Thermal and seismic analysis of piping systems using ...
109
AN ABSTRACT OF THE THESIS OF Arun L. Nisargand for the degree of Master of Science in Mechanical Engineering Presented on January 9, 1981. Title: Thermal and Seismic Analysis of Piping Systems Using Classical Methods Abstract approved: Redacted for Privacy Dr. WillianyC. Kinsel "Piping Design and Engineering" first published in 1963 by Grinnell, Co. is widely used by engineers to perform approximate thermal stress analysis of high-temperature piping systems. The text consists of numerical to calculate end reactions and maximum bending stresses in a variety of piping configurations from known properties of pipes such as outside diameter and moment of inertia, material properties such as Modulus of Elasticity and Coefficient of Linear Expansion and specific properties of the configurations such as aspect ratio (length/height) and temperature differential. The results obtained by using formulae from the text are close to the ones obtained by the use of finite element computer programs. However, the text has some limitations. It lacks theoretical bases from which the numerical constants were derived. Thus, the text cannot be used to analyze piping configurations with aspect ratios outside the range listed in the text. The text also limits itself to piping configurations without intermediate restraints.
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Thermal and seismic analysis of piping systems using ...

AN ABSTRACT OF THE THESIS OF
Arun L. Nisargand for the degree of Master of Science in Mechanical
Engineering Presented on January 9, 1981.
Title: Thermal and Seismic Analysis of Piping Systems Using Classical
Methods
Abstract approved:
Redacted for PrivacyDr. WillianyC. Kinsel
"Piping Design and Engineering" first published in 1963 by
Grinnell, Co. is widely used by engineers to perform approximate
thermal stress analysis of high-temperature piping systems. The
text consists of numerical to calculate end reactions and
maximum bending stresses in a variety of piping configurations from
known properties of pipes such as outside diameter and moment of
inertia, material properties such as Modulus of Elasticity and
Coefficient of Linear Expansion and specific properties of the
configurations such as aspect ratio (length/height) and temperature
differential. The results obtained by using formulae from the text
are close to the ones obtained by the use of finite element computer
programs. However, the text has some limitations. It lacks
theoretical bases from which the numerical constants were derived.
Thus, the text cannot be used to analyze piping configurations with
aspect ratios outside the range listed in the text. The text also
limits itself to piping configurations without intermediate restraints.

The following thesis investigates three most common configura-
tions, viz., L, U, and Z, and determines theoretical basis and general
equations which yield numerical constants identical to the ones
given in the above text. It also describes how similar methods
can be used to analyze piping systems with intermediate restraints.
A numerical check of data thus derived along with the methods and
the data to analyze deadweight and seismic stresses in the piping
configurations is also included.
Thermal and Seismic Analysisof Piping Systems Using Classical Methods
by
Arun L. Nisargand
A THESIS
submitted to
Oregon State University
in partial fulfillment ofthe requirements for the
degree of
Master of Science
Completed January 9, 1981
Commencement June 1981
APPROVED:,
Redacted for PrivacyDr. William C. Kinsel,/Lecturer of Mechanical Engineering in charge of major
Redacted for Privacy
Dr. JameiR. WetlY.Head of/Dppartment of Mechanit#1 Engineering
i/
Redacted for Privacy
Dean of raduate School
Date thesis is presented: January 9, 1981
Typed by Mrs. Richard Hoyt for Arun L. Nisargand
TABLE OF CONTENTS
I. Introduction 1
II. Approach 4
III. Theoretical Background 6
IV. Thermal Analysis of L, U and Z Shapes 16
A. Analysis of "L", "U" and "Z" Configurations. 17
B. Comparison of Numerical Constants 31
V. Numerical Check 38
VI. Deadweight and Seismic Analysis., 49
A. Analysis of "L" Configuration 50
B. Analysis of "U" Configuration 62
C. Analysis of "L" Configuration withConcentrated Load 71
VII. Conclusions 81
VIII. References 84a
Appendices
A. Grinnell Method of Simplified Piping Analysis 85
B. "L" Shape with a Guide 92
NOMENCLATURE
A Area of cross-section, in.2
, or ft.2
LA] Matrixofcoefficientsa_of simultaneousequations
3.3
a Length of a pipe section as indicated inappropriate figures, inches or feet
b Same as above
c A constant dependent upon certain materialproperties. Specifically, coefficient of linearexpansion and modulus of elasticity.
c' A constant dependent upon certain sectionalproperties of pipe section. Specifically,weight per unit length, outside diameter, andmoment of inertia.
lc}D
E
F
G
h
I
Column matrix of constants
i) Displacement or settlement of supports, inchesor feet
ii) Outside diameter of pipe or tubing, inches
Inside diameter of pipe or tubing, inches
Modulus of Elasticity, lb/in.2 or lb/ft.2
Force; subscripts indicate directions, pounds
Gravitational constant, 32.2 ft./sec2
Height of pipe configuration, inches or feet
Moment of Inertia of a pipe section, in.4
Same as above (used in Grinnell handbook)p
kx, ky,_ kb Constants used in Grinnell handbook to determineFx, F
yand S
b
K)Column matrix of constants
L Length of a pipe configuration, inches or feet

[L3 Lower triangular matrix used in Cholesky's method
M Bending moment; subscripts indicate location,in.-lb or ft.-lb
My Bending moment due to force F; normally used inslope-deflection method, in.-lb or ft.-lb
m Ratio of L/h or h/L as explained in the text
N A constant as indicated in the text
n Load factor due to seismic or other conditions
P Applied force or concentrated weight, lb
Sb
Bending stress, lb/in.2
[T] Upper triangular matrix as used in Cholesky'smethod
AT Temperature differential, °F
U Total strain energy, lb-in.
w Weight per unit length, lb/ft.
x Distance of section under consideration alongx axis, inches or feet
{xi Column matrix of variables
y Distance of section under consideration alongy axis, inches or feet
YB 2 YC
a
Vertical deflections of points B and C
i) Coefficient of linear thermal expansion,in./in.
oF
ii) Ratio a/L where indicated
Ratio b/L
Strain, subscript indicates direction
Stress (usually bending stress), lb/in.2
Angle of rotation, radians
THERMAL AND SEISMIC ANALYSISOF PIPING SYSTEMS USING CLASSICAL METHODS
I. INTRODUCTION
Piping in a processing or a power plant represents a substantial
portion of the cost of the plant. Design of the piping system in a
typical nuclear power_plant requires several thousand man-hours
representing 30 to 35% of the total design effort and is usually on
the critical path. Increasing regulatory requirements for commercial
nuclear power plants has forced the construction contractors to
perform thorough stress analysis of the piping systems to assure its
safety during a variety of seismic and thermal conditions.
Piping systems in a nuclear power plant are classified in two
groups. Piping consisting of pipes of 2 1/2 inches in diameter and
above are called "large bore" piping. Piping less than 2 1/2 inches
nominal diameter are called "small bore".
Large bore piping usually carries process fluids such as steam
at process temperature and pressure. Small bore piping normally
consists of piping for fluid samples, instrument air and sensing lines
subjected to less severe conditions than the process piping. Instru-
ment tubing which is usually 1/2 inches outside diameter and smaller
is classified as small bore piping. Design criteria are the same for
both types of piping and usually involve a "code" check to assure
compliance to ASME Boiler and Pressure Vessel Code Section III
class 1, 2 and 3 (1).
The design process consists mainly of preliminary design and
layout, field check before installation, installation, "as built"
drawings and stress analysis to verify code compliance. If the
analysis indicates that the piping does not meet the specified code
criteria, the piping is rerouted to increase thermal flexibility or
2
additional supports are added to reduce seismic stresses. Yet another
option is changing pipe size.
The cost of such rework can be prohibitive depending upon the
complexity, available space, type of material and type of N.D.E.
(Non-Destructive Examination) required. Hence, the preliminary
design is made conservative to reduce the possibility of failure
when rigorous analysis is performed.
Most architect-engineering firms and piping contractors have
some form of "cookbook" or approximate criteria for pipe spans and
thermal flexibility which serve as an aide for preliminary design.
All these cookbooks are based on two well-known texts, namely,
"Design of Piping Systems" by M. W. Kellogg Co. (2) and "Piping
Design-and Engineering" by Grinnell Co. (3). The latter is a
practical version of the former and is in wide use among piping
designers and engineers.
The Grinnell handbook (as it is normally referred to), though
a very good reference, does not describe the theoretical basis for
the data delineated in the text. The basis of the relations in the
text, first published 20 years ago, is apparently unknown to the
personnel currently working for the company. Apparently, the
theoretical basis was never documented; the originators are unknown.
Specifically, the effort was undertaken to answer the following
questions.
1. It is a common misconception among practicing engineers
that the Grinnell method of approximate analysis
applies only to pipes and not to the thin wall tubing
(which is specified by the outside diameter as against
the pipes which are specified by nominal diameters).

3
This is despite the fact that there is nothing in the
text to suggest this. The question then is: Can the
Grinnell handbook be used to determine the flexibility
of instrument tubing or is it limited to only pipe
sizes?
2. The handbook has its limitations. It does not list the
values of the constants for all "L/h" (length to height)
ratios. As an approximation, the values can be
interpolated between the ones given in the book.
However, there are no guidelines in the handbook to
determine the constants outside the range given in the
tables for various shapes. An effort to use curve
fitting techniques yields a relation of the form
a = bxn where b and n both are fractions. The question
then is: What is the theoretical basis or governing
equation from which the data in the handbook were
created?
3. Do the above governing equations, if any, yield same or
similar constants as the ones given in the Grinnell
handbook?
4. Does an independent numerical check confirm the accuracy
of the constants?
, 5. Can similar data be developed for pipe stresses due to
say deadweight or seismic loads?
The purpose of this thesis is to answer these questions.
4
II. APPROACH
Grinnell handbook contains data for numerous piping configura-
tions. However, most commonly used configurations are the "L" shape
(page 89), "U" shape (page 91) and the "Z" shape (page 90). These
are chosen for derivation. Most piping configurations can be
idealized as assemblages of these simple shapes.
A cursory look at the "L" shape with fixed ends reveals that the
problem of stresses due to the restrained expansion can be solved by
using Castigliano's second theorem used for statically indeterminate
structures. Thus, the scope of work for this project has been
organized as follows:
Section III includes the derivation of Castigliano's
second theorem (4) and description of Cholesky's (6) method
for solving simultaneous equations.
Section IV derives general equations for the L, U and Z
shapes by using Castigliano's second theorem and also
compares the numerical values determined from these
equations with those found in the Grinnell handbook.
Section V summarizes the results of an independent numerical
check of the stresses and reactions by using a finite
element computer program.
Section VI delves into the derivation of equations for the
typical configurations to account for deadweight and
seismic stresses by using the "slope-deflection" method (5).
Section VII delineates the conclusions and addresses the
scope of future work in this area.
5
Section VIII contains a list of important references used
for this thesis.
Appendix A contains catalogue cuts from the Grinnell hand-
book with a solution to a sample problem. It is recommended
that a reader not familiar with piping analysis review
Appendix A before the rest of the text.
Appendix B lists the data created for "L" shape with an
intermediate restraint.

6
III. THEORETICAL BACKGROUND
3.1 Energy Method of Castigliano (4)
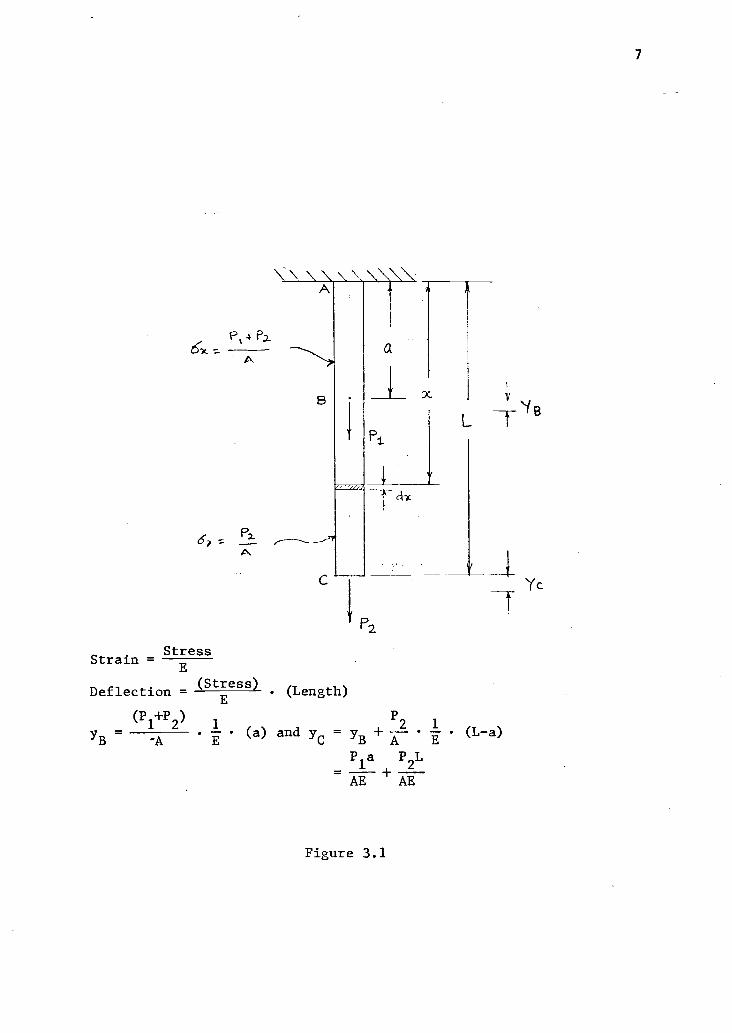
Consider a relatively long vertical weightless bar of length
L and cross-sectional area A supported at the top and axially loaded
as shown in Figure 3.1.
The strain energy UAL. for Section AB is
1(P1 +13 2
P1+P
2) (P
1+P
2)
2
UAB
=(:4 xe x)2 2 A AE
AB 2A2E
and for Section BC
P22
xcxl. 1 P2) P2 "2
UBC =((2 2(:A (AE)C 2A
2E
Hence, the total strain energy stored in the bar is
a
U = UAB
A dx + UBC
A dx
0 a
2 L 2
'2E -"
a,=
a
(Pli-P)2AE
2dx +
2A
0 a
(P1+P
2)2a P
2
2(L-a)
2AE 2AE
Castigliano's second theorem can now be stated as follows:
The partial derivative of the expression for the total
strain energy stored in a body with respect to a load
acting on the body gives the expression for the displacement
1'4P2z.)c -
A
(5i
A
Strain =Stress
Deflection
yB
E(Stress)
E(P
1+P
2)
1
(Length)
E(a) and yc = yB
2
Pla P2L
AE AE
Figure 3.1
(L-a)
7
8
at the point of load application in the direction of the
load. In the event that the load is a moment, or a torque,
the displacement at the point of application will take the
form of an angle of rotation.
The theorem can be proved by taking the partial derivatives of
U with respect to forces P1 and P2
. We obtain
and
aU(P
1+P
2)a
aP1
= yB
aU.(P
1+P
2)a P
2(L-a) P
1a P2L
=P2 AE AE AE AE YC
where yB and can be readily recognized as the expressions for the
displacements at B and C, respectively.
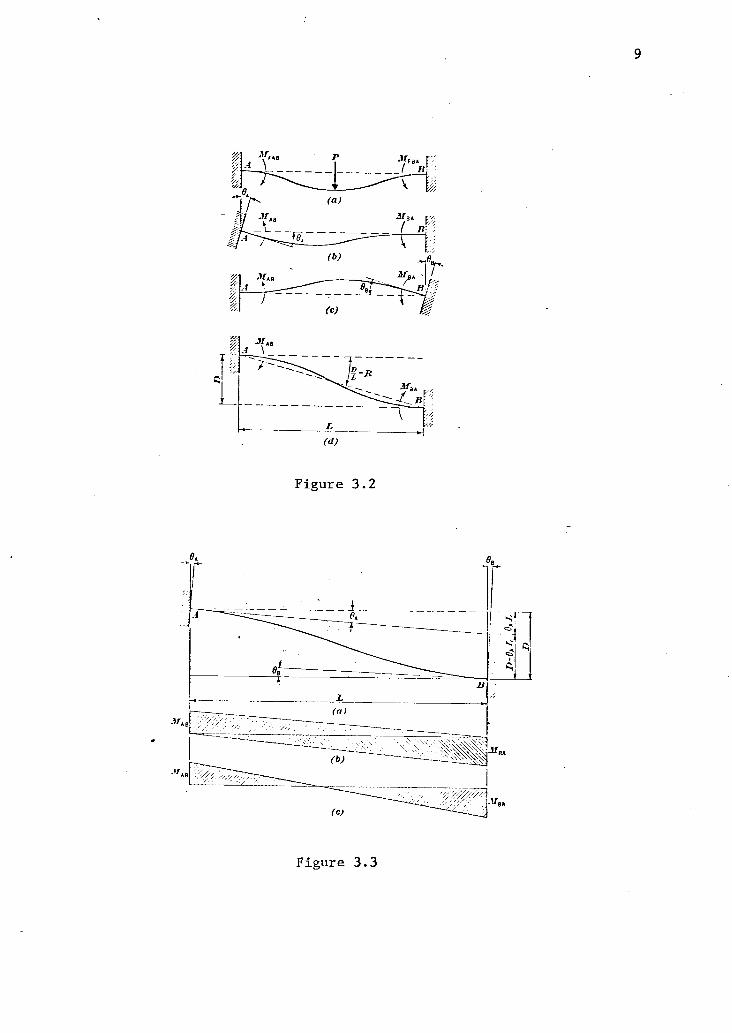
3.2 Slope-Deflection Method (5)
The slope-deflection method (5) for distribution of end moments
in frames and continuous beams is one of the older classical methods
of approach. The method provides a visual conception of the action
of continuous structures which greatly assists in the understanding
of other methods of approach.
Figure 3.2(a) indicates the end moments produced by fixed end
conditions. The form of elastic curve and the direction which end
moments within the beam would take when one end is rotated are shown
in Figure 3.2(b). Similar values are shown for the rotation of the
other end in Figure 3.2(c) and Figure 3.2(d) shows the effect of the
displacement of the ends when there is no rotation. The slope-
deflection general expression for end moments includes factors for
9
Figure 3.2
ArA8
(a)
Figure 3.3

10
each of these conditions which, when properly evaluated, will give
the amount of the end moment for any existing condition.
Figure 3.3(a) indicates a condition in which clockwise rotation
of the end supports has been assumed. Let OA represent the angular
rotation of end A, 0B
the angular rotation of end B, and D the
displacement. Displacement is measured with respect to a line
connecting the positions of the ends when the beam is in its
unstressed condition. The end moment at end A of the beam AB will
be called MAB and that at the opposite end, MBA. These end moments
may be represented by triangular moment diagrams as shown in
Figure 3.3(b). The elastic deflection of point B from the tangent at
point A is seen to be D-0AL. The moment of M/EI areas between A and
B about point B must equal D-OAL. The change in slope to the end
tangents from A to B will be 0B-0A, or the area of the M/EI diagram
from A to B must be equal to 0B-0
A.The two equations which are
obtained when the areas and arms are expressed in terms of the end
moments and spans are:
MABL2L
MDA
LL
2E1 x 3 + 2E1 x -3- D °AL
AB L MBAx + xL =NO e
EI 2 EI 2 B A
A value for MAB
may be found from these equations by eliminating
MBA as follows:
Eq. 3.2.1
Eq. 3.2.2
6EIOA
2NAB 1- NBA
GEID
L2
NAB + MBA
2EIOA 2EIOB
subtracting
or
6EID 4EIeA
2EI6B
MAB
L2
AB
LEI(26
A+ 0
B L-32
)
11
In addition to the rotations and displacement shown, a load may
be placed between the ends A and B, producing end moments. If these
end moments are designated as MFAB and NBA at ends A and B,
respectively, the total end moment at end A will be expressed as
where
m= 2
1E.,
3D
AB ic
(20A
+ 0B
- )
MAB
is the bending moment at end A of beam AB.
(3.2.3)
NAB is the fixed end moment at end A resulting from loads
between A and B when both ends are fixed.
E is the Modulus of Elasticity of the material.
I is the Moment of Inertia of the beam AB.
6A is the angle of rotation of the joint or end A.
Bis the angle of rotation of the joint or end B.
D is the displacement of end B relative to end A measured
perpendicularly from the line connecting A and B when the
beam is in its unstressed position.
In most cases of piping analysis, it is assumed that supports
do not settle. Hence, substituting D=0 in above general expression
we get
2E1M= M,AB MFAB L
(28A B
)
3.3 Cholesky's Method of Solution to A Matrix Equations (6)
The matrix equation
EA] {,X3 =
12
(3.2.4)
(3.3.1)
may be solved for 0 by premultiplying the equation by the inverse
of {A }.
LX= rie {c}
Cholesky's method avoids the necessity of inverting the matrix tA3,
the elements of W being available by successive algebraic steps.
Cholesky's method depends on converting the original equation,
Eq. (3.3.1), to the form
[T3 {x) {K1
where (for. a 3x3 matrix)
t12
t13
[i] = 0 1 t23
0 0 1
(3.3.2)
(3.3.3)
in an upper triangular matrix with unit diagonal elements. For
example, consider a 3x3 matrix
0 0 1
1
x2
=1 t23
x3 k3
0
{i
1 t12
t
The elements of {x) from the above equation are simply found
by a backward substitution as follows
x3 = k3
x2 t23x3 k2
xl t12x2 t13x3 kl
x3 = k3
x2 = k2 - t23x3
xl kl t12x2 - t13x3
Thus, if IT] and {lc} are known, the solution forILK1 in
Eq. (3.3.1) is available.
To determine [T] and tki, multiply Eq. (3.3.2) by a lower
triangular matrix.
[L]
as follows
ylll0 0
121 122
1 1 131 32 33
[LIT)(x) = (13(K}
13
(3.3.4)
(3.3.5)
14
For this equation to equal the original equation, the following
relationships must exist
[A] = (131T)
.(c =
Writing out the above equations in terms of their elements, we-
have
NNW
alla12
a13
111 111112 111113
a21
a22 a23 21
(121
t12+1
22)
(121t 13+122t23)
a31 a32 a33 131 (1
31t12+1
32) (1
31t13
+132
t23
+13
and
cl
C21
c3
I11k
1
121
k1+1
22k2
3k1+1
32k2+1
33k3
By equating the elements in these equations, we have
all= 1
11
a21
= 121
a = 131 31
a = 1 t12 11 12
a131
13 11113

15
a22
= (121
t12+1
22)
(121t13+122t23)
.6- 122
= a -1 t22 21 12
a23t23 t
22
(a23 21
t13
)
a32. 1
32= a
32-1
31t12
a33
= (131
t13+1
32t23+1
33) .. 133 a33-L31t13-132123
c1= 1
11k1
c2
= 121
k1+1
32k2
c3= 1
31k
1+1
32k2+1
33k3
k =1
k2
k3 =
c1
111
1 (
r, -2
(c3-1
k21 1
)
k32k2)
1
33
Thus, the elements of the matrices [13, (T) and tKi are now available
in terms of the known elements of CA] and {C) and Eq. (3.3.1) may be
solved without inverting the matrix [A].
Reference (6) describes a generalized form of the above method
for nxn matrix. A method for 3x3 matrix will suffice for the
following analysis.

