The DiY Smart Experiences Project
11
This content has been downloaded from IOPscience. Please scroll down to see the full text. Download details: IP Address: 138.4.40.47 This content was downloaded on 17/01/2014 at 14:45 Please note that terms and conditions apply. Pervasive surveillance-agent system based on wireless sensor networks: design and deployment View the table of contents for this issue, or go to the journal homepage for more 2010 Meas. Sci. Technol. 21 124005 (http://iopscience.iop.org/0957-0233/21/12/124005) Home Search Collections Journals About Contact us My IOPscience
-
Upload
esaartscience -
Category
Documents
-
view
4 -
download
0
Transcript of The DiY Smart Experiences Project

This content has been downloaded from IOPscience Please scroll down to see the full text
Download details
IP Address 13844047
This content was downloaded on 17012014 at 1445
Please note that terms and conditions apply
Pervasive surveillance-agent system based on wireless sensor networks design and
deployment
View the table of contents for this issue or go to the journal homepage for more
2010 Meas Sci Technol 21 124005
(httpiopscienceioporg0957-02332112124005)
Home Search Collections Journals About Contact us My IOPscience
IOP PUBLISHING MEASUREMENT SCIENCE AND TECHNOLOGY
Meas Sci Technol 21 (2010) 124005 (10pp) doi1010880957-02332112124005
Pervasive surveillance-agent system basedon wireless sensor networks design anddeploymentJose F Martınez Sury Bravo Ana B Garcıa Ivan CorredorMiguel S Familiar Lourdes Lopez Vicente Hernandez andAntonio Da Silva
Departamento de Ingenierıa y Arquitecturas Telematicas DIATEL Universidad Politecnica de MadridEUIT Telecomunicacion Ctra Valencia Km 7 CP 28031 Madrid Spain
E-mail jfmartindiatelupmes sbravodiatelupmes abgarciadiatelupmesicorredordiatelupmes msfamiliardiatelupmes llopezdiatelupmes vhernandezdiatelupmesand adasilvadiatelupmes
Received 24 March 2010 in final form 9 September 2010Published 29 October 2010Online at stacksioporgMST21124005
AbstractNowadays proliferation of embedded systems is enhancing the possibilities of gatheringinformation by using wireless sensor networks (WSNs) Flexibility and ease of installationmake these kinds of pervasive networks suitable for security and surveillance environmentsMoreover the risk for humans to be exposed to these functions is minimized when using thesenetworks In this paper a virtual perimeter surveillance agent which has been designed todetect any person crossing an invisible barrier around a marked perimeter and send an alarmnotification to the security staff is presented This agent works in a state of lsquolow powerconsumptionrsquo until there is a crossing on the perimeter In our approach the lsquointelligencersquo ofthe agent has been distributed by using mobile nodes in order to discern the cause of the eventof presence This feature contributes to saving both processing resources and powerconsumption since the required code that detects presence is the only system installed Theresearch work described in this paper illustrates our experience in the development of asurveillance system using WNSs for a practical application as well as its evaluation inreal-world deployments This mechanism plays an important role in providing confidence inensuring safety to our environment
Keywords pervasive surveillance agent ubiquitous security system wireless sensor network
(Some figures in this article are in colour only in the electronic version)
1 Introduction
Wireless sensor networks (WSNs) are ubiquitous networkswhich are made up of tiny sensor devices called sensornodes These pervasive devices are capable of monitoringand processing data with wireless communication supportThey also come with independent decision-making featuresthat respond to sensor measurements and to the informationthat is shared among them A WSN is a powerful and flexibletool that allows monitoring complex environments where datamonitoring by other methods is not possible Nowadays
the proliferation of embedded systems is enhancing thepossibilities of gathering information by using WSNs Theyare used in a great number of applications such as surveillanceand security environmental monitoring health applicationssmart space industrial control and automotive [1] amongothers
Regarding pervasive surveillance and security WSNsreduce risk to humans who are exposed to these functionsand reduce the work force needed in such environmentsImplementation time and deployment of security systemsbased on WSNs are some other interesting issues to be
0957-023310124005+10$3000 1 copy 2010 IOP Publishing Ltd Printed in the UK amp the USA
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
taken into account Regarding this topic Garcıa [2] claimsthat the sensor networks allow security system designers toquickly and easily place individual sensorcommunicationOn the other handother advantages of WSNs when applied topublic buildings such as saving cost in the wiring installationand having ubiquitous connection are mentioned in [3]They are unobtrusive and also require less maintenanceHowever WSNs have limited power supply computationalcapacities memory and short-range radio communicationfeatures Thereby WSN-based surveillance systems have to bedesigned taking into account some trade-offs between lsquosystemgoalsrsquo and efficient use of hardware resources
In this research paper a virtual perimeter surveillanceagent (vpSA) is proposed It implements mobile nodesmanagement based on a reactive agentrsquos model The agentrsquosmain goal is to deal with the detection of objects that crossan invisible barrier around a given perimeter of the VersmeSanatorium in Birstonas (Lithuania) The agent deployedin the perimeter nodes analyses the data received from theenvironment when the virtual perimeter is crossed discerningpatients assistant staff (authorized access) and intruders(unauthorized access) It consequently sends an alarmnotification to the security staff Thus our agent perceivesa situation occurred in the environment and makes a decisionon that perception A vpSA approach has been developedas a reactive agent that does not have any internal symbolicmodels of its environment It acts as a stimulusresponse typeof behaviour by responding to the current security perimeterestablished by the fixed nodes In order to improve networkautonomy which is one of the major challenges in WSNs alow power consumption mode has been designed In orderto achieve low power consumption the agent is scheduled ina sleep mode during its normal operation When the virtualperimeter is crossed the agent passes to a lsquowake-up statersquo inorder to carry out required decisions
Other parts of this paper have been organized as followssection 2 explains the related work focused on developingsurveillance solutions using WSNs Section 3 describesthe theoretical foundations of our proposal in detail thatinclude system specifications and pervasive agent features andproperties Section 4 explains the experience observed in thedeployment of the surveillance agent in the real environmentSection 5 shows validation results of the agent as well as someinteresting notes based on our field deployment experiencesFinally concluding remarks and future research lines areanalysed in section 6
2 Related work
A reactive agent acts using a stimulusresponse type ofbehaviour hence it does not have any internal symbolicmodels of the environment and acts according to the resultof stimulus generated within [4] WSNs are defined by a set ofagents connected to each other by communication interfaces[5] These kinds of ubiquitous networks interact with theirenvironment by means of
bull actions exerted by the environmentbull external states emitted to the environment
According to the previous study each agent of the WSNcan be defined as a reactive decisional agent that cooperateswith other network operators in order to achieve a specificobjective In the literature [6ndash8] several proposals to modelthe WSN as heterogeneous agent systems are presented
Byunghun et al [9] propose a surveillance system using apassive infrared (PIR) sensor to detect movement in a homeoffice or factory First it analyses the use of PIR sensors bysecurity systems proposing a region-based human trackingalgorithm This algorithm is based on PIR sensors to know theregion where an object is located They model the detectionregion of the PIR sensors based on location coordinatespread angle detection range and constant radius (maximumdetection distance) of the PIR sensor In this manner they setthe detection area accurately and show how to deploy the PIRsensors so as to detect human movement However detectionis highly dependent on the sensor deployment Furthermorethis mechanism has only been tested to detect one person at atime
Li and Parken [10] propose an anomaly detection systemby using WSNs and mobile robots The architecture proposesa cluster topology Each cluster has a cluster head and multiplecluster members Each cluster covers a geometric regionand is responsible for detecting the environmental changesin that region The sensor network uses a fuzzy adaptiveresonance theory (ART) neural network to detect intrudersThe system detects time-related changes by using the Markovmodel First the sensor network learns what conditions ofan environment are lsquonormalrsquo and then compares the currentenvironment conditions with the reference model in order todetect environmental changes
When a change is detected the WSN determines thatconditions of the environment do not match the referencemodel It informs the mobile robot about such a situation therobot then displaces to the area to verify whether the reportedevent is related to an intruder Intrusion detection in WSNsprovides higher flexibility due to the collaboration of robots inreaching places and performing tasks that cannot be performedby fixed nodes
Zappi et al [11] propose a technique that detects humanswho cross through a door or gate In this approach four sensornodes are used three of them are equipped with infraredsensors that sample the output of the PIR detector and identifythe number of peak pairs and the direction of the first peakThe fourth node sensor receives all information and infers thenumber of people and direction of movement The numberof persons is extracted by means of the number of peaksdetected by each node and duration of the second peak whichis measured by the central node The direction of movementis detected by looking at the indication of the three sensorsThe most important limitations of this system are its highdependence on network topology and set-up of PIR sensors
According to the literature described in this section itis concluded that WSNs are widely used in tracking eventsor objects (eg building monitoring and control industrialprocess control and energy monitoring) by means of theirwireless communication capabilities their easy interactionwith other external networks and their tiny sizes that allow
2
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Table 1 Characteristics of the Luminite TX50040 PIR detector
Items Datasheet
Detection distance 40 mField of view 1
Supply voltage 9 V from PP3Consumption in stand-by mode 9 μATemperature range minus10 + 50 C
them to integrate with the environment easily However noprevious works using an intruder detection system throughcooperation with mobile sensor nodes have ever been appliedAs far as is known there are no companies providing this typeof application Otherwise specialized companies (CrossbowTechnologies1 Sentilla2 Libelium3) offering hardware fordesigning and deploying similar kinds of applications wouldbe offering such systems
3 Specification of the surveillance agent
This section describes the mechanism used by the vpSA forthe detection of intruders as well as its architectonic andfunctional description Moreover the selected middleware thatallows deployment of the agent and provides basic servicessuch as communication support is outlined
Presence detection mechanisms are used in cases where aperimeter has not been physically defined or when a perimeteris not visible to people for security reasons Thus presencedetection systems generate an invisible barrier around theperimeter and perform actions when the perimeter is alteredin order to prevent intrusions In the following section thefeatures of the sensors used for detecting intrusions at theperimeter are described
31 Characterization of passive infrared sensors
PIR sensors are pyroelectric devices They can be used fordetecting movements by means of changes in temperatureemitted by objects inside the marked area Treatment ofPIR sensor data is simpler than those implemented by amicrophone ultrasound or other visual means and contrastThey do not require any device or object detection signalPIR sensors have proven performance and are inexpensiveand easy to integrate with other systems [12] Thus they arewidely applied in alarm systems lighting controlled by motionand robotics applications such as intrusion detection [13]
For this study a Luminite TX50040 passive infraredsensor has been used4 This provides a detection range ofup to 40 times 1 (see table 1) The TX50040 PIR sensor is forlong-range narrow applications being suitable for perimeterprotection A 9 V lithium PP3 battery powers this PIR
1 Crossbow Corporation Inc (available at httpwwwxbowcom)2 Sentilla Corporation (available at httpwwwsentillacom)3 Libelium Comunicaciones Distribuidas SL (available athttpwwwlibeliumcom)4 Luminite Electronics Ltd (available at httpwwwluminitecoukproductpagephpWEBYEP DI=301)
32 Middleware
As was presented in previous sections the vpSA approachis based on agent paradigm This technology requires spacefor interpretation storage and control commonly known aslsquoagent platformrsquo Agent platforms are standardized by theFoundation for Intelligent Physical Agents (FIPA)5 Thisplatform provides different services such as communicationamong agents reactivity and behaviour In order to providesupport for deployment of the agent in the sensor nodeslightweight software has been used in order to provideabstraction from the underlying sensor platform heterogeneityand communication at a network level by means of anapplication programming interface (API) In this manner aμSMS (micro subscription management system) middlewareapproach has been developed in the framework of the μSWNResearch Project6
The main reason for using μSMS middleware abstractionis its ease for providing deployment of agent-basedservices over resource-constraint devices Among thesefeatures we can emphasize the development of lightweightcomponent-based services as well as the event-drivenpublishsubscribe communication paradigm On the onehand the publishsubscribe interaction model is widelyapplied in WSNs because it offers an asynchronous interactionmodel between components The components are notifiedwhen an event of interest is generated without havingto continuously poll the data source This enhances thedecoupling between information producers and consumerswhile minimizing energy consumption [14] Moreover thisarchitecture uses the middleware components paradigm forservice creation The use of these components offers severaladvantages to software engineering These advantages includeindependence (low coupling between architecture pieces)interoperability (by means of well-specified service interfacecontract) and reusability (business logic of the componentsis properly encapsulated) Considering μSMS proposal theinterface of each component is very compact That meansthe minimum required methods for controlling the lifecycle ofeach component (see section 33) and the minimum to interactwith the rest of the architecture by using an underlying event-based model have been defined This allows the frameworksubsystem to schedule the components in a low-consumptionmode in order to increase the autonomy of the sensor nodes
At this point μSMS architecture can be seen as a multi-agent platform for enriched service composition on WSNsThis middleware approach provides support for the exchangeof information between sensor nodes in a lightweight mannerwhich is a cornerstone in embedded computing devices suchas WSN6 Figure 1 illustrates the core components diagramof the architecture where the vpSA is deployed
The description of the main elements of the μSMSarchitecture is as follows
Resources This middleware component is responsiblefor controlling hardware resources of the nodes Its main
5 Foundation for Intelligent Physical Agents (available athttpwwwfipaorgspecsfipa00023indexhtml)6 μSWN Solving Major Problems in Micro Sensorial Networks (IST-034642) European FP6 Project Site wwwuswneujindexphp
3
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 1 Overview of the μSMS middleware architecture
functions include management of timers LEDs DAC(digital to analogue converter) ADC (analogue to digitalconverter) GPIO (general purpose IO) and batteriesamong othersSubscriber This middleware component represents thekernel of the publishsubscribe system It providespublication and subscription capabilities to the rest ofthe components in the architecture In this manner thesubscriber allows the application agents to exchange datawith the agents deployed in the rest of the network nodesthrough eventing serviceCommunication This middleware component isresponsible for sending and receiving data events in thesensor network It uses the services offered by the NPL(network protocol layer) subsystem offering the rest ofthe architecture a well-defined interface to support theinter-node communicationFramework This middleware subsystem is responsiblefor managing the lifecycle of the component and agentsin the nodes The main task of the framework subsystemis the execution scheduling of the components that areinstantiated in the nodesHardware abstraction layer (HAL) This subsystemallows taking advantage of the resources of the sensornodes by isolating the application agents from theunderlying hardware heterogeneity Thus using theservices offered by HAL the resources componentprovides a uniform interface to access the physical nodecapabilitiesNetwork protocol layer (NPL) This subsystem encapsu-lates the low-level radio communication protocols Itsobjective is to decouple the middleware of the specificused routing scheme features using a stratified approachCommunication component wraps in order to provide acommon interface with independence from the specific
implementation applied in the NPL The following sub-sections explain the technical details of the physical MACand routing protocol layers that have been used
321 Physical and MAC layers This approach is based onIEEE Std 802154-2006 which specifies a standard protocolstack widely used in a low-rate wireless personal area network(LR-WPAN) IEEE 802154 protocol stack defines a physical(PHY) layer and a medium access control (MAC) layer ThePHY layer operates at 868 MHz (11 radio channels 20 kbps)915 MHz (11 radio channels 40 kbps) and 24 GHz (16radio channels 250 kbps) frequency bands with a wirelesstransmission range up to 100 m The IEEE 802154 MAClayer uses a CSMA-CA (carrier sense multiple access-collisionavoidance) algorithm to detect and avoid collisions in a sharedtransmission medium offering a guaranteed time slot (GTS) asthe optional mechanism This feature is focused on allocating aspecific duration within a superframe structure in order to offerlow latency for user applications with real-time requirements
322 Routing protocol ZigBee specification 2006networking technology has been considered in this approachIt is an IEEE 802154-based protocol stack aiming to achievelow cost and low power consumption in resource constraintand embedded devices This standard defines over anIEEE 802154 MAC layer a network (NWK) layer and anapplication support (APS) layer The NWK layer implementsthe routing protocol which offers multi-hop communicationsupport for several networking topologies including starcluster tree and mesh the latest has been used in our WSNdeployment Moreover confidentiality service is provided bythis routing scheme using 128 bits symmetric cryptographyfor the advanced encryption service (AES) protocol TheAPS layer is over NWK in order to offer a set of generalfunctionalities such as services of binding and discovery
33 Agent properties
The most important properties of the proposed vpSA are asfollows
Agent status It describes the necessary information todistinguish between two agents of the same type Thestate is mainly affected by the agent inputs which aredata acquired by the sensors and information from otheragentsAgent behaviour It defines the agentrsquos ability to react to aspecific execution condition based on the perception andaction taken previously Thus the agent makes decisionsaccording to the event detected by the sensorsCommunication capabilities vpSA has interactioncapabilities among nodes through the agent middlewareplatform provided by the μSMS abstraction Aspreviously mentioned it offers agents support to interactwith other actors through publishsubscribe paradigmusing an event-driven communication modelAutonomy vpSA performs its task without interventionfrom humans or other agents through orders andorqueries The agent is interested in a specific event
4
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
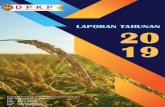
Figure 2 State diagram of the fixed nodes
so when this event occurs the agent executes thecorresponding action This procedure implies thatagents running on the mobile node wake up from alow power consumption mode and consequently performcorresponding functions automaticallyCommon objectives Both in the fixed and mobile nodesagents perform a set of specific tasks They interact toachieve common lsquodetecting presencersquo goalLifecycle The agent has capacity of being lsquobornrsquo when itis developed and activated to lsquoliversquo while it is operationalto lsquoclonersquo itself by distributing its knowledge over mobilenodes in order to fulfil its main objective and to lsquodiersquowhen it is unloaded from the node
34 Surveillance agent roles
Agents have been installed in two types of sensor nodes lsquofixednodesrsquo and lsquomobile nodesrsquo Fixed nodes are used for makingthe virtual perimeter and lsquomobile nodesrsquo are used for detectingclients and assistant staff The main agent functionalities inthese nodes are as follows
341 Fixed nodes The virtual perimeter is made up of fixednodes These nodes are equipped with PIR sensors which candetect any motion from people crossing the perimeter Thefixed nodes distinguish clients assistant staff and intrudersThis information is then sent to the sink node and fromthere to the security staff of the sanatorium via WiFi Allthe collected information is stored in a database
342 Mobile nodes The clients and assistant staff areequipped with this kind of node The nodes send a signalidentifying themselves when a fixed node of the virtualperimeter makes a request They have a business logic thatallows collaborating with the fixed nodes to discern the typeof intrusion (ie authorized or unauthorized)
35 Surveillance agent functions
The main design goals of the vpSA are as follows
bull Detection of access to the perimeter of clients identifyingsanatorium staff or intruders passing through the area
bull Alarm indication directed to sanatorium securitypersonnel reporting that an unauthorized person hascrossed the perimeter
351 Agent functions in the fixed nodes As shown infigure 2 vpSA located in the fixed nodes remains in a lowpower consumption mode until the virtual perimeter is crossedOnce the agent receives an lsquoaltered infrared sensorrsquo eventthe identification of its neighbours will be requested Ifthere are mobile nodes in this area they have to respondwith their identification to the fixed node so it can informbracelet identification to the security personnel and determinethe lsquobracelet presencersquo event Otherwise if an intruder hasaltered the perimeter the fixed node will process an alarmof lsquointruder presencersquo and inform the security staff Theperiod of time between the request for identification and itscorresponding response depends mainly on the time requiredbetween the sensor nodes (fixed and mobile) to communicateand exchange such events In any case the time is not morethan 3 s for the fixed nodes and 2 s for the mobile nodes
352 Agent functions in the mobile nodes The vpSAlocated in the mobile nodes remains in a low powerconsumption mode until an identification request event isreceived from the fixed node (perimeter node) Once theagent receives a lsquorequest identificationrsquo event it responds tothe perimeter node that has requested for it The time thattranspires is not more than 2 s The agent then returns to thelow-consumption mode
4 Implementation details
The vpSA has been deployed at the Versme Sanatorium inBirstonas (Lithuania) Two different types of nodes have beeninstalled fixed nodes that make up the virtual perimeter andmobile nodes (bracelets) that are worn by sanatorium patientsand authorized staff Messages are interchanged when thevirtual perimeter is crossed both by a bracelet or an intruder
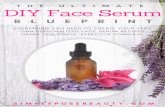
Figure 3 shows the vpSA deployed in fixed nodes aspreviously subscribed to lsquoALTERED INFRARED SENSORrsquoevents This kind of event will be thrown by the Resources
5
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 3 Surveillance scenario lsquobracelet detectionrsquo use case
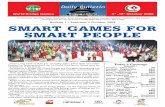
Figure 4 Surveillance scenario lsquointruder detectionrsquo use case
component of the μSMS middleware when the PIR sensor isexcited When a presence is detected the fixed node connectedto the PIR sensor generates a lsquoNODEID REQUESTrsquo externalpublication which will be delivered to the neighbouring nodesvia broadcast communication The bracelet node that crossesthe perimeter has to reply with a lsquoNODEID RESPONSErsquoexternal publication the fixed node will wait for the answerfrom the bracelet node for a short period of time (3 s) If thelsquoNODEID RESPONSErsquo event is received from the braceletnode the fixed mote will throw a lsquoBRACELET PRESENCErsquoevent containing the identification of the bracelet node thathas generated the presence in the perimeter Otherwise inthe case of intruder detection an lsquoINTRUDER PRESENCErsquoevent will be generated (see figure 4)
5 Validation scenario
In order to validate our approach in the real-worldenvironment a surveillance perimeter has been deployed atthe Versme Sanatorium in Birstonas (Lithuania) as shown infigure 5 This sanatorium is an establishment for specializedtreatment and recreation providing rehabilitation supportrehabilitation ambulatory rehabilitation and sanatoriumtreatment services
A WSN has been deployed using fixed nodes to markthe virtual perimeter on the external part of the sanatoriumwhich is 810 m long In order to enable the mechanism ofidentification in the fixed nodes a bracelet (mobile node) isassigned to every patient and assistant staff at the sanatorium
6
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 5 Virtual perimeter in sanatorium
During the evaluation 14 patients each wearing a braceletwere supervized by 5 assistant staff The bracelets are madeof Crossbow TelosB nodes (so-called motes) that integrateadditional biomedical sensors in order to spread their capacityof sensing data such as heart rate body temperature andhumidity In some particular cases the sanatorium staff willuse a PDA to receive presence events from the perimeterWhen an intruder is detected inside the perimeter the fixednode alerts the security staff by reporting the type of intrusionwhich could have been generated by a client or by an intruderThe personnel will then have to confirm the event and makedecision accordingly The data about the event are saved in adatabase for further analysis and consultation
Figure 5 shows the fixed nodes deployed around thesanatorium perimeter represented by dots They containPIR sensors which are used to detect the presence of peoplecrossing the perimeter
The virtual perimeter is made up of 50 TelosB mote sensorplatforms and used as implementation target Because ofproject cost constraints a sub-perimeter has been selected inorder to deploy the validation scenario Only 16 nodes from50 needed to cover the complete perimeter were used In thenext stage of the project the perimeter will be completelycovered by deploying 34 more nodes In the TelosB platforma sensor board can be plugged into each sensor node (mote)in order to carry out several environment readings includinglight temperature humidity infrared etc The deployedTelosB runs on two AA batteries with a lifespan thatdepends on communication use and computation resourcesCommunications within a 75ndash100 m outdoor range varygreatly under environmental conditions as can be observedin the datasheet The motes run the TinyOS operating systemsand are equipped with 48 kB of flash memory and 10 kB ofRAM memory IEEE 802154-compliant radio Moreover
these nodes are equipped with infrared sensors (LUMINITETX50040)
51 Deployment requirements
In the preliminary tests it was identified that the same physicalevent was detected by two or more nodes generating alarmsin places where incursions were not carried out This was dueto the overlapping of motes coverage ratio inside the detectionarea In other words two motes shared part of their detectionarea
Hence it was also determined that the deployment of fixednodes considers the intersection range of the infrared sensorsThis intersection area just involves two consecutive fixed nodesthat take part of the surveillance perimeter Thus it has beenguaranteed that the bracelet will only respond to those fixednodes involved in the sector where it has crossed It therebyreduces false alarms Two major requirements are necessaryin order to enable a proper detection of people wearingbracelets the two nodes involved in a perimeter sector haveto be deployed within the maximum PIR detection distancebetween them (40 m) and their PIRs must be accuratelybrought face to face This ideal scenario is illustrated infigure 6
