
The Polyhedral Off-line Robust Model Predictive Control Strategy for Uncertain Polytopic...
6
The Polyhedral Off-line Robust Model Predictive Control Strategy for Uncertain Polytopic Discrete-time Systems P. Bumroongsri, S. Kheawhom* * Department of Chemical Engineering, Faculty of Engineering, Chulalongkorn University, Bangkok, Thailand, (Tel: 662-218-6893; e-mail: [email protected]). Abstract: In this paper, an off-line synthesis approach to robust constrained model predictive control is presented. Most of the computational burdens are reduced by computing off-line a sequence of state feedback control laws that corresponds to a sequence of polyhedral invariant sets. At each sampling time, the smallest polyhedral invariant set containing the currently measured state is determined and the corresponding state feedback control law is implemented to the process. The proposed algorithm is compared with an ellipsoidal off-line robust model predictive control algorithm. The results show that the proposed algorithm can achieve better control performance. Moreover, a significantly larger feasible region is obtained. The controller design is illustrated with an example of continuous stirred-tank reactor. 1. INTRODUCTION Model predictive control (MPC) is an effective control algorithm widely used in the chemical processes. At each sampling time, MPC uses an explicit process model to solve an open-loop optimization problem. Although an optimal control profile is calculated, only the first computed input is implemented to the process. One of the main drawbacks of MPC is the difficulty to deal with model uncertainty. For this reason, synthesis approaches for robust constrained model predictive control have been widely investigated. Pioneer work in the design of robust MPC by using Linear Matrix Inequalities (LMI) was introduced by Kothare et al., 1996. The algorithm allows an explicit incorporation of model uncertainty in the problem formulation. The goal is to design the state feedback control law, which minimizes the upper bound on the worst-case performance cost. The optimization problem at each time step is formulated as the convex optimization problem involving linear matrix inequalities (LMI). The algorithm is proved to guarantee robust stability. However, the algorithm requires high on-line computational time due to the fact that the optimization problem is really solved on-line at each sampling instant. Moreover, the size of optimization problem grows significantly with respect to the size of polytopic uncertain set. In Brooms et al., 2001, robust MPC for uncertain linear systems with ellipsoidal target sets was presented. The future states are predicted by using a sequence of ellipsoidal sets. The terminal set is restricted to lie in an ellipsoidal invariant set. The algorithm is proved to guarantee robust stability. However, the algorithm requires high on-line computational time due to the fact that the free control inputs { } 1 0 ) / ( − = + N i k i k c are introduced over the perturbation horizon N in order to ensure feasibility and stability. Thus, the number of decision variables and constraints grow significantly with respect to the perturbation horizon N. The on-line robust MPC usually requires high computational demand. Thus, its ability is limited to relatively slow dynamic processes. In order to reduce on-line computational demand, some researchers have begun to study off-line robust MPC. An off-line formulation of robust MPC using linear matrix inequalities was presented by Wan and Kothare, 2003. A sequence of control laws corresponding to a sequence of invariant ellipsoids is computed off-line. At each sampling time, the smallest ellipsoid containing the measured state is determined and the corresponding control law is implemented to the process. Although the algorithm substantially reduces on-line computational burden, the conservative result is obtained due to the fact that an invariant ellipsoid constructed is only the approximation of the true polyhedral invariant set. In Ding et al., 2007, an ellipsoidal off-line robust MPC algorithm based on nominal performance cost was presented. The algorithm directly extends the algorithm of Wan and Kothare, 2003 by choosing the nominal performance cost to substitute the worst-case cost in order to improve the control performance. However, the feasible region is apparently smaller than that of the true polyhedral invariant set. Angeli et al., 2008 proposed an ellipsoidal off-line MPC scheme for uncertain polytopic systems. The ellipsoidal inner approximations of the exact controllable sets are computed off-line and a numerically low demanding optimization problem is solved on-line. Although most of the numerical burdens are move off-line, the feasible region is significantly smaller than the polyhedral counterpart. This is due to the fact that the controllable ellipsoidal sets constructed are only the approximations of the true controllable polyhedral sets. From the preceding review, we can see that most of the off- line robust MPC algorithms use an ellipsoidal approximation of the exact polyhedral invariant set. This leads to conservative results. Moreover, the feasible region is Preprints of the 8th IFAC Symposium on Advanced Control of Chemical Processes The International Federation of Automatic Control Furama Riverfront, Singapore, July 10-13, 2012 © IFAC, 2012. All rights reserved. 655
Transcript of The Polyhedral Off-line Robust Model Predictive Control Strategy for Uncertain Polytopic...