16
IV. THERMAL ANALYSIS OF L, U AND Z SHAPES
This section deals with developing general relations for the
three most common piping configurations (viz L, U and Z) subjected
to a temperature differential.
Castigliano's second theorem is used to derive these relations
because movements of the released ends can be easily determined
by using known linear expansions (aATL) which then can be equated to
the partial derivative of the total strain energy with respect to
unknown reactions, 3U/3F; thus, a general expression for unknown
reactions can be determined. The expressions for these are then
compared with the ones given in the Grinnell handbook for corre-
sponding shapes.
Substitution of numerical values for L/h into these expressions
yields values for kx , ky
and kb. The values thus determined are close
to the ones given in the Grinnell handbook. The maximum variation
is approximately 3% although most common variation is 2%. The values
are calculated by using a programmable calculator which rounds off
only the final answer and not the intermediate results. This may
explain the difference in numerical values from the Grinnell handbook.

17
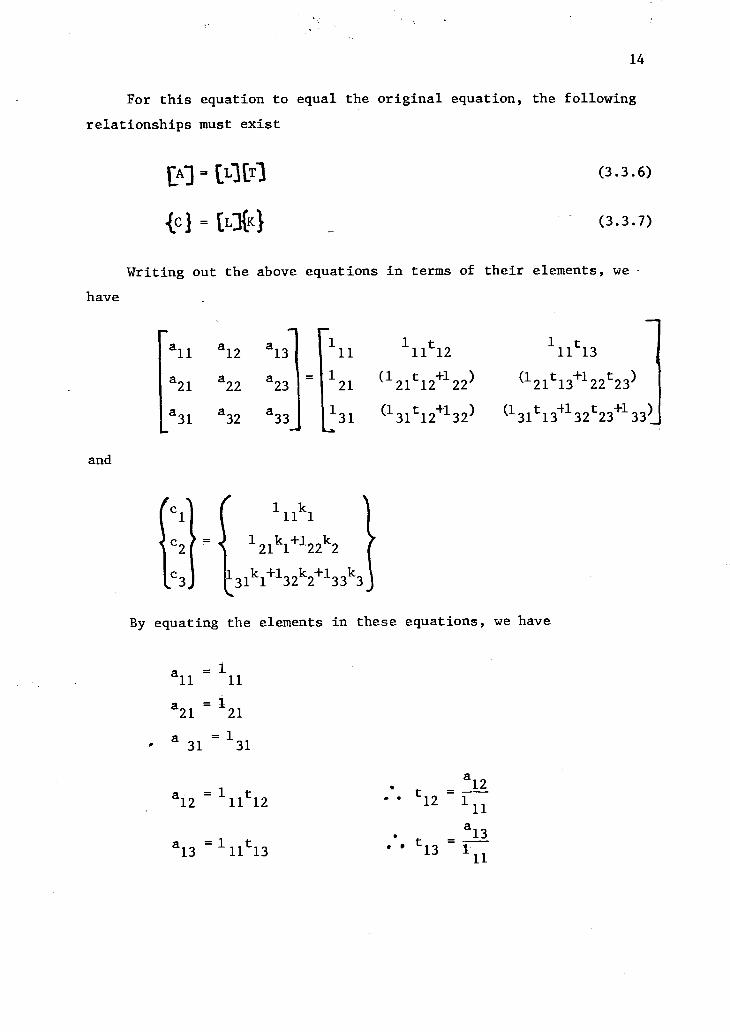
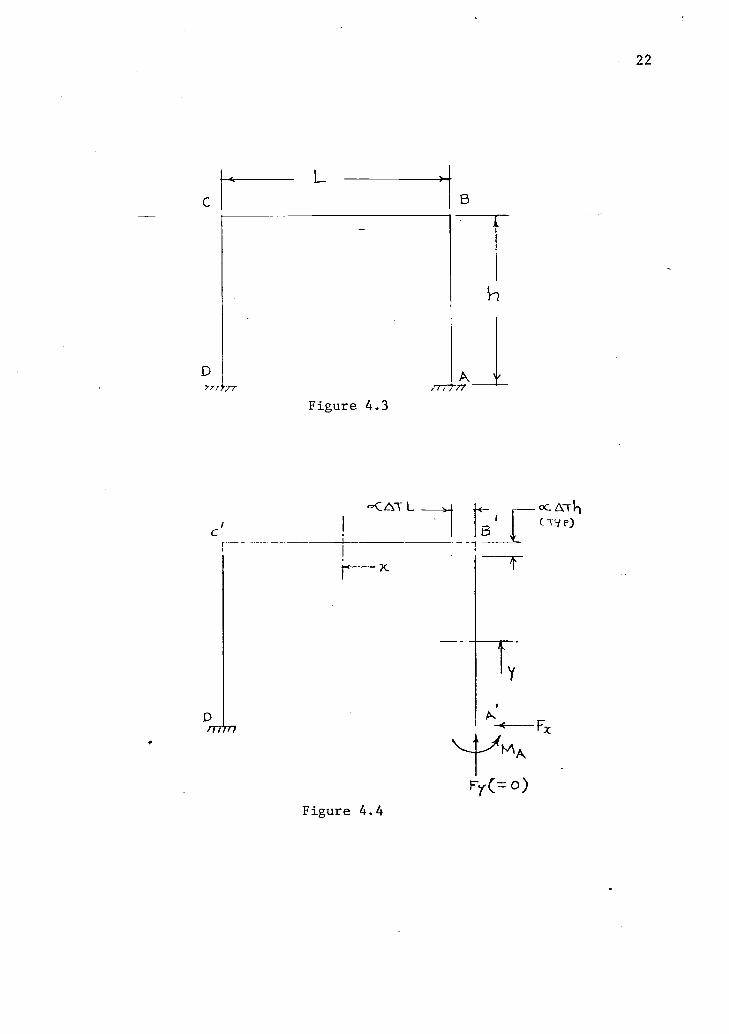
IV.A. Analysis of "L", "U" and "Z" Configurations
Figures 4.1, 4.3 and 4.5 show "L", "U" and "Z" configurations. All
the configurations are clamped at two ends preventing the translation
and rotation of the ends. They are all subjected to a temperature dif-
ferential due to the high-temperature fluid inside the pipe giving rise
to a temperature differential AT °F.
To determine the end reactions and moments of this statically inde-
terminate problem, we can release end A in each case. Due to the ther-
mal expansion, point A will move to a new location A'.
Figures 4.2, 4.4 and 4.6, respectively, show the "L", "U"'and "Z"
configurations in the above situation.
The derivation of the general equations is based on the fact that
forces Fx
and F and a moment MA
is applied to the end A to bring it
back to its original position before the thermal expansion.
Analysis of "L" Configuration:
To bring A' back to A, we apply forces Fx
and F and a moment MA
as shown in Figure 4.2.
Thus, the moment on leg BA is MBA = (Fx)y + MA.
Similarly, the moment on leg CB is MCB = (Fx)h - (F )x + MA.
Therefore, the total strain energy is
h 2 2
U =(MBA) dy +
(NCB)dx
2E1 2E10 0
ht(Fx)y + MA)2 jr:L L(Fx)h - (Fy)x + MA]2
2E1 2IE1dxdy +
0

Figure 4.1
2C
A
--1
MA
Figure 4.2
A
B
-17
Fy
cc LYN" L
18

According to Castigliano's second theorem, partial derivatives of
U with respect to Fes, Fy
and MA should yield the movements along
Fx
and F and rotation at A.y
3U DU 3U- Lx, = Ay and = e
aFx
aFy 3MA
where Ax = LaAT, Ay = haAT and 0 = 0
Then
Similarly,
19
h2CF y+M:3 L 21.(F)h-(Fy)x+MO
DF
DU
(2E1
) A(Y)dY +f 2E1
(h)dx = aATL
x0
-3- +h L)Fx
L2F + (h2
+hL)M = aATLEI1 3 2
y 2(4.1)
h rau f 2[(Fx)y +MA
(0)dy
]L21.(Fx)h(Fy)x+mt)
aF 2E1 2E1( x)dx
Y 0 0
= aLTh
2hL
2Fx +
1L3Fy - 1 L2M = aAThEI
and finally;
h21(F):
)
au211(Fx)h(F )x-Fm
(1)dy +y 18:
1(1)dx =
Aam 2E1 2E1
0 0
(4.2)

2
1h2+hL F
x1L2Fy+ (h+L)M
A= 0
2
Thus, the three equations are:
(1 h3+h2L)Fx 2
- hL2Fy 2+ (1 h2+hL)M
A= aATLEI
3
- 1 hL2Fx+ 1 L3F
y2 1-L M = aAThEI
A
20
(4.3)
(4.1)
(4.2)
h2+hL)Fx - L2Fy + (h+L)MA = 0 (4.3)
Solving these simultaneously for Fx, F
yand M
Ausing the method
described in Section III, Paragraph 3.3, we get
and
3(3m3+4m+1)
Fxx - aATEm3(m+1) L`
F =3lm
2(m+4)+1
aATEI
Y m(m+1)L2
6MA 18(m
2+m+2)
aATE D2I/D m(m+1)
where I is moment of inertia for pipe, in.4
L is length in feet
D is outside diameter of pipe in inches
m = h/L
Comparing the above equations with the ones for "L" shape in the
Grinnell handbook (page 89 of this report) we find
3(3m3+4m+1)
k -3br
2(m+4)+33 18(m
2+m+2)
kx = , and kbm3
(m+1)m(m+1) m(m+1)

21
Table 4.1 shows a comparison of the values of kx y, k and kb, as shown
in the Grinnell handbook (page 89 of this report), and the ones calcu-
lated using above relationships.
As seen from the table, the values are similar with only minor
differences probably due to rounding errors.
Analysis of a "U" Configuration:
The legs DC and BA are assumed to be of equal length. Thus, to
bring A' back to A, we apply force Fx and moment MA as shown in
Figure 4.4.
The moment on leg BA is
MBA (Fx)Y MA
The moment on leg CB is
mcB (Ex)hMA
and the moment on leg DC is
MDC (Fx)Y MA
Therefore, the total strain energy is
h(MBA) (MCB)
2 h 2 h(MDC)2
2E1
' SU = dy +
52E1
dy +2E1
dy
0 0 0
h
SUFx
2E1
)y - MA]2 1,
[(Fx
2E1
)h -Mi2
= dy + dx
0 0
[(Fx)y MA]2
2E1
0
/7/7/1
Figure 4.3
mu/
.o.0 AT L
I
Figure 4.4
A.
MA
Fy(= 0)
oC AT hCry?)
22

According to Castigliano's second theorem, partial derivatives of U
with respect to Fx and MA should yield the movement along Fx and
rotation at A.
3U= Ax and aU
a= 0
3Fx
mA
where Ax = aATL and 0 = 0.
Thus,
hau
q(Fx)y M] 2[(Fx)h m;)= 2
AJ " h dx3Fx
2E1 2E1
0 0
= aATL
h
2(2h + L)Fx - h(h+L)M
A= aATLEI
3
Similarly,
DU= 2
2[(Fx)y MA](-1)dy +
2[(Fx)h MA]
3MA 2E1 2E1( 1)dx
= 0
0 0
23
(4.4)
h(h+L)Fx - (2h+L)MA = 0 (4.5)
therefore, the equations are
and
h2(2h+3L)F - 3h(h+L)M
A= 3aATLEI (4.4)
h(h+L)Fx - (2h+L)MA = 0 (4.5)

24
solving these simultaneously for Fx and MA using the method described
in Section III, Paragraph 3,3, we get
and
3m3F (m+2) GATEx (2m+1)
6 MA 18m2(m+1)
DGATE2I/D (2m+1)
where I is moment of inertia for pipe, in.4
L is length in feet
D is outside diameter of pipe in inches
m = L/h
Comparing the above equations with the ones for "U" shape in the
Grinnell handbook (page 91 of this report), we find
and
k3m
3(m+2)
x (2m+1)
18m2(m+1)
kb(2m+1)
where m = L/h
Table 4.2 shows a comparison of the values of kxand kb, as
shown in the Grinnell handbook (page 91 of this report), and the ones
calculated using the above relationships.
As seen from the table, the values are similar with only minor
differences, probably due to rounding errors.
Analysis of a "Z" Configuration:
To bring A' back to A, we apply forces Fx
Fyand moment M
Aas
shown in Figure 4.6.
The moment on leg BA is
MBA = -(Fy)x + MA ;
Q
D
r
L
b
Figure 4.5
h
cK L\T
Figure 4.6
czAT(a+b)
I Ai
FY
A
Fx
25
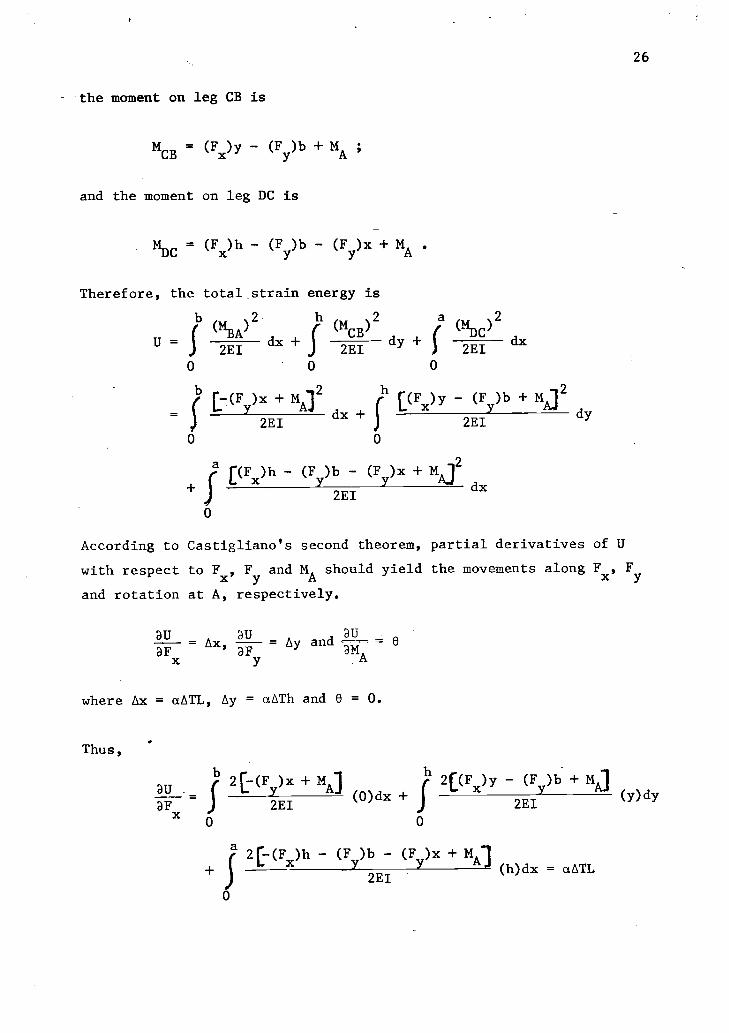
26
the moment on leg CB is
MCB(Fx)y - (F )b + MA ;
and the moment on leg DC is
MDC = (Fx)h - (F )b - (F )x + MA .
Therefore, the total strain energy is
b 2 2 a 2
S (MBA)dx +
jdy +
r1 (MCB) (MDC)U = dx
2E1 2E1 2E1
0 0 0
b h(Fy)x + NO
2
dx +[(Fx)y - (Fy
d
)b + Mj2
= y2E1 2E1
0 0
a[(Fx)h - (F )b - (F )x + 1
2
+y y
"""' dx2E1
0
According to Castigliano's second theorem, partial derivatives of U
with respect to F , F and MA should yield the movements along F , Fx y x y
and rotation at A, respectively.
311 DU
Ax,= Ay and
DU0
8F Fx
aFy A
where Ax = aATL, Ay = aATh and 6 = 0.
Thus,
3U .
2E1
2 F )x + MA]
(0)dx +21(Fx)y - (F )b + MLA]
aF 2E1(Y)dY
x0 0
0
a2(E(Fx)h - (F )b - (F )x + MA]
2E1(h)dx = aATL

27
3h3 +h2Fx--2-
) hh2 1-2--
) (1ha
2Fy 2+ h
2+ ha)M
A
= EIaATL (4.7)
Similarly,
DU 2[-(F )x MA]2[(Fx)y (Fy)b + M
3F 2E1
A]( x)dx + (-b)dy
y0 0-
a2I(Fx)h - (F )b - (F )x + MAI
2E1(-b-x)dx = aATh
0
(1 2 1 2) 1 3 2 2 2 1 3)- .y. bh + bha + -2- ha + -j- b +bh+b a + ba +3 a F
y
- -i1 2 1 )b + bh + ba +
-2-
aMA
= MaATh(
(4.8)
and finally,
DUJ-13 2[7(F )x + MAJ rh 2L(Fx)y - (F )b + MA)
(1)dx + (1)dyDMA 2E1 2E1
0 0
JP 2 1..(Fx)h(F )b - (F )x + MA]
(1)dx = 02E1
0
h2+ ha F
x1
- b2+ bh + ba + 1 a
9Fy+ (b + b + a)M
Az 2
= 0 (4.9)

28
Therefore, the equations are
3
(1 (1 1 1h3+ h2 a)Fx -2- bh
21-+ bha + hat Fy + 2 h2 + ha MA
= EIaAT (a + b) (4.7)
-(1 2 1 2) (1 3 2 2 2 1 3)+ bha ha Fx + V3* +bh+ba+ ba +bh
-2
(, 2 1 2)b + bh + ba + a MA = AIaLTh (4.8)
(1 2 ) (1 2 1 2)h + ha Fx f b + bh + ba + T a F + (b + h + a)MA
Y
= 0 (4.9)
Solving these equations simultaneously to get a long hand or
general solution is difficult. But the task can be greatly simplified
for specific numerical values for the ratio of a/b.
Thus, substituting a/b=1 (or a=b=L/2) we get simplified equations
as follows
2h2(3b+h)F
x- 3bh(3b+h)F + 3h(3b+h)M
A= 12EIaATb
-3bh(3b+h)Fx
+ 2b2(8b+3h)F 6b(2b+h)M
A= 6EIaATh
hF 2bF + 2MA
= 0. x
Solving Equations 4.10, 4.11 and 4.12 simultaneously for Fx
, Fy
and
MA
using the method described in Section III, Paragraph 3.3, we get
Fx
=24m(2m2+3)
Ea1T(3m+4) L2
F =24(3m
3+6m+2)
EaATy m(3m+4)
L2

29
and 6 =MA 72(m
3+3m+2)
EaATD
for L/H 5 1.02I/D m(3m+4)
Note that, as piping designers, we are interested in maximum
stress and, hence, in maximum bending moment on the pipe. Due to the
configuration of "Z" shape, the moment MA at end A is not always the
highest. For L/h > 1.0, it is higher at "C" and can be determined as
M = -Fy b + Fxh + MA
This yields
2
6 = 2I/D 7T17-44)-3)EaAT -12-
where I is moment of inertia for pipe, in.4
L is length in feet
D is outside diameter of pipe in inches
m = L/h
Comparing above equations with the ones for "Z" shape in the
Grinnell handbook (page 90 of this report), we find
24m(2m2+3)
kx (3m+4)
k =24(3m
3+6m+2)
y m(3m+4)
=72(m
3+3m+2)
kbm(3m+4)
72(2m2+3)
(3m+4)
for m 5 1.0
for m > 1.0

30
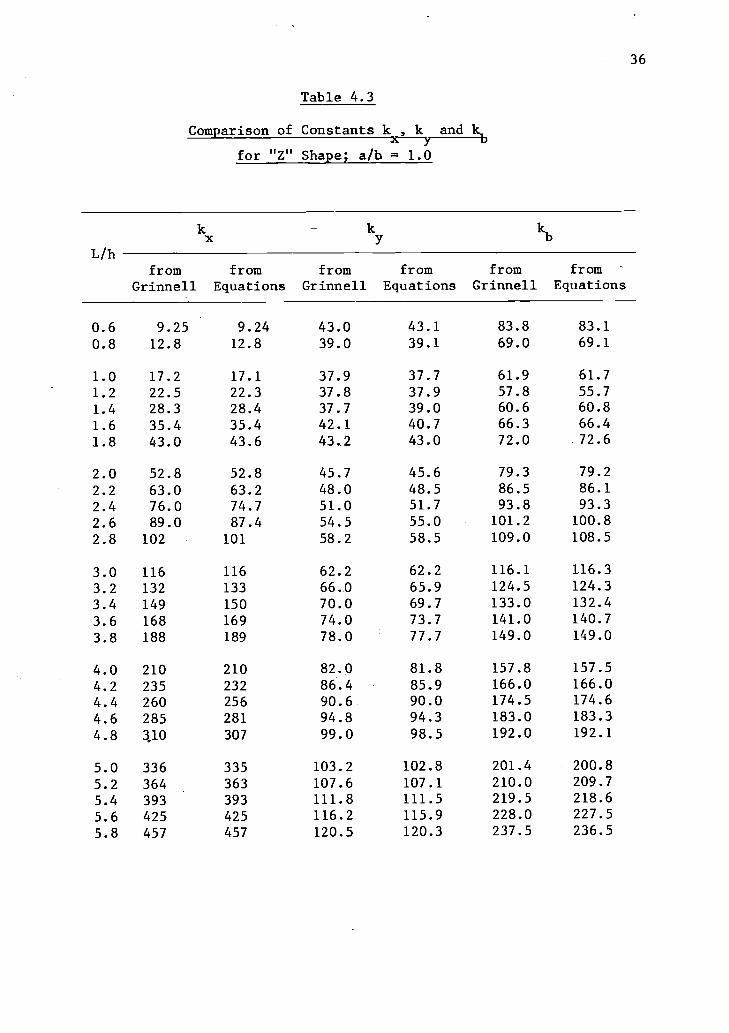
Table 4.3 shows a comparison of the values of k , kyand kb as shown
xin the Grinnell handbook (page 90 of this report) and the ones cal-
culated using above relationships.
As seen from the table, the values are similar with only minor
differences, probably due to rounding errors.