As a validation requirement multi-hop radio configura-tion has been validated Network deployment was designedso as not to exceed five hops between sensor nodes and sinknode In order to set this scenario up both physical locationof sensor nodes and strength of their radio signal were takeninto account
52 Validation results
It took a period of 8 days to carry out the tests During thistime both intrusion and authorized (identified by bracelets)incursions through the perimeter were generated Figure 7illustrates the alarm generated on the application of the securitystaff once the perimeter has been violated The WSN-CAD surveillance application graphically shows two kindsof perimeter crossings performed by a bracelet (authorizedaccess) and intruder
In this period the energy consumption of the hardwarecomponents making up the virtual perimeter surveillance hasbeen determined
This study was focused on calculating the autonomy of oursurveillance system paying special attention to the perimeternodes since replacing their batteries is a bit difficult they areusually hung from lampposts or similar places that are noteasily accessible Such a problem for mobile nodes does notoccur since they are completely accessible to users
As previously mentioned TelosB motes and LuminiteTX50040 PIRs are the two main hardware components of theperimeter nodes Luminite TX50040 PIRs are connected toTelosB motes through their GPIO pins Each of those hardwareelements has its own energetic characteristics (see tables 2and 3) so consumption calculations have to be performedindependently
In order to calculate the autonomy of both TelosB moteand Luminite TX500 PIR according to the generated events
7
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 6 PIR sensor deployment conditions
Figure 7 WSN-CAD surveillance application
Table 2 Consumption of hardware execution modes
Hardware Execution Currentcomponent mode consumption
TelosB mote Tx mode (0 dBm) 253 mARx mode 23 mAIdle mode 21 μA
Luminite Stand-by mode 9 μATX50040 PIR Alarm mode 20 mA
of presence during validation (see table 4) let us considera balanced distribution of those events of presence betweennodes that make up the virtual perimeter In this manner 42events of presence are counted in total (per day and node)of which 13 events are of INTRUDER PRESENCE and 29events are of BRACELET PRESENCE
Table 3 Battery supply for hardware components
Hardwarecomponent Battery Battery features
TelosB mote 4xAA (redesignedmotes)
Lithium rechargeable15 V 2900 mAh
LuminiteTX50040 PIR
1xPP3 Lithium 9 V 230 mAh
Table 4 System validation results
Use case
Classification Bracelet Intruder
True positive (tp) 4277 1125False positive (fp) 17 8False negative (fn) 0 0
521 Luminite TX50040 PIR autonomy analysis Whena Luminite TX50040 PIR is excited because of a perimetercrossing the PIR hardware turns from lsquostand byrsquo mode tolsquoalarmrsquo mode The lsquoalarm modersquo of Luminite TX50040 PIRactivates for 3 s every time it is excited The PIR therebyworks in that mode almost 1 min per day consuming 092 mAhaccording to energy data shown in tables 2 and 3 Thereforethe Luminite TX50040 PIR can autonomously work for 251days it is equivalent to detecting approximately 10 542 eventsof presence
522 TelosB mote autonomy analysis Every time fixednodes process an event of presence TelosB motes needto send two messages via radio (see figure 2) first aNODEID REQUEST publication and second a PRESENCEevent to identify the kind of detected presence Eventually ifa NODEID RESPONSE event is received from a braceletthen a BRACELET PRESENCE event is thrown to thegateway otherwise an INTRUDER PRESENCE event isthrown The node has to switch the RF transceiver onfor 8 ms in order to transmit the two necessary messages(NODEID REQUEST and PRESENCE event) and 43 ms
8
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
to receive a NODEID RESPONSE event if needed Takinginto account the TelosB mote energy characteristics as shownin tables 2 and 3 the mote consumption is 4371 mAhper day Originally TelosB mote was equipped with 2AA batteries but fixed TelosB motes were redesigned inorder to increase their autonomy by enabling two more AAbatteries From the consumption per day previously obtainedfixed TelosB motes making up the virtual perimeter canthereby autonomously work for 265 days this is equivalentto transmitting approximately 11 130 events of presence
53 Performance evaluation
In this section experimental results that evaluate theperformance of the surveillance-agent system based on WSNsdescribed in the previous section are presented
Table 4 shows the results obtained during systemvalidation The results are classified into three categoriesThe first set of results true positive (tp) refers to those eventsproperly discerned by the node indicating who crossed theperimeter During the validation test 4277 bracelets and 1125intruders were detected as true positive (ie bracelet nodes andintruders respectively)
The second set of results false positive (fp) indicates that(1) 17 bracelet accesses were detected as intruder and (2) 8intruder accesses were detected as bracelet In the case of (1)it has been concluded that the false positive was caused by adeficient radio signal of either fixed node or of the bracelet(eg reflections attenuations and interferences) which didnot allow proper communication among bracelets and fixednodes It is then not possible to exchange messages thatallow identification of the mobile node In order to avoidthis situation the characteristics of deployment in order tooptimize the performance of the PIRs have been modified Inthe case of (2) false positive was due to an intruder crossingthe perimeter when there was a bracelet in the radio coveragearea of the fixed node
Finally false negative (fn) represents those events ofpresence that occurred inside the perimeter and that were notdetected by the node False negative was 0 as in all casesan alarm was generated when the perimeter was crossed byeither an intruder or a bracelet
According to the data shown in table 4 the performancemetrics defined in [15] have been adapted in order to determineboth precision and recall of the system
In the context of this work precision indicates thepercentage of detections properly classified from the totaldetections Specifically precision is the number of truepositives divided by the total number of elements labelledas belonging to the positive class Thus precision is obtainedby applying (1) that corresponds to 99 which indicates thatthe system has a high degree of precision This rate has beenachieved through collaborating fixed nodes with mobile nodes
precision = tp
tp + fp (1)
Regarding recall it indicates the number of eventscorrectly detected from those that should have been detectedHence the number of detected events of presence from the total
occurred presence has been obtained by applying expression(2) which corresponds to 1 That has been so due todeployment as explained in section 51 that allowed notonly the detection of every unauthorized crossing which isthe major goal of our surveillance-agent system but also thedetection of every perimeter intrusion from authorized staffand patient crossings
recall = tp
tp + f n (2)
54 Lessons learned
The work described in this paper is our experience with apervasive surveillance agent based on WSNs in a practicalapplication and its evaluation through an actual deploymentof motes Several lessons have been learnt from the workperformed in this research which can be applied to makingdecisions during the development of a system related topervasive surveillance The following points are someremarks that could be useful to future researchers involvedin the development and management of pervasive surveillancesystems based on WSNs
bull The sensors for deployment have to be chosen consideringthe characteristics of coverage to be modelled
bull The geographical factors of the place that will bemonitored for the detection of intrusions have to be takeninto account
bull The number of required sensors has to be calculatedin order to guarantee the expected security level fromthe sensed spatial density and the critical level of themonitored area
bull The set of information which is extracted from datathat is generated by the agent allows determiningthe weaknesses of the coverage area and discoveringvulnerabilities for hypothetical intrusion paths
6 Conclusions and future research
The work described in this paper has presented our experienceabout developing a surveillance system using WSNs forpractical applications and evaluating their deployment inthe real world A mechanism for controlling virtualperimeters using WSN that manage mobile nodes in a specificenvironment has been proposed A deployment mechanismhas been used in order to guarantee effective detection andan efficient use of motes which operate in a low powerconsumption mode in periods when events are not receivedIn addition the lsquointelligencersquo of the agent has been distributedby using mobile nodes to discern who has caused the eventof presence the client the sanatorium staff or the intruderMoreover our system has the capacity to detect more than oneauthorized person crossing the perimeter since the system isbased on intelligent distribution supported by mobile nodesThis characteristic contributes in saving both processingresources and power consumption
The deployment of this solution results in cost savingsbecause cables are not required during installation Therefore
9
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
this kind of deployment could become more spatially densethan traditional approaches Currently those mechanisms playan important role in building confidence in our environment toensure safety becoming key elements for preventing multipletypes of threats and allowing better quality of life for humans
As future research the manner how to integrate theagent in the formation of dynamic surveillance of virtualperimeters in runtime will be studied Advanced context-aware applications could be developed from this improvement(eg from livestock control to baggage logistics) It isa research challenge which could be solved by designingmulti-sensorial surveillance systems that combine differentdata sources from diverse positional sensors (eg ultrasonictransducer stereo vision laser triangulation)
Acknowledgments
The work presented in this research paper has been partiallyfunded by the VI Framework Programme of the EuropeanUnion within the μSWN lsquoSolving Major Problems in Microsensorial Wireless Networksrsquo project (code TSI-034642)The authors would like to thank the anonymous reviewersfor their valuable comments
References
[1] Garcıa-Hernandez C F Ibarguengoytia-Gonzalez P HGarcıa-Hernandez J and Perez-Dıaz J A 2007 Wirelesssensor networks and applications a survey Int J ComputSci Netw Secur 7 270
[2] Garcia M L 2008 Design and Evaluation of PhysicalProtection Systems (Portsmouth NHButterworth-Heinemann) pp 86ndash8
[3] Garcıa A B Martınez J F Lopez J M Prayati A and RedondoL 2008 Problem Solving for Wireless Sensor Networks(Computer Communications and Network Series)(London Springer) pp 177ndash207
[4] Bounabat B Romadi R and Labhalla S 1999 Designingmulti-agent reactive systems a specification method based
on reactive decisional agents Approaches to IntelligenceAgents (Berlin Springer) p 775
[5] Romadi R and Berbia H 2008 Wireless sensor network aspecification method based on reactive decisional agents3rd Int Conf on Information and CommunicationTechnologies From Theory to Applications (ICTTA 2008)pp 1ndash5
[6] Frantisek Z Jr and Frantisek Z 2008 Simulation for wirelesssensor networks with intelligent nodes 10th Int Conf onComputer Modeling and Simulation (UKSIM 2008)pp 746ndash51
[7] Wang X Bi D-W Ding L and Wang S 2007 Agentcollaborative target localization and classification WirelSensor Netw Sensors 7 1359ndash86
[8] Rogers A Corkill D D and Jennings N R 2009 Agenttechnologies for sensor networks Intell Syst IEEE24 13ndash7
[9] Byunghun S Haksoo Ch and Hyung S L 2008 Surveillancetracking system using passive infrared motion sensors inwireless sensor network Int Conf on InformationNetworking (ICOIN 2008) pp 1ndash5
[10] Li Y Y and Parker L 2008 Intruder detection using a wirelesssensor network with an intelligent mobile robot responseProc IEEE SoutheastCon (Huntsville AL USA) pp 37ndash42
[11] Zappi P Farella E and Benini L 2007 Enhancing the spatialresolution of presence detection in a PIR based wirelesssurveillance network IEEE Conf on Advanced Video andSignal Based Surveillance (AVSS 2007) pp 295ndash300
[12] Singh J Madhow U Kumar R Suri S and Cagley R 2007Tracking multiple targets using binary proximity sensorsProc 6th Int Conf on Information Processing in SensorNetworks (IPSN rsquo07) (Cambridge MA USA) (New YorkACM) pp 529ndash38
[13] Moghavvemi M and Lu Ch S 2004 Pyroelectric infraredsensor for intruder detection TENCON 2004 IEEE Region10 Conf vol 4 pp 656ndash9
[14] Boonma P and Suzuki J 2009 Toward interoperablepublishsubscribe communication between sensor networksand access networks IEEE Consumer Communications andNetworking Conf pp 1ndash6
[15] Yuan Y L and Parker L E 2008 Detecting and monitoringtime-related abnormal events using a wireless sensornetwork and mobile robot IEEE RSJ Int Conf onIntelligent Robots and Systems (IROS 2008) pp 3292ndash8
10

IOP PUBLISHING MEASUREMENT SCIENCE AND TECHNOLOGY
Meas Sci Technol 21 (2010) 124005 (10pp) doi1010880957-02332112124005
Pervasive surveillance-agent system basedon wireless sensor networks design anddeploymentJose F Martınez Sury Bravo Ana B Garcıa Ivan CorredorMiguel S Familiar Lourdes Lopez Vicente Hernandez andAntonio Da Silva
Departamento de Ingenierıa y Arquitecturas Telematicas DIATEL Universidad Politecnica de MadridEUIT Telecomunicacion Ctra Valencia Km 7 CP 28031 Madrid Spain
E-mail jfmartindiatelupmes sbravodiatelupmes abgarciadiatelupmesicorredordiatelupmes msfamiliardiatelupmes llopezdiatelupmes vhernandezdiatelupmesand adasilvadiatelupmes
Received 24 March 2010 in final form 9 September 2010Published 29 October 2010Online at stacksioporgMST21124005
AbstractNowadays proliferation of embedded systems is enhancing the possibilities of gatheringinformation by using wireless sensor networks (WSNs) Flexibility and ease of installationmake these kinds of pervasive networks suitable for security and surveillance environmentsMoreover the risk for humans to be exposed to these functions is minimized when using thesenetworks In this paper a virtual perimeter surveillance agent which has been designed todetect any person crossing an invisible barrier around a marked perimeter and send an alarmnotification to the security staff is presented This agent works in a state of lsquolow powerconsumptionrsquo until there is a crossing on the perimeter In our approach the lsquointelligencersquo ofthe agent has been distributed by using mobile nodes in order to discern the cause of the eventof presence This feature contributes to saving both processing resources and powerconsumption since the required code that detects presence is the only system installed Theresearch work described in this paper illustrates our experience in the development of asurveillance system using WNSs for a practical application as well as its evaluation inreal-world deployments This mechanism plays an important role in providing confidence inensuring safety to our environment
Keywords pervasive surveillance agent ubiquitous security system wireless sensor network
(Some figures in this article are in colour only in the electronic version)
1 Introduction
Wireless sensor networks (WSNs) are ubiquitous networkswhich are made up of tiny sensor devices called sensornodes These pervasive devices are capable of monitoringand processing data with wireless communication supportThey also come with independent decision-making featuresthat respond to sensor measurements and to the informationthat is shared among them A WSN is a powerful and flexibletool that allows monitoring complex environments where datamonitoring by other methods is not possible Nowadays
the proliferation of embedded systems is enhancing thepossibilities of gathering information by using WSNs Theyare used in a great number of applications such as surveillanceand security environmental monitoring health applicationssmart space industrial control and automotive [1] amongothers
Regarding pervasive surveillance and security WSNsreduce risk to humans who are exposed to these functionsand reduce the work force needed in such environmentsImplementation time and deployment of security systemsbased on WSNs are some other interesting issues to be
0957-023310124005+10$3000 1 copy 2010 IOP Publishing Ltd Printed in the UK amp the USA
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
taken into account Regarding this topic Garcıa [2] claimsthat the sensor networks allow security system designers toquickly and easily place individual sensorcommunicationOn the other handother advantages of WSNs when applied topublic buildings such as saving cost in the wiring installationand having ubiquitous connection are mentioned in [3]They are unobtrusive and also require less maintenanceHowever WSNs have limited power supply computationalcapacities memory and short-range radio communicationfeatures Thereby WSN-based surveillance systems have to bedesigned taking into account some trade-offs between lsquosystemgoalsrsquo and efficient use of hardware resources
In this research paper a virtual perimeter surveillanceagent (vpSA) is proposed It implements mobile nodesmanagement based on a reactive agentrsquos model The agentrsquosmain goal is to deal with the detection of objects that crossan invisible barrier around a given perimeter of the VersmeSanatorium in Birstonas (Lithuania) The agent deployedin the perimeter nodes analyses the data received from theenvironment when the virtual perimeter is crossed discerningpatients assistant staff (authorized access) and intruders(unauthorized access) It consequently sends an alarmnotification to the security staff Thus our agent perceivesa situation occurred in the environment and makes a decisionon that perception A vpSA approach has been developedas a reactive agent that does not have any internal symbolicmodels of its environment It acts as a stimulusresponse typeof behaviour by responding to the current security perimeterestablished by the fixed nodes In order to improve networkautonomy which is one of the major challenges in WSNs alow power consumption mode has been designed In orderto achieve low power consumption the agent is scheduled ina sleep mode during its normal operation When the virtualperimeter is crossed the agent passes to a lsquowake-up statersquo inorder to carry out required decisions
Other parts of this paper have been organized as followssection 2 explains the related work focused on developingsurveillance solutions using WSNs Section 3 describesthe theoretical foundations of our proposal in detail thatinclude system specifications and pervasive agent features andproperties Section 4 explains the experience observed in thedeployment of the surveillance agent in the real environmentSection 5 shows validation results of the agent as well as someinteresting notes based on our field deployment experiencesFinally concluding remarks and future research lines areanalysed in section 6
2 Related work
A reactive agent acts using a stimulusresponse type ofbehaviour hence it does not have any internal symbolicmodels of the environment and acts according to the resultof stimulus generated within [4] WSNs are defined by a set ofagents connected to each other by communication interfaces[5] These kinds of ubiquitous networks interact with theirenvironment by means of
bull actions exerted by the environmentbull external states emitted to the environment
According to the previous study each agent of the WSNcan be defined as a reactive decisional agent that cooperateswith other network operators in order to achieve a specificobjective In the literature [6ndash8] several proposals to modelthe WSN as heterogeneous agent systems are presented
Byunghun et al [9] propose a surveillance system using apassive infrared (PIR) sensor to detect movement in a homeoffice or factory First it analyses the use of PIR sensors bysecurity systems proposing a region-based human trackingalgorithm This algorithm is based on PIR sensors to know theregion where an object is located They model the detectionregion of the PIR sensors based on location coordinatespread angle detection range and constant radius (maximumdetection distance) of the PIR sensor In this manner they setthe detection area accurately and show how to deploy the PIRsensors so as to detect human movement However detectionis highly dependent on the sensor deployment Furthermorethis mechanism has only been tested to detect one person at atime
Li and Parken [10] propose an anomaly detection systemby using WSNs and mobile robots The architecture proposesa cluster topology Each cluster has a cluster head and multiplecluster members Each cluster covers a geometric regionand is responsible for detecting the environmental changesin that region The sensor network uses a fuzzy adaptiveresonance theory (ART) neural network to detect intrudersThe system detects time-related changes by using the Markovmodel First the sensor network learns what conditions ofan environment are lsquonormalrsquo and then compares the currentenvironment conditions with the reference model in order todetect environmental changes
When a change is detected the WSN determines thatconditions of the environment do not match the referencemodel It informs the mobile robot about such a situation therobot then displaces to the area to verify whether the reportedevent is related to an intruder Intrusion detection in WSNsprovides higher flexibility due to the collaboration of robots inreaching places and performing tasks that cannot be performedby fixed nodes
Zappi et al [11] propose a technique that detects humanswho cross through a door or gate In this approach four sensornodes are used three of them are equipped with infraredsensors that sample the output of the PIR detector and identifythe number of peak pairs and the direction of the first peakThe fourth node sensor receives all information and infers thenumber of people and direction of movement The numberof persons is extracted by means of the number of peaksdetected by each node and duration of the second peak whichis measured by the central node The direction of movementis detected by looking at the indication of the three sensorsThe most important limitations of this system are its highdependence on network topology and set-up of PIR sensors
According to the literature described in this section itis concluded that WSNs are widely used in tracking eventsor objects (eg building monitoring and control industrialprocess control and energy monitoring) by means of theirwireless communication capabilities their easy interactionwith other external networks and their tiny sizes that allow
2
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Table 1 Characteristics of the Luminite TX50040 PIR detector
Items Datasheet
Detection distance 40 mField of view 1
Supply voltage 9 V from PP3Consumption in stand-by mode 9 μATemperature range minus10 + 50 C
them to integrate with the environment easily However noprevious works using an intruder detection system throughcooperation with mobile sensor nodes have ever been appliedAs far as is known there are no companies providing this typeof application Otherwise specialized companies (CrossbowTechnologies1 Sentilla2 Libelium3) offering hardware fordesigning and deploying similar kinds of applications wouldbe offering such systems
3 Specification of the surveillance agent
This section describes the mechanism used by the vpSA forthe detection of intruders as well as its architectonic andfunctional description Moreover the selected middleware thatallows deployment of the agent and provides basic servicessuch as communication support is outlined
Presence detection mechanisms are used in cases where aperimeter has not been physically defined or when a perimeteris not visible to people for security reasons Thus presencedetection systems generate an invisible barrier around theperimeter and perform actions when the perimeter is alteredin order to prevent intrusions In the following section thefeatures of the sensors used for detecting intrusions at theperimeter are described
31 Characterization of passive infrared sensors
PIR sensors are pyroelectric devices They can be used fordetecting movements by means of changes in temperatureemitted by objects inside the marked area Treatment ofPIR sensor data is simpler than those implemented by amicrophone ultrasound or other visual means and contrastThey do not require any device or object detection signalPIR sensors have proven performance and are inexpensiveand easy to integrate with other systems [12] Thus they arewidely applied in alarm systems lighting controlled by motionand robotics applications such as intrusion detection [13]
For this study a Luminite TX50040 passive infraredsensor has been used4 This provides a detection range ofup to 40 times 1 (see table 1) The TX50040 PIR sensor is forlong-range narrow applications being suitable for perimeterprotection A 9 V lithium PP3 battery powers this PIR
1 Crossbow Corporation Inc (available at httpwwwxbowcom)2 Sentilla Corporation (available at httpwwwsentillacom)3 Libelium Comunicaciones Distribuidas SL (available athttpwwwlibeliumcom)4 Luminite Electronics Ltd (available at httpwwwluminitecoukproductpagephpWEBYEP DI=301)
32 Middleware
As was presented in previous sections the vpSA approachis based on agent paradigm This technology requires spacefor interpretation storage and control commonly known aslsquoagent platformrsquo Agent platforms are standardized by theFoundation for Intelligent Physical Agents (FIPA)5 Thisplatform provides different services such as communicationamong agents reactivity and behaviour In order to providesupport for deployment of the agent in the sensor nodeslightweight software has been used in order to provideabstraction from the underlying sensor platform heterogeneityand communication at a network level by means of anapplication programming interface (API) In this manner aμSMS (micro subscription management system) middlewareapproach has been developed in the framework of the μSWNResearch Project6
The main reason for using μSMS middleware abstractionis its ease for providing deployment of agent-basedservices over resource-constraint devices Among thesefeatures we can emphasize the development of lightweightcomponent-based services as well as the event-drivenpublishsubscribe communication paradigm On the onehand the publishsubscribe interaction model is widelyapplied in WSNs because it offers an asynchronous interactionmodel between components The components are notifiedwhen an event of interest is generated without havingto continuously poll the data source This enhances thedecoupling between information producers and consumerswhile minimizing energy consumption [14] Moreover thisarchitecture uses the middleware components paradigm forservice creation The use of these components offers severaladvantages to software engineering These advantages includeindependence (low coupling between architecture pieces)interoperability (by means of well-specified service interfacecontract) and reusability (business logic of the componentsis properly encapsulated) Considering μSMS proposal theinterface of each component is very compact That meansthe minimum required methods for controlling the lifecycle ofeach component (see section 33) and the minimum to interactwith the rest of the architecture by using an underlying event-based model have been defined This allows the frameworksubsystem to schedule the components in a low-consumptionmode in order to increase the autonomy of the sensor nodes
At this point μSMS architecture can be seen as a multi-agent platform for enriched service composition on WSNsThis middleware approach provides support for the exchangeof information between sensor nodes in a lightweight mannerwhich is a cornerstone in embedded computing devices suchas WSN6 Figure 1 illustrates the core components diagramof the architecture where the vpSA is deployed
The description of the main elements of the μSMSarchitecture is as follows
Resources This middleware component is responsiblefor controlling hardware resources of the nodes Its main
5 Foundation for Intelligent Physical Agents (available athttpwwwfipaorgspecsfipa00023indexhtml)6 μSWN Solving Major Problems in Micro Sensorial Networks (IST-034642) European FP6 Project Site wwwuswneujindexphp
3
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 1 Overview of the μSMS middleware architecture
