
The generalized SEA and a statistical signal processing approach applied to UXO discrimination
11
The Generalized SEA and a statistical signal processing approach applied to UXO discrimination Irma Shamatava (1,2) , Fridon Shubitidze (1,2) , Ben Barrowes (3) , Eugene Demidenko (2) , Juan Pablo Fernández (1) , Kevin O’Neill (1,3) (1) Sky Research, Inc., Hanover, NH 03755 (2) Thayer School of Engineering, Dartmouth College, Hanover, NH 03755, USA (3) USA ERDC Cold Regions Research and Engineering Laboratory, 72 Lyme Road, Hanover, NH 03755, USA Abstract -- The prohibitive costs of excavating all geophysical anomalies are well known and are one of the greatest impediments to efficient clean-up of unexploded ordnance (UXO)-contaminated lands at Department of Defense (DoD) and Department of Energy (DOE) sites. Innovative discrimination techniques that can reliably distinguish between hazardous UXO and non-hazardous metallic items are required. The key element to overcoming these difficulties lies in the development of advanced processing techniques that can treat complex data sets to maximize the probability of accurate classification and minimize the false alarm rate. To address these issues, this paper uses a new approach that combines a physically complete EMI forward model called the Generalized Standardized Excitation Approach (GSEA) with a statistical signal processing approach named Mixed Modeling (MM). UXO discrimination requires the inversion of digital geophysical data, which could be divided into two pars: 1) linear - estimating model parameters such as the amplitudes of the responding GSEA sources and 2) non-linear - inverting an object’s location and orientation. Usually the data inversion is an ill-posed problem that requires regularization. Determining the regularization parameter is not straightforward, and in many cases depends on personal experience. To overcome this issue, in this paper we employ the statistical approach to estimate regularization parameters from actual data using the un-surprised mixed model approach. In addition, once the non-linear inverse scattering parameters are estimated then for UXO discrimination a covariance matrix and confidence interval are derived. The theoretical basis and practical realization of the combined GSEA-Mixed Model algorithm are demonstrated. Discrimination studies are done for ATC-UXO sets of time-domain EMI data collected at the ERDC UXO test stand site in Vicksburg, Mississippi. Key words; Discrimination, UXO, Statistics, Mixed Models, Regularization, EMI, spheroidal modes, Generalized SEA 1. INTRODUCTION Electromagnetic induction (EMI) inversion methodologies together with low-frequency EM sensing technologies have been identified as one of most promising approaches for the detection and mapping of subsurface metallic objects, in particular for localization and discrimination of subsurface unexploded ordnance (UXO) [1]-[5]. The technologies have been used effectively to discriminate between UXO and non- UXO items under well-controlled conditions [1]-[22]. However, under real field conditions, distinguishing an object of interest from innocuous items still remains the number one problem that the UXO community faces. UXO discrimination is an inverse problem that demands a fast and accurate representation of a target’s EMI response. Recently, this has been achieved by developing physically complete forward models, such as the multi-dipole model [21], the normalized surface source method [16], and the generalized standardized excitation approach [17]-[20]. These models use a set of model parameters, instead of using few model parameters such as a simple dipole model [6], [11], [12]. For example, the GSEA uses a set of magnetic dipoles for each fundamental spheroidal mode excitation. Extracting these model parameters from limited sets of actual data is an ill-posed inverse scattering problem that requires regularization. This paper combines Detection and Sensing of Mines, Explosive Objects, and Obscured Targets XIII, edited by Russell S. Harmon, John H. Holloway, Jr., J. Thomas Broach, Proc. of SPIE Vol. 6953, 69531G, (2008) · 0277-786X/08/$18 · doi: 10.1117/12.777885 Proc. of SPIE Vol. 6953 69531G-1 2008 SPIE Digital Library -- Subscriber Archive Copy
Transcript of The generalized SEA and a statistical signal processing approach applied to UXO discrimination

The Generalized SEA and a statistical signal processing approach
applied to UXO discrimination
Irma Shamatava(1,2), Fridon Shubitidze(1,2), Ben Barrowes(3), Eugene Demidenko(2), Juan Pablo Fernández(1), Kevin O’Neill(1,3)
(1) Sky Research, Inc., Hanover, NH 03755 (2) Thayer School of Engineering, Dartmouth College, Hanover, NH 03755, USA
(3) USA ERDC Cold Regions Research and Engineering Laboratory, 72 Lyme Road, Hanover, NH 03755, USA
Abstract -- The prohibitive costs of excavating all geophysical anomalies are well known and are one of the greatest impediments to efficient clean-up of unexploded ordnance (UXO)-contaminated lands at Department of Defense (DoD) and Department of Energy (DOE) sites. Innovative discrimination techniques that can reliably distinguish between hazardous UXO and non-hazardous metallic items are required. The key element to overcoming these difficulties lies in the development of advanced processing techniques that can treat complex data sets to maximize the probability of accurate classification and minimize the false alarm rate. To address these issues, this paper uses a new approach that combines a physically complete EMI forward model called the Generalized Standardized Excitation Approach (GSEA) with a statistical signal processing approach named Mixed Modeling (MM). UXO discrimination requires the inversion of digital geophysical data, which could be divided into two pars: 1) linear - estimating model parameters such as the amplitudes of the responding GSEA sources and 2) non-linear - inverting an object’s location and orientation. Usually the data inversion is an ill-posed problem that requires regularization. Determining the regularization parameter is not straightforward, and in many cases depends on personal experience. To overcome this issue, in this paper we employ the statistical approach to estimate regularization parameters from actual data using the un-surprised mixed model approach. In addition, once the non-linear inverse scattering parameters are estimated then for UXO discrimination a covariance matrix and confidence interval are derived. The theoretical basis and practical realization of the combined GSEA-Mixed Model algorithm are demonstrated. Discrimination studies are done for ATC-UXO sets of time-domain EMI data collected at the ERDC UXO test stand site in Vicksburg, Mississippi.