31
IV.B. Comparison of Numerical Constants
Table 4.1, 4.2 and 4.3 on the following pages show a comparison
of numerical constants computed from the general equations for "L",
"U" and "Z" configurations.
The constants were computed using HP-67 programmable calculator.
Rounding of the decimals was limited to the final answer. This may
explain the small differences between the constants as shown in the
Grinnell handbook and the ones calculated using generalized equations.
The tables prove the similarity of theoretical basis used by the
Grinnell handbook and the one developed in the previous section.

32
Table 4.1
Com arison of Constants k , k and for "L" Sha e
L/h
k kkb
fromGrinnell
fromEquations
fromGrinnell
fromEquations
fromGrinnell
fromEquations
1.0 12.0 12.0 12.0 12.0 36 36
1.2 17.2 17.2 12.5 12.5 46 46
1.4 23.0 23.8 13.4 13.2 58 57
1.6 32.0 32.0 14.4 14.2 71 71
1.8 42.0 42.0 15.4 15.3 85 86
2.0 54.0 54.0 16.6 16.5 102 102
2.2 68.3 68.1 17.8 17.8 120 120
2.4 84.4 84.4 19.2 19.1 140 139
2.6 103 103 20.6 20.6 161 160
2.8 125 124 22.0 22.0 184 183
3.0 150 149 23.5 23.5 209 207
3.2 175 175 25.0 25.0 234 232
3.4 207 205 26.5 26.6 259 259
3.6 237 238 28.0 28.1 287 288
3.8 274 275 29.5 29.7 318 318
4.0 315 314 31.5 31.4 349 349
4.2 356 358 33.0 33.0 381 382
4.4 406 405 34.6 34.6 414 416
4.6 456 456 36.2 36.3 450 452
4.8 510 511 37.8 37.9 487 489
5.0 570 570 39.5 39.6 528 528
5.2 630 633 41.2 41.3 569 568
5.4 700 701 43.0 43.0 610 610
5.6 775 774 44.7 44.7 652 653
5.8 855 851 46.2 46.4 696 697
6.0 938 933 48.2 48.1 743 743
6.2 1,020 1,021 49.8 49.8 790 791
6.4 1,110 1,113 51.6 51.5 840 839
6.6 1,212 1,211 53.4 53.2 892 890
6.8 1,313 1,314 55.0 54.9 944 941

33
Table 4.1 (continued)
L/h
kx kykb
fromGrinnell
fromEquations
fromGrinnell
fromEquations
fromGrinnell
fromEquations
7.0 1,426 1,423 56.8 56.7 997. 994
7.2 1,517 1,537 58.6 58.4 1,050 1,049
7.4 1,655 1,658 60.2 60.1 1,104 1,105
7.6 7,785 1,784 61.8 61.9 1,159 1,163
7.8 1,917 1,917 63.6 63.6 1,219 1,222
8.0 2,059 2,056 65.4 65.4 1,284 1,282
Maximum % change* in kx = -3.48% for L/h = 1.4
k = 1.49% for L/h = 1.4
kb = 1.72% for L/h = 1.4
k.1 (Grinnell) - ki(Equations)
% change = x 100, i = x,y,bki(Grinnell)

34
Table 4.2
Comparison of Constants kx and kb for "U" Shape
L/h
kx kb
fromGrinnell
fromEquations
fromGrinnell
fromEquations
0.2 0.0377 0.0377 0.617 0.617
0.3 0.1165 0.1164 1.308 1.316
0.4 0.256 0.256 2.232 2.240
0.5 0.469 0.469 3.370 3.375
0.6 0.765 0.766 4.580 4.713
0.7 1.191 1.158 6.430 6.248
0.8 1.68 1.65 8.110 7.975
0.9 2.38 2.27 10.39 9.894
1.0 3.00 3.00 12.00 12.00
1.2 4.88 4.88 16.74 16.77
1.4 7.37 7.37 22.26 22.28
1.6 10.55 10.53 28.56 28.53
1.8 14.48 14.45 35.52 35.50
2.0 19.2 19.2 43.20 43.20
2.2 24.6 24.8 52.32 52.63
2.4 31.4 31.5 60.72 60.78
2.6 39.2 39.1 70.56 70.65
2.8 48.0 47.9 81.24 81.25
3.0 57.8 57.9 92.64 92.57
3.2 69.1 69.1 104.5 104.6
3.4 82.2 81.6 118.2 117.4
3.6 95.6 95.6 130.8 130.9
3.8 111.0 111.0 138.4 145.1
4.0 128.1 128.0 160.0 160.0
4.2 147.0 146.6 176.1 175.6
4.4 166.6 166.9 192.0 192.0
4.6 189.0 188.9 208.8 209.1
4.8 213.0 212.8 227.4 226.9
35
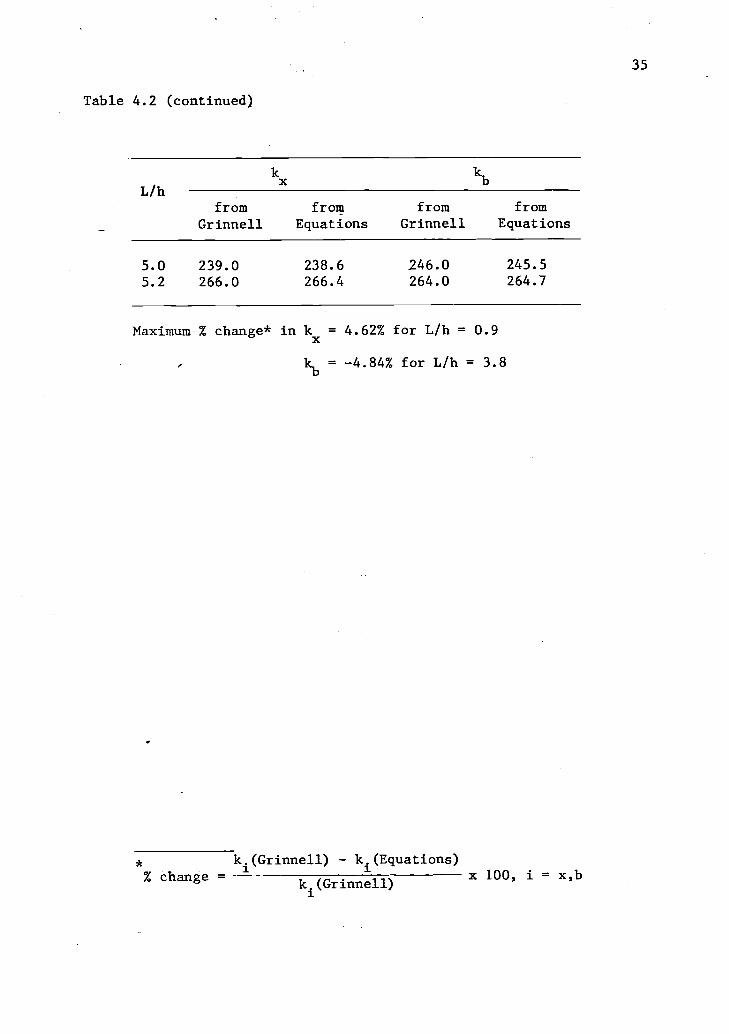
Table 4.2 (continued)
L/hkx kb
from from from fromGrinnell Equations Grinnell Equations
5.0 239.0 238.6 246.0 245.5
5.2 266.0 266.4 264.0 264.7
Maximum % change* in kx = 4.62% for L/h = 0.9
kb = -4.84% for L/h = 3.8
k.1 (Grinnell) k.(Equations)% change =
k (Grinnell)x 100, i = x,b
36
Table 4.3
Comparison of Constants kx2
k--y
and kb
for "Z" Shape; a/b = 1.0
L/h
kx
fromGrinnell
fromEquations
fromGrinnell
fromEquations
fromGrinnell
fromEquations
0.6 9.25 9.24 43.0 43.1 83.8 83.1
0.8 12.8 12.8 39.0 39.1 69.0 69.1
1.0 17.2 17.1 37.9 37.7 61.9 61.7
1.2 22.5 22.3 37.8 37.9 57.8 55.7
1.4 28.3 28.4 37.7 39.0 60.6 60.8
1.6 35.4 35.4 42.1 40.7 66.3 66.4
1.8 43.0 43.6 43..2 43.0 72.0 72.6
2.0 52.8 52.8 45.7 45.6 79.3 79.2
2.2 63.0 63.2 48.0 48.5 86.5 86.1
2.4 76.0 74.7 51.0 51.7 93.8 93.3
2.6 89.0 87.4 54.5 55.0 101.2 100.8
2.8 102 101 58.2 58.5 109.0 108.5
3.0 116 116 62.2 62.2 116.1 116.3
3.2 132 133 66.0 65.9 124.5 124.3
3.4 149 150 70.0 69.7 133.0 132.4
3.6 168 169 74.0 73.7 141.0 140.7
3.8 188 189 78.0 77.7 149.0 149.0
4.0 210 210 82.0 81.8 157.8 157.5
4.2 235 232 86.4 85.9 166.0 166.0
4.4 260 256 90.6 90.0 174.5 174.6
4.6 285 281 94.8 94.3 183.0 183.3
4.8 110 307 99.0 98.5 192.0 192.1
5.0 336 335 103.2 102.8 201.4 200.8
5.2 364 363 107.6 107.1 210.0 209.7
5.4 393 393 111.8 111.5 219.5 218.6
5.6 425 425 116.2 115.9 228.0 227.5
5.8 457 457 120.5 120.3 237.5 236.5
37
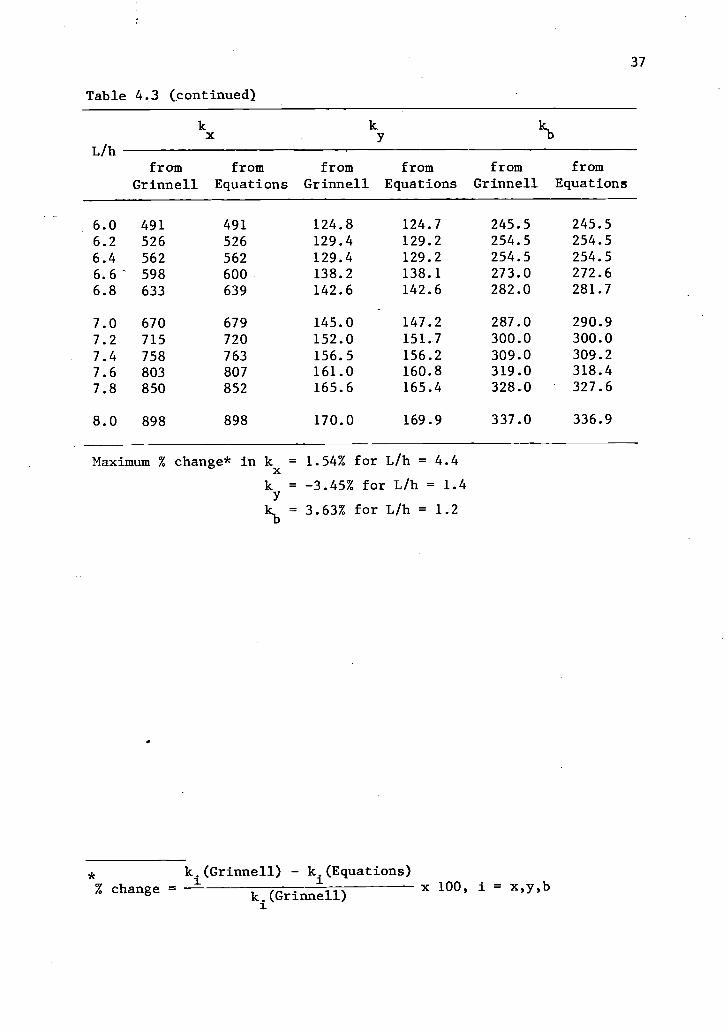
Table 4.3 (continued)
L/h
k kx kb
fromGrinnell
fromEquations
fromGrinnell
fromEquations
fromGrinnell
fromEquations
6.0 491 491 124.8 124.7 245.5 245.5
6.2 526 526 129.4 129.2 254.5 254.5
6.4 562 562 129.4 129.2 254.5 254.5
6.6- 598 600 138.2 138.1 273.0 272.6
6.8 633 639 142.6 142.6 282.0 281.7
7.0 670 679 145.0 147.2 287.0 290.9
7.2 715 720 152.0 151.7 300.0 300.0
7.4 758 763 156.5 156.2 309.0 309.2
7.6 803 807 161.0 160.8 319.0 318.4
7.8 850 852 165.6 165.4 328.0 327.6
8.0 898 898 170.0 169.9 337.0 336.9
Maximum % change* in kx = 1.54% for L/h = 4.4
k = -3.45% for L/h = 1.4ykb = 3.63% for L/h = 1.2
k.(Grinnell) - ki(Equations)% change =
k.(Grinnell)x 100, i = x,y,b
38
V. NUMERICAL CHECK
Comparison of the constants derived in the preceding section
with the ones in the Grinnell handbook reveals that the data in the
Grinnell handbook is derived by treating various pipe configurations
as statically indeterminate structures. This section summarizes the
results of a numerical check performed by using a finite element
structural analysis computer program.
A computer printout is included as a sample. All the output
is available for review but is not made a part of this report due to
its voluminous nature. A comparison of the results of the computer
output with that of calculation performed in accordance with the
Grinnell handbook proves that both are comparable with each other
with only minor variations probably due to rounding errors.
5.1 Brief Description of the Computer Program
A computer program called "Static Analysis of General Structures"
or SAGS (7) was used. A complete description of the program is
available in SAGS users' manual. A brief description of the input
preparation and interpretation of the output is as follows.
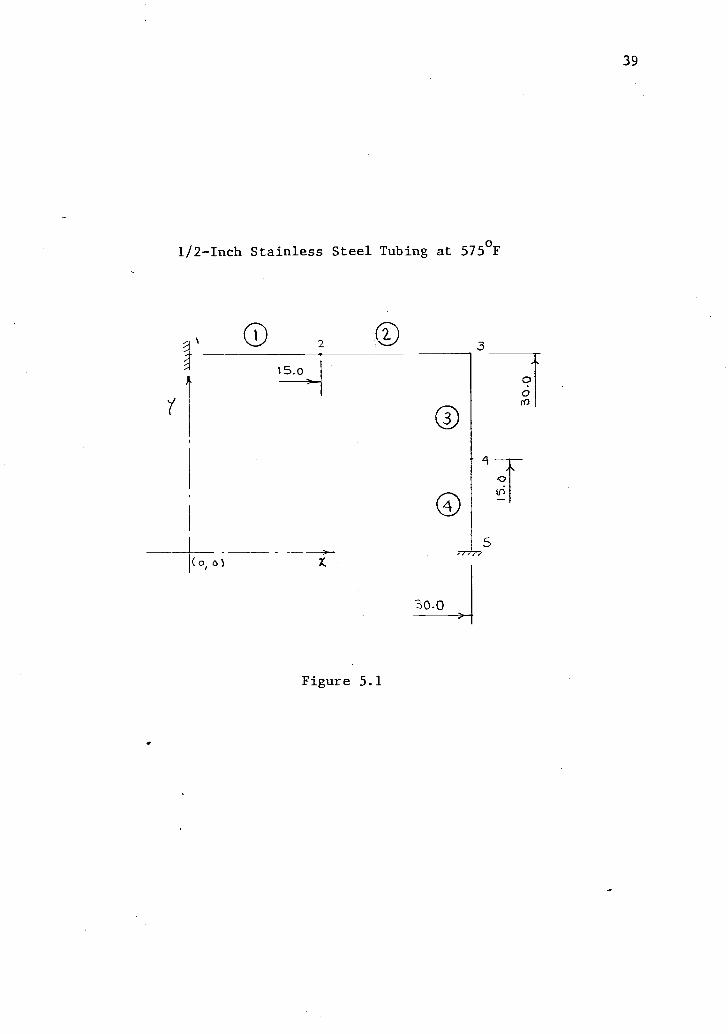
Figure 5-1 shows a typical "L" shape of 1/2 inch o.d., 0.065-inch
wall thickness stainless steel tubing subjected to 575°F. The
temperature of the surroundings is assumed to be 70°F. The piping
configuration is assigned "Joint" or "Node" numbers as shown. The
sections between joints are called "Spans" and denoted by numbers
with a circle around them to differentiate them from joint numbers.
The coordinates of the joints are determined from an origin which
can be chosen arbitrarily.
1/2-Inch Stainless Steel Tubing at 575°F
Figure 5.1
30.0
39

