоотдающей поверхности твэл. При оптимальном соотношении за-крученных потоков возможно получить увеличение теплоотдачи не сопро-вождающееся опережающим ростом потерь на трение.
Альтернативные схемы теплосъема
Рассмотрим альтернативную схему теплосъема. В РУ с альтернатив-ной схемой теплосъем в твэлах осуществляется как с наружной поверхно-сти твэл (традиционное исполнение), так и с внутренней теплоотдающейповерхности, рис. 3. В этом случае твэлы выполняются полыми, в частно-сти, трубчатыми 4. Предлагаемая схема теплосъема обладает преимуще-ствами, имеющими место в ТВС со стержневыми твэлами – на основе

18
Рис. 3. Трубчатый тепловыделяющий элемент c двухсторонним теплосъемом.1 - наружная оболочка твэл; 2 - топливо; 3 - внутренняя оболочка твэл:
4 - внутритвэльное пространство, ВП; 5 - межтвэльное пространство, МП;6 - отверстия, обеспечивающие гидравлическую обратную связь;
t вп - температура выпуклой поверхности твэл;t вн – температура вогнутой поверхности твэл;
t м – максимальная температура твэл;r м – расстояние (радиус) от центра твэл
до поверхности твэл с максимальной температурой
таких твэлов можно выполнить ТВС любой мощности. Вместе с тем, этасхема теплосъема обладает преимуществами, имеющими место в ТВС сконцентрическими кольцевыми зазорами – обеспечивается обратная теп-ловая связь между вогнутой и выпуклой теплоотдающими поверхностямитвэла. В ТВС с трубчатыми твэлами 4 повышение энергонапряженностии снижение максимальной температуры топлива достигается за счет:
1. Увеличения поверхности теплосъема – теплосъем осуществляетсякак с наружной (выпуклой), так и с внутренней (вогнутой) теплоотдающихповерхностей.
2. Образования тепловых обратных связей между выпуклой и вогну-той теплоотдающими поверхностями. Любое ухудшение теплосъема наодной из поверхностей приведет к перераспределению тепловых потоков,смещению максимума теплового потока к одной из поверхностей, улуч-шению тепловой обстановки на поверхности, где ухудшились условия те-плосъема.

19
3. Образования гидравлических обратных связей. Гидравлическая об-ратная связь (в случае необходимости) реализуется путем перетоков теплоно-сителя через отверстия из внутренних полостей твэлов в межтвэльное про-странство (или наоборот). Этим самым теплоноситель перемешивается по се-чению ТВС, улучшая теплосъем с теплоотдающих поверхностей.
На рис. 3 показан трубчатый твэл с двухсторонним теплосъемом,реализующий как обратные тепловые, так и гидравлические связи.
В настоящее время на стенде ТВС МЭИ (см. доклад на данной кон-ференции) ведутся работы по обоснованию новых технических решений,направленных на повышение эффективности атомных энергетических ус-тановок.
Литература:
1. Патент России 1540426 МКИ3F28F13/12. Теплопередающее уст-ройство / Э. А. Болтенко // Заявка № 4423162/24-06 от 07.05.88. Открытия.Изобретения. 1992. № 31.
2. Болтенко Э. А. Кризис теплообмена в кольцевых каналах с закрут-кой потока // Теплоэнергетика, 2003, № 11.с. 25-30.
3. Патент России 2295785 МПК3G 21С 3/34, F28 F 13/12. Тепловы-деляющая сборка /Э. А. Болтенко // Заявка № 2005108295 от 24.03.2005.Бюл. № 8. 2007 г.
4. Блинков В. Н., Болтенко Э. А., Елкин И. В, Мелихов О. И., Со-ловьев С. Л. Перспективы использования кольцевых твэлов в атомнойэнергетике // Теплоэнергетика. 2010, .№ 3. С.28-33.
КОМБИНИРОВАННАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКАНА ВОЗОБНОВЛЯЕМЫХ ИСТОЧНИКАХ ЭНЕРГИИ
Былеев А. С.Псковский государственный университет
Известно, что энергоустановки, использующие возобновляемые ис-точники энергии требуют доработки и имеют недостатки (непостоянствоработы из-за переменчивости погоды, конструктивное несовершенство).Компенсировать этот недостаток можно путем применения комбиниро-ванных установок. Гибридная энергоустановка позволит обеспечить
20
электроэнергией удаленный социальный или сельскохозяйственный объ-ект. Сочетание использования энергии солнца и ветра позволит в течениекалендарного года обеспечивать потребителей электроэнергией. КлиматСеверо-Западного региона таков, что с апреля по сентябрь преобладаетсолнечная энергия, а в оставшийся период интенсивно возрастает действиеветров. В случае отсутствия природных факторов, необходимых для рабо-ты энергоустановки, использующей энергию ветра и солнца, необходимобудет воспользоваться аккумуляторами энергии или резервным источни-ком (дизельным или бензиновым генератором).
Комбинированная установка состоит из ветроэнергетической уста-новки УВЭ 500 (рис. 1) и солнечных модулей (солнечные батареи)MSW – 65/40 DS (рис. 2).
Рис. 1. Установка ветроэлектрическая УВЭ 500
Рис. 2. Солнечные модули MSW – 65/40 DS
21
Установка установлена на крыше одного из корпусов Псковского го-сударственного университета, подключена через штатный блок управле-ния к активной нагрузке (ТЭН) сопротивлением 1,92 Ом (номинальнаямощность 300 Вт) и аккумуляторам. С помощью заглушек можно отклю-чить солнечный модуль или ветроэнергетическую установку, что позволя-ет производить замеры по отдельности для каждой установки. Излишкинагрузки могут преобразовываться в тепло с помощью подключаемогоблока ТЭН. Аккумуляторы позволяют накапливать энергию и расходоватьее по мере необходимости при отсутствии или при недостаточной энергиисолнца и ветра (пасмурная или облачная погода, небольшие скорости вет-ра). Блок управления имеет выходные характеристики в виде постоянноготока напряжением 12 В и 24 В или совместно с преобразователем напря-жения 24/220 В 50 Гц для питания бытовых нагрузок.
Расположение ветроэнергетической установки на крыше строенияпозволяет повысить КПК и эффективность работы, снижает безопасностьи шумовой эффект. Основные характеристики ветроэнергетической уста-новки: максимальная мощность – 500 Вт, выходное напряжение генерато-ра при номинальной нагрузке – 24…30 В, рабочий диапазон ветров -3…25 м/с, высота мачты 4,5 метра, диаметр ветроколеса 2,2 метра.
Двусторонние солнечные модули преобразовывают энергию света,как с лицевой, так и с тыльной стороны. Это позволяет тыльной сторонеиспользовать энергию отраженного света. Тыльная сторона модуля полу-чает энергию, отраженную от поверхности воды или земли (например, отсветлого песка или снега). Основные характеристики солнечных модулей:максимальная мощность лицевой стороны – 65 Вт и тыльной – 40 Вт, но-минальное напряжение – 12 В, габаритные размеры – 1080 х 550 х 38 мм.
За счет использования модулей с двухсторонней чувствительностьюможно получить примерно на 15-20 % больше энергии с заданной площа-ди модуля. Это ведет к меньшей материалоемкости фотоэлектрической ба-тареи и к меньшей стоимости системы в целом.
Однако более важным преимуществом таких модулей является прак-тическая прозрачность для инфракрасного излучения. Вследствие этого,двусторонние модули меньше нагреваются в реальных условиях и, следо-вательно, имеют меньшие тепловые потери по сравнению с

22
односторонними модулями. Поэтому, в отличие от модулей других произ-водителей, двусторонние модули в реальных условиях выдают большуюмощность за счет меньшего нагрева (обычно в летнее время их температу-ра не превышает 40-50 градусов против 50-60 градусов Цельсия у обыч-ных модулей).
Для преобразования и накопления электроэнергии поступающей отустановки ветроэлектрической и солнечных модулей их подключают кблоку управления. Схема подключения показана на рис. 3.
Нагрузка
ТЭН
Солн. бат.
Генератор
Аккумулятор
Блокуправления
Ветроагрегат Генератор
Заглушка
Кабель
Жгут
к аккумулятору
Блок ТЭН
К нагрузке
- +
Заглушка
Солн. бат.
+-
Масса МасштабИзм. Лист №докум. Подп. Дата
Лит.
Разраб.Пров.Т.контр. Лист Листов
Н.контр.Утв.
1:11
Инв.№подл.Подп.идата
Взам.инв.№Инв.№дубл.Подп.идата
Справ.№
Перв.примен.
Копировал Формат A2
Рис.3. Схема подключения составных частей установки
К разъему генератор подключается ветроагрегат УВЭ 500;К разъему аккумулятор подключается два аккумулятора напряжени-
ем по 12 В.;К разъему солнечная батарея подключается 4 солнечного модуля
MSW – 65/40 DS;К разъему ТЭН подключается активная нагрузка ТЭН сопротивлени-
ем 1,92 Ом (номинальная мощность 300 Вт);К разъему нагрузка подключается социальный или сельскохозяйст-
венный объект (теплица, дачный домик и т. п.).Могут быть предусмотрены три режима работы комбинированной
установки:- буферный - с аккумуляторной батареей напряжением 24 В для пи-
тания электроприборов постоянного тока;
23
- автономный - прямое подключение к нагрузке, не требующейстабилизации напряжения;
- совместно с преобразователем напряжения (инвертором) - питаниебытовых приборов.
Анализ данных показал, что комбинированная энергетическая уста-новка на возобновляемых источниках энергии (солнце, ветер) может вдолжной мере обеспечить социального или сельскохозяйственного потре-бителя электроэнергией в течение календарного года. В качестве резерв-ного источника рекомендуется использовать бензиновый источник не-большой мощности (1-3 кВт). Он позволит в случае пасмурной погоды ипри отсутствии ветра (на протяжении длительного времени), обеспечитьэнергией потребителя. Другими достоинствами комбинированных устано-вок являются: повышение надежности энергообеспечения удаленных объ-ектов, сокращение потребления органического топлива, уменьшаются за-траты на транспортировку топлива, экологическая чистота.
Литература:
1. Саплин Л. А., Шерьязов С. К., Пташкина-Гирина О. С.,Ильин Ю. П. Энергоснабжение сельскохозяйственных потребителей с ис-пользованием возобновляемых источников / Челябинск, 2000.
2. Шевельков В. В., Былеев А. С. Труды псковского политехническогоинститута № 14.3 / Статья. Анализ климатических условий Псковской облас-ти для возможности использования НВИЭ / Псков: изд-во ППИ, 2011.
СИСТЕМЫ ТЕМПЕРАТУРНОГО МОНИТОРИНГАЭЛЕКТРИЧЕСКИХ КАБЕЛЕЙ.
ПОКАЗАТЕЛИ ЭНЕРГОЭФФЕКТИВНОСТИ
Валов П. Г.Санкт-Петербургский государственный
политехнический университет
В настоящий момент в России активно реализуются задачи, постав-ленные перед электроэнергетикой федеральным законом № 261 от23.11.09 «Об энергосбережении и о повышении энергетической эффектив-ности». В связи с этим появилась потребность по внедрению гибких
24
систем передачи электроэнергии, а также по совершенствованию комплек-сов автоматической аварийной защиты и диспетчерского управления. На-личие мощной системы автоматизированного управления энергосистема-ми на региональном уровне и уровне предприятий позволит стать базойдля дистанционного управления энергетикой, которая послужит основойдля создания «умных» сетей в России.
В мировой практики широкое применение получили Smart Grid, от-дельное направление преобразования электроэнергетики. С использовани-ем этой системы предполагается объединить электрические сети, потреби-телей и производителей электроэнергии в единую автоматизированнуюсистему, которая будет иметь свойства самодиагностирования и самовос-становления. Такая система будет способная самостоятельно выявлятьнаиболее уязвимые зоны работы сети и устранять их. Системы Smart Gridв настоящее время получают все больше внимания и в России.
Основное проблемой надежного электроснабжения в нашей странеявляется износ действующего энергетического оборудования. В этой свя-зи, для эффективной передачи и распределения электрической энергии,необходимы надежные и современные кабельные линии.
Один из способов обеспечения надежной работы кабельной системыэто мониторинг температуры фаз кабеля по всей его длине. Необходимостьприменения систем мониторинга распределенной температуры кабельнойлинии, подтверждается опытом разных стран и требованиям к эксплуатациикабельных линий в современных реалиях электроэнергетики.
Такая система помогает эксплуатационным организациям в решениицелого ряда задач:
- снижение количества перебоев в электроснабжении и системныхаварий;
- оперативное реагирование на перегрузки;- выявление скрытых резервов существующих мощностей;- прогнозирование срока эксплуатации.Стоит заметить, что температура жил кабеля зависит от множества
факторов, например, от условий прокладки, поэтому ключевым элементомсовременных систем распределенного изменения температуры кабеля яв-ляется оптическое волокно.
25
Сбор и анализ данных по температуре по длине кабельной линии да-ет картину процессов, происходящих в линии, что позволяет более рацио-нально использовать кабельные сети в различных режимах работы.
Температурный мониторинг кабельных сетей с использованием во-локонно-оптических датчиков, позволяет сделать сеть «умной», способнойдиагностировать различные параметры, влияющие на надежность работывсей системы. Системы температурного мониторинга в настоящее времяявляются одной из важных составляющих вышеупомянутых систем SmartGrid, их развитие и повсеместное применение позволяет более эффективноуправлять энергосистемой.
Таким образом, можно сделать вывод, что изучение и совершенство-вание систем температурного мониторинга кабельных линий являетсяважной задачей для достижения высоких целей, поставленных перед энер-гетическим комплексом России.
Литература:
1. Кобец Б. Б., Волкова И. О. Инновационное развитие электроэнер-гетики на базе концепции Smart Grid. –М.:ИАЦ Энергия, 2010. – 208 с.
2. Якунин А. В. Температурный мониторинг. КАБЕЛЬ-news, 2010.3. Smart Power Grids – Talking About Revolution. IEEE Emerging
Technology Portal, 2009.
СИСТЕМА АВТОМАТИЗИРОВАННОГОПРОЕКТИРОВАНИЯ ЦИФРОВЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Вертешев С. М., Коневцов В. А., Максягина И. А.,Полетаев И. А., Тимошевская О. Ю.
Псковский государственный университет
При проектировании сложных цифровых САУ возникают проблемыстыковки частей цифровой САУ, реализованных на многих языках [2].Использование многих языков в проектировании снижает производитель-ность труда в области автоматизации технологических процессов, надеж-ность и безопасность проектируемых цифровых САУ.

26
В этой работе [1] ставится задача создания на современных микро-процессорных средствах системы автоматизированного проектированияцифровых систем автоматического управления (САПР цифровых САУ),комплекса программных средств проектирования систем цифровогоуправления (ПСПСЦУ) на основе концепции применения единственногоязыка – языка блочного проектирования схем.
Даны грамматические определения составных частей языка, включаяалфавит, виды и форматы сигналов, адресацию, синтаксис и семантикуязыка блочного проектирования и символьного описания схем. На основеанализа математических методов теории автоматического управления и еепрактических приложений определен состав терминальных выражений (ос-новного состава функциональных модулей) языка блочного проектированиясхем цифровых САУ. Представлена архитектура программной среды проек-тирования и отладки цифровых САУ на основе комплекса ПСПСЦУ.
Создание САПР цифровых САУ с языком блочного проектированиясхем цифровых САУ технологическими процессами позволит:
- разрабатывать любые цифровые САУ, не привлекая дополнитель-ные языковые средства типа SFC, IL, ST, FBD, LD, CFC,FCL (IEC 61131-3:2003, IEC 61131-7:2000, IEC 61499-1:2005) с различаю-щимися грамматиками [3, 4];
- значительно повысить производительность труда разработчиковцифровой САУ и ее эксплуатационного персонала;
- существенно снизить затраты на поддержание собственного жиз-ненного цикла комплекса ПСПСЦУ;
- повысить уровни технологической безопасности автоматизируе-мых производств;
- решать комплексы связанных между собой задач автоматическогоуправления различного характера в составе одной и той же цифровой САУс использованием одного и того же языкового средства;
- расширить круг пользователей, способных ставить, решать и сда-вать «под ключ» свои задачи в АСУ ТП.
Концепция разработки комплекса ПСПСЦУ основана на:- создании языка, учитывающего в своей грамматике терминологию
теории и практики управления, терминологию специалистов по

27
автоматизации технологических процессов, традиционную форму нагляд-ного (блочного) представления схем систем управления;
- определении состава стандартных функциональных модулей на ос-нове анализа математических методов различных разделов теории автома-тического управления;
- отказе, при использовании функциональных модулей в синтезецифровых САУ, от использования меток, операций условных и безуслов-ных переходов, ветвления, выбора, цикла, составных операторов и макро-сов, которые применяются в классических языках программирования всехуровней и во всех средах программирования по стандартуIEC 61131-3:2003;
- технике подключения функциональных модулей друг к другу присинтезе цифровых САУ подобно тому, как это осуществляется в конст-руировании изделий схемотехники;
- отказа от использования косвенных вызовов подпрограмм функцио-нальных модулей и операций, рекурсии, перегрузки, наследования, входов поумолчанию, процесса компиляции при проектировании цифровых САУ.
Комплекс ПСПСЦУ можно использовать для решения в составе про-ектируемой системы управления задач:
- ввода и вывода аналоговых, дискретных и числоимпульсных сиг-налов в централизованных системах управления;
- преобразования сигналов после ввода и перед выводом;- непосредственного цифрового управления;- одно- и многоканального регулирования;- каскадного и многосвязного управления;- нелинейных преобразований сигналов;- нечеткого управления;- реализации схем логического управления с использованием уст-
ройств дискретной автоматики;- идентификации динамики управляемых каналов;- синтеза цифровых регуляторов;- адаптивного и оптимального управления;- индикации, коммутации, размножения, согласования сигналов…
28
Таким образом, специалист по автоматизации при использованиикомплекса ПСПСЦУ будет иметь возможность решать свои задачи от по-становки до внедрения и сдачи в промышленную эксплуатацию без уча-стия квалифицированного программиста. Декларирование и присвоениеначальных значений сигналов входов и выходов блоков функциональныхмодулей схем цифровых САУ будет осуществляться заданием адресовэтих сигналов в клеммниках соответствующих типов и видов в форме,принятой в практике монтажа средств КИПиА на разъемах в шкафах и на-весных каркасах.
Литература:
1. Коневцов В. А. САПР цифровых САУ. Концепция: Монография.Псков: Издательство ППИ, 2011. – 256 с.
2. Петров И. В. Программируемые контроллеры. Стандартные языкии приемы прикладного проектирования / Под ред. проф. В. П. Дьяконова.– М.: СОЛОН-ПРЕСС, 2008. – 256 с.
3. Wellenreuther G., Zastrow D. Automatisierung mit SPS- Theorie undPraxis.- Vieweg + Teubner Verlag, 5. Auflage, 2011, S. 870.
4. John K. H., Tiegelkamp M. SPS-Programmierung mit IEC 61131-3. –Springer Verag, 3. Auflage, 2008, S. 398.
ОСОБЕННОСТИ РАСЧЕТА ИПРОЕКТИРОВАНИЯ ВЕТРОЭНЕРГЕТИЧЕСКИХ УСТАНОВОК
МАЛОЙ МОЩНОСТИ
Волков Д. А., Турубанов М. А.Санкт-Петербургский государственный университет
аэрокосмического приборостроения
В настоящее время во всем мире в силу экономических и экологиче-ских проблем наблюдается повышенный интерес к альтернативным ис-точникам энергии, в частности, к ветроэнергетике. Появляется большоеколичество новых и хорошо забытых старых технических предложений,но в новом конструктивном исполнении.
В данной работе авторами рассмотрены основные этапы проектиро-вания ветроэнергетических установок (ВЭУ) малой мощности (до 5 кВт).

29
Рассмотрены основные варианты конструкций лопастей ветрогенераторовдвух типов исполнения: с горизонтальной осью вращения и вертикальной,приведены оценочные размеры лопастей для заданных мощностей (рис. 1).
Рис. 1. Оценочные размеры лопастей ветроколесадля заданных мощностей
Также в работе рассмотрены варианты исполнения ветрогенераторовс использованием высокотемпературной сверхпроводимости (ВТСП), воз-можности сочетания нескольких ВТСП ветрогенераторов с целью умень-шения площади, занимаемой ВЭУ.
Рассмотрены вопросы, связанные с оптимизацией конструкции се-чения лопасти, поскольку они находятся в разных энергетических состоя-ниях из-за различия в них окружных скоростей и углов атаки. Это разли-чие значительно снижается благодаря скрутке сечений лопасти одного от-носительно другого.
Рассмотрены особенности инерционного нагружения лопасти, атакже целесообразность сужения ее профиля к концу лопасти. Кроме того,рассмотрены вопросы сборки лопасти вертикально-осевой ВЭУ из отдель-ных секций, что представляет значительную трудность ввиду необходимо-сти организации фланцевых стыков.
Оценено изменение значения снимаемой энергии по длине лопастивертикально-осевой ВЭУ, причем это изменение зависит только от изме-нения качества энергии ветрового потока: наличия порывов ветра,
30
непостоянства скорости ветра по высоте. Также, рассмотрены причиныпотерь снимаемой энергии - неоптимальные углы атаки, в разных положе-ниях лопасти на окружности вращения, падение моментов вращения вет-ротурбины в положениях, когда лопасть движется вдоль потока, и сниже-ние моментов вращения от лопасти, проходящей аэродинамическую теньбашни.
В ходе работы получены следующие выводы:1. Количество лопастей не оказывает влияния на значение установ-
ленной мощности;2. Мощность ВУ определяется исключительно скоростью ветра, гео-
метрическими размерами ротора (ветроприемного устройства) и эффек-тивностью использования энергии ветра.
Литература:
1. Логинов В. Б., Новак Ю. И. Высокоэффективные ветроэнергетиче-ские установки / Проблемы машиностроения и автоматизации. 1995. № 1-8.
2. Подгуренко В. С., Бордюгов В. Н. Об ошибочных утверждениях,дискредитирующих ветроэнергетику // Энергетика и электрификация. – К.,2000. - № 12.- С. 49-53.
СЕБЕСТОИМОСТЬ ОБРАБОТКИ ПРИ ИСПОЛЬЗОВАНИИМЕХАНИЗИРОВАННОГО НАЛАДОЧНОГО
ПРИСПОСОБЛЕНИЯ
Гринев Д. В.Псковский государственный университет
Для изготовления одних и тех же деталей могут применяться раз-личные конструкции станочных приспособлений, обеспечивающих тре-буемое качество обработки. Однако, данные приспособления будут отли-чаться по производительности и стоимости.
При выборе и проектировании приспособления необходимо сравни-вать различные варианты конструкций на основе технико-экономическогоанализа, суть которого заключается в определении себестоимости обра-ботки заготовки в приспособлении.

31
В современном машиностроении наиболее широко применяются ме-ханизированные приспособления: пневматические и гидравлические. При-менение пневматических и гидравлических приводов обеспечивает воз-можность повышения производительности и качества обработки.
Одной из разновидностей механизированных приспособлений явля-ются наладочные. Сменные наладки расширяют технологические возмож-ности базовой части приспособления.
При определении себестоимости обработки с применением подоб-ных приспособлений, как правило, недостаточно сведений, указанных втрадиционной и современной литературе по технологической оснастке.
Анализ компоновочной схемы механизированного наладочного при-способления позволил сформировать формулу для расчета себестоимоститехнологической операции, выполняемой с применением данного видаприспособлений:
NSg
iNA
NPZLC З
нэ
сн
н 1100
1
, (1)
где ЗL – основная заработная плата рабочего, приходящаяся на одну заго-товку, руб.; Z – процент цеховых накладных расходов, %. N – годоваяпрограмма выпуска деталей, шт.; нA – себестоимость изготовления смен-ной наладки, руб.; снi – срок службы сменной наладки, годы; эg – коэффи-циент затрат на эксплуатацию; нS – расходы на конструирование и отлад-ку сменной наладки, руб.
Расходы на конструирование и отладку сменной наладки:
отладкапннн gAS , руб. (2)
где пнg – коэффициент проектирования сменной наладки.P – годовые затраты на эксплуатацию приспособления с различны-
ми типами приводов, руб. В общем случае годовые затраты складываютсяиз затрат на эксплуатацию базовой части приспособления, привода и ис-точника давления.
Расчетные зависимости годовых затрат на эксплуатацию механизи-рованных универсальных, специализированных и специальных приспо-соблений с различными приводами приведены в [1]. Однако, данные

32
зависимости содержат лишь готовые значения коэффициентов, а, значит,могут быть применимы только для идентичных начальных условий.
Анализ данных коэффициентов позволил получить аналитическиезависимости для каждого из них, что позволяет рассчитать годовые затра-ты для механизированных приспособлений при варьирующихся исходныхданных.
Затраты на проектирование и эксплуатацию специальных приспо-соблений:
AAgigAPc 85,02,0
23,011
эс
п
, руб. (3)
где A – стоимость механизированного приспособления, руб. Здесь дляспециальных приспособлений нормативный срок амортизации принят двагода ( 2с i ), расходы на содержание – 20 % от стоимости приспособления( 2,0э g ), а затраты на проектирование – 30 % от стоимости приспособле-ния ( 3,0п g ).
Затраты на эксплуатацию универсальных и специализированныхприспособлений:
AAgi
APу 42,03,0811
эс
, руб. (4)
Затраты на эксплуатацию источников давления ( истP ) и двигателей ( прP ):
истистэс
истист 42,03,0811 CCg
iCP
, руб. (5)
прпрэс
прпр 42,03,0811 AAg
iAP
, руб. (6)
где прA – стоимость привода, руб.; истC – стоимость источника давле-
ния, руб.На этапе проектирования для сравниваемых вариантов приспособ-
лений стоимость привода и источника давления следует определить по ук-рупненным нормативам данных.

33
Источник гидравлического или пневматического давления можетбыть встроен в станок, на котором установлено приспособление, т. е. яв-ляться узлом этого станка или быть стационарным независимым, напри-мер гидравлический мотор, пневмогидроаккумулятор или компрессорнаястанция.
В случае использования в приспособлении пневматического приводаудельные затраты на подвод сжатого воздуха малы и ими можно пренеб-речь. Тогда в формулах для расчета годовых затрат на эксплуатацию пнев-матических приспособлений можно не учитывать стоимость источникадавления истC .
Если в приспособлении применяется гидравлический привод, тостоимость источника давления следует определять по известной методикерасчета стоимости специального приспособления [2].
Для приближенных вычислений вместо расчета стоимости источни-ка давления можно использовать его цену. Однако, в этом случае наруша-ется принцип единства метода расчета, и результат может оказаться менееточным. Использование цены источника давления вместо его расчетнойстоимости приемлемо для расчета технико-экономических показателейуниверсальных приспособлений со стандартными приводами, цены кото-рых также заранее известны.
Литература:
1. Кузнецов Ю. И. Станочные приспособления с гидравлическимиприводами / М.: Машиностроение, 1972.
ОПТИМИЗАЦИЯ КОНСТРУКЦИИ ПОДЪЕМНИКА
Дмитриев С. И., Самаркин А. И., Евгеньева Е. А.Псковский государственный университет
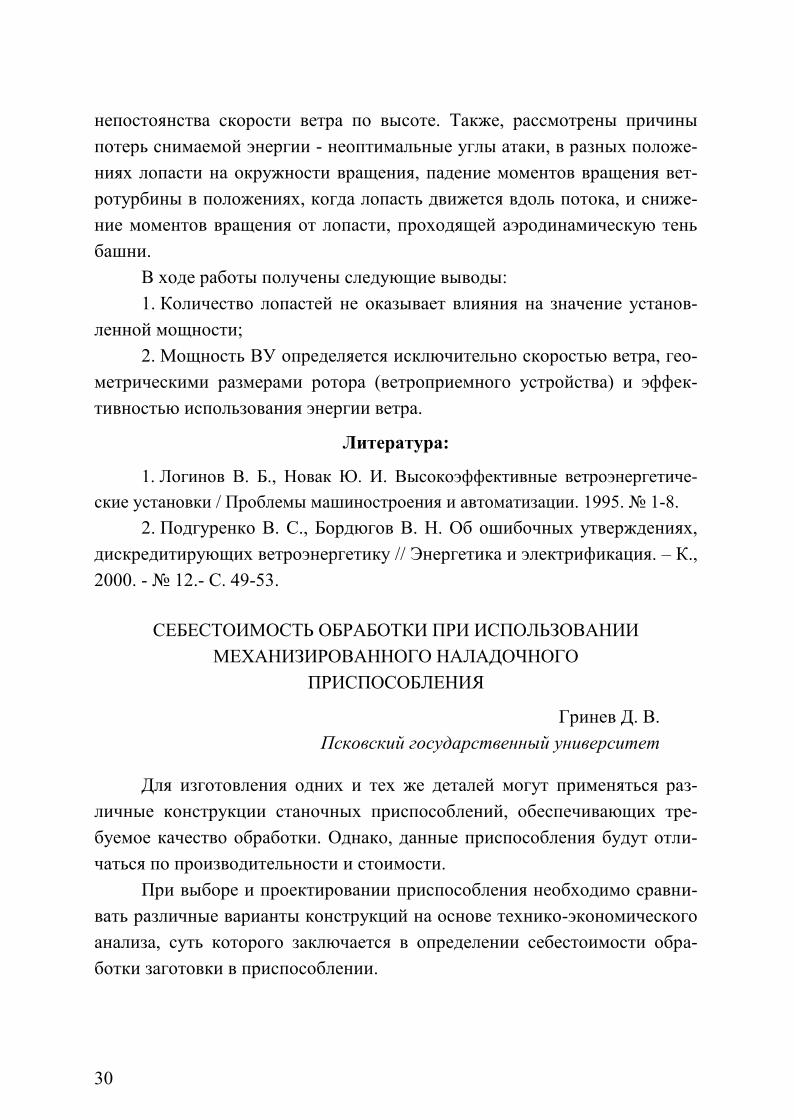
В настоящее время расширяется выпуск оборудования, предназна-ченного для автомобильных мастерских, в частности – разнообразныхподъемников, конструкции которых не отвечают критериям оптимально-сти, а зачастую и работоспособности, несмотря на пройденные процедурысертификации. В частности, используется следующая конструкция
34
подъемника малой грузоподъемности (от 200 кГ до 500 кГ) с центральнойбалкой и подкосом.
Рис. 1. Конструкция подъемника(1 – основание, 2 – балка,
3 – подкос, 4 – стрела,5 – гидроцилиндр)
Нагрузка P воспринимается стре-лой (4), закрепленной на основной бал-ке (2) и удерживается гидроцилин-дром (5). Положение в начале подъемапоказано пунктиром, а соответствующиепараметры даны с индексом 1.
Полагая известными длины компо-нентов, найдем реакции в подкосе и бал-ке, решая систему уравнений равновесияили треугольник сил:
cos1sin1cos 2cos 0
1sin 2sin cos2sin
R PR RR R P R P
Заметим, что реакции не зависят от размеров компонентов и что про-екции реакции подкоса 2R на балку и перпендикулярно ей составляют, со-ответственно: 2 2cos , 2 2sinh vR R R R , откуда:
cos2 , 2 cosh vR P R P
tg
Таким образом, поперечная нагрузка оси балки от закрепленногоподкоса зависит только от угла наклона балки, а осевая – еще и от угла ус-тановки подкоса.
Расчет нагрузок стрелы и гидроцилиндра имеет ряд особенностей,так как длина гидроцилиндра меняется при подъеме стрелы (предполага-ем, что подъем происходит от угла до горизонтального положения стре-лы).
Заметим, что D и по теореме косинусов длина гидроцилинд-ра составит:
2 2 2 cosGE DG DE DG DE
35
Заменяя гидроцилиндр его реакцией, запишем уравнение моментовотносительно шарнира D: cos 3 cos sinP DF R DE , откуда:
131 tan
DFR PDE
Из (1.4) следует, что максимальная реакция в гидроцилиндре возни-кает при горизонтальном положении стрелы, что позволяет несколько уп-ростить последующие выкладки, принимая 0 . Тогда получим длину
гидроцилиндра 2 2 2 cosGE DG DE DG DE .
Определим недостающие углы треугольника DEG по теореме сину-
совsin sin sin
GE DE DGD G E
, учитывая, что D . После некоторых пре-
образований получим:
2
sinsin
1 2 cos
EDE DEDG DG
Тогда, так как 13sin 3sin
DFR E DE P DF R PDE E
, то, для гори-
зонтального положения стрелы окончательно получим:
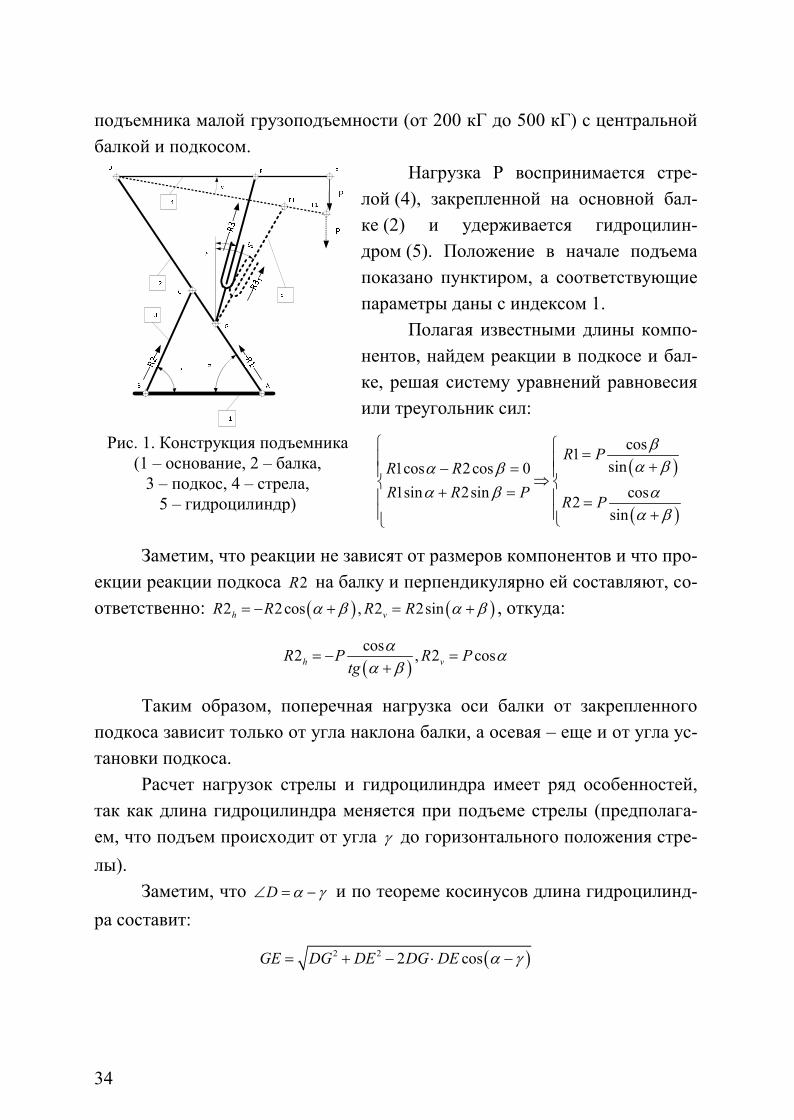
Рис. 2. Относительная реакцияв гидроцилиндре
21 / 2 / cos3
sinDE DG DE DGDFR P
DE a
Аналогичным образом, заменяя шарнирD его реакцией, получим:
1DDF DE DFR P P
DE DE
Графически (принимая, что / 4; / 2 , / 0.5;2DE DG и с точно-
стью до коэффициента DFPDE
) реакция в
цилиндре имеет вид – см. рис. 2.Наиболее опасными для балки и стрелы являются изгибающие на-
пряжения, причиной которых являются проекции реакций, перпендику-лярных оси балки. Так, для стрелы имеем – см. рис. 3.