The Polyhedral Off-line Robust Model Predictive Control Strategy for Uncertain Polytopic Discrete-time Systems
P. Bumroongsri, S. Kheawhom*
* Department of Chemical Engineering, Faculty of Engineering, Chulalongkorn University, Bangkok, Thailand, (Tel: 662-218-6893; e-mail: [email protected]).
Abstract: In this paper, an off-line synthesis approach to robust constrained model predictive control is presented. Most of the computational burdens are reduced by computing off-line a sequence of state feedback control laws that corresponds to a sequence of polyhedral invariant sets. At each sampling time, the smallest polyhedral invariant set containing the currently measured state is determined and the corresponding state feedback control law is implemented to the process. The proposed algorithm is compared with an ellipsoidal off-line robust model predictive control algorithm. The results show that the proposed algorithm can achieve better control performance. Moreover, a significantly larger feasible region is obtained. The controller design is illustrated with an example of continuous stirred-tank reactor.
1. INTRODUCTION
Model predictive control (MPC) is an effective control algorithm widely used in the chemical processes. At each sampling time, MPC uses an explicit process model to solve an open-loop optimization problem. Although an optimal control profile is calculated, only the first computed input is implemented to the process. One of the main drawbacks of MPC is the difficulty to deal with model uncertainty. For this reason, synthesis approaches for robust constrained model predictive control have been widely investigated. Pioneer work in the design of robust MPC by using Linear Matrix Inequalities (LMI) was introduced by Kothare et al., 1996. The algorithm allows an explicit incorporation of model uncertainty in the problem formulation. The goal is to design the state feedback control law, which minimizes the upper bound on the worst-case performance cost. The optimization problem at each time step is formulated as the convex optimization problem involving linear matrix inequalities (LMI). The algorithm is proved to guarantee robust stability. However, the algorithm requires high on-line computational time due to the fact that the optimization problem is really solved on-line at each sampling instant. Moreover, the size of optimization problem grows significantly with respect to the size of polytopic uncertain set. In Brooms et al., 2001, robust MPC for uncertain linear systems with ellipsoidal target sets was presented. The future states are predicted by using a sequence of ellipsoidal sets. The terminal set is restricted to lie in an ellipsoidal invariant set. The algorithm is proved to guarantee robust stability. However, the algorithm requires high on-line computational time due to the fact that the free control inputs { } 1
0)/( −=+ Nikikc are introduced over the perturbation horizon
N in order to ensure feasibility and stability. Thus, the
number of decision variables and constraints grow significantly with respect to the perturbation horizon N. The on-line robust MPC usually requires high computational demand. Thus, its ability is limited to relatively slow dynamic processes. In order to reduce on-line computational demand, some researchers have begun to study off-line robust MPC. An off-line formulation of robust MPC using linear matrix inequalities was presented by Wan and Kothare, 2003. A sequence of control laws corresponding to a sequence of invariant ellipsoids is computed off-line. At each sampling time, the smallest ellipsoid containing the measured state is determined and the corresponding control law is implemented to the process. Although the algorithm substantially reduces on-line computational burden, the conservative result is obtained due to the fact that an invariant ellipsoid constructed is only the approximation of the true polyhedral invariant set. In Ding et al., 2007, an ellipsoidal off-line robust MPC algorithm based on nominal performance cost was presented. The algorithm directly extends the algorithm of Wan and Kothare, 2003 by choosing the nominal performance cost to substitute the worst-case cost in order to improve the control performance. However, the feasible region is apparently smaller than that of the true polyhedral invariant set. Angeli et al., 2008 proposed an ellipsoidal off-line MPC scheme for uncertain polytopic systems. The ellipsoidal inner approximations of the exact controllable sets are computed off-line and a numerically low demanding optimization problem is solved on-line. Although most of the numerical burdens are move off-line, the feasible region is significantly smaller than the polyhedral counterpart. This is due to the fact that the controllable ellipsoidal sets constructed are only the approximations of the true controllable polyhedral sets. From the preceding review, we can see that most of the off-line robust MPC algorithms use an ellipsoidal approximation of the exact polyhedral invariant set. This leads to conservative results. Moreover, the feasible region is