functions include management of timers LEDs DAC(digital to analogue converter) ADC (analogue to digitalconverter) GPIO (general purpose IO) and batteriesamong othersSubscriber This middleware component represents thekernel of the publishsubscribe system It providespublication and subscription capabilities to the rest ofthe components in the architecture In this manner thesubscriber allows the application agents to exchange datawith the agents deployed in the rest of the network nodesthrough eventing serviceCommunication This middleware component isresponsible for sending and receiving data events in thesensor network It uses the services offered by the NPL(network protocol layer) subsystem offering the rest ofthe architecture a well-defined interface to support theinter-node communicationFramework This middleware subsystem is responsiblefor managing the lifecycle of the component and agentsin the nodes The main task of the framework subsystemis the execution scheduling of the components that areinstantiated in the nodesHardware abstraction layer (HAL) This subsystemallows taking advantage of the resources of the sensornodes by isolating the application agents from theunderlying hardware heterogeneity Thus using theservices offered by HAL the resources componentprovides a uniform interface to access the physical nodecapabilitiesNetwork protocol layer (NPL) This subsystem encapsu-lates the low-level radio communication protocols Itsobjective is to decouple the middleware of the specificused routing scheme features using a stratified approachCommunication component wraps in order to provide acommon interface with independence from the specific
implementation applied in the NPL The following sub-sections explain the technical details of the physical MACand routing protocol layers that have been used
321 Physical and MAC layers This approach is based onIEEE Std 802154-2006 which specifies a standard protocolstack widely used in a low-rate wireless personal area network(LR-WPAN) IEEE 802154 protocol stack defines a physical(PHY) layer and a medium access control (MAC) layer ThePHY layer operates at 868 MHz (11 radio channels 20 kbps)915 MHz (11 radio channels 40 kbps) and 24 GHz (16radio channels 250 kbps) frequency bands with a wirelesstransmission range up to 100 m The IEEE 802154 MAClayer uses a CSMA-CA (carrier sense multiple access-collisionavoidance) algorithm to detect and avoid collisions in a sharedtransmission medium offering a guaranteed time slot (GTS) asthe optional mechanism This feature is focused on allocating aspecific duration within a superframe structure in order to offerlow latency for user applications with real-time requirements
322 Routing protocol ZigBee specification 2006networking technology has been considered in this approachIt is an IEEE 802154-based protocol stack aiming to achievelow cost and low power consumption in resource constraintand embedded devices This standard defines over anIEEE 802154 MAC layer a network (NWK) layer and anapplication support (APS) layer The NWK layer implementsthe routing protocol which offers multi-hop communicationsupport for several networking topologies including starcluster tree and mesh the latest has been used in our WSNdeployment Moreover confidentiality service is provided bythis routing scheme using 128 bits symmetric cryptographyfor the advanced encryption service (AES) protocol TheAPS layer is over NWK in order to offer a set of generalfunctionalities such as services of binding and discovery
33 Agent properties
The most important properties of the proposed vpSA are asfollows
Agent status It describes the necessary information todistinguish between two agents of the same type Thestate is mainly affected by the agent inputs which aredata acquired by the sensors and information from otheragentsAgent behaviour It defines the agentrsquos ability to react to aspecific execution condition based on the perception andaction taken previously Thus the agent makes decisionsaccording to the event detected by the sensorsCommunication capabilities vpSA has interactioncapabilities among nodes through the agent middlewareplatform provided by the μSMS abstraction Aspreviously mentioned it offers agents support to interactwith other actors through publishsubscribe paradigmusing an event-driven communication modelAutonomy vpSA performs its task without interventionfrom humans or other agents through orders andorqueries The agent is interested in a specific event
4
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 2 State diagram of the fixed nodes
so when this event occurs the agent executes thecorresponding action This procedure implies thatagents running on the mobile node wake up from alow power consumption mode and consequently performcorresponding functions automaticallyCommon objectives Both in the fixed and mobile nodesagents perform a set of specific tasks They interact toachieve common lsquodetecting presencersquo goalLifecycle The agent has capacity of being lsquobornrsquo when itis developed and activated to lsquoliversquo while it is operationalto lsquoclonersquo itself by distributing its knowledge over mobilenodes in order to fulfil its main objective and to lsquodiersquowhen it is unloaded from the node
34 Surveillance agent roles
Agents have been installed in two types of sensor nodes lsquofixednodesrsquo and lsquomobile nodesrsquo Fixed nodes are used for makingthe virtual perimeter and lsquomobile nodesrsquo are used for detectingclients and assistant staff The main agent functionalities inthese nodes are as follows
341 Fixed nodes The virtual perimeter is made up of fixednodes These nodes are equipped with PIR sensors which candetect any motion from people crossing the perimeter Thefixed nodes distinguish clients assistant staff and intrudersThis information is then sent to the sink node and fromthere to the security staff of the sanatorium via WiFi Allthe collected information is stored in a database
342 Mobile nodes The clients and assistant staff areequipped with this kind of node The nodes send a signalidentifying themselves when a fixed node of the virtualperimeter makes a request They have a business logic thatallows collaborating with the fixed nodes to discern the typeof intrusion (ie authorized or unauthorized)
35 Surveillance agent functions
The main design goals of the vpSA are as follows
bull Detection of access to the perimeter of clients identifyingsanatorium staff or intruders passing through the area
bull Alarm indication directed to sanatorium securitypersonnel reporting that an unauthorized person hascrossed the perimeter
351 Agent functions in the fixed nodes As shown infigure 2 vpSA located in the fixed nodes remains in a lowpower consumption mode until the virtual perimeter is crossedOnce the agent receives an lsquoaltered infrared sensorrsquo eventthe identification of its neighbours will be requested Ifthere are mobile nodes in this area they have to respondwith their identification to the fixed node so it can informbracelet identification to the security personnel and determinethe lsquobracelet presencersquo event Otherwise if an intruder hasaltered the perimeter the fixed node will process an alarmof lsquointruder presencersquo and inform the security staff Theperiod of time between the request for identification and itscorresponding response depends mainly on the time requiredbetween the sensor nodes (fixed and mobile) to communicateand exchange such events In any case the time is not morethan 3 s for the fixed nodes and 2 s for the mobile nodes
352 Agent functions in the mobile nodes The vpSAlocated in the mobile nodes remains in a low powerconsumption mode until an identification request event isreceived from the fixed node (perimeter node) Once theagent receives a lsquorequest identificationrsquo event it responds tothe perimeter node that has requested for it The time thattranspires is not more than 2 s The agent then returns to thelow-consumption mode
4 Implementation details
The vpSA has been deployed at the Versme Sanatorium inBirstonas (Lithuania) Two different types of nodes have beeninstalled fixed nodes that make up the virtual perimeter andmobile nodes (bracelets) that are worn by sanatorium patientsand authorized staff Messages are interchanged when thevirtual perimeter is crossed both by a bracelet or an intruder
Figure 3 shows the vpSA deployed in fixed nodes aspreviously subscribed to lsquoALTERED INFRARED SENSORrsquoevents This kind of event will be thrown by the Resources
5
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 3 Surveillance scenario lsquobracelet detectionrsquo use case
Figure 4 Surveillance scenario lsquointruder detectionrsquo use case
component of the μSMS middleware when the PIR sensor isexcited When a presence is detected the fixed node connectedto the PIR sensor generates a lsquoNODEID REQUESTrsquo externalpublication which will be delivered to the neighbouring nodesvia broadcast communication The bracelet node that crossesthe perimeter has to reply with a lsquoNODEID RESPONSErsquoexternal publication the fixed node will wait for the answerfrom the bracelet node for a short period of time (3 s) If thelsquoNODEID RESPONSErsquo event is received from the braceletnode the fixed mote will throw a lsquoBRACELET PRESENCErsquoevent containing the identification of the bracelet node thathas generated the presence in the perimeter Otherwise inthe case of intruder detection an lsquoINTRUDER PRESENCErsquoevent will be generated (see figure 4)
5 Validation scenario
In order to validate our approach in the real-worldenvironment a surveillance perimeter has been deployed atthe Versme Sanatorium in Birstonas (Lithuania) as shown infigure 5 This sanatorium is an establishment for specializedtreatment and recreation providing rehabilitation supportrehabilitation ambulatory rehabilitation and sanatoriumtreatment services
A WSN has been deployed using fixed nodes to markthe virtual perimeter on the external part of the sanatoriumwhich is 810 m long In order to enable the mechanism ofidentification in the fixed nodes a bracelet (mobile node) isassigned to every patient and assistant staff at the sanatorium
6
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 5 Virtual perimeter in sanatorium
During the evaluation 14 patients each wearing a braceletwere supervized by 5 assistant staff The bracelets are madeof Crossbow TelosB nodes (so-called motes) that integrateadditional biomedical sensors in order to spread their capacityof sensing data such as heart rate body temperature andhumidity In some particular cases the sanatorium staff willuse a PDA to receive presence events from the perimeterWhen an intruder is detected inside the perimeter the fixednode alerts the security staff by reporting the type of intrusionwhich could have been generated by a client or by an intruderThe personnel will then have to confirm the event and makedecision accordingly The data about the event are saved in adatabase for further analysis and consultation
Figure 5 shows the fixed nodes deployed around thesanatorium perimeter represented by dots They containPIR sensors which are used to detect the presence of peoplecrossing the perimeter
The virtual perimeter is made up of 50 TelosB mote sensorplatforms and used as implementation target Because ofproject cost constraints a sub-perimeter has been selected inorder to deploy the validation scenario Only 16 nodes from50 needed to cover the complete perimeter were used In thenext stage of the project the perimeter will be completelycovered by deploying 34 more nodes In the TelosB platforma sensor board can be plugged into each sensor node (mote)in order to carry out several environment readings includinglight temperature humidity infrared etc The deployedTelosB runs on two AA batteries with a lifespan thatdepends on communication use and computation resourcesCommunications within a 75ndash100 m outdoor range varygreatly under environmental conditions as can be observedin the datasheet The motes run the TinyOS operating systemsand are equipped with 48 kB of flash memory and 10 kB ofRAM memory IEEE 802154-compliant radio Moreover
these nodes are equipped with infrared sensors (LUMINITETX50040)
51 Deployment requirements
In the preliminary tests it was identified that the same physicalevent was detected by two or more nodes generating alarmsin places where incursions were not carried out This was dueto the overlapping of motes coverage ratio inside the detectionarea In other words two motes shared part of their detectionarea
Hence it was also determined that the deployment of fixednodes considers the intersection range of the infrared sensorsThis intersection area just involves two consecutive fixed nodesthat take part of the surveillance perimeter Thus it has beenguaranteed that the bracelet will only respond to those fixednodes involved in the sector where it has crossed It therebyreduces false alarms Two major requirements are necessaryin order to enable a proper detection of people wearingbracelets the two nodes involved in a perimeter sector haveto be deployed within the maximum PIR detection distancebetween them (40 m) and their PIRs must be accuratelybrought face to face This ideal scenario is illustrated infigure 6
As a validation requirement multi-hop radio configura-tion has been validated Network deployment was designedso as not to exceed five hops between sensor nodes and sinknode In order to set this scenario up both physical locationof sensor nodes and strength of their radio signal were takeninto account
52 Validation results
It took a period of 8 days to carry out the tests During thistime both intrusion and authorized (identified by bracelets)incursions through the perimeter were generated Figure 7illustrates the alarm generated on the application of the securitystaff once the perimeter has been violated The WSN-CAD surveillance application graphically shows two kindsof perimeter crossings performed by a bracelet (authorizedaccess) and intruder
In this period the energy consumption of the hardwarecomponents making up the virtual perimeter surveillance hasbeen determined
This study was focused on calculating the autonomy of oursurveillance system paying special attention to the perimeternodes since replacing their batteries is a bit difficult they areusually hung from lampposts or similar places that are noteasily accessible Such a problem for mobile nodes does notoccur since they are completely accessible to users
As previously mentioned TelosB motes and LuminiteTX50040 PIRs are the two main hardware components of theperimeter nodes Luminite TX50040 PIRs are connected toTelosB motes through their GPIO pins Each of those hardwareelements has its own energetic characteristics (see tables 2and 3) so consumption calculations have to be performedindependently
In order to calculate the autonomy of both TelosB moteand Luminite TX500 PIR according to the generated events
7
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 6 PIR sensor deployment conditions
Figure 7 WSN-CAD surveillance application
Table 2 Consumption of hardware execution modes
Hardware Execution Currentcomponent mode consumption
TelosB mote Tx mode (0 dBm) 253 mARx mode 23 mAIdle mode 21 μA
Luminite Stand-by mode 9 μATX50040 PIR Alarm mode 20 mA
of presence during validation (see table 4) let us considera balanced distribution of those events of presence betweennodes that make up the virtual perimeter In this manner 42events of presence are counted in total (per day and node)of which 13 events are of INTRUDER PRESENCE and 29events are of BRACELET PRESENCE
Table 3 Battery supply for hardware components
Hardwarecomponent Battery Battery features
TelosB mote 4xAA (redesignedmotes)
Lithium rechargeable15 V 2900 mAh
LuminiteTX50040 PIR
1xPP3 Lithium 9 V 230 mAh
Table 4 System validation results
Use case
Classification Bracelet Intruder
True positive (tp) 4277 1125False positive (fp) 17 8False negative (fn) 0 0
521 Luminite TX50040 PIR autonomy analysis Whena Luminite TX50040 PIR is excited because of a perimetercrossing the PIR hardware turns from lsquostand byrsquo mode tolsquoalarmrsquo mode The lsquoalarm modersquo of Luminite TX50040 PIRactivates for 3 s every time it is excited The PIR therebyworks in that mode almost 1 min per day consuming 092 mAhaccording to energy data shown in tables 2 and 3 Thereforethe Luminite TX50040 PIR can autonomously work for 251days it is equivalent to detecting approximately 10 542 eventsof presence
522 TelosB mote autonomy analysis Every time fixednodes process an event of presence TelosB motes needto send two messages via radio (see figure 2) first aNODEID REQUEST publication and second a PRESENCEevent to identify the kind of detected presence Eventually ifa NODEID RESPONSE event is received from a braceletthen a BRACELET PRESENCE event is thrown to thegateway otherwise an INTRUDER PRESENCE event isthrown The node has to switch the RF transceiver onfor 8 ms in order to transmit the two necessary messages(NODEID REQUEST and PRESENCE event) and 43 ms
8
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
to receive a NODEID RESPONSE event if needed Takinginto account the TelosB mote energy characteristics as shownin tables 2 and 3 the mote consumption is 4371 mAhper day Originally TelosB mote was equipped with 2AA batteries but fixed TelosB motes were redesigned inorder to increase their autonomy by enabling two more AAbatteries From the consumption per day previously obtainedfixed TelosB motes making up the virtual perimeter canthereby autonomously work for 265 days this is equivalentto transmitting approximately 11 130 events of presence
53 Performance evaluation
In this section experimental results that evaluate theperformance of the surveillance-agent system based on WSNsdescribed in the previous section are presented
Table 4 shows the results obtained during systemvalidation The results are classified into three categoriesThe first set of results true positive (tp) refers to those eventsproperly discerned by the node indicating who crossed theperimeter During the validation test 4277 bracelets and 1125intruders were detected as true positive (ie bracelet nodes andintruders respectively)
The second set of results false positive (fp) indicates that(1) 17 bracelet accesses were detected as intruder and (2) 8intruder accesses were detected as bracelet In the case of (1)it has been concluded that the false positive was caused by adeficient radio signal of either fixed node or of the bracelet(eg reflections attenuations and interferences) which didnot allow proper communication among bracelets and fixednodes It is then not possible to exchange messages thatallow identification of the mobile node In order to avoidthis situation the characteristics of deployment in order tooptimize the performance of the PIRs have been modified Inthe case of (2) false positive was due to an intruder crossingthe perimeter when there was a bracelet in the radio coveragearea of the fixed node
Finally false negative (fn) represents those events ofpresence that occurred inside the perimeter and that were notdetected by the node False negative was 0 as in all casesan alarm was generated when the perimeter was crossed byeither an intruder or a bracelet
According to the data shown in table 4 the performancemetrics defined in [15] have been adapted in order to determineboth precision and recall of the system
In the context of this work precision indicates thepercentage of detections properly classified from the totaldetections Specifically precision is the number of truepositives divided by the total number of elements labelledas belonging to the positive class Thus precision is obtainedby applying (1) that corresponds to 99 which indicates thatthe system has a high degree of precision This rate has beenachieved through collaborating fixed nodes with mobile nodes
precision = tp
tp + fp (1)
Regarding recall it indicates the number of eventscorrectly detected from those that should have been detectedHence the number of detected events of presence from the total
occurred presence has been obtained by applying expression(2) which corresponds to 1 That has been so due todeployment as explained in section 51 that allowed notonly the detection of every unauthorized crossing which isthe major goal of our surveillance-agent system but also thedetection of every perimeter intrusion from authorized staffand patient crossings
recall = tp
tp + f n (2)
54 Lessons learned
The work described in this paper is our experience with apervasive surveillance agent based on WSNs in a practicalapplication and its evaluation through an actual deploymentof motes Several lessons have been learnt from the workperformed in this research which can be applied to makingdecisions during the development of a system related topervasive surveillance The following points are someremarks that could be useful to future researchers involvedin the development and management of pervasive surveillancesystems based on WSNs
bull The sensors for deployment have to be chosen consideringthe characteristics of coverage to be modelled
bull The geographical factors of the place that will bemonitored for the detection of intrusions have to be takeninto account
bull The number of required sensors has to be calculatedin order to guarantee the expected security level fromthe sensed spatial density and the critical level of themonitored area
bull The set of information which is extracted from datathat is generated by the agent allows determiningthe weaknesses of the coverage area and discoveringvulnerabilities for hypothetical intrusion paths
6 Conclusions and future research
The work described in this paper has presented our experienceabout developing a surveillance system using WSNs forpractical applications and evaluating their deployment inthe real world A mechanism for controlling virtualperimeters using WSN that manage mobile nodes in a specificenvironment has been proposed A deployment mechanismhas been used in order to guarantee effective detection andan efficient use of motes which operate in a low powerconsumption mode in periods when events are not receivedIn addition the lsquointelligencersquo of the agent has been distributedby using mobile nodes to discern who has caused the eventof presence the client the sanatorium staff or the intruderMoreover our system has the capacity to detect more than oneauthorized person crossing the perimeter since the system isbased on intelligent distribution supported by mobile nodesThis characteristic contributes in saving both processingresources and power consumption
The deployment of this solution results in cost savingsbecause cables are not required during installation Therefore
9
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
this kind of deployment could become more spatially densethan traditional approaches Currently those mechanisms playan important role in building confidence in our environment toensure safety becoming key elements for preventing multipletypes of threats and allowing better quality of life for humans
As future research the manner how to integrate theagent in the formation of dynamic surveillance of virtualperimeters in runtime will be studied Advanced context-aware applications could be developed from this improvement(eg from livestock control to baggage logistics) It isa research challenge which could be solved by designingmulti-sensorial surveillance systems that combine differentdata sources from diverse positional sensors (eg ultrasonictransducer stereo vision laser triangulation)
Acknowledgments
The work presented in this research paper has been partiallyfunded by the VI Framework Programme of the EuropeanUnion within the μSWN lsquoSolving Major Problems in Microsensorial Wireless Networksrsquo project (code TSI-034642)The authors would like to thank the anonymous reviewersfor their valuable comments
References
[1] Garcıa-Hernandez C F Ibarguengoytia-Gonzalez P HGarcıa-Hernandez J and Perez-Dıaz J A 2007 Wirelesssensor networks and applications a survey Int J ComputSci Netw Secur 7 270
[2] Garcia M L 2008 Design and Evaluation of PhysicalProtection Systems (Portsmouth NHButterworth-Heinemann) pp 86ndash8
[3] Garcıa A B Martınez J F Lopez J M Prayati A and RedondoL 2008 Problem Solving for Wireless Sensor Networks(Computer Communications and Network Series)(London Springer) pp 177ndash207
[4] Bounabat B Romadi R and Labhalla S 1999 Designingmulti-agent reactive systems a specification method based
on reactive decisional agents Approaches to IntelligenceAgents (Berlin Springer) p 775
[5] Romadi R and Berbia H 2008 Wireless sensor network aspecification method based on reactive decisional agents3rd Int Conf on Information and CommunicationTechnologies From Theory to Applications (ICTTA 2008)pp 1ndash5
[6] Frantisek Z Jr and Frantisek Z 2008 Simulation for wirelesssensor networks with intelligent nodes 10th Int Conf onComputer Modeling and Simulation (UKSIM 2008)pp 746ndash51
[7] Wang X Bi D-W Ding L and Wang S 2007 Agentcollaborative target localization and classification WirelSensor Netw Sensors 7 1359ndash86
[8] Rogers A Corkill D D and Jennings N R 2009 Agenttechnologies for sensor networks Intell Syst IEEE24 13ndash7
[9] Byunghun S Haksoo Ch and Hyung S L 2008 Surveillancetracking system using passive infrared motion sensors inwireless sensor network Int Conf on InformationNetworking (ICOIN 2008) pp 1ndash5
[10] Li Y Y and Parker L 2008 Intruder detection using a wirelesssensor network with an intelligent mobile robot responseProc IEEE SoutheastCon (Huntsville AL USA) pp 37ndash42
[11] Zappi P Farella E and Benini L 2007 Enhancing the spatialresolution of presence detection in a PIR based wirelesssurveillance network IEEE Conf on Advanced Video andSignal Based Surveillance (AVSS 2007) pp 295ndash300
[12] Singh J Madhow U Kumar R Suri S and Cagley R 2007Tracking multiple targets using binary proximity sensorsProc 6th Int Conf on Information Processing in SensorNetworks (IPSN rsquo07) (Cambridge MA USA) (New YorkACM) pp 529ndash38
[13] Moghavvemi M and Lu Ch S 2004 Pyroelectric infraredsensor for intruder detection TENCON 2004 IEEE Region10 Conf vol 4 pp 656ndash9
[14] Boonma P and Suzuki J 2009 Toward interoperablepublishsubscribe communication between sensor networksand access networks IEEE Consumer Communications andNetworking Conf pp 1ndash6
[15] Yuan Y L and Parker L E 2008 Detecting and monitoringtime-related abnormal events using a wireless sensornetwork and mobile robot IEEE RSJ Int Conf onIntelligent Robots and Systems (IROS 2008) pp 3292ndash8
10

Meas Sci Technol 21 (2010) 124005 J F Martınez et al
taken into account Regarding this topic Garcıa [2] claimsthat the sensor networks allow security system designers toquickly and easily place individual sensorcommunicationOn the other handother advantages of WSNs when applied topublic buildings such as saving cost in the wiring installationand having ubiquitous connection are mentioned in [3]They are unobtrusive and also require less maintenanceHowever WSNs have limited power supply computationalcapacities memory and short-range radio communicationfeatures Thereby WSN-based surveillance systems have to bedesigned taking into account some trade-offs between lsquosystemgoalsrsquo and efficient use of hardware resources
In this research paper a virtual perimeter surveillanceagent (vpSA) is proposed It implements mobile nodesmanagement based on a reactive agentrsquos model The agentrsquosmain goal is to deal with the detection of objects that crossan invisible barrier around a given perimeter of the VersmeSanatorium in Birstonas (Lithuania) The agent deployedin the perimeter nodes analyses the data received from theenvironment when the virtual perimeter is crossed discerningpatients assistant staff (authorized access) and intruders(unauthorized access) It consequently sends an alarmnotification to the security staff Thus our agent perceivesa situation occurred in the environment and makes a decisionon that perception A vpSA approach has been developedas a reactive agent that does not have any internal symbolicmodels of its environment It acts as a stimulusresponse typeof behaviour by responding to the current security perimeterestablished by the fixed nodes In order to improve networkautonomy which is one of the major challenges in WSNs alow power consumption mode has been designed In orderto achieve low power consumption the agent is scheduled ina sleep mode during its normal operation When the virtualperimeter is crossed the agent passes to a lsquowake-up statersquo inorder to carry out required decisions
Other parts of this paper have been organized as followssection 2 explains the related work focused on developingsurveillance solutions using WSNs Section 3 describesthe theoretical foundations of our proposal in detail thatinclude system specifications and pervasive agent features andproperties Section 4 explains the experience observed in thedeployment of the surveillance agent in the real environmentSection 5 shows validation results of the agent as well as someinteresting notes based on our field deployment experiencesFinally concluding remarks and future research lines areanalysed in section 6
2 Related work
A reactive agent acts using a stimulusresponse type ofbehaviour hence it does not have any internal symbolicmodels of the environment and acts according to the resultof stimulus generated within [4] WSNs are defined by a set ofagents connected to each other by communication interfaces[5] These kinds of ubiquitous networks interact with theirenvironment by means of
bull actions exerted by the environmentbull external states emitted to the environment
According to the previous study each agent of the WSNcan be defined as a reactive decisional agent that cooperateswith other network operators in order to achieve a specificobjective In the literature [6ndash8] several proposals to modelthe WSN as heterogeneous agent systems are presented
Byunghun et al [9] propose a surveillance system using apassive infrared (PIR) sensor to detect movement in a homeoffice or factory First it analyses the use of PIR sensors bysecurity systems proposing a region-based human trackingalgorithm This algorithm is based on PIR sensors to know theregion where an object is located They model the detectionregion of the PIR sensors based on location coordinatespread angle detection range and constant radius (maximumdetection distance) of the PIR sensor In this manner they setthe detection area accurately and show how to deploy the PIRsensors so as to detect human movement However detectionis highly dependent on the sensor deployment Furthermorethis mechanism has only been tested to detect one person at atime