36
Рис. 3. Эпюра изгибающих моментов стрелы подъемника
Для основной балки возможны две ситуации: подкос закреплен (точ-ка C) выше гидроцилиндра (точка G) или ниже, что соответствует двумвозможным эпюрам – см. рис. 4.
A
D
CR2
R3G
RD
A
D
CR2
R3G
RD
Рис.4. Эпюра изгибающих моментовбалки подъемника
Очевидно, что с учетомизложенного последний вари-ант является более предпочти-тельным, однако он требуетболее высокой подъемной си-лы в гидроцилиндре. В резуль-тате многокритериальной оп-тимизации представленнойконструкции по выявленнымзакономерностям для реакцийв стержнях и шарнирах уда-лось сформулировать опти-мальные соотношения разме-ров элементов подъемника.
Литература:
1. Артоболевский И. И., Теория механизмов и машин: Учебник длявтузов, М.: Наука. 1988 – 640 с.

37
ПЕРСПЕКТИВЫ ИСПОЛЬЗОВАНИЯИСЧЕРПАЕМЫХ ИСТОЧНИКОВ ЭНЕРГИИ
Егоров М. С., Бурлов В. Г.Санкт-Петербургский государственный
политехнический университет
На сегодняшний день углеводородные ресурсы признаны исчерпае-мыми и постоянной истощаются. Постоянное увеличение потребления уг-леводородных ресурсов способствует сохранению данного вида сырья впроизводстве энергии уже в обозримой перспективе.
Данная ситуация характерна и для России, чьи запасы углеводород-ного сырья постоянно истощаются. Даже с учетом новых открытых место-рождений мы не можем уверенно говорить о том, что данный энергетиче-ский ресурс с уверенностью покроет все энергетические потребности на-шего государства и планеты в целом в ближайшем будущем.
Проанализируем запасы основного вида сырья в России, широко ис-пользуемого на данный момент для производства энергии.
Сегодня Россия занимает 8 место в мире по разведанным запасамнефти, ее объем составляет 79 млрд. баррелей, что эквивалентно, пример-но 10.5 млрд. тонн, причем по темпам добычи мы уже обогнали Саудов-скую Аравию с ее запасами около 37 млрд. тонн нефти1. По данным минэ-кономразвития в 2010 году в России будет добыто 499 миллионов тоннсырой нефти. При таких темпах ее добычи Россия, как держава, лишитсянефтяных запасов через 21 год.
Похожая ситуация обстоит с запасами газа. На сегодняшний деньразведанные запасы этого ресурса в России являются крупнейшими в миреи составляют 43.3 трлн. куб. м2. Однако и по его добыче Россия так же за-нимает одно из ведущих мест в мире. Добыча газа в 2010 году составила
1 Разведанные запасы газа. [электронный ресурс]: сайт Информация. Страны мира. –Электрон. дан. – Режим доступа: http://iformatsiya.ru/tabl/30-zapasy-nefti.html – Загл. сэкрана.2 Разведанные запасы газа. [электронный ресурс]: сайт Информация. Страны мира. –Электрон. дан. – Режим доступа: http://iformatsiya.ru/tabl/33-zapasy-gaza-razvedannye-zapasy-gaza-v-mire.html – Загл. с экрана.

38
582 млрд. куб. м. При таких темпах его добычи газовые ресурсы исчерпа-ются примерно через 74 года.
В мире сегодня ежегодное его потребление составляет уже более2000 млрд. м3 и увеличивается на 2.3 % в год.
Продемонстрируем динамику истощения запасов газа при постоян-ном росте его потребления на рис. 1.
Рис. 1
По прогнозам МЭА3, российский валовый спрос на первичную энер-гию до 2030 года будет расти на 1.4 % в год при росте ВВП в 3 % в год иуменьшении энергоемкости на 1.6 % в год. Для прогнозируемого специа-листами роста ВВП экономика должна расти еще более высокими темпа-ми. Это также говорит о целесообразности развития возобновляемых ис-точников энергии4.
Развитие возобновляемой энергетики будет способствовать решениюэкономических, экологических и социальных проблем. Это особенно от-носится к регионам с дефицитом традиционных источников энергии.
3 МЭА – Международное энергетическое агентство4 Оценки ресурсов возобновляемых источников энергии в России. // Ю. С. Васильев,В. В. Елистратов, П. П. Безруких, Г. И. Сидоренко, СПбГПУ, 2008
39
ИННОВАЦИОННАЯ МОДЕРНИЗАЦИЯРОССИЙСКОЙ ЭЛЕКТРОЭНЕРГЕТИКИ НА ОСНОВЕ
ИНТЕЛЛЕКТУАЛЬНЫХ КОМПОНЕНТОВ И ТЕХНОЛОГИЙ
Задорожний А. В.Санкт-Петербургский государственный
политехнический университет
Интеллектуальные энергетические системы (ИЭС) с активно-адаптивной сетью являются органической частью современного техноло-гического уклада информационной экономики, в которой основными фак-торами производства являются интеллектуальный капитал и информация.В настоящее время в большинстве индустриально-развитых стран мира и вРоссии созданы интеллектуальные технологии и промышленно выпуска-ются компоненты и решения, необходимые для создания надежных, безо-пасных и эффективных ИЭС.
Экономическая стратегическая цель создания ИЭС состоит в воз-можности ведения наиболее надежного, безопасного и энергоэффективно-го режима работы ЭЭС в любой реальный момент времени при любых ме-няющихся условиях их внешней и внутренней среды. Помимо операцион-ной эффективности внедрение ИЭС позволяет существенно сократить ин-вестиционные ресурсы компаний вследствие отказа от ввода новых стан-ций из-за снижения электропотребления и уменьшения пиковых нагрузокпри интеллектуальном управлении спросом на электроэнергию.
Экспертные оценки показывают, что снижение пика нагрузки энер-госистем США на 5 % вследствие применения интеллектуальных систем иего регулирования позволит экономить до 66 млрд. долл. инвестиций в те-чение ближайших 20 лет, а установка «умных» технологий управленияспросом на энергию в жилищном секторе страны может обеспечить до-полнительно экономию до 325 млрд. долл. в течение этого периода. Поданным ФСК ЕЭС, построение ИЭС позволит уменьшить потери в россий-ских электрических сетях всех классов напряжения на 25 %, что даст эко-номию порядка 35 млрд. кВт·ч в год. Такой объем энергии в течение годавырабатывается несколькими электростанциями суммарной мощностью7,5 ГВт. По оценкам экспертов РАН, за счет развития такой интеллекту-альной сети можно уменьшить потребность в новых мощностях на 22 ГВт.
40
Почти на 35 млрд. долл. можно снизить объем инвестиций в развитие се-тевой инфраструктуры за счет увеличения пропускной способности сетейпо новым интеллектуальным технологиям.
Новый инновационный технологический базис ИЭС включает в себяпять групп ключевых областей, обеспечивающих прорывной характер:
- измерительные приборы и устройства, в первую очередь, интеллек-туальные счетчики и датчики;
- усовершенствованные методы управления: распределенные интел-лектуальные системы управления и аналитические инструменты для под-держки коммуникаций на уровне объектов ЭЭС, работающие в режиме ре-ального времени и позволяющие реализовать новые алгоритмы и методи-ки управления ЭЭС, включая управление ее активными элементами;
- усовершенствованные технологии и компоненты электрической се-ти: гибкие передачи переменного и постоянного тока, сверхпроводящиекабели, полупроводниковая силовая электроника, накопители энергии;
- интегрированные интерфейсы и системы поддержки принятия ре-шений, управление спросом, распределенная система мониторинга и кон-троля, распределенная система текущего контроля за генерацией, автома-тическая система измерения протекающих процессов, а также новые мето-ды планирования и проектирования как развития, так и функционированияэлектроэнергетической системы и ее элементов;
- интегрированные коммуникации, позволяющие элементам первыхчетырех групп обеспечивать взаимосвязь и взаимодействие друг с другом.
Поступательное развитие интеллектуальной электроэнергетики внашей стране становится ключевым фактором повышения конкурентоспо-собности и гарантией устойчивого экономического роста на основе инно-вационной модернизации.
Литература:
1. Волкова И. О., Окороков В. Р., Окороков Р. В., Кобец Б. Б. Кон-цепция интеллектуальных энергосистем и возможности ее реализации вроссийской электроэнергетике. М.: ИНП РАН, 2011.- 65 с.
2. Задорожний А. В., Окороков Р. В. Актуальные проблемы развитияэлектроэнергетики России // Экономические реформы в России: Сб. науч.трудов. СПб.: Изд-во Политехн. ун-та, 2010.- С. 92-98.
41
ЭКСПЕРИМЕНТАЛЬНЫЙ СТЕНДДЛЯ ИССЛЕДОВАНИЙ ТЕПЛОГИДРАВЛИЧЕСКИХ ХАРАКТЕРИСТИК
В ТЕПЛОВЫДЕЛЯЮЩИХ СБОРКАХЯДЕРНЫХ РЕАКТОРОВ НОВОГО ПОКОЛЕНИЯ
Захаренков А. В., Комов А. Т., Варава А. Н.,Болтенко Э. А., Дедов А. В., Мясников В. В.
НИУ «МЭИ»
В настоящее время в большинстве реакторных установок атомныхэлектрических станций (АЭС) используются стержневые твэлы,собранные в тепловыделяющие сборки (ТВС). Основной недостаток такихТВС заключается в сравнительно низких значениях удельнойобъёмной мощности реакторных установок и высоких температурах вцентре твэлов.
В рамках образовательной программы в НИУ «МЭИ» создан экспе-риментальный стенд, предназначенный для получения базы эксперимен-тальных данных по гидродинамике и теплообмену в перспективных ТВСядерных реакторов, к которым относятся трубчатые твэлы и микротвэлы.
Схема теплогидравлического контура представлена на рис. 1. Техно-логическая система (ТС) стенда позволяет проводить экспериментальныеисследования при параметрах, соответствующих штатным в реакторахВВЭР-1000. В состав ТС входят гидравлический контур с элементами на-грева и охлаждения, электротехническое силовое оборудование, автомати-зированные средства измерений и управления, система сбора и обработкиинформации, а также высокочастотная система индукционного нагрева(ВСН), построенная на базе генератора ВЧГ 9-60/0,44. ВСН обеспечиваетнагрев шаровой засыпки из металлических шариков, моделирующей ТВСс микротвэлами.
При выполнении исследований регистрируются следующие пара-метры: давление, перепад давлений, температура воды на входе и выходеиз рабочего участка, температура стенки рабочего участка, расход тепло-носителя, мощности вспомогательных нагревателей и мощности, выде-ляемой на рабочем участке, а также технологические параметры необхо-димые для управления стендом.

42
Рис. 1. Схема теплогидравлического контура(1 - рабочий участок, 2 - циркуляционный насос, 3 - компенсатор давления,
4, 5 - электрические нагреватели, 6 - балон с газом, 7 - экономайзер,8 - насос-дозатор, 9 - бак с дистиллированной водой,
10 - измерительные приборы)
Ниже приведены основные технологические и эксплуатационныепараметры теплофизического стенда:
теплоноситель - дистиллированная вода, максимальное давление - 16 МПа, максимальная температура теплоносителя - 348 oС, массовый расход теплоносителя - 0.005 – 1.36 кг/с, потребляемая электрическая мощность - до 400 кВт, общий расход охлаждающей воды на максимальных тепловых
нагрузках - 25.6 м3/час.Рабочий участок представляет собой кольцевой канал с внешним
диаметром d2 = 16,30 мм и внутренним диаметром d1 = 12,90 мм. Длинаобогреваемой части рабочего участка – 700 мм. Внутренняя труба обра-зующая выпуклую поверхность трубчатого твэла обогревается электриче-ским током, при этом электросиловое оборудование позволяет получитьплотность теплового потока до 5 МВт/м2.
43
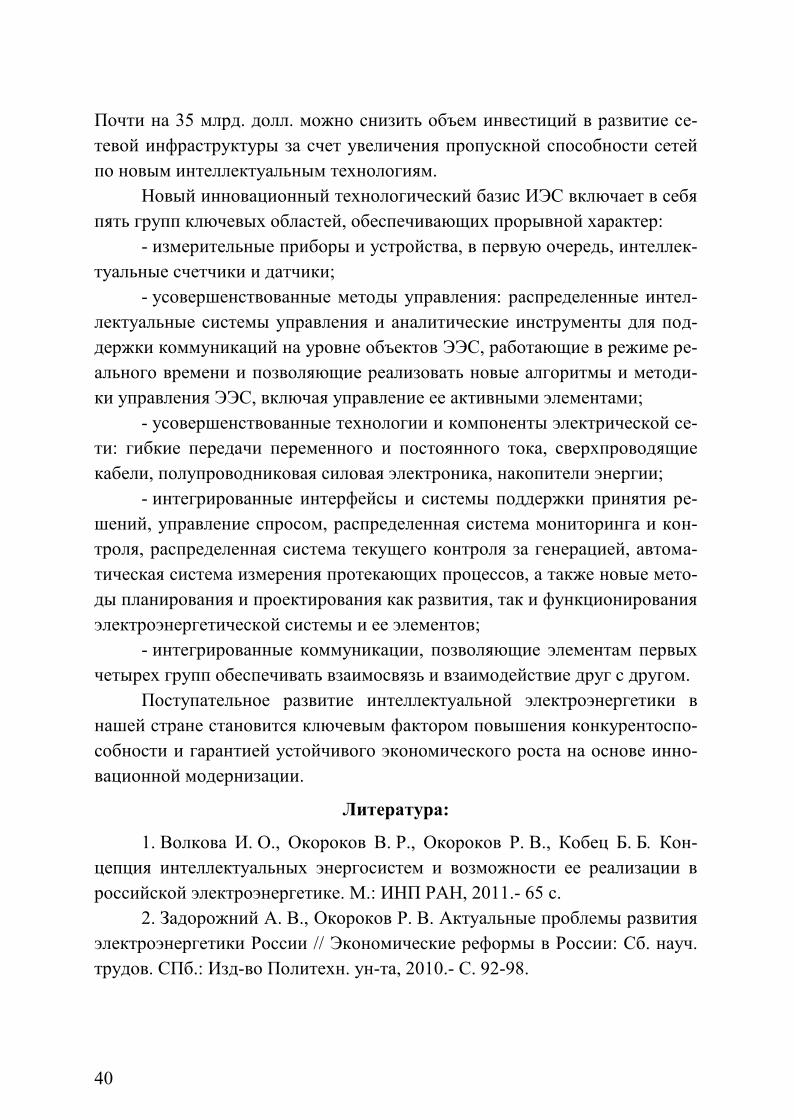
Определение температуры теплоотдающих поверхностей осуществля-лось кабельными хромель-алюмелевыми термопарами (диаметр кабеля –0,5 мм). Термопары размещались по длине и периметру нагреваемой трубы.
Наладочные тестовые испытания включали в себя измерения потерьдавления в изотермических условиях при различных значениях темпера-туры воды на входе в рабочий участок. Типичные зависимости потерь дав-ления от расхода представлены на рис. 2. Обработка экспериментальныхданных по потерям давления показала удовлетворительное соответствие(в пределах 5 %) с классическими соотношениями (Блазиус).
Рис. 2. Зависимость потерь давления от массового расхода теплоносителяпри разных температурах (1 – 20 oC, 2 – 60 oC, 3 – 100 oC, 4 – 150 oC)
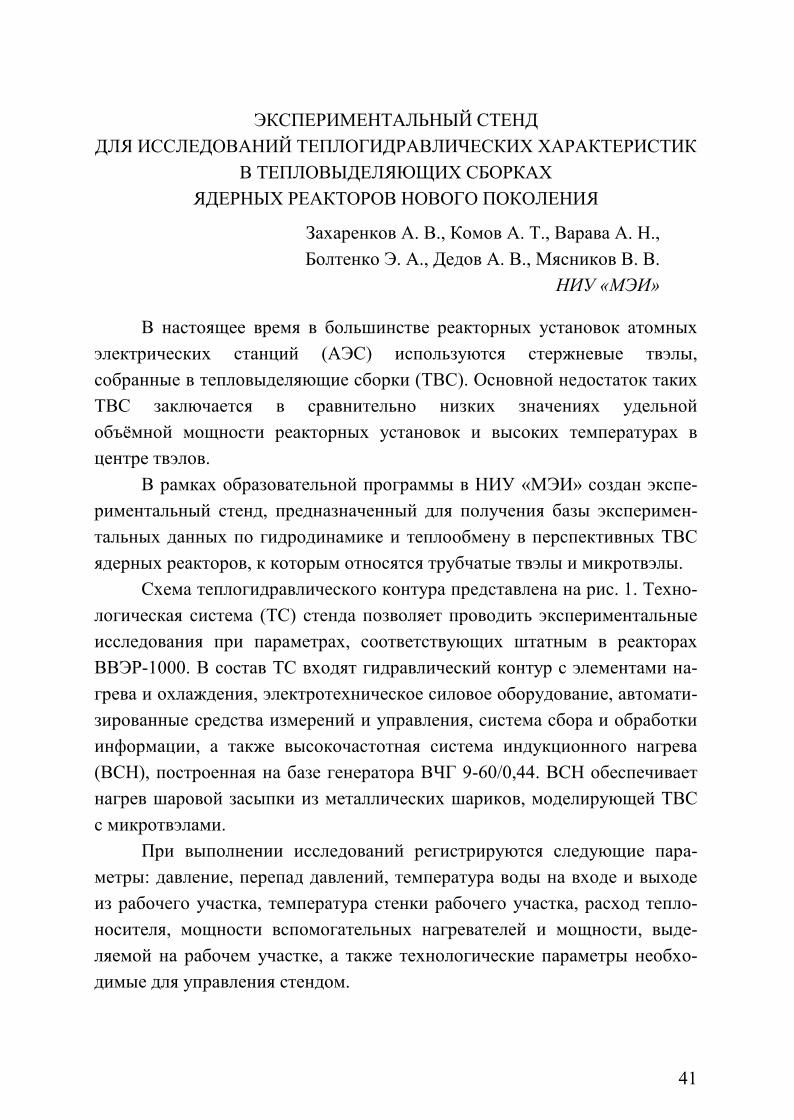
В процессе испытаний проводилась проверка теплового баланса, за-ключающаяся в сравнении мощности выделяемой нагревателем рабочегоучастка и мощностью воспринятой теплоносителем (калориметрическоймощностью). Результаты сравнения представлены на рис. 3.
Рис. 3. Сравнение значений электрической и калометрическоймощностей при разных значениях массового расхода теплоносителя
44
В дальнейшем планируется проведение работ по теплофизическомуобоснованию ТВС с трубчатыми твэлами и шаровой микротвэльной засыпкой.
Работа выполняется в рамках задания Федерального агентства пообразованию Минобрнауки по аналитической ведомственной программе«Развитие научного потенциала высшей школы», грант № 2.1.2 / 476.
Литература:
1. Блинков В. Н., Болтенко Э. А., Патент России 2220464 МКИ3G21C3/00, 3/30, 3/32. Тепловыделяющая сборка // Заявка № 2002104121 от20.02.2002. Открытия. Изобретения. 2003. № 36.
2. Zhao J., No H. C., Kazimi M. S., «Mechanical Analysis of High PowerInternally Cooled Annular Fuel», Nucl. Technology, 146 (2004).
3. Филиппов Г. А., Богоявленский Р. Г., Авдеев А. А., Перспективысоздания прямоточных микротвэльных ядерных реакторов с перегревомпара. – Тяж. машиностроение, 2002, № 1, с. 7-11.
ПРИМЕНЕНИЕ БРУТТО-УРАВНЕНИЙ ДЛЯ ОПИСАНИЯТЕРМОЛИЗА ЧАСТИЦ МИНЕРАЛЬНОЙ ЧАСТИ ТОПЛИВ
Захаров В. Ю., Щелкунова П. И.Санкт-Петербургский государственный
политехнический университет
В работах В. М. Гурджиянца сделаны достаточно удачные попыткиописать брутто-процесс пиролиза углей по однокомпонентной схеме какдля крупных частиц с характерным размером , так и для мелкихс , причём использовались кинетические параметры, определён-ные для изотермических условий пиролиза мелких частиц.
По результатам экспериментальных исследований авторов, частицыс размером разлагаются, как правило, в диффузионной области,по крайней мере, частицы минеральной части твёрдых топлив. Таким об-разом, результаты описания термолиза различных частиц, реагирующих вразличных областях одними и теми же уравнениями с одними и теми жеконстантами, не должны были хорошо совпадать с экспериментом.
Ранее авторами были определены и опубликованы кинетические па-раметры термического разложения всех основных минералов, образующих

45
минеральную часть твёрдых топлив. Поэтому была предпринята попыткаоценить применимость предложенных В. М. Гурджиянцем зависимостейдля описания термолиза частиц минеральной части различных размеров внеизотермических условиях с использованием кинетических параметров,определённых авторами для неизотермических условий в гарантированнокинетической области. Расчёты сопоставлялись с экспериментальнымикривыми зависимости массы частиц от времени и температуры (TG и DTGкривые) при линейном нагреве от комнатной температуры до . Ре-зультаты оказались неоднозначны. Для частиц минеральной части, разла-гающихся в кинетической области, предложенный брутто-подход к пиро-лизу дал вполне удовлетворительное совпадение с экспериментом. Одна-ко, для крупных фракций расхождение увеличивается с увеличением раз-мера частиц и для частиц с достигает . Похоже, что при этихразмерах существенную роль начинают играть диффузионные процессы иградиент температур в частицах. Следует отметить, что в промышленныхусловиях, когда скорость нагрева частиц, вброшенных в топочную камеру,достигает, роль диффузионного торможения и градиента температур резковозрастёт.
Таким образом, описание термического разложения частиц мине-ральной части резко различных размеров одними и теми же брутто-уравнениями, без учёта зоны реагирования, будет неизбежно сопровож-даться значительными погрешностями.
ТЕОРЕМА ШАКИРОВА М. А.ОБ ИСКРИВЛЕНИИ ПРОСТРАНСТВ В РАСЧЕТАХ СИЛ,
ДЕЙСТВУЮЩИХ НА ТОКОВЕДУЩИЕ СИСТЕМЫ
Ионин С. А.Санкт-Петербургский государственный
политехнический университет
Теорема о расчете электромагнитной силы 0zf (Шакиров М. А. //Журн. техн. физики. 1994, том 64, № 7), действующей на линейный ток i0 ,внедрена в Практикум по ТОЭ, ч. 3, СПб, 1995, и используется студентами3-го курса ЭлМФ при выполнении проектных заданий.
46
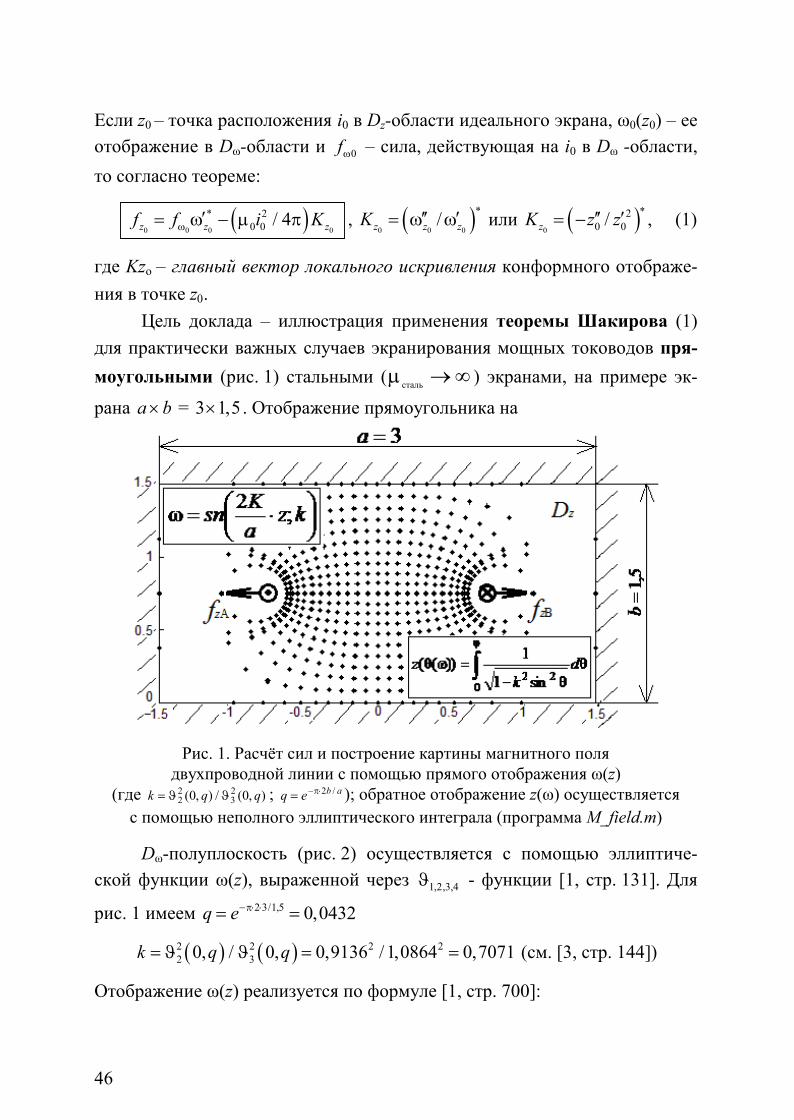
Если z0 – точка расположения i0 в Dz-области идеального экрана, ω0(z0) – ееотображение в Dω-области и 0f – сила, действующая на i0 в Dω -области,то согласно теореме:
0 0 0 0
* 20 0 / 4z z zf f i K , 0 0 0
*/z z zK или 0
20 0/zK z z , (1)
где Kzo – главный вектор локального искривления конформного отображе-ния в точке z.
Цель доклада – иллюстрация применения теоремы Шакирова (1)для практически важных случаев экранирования мощных тоководов пря-моугольными (рис. 1) стальными ( сталь ) экранами, на примере эк-
рана a b = 3 1,5 . Отображение прямоугольника на
Рис. 1. Расчёт сил и построение картины магнитного полядвухпроводной линии с помощью прямого отображения ω(z)
(где ),0(/),0( 23
22 qqk ; abeq /2 ); обратное отображение z(ω) осуществляется
с помощью неполного эллиптического интеграла (программа M_field.m)
Dω-полуплоскость (рис. 2) осуществляется с помощью эллиптиче-ской функции ω(z), выраженной через 1,2,3,4 - функции [1, стр. 131]. Для
рис. 1 имеем 2 3/1,5 0,0432q e
2 2 2 22 30, / 0, 0,9136 /1,0864 0,7071k q q (см. [3, стр. 144])
Отображение ω(z) реализуется по формуле [1, стр. 700]:

47
12 64
14 9
4
2 sin sin3 sin5 ...1 11 2 cos2 cos4 cos6 ...
q v q v q vvz
v q v q v q vk k
, (2)
где azv / . Производные, входящие в (1), вычисляются путём их взятияот выражения (2). Прямой линейный ток i0 проходит через точкуzA = (– 0,75 + j0,75), а обратный – через точку zB = (0,75 + j0,75). Согласно(1) рассчитываем:
A -1,0987 + j0,4551 B 1,0987 + j0,4551.
Используя метод зеркальных отображений, находим силы вDω-полуплоскости (рис. 2):
876168714
20 ,j,if A
A
(Н/м), 87616871
4
20 ,j,if B
B
(Н/м)
Рис. 2. Расчёт сил и построение картины магнитного поля двухпроводной линиив Dω-полуплоскости, конформно связанной с Dz-областью
Далее находим первые и вторые производные отображающей функции:
A' 0,3978 + j 0,9603·10-7 , B' 0,3978 - j 0,9603·10-7 ,
A'' 1,5346 + j1,3309 , B'' -1,5346 + j1,3309.
Главные векторы локального искривления отображения в точках zA и zB
равны:
zAK 1,7480 + j0,8740, zBK -1,7480 + j0,8740.

48
Таким образом, сила, действующая на линейный ток iA, согласно (1),получается равной:
*2 2 2
0 0 01,5346 1,33092,473 0,874 4,2204 4 0,3978 0,9603 4
A A AzA
i i ijf jj
(H/м)
Собственная индуктивность двухпроводной линии (радиусы проводов
1a = 2a = 0,0125 a ) на единицу длины рассчитывается по формуле[2, стр. 110, 112]:
21
200
21
20
41
242 hhdln
aadlnL , (3)
где 1 2 1 ' 0,039Aa a a (м) – радиусы проводов в Dω-области,
21 hh 0,455Aimag (м) – расстояния от осей проводов до полуплос-
кости в Dω-области, м,d BA 1972 – расстояние между проводами в
Dω-области.Подставляя численные значения, получаем:
мГн,
,,,ln
,,,lnL 70 109917
45504550482841
21
039003908284
2.
В случае массивных медных или алюминиевых тоководов спостоянным током J, разбиваем сечение токовода на элементарныеучастки ΔSi, где i – номер участка. Ток элементарного участка: Ji=δ· ΔSi, где
SJ / , S – площадь сечения токовода, i = 1...n, где n – числоэлементарных участков. Элементарный провод заменяется нитью стоком Ji, проходящим через центр тяжести участка zi. Искомая силаопределяется путём векторного суммирования сил, действующих на эти нити.
Литература:
1. Янке Е., Эмде Ф., Лёш Ф. Специальные функции. Наука, 1964.2. Практикум по ТОЭ, Ч. 3: Учеб. пособие/ под ред. Шакирова М. А.,
СПб, 1995.3. Теоретические основы электротехники. Новые идеи и принципы.
Схемоанализ и диакоптика. СПб.: Изд-во СПбГТУ, 2001.
49
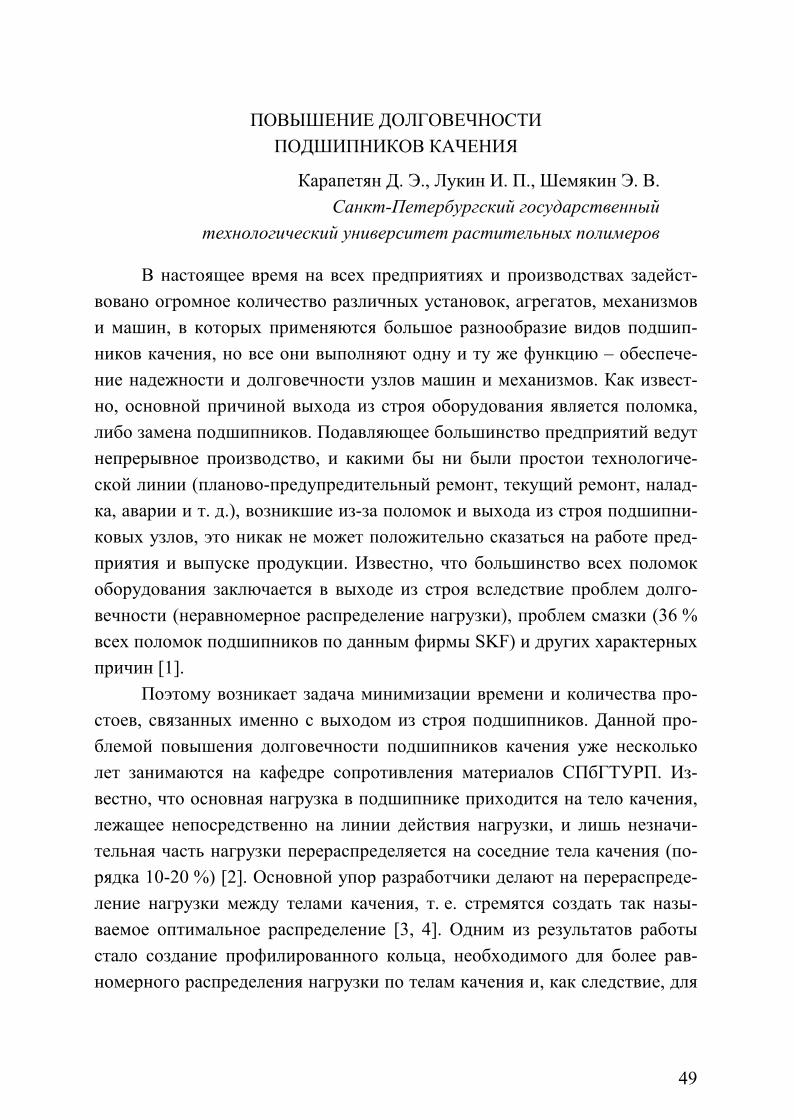
ПОВЫШЕНИЕ ДОЛГОВЕЧНОСТИПОДШИПНИКОВ КАЧЕНИЯ
Карапетян Д. Э., Лукин И. П., Шемякин Э. В.Санкт-Петербургский государственный
технологический университет растительных полимеров
В настоящее время на всех предприятиях и производствах задейст-вовано огромное количество различных установок, агрегатов, механизмови машин, в которых применяются большое разнообразие видов подшип-ников качения, но все они выполняют одну и ту же функцию – обеспече-ние надежности и долговечности узлов машин и механизмов. Как извест-но, основной причиной выхода из строя оборудования является поломка,либо замена подшипников. Подавляющее большинство предприятий ведутнепрерывное производство, и какими бы ни были простои технологиче-ской линии (планово-предупредительный ремонт, текущий ремонт, налад-ка, аварии и т. д.), возникшие из-за поломок и выхода из строя подшипни-ковых узлов, это никак не может положительно сказаться на работе пред-приятия и выпуске продукции. Известно, что большинство всех поломокоборудования заключается в выходе из строя вследствие проблем долго-вечности (неравномерное распределение нагрузки), проблем смазки (36 %всех поломок подшипников по данным фирмы SKF) и других характерныхпричин [1].
Поэтому возникает задача минимизации времени и количества про-стоев, связанных именно с выходом из строя подшипников. Данной про-блемой повышения долговечности подшипников качения уже нескольколет занимаются на кафедре сопротивления материалов СПбГТУРП. Из-вестно, что основная нагрузка в подшипнике приходится на тело качения,лежащее непосредственно на линии действия нагрузки, и лишь незначи-тельная часть нагрузки перераспределяется на соседние тела качения (по-рядка 10-20 %) [2]. Основной упор разработчики делают на перераспреде-ление нагрузки между телами качения, т. е. стремятся создать так назы-ваемое оптимальное распределение [3, 4]. Одним из результатов работыстало создание профилированного кольца, необходимого для более рав-номерного распределения нагрузки по телам качения и, как следствие, для
50
повышения долговечности всего подшипника. На рис. 1 показано кольцо,которое устанавливается в подшипниковом узле между корпусом и самимподшипником. Оно имеет переменную толщину, спрофилированную дву-мя дугами окружностей.
Рис. 1. Профилированное кольцо: R0 – наружный радиус кольца;R1, О1 – радиус и центр первой дуги, соответственно;R2, О2 – радиус и центр второй дуги, соответственно;
е1 – смещение центра первой дуги; е2 – смещение центра второй дуги
Важнейшими факторами, влияющими на распределение нагрузкимежду телами качения, являются упругие деформации контактирующихтел, радиальные зазоры и натяги между ними, а также жесткость колец икорпуса подшипника. Во всех существующих методиках расчета подшип-ников, как правило, не учитывается жесткость колец и корпуса подшипни-ка, что очень сильно искажает реальное распределение нагрузки между те-лами качения (см. статью тех же авторов в этом сборнике «Влияние жест-кости подшипникового узла на распределение нагрузки между телами ка-чения»).
В этой статье показано, что жесткость подшипникового узла играетзначительную роль в распределении нагрузки по телам качения, а, следо-вательно, и в долговечности всего подшипника. Исходя из этого, нами былвыбран путь, при котором та или иная жесткость части подшипникового

51
узла задается с помощью профилированного кольца, изображенного нарис. 1, что в свою очередь дает возможность перераспределять нагрузку потелам качения на наше усмотрение. Таким образом, появляется возмож-ность создания оптимального закона распределения нагрузки по телам ка-чения.
Для определения параметров профилированного кольца переменнойжесткости была спроектирована объемная модель подшипника и проведенеё расчет в объемном состоянии методом конечных элементов. Учитыва-лись перемещения и деформации всех деталей подшипника. Внутреннеекольцо посажено на цапфу вала с натягом, а между телами качения икольцами, наружным кольцом и корпусом задан зазор, как в реальномподшипнике. В силу осевой симметрии рассматривалась одна половинаподшипника. На рис. 2 изображен подшипник качения с величинами уси-лий, возникающих в местах контакта тел качения и наружного кольца,вследствие действия внешней нагрузки на подшипниковый узел.
Рис. 2. Распределение нагрузки в подшипнике качения
52
Для создания необходимого оптимального закона распределения на-грузки по телам качения используется профилированное кольцо перемен-ной жесткости, параметры которого определяются расчётом методом ко-нечных элементов, используя оптимизацию. Далее, зная все необходимыпараметры, а именно: величину нагрузки, тип подшипника, конструкциюкорпуса и, как следствие, просчитанную геометрию профилированногокольца, возможно создание нового или модернизация существующегоподшипникового узла с повышенным ресурсом работы.
Литература:
1. SKF Maintenance Products, Nieuwegein, The Netherlands. 2006. P. 4.2. Леликов О. П. Валы и опоры с подшипниками качения. Конструи-
рование и расчёт: справочник. - М.: Машиностроение, 2006.-640 с.3. Чижик Н. А., Шемякин Э. В., Костина Ю. В. Новая конструкция
подшипникового узла качения // Машины и аппараты ЦБП: межвуз. сб.науч. тр. / СПбГТУРП. – СПб., 2008. С. 55 – 58.
4. Лукин И. П., Шемякин Э. В., Костина Ю. В. Расчёт оптимальногораспределения нагрузки между телами качения подшипника // Машины иаппараты ЦБП: межвуз. сб. науч. тр. / СПбГТУРП. – СПб., 2010. С. 35 – 38.
СИНТЕЗ УПРАВЛЕНИЯ ДЛЯ ЭНЕРГОСИСТЕМЫНА ОСНОВЕ РЕДУКЦИИ МОДЕЛЕЙ
С СОХРАНЕНИЕМ СТАТИЧЕСКИХ РЕЖИМОВ
Козлов В. Н., Васильев А. Ю.Санкт-Петербургский государственный
политехнический университет
Рассматривается задача управления энергетическим объединением,состоящим из 6 энергетических узлов, между которыми осуществляетсяпередача мощности [1]. Энергообъединение описывается математическоймоделью, представленной в виде линейной стационарной системы, имею-щей шесть входов, шесть выходов и тридцать три переменных состояния.
Известно [2], что задача построения статического регулятора по вы-ходу в общем случае не всегда разрешима, и гарантируется только по-строение динамического регулятора, чей порядок больше или равен
53
порядку (числу переменных состояния) регулируемой системы. Таким об-разом, задача построения регуляторов для крупномасштабных систем яв-ляется сложной как с вычислительной точки зрения, так и с точки зренияпрактической реализации. В связи с этим в научной литературе рассматри-вается ряд методик, позволяющих понизить порядок конструируемых ре-гуляторов на основе различных теорий и методов.
Одной из таких теорий является теория редукции математическихмоделей, работающая непосредственно с сокращением числа переменныхсостояния при сохранении некоторых инвариантных свойств исходнойсистемы (например, моментов передаточной функции). Одной из наиболееэффективных групп методов в теории редукции является группа методов,основанных на сингулярных числах Ганкеля, связывающих между собойграмианы управляемости и наблюдаемости рассматриваемой системы [4].
Существенным недостатком базового метода редукции по сингуляр-ным числам Ганкеля является то, что при редукции модели не сохраняетсязначение передаточной функции (матрицы передаточных функций) принулевой частоте. В случае рассматриваемого энергообъединения это соот-ветствует статическим режимам модели.
В связи с этим для решения задач управления энергообъединениемрегулятором низкого порядка с сохранением статических режимов у реду-цированной модели предлагается использование метода аппроксимациипо сингулярному возмущению, также входящего в вышеозначеннуюгруппу методов. В таком случае задача построения регулятора низкого по-рядка сводится к одному из двух подходов: редукции исходной системыдо нужного низкого порядка и последующему построению динамическогорегулятора соответствующего этого же порядка, либо построению регуля-тора высокого порядка для исходной системы с его последующей редук-цией до максимально возможного низкого порядка с приемлемойточностью.
Литература:
1. Козлов В. Н. Управление энергетическими системами. Электроме-ханические процессы / под. ред. Ю. С. Васильева. СПб.: изд-во СПбГТУ,2011. – 480 с.