Preprints of the 8th IFAC Symposium on Advanced Control of Chemical ProcessesThe International Federation of Automatic ControlFurama Riverfront, Singapore, July 10-13, 2012
© IFAC, 2012. All rights reserved. 655

apparently smaller than that of the true polyhedral invariant set. In this paper, we present an off-line synthesis approach to robust constrained model predictive control using polyhedral invariant sets. A sequence of state feedback control laws that corresponds to a sequence of polyhedral invariant sets is computed off-line. Then the smallest polyhedral invariant set containing the currently measured state is determined on-line and the corresponding state feedback control law is implemented to the process. The paper is organized as follows. In section 2, the problem description is presented. In section 3, the polyhedral off-line robust MPC algorithm is presented. In section 4, we present an example in chemical process to illustrate our algorithm. Finally, in section 5, we conclude the paper. Notation: For a matrix A , TA denotes its transpose,
1−A denotes its inverse. I denotes the identity matrix. For a vector x , )/( kkx denotes the state measured at real time k ,
)/( kikx + denotes the state at prediction time ik +
predicted at real time k . )/(^
kikx + denotes the nominal
state at prediction time ik + predicted at real time k . ],[^^BA
denotes the nominal model of the plant. The symbol ∗ denotes the corresponding transpose of the lower block part of symmetric matrices.
2. PLOBLEM DESCRIPTION
The model considered here is the following linear time varying (LTV) system with polytopic uncertainty:
)()(
)()()()()1(kCxky
kukBkxkAkx=
+=+
(2.1)
where xnkx ℜ∈)( is the state of the plant and unku ℜ∈)( is the control input. Moreover, we assume that
ΩkBkA ∈)](),([ , ]},[],...,[],,{[ 2211 , LL BABABACoΩ = (2.2) where Ω is the polytope, Co denotes convex hull,
],[ jj BA are vertices of the convex hull. Any )](),([ kBkA
within the polytope Ω is a linear combination of the vertices such that
],,[)](),([
1jj
L
jBAkBkA j∑=
=λ 10 ,1
1≤≤=∑
= jL
jj λλ (2.3)
Where ],...,,[ 21 Lλλλλ = is the uncertain parameter vector. The aim of this research is to find a state-feedback control law )/()/( kikKxkiku +=+ (2.4) which stabilizes the system (2.1) and achieves the following nominal performance cost
)(maxmin ,0 ),/(kJnikiku ∞≥+
⎥⎥⎦
⎤
⎢⎢⎣
⎡
++
⎥⎦
⎤⎢⎣
⎡Θ∑
⎥⎥⎦
⎤
⎢⎢⎣
⎡
++=
∞
=∞
)/()/(
00
)/()/()(
^
0
^
,kikukikx
Ri kikukikxkJ
T
n (2.5)
, subject to
max,)/( hh ukiku ≤+ , unh ,...,3,2,1= (2.6) max,)/( rr ykiky ≤+ , ynr ,...,3,2,1= (2.7)
In Ding et al., 2007, min-max predictive control strategy based on nominal performance cost was presented. The goal is to find the state feedback gain K which minimizes the upper bound on the nominal performance cost (2.5). Lemma 2.1: Consider the uncertain system (2.1), the state feedback control law, which minimizes the upper bound γ on the nominal performance cost )(, kJn ∞ and asymptotically stabilizes the closed-loop system is given by
1 ),/()/( −=+=+ YQKkikKxkiku where Y and 1−Q are obtained by solving the following problem: γY,Q min ,γ
0
1s.t. ≥⎥
⎦
⎤⎢⎣
⎡ ∗Qx(k/k)
(2.8)
0
00
0
21
21
^^
≥
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
∗
∗∗+
∗∗∗
γIYR
γIQΘ
QYBQA
Q
(2.9)
Lj
QYBQAQ
jj,...,2,1 ,0 =∀>⎥
⎦
⎤⎢⎣
⎡+
∗ (2.10)
uh,hhT n,,, huX,
QYX
...,21 0 2max =≤≥⎥
⎦
⎤⎢⎣
⎡ ∗ (2.11)
yr,rr
TTjj
n,,r,yL, S...,j
, QCY)BQ(A
S
...,21 ,21
0
2max =≤=∀
≥⎥⎦
⎤⎢⎣
⎡+
∗(2.12)
Proof. Proof details can be found in Ding et al., 2007. Although robust stability of the closed-loop system is guaranteed, the feasible region is significantly smaller than the true polyhedral invariant set. This is due to the fact that an invariant ellipsoid constructed to guarantee robust stability is only an approximation of the true polyhedral invariant set.