40
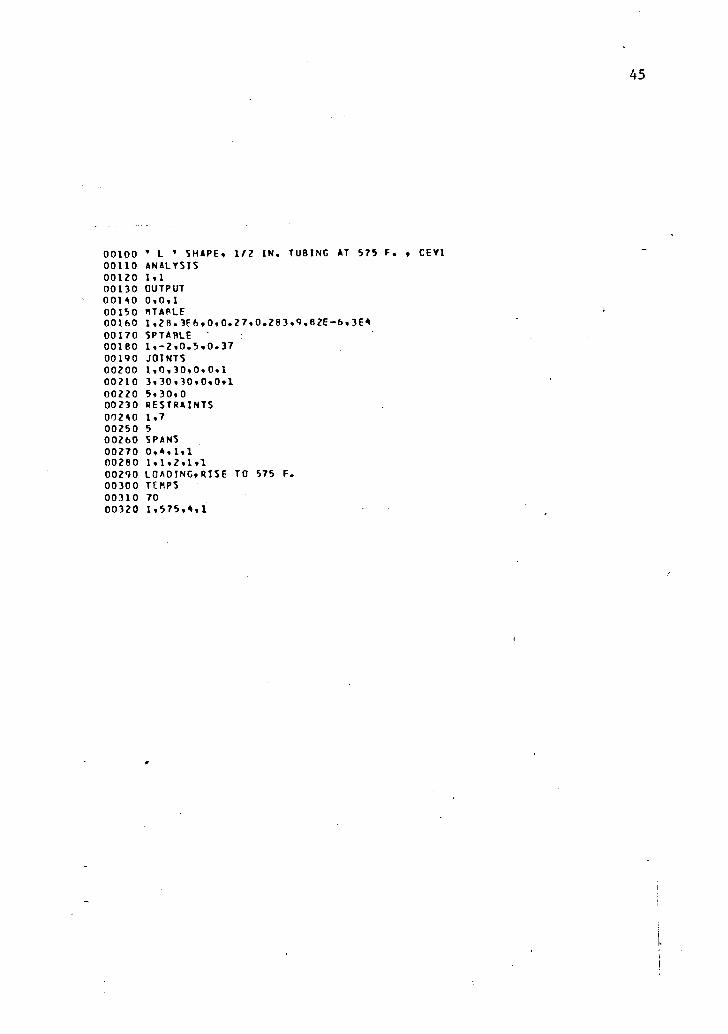
An input "file" was then prepared as follows: A title of maximum
72 characters forms a title "card" or line. The next four lines
denote the stress calculation and output printout options. Material
properties, such as Modulus of Elasticity, Poisson's Ratio, Density
and Coefficient of Linear Expansion, along with section properties,
such as outside the inside diameters, are then entered. The piping
geometry is entered by defining coordinates of all joints followed
by type and location of restraints and spans or connectivity of
joints. The final card is a loading card which specifies base tem-
perature (70°F) and design temperature (575°F). Page 45 shows a
copy of the file for L/h = 1.0 with L = 30 inches and h = 30 feet.
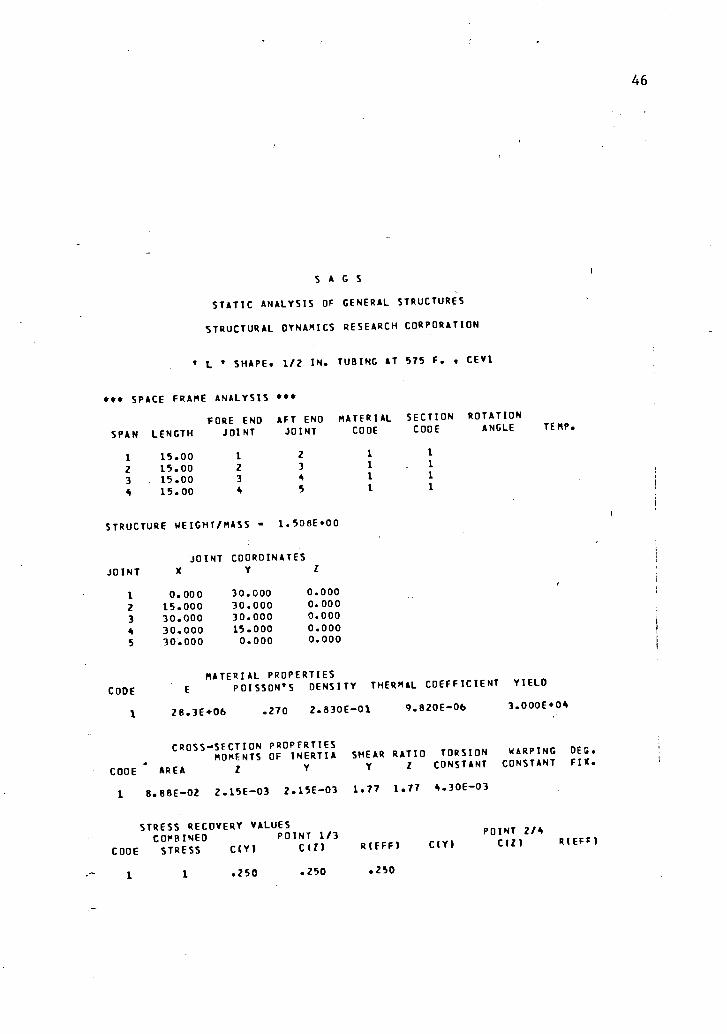
After processing this data, the computer prints out input data
(pages 46 and 47) and output results, such as joint displacements,
joint reactions and various stress components and combined stresses
(page 48). Note that the computer program takes into account
both bending and axial stresses while the Grinnell handbook method
can calculate only the bending stresses. Thus, it is expected
that joint reactions in the printout will be slightly different from
the ones calculated by using the Grinnell handbook. A more exact
computer program, such as ANSYS, can be used for a similar check, but
accuracy of "SAGS" results is sufficient for our work.
A file, such as the one shown on page 45 was prepared for each
of the three configurations as follows:
Temperature L/h Combinations
"L" Shape 575 °F 36
500°F 36
400°F 36
"U" Shape 575 °F 31
400°F 31
"Z" Shape 575 °F 38
400°F 38
Total 246
41
A hand calculation was made for each of these 246 combinations
using Grinnell handbook method (refer to Appendix A) to determine the
end reactions and stresses.
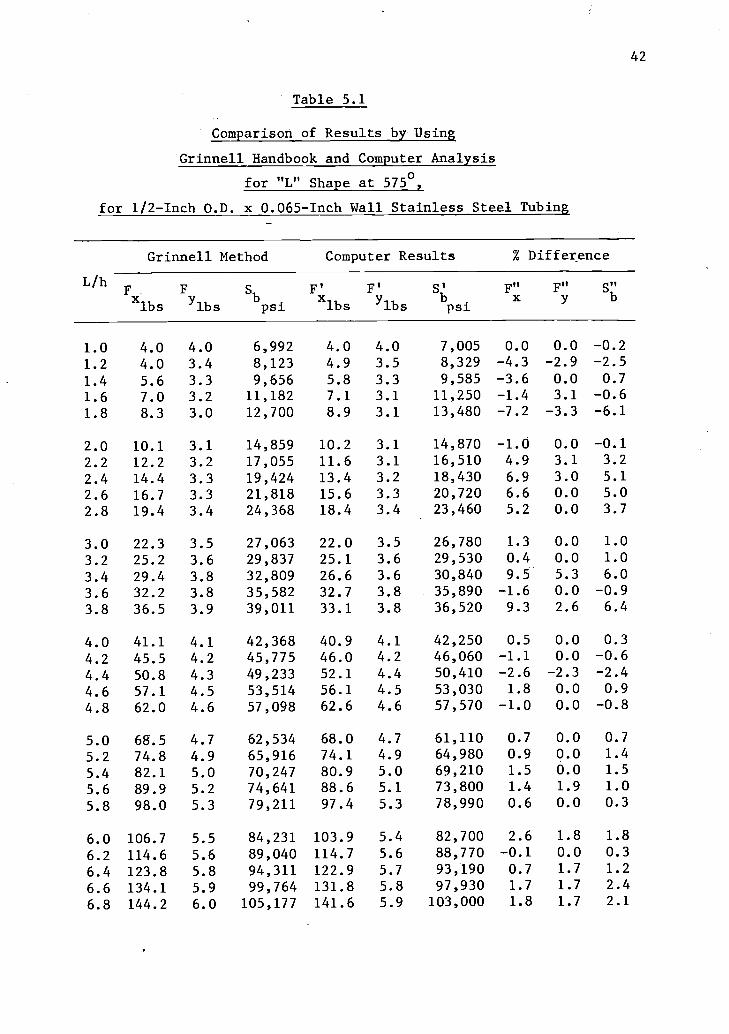
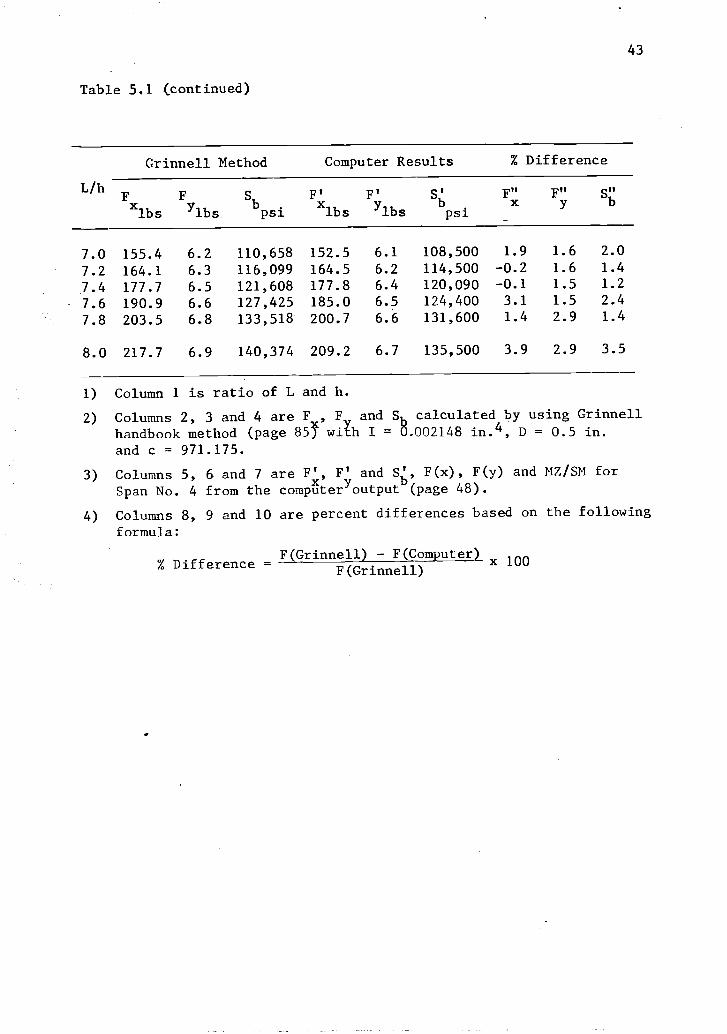
Table 5.1 shows a sample of this comparison for an "L" shape
at 575 °F.
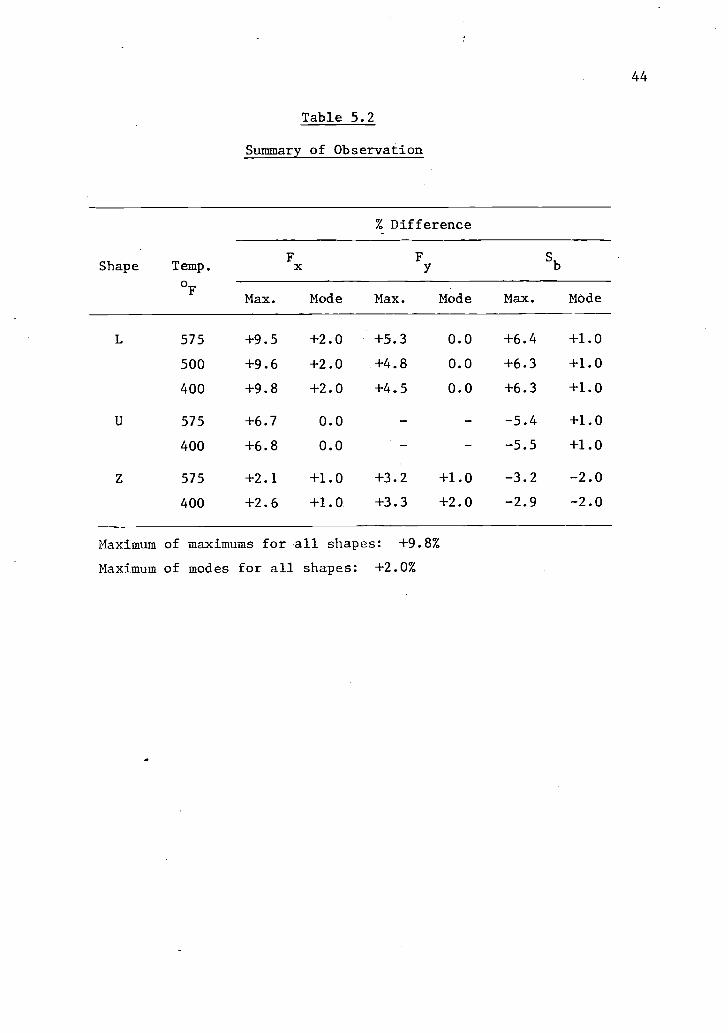
Table 5.2 shows a summary of the maximum percent difference
for all the shapes. The calculations themselves are not made a
part of this report due to the large volume but are available for
review.
It is obvious from the comparison of hand calculations based
on the Grinnell handbook and computer analysis results that the
results are essentially similar. This confirms the accuracy of
Grinnell method in general and for tubing sizes in particular. It
also proves that the expressions developed for kx, k and kb in
YSection IV of this report are correct because they yield numerical
constants similar to the Grinnell handbook. The minor differences
between computer output and hand calculations can be attributed to
the fact that computer analysis takes into account axial stresses
and computer analysis may have residual rounding errors.
42
Table 5.1
Comparison of Results by Using
Grinnell Handbook and Computer Analysis
for "L" Shape at 575°,
for 1/2-Inch 0.D. x 0.065-Inch Wall Stainless Steel Tubing
L/h
Grinnell Method Computer Results % Difference
F _ Fxlbs Ylbs
Sbpsi
F'
xlbsF'
YlbsS'bPsi
F"x
F"y
S"
1.0 4.0 4.0 6,992 4.0 4.0 7,005 0.0 0.0 -0.2
1.2 4.0 3.4 8,123 4.9 3.5 8,329 -4.3 -2.9 -2.5
1.4 5.6 3.3 9,656 5.8 3.3 9,585 -3.6 0.0 0.7
1.6 7.0 3.2 11,182 7.1 3.1 11,250 -1.4 3.1 -0.6
1.8 8.3 3.0 12,700 8.9 3.1 13,480 -7.2 -3.3 -6.1
2.0 10.1 3.1 14,859 10.2 3.1 14,870 -1.0 0.0 -0.1
2.2 12.2 3.2 17,055 11.6 3.1 16,510 4.9 3.1 3.2
2.4 14.4 3.3 19,424 13.4 3.2 18,430 6.9 3.0 5.1
2.6 16.7 3.3 21,818 15.6 3.3 20,720 6.6 0.0 5.0
2.8 19.4 3.4 24,368 18.4 3.4 23,460 5.2 0.0 3.7
3.0 22.3 3.5 27,063 22.0 3.5 26,780 1.3 0.0 1.0
3.2 25.2 3.6 29,837 25.1 3.6 29,530 0.4 0.0 1.0
3.4 29.4 3.8 32,809 26.6 3.6 30,840 9.5 5.3 6.0
3.6 32.2 3.8 35,582 32.7 3.8 35,890 -1.6 0.0 -0.9
3.8 36.5 3.9 39,011 33.1 3.8 36,520 9.3 2.6 6.4
4.0 41.1 4.1 42,368 40.9 4.1 42,250 0.5 0.0 0.3
4.2 45.5 4.2 45,775 46.0 4.2 46,060 -1.1 0.0 -0.6
4.4 50.8 4.3 49,233 52.1 4.4 50,410 -2.6 -2.3 -2.4
4.6 57.1 4.5 53,514 56.1 4.5 53,030 1.8 0.0 0.9
4.8 62.0 4.6 57,098 62.6 4.6 57,570 -1.0 0.0 -0.8
5.0 68.5 4.7 62,534 68.0 4.7 61,110 0.7 0.0 0.7
5.2 74.8 4.9 65,916 74.1 4.9 64,980 0.9 0.0 1.4
5.4 82.1 5.0 70,247 80.9 5.0 69,210 1.5 0.0 1.5
5.6 89.9 5.2 74,641 88.6 5.1 73,800 1.4 1.9 1.0
5.8 98.0 5.3 79,211 97.4 5.3 78,990 0.6 0.0 0.3
6.0 106.7 5.5 84,231 103.9 5.4 82,700 2.6 1.8 1.8
6.2 114.6 5.6 89,040 114.7 5.6 88,770 -0.1 0.0 0.3
6.4 123.8 5.8 94,311 122.9 5.7 93,190 0.7 1.7 1.2
6.6 134.1 5.9 99,764 131.8 5.8 97,930 1.7 1.7 2.4
6.8 144.2 6.0 105,177 141.6 5.9 103,000 1.8 1.7 2.1
43
Table 5.1 (continued)
L/h
Grinnell Method Computer Results % Difference
F F Sb x
F' F' 5' F" F" S"xlbs Ylbs psi lbs Ylbs bpsi
7.0 155.4 6.2 110,658 152.5 6.1 108,500 1.9 1.6 2.0
7.2 164.1 6.3 116,099 164.5 6.2 114,500 -0.2 1.6 1.4
7.4 177.7 6.5 121,608 177.8 6.4 120,090 -0.1 1.5 1.2
7.6 190.9 6.6 127,425 185.0 6.5 124,400 3.1 1.5 2.4
7.8 203.5 6.8 133,518 200.7 6.6 131,600 1.4 2.9 1.4
8.0 217.7 6.9 140,374 209.2 6.7 135,500 3.9 2.9 3.5
1) Column 1 is ratio of L and h.
2) Columns 2, 3 and 4 are F , F, and Sh calculated by using Grinnellhandbook method (page 855 with I = 6.002148 in.4, D = 0.5 in.
and c = 971.175.
3) Columns 5, 6 and 7 are F', F' and Si), F(x), F(y) and MZ/SM for
Span No. 4 from the computerYoutput (page 48).
4) Columns 8, 9 and 10 are percent differences based on the following
formula:
DifferenceF(Grinnell) - F(Computer)
x 100% F(Grinnell)
44
Table 5.2
Summary of Observation
Shape Temp.
of
% Difference
Fx Fy
Sb
Max. Mode Max. Mode Max. MOde
L 575 +9.5 +2.0 +5.3 0.0 +6.4 +1.0
500 +9.6 +2.0 +4.8 0.0 +6.3 +1.0
400 +9.8 +2.0 +4.5 0.0 +6.3 +1.0
U 575 +6.7 0.0 -5.4 +1.0
400 +6.8 0.0 -5.5 +1.0
Z 575 +2.1 +1.0 +3.2 +1.0 -3.2 -2.0
400 +2.6 +1.0 +3.3 +2.0 -2.9 -2.0
Maximum of maximums for all shapes: +9.8%
Maximum of modes for all shapes: +2.0%
45
00100 ' L SHAPE. 112 IN. TUBING AT 575 F. CEV100110 ANALYSIS00120 1,100130 OUTPUT00140 0,0.100150 MTAPLE00160 1,28.3E6.0.0.27.0.283,9.82E-6,3E400170 SPTARLE00180 1.-20.5.0.3700190 JOINTS00200 1.0.30.0.0.100210 3,30,30,010.100220 5,30,000230 RESTRAINTS00240 1,700250 5
00260 SPANS00270 0,4,1,100280 1,1,2,1,100290 LOADING,RISE TO 575 F.00300 TEMPS00310 7000320 1,575,4,1
46
SAGSSTATIC ANALYSIS OF GENERAL STRUCTURES
STRUCTURAL DYNAMICS RESEARCH CORPORATION
L SHAPE. 1/2 IN. TUBING AT 575 F. , CEV1
*to, SPACE FRAME ANALYSIS e'
FORE END AFT END MATERIAL SECTION ROTATION
SPAN LENGTH JOINT JOINT CODE CODE ANGLE TEMP.
1 15.00 1 2 1 1
2 15.00 2 3 1 1
3 15.00 3 4 1 1
4 15.00 4 5 1 1
STRUCTURE WEIGHT/MASS 4 1.508E400
JOINT COORDINATESJOINT
1 0.000 30.000 0.000
2 15.000 30.000 0.000
3 30.000 30.000 0.000
4 30.000 15.000 0.000
5 30.000 0.000 0.000
MATERIAL PROPERTIES
CODE E POISSON'S DENSITY THERMAL COEFFICIENT YIELD
28.3E406 .270 2.830E-01 9.820E-06 3.000E404
CROSS- .SECTION PROPERTIESMOMENTS OF INERTIA SHEAR RATIO TORSION WARPING DEG.
CODE AREA 1 Y Y 2 CONSTANT CONSTANT FIX.
1 8.88E-02 2.15E-03 2.15E-03 1.77 1.77 4.30E-03
STRESS RECOVERY VALUESCOMBINED POINT 1/3 POINT 2/4
CODE STRESS CIY) CII) RIEFF) CIY) CIII RIEFF)
1 1 .250 .250 .250

47
SFLEA00 01/19/81 17.09.18.
STATIC ANALYSIS OF GENERAL STRUCTURESL SHAPE, 1/2 IN. TUBING AT 575 F. CEY1
SPECIFIED RESTRAINTSJOINT DIRECTION VALUE
1 1234565 123156
LOADING NO. 1: RISE TO 575 F.
TEMPERATURE LOADING
REFERENCE TEMPERATURE 70.
SPAN TEMPERATURE FINAL SPAN INCREMENT
1 575. 1
TOTAL APPLIED FORCES:F(X) O. F(Y) - O.

48
SAGSSTATIC ANALYSIS OF GENERAL STRUCTURES
STRUCTURAL DYNAMICS RESEARCH CORPORATION
L ' SHAPE. 112 IN. TUBING AT 575 F. CEV1
*** LOADING NO. 1 RISE TO 575 F.
JOINT DISPLACEMENTSJOINT X r 1 THETAIXI THETAIYI .THETAIII
1 O. O. O. O. O. O.
2 7.436E-02 7.436E-02 O. O. O. 7.425E-03
3 1.487E-.01 1.487E-01 O. O. O. -2.776E-174 7.436E -02 7.436E-02 O. O. O. -7.425E-03
5 O. O. O. O. O. O.
JOINTJOINT REACTIONSFIX) F(Y) FII/ MIX) MIYI MII)
1 4.012E+00 -4.012E+00 O. O. O. -6.018E+01
5 -4.012E+00 4.012E+00 O. O. O. 6.018E+01
TOTAL 2.206E-11 -1.526E-10 O.
STRESS CALCULATIONS
0. 0. -9.095E-13
YIELD
SPAN END MIFSM MY/SM P/A SHEAR COMBINED RAIIO
1 FORE -7.005E+03 O.
2 AFT 7.005E+03 O.
3 FORE 7.005E+03 O.4 AFT -7.005E+03 O.
-4.517E+01 O. 7.050F+03 .23- 4.517E+01 O. 7.050E+03 .23- 4.517E+01 O. 7.050E+03 .23- 4.517E+01 O. 7.050E+03 .23
MAXIMUM STRESS * 7.050E+03 ON SPAN 1
49
VI. DEADWEIGHT AND SEISMIC ANALYSIS
A piping system has to conform to more than one stress criteria.
Section V dealt with thermal stresses. In addition to thermal stress,
a piping system will be subjected to stresses due to deadweights of
piping and its contents, e.g., fluids and insulation, and additional
stresses due to seismic forces.
The Grinnell handbook does not detail methods for such analyses
except for stresses due to deadweight on straight pipe runs. It is
common practice to reduce the span lengths used for straight runs
around a pipe bend. This is done to account for out-of-plane bending.
This section develops a relationship to determine deadweight and
seismic stresses for "L" and "U" configurations and a relationship
to determine similar stresses for "L" configurations with a concen-
trated load (e.g., a valve) on the pipe. Note that in most high-
temperature piping, thermal stresses are more critical than dead-
weight or seismic stresses. However, for so-called "cold" piping,
seismic stresses may be higher and control the design. Thus, the
methods described in this section may not find a wide application
but will may be helpful in isolated cases for quick "cookbook" type
checks.
The slope-deflection method described in Section III is used
to develop the equations. These equations are checked for accuracy
by comparing them to literature in text, such as "Rigid Frame
Formulas" (8), and numerical checks by using computer analysis.