54
2. Поляк Б. Т. Робастная устойчивость и управление /Б. Т. Поляк,П. С. Щербаков. М.: Наука, 2002. – 303 с.
3. Liu Y., Anderson B. D. O. Singular perturbation approximation of bal-anced systems. International Journal of Control, 1989.
4. Moore B. C. Principal component analysis in linear systems: controlla-bility, observability, and model reduction / IEEE Transactions on AutomaticControl, 26(1), 1981. – С. 17–32.
ИССЛЕДОВАНИЕ АВАРИЙНЫХ РЕЖИМОВ В ЭЭСС ИСПОЛЬЗОВАНИЕМ ПОЛНЫХ МАТЕМАТИЧЕСКИХ
МОДЕЛЕЙ В ФАЗНЫХ КООРДИНАТАХ
Козлов В. Н., Рябов Г. А., Симаков И. П.Санкт-Петербургский государственный
политехнический университет
Рассматривается полная математическая модель динамики трехфаз-ного синхронного генератора (СГ) в фазных координатах (рис. 1) [5].
Модель учитывает автоматические регуляторы напряжения и часто-ты при различных нагрузках, в частности активно-индуктивную нагрузку(АИН). Модель позволяет исследовать переходные процессы в электро-энергетических системах (ЭЭС) в аварийных режимах (при коротких за-мыканиях, обрывах в статорных и роторных обмотках и др.), которые немогут быть рассчитаны с помощью модели Парка-Горева [1, 3, 4].
aE
cEbE
fU
Рис. 1. Электрическая схема замещения трехфазного СГ
Структурная схема агрегата представлена на рис. 2Модели СГ в фазных координатах и в форме Парка-Горева про-
граммно реализованы в среде отечественного программного комплекса
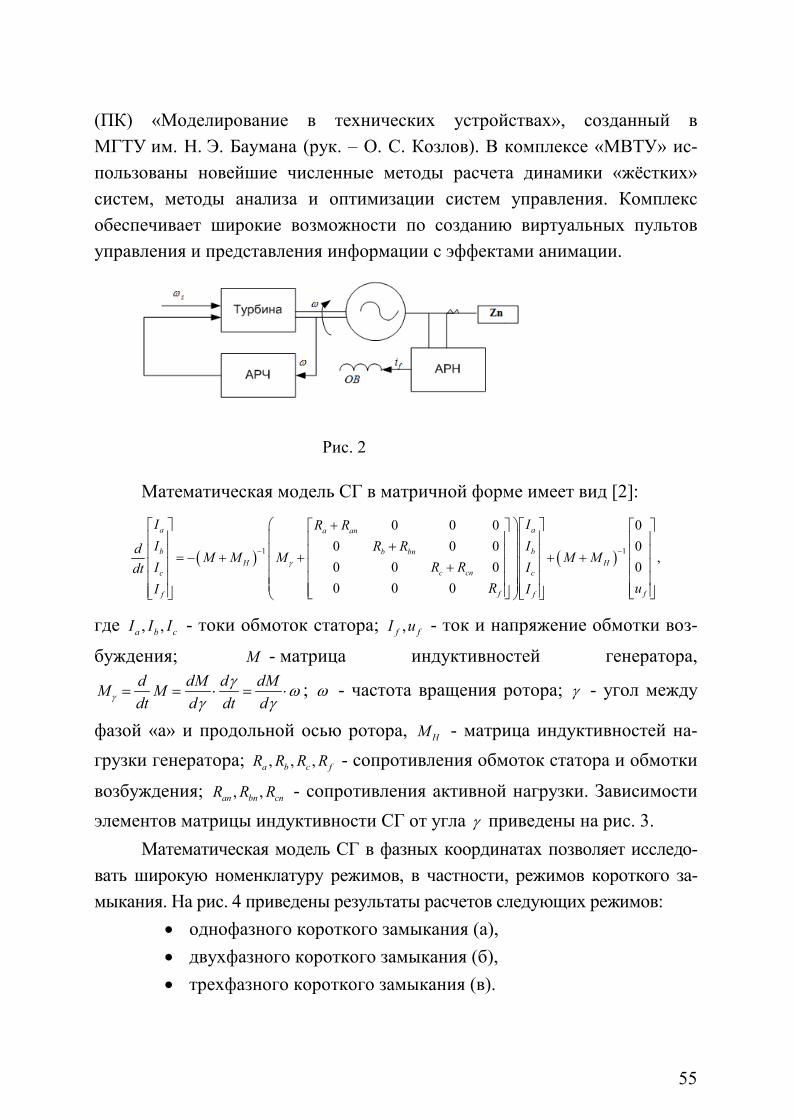
55
(ПК) «Моделирование в технических устройствах», созданный вМГТУ им. Н. Э. Баумана (рук. – О. С. Козлов). В комплексе «МВТУ» ис-пользованы новейшие численные методы расчета динамики «жёстких»систем, методы анализа и оптимизации систем управления. Комплексобеспечивает широкие возможности по созданию виртуальных пультовуправления и представления информации с эффектами анимации.
Математическая модель СГ в матричной форме имеет вид [2]:
1 1
0 0 0 00 0 0 0
,0 0 0 00 0 0
a aa an
b bb bnH H
c cnc c
f ff f
I IR RI IR Rd M M M M M
R RI IdtR uI I
где , ,a b cI I I - токи обмоток статора; ,f fI u - ток и напряжение обмотки воз-
буждения; M - матрица индуктивностей генератора,d dM d dMM Mdt d dt d
; - частота вращения ротора; - угол между
фазой «a» и продольной осью ротора, HM - матрица индуктивностей на-грузки генератора; , , ,a b c fR R R R - сопротивления обмоток статора и обмотки
возбуждения; , ,an bn cnR R R - сопротивления активной нагрузки. Зависимостиэлементов матрицы индуктивности СГ от угла приведены на рис. 3.
Математическая модель СГ в фазных координатах позволяет исследо-вать широкую номенклатуру режимов, в частности, режимов короткого за-мыкания. На рис. 4 приведены результаты расчетов следующих режимов:
однофазного короткого замыкания (а), двухфазного короткого замыкания (б), трехфазного короткого замыкания (в).
Рис. 2
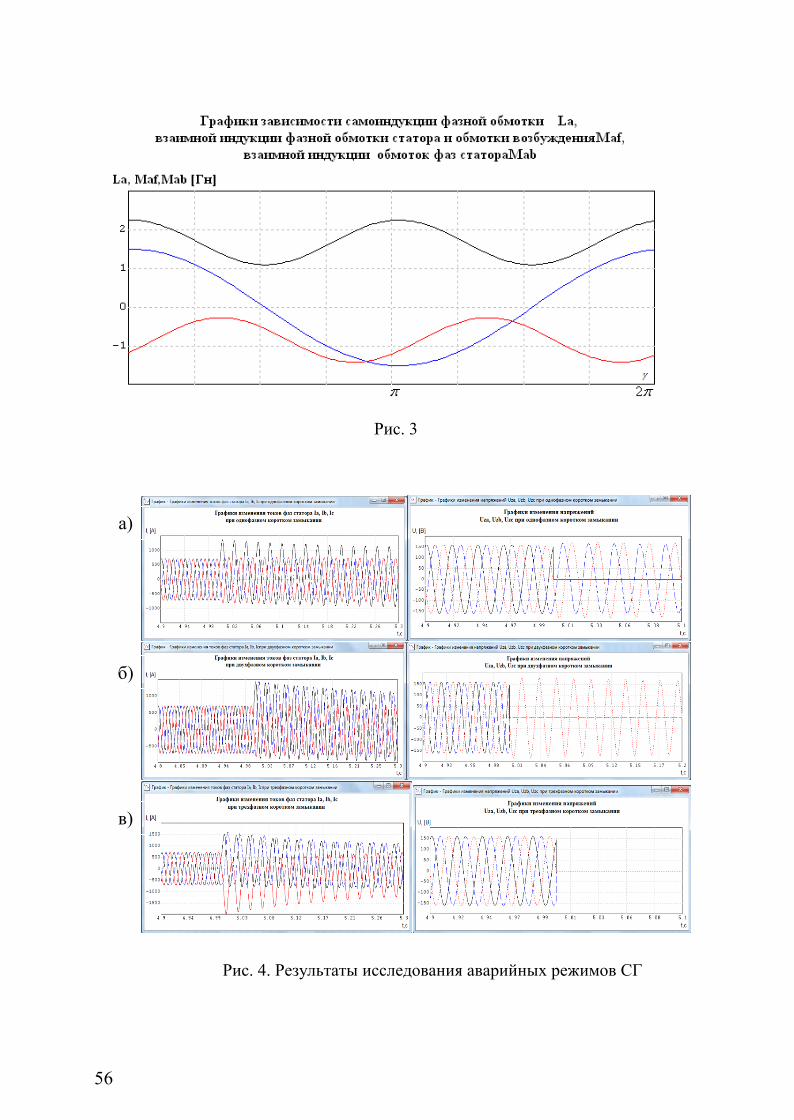
56
Рис. 3
Рис.
4
Рис. 4. Результаты исследования аварийных режимов СГ
а)
б)
в)

57
Выводы:1. Разработана и программно реализована полная компьютерная мате-
матическая модель динамики синхронного генератора в фазных координатахс автоматическими регуляторами напряжения, частоты вращения ротора истатической активно-индуктивной нагрузкой, предназначенная для исследо-вания широкого набора аварийных режимов, которые невозможно исследо-вать с использованием традиционных моделей Парка-Горева.
2. Разработаны алгоритмы получения необходимых для реализациимоделей в фазных координатах функциональных зависимостей индуктив-ностей и взаимных индуктивностей различных обмоток по справочнойинформации о параметрах и характеристиках, приводимых для обеспече-ния расчетов динамики на основе уравнений Парка-Горева.
Литература:1. Park R. H. Two-Reaction of Synchronous machines. – Trans. AIEE,
v. 48., pt. 1, 1929, p. 716 – 730.2. Бутырин П. А., Чинь Хунг Лян. Аналитическое обращение матриц
индуктивностей уравнений состояния электрических машин. – Электриче-ство, 1995, № 2.
3. Горев А. А. Основные уравнения неустановившегося режима синхрон-ной машины. - Труды Ленинградского индустриального института, № 5, 1936.
4. Токарев Л. Н. Введение в электроэнергетику. Физические процес-сы, устройства и системы автоматического регулирования. – СПб.: изд-во«АЛЕС», 1999. – 223 с.
5. Ясаков Г. С. Корабельные электроэнергетические системы. –ВМА, Санкт-Петербург, 1998. – 596 с.
МОДЕЛИРОВАНИЕ СИСТЕМЫ УПРАВЛЕНИЯИМУЩЕСТВЕНЫМ КОМПЛЕКСОМ ЭНЕРГОПРЕДПРИЯТИЯ
Кузичев В. М.Новосибирский государственный технический университет
В соответствии с базовыми принципами процессного подхода куправлению предприятием, для полноценного и наглядного представлениягенерирующего энергетического предприятия как бизнес-системы
58
необходимо разработать модель его организации, т. е. представить пред-приятие в виде совокупности деловых процессов.
При разработке модели деловых процессов генерирующего энерге-тического предприятия необходимо обеспечить ее соответствие следую-щим требованиям [2, С. 66]: конечности, которое заключается в наличии умодели конечного числа схожих свойств, которое подлежит изучению; уп-рощенности, которое неизбежно вытекает из требования конечности моделии означает, что модель системы всегда проще ее оригинала; приближенно-сти, которое характеризует степень близости модели к оригиналу; истин-ности, которое означает, что каждая модель должна содержать истинныесведения об оригинале; адекватности, которое означает, что требованияполноты, точности, истинности модели выполнены в той мере, котораядостаточна для достижения цели.
Необходимо представить деятельность генерирующего энергетическо-го предприятия в виде сети взаимосвязанных деловых процессов, кото-рая, в конечном счете, будет соответствовать всем перечисленнымтребованиям.
Естественно, что каждое конкретное генерирующее энергетическоепредприятие имеет уникальную схему организации деятельности. Тем неменее, сформированная модель отражает структуру деловых процессов,соответствующих, по мнению автора, требованиям наиболее эффективнойорганизации деятельности предприятия. Данная модель отвечает всем ука-занным выше требованиям (конечность, упрощенность, истинностьи т. д.).
Для разработки модели генерирующего энергетического предпри-ятия, которая отражала бы все механизмы, взаимосвязи различных под-систем и процессов в рамках одного бизнеса, целесообразно использоватьметодологию моделирования IDEF0 [1, 3]. IDEF0 является наиболее рас-пространенной методологией моделирования деловых процессов в связи сее относительной простотой и наглядностью. Так же методология IDEF0принята в качестве национального стандарта моделирования деловых про-цессов в России.
Сеть деловых процессов генерирующего энергетического предпри-ятия представлена на рис. 1.

59
Рис. 1. Сеть деловых процессовгенерирующего энергетического предприятия
Деловой процесс «Обеспечить производство тепловой и электриче-ской энергии» по отношению к продукции относится к процессам жизнен-ного цикла, а с точки зрения стратегической важности – к категории ос-новных. Именно этот процесс определяет основные направления бизнесаэнергетического предприятия – производство и реализацию тепловой иэлектрической энергии. Деловой процесс «Обеспечить производство теп-ловой и электрической энергии» (ДП 4) отражает производственную дея-тельность генерирующего энергетического предприятия. Структурно про-цесс состоит из трех подпроцессов:
- разработать план производства и организовать производственныйпроцесс (ДП 4.1);
- обеспечить выполнение требований по промышленной безопасно-сти и охране окружающей среды (ДП 4.2);
- произвести электрическую и тепловую энергию (ДП 4.3).Все остальные процессы, указанные на рис. 1, можно отнести к кате-
гории обеспечивающих.

60
Декомпозиция делового процесса «Обеспечить управление имуще-ственным комплексом» (ДП 3) представлена на рис. 2.
Сбалансированная система управления имущественным комплексом,ориентированная на стратегические цели генерирующего энергетическогопредприятия и обеспечение надежности энергоснабжения.
Рис. 2. Декомпозиция делового процесса«Обеспечить управление имущественным комплексом» (ДП 3)
Подпроцесс «Определить состояние имущественного комплекса»является исключительно важным в плане получения исходной информа-ции для организации всего последующего перечня работ по управлениюимущественным комплексом. В рамках рассматриваемого процесса можновыделить следующие подпроцессы: собрать исходную информацию о со-стоянии объектов имущественного комплекса (ДП 3.1.1); провести пас-портизацию объектов имущественного комплекса (ДП 3.1.2); осуществ-лять мониторинг состояния объектов имущественного комплекса в меж-ремонтный период (ДП 3.1.3);обеспечить учет дефектов, аварий и отказовна объектах имущественного комплекса (ДП 3.1.4); обеспечить хранениеинформации о состоянии объектов имущественного комплекса – обеспе-чить ведение базы данных (ДП 3.1.5).
61
На первом этапе необходимо собрать все релевантную информациюо состоянии объектов имущественного комплекса предприятия (год введе-ния в эксплуатацию, данные о техническом состоянии, условиях эксплуа-тации, периодичность и виды проводимых ремонтов и иных мер, направ-ленных на продление жизненного цикла объектов имущественного ком-плекса).
В систематизированном виде собранная об объектах имущественногокомплекса информация находит отражение в паспортах объектов. В рамкахинформационной системы управления имущественным комплексом на осно-ве настроенных шаблонов структур данных создаются паспорта объектовимущественного комплекса, таких как основное и вспомогательное оборудо-вание, здания и сооружения и т. д. В паспорта вносится информация для од-нозначной идентификации объектов имущественного комплекса, паспортныехарактеристики, первоначальные данные о техническом состоянии (необхо-димо для прогноза отказов оборудования и технического состояния), выпол-няется классификация и формируется иерархия объектов. Интеграция рас-сматриваемого процесса с процессом производства тепловой и электрическойэнергии позволит оперативно и достоверно оценивать такое важное свойствообъекта имущественного комплекса как производительность и отражать ин-формацию о ее динамике в паспорте объекта.
Процедуры процесса мониторинга оборудования в межремонтный пе-риод обеспечивает ввод контролируемых параметров при выполнении техни-ческого диагностирования. Структура данных для различных видов диагно-стирования определяется процессами инженерного обеспечения. В системувносятся результаты диагностирования и указываются возможные вариантырешения, оформленные в виде потребности в дополнительных мероприятияхи ограничениях. После подтверждения, эта информация становится доступнасоответствующим специалистам для организации разработки стратегическихи годовых программ управления имущественным комплексом, а также кор-ректировки текущего плана.
Внедрение любой системы управления имущественным комплексом неустранит полностью появление дефектов и отказов. Для учета дефектов, отка-зов и аварий в модели системы управления имущественным комплексом пре-дусмотрен одноименный процесс. С другой стороны, данные этого процесса,
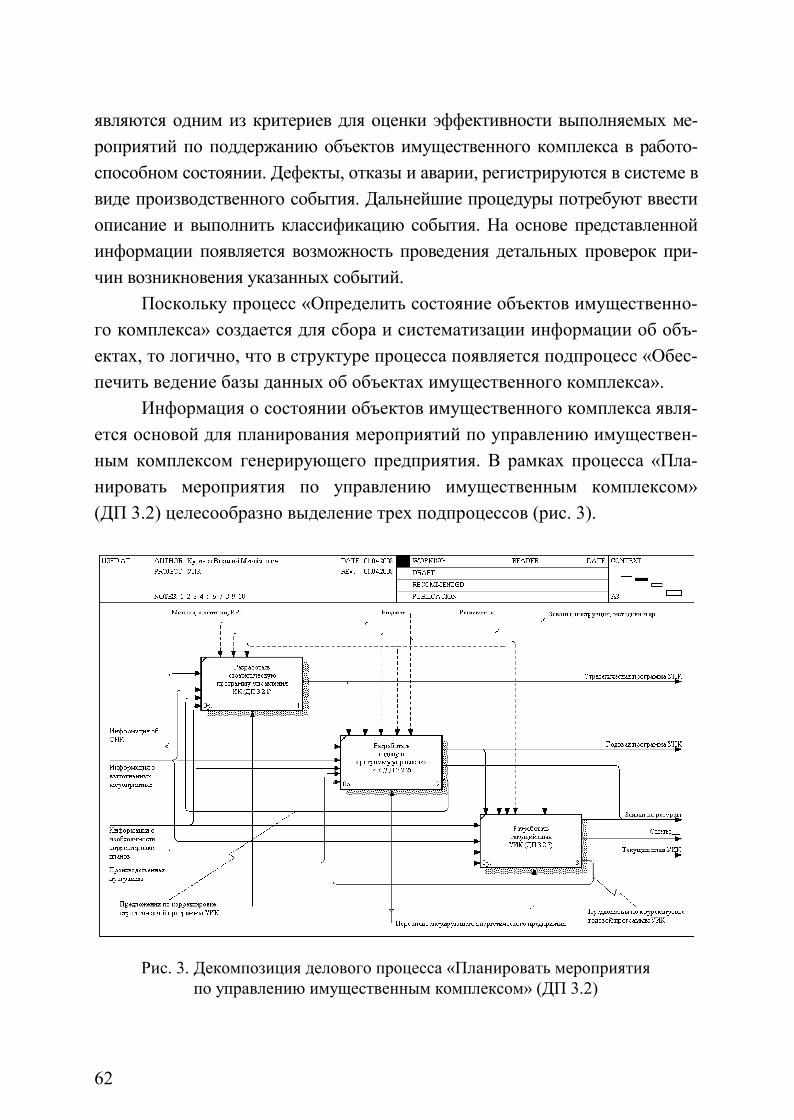
62
являются одним из критериев для оценки эффективности выполняемых ме-роприятий по поддержанию объектов имущественного комплекса в работо-способном состоянии. Дефекты, отказы и аварии, регистрируются в системе ввиде производственного события. Дальнейшие процедуры потребуют ввестиописание и выполнить классификацию события. На основе представленнойинформации появляется возможность проведения детальных проверок при-чин возникновения указанных событий.
Поскольку процесс «Определить состояние объектов имущественно-го комплекса» создается для сбора и систематизации информации об объ-ектах, то логично, что в структуре процесса появляется подпроцесс «Обес-печить ведение базы данных об объектах имущественного комплекса».
Информация о состоянии объектов имущественного комплекса явля-ется основой для планирования мероприятий по управлению имуществен-ным комплексом генерирующего предприятия. В рамках процесса «Пла-нировать мероприятия по управлению имущественным комплексом»(ДП 3.2) целесообразно выделение трех подпроцессов (рис. 3).
Рис. 3. Декомпозиция делового процесса «Планировать мероприятияпо управлению имущественным комплексом» (ДП 3.2)

63
Основными выходами рассматриваемого делового процесса являют-ся подготовленные стратегическая и годовая программа управления иму-щественным комплексом генерирующего предприятия, которые согласо-ваны со стратегией развития предприятия, с бизнес-планами и бюджетамина предстоящий период, а также текущий план мероприятия, сметы и за-явки на все виды ресурсов, необходимых для реализации указанных меро-приятий.
Литература:
1. Верников Г. Основные методологии обследования организаций.Стандарт IDEF0 // Электронный ресурс. Режим доступа: http://www.cfin.ru/
2. Китушин В. Г. Основы теории управления: Конспект лекций. –Новосибирск: Изд-во НГТУ, 1996.
3. Рубцов С. Опыт использования стандарта IDEF0 при проектиро-вании процессов // Открытые системы.-2003.-№ 1.-С. 53-56.
РАЗРАБОТКА МЕТОДИКИ ИЗМЕРЕНИЯЭЛЕКТРОМАГНИТНЫХ ПАРАМЕТРОВ ТРАНСФОРМАТОРОВ
ИНВЕРТОРНЫХ ИСТОЧНИКОВ ПИТАНИЯ МАШИНКОНТАКТНОЙ СВАРКИ
Лихачев Д. И.Санкт-Петербургский государственный
политехнический университет
Согласно общепринятой методике, для получения информации обактивном сопротивлении и индуктивности рассеяния трансформатора ма-шины контактной сварки (МКС), проводят опыт короткого замыкания(КЗ) [1]. При проведении опыта КЗ для трансформатора МКС с инвертор-ным источником питания (ИИП), необходимо иметь возможность регули-ровать не только величину нормального напряжения короткого замыка-ния, но и частоту подводимого к первичной обмотке напряжения в диапа-зоне от 50 до 10000 Гц. Для измерений в опыте КЗ требуются амперметр,вольтметр и ваттметр, которые могли бы работать на высокой, до 10 кГц,частоте. Как показали проведенные опыты, обычные лабораторные

64
приборы, сконструированные для промышленной частоты 50 Гц не спо-собны гарантировать достоверные результаты измерений при частоте вы-ше 500 Гц.
Получается, что для измерения электромагнитных параметровтрансформаторов ИИП МКС на различной частоте, по общепринятой ме-тодике, необходимо установить исследуемый трансформатор в МКС с ин-верторным источником питания и компьютерной системой управления.Для регулирования нормального напряжения короткого замыкания требу-ется рассчитанный на токи в сотни ампер автотрансформатор, а непосред-ственно для измерений – аттестованный регистратор сварочных процес-сов. Стоимость создания такого испытательного стенда достигает не-скольких миллионов рублей, при этом стенд не может быть мобильным ине позволяет оперативно проводить регулярные измерения во всем инте-ресующем диапазоне частот от 50 до 10000 Гц.
С целью обеспечения возможности получения частотных зависимо-стей активных сопротивлений и индуктивностей рассеяния, необходимыхдля анализа и разработки трансформаторов ИИП МКС, была предложенановая методика измерений. Методика основана на использовании микро-омметра М4104 компании «БРИС» и измерителя иммитансаЕ7-20 ОАО «МНИПИ». Методика заключается в следующем:
1. Микроомметром измеряют сопротивления первичной и вторичнойобмоток исследуемых сварочных трансформаторов постоянному току;
2. Измеритель иммитанса подключают непосредственно к выводамобмоток исследуемых трансформаторов и, плавно регулируя частоту вдиапазоне от 25 Гц до 1 МГц, измеряют активное сопротивление и индук-тивность рассеяния при переменном токе.
На основе первых измерений рассчитывают условное активное со-противление трансформатора постоянному току, приведённое к первичнойобмотке: 02
201012 RkRR ТР . По вторым измерениям рассчитывают отно-
сительные сопротивления катушек jR и
jR . Параметр jR позволяет оце-
нить величину добавочных потерь в катушке. Параметр jR позволяет ис-
следовать зависимость активного сопротивления катушки с заданнымизначениями ω, μ, γ от её толщины b.

65
Предложенная методика была испытана при измерениях различныхтрансформаторов как промышленной, так и звуковой частоты и сопостав-лена с результатами измерений по общепринятой методике. Расхождениепри промышленной частоте составило не более 1 %, а на частоте до 10 кГц– не более 10 %. Источником более высокой погрешности в последнемслучае служит организация проведения испытаний трансформаторовИИП МКС по общепринятой методике.
Использование описанной методики обеспечило возможность про-ведения анализа существующих конструкций трансформаторов ИИП МКСи способствовало созданию новых конструкций, электропотребление, мас-са и габариты которых были значительно снижены.
Литература:
1. Рыськова З. А, Федоров П. Д, Жимерева В. И. Трансформаторыдля электрической контактной сварки / З. А. Рыськова и др.; - Л:Энергоатомиздат. Ленинградское отделение, 1990. – 424 с.: ил.; -ISBN 5-283-04427-0.
ВЛИЯНИЕ ЖЕСТКОСТИ ПОДШИПНИКОВОГО УЗЛАНА РАСПРЕДЕЛЕНИЕ НАГРУЗКИ МЕЖДУ ТЕЛАМИ КАЧЕНИЯ
Лукин И. П., Карапетян Д. Э., Шемякин Э. В.Санкт-Петербургский государственный
технологический университет растительных полимеров
Во всех машинах и механизмах широко используется большое коли-чество различных подшипников качения. Они являются основными эле-ментами, определяющими качественные характеристики узлов, а такжедолговечность и надежность машин в целом. К подшипникам каченияпредъявляются требования высокой надежности в работе, большой долго-вечности и динамической грузоподъемности. Совершенствование сущест-вующих образцов и разработка новой современной техники предъявляют кподшипникам качения повышенные требования по конструктивномуоформлению и техническим параметрам. Эти требования вытекают из не-обходимости создания узлов с минимальной массой, с улучшенными
66
условиями смазывания и охлаждения подшипников, с повышенными гру-зоподъемностью, быстроходностью и температуростойкостью.
Как известно, основная причина потери работоспособности под-шипников качения - усталостное разрушение его деталей [1, 2].
Одной из основных проблем, с которой сталкиваются при эксплуа-тации подшипников качения, является их небольшой срок службы из-заочень большой неравномерности распределения нагрузки между теламикачения. Основная нагрузка приходится на центральное тело качения, ле-жащее на линии действия внешней нагрузки, а остальные тела качения по-лучают незначительное нагружение [3, 4]. От распределения нагрузки потелам качения зависят контактные напряжения, упругие деформации, же-сткость, а также точность вращения оси подшипника.
Важнейшими факторами, влияющими на распределение нагрузкимежду телами качения, являются упругие деформации контактирующихтел, радиальные зазоры и натяги между ними, а также жесткость колец икорпуса подшипника.
Во всех существующих методиках расчета подшипников заложенысущественные допущения, которые значительно упрощают расчет, но при-водят к неправильным результатам. В данных методиках, как правило, неучитывается жесткость колец и корпуса подшипника, что очень сильноискажает реальное распределение нагрузки между телами качения.
Чтобы понять, существенно ли влияет изгиб колец на распределениенагрузки между телами качения, был проведен эксперимент, описание ко-торого приведено ниже.
Была спроектирована объемная модель подшипника, включающаяцапфу вала, кольца с 15 телами качения и корпус, и проведен её расчет вобъемном состоянии методом конечных элементов. Учитывались переме-щения и деформации всех деталей подшипника. Внутреннее кольцо поса-жено на цапфу вала с натягом, а между телами качения и кольцами, на-ружным кольцом и корпусом задан зазор, как в реальном подшипнике. Всилу симметрии рассматривалась одна половина подшипника.
На рис. 1 изображена гистограмма влияния толщины корпуса нараспределение нагрузки между телами качения подшипника при внешнейнагрузке, равной 12,6 кН.