8th IFAC Symposium on Advanced Control of Chemical ProcessesFurama Riverfront, Singapore, July 10-13, 2012
656

3. THE POLYHEDRAL OFF-LINE ROBUST MPC STRATEGY
In this section an off-line synthesis approach to robust constrained model predictive control using polyhedral invariant sets is presented. A sequence of state feedback control laws that corresponds to a sequence of polyhedral invariant sets is computed off-line. The approach to construct the polyhedral invariant set developed by Pluymers et al., 2005 is adopted here to construct a sequence of polyhedral invariant sets. At each sampling time, the smallest polyhedral invariant set containing the currently measured state is determined and the corresponding state feedback control law is implemented to the process. Algorithm 3.1: Off-line step 1: Choose a sequence of states { },...,N,ixi 21 , ∈ and solve the following problem to obtain the corresponding state feedback gains 1−= iii QYK (the states ix should be chosen
such that ii QQ <+1 ) γi,Q,Yγ iii min
0
1 s.t. ≥⎥
⎦
⎤⎢⎣
⎡ ∗
ii Qx (3.1)
0
00
0
21
21
^^
≥
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
∗
∗∗+
∗∗∗
IγYR
IγQΘ
QYBQA
Q
ii
ii
iii
i
(3.2)
LjQYBQA
Q
iijij
i ,...,2,1 ,0 =∀>⎥⎦
⎤⎢⎣
⎡+
∗ (3.3)
uh,hh
iTi
n,,,huX,QY
X...,21 0 2
max =≤≥⎥⎦
⎤⎢⎣
⎡ ∗ (3.4)
n,,rySL,j
,QC)YBQ(A
S
yr,rr
iTT
ijij
...,21,,,...,21
0
2max =≤=∀
≥⎥⎦
⎤⎢⎣
⎡+
∗ (3.5)
Off-line step 2: Given the state feedback gains 1−= iii QYK
Ni ...,2,1, = from step1. For each iK , the corresponding
polyhedral invariant set { }iii dxMxS ≤= / is constructed by following these steps:
2.1) Set ,] , , ,[ TT
iTi
TTi KKCCM −−= TTTTT
i uuyyd ],,,[ minmaxminmax= and 1=m .
2.2) Select row m from ),( ii dM and check j∀ whether
miijjmi dxKBAM ,, )( ≤+ is redundant with respect to the
constraints defined by ),( ii dM by solving the following problem:
ii
i,mijji,mi.m
i,mx
dxMd)xKB(AMW
W
≤
−+=
s.t.
max
(3.6)
If 0>i.mW , the constraint
miijjmi dxKBAM ,, )( ≤+ is non-redundant with respect to ).,( ii dM Then, add non-redundant constraints to ),( ii dM by assigning
TTijjmi
Tii KBAMMM ]))((,[ , += and TT
miTii ddd ],[ ,= .