Li and Parken [10] propose an anomaly detection systemby using WSNs and mobile robots The architecture proposesa cluster topology Each cluster has a cluster head and multiplecluster members Each cluster covers a geometric regionand is responsible for detecting the environmental changesin that region The sensor network uses a fuzzy adaptiveresonance theory (ART) neural network to detect intrudersThe system detects time-related changes by using the Markovmodel First the sensor network learns what conditions ofan environment are lsquonormalrsquo and then compares the currentenvironment conditions with the reference model in order todetect environmental changes
When a change is detected the WSN determines thatconditions of the environment do not match the referencemodel It informs the mobile robot about such a situation therobot then displaces to the area to verify whether the reportedevent is related to an intruder Intrusion detection in WSNsprovides higher flexibility due to the collaboration of robots inreaching places and performing tasks that cannot be performedby fixed nodes
Zappi et al [11] propose a technique that detects humanswho cross through a door or gate In this approach four sensornodes are used three of them are equipped with infraredsensors that sample the output of the PIR detector and identifythe number of peak pairs and the direction of the first peakThe fourth node sensor receives all information and infers thenumber of people and direction of movement The numberof persons is extracted by means of the number of peaksdetected by each node and duration of the second peak whichis measured by the central node The direction of movementis detected by looking at the indication of the three sensorsThe most important limitations of this system are its highdependence on network topology and set-up of PIR sensors
According to the literature described in this section itis concluded that WSNs are widely used in tracking eventsor objects (eg building monitoring and control industrialprocess control and energy monitoring) by means of theirwireless communication capabilities their easy interactionwith other external networks and their tiny sizes that allow
2
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Table 1 Characteristics of the Luminite TX50040 PIR detector
Items Datasheet
Detection distance 40 mField of view 1
Supply voltage 9 V from PP3Consumption in stand-by mode 9 μATemperature range minus10 + 50 C
them to integrate with the environment easily However noprevious works using an intruder detection system throughcooperation with mobile sensor nodes have ever been appliedAs far as is known there are no companies providing this typeof application Otherwise specialized companies (CrossbowTechnologies1 Sentilla2 Libelium3) offering hardware fordesigning and deploying similar kinds of applications wouldbe offering such systems
3 Specification of the surveillance agent
This section describes the mechanism used by the vpSA forthe detection of intruders as well as its architectonic andfunctional description Moreover the selected middleware thatallows deployment of the agent and provides basic servicessuch as communication support is outlined
Presence detection mechanisms are used in cases where aperimeter has not been physically defined or when a perimeteris not visible to people for security reasons Thus presencedetection systems generate an invisible barrier around theperimeter and perform actions when the perimeter is alteredin order to prevent intrusions In the following section thefeatures of the sensors used for detecting intrusions at theperimeter are described
31 Characterization of passive infrared sensors
PIR sensors are pyroelectric devices They can be used fordetecting movements by means of changes in temperatureemitted by objects inside the marked area Treatment ofPIR sensor data is simpler than those implemented by amicrophone ultrasound or other visual means and contrastThey do not require any device or object detection signalPIR sensors have proven performance and are inexpensiveand easy to integrate with other systems [12] Thus they arewidely applied in alarm systems lighting controlled by motionand robotics applications such as intrusion detection [13]
For this study a Luminite TX50040 passive infraredsensor has been used4 This provides a detection range ofup to 40 times 1 (see table 1) The TX50040 PIR sensor is forlong-range narrow applications being suitable for perimeterprotection A 9 V lithium PP3 battery powers this PIR
1 Crossbow Corporation Inc (available at httpwwwxbowcom)2 Sentilla Corporation (available at httpwwwsentillacom)3 Libelium Comunicaciones Distribuidas SL (available athttpwwwlibeliumcom)4 Luminite Electronics Ltd (available at httpwwwluminitecoukproductpagephpWEBYEP DI=301)
32 Middleware
As was presented in previous sections the vpSA approachis based on agent paradigm This technology requires spacefor interpretation storage and control commonly known aslsquoagent platformrsquo Agent platforms are standardized by theFoundation for Intelligent Physical Agents (FIPA)5 Thisplatform provides different services such as communicationamong agents reactivity and behaviour In order to providesupport for deployment of the agent in the sensor nodeslightweight software has been used in order to provideabstraction from the underlying sensor platform heterogeneityand communication at a network level by means of anapplication programming interface (API) In this manner aμSMS (micro subscription management system) middlewareapproach has been developed in the framework of the μSWNResearch Project6
The main reason for using μSMS middleware abstractionis its ease for providing deployment of agent-basedservices over resource-constraint devices Among thesefeatures we can emphasize the development of lightweightcomponent-based services as well as the event-drivenpublishsubscribe communication paradigm On the onehand the publishsubscribe interaction model is widelyapplied in WSNs because it offers an asynchronous interactionmodel between components The components are notifiedwhen an event of interest is generated without havingto continuously poll the data source This enhances thedecoupling between information producers and consumerswhile minimizing energy consumption [14] Moreover thisarchitecture uses the middleware components paradigm forservice creation The use of these components offers severaladvantages to software engineering These advantages includeindependence (low coupling between architecture pieces)interoperability (by means of well-specified service interfacecontract) and reusability (business logic of the componentsis properly encapsulated) Considering μSMS proposal theinterface of each component is very compact That meansthe minimum required methods for controlling the lifecycle ofeach component (see section 33) and the minimum to interactwith the rest of the architecture by using an underlying event-based model have been defined This allows the frameworksubsystem to schedule the components in a low-consumptionmode in order to increase the autonomy of the sensor nodes
At this point μSMS architecture can be seen as a multi-agent platform for enriched service composition on WSNsThis middleware approach provides support for the exchangeof information between sensor nodes in a lightweight mannerwhich is a cornerstone in embedded computing devices suchas WSN6 Figure 1 illustrates the core components diagramof the architecture where the vpSA is deployed
The description of the main elements of the μSMSarchitecture is as follows
Resources This middleware component is responsiblefor controlling hardware resources of the nodes Its main
5 Foundation for Intelligent Physical Agents (available athttpwwwfipaorgspecsfipa00023indexhtml)6 μSWN Solving Major Problems in Micro Sensorial Networks (IST-034642) European FP6 Project Site wwwuswneujindexphp
3
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 1 Overview of the μSMS middleware architecture
functions include management of timers LEDs DAC(digital to analogue converter) ADC (analogue to digitalconverter) GPIO (general purpose IO) and batteriesamong othersSubscriber This middleware component represents thekernel of the publishsubscribe system It providespublication and subscription capabilities to the rest ofthe components in the architecture In this manner thesubscriber allows the application agents to exchange datawith the agents deployed in the rest of the network nodesthrough eventing serviceCommunication This middleware component isresponsible for sending and receiving data events in thesensor network It uses the services offered by the NPL(network protocol layer) subsystem offering the rest ofthe architecture a well-defined interface to support theinter-node communicationFramework This middleware subsystem is responsiblefor managing the lifecycle of the component and agentsin the nodes The main task of the framework subsystemis the execution scheduling of the components that areinstantiated in the nodesHardware abstraction layer (HAL) This subsystemallows taking advantage of the resources of the sensornodes by isolating the application agents from theunderlying hardware heterogeneity Thus using theservices offered by HAL the resources componentprovides a uniform interface to access the physical nodecapabilitiesNetwork protocol layer (NPL) This subsystem encapsu-lates the low-level radio communication protocols Itsobjective is to decouple the middleware of the specificused routing scheme features using a stratified approachCommunication component wraps in order to provide acommon interface with independence from the specific
implementation applied in the NPL The following sub-sections explain the technical details of the physical MACand routing protocol layers that have been used
321 Physical and MAC layers This approach is based onIEEE Std 802154-2006 which specifies a standard protocolstack widely used in a low-rate wireless personal area network(LR-WPAN) IEEE 802154 protocol stack defines a physical(PHY) layer and a medium access control (MAC) layer ThePHY layer operates at 868 MHz (11 radio channels 20 kbps)915 MHz (11 radio channels 40 kbps) and 24 GHz (16radio channels 250 kbps) frequency bands with a wirelesstransmission range up to 100 m The IEEE 802154 MAClayer uses a CSMA-CA (carrier sense multiple access-collisionavoidance) algorithm to detect and avoid collisions in a sharedtransmission medium offering a guaranteed time slot (GTS) asthe optional mechanism This feature is focused on allocating aspecific duration within a superframe structure in order to offerlow latency for user applications with real-time requirements
322 Routing protocol ZigBee specification 2006networking technology has been considered in this approachIt is an IEEE 802154-based protocol stack aiming to achievelow cost and low power consumption in resource constraintand embedded devices This standard defines over anIEEE 802154 MAC layer a network (NWK) layer and anapplication support (APS) layer The NWK layer implementsthe routing protocol which offers multi-hop communicationsupport for several networking topologies including starcluster tree and mesh the latest has been used in our WSNdeployment Moreover confidentiality service is provided bythis routing scheme using 128 bits symmetric cryptographyfor the advanced encryption service (AES) protocol TheAPS layer is over NWK in order to offer a set of generalfunctionalities such as services of binding and discovery
33 Agent properties
The most important properties of the proposed vpSA are asfollows
Agent status It describes the necessary information todistinguish between two agents of the same type Thestate is mainly affected by the agent inputs which aredata acquired by the sensors and information from otheragentsAgent behaviour It defines the agentrsquos ability to react to aspecific execution condition based on the perception andaction taken previously Thus the agent makes decisionsaccording to the event detected by the sensorsCommunication capabilities vpSA has interactioncapabilities among nodes through the agent middlewareplatform provided by the μSMS abstraction Aspreviously mentioned it offers agents support to interactwith other actors through publishsubscribe paradigmusing an event-driven communication modelAutonomy vpSA performs its task without interventionfrom humans or other agents through orders andorqueries The agent is interested in a specific event
4
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 2 State diagram of the fixed nodes
so when this event occurs the agent executes thecorresponding action This procedure implies thatagents running on the mobile node wake up from alow power consumption mode and consequently performcorresponding functions automaticallyCommon objectives Both in the fixed and mobile nodesagents perform a set of specific tasks They interact toachieve common lsquodetecting presencersquo goalLifecycle The agent has capacity of being lsquobornrsquo when itis developed and activated to lsquoliversquo while it is operationalto lsquoclonersquo itself by distributing its knowledge over mobilenodes in order to fulfil its main objective and to lsquodiersquowhen it is unloaded from the node
34 Surveillance agent roles
Agents have been installed in two types of sensor nodes lsquofixednodesrsquo and lsquomobile nodesrsquo Fixed nodes are used for makingthe virtual perimeter and lsquomobile nodesrsquo are used for detectingclients and assistant staff The main agent functionalities inthese nodes are as follows
341 Fixed nodes The virtual perimeter is made up of fixednodes These nodes are equipped with PIR sensors which candetect any motion from people crossing the perimeter Thefixed nodes distinguish clients assistant staff and intrudersThis information is then sent to the sink node and fromthere to the security staff of the sanatorium via WiFi Allthe collected information is stored in a database
342 Mobile nodes The clients and assistant staff areequipped with this kind of node The nodes send a signalidentifying themselves when a fixed node of the virtualperimeter makes a request They have a business logic thatallows collaborating with the fixed nodes to discern the typeof intrusion (ie authorized or unauthorized)
35 Surveillance agent functions
The main design goals of the vpSA are as follows
bull Detection of access to the perimeter of clients identifyingsanatorium staff or intruders passing through the area
bull Alarm indication directed to sanatorium securitypersonnel reporting that an unauthorized person hascrossed the perimeter
351 Agent functions in the fixed nodes As shown infigure 2 vpSA located in the fixed nodes remains in a lowpower consumption mode until the virtual perimeter is crossedOnce the agent receives an lsquoaltered infrared sensorrsquo eventthe identification of its neighbours will be requested Ifthere are mobile nodes in this area they have to respondwith their identification to the fixed node so it can informbracelet identification to the security personnel and determinethe lsquobracelet presencersquo event Otherwise if an intruder hasaltered the perimeter the fixed node will process an alarmof lsquointruder presencersquo and inform the security staff Theperiod of time between the request for identification and itscorresponding response depends mainly on the time requiredbetween the sensor nodes (fixed and mobile) to communicateand exchange such events In any case the time is not morethan 3 s for the fixed nodes and 2 s for the mobile nodes
352 Agent functions in the mobile nodes The vpSAlocated in the mobile nodes remains in a low powerconsumption mode until an identification request event isreceived from the fixed node (perimeter node) Once theagent receives a lsquorequest identificationrsquo event it responds tothe perimeter node that has requested for it The time thattranspires is not more than 2 s The agent then returns to thelow-consumption mode
4 Implementation details
The vpSA has been deployed at the Versme Sanatorium inBirstonas (Lithuania) Two different types of nodes have beeninstalled fixed nodes that make up the virtual perimeter andmobile nodes (bracelets) that are worn by sanatorium patientsand authorized staff Messages are interchanged when thevirtual perimeter is crossed both by a bracelet or an intruder
Figure 3 shows the vpSA deployed in fixed nodes aspreviously subscribed to lsquoALTERED INFRARED SENSORrsquoevents This kind of event will be thrown by the Resources
5
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 3 Surveillance scenario lsquobracelet detectionrsquo use case
Figure 4 Surveillance scenario lsquointruder detectionrsquo use case
component of the μSMS middleware when the PIR sensor isexcited When a presence is detected the fixed node connectedto the PIR sensor generates a lsquoNODEID REQUESTrsquo externalpublication which will be delivered to the neighbouring nodesvia broadcast communication The bracelet node that crossesthe perimeter has to reply with a lsquoNODEID RESPONSErsquoexternal publication the fixed node will wait for the answerfrom the bracelet node for a short period of time (3 s) If thelsquoNODEID RESPONSErsquo event is received from the braceletnode the fixed mote will throw a lsquoBRACELET PRESENCErsquoevent containing the identification of the bracelet node thathas generated the presence in the perimeter Otherwise inthe case of intruder detection an lsquoINTRUDER PRESENCErsquoevent will be generated (see figure 4)
5 Validation scenario
In order to validate our approach in the real-worldenvironment a surveillance perimeter has been deployed atthe Versme Sanatorium in Birstonas (Lithuania) as shown infigure 5 This sanatorium is an establishment for specializedtreatment and recreation providing rehabilitation supportrehabilitation ambulatory rehabilitation and sanatoriumtreatment services
A WSN has been deployed using fixed nodes to markthe virtual perimeter on the external part of the sanatoriumwhich is 810 m long In order to enable the mechanism ofidentification in the fixed nodes a bracelet (mobile node) isassigned to every patient and assistant staff at the sanatorium
6
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 5 Virtual perimeter in sanatorium
During the evaluation 14 patients each wearing a braceletwere supervized by 5 assistant staff The bracelets are madeof Crossbow TelosB nodes (so-called motes) that integrateadditional biomedical sensors in order to spread their capacityof sensing data such as heart rate body temperature andhumidity In some particular cases the sanatorium staff willuse a PDA to receive presence events from the perimeterWhen an intruder is detected inside the perimeter the fixednode alerts the security staff by reporting the type of intrusionwhich could have been generated by a client or by an intruderThe personnel will then have to confirm the event and makedecision accordingly The data about the event are saved in adatabase for further analysis and consultation
Figure 5 shows the fixed nodes deployed around thesanatorium perimeter represented by dots They containPIR sensors which are used to detect the presence of peoplecrossing the perimeter
The virtual perimeter is made up of 50 TelosB mote sensorplatforms and used as implementation target Because ofproject cost constraints a sub-perimeter has been selected inorder to deploy the validation scenario Only 16 nodes from50 needed to cover the complete perimeter were used In thenext stage of the project the perimeter will be completelycovered by deploying 34 more nodes In the TelosB platforma sensor board can be plugged into each sensor node (mote)in order to carry out several environment readings includinglight temperature humidity infrared etc The deployedTelosB runs on two AA batteries with a lifespan thatdepends on communication use and computation resourcesCommunications within a 75ndash100 m outdoor range varygreatly under environmental conditions as can be observedin the datasheet The motes run the TinyOS operating systemsand are equipped with 48 kB of flash memory and 10 kB ofRAM memory IEEE 802154-compliant radio Moreover
these nodes are equipped with infrared sensors (LUMINITETX50040)
51 Deployment requirements
In the preliminary tests it was identified that the same physicalevent was detected by two or more nodes generating alarmsin places where incursions were not carried out This was dueto the overlapping of motes coverage ratio inside the detectionarea In other words two motes shared part of their detectionarea
Hence it was also determined that the deployment of fixednodes considers the intersection range of the infrared sensorsThis intersection area just involves two consecutive fixed nodesthat take part of the surveillance perimeter Thus it has beenguaranteed that the bracelet will only respond to those fixednodes involved in the sector where it has crossed It therebyreduces false alarms Two major requirements are necessaryin order to enable a proper detection of people wearingbracelets the two nodes involved in a perimeter sector haveto be deployed within the maximum PIR detection distancebetween them (40 m) and their PIRs must be accuratelybrought face to face This ideal scenario is illustrated infigure 6
As a validation requirement multi-hop radio configura-tion has been validated Network deployment was designedso as not to exceed five hops between sensor nodes and sinknode In order to set this scenario up both physical locationof sensor nodes and strength of their radio signal were takeninto account
52 Validation results
It took a period of 8 days to carry out the tests During thistime both intrusion and authorized (identified by bracelets)incursions through the perimeter were generated Figure 7illustrates the alarm generated on the application of the securitystaff once the perimeter has been violated The WSN-CAD surveillance application graphically shows two kindsof perimeter crossings performed by a bracelet (authorizedaccess) and intruder
In this period the energy consumption of the hardwarecomponents making up the virtual perimeter surveillance hasbeen determined
This study was focused on calculating the autonomy of oursurveillance system paying special attention to the perimeternodes since replacing their batteries is a bit difficult they areusually hung from lampposts or similar places that are noteasily accessible Such a problem for mobile nodes does notoccur since they are completely accessible to users
As previously mentioned TelosB motes and LuminiteTX50040 PIRs are the two main hardware components of theperimeter nodes Luminite TX50040 PIRs are connected toTelosB motes through their GPIO pins Each of those hardwareelements has its own energetic characteristics (see tables 2and 3) so consumption calculations have to be performedindependently
In order to calculate the autonomy of both TelosB moteand Luminite TX500 PIR according to the generated events
7
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 6 PIR sensor deployment conditions
Figure 7 WSN-CAD surveillance application
Table 2 Consumption of hardware execution modes
Hardware Execution Currentcomponent mode consumption
TelosB mote Tx mode (0 dBm) 253 mARx mode 23 mAIdle mode 21 μA
Luminite Stand-by mode 9 μATX50040 PIR Alarm mode 20 mA
of presence during validation (see table 4) let us considera balanced distribution of those events of presence betweennodes that make up the virtual perimeter In this manner 42events of presence are counted in total (per day and node)of which 13 events are of INTRUDER PRESENCE and 29events are of BRACELET PRESENCE
Table 3 Battery supply for hardware components
Hardwarecomponent Battery Battery features
TelosB mote 4xAA (redesignedmotes)
Lithium rechargeable15 V 2900 mAh
LuminiteTX50040 PIR
1xPP3 Lithium 9 V 230 mAh
Table 4 System validation results
Use case
Classification Bracelet Intruder
True positive (tp) 4277 1125False positive (fp) 17 8False negative (fn) 0 0
521 Luminite TX50040 PIR autonomy analysis Whena Luminite TX50040 PIR is excited because of a perimetercrossing the PIR hardware turns from lsquostand byrsquo mode tolsquoalarmrsquo mode The lsquoalarm modersquo of Luminite TX50040 PIRactivates for 3 s every time it is excited The PIR therebyworks in that mode almost 1 min per day consuming 092 mAhaccording to energy data shown in tables 2 and 3 Thereforethe Luminite TX50040 PIR can autonomously work for 251days it is equivalent to detecting approximately 10 542 eventsof presence
522 TelosB mote autonomy analysis Every time fixednodes process an event of presence TelosB motes needto send two messages via radio (see figure 2) first aNODEID REQUEST publication and second a PRESENCEevent to identify the kind of detected presence Eventually ifa NODEID RESPONSE event is received from a braceletthen a BRACELET PRESENCE event is thrown to thegateway otherwise an INTRUDER PRESENCE event isthrown The node has to switch the RF transceiver onfor 8 ms in order to transmit the two necessary messages(NODEID REQUEST and PRESENCE event) and 43 ms
8
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
to receive a NODEID RESPONSE event if needed Takinginto account the TelosB mote energy characteristics as shownin tables 2 and 3 the mote consumption is 4371 mAhper day Originally TelosB mote was equipped with 2AA batteries but fixed TelosB motes were redesigned inorder to increase their autonomy by enabling two more AAbatteries From the consumption per day previously obtainedfixed TelosB motes making up the virtual perimeter canthereby autonomously work for 265 days this is equivalentto transmitting approximately 11 130 events of presence
53 Performance evaluation
In this section experimental results that evaluate theperformance of the surveillance-agent system based on WSNsdescribed in the previous section are presented
Table 4 shows the results obtained during systemvalidation The results are classified into three categoriesThe first set of results true positive (tp) refers to those eventsproperly discerned by the node indicating who crossed theperimeter During the validation test 4277 bracelets and 1125intruders were detected as true positive (ie bracelet nodes andintruders respectively)
The second set of results false positive (fp) indicates that(1) 17 bracelet accesses were detected as intruder and (2) 8intruder accesses were detected as bracelet In the case of (1)it has been concluded that the false positive was caused by adeficient radio signal of either fixed node or of the bracelet(eg reflections attenuations and interferences) which didnot allow proper communication among bracelets and fixednodes It is then not possible to exchange messages thatallow identification of the mobile node In order to avoidthis situation the characteristics of deployment in order tooptimize the performance of the PIRs have been modified Inthe case of (2) false positive was due to an intruder crossingthe perimeter when there was a bracelet in the radio coveragearea of the fixed node
Finally false negative (fn) represents those events ofpresence that occurred inside the perimeter and that were notdetected by the node False negative was 0 as in all casesan alarm was generated when the perimeter was crossed byeither an intruder or a bracelet
According to the data shown in table 4 the performancemetrics defined in [15] have been adapted in order to determineboth precision and recall of the system
In the context of this work precision indicates thepercentage of detections properly classified from the totaldetections Specifically precision is the number of truepositives divided by the total number of elements labelledas belonging to the positive class Thus precision is obtainedby applying (1) that corresponds to 99 which indicates thatthe system has a high degree of precision This rate has beenachieved through collaborating fixed nodes with mobile nodes
precision = tp
tp + fp (1)
Regarding recall it indicates the number of eventscorrectly detected from those that should have been detectedHence the number of detected events of presence from the total
occurred presence has been obtained by applying expression(2) which corresponds to 1 That has been so due todeployment as explained in section 51 that allowed notonly the detection of every unauthorized crossing which isthe major goal of our surveillance-agent system but also thedetection of every perimeter intrusion from authorized staffand patient crossings
recall = tp
tp + f n (2)
54 Lessons learned
The work described in this paper is our experience with apervasive surveillance agent based on WSNs in a practicalapplication and its evaluation through an actual deploymentof motes Several lessons have been learnt from the workperformed in this research which can be applied to makingdecisions during the development of a system related topervasive surveillance The following points are someremarks that could be useful to future researchers involvedin the development and management of pervasive surveillancesystems based on WSNs
bull The sensors for deployment have to be chosen consideringthe characteristics of coverage to be modelled
bull The geographical factors of the place that will bemonitored for the detection of intrusions have to be takeninto account
bull The number of required sensors has to be calculatedin order to guarantee the expected security level fromthe sensed spatial density and the critical level of themonitored area
bull The set of information which is extracted from datathat is generated by the agent allows determiningthe weaknesses of the coverage area and discoveringvulnerabilities for hypothetical intrusion paths
6 Conclusions and future research