50
VI.A. Deadweight and Seismic Stresses on a "L" Shape
6.1 Review of Slope-Deflection Method
Before we proceed to develop a relationship for a "L" configura-
tion, it is worth recapitulating a summary of slope-deflection method
and especially Eq. (3.3.4).
Figure 6.1 shows a beam AB fixed at both ends A and B.
Assuming that there is no settlement at A and B, the end moments
MAB and MBA can be determined by using Eq. (3.2.4), i.e.,
2EI(28 +
MAB MFAB L A °B)
if settlements at A or B exist and are known, Eq. (3.2.3) instead
of (3.2.4) can be used.
6.2 General Method of Solution
1. Assume each leg or member of the configuration to be fixed
at both ends.
2. Determine intermediate external moment (MFAB or NBA) by
using simple beam formulae.A reference, such as "Formulas
for Stress and Strain" by R. Roark (9) is useful.
3. Using Eq. (3.2.4), determine end moments for each leg or
beam.
4. For unrestrained ends of the configurations, the ends are
free to rotate and the sum of moments at those ends

eeA
Figure 6.1
A.
51

52
is zero. This will give the rotation angle (0) for that
end.
5. Substitute this value in the relation for moments at fixed
ends to get those moments in terms of known parameters.
6.3 Derivation for "L" Configurations
Figure 6.2 shows an "L" shape with leg AB vertical and leg BC
horizontal.
Let the weight of the pipe and its contents be w lbs/unit length
and n be the load factor or acceleration due to seismic forces. For
only deadweight analysis n=1.0.
Consider leg AB.
MFAB °= 0, OB = 0B and L = h
using the slope-deflection method Eq. (3.2.4),
and
m 2E1AB
{2(0)+(-0B
2E10B
(
2(-
4EBMBA
02E1
t(3B)+14IO
Consider leg BC.
nwL2
MFAB MFBC 12 '
nwL2
2E1m --BC 12 L ( 2e
B)
nwL2
4E10+ B
12 L
ec = 0
(6.1)
(6.2)
(6.3)
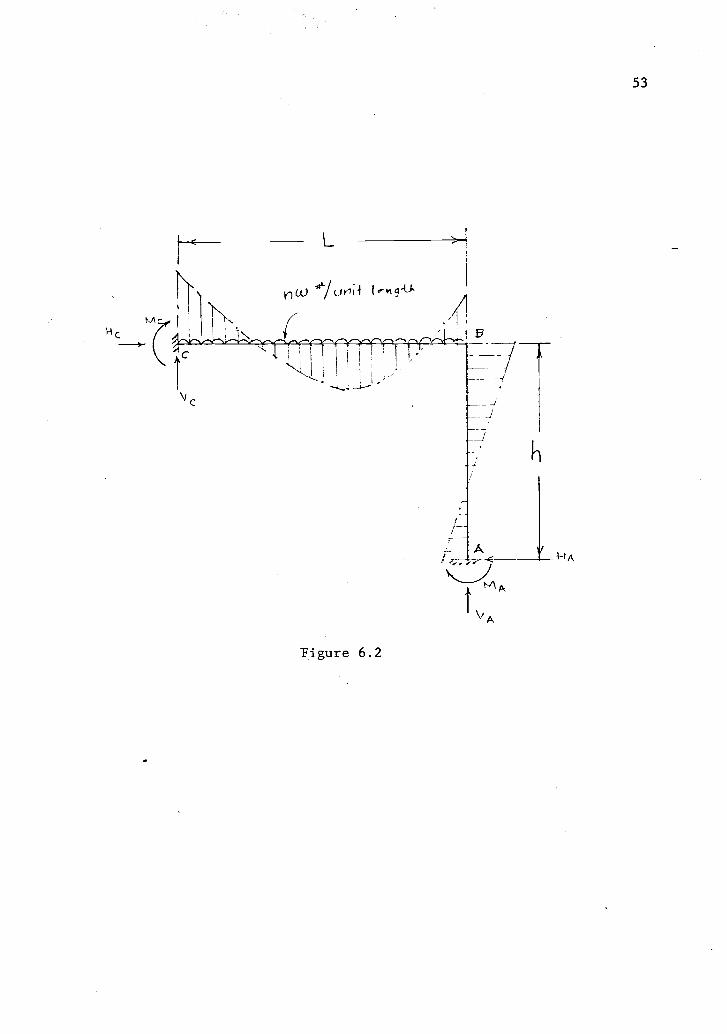
Figure 6.2
4-t A
53
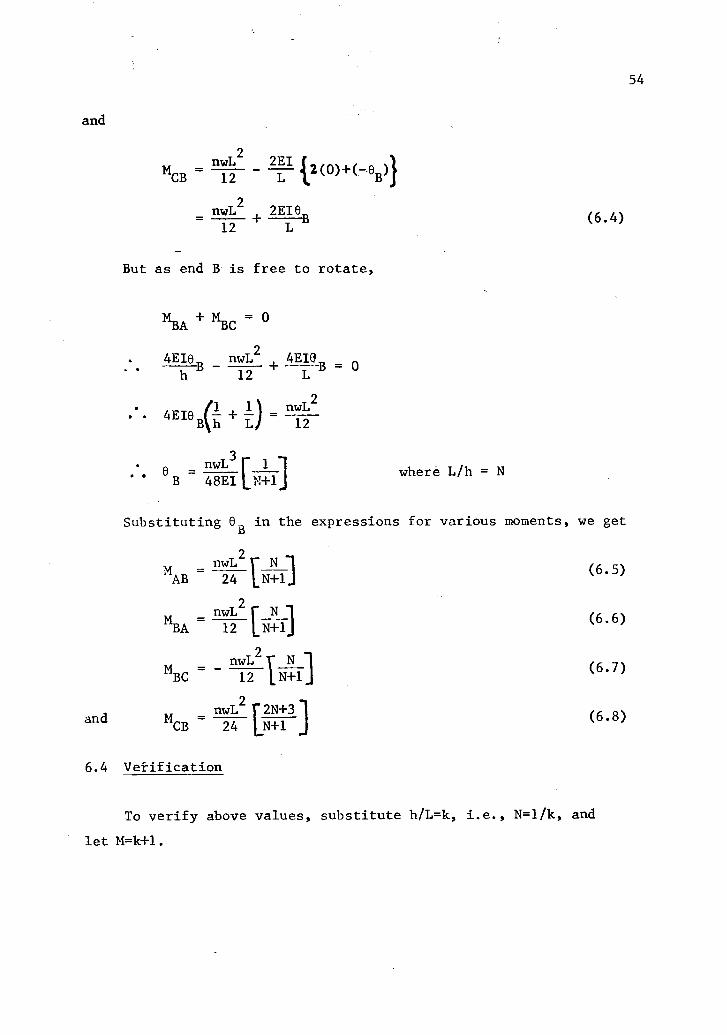
54
and
and
MCB
n=
2EI2(0)+( -.0
B)1
wL12
2
nwL2
2E10
12+
But as end B is free to rotate,
MBA MBC
4E1BB
nwL2
4E1.9B = 0
12
1 1) nwL24E1B
B he +
L 12
nwL3 r
B 48E1 L N-F-1where L/h = N
(6.4)
Substituting BB in the expressions for various moments, we get
nwL2
N-1(6.5)
MAB 24 N+lj
nwL2 r N 1
MBA 12 LN+ij(6.6)
nwL2 i N
MBC 12 I.N+1]
(6.7)
nwL2
j. (6.8)MCB 24 N+1
6.4 Verification
To verify above values, substitute h/L=k, i.e., N=1/k, and
let M=k+1.
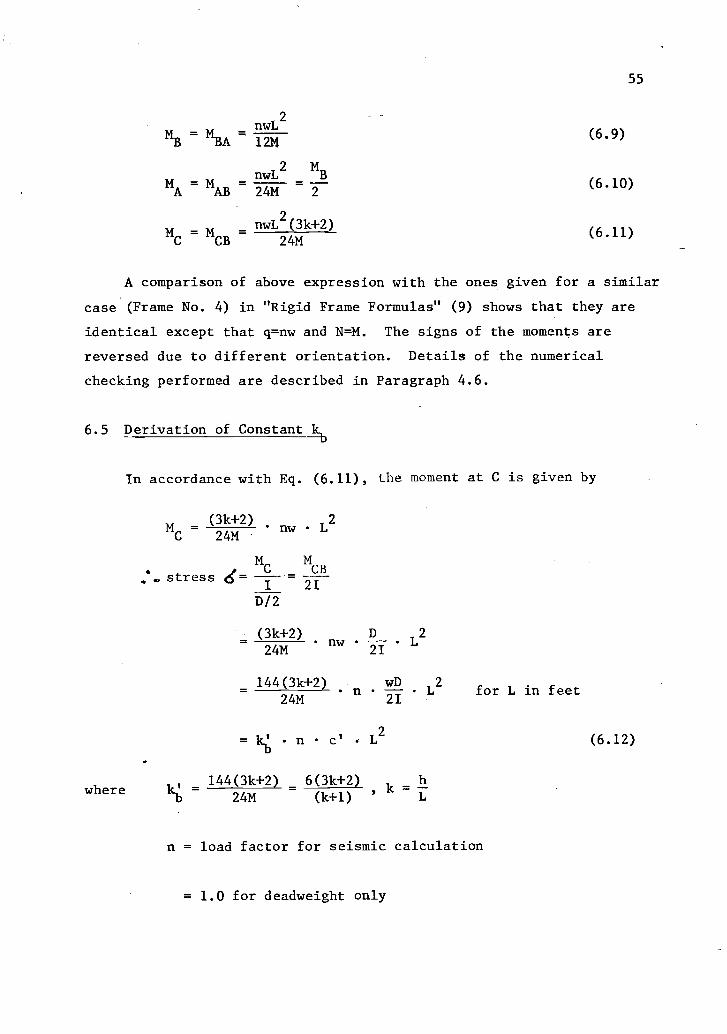
nwL2
MB MBA 12M
nwL2 M
BM = M = =A AB 24M 2
nwL2(3k+2)M = M
C CB 24M
55
A comparison of above expression with the ones given for a similar
case (Frame No. 4) in "Rigid Frame Formulas" (9) shows that they are
identical except that q=nw and N=M. The signs of the moments are
reversed due to different orientation. Details of the numerical
checking performed are described in Paragraph 4.6.
6.5 Derivation of Constant kb
where
In accordance with Eq. (6.11), the moment at C is given by
(3k+2)M = nw L
2
C 24M
Mc CB
stress (=I 21
D/2
(3k+2)nw
ifL2
24M
144(3k+2)n
EDL
24M 21
= ki') n c' L2
144(3k+2) 6(3k+2)ki10
24M (k+1) '
k = E
for L in feet
n = load factor for seismic calculation
= 1.0 for deadweight only
(6.12)

56
, wc =-
D= constant based on sectional properties of
pipe/tubing
L = length in feet
Numerical values for kit) are shown in Table 6.1.
Table 6.1
L/h 1.0 2.0 3.0 4.0 5.0 6.0 7.0 8.0
kb 15.000 14.000 13.500 13.200 13.000 12.857 12.750 12.667
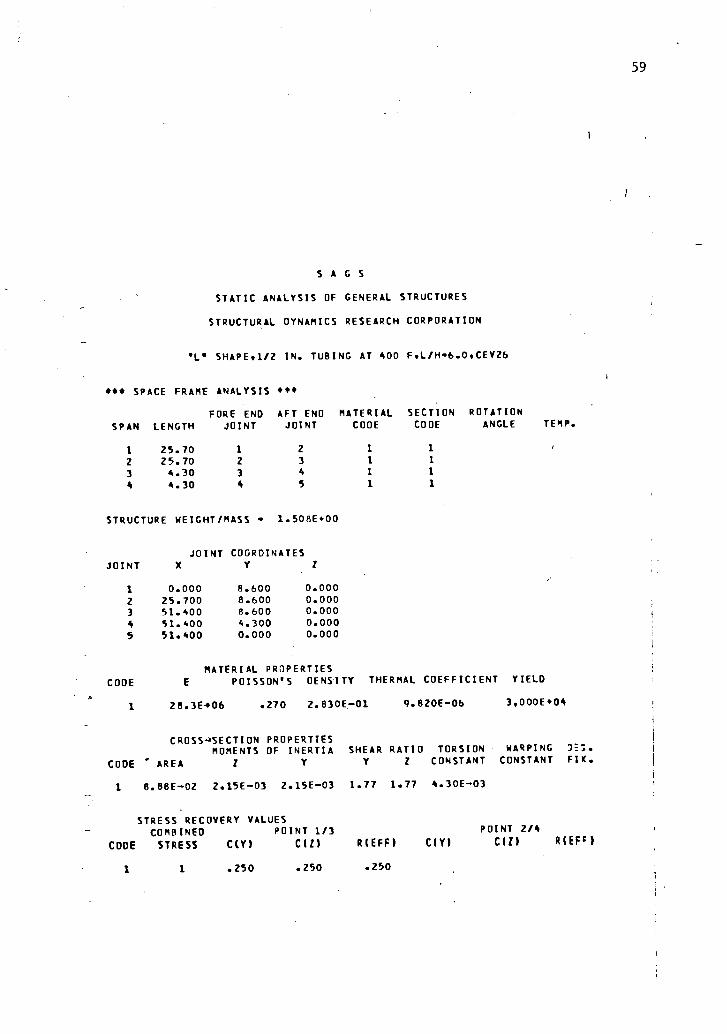
6.6 Numerical Check
An "L" configuration similar to Figure 6.1 with L+h = 60 inches
and L/h = 1.0 through 8.0 was checked for 10G (n=10) loading on a
SAGS (7) computer program.
Comparison of hand calculation using Eq. (6.12) and computer
program is shown in Table 6.2.
6.7 Constants for Reactions at the Fixed Ends
An expression for end reactions can be derived for end reactions
based on the formulae given in Reference (8). However, those are
not derived for the following reasons:
1. Reactions due to dead weight or seismic loading are
negligible as compared to the reactions due to thermal
conditions, e.g., a 10-foot run of 1/2-inch diameter
tubing weighs only 3 pounds, thus, giving rise to a
reaction of about 1.5 pounds on each support.

57
2. For the above reason, the utility of constants for
deadweight is marginal.
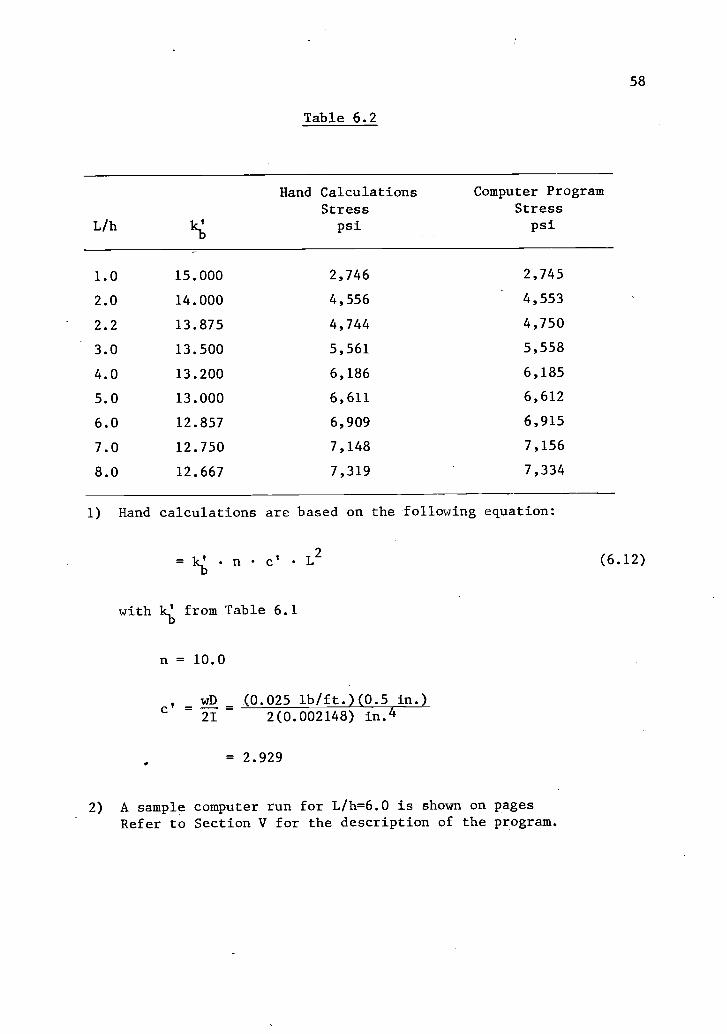
Table 6.2
L/h 1c13:
Hand CalculationsStress
psi
Computer ProgramStresspsi
1.0 15.000 2,746 2,745
2.0 14.000 4,556 4,553
2.2 13.875 4,744 4,750
3.0 13.500 5,561 5,558
4.0 13.200 6,186 6,185
5.0 13.000 6,611 6,612
6.0 12.857 6,909 6,915
7.0 12.750 7,148 7,156
8.0 12.667 7,319 7,334
1) Hand calculations are based on the following equation:
= kit) n c' L
with 1(1'3 from Table 6.1
n = 10.0
2
, wD (0.025 lb/ft.)(0.5 in.)c 21 2(0.002148) in.4
= 2.929
A sample computer run for L/h=6.0 is shown on pagesRefer to Section V for the description of the program.
58
(6.12)
A
SAGSSTATIC ANALYSIS OF GENERAL STRUCTURES
STRUCTURAL DYNAMICS RESEARCH CORPORATION
SHAPE.1/2 IN. TUBING AT 400 F.L/H6.0.CEV26
SPACE FRAME ANALYSIS
FORE END AFT END MATERIAL SECTION ROTATION
SPAN LENGTH JOINT JOINT CODE CODE ANGLE TEMP.
1 25.70 1 2 1 1
2 25.70 2 3 1 1
3 4.30 3 4 1 1
4 4.30 4 5 1 1
STRUCTURE WEIGHT/MASS 1.508E+00
JOINT COORDINATESJOINT X
1 0.000 8.600 0.0002 25.700 8.600 0.0003 51.400 8.600 0.0004 51.400 4.300 0.0005 51.400 0.000 0.000
MATERIAL PROPERTIESCODE E POISSON'S DENSITY THERMAL COEFFICIENT YIELD
1 28.3E406 .270 2.830E-01 9.820E-06 3.000E+04
CROSS - 'SECTION PROPERTIESMOMENTS OF INERTIA SHEAR RATIO TORSION WARPING
CODE ' AREA I Y Y Z CONSTANT CONSTANT FIX.
1 8.88E-02 2.15E-03 2.15E-03 1.77 1.77 4.30E-03
STRESS RECOVERY VALUESCOMBINED POINT 1/3 POINT 2/4
CODE STRESS C(Y1 Cu) RIEFFI C(Y) RUM
1 1 .250 .250 .250
1
59

60
SFLIAOA 01/19/81 17.05.39.
STATIC ANALYSIS OF GENERAL STRUCTURES'L. SHAPE91/2 IN. TUBING AT 400 F9L/H=6.09CEV26
SPECIFIED RESTRAINTSJOINT DIRECTION VALUE
1 1234565 123456
LOADING NO. t 10 G LOAD IN Y DIRN.
ACCELERATION LOADINGA(X) O. A:Y1 - 1.000E.01 4(Z) - O.
TOTAL APPLIED FORCES:FIX/ O. F(Y1 - 1.508E+01 FtI) O.

61
SAGSSTATIC ANALYSIS OF GENERAL STRUCTURES
STRUCTURAL DYNAMICS RESEARCH CORPORATION
61. SHAPE,1/2 IN. TUBING AT 400 F9L/H6.0.CE1/26
LOADING NO. 1 10 G LOAD IN Y
JOINT DISPLACEMENTSJOINT X Y
1 O. O. O.
2 8.332E-05 8.639E-02 O.
3 1.666E-04 2.499E-05 O.
4 -1.766E-03 1.342E-05 O.
5 0. 0. 0.
DIRN.
2 THETA(X) THETA(Y) THUMP
O. O. O.O. O. 4.302E-04O. O. -1.721E-03O. O. 3.792E-040. 0. 0.
.JOINT REACTIONSJOINT F(X) F(Y) m(XI MIYI MUT
1 -8.150E400 -6.698E+00 0. 0. O. -5.942E.Ca5 8.150E+00 -8.385E+00 O. O. O. -2.288E401
TOTAL -3.411E-13 -1.508E+01 O. 0. 0. -8.230E41
STRESS CALCULATIONSYIELD
SPAN END MZ/SM MY/SM P/A SHEAR COMBINED RATIO
1 FORE -6.915E+03 O. 9.175E+01 O. 7.007E+03 .23
2 AFT -5.494E403 O. 9.175E+01 O. 5.586E+03 .19
3 FORE -5.494E+03 O. 7.006E+01 O. 5.564E+03 .19
4 AFT 2.663E+03 O. 9.439E+01 O. 2.758E+03 .09
MAXIMUM STRESS * 7.007E+03 ON SPAN 1