2.3) Let m = m+1 and return to step 2.2. If m is strictly larger than the number of rows in ),( ii dM then terminate. On-line: At each sampling time, determine the smallest polyhedral invariant set { }iii dxMxS ≤= / containing the measured state and implement the corresponding state feedback control law )/()/( kkxKkku i= to the process. Remark 3.1 The number of chosen states N affects control performance. Although the feedback gain iK is guaranteed
to drive all states within iS to the origin, it’s not necessary to keep this feedback gain constant. By increasing the number of iS (This is done by increasing the number of chosen
states N ), the control performance is improved due to the fact that we have more freedom to adopt varying feedback gains based on the distance between the state and the origin. Remark 3.2 Although the construction of polyhedral invariant sets is more computationally demanding than the construction of ellipsoidal invariant sets, this is done off-line and thus the on-line computation is tractable. An overall algorithm is proved to guarantee robust stability in Theorem 3.1. Theorem 3.1 Given the initial measured state 1)( Skx ∈ , algorithm 3.1 asymptotically stabilizes the closed-loop system. Proof. The satisfaction of (3.3) for the state feedback gain
1−= iii QYK ensures that
0)/()},(])()([),1(])()({[)/(
<+−++++++++kikxkiPKikBikA
kiPKikBikAkikx
i
Ti
T (3.7)
8th IFAC Symposium on Advanced Control of Chemical ProcessesFurama Riverfront, Singapore, July 10-13, 2012
657

Thus, )/(),()/(),( kikxkiPkikxkiV T ++= is a strictly decreasing Lyapunov function and the closed-loop system is robustly stabilized by the state feedback gain iK . By solving (3.6) and iteratively adding non-redundant constraints miijjmi dxKBAM ,, )( ≤+ to ),( ii dM by
assigning TTijjmi
Tii KBAMMM ]))((,[ , += and TT
miTii ddd ],[ ,= ,
we can find the set of initial states x defined by { }iii dxMxS ≤= / such that all future states are
guaranteed to stay within this set without input and output constraints violation. Any initial states outside iS lead to the future states that violate input and output constraints for at least one realization of the uncertainty. Thus, the set iS is polyhedral invariant set and the
corresponding state feedback gain iK assures robust stability to the closed-loop system.
4. EXAMPLE In this section, we present an example that illustrate the implementation of the proposed robust MPC algorithm. The numerical simulations have been performed in Intel Core i-5 (2.4GHz), 2 GB RAM, using SeDuMi (Sturm, 1999) and YALMIP (Löfberg, 2004) within Matlab R2008a environment. In this example, we will consider the application of our approach to an uncertain non-isothermal CSTR where the exothermic reaction BA ⎯→⎯ takes place. The reaction is irreversible and the rate of reaction is first order with respect to component A . A cooling coil is used to remove heat that is released in the exothermic reaction. The reaction rate constant ok and the heat of reaction rxnHΔ are considered to be the uncertain parameters. The linearized model based on the component balance and the energy balance is given as follows (For more details, the reader is referred to Wan and Kothare, 2003)
⎥⎦
⎤⎢⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−
+⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
Δ−−−Δ−
−−−
=⎥⎥⎦
⎤
⎢⎢⎣
⎡
−−
−−
C
FA
p
S
A
ASRTE
oSp
rxnpp
RTE
orxn
ASRTE
oS
RTE
o
A
FC
CVTx
VF
TC
CekRTCEH
CVUA
VF
CekH
CekRTEek
VF
TC
SS
SS
,
5
2
2
.
.
36510098.20
0
ρ
ρρρ
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=
TCy A
1001 (4.1)
Where AC is the concentration of A in the reactor, FAC , is
the feed concentration of A , T is the reactor temperature and cF is the coolant flow. The operating parameters are shown in table 4.1.
Table 4.1. The operating parameters of non-isothermal CSTR
Parameter Value Unit
F 1 m3/min V 1 m3 ρ 106 g/m3
pC 1 cal/g.K
rxnHΔ 107-108 cal/kmol
RE / 8330.1 K
ok 109-1010 min-1 UA 5.34x106 cal/K.min
Let ,,eqAAA CCC −= ,eqTTT −= eqFAFAFA CCC ,,,, −= and
eqccc FFF ,−= . By discretization (4.1) using a sampling time
of 0.15 min, the discrete-time model is given as follows
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−
+⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎥⎦
⎤⎢⎣
⎡+−−
=⎥⎦
⎤⎢⎣
⎡++
)()(
912.00015.0
)(
)(
)()(01403.00487.0)()(9864.0)(0014.0)(0986.085.0
)1()1(
,
kFkC
kT
kC
kkkkkk
kTkC
C
FAA
A
βαβααα
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=)(
)(1001
)(kT
kCky
A (4.2)
where 1010/)(1 9 ≤=≤ okkα and 1010/)(1 7 ≤Δ−=≤ rxnHkβ . Because two uncertain parameters )(kα and )(kβ are independent of each other, we have to consider the polytopic uncertain model with its four vertices representing all the possible combinations of the two uncertain parameters. The polytopic uncertain set is given as follows
}451.1644.98014.0136.0
,189.0864.9014.0136.0
,189.0864.90014.0751.0
,063.0986.00014.0751.0
{
⎥⎦
⎤⎢⎣
⎡ −−⎥⎦
⎤⎢⎣
⎡ −−
⎥⎦
⎤⎢⎣
⎡ −⎥⎦
⎤⎢⎣
⎡ −=Ω Co
(4.3) The objective is to regulate the concentration AC and the reactor temperature T to the origin by adjusting the feed concentration FAC , and the coolant flow
cF . The constraints are 3
, kmol/m 5.0≤FAC and min/m 5.1 3≤CF . Here
)(, kJn ∞ is given by (2.5) with I=Θ and .1.0 IR = The proposed algorithm will be compared with an ellipsoidal off-line robust MPC algorithm of Wan and Kothare, 2003. Figure 4.1 shows the comparison between the feasible regions of the proposed algorithm and the algorithm of Wan and Kothare, 2003. It is seen that the feasible region of the proposed algorithm is significantly larger than that of Wan and Kothare, 2003. This is due to the fact that the invariant ellipsoids constructed by the algorithm of Wan and Kothare, 2003 are only the approximations of the true polyhedral invariant sets.