67
Рис. 1. Распределение нагрузки по телам каченияв зависимости от толщины корпуса
Из графиков видно, что при небольших толщинах корпуса подшип-ника распределение нагрузки по телам качения очень неравномерное. Бо-лее того, около половины от внешней нагрузки воспринимает тело каче-ния, лежащее на линии действия вектора нагрузки, что неблагоприятносказывается на работе подшипника и его долговечности. При увеличениитолщины корпуса распределение нагрузки становится более равномерным,что можно наблюдать при толщине корпуса 40 мм. Здесь уже некоторуючасть нагрузки начинают воспринимать и соседние тела качения, тем са-мым происходит благоприятное перераспределение нагрузки. Но всё жекартина распределения нагрузки остается далекой от оптимальной. Даже8-кратное увеличение толщины корпуса подшипника не дает требуемогораспределения нагрузки [3].
Таким образом, данным примером показано, что жесткость подшип-никового узла играет значительную роль в распределении нагрузки по те-лам качения, а, следовательно, и в долговечности всего подшипника.
В ходе дальнейших разработок по данной проблеме было создано изапатентовано изобретение, позволяющее создавать необходимые распре-деления нагрузки [5].
Между корпусом подшипника и наружным кольцом устанавливаетсякольцо переменной жесткости, которое создает оптимальное

68
распределение нагрузки между телами качения и повышает долговечность,как самого подшипникового узла, так и оборудования.
Данное исследование проводилось также для радиального подшип-ника с 15-ю телами качения, при толщине корпуса 10 мм, внешней нагруз-ки, равной 12,6 кН. Результаты представлены на рис. 2.
Рис. 2. Сравнительная диаграмма распределения нагрузкиобычного подшипникового узла и узла с профилированным кольцом
переменной жесткости (показана только правая половина подшипника)
Как видно из данной диаграммы, при использовании профилирован-ного кольца возникает возможность перераспределения нагрузки междутелами качения таким образом, чтобы замедлить действие усталостногоразрушения – главного критерия долговечности подшипников.
Из выше сказанного следует, что для увеличения долговечностиподшипника необходимо обеспечить оптимальное распределение нагрузкимежду телами качения.
Литература:
1. Перель Л. Я. Подшипники качения: Расчёт, проектирование и об-служивание опор; справочник. -М,: Машиностроение, 1983,-543 с.
2. Леликов О. П. Валы и опоры с подшипниками качения. Конструи-рование и расчёт: справочник. - М,: Машиностроение, 2006. -640 с.
69
3. Чижик Н. А., Шемякин Э. В., Костина Ю. В. Оптимальное распре-деление нагрузки по телам качения подшипника // Машины и аппаратыЦБП: межвуз. сб. науч. тр. / СПбГТУРП. - СПб., 2008. С. 48 - 54.
4. Чижик Н. А., Шемякин Э. В., Костина Ю. В. Оценка распределе-ния нагрузки по телам качения подшипника с учетом деформации колец //Машины и аппараты ЦБП: межвуз. сб. науч. тр. / СПбГТУРП. - СПб., 2008.С. 42 - 48.
5. Пат. 2386870 РФ, МПК F16C033/58, F16C035/06. Устройство дляповышения долговечности подшипникового узла.
РАЗРАБОТКА МЕТОДИКИ РАСЧЕТАНАСТРОЕК ПАРАМЕТРОВ РАСПРЕДЕЛЕННОГО
ПИД-РЕГУЛЯТОРА ПРИ ОГРАНИЧЕНИИНА КОРНЕВОЙ ПОКАЗАТЕЛЬ ЗАПАСА УСТОЙЧИВОСТИ
Ляшенко А. Л.Санкт-Петербургский государственный
горный университет
На сегодняшний день известны такие направления в решении про-блемы синтеза регуляторов для распределенных систем как аналитическоеконструирование оптимальных регуляторов, частотный метод анализасинтеза, параметрический синтез регуляторов. Остановимся более под-робно на втором направлении.
В настоящие время частотные методы синтеза распределенных регу-ляторов основываются на применение обычных частотных характеристик[3], при этом, как правило, накладываются ограничения на запас устойчи-вости модулю и фазе. В данной статье представлена методика расчета на-строек распределенного высокоточного регулятора с применение расши-ренных частотных характеристик объекта управления, при этом наклады-ваются ограничения на степень колебательности m переходного процесса.
Постановка задачи
Для системы управления распределенным объектом (задана его ма-тематическая модель, либо имеется возможность проводить эксперимен-тальные исследования с реальным объектом) синтезировать

70
распределенный высокоточный регулятор. При этом на запасы устойчиво-сти системы наложены следующие ограничения:
1) запасы по модулю адLL 3 ;2) запасы по фазе ад3 ;
3) степень колебательности задmm Передаточная функция синтезируемого регулятора согласно [4] име-
ет вид:
snn
nEsnn
nEnn
nEsyxW
2
22
22
2
44
44
2
11
11
1111111),,( (1)
где: Е1, Е2, Е4 - коэффициенты усиления;
2
2
2
2
2
22
zyx
;
n1, n2, n4 - весовые коэффициенты.
Анализ объекта управления
Математическая модель имеет вид:
2
2
2
2
2
2 ),,,(),,,(),,,(),,,(z
tzyxQy
tzyxQx
tzyxQat
tzyxQ , (2)
zyx LzLyLx 0,0,0 .
Граничные и начальные условия задаются следующими соотношениями:
0),,,(),,0,( zLxQzxQ y , (3)
0),,,(),,,0(
xzyLQ
xzyQ x ,
),,(),,,( yxUz
zyxQ
, (4)
0),0,,(
zyxQ , (5)
0)0,,,( zyxQ . (6)
71
Математическая модель объекта описывается системой дифферен-циальных уравнений в частных производных. Передаточные функции та-ких объектов управления могут быть представлены в виде совокупностипередаточных функций по каждой пространственной моде [4]. Известно[3], что для тепловых объектов управления передаточные функции по ка-ждой моде входного воздействия могут быть аппроксимированы переда-точными функциями вида:
,1
)( SeST
KSW
( ...2,1 ) (7)
Значения параметров ,, TK определяется по результатам
численного моделирования.Для этого на вход системы подадим входное воздействие вида:
)()()(),,( , уSinxSinsCsyx (8)
где
jeС , ;
lx
;
lr
.
При определении указанных параметров для =1,3 учитывались ди-намические свойства процесса распространения теплового поля внутриобъекта.
По результатам численного моделирования определим значения па-раметров ,, TK .
Для частотного анализа объекта положим в (7)
)( mjp
(где - круговая частота, m - степень колебательности) и определим мо-дуль M и фазу [1], [2]:
m
nn
n eTmT
kmM
222)1(
),( (9)
n
n
TmTarctgm 1
2),( (10)

72
По результатам вычислений строим расширенные частотныехарактеристики.
Процедура синтеза
Положим, что фазовый сдвиг, вносимый в систему регулятором ра-вен нулю. Тогда для определения частот среза модуля разомкнутой систе-мы получим следующие выражение:
),,,( jmW , (11)
где: ),,,( jmW - комплексный передаточный коэффициент объектауправления, определенный численным способом.Подставляя значение T , и 6/ в (11), определим значение час-
тот среза модуля. Подставляя 31, в выражение:
)(lg)(lg5.0lg 24 GKGK .
Получим систему уравнений:
2
1
2
22
4
1
4
441
1lg5.0
1lg5.0lg
nG
nn
EnG
nn
E (12)
2
3
2
22
4
3
4
443
1lg5.0
1lg5.0lg
nG
nn
EnG
nn
E (13)
Вычитаем (12) из (13) придем к следующему результату:
12
32
14
342
11
lg11
lglgGnGn
GnGn
(14)
Используя (14), определим значение 42 , nn . Так как 12 , то поло-
жим в (12) 2n . Тогда 4n определяется соотношением:
11
21
23
2
4
GGn (15)
73
гдеLl YX
G 11111
,Ll YX
G 33333
.
Рассматривая совместно уравнение
2
1
2
22
4
1
4
441
1lg5.0
1lg5.0lg
nG
nn
EnG
nn
E (16)
и уравнения:
)(lglg,)(
1lglg 14212
1 GKGK
,
получим: 24 , EE .
Введем параметр 1G , выбор значения которого связан с возмож-ностью компенсации параметрических возмущений объекта управления.
12141 5050 GKlg.GKlg.Glg . (17)
Для этого к уравнению (17) допишем уравнение, связывающее пара-метры 14 GK и 12 GK с параметром 1G .
Уравнение связи может быть представлено в виде:
211 lglgG , (18)
1412
11 GKlgGK
lgG
.
Из полученной системы уравнений (18), найдем E2 и E4:
Подставляя значения 31, в уравнение:
m
nn
n eTmT
kmM
222)1(
),(
определим значение модуля: 31 , MM .
Так как 31, , являются частотами среза модуля разомк-нутой системы, то коэффициенты усиления регулятора в этих точках рав-ны:
74
133
111 )(,)( MMMM
Определим параметры 11, En .
1
1
1
111
1nG
nnEM (19)
1
3
1
113
1nG
nn
EM (20)
Поделив (19) на (20), придем к следующему результату:
11 31
1
M
GGMMn .
Подставляя значения 111 ,, GMn в (19) получим 1E .
Произведя расчеты параметров регулятора, по выше изложенной ме-тодике запишем передаточную функцию распределенного высокоточногорегулятора:
ss
syxW
22
2
01664.31189.15707
1189.15707
1189.15707085964.0
246.2461
245.2461245.24699197.5),,(
После преобразования получим:
s
s
syxW
22
2
01664.31000063.0999936.0085964.0
00406.0995939.099197.5),,( (21)
С помощью разработанной методики были рассчитаны распределен-ные высокоточные регуляторы для различных объектов управления. Ре-зультаты моделирования замкнутых систем управления свидетельствуют оположительном качестве управления в полном соответствии с предъяв-ляемыми к системам требованиям. Из этого можно сделать вывод, что раз-работанная методика позволяет рассчитывать настройки распределенного

75
регулятора, реализующего пропорционально – интегрально-дифференциальный закон управления, по заданному значению степениколебательности а, следовательно, и требуемой степенью затухания пере-ходного процесса.
Литература:
1. Дудников Е. Г. Основы автоматического регулирования тепловыхпроцессов. Учебное пособие для вузов. `М., Л.` Госэнергоиздат. 1956 г.264 с.
2. Лазарева Т. Я., Мартемьянов Ю. Ф. Основы теории автоматиче-ского управления: Учебное пособие. Тамбов: Изд-во Тамб. гос. техн. ун-та,2003. 308 с.
3. Першин И. М. Анализ и синтез систем с распределенными пара-метрами. – Пятигорск, РИА на КМВ. 2007. – 244с.
4. Рапопорт Э. Я. Структурное моделирование объектов и системуправления с распределёнными параметрами. – М.: Высшая школа, 2003. –299 с.
РАЗРАБОТКА НОМОГРАММ ДЛЯ РАСЧЕТА НАСТРОЕКРАСПРЕДЕЛЕННОГО ПИД-РЕГУЛЯТОРА
Ляшенко А. Л.Санкт-Петербургский государственный
горный университет
В настоящие время номографические методы занимают достаточнобольшое место в практике инженерно-технических расчетов. Являясьочень удобным счетным инструментом для вычисления по готовым фор-мулам, номограммы позволяют значительно сократить время расчетов ибыстро решить нужную задачу с достаточной для практики точностью.Основным достоинством номограмм как вычислительного аппарата явля-ется быстрота вычислений по ним.
Достаточно широко номограммы используются для определения на-строек цифровых и аналоговых регуляторов в технических системах, реа-лизующих типовые алгоритмы управления [1]. В отличие от, например,формульного метода, метод расчета по номограммам позволяет более
76
точно определить настройки регулятора, так как учитывает наличие нели-нейной зависимости между параметрами настройки регулятора и величи-ной отношения времени запаздывания и постоянной времени объекта.
Наличие номограмм позволит ускорить и упростить процедуру рас-чета настроек распределенных регуляторов. Существующие номограммыдля расчета настроек сосредоточенных регуляторов не позволяют решитьданную задачу, так как не дают возможности расчета ряда параметров вхо-дящих в состав передаточных функций распределенных регуляторов. Всвязи с этим возникает потребность в разработке принципиально новыхномограмм для систем с распределенными параметрами.
Постановка задачи
Рассмотрим процедуру построения номограмм для системы управ-ления температурным полем объекта, который представлен следующейматематической моделью.
Математическая модель имеет вид:
2
2
2
2
2
2 ),,,(),,,(),,,(),,,(z
tzyxQy
tzyxQx
tzyxQat
tzyxQ , (1)
zyx LzLyLx 0,0,0 .
Граничные и начальные условия задаются следующими соотноше-ниями:
0),,,(),,0,( zLxQzxQ y , (2)
0),,,(),,,0(
xzyLQ
xzyQ x ,
),,(),,,( yxUz
zyxQ
, (3)
0),0,,(
zyxQ , (4)
0)0,,,( zyxQ . (5)

77
Произведем построение монограммы для синтеза распределенногоПИД-регулятора, входящего в состав системы управления температурнымполем объекта, структурная схема, которой изображена на рис. 1.
Рис. 1. Структурная схема системы управления
Передаточная функция синтезируемого регулятора имеет вид [2]:
рnn
nE
рnnn
Enn
nEрyxW
2
22
22
2
44
44
2
11
11
1111111),,( (6)
где: Е1, Е4, Е2 - коэффициенты усиления;2 - лапласиан;
421 ,, nnn - весовые коэффициенты.
Разработка монограмм
Математическая модель объекта описывается системой дифферен-циальных уравнений в частных производных. Передаточные функции та-ких объектов управления могут быть представлены в виде совокупностипередаточных функций по каждой пространственной моде. Известно [3],что для тепловых объектов управления передаточные функции по каждоймоде входного воздействия могут быть аппроксимированы передаточны-ми функциями вида:
,1
)( рeрT
KрW
( ...2,1 ) (7)
Значения параметров ,, TK определяется по результатам
численного моделирования.Для этого на вход системы подадим входное воздействие вида:
)()()(),,( , уSinxSinsCрyxU (8)
78
где qС , ;lx
;lr
.
В соответствии с выражением (8) было сформировано распределен-
ное входное воздействие для 1,1 и 3,3 по методике, пред-
ставленной в [2]. По результатам численного моделирования определимзначения параметров ,, TK для 1000 контрольных точек принад-
лежащих объекту. Для контрольной точки № 1 результаты представлены втабл. 1.
Таблица 1Выходные значения в контрольной точке №1
Параметры К Т 11 0,284 1427 271
33 0,214 1415 270
Используя полученные результаты, произведем расчет настроек рас-пределенного ПИД – регулятора с применением методики представленнойв [2] для каждой контрольной точки.
Для контрольной точки № 1, параметры которой приведены в табл. 1передаточная функция распределенного ПИД-регулятора (6) примет сле-дующий вид:
рр
рyxW
22
2
011271168020
1168020
11680200076.0
65.13951
65.1395165.139591549.10),,(
(9)
Аналогично произведем расчеты для всех контрольных точек. Ис-пользуя полученные данные, произведем расчеты следующих параметров:
ТТс - относительное время запаздывания; (10)
КЕК с 1 - общий коэффициент передачи системы; (11)
4ЕVс - относительное время изодрома; (12)
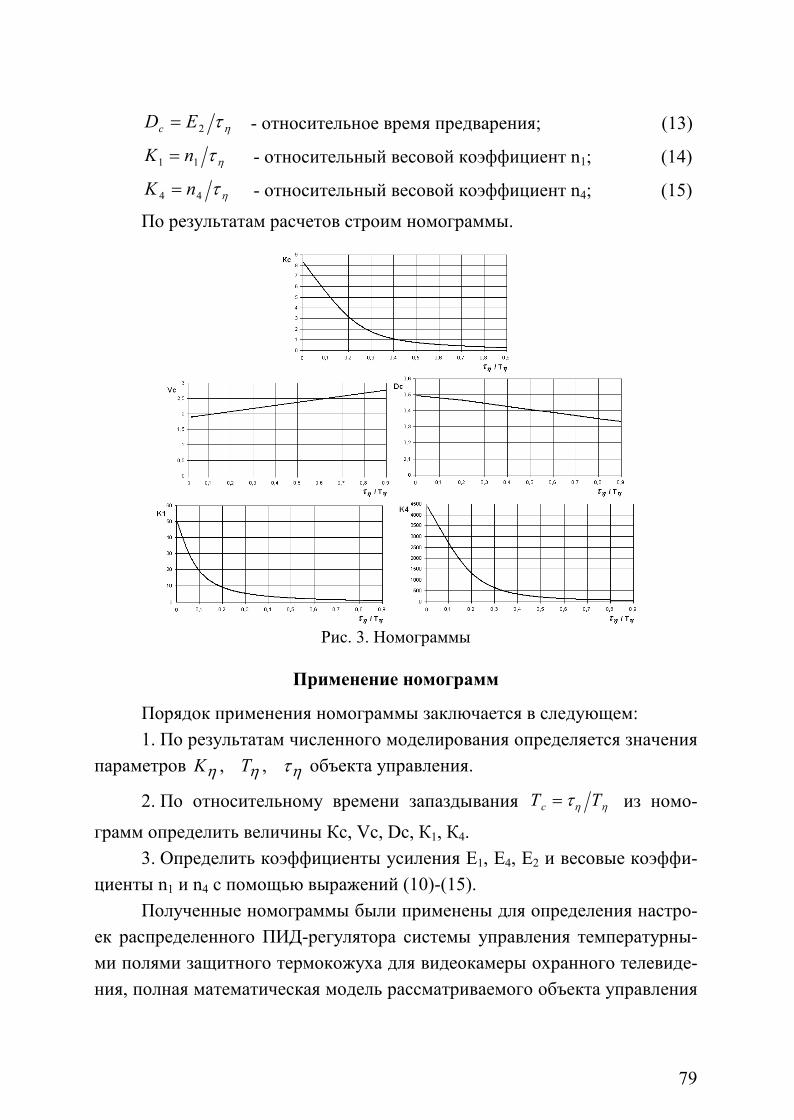
79
2ЕDс - относительное время предварения; (13)
11 nK - относительный весовой коэффициент n1; (14)
44 nK - относительный весовой коэффициент n4; (15)
По результатам расчетов строим номограммы.
Рис. 3. Номограммы
Применение номограмм
Порядок применения номограммы заключается в следующем:1. По результатам численного моделирования определяется значения
параметров ,, TK объекта управления.
2. По относительному времени запаздывания ТТс из номо-
грамм определить величины Кс, Vc, Dc, К1, К4.3. Определить коэффициенты усиления Е1, Е4, Е2 и весовые коэффи-
циенты n1 и n4 с помощью выражений (10)-(15).Полученные номограммы были применены для определения настро-
ек распределенного ПИД-регулятора системы управления температурны-ми полями защитного термокожуха для видеокамеры охранного телевиде-ния, полная математическая модель рассматриваемого объекта управления
80
представлена в [4]. Как показали результаты синтеза, настройки распреде-ленного регулятора совпадают с настройками, рассчитанными с помощьюметодики представленной в [2].
На основании изложенного можно сделать вывод, что полученныеномограммы могут быть использованы для определения настроек распре-деленных ПИД – регуляторов, входящих в состав систем с распределен-ными параметрами заданной структуры.
Литература:
1. Черныш П. И. Локальные системы управления. Часть 1. Регулято-ры: Учебное пособие / П. И. Черныш, ТРТУ, Таганрог. 1993. – 117 с.
2. Першин И. М. Анализ и синтез систем с распределенными пара-метрами / И. М. Першин. – Пятигорск: Изд-во РИА на КМВ, 2007. – 244 с.
3. Рапопорт Э. Я. Структурное моделирование объектов и системуправления с распределёнными параметрами / Э. Я. Рапопорт. – М.: Выс-шая школа, 2003. – 299 с.
4. Ляшенко А. Л. Математическое моделирование распределённогообъекта управления с подвижным источником воздействия / А. Л. Ляшенко,О. И. Золотов // Научно-технические ведомости СПБГПУ. Серия «Информа-тика. Телекоммуникации. Управление» – 2011.- № 1(115). – С. 113-117.
ИССЛЕДОВАНИЕ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВОТПЕЧАТКОВ АБРАЗИВНЫХ ЗЁРЕН ПРИ ШЛИФОВАНИИ
Мальцев П. Н., Никифоров И. П.Псковский государственный университет
Ключевым показателем, влияющим на производительность операциишлифования, является объём металла (стружки), снятого единичным зер-ном. Как было показано в работе [1] абразивное зерно может быть адек-ватно смоделировано гиперболоидом вращения. В работе [2] предложенаформула для нахождения объёма металла, срезанного зерном гиперболи-ческой формы с учетом процессов пластической деформации. Однакопредложенная математическая модель рассматривает случай, когда осьсимметрии гиперболоида (модели зерна) лежит в главной секущейплоскости.
81
Для установления влияния отклонения оси симметрии зерна от следаглавной секущей плоскости на площадь среза был проведён эксперимент:пять призматических ориентировано расположенных заготовок обрабаты-вались за один проход. Эксперимент проводился на плоскошлифовальномстанке 3Г71М тремя шлифовальными кругами 1 250 х 20 х 76 WА F30 L6V50 2 разной зернистости: F30, F40, F60.
После обработки детали торцевой поверхностью устанавливались настолик металлографического инвертированного микроскопаAxiovert 40 MAT с цифровой камерой, где обработанная поверхность рас-сматривалась в профиль с увеличением × 1000. По полученным снимкам бы-ли измерены наиболее глубокие царапины (риски), которые образуются из-заразновысотности расположения абразивных зёрен. Большая глубина рисокпозволяет более точно оценить её реальную геометрическую фигуру.
По результатам анализа снимков видно, что профиль отпечатка зер-на представляет собой фигуру, сильно отличающуюся от сферы, конуса(пирамиды), усечённого конуса (усечённой пирамиды), эллипсоида и па-раболоида. Наиболее близкими фигурами являются округлённый конус игиперболоид, однако последний более предпочтителен, ввиду наличия из-меняющегося на каждом отпечатке радиуса округления.
Адекватность полученных результатов подкрепляется тем, что мак-симальная глубина внедрения зерна не превышает половины его макси-мального размера для каждого типа зернистости, а среднее значение углапри вершине увеличивается пропорционально размеру зерна.
Кроме того, был отмечено наличие отклонения угла оси симметриизерна в основной плоскости от следа главной секущей плоскости. Наклонабразивного зерна увеличивает площадь его контакта с заготовкой, что не-посредственно влияет на величину снятого металла.
Влияния зернистости абразивного материала на угол отклонения осисимметрии зерна обнаружено не было.
Средняя величина угла отклонения оси симметрии зерна от следаглавной секущей плоскости составила 44,5 °. Ввиду этого изменениеплощади отпечатка, зависящее от данного угла, для электрокорундовыхкругов средней зернистости может быть определено следующим образом:

82
0319,1001,0
03180
44,5
0
SeSeSS
, (1)
где 0S – площадь гиперболы, ограниченной прямой, параллельной поверх-ности заготовки.
Выводы:1) Анализ отпечатков даёт более реальную картину резания металла,
чем анализ абразивных зёрен.2) Гиперболоид вращения уместно использовать в качестве модели
абразивного зерна.3) Полученную в работе [2] формулу для нахождения объёма метал-
ла, срезанного единичным зерном необходимо откорректировать с учётомреального расположения зерна (в рассматриваемом случае – объём струж-ки помножить на коэффициент равный 1,0319).
Литература:
1. Никифоров И. П. Анализ моделей абразивных зёрен / И. П. Ники-форов, П. Н. Мальцев, Е. Н. Иванов // Труды Псковского политехническо-го института. – Машиностроение. Электротехника. 2011, № 14.3. –С. 300–303.
2. Никифоров И. П. Определение объёма металла, снимаемого еди-ничным абразивным зерном при плоском шлифовании / И. П. Никифоров,В. К. Кошмак, Н. Ф. Кудрявцева // Труды ППИ. – Машиностроение. Элек-тропривод. 2008, № 11.3. – С. 218–222.
МОДЕЛИРОВАНИЕ РЕЖИМОВ РАБОТЫСИСТЕМЫ ВОЗБУЖДЕНИЯ СИНХРОННЫХ ДВИГАТЕЛЕЙ
ПРИ ПРОВАЛАХ НАПРЯЖЕНИЯ
Марфин В. В., Федотов А. И.Казанский государственный энергетический университет
Под воздействием провалов напряжения, возникающих в системевнутреннего электроснабжения промышленного предприятия вследствиекоротких замыканий (КЗ) во внешней питающей сети, изменяется режимработы высоковольтных синхронных двигателей (СД). Причем

83
возмущение проходит как по цепи обмотки статора, так и по цепи обмоткиротора. Последнее обусловлено проявлением провала напряжения и настороне 0,4 кВ системы электроснабжения. Наличие электрических связеймежду подстанциями энергосистемы приводит при внешних КЗ к одно-временному снижению напряжения на каждой секции 6-10 кВ главной по-низительной подстанции промышленного предприятия. В результате ав-томатическое включение резерва (АВР) на стороне 0,4 кВ, обычно преду-сматриваемое для резервирования питания цепей возбуждения СД, недействует.
Для расчетов условий успешной ресинхронизации СД после отклю-чения КЗ необходимо адекватно воспроизводить на математических моде-лях работу системы возбуждения, когда вентильные преобразователи на-ходятся под воздействием переходного напряжения, содержащего аперио-дическую составляющую. Учитывая появление на промышленных пред-приятиях и в системе собственных нужд электростанций устройств быст-родействующего АВР, обеспечивающих коммутацию силового оборудо-вания в пределах одного – двух периодов промышленной частоты, нельзяпренебрегать влиянием электромагнитного переходного процесса со сто-роны питания на работу системы возбуждения СД.
На предприятиях нефтехимических отраслей промышленности ши-роко применяются мощные СД с бесщеточной системой возбуждения.Особенностью математического моделирования СД с бесщеточной систе-мой возбуждения является необходимость адекватного отображения одно-временной работы двух преобразователей, обусловливающих переменнуюструктуру дифференциальных уравнений. Переход к эквивалентным урав-нениям позволяет снять эту проблему. Промежуточный переход к дис-кретным переменным в область локальных изображений для каждого пре-образователя с последующим возвратом к дифференциальным уравнениямпостоянной структуры обеспечивает математическое описание работы СДотносительно «полезных» составляющих в токах возбуждения.
Пусть напряжение питания обмотки возбуждения возбудителя изме-няется по следующему закону:
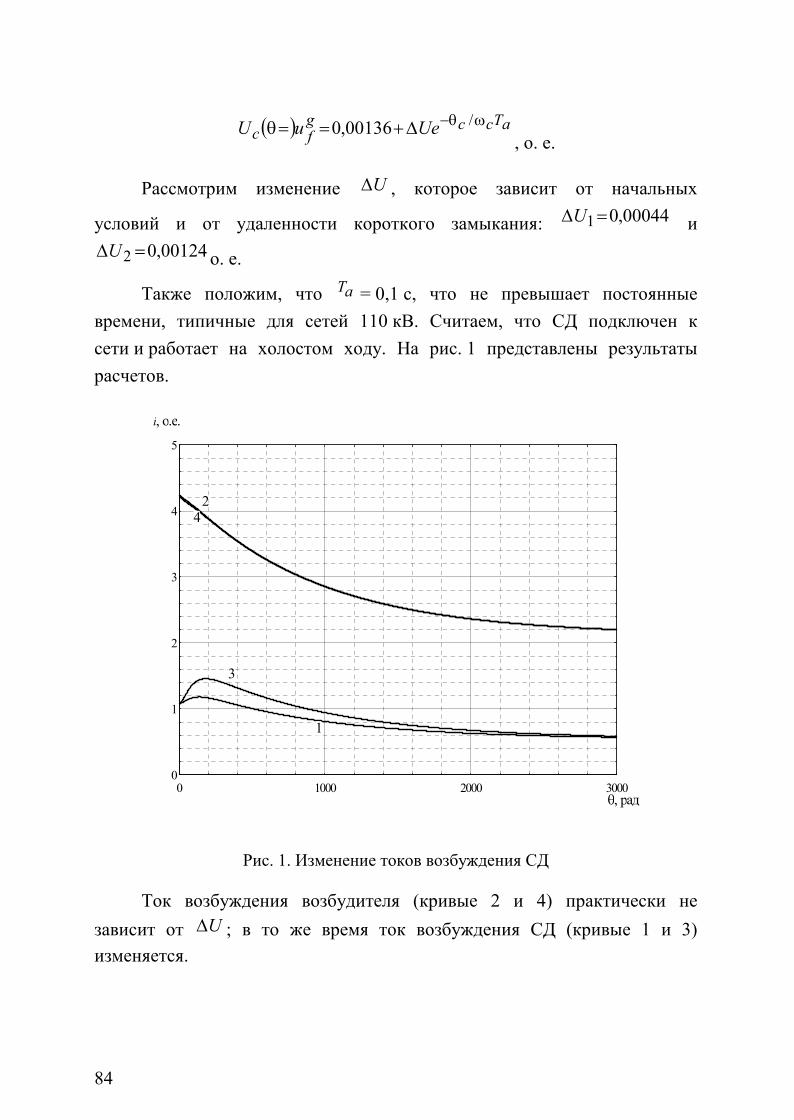
84
aTccgfc UeuU /00136,0
, о. е.
Рассмотрим изменение U , которое зависит от начальных
условий и от удаленности короткого замыкания: 00044,01U и00124,02 U о. е.
Также положим, что aT = 0,1 с, что не превышает постоянныевремени, типичные для сетей 110 кВ. Считаем, что СД подключен ксети и работает на холостом ходу. На рис. 1 представлены результатырасчетов.
0
1
2
3
4
5
0 1000 2000 3000, рад
i, o.e.
3
1
42
Рис. 1. Изменение токов возбуждения СД
Ток возбуждения возбудителя (кривые 2 и 4) практически независит от U ; в то же время ток возбуждения СД (кривые 1 и 3)изменяется.
85
УСТОЙЧИВОСТЬ РАБОТЫ СИНХРОННОЙ МАШИНЫВ ЭНЕРГОСИСТЕМЕ
Марфина Н. Н., Федотов А. И.Казанский государственный энергетический университет
Одной из важнейших задач электроэнергетики является устойчиваяработа электрических станций и энергосистем. Нарушения устойчивостиих работы приводит к отключениям потребителей электроэнергией, по-этому анализ режимов и устойчивости режимов электрических станций исистем является важнейшей задачей. Устойчивость работы электрическихстанций как научная дисциплина опирается на общую теорию устойчиво-сти движения, изучающая влияние возмущающих факторов на движениелюбой материальной системы. В энергосистеме такими параметрами дви-жения являются мощности генераторов и нагрузки, токи, напряжение, час-тота вращения ротора электрических машин, взаимные углы между одно-именными осями ротора.
При работе синхронного генератора на сеть переменного тока могутвозникнуть возмущения нормального режима работы из-за спонтанныхизменения параметров режима. Переходный процесс может развиватьсяпо-разному: либо он заканчиваться новым установившимся режимом нор-мальной работы, либо новый нормальный режим становится невозмож-ным. В синхронной машине различают два вида устойчивости: статиче-скую (устойчивость в малом) и динамическую (устойчивость в большом).Более общим является определение динамической устойчивости, так какона имеет дело с конечными возмущениями (внезапное короткое замыка-ние в системе, внезапный наброс нагрузки и др.). Чаще всего конечныевозмущения не остаются неизменными в течение переходного процесса(короткое замыкание с последующим его быстрым отключением).
Анализ дифференциальных уравнений синхронной машины показы-вает, что метод синхронизирующего и демпферного моментов для оценкистатической устойчивости применим не всегда, а только тогда, когда ма-шина подключена к сети бесконечной мощности и регулирование не при-водит к повышению порядка характеристического уравнения по сравне-нию со случаем нерегулируемой синхронной машиной.

86
АВТОМАТИЗАЦИЯ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВНА ОСНОВЕ ПОЛУСДВИГОВОЙ ТЕОРИИ
ДЛЯ ТОНКОСТЕННЫХ КОНЕЧНЫХ ЭЛЕМЕНТОВ
Морозов С. А. Рыбаков В. А.Санкт-Петербургский государственный
политехнический университет
Известно, что стандартные теории расчета неприменимы для легкихстальных металлических конструкций (ЛСТК), а аналитический подходочень трудоемкий. В связи с выше сказанным возникла необходимость ис-пользовать численные методы в расчётах для ЛСТК.
В работе [1] представлены общие положения использования методаконечных элементов (МКЭ) для расчёта ЛСТК. А в статье [3] проведёнанализ использования различных конечных элементов, из которого видно,что метод квадратичной аппроксимации базисных функций наиболее под-ходит для практических расчетов на прочность тонкостенных конструкцийи имеет оптимальное соотношение между скоростью сходимости и про-стотой реализации. Построенные конечные элементы являются универ-сальными в применении при расчетах как тонкостенных стержней откры-того, так и закрытого профиля.
Для реализации МКЭ была использована программа Maple 11.02. Воснове расчёта лежит использование 7-ми степеней свободы (3 отвечаютза перемещение, 3 – за поворот узла как жёсткого тела, 7-ая - за деплана-цию сечения) для каждого узла. В программе использована стандартнаяматрица жесткости, но элементы, отвечающие за поворот стержня вокругсвоей оси и депланацию, определяются по формулам из работы [2].
Основные этапы МКЭ в форме метода перемещений состоят в сле-дующем:
1. Задание исходной информации, которая включает в себя:- расположение узловых точек в общей системе координат;- взаимное расположение конечных элементов;- значение геометрических и жесткостных параметров каждого из
элементов конструкции;- данные о внешних нагрузках.

87
2. Определение положения узловых точек элементов и составлениематрицы жесткости в местной системе координат.
3. Вычисление направляющих косинусов для каждого элемента и мат-рицы преобразования перемещений из местной системы координат в общую.
4. Вычисление матрицы жесткости i-ого конечного элемента в об-щей системе координат с использованием современных теорий расчёта.
5. Составление матрицы индексов и вычисление матрицы жесткостивсей конструкции [5].
6. Наложение на конструкцию определённого числа связей, исклю-чающих её перемещение как абсолютно жёсткого тела. Получение урезан-ной матрицы жесткости.
7. Вычисление нагрузки на i-конечный элемент в местной системекоординат
8. Вычисление нагрузки на i-конечный элемент в общей системе ко-ординат
9. Составление вектора нагрузок на конструкцию10. Решение системы линейных уравнений
Выводы:
1. Реализован расчёт ЛСТК методом конечных элементов по полу-сдвиговой теории. Применен метод квадратичной аппроксимации базис-ных функций для расчёта угла закручивания и меры депланации.
2. Создан новый программный комплекс для расчёта ЛСТК по полу-сдвиговой теории.
Литература:
1. Рыбаков В. А. Основы строительной механики легких стальныхтонкостенных конструкций: учеб. пособие / В. А. Рыбаков – СПб.: Изд-воСПбГТУ, 2010. – 185 с.
2. Рыбаков В. А., Лалин В. В., Конечные элементы для расчёта огра-ждающих конструкций из тонкостенных профилей // Инженерно строи-тельный журнал. - 2011- № 8. С. 69-80.
3. Лалин В. В., Рыбаков В. А., Морозов С. А. Исследование конеч-ных элементов для расчета тонкостенных стержневых систем // Инженер-но-строительный журнал. 2011. № 1(27). С. 53-73.