Key words; Discrimination, UXO, Statistics, Mixed Models, Regularization, EMI, spheroidal modes, Generalized SEA
1. INTRODUCTION
Electromagnetic induction (EMI) inversion methodologies together with low-frequency EM sensing technologies have been identified as one of most promising approaches for the detection and mapping of subsurface metallic objects, in particular for localization and discrimination of subsurface unexploded ordnance (UXO) [1]-[5]. The technologies have been used effectively to discriminate between UXO and non-UXO items under well-controlled conditions [1]-[22]. However, under real field conditions, distinguishing an object of interest from innocuous items still remains the number one problem that the UXO community faces. UXO discrimination is an inverse problem that demands a fast and accurate representation of a target’s EMI response. Recently, this has been achieved by developing physically complete forward models, such as the multi-dipole model [21], the normalized surface source method [16], and the generalized standardized excitation approach [17]-[20]. These models use a set of model parameters, instead of using few model parameters such as a simple dipole model [6], [11], [12]. For example, the GSEA uses a set of magnetic dipoles for each fundamental spheroidal mode excitation. Extracting these model parameters from limited sets of actual data is an ill-posed inverse scattering problem that requires regularization. This paper combines
Detection and Sensing of Mines, Explosive Objects, and Obscured Targets XIII,edited by Russell S. Harmon, John H. Holloway, Jr., J. Thomas Broach,
Proc. of SPIE Vol. 6953, 69531G, (2008) · 0277-786X/08/$18 · doi: 10.1117/12.777885
Proc. of SPIE Vol. 6953 69531G-12008 SPIE Digital Library -- Subscriber Archive Copy
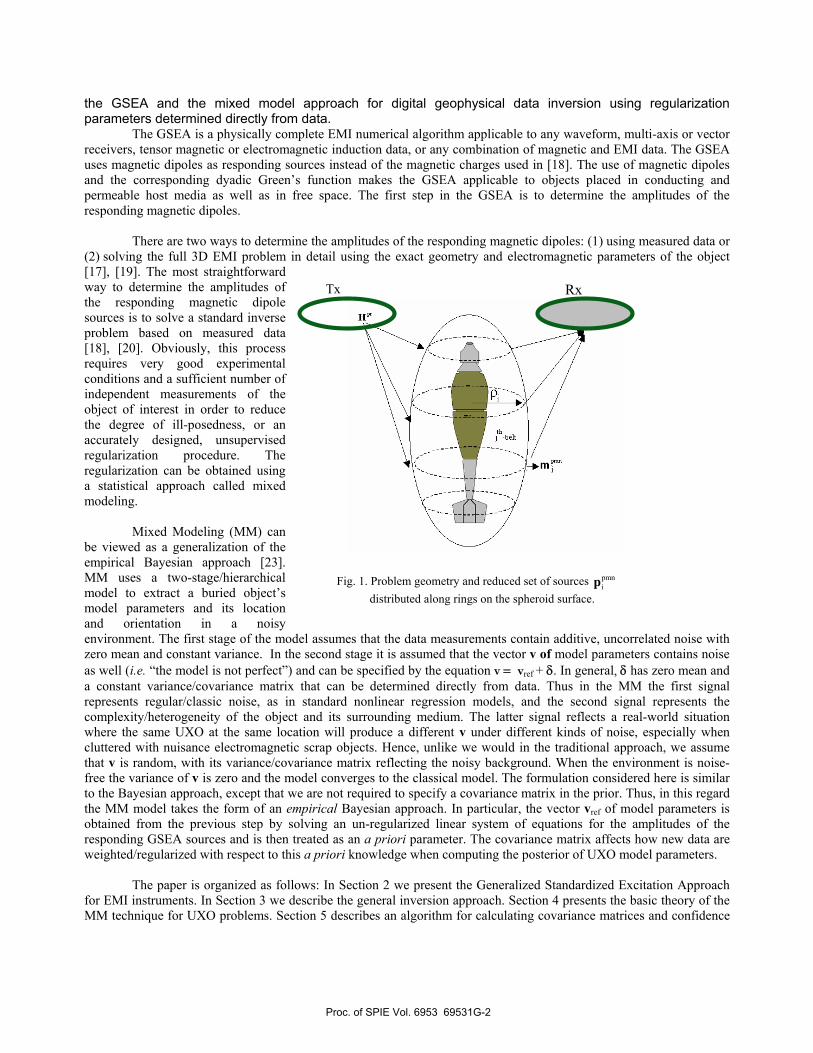
the GSEA and the mixed model approach for digital geophysical data inversion using regularization parameters determined directly from data. The GSEA is a physically complete EMI numerical algorithm applicable to any waveform, multi-axis or vector receivers, tensor magnetic or electromagnetic induction data, or any combination of magnetic and EMI data. The GSEA uses magnetic dipoles as responding sources instead of the magnetic charges used in [18]. The use of magnetic dipoles and the corresponding dyadic Green’s function makes the GSEA applicable to objects placed in conducting and permeable host media as well as in free space. The first step in the GSEA is to determine the amplitudes of the responding magnetic dipoles.
There are two ways to determine the amplitudes of the responding magnetic dipoles: (1) using measured data or (2) solving the full 3D EMI problem in detail using the exact geometry and electromagnetic parameters of the object [17], [19]. The most straightforward way to determine the amplitudes of the responding magnetic dipole sources is to solve a standard inverse problem based on measured data [18], [20]. Obviously, this process requires very good experimental conditions and a sufficient number of independent measurements of the object of interest in order to reduce the degree of ill-posedness, or an accurately designed, unsupervised regularization procedure. The regularization can be obtained using a statistical approach called mixed modeling.