62
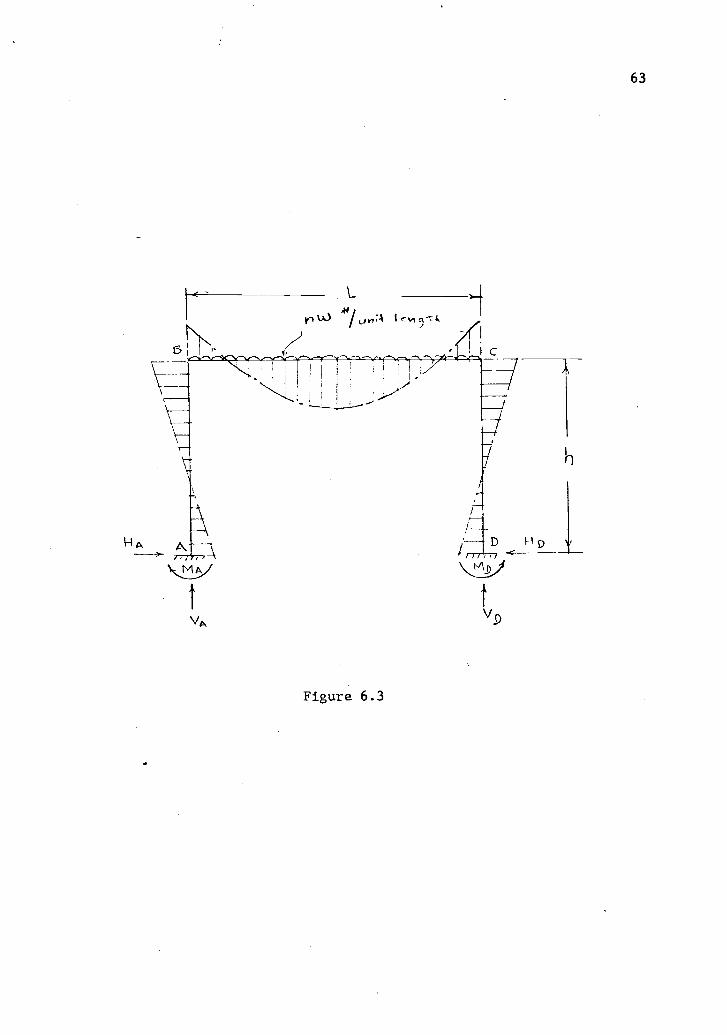
VI.B. Deadweight and Seismic Analysis for "U" Shape
6.8 Derivation for "U" Shape
Consider a "U" configuration of piping or tubing as shown in
Figure 6.3 with legs AB and CD vertical and leg BC horizontal.
Assume that leg BC is acted upon by a uniform force of magnitude
nw #/unit length where n represents a load factor during seismic
conditions. For consideration of deadweight only n=1.0. Slope-
deflection method will be used to derive the relationship similar to
the one used in Paragraph 6.3.
The general slope-deflection equation is:
2E1
MAB MFAB L(28
A+6
B)
Consider leg AB,
and
MFAB MFBA = 0
2EIeBMme=
4E16B
MBA
Consider leg BC,
and
MFBC MFCB
nwLM=BC 12
MCB
2
nwL2
12
2E1(20B-6c)
L = h
nwL2
2E1_L (-26C+811)12
(6.13)
(6.14)
HA
44/i-cv.11-tA
.....1111111... 1.41M.....m. Alb
I
h
Figure 6.3
fv9
63
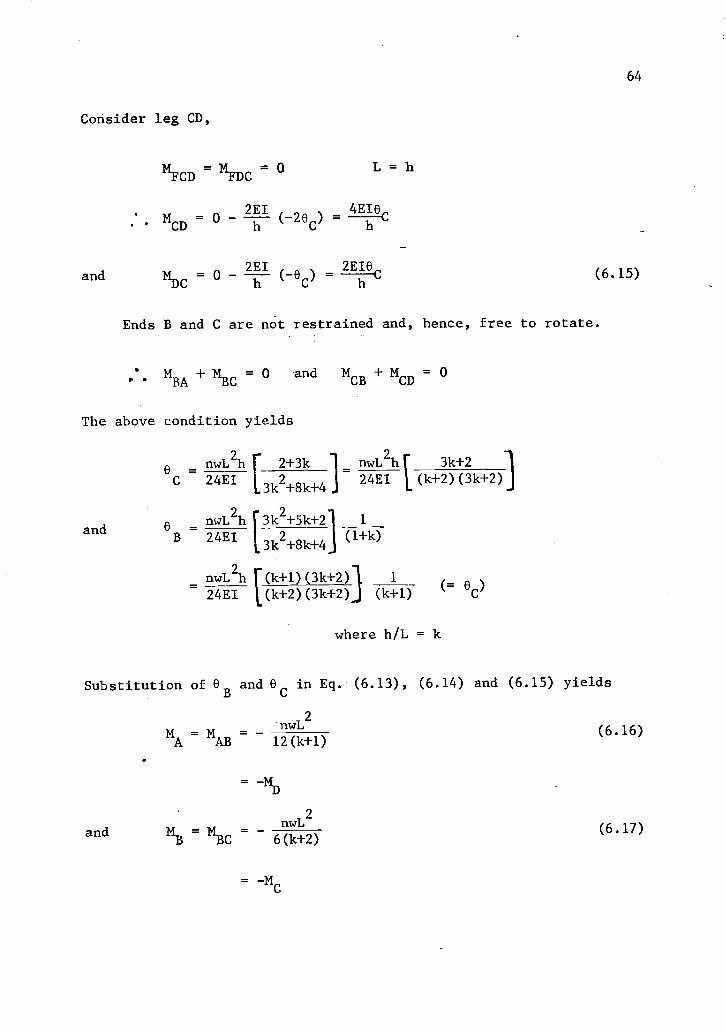
Consider leg CD,
and
HFCD MFDC 0L = h
MCD
2E1= 0 - ( 2e C)
4E16----c
.
2 2E16
HDC °
E1( e ) ----c
64
(6.15)
Ends B and C are not restrained and, hence, free to rotate.
.s. MBA + MBc = 0 and MCB MCD 0
The above condition yields
and
nwL2h 2+3k 1_ nwL
2h[ 3k+2
24E1 (k+2)(3k+2)C 24E13k
2+8k+4
6 nwL2h [3k2+5k+2 1
B 24E13k
2+8k+4
(1 +k)
nwL2h [(k+1)(3k+2)1 1
24E1 (k+2)(3k+2) -(+1) (= OC)
where h/L = k
Substitution of eB
and ecin Eq. (6.13), (6.14) and (6.15) yields
and
nwL2
MA NAB 12(k+1)
nwLMB
HBC 6(k+2)
=-HC
(6.16)
(6.17)
65
Comparison of these equations with the ones for Frame 4 in Refer-
ence (8) shows that these equations are identical except that n=1.0,
and k+2=N1.
Maximum moment M =8 6(k+2)
nwL2
nwL2
= nwL2 [1
8 6(k1+2)1
nwL2[3k+6-4]
24 (k+2)
nwL2 3k+224 k+2
Maximum stress 4Cmaximum M
section modulus
nwL2
3k+2 D
24 k+2 21
for k z 1.0
or L/h s 1.0
k = h/L
1 (3k+2) wD 2---24 (k+2)
n TE L
6(3k+2) wD ,2
(k+2) 21for L in feet
for k < 1.0 or L/h > 1.0, maximum moment is at B.
nwL2
MB 6(k+2)
nwL2Maximum 6 =
nwL6(k+2) 21
1 wD= - n6(k+2) 21
k = h/L < 1.0
24
(k+2) 21
wD= n L2 for L in feet
. n c' L2
(6.18)
66
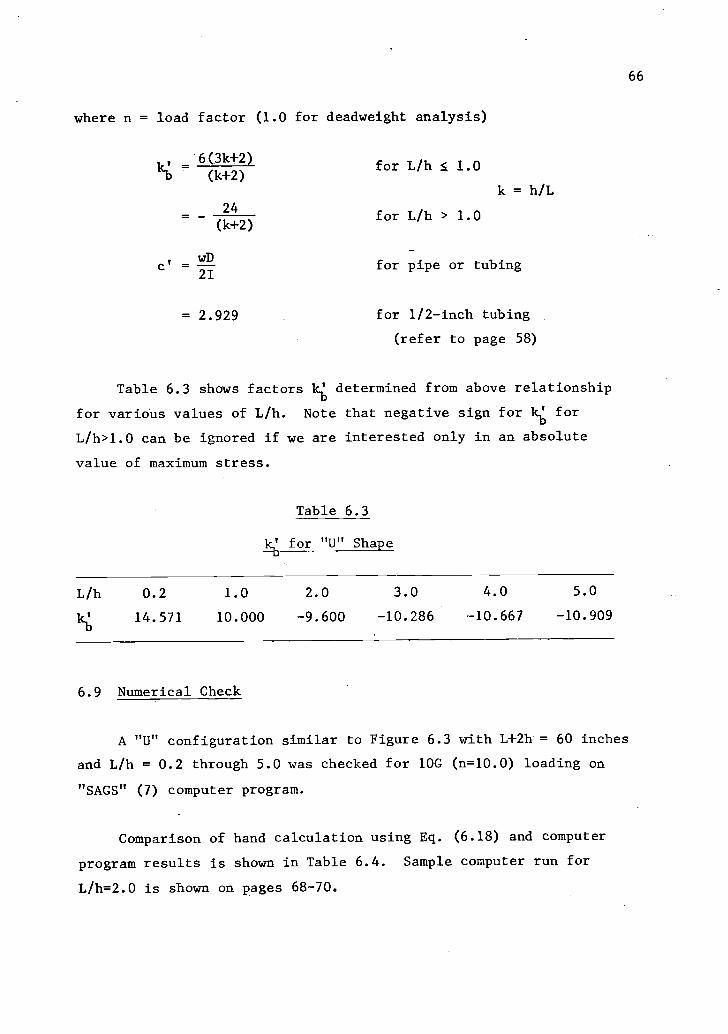
where n = load factor (1.0 for deadweight analysis)
6(3k+2)
(k+2)
_ 24
(k+2)
wDc -
21
for L /h .S 1.0
k = h/L
for L/h > 1.0
for pipe or tubing
= 2.929 for 1/2-inch tubing
(refer to page 58)
Table 6.3 shows factors kb determined from above relationship
for various values of L/h. Note that negative sign for kb for
L/h>1.0 can be ignored if we are interested only in an absolute
value of maximum stress.
Table 6.3
for "U" Shape
L/h 0.2 1.0 2.0 3.0 4.0 5.0
il14.571 10.000 -9.600 -10.286 -10.667 -10.909
6.9 Numerical Check
A "U" configuration similar to Figure 6.3 with L+2h = 60 inches
and L/h = 0.2 through 5.0 was checked for 10G (n=10.0) loading on
"SAGS" (7) computer program.
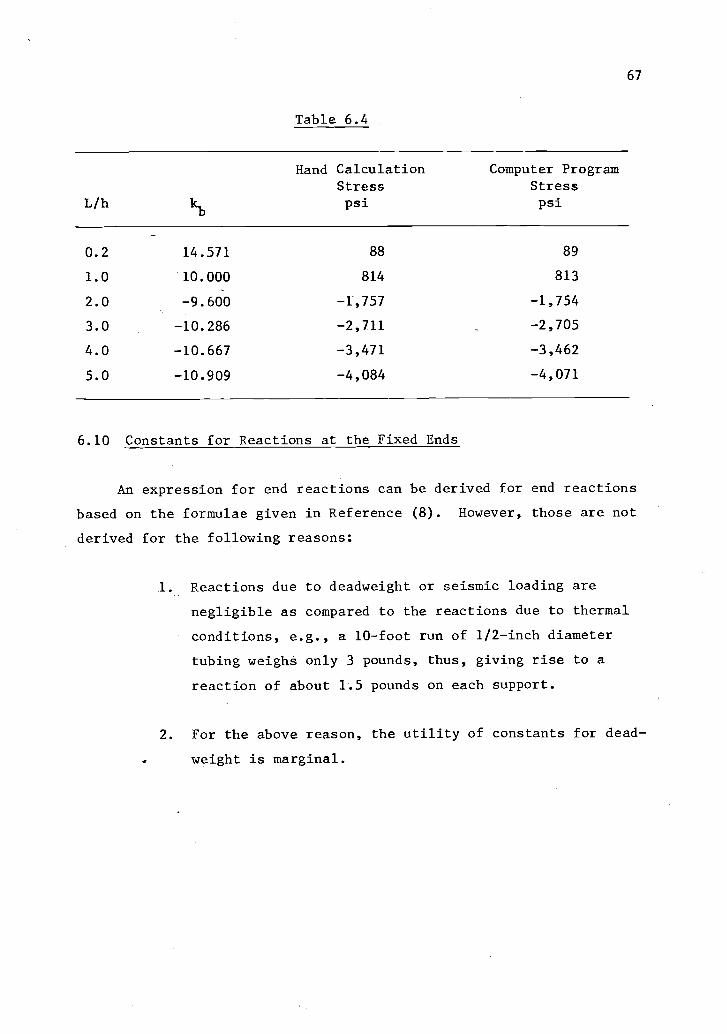
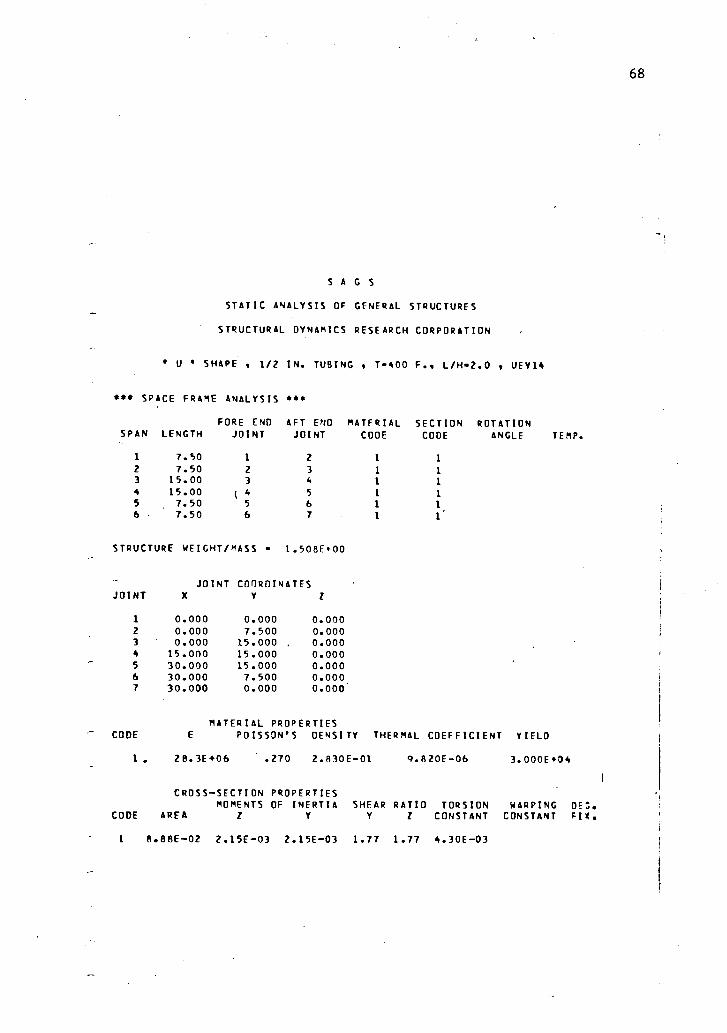
Comparison of hand calculation using Eq. (6.18) and computer
program results is shown in Table 6.4. Sample computer run for
L/h=2.0 is shown on pages 68-70.
67
Table 6.4
L/h
Hand CalculationStresspsi
kb
Computer ProgramStresspsi
0.2 14.571 88 89
1.0 10.000 814 813
2.0 -9.600 -1,757 -1,754
3.0 -10.286 -2,711 -2,705
4.0 -10.667 -3,471 -3,462
5.0 -10.909 -4,084 -4,071
6.10 Constants for Reactions at the Fixed Ends
An expression for end reactions can be derived for end reactions
based on the formulae given in Reference (8). However, those are not
derived for the following reasons:
1. Reactions due to deadweight or seismic loading are
negligible as compared to the reactions due to thermal
conditions, e.g., a 10-foot run of 1/2-inch diameter
tubing weighs only 3 pounds, thus, giving rise to a
reaction of about 1.5 pounds on each support.
2. For the above reason, the utility of constants for dead-
weight is marginal.
68
SAGSSTATIC ANALYSIS OF GENERAL STRUCTURES
STRUCTURAL DYNAMICS RESEARCH CORPORATION
U SHAPE 1/2 IN. TUBING 11 T -400 F.. L /H -2.0 9 UEV14
. SPACE FRAME ANALYSIS
FORE END AFT END MATERIAL SECTION ROTATIONSPAN LENGTH JOINT JOINT CODE CODE ANGLE TEMP.
1 7.50 1 2 i. 1
2 7.50 2 3 1 13 15.00 3 4 1 14 15.00 t 4 5 1 15 7.50 5 6 1 1
6 7.50 6 7 1 1'
STRUCTURE WEIGHT/MASS 1.508E+00
JOINT COORDINATESJOINT
1 0.000 0.000 0.0002 0.000 7.500 0.0003 0.000 15.000 . 0.0004 15.000 15.000 0.0005 30.000 15.000 0.0006 30.000 7.500 0.0007 30.000 0.000 0.000
CODEMATERIAL PROPERTIES
E POISSON'S DENSITY THERMAL COEFFICIENT YIELD
1. 28.3E+06 .270 2.830E-01 9.820E-06 3.000E+04
CROSS-SECTION PROPERTIESMOMENTS OF INERTIA SHEAR RATIO TORSION WARPING DES.
CODE AREA 1 Y Y 2 CONSTANT CONSTANT FIX.
1 8.88E-02 2.15E-03 2.15E-03 1.77 1.77 4.30E-03

SFFBAOK 01/20/e1 13.23.05.
STATIC ANALYSIS OF GENERAL STRUCTURESU SHAPE 1/2 IN. TUBING T.400 F.. 1/11.2.0 UEV14
STRESS RECOVERY VALUESCOMBINED POINT 1/3 POINT 2/4
CODE STRESS CIY1 CI21 R(EFF) CIYI CU) RIEF:1_
1 1 .250 .250 .250
SPECIFIED RESTRAINTSJOINT DIRECTION VALUE
1 1234567 123456
LOADING NO. 1: 10 G. LOADING IN Y DIRN.
ACCELERATION LOADINGAIX) O. A(Y) - 1.000E+01
TOTAL APPLIED FORCES:FIX) O. F(Y) 1.50BE.01 FIZ1 O.
O.
69

70
SAGSSTATIC ANALYSIS OF GENERAL STRUCTURES
STRUCTURAL DYNAMICS RESEARCH CORPORATION
U SHAPE 1/2 IN. TUBING . T.400 F.. L/H.2.0 UEV14
*1* LOADING NO. 1 10 G. LOADING IN Y DIRN.
JOINTJOINT DISPLACEMENTSX Y 1 THETAM THETAtYI TMETAI/1
1 O. O. O. O. O. O.2 1.748E-,03 1.969E-05 O. O. O. -2.287E-043 -8.975E-06 3.375E-05 O. O. O. 9.344E-044 -1.891E-16 1.582E-02 O. O. O. -8.334E-185 8.975E-06 3.375E-05 O. O. O. -9.344E-046 -1.748E-03 1.969E-05 O. O. O. 2.287E-047 0. O. O. O. O. O.
JOINT REACTIONSJOINT FIX) Fri') FIl) MIX) MC() MU)
1 -1.504E+00 -7.542E+00 O. O. O. 7.494E007 1.504E+00 -7.542E+00 O. O. O. -7.494E+00
TOTAL 5.684E-14 -1.508E+01 O. O. O. -3.979E-13
SPAN
STRESS CALCULATIONS
END MZ/SM MY /SM P/A SHEAR COMBINEDYIELDRATIO
I FORE 8.722E+02 O. 8.490E+01 O. 9.571E+02 .032 AFT -1.754E+03 O. 4.245E+01 O. 1.796E+03 .063 FORE -1.754E+03 O. 1.693E+01 O. 1.771E+03, .064 AFT -1.754E+03 O. 1.693E+01 O. 1.771E+03 .065 FORE -1.754E+03 O. 4.245E+01 O. 1.796E+03 .066. AFT 0.722E+02 O. B.490E+01 O. 9.571E+02 .03
MAXIMUM STRESS * 1.796E+03 ON SPAN 2

71
VI.C. Analysis of "L" Shape with a
Concentrated Weight On
6.11 Concentrated Weights on Piping Configurations
Concentrated weights often occur on pipe/tubing runs. Common
instances are line mounted instruments or valves. These tend to
overstress the piping which otherwise would meet "cookbook" criteria.
6.12 Derivation of Expression for "L" Shape with a Concentrated
Weight or Force On
Figure 6.4 shows an "L" configuration with a valve weighing
P pounds at a distance "a" from the free end.
The moments and reactions in the configuration can be determined
by using "slope-deflection" method, as described in Section III and
used in Section VI.A and VI.B. Total stresses due to the concentrated
weights and self-weight of the piping which is uniformly distributed
can be calculated using the principle of superposition.
and
Consider leg AB:
MFAB MFBA = 0
2E1 2E10B' M = 0 (0+0B) =" AB
MBA = 0 -2Eh I 4E10
B(20B+0) = -
Consider leg BC:
Pab2
Pa2b
MFBCand 14,_
teCBL2
L2
(6.19)

13
Figure 6.4
C
He
72
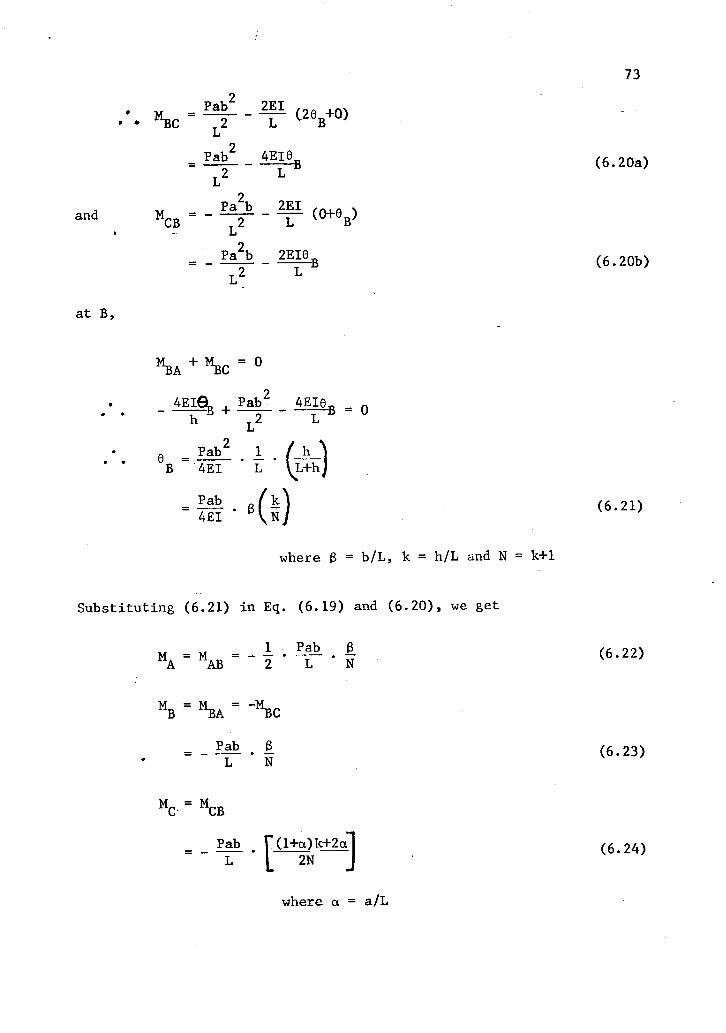
and
at B,
Pab2
2E1. -Bc 2
(20 +0)
Pab2
4EI0
L2
Pa2b 2E1
NCB_ (0+0B)
L2
Pa2b 2E10
B_
L2
NBA + NBC0
4E1a+
Pab.2
4E18B
hL2
= 0
Pab2
1 (h )eB '4E1 L L+h
Pab S()14
where a= b/L, k= h/L and N= k+1
Substituting (6.21) in Eq. (6.19) and (6.20), we get
1 Pab a
14A NAB 2 L N
NB MBA NBC
PabL N
M = MC. CB
=Pab [(1+a)k+2]L 2N
where a = a/L
73
(6.20a)
(6.20b)
(6.21)
(6.22)
(6.23)
(6.24)

74
Comparison of the above with the results for Frame 4 in Refer-
ence (8) shows that they are identical. A numerical check using
SAGS computer program and above equations yield same results proving
the accuracy of above equations.
Moment under the load is given by
Mp PabL + a% 4- dMc
Substituting the values of a, MB and Mc and substituting
P=nw where w is weight of the value and n the load factor, we get
MP.= nwla(1-a)(1 (1-a)21 at(l+a
2N
)k+2a/11
and bending stress
tr= L'c(i_a),(11 (1_002 1 al(l+a)k+2a/11 wD_ n L2N 21
where
= k; n w c'L (6.25)
1 at(l+a)k+20kkb = 12 all -a) (1-a)
2
2N
, Dc =
21for pipe or tubing
= 116.387 for 1/2-inch o.d. tubing
w = concentrated weight in pounds
n = load factor, 1.0 for deadweight analysis