The work described in this paper has presented our experienceabout developing a surveillance system using WSNs forpractical applications and evaluating their deployment inthe real world A mechanism for controlling virtualperimeters using WSN that manage mobile nodes in a specificenvironment has been proposed A deployment mechanismhas been used in order to guarantee effective detection andan efficient use of motes which operate in a low powerconsumption mode in periods when events are not receivedIn addition the lsquointelligencersquo of the agent has been distributedby using mobile nodes to discern who has caused the eventof presence the client the sanatorium staff or the intruderMoreover our system has the capacity to detect more than oneauthorized person crossing the perimeter since the system isbased on intelligent distribution supported by mobile nodesThis characteristic contributes in saving both processingresources and power consumption
The deployment of this solution results in cost savingsbecause cables are not required during installation Therefore
9
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
this kind of deployment could become more spatially densethan traditional approaches Currently those mechanisms playan important role in building confidence in our environment toensure safety becoming key elements for preventing multipletypes of threats and allowing better quality of life for humans
As future research the manner how to integrate theagent in the formation of dynamic surveillance of virtualperimeters in runtime will be studied Advanced context-aware applications could be developed from this improvement(eg from livestock control to baggage logistics) It isa research challenge which could be solved by designingmulti-sensorial surveillance systems that combine differentdata sources from diverse positional sensors (eg ultrasonictransducer stereo vision laser triangulation)
Acknowledgments
The work presented in this research paper has been partiallyfunded by the VI Framework Programme of the EuropeanUnion within the μSWN lsquoSolving Major Problems in Microsensorial Wireless Networksrsquo project (code TSI-034642)The authors would like to thank the anonymous reviewersfor their valuable comments
References
[1] Garcıa-Hernandez C F Ibarguengoytia-Gonzalez P HGarcıa-Hernandez J and Perez-Dıaz J A 2007 Wirelesssensor networks and applications a survey Int J ComputSci Netw Secur 7 270
[2] Garcia M L 2008 Design and Evaluation of PhysicalProtection Systems (Portsmouth NHButterworth-Heinemann) pp 86ndash8
[3] Garcıa A B Martınez J F Lopez J M Prayati A and RedondoL 2008 Problem Solving for Wireless Sensor Networks(Computer Communications and Network Series)(London Springer) pp 177ndash207
[4] Bounabat B Romadi R and Labhalla S 1999 Designingmulti-agent reactive systems a specification method based
on reactive decisional agents Approaches to IntelligenceAgents (Berlin Springer) p 775
[5] Romadi R and Berbia H 2008 Wireless sensor network aspecification method based on reactive decisional agents3rd Int Conf on Information and CommunicationTechnologies From Theory to Applications (ICTTA 2008)pp 1ndash5
[6] Frantisek Z Jr and Frantisek Z 2008 Simulation for wirelesssensor networks with intelligent nodes 10th Int Conf onComputer Modeling and Simulation (UKSIM 2008)pp 746ndash51
[7] Wang X Bi D-W Ding L and Wang S 2007 Agentcollaborative target localization and classification WirelSensor Netw Sensors 7 1359ndash86
[8] Rogers A Corkill D D and Jennings N R 2009 Agenttechnologies for sensor networks Intell Syst IEEE24 13ndash7
[9] Byunghun S Haksoo Ch and Hyung S L 2008 Surveillancetracking system using passive infrared motion sensors inwireless sensor network Int Conf on InformationNetworking (ICOIN 2008) pp 1ndash5
[10] Li Y Y and Parker L 2008 Intruder detection using a wirelesssensor network with an intelligent mobile robot responseProc IEEE SoutheastCon (Huntsville AL USA) pp 37ndash42
[11] Zappi P Farella E and Benini L 2007 Enhancing the spatialresolution of presence detection in a PIR based wirelesssurveillance network IEEE Conf on Advanced Video andSignal Based Surveillance (AVSS 2007) pp 295ndash300
[12] Singh J Madhow U Kumar R Suri S and Cagley R 2007Tracking multiple targets using binary proximity sensorsProc 6th Int Conf on Information Processing in SensorNetworks (IPSN rsquo07) (Cambridge MA USA) (New YorkACM) pp 529ndash38
[13] Moghavvemi M and Lu Ch S 2004 Pyroelectric infraredsensor for intruder detection TENCON 2004 IEEE Region10 Conf vol 4 pp 656ndash9
[14] Boonma P and Suzuki J 2009 Toward interoperablepublishsubscribe communication between sensor networksand access networks IEEE Consumer Communications andNetworking Conf pp 1ndash6
[15] Yuan Y L and Parker L E 2008 Detecting and monitoringtime-related abnormal events using a wireless sensornetwork and mobile robot IEEE RSJ Int Conf onIntelligent Robots and Systems (IROS 2008) pp 3292ndash8
10

Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Table 1 Characteristics of the Luminite TX50040 PIR detector
Items Datasheet
Detection distance 40 mField of view 1
Supply voltage 9 V from PP3Consumption in stand-by mode 9 μATemperature range minus10 + 50 C
them to integrate with the environment easily However noprevious works using an intruder detection system throughcooperation with mobile sensor nodes have ever been appliedAs far as is known there are no companies providing this typeof application Otherwise specialized companies (CrossbowTechnologies1 Sentilla2 Libelium3) offering hardware fordesigning and deploying similar kinds of applications wouldbe offering such systems
3 Specification of the surveillance agent
This section describes the mechanism used by the vpSA forthe detection of intruders as well as its architectonic andfunctional description Moreover the selected middleware thatallows deployment of the agent and provides basic servicessuch as communication support is outlined
Presence detection mechanisms are used in cases where aperimeter has not been physically defined or when a perimeteris not visible to people for security reasons Thus presencedetection systems generate an invisible barrier around theperimeter and perform actions when the perimeter is alteredin order to prevent intrusions In the following section thefeatures of the sensors used for detecting intrusions at theperimeter are described
31 Characterization of passive infrared sensors
PIR sensors are pyroelectric devices They can be used fordetecting movements by means of changes in temperatureemitted by objects inside the marked area Treatment ofPIR sensor data is simpler than those implemented by amicrophone ultrasound or other visual means and contrastThey do not require any device or object detection signalPIR sensors have proven performance and are inexpensiveand easy to integrate with other systems [12] Thus they arewidely applied in alarm systems lighting controlled by motionand robotics applications such as intrusion detection [13]
For this study a Luminite TX50040 passive infraredsensor has been used4 This provides a detection range ofup to 40 times 1 (see table 1) The TX50040 PIR sensor is forlong-range narrow applications being suitable for perimeterprotection A 9 V lithium PP3 battery powers this PIR
1 Crossbow Corporation Inc (available at httpwwwxbowcom)2 Sentilla Corporation (available at httpwwwsentillacom)3 Libelium Comunicaciones Distribuidas SL (available athttpwwwlibeliumcom)4 Luminite Electronics Ltd (available at httpwwwluminitecoukproductpagephpWEBYEP DI=301)
32 Middleware
As was presented in previous sections the vpSA approachis based on agent paradigm This technology requires spacefor interpretation storage and control commonly known aslsquoagent platformrsquo Agent platforms are standardized by theFoundation for Intelligent Physical Agents (FIPA)5 Thisplatform provides different services such as communicationamong agents reactivity and behaviour In order to providesupport for deployment of the agent in the sensor nodeslightweight software has been used in order to provideabstraction from the underlying sensor platform heterogeneityand communication at a network level by means of anapplication programming interface (API) In this manner aμSMS (micro subscription management system) middlewareapproach has been developed in the framework of the μSWNResearch Project6
The main reason for using μSMS middleware abstractionis its ease for providing deployment of agent-basedservices over resource-constraint devices Among thesefeatures we can emphasize the development of lightweightcomponent-based services as well as the event-drivenpublishsubscribe communication paradigm On the onehand the publishsubscribe interaction model is widelyapplied in WSNs because it offers an asynchronous interactionmodel between components The components are notifiedwhen an event of interest is generated without havingto continuously poll the data source This enhances thedecoupling between information producers and consumerswhile minimizing energy consumption [14] Moreover thisarchitecture uses the middleware components paradigm forservice creation The use of these components offers severaladvantages to software engineering These advantages includeindependence (low coupling between architecture pieces)interoperability (by means of well-specified service interfacecontract) and reusability (business logic of the componentsis properly encapsulated) Considering μSMS proposal theinterface of each component is very compact That meansthe minimum required methods for controlling the lifecycle ofeach component (see section 33) and the minimum to interactwith the rest of the architecture by using an underlying event-based model have been defined This allows the frameworksubsystem to schedule the components in a low-consumptionmode in order to increase the autonomy of the sensor nodes
At this point μSMS architecture can be seen as a multi-agent platform for enriched service composition on WSNsThis middleware approach provides support for the exchangeof information between sensor nodes in a lightweight mannerwhich is a cornerstone in embedded computing devices suchas WSN6 Figure 1 illustrates the core components diagramof the architecture where the vpSA is deployed
The description of the main elements of the μSMSarchitecture is as follows
Resources This middleware component is responsiblefor controlling hardware resources of the nodes Its main
5 Foundation for Intelligent Physical Agents (available athttpwwwfipaorgspecsfipa00023indexhtml)6 μSWN Solving Major Problems in Micro Sensorial Networks (IST-034642) European FP6 Project Site wwwuswneujindexphp
3
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 1 Overview of the μSMS middleware architecture
functions include management of timers LEDs DAC(digital to analogue converter) ADC (analogue to digitalconverter) GPIO (general purpose IO) and batteriesamong othersSubscriber This middleware component represents thekernel of the publishsubscribe system It providespublication and subscription capabilities to the rest ofthe components in the architecture In this manner thesubscriber allows the application agents to exchange datawith the agents deployed in the rest of the network nodesthrough eventing serviceCommunication This middleware component isresponsible for sending and receiving data events in thesensor network It uses the services offered by the NPL(network protocol layer) subsystem offering the rest ofthe architecture a well-defined interface to support theinter-node communicationFramework This middleware subsystem is responsiblefor managing the lifecycle of the component and agentsin the nodes The main task of the framework subsystemis the execution scheduling of the components that areinstantiated in the nodesHardware abstraction layer (HAL) This subsystemallows taking advantage of the resources of the sensornodes by isolating the application agents from theunderlying hardware heterogeneity Thus using theservices offered by HAL the resources componentprovides a uniform interface to access the physical nodecapabilitiesNetwork protocol layer (NPL) This subsystem encapsu-lates the low-level radio communication protocols Itsobjective is to decouple the middleware of the specificused routing scheme features using a stratified approachCommunication component wraps in order to provide acommon interface with independence from the specific
implementation applied in the NPL The following sub-sections explain the technical details of the physical MACand routing protocol layers that have been used
321 Physical and MAC layers This approach is based onIEEE Std 802154-2006 which specifies a standard protocolstack widely used in a low-rate wireless personal area network(LR-WPAN) IEEE 802154 protocol stack defines a physical(PHY) layer and a medium access control (MAC) layer ThePHY layer operates at 868 MHz (11 radio channels 20 kbps)915 MHz (11 radio channels 40 kbps) and 24 GHz (16radio channels 250 kbps) frequency bands with a wirelesstransmission range up to 100 m The IEEE 802154 MAClayer uses a CSMA-CA (carrier sense multiple access-collisionavoidance) algorithm to detect and avoid collisions in a sharedtransmission medium offering a guaranteed time slot (GTS) asthe optional mechanism This feature is focused on allocating aspecific duration within a superframe structure in order to offerlow latency for user applications with real-time requirements
322 Routing protocol ZigBee specification 2006networking technology has been considered in this approachIt is an IEEE 802154-based protocol stack aiming to achievelow cost and low power consumption in resource constraintand embedded devices This standard defines over anIEEE 802154 MAC layer a network (NWK) layer and anapplication support (APS) layer The NWK layer implementsthe routing protocol which offers multi-hop communicationsupport for several networking topologies including starcluster tree and mesh the latest has been used in our WSNdeployment Moreover confidentiality service is provided bythis routing scheme using 128 bits symmetric cryptographyfor the advanced encryption service (AES) protocol TheAPS layer is over NWK in order to offer a set of generalfunctionalities such as services of binding and discovery
33 Agent properties
The most important properties of the proposed vpSA are asfollows
Agent status It describes the necessary information todistinguish between two agents of the same type Thestate is mainly affected by the agent inputs which aredata acquired by the sensors and information from otheragentsAgent behaviour It defines the agentrsquos ability to react to aspecific execution condition based on the perception andaction taken previously Thus the agent makes decisionsaccording to the event detected by the sensorsCommunication capabilities vpSA has interactioncapabilities among nodes through the agent middlewareplatform provided by the μSMS abstraction Aspreviously mentioned it offers agents support to interactwith other actors through publishsubscribe paradigmusing an event-driven communication modelAutonomy vpSA performs its task without interventionfrom humans or other agents through orders andorqueries The agent is interested in a specific event
4
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 2 State diagram of the fixed nodes
so when this event occurs the agent executes thecorresponding action This procedure implies thatagents running on the mobile node wake up from alow power consumption mode and consequently performcorresponding functions automaticallyCommon objectives Both in the fixed and mobile nodesagents perform a set of specific tasks They interact toachieve common lsquodetecting presencersquo goalLifecycle The agent has capacity of being lsquobornrsquo when itis developed and activated to lsquoliversquo while it is operationalto lsquoclonersquo itself by distributing its knowledge over mobilenodes in order to fulfil its main objective and to lsquodiersquowhen it is unloaded from the node
34 Surveillance agent roles
Agents have been installed in two types of sensor nodes lsquofixednodesrsquo and lsquomobile nodesrsquo Fixed nodes are used for makingthe virtual perimeter and lsquomobile nodesrsquo are used for detectingclients and assistant staff The main agent functionalities inthese nodes are as follows
341 Fixed nodes The virtual perimeter is made up of fixednodes These nodes are equipped with PIR sensors which candetect any motion from people crossing the perimeter Thefixed nodes distinguish clients assistant staff and intrudersThis information is then sent to the sink node and fromthere to the security staff of the sanatorium via WiFi Allthe collected information is stored in a database
342 Mobile nodes The clients and assistant staff areequipped with this kind of node The nodes send a signalidentifying themselves when a fixed node of the virtualperimeter makes a request They have a business logic thatallows collaborating with the fixed nodes to discern the typeof intrusion (ie authorized or unauthorized)
35 Surveillance agent functions
The main design goals of the vpSA are as follows
bull Detection of access to the perimeter of clients identifyingsanatorium staff or intruders passing through the area
bull Alarm indication directed to sanatorium securitypersonnel reporting that an unauthorized person hascrossed the perimeter
351 Agent functions in the fixed nodes As shown infigure 2 vpSA located in the fixed nodes remains in a lowpower consumption mode until the virtual perimeter is crossedOnce the agent receives an lsquoaltered infrared sensorrsquo eventthe identification of its neighbours will be requested Ifthere are mobile nodes in this area they have to respondwith their identification to the fixed node so it can informbracelet identification to the security personnel and determinethe lsquobracelet presencersquo event Otherwise if an intruder hasaltered the perimeter the fixed node will process an alarmof lsquointruder presencersquo and inform the security staff Theperiod of time between the request for identification and itscorresponding response depends mainly on the time requiredbetween the sensor nodes (fixed and mobile) to communicateand exchange such events In any case the time is not morethan 3 s for the fixed nodes and 2 s for the mobile nodes
352 Agent functions in the mobile nodes The vpSAlocated in the mobile nodes remains in a low powerconsumption mode until an identification request event isreceived from the fixed node (perimeter node) Once theagent receives a lsquorequest identificationrsquo event it responds tothe perimeter node that has requested for it The time thattranspires is not more than 2 s The agent then returns to thelow-consumption mode
4 Implementation details
The vpSA has been deployed at the Versme Sanatorium inBirstonas (Lithuania) Two different types of nodes have beeninstalled fixed nodes that make up the virtual perimeter andmobile nodes (bracelets) that are worn by sanatorium patientsand authorized staff Messages are interchanged when thevirtual perimeter is crossed both by a bracelet or an intruder
Figure 3 shows the vpSA deployed in fixed nodes aspreviously subscribed to lsquoALTERED INFRARED SENSORrsquoevents This kind of event will be thrown by the Resources
5
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 3 Surveillance scenario lsquobracelet detectionrsquo use case
Figure 4 Surveillance scenario lsquointruder detectionrsquo use case
component of the μSMS middleware when the PIR sensor isexcited When a presence is detected the fixed node connectedto the PIR sensor generates a lsquoNODEID REQUESTrsquo externalpublication which will be delivered to the neighbouring nodesvia broadcast communication The bracelet node that crossesthe perimeter has to reply with a lsquoNODEID RESPONSErsquoexternal publication the fixed node will wait for the answerfrom the bracelet node for a short period of time (3 s) If thelsquoNODEID RESPONSErsquo event is received from the braceletnode the fixed mote will throw a lsquoBRACELET PRESENCErsquoevent containing the identification of the bracelet node thathas generated the presence in the perimeter Otherwise inthe case of intruder detection an lsquoINTRUDER PRESENCErsquoevent will be generated (see figure 4)
5 Validation scenario
In order to validate our approach in the real-worldenvironment a surveillance perimeter has been deployed atthe Versme Sanatorium in Birstonas (Lithuania) as shown infigure 5 This sanatorium is an establishment for specializedtreatment and recreation providing rehabilitation supportrehabilitation ambulatory rehabilitation and sanatoriumtreatment services
A WSN has been deployed using fixed nodes to markthe virtual perimeter on the external part of the sanatoriumwhich is 810 m long In order to enable the mechanism ofidentification in the fixed nodes a bracelet (mobile node) isassigned to every patient and assistant staff at the sanatorium
6
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 5 Virtual perimeter in sanatorium
During the evaluation 14 patients each wearing a braceletwere supervized by 5 assistant staff The bracelets are madeof Crossbow TelosB nodes (so-called motes) that integrateadditional biomedical sensors in order to spread their capacityof sensing data such as heart rate body temperature andhumidity In some particular cases the sanatorium staff willuse a PDA to receive presence events from the perimeterWhen an intruder is detected inside the perimeter the fixednode alerts the security staff by reporting the type of intrusionwhich could have been generated by a client or by an intruderThe personnel will then have to confirm the event and makedecision accordingly The data about the event are saved in adatabase for further analysis and consultation
Figure 5 shows the fixed nodes deployed around thesanatorium perimeter represented by dots They containPIR sensors which are used to detect the presence of peoplecrossing the perimeter
The virtual perimeter is made up of 50 TelosB mote sensorplatforms and used as implementation target Because ofproject cost constraints a sub-perimeter has been selected inorder to deploy the validation scenario Only 16 nodes from50 needed to cover the complete perimeter were used In thenext stage of the project the perimeter will be completelycovered by deploying 34 more nodes In the TelosB platforma sensor board can be plugged into each sensor node (mote)in order to carry out several environment readings includinglight temperature humidity infrared etc The deployedTelosB runs on two AA batteries with a lifespan thatdepends on communication use and computation resourcesCommunications within a 75ndash100 m outdoor range varygreatly under environmental conditions as can be observedin the datasheet The motes run the TinyOS operating systemsand are equipped with 48 kB of flash memory and 10 kB ofRAM memory IEEE 802154-compliant radio Moreover
these nodes are equipped with infrared sensors (LUMINITETX50040)
51 Deployment requirements
In the preliminary tests it was identified that the same physicalevent was detected by two or more nodes generating alarmsin places where incursions were not carried out This was dueto the overlapping of motes coverage ratio inside the detectionarea In other words two motes shared part of their detectionarea
Hence it was also determined that the deployment of fixednodes considers the intersection range of the infrared sensorsThis intersection area just involves two consecutive fixed nodesthat take part of the surveillance perimeter Thus it has beenguaranteed that the bracelet will only respond to those fixednodes involved in the sector where it has crossed It therebyreduces false alarms Two major requirements are necessaryin order to enable a proper detection of people wearingbracelets the two nodes involved in a perimeter sector haveto be deployed within the maximum PIR detection distancebetween them (40 m) and their PIRs must be accuratelybrought face to face This ideal scenario is illustrated infigure 6
As a validation requirement multi-hop radio configura-tion has been validated Network deployment was designedso as not to exceed five hops between sensor nodes and sinknode In order to set this scenario up both physical locationof sensor nodes and strength of their radio signal were takeninto account
52 Validation results
It took a period of 8 days to carry out the tests During thistime both intrusion and authorized (identified by bracelets)incursions through the perimeter were generated Figure 7illustrates the alarm generated on the application of the securitystaff once the perimeter has been violated The WSN-CAD surveillance application graphically shows two kindsof perimeter crossings performed by a bracelet (authorizedaccess) and intruder
In this period the energy consumption of the hardwarecomponents making up the virtual perimeter surveillance hasbeen determined
This study was focused on calculating the autonomy of oursurveillance system paying special attention to the perimeternodes since replacing their batteries is a bit difficult they areusually hung from lampposts or similar places that are noteasily accessible Such a problem for mobile nodes does notoccur since they are completely accessible to users
As previously mentioned TelosB motes and LuminiteTX50040 PIRs are the two main hardware components of theperimeter nodes Luminite TX50040 PIRs are connected toTelosB motes through their GPIO pins Each of those hardwareelements has its own energetic characteristics (see tables 2and 3) so consumption calculations have to be performedindependently
In order to calculate the autonomy of both TelosB moteand Luminite TX500 PIR according to the generated events
7
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 6 PIR sensor deployment conditions
Figure 7 WSN-CAD surveillance application
Table 2 Consumption of hardware execution modes
Hardware Execution Currentcomponent mode consumption
TelosB mote Tx mode (0 dBm) 253 mARx mode 23 mAIdle mode 21 μA
Luminite Stand-by mode 9 μATX50040 PIR Alarm mode 20 mA
of presence during validation (see table 4) let us considera balanced distribution of those events of presence betweennodes that make up the virtual perimeter In this manner 42events of presence are counted in total (per day and node)of which 13 events are of INTRUDER PRESENCE and 29events are of BRACELET PRESENCE
Table 3 Battery supply for hardware components
Hardwarecomponent Battery Battery features
TelosB mote 4xAA (redesignedmotes)
Lithium rechargeable15 V 2900 mAh
LuminiteTX50040 PIR
1xPP3 Lithium 9 V 230 mAh
Table 4 System validation results
Use case
Classification Bracelet Intruder
True positive (tp) 4277 1125False positive (fp) 17 8False negative (fn) 0 0
521 Luminite TX50040 PIR autonomy analysis Whena Luminite TX50040 PIR is excited because of a perimetercrossing the PIR hardware turns from lsquostand byrsquo mode tolsquoalarmrsquo mode The lsquoalarm modersquo of Luminite TX50040 PIRactivates for 3 s every time it is excited The PIR therebyworks in that mode almost 1 min per day consuming 092 mAhaccording to energy data shown in tables 2 and 3 Thereforethe Luminite TX50040 PIR can autonomously work for 251days it is equivalent to detecting approximately 10 542 eventsof presence
522 TelosB mote autonomy analysis Every time fixednodes process an event of presence TelosB motes needto send two messages via radio (see figure 2) first aNODEID REQUEST publication and second a PRESENCEevent to identify the kind of detected presence Eventually ifa NODEID RESPONSE event is received from a braceletthen a BRACELET PRESENCE event is thrown to thegateway otherwise an INTRUDER PRESENCE event isthrown The node has to switch the RF transceiver onfor 8 ms in order to transmit the two necessary messages(NODEID REQUEST and PRESENCE event) and 43 ms
8
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
to receive a NODEID RESPONSE event if needed Takinginto account the TelosB mote energy characteristics as shownin tables 2 and 3 the mote consumption is 4371 mAhper day Originally TelosB mote was equipped with 2AA batteries but fixed TelosB motes were redesigned inorder to increase their autonomy by enabling two more AAbatteries From the consumption per day previously obtainedfixed TelosB motes making up the virtual perimeter canthereby autonomously work for 265 days this is equivalentto transmitting approximately 11 130 events of presence
53 Performance evaluation
In this section experimental results that evaluate theperformance of the surveillance-agent system based on WSNsdescribed in the previous section are presented
Table 4 shows the results obtained during systemvalidation The results are classified into three categoriesThe first set of results true positive (tp) refers to those eventsproperly discerned by the node indicating who crossed theperimeter During the validation test 4277 bracelets and 1125intruders were detected as true positive (ie bracelet nodes andintruders respectively)
The second set of results false positive (fp) indicates that(1) 17 bracelet accesses were detected as intruder and (2) 8intruder accesses were detected as bracelet In the case of (1)it has been concluded that the false positive was caused by adeficient radio signal of either fixed node or of the bracelet(eg reflections attenuations and interferences) which didnot allow proper communication among bracelets and fixednodes It is then not possible to exchange messages thatallow identification of the mobile node In order to avoidthis situation the characteristics of deployment in order tooptimize the performance of the PIRs have been modified Inthe case of (2) false positive was due to an intruder crossingthe perimeter when there was a bracelet in the radio coveragearea of the fixed node
Finally false negative (fn) represents those events ofpresence that occurred inside the perimeter and that were notdetected by the node False negative was 0 as in all casesan alarm was generated when the perimeter was crossed byeither an intruder or a bracelet
According to the data shown in table 4 the performancemetrics defined in [15] have been adapted in order to determineboth precision and recall of the system