Mixed Modeling (MM) can
be viewed as a generalization of the empirical Bayesian approach [23]. MM uses a two-stage/hierarchical model to extract a buried object’s model parameters and its location and orientation in a noisy environment. The first stage of the model assumes that the data measurements contain additive, uncorrelated noise with zero mean and constant variance. In the second stage it is assumed that the vector v of model parameters contains noise as well (i.e. “the model is not perfect”) and can be specified by the equation v = vref + δ. In general, δ has zero mean and a constant variance/covariance matrix that can be determined directly from data. Thus in the MM the first signal represents regular/classic noise, as in standard nonlinear regression models, and the second signal represents the complexity/heterogeneity of the object and its surrounding medium. The latter signal reflects a real-world situation where the same UXO at the same location will produce a different v under different kinds of noise, especially when cluttered with nuisance electromagnetic scrap objects. Hence, unlike we would in the traditional approach, we assume that v is random, with its variance/covariance matrix reflecting the noisy background. When the environment is noise-free the variance of v is zero and the model converges to the classical model. The formulation considered here is similar to the Bayesian approach, except that we are not required to specify a covariance matrix in the prior. Thus, in this regard the MM model takes the form of an empirical Bayesian approach. In particular, the vector vref of model parameters is obtained from the previous step by solving an un-regularized linear system of equations for the amplitudes of the responding GSEA sources and is then treated as an a priori parameter. The covariance matrix affects how new data are weighted/regularized with respect to this a priori knowledge when computing the posterior of UXO model parameters.
The paper is organized as follows: In Section 2 we present the Generalized Standardized Excitation Approach
for EMI instruments. In Section 3 we describe the general inversion approach. Section 4 presents the basic theory of the MM technique for UXO problems. Section 5 describes an algorithm for calculating covariance matrices and confidence
Fig. 1. Problem geometry and reduced set of sources pmnip
distributed along rings on the spheroid surface.
Tx Rx
Proc. of SPIE Vol. 6953 69531G-2

intervals. Section 6 shows some experimental and numerical results which demonstrate the applicability of the combined GSEA-MM approach to UXO discrimination using actual EM-63 TD data. Finally, in Section 7 we discuss and offer some conclusions.