88
4. Сливкер В. И. Строительная механика. Вариационные основы.Учебное пособие.- М.: Издательство Ассоциации строительных вузов,2005. - 736 с.
5. Постнов В. А., Хархурим И. Я. Метод конечных элементов в рас-чётах судовых конструкций: СПб Изд. Судостроение 1974 г.
КОМБИНИРОВАННЫЕ ТЕХНОЛОГИИПРИ АБРАЗИВНОЙ ОБРАБОТКЕ
Никифоров И. П., Мальцев П. Н.Псковский государственный университет
В мире намечается тенденция к повышению степени конвергенции(от англ. convergence – схождение в одной точке; не только взаимное влия-ние, но и взаимопроникновение технологий, когда границы между отдель-ными технологиями стираются). Расширяется номенклатура металлоре-жущего оборудования, обеспечивающего комплексную обработку на еди-ном станке сложных деталей посредством ряда совмещенных или после-довательных операций. Более широко применяются многофункциональ-ные станки и обрабатывающие центры, позволяющие совместно осущест-влять фрезерование, шлифование, химическую и электрохимическую об-работку, термообработку с помощью лазеров.
Объединяются возможности одновременной обработки, например, вшлифовальных станках – внутреннее и наружное шлифование; появляетсявозможность обработки различных материалов на одном и том же обору-довании (например, шлифование керамики и закаленных сталей) [1].
Одним из вариантов комбинированных технологий является шлифо-вание с применением гидроабразивной струйной суспензии [2]. При этомзначительно уменьшается время на дополнительную правку шлифовально-го круга, так как абразивные частицы, проникая в поры круга, очищаютего от накопившейся стружки и металлической пыли, что способствуетповышению производительности шлифования.
Применение электроэрозионных технологий алмазно-абразивнойобработки кругами на металлических связках позволяет решить проблемууниверсализации управления шлифованием труднообрабатываемых
89
высокопрочных сталей и сплавов. Проведенные исследования [3] показалиэффективность применения комбинированного электроалмазного методадля обработки твердых сплавов. В результате значительно повышаетсяпроизводительность, уменьшается износ абразивных зёрен, снижается ше-роховатость обработанной поверхности и удельный расход энергии.
По сравнению с традиционными метода обработки электрохимиче-ское шлифование отличается расширенными технологическими возмож-ностями. Данный способ оптимально управляем по съёму припуска, по-зволяет обеспечить 5…6 квалитет при низкой шероховатостиRa = 0,16 мкм и является эффективным для формообразования прецизион-ных поверхностей [4].
Шлифовальный инструмент для профильной алмазно-абразивнойобработки, имеющий необходимую конфигурацию рабочей поверхности,может быть получен из стандартного путём соответствующего профили-рования. Электроэрозионная обработка позволяет получать шлифовальныекруги с одинаковыми свойствами по всей поверхности, в то же время тер-модинамические нагрузки, возникающие при шлифовании на разных уча-стках фасонного профиля, существенно различаются. Это приводит к не-равномерному износу рабочей поверхности круга и к снижению точностиобработки. В работе [5] предлагается профильный круг получать за дветехнологические операции. На первой операции производится предвари-тельное профилирование электроэрозионным методом. Получаемая приэтом конфигурация профиля рабочей поверхности шлифовального кругаотличается от требуемой на величину припуска под последующее накаты-вание роликом. Припуск задается с учётом интенсивности износа алмазно-абразивного инструмента на различных участках фасонного профиля –участкам профиля, имеющим больший износ, соответствует больший при-пуск. На второй операции выполняется окончательное формирование про-филя круга путём пластического деформирования накатным роликом. Принакатывании зёрна утапливаются в связку, а их вершины выстраиваютсяпо линии, эквидистантой профилю ролика. В результате этого достигаетсявысокая точность профилирования.
Для повышения эффективности упрочнения связки профилированиенакатным роликом производят с применением жировых смазок. Введение
90
в смазку поверхностно-активных веществ приводит к проявлению эффектаадсорбционного пластифицирования, который проявляется в понижениипрочности и облегчении деформируемости материала связки. Наибольшийэффект упрочнения материала металлической связки на основе меди иолова происходит при концентрации олеиновой кислоты от 0,1 до 0,5 % ввазелиновом масле. Экспериментальные исследования показали, что нака-тывание роликом обеспечивает снижение износа шлифовального круга всреднем на 20…25 % и делает его более равномерным по профилю. Приэтом уменьшается шероховатость обработанной поверхности.
Подобная технология рассматривается в работе [6]. Но для созданияна алмазном круге плосковершинных зёрен после электроэрозионнойправки предлагается использовать алмазный карандаш. Притупление ре-жущих зёрен обеспечивает равновысотный профиль и существенное сни-жение шероховатости поверхности при круглом наружном шлифовании вусловиях высокопроизводительного съёма относительно больших припус-ков. После электроэрозионной правки шероховатость обработанной по-верхности твердосплавного инструмента составила Ra = 2,2 мкм, а послеэлектроэрозионной правки и правки алмазным карандашом –Ra = 0,1…0,2 мкм. Через 30 мин работы шероховатость изменилась: в пер-вом случае (за счет приработки) уменьшилась до Ra = 1,2 мкм, во второмслучае – увеличилась до Ra = 0,3 мкм. Повторное притупление режущихкромок с помощью алмазного карандаша позволило опять же добитьсяснижения параметра шероховатости Ra до значений 0,1…0,2 мкм.
Стойкость профиля алмазных кругов при электроэрозионном про-филировании и последующем шлифовании изделий из труднообрабаты-ваемых материалов, например, при обработке мелких резьб, сравнительноневысока. Устранить этот недостаток и упрочнить поверхностный слойсвязки позволяет альтернативная технология профилирования, рассмот-ренная в работе [7]. Сначала алмазным кругом (анод) шлифуют последова-тельно два электрода (катоды) – из меди и материала более твердого и из-носостойкого, чем материал связки круга. Шлифование первого электродаобеспечивает высокую производительность, второго – способствует уда-лению слабо закрепленных и чрезмерно выступающих из связки алмазныхзёрен. Третьим этапом является вновь шлифование второго электрода, при
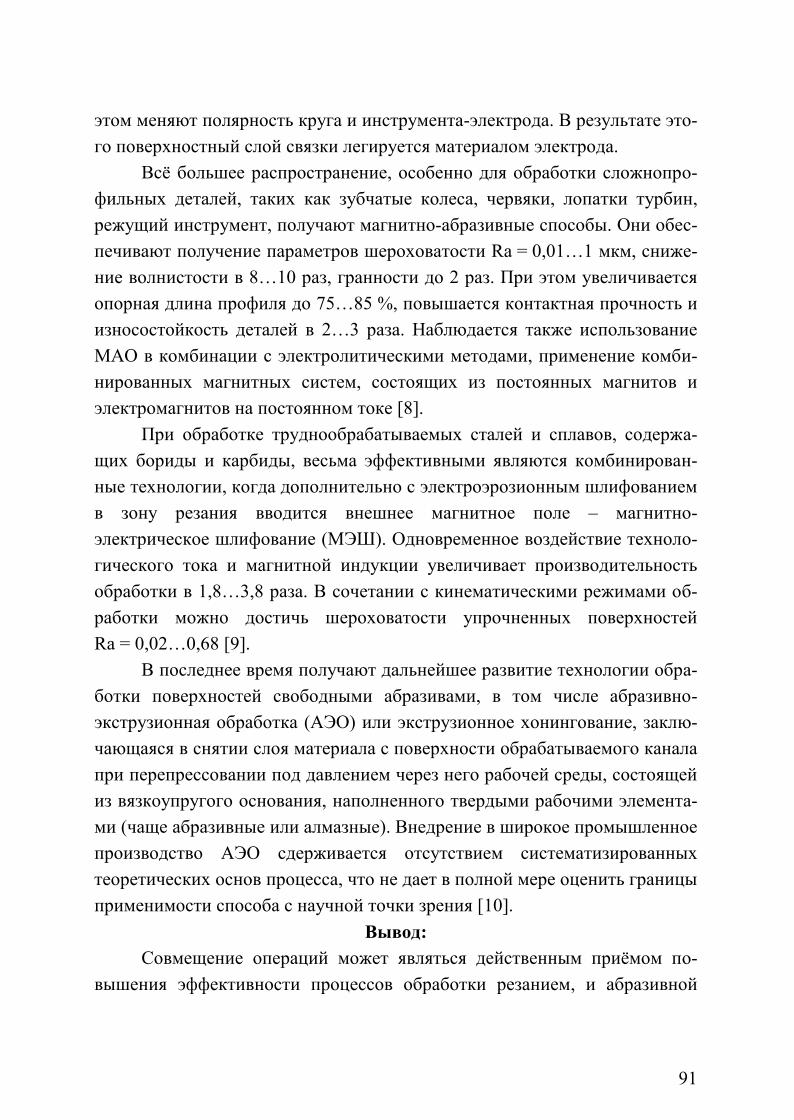
91
этом меняют полярность круга и инструмента-электрода. В результате это-го поверхностный слой связки легируется материалом электрода.
Всё большее распространение, особенно для обработки сложнопро-фильных деталей, таких как зубчатые колеса, червяки, лопатки турбин,режущий инструмент, получают магнитно-абразивные способы. Они обес-печивают получение параметров шероховатости Ra = 0,01…1 мкм, сниже-ние волнистости в 8…10 раз, гранности до 2 раз. При этом увеличиваетсяопорная длина профиля до 75…85 %, повышается контактная прочность иизносостойкость деталей в 2…3 раза. Наблюдается также использованиеМАО в комбинации с электролитическими методами, применение комби-нированных магнитных систем, состоящих из постоянных магнитов иэлектромагнитов на постоянном токе [8].
При обработке труднообрабатываемых сталей и сплавов, содержа-щих бориды и карбиды, весьма эффективными являются комбинирован-ные технологии, когда дополнительно с электроэрозионным шлифованиемв зону резания вводится внешнее магнитное поле – магнитно-электрическое шлифование (МЭШ). Одновременное воздействие техноло-гического тока и магнитной индукции увеличивает производительностьобработки в 1,8…3,8 раза. В сочетании с кинематическими режимами об-работки можно достичь шероховатости упрочненных поверхностейRa = 0,02…0,68 [9].
В последнее время получают дальнейшее развитие технологии обра-ботки поверхностей свободными абразивами, в том числе абразивно-экструзионная обработка (АЭО) или экструзионное хонингование, заклю-чающаяся в снятии слоя материала с поверхности обрабатываемого каналапри перепрессовании под давлением через него рабочей среды, состоящейиз вязкоупругого основания, наполненного твердыми рабочими элемента-ми (чаще абразивные или алмазные). Внедрение в широкое промышленноепроизводство АЭО сдерживается отсутствием систематизированныхтеоретических основ процесса, что не дает в полной мере оценить границыприменимости способа с научной точки зрения [10].
Вывод:Совмещение операций может являться действенным приёмом по-
вышения эффективности процессов обработки резанием, и абразивной

92
обработки, в частности. Появляется шанс улучшить требуемый параметробработки, особенно в тех случаях, когда потенциал традиционных техно-логий не позволяет это сделать.
Литература:
1. Модернизация России: условия, предпосылки, шансы: сборникстатей и материалов; под ред. В. Л. Иноземцева. – Вып. 1 – М. : Центр ис-следований постиндустриального общества, 2009. - 240 с.
2. Проволоцкий А. Е. Проектирование технологических процессовшлифования кругами из синтетических сверхтвердых материалов с гидро-абразивной обработкой / А. Е. Проволоцкий, Мохеб Мохаммад // Систем-ные технологии. – 2009. – № 4. – С. 50–61.
3. Янюшкин А. С. Перспективный метод обработки твердого сплавана плоскошлифовальном станке / А. С. Янюшкин, С. М. Кудряшов,Д. В. Сивков, Ю. Б. Лисафьев, П. В. Архипов // Системы. Методы. Техно-логии. – 2009. – № 4. – С. 71–74.
4. Братан С. М. Моделирование электрохимической составляющейсъёма материала на операции комбинированного шлифования в пассиви-рующих средах / С. М. Братан, Ю. К. Новоселов, Н. А. Минаев // Науковіпраці Донецького національного технічного університету. Серія: Маши-нобудування і машинознавство. – 2009. – С. 20–28.
5. Соколов В. О. Обеспечение точности профильной алмазно-абразивной обработки изделий из труднообрабатываемых материалов /В. О. Соколов // Вестник СГТУ. – 2009. – № 3. – Вып. 2 – С. 164–167.
6. Дитиненко С. А. Условия уменьшения шероховатости обработкипри шлифовании / С. А. Дитиненко, И. Н. Снисаренко, А. А. Машко,А. В. Черненко // Наукові праці Донецького національного технічногоуніверситету. Серія: Машинобудування і машинознавство. – 2008. –С. 16–22.
7. Бахтиаров Ш. А. Повышение эффективности контактно-эрозионного профилирования алмазных кругов и алмазного профильногошлифования / Ш. А. Бахтиаров, В. В. Волков // Вестник машиностроения.– 2010. – № 6. – С. 71–73.

93
8. Матюха П. Г. Современные тенденции развития магнитно-абразивной обработки / П. Г. Матюха, А. В. Бурдин // Наукові праці До-нецького національного технічного університету. Серія: Машинобудуван-ня і машинознавство. – 2009. – С. 166–173.
9. Нерода М. В. Влияние электрофизических параметров магнитно-электрического шлифования на съём материала и микрогеометрию по-верхностного слоя твердых покрытий / М. В. Нерода // Материалы между-народн. научно-практич. конф. «Техника и технологии: инновации и каче-ство» – Барановичи 23–24 ноября 2007 г. – Барановичи: РИО БарГУ, 2007.– С. 21–25.
10. Левко В. А. Абразивно-экструзионная обработка. Современныйуровень. Проблемы и направления развития / В. А. Левко // Известия ТПУ.– 2006. – Т. 309. – № 6. – С. 125–129.
НОВЫЕ ПОДХОДЫ К СОЗДАНИЮСИСТЕМ ДИАГНОСТИРОВАНИЯ
ОСНОВНОГО ОБОРУДОВАНИЯ АЭС РФ
Панкин А. М.Санкт-Петербургский государственный
политехнический университет
При создании новых объектов атомной энергетики (ЛАЭС-2,НВАЭС-2) существенное значение приобретает повышение надежности иэкономичности основного оборудования этих объектов. При этом предла-гается взамен прежнего подхода «Техническое обслуживание и ремонт порегламенту» переходить на новую стратегию «ТО и Р по техническому со-стоянию». Для реализации этой концепции необходимо разработать новыеметодики диагностирования тех объектов и изделий, которые предполага-ется контролировать в процессе отработки заданного им ресурса. В случаеАЭС к таким объектам диагностирования, в первую очередь, относятся:
- главные циркуляционные насосные агрегаты;- турбогенераторная установка;- электроприводная арматура;- питательные и другие насосы и вентиляторы,
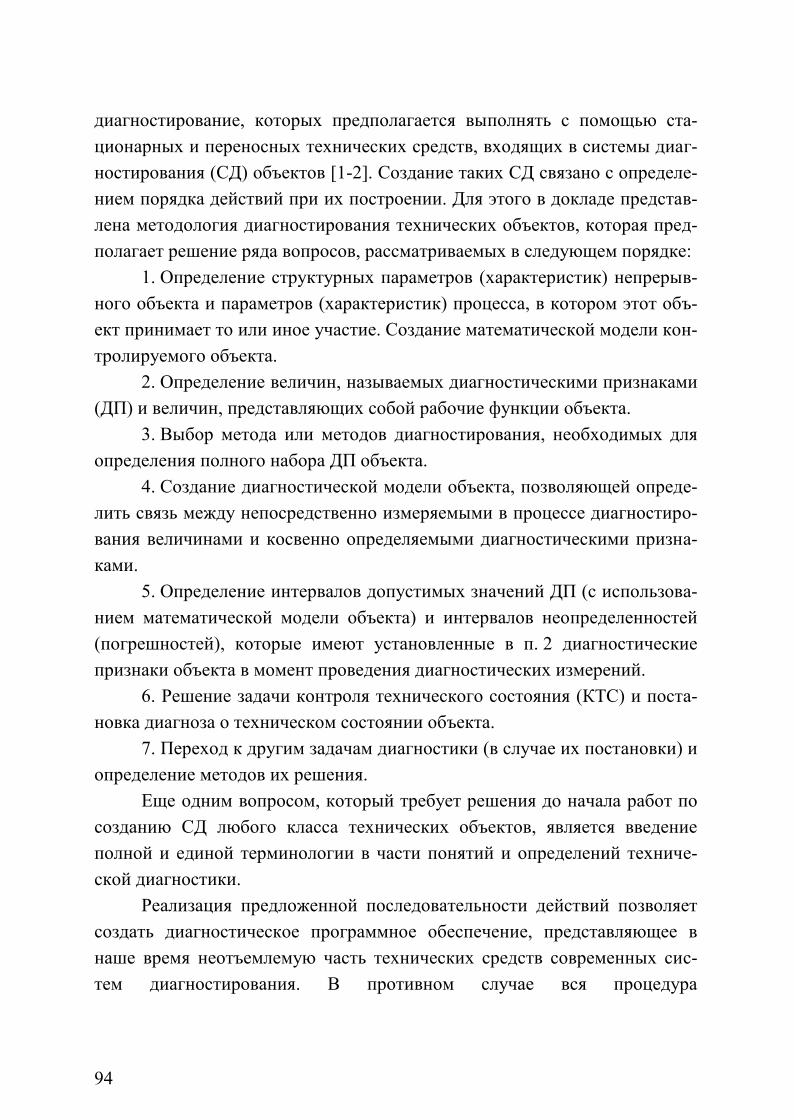
94
диагностирование, которых предполагается выполнять с помощью ста-ционарных и переносных технических средств, входящих в системы диаг-ностирования (СД) объектов [1-2]. Создание таких СД связано с определе-нием порядка действий при их построении. Для этого в докладе представ-лена методология диагностирования технических объектов, которая пред-полагает решение ряда вопросов, рассматриваемых в следующем порядке:
1. Определение структурных параметров (характеристик) непрерыв-ного объекта и параметров (характеристик) процесса, в котором этот объ-ект принимает то или иное участие. Создание математической модели кон-тролируемого объекта.
2. Определение величин, называемых диагностическими признаками(ДП) и величин, представляющих собой рабочие функции объекта.
3. Выбор метода или методов диагностирования, необходимых дляопределения полного набора ДП объекта.
4. Создание диагностической модели объекта, позволяющей опреде-лить связь между непосредственно измеряемыми в процессе диагностиро-вания величинами и косвенно определяемыми диагностическими призна-ками.
5. Определение интервалов допустимых значений ДП (с использова-нием математической модели объекта) и интервалов неопределенностей(погрешностей), которые имеют установленные в п. 2 диагностическиепризнаки объекта в момент проведения диагностических измерений.
6. Решение задачи контроля технического состояния (КТС) и поста-новка диагноза о техническом состоянии объекта.
7. Переход к другим задачам диагностики (в случае их постановки) иопределение методов их решения.
Еще одним вопросом, который требует решения до начала работ посозданию СД любого класса технических объектов, является введениеполной и единой терминологии в части понятий и определений техниче-ской диагностики.
Реализация предложенной последовательности действий позволяетсоздать диагностическое программное обеспечение, представляющее внаше время неотъемлемую часть технических средств современных сис-тем диагностирования. В противном случае вся процедура
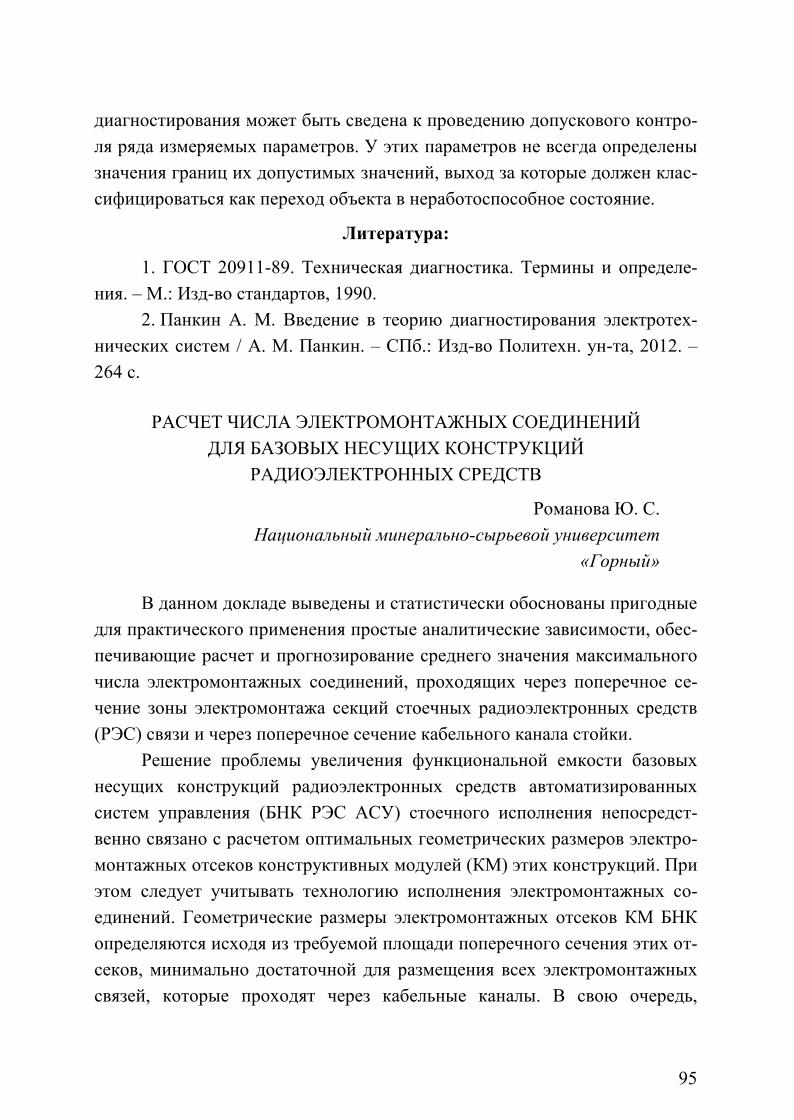
95
диагностирования может быть сведена к проведению допускового контро-ля ряда измеряемых параметров. У этих параметров не всегда определенызначения границ их допустимых значений, выход за которые должен клас-сифицироваться как переход объекта в неработоспособное состояние.
Литература:
1. ГОСТ 20911-89. Техническая диагностика. Термины и определе-ния. – М.: Изд-во стандартов, 1990.
2. Панкин А. М. Введение в теорию диагностирования электротех-нических систем / А. М. Панкин. – СПб.: Изд-во Политехн. ун-та, 2012. –264 с.
РАСЧЕТ ЧИСЛА ЭЛЕКТРОМОНТАЖНЫХ СОЕДИНЕНИЙДЛЯ БАЗОВЫХ НЕСУЩИХ КОНСТРУКЦИЙ
РАДИОЭЛЕКТРОННЫХ СРЕДСТВ
Романова Ю. С.Национальный минерально-сырьевой университет
«Горный»
В данном докладе выведены и статистически обоснованы пригодныедля практического применения простые аналитические зависимости, обес-печивающие расчет и прогнозирование среднего значения максимальногочисла электромонтажных соединений, проходящих через поперечное се-чение зоны электромонтажа секций стоечных радиоэлектронных средств(РЭС) связи и через поперечное сечение кабельного канала стойки.
Решение проблемы увеличения функциональной емкости базовыхнесущих конструкций радиоэлектронных средств автоматизированныхсистем управления (БНК РЭС АСУ) стоечного исполнения непосредст-венно связано с расчетом оптимальных геометрических размеров электро-монтажных отсеков конструктивных модулей (КМ) этих конструкций. Приэтом следует учитывать технологию исполнения электромонтажных со-единений. Геометрические размеры электромонтажных отсеков КМ БНКопределяются исходя из требуемой площади поперечного сечения этих от-секов, минимально достаточной для размещения всех электромонтажныхсвязей, которые проходят через кабельные каналы. В свою очередь,

96
требуемая площадь поперечного сечения электромонтажных отсеков зави-сит и от числа этих связей, проходящих через нее, и от геометрических ха-рактеристик кабельных изделий, при помощи которых эти связи реализо-ваны. В любом случае, отправной точкой для проведения подобных расче-тов служит максимальное число электромонтажных соединений, прохо-дящих через поперечное сечение электромонтажного отсека.
Согласно существующим конструктивным схемам построения мно-гоуровневых стоечных БНК электромонтажные отсеки характерны длясекций (зона размещения электромонтажа) и стоек (кабельные каналы).
Исходный статистический материал представлял собой выборкузначений максимального числа электромонтажных соединений, проходя-щих через поперечное сечение зоны электромонтажа секций и кабельныхканалов стойки или через поперечное сечение кабельных каналов стоеч-ных РЭС и суммарного числа задействованных контактов электросоеди-нителей всех блоков или секций, устанавливаемых в каждой исследуемойРЭС стоечного исполнения. При этом общий объем выборки содержал па-раметры более 500 секций различных классов РЭС и более 50 РЭС стоеч-ного исполнения, разработанных в течение последних 10 лет.
Исходя из физических соображений и опыта разработки БНК РЭСразличного назначения с помощью методов наименьших квадратов и фак-торного планирования эксперимента, исследовались следующие полино-минальные модели:
KbaK 11 (1)
222 KcKbaK (2)
где K - среднестатистическое число максимального числа электромон-тажных соединений, проходящих через поперечное сечение зоны элек-
тромонтажа или кабельного канала; ca1 , - коэффициенты полиномов;
K - суммарное число задействованных контактов электросоединителейвсех блоков, компонуемых в секции РЭС.
В результате расчетов было установлено, что:

97
- коэффициенты 1 2,a a и 1 2,b b примерно попарно равны (максималь-ное относительное различие составляет не более 10 % для зон электромон-тажа секций и не более 12 % для кабельных каналов стоек);
- среднеквадратическое отклонение K , вычисленное для полинома(2), незначительно меньше среднеквадратического отклонения, опреде-ленного для полинома (1) (максимальное расхождение не более 9 % длязон электромонтажа секций и не более 11 % для кабельных каналов стоек);
- коэффициент с имеет значения чрезвычайно низкого порядка (пер-вая цифра находится на уровне 10-7 для электромонтажа секций и для ка-бельных каналов стоек);
- коэффициенты полиномов, вычисленные методами наименьшихквадратов и факторного планирования эксперимента, практически равны(расхождение не более 14 % для зон электромонтажа секций и не более15 % для кабельных каналов стоек).
Обобщение выявленных факторов с учетом различных статистиче-ских проверок, в том числе на воспроизводимость результатов экспери-ментальных данных по критерию Кохрена (проверка гипотезы о равенстве
дисперсий для отклонений KK показала, что результаты опыта можносчитать однородными и воспроизводимыми с доверительной вероятно-стью не менее 0,8) и на адекватность математической модели (1) по крите-
рию Фишера ( 1FT ), позволяет принять линейные модели, как приемле-мые для определения среднестатистического значения максимальногочисла электромонтажных соединений, проходящих через поперечное се-чение зоны электромонтажа секций стоечных РЭС и поперечное сечениекабельных каналов стоек. Отсюда, с учетом вычисленных коэффициентовполиномы (1) и (2) можно представить как
114K0470EK , (3)
137K0520EK , , (4)
где Е – обозначает выбор меньшего целого числа.Следует отметить, что вероятность согласования теоретической
плотности распределения отклонений KK с экспериментальной

98
достаточно велика и составляет не менее 0,82-0,85 при расчете макси-мального числа электромонтажных соединений, проходящих через попе-речное сечение зоны электромонтажа секций или кабельного канала стой-ки. Поэтому можно принять гипотезу о нормальном законе распределенияотклонений и с учетом этого, а также представительности объема выбор-
ки, определить доверительные интервалы для коэффициентов 1 1 2 2, , ,a b a b .В работах [1, 2] выводятся и статистически обосновываются пригод-
ные для практического применения аналитические зависимости, обеспе-чивающие расчет и прогнозирование среднего числа задействованных вы-
водов ИЭТ в i-м ЭМ (()iK ) в зависимости от общего числа выводов ИЭТ
(()o iK ):
()() 0,95 1,7i o iK K . (5)
Выражение для определения минимально необходимого числа кон-
тактов блочного электросоединителя (()b iN ), необходимое для обеспечения
внутрисекционных электрических связей ЭМ i-го типа:()()() 0,008 5 1b i i iN E K n , (6)
где()iK - среднее число задействованных выводов ИЭТ, на которых по-
строен ЭМ i-го типа;()in - количество корпусов ИЭТ, размещаемых на КП
i-го ЭМ.Для определения числа контактов электросоединителей кабельных
вводов i-го вида оборудования, которое минимально необходимо для осу-ществления межсекционных и межстоечных электрических связей, рас-считываем общее число задействованных контактов блочных электросо-
единителей ЭМ ( iN ) по следующей формуле:
)()( ib
ibi nNN , (7)
где)(i
bn - количество блоков аппаратуры i-го вида в секции.
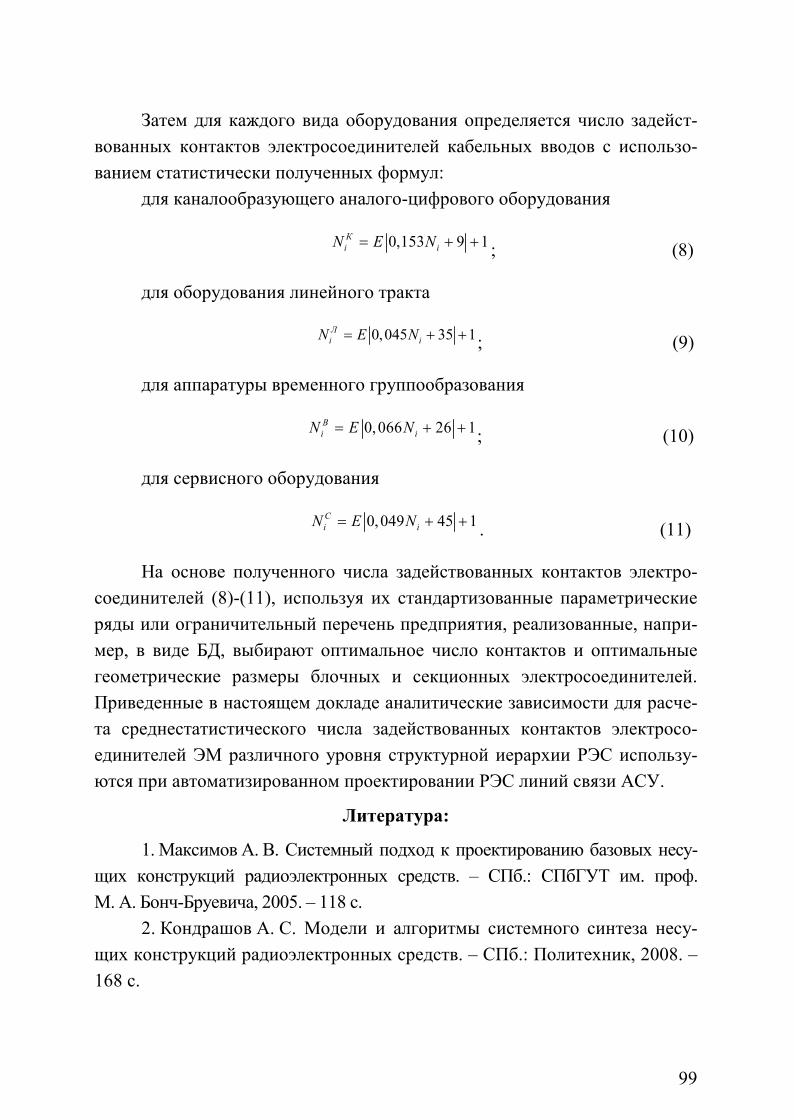
99
Затем для каждого вида оборудования определяется число задейст-вованных контактов электросоединителей кабельных вводов с использо-ванием статистически полученных формул:
для каналообразующего аналого-цифрового оборудования
0,153 9 1Кi iN E N ; (8)
для оборудования линейного тракта
0,045 35 1Лi iN E N ; (9)
для аппаратуры временного группообразования
0,066 26 1Вi iN E N ; (10)
для сервисного оборудования
0,049 45 1Сi iN E N . (11)
На основе полученного числа задействованных контактов электро-соединителей (8)-(11), используя их стандартизованные параметрическиеряды или ограничительный перечень предприятия, реализованные, напри-мер, в виде БД, выбирают оптимальное число контактов и оптимальныегеометрические размеры блочных и секционных электросоединителей.Приведенные в настоящем докладе аналитические зависимости для расче-та среднестатистического числа задействованных контактов электросо-единителей ЭМ различного уровня структурной иерархии РЭС использу-ются при автоматизированном проектировании РЭС линий связи АСУ.
Литература:
1. Максимов А. В. Системный подход к проектированию базовых несу-щих конструкций радиоэлектронных средств. – СПб.: СПбГУТ им. проф.М. А. Бонч-Бруевича, 2005. – 118 с.
2. Кондрашов А. С. Модели и алгоритмы системного синтеза несу-щих конструкций радиоэлектронных средств. – СПб.: Политехник, 2008. –168 с.

100
ИССЛЕДОВАНИЕ КОНЕЧНЫХ ЭЛЕМЕНТОВДЛЯ РАСЧЕТА ТОНКОСТЕННЫХ СТЕРЖНЕВЫХ СИСТЕМ
Рыбаков В. А., Тихонова С. Ю.Санкт-Петербургский государственный
политехнический университет
ЛСТК - это тонкостенные стержневые конструкции из оцинкованнойстали толщиной до 2 мм. Классические научные теории расчета таких кон-струкций ввиду сложности математических уравнений не могут быть ис-пользованы в повседневной практике конструктора. Необходимостью яв-ляется использование программного метода конечных элементов, однакоприменительно к бессдвиговой и полусдвиговой теориям, он недостаточноразвит. В связи с этим, целью данной работы является разработка числен-ного метода расчета тонкостенных стержневых систем на основе полу-сдвиговой теории стесненного кручения.
В результате исследования была построена матрица жесткости ко-нечных элементов тонкостенных стержней открытого профиля по бес-сдвиговой теории посредством кубической аппроксимации функций кру-чения и депланации. Построены три типа матриц жесткости конечныхэлементов тонкостенных стержней открытого профиля по полусдвиговойтеории, основанные на трех видах аппроксимаций координатных функ-ций: линейная аппроксимация функций кручения 2-узлового КЭ с 4 степе-нями свободы; квадратичная аппроксимация функции кручения и линей-ная аппроксимация функции депланации 3-узлового КЭ с 5 степенямисвободы; квадратичная аппроксимация функций кручения и депланации 3-узлового КЭ с 6 степенями свободы.
Это позволило получить формулы для вычисления коэффициентавлияния формы сечения для швеллерового и двутаврового профилей и оп-ределить сходимость предложенных численных методов расчета.
Исследование показало, что метод квадратичной аппроксимации ба-зисных функций наиболее оптимален для практических расчетов на проч-ность тонкостенных конструкций, так как он имеет оптимальное соотно-шение между скоростью сходимости и простотой реализации.
101
Полученный алгоритм лег в основу вычислительного комплекса ста-тического расчета пространственных конструкций из тонкостенныхстержней открытого и замкнутого профилей.
Литература:
1. Рыбаков В. А. Основы строительной механики легких стальныхтонкостенных конструкций: учеб. пособие. СПб.: Изд-во СПбГПУ, 2010.206 с.
2. Лалин В. В., Рыбаков В. А., Конечные элементы для расчета огра-ждающих конструкций из тонкостенных профилей // Инженерно-строительный журнал. 2011. № 8(26). С. 69-80.
ВЛИЯНИЕ КАЧЕСТВА ЭЛЕКТРОЭНЕРГИИНА ОБОРУДОВАНИЕ ПОДСТАНЦИЙ
Рылов Ю. А., Гатиятов И. З., Мухаметжанов Р. Н.Казанский государственный
энергетический университет
Обеспечение качества электроэнергии в электрических сетях с каж-дым годом становится одной из наиболее актуальных задач.
В современных условиях на промышленных объектах и объектах со-циального назначения для освещения помещений используется большоеколичество осветительного оборудования. Зачастую в качестве источниковосвещения применяются люминесцентные, энергосберегающие и светоди-одные лампы. Недостатком люминесцентных ламп (применяемых в боль-шом количестве в помещениях большой площади) является потреблениеими реактивной мощности, которая растет с увеличением подводимого кним напряжения.
Совокупность электроприемников, подключаемых к шинам 0,4 кВтрансформаторной подстанции, оказывает существенное влияние на пи-тающую сеть.
Электроприемники с нелинейными вольтамперными характеристи-ками потребляют из сети несинусоидальные токи при подведении к их за-жимам синусоидального напряжения. Токи высших гармоник создают па-дения напряжения в сопротивлениях элементов сети и, накладываясь на