75
The location of the maximum moment and stress varies depending
on L/h and a/L ratios. The value of kl; is as. follows;
4(1+a)k+2a1-.1= 12ta(1 a)
2N
1(1'3= 12r")2-.1
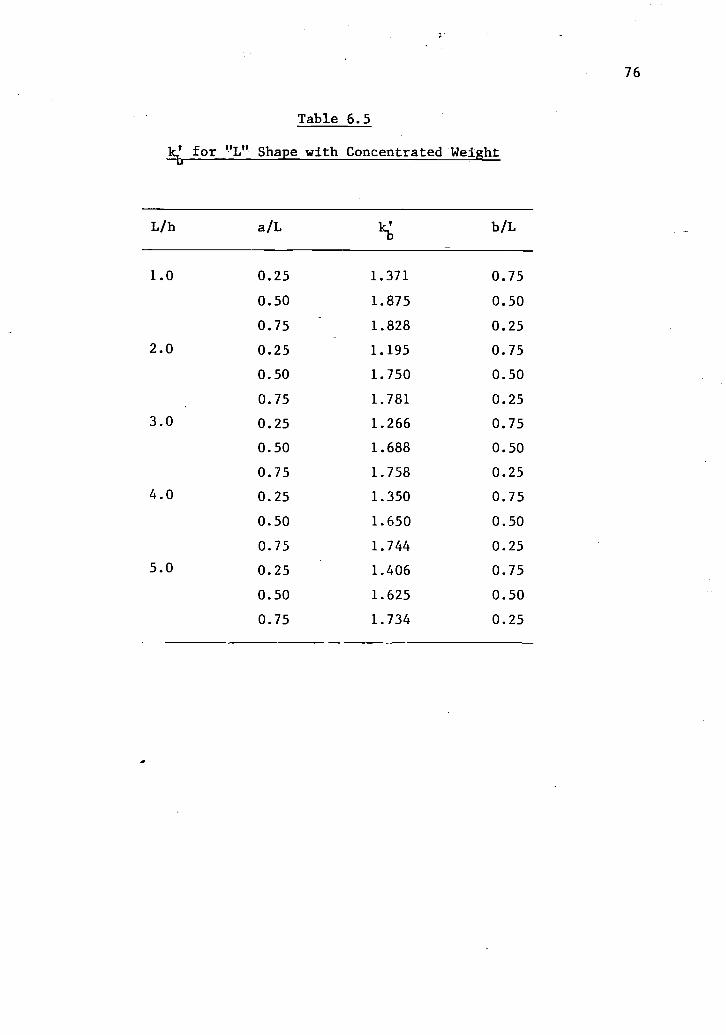
Table 6.5 shows factor
a/L for "L" shape.
6.13 Numerical Check
for a/L 2. 0.5
for L/h 2 2.0
for a/L < 0.5
for various combinations of L/h and
A "L" configuration similar to the one shown in Figure 6.4
with L+h = 60 inches and L/h = 1.0 through 5.0 and a/L = 0.25, 0.5 and
0.75 was checked for a concentrated weight of 10 pounds on "SAGS" (7)
computer program.
Comparison of hand calculations using Eq. (6.25) and computer
program results is shown in Table 6.6. A sample computer run for
L/h=1.0 and a/L=0.25 is shown on pages 78 through 80.
76
Table 6.5
for "L" Shape with Concentrated Weight
L/h a/L kb b/L
1.0 0.25 1.371 0.75
0.50 1.875 0.50
0.75 1.828 0.25
2.0 0.25 1.195 0.75
0.50 1.750 0.50
0.75 1.781 0.25
3.0 0.25 1.266 0.75
0.50 1.688 0.50
0.75 1.758 0.25
4.0 0.25 1.350 0.75
0.50 1.650 0.50
0.75 1.744 0.25
5.0 0.25 1.406 0.75
0.50 1.625 0.50
0.75 1.734 0.25
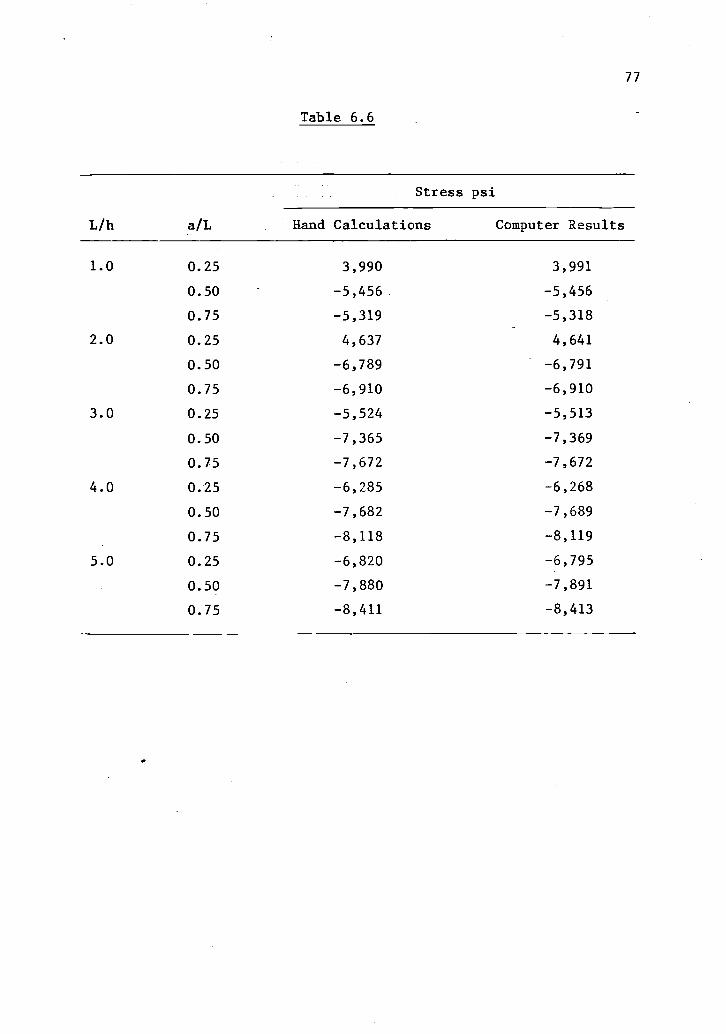
77
Table 6.6
L/h a/L
Stress psi
Hand Calculations Computer Results
1.0 0.25 3,990 3,991
0.50 -5,456 -5,456
0.75 -5,319 -5,318
2.0 0.25 4,637 4,641
0.50 -6,789 -6,791
0.75 -6,910 -6,910
3.0 0.25 -5,524 -5,513
0.50 -7,365 -7,369
0.75 -7,672 -7,672
4.0 0.25 -6,285 -6,268
0.50 -7,682 -7,689
0.75 -8,118 -8,119
5.0 0.25 -6,820 -6,795
0.50 -7,880 -7,891
0.75 -8,411 -8,413

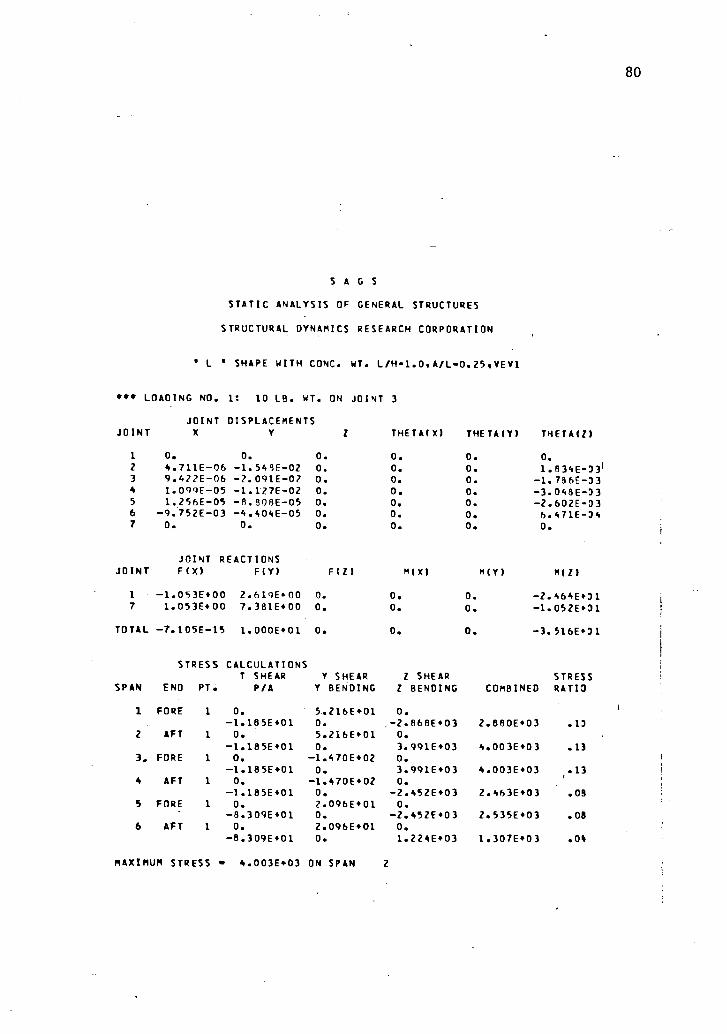
SAGSSTATIC ANALYSIS OF GENERAL STRUCTURES
STRUCTURAL DYNAMICS RESEARCH CORPORATION
L SHAPE WITH CONC. WT. L/H.1.0.11/10.25YEY1
* SPACE FRAME ANALYSIS
FORE END AFT END MATERIAL SECTION ROTATIONSPAN LENGTH JOINT JOINT CODE CODE ANGLE TEMP.
1 11.25 1 2 1 1
2 11.25 2 3 1 1
3 3.75 3 4 1 1
4 3.75 4 5 1 1
5 15.00 5 6 1 1
6 15.00 6 7 1 1
STRUCTURE WEIGHT/MASS 1.508E+00
JOINT COORDINATESJOINT X
1 0.000 30.000 0.0002 -11.250 30.000 0.0003 -22.500 30.000 0.0004 -26.250 30.000 0.0005 -30.000 30.000 0.0006 -30.000 15.000 0.0007 -30.000 0.000 0.000
MATERIAL PROPERTIESCODE E POISSON'S DENSITY THERMAL COEFFICIENT YIELD
1 28.3E+06 .270 2.830E-01 9.820E-06 3.000E+04
CROSS- SECTION PROPERTIESMOMENTS OF INERTIA SHEAR RATIO TORSION WARPING 05G.
CODE AREA I Y Y I CONSTANT CONSTANT FIX.
1 8.88E-02 2.15E-03 2.15E-03 1.77 1.77 4.30E-03
1
78

79
MONDAY JAN 19, 1981 19.07.55.
STATIC ANALYSIS OF GENERAL STRUCTURESL SHAPE WITH CONC. WT. L/H1.0.A/L.0.25.VEV1
STRESS RECOVERY VALUESCOMBINED POINT 1/3 POINT 2/
CODE STRESS CIY) C(II RIEFF) C(Y) C(21 R(EFF) 1
1 1 .250 .250 .250
SPECIFIED RESTRAINTSJOINT DIRECTION VALUE
1 1234567 123456
LOADING NO. 12 10 LB. WT. ON JOINT 3
APPLIED FORCES FINALJOINT DIR TYPE VALUE
3 Y FORCE -1.000E+01
JOINT INC.
TOTAL APPLIED FORCESFIX) 0. F(Y) -1.000E+01 F221 O.
80
SAGSSTATIC ANALYSIS OF GENERAL STRUCTURES
STRUCTURAL DYNAMICS RESEARCH CORPORATION
' L SHAPE WITH CONC. WT. L/H-1.0.A/L-0.25.YEY1
LOADING NO. 1: 10 LB. WT. ON JOINT 3
JOINT DISPLACEMENTSJOINT X Y Z THETA(X) THETA(Y) THETA(2)
1 O. O. O. O. O. O.Z 4.711E-06 -1.548E-02 O. O. O. 1.834E-3313 9.427E-06 -2.091E-02 O. O. O. -1.796E-334 1.099E-05 -1.127E-02 O. O. O. -3.048E-D35 1.256E-05 -8.808E-05 O. O. O. -2.602E-036 -9.752E-03 -4.404E-05 O. O. O. 6.471E -)47 O. O. O. O. O. O.
JOINT REACTIONSJOINT F(X) FLY) F(2) M(X) M(Y) m(2)
1 -1.053E+00 2.619E+00 O. O. O. -2.464E+317 1.053E+00 7.381E+00 O. O. O. -1.052E+31
TOTAL -7.105E-15 1.000E+01 O. O. O. -3.516E+31
SPAN
STRESS
END PT.
CALCULATIONST SHEAR
P/AY SHEARY BENDING
Z SHEARZ BENDING COMBINED
STRESSRATIO
1 FORE 1 O. 5.216E+01 O.-1.185E+01 O. -2.868E+03 2.880E+03 .13
2 AFT 1 O. 5.216E+01 O.-1.185E+01 O. 3.991E+03 4.003E+03 .13
3, FORE 1 O. -1.470E+02 O.-1.185E+01 O. 3.991E+03 4.003E+03 .13
4 AFT 1 O. -1.470E+02 O.-1.185E+01 O. -2.452E+03 2.463E+03 .08
5 FORE 1 O. 2.096E901 O.-8.309E+01 O. -2.452E+03 2.535E+03 .08
6 AFT 1 O. 2.096E+01 O.-8.309E+01 O. 1.224E+03 1.307E903 .08
MAXIMUM STRESS 4.003E+03 ON SPAN 2

VII. CONCLUSIONS
7.1 Section II of this report stated the reasons for undertaking
the present investigation. It also lists five specific questions
which we were trying to answer. Based on the discussion in Sec-
tions IV, V and VI, we now can answer the questions as follows:
81
1. The data given in Grinnell handbook can be used
for both tubing and piping sizes. The equations
developed in Section IV prove that the factors k , kx Y
and kb used in the Grinnell handbook are independent
of member geometry. Equations used in the Grinnell
handbook to determine reactions Fx, F
yand stresses
Sb
can be used for any size of pipe or tubing as
long as appropriate values of outside diameter D
and moment of inertia I are used.p
2. Section IV gives the general expressions from which
values of k , k and kb can be determined for anyx y
value of L/h ratio for the three configurations,
i.e., "L", "U" and "Z". They are derived in Sec-
tion IV and summarized here as follows:
a) for "L" shape:
kX m
3(m+1)
3(3m3+4m+1)
k =
23Lmr
(m+4)+3]m(m+1)
18(m2+m+2)
and kbm(m+1)
with m = h/L.

b) for "U" shape;
k3M
3(jr1-2)
x (2m+1)
18m2(m+1)
and kb(2m+1)
where m = L/h.
c) for "Z" shape with a/b = 1.0
24m(2m2+3)
kx
=(3m+4)
k =24(3m
3+6m+2)
y m(3m+4)
72(m3+3m+2)
and kb =m(3m+4)
72(2m2+3)
(3m+4)
where m = L/h.
form_ 1.0
for m > 1.0
82
3. Use of above relationships yield numerical values
of k , k and kb which are similar to the onesx y
listed in the Grinnell handbook. This is established
in Tables 4.1, 4.2 and 4.3. Thus, data shown in
Grinnell handbook is accurate for all practical
purposes.
4. A numerical check by using a finite element analysis
program "SAGS" (7), as explained in Section V,
confirms the accuracy of the data given in the
Grinnell handbook. This also proves the correctness
83
of the formulae derived in Section IV and VI of this
report.
5. Section VI contains an approach similar to the one used
in Grinnell handbook that can be used for calculating
stresses due deadweight, seismic loads and concentrated
loads for "L" and "U" configurations. A reference
such as-"Rigid Frame Formulas" (8) contains formulae for
literally hundreds of configuration with a variety
of end conditions and load combinations. It is
suggested that depending on specific needs constants
similar to the ones in Grinnell handbook be developed.
7.2 Grinnell handbook contains constants kx, k
yand kb for reactions
Fx, F and bending stress Sb. It does not refer to any end
Ymoments. Due to this fact, an effort was made to derive k
x,
k and kb with the assumption that the ends were pinned. This
assumption proved to be incorrect because the values for kb for
"L" configuration were exactly half of the ones listed in
Grinnell handbook. A next trial with ends assumed fixed, yielded
results identical to those in the Grinnell handbook. Actual end
conditions normally lie between pinned and fixed. This means that
the stresses calculated by using Grinnell handbook are higher than
actual; but at the same time, moments on the support are com-
pletely ignored. The former is conservative but the latter is
unconservative for actual piping systems, especially for large
bore pipes when such moments will be considerably higher than
small diameter tubing.
7.3 Scope of Future Work
Grinnell handbook has been a useful reference. However, its
utility is almost nil if the piping system has intermediate restraints
84
which all actual systems have. Appendix B details an attempt to devise
a relation for an "L" configuration with one intermediate restraint.
The solution involves four simultaneous equations and quickly gets
out of hand. A programmable calculator, HP-67, was programmed to
numerically solve these equations. A new generation of programmable
calculators, such as HP-41C will be able to solve up to eight
simultaneous equations thus enabling to solve a configuration with
up to three intermediate restraints. This will solve the need at
a preliminary design level. Larger computers and finite element
programs can be used for final analysis of complete pipe runs with up
to 200 restraints and load combinations. A computer program, such as
"HANGIT" (10), have been developed recently to work backward on a
piping system (i.e., determine the location and types of supports
from allowable loads and stresses) which greatly simplify routing
and supporting a piping system. However, computer facilities are
not always available for preliminary design level.
The author intends to pursue analysis of smaller systems, develop-
ment of data and programs for handheld calculators as a future
assignment.

SECTION VIII
REFERENCES
1. ASME Boiler and Pressure Vessel Code Section III Division 1,1974 edition, by the American Society of Mechanical Engineers,New York.
2. Design of Piping Systems, The M. W. Kellogg Company, second
edition, 1956. John Wiley & Sons, Inc., New York.
3. Piping Design and Engineering, ITT Grinnell Industrial Piping,Inc., fifth edition, 1976.
4. Frank A. D'isa, Mechanics of Metals, Addison-Wesley PublishingCompany, 1968.
5. Clifford D. Williams, Analysis ofStructures, fourth edition, 1960,
6. Beautait, Rowan, Hoadley, Hackett,Analysis, Prentice-Hall Inc., 1965
84a.
Statically IndeterminateInternational Textbook Company.
Computer Methods of Structural
7. Static Analysis of General Structures, SAGS, by StructuralDynamics Research Corporation, manual 1176073600C published byControl Data Corporation, P. O. Box 0, HQCO2C, Minneapolis,
Minnesota 55440.
8. A Kleinlogel, Rigid Frame Formulas, Frederick Ungar PublishingCompany, New York, 1930.
9. Raymond J. Roark, Warren C. Young, Formulas for Stress andStrain, fifth edition, 1975, McGraw-Hill Book Company.
10. Analysis and Design Optimization for Piping Systems, HANGIT,by Ernst, Armand and Botti Associates, Inc., 60 Hickory Drive,
Waltham, Massachusetts 02154.

APPEND ICES

85
APPENDIX A
GRINNELL METHOD OF SIMPLIFIED PIPING ANALYSIS
"Piping Design and Engineering" was first published in 1963
by Grinnell Corporation. It was the first attempt to compile
comprehensive data for piping design and_includes a variety of topics
such as expansion and stresses, velocity and pressure drop, heat
transfer, pipe fabrication, nuclear piping, pipe hangers and supports,
and other piping data. It is widely used and is extremely valuable
at preliminary design levels.
The handbook is used mainly to calculate stresses in piping due
to thermal expansion and reactions at the supports. This section
describes the method of calculation for three most common piping
configurations, "L", "U" and "Z". Appropriate cuts from the text
are at the end of this section.
Sample Problem
Determine the stresses in the tubing and end reactions for the
configuration shown in Figure A-1.
Fy
Fx
L -0
Figure A-1
k -._ 2 - 0
Design Temperature: 550°F
Size: 1/2-inch o.d. x .
0.065-inch wall
Material: austeniticstainless steel

86
Solution; for 1/2 inch o.d. x 0.065-inch wall tubing
Outside diameter D = 0.5 inch.
Inside diameter d = 0.50-2 (0.065)
= 0.37 inch
7r
-I)
4Moment of inertia = (
64 -d4\
= ['(0.50) 4 -(0.37)4]64
= 2.148 E-3 in.4
Expansion factor c = 893 from page 88 for austenitic stainless
steel at 550°F
Refer to page 89 and Figure A-1 on page 85
4.0L/h
2.0= 2.0
from table for 90° turn shown on page 89
kx
= 54.0, k = 16.6 and kb = 102y
I
Fx= k
x 2c lb2
= (54.0)(893)(2.148 E-3)
(4.0)2
= 6.5 lb
87
I
y =ky c lb
L2
= (16.6)(893)(2.148 E-,3)
= 2.0 lb
(4.0)2
DSb = kb -E psi
= (102)(893)(0.5)
= 11,386 psi
Similar procedure is used for other configurations. It is
important to note that Grinnell Handbook does not show moments at the
restrained ends. Section IV of this report has proved that the
constants k , k and kb are correct only if the ends are assumed tox y
be fixed. Thus, the Grinnell handbook is inaccurate to the extent
that it ignored end moments. Refer to Section VII for details.