2. GENERALIZED STANDARDIZED EXCITATION APPROACH FOR EMI SENSORS
Recently, an SEA based on fictitious magnetic charges has been developed and applied to UXO discrimination using both frequency-domain and time-domain EMI data [17]–[20]. Here, the GSEA [20], which is based on magnetic dipoles as responding sources and is thus applicable to conducting and magnetically susceptible host media, is combined with the MM statistical approach and extended to consider data generated by the TD EM-63 sensor. To illustrate the GSEA for a TD sensor, let us assume that an object is placed in free space (see Fig. 1). The object is illuminated by an arbitrarily oriented, time-varying primary magnetic field. In the EMI frequency regime, displacement currents within and outside the object are assumed to be zero; i.e., both the primary and the scattered magnetic fields are irrotational. We surround the object with a fictitious spheroid, which is introduced only as a computational aid in the decomposition of the primary magnetic field into fundamental spheroidal modes. We choose spheroids because they can assume the general proportions of elongated objects of interest, such as UXO, which are typically bodies of revolution (BOR). Oblate spheroids can also be used for flattened shapes. In general, the fictitious surface could be any smooth closed surface, as applicable for a related standardized source set approximation described in [17]–[20]. On the fictitious spheroid given by ξ = ξo (Fig. 1), the primary magnetic field can be expressed as
1
pr prpmn pmn
m 0 n m p 0
b∞ ∞
= = =
= ∑ ∑∑H H . (1)
The pmnb are coefficients needed to express the primary field, and the pr
pmnH is the pmn mode of the primary
magnetic field component when pmnb = 1. The spheroidal expansion coefficients bpmn can be determined from the normal component of the primary magnetic field on the fictitious spheroid [19].
After the primary magnetic field is decomposed into the pmn spheroidal modes, the complete response of the target
to each prpmnH field can be obtained. Finally, the target’s full response is
1
sc sc scpmn pmn
m 0 n m p 0( , t) b ( , t) ( , t)
∞ ∞
= = =
= ∇× = ∇×∑ ∑∑B r A r A r , (2)
sph
pmnsc opmn 3
S
( ', t)( , t) ds '
4 R×µ
=π ∫
m r RA r , (3)
where sc
pmnA is the pmn mode of the scattered vector potential, sc ( , t)A r is the total scattered potential, pmn ( ', t)m r are the responding magnetic dipoles distributed on the fictitious spheroidal surface, r and r' are the radius vectors of the observation and source points respectively, and R = r – r'. Note that in the EMI range the secondary magnetic field is irrotational, which means that the scattered field propagates outside the object instantaneously; i.e., there is no time delay in equation (2). By using the Green’s function, the scattered magnetic field is approximated by the response of a set of magnetic dipoles oriented normally to the fictitious spheroidal surface of Fig. 1: ( )pmn pmn ˆ( ', t) M ( ', t) '= ⋅m r r n r , (4)
Proc. of SPIE Vol. 6953 69531G-3

where ( )ˆ 'n r is the normal unit vector at point r' on the spheroidal surface and the pmnM ( ', t)r are the amplitudes of the responding sources. A TD sensor measures the time derivative of the magnetic flux through the receiver coil:
r r
scsc sc
S S L
( ,t)Signal d ' = rot ( ,t) d ' = A ( ',t) d 't t t
∂ ∂ ∂=
∂ ∂ ∂∫ ∫ ∫B r s A r s l l l . (5)
Inserting equations (2) and (4) into (5),
sph
1pmn
pmnm 0 n m p 0L S
M ( ', t)Signal b ( ', )ds ' d '
t
∞ ∞
= = =
⎡ ⎤∂⎢ ⎥= ⋅
∂⎢ ⎥⎣ ⎦∑ ∑∑∫ ∫
rG r r l (6)
is obtained, where
( )o
3
ˆ '( ', )
4 R×µ
=π
n r RG r r (7)
and the pmn ' pmnM ( ', t)M ( ', t)
t∂
=∂
rr are the time derivatives of the amplitudes of the responding magnetic dipoles
that need to be determined from the measured data.
Since many if not all UXO are bodies of revolution (BOR), it is desirable to simplify equation (6) for BOR objects. After dividing the fictitious spheroid surface into J belts (as in Fig. 1) and taking into account the BOR symmetry of the object, the amplitude of the responding ' pmnM ( ', t)r source around the jth belt can be expanded into a Fourier series with respect to the azimuthal angle ϕ , and equation (6) can be rewritten as
jsph
J 1' mn
j j 0mn 1mn jm 0 n m j p 0L S
Signal( ) M ( , t) (b cos(m ) b sin(m )) ( ', )ds ' d ' ∞ ∞
= = = ∆
⎡ ⎤⎢ ⎥= ρ ϕ + ϕ ⋅⎢ ⎥⎣ ⎦∑ ∑∑ ∑∫ ∫r G r r l . (8)
Finally, the EMI scattered fields from all J belts are set to equal the measured signal at a point r where the secondary field arising from the scatterer is known. For k , k=1, 2, ..., Kr points, equation (8) leads to a linear system of equations that can be solved using a least-squares minimization algorithm. However, this linear system of equations is an ill-posed problem and requires regularization.