102
основную синусоиду напряжения, приводят к искажениям формы кривойнапряжения в узлах электрической сети. В связи с этим такие электропри-емники часто называют источниками высших гармоник.
Искажения напряжения, возникающие при работе таких потребите-лей, приводят к нарушениям в работе оборудования подстанции и комму-тационных аппаратов.
Литература:
1. Суднова В. В. Качество электрической энергии.
ОБЕСПЕЧЕНИЕ НАДЕЖНОГО ЭЛЕКТРОСНАБЖЕНИЯКАЗАНСКОГО ЭНЕРГОРАЙОНА
Сабитов А. Е., Федотов А. И.Казанский государственный энергетический университет
Город Казань является столицей Всемирной летней Универсиады2013 года. Данное мероприятие станет крупнейшим спортивным событиемне только для Татарстана, но и для России в целом. Обеспечение надежно-го электроснабжения объектов Универсиады является важнейшей задачейэнергосистемы, являющейся одной из составляющих организации данногомероприятия на высоком уровне.
Все объекты Универсиады расположены в Казанском энергорайоне(КЭ). В настоящее время потребление КЭ составляет 1200-1400 МВт. Ис-точником генерации являются Казанские ТЭЦ–1, ТЭЦ–2, ТЭЦ–3. При ус-тановленной суммарной мощности 830 МВт их экономически эффектив-ная суммарная мощность составляет порядка 150 МВт в летний период и450-550 МВт в зимний. При этом дефицит мощности в КЭ может дости-гать 500-800 МВт. В этой связи недостаточная пропускная способностьтранзита между Заинской ГРЭС и КЭ является наибольшим риском в во-просах безопасности и надежности электроснабжения потребителей. Наэти линии ложится максимально допустимый уровень нагрузок даже внормальных режимах работы сети. Ряд объектов энергетического хозяйст-ва Республики Татарстан КЭ несут нагрузку выше нормативной.
Без решения системных проблем КЭ обеспечить надежное энерго-снабжение объектов Всемирной летней Универсиады 2013 г., а также
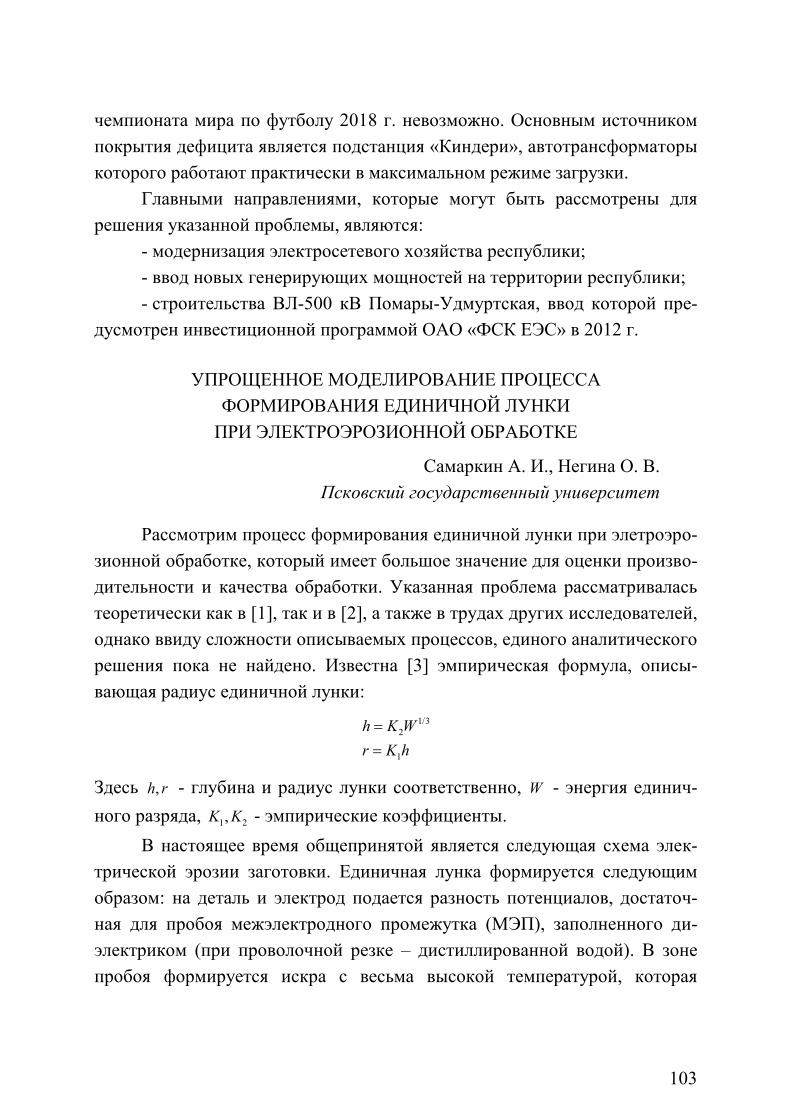
103
чемпионата мира по футболу 2018 г. невозможно. Основным источникомпокрытия дефицита является подстанция «Киндери», автотрансформаторыкоторого работают практически в максимальном режиме загрузки.
Главными направлениями, которые могут быть рассмотрены длярешения указанной проблемы, являются:
- модернизация электросетевого хозяйства республики;- ввод новых генерирующих мощностей на территории республики;- строительства ВЛ-500 кВ Помары-Удмуртская, ввод которой пре-
дусмотрен инвестиционной программой ОАО «ФСК ЕЭС» в 2012 г.
УПРОЩЕННОЕ МОДЕЛИРОВАНИЕ ПРОЦЕССАФОРМИРОВАНИЯ ЕДИНИЧНОЙ ЛУНКИ
ПРИ ЭЛЕКТРОЭРОЗИОННОЙ ОБРАБОТКЕ
Самаркин А. И., Негина О. В.Псковский государственный университет
Рассмотрим процесс формирования единичной лунки при элетроэро-зионной обработке, который имеет большое значение для оценки произво-дительности и качества обработки. Указанная проблема рассматриваласьтеоретически как в [1], так и в [2], а также в трудах других исследователей,однако ввиду сложности описываемых процессов, единого аналитическогорешения пока не найдено. Известна [3] эмпирическая формула, описы-вающая радиус единичной лунки:
1/32
1
h K Wr K h
Здесь ,h r - глубина и радиус лунки соответственно, W - энергия единич-ного разряда, 1 2,K K - эмпирические коэффициенты.
В настоящее время общепринятой является следующая схема элек-трической эрозии заготовки. Единичная лунка формируется следующимобразом: на деталь и электрод подается разность потенциалов, достаточ-ная для пробоя межэлектродного промежутка (МЭП), заполненного ди-электриком (при проволочной резке – дистиллированной водой). В зонепробоя формируется искра с весьма высокой температурой, которая
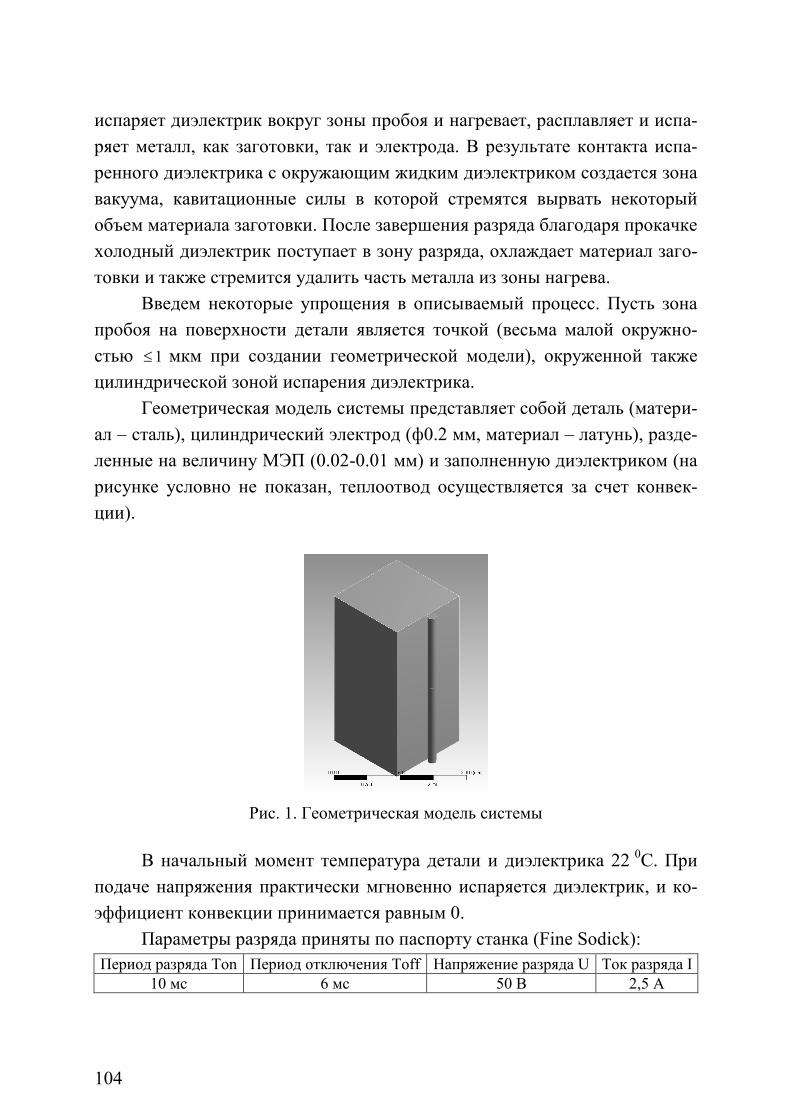
104
испаряет диэлектрик вокруг зоны пробоя и нагревает, расплавляет и испа-ряет металл, как заготовки, так и электрода. В результате контакта испа-ренного диэлектрика с окружающим жидким диэлектриком создается зонавакуума, кавитационные силы в которой стремятся вырвать некоторыйобъем материала заготовки. После завершения разряда благодаря прокачкехолодный диэлектрик поступает в зону разряда, охлаждает материал заго-товки и также стремится удалить часть металла из зоны нагрева.
Введем некоторые упрощения в описываемый процесс. Пусть зонапробоя на поверхности детали является точкой (весьма малой окружно-стью 1 мкм при создании геометрической модели), окруженной такжецилиндрической зоной испарения диэлектрика.
Геометрическая модель системы представляет собой деталь (матери-ал – сталь), цилиндрический электрод (ф0.2 мм, материал – латунь), разде-ленные на величину МЭП (0.02-0.01 мм) и заполненную диэлектриком (нарисунке условно не показан, теплоотвод осуществляется за счет конвек-ции).
Рис. 1. Геометрическая модель системы
В начальный момент температура детали и диэлектрика 22 0С. Приподаче напряжения практически мгновенно испаряется диэлектрик, и ко-эффициент конвекции принимается равным 0.
Параметры разряда приняты по паспорту станка (Fine Sodick):Период разряда Ton Период отключения Toff Напряжение разряда U Ток разряда I
10 мс 6 мс 50 В 2,5 А
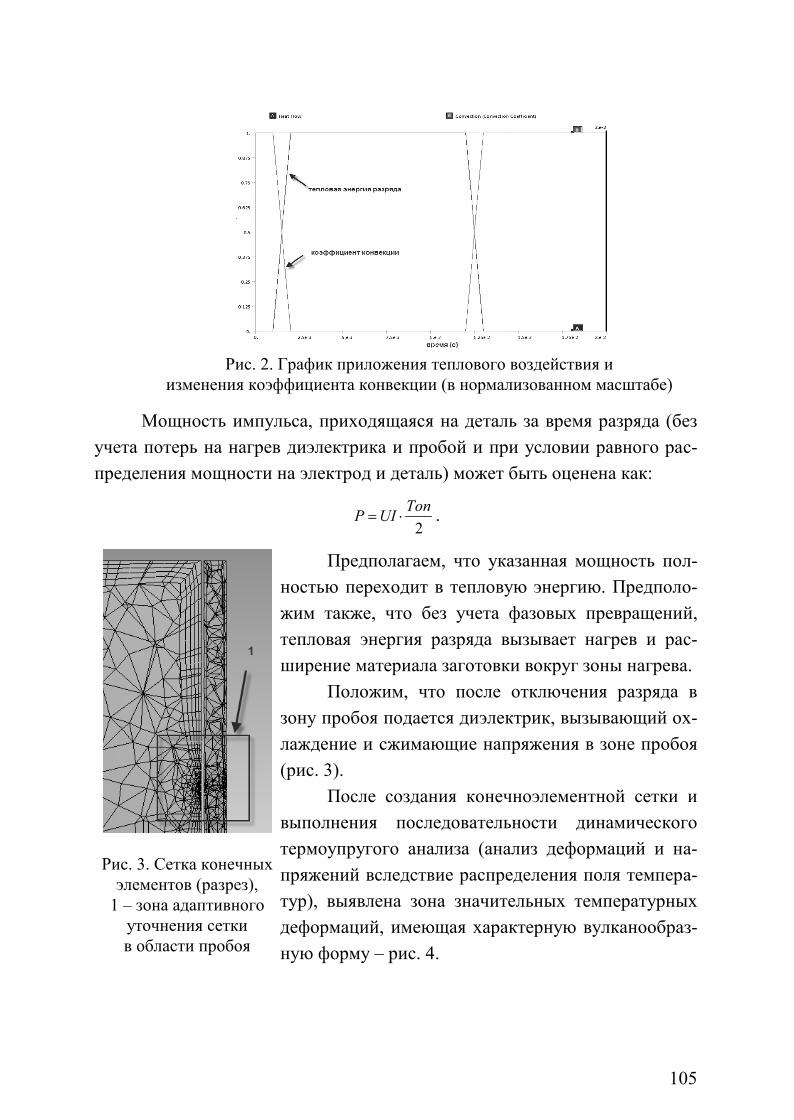
105
Рис. 2. График приложения теплового воздействия иизменения коэффициента конвекции (в нормализованном масштабе)
Мощность импульса, приходящаяся на деталь за время разряда (безучета потерь на нагрев диэлектрика и пробой и при условии равного рас-пределения мощности на электрод и деталь) может быть оценена как:
2TonP UI .
Рис. 3. Сетка конечныхэлементов (разрез),
1 – зона адаптивногоуточнения сеткив области пробоя
Предполагаем, что указанная мощность пол-ностью переходит в тепловую энергию. Предполо-жим также, что без учета фазовых превращений,тепловая энергия разряда вызывает нагрев и рас-ширение материала заготовки вокруг зоны нагрева.
Положим, что после отключения разряда взону пробоя подается диэлектрик, вызывающий ох-лаждение и сжимающие напряжения в зоне пробоя(рис. 3).
После создания конечноэлементной сетки ивыполнения последовательности динамическоготермоупругого анализа (анализ деформаций и на-пряжений вследствие распределения поля темпера-тур), выявлена зона значительных температурныхдеформаций, имеющая характерную вулканообраз-ную форму – рис. 4.

106
а) б)
Рис. 4. Температурные деформации в зоне лунки (а) – распределениеполя температур, б) – расчетные деформации)
В результате воздействия силовых факторов, металл будет удалятьсяв той области, где коэффициент запаса по напряжениям достаточно мал(менее 1-2). Визуализация указанной области дает следующую картину(рис. 5):
а) б)
Рис. 5
Заметим, что форма лунки является характерной «тарелкообразной»,что соответствует экспериментальным данным, а форма отделенной час-тицы материала заготовки с одной стороны – округлая и оплавленная, а с
107
другой – характеризуется неровностями в связи с ее отломом, что такжесоответствует наблюдаемым в экспериментах результатам [4].
Таким образом, даже такая максимально упрощенная модель про-цесса показывает хорошие результаты с качественной стороны, а также сколичественной – по размеру единичной лунки.
Литература:
1. Лазаренко Б. Р., Лазаренко Н. И. Физика искрового способа обра-ботки металлов. ЦБТИ ЭП, 1946. 76 с.
2. Золотых Б. Н. О физической природе электроискровой обработкиметаллов. – В кн.: Электроискровая обработка металлов. М., Изд-воАН СССР, 1957, вып. 1, с. 38-69.
3. Фотеев Н. К. Технология электроэрозионной обработки. - М., Ма-шиностроение, 1980.- 203 с.
4. Намитоков К. К. Электроэрозионные явления. – М., Энергия, 1978.– 456 с.
НЕКОТОРЫЕ ОСОБЕННОСТИ АНАЛИЗАТОНКОСТЕННЫХ КОНСТРУКЦИЙ
НА ПРИМЕРЕ РАСЧЕТА СЕЙСМИЧЕСКОЙ УСТОЙЧИВОСТИКОЛОДЦА НЕФТЕПРОВОДА
Самаркин А. И., Самаркина Е. И.Псковский государственный университет
Расчет тонкостенных конструкций имеет ряд особенностей, связан-ных с выбором геометрической модели, построения сетки конечных эле-ментов, учета нагрузок и выбора вариантов расчета.
Геометрия модели может быть представлена в виде твердотельноймодели, либо в виде модели поверхностной (в виде набора поверхностей иассоциированных с ними толщин). Выбор геометрии определяет и вид ко-нечных элементов, используемых для создания сетки. Твердотельной мо-дели соответствуют объемные пирамидальные (тетраэдральные) или приз-матические (гексаэдральные) элементы, причем из-за значительной разни-цы толщины и размеров конструкции добиться качественной сетки
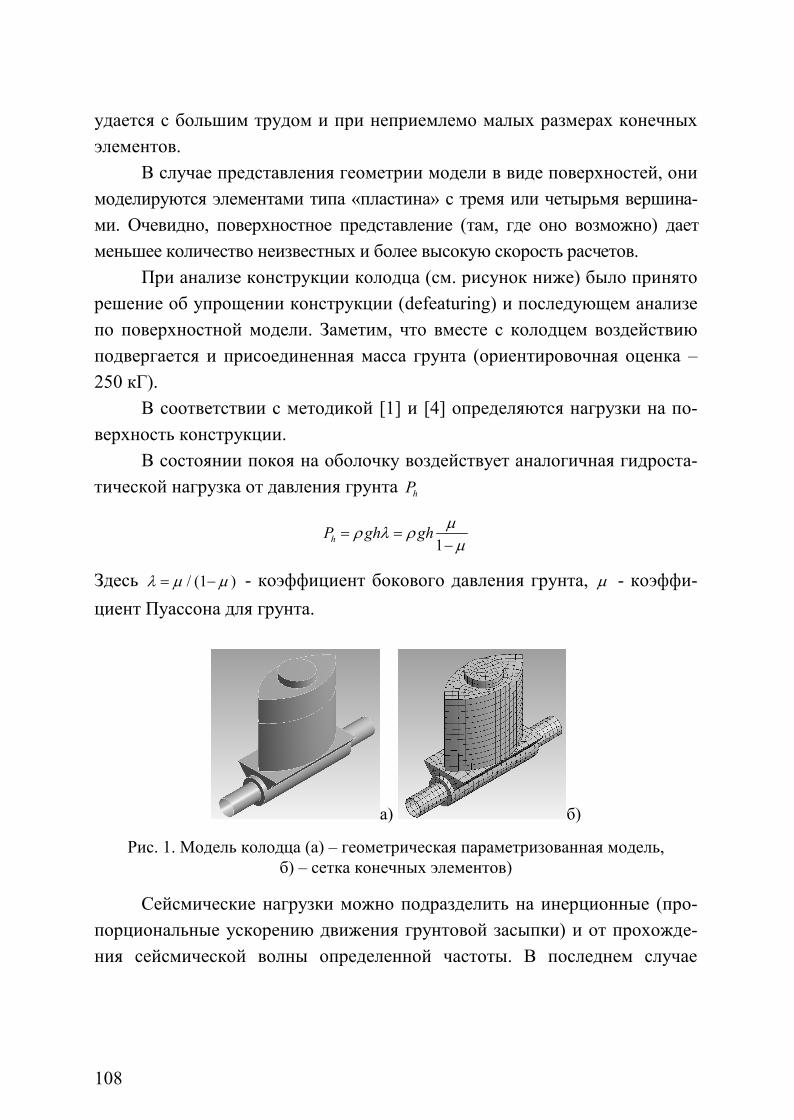
108
удается с большим трудом и при неприемлемо малых размерах конечныхэлементов.
В случае представления геометрии модели в виде поверхностей, онимоделируются элементами типа «пластина» с тремя или четырьмя вершина-ми. Очевидно, поверхностное представление (там, где оно возможно) даетменьшее количество неизвестных и более высокую скорость расчетов.
При анализе конструкции колодца (см. рисунок ниже) было приняторешение об упрощении конструкции (defeaturing) и последующем анализепо поверхностной модели. Заметим, что вместе с колодцем воздействиюподвергается и присоединенная масса грунта (ориентировочная оценка –250 кГ).
В соответствии с методикой [1] и [4] определяются нагрузки на по-верхность конструкции.
В состоянии покоя на оболочку воздействует аналогичная гидроста-тической нагрузка от давления грунта hP
1hP gh gh
Здесь / (1 ) - коэффициент бокового давления грунта, - коэффи-циент Пуассона для грунта.
а) б)
Рис. 1. Модель колодца (а) – геометрическая параметризованная модель,б) – сетка конечных элементов)
Сейсмические нагрузки можно подразделить на инерционные (про-порциональные ускорению движения грунтовой засыпки) и от прохожде-ния сейсмической волны определенной частоты. В последнем случае

109
желательно провести анализ отклика системы на вибрации характерногоспектра.
Деформации и коэффициент запаса конструкции при воздействиитолько гидростатического давления показаны ниже
а)
б)
Рис. 2. Распределение напряжений (а) и коэффициента запаса (б)при воздействии давления грунта (влажная глина)
Воздействие спектра нагрузок может быть оценено по степени бли-зости характерных частот спектра собственным частотам, а также по ха-рактеру проявления собственных колебаний. Некоторые собственные час-тоты и деформации представлены ниже.
а) б) в)
Рис. 3. Собственные частоты и формы колебаний
110
Выводы:
Расчет тонкостенных конструкций имеет значительную специфику вспособах моделирования (предпочтительнее представление в виде поверх-ностей), средствах создания конечноэлементных сеток, а также построе-ния расчетных моделей.
Объекты строительных конструкций, помимо инженерных и конеч-ноэлементных расчетов должны также проектироваться с учетом строи-тельных норм и правил (СНиП), несмотря на то, что Согласно п. 1 ст. 6 ФЗот 30.12.2009 г. № 384-ФЗ «Технический регламент о безопасности зданийи сооружений» лишь некоторые СНиПы признаются обязательными к ис-полнению.
Литература:
1. СНиП 2.09.03-85. Сооружения промышленных предприятий. М.1993.
2. Савинов О. А. Сейсмостойкость магистральных трубопроводов испециальных сооружений нефтяной и газовой промышленности. М., Нау-ка, 1980.
3. СНиП 2.05.06 – 85 Магистральные трубопроводы М., 1986.4. СНиП II-7-81 «Нормы проектирования. Строительство в сейсми-
ческих районах».5. Б. К. Карапетян, Н. К. Карапетян. Сейсмические воздействия на
здания и сооружения. Наука, М., 1978.
ДИНАМИЧЕСКИЕУГЛОВЫЕ ХАРАКТЕРИСТИКИ
ТУРБОГЕНЕРАТОРОВ
Серов А. Е.Институт ядерной энергетики (филиал)
Санкт-Петербургского государственногополитехнического университета, г. Сосновый Бор
Работа турбогенераторов на электрических станциях связана с регу-лированием активной и реактивной мощности. Зависимости активной (Р)и реактивной (Q) мощностей от угла нагрузки (угол тетта θ) определяются
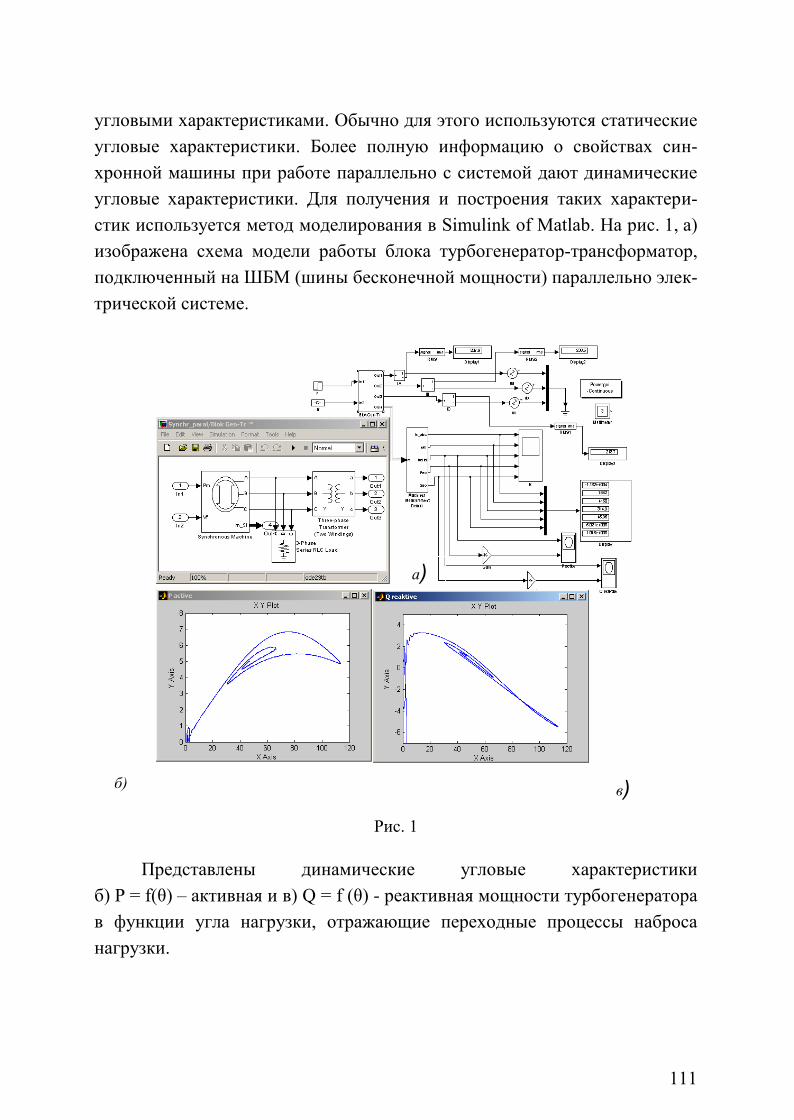
111
угловыми характеристиками. Обычно для этого используются статическиеугловые характеристики. Более полную информацию о свойствах син-хронной машины при работе параллельно с системой дают динамическиеугловые характеристики. Для получения и построения таких характери-стик используется метод моделирования в Simulink of Matlab. На рис. 1, а)изображена схема модели работы блока турбогенератор-трансформатор,подключенный на ШБМ (шины бесконечной мощности) параллельно элек-трической системе.
Рис. 1
Представлены динамические угловые характеристикиб) P = f(θ) – активная и в) Q = f (θ) - реактивная мощности турбогенераторав функции угла нагрузки, отражающие переходные процессы набросанагрузки.
а)
в)б)

112
МЕТОДЫ И ПРОГРАММНЫЕ СРЕДСТВА ПРОЕКТИРОВАНИЯФУНКЦИОНАЛЬНО-ТОПОЛОГИЧЕСКИХ СТРУКТУР
РАСПРЕДЕЛЕННЫХ ТЕХНИЧЕСКИХ СИСТЕМПО КРИТЕРИЯМ ЖИВУЧЕСТИ
Симаков И. П., Колоколова В. А.Санкт-Петербургский государственный
политехнический университет
При проектировании пространственно-распределенных энергетиче-ских систем как многоагрегатных автоматизированных технических ком-плексов (АТК) и решении задач научно-обоснованного выбора (синтеза)их функционально-топологических, организационных, технических и дру-гих видов структур, в том числе структур управляющих систем (УС), оп-ределяющими являются требования живучести [1, 2].
Под живучестью АТК и его УС понимается [1, 2, 3] его способностьвыполнять свое назначение (функционировать) быть может с пониженнымуровнем эффективности (мощности, производительности, маневренности,динамической точности) и обеспечением безопасности (безаварийности)комплекса при выходах из строя (разрушениях) части агрегатов, аппарату-ры и линий связи при разрушающих воздействиях аварийной внешнейсреды (АВ) а также сохранять работоспособность агрегатов, непосредст-венно не подвергшихся АВ с обеспечением возможности управления режи-мами работы комплекса с предельными уровнями эффективности, соответст-вующими составу оставшихся в строю компонентов. К таким АВ относятсяпожары, взрывы, затопления, разгерметизации систем со средами с высокойэнергией и другие воздействия, в том числе преднамеренные.
Проблемы количественной оценки уровней живучести АТК связаны,прежде всего, с имеющей место неопределенностью о месте, масштабе,разрушающей силе и времени проявления АВ. При сравнении вариантоворганизации УС (вариантов размещения центральных и резервных постовуправления, вариантов организации электропитания, вариантов по обеспе-чению стойкости элементов и связей) по критериям живучести приходитсярассматривать модели поведения совокупности АТК+УС как целостнойинформационно и энергетически замкнутой системы при различных
113
вариантах АВ. Рассчитываются показатели оценки потенциальной и ре-альной живучести в предположениях абсолютной и фактической стойко-сти аппаратуры и линий связи УС, соответственно. Кроме того, в отличиеот задач количественной оценки системной надежности при анализе жи-вучести АТК и УС возникает потребность учета в моделях кроме струк-турных элементов и линий связи (силовые и сигнальные электрические,трубопроводные), подверженных разрушениям при АВ и существенновлияющих на функционирование комплекса. Все это приводит к резкомувозрастанию размерности моделей анализа живучести как динамических,так и структурных.
В качестве оценок уровней живучести АТК рассматриваются показа-тели или функционалы Y, характеризующие, с одной стороны, уровень ка-чества или эффективности функционирования комплекса, а с другой - уро-вень безаварийности и безопасности работы на множестве возможных ва-риантов реализации АВ.
Задачи синтеза (выбора из альтернативных) структур АТК и УС вусловиях неопределенности сводятся к следующей традиционной схемепринятия решений [3, 4]:среди множества вариантов структур ni sssS ,...,,...,1 на множестве взаи-моисключающих состояний аварийной среды mk HHHH ,...,,...,1 и при на-личии множества значений функций ikYY , характеризующих уровни ра-ботоспособности (эффективности, безаварийности или безопасности) i-говарианта структуры при k-ой реализации АВ, необходимо выбрать струк-туру, оптимальную по некоторому критерию, в наибольшей мере отве-чающему смыслу проектной задачи.
Изучено несколько типичных ситуаций с различной степенью неоп-ределенности об АВ:
(а) априори известно распределение условных вероятностей k по-явления событий kH , причем
)(;1
kk
(б) внешняя среда активно противодействует;(в) известны из физических предпосылок предпочтения априорных
вероятностей ;......1 mk
(г) имеет место полное незнание о возможных реализациях АВ.
114
В ситуациях (а) «раскрытие» неопределенности возможно с исполь-
зованием критерия Байеса
)(
,...,1);(maxarg0
kikkSsi niYS
i
. В ситуации
(б) применим критерий mkniYS ikHHSsiki
,...,1;,...,1;minmaxarg0
, анало-
гичный правилам теории антогонистических игр. Для наиболее неблаго-приятной с точки зрения информированности ситуации (г) обоснована ра-зумность использования критериев типа Ходжеса-Лемана [4]
)(
,...,1);ˆ(maxarg*0
kikk
SSsi niYS
i
, где S* - подмножество структур, для кото-
рых ./1ˆ;maxmin;; ,,,mYYConstY kkikiikkiik Для ситуации (в) в критерии
Ходжеса-Лемана целесообразно следовать рекомендациям Фишборна и
принять:)1(
)1(2ˆ
mm
kmk ; .,...,2,1 mk Когда предпочтения априорных веро-
ятностей имеют вид строгих неравенств mk ......1 , то рекоменду-
ется [4] принять оценкиm
kmkk
2
2̂ ; .,...,2,1 mk
Выбор рациональных структур требует знания количественных зна-чений элементов матрицы ikYY . Для получения ikYY используются ма-тематические методы структурного анализа и программные средства, реа-лизованные в созданном на кафедре «Системный анализ и управление»программном комплексе «Структурный анализ и управление надежно-стью, безопасностью и живучестью» - ПК «СА и У НБЖ» [5].
Рассмотрим анализ живучести двух вариантов энергетической сис-темы гипотетического атомного судна, отличающихся размещением за-пасного поста управления (ЗПУ). На рис. 1 в качестве примера представ-лен первый вариант топологической структуры, в котором ЗПУ размещенв специально выделенном между реакторным и паротурбинным отсеке.Второй вариант отличается от первого размещением ЗПУ в отсеке передреакторным.
При проведении исследований была принята гипотезу о так назы-ваемой максимальной проектной аварии (МПА) – реализация АВ в любомодном из помещений (отсеков) судна. В качестве требований по живучестиприняты:

115
- безусловное сохранение электрической энергии во всех помещени-ях судна кроме, быть может, аварийного;
- обеспечение централизованного управления из главного (элемент29 на рис. 1) или резервного (элемент 510) поста управления.
Рис. 1. Первый вариант структуры АТК: МРК = 108; МСО = 316;количество отказоустойчивых структур = 11 при d = 1
Основные задачи работы состояли в сравнении вариантов системы сразличным размещением ЗПУ, а также в определении минимального числастойких относительно АВ магистральных линий связи, достаточных длябезусловного выполнения принятых критериев живучести.
Результаты исследований, проведенные с использованием ПК «СУ иУ НБЖ», показали, что при рассмотрении основной гипотезы о возможно-сти возникновения МПА (объемного пожара) в любом одном из отсековбез принятия специальных структурных и конструктивных мер требуемыйуровень живучести не обеспечивается. Основной вклад в снижение живу-чести вносит недостаточный уровень защищенности магистральных кабе-лей, обладающих ограниченной стойкостью к воздействию поражающихфакторов объемного пожара. При сравнительной оценке двух вариантовструктур АТК выявлено, что для безусловного обеспечения требований кживучести первый вариант требует почти в два раза меньше ресурсов раз-личного вида, в том потребном числе забортных отверстий в прочномкорпусе, что существенно уменьшает риск его затопления.
116
При выполнении работы отработаны методы построения логико-математических моделей анализа живучести распределенных АТК и ихуправляющих систем при разрушающих АВ с выходом из строя как обо-рудования и аппаратуры комплекса, так и силовых кабелей, кабелей рас-пределения электропитания и сигнальных кабелей для передачи информа-ции в системе с учетом принятых мер по их защищенности (стойкого ис-полнения и/или забортной прокладкой). Отработана и методика выбораминимального числа участков магистральных кабелей, защищенность(стойкость, неуязвимость) которых должна быть обеспечена для безуслов-ного удовлетворения нормативным требованиям к живучести АТК в целомпри принятых гипотезах об АВ.
Литература:
1. Симаков И. П. Критерии безопасности, живучести и эффективно-сти управления и последовательный синтез организации управляющихсистем. - В сб.: Материалы IX Всесоюзного совещания по проблемамуправления. - М.: Наука, 1983.
2. Астров В. В., Симаков И. П. Основы методологии синтеза струк-туры управляющих систем по критериям безопасности, надежности и жи-вучести. - В сб.: Материалы Х Всесоюзного совещания по проблемамуправления. М., 1986.
3. Астров В. В., Симаков И. П. Методы выбора структур управляющихсистем по критериям живучести при различной степени информированностио внешних аварийных воздействиях. - В сб.: Материалы XI Всесоюзного со-вещания по проблемам управления. - М.: Наука, 1989. с. 232-233.
4. Трухаев Р. И. Методы исследования процессов принятия решенийв условиях неопределенности. – Л.: Изд-во Военно-морской академии. –1972.
5. Симаков И. П., Холодных П. В. Многоцелевой программный ком-плекс структурного анализа и управления надежностью, безопасностью иживучестью автоматизированных технических комплексов (см. настоящийсборник). .