In the context of this work precision indicates thepercentage of detections properly classified from the totaldetections Specifically precision is the number of truepositives divided by the total number of elements labelledas belonging to the positive class Thus precision is obtainedby applying (1) that corresponds to 99 which indicates thatthe system has a high degree of precision This rate has beenachieved through collaborating fixed nodes with mobile nodes
precision = tp
tp + fp (1)
Regarding recall it indicates the number of eventscorrectly detected from those that should have been detectedHence the number of detected events of presence from the total
occurred presence has been obtained by applying expression(2) which corresponds to 1 That has been so due todeployment as explained in section 51 that allowed notonly the detection of every unauthorized crossing which isthe major goal of our surveillance-agent system but also thedetection of every perimeter intrusion from authorized staffand patient crossings
recall = tp
tp + f n (2)
54 Lessons learned
The work described in this paper is our experience with apervasive surveillance agent based on WSNs in a practicalapplication and its evaluation through an actual deploymentof motes Several lessons have been learnt from the workperformed in this research which can be applied to makingdecisions during the development of a system related topervasive surveillance The following points are someremarks that could be useful to future researchers involvedin the development and management of pervasive surveillancesystems based on WSNs
bull The sensors for deployment have to be chosen consideringthe characteristics of coverage to be modelled
bull The geographical factors of the place that will bemonitored for the detection of intrusions have to be takeninto account
bull The number of required sensors has to be calculatedin order to guarantee the expected security level fromthe sensed spatial density and the critical level of themonitored area
bull The set of information which is extracted from datathat is generated by the agent allows determiningthe weaknesses of the coverage area and discoveringvulnerabilities for hypothetical intrusion paths
6 Conclusions and future research
The work described in this paper has presented our experienceabout developing a surveillance system using WSNs forpractical applications and evaluating their deployment inthe real world A mechanism for controlling virtualperimeters using WSN that manage mobile nodes in a specificenvironment has been proposed A deployment mechanismhas been used in order to guarantee effective detection andan efficient use of motes which operate in a low powerconsumption mode in periods when events are not receivedIn addition the lsquointelligencersquo of the agent has been distributedby using mobile nodes to discern who has caused the eventof presence the client the sanatorium staff or the intruderMoreover our system has the capacity to detect more than oneauthorized person crossing the perimeter since the system isbased on intelligent distribution supported by mobile nodesThis characteristic contributes in saving both processingresources and power consumption
The deployment of this solution results in cost savingsbecause cables are not required during installation Therefore
9
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
this kind of deployment could become more spatially densethan traditional approaches Currently those mechanisms playan important role in building confidence in our environment toensure safety becoming key elements for preventing multipletypes of threats and allowing better quality of life for humans
As future research the manner how to integrate theagent in the formation of dynamic surveillance of virtualperimeters in runtime will be studied Advanced context-aware applications could be developed from this improvement(eg from livestock control to baggage logistics) It isa research challenge which could be solved by designingmulti-sensorial surveillance systems that combine differentdata sources from diverse positional sensors (eg ultrasonictransducer stereo vision laser triangulation)
Acknowledgments
The work presented in this research paper has been partiallyfunded by the VI Framework Programme of the EuropeanUnion within the μSWN lsquoSolving Major Problems in Microsensorial Wireless Networksrsquo project (code TSI-034642)The authors would like to thank the anonymous reviewersfor their valuable comments
References
[1] Garcıa-Hernandez C F Ibarguengoytia-Gonzalez P HGarcıa-Hernandez J and Perez-Dıaz J A 2007 Wirelesssensor networks and applications a survey Int J ComputSci Netw Secur 7 270
[2] Garcia M L 2008 Design and Evaluation of PhysicalProtection Systems (Portsmouth NHButterworth-Heinemann) pp 86ndash8
[3] Garcıa A B Martınez J F Lopez J M Prayati A and RedondoL 2008 Problem Solving for Wireless Sensor Networks(Computer Communications and Network Series)(London Springer) pp 177ndash207
[4] Bounabat B Romadi R and Labhalla S 1999 Designingmulti-agent reactive systems a specification method based
on reactive decisional agents Approaches to IntelligenceAgents (Berlin Springer) p 775
[5] Romadi R and Berbia H 2008 Wireless sensor network aspecification method based on reactive decisional agents3rd Int Conf on Information and CommunicationTechnologies From Theory to Applications (ICTTA 2008)pp 1ndash5
[6] Frantisek Z Jr and Frantisek Z 2008 Simulation for wirelesssensor networks with intelligent nodes 10th Int Conf onComputer Modeling and Simulation (UKSIM 2008)pp 746ndash51
[7] Wang X Bi D-W Ding L and Wang S 2007 Agentcollaborative target localization and classification WirelSensor Netw Sensors 7 1359ndash86
[8] Rogers A Corkill D D and Jennings N R 2009 Agenttechnologies for sensor networks Intell Syst IEEE24 13ndash7
[9] Byunghun S Haksoo Ch and Hyung S L 2008 Surveillancetracking system using passive infrared motion sensors inwireless sensor network Int Conf on InformationNetworking (ICOIN 2008) pp 1ndash5
[10] Li Y Y and Parker L 2008 Intruder detection using a wirelesssensor network with an intelligent mobile robot responseProc IEEE SoutheastCon (Huntsville AL USA) pp 37ndash42
[11] Zappi P Farella E and Benini L 2007 Enhancing the spatialresolution of presence detection in a PIR based wirelesssurveillance network IEEE Conf on Advanced Video andSignal Based Surveillance (AVSS 2007) pp 295ndash300
[12] Singh J Madhow U Kumar R Suri S and Cagley R 2007Tracking multiple targets using binary proximity sensorsProc 6th Int Conf on Information Processing in SensorNetworks (IPSN rsquo07) (Cambridge MA USA) (New YorkACM) pp 529ndash38
[13] Moghavvemi M and Lu Ch S 2004 Pyroelectric infraredsensor for intruder detection TENCON 2004 IEEE Region10 Conf vol 4 pp 656ndash9
[14] Boonma P and Suzuki J 2009 Toward interoperablepublishsubscribe communication between sensor networksand access networks IEEE Consumer Communications andNetworking Conf pp 1ndash6
[15] Yuan Y L and Parker L E 2008 Detecting and monitoringtime-related abnormal events using a wireless sensornetwork and mobile robot IEEE RSJ Int Conf onIntelligent Robots and Systems (IROS 2008) pp 3292ndash8
10

Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 1 Overview of the μSMS middleware architecture
functions include management of timers LEDs DAC(digital to analogue converter) ADC (analogue to digitalconverter) GPIO (general purpose IO) and batteriesamong othersSubscriber This middleware component represents thekernel of the publishsubscribe system It providespublication and subscription capabilities to the rest ofthe components in the architecture In this manner thesubscriber allows the application agents to exchange datawith the agents deployed in the rest of the network nodesthrough eventing serviceCommunication This middleware component isresponsible for sending and receiving data events in thesensor network It uses the services offered by the NPL(network protocol layer) subsystem offering the rest ofthe architecture a well-defined interface to support theinter-node communicationFramework This middleware subsystem is responsiblefor managing the lifecycle of the component and agentsin the nodes The main task of the framework subsystemis the execution scheduling of the components that areinstantiated in the nodesHardware abstraction layer (HAL) This subsystemallows taking advantage of the resources of the sensornodes by isolating the application agents from theunderlying hardware heterogeneity Thus using theservices offered by HAL the resources componentprovides a uniform interface to access the physical nodecapabilitiesNetwork protocol layer (NPL) This subsystem encapsu-lates the low-level radio communication protocols Itsobjective is to decouple the middleware of the specificused routing scheme features using a stratified approachCommunication component wraps in order to provide acommon interface with independence from the specific
implementation applied in the NPL The following sub-sections explain the technical details of the physical MACand routing protocol layers that have been used
321 Physical and MAC layers This approach is based onIEEE Std 802154-2006 which specifies a standard protocolstack widely used in a low-rate wireless personal area network(LR-WPAN) IEEE 802154 protocol stack defines a physical(PHY) layer and a medium access control (MAC) layer ThePHY layer operates at 868 MHz (11 radio channels 20 kbps)915 MHz (11 radio channels 40 kbps) and 24 GHz (16radio channels 250 kbps) frequency bands with a wirelesstransmission range up to 100 m The IEEE 802154 MAClayer uses a CSMA-CA (carrier sense multiple access-collisionavoidance) algorithm to detect and avoid collisions in a sharedtransmission medium offering a guaranteed time slot (GTS) asthe optional mechanism This feature is focused on allocating aspecific duration within a superframe structure in order to offerlow latency for user applications with real-time requirements
322 Routing protocol ZigBee specification 2006networking technology has been considered in this approachIt is an IEEE 802154-based protocol stack aiming to achievelow cost and low power consumption in resource constraintand embedded devices This standard defines over anIEEE 802154 MAC layer a network (NWK) layer and anapplication support (APS) layer The NWK layer implementsthe routing protocol which offers multi-hop communicationsupport for several networking topologies including starcluster tree and mesh the latest has been used in our WSNdeployment Moreover confidentiality service is provided bythis routing scheme using 128 bits symmetric cryptographyfor the advanced encryption service (AES) protocol TheAPS layer is over NWK in order to offer a set of generalfunctionalities such as services of binding and discovery
33 Agent properties
The most important properties of the proposed vpSA are asfollows
Agent status It describes the necessary information todistinguish between two agents of the same type Thestate is mainly affected by the agent inputs which aredata acquired by the sensors and information from otheragentsAgent behaviour It defines the agentrsquos ability to react to aspecific execution condition based on the perception andaction taken previously Thus the agent makes decisionsaccording to the event detected by the sensorsCommunication capabilities vpSA has interactioncapabilities among nodes through the agent middlewareplatform provided by the μSMS abstraction Aspreviously mentioned it offers agents support to interactwith other actors through publishsubscribe paradigmusing an event-driven communication modelAutonomy vpSA performs its task without interventionfrom humans or other agents through orders andorqueries The agent is interested in a specific event
4
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 2 State diagram of the fixed nodes
so when this event occurs the agent executes thecorresponding action This procedure implies thatagents running on the mobile node wake up from alow power consumption mode and consequently performcorresponding functions automaticallyCommon objectives Both in the fixed and mobile nodesagents perform a set of specific tasks They interact toachieve common lsquodetecting presencersquo goalLifecycle The agent has capacity of being lsquobornrsquo when itis developed and activated to lsquoliversquo while it is operationalto lsquoclonersquo itself by distributing its knowledge over mobilenodes in order to fulfil its main objective and to lsquodiersquowhen it is unloaded from the node
34 Surveillance agent roles
Agents have been installed in two types of sensor nodes lsquofixednodesrsquo and lsquomobile nodesrsquo Fixed nodes are used for makingthe virtual perimeter and lsquomobile nodesrsquo are used for detectingclients and assistant staff The main agent functionalities inthese nodes are as follows
341 Fixed nodes The virtual perimeter is made up of fixednodes These nodes are equipped with PIR sensors which candetect any motion from people crossing the perimeter Thefixed nodes distinguish clients assistant staff and intrudersThis information is then sent to the sink node and fromthere to the security staff of the sanatorium via WiFi Allthe collected information is stored in a database
342 Mobile nodes The clients and assistant staff areequipped with this kind of node The nodes send a signalidentifying themselves when a fixed node of the virtualperimeter makes a request They have a business logic thatallows collaborating with the fixed nodes to discern the typeof intrusion (ie authorized or unauthorized)
35 Surveillance agent functions
The main design goals of the vpSA are as follows
bull Detection of access to the perimeter of clients identifyingsanatorium staff or intruders passing through the area
bull Alarm indication directed to sanatorium securitypersonnel reporting that an unauthorized person hascrossed the perimeter
351 Agent functions in the fixed nodes As shown infigure 2 vpSA located in the fixed nodes remains in a lowpower consumption mode until the virtual perimeter is crossedOnce the agent receives an lsquoaltered infrared sensorrsquo eventthe identification of its neighbours will be requested Ifthere are mobile nodes in this area they have to respondwith their identification to the fixed node so it can informbracelet identification to the security personnel and determinethe lsquobracelet presencersquo event Otherwise if an intruder hasaltered the perimeter the fixed node will process an alarmof lsquointruder presencersquo and inform the security staff Theperiod of time between the request for identification and itscorresponding response depends mainly on the time requiredbetween the sensor nodes (fixed and mobile) to communicateand exchange such events In any case the time is not morethan 3 s for the fixed nodes and 2 s for the mobile nodes
352 Agent functions in the mobile nodes The vpSAlocated in the mobile nodes remains in a low powerconsumption mode until an identification request event isreceived from the fixed node (perimeter node) Once theagent receives a lsquorequest identificationrsquo event it responds tothe perimeter node that has requested for it The time thattranspires is not more than 2 s The agent then returns to thelow-consumption mode
4 Implementation details
The vpSA has been deployed at the Versme Sanatorium inBirstonas (Lithuania) Two different types of nodes have beeninstalled fixed nodes that make up the virtual perimeter andmobile nodes (bracelets) that are worn by sanatorium patientsand authorized staff Messages are interchanged when thevirtual perimeter is crossed both by a bracelet or an intruder
Figure 3 shows the vpSA deployed in fixed nodes aspreviously subscribed to lsquoALTERED INFRARED SENSORrsquoevents This kind of event will be thrown by the Resources
5
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 3 Surveillance scenario lsquobracelet detectionrsquo use case
Figure 4 Surveillance scenario lsquointruder detectionrsquo use case
component of the μSMS middleware when the PIR sensor isexcited When a presence is detected the fixed node connectedto the PIR sensor generates a lsquoNODEID REQUESTrsquo externalpublication which will be delivered to the neighbouring nodesvia broadcast communication The bracelet node that crossesthe perimeter has to reply with a lsquoNODEID RESPONSErsquoexternal publication the fixed node will wait for the answerfrom the bracelet node for a short period of time (3 s) If thelsquoNODEID RESPONSErsquo event is received from the braceletnode the fixed mote will throw a lsquoBRACELET PRESENCErsquoevent containing the identification of the bracelet node thathas generated the presence in the perimeter Otherwise inthe case of intruder detection an lsquoINTRUDER PRESENCErsquoevent will be generated (see figure 4)
5 Validation scenario
In order to validate our approach in the real-worldenvironment a surveillance perimeter has been deployed atthe Versme Sanatorium in Birstonas (Lithuania) as shown infigure 5 This sanatorium is an establishment for specializedtreatment and recreation providing rehabilitation supportrehabilitation ambulatory rehabilitation and sanatoriumtreatment services
A WSN has been deployed using fixed nodes to markthe virtual perimeter on the external part of the sanatoriumwhich is 810 m long In order to enable the mechanism ofidentification in the fixed nodes a bracelet (mobile node) isassigned to every patient and assistant staff at the sanatorium
6
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 5 Virtual perimeter in sanatorium
During the evaluation 14 patients each wearing a braceletwere supervized by 5 assistant staff The bracelets are madeof Crossbow TelosB nodes (so-called motes) that integrateadditional biomedical sensors in order to spread their capacityof sensing data such as heart rate body temperature andhumidity In some particular cases the sanatorium staff willuse a PDA to receive presence events from the perimeterWhen an intruder is detected inside the perimeter the fixednode alerts the security staff by reporting the type of intrusionwhich could have been generated by a client or by an intruderThe personnel will then have to confirm the event and makedecision accordingly The data about the event are saved in adatabase for further analysis and consultation
Figure 5 shows the fixed nodes deployed around thesanatorium perimeter represented by dots They containPIR sensors which are used to detect the presence of peoplecrossing the perimeter
The virtual perimeter is made up of 50 TelosB mote sensorplatforms and used as implementation target Because ofproject cost constraints a sub-perimeter has been selected inorder to deploy the validation scenario Only 16 nodes from50 needed to cover the complete perimeter were used In thenext stage of the project the perimeter will be completelycovered by deploying 34 more nodes In the TelosB platforma sensor board can be plugged into each sensor node (mote)in order to carry out several environment readings includinglight temperature humidity infrared etc The deployedTelosB runs on two AA batteries with a lifespan thatdepends on communication use and computation resourcesCommunications within a 75ndash100 m outdoor range varygreatly under environmental conditions as can be observedin the datasheet The motes run the TinyOS operating systemsand are equipped with 48 kB of flash memory and 10 kB ofRAM memory IEEE 802154-compliant radio Moreover
these nodes are equipped with infrared sensors (LUMINITETX50040)
51 Deployment requirements
In the preliminary tests it was identified that the same physicalevent was detected by two or more nodes generating alarmsin places where incursions were not carried out This was dueto the overlapping of motes coverage ratio inside the detectionarea In other words two motes shared part of their detectionarea
Hence it was also determined that the deployment of fixednodes considers the intersection range of the infrared sensorsThis intersection area just involves two consecutive fixed nodesthat take part of the surveillance perimeter Thus it has beenguaranteed that the bracelet will only respond to those fixednodes involved in the sector where it has crossed It therebyreduces false alarms Two major requirements are necessaryin order to enable a proper detection of people wearingbracelets the two nodes involved in a perimeter sector haveto be deployed within the maximum PIR detection distancebetween them (40 m) and their PIRs must be accuratelybrought face to face This ideal scenario is illustrated infigure 6
As a validation requirement multi-hop radio configura-tion has been validated Network deployment was designedso as not to exceed five hops between sensor nodes and sinknode In order to set this scenario up both physical locationof sensor nodes and strength of their radio signal were takeninto account
52 Validation results
It took a period of 8 days to carry out the tests During thistime both intrusion and authorized (identified by bracelets)incursions through the perimeter were generated Figure 7illustrates the alarm generated on the application of the securitystaff once the perimeter has been violated The WSN-CAD surveillance application graphically shows two kindsof perimeter crossings performed by a bracelet (authorizedaccess) and intruder
In this period the energy consumption of the hardwarecomponents making up the virtual perimeter surveillance hasbeen determined
This study was focused on calculating the autonomy of oursurveillance system paying special attention to the perimeternodes since replacing their batteries is a bit difficult they areusually hung from lampposts or similar places that are noteasily accessible Such a problem for mobile nodes does notoccur since they are completely accessible to users
As previously mentioned TelosB motes and LuminiteTX50040 PIRs are the two main hardware components of theperimeter nodes Luminite TX50040 PIRs are connected toTelosB motes through their GPIO pins Each of those hardwareelements has its own energetic characteristics (see tables 2and 3) so consumption calculations have to be performedindependently
In order to calculate the autonomy of both TelosB moteand Luminite TX500 PIR according to the generated events
7
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 6 PIR sensor deployment conditions
Figure 7 WSN-CAD surveillance application
Table 2 Consumption of hardware execution modes
Hardware Execution Currentcomponent mode consumption
TelosB mote Tx mode (0 dBm) 253 mARx mode 23 mAIdle mode 21 μA
Luminite Stand-by mode 9 μATX50040 PIR Alarm mode 20 mA
of presence during validation (see table 4) let us considera balanced distribution of those events of presence betweennodes that make up the virtual perimeter In this manner 42events of presence are counted in total (per day and node)of which 13 events are of INTRUDER PRESENCE and 29events are of BRACELET PRESENCE
Table 3 Battery supply for hardware components
Hardwarecomponent Battery Battery features
TelosB mote 4xAA (redesignedmotes)
Lithium rechargeable15 V 2900 mAh
LuminiteTX50040 PIR
1xPP3 Lithium 9 V 230 mAh
Table 4 System validation results
Use case
Classification Bracelet Intruder
True positive (tp) 4277 1125False positive (fp) 17 8False negative (fn) 0 0
521 Luminite TX50040 PIR autonomy analysis Whena Luminite TX50040 PIR is excited because of a perimetercrossing the PIR hardware turns from lsquostand byrsquo mode tolsquoalarmrsquo mode The lsquoalarm modersquo of Luminite TX50040 PIRactivates for 3 s every time it is excited The PIR therebyworks in that mode almost 1 min per day consuming 092 mAhaccording to energy data shown in tables 2 and 3 Thereforethe Luminite TX50040 PIR can autonomously work for 251days it is equivalent to detecting approximately 10 542 eventsof presence
522 TelosB mote autonomy analysis Every time fixednodes process an event of presence TelosB motes needto send two messages via radio (see figure 2) first aNODEID REQUEST publication and second a PRESENCEevent to identify the kind of detected presence Eventually ifa NODEID RESPONSE event is received from a braceletthen a BRACELET PRESENCE event is thrown to thegateway otherwise an INTRUDER PRESENCE event isthrown The node has to switch the RF transceiver onfor 8 ms in order to transmit the two necessary messages(NODEID REQUEST and PRESENCE event) and 43 ms
8
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
to receive a NODEID RESPONSE event if needed Takinginto account the TelosB mote energy characteristics as shownin tables 2 and 3 the mote consumption is 4371 mAhper day Originally TelosB mote was equipped with 2AA batteries but fixed TelosB motes were redesigned inorder to increase their autonomy by enabling two more AAbatteries From the consumption per day previously obtainedfixed TelosB motes making up the virtual perimeter canthereby autonomously work for 265 days this is equivalentto transmitting approximately 11 130 events of presence
53 Performance evaluation
In this section experimental results that evaluate theperformance of the surveillance-agent system based on WSNsdescribed in the previous section are presented
Table 4 shows the results obtained during systemvalidation The results are classified into three categoriesThe first set of results true positive (tp) refers to those eventsproperly discerned by the node indicating who crossed theperimeter During the validation test 4277 bracelets and 1125intruders were detected as true positive (ie bracelet nodes andintruders respectively)
The second set of results false positive (fp) indicates that(1) 17 bracelet accesses were detected as intruder and (2) 8intruder accesses were detected as bracelet In the case of (1)it has been concluded that the false positive was caused by adeficient radio signal of either fixed node or of the bracelet(eg reflections attenuations and interferences) which didnot allow proper communication among bracelets and fixednodes It is then not possible to exchange messages thatallow identification of the mobile node In order to avoidthis situation the characteristics of deployment in order tooptimize the performance of the PIRs have been modified Inthe case of (2) false positive was due to an intruder crossingthe perimeter when there was a bracelet in the radio coveragearea of the fixed node
Finally false negative (fn) represents those events ofpresence that occurred inside the perimeter and that were notdetected by the node False negative was 0 as in all casesan alarm was generated when the perimeter was crossed byeither an intruder or a bracelet
According to the data shown in table 4 the performancemetrics defined in [15] have been adapted in order to determineboth precision and recall of the system
In the context of this work precision indicates thepercentage of detections properly classified from the totaldetections Specifically precision is the number of truepositives divided by the total number of elements labelledas belonging to the positive class Thus precision is obtainedby applying (1) that corresponds to 99 which indicates thatthe system has a high degree of precision This rate has beenachieved through collaborating fixed nodes with mobile nodes
precision = tp
tp + fp (1)
Regarding recall it indicates the number of eventscorrectly detected from those that should have been detectedHence the number of detected events of presence from the total
occurred presence has been obtained by applying expression(2) which corresponds to 1 That has been so due todeployment as explained in section 51 that allowed notonly the detection of every unauthorized crossing which isthe major goal of our surveillance-agent system but also thedetection of every perimeter intrusion from authorized staffand patient crossings
recall = tp
tp + f n (2)
54 Lessons learned
The work described in this paper is our experience with apervasive surveillance agent based on WSNs in a practicalapplication and its evaluation through an actual deploymentof motes Several lessons have been learnt from the workperformed in this research which can be applied to makingdecisions during the development of a system related topervasive surveillance The following points are someremarks that could be useful to future researchers involvedin the development and management of pervasive surveillancesystems based on WSNs
bull The sensors for deployment have to be chosen consideringthe characteristics of coverage to be modelled
bull The geographical factors of the place that will bemonitored for the detection of intrusions have to be takeninto account
bull The number of required sensors has to be calculatedin order to guarantee the expected security level fromthe sensed spatial density and the critical level of themonitored area
bull The set of information which is extracted from datathat is generated by the agent allows determiningthe weaknesses of the coverage area and discoveringvulnerabilities for hypothetical intrusion paths
6 Conclusions and future research
The work described in this paper has presented our experienceabout developing a surveillance system using WSNs forpractical applications and evaluating their deployment inthe real world A mechanism for controlling virtualperimeters using WSN that manage mobile nodes in a specificenvironment has been proposed A deployment mechanismhas been used in order to guarantee effective detection andan efficient use of motes which operate in a low powerconsumption mode in periods when events are not receivedIn addition the lsquointelligencersquo of the agent has been distributedby using mobile nodes to discern who has caused the eventof presence the client the sanatorium staff or the intruderMoreover our system has the capacity to detect more than oneauthorized person crossing the perimeter since the system isbased on intelligent distribution supported by mobile nodesThis characteristic contributes in saving both processingresources and power consumption