3. TWO STEP DATA INVERSION APPROACH When discriminating UXO from non-UXO items using digital geophysical data we must first invert for the buried object’s location, orientation, and other parameters, such as the amplitudes of the responding GSEA sources. An object’s response depends linearly on the amplitudes of the responding GSEA sources and non-linearly on its location and orientation. Therefore it is easy to split the inversion scheme into two parts, one linear and one non-linear. Location and orientation are routinely estimated by minimizing an objective function that measures the misfit between the forward model and the measurement data; this minimization is usually carried out using the least squares (LS) approach [23]-[27]. Specifically, if obsd is the vector of the measured scattered field and ( )F v the forward problem solution, the least squares criterion assumes the form
Proc. of SPIE Vol. 6953 69531G-4

( ) 2minimize ( ) .= −obsv d F vφ (9)
The vector v also contains the object’s location and orientation. The LS criterion contains several implicit assumptions:
1) Deviations of the measured field from the theoretical estimates derived from the forward problem are assumed to be random numbers. Furthermore, it is assumed that these random numbers are independent of each other and have zero mean and constant variance. LS reconstruction is optimal if the deviations from the model obey a Gaussian distribution [24].
2) The only discrepancy between observations and the forward model is the measurement error at the stage of the magnetic field recording. It does not take into account more fundamental and profound errors associated with hardware and sensor motion and orientation.
3) No a priori information about UXO and no regularization are involved in the reconstruction, which leads to unstable results.
All these assumptions may hold when inverting for an object’s location and orientation (non-linear part) but are likely to be violated when estimating amplitudes of responding GSEA sources, which are sensitive to measurement errors associated with hardware or signal drift. Usually, to reduce effects originating from the sensor, measurement error, or background noise, the objective function with respect to linear model parameters, such as the amplitudes of GSEA sources, is written as the sum of a data misfit term and regularization parameter times a penalty term as follows:
( ) ( ) 2 2minimize
1 ( )2 2
⎡ ⎤= − + −⎣ ⎦obsm d F m m mref
αφ , (10)
where α is the regularization parameter. The model vector m consists of the model vectors (i.e., the amplitudes of the responding GSEA sources) for the targets. Determining the regularization parameter α and the vector mref is one of the most difficult problems encountered during data inversion. The next section outlines a detailed procedure for estimating these parameters via the Mixed Model approach.
4. MIXED MODEL
The estimation of model parameters with the purpose of UXO identification is an ill-posed inverse problem that results in instability of the inversion (different starting points may lead to different final iteration values). One may remediate this instability by incorporating a priori information about the properties of the scatterer. Here we suggest a method based on the total magnetic dipole moment for each fundamental spheroidal mode. Since in the GSEA approach the total magnetic dipole moment for each fundamental mode is of major interest, one may concentrate on estimating its average value, ' pmnM< > . The amplitudes of the responding GSEA magnetic dipoles on the spheroidal surface can be written in the MM approach as
' pmn ' pmnM M=< > +δ (11) where ' pmnM< > is the average magnetic dipole and δ are random deviations from ' pmnM< > with the properties 0< δ >= and 2var( ) .δδ = σ The UXO model can then be expressed as
sph
1
pmn pmnpmn 0L S
ˆSignal M ( ', t) b ( ') ( ', )ds ' d ' =
⎡ ⎤⎢ ⎥= < > ⋅ η⎢ ⎥⎣ ⎦
∑∫ ∫r n r G r r l + (12)
Proc. of SPIE Vol. 6953 69531G-5

where η is a random variable with zero mean and variance
2 2 2var( ) H ( ; ); δη = σ + σ m r where sph
1
pmn pmnpmn 0L S
ˆH( ; ) M ' ( ', t) b ( ') ( ', )ds ' d ' =
⎡ ⎤⎢ ⎥= < > ⋅⎢ ⎥⎣ ⎦
∑∫ ∫m r r n r G r r l .(13)
This statistical model is a mixed model and belongs to the family of nonlinear marginal models [23]. Using MM the regularization parameter α in equation (10) can be found directly from actual data by regressing the squared residuals of the variance var( )η as a linear function of 2σ and 2
δσ , where m is taken from the previous iteration.