88
EXPANSION AND STRESSES
EXPANSION FACTOR, c
Temp.T.F
CarbonSteel
C s .30%
CarbonSteelC > .30%
C-Moly& Low
Cr.-MolyCr < 3%
Cr.-MolvN517.0 << 9C7.r.
AusteniticStainless
Steels
Cr. StainlessStreit,
12 Cr. 17Cr.& 2 Cr.
25 Cr.- -20 Ni
WroughtIron
70 0 0 0 0 0 0 0 0100 37 40 40 35 54 34 47 44
150 98 106 106 92 143 90 125 120
200 160 171 171 149 232 145 204 105
250 228 244 244 212 323 204 287 273300 294 315 315 271 414 264 368 352
3.50 365 391 391 335 509 326 455 434
400 436 467 467 396 603 389 541 814
430 510 547 547 465 699 455 529 598
500 584 625 626 531 7P4 520 718 681
550 664 711 711 603 893 500 809 768
600 743 796 796 672 589 559 901 855
650 827 886 81913 714 1089 730 995 945
7110 909 974 974 815 1189 799 1088 1035
750 996 1068 1068 891 1292 874 1186 1125
775 1038 1113 1113 929 1344 P09 1235 1171
800 1159 967 1395 946 1284 1216
825 1208 1005 1448 983 1335
830 1256 1043 1000 1022 1381
875 1303 1081 1552 1061 1435
900 1351 1121 1605 1097 1484
92.5 1398 1161 1659 1134 1533
950 1445 1200 1713 1174 1585
975 1492 1240 1766 1212 1634
1000 1538 1278 1820 12.50 1681
1030 1639 1357 1928 1328 1781
1100 1737 1435 2036 1404 1870
1150 1511 2144 1480 1980
Expansion Factor cExpansion in inches per 100 f . X Ec
1728 X 100
For Straight and Curved Pipe
Da = Nominal Pipe Size
D = Outside Diameter
Wall Thickness
d = Inside Diameter
D 2l
PROPERTIES OF PIPE
IreAlInside Area
Metal Area Aa, = wi(D
Moment of Inertia I y = 0.019I(D4 d4)
- 0.0625z1,(D2 d2)
1Section Modulus -
2
11

89
ITT GRINNELL l'IPING DEsIGN AND ENGINEERING
90* TURN
h
FT
1pReacting Force
2
Ib
/pReacting Force F k . c Li lb
1)Maximum Bonding Stress sB 14. C. )7 psi
L in feet D in inches/p in inches'
r.
A k. k, 84
1.0 12.0 12.0 361.2 17.2 12.5 461.4 23.0 13.4 581.6 32.0 14.4 71
1.8 42.0 15.4 85
2.0 54.0 16.6 1022.2 08.3 17.8 1202.4 84.4 10.2 1402.6 103 20.0 101
2.8 126 22.0 184
3.0 150 23.5 2093.2 175 25.0 234
3.4 207 26.5 2393.6 237 20.0 2873.8 274 26.5 318
4.0 315 31.5 3494.2 336 33.0 301
4.4 406 34.6 414
4.6 456 30.2 430
4.8 510 37.8 487
5.0 570 39.5 5205.2 630 41.2 5095.4 700 43.0 010
5.6 775 44.7 652
5.8 855 40.2 096
6.0 938 48.2 7436.2 1020 49.8 790
6.4 1110 51.6 8106.6 1212 53.4 8926.8 1313 65.0 044
7.0 1426 56.8 0977.2 1.517 50.0 1050
7.4 1055 60.2 1104
7.0 1785 61.8 1159
7.8 1017 G1.6 1219
8.0 2069 65.4 1284
20
HOOKED Z SHAPE
_
Pestling Force F. = k, e lb
Ifending Force k, c. 4
L2
MaNitnum Bending Stress aB kb e
/p in inches' L in
k,
feet I) in invites
k4
1
A
0.60.8
1.01.21.41.01.8
2.02.22 42 6
1.182.7
4.37.8
)1.215.219.7
24.330.037.045.0
1.312.2
3.34.70.27.70.2
10.913.015.1
17.2
5.09.4
13.117.322.020.731.4
30.441.5460bl 7
. 2.8 54.0 16.3 58.0
3.0 64.8 21.6 64 g3.2 76.0 24.0 72 03.4 68 0 20.5 79 5
3.6 )00 0 20.0 87.0
3.8 113.6 31.0 05.0
4.0 128.7 34.5 103
4.2 144 37.4 112
4.4 160 40.4 121
4.6 178 43.4 130
4.8 198 40.4 )39
50 219 49.4 148
6.2 241 52.6 157
64 263 65.6 167
56 206 68.7 170
5.8 310 61.8 185
0.0 334 05.0 195
0.2 3(3) 68.4 205
6.4 308 71.8 215
0.6 416 76-2 2260 446 78.0 230
70 479 82.0 240
7.2 508 85 5 257
7.4 540 80 1 208
7.6 679 92 7 278
7.8 615 96 3 289
8.0 653 100.0 300
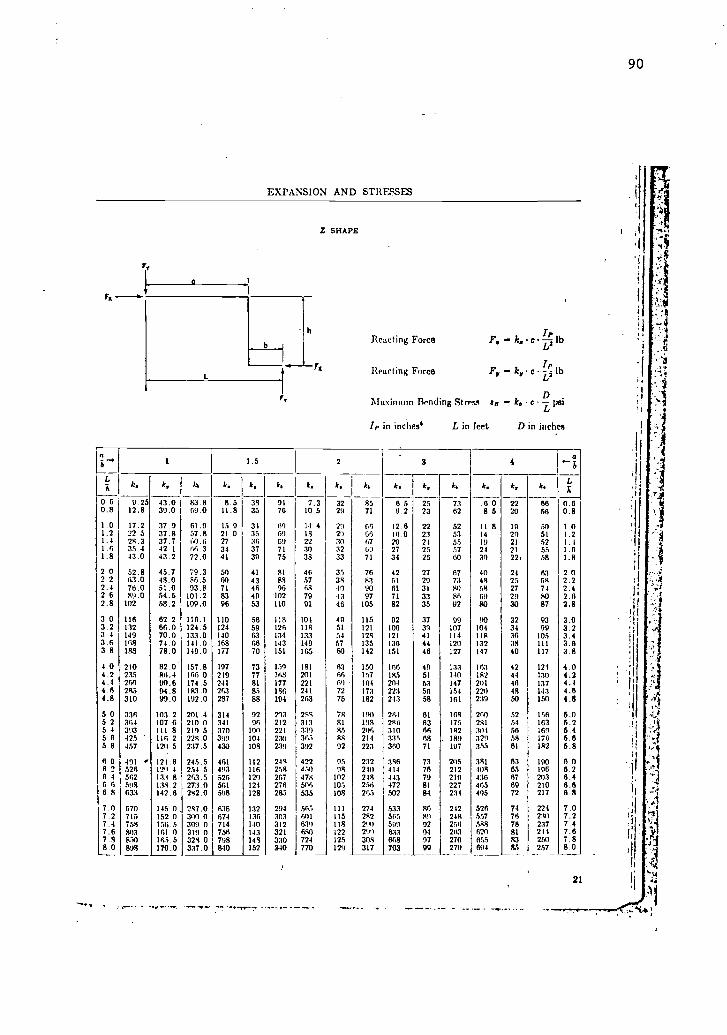
EXPANSION AND STRESSES
Z SHAPE
ry
rA
Reacting Force
Reacting Force
:Maximum Bending Stress
1p in inches4 L in feet
k, cL-
lb2
F9 k, c -L-2 lb
BB psi
D in inches
-4"
L.
h
ri,
1 1.5 2.
3 4a
.- b
L LI k k, 84 k. k, 44 8. k, k, k. k, 4 8. k, 8, K
0.6 9.25 43.0 83.8 8.5 38 91 7.3 32 85 6.5 25 73 .6.0 22 88 0.80.8 12.8 39.0 69.0 11.8 35 76 10.5 29 71 9.2 23 62 8.5 20 58 0.8
1.0 17.2 37.9 61.9 15.9 31 60 14.4 29 66 12.6 22 52 11.8 19 50 1.01.2 22 3 37.8 57.8 21.0 35 69 18 29 66 16.0 23 53 14 20 51 1.21.4 24.3 37.7 60.6 27 36 69 22 30 67 20 24 55 19 21 52 1.41.6 35.4 42 L 66.3 34 37 71 30 32 69 27 25 57 24 21 55 1.81.8 43.0 43.2 72.0 41 39 75 38 33 71 34 28 60 30 22, 58 1.8
2 0 52.8 45.7 79.3 50 41 81 46 35 76 42 27 67 40 24 63 2.02 2 63.0 48.0 86.5 60 43 88 57 38 143 51 29 73 48 25 64 2.22.4 76.0 51.0 93.8 71 46 96 68 40 90 61 31 KO 58 27 74 2.42.6 89.0 54.5 101.2 83 49 102 79 43 97 71 33 86 69 29 80 2.62.8 102 58.2 109.0 96 53 110 91 46 105 82 35 92 80 30 87 2.8
3.0 118 82.2 116.1 110 58 118 104 49 115 02 37 99 00 32 03 3.03.2 132 66.0 124.5 124 59 126 118 51 121 106 39 107 104 34 99 3.23 4 149 70.0 133.0 140 63 134 133 54 128 121 41 114 11R 36 105 3.43.6 168 74.0 141.0 168 66 143 149 57 135 138 44 120 132 38 III 3.83.8 188 78.0 149.0 177 70 151 165 60 142 151 46 127 147 40 117 3.8
4.0 210 82.0 157.8 197 73 159 181 6.3 150 166 49 133 163 42 121 4.04.2 235 86.4 166.0 219 77 168 201 66 157 185 51 140 182 44 130 4.24.4 260 90.6 174.5 241 81 177 221 69 164 204 83 147 201 46 137 4.44.0 288 94.8 IR3.0 263 85 186 241 72 173 223 50 154 221) 48 143 4.04.8 310 99.0 192.0 287 88 194 263 75 182 2)3 58 161 239 50 150 4.8
5 0 336 103.2 201.4 314 92 2n3 288 78 190 264 01 168 260 52 15n 5.05 2 364 107.6 210.0 341 96 212 313 81 19R 2146 63 175 281 54 163 5.25 4 393 III .8 219 5 370 100 221 339 R5 206 310 66 182 301 56 169 6.45 0 425 116.2 228.0 399 104 230 361 1114 214 335 68 189 329 58 176 6.85 8 457 120 5 237.5 430 108 239 392 92 223 360 71 197 355 61 182 5.8
0 0 491 121.8 245.5 461 112 244 422 95 232 386 73 205 3141 63 190 6.06 2 526 129 4 254 5 493 116 258 450 98 210 414 76 212 408 6.5 196 6.26 4 562 13:1 8 263.5 526 120 267 474 102 248 443 79 211) 436 67 203 8.4G 6 598 138.2 273 0 561 121 276 506 105 256 472 81 227 465 60 210 6.66 8 633 142.8 242.0 598 128 281 535 108 265 502 84 231 495 72 217 0.8
7.0 670 145.0 287.0 636 132 294 561 III 274 533 86 212 526 74 224 7.07.2 718 152 0 300 0 674 136 303 601 115 282 565 89 248 557 76 230 7.27.4 758 156.5 309.0 714 140 312 639 118 210 599 92 256 588 78 237 7.47.6 803 161.0 319.0 756 143 321 600 122 219 633 94 263 629 81 211 7.07.8 8700 165.5 329.0 798 148 330 724 125 308 668 97
I
270 655 R3 250 7.8
8.0 898 170.0 337.0 840 152 340 770 129 317 703 99 279 694 83 257 8.0
21
90

rrr (VRINNELL PIPING I)EsIGN AND ENGINEEHING
II SHAPE- -EQUAL LEGS
LK
k, k,
0.2 0.0377 0.6170.3 0.1165 -1.3090.4 0.256 2.2320.5 0.469 3.3700.6 0.765 4.5800.7 1.191 0.4300.8 1.68 8.1100.9 2.38 10.39
1.0 3.00 12 001.2 4.88 16.741.4 7.37 22.261.6 10.55 28.561.8 14.48 35.52
2.0 19.2 43.202.2 24.6 52 322.4 31.4 60.722.6 39.2 70.562.8 48.0 81.24
3.0 57.8 02.643.2 69.1 104.53.4 82.2 118.23.6 95.6 130.83.8 111.0 138.4
4.0 128.1 160.04.2 147.0 176.1
4.4 166.6 192.04.6 180.0 208.84.8 213.0 227.4
5.0 239.0 240.05.2 266.0 254.0
I.
Fx
Reacting Force k,e- --/p I
L2
Maximum Bending tress 1 DB . kb C --L psi
I,, in inches' L in feet Din inches
II SHAPE- MODIFIED
Reacting Force
Reacting Force
F. leg e1p--
k, c Ip-Maximum Rending &rem 83 ". kb C
r in inches' L in feet D in inches
h
Fx
..1,-4
a4/3 1.6 2 8 Dirlso-
lion
Zi
afro
I 6. 6, 64 k, k, 144 k. kw ka 6. 4, h Force
1 2.62 0.51 10.45 2.63 0.75 10.50 2.82 1.41 11.2 3.30 2.28 12.8
1.2 3.32 0.69 14.1 3.38 1.01 14.45 3.69 1.85 16.5 4,37 2.79 17.8 I
13.5 4.12 0.86 13.3 4.5 0.42 14.5
__-_-
1.6 4.17 1.26 13.8 4.12 1.15
2 5.46 2.66 17.3 5.50 2.60 17.2 5 30 2.44 16.1 5.6 2.14 17.3
9 7.20 4.70 22.2 7.10 4.70 21.5 7.08 4.65 21.3 7.8 4.50 22.01
6 9.30 7.80 28.7 9.33 7.76 28.2 9.40 7.87 28.2 9.4 7.68 28.2
28
/- eq77.4
91
92
APPENDIX B
"L" SHAPE WITH A GUIDE
Most "cookbook" methods of piping analysis, such as Grinnell
handbook, are based upon the assumption that there are no intermediate
restraints between two anchors. In practice, this is rarely the case.
If Grinnell handbook is used, the intermediate restraint is treated
as an anchor. Thus, the pipe run can be very conservative or
unconservative.
Castigliano's second theorem can be successfully used to solve
such problems.
Figure B -1 shows a typical "L" shape with a "guide" as shown at "C".
The guide prevents movement of the pipe in y and z (perpendicular to
the plane of paper) directions but does not prevent movement in x
direction nor any rotations.
Let the pipe be subjected to temperature differential AT. Release
end A so that B moves to B' and A moves to A'. Replace restraint at
C by a reaction F and apply reactions FxA
, FYA
and moment MA
at A' to
37c
bring A' back to A. Refer to Figure B-2.
Thus, the moment on leg AB is
MAB Fxy
MAA
The moment on leg BC is
MBC Fx 11 F 3 -I- MAA YA
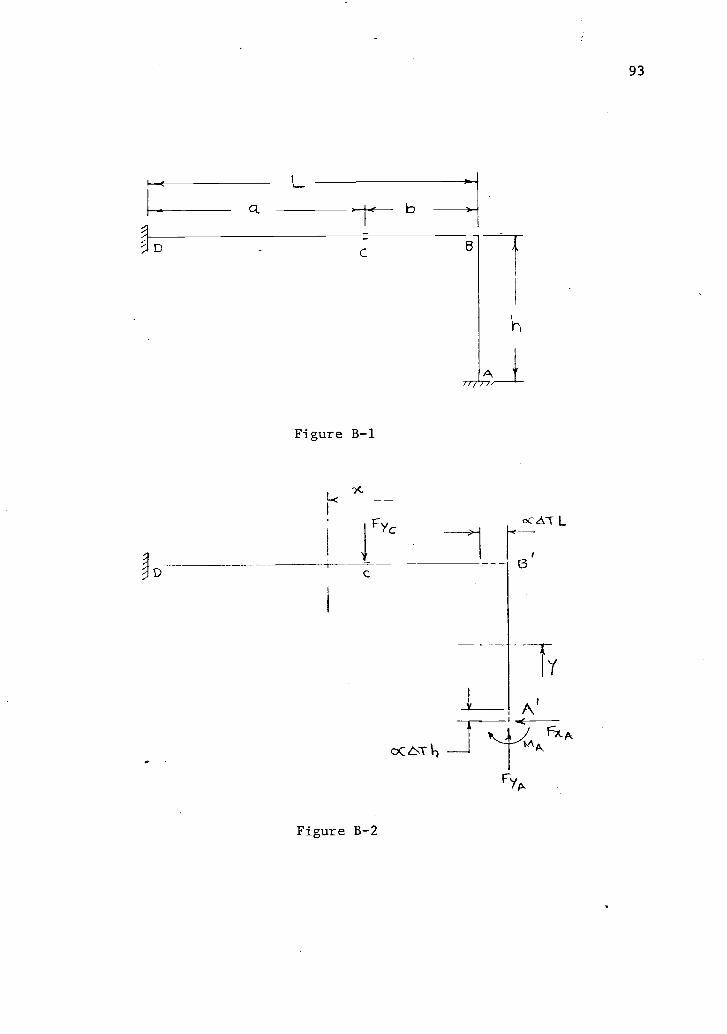
ct
Lb
D
D
C
Figure B-1
IFYc
Figure B-2
oC &T
A
oc dT L
93
Moment on leg CD
MCD
=FxAh-F
YAb+F
YCx+ M
A
Therefore, the total strain energy is
h 2 2 2
U =S dy +
(MAB) NC)dx
(mcD)dx
2E1 2E1 2E1
0 0 0
h (F y+M )2 b tFx h-F_ x+MA)xA A
2E1dy +
jr k A JA2E1
dx +
0 0
a (F.h-F b+F x+M )2
+xA yA
yCA
dx2E1
2
0
According to Castigliano's second theorem, partial derivatives
of the strain energy with respect to F , F , F and M shouldxA yA yc A
give displacements in the direction of the forces (reactions) and
rotation along the moments. These happen to be LaAT, haLT, 0 and 0,
respectively.
The four general equations thus are:
h3 + bh2 + ah2,)F - b2h + abh)F + 2h F-ixA
21 a
/A YC
1+(2- h
2+ bh + ah)MA = EIaAT (a + b)
- lb2h + abh)Fx
+ (1 b3 + ab2,)F (1-a2b Fz
(7-- A3
YA2 YC
b2+ aby1
A= EIaATh
94
(B-1)
(B-2)
( 1 2a h)Fx - (y a 2 ) 1b F + -3- a3) Fy1 + a2)14A = 0
A YA
(1 2h + bh + ah)F b2 + ab F + 1 a2)FxA 2 YA- YC
95
(B -3)
+ (a + b + h)MA = 0 (B-4)
_ A longhand solution for above simultaneous equations is difficult
if not impossible. Instead, these can be solved for specific values
of a, b and h to get the values of-F , F , F and MA.
xA YA YC
For example, L = 8'-0 = (a+b), h = 2'-0 and a = 6'-0, b = 2'-0
equations become
34.67 F 28.00 F + 36.00 F + 18.00 MA
= 8.00 EIaAT
xA YA YC
-28.00 F + 26.67 FYA
36.00 F 14.00 MA= 2.00 EIaAT
xAYC
+36.00 F 36.00 F + 72.00 F + 18.00 MA= 0
xA YA YC
+18.00 F - 14.00 F + 18.00 F + 10.00 MA= 0
A YA YC
For stainless steel tubing, 1/2-inch o.d. x 0.065 wall at
575°F
EIaAT = 28.3 x 106 lbs
2
144 in.20.002148 in.
4
in. ft.2
ft.4
9.82 E-6(505)°F = 2.09 lbs-
20,736 in.4
°F
This is of the type
AAci IB) with

96
34.67 -28.00 +36.00
-28.00 +26.67 -36.00
+36.00 -36.00 +72.00
+18.00 -14.00 +18.00
and
+18.00
-14.00
+18.00
+10.00
16.72
4.18
The solution of four simultaneous equations
[Ajfx} = {B}
=IA]
tB}
can be found by Gaussion Elimination as follows: First, by
eliminating F , the equations are transformed to three following
equationsYC
44.01 F 36.00 FYA
+ 24.00 MA
= 54.34xA
-112.20 FxA
+ 240.48 F 56.10 MA
= 11.16YA
48.00 FxA
36.00 F + 30.00 MA
= 4.18YA
Above equations are solved using 3x3 matrix program available
on Hewlett-Packard HP-67 calculator. The answers are
F = 11.07 lbsxA

97
F = 1.54 lbs.
YA
MA
= -15.72 ft.-lbs or = - 188.64 in.-lbs
Comparison of above values with the ones for joint 7 on page 100
of the computer output shows they are very close. Numerous such
output and checks are available for review.
Conclusion
Above example of "L" shape with one restraint proves that similar
problems can be solved by using Castigliano's second theorem. This
ability is limited only by the capability of solving simultaneous
equations. An upcoming version of programmable calculator "HP-41C"
has more storage capacity ("bytes") and should be able to solve
6x6 matrix or six simultaneous equations. It is the intent of the
author to prepare such a program when the calculator becomes available.
Widespread use of such calculators will enable accurate calculations
of simple piping configurations with intermediate restraints without
resorting to use of large digital computers.

98
SAGSSTATIC ANALYSIS OF GENERAL STRUCTURES
STRUCTURAL DYNAMICS RESEARCH CORPORATION
L ' SHAPE WITH A GUIDE H1 /H -3.0 T.575 F. LEVI
ts0 SPACE FRAME ANALYSIS *
FORE END AFT END MATERIAL SECTION ROTATIONSPAN LENGTH JOINT JOINT CODE CODE ANGLE TEMP.1 12.00 1 2 1 12 12.00 2 3 1 13 36.00 3 4 1 14 36.00 4 5 1 15 17.00 5 6 1 16 12.00 6 7 1 1
STRUCTURE WEIGHT/MASS 4 3.017E00
JOINT COORDINATESJOINT
1 0.000 24.000 0.0002 12.000 24.000 0.0003 24.000 24.000 0.0004 60.000 24.000 0.0005 96.000 24.000 0.0006 96.000 12.000 0.0007 96.000 0.000 0.000
MATERIAL PROPERTIESCODE E POISSON'S DENSITY THERMAL COEFFICIENT YIELD
1 28.3E406 .270 2.830E-01 9.820E-06 3.000E404
CROSSSECTION PROPERTIESMOMENTS OF INERTIA SHEAR RATIO TORSION WARPING MS.CODE AREA 2 Y Y 2 CONSTANT CONSTANT FIX.
1 8.88E-02 2.15E-03 2.15E-03 1.77 1.77 4.30E-03
SFONASU 01/20/R1 14.29.01.
STATIC ANALYSIS OF GENERAL STRUCTURESL ' SHAPE WITH A GUIDE H1 /H -3.0 T=575 F. LEVI
STRESS RECOVERY VALUESCOMBINED POINT 1/3 POINT 2/4
CODE STRESS C(Y) Cu) I R(EFF) C(Y) C(I) R(EFg)
1 1 .250 .250 .250
SPECIFIED RESTRAINTSJOINT DIRECTION VALUE
1 1234563 237 123456
LOADING NO. RISE TO 575 F.
TEMPERATURE LOADING
REFERENCE TEMPERATURE - 70.
SPAN TEMPERATURE FINAL SPAN INCREMENT
1 575. 6 1
TOTAL APPLIED FORCES:F(X) O. F(Y) O.
99

100
SAGSSTATIC ANALYSIS OF GENERAL STRUCTURES
STRUCTURAL DYNAMICS RESEARCH CORPORATION
L SHAPE WITH A GUIDE HI/H3.0 1 -575 F. LEVI
LOADING NO. 1 RISE TO 575
JOINT DISPLACEMENTSJOINT X Y
F.
1 THETAIXI THETAIYI THETA(1)
1 O. O. 0. O. O. O.
2 5.946E-02 -1.015E-02 O. O. O. -8.400E-043 1.189E-01 O. O. O. O. 3.333E-034 2.973E-01 2.886E-01 O. O. O. 7.149E-035 4.756E-,01 1.190E-01 O. O. O. -2.208E-026 1.716E-01 5.950E-02 0. O. O. -2.418E-027 O. O. O. O. O. O.
JOINT REACTIONSJOINT F(X) F(.() FIII M(X) M(Y) MIZI
I 1.109E+01 2.137E+00 O. O. O. 1.708E+013 O. -3.685E+00 O. O. O. O.
7 -1.109E+01 1.547E+00 O. O. O. 1.890E+02
TOTAL -1.196E-10 -1.847E-13 O.
STRESS CALCULATIONS
0. 0. .2.061E+32
YIELD
SPAN END mI/SN MY/SM P/A SHEAR COMBINED RATIO
I FORE 1.988E+03 O. -1.249E+02 O. 2.113E+03 .07
2 AFT -3.982E+03 O. -1.249E+02 O. 4.107E+03 .14
3 FORE -3.982E+03 O. -1.249E+02 O. 4.107E+03 .14
4 AFT 8.986E+03 O. -1.249E+02 O. 9.111E+03 .30
5 FORE 8.986E+03 O. -1.742E+01 O. 9.003E+03 .30
6. AFT -2.200E+04 O. -1.742E+01 O. 2.202E+04 .7
MAXIMUM STRESS 2.202E+04 ON SPAN 6