The deployment of this solution results in cost savingsbecause cables are not required during installation Therefore
9
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
this kind of deployment could become more spatially densethan traditional approaches Currently those mechanisms playan important role in building confidence in our environment toensure safety becoming key elements for preventing multipletypes of threats and allowing better quality of life for humans
As future research the manner how to integrate theagent in the formation of dynamic surveillance of virtualperimeters in runtime will be studied Advanced context-aware applications could be developed from this improvement(eg from livestock control to baggage logistics) It isa research challenge which could be solved by designingmulti-sensorial surveillance systems that combine differentdata sources from diverse positional sensors (eg ultrasonictransducer stereo vision laser triangulation)
Acknowledgments
The work presented in this research paper has been partiallyfunded by the VI Framework Programme of the EuropeanUnion within the μSWN lsquoSolving Major Problems in Microsensorial Wireless Networksrsquo project (code TSI-034642)The authors would like to thank the anonymous reviewersfor their valuable comments
References
[1] Garcıa-Hernandez C F Ibarguengoytia-Gonzalez P HGarcıa-Hernandez J and Perez-Dıaz J A 2007 Wirelesssensor networks and applications a survey Int J ComputSci Netw Secur 7 270
[2] Garcia M L 2008 Design and Evaluation of PhysicalProtection Systems (Portsmouth NHButterworth-Heinemann) pp 86ndash8
[3] Garcıa A B Martınez J F Lopez J M Prayati A and RedondoL 2008 Problem Solving for Wireless Sensor Networks(Computer Communications and Network Series)(London Springer) pp 177ndash207
[4] Bounabat B Romadi R and Labhalla S 1999 Designingmulti-agent reactive systems a specification method based
on reactive decisional agents Approaches to IntelligenceAgents (Berlin Springer) p 775
[5] Romadi R and Berbia H 2008 Wireless sensor network aspecification method based on reactive decisional agents3rd Int Conf on Information and CommunicationTechnologies From Theory to Applications (ICTTA 2008)pp 1ndash5
[6] Frantisek Z Jr and Frantisek Z 2008 Simulation for wirelesssensor networks with intelligent nodes 10th Int Conf onComputer Modeling and Simulation (UKSIM 2008)pp 746ndash51
[7] Wang X Bi D-W Ding L and Wang S 2007 Agentcollaborative target localization and classification WirelSensor Netw Sensors 7 1359ndash86
[8] Rogers A Corkill D D and Jennings N R 2009 Agenttechnologies for sensor networks Intell Syst IEEE24 13ndash7
[9] Byunghun S Haksoo Ch and Hyung S L 2008 Surveillancetracking system using passive infrared motion sensors inwireless sensor network Int Conf on InformationNetworking (ICOIN 2008) pp 1ndash5
[10] Li Y Y and Parker L 2008 Intruder detection using a wirelesssensor network with an intelligent mobile robot responseProc IEEE SoutheastCon (Huntsville AL USA) pp 37ndash42
[11] Zappi P Farella E and Benini L 2007 Enhancing the spatialresolution of presence detection in a PIR based wirelesssurveillance network IEEE Conf on Advanced Video andSignal Based Surveillance (AVSS 2007) pp 295ndash300
[12] Singh J Madhow U Kumar R Suri S and Cagley R 2007Tracking multiple targets using binary proximity sensorsProc 6th Int Conf on Information Processing in SensorNetworks (IPSN rsquo07) (Cambridge MA USA) (New YorkACM) pp 529ndash38
[13] Moghavvemi M and Lu Ch S 2004 Pyroelectric infraredsensor for intruder detection TENCON 2004 IEEE Region10 Conf vol 4 pp 656ndash9
[14] Boonma P and Suzuki J 2009 Toward interoperablepublishsubscribe communication between sensor networksand access networks IEEE Consumer Communications andNetworking Conf pp 1ndash6
[15] Yuan Y L and Parker L E 2008 Detecting and monitoringtime-related abnormal events using a wireless sensornetwork and mobile robot IEEE RSJ Int Conf onIntelligent Robots and Systems (IROS 2008) pp 3292ndash8
10

Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 2 State diagram of the fixed nodes
so when this event occurs the agent executes thecorresponding action This procedure implies thatagents running on the mobile node wake up from alow power consumption mode and consequently performcorresponding functions automaticallyCommon objectives Both in the fixed and mobile nodesagents perform a set of specific tasks They interact toachieve common lsquodetecting presencersquo goalLifecycle The agent has capacity of being lsquobornrsquo when itis developed and activated to lsquoliversquo while it is operationalto lsquoclonersquo itself by distributing its knowledge over mobilenodes in order to fulfil its main objective and to lsquodiersquowhen it is unloaded from the node
34 Surveillance agent roles
Agents have been installed in two types of sensor nodes lsquofixednodesrsquo and lsquomobile nodesrsquo Fixed nodes are used for makingthe virtual perimeter and lsquomobile nodesrsquo are used for detectingclients and assistant staff The main agent functionalities inthese nodes are as follows
341 Fixed nodes The virtual perimeter is made up of fixednodes These nodes are equipped with PIR sensors which candetect any motion from people crossing the perimeter Thefixed nodes distinguish clients assistant staff and intrudersThis information is then sent to the sink node and fromthere to the security staff of the sanatorium via WiFi Allthe collected information is stored in a database
342 Mobile nodes The clients and assistant staff areequipped with this kind of node The nodes send a signalidentifying themselves when a fixed node of the virtualperimeter makes a request They have a business logic thatallows collaborating with the fixed nodes to discern the typeof intrusion (ie authorized or unauthorized)
35 Surveillance agent functions
The main design goals of the vpSA are as follows
bull Detection of access to the perimeter of clients identifyingsanatorium staff or intruders passing through the area
bull Alarm indication directed to sanatorium securitypersonnel reporting that an unauthorized person hascrossed the perimeter
351 Agent functions in the fixed nodes As shown infigure 2 vpSA located in the fixed nodes remains in a lowpower consumption mode until the virtual perimeter is crossedOnce the agent receives an lsquoaltered infrared sensorrsquo eventthe identification of its neighbours will be requested Ifthere are mobile nodes in this area they have to respondwith their identification to the fixed node so it can informbracelet identification to the security personnel and determinethe lsquobracelet presencersquo event Otherwise if an intruder hasaltered the perimeter the fixed node will process an alarmof lsquointruder presencersquo and inform the security staff Theperiod of time between the request for identification and itscorresponding response depends mainly on the time requiredbetween the sensor nodes (fixed and mobile) to communicateand exchange such events In any case the time is not morethan 3 s for the fixed nodes and 2 s for the mobile nodes
352 Agent functions in the mobile nodes The vpSAlocated in the mobile nodes remains in a low powerconsumption mode until an identification request event isreceived from the fixed node (perimeter node) Once theagent receives a lsquorequest identificationrsquo event it responds tothe perimeter node that has requested for it The time thattranspires is not more than 2 s The agent then returns to thelow-consumption mode
4 Implementation details
The vpSA has been deployed at the Versme Sanatorium inBirstonas (Lithuania) Two different types of nodes have beeninstalled fixed nodes that make up the virtual perimeter andmobile nodes (bracelets) that are worn by sanatorium patientsand authorized staff Messages are interchanged when thevirtual perimeter is crossed both by a bracelet or an intruder
Figure 3 shows the vpSA deployed in fixed nodes aspreviously subscribed to lsquoALTERED INFRARED SENSORrsquoevents This kind of event will be thrown by the Resources
5
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 3 Surveillance scenario lsquobracelet detectionrsquo use case
Figure 4 Surveillance scenario lsquointruder detectionrsquo use case
component of the μSMS middleware when the PIR sensor isexcited When a presence is detected the fixed node connectedto the PIR sensor generates a lsquoNODEID REQUESTrsquo externalpublication which will be delivered to the neighbouring nodesvia broadcast communication The bracelet node that crossesthe perimeter has to reply with a lsquoNODEID RESPONSErsquoexternal publication the fixed node will wait for the answerfrom the bracelet node for a short period of time (3 s) If thelsquoNODEID RESPONSErsquo event is received from the braceletnode the fixed mote will throw a lsquoBRACELET PRESENCErsquoevent containing the identification of the bracelet node thathas generated the presence in the perimeter Otherwise inthe case of intruder detection an lsquoINTRUDER PRESENCErsquoevent will be generated (see figure 4)
5 Validation scenario
In order to validate our approach in the real-worldenvironment a surveillance perimeter has been deployed atthe Versme Sanatorium in Birstonas (Lithuania) as shown infigure 5 This sanatorium is an establishment for specializedtreatment and recreation providing rehabilitation supportrehabilitation ambulatory rehabilitation and sanatoriumtreatment services
A WSN has been deployed using fixed nodes to markthe virtual perimeter on the external part of the sanatoriumwhich is 810 m long In order to enable the mechanism ofidentification in the fixed nodes a bracelet (mobile node) isassigned to every patient and assistant staff at the sanatorium
6
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 5 Virtual perimeter in sanatorium
During the evaluation 14 patients each wearing a braceletwere supervized by 5 assistant staff The bracelets are madeof Crossbow TelosB nodes (so-called motes) that integrateadditional biomedical sensors in order to spread their capacityof sensing data such as heart rate body temperature andhumidity In some particular cases the sanatorium staff willuse a PDA to receive presence events from the perimeterWhen an intruder is detected inside the perimeter the fixednode alerts the security staff by reporting the type of intrusionwhich could have been generated by a client or by an intruderThe personnel will then have to confirm the event and makedecision accordingly The data about the event are saved in adatabase for further analysis and consultation
Figure 5 shows the fixed nodes deployed around thesanatorium perimeter represented by dots They containPIR sensors which are used to detect the presence of peoplecrossing the perimeter
The virtual perimeter is made up of 50 TelosB mote sensorplatforms and used as implementation target Because ofproject cost constraints a sub-perimeter has been selected inorder to deploy the validation scenario Only 16 nodes from50 needed to cover the complete perimeter were used In thenext stage of the project the perimeter will be completelycovered by deploying 34 more nodes In the TelosB platforma sensor board can be plugged into each sensor node (mote)in order to carry out several environment readings includinglight temperature humidity infrared etc The deployedTelosB runs on two AA batteries with a lifespan thatdepends on communication use and computation resourcesCommunications within a 75ndash100 m outdoor range varygreatly under environmental conditions as can be observedin the datasheet The motes run the TinyOS operating systemsand are equipped with 48 kB of flash memory and 10 kB ofRAM memory IEEE 802154-compliant radio Moreover
these nodes are equipped with infrared sensors (LUMINITETX50040)
51 Deployment requirements
In the preliminary tests it was identified that the same physicalevent was detected by two or more nodes generating alarmsin places where incursions were not carried out This was dueto the overlapping of motes coverage ratio inside the detectionarea In other words two motes shared part of their detectionarea
Hence it was also determined that the deployment of fixednodes considers the intersection range of the infrared sensorsThis intersection area just involves two consecutive fixed nodesthat take part of the surveillance perimeter Thus it has beenguaranteed that the bracelet will only respond to those fixednodes involved in the sector where it has crossed It therebyreduces false alarms Two major requirements are necessaryin order to enable a proper detection of people wearingbracelets the two nodes involved in a perimeter sector haveto be deployed within the maximum PIR detection distancebetween them (40 m) and their PIRs must be accuratelybrought face to face This ideal scenario is illustrated infigure 6
As a validation requirement multi-hop radio configura-tion has been validated Network deployment was designedso as not to exceed five hops between sensor nodes and sinknode In order to set this scenario up both physical locationof sensor nodes and strength of their radio signal were takeninto account
52 Validation results
It took a period of 8 days to carry out the tests During thistime both intrusion and authorized (identified by bracelets)incursions through the perimeter were generated Figure 7illustrates the alarm generated on the application of the securitystaff once the perimeter has been violated The WSN-CAD surveillance application graphically shows two kindsof perimeter crossings performed by a bracelet (authorizedaccess) and intruder
In this period the energy consumption of the hardwarecomponents making up the virtual perimeter surveillance hasbeen determined
This study was focused on calculating the autonomy of oursurveillance system paying special attention to the perimeternodes since replacing their batteries is a bit difficult they areusually hung from lampposts or similar places that are noteasily accessible Such a problem for mobile nodes does notoccur since they are completely accessible to users
As previously mentioned TelosB motes and LuminiteTX50040 PIRs are the two main hardware components of theperimeter nodes Luminite TX50040 PIRs are connected toTelosB motes through their GPIO pins Each of those hardwareelements has its own energetic characteristics (see tables 2and 3) so consumption calculations have to be performedindependently
In order to calculate the autonomy of both TelosB moteand Luminite TX500 PIR according to the generated events
7
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 6 PIR sensor deployment conditions
Figure 7 WSN-CAD surveillance application
Table 2 Consumption of hardware execution modes
Hardware Execution Currentcomponent mode consumption
TelosB mote Tx mode (0 dBm) 253 mARx mode 23 mAIdle mode 21 μA
Luminite Stand-by mode 9 μATX50040 PIR Alarm mode 20 mA
of presence during validation (see table 4) let us considera balanced distribution of those events of presence betweennodes that make up the virtual perimeter In this manner 42events of presence are counted in total (per day and node)of which 13 events are of INTRUDER PRESENCE and 29events are of BRACELET PRESENCE
Table 3 Battery supply for hardware components
Hardwarecomponent Battery Battery features
TelosB mote 4xAA (redesignedmotes)
Lithium rechargeable15 V 2900 mAh
LuminiteTX50040 PIR
1xPP3 Lithium 9 V 230 mAh
Table 4 System validation results
Use case
Classification Bracelet Intruder
True positive (tp) 4277 1125False positive (fp) 17 8False negative (fn) 0 0
521 Luminite TX50040 PIR autonomy analysis Whena Luminite TX50040 PIR is excited because of a perimetercrossing the PIR hardware turns from lsquostand byrsquo mode tolsquoalarmrsquo mode The lsquoalarm modersquo of Luminite TX50040 PIRactivates for 3 s every time it is excited The PIR therebyworks in that mode almost 1 min per day consuming 092 mAhaccording to energy data shown in tables 2 and 3 Thereforethe Luminite TX50040 PIR can autonomously work for 251days it is equivalent to detecting approximately 10 542 eventsof presence
522 TelosB mote autonomy analysis Every time fixednodes process an event of presence TelosB motes needto send two messages via radio (see figure 2) first aNODEID REQUEST publication and second a PRESENCEevent to identify the kind of detected presence Eventually ifa NODEID RESPONSE event is received from a braceletthen a BRACELET PRESENCE event is thrown to thegateway otherwise an INTRUDER PRESENCE event isthrown The node has to switch the RF transceiver onfor 8 ms in order to transmit the two necessary messages(NODEID REQUEST and PRESENCE event) and 43 ms
8
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
to receive a NODEID RESPONSE event if needed Takinginto account the TelosB mote energy characteristics as shownin tables 2 and 3 the mote consumption is 4371 mAhper day Originally TelosB mote was equipped with 2AA batteries but fixed TelosB motes were redesigned inorder to increase their autonomy by enabling two more AAbatteries From the consumption per day previously obtainedfixed TelosB motes making up the virtual perimeter canthereby autonomously work for 265 days this is equivalentto transmitting approximately 11 130 events of presence
53 Performance evaluation
In this section experimental results that evaluate theperformance of the surveillance-agent system based on WSNsdescribed in the previous section are presented
Table 4 shows the results obtained during systemvalidation The results are classified into three categoriesThe first set of results true positive (tp) refers to those eventsproperly discerned by the node indicating who crossed theperimeter During the validation test 4277 bracelets and 1125intruders were detected as true positive (ie bracelet nodes andintruders respectively)
The second set of results false positive (fp) indicates that(1) 17 bracelet accesses were detected as intruder and (2) 8intruder accesses were detected as bracelet In the case of (1)it has been concluded that the false positive was caused by adeficient radio signal of either fixed node or of the bracelet(eg reflections attenuations and interferences) which didnot allow proper communication among bracelets and fixednodes It is then not possible to exchange messages thatallow identification of the mobile node In order to avoidthis situation the characteristics of deployment in order tooptimize the performance of the PIRs have been modified Inthe case of (2) false positive was due to an intruder crossingthe perimeter when there was a bracelet in the radio coveragearea of the fixed node
Finally false negative (fn) represents those events ofpresence that occurred inside the perimeter and that were notdetected by the node False negative was 0 as in all casesan alarm was generated when the perimeter was crossed byeither an intruder or a bracelet
According to the data shown in table 4 the performancemetrics defined in [15] have been adapted in order to determineboth precision and recall of the system
In the context of this work precision indicates thepercentage of detections properly classified from the totaldetections Specifically precision is the number of truepositives divided by the total number of elements labelledas belonging to the positive class Thus precision is obtainedby applying (1) that corresponds to 99 which indicates thatthe system has a high degree of precision This rate has beenachieved through collaborating fixed nodes with mobile nodes
precision = tp
tp + fp (1)
Regarding recall it indicates the number of eventscorrectly detected from those that should have been detectedHence the number of detected events of presence from the total
occurred presence has been obtained by applying expression(2) which corresponds to 1 That has been so due todeployment as explained in section 51 that allowed notonly the detection of every unauthorized crossing which isthe major goal of our surveillance-agent system but also thedetection of every perimeter intrusion from authorized staffand patient crossings
recall = tp
tp + f n (2)
54 Lessons learned
The work described in this paper is our experience with apervasive surveillance agent based on WSNs in a practicalapplication and its evaluation through an actual deploymentof motes Several lessons have been learnt from the workperformed in this research which can be applied to makingdecisions during the development of a system related topervasive surveillance The following points are someremarks that could be useful to future researchers involvedin the development and management of pervasive surveillancesystems based on WSNs
bull The sensors for deployment have to be chosen consideringthe characteristics of coverage to be modelled
bull The geographical factors of the place that will bemonitored for the detection of intrusions have to be takeninto account
bull The number of required sensors has to be calculatedin order to guarantee the expected security level fromthe sensed spatial density and the critical level of themonitored area
bull The set of information which is extracted from datathat is generated by the agent allows determiningthe weaknesses of the coverage area and discoveringvulnerabilities for hypothetical intrusion paths
6 Conclusions and future research
The work described in this paper has presented our experienceabout developing a surveillance system using WSNs forpractical applications and evaluating their deployment inthe real world A mechanism for controlling virtualperimeters using WSN that manage mobile nodes in a specificenvironment has been proposed A deployment mechanismhas been used in order to guarantee effective detection andan efficient use of motes which operate in a low powerconsumption mode in periods when events are not receivedIn addition the lsquointelligencersquo of the agent has been distributedby using mobile nodes to discern who has caused the eventof presence the client the sanatorium staff or the intruderMoreover our system has the capacity to detect more than oneauthorized person crossing the perimeter since the system isbased on intelligent distribution supported by mobile nodesThis characteristic contributes in saving both processingresources and power consumption
The deployment of this solution results in cost savingsbecause cables are not required during installation Therefore
9
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
this kind of deployment could become more spatially densethan traditional approaches Currently those mechanisms playan important role in building confidence in our environment toensure safety becoming key elements for preventing multipletypes of threats and allowing better quality of life for humans
As future research the manner how to integrate theagent in the formation of dynamic surveillance of virtualperimeters in runtime will be studied Advanced context-aware applications could be developed from this improvement(eg from livestock control to baggage logistics) It isa research challenge which could be solved by designingmulti-sensorial surveillance systems that combine differentdata sources from diverse positional sensors (eg ultrasonictransducer stereo vision laser triangulation)
Acknowledgments
The work presented in this research paper has been partiallyfunded by the VI Framework Programme of the EuropeanUnion within the μSWN lsquoSolving Major Problems in Microsensorial Wireless Networksrsquo project (code TSI-034642)The authors would like to thank the anonymous reviewersfor their valuable comments
References
[1] Garcıa-Hernandez C F Ibarguengoytia-Gonzalez P HGarcıa-Hernandez J and Perez-Dıaz J A 2007 Wirelesssensor networks and applications a survey Int J ComputSci Netw Secur 7 270
[2] Garcia M L 2008 Design and Evaluation of PhysicalProtection Systems (Portsmouth NHButterworth-Heinemann) pp 86ndash8
[3] Garcıa A B Martınez J F Lopez J M Prayati A and RedondoL 2008 Problem Solving for Wireless Sensor Networks(Computer Communications and Network Series)(London Springer) pp 177ndash207
[4] Bounabat B Romadi R and Labhalla S 1999 Designingmulti-agent reactive systems a specification method based
on reactive decisional agents Approaches to IntelligenceAgents (Berlin Springer) p 775
[5] Romadi R and Berbia H 2008 Wireless sensor network aspecification method based on reactive decisional agents3rd Int Conf on Information and CommunicationTechnologies From Theory to Applications (ICTTA 2008)pp 1ndash5
[6] Frantisek Z Jr and Frantisek Z 2008 Simulation for wirelesssensor networks with intelligent nodes 10th Int Conf onComputer Modeling and Simulation (UKSIM 2008)pp 746ndash51
[7] Wang X Bi D-W Ding L and Wang S 2007 Agentcollaborative target localization and classification WirelSensor Netw Sensors 7 1359ndash86
[8] Rogers A Corkill D D and Jennings N R 2009 Agenttechnologies for sensor networks Intell Syst IEEE24 13ndash7
[9] Byunghun S Haksoo Ch and Hyung S L 2008 Surveillancetracking system using passive infrared motion sensors inwireless sensor network Int Conf on InformationNetworking (ICOIN 2008) pp 1ndash5
[10] Li Y Y and Parker L 2008 Intruder detection using a wirelesssensor network with an intelligent mobile robot responseProc IEEE SoutheastCon (Huntsville AL USA) pp 37ndash42
[11] Zappi P Farella E and Benini L 2007 Enhancing the spatialresolution of presence detection in a PIR based wirelesssurveillance network IEEE Conf on Advanced Video andSignal Based Surveillance (AVSS 2007) pp 295ndash300
[12] Singh J Madhow U Kumar R Suri S and Cagley R 2007Tracking multiple targets using binary proximity sensorsProc 6th Int Conf on Information Processing in SensorNetworks (IPSN rsquo07) (Cambridge MA USA) (New YorkACM) pp 529ndash38
[13] Moghavvemi M and Lu Ch S 2004 Pyroelectric infraredsensor for intruder detection TENCON 2004 IEEE Region10 Conf vol 4 pp 656ndash9
[14] Boonma P and Suzuki J 2009 Toward interoperablepublishsubscribe communication between sensor networksand access networks IEEE Consumer Communications andNetworking Conf pp 1ndash6
[15] Yuan Y L and Parker L E 2008 Detecting and monitoringtime-related abnormal events using a wireless sensornetwork and mobile robot IEEE RSJ Int Conf onIntelligent Robots and Systems (IROS 2008) pp 3292ndash8
10
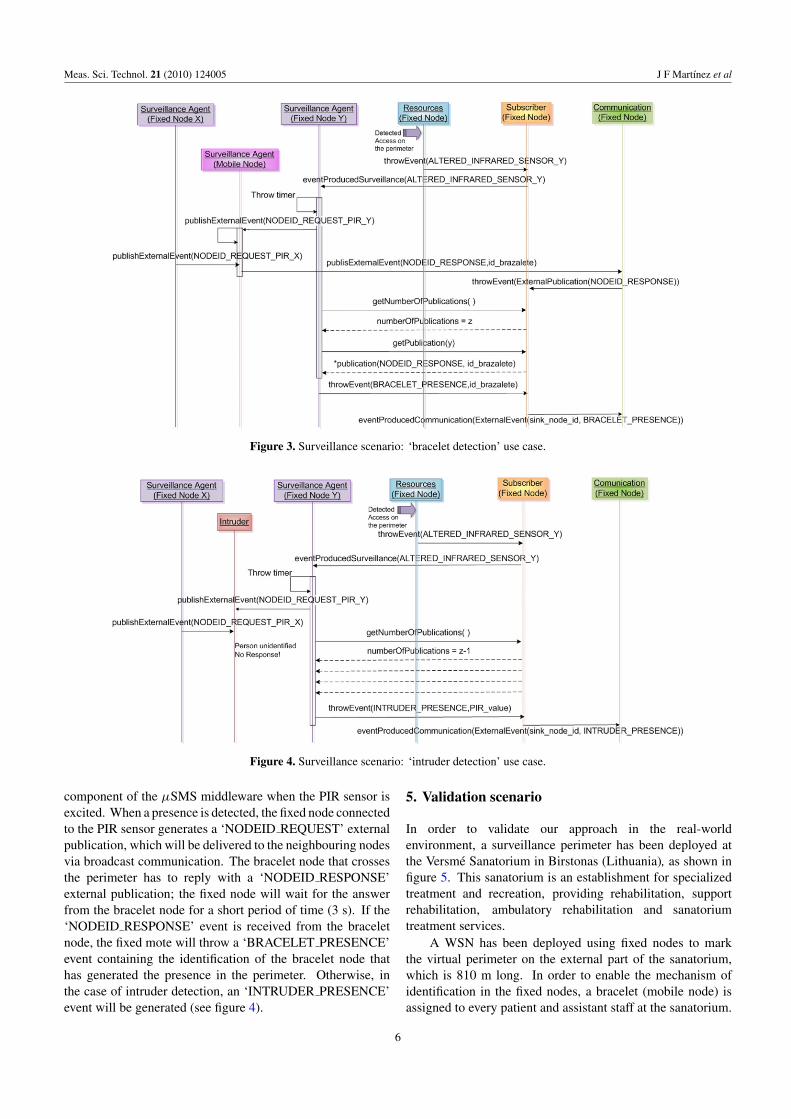
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 3 Surveillance scenario lsquobracelet detectionrsquo use case
Figure 4 Surveillance scenario lsquointruder detectionrsquo use case
component of the μSMS middleware when the PIR sensor isexcited When a presence is detected the fixed node connectedto the PIR sensor generates a lsquoNODEID REQUESTrsquo externalpublication which will be delivered to the neighbouring nodesvia broadcast communication The bracelet node that crossesthe perimeter has to reply with a lsquoNODEID RESPONSErsquoexternal publication the fixed node will wait for the answerfrom the bracelet node for a short period of time (3 s) If thelsquoNODEID RESPONSErsquo event is received from the braceletnode the fixed mote will throw a lsquoBRACELET PRESENCErsquoevent containing the identification of the bracelet node thathas generated the presence in the perimeter Otherwise inthe case of intruder detection an lsquoINTRUDER PRESENCErsquoevent will be generated (see figure 4)
5 Validation scenario
In order to validate our approach in the real-worldenvironment a surveillance perimeter has been deployed atthe Versme Sanatorium in Birstonas (Lithuania) as shown infigure 5 This sanatorium is an establishment for specializedtreatment and recreation providing rehabilitation supportrehabilitation ambulatory rehabilitation and sanatoriumtreatment services
A WSN has been deployed using fixed nodes to markthe virtual perimeter on the external part of the sanatoriumwhich is 810 m long In order to enable the mechanism ofidentification in the fixed nodes a bracelet (mobile node) isassigned to every patient and assistant staff at the sanatorium
6
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 5 Virtual perimeter in sanatorium
During the evaluation 14 patients each wearing a braceletwere supervized by 5 assistant staff The bracelets are madeof Crossbow TelosB nodes (so-called motes) that integrateadditional biomedical sensors in order to spread their capacityof sensing data such as heart rate body temperature andhumidity In some particular cases the sanatorium staff willuse a PDA to receive presence events from the perimeterWhen an intruder is detected inside the perimeter the fixednode alerts the security staff by reporting the type of intrusionwhich could have been generated by a client or by an intruderThe personnel will then have to confirm the event and makedecision accordingly The data about the event are saved in adatabase for further analysis and consultation
Figure 5 shows the fixed nodes deployed around thesanatorium perimeter represented by dots They containPIR sensors which are used to detect the presence of peoplecrossing the perimeter
The virtual perimeter is made up of 50 TelosB mote sensorplatforms and used as implementation target Because ofproject cost constraints a sub-perimeter has been selected inorder to deploy the validation scenario Only 16 nodes from50 needed to cover the complete perimeter were used In thenext stage of the project the perimeter will be completelycovered by deploying 34 more nodes In the TelosB platforma sensor board can be plugged into each sensor node (mote)in order to carry out several environment readings includinglight temperature humidity infrared etc The deployedTelosB runs on two AA batteries with a lifespan thatdepends on communication use and computation resourcesCommunications within a 75ndash100 m outdoor range varygreatly under environmental conditions as can be observedin the datasheet The motes run the TinyOS operating systemsand are equipped with 48 kB of flash memory and 10 kB ofRAM memory IEEE 802154-compliant radio Moreover
these nodes are equipped with infrared sensors (LUMINITETX50040)
51 Deployment requirements