5. COVARIANCE MATRIX AND CONFIDENCE INTERVALS After the object location parameters (x0; y0; z0) and orientation angles ( θ , ϕ ) are determined, we can compute the covariance matrix, the standard errors (SE), and the confidence intervals (CI) for all parameters. As follows from a nonlinear regression model [23], assuming that errors are additive,
( ) 12ˆ ' −σ J Jcov = (14) where 2σ̂ is the regression variance
( )22 1ˆL
σ = −∑ ij ijij
h H . (15)
After the covariance matrix is computed we can find the 95% CI for location and orientation and for the amplitudes of the GSEA sources as ( jm 1.96± js ), where sj is the square root of the jth diagonal element of the covariance matrix.
6. RESULTS
In this section we apply the combined GSEA/MM approach to data taken with the Geonics Ltd. Time-domain EM-63 sensor [2]. The sensor consists of a 1 m × 1 m square transmitter loop and two receiver loops: (1) a main receiver loop of size 0.5 m × 0.5 m whose center coincides with that of the transmitter coil center, and (2) a second loop of the same size placed 60 cm above the main receiver coil. These receivers accurately measure the complete transient response over a wide dynamic range of time from 180 µs to 25 ms. The time domain measurements were conducted at the UXO test-stand of the U.S. Army Corps of Engineers Engineer Research and Development Center (USACE-ERDC) Laboratory in Vicksburg, MS. The measurement platform, which is made with nonmetallic fiberglass materials, has a usable measurement area of extent 3 m × 4 m. The sensor is mounted on a robotic arm that can be moved and controlled around the measurement area using software run on a personal computer. Similarly automated remote controls are used to position an ordnance item at a given depth (accurate to within 1 cm) below the measurement area. The sensor can be positioned with an accuracy of approximately 1 mm. All data presented here were collected by personnel from SKY Research, Inc.
Proc. of SPIE Vol. 6953 69531G-6

00
To demonstrate the applicability of the combined GSEA/MM approach as a robust forward model for predicting EMI data we first investigate the accuracy of the technique against actual TD data. Figure 2 shows a comparison between GSEA predictions and measured data for a 2.75 inch rocket at three time channels: the 1st channel, corresponding to very early times, the 15th channel for intermediate times, and the 20th channel for very late times. The object is oriented 45 degrees, with the nose pointing up. In the GSEA approach, the object’s response is modeled with N = 7 responding magnetic dipoles for each pmn fundamental spheroidal mode, with pmn = 1, 2, …, 14. The dipoles are placed on a prolate spheroidal surface with semimajor axis a = 25 cm and semiminor axis b = 8 cm. The results show that the GSEA/MM technique predicts the EMI response of the 2.75 inch rocket very accurately at all three times, even though the underlying physics of EMI scattering is very different at these ranges. For example, at the early time only induced surface currents produce a response, and therefore the object’s heterogeneity has at most a minimal effect; thus the response could be predicted very well using only the first few modes. On the other hand, at late times the induced currents are distributed entirely inside the volume and different metallic sections will contribute differently to the object’s EMI response; hence in this situation the higher modes are needed.
0 100 200 300 400-50
0
50
100
150
200
Res
pons
e [m
V/m
]
Obesr. points number
Predicted dataActual DataTime channel #15
0 100 200 300 400-5
0
5
10
15
20
25
30
35
Res
pons
e [m
V/m
]
Obesr. points number
Predicted dataActual DataTime channel #20
0 100 200 300 400-200
0
200
400
600
800
1000
Res
pons
e [m
V/m
]
Obesr. points number
Predicted dataActual DataTime channel #1
Figure 2. 2.75 inch rocket
Figure 3. Comparison between predicted data (for N = 7 GSEA sources and modes with pmn = 1, 2, …, 14) and actual EM-63 data for a 2.75-inch rocket at 60 cm height: a) first b) 14th and c) 20th time channels.
Proc. of SPIE Vol. 6953 69531G-7

20 40 60 80-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2 x 1010
GSEA dipoles number
Apl
itude
s of
GS
EA
dip
oles
[Arb
]Un-regularized
20 40 60 80-3
-2
-1
0
1
2
3 x 107
GSEA dipoles number
Apl
itude
s of
GS
EA
dip
oles
[Arb
]
Regularized
Proc. of SPIE Vol. 6953 69531G-8

Figure 4. Amplitudes of un-regularized (top) and regularized (bottom) GSEA dipoles. Next were study how mixed-model regularization improves the distribution of GSEA dipoles on the fictitious
spheroidal surface. Figure 4 shows the amplitudes of the un-regularized (top) and regularized (bottom) GSEA dipoles. The amplitudes are depicted for all N=7 GSEA dipoles for all pmn modes with pmn = 1, 2, …, 14 The first seven amplitudes correspond to the mode with pmn = 1 mode, the next seven to pmn = 2, etc. The comparison clearly shows that the spatial distribution of the GSEA dipoles improves significantly after the MM regularization. It is worth noticing that the predicted EMI responses with and without regularization produce the same mismatch against actual measured data at the matching points.