117
МНОГОЦЕЛЕВОЙ ПРОГРАММНЫЙ КОМПЛЕКССТРУКТУРНОГО АНАЛИЗА И
УПРАВЛЕНИЯ НАДЕЖНОСТЬЮ И БЕЗОПАСНОСТЬЮАВТОМАТИЗИРОВАННЫХ ТЕХНИЧЕСКИХ КОМПЛЕКСОВ
Симаков И. П., Холодных П. В.Санкт-Петербургский государственный
политехнический университет
Среди многообразия проблем обоснования проектных решений приразработке автоматизированных технических комплексов (АТК) и их ин-формационно-управляющих систем (ИУС) особо следует выделить про-блемы, связанные с выбором их структурной организации – синтезомфункциональных, алгоритмических, топологических, организационных,технических и других видов структур [1], характеризующих идеологиюпостроения и принципы функционирования систем. Основным этапам ре-шения этих задач является этап структурного анализа. Структурный ана-лиз лежит в основе изложенных в [2-4] теоретико-методологическихпринципов проектирования АТК с повышенным риском эксплуатации, та-ких как комплексы технических средств атомных кораблей и судов, энер-гоблоки АЭС [5], объекты производств химической индустрии и многиедругие.
Результаты структурного анализа обеспечивают, прежде всего, вы-бор таких проектных решений, которые предотвращают создание так на-зываемых «структурно-порочных систем» [4, 5]. Структурный анализ име-ет исключительную важность и для алгоритмизации решения задач рекон-фигурации структурно-сложных АТК при любых заранее непредсказуе-мых комбинациях вышедших из строя элементов [4, 5]. Структурный ана-лиз, как известно, является также необходимым этапом, предшествующимнепосредственному расчету детерминированных и вероятностных показа-телей системной надежности, безопасности, живучести и эффективностиавтоматизированных АТК и ИУС [6]. Конкретные цели структурного ана-лиза во всех случаях заключаются в формализованном получении соответ-ствующих структурных функций (СФ) работоспособности (ФРС), не рабо-тоспособности (НФРС), безопасности (ФБ).
118
Многоагрегатные АТК характеризуются рядом особенностей: нали-чие в их структуре: «переплетающихся» замкнутых контуров, обеспечи-вающих самоподдержание энергетических и технологических процессов;трех типов линий связи между элементами, обеспечивающих передачусигналов (ресурсов) в одну сторону, в обе стороны одновременно или водну сторону с возможностью переключения направления; резервных аг-регатов, вводимых в действие при выходе из строя основных. С позицийтеории надежности такие АТК относятся к системам с так называемой«неприводимой структурой». Поэтому в общем случае задачи полученияСФ и построения ГД многоагрегатных АТК относятся к переборными иимеют комбинаторную сложность.
Предложенный в [6] метод конструирования корректных логико-математических моделей структурно-сложных систем при общепринятыхдопущениях о бинарности состояний работоспособности элементов и не-зависимости их отказов позволил свести задачу структурного анализа кпроблеме регулярного аналитического решения систем логических урав-нений. Разработанный математический аппарат практически реализован всозданном на кафедре «Системный анализ и управление» СПбГПУ про-граммном комплексе «Структурный анализ и управление надежностью,безопасностью и живучести» (ПК «САиУ НБ»), который предназначен дляпринятия обоснованных проектных решений на основе методически отра-ботанной при разработке крупных управляющих систем для широкогокласса потенциально-опасных АТК системы критериев [2, 3, 4].
Предложенная система критериев включает не только традиционныевероятностные, но и детерминированные критерии, обеспечивающиеоценку структурной устойчивости и безопасности АТК:
показатель отказоустойчивости (отказобезопасности) d – мак-симальное число элементов АТК, отказ которых в любом соче-тании не приведет к потере работоспособности (переходу вопасное состояние);
показатель отказоустойчивости (отказобезопасности) m – мак-симальное число элементов АТК, отказ которых может не при-вести к потере работоспособности (переходу в опасное со-стояние);

119
показатель отказоустойчивости (отказобезопасности) V – доляработоспособных (безопасных) состояний системы в общемколичестве состояний АТК;
совокупность коэффициентов отказоустойчивости (отказобе-
зопасности) для отказов k -ой кратности равен 1 kk k
N
MGC
, где
kM – количество неработоспособных (небезопасных) состоя-ний системы с отказами k -ой кратности, N – количество эле-ментов в системе;
нормированный вес i-ого элемента в структуре АТК iv – коэф-фициент сокращения количества работоспособных (безопас-ных) состояния АТК в случае отказа i-ого элемента.
Требования к отказоустойчивости и отказобезопасности АТК в от-личие от требований к другим типам показателей должны выполняться непо вероятности (не в среднем для генеральной совокупности систем), а де-терминировано для каждой конкретной системы вне зависимости от ха-рактеристик безотказности и долговечности элементов аппаратуры. Дан-ное требование должно подтверждаться не статистическими испытаниями,а прямой имитацией единичных нарушений в функционировании реаль-ной системы при ее стендовых испытаниях с моделями объектовуправления.
На рис. 1 продемонстрированы рабочие окна ПК «САиУ НБЖ», накоторых вводится информация о структуре АТК, выводятся минимальныерабочие конфигурации (МРК), минимальные сечения отказов (МСО),синтезированная структура с заданным уровнем d-отказоустойчивости, атакже результаты расчета приведенных выше детерминированныхпоказателей структурной устойчивости и результат работыалгоритма реконфигурации структуры АТК при произвольных отказахэлементов.
ПК выполняет расчеты вероятностных показателей функциональнойэффективности, системной надежности, риска нарушения условий безо-пасности, потерь от ненадёжности, в том числе расчет условных вероятно-стей сохранения работоспособности и безопасности при отказах сверхкри-тических значений.

120
Рис. 1. Внешний вид окон ПК «САиУ НБЖ»
Созданный программный комплекс «СА и У НБЖ» обеспечиваетрешение на уровне Главного конструктора проекта следующих задач:
1. выявление всего множества возможных комбинаций отказов эле-ментов минимальной кратности, приводящих к потере работоспособностиАТК и к нарушению условий его безопасности, включая проверку выпол-нимости детерминированных требований НТД и ТЗ к функционированиюТК при максимальных проектных авариях и критерия «терпимости» к от-казам заданной кратности;

121
2. выявление всего множества наборов из минимальной числа работо-способных элементов – минимальных рабочих конфигураций, обеспечиваю-щих выполнение АТК своего назначения и безопасного функционирования;
3. сравнение по детерминированным критериям отказоустойчивости,отказобезопасности вариантов функционально-топологических структурАТК с различной степенью централизации управления, а также синтез набазе найденных МРК всех возможных вариантов структур, обеспечиваю-щих заданные требования к d-отказоустойчивости и d-отказобезопасности;
4. выработка решений по реконфигурации структуры АТК при лю-бых заранее не предсказуемых комбинациях отказов элементов (реализа-ция принципа «самоорганизации» и «самоалгоритмизации» АТК).
Литература:
1. ГОСТ 19175-85. Системы управления техническими средствамикорабля. Термины и определения.
2. Симаков И. П. Критерии безопасности, живучести и эффективно-сти управления и последовательный синтез организации управляющихсистем. - в сб.: Материалы IX Всесоюзного совещания по проблемамуправления. - М.: Наука, 1983.
3. Волик Б. Г., Буянов Б. Б., Лубков Н. В., Максимов В. И.,Степанянц А. С. Методы анализа и синтеза структур управляющих систем.– М.: Энергоатомиздат, 1988.
4. Астров В. В., Симаков И. П. Проблемные задачи развития теориии методов проектирования структур многофункциональных систем управ-ления комплексами технических средств судов. – Судостроительная про-мышленность, серия «Автоматика и телемеханика», 6, 1988.
5. Астров В. В., Войтецкий В. В., Симаков И. П. Теоретико-методологические основы и современные принципы построения управ-ляющих систем повышенной надёжности и живучести для объектов атом-ной энергетики. – В сборнике материалов семинара секции динамики НТС№ 1 Минатома России, 1998 г.
6. Холодных П. В. Логико-математическая модель структурно-сложной технической системы и ее применение. // Научно-техническиеведомости. – 2011.– № 2.– С. 151–156.
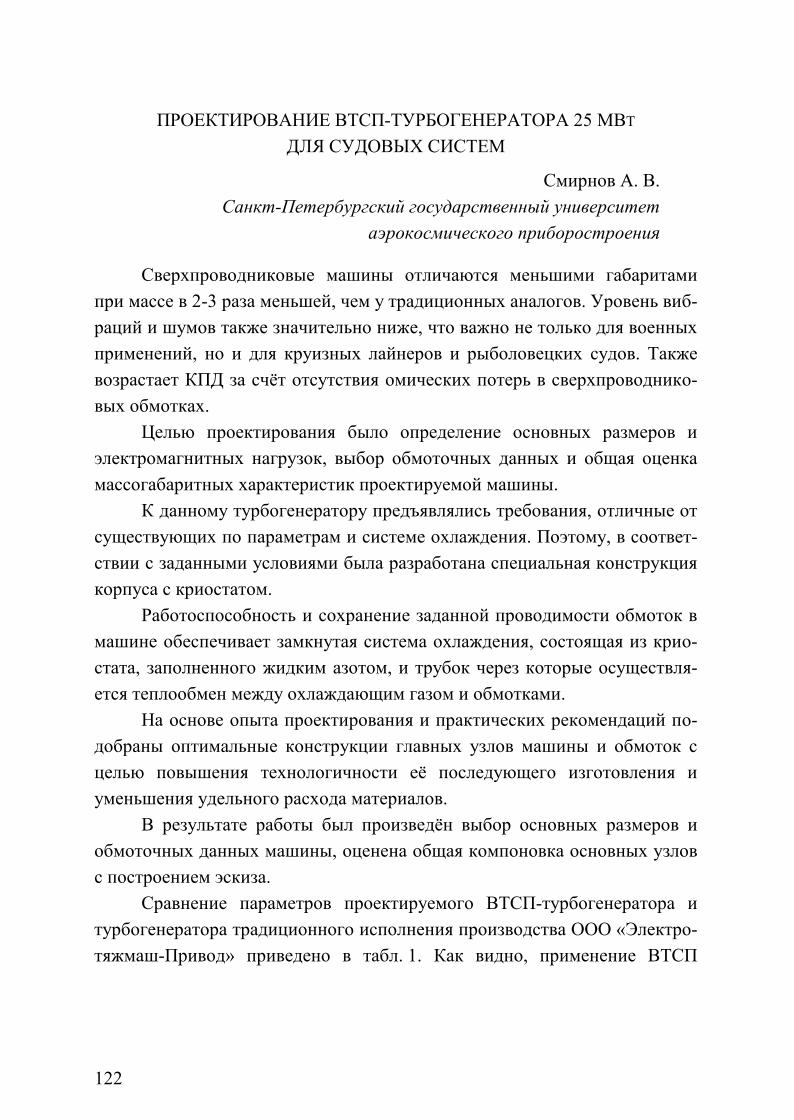
122
ПРОЕКТИРОВАНИЕ ВТСП-ТУРБОГЕНЕРАТОРА 25 МВТ
ДЛЯ СУДОВЫХ СИСТЕМ
Смирнов А. В.Санкт-Петербургский государственный университет
аэрокосмического приборостроения
Сверхпроводниковые машины отличаются меньшими габаритамипри массе в 2-3 раза меньшей, чем у традиционных аналогов. Уровень виб-раций и шумов также значительно ниже, что важно не только для военныхприменений, но и для круизных лайнеров и рыболовецких судов. Такжевозрастает КПД за счёт отсутствия омических потерь в сверхпроводнико-вых обмотках.
Целью проектирования было определение основных размеров иэлектромагнитных нагрузок, выбор обмоточных данных и общая оценкамассогабаритных характеристик проектируемой машины.
К данному турбогенератору предъявлялись требования, отличные отсуществующих по параметрам и системе охлаждения. Поэтому, в соответ-ствии с заданными условиями была разработана специальная конструкциякорпуса с криостатом.
Работоспособность и сохранение заданной проводимости обмоток вмашине обеспечивает замкнутая система охлаждения, состоящая из крио-стата, заполненного жидким азотом, и трубок через которые осуществля-ется теплообмен между охлаждающим газом и обмотками.
На основе опыта проектирования и практических рекомендаций по-добраны оптимальные конструкции главных узлов машины и обмоток сцелью повышения технологичности её последующего изготовления иуменьшения удельного расхода материалов.
В результате работы был произведён выбор основных размеров иобмоточных данных машины, оценена общая компоновка основных узловс построением эскиза.
Сравнение параметров проектируемого ВТСП-турбогенератора итурбогенератора традиционного исполнения производства ООО «Электро-тяжмаш-Привод» приведено в табл. 1. Как видно, применение ВТСП

123
позволяет уменьшить массу машины на 32 т при практически равномКПД. Эскиз конструкции представлен на рис. 1.
Таблица 1Сравнение параметров ВТСП-генератора и
генератора традиционного исполненияТ-25-2З У3-ГООО «Электротяжмаш-Привод»
Тип турбо-генератора
Мощ-ность,МВт
Напряжение,
кВ
Частота
вращения,об/мин
КПД,
%
Масса,
т
Т-25-2З У3-Г 25 6,3 3000 98 87
ВТСП 25 6,3 3000 97,45 55
Рис. 1. Эскиз ВТСП-турбогенератора 25 МВт
Литература:
1. Хуторецкий Г. М., Токов М. И., Толвинская Е. В. Проектированиетурбогенераторов, Л., Энергоатомиздат, 1987.
2. Извеков В. И., Серихин Н. А., Абрамов А. И. Проектирование тур-богенераторов, М., МЭИ, 2005.

124
ВЕТРОГЕНЕРАТОРЫ С АКСИАЛЬНЫММАГНИТНЫМ ПОТОКОМ И
ПОСТОЯННЫМИ МАГНИТАМИ
Тимофеев С. С.Санкт-Петербургский государственный
университет аэрокосмического приборостроения
В настоящее время большое внимание уделяется нетрадиционнымисточникам энергии. На территории близко расположенных к морю, а так-же на плавучих установках наиболее целесообразно использовать ветро-вые установки с синхронными многодисковыми генераторами с возбуж-дением на редкоземельных постоянных магнитах или высокотемператур-ных сверхпроводниковых массивах. Ветроэнергетическая установка можетиметь вертикальное исполнение, что позволит быть независимым от на-правления ветра. Синхронный генератор данной установки также можетиметь вертикальное исполнение с большим количеством полюсов на рото-рах, которые позволяют работать на номинальном режиме при низких ско-ростях ветра. По энергетическим параметрам многодисковые ветрогенера-торы превосходят существующие генераторы традиционного исполнения.
На сегодняшний день существует много материалов, используемыхпри изготовлении постоянных магнитов. Альнико, ферриты (керамика),самарий - кобальт, неодим – железо - бор, железо – хром - кобальт и мате-риалы в виде смеси магнитного порошка и какой либо связующей компо-ненты. В качестве связующего материала могут выступать каучук, пластики материалы на базе эпоксидной смолы. Основные преимущества каждогоиз вышеперечисленных материалов являются: температурная стабиль-ность, значение магнитной энергии, величина магнитной индукции на по-верхности магнита. Наиболее предпочтительно использовать SmCo илиNdFeB [1, 2].
Современные этапы развития электромашиностроения характеризу-ются значительным ростом использования активного объема машин. Дляобеспечения устойчивой работы и надежности вновь создаваемыхмагнитоэлектрических машин, необходимо учитывать факторы, которыеранее не рассматривались при расчете данных машин [3].

125
Рассмотрим вариант машины с аксиальным магнитным потоком(рис. 2). В данном случае мы имеем трехфазную синхронную многодиско-вую машину, состоящую из дискового статора и ротора. Статор выполненпо беспазовой конструкции с сердечником из аморфного сплава и распо-ложенными по периметру катушками статора. Сами катушки имеют круг-лую форму и установлены в два слоя. Ротор рассматриваемой машины со-стоит из алюминиевого диска с расположенными на нем магнитами изредкоземельных металлов (Nd-Fe-B), которые создают основное магнит-ное поле (рис. 1).
Рис. 1. Поле возбуждениямногодискового двигателя Рис. 2. Дисковый двигатель
Естественно, что все рассматриваемые поля являются трехмерными,однако приближенные решения могут быть выполнены с достаточной точ-ностью, сведя задачу к двухмерной и, соответственно, не учитывая изме-нения поля в одном направлении. Распределение поля возбуждения от по-стоянных магнитов в воздушном зазоре приближенно можно определить,рассматривая поле в развернутой дисковой машине, перпендикулярно осивращения. Поле в торцевой зоне можно определить, анализируя поле вторцевой плоскости.
Электромагнитные процессы в электрических машинах описывают-ся системой уравнения Максвелла [4].
L Q
SdQHdl ; ;
QL
BdQt
Edl
эта система уравнений описывает связь между изменениями электрическо-го и магнитных полей. Причем учитывается плотность тока проводимости,

126
смещения, переноса. Для дискового синхронного двигателя, имеющегопоследовательные участки с различной магнитной проницаемостью по ко-торому проходит постоянный магнитный поток, магнитное поле будет оп-ределяться
00
M M
BL
.
Основным видом нелинейной среды в электрических машинах яв-ляются ферромагнитные участки магнитной цепи и остальные конструк-тивные элементы, для которых связь между индукцией и напряженностьюмагнитного поля выражаются зависимостью:
,)()( HHHBB
остальными нелинейностями в рассматриваемом диапазоне частот можнопренебречь.
Литература:
1. Андреев Е. Н., Вандюк Н. Ю., Тимофеев С. С., Чубраева Л. И.Многодисковые криогенные синхронные двигатели с ВТСП массивами ипостоянными магнитами // 2 я Международная конференция «Фундамен-тальные проблемы высокотемпературной сверхпроводимости (ФПС’06)».Сб. трудов конф. М.: ФИАН, 2006.
2. Андреев Е. Н. Волков Д. А. Волынкин И. В. Коротков Д. А. Ман-зук М. В. Тимофеев С. С. Чубраева Л. И. Опыт создания и перспективыприменения многодисковых синхронных двигателей с аксиальным маг-нитным потоком // Сборник трудов III Международной научно-технической конференции «Электромеханические и электромагнитныепреобразователи энергии и управляемые электромеханические системы».Екатеринбург: УГТУ-УПИ, 2007.
3. Бинс К., Лауренсон П. Анализ и расчет электрических и магнит-ных полей. М.: Энергия, 1970.
4. Брынский Е. А. и др. Электромагнитные поля в электрическихмашинах. Л.: Энергия, 1979.
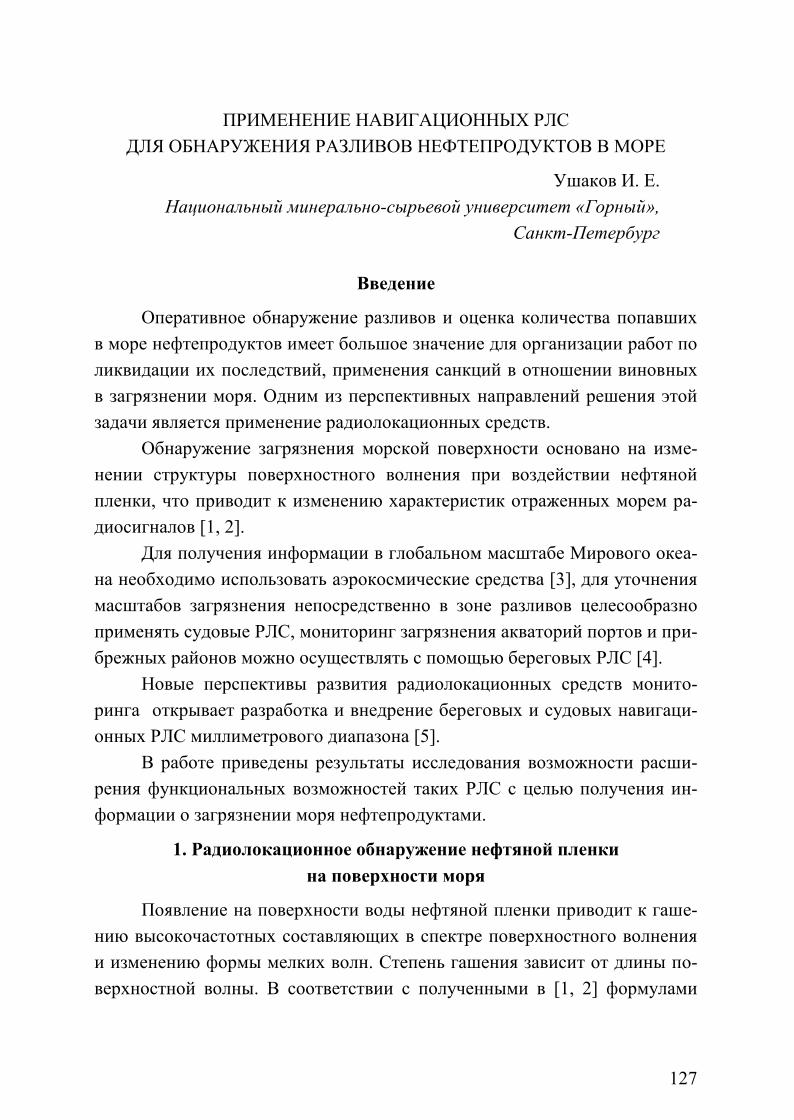
127
ПРИМЕНЕНИЕ НАВИГАЦИОННЫХ РЛСДЛЯ ОБНАРУЖЕНИЯ РАЗЛИВОВ НЕФТЕПРОДУКТОВ В МОРЕ
Ушаков И. Е.Национальный минерально-сырьевой университет «Горный»,
Санкт-Петербург
Введение
Оперативное обнаружение разливов и оценка количества попавшихв море нефтепродуктов имеет большое значение для организации работ поликвидации их последствий, применения санкций в отношении виновныхв загрязнении моря. Одним из перспективных направлений решения этойзадачи является применение радиолокационных средств.
Обнаружение загрязнения морской поверхности основано на изме-нении структуры поверхностного волнения при воздействии нефтянойпленки, что приводит к изменению характеристик отраженных морем ра-диосигналов [1, 2].
Для получения информации в глобальном масштабе Мирового океа-на необходимо использовать аэрокосмические средства [3], для уточнениямасштабов загрязнения непосредственно в зоне разливов целесообразноприменять судовые РЛС, мониторинг загрязнения акваторий портов и при-брежных районов можно осуществлять с помощью береговых РЛС [4].
Новые перспективы развития радиолокационных средств монито-ринга открывает разработка и внедрение береговых и судовых навигаци-онных РЛС миллиметрового диапазона [5].
В работе приведены результаты исследования возможности расши-рения функциональных возможностей таких РЛС с целью получения ин-формации о загрязнении моря нефтепродуктами.
1. Радиолокационное обнаружение нефтяной пленкина поверхности моря
Появление на поверхности воды нефтяной пленки приводит к гаше-нию высокочастотных составляющих в спектре поверхностного волненияи изменению формы мелких волн. Степень гашения зависит от длины по-верхностной волны. В соответствии с полученными в [1, 2] формулами

128
отношение hг/h, где hг и h – высоты волн соответственно для покрытогонефтяной пленкой и чистого участков поверхности моря, составляет около
90 % для поверхностных волн длиной Λ ≈ 30 см и уменьшается до
(15-30) % при Λ ≈ 5 см.
Рассеяние радиоволн морской поверхностью при углах падения бо-лее 30 градусов носит избирательный характер. Сигнал в обратном на-правлении формируется за счет рассеяния на составляющих поверхност-ного волнения, длина которых соизмерима с длиной волны облучаемогополя и удовлетворяет условию пространственного резонанса. Интенсив-ность обратного рассеяния в этом случае пропорциональна квадрату высо-ты резонансной составляющей Λо поверхностного волнения
P ~ h2(Λo) . (1)
Наблюдаемость нефтяной пленки на морской поверхности характе-ризуется контрастом участков со сглаженным волнением по отношению кчистой поверхности
Кр = Р/Pг = (h/hг)2.
Выразив контраст в децибелах, получаем
Кр = 20 lg (h/hг) . (2)
Расчет по формуле (2) показывает, что контраст быстро уменьшаетсяпри увеличении длины резонансной волны. Например, при Λо ≥ 15 см кон-траст не превосходит единиц децибел, при Λо = 5 см он составляет(10…16) дБ, а при Λо = 1 см увеличивается до (34…40) дБ.
Полученные значения контраста хорошо согласуются с результатамиэкспериментальных исследований в натурных условиях [6].
Таким образом, для увеличения контраста нефтяной пленки на мор-ской поверхности необходимо уменьшать длину волны РЛС. В связи сэтим представляется целесообразным использование для этих целей РЛСмиллиметрового диапазона волн.
2. Общая характеристика системы
Система отображения и документирования информации о загрязне-нии поверхности моря нефтепродуктами должна обеспечивать:

129
- выделение и отображение на экране персонального компьютера(ПК) участков морской поверхности, покрытых нефтяной пленкой;
- определение направления и минимального расстояния до загряз-ненного участка;
- определение продольного и поперечного размеров пятна, направ-ления и расстояния до его центра, площади пятна;
- вывод на экран указанных параметров нефтяного пятна;- формирование при обнаружении нефтяных загрязнений файлов
данных, содержащих информацию о времени их формирования и пара-метрах нефтяного пятна;
- вывод этой информации на печать, формирование архива обнару-женных нефтяных пятен.
Результаты экспериментальных исследований [7] показали перспек-тивность использования такой системы для обнаружения пятен нефтепро-дуктов на морской поверхности.
Заключение
Разработаны алгоритмы и программное обеспечение решения задачипостроения системы отображения и документирования информации о за-грязнении поверхности моря нефтепродуктами на базе береговых и судо-вых навигационных РЛС. Практическая реализация расширения функцио-нальных возможностей РЛС обеспечивается установкой пакета приклад-ных программ обработки сигналов и отображения информации.
После проведения испытаний возможна поставка навигационныхРЛС миллиметрового диапазона с расширенными функциональными воз-можностями. Применение таких РЛС будет способствовать оперативномуобнаружению загрязнений моря нефтепродуктами, рациональной органи-зации работ по ликвидации последствий аварийных и несанкционирован-ных разливов нефти в море, а также решению спорных вопросов по иско-вым заявлениям о возмещении ущерба, нанесенного природной среде.
Литература:
1. Shishkin I. F., Ushakov I. E. Radar method of the measuring the degreeof the ocean oil product pollution // Proc. of the First Symposium of theIMEKO – TC8, 9-11 september 1981, 1981, p. 354-367.

130
2. Ушаков И. Е., Шишкин И. Ф. Радиолокационное зондированиеморской поверхности. –М.: РИЦ «Татьянин день», 1997, -264 с.
3. Иванов А. Ю. Слики и плёночные образования на космическихрадиолокационных изображениях // Исследование Земли из космоса. 2007.№ 3. С. 73-96.
4. Ничипоренко Н. Т., Маренич И. Е., Петров А. В., Ушаков И. Е.,Шишкин И. Ф. Обнаружение разливов нефтепродуктов в море радиолокаци-онными средствами // Научные доклады 4 Международной конференции«Экология и развитие Северо-Запада России». – СПб. 1999. С. 332-339.
5. Береговая РЛС миллиметрового диапазона «Балтика – Б». – СПб.:ЗАО «Морские комплексы и системы», 1996.
6. Галаев Ю. М., Калмыков А. И., Курекин А. С. и др. Радиолокаци-онное обнаружение нефтяных загрязнений морской поверхности // Извес-тия АН СССР – Физика атмосферы и океана. 1977, т. 13, № 4. С. 406-414.
7. Ничипоренко Н. Т., Маренич И. Е., Петров А. В., Мисюченко И.,Трофимов С. Б., Ушаков И. Е. Обнаружение разливов нефтепродуктов сиспользованием навигационной РЛС // Судостроение. 2010, № 2. С. 39-41.
РАЗРАБОТКА АВТОМАТИЗИРОВАННЫХМЕТОДОВ ВЫДЕЛЕНИЯ НЕФТЯНЫХ ПЯТЕН
НА РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЯХМОРСКОЙ ПОВЕРХНОСТИ
Ушаков И. Е.Национальный минерально-сырьевой университет
«Горный», Санкт-Петербург
Появление на поверхности воды пленки нефтепродуктов приводит кизменению формы мелких волн и гашению высокочастотных составляю-щих в спектре поверхностного волнения [1, 2], что вызывает изменениеуровня отраженных радиолокационных сигналов. Область выглаживанияряби на поверхности моря называют сликом (от англ. slick - гладкий,блестящий).
При создании радиолокационных средств обнаружения нефтяныхразливов на морской поверхности одна из основных задач состоит в
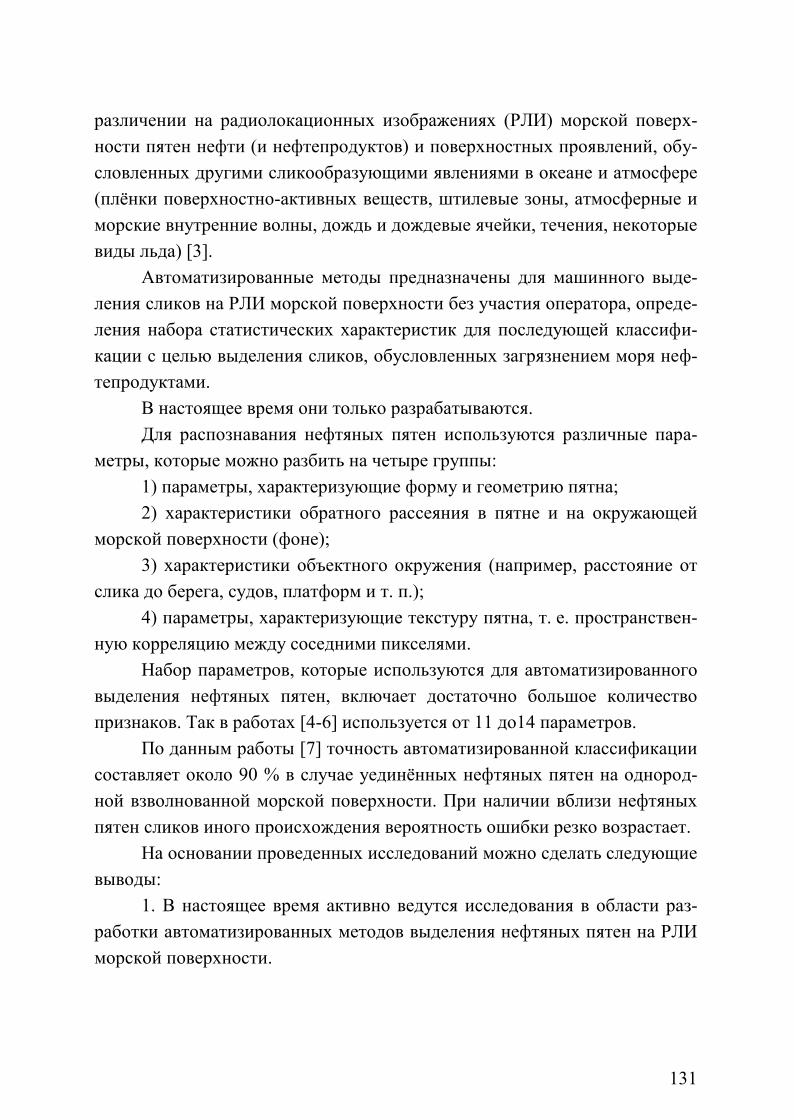
131
различении на радиолокационных изображениях (РЛИ) морской поверх-ности пятен нефти (и нефтепродуктов) и поверхностных проявлений, обу-словленных другими сликообразующими явлениями в океане и атмосфере(плёнки поверхностно-активных веществ, штилевые зоны, атмосферные иморские внутренние волны, дождь и дождевые ячейки, течения, некоторыевиды льда) [3].
Автоматизированные методы предназначены для машинного выде-ления сликов на РЛИ морской поверхности без участия оператора, опреде-ления набора статистических характеристик для последующей классифи-кации с целью выделения сликов, обусловленных загрязнением моря неф-тепродуктами.
В настоящее время они только разрабатываются.Для распознавания нефтяных пятен используются различные пара-
метры, которые можно разбить на четыре группы:1) параметры, характеризующие форму и геометрию пятна;2) характеристики обратного рассеяния в пятне и на окружающей
морской поверхности (фоне);3) характеристики объектного окружения (например, расстояние от
слика до берега, судов, платформ и т. п.);4) параметры, характеризующие текстуру пятна, т. е. пространствен-
ную корреляцию между соседними пикселями.Набор параметров, которые используются для автоматизированного
выделения нефтяных пятен, включает достаточно большое количествопризнаков. Так в работах [4-6] используется от 11 до14 параметров.
По данным работы [7] точность автоматизированной классификациисоставляет около 90 % в случае уединённых нефтяных пятен на однород-ной взволнованной морской поверхности. При наличии вблизи нефтяныхпятен сликов иного происхождения вероятность ошибки резко возрастает.
На основании проведенных исследований можно сделать следующиевыводы:
1. В настоящее время активно ведутся исследования в области раз-работки автоматизированных методов выделения нефтяных пятен на РЛИморской поверхности.
132
2. В известных методах используется большое количество парамет-ров (как правило, не меньше десяти).
3. Известные методы дают хорошие результаты в случае уединённыхнефтяных пятен на однородной взволнованной поверхности моря, однакопри наличии вблизи нефтяных пятен сликов, обусловленных другими при-чинами (например, ветровым затишьем или ветровой тенью), вероятностьошибок резко возрастает.
4. В известных методах для классификации сликов используютсяоценки статистических характеристик обратного рассеяния: среднего зна-чения (первый начальный момент), дисперсии (второй центральный мо-мент).
5. Проведенные оценки показывают целесообразность использова-ния для автоматического выделения нефтяных пятен оценок статистиче-ских характеристик более высокого порядка, а именно: третьего централь-ного момента (характеризует симметричности закона распределения), чет-вертого центрального момента (характеризует заострённость вершины за-кона распределения).
Литература:
1. Ушаков И. Е., Шишкин И. Ф. Радиолокационное зондированиеморской поверхности. –М.: РИЦ «Татьянин день», 1997, -264 с.
2. Ничипоренко Н. Т., Маренич И. Е., Петров А. В., Ушаков И. Е.,Шишкин И. Ф. Обнаружение разливов нефтепродуктов в море радиолокаци-онными средствами // Научные доклады 4 Международной конференции«Экология и развитие Северо-Запада России». – СПб. 1999. С. 332-339.
3. Иванов А. Ю. Слики и плёночные образования на космическихрадиолокационных изображениях // Исследование Земли из космоса. 2007.№ 3. С. 73-96.
4. Frate F. D., Petrocchi A., Lichtenegger J., Calabresi G. Neural net-works for oil spill detection using ERS-SAR data // IEEE Trans. Geosci. Rem.Sens. 2000. № 38(5). P. 2282-2287.
5. Solberg A. N. S., Storvik G., Solderg R., Volden E. Automatic detec-tion of oil spills in ERS SAR images // IEEE Trans. Geosci. Rem. Sens. 1999.№ 37(4). P. 1916-1924.