8th IFAC Symposium on Advanced Control of Chemical ProcessesFurama Riverfront, Singapore, July 10-13, 2012
658
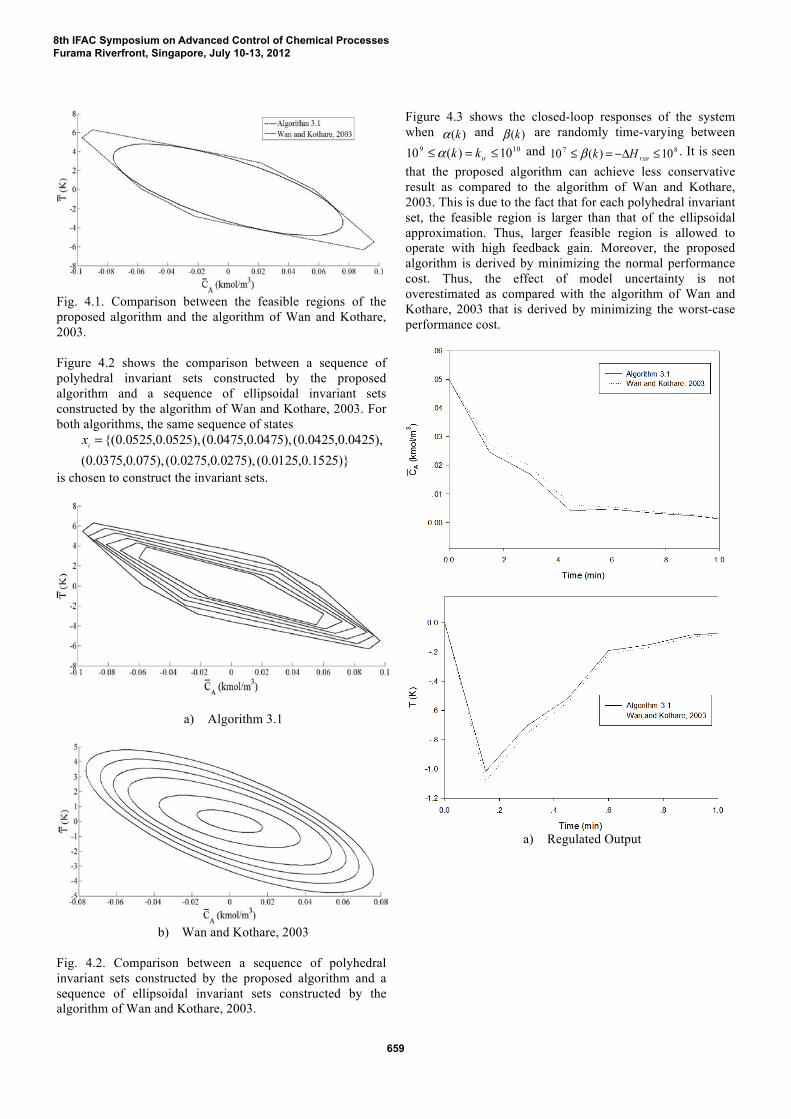
Fig. 4.1. Comparison between the feasible regions of the proposed algorithm and the algorithm of Wan and Kothare, 2003. Figure 4.2 shows the comparison between a sequence of polyhedral invariant sets constructed by the proposed algorithm and a sequence of ellipsoidal invariant sets constructed by the algorithm of Wan and Kothare, 2003. For both algorithms, the same sequence of states
)}1525.0,0125.0(),0275.0,0275.0(),075.0,0375.0(),0425.0,0425.0(),0475.0,0475.0(),0525.0,0525.0{(=ix
is chosen to construct the invariant sets.
a) Algorithm 3.1
b) Wan and Kothare, 2003
Fig. 4.2. Comparison between a sequence of polyhedral invariant sets constructed by the proposed algorithm and a sequence of ellipsoidal invariant sets constructed by the algorithm of Wan and Kothare, 2003.