0 20 40 60 80 100-0.5
0
0.5
1
1.5
2
2.5 x 107R
espo
nse
[mV
/m]
Obesr. points number
80 mm UXO60 mm UXO40 mm UXO
Figure 5. GSEA amplitudes for 80-mm, 60-mm, and 40-mm UXO.
Finally, to demonstrate the applicability of the GSEA as a discriminator we invert for the amplitudes of the responding GSEA sources for 40-mm, 60-mm and 80-mm UXO using TD data. The amplitudes for all pmn modes at the first time channel are depicted on Figure 5. This result demonstrates that the inverted amplitudes are correlated with object size, which indicates that the spatial distribution of GSEA amplitudes can potentially discriminate between objects of interest and non-hazardous targets.
7. CONCLUSION
In this paper we have presented a new approach that combines the GSEA and mixed modeling to predict EMI responses of buried objects. The accuracy of the combined technique was tested against data collected by the time-domain EM-63 sensor, but it is applicable to any type of time or frequency-domain EMI sensor. The mixed model signal processing algorithm is employed for estimating unsupervised regularization parameters from actual data using statistical methods. Similarly, the covariance matrix and confidence intervals for inverted model parameters are derived from a statistical point of view. The GSEA is a computationally intense and therefore relatively unattractive technique for inverting for the location and orientation of buried objects. However, after the location and orientation are determined using some other technique [22], the spatial distribution of GSEA dipole amplitudes could be used for accurate discrimination of UXO from non-UXO items. This approach will be considered in future work. Acknowledgment. This work was supported by the Strategic Environmental Research and Development Program, Projects MM-1572, and MM-1437.
Proc. of SPIE Vol. 6953 69531G-9

References
1. I.J. Won; D.A. Keiswetter; T.H. Bell, “Electromagnetic induction spectroscopy for clearing landmines,” IEEE
Trans. Geoscience and Remote Sensing, Vol. 39. No. 4., pp. 703–709, April 2001. 2. McNeill, J. D., and Bosnar, M., 1996. Application of Time Domain Electromagnetic Techniques to UXO
Detection. Proceedings of UXO Forum ’96. 3. D.M. Cargile, D.M., Bennett, H. H., Goodson, R. A., DeMoss, T. A., and Cespedes, E. R., 2004. Advanced uxo
detection/discrimination technology demonstration, kahoolawe, hawaii. Technical Report ERDC/EL TR-04-1, U.S. Army Engineer Research and Development Center. Department of Defense, 2003. Estcp cost and performance report (ux-0035): Geonics em63 multichannel EM data processing algorithms for target location and ordnance discrimination. Technical Report UX-0035, Environmental Security Technology Certification Program.
4. E. Gasperikova , “Berkeley UXO Discriminator (BUD) for UXO Detection and Discrimination, ”, SERDP and ESTCP's Partners in Environmental Technology Technical Symposium & Workshop, Washington, D.C. November 28-30, 2006.
5. Ben Barrowes, Kevin O’Neill, D.D. Snyder, D.C. George, and F. Shubitidze. “New man-portable vector time domain EMI sensor and discrimination processing”, UXO/Countermine Forum 2006, July 12, 2006. Las Vegas, NV.
6. L. R. Pasion and D. W. Oldenburg, “A discrimination algorithm for UXO using time domain electromagnetics”, Journal of Engineering and Environmental Geophysics, vol. 28, no. 2, pp. 91-102, 2001.
7. S.V. Chilaka, D.L. Faircloth, L.S. Riggs, H. H. Nelson, H.H.; “Enhanced discrimination among UXO-like targets using extremely low-frequency magnetic fields” IEEE Trans. Geosci. Remote Sens., vol. 44, no. 1, pp. 10–21, Jan. 2006.
8. S. Billings, “Practical Discrimination Strategies for Application to Live sites”, SERDP and ESTCP's Partners in Environmental Technology Technical Symposium & Workshop Washington, D.C. November 28-30, 2006.
9. N. Geng, K.E. Baum, L. Carin, “On the low frequency natural responses of conducting and permeable target,” IEEE Trans. Geoscience and Remote Sensing, vol. 37, pp. 347–359, 1999.
10. P. Gao, L. Collins, P. Garber, N. Geng, and L. Carin, “Classification of landmine-like metal targets using wideband electromagnetic induction,” IEEE Trans. Geoscience and Remote Sensing, vol. 38. no. 3., pp. 1352–1361, 2000.