133
6. Fiscella B., Giancaspro A., Nirscio F., et al. Oil spill detection usingmarine SAR images // Int. J. Rem. Sens. 2000. № 21(18). P. 3561-3566.
7. Brekke C., Solberg A. N. S. Oil spill detection by satellite remote sens-ing // Rem. Sens. Environ. 2005. № 95. P. 1-13.
ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ВОЗДУШНОЙ ЛИНИИ
Федотов А. И., Абдуллазянов Р. Э., Вагапов Г. В.Казанский государственный
энергетический университет
Частотные характеристики (ЧХ) электрических машин используютсякак для анализа режимов их работы, так и для выявления возникающихдефектов. Для воздушных линий (ВЛ) электропередачи распределитель-ных электрических сетей (РЭС) напряжением 6-10 кВ также перспективноих применение, поскольку источник высших гармоник создается естест-венным образом – перемежающейся дугой при наличии повреждения. Не-обходимы исследования относительно вида ЧХ в различных условиях ра-боты электропередачи, поскольку применительно к РЭС таковые практи-чески не проводились.
Для высших гармоник (ВГ) частотой более 10 кГц уже неприемлемопредставлять ВЛ классической П-образной схемой замещения с сосредо-точенными параметрами, а следует применять теорию длинных линий.Перспектива использования ЧХ заключается в том, что можно воспользо-ваться таким волновым свойством дальней электропередачи, как много-кратное увеличение напряжения на её конце при длине электропередачи,равной четверти волны. Т. е. следует ожидать «резонансное» увеличениесоответствующих гармоник на фоне обычного частотного спектра, что по-зволяет связать значение этой частоты с расстоянием до места нахожденияисточника ВГ. Причем выделить «резонансную» частоту можно на сторо-не 0,4 кВ понижающей подстанции, что принципиально важно, так какобщепринятым является отсутствие высоковольтных измерительныхтрансформаторов тока и напряжения на подстанциях 10/0,4 кВ.
Рассмотрим принципиальную схему трехфазной электропередачи,представленной на рис. 1, где источник напряжения e(n) имеет в общем
134
случае произвольную частоту кратности n по отношению к промышленнойчастоте. На конце ВЛ подключен виртуальный вольтметр, с помощью ко-торого обеспечивается снятие ЧХ. На высоких частотах пренебрежемвлиянием активных сопротивлений на частоту, соответствующую макси-муму напряжения на конце электропередачи. Внутреннее сопротивлениеисточника ВГ учтено индуктивностью Le = 0,01 Гн.
Рис. 1. Принципиальная схема электропередачи 6-10 кВ
В целях проверки выдвинутой гипотезы о возможности использова-ния уровня ВГ для связи частоты с расстоянием до места поврежденияприменительно к рассматриваемой электропередаче, рис. 1, выполнена еёмодель в пакете Simulink, где ВЛ была представлена как линия с распреде-ленными параметрами. На рис. 2 приведена полученная частотная харак-теристика с явно выраженным «резонансным» пиком на частоте 1895 Гц.Сравнение с теоретически рассчитанной частотой показало отличие менее1,6 %.
Рис. 2. Частотная характеристика электропередачи
e(n) lV
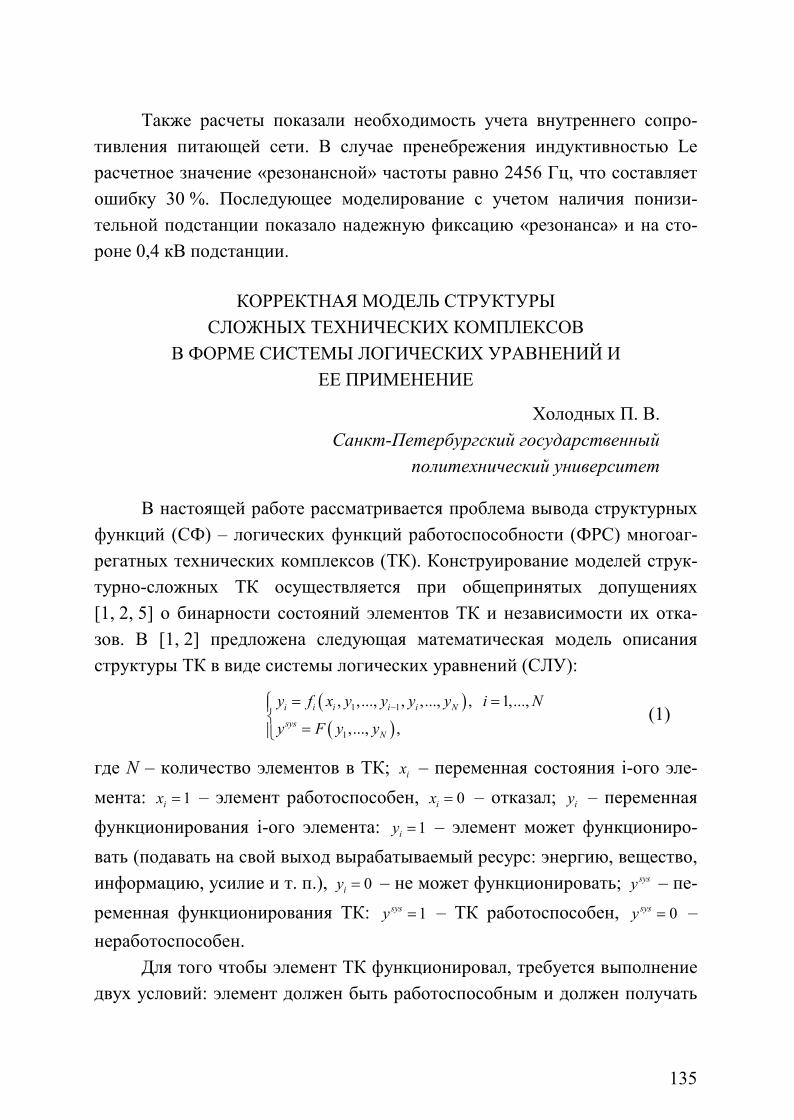
135
Также расчеты показали необходимость учета внутреннего сопро-тивления питающей сети. В случае пренебрежения индуктивностью Leрасчетное значение «резонансной» частоты равно 2456 Гц, что составляетошибку 30 %. Последующее моделирование с учетом наличия понизи-тельной подстанции показало надежную фиксацию «резонанса» и на сто-роне 0,4 кВ подстанции.
КОРРЕКТНАЯ МОДЕЛЬ СТРУКТУРЫСЛОЖНЫХ ТЕХНИЧЕСКИХ КОМПЛЕКСОВ
В ФОРМЕ СИСТЕМЫ ЛОГИЧЕСКИХ УРАВНЕНИЙ ИЕЕ ПРИМЕНЕНИЕ
Холодных П. В.Санкт-Петербургский государственный
политехнический университет
В настоящей работе рассматривается проблема вывода структурныхфункций (СФ) – логических функций работоспособности (ФРС) многоаг-регатных технических комплексов (ТК). Конструирование моделей струк-турно-сложных ТК осуществляется при общепринятых допущениях[1, 2, 5] о бинарности состояний элементов ТК и независимости их отка-зов. В [1, 2] предложена следующая математическая модель описанияструктуры ТК в виде системы логических уравнений (СЛУ):
1 1
1
, ,..., , ,..., , 1,...,
,..., ,i i i i i N
sysN
y f x y y y y i N
y F y y
(1)
где N – количество элементов в ТК; ix – переменная состояния i-ого эле-мента: 1ix – элемент работоспособен, 0ix – отказал; iy – переменнаяфункционирования i-ого элемента: 1iy – элемент может функциониро-вать (подавать на свой выход вырабатываемый ресурс: энергию, вещество,информацию, усилие и т. п.), 0iy – не может функционировать; sysy – пе-ременная функционирования ТК: 1sysy – ТК работоспособен, 0sysy –неработоспособен.
Для того чтобы элемент ТК функционировал, требуется выполнениедвух условий: элемент должен быть работоспособным и должен получать
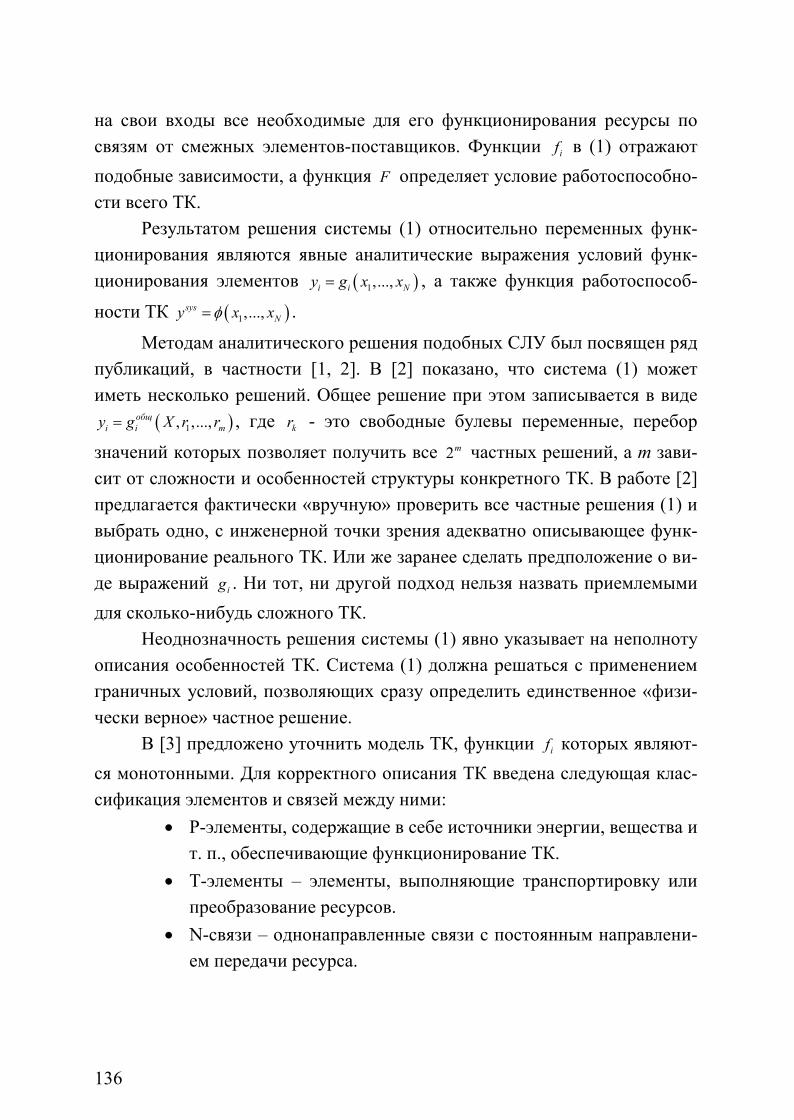
136
на свои входы все необходимые для его функционирования ресурсы посвязям от смежных элементов-поставщиков. Функции if в (1) отражаютподобные зависимости, а функция F определяет условие работоспособно-сти всего ТК.
Результатом решения системы (1) относительно переменных функ-ционирования являются явные аналитические выражения условий функ-ционирования элементов 1,...,i i Ny g x x , а также функция работоспособ-
ности ТК 1,...,sys
Ny x x .
Методам аналитического решения подобных СЛУ был посвящен рядпубликаций, в частности [1, 2]. В [2] показано, что система (1) можетиметь несколько решений. Общее решение при этом записывается в виде
1, ,...,общi i my g X r r , где kr - это свободные булевы переменные, перебор
значений которых позволяет получить все m2 частных решений, а m зави-сит от сложности и особенностей структуры конкретного ТК. В работе [2]предлагается фактически «вручную» проверить все частные решения (1) ивыбрать одно, с инженерной точки зрения адекватно описывающее функ-ционирование реального ТК. Или же заранее сделать предположение о ви-де выражений ig . Ни тот, ни другой подход нельзя назвать приемлемымидля сколько-нибудь сложного ТК.
Неоднозначность решения системы (1) явно указывает на неполнотуописания особенностей ТК. Система (1) должна решаться с применениемграничных условий, позволяющих сразу определить единственное «физи-чески верное» частное решение.
В [3] предложено уточнить модель ТК, функции if которых являют-ся монотонными. Для корректного описания ТК введена следующая клас-сификация элементов и связей между ними:
P-элементы, содержащие в себе источники энергии, вещества ит. п., обеспечивающие функционирование ТК.
T-элементы – элементы, выполняющие транспортировку илипреобразование ресурсов.
N-связи – однонаправленные связи с постоянным направлени-ем передачи ресурса.
137
J-связи – связи, обеспечивающие передачу ресурса в любуюсторону между двумя элементами, но не в обе стороны одно-временно.
С учетом введенной классификации система (1) представляется вследующем модифицированном (МСЛУ) виде:
(1), (,1)(), (, ),1 1 ,
1
, ,..., , 1,...,
,...,
C C i C N C i Ni i i i i N N
sysN
y f x H y H y i N
y F y y
(2)
где ),(),(,
jiCjCjiH - специальная булева переменная-маркер связи ),( ji ;
{ , }C j P T - класс элемента-поставщика, , { , }C i j N J - класс связи. Зада-
ча переменных-маркеров состоит в том, чтобы ввести в МСЛУ информа-цию о классах элементов и связей. При решении системы (2) переменные-маркеры рассматриваются как обычные булевы переменные, для которыхвводится одно единственное правило, описывающее специфику поведенияJ-связей: 0),(
,),(
, JiCij
JjCji HH .
В качестве промежуточного решения системы (2) используется мак-симально избыточное частное решение 1, ,...,общ
i i my g X r r при
1 2 ... 1mr r r , которое преобразуется к виду МДНФ. Равенство единицепараметров kr позволяет избежать потери части конъюнктов ФРС, соот-ветствующих работоспособным состояниям ТК, а наличие в МСЛУ пере-менных-маркеров позволяет в свою очередь избежать поглощения важныхконъюнктов «физически» необоснованными конъюнктами, присутствую-щими в промежуточном решении.
Частные решения для iy представляется в виде МДНФ
(), (, ), , , ,, C j C i j
i i k i i j i k i kk k
y K x H X H . В [3] приводится формальное правило,
позволяющее проанализировать переменные-маркеры в каждом из конъ-юнктов и убрать из ФРС конъюнкты, не соответствующие принципамфункционирования ТК.
Произведение маркеров ),(),(,
jiCjCjik HH заменяется на 1, если все
элементы, входящие в конфигурацию ТК, описываемую этим конъюнктом,будут напрямую или косвенно получать ресурсы от P-элементов. В про-тивном случае 0kH . Будем говорить, что в kH содержится путь

138
1 1 1 2 2 2
1 1 2 2
(), (, )(), (, )(), (, ), , ,... l l l
l l
C j C i jC j C i j C j C i ji j i j i jL H H H длиной l, если для любого 1,..., 1s l
1 ss ij . Значение kH будет равно 1, если для любого T-маркера ),(,,
jiCTjiH ,
входящего в kH , можно найти хотя бы один путь, завершающийся P-маркером. Иначе конъюнкт 0kK удаляется из ФРС на основании несоот-ветствия принципам работы ТК.
Автором разработан программный комплекс «Struct Solver», реали-зующий рассматриваемый в данной работе метод.
Продемонстрируем работу предложенного метода вывода СФ. Нарисунке представлен внешний вид приложения «Struct Solver» с загружен-ной схемой анализируемого ТК, состоящего из десяти элементов. В этойсхеме P-элементами являются элементы 1, 2, 7 и 8, а все остальные эле-менты имеют класс T. J-связи – связи между элементами 5, 6, 9 и 10, ос-тальные связи имеют класс N.
СЛУ для данной схемы имеет вид: 511 yxy ; 622 yxy ; 133 yxy ;
244 yxy ; 5 5 3 7 9 10y x y y y y ; 6 6 4 8 9 10y x y y y y ; 77 xy ; 88 xy ;
9 9 5 6y x y y ; 10 10 5 6y x y y . Результат решения относительно 5y по [4] с
учетом монотонности СЛУ: 5 1 6,...,y r r = 75xx + 5 6 8 9 10x x x x x +

139
+ 2 4 5 6 9 10 1x x x x x x r + 2965 rxxx + 31065 rxxx + 4531 rxxx + 595 rxx + 6105 rxx . Т. е. получа-
ется 6426 частных решений, из которых требуется выбрать одно «физи-чески» корректное решение.
Модифицированная СЛУ: 5,5,111 yHxy NT ; 6
,6,222 yHxy NT ; 1
,1,333 yHxy NP ;
2,2,444 yHxy NP ; , , , ,
5 5 5,3 3 5,7 7 5,9 9 5,10 10T N P N T J T Jy x H y H y H y H y ;
, , , ,6 6 6,4 4 6,8 8 6,9 9 6,10 10
T N P N T J T Jy x H y H y H y H y ; 77 xy ; 88 xy ; , ,9 9 9,5 5 9,6 6
T J T Jy x H y H y ;
, ,10 10 10,5 5 10,6 6
T J T Jy x H y H y . Промежуточное решение МСЛУ относительно 5y :
5y = NPHxx ,7,575 + NTNPNT HHHxxx ,
5,1,1,3
,3,5531 + NPJTJT HHHxxxx ,
8,6,6,9
,9,59865 + JTJTJT HHHxxxx ,
10,6,6,9
,9,510965 +
+ NPJTJT HHHxxxx ,8,6
,6,10
,10,510865 + JTJTJTJT HHHHxxxx ,
5,9,9,6
,6,10
,10,510965 +
+ NTNPNTJTJT HHHHHxxxxx ,6,2
,2,4
,4,6
,6,9
,9,596542 + NTNPNTJTJT HHHHHxxxxx ,
6,2,2,4
,4,6
,6,10
,10,5106542 .
Конфигурации, описываемые четверным и шестым конъюнктами,являются неработоспособными, так как не содержат в себе ни одного P-элемента и должны быть исключены из итоговой ФРС. Остальные конъ-юнкты описывают работоспособные конфигурации, так как P-элементы,входящие в их состав, обеспечивают функционирование всех входящих вконфигурации элементов. В результате получается единственное и «физи-чески» реализуемое решение: 5y = 5 7x x + 1 3 5x x x + 5 6 8 9x x x x + 5 6 8 10x x x x ++ 2 4 5 6 9x x x x x + 2 4 5 6 10x x x x x . Тем самым предложенный метод позволил исклю-чить перебор 64 частных решений, получаемых методом [2].
Полученное решение является основой для выполнения оценки ка-чества структурной организации ТК по детерминированным и вероятност-ным показателям [4, 5], а также решения задачи синтеза алгоритмов ре-конфигурации структуры при любых заранее непредсказуемых комбина-циях отказов элементов.
Литература:
1. Астров В. В., Симаков И. П., Черкесов Г. Н. Применение методоввероятностной логики и исследования операций к анализу живучести про-странственно-распределенных энергетических систем // Методические во-просы исследования надежности больших систем энергетики. Живучестьсистем энергетики / Под ред. академика АН СССР Руденко Ю. Н. – Ир-кутск: СО АН СССР.– 1979. – С. 49–60.
140
2. Черкесов Г. Н., Степанов Ю. В. Логико-вероятностный анализ на-дежности сложных систем на основе общего решения систем логическихуравнений. // Научно-технические ведомости .– 2003.– № 2. – С. 149–158.
3. Холодных П. В. Логико-математическая модель структурно-сложной технической системы и ее применение. // Научно-техническиеведомости .– 2011.– № 2. – С. 151–156.
4. Рябинин И. А. Надежность и безопасность структурно-сложныхсистем. – СПб: изд-во Санкт-Петербургского университета. - 2007. – 276 с.
5. Симаков И. П., Холодных П. В. Математические модели, форма-лизованные методы и программные средства объективной оценки показа-телей надежности и безопасности структурно-сложных технических сис-тем // Вычислительные, измерительные и управляющие системы. – СПб.:Изд-во Политехн. ун-та, 2009. – С. 130-139.
КАК РАБОТАЕТ ТРАНСФОРМАТОР
Шакиров М. А.Санкт-Петербургский государственный
политехнический университет
Значительное число аварий и выходов трансформаторов (тр-ров) изстроя ставят вопрос о корректности традиционной теории тр-ров с ихТ-образными схемами замещения, не имеющими физического содержания.В [1-3] последовательно объясняется ее ошибочность и разработаны осно-вы абсолютно новой теории тр-ов (АНТТ). Из АНТТ вытекают новыесхемы замещения, в том числе 2Т-образеные, более реально описывающиефизически процессы, включая и динамические при внезапных к. з. АНТТсвязана с новой точкой зрения на работу тр-ра в рабочих режимах, т. е. врежимах от х. х. до номинального и близких к нему. Обычно принцип дей-ствия объясняют применительно к идеализированному тр-ру с стали
(что приводит к равенству м. д. с. обмоток 1 1 2 2w i w i ), высота обмоток рав-на высоте окна тр-ра, их толщиной пренебрегают. Старый принцип сводитпринцип действия к надуманной «застывшей» (т. е. не зависящей отнагрузки) разности м. д. с. обмоток ( 1 0 1 1 2 2w i w i w i ), якобы «необходимой
для создания общего потока 0Ф », также «застойного» в указанном смыс-

141
ле, представляя поток в межобмоточном пространстве как незначительноенедоразумение – «рассеяние», с которым хотя и приходиться считаться, ноне настолько, чтобы уделять ему внимание на векторных диаграммах. Вотличие от старой новая концепция АНТТ опирается на «живые» (т. е.зависящие от нагрузки) м. д. с. обмоток 1 1 2 2,w i w i , совместно создающие
также «живой» поток Ф в межобмоточном пространстве с «живой» на-
пряженностью H , которая, изменяясь с нагрузкой, определяет передавае-
мую мощность из одной обмотки в другую. Таким образом, новая Физиче-ская несостоятельность понятия «общий поток» доказывается в [3] обна-ружением разности фаз между реальными потоками в стержне ( 1Ф ) и
боковом ярме ( 2Ф ) броневого трансформатора как непременного условиемпередачи мощности от одной обмотки в другую. Новая концепция отвеча-ет идее двукратного преобразования подводимой к трансформатору энер-гии, вначале электрической в магнитную, ее трансфигурации и последую-щего преобразования магнитной в электрическую.
Литература:
1. Шакиров М. А. Анализ неравномерности распределения магнит-ных нагрузок и потерь в трансформаторах на основе магнитоэлектриче-ских схем замещения. Электричество 2005, № 11.
2. Шакиров М. А. 2Т-образные схемы замещения трансформаторов.Электричество, 2010, № 5.
3. Шакиров М. А. Теоретические основы электротехники. Тензоры вТОЭ. Электродинамика. Теория относительности. СПб.: Изд-во Политехн.Ун-та, 2011.

142
УКАЗАТЕЛЬУЧАСТНИКОВ КОНФЕРЕНЦИИ
СЕКЦИЯ 3
Энергетика, машиностроение, механика и процессы управления…….4ПРОБЛЕМЫ ВЫПОЛНЕНИЯ ПРОЕКТНЫХ РАБОТ В СВЯЗИ С РЕФОРМИРОВАНИЕМ
ЭЛЕКТРОЭНЕРГЕТИКИ
АБДУЛЛАЗЯНОВ Э. Ю., МИТРОФАНОВ А. Д. ....................................................................................... 4
ЗАЩИТА ОТ КОРРОЗИИ КАБЕЛЬНЫХ ЛИНИЙ 6 – 10 – 35 - 110 КВ
БАРИНОВ В. М. .................................................................................................................................... 6
ЛОКАЛИЗАЦИЯ МЕТОДА МОРФОЛОГИЧЕСКОГО СИНТЕЗА СТРУКТУРЫСИСТЕМЫ УПРАВЛЕНИЯ
БЕЛОВ В. С., БЕЛОВ М. В. ................................................................................................................... 8
ОПРЕДЕЛЕНИЕ АНАЛИТИЧЕСКИХ ЗАВИСИМОСТЕЙ ДЛЯ АКТИВНЫХМОЩНОСТЕЙ ПРИ ИЗМЕНЕНИИ ПАРАМЕТРА СХЕМЫ
БЕЛЯЕВ Н. А., КОРОВКИН Н. В., ЧУДНЫЙ В. С., ФРОЛОВ О. В. ....................................................... 13
ПРИМЕНЕНИЕ НОВЫХ ТЕХНИЧЕСКИХ РЕШЕНИЙ ДЛЯ ПОВЫШЕНИЯЭНЕРГОНАПРЯЖЕННОСТИ АТОМНЫХ ЭНЕРГЕТИЧЕСКИХ УСТАНОВОК
БОЛТЕНКО Э. А., КОМОВ А. Т, ВАРАВА А. Н., ДЕДОВ А. В., ЗАХАРЕНКОВ А. В., ИЛЬИН А. В. ...... 14
КОМБИНИРОВАННАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА НА ВОЗОБНОВЛЯЕМЫХИСТОЧНИКАХ ЭНЕРГИИ
БЫЛЕЕВ А. С. ..................................................................................................................................... 19
СИСТЕМЫ ТЕМПЕРАТУРНОГО МОНИТОРИНГА ЭЛЕКТРИЧЕСКИХ КАБЕЛЕЙ.ПОКАЗАТЕЛИ ЭНЕРГОЭФФЕКТИВНОСТИ
ВАЛОВ П. Г. ....................................................................................................................................... 23
СИСТЕМА АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ ЦИФРОВЫХ СИСТЕМАВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ВЕРТЕШЕВ С. М., КОНЕВЦОВ В. А., МАКСЯГИНА И. А., ПОЛЕТАЕВ И. А., ТИМОШЕВСКАЯ О. Ю. 25
ОСОБЕННОСТИ РАСЧЕТА И ПРОЕКТИРОВАНИЯ ВЕТРОЭНЕРГЕТИЧЕСКИХУСТАНОВОК МАЛОЙ МОЩНОСТИ
ВОЛКОВ Д. А., ТУРУБАНОВ М. А....................................................................................................... 28
СЕБЕСТОИМОСТЬ ОБРАБОТКИ ПРИ ИСПОЛЬЗОВАНИИ МЕХАНИЗИРОВАННОГОНАЛАДОЧНОГО ПРИСПОСОБЛЕНИЯ
ГРИНЕВ Д. В....................................................................................................................................... 30
ОПТИМИЗАЦИЯ КОНСТРУКЦИИ ПОДЪЕМНИКА
ДМИТРИЕВ С. И., САМАРКИН А. И., ЕВГЕНЬЕВА Е. А....................................................................... 33

143
ПЕРСПЕКТИВЫ ИСПОЛЬЗОВАНИЯ ИСЧЕРПАЕМЫХ ИСТОЧНИКОВ ЭНЕРГИИ
ЕГОРОВ М. С., БУРЛОВ В. Г............................................................................................................... 37
ИННОВАЦИОННАЯ МОДЕРНИЗАЦИЯ РОССИЙСКОЙ ЭЛЕКТРОЭНЕРГЕТИКИ НАОСНОВЕ ИНТЕЛЛЕКТУАЛЬНЫХ КОМПОНЕНТОВ И ТЕХНОЛОГИЙ
ЗАДОРОЖНИЙ А. В. ............................................................................................................................ 39
ЭКСПЕРИМЕНТАЛЬНЫЙ СТЕНД ДЛЯ ИССЛЕДОВАНИЙ ТЕПЛОГИДРАВЛИЧЕСКИХХАРАКТЕРИСТИК В ТЕПЛОВЫДЕЛЯЮЩИХ СБОРКАХ ЯДЕРНЫХ РЕАКТОРОВ НОВОГОПОКОЛЕНИЯ
ЗАХАРЕНКОВ А. В., КОМОВ А. Т., ВАРАВА А. Н., БОЛТЕНКО Э. А., ДЕДОВ А. В., МЯСНИКОВ В. В........................................................................................................................................................................... 41
ПРИМЕНЕНИЕ БРУТТО-УРАВНЕНИЙ ДЛЯ ОПИСАНИЯ ТЕРМОЛИЗА ЧАСТИЦМИНЕРАЛЬНОЙ ЧАСТИ ТОПЛИВ
ЗАХАРОВ В. Ю., ЩЕЛКУНОВА П. И................................................................................................... 44
ТЕОРЕМА ШАКИРОВА М. А. ОБ ИСКРИВЛЕНИИ ПРОСТРАНСТВ В РАСЧЕТАХ СИЛ,ДЕЙСТВУЮЩИХ НА ТОКОВЕДУЩИЕ СИСТЕМЫ
ИОНИН С. А........................................................................................................................................ 45
ПОВЫШЕНИЕ ДОЛГОВЕЧНОСТИ ПОДШИПНИКОВ КАЧЕНИЯ
КАРАПЕТЯН Д. Э., ЛУКИН И. П., ШЕМЯКИН Э. В. ............................................................................ 49
СИНТЕЗ УПРАВЛЕНИЯ ДЛЯ ЭНЕРГОСИСТЕМЫ НА ОСНОВЕ РЕДУКЦИИ МОДЕЛЕЙС СОХРАНЕНИЕМ СТАТИЧЕСКИХ РЕЖИМОВ
КОЗЛОВ В. Н., ВАСИЛЬЕВ А. Ю......................................................................................................... 52
ИССЛЕДОВАНИЕ АВАРИЙНЫХ РЕЖИМОВ В ЭЭС С ИСПОЛЬЗОВАНИЕМ ПОЛНЫХМАТЕМАТИЧЕСКИХ МОДЕЛЕЙ В ФАЗНЫХ КООРДИНАТАХ
КОЗЛОВ В. Н., РЯБОВ Г. А., СИМАКОВ И. П. .................................................................................... 54
МОДЕЛИРОВАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ ИМУЩЕСТВЕНЫМ КОМПЛЕКСОМЭНЕРГОПРЕДПРИЯТИЯ
КУЗИЧЕВ В. М.................................................................................................................................... 57
РАЗРАБОТКА МЕТОДИКИ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНЫХ ПАРАМЕТРОВТРАНСФОРМАТОРОВ ИНВЕРТОРНЫХ ИСТОЧНИКОВ ПИТАНИЯ МАШИН КОНТАКТНОЙСВАРКИ
ЛИХАЧЕВ Д. И.................................................................................................................................... 63
ВЛИЯНИЕ ЖЕСТКОСТИ ПОДШИПНИКОВОГО УЗЛА НА РАСПРЕДЕЛЕНИЕНАГРУЗКИ МЕЖДУ ТЕЛАМИ КАЧЕНИЯ
ЛУКИН И. П., КАРАПЕТЯН Д. Э., ШЕМЯКИН Э. В. ............................................................................ 65
РАЗРАБОТКА МЕТОДИКИ РАСЧЕТА НАСТРОЕК ПАРАМЕТРОВРАСПРЕДЕЛЕННОГО ПИД-РЕГУЛЯТОРА ПРИ ОГРАНИЧЕНИИ НА КОРНЕВОЙПОКАЗАТЕЛЬ ЗАПАСА УСТОЙЧИВОСТИ
ЛЯШЕНКО А. Л................................................................................................................................... 69

144
РАЗРАБОТКА НОМОГРАММ ДЛЯ РАСЧЕТА НАСТРОЕК РАСПРЕДЕЛЕННОГО ПИД-РЕГУЛЯТОРА
ЛЯШЕНКО А. Л................................................................................................................................... 75
ИССЛЕДОВАНИЕ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ОТПЕЧАТКОВ АБРАЗИВНЫХЗЁРЕН ПРИ ШЛИФОВАНИИ
МАЛЬЦЕВ П. Н., НИКИФОРОВ И. П. .................................................................................................. 80
МОДЕЛИРОВАНИЕ РЕЖИМОВ РАБОТЫ СИСТЕМЫ ВОЗБУЖДЕНИЯСИНХРОННЫХ ДВИГАТЕЛЕЙ ПРИ ПРОВАЛАХ НАПРЯЖЕНИЯ
МАРФИН В. В., ФЕДОТОВ А. И. ......................................................................................................... 82
УСТОЙЧИВОСТЬ РАБОТЫ СИНХРОННОЙ МАШИНЫ В ЭНЕРГОСИСТЕМЕ
МАРФИНА Н. Н., ФЕДОТОВ А. И. ...................................................................................................... 85
АВТОМАТИЗАЦИЯ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ НА ОСНОВЕПОЛУСДВИГОВОЙ ТЕОРИИ ДЛЯ ТОНКОСТЕННЫХ КОНЕЧНЫХ ЭЛЕМЕНТОВ
МОРОЗОВ С. А. РЫБАКОВ В. А. ......................................................................................................... 86
КОМБИНИРОВАННЫЕ ТЕХНОЛОГИИ ПРИ АБРАЗИВНОЙ ОБРАБОТКЕ
НИКИФОРОВ И. П., МАЛЬЦЕВ П. Н. .................................................................................................. 88
НОВЫЕ ПОДХОДЫ К СОЗДАНИЮ СИСТЕМ ДИАГНОСТИРОВАНИЯ ОСНОВНОГООБОРУДОВАНИЯ АЭС РФ
ПАНКИН А. М..................................................................................................................................... 93
РАСЧЕТ ЧИСЛА ЭЛЕКТРОМОНТАЖНЫХ СОЕДИНЕНИЙ ДЛЯ БАЗОВЫХ НЕСУЩИХКОНСТРУКЦИЙ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ
РОМАНОВА Ю. С................................................................................................................................ 95
ИССЛЕДОВАНИЕ КОНЕЧНЫХ ЭЛЕМЕНТОВ ДЛЯ РАСЧЕТА ТОНКОСТЕННЫХСТЕРЖНЕВЫХ СИСТЕМ
РЫБАКОВ В. А., ТИХОНОВА С. Ю. .................................................................................................. 100
ВЛИЯНИЕ КАЧЕСТВА ЭЛЕКТРОЭНЕРГИИ НА ОБОРУДОВАНИЕ ПОДСТАНЦИЙ
РЫЛОВ Ю. А., ГАТИЯТОВ И. З., МУХАМЕТЖАНОВ Р. Н.................................................................. 101
ОБЕСПЕЧЕНИЕ НАДЕЖНОГО ЭЛЕКТРОСНАБЖЕНИЯ КАЗАНСКОГОЭНЕРГОРАЙОНА
САБИТОВ А. Е., ФЕДОТОВ А. И. ...................................................................................................... 102
УПРОЩЕННОЕ МОДЕЛИРОВАНИЕ ПРОЦЕССА ФОРМИРОВАНИЯ ЕДИНИЧНОЙЛУНКИ ПРИ ЭЛЕКТРОЭРОЗИОННОЙ ОБРАБОТКЕ
САМАРКИН А. И., НЕГИНА О. В. ..................................................................................................... 103
НЕКОТОРЫЕ ОСОБЕННОСТИ АНАЛИЗА ТОНКОСТЕННЫХ КОНСТРУКЦИЙ НАПРИМЕРЕ РАСЧЕТА СЕЙСМИЧЕСКОЙ УСТОЙЧИВОСТИ КОЛОДЦА НЕФТЕПРОВОДА
САМАРКИН А. И., САМАРКИНА Е. И. .............................................................................................. 107

145
ДИНАМИЧЕСКИЕ УГЛОВЫЕ ХАРАКТЕРИСТИКИ ТУРБОГЕНЕРАТОРОВ
СЕРОВ А. Е. ...................................................................................................................................... 110
МЕТОДЫ И ПРОГРАММНЫЕ СРЕДСТВА ПРОЕКТИРОВАНИЯ ФУНКЦИОНАЛЬНО-ТОПОЛОГИЧЕСКИХ СТРУКТУР РАСПРЕДЕЛЕННЫХ ТЕХНИЧЕСКИХ СИСТЕМ ПОКРИТЕРИЯМ ЖИВУЧЕСТИ
СИМАКОВ И. П., КОЛОКОЛОВА В. А. .............................................................................................. 112
МНОГОЦЕЛЕВОЙ ПРОГРАММНЫЙ КОМПЛЕКС СТРУКТУРНОГО АНАЛИЗА ИУПРАВЛЕНИЯ НАДЕЖНОСТЬЮ И БЕЗОПАСНОСТЬЮ АВТОМАТИЗИРОВАННЫХТЕХНИЧЕСКИХ КОМПЛЕКСОВ
СИМАКОВ И. П., ХОЛОДНЫХ П. В................................................................................................... 117
ПРОЕКТИРОВАНИЕ ВТСП-ТУРБОГЕНЕРАТОРА 25 МВТ ДЛЯ СУДОВЫХ СИСТЕМ
СМИРНОВ А. В. ................................................................................................................................ 122
ВЕТРОГЕНЕРАТОРЫ С АКСИАЛЬНЫМ МАГНИТНЫМ ПОТОКОМ ИПОСТОЯННЫМИ МАГНИТАМИ
ТИМОФЕЕВ С. С. .............................................................................................................................. 124
ПРИМЕНЕНИЕ НАВИГАЦИОННЫХ РЛС ДЛЯ ОБНАРУЖЕНИЯ РАЗЛИВОВНЕФТЕПРОДУКТОВ В МОРЕ
УШАКОВ И. Е................................................................................................................................... 127
РАЗРАБОТКА АВТОМАТИЗИРОВАННЫХ МЕТОДОВ ВЫДЕЛЕНИЯ НЕФТЯНЫХПЯТЕН НА РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЯХ МОРСКОЙ ПОВЕРХНОСТИ
УШАКОВ И. Е................................................................................................................................... 130
ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ВОЗДУШНОЙ ЛИНИИ
ФЕДОТОВ А. И., АБДУЛЛАЗЯНОВ Р. Э., ВАГАПОВ Г. В. .................................................................. 133
КОРРЕКТНАЯ МОДЕЛЬ СТРУКТУРЫ СЛОЖНЫХ ТЕХНИЧЕСКИХ КОМПЛЕКСОВ ВФОРМЕ СИСТЕМЫ ЛОГИЧЕСКИХ УРАВНЕНИЙ И ЕЕ ПРИМЕНЕНИЕ
ХОЛОДНЫХ П. В. ............................................................................................................................. 135
КАК РАБОТАЕТ ТРАНСФОРМАТОР
ШАКИРОВ М. А................................................................................................................................ 140