Figure 4.3 shows the closed-loop responses of the system when )(kα and )(kβ are randomly time-varying between
109 10)(10 ≤=≤ okkα and 87 10)(10 ≤Δ−=≤ rxnHkβ . It is seen that the proposed algorithm can achieve less conservative result as compared to the algorithm of Wan and Kothare, 2003. This is due to the fact that for each polyhedral invariant set, the feasible region is larger than that of the ellipsoidal approximation. Thus, larger feasible region is allowed to operate with high feedback gain. Moreover, the proposed algorithm is derived by minimizing the normal performance cost. Thus, the effect of model uncertainty is not overestimated as compared with the algorithm of Wan and Kothare, 2003 that is derived by minimizing the worst-case performance cost.
a) Regulated Output
8th IFAC Symposium on Advanced Control of Chemical ProcessesFurama Riverfront, Singapore, July 10-13, 2012
659

b) Control input
Fig. 4.3. The closed-loop responses of the system when )(kα and )(kβ are randomly time-varying between
109 10)(10 ≤=≤ okkα and 87 10)(10 ≤Δ−=≤ rxnHkβ . Figure 4.4. shows the cumulative cost. It can be observed that the proposed algorithm can achieve better control performance as compared to robust MPC algorithm of Wan and Kothare, 2003.
Fig. 4.4. The cumulative cost ∑=
+Θt
i
TT iRuiuixix0
)()()()(
5. CONCLUSIONS
In this paper, we have presented an off-line synthesis approach to robust constrained model predictive control using polyhedral invariant sets. A sequence of state feedback control laws that corresponds to a sequence of polyhedral invariant sets is computed off-line. Then the smallest polyhedral invariant set containing the currently measured state is determined on-line and the corresponding state feedback control law is implemented to the process. An overall algorithm is proved to guarantee robust stability. The controller design is illustrated with an example of continuous stirred-tank reactor.
ACKNOWLEDGEMENT
The authors gratefully acknowledge the financial support provided by the Higher Education Research Promotion and National Research University Project of Thailand, Office of the Higher Education Commission (EN636A).
REFERENCES
Angeli, D., A. Casavola, G. Franze and E. Mosca (2008). An ellipsoidal off-line MPC scheme for uncertain polytopic discrete-time systems. Automatica, 44, 3113-3119. Brooms, A.C., B. Kouvaritakis and Y.I. Lee (2001). Constrained MPC for uncertain linear systems with ellipsoidal target sets. Syst. Control Lett., 44, 157-166. Ding, B.C., Y. Xi, M.T. Cychowski and T.O. Mahony (2007). Improving off-line approach to robust MPC based-on nominal performance cost. Automatica, 43, 158-163. Kothare, M.V., V. Balakrishnan and M. Morari (1996). Robust constrained model predictive control using linear matrix inequalities. Automatica, 32, 1361-1379. Löfberg J. (2004). YALMIP : A toolbox for modeling and optimization in MATLAB. Proceedings of the IEEE international symposium on computer aided control systems design, Taipei, Taiwan. Pluymers, B., J.A. Rossiter, J.A.K. Suykens and B.D. Moor (2005).The efficient computation of polyhedral invariant sets for linear systems with polytopic uncertainty. Proceedings of the American Control Conference, Portland, USA. Sturm, J.F (1999). Using Sedumi 1.02, a MATLAB toolbox for optimization over symmetric cones. Optim. Method Softw., 11, 625-653. Wan, Z. and M.V. Kothare (2003). An efficient off-line formulation of robust model predictive control using linear matrix inequalities. Automatica, 39, 837-846.
8th IFAC Symposium on Advanced Control of Chemical ProcessesFurama Riverfront, Singapore, July 10-13, 2012
660




