11. T. H. Bell, B. J. Barrow, and J. T. Miller, “Subsurface discrimination using electromagnetic induction sensors”, IEEE Transactions on Geoscience and Remote Sensing, vol. 39 , no. 6, pp. 1286 – 1293, June 2001.
12. L. Carin, Yu Haitao; Y. Dalichaouch, A.R. Perry, P.V. Czipott, and C.E. Baum, “On the wideband EMI response of a rotationally symmetric permeable and conducting target,” IEEE Trans. Geoscience and Remote Sensing, Vol. 39, No. 6, pp. 1206–1213, 2001.
13. J.T. Miller, T. Bell, J. Soukup, and D. Keiswetter, “Simple phenomenological models for wideband frequency-domain electromagnetic induction,” IEEE Trans. Geoscience and Remote Sensing., Vol. 39. No. 6., pp. 1294–1298, June 2001.
14. Y. Zhang, L. Collins, H. Yu, C. Baum, and L. Carin, “Sensing of unexploded ordnance with magnetometer and induction: theory and signal processing,” IEEE Trans. Geoscience and Remote Sensing, Vol. 41, No. 5, pp. 1005–1015, May 2003.
15. X. Chen, K. O’Neill, B. E. Barrowes, T. M. Grzegorczyk, and J. A. Kong, “Application of a spheroidal-mode approach and a differential evolution algorithm for inversion of magneto-quasistatic data in UXO discrimination,” Inv. Prob., vol. 20, no. 6, pp. S27–S40, Dec. 2004.
16. F. Shubitidze, K. O’Neill, B. Barrows, J. P. Fernández, I. Shamatava, K. Sun, and K. D. Paulsen, “Application of the normalized surface magnetic charge model to UXO discrimination in cases with overlapping signals”, Journal of Applied Geophysics, vol. 61, pp. 292–303, 2007.
17. F. Shubitidze, O’Neill, K., I. Shamatava, K. Sun, and K.D. Paulsen, “Analysis of EMI scattering to support UXO discrimination: Heterogeneous and multi objects,” In Proc. of SPIE “Detection and Remediation Technologies for Mines and Mine Like Targets,” Orlando, Florida USA, pp. 928–939, April 21–25, 2003.
18. K. Sun, K. O’Neill, F. Shubitidze, I. Shamatava, and K. D. Paulsen, “Fast data-derived fundamental spheroidal excitation models with application to UXO discrimination,” IEEE Trans. Geosci. Remote Sens., vol. 43, no. 11, pp. 2573–2583, Nov. 2005.
Proc. of SPIE Vol. 6953 69531G-10

19. F. Shubitidze, K. O’Neill, I. Shamatava, K. Sun, and K. D. Paulsen, “A fast and accurate representation of physically complete EMI response by a heterogeneous object,” IEEE Trans. Geosci. Remote Sens., vol. 43, no. 8, pp. 1736–1750, Aug. 2005.
20. F. Shubitidze, B. E. Barrowes, I. Shamatava, J. P. Fernández, and K. O’Neill, “Data derived generalized SEA applied to MPV TD data“, Submitted, The 24th International Review of Progress in Applied Computational Electromagnetics (ACES 2008) March 30 – April 4, 2008, Niagara Falls, Canada.
21. F. Shubitidze, I. Shamatava, A. Bijamov, E. Demidenko “Combining dipole and mixed models approaches for UXO discrimination”, SPIE-2008, Orlando Florida, March 16-21, 2008.
22. F. Shubitidze, D. Karkashadze, B. Barrowes, I. Shamatava, K. O’Neill: “A new physics based approach for estimating a buried object's location, orientation and magnetic polarization from EMI data”, Journal of Environmental and Engineering Geophysics, Sept. 2008. Accepted.
23. E. Demidenko, Mixed Models: Theory and Applications, Wiley, New York, 2004, pp. 704. 24. G.A.F. Seber and C.J. Wild, Nonlinear Regression. New York: Wiley, 1989. 25. G. H. Golub, M. Heath, and G. Wahba, “Generalized cross validation as a method for choosing a good ridge
parameter”, Technometrics, vol. 21, pp. 215– 223, 1979. 26. D. Calvetti, S. Morigi, L. Reichel, and F. Sgallari, “Tikhonov regularization and the L-curve for large discrete
ill-posed problems”, J. Comput. Appl. Math., vol. 123, pp. 423–446, 2000. 27. D.R. Cox and D.V. Hinkley, Theoretical Statistics, London, Chapman and Hall, 1990.
Proc. of SPIE Vol. 6953 69531G-11




