In the preliminary tests it was identified that the same physicalevent was detected by two or more nodes generating alarmsin places where incursions were not carried out This was dueto the overlapping of motes coverage ratio inside the detectionarea In other words two motes shared part of their detectionarea
Hence it was also determined that the deployment of fixednodes considers the intersection range of the infrared sensorsThis intersection area just involves two consecutive fixed nodesthat take part of the surveillance perimeter Thus it has beenguaranteed that the bracelet will only respond to those fixednodes involved in the sector where it has crossed It therebyreduces false alarms Two major requirements are necessaryin order to enable a proper detection of people wearingbracelets the two nodes involved in a perimeter sector haveto be deployed within the maximum PIR detection distancebetween them (40 m) and their PIRs must be accuratelybrought face to face This ideal scenario is illustrated infigure 6
As a validation requirement multi-hop radio configura-tion has been validated Network deployment was designedso as not to exceed five hops between sensor nodes and sinknode In order to set this scenario up both physical locationof sensor nodes and strength of their radio signal were takeninto account
52 Validation results
It took a period of 8 days to carry out the tests During thistime both intrusion and authorized (identified by bracelets)incursions through the perimeter were generated Figure 7illustrates the alarm generated on the application of the securitystaff once the perimeter has been violated The WSN-CAD surveillance application graphically shows two kindsof perimeter crossings performed by a bracelet (authorizedaccess) and intruder
In this period the energy consumption of the hardwarecomponents making up the virtual perimeter surveillance hasbeen determined
This study was focused on calculating the autonomy of oursurveillance system paying special attention to the perimeternodes since replacing their batteries is a bit difficult they areusually hung from lampposts or similar places that are noteasily accessible Such a problem for mobile nodes does notoccur since they are completely accessible to users
As previously mentioned TelosB motes and LuminiteTX50040 PIRs are the two main hardware components of theperimeter nodes Luminite TX50040 PIRs are connected toTelosB motes through their GPIO pins Each of those hardwareelements has its own energetic characteristics (see tables 2and 3) so consumption calculations have to be performedindependently
In order to calculate the autonomy of both TelosB moteand Luminite TX500 PIR according to the generated events
7
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 6 PIR sensor deployment conditions
Figure 7 WSN-CAD surveillance application
Table 2 Consumption of hardware execution modes
Hardware Execution Currentcomponent mode consumption
TelosB mote Tx mode (0 dBm) 253 mARx mode 23 mAIdle mode 21 μA
Luminite Stand-by mode 9 μATX50040 PIR Alarm mode 20 mA
of presence during validation (see table 4) let us considera balanced distribution of those events of presence betweennodes that make up the virtual perimeter In this manner 42events of presence are counted in total (per day and node)of which 13 events are of INTRUDER PRESENCE and 29events are of BRACELET PRESENCE
Table 3 Battery supply for hardware components
Hardwarecomponent Battery Battery features
TelosB mote 4xAA (redesignedmotes)
Lithium rechargeable15 V 2900 mAh
LuminiteTX50040 PIR
1xPP3 Lithium 9 V 230 mAh
Table 4 System validation results
Use case
Classification Bracelet Intruder
True positive (tp) 4277 1125False positive (fp) 17 8False negative (fn) 0 0
521 Luminite TX50040 PIR autonomy analysis Whena Luminite TX50040 PIR is excited because of a perimetercrossing the PIR hardware turns from lsquostand byrsquo mode tolsquoalarmrsquo mode The lsquoalarm modersquo of Luminite TX50040 PIRactivates for 3 s every time it is excited The PIR therebyworks in that mode almost 1 min per day consuming 092 mAhaccording to energy data shown in tables 2 and 3 Thereforethe Luminite TX50040 PIR can autonomously work for 251days it is equivalent to detecting approximately 10 542 eventsof presence
522 TelosB mote autonomy analysis Every time fixednodes process an event of presence TelosB motes needto send two messages via radio (see figure 2) first aNODEID REQUEST publication and second a PRESENCEevent to identify the kind of detected presence Eventually ifa NODEID RESPONSE event is received from a braceletthen a BRACELET PRESENCE event is thrown to thegateway otherwise an INTRUDER PRESENCE event isthrown The node has to switch the RF transceiver onfor 8 ms in order to transmit the two necessary messages(NODEID REQUEST and PRESENCE event) and 43 ms
8
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
to receive a NODEID RESPONSE event if needed Takinginto account the TelosB mote energy characteristics as shownin tables 2 and 3 the mote consumption is 4371 mAhper day Originally TelosB mote was equipped with 2AA batteries but fixed TelosB motes were redesigned inorder to increase their autonomy by enabling two more AAbatteries From the consumption per day previously obtainedfixed TelosB motes making up the virtual perimeter canthereby autonomously work for 265 days this is equivalentto transmitting approximately 11 130 events of presence
53 Performance evaluation
In this section experimental results that evaluate theperformance of the surveillance-agent system based on WSNsdescribed in the previous section are presented
Table 4 shows the results obtained during systemvalidation The results are classified into three categoriesThe first set of results true positive (tp) refers to those eventsproperly discerned by the node indicating who crossed theperimeter During the validation test 4277 bracelets and 1125intruders were detected as true positive (ie bracelet nodes andintruders respectively)
The second set of results false positive (fp) indicates that(1) 17 bracelet accesses were detected as intruder and (2) 8intruder accesses were detected as bracelet In the case of (1)it has been concluded that the false positive was caused by adeficient radio signal of either fixed node or of the bracelet(eg reflections attenuations and interferences) which didnot allow proper communication among bracelets and fixednodes It is then not possible to exchange messages thatallow identification of the mobile node In order to avoidthis situation the characteristics of deployment in order tooptimize the performance of the PIRs have been modified Inthe case of (2) false positive was due to an intruder crossingthe perimeter when there was a bracelet in the radio coveragearea of the fixed node
Finally false negative (fn) represents those events ofpresence that occurred inside the perimeter and that were notdetected by the node False negative was 0 as in all casesan alarm was generated when the perimeter was crossed byeither an intruder or a bracelet
According to the data shown in table 4 the performancemetrics defined in [15] have been adapted in order to determineboth precision and recall of the system
In the context of this work precision indicates thepercentage of detections properly classified from the totaldetections Specifically precision is the number of truepositives divided by the total number of elements labelledas belonging to the positive class Thus precision is obtainedby applying (1) that corresponds to 99 which indicates thatthe system has a high degree of precision This rate has beenachieved through collaborating fixed nodes with mobile nodes
precision = tp
tp + fp (1)
Regarding recall it indicates the number of eventscorrectly detected from those that should have been detectedHence the number of detected events of presence from the total
occurred presence has been obtained by applying expression(2) which corresponds to 1 That has been so due todeployment as explained in section 51 that allowed notonly the detection of every unauthorized crossing which isthe major goal of our surveillance-agent system but also thedetection of every perimeter intrusion from authorized staffand patient crossings
recall = tp
tp + f n (2)
54 Lessons learned
The work described in this paper is our experience with apervasive surveillance agent based on WSNs in a practicalapplication and its evaluation through an actual deploymentof motes Several lessons have been learnt from the workperformed in this research which can be applied to makingdecisions during the development of a system related topervasive surveillance The following points are someremarks that could be useful to future researchers involvedin the development and management of pervasive surveillancesystems based on WSNs
bull The sensors for deployment have to be chosen consideringthe characteristics of coverage to be modelled
bull The geographical factors of the place that will bemonitored for the detection of intrusions have to be takeninto account
bull The number of required sensors has to be calculatedin order to guarantee the expected security level fromthe sensed spatial density and the critical level of themonitored area
bull The set of information which is extracted from datathat is generated by the agent allows determiningthe weaknesses of the coverage area and discoveringvulnerabilities for hypothetical intrusion paths
6 Conclusions and future research
The work described in this paper has presented our experienceabout developing a surveillance system using WSNs forpractical applications and evaluating their deployment inthe real world A mechanism for controlling virtualperimeters using WSN that manage mobile nodes in a specificenvironment has been proposed A deployment mechanismhas been used in order to guarantee effective detection andan efficient use of motes which operate in a low powerconsumption mode in periods when events are not receivedIn addition the lsquointelligencersquo of the agent has been distributedby using mobile nodes to discern who has caused the eventof presence the client the sanatorium staff or the intruderMoreover our system has the capacity to detect more than oneauthorized person crossing the perimeter since the system isbased on intelligent distribution supported by mobile nodesThis characteristic contributes in saving both processingresources and power consumption
The deployment of this solution results in cost savingsbecause cables are not required during installation Therefore
9
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
this kind of deployment could become more spatially densethan traditional approaches Currently those mechanisms playan important role in building confidence in our environment toensure safety becoming key elements for preventing multipletypes of threats and allowing better quality of life for humans
As future research the manner how to integrate theagent in the formation of dynamic surveillance of virtualperimeters in runtime will be studied Advanced context-aware applications could be developed from this improvement(eg from livestock control to baggage logistics) It isa research challenge which could be solved by designingmulti-sensorial surveillance systems that combine differentdata sources from diverse positional sensors (eg ultrasonictransducer stereo vision laser triangulation)
Acknowledgments
The work presented in this research paper has been partiallyfunded by the VI Framework Programme of the EuropeanUnion within the μSWN lsquoSolving Major Problems in Microsensorial Wireless Networksrsquo project (code TSI-034642)The authors would like to thank the anonymous reviewersfor their valuable comments
References
[1] Garcıa-Hernandez C F Ibarguengoytia-Gonzalez P HGarcıa-Hernandez J and Perez-Dıaz J A 2007 Wirelesssensor networks and applications a survey Int J ComputSci Netw Secur 7 270
[2] Garcia M L 2008 Design and Evaluation of PhysicalProtection Systems (Portsmouth NHButterworth-Heinemann) pp 86ndash8
[3] Garcıa A B Martınez J F Lopez J M Prayati A and RedondoL 2008 Problem Solving for Wireless Sensor Networks(Computer Communications and Network Series)(London Springer) pp 177ndash207
[4] Bounabat B Romadi R and Labhalla S 1999 Designingmulti-agent reactive systems a specification method based
on reactive decisional agents Approaches to IntelligenceAgents (Berlin Springer) p 775
[5] Romadi R and Berbia H 2008 Wireless sensor network aspecification method based on reactive decisional agents3rd Int Conf on Information and CommunicationTechnologies From Theory to Applications (ICTTA 2008)pp 1ndash5
[6] Frantisek Z Jr and Frantisek Z 2008 Simulation for wirelesssensor networks with intelligent nodes 10th Int Conf onComputer Modeling and Simulation (UKSIM 2008)pp 746ndash51
[7] Wang X Bi D-W Ding L and Wang S 2007 Agentcollaborative target localization and classification WirelSensor Netw Sensors 7 1359ndash86
[8] Rogers A Corkill D D and Jennings N R 2009 Agenttechnologies for sensor networks Intell Syst IEEE24 13ndash7
[9] Byunghun S Haksoo Ch and Hyung S L 2008 Surveillancetracking system using passive infrared motion sensors inwireless sensor network Int Conf on InformationNetworking (ICOIN 2008) pp 1ndash5
[10] Li Y Y and Parker L 2008 Intruder detection using a wirelesssensor network with an intelligent mobile robot responseProc IEEE SoutheastCon (Huntsville AL USA) pp 37ndash42
[11] Zappi P Farella E and Benini L 2007 Enhancing the spatialresolution of presence detection in a PIR based wirelesssurveillance network IEEE Conf on Advanced Video andSignal Based Surveillance (AVSS 2007) pp 295ndash300
[12] Singh J Madhow U Kumar R Suri S and Cagley R 2007Tracking multiple targets using binary proximity sensorsProc 6th Int Conf on Information Processing in SensorNetworks (IPSN rsquo07) (Cambridge MA USA) (New YorkACM) pp 529ndash38
[13] Moghavvemi M and Lu Ch S 2004 Pyroelectric infraredsensor for intruder detection TENCON 2004 IEEE Region10 Conf vol 4 pp 656ndash9
[14] Boonma P and Suzuki J 2009 Toward interoperablepublishsubscribe communication between sensor networksand access networks IEEE Consumer Communications andNetworking Conf pp 1ndash6
[15] Yuan Y L and Parker L E 2008 Detecting and monitoringtime-related abnormal events using a wireless sensornetwork and mobile robot IEEE RSJ Int Conf onIntelligent Robots and Systems (IROS 2008) pp 3292ndash8
10

Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 5 Virtual perimeter in sanatorium
During the evaluation 14 patients each wearing a braceletwere supervized by 5 assistant staff The bracelets are madeof Crossbow TelosB nodes (so-called motes) that integrateadditional biomedical sensors in order to spread their capacityof sensing data such as heart rate body temperature andhumidity In some particular cases the sanatorium staff willuse a PDA to receive presence events from the perimeterWhen an intruder is detected inside the perimeter the fixednode alerts the security staff by reporting the type of intrusionwhich could have been generated by a client or by an intruderThe personnel will then have to confirm the event and makedecision accordingly The data about the event are saved in adatabase for further analysis and consultation
Figure 5 shows the fixed nodes deployed around thesanatorium perimeter represented by dots They containPIR sensors which are used to detect the presence of peoplecrossing the perimeter
The virtual perimeter is made up of 50 TelosB mote sensorplatforms and used as implementation target Because ofproject cost constraints a sub-perimeter has been selected inorder to deploy the validation scenario Only 16 nodes from50 needed to cover the complete perimeter were used In thenext stage of the project the perimeter will be completelycovered by deploying 34 more nodes In the TelosB platforma sensor board can be plugged into each sensor node (mote)in order to carry out several environment readings includinglight temperature humidity infrared etc The deployedTelosB runs on two AA batteries with a lifespan thatdepends on communication use and computation resourcesCommunications within a 75ndash100 m outdoor range varygreatly under environmental conditions as can be observedin the datasheet The motes run the TinyOS operating systemsand are equipped with 48 kB of flash memory and 10 kB ofRAM memory IEEE 802154-compliant radio Moreover
these nodes are equipped with infrared sensors (LUMINITETX50040)
51 Deployment requirements
In the preliminary tests it was identified that the same physicalevent was detected by two or more nodes generating alarmsin places where incursions were not carried out This was dueto the overlapping of motes coverage ratio inside the detectionarea In other words two motes shared part of their detectionarea
Hence it was also determined that the deployment of fixednodes considers the intersection range of the infrared sensorsThis intersection area just involves two consecutive fixed nodesthat take part of the surveillance perimeter Thus it has beenguaranteed that the bracelet will only respond to those fixednodes involved in the sector where it has crossed It therebyreduces false alarms Two major requirements are necessaryin order to enable a proper detection of people wearingbracelets the two nodes involved in a perimeter sector haveto be deployed within the maximum PIR detection distancebetween them (40 m) and their PIRs must be accuratelybrought face to face This ideal scenario is illustrated infigure 6
As a validation requirement multi-hop radio configura-tion has been validated Network deployment was designedso as not to exceed five hops between sensor nodes and sinknode In order to set this scenario up both physical locationof sensor nodes and strength of their radio signal were takeninto account
52 Validation results
It took a period of 8 days to carry out the tests During thistime both intrusion and authorized (identified by bracelets)incursions through the perimeter were generated Figure 7illustrates the alarm generated on the application of the securitystaff once the perimeter has been violated The WSN-CAD surveillance application graphically shows two kindsof perimeter crossings performed by a bracelet (authorizedaccess) and intruder
In this period the energy consumption of the hardwarecomponents making up the virtual perimeter surveillance hasbeen determined
This study was focused on calculating the autonomy of oursurveillance system paying special attention to the perimeternodes since replacing their batteries is a bit difficult they areusually hung from lampposts or similar places that are noteasily accessible Such a problem for mobile nodes does notoccur since they are completely accessible to users
As previously mentioned TelosB motes and LuminiteTX50040 PIRs are the two main hardware components of theperimeter nodes Luminite TX50040 PIRs are connected toTelosB motes through their GPIO pins Each of those hardwareelements has its own energetic characteristics (see tables 2and 3) so consumption calculations have to be performedindependently
In order to calculate the autonomy of both TelosB moteand Luminite TX500 PIR according to the generated events
7
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 6 PIR sensor deployment conditions
Figure 7 WSN-CAD surveillance application
Table 2 Consumption of hardware execution modes
Hardware Execution Currentcomponent mode consumption
TelosB mote Tx mode (0 dBm) 253 mARx mode 23 mAIdle mode 21 μA
Luminite Stand-by mode 9 μATX50040 PIR Alarm mode 20 mA
of presence during validation (see table 4) let us considera balanced distribution of those events of presence betweennodes that make up the virtual perimeter In this manner 42events of presence are counted in total (per day and node)of which 13 events are of INTRUDER PRESENCE and 29events are of BRACELET PRESENCE
Table 3 Battery supply for hardware components
Hardwarecomponent Battery Battery features
TelosB mote 4xAA (redesignedmotes)
Lithium rechargeable15 V 2900 mAh
LuminiteTX50040 PIR
1xPP3 Lithium 9 V 230 mAh
Table 4 System validation results
Use case
Classification Bracelet Intruder
True positive (tp) 4277 1125False positive (fp) 17 8False negative (fn) 0 0
521 Luminite TX50040 PIR autonomy analysis Whena Luminite TX50040 PIR is excited because of a perimetercrossing the PIR hardware turns from lsquostand byrsquo mode tolsquoalarmrsquo mode The lsquoalarm modersquo of Luminite TX50040 PIRactivates for 3 s every time it is excited The PIR therebyworks in that mode almost 1 min per day consuming 092 mAhaccording to energy data shown in tables 2 and 3 Thereforethe Luminite TX50040 PIR can autonomously work for 251days it is equivalent to detecting approximately 10 542 eventsof presence
522 TelosB mote autonomy analysis Every time fixednodes process an event of presence TelosB motes needto send two messages via radio (see figure 2) first aNODEID REQUEST publication and second a PRESENCEevent to identify the kind of detected presence Eventually ifa NODEID RESPONSE event is received from a braceletthen a BRACELET PRESENCE event is thrown to thegateway otherwise an INTRUDER PRESENCE event isthrown The node has to switch the RF transceiver onfor 8 ms in order to transmit the two necessary messages(NODEID REQUEST and PRESENCE event) and 43 ms
8
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
to receive a NODEID RESPONSE event if needed Takinginto account the TelosB mote energy characteristics as shownin tables 2 and 3 the mote consumption is 4371 mAhper day Originally TelosB mote was equipped with 2AA batteries but fixed TelosB motes were redesigned inorder to increase their autonomy by enabling two more AAbatteries From the consumption per day previously obtainedfixed TelosB motes making up the virtual perimeter canthereby autonomously work for 265 days this is equivalentto transmitting approximately 11 130 events of presence
53 Performance evaluation
In this section experimental results that evaluate theperformance of the surveillance-agent system based on WSNsdescribed in the previous section are presented
Table 4 shows the results obtained during systemvalidation The results are classified into three categoriesThe first set of results true positive (tp) refers to those eventsproperly discerned by the node indicating who crossed theperimeter During the validation test 4277 bracelets and 1125intruders were detected as true positive (ie bracelet nodes andintruders respectively)
The second set of results false positive (fp) indicates that(1) 17 bracelet accesses were detected as intruder and (2) 8intruder accesses were detected as bracelet In the case of (1)it has been concluded that the false positive was caused by adeficient radio signal of either fixed node or of the bracelet(eg reflections attenuations and interferences) which didnot allow proper communication among bracelets and fixednodes It is then not possible to exchange messages thatallow identification of the mobile node In order to avoidthis situation the characteristics of deployment in order tooptimize the performance of the PIRs have been modified Inthe case of (2) false positive was due to an intruder crossingthe perimeter when there was a bracelet in the radio coveragearea of the fixed node
Finally false negative (fn) represents those events ofpresence that occurred inside the perimeter and that were notdetected by the node False negative was 0 as in all casesan alarm was generated when the perimeter was crossed byeither an intruder or a bracelet
According to the data shown in table 4 the performancemetrics defined in [15] have been adapted in order to determineboth precision and recall of the system
In the context of this work precision indicates thepercentage of detections properly classified from the totaldetections Specifically precision is the number of truepositives divided by the total number of elements labelledas belonging to the positive class Thus precision is obtainedby applying (1) that corresponds to 99 which indicates thatthe system has a high degree of precision This rate has beenachieved through collaborating fixed nodes with mobile nodes
precision = tp
tp + fp (1)
Regarding recall it indicates the number of eventscorrectly detected from those that should have been detectedHence the number of detected events of presence from the total
occurred presence has been obtained by applying expression(2) which corresponds to 1 That has been so due todeployment as explained in section 51 that allowed notonly the detection of every unauthorized crossing which isthe major goal of our surveillance-agent system but also thedetection of every perimeter intrusion from authorized staffand patient crossings
recall = tp
tp + f n (2)
54 Lessons learned
The work described in this paper is our experience with apervasive surveillance agent based on WSNs in a practicalapplication and its evaluation through an actual deploymentof motes Several lessons have been learnt from the workperformed in this research which can be applied to makingdecisions during the development of a system related topervasive surveillance The following points are someremarks that could be useful to future researchers involvedin the development and management of pervasive surveillancesystems based on WSNs
bull The sensors for deployment have to be chosen consideringthe characteristics of coverage to be modelled
bull The geographical factors of the place that will bemonitored for the detection of intrusions have to be takeninto account
bull The number of required sensors has to be calculatedin order to guarantee the expected security level fromthe sensed spatial density and the critical level of themonitored area
bull The set of information which is extracted from datathat is generated by the agent allows determiningthe weaknesses of the coverage area and discoveringvulnerabilities for hypothetical intrusion paths
6 Conclusions and future research
The work described in this paper has presented our experienceabout developing a surveillance system using WSNs forpractical applications and evaluating their deployment inthe real world A mechanism for controlling virtualperimeters using WSN that manage mobile nodes in a specificenvironment has been proposed A deployment mechanismhas been used in order to guarantee effective detection andan efficient use of motes which operate in a low powerconsumption mode in periods when events are not receivedIn addition the lsquointelligencersquo of the agent has been distributedby using mobile nodes to discern who has caused the eventof presence the client the sanatorium staff or the intruderMoreover our system has the capacity to detect more than oneauthorized person crossing the perimeter since the system isbased on intelligent distribution supported by mobile nodesThis characteristic contributes in saving both processingresources and power consumption
The deployment of this solution results in cost savingsbecause cables are not required during installation Therefore
9
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
this kind of deployment could become more spatially densethan traditional approaches Currently those mechanisms playan important role in building confidence in our environment toensure safety becoming key elements for preventing multipletypes of threats and allowing better quality of life for humans
As future research the manner how to integrate theagent in the formation of dynamic surveillance of virtualperimeters in runtime will be studied Advanced context-aware applications could be developed from this improvement(eg from livestock control to baggage logistics) It isa research challenge which could be solved by designingmulti-sensorial surveillance systems that combine differentdata sources from diverse positional sensors (eg ultrasonictransducer stereo vision laser triangulation)
Acknowledgments
The work presented in this research paper has been partiallyfunded by the VI Framework Programme of the EuropeanUnion within the μSWN lsquoSolving Major Problems in Microsensorial Wireless Networksrsquo project (code TSI-034642)The authors would like to thank the anonymous reviewersfor their valuable comments
References
[1] Garcıa-Hernandez C F Ibarguengoytia-Gonzalez P HGarcıa-Hernandez J and Perez-Dıaz J A 2007 Wirelesssensor networks and applications a survey Int J ComputSci Netw Secur 7 270
[2] Garcia M L 2008 Design and Evaluation of PhysicalProtection Systems (Portsmouth NHButterworth-Heinemann) pp 86ndash8
[3] Garcıa A B Martınez J F Lopez J M Prayati A and RedondoL 2008 Problem Solving for Wireless Sensor Networks(Computer Communications and Network Series)(London Springer) pp 177ndash207
[4] Bounabat B Romadi R and Labhalla S 1999 Designingmulti-agent reactive systems a specification method based
on reactive decisional agents Approaches to IntelligenceAgents (Berlin Springer) p 775
[5] Romadi R and Berbia H 2008 Wireless sensor network aspecification method based on reactive decisional agents3rd Int Conf on Information and CommunicationTechnologies From Theory to Applications (ICTTA 2008)pp 1ndash5
[6] Frantisek Z Jr and Frantisek Z 2008 Simulation for wirelesssensor networks with intelligent nodes 10th Int Conf onComputer Modeling and Simulation (UKSIM 2008)pp 746ndash51
[7] Wang X Bi D-W Ding L and Wang S 2007 Agentcollaborative target localization and classification WirelSensor Netw Sensors 7 1359ndash86
[8] Rogers A Corkill D D and Jennings N R 2009 Agenttechnologies for sensor networks Intell Syst IEEE24 13ndash7
[9] Byunghun S Haksoo Ch and Hyung S L 2008 Surveillancetracking system using passive infrared motion sensors inwireless sensor network Int Conf on InformationNetworking (ICOIN 2008) pp 1ndash5
[10] Li Y Y and Parker L 2008 Intruder detection using a wirelesssensor network with an intelligent mobile robot responseProc IEEE SoutheastCon (Huntsville AL USA) pp 37ndash42
[11] Zappi P Farella E and Benini L 2007 Enhancing the spatialresolution of presence detection in a PIR based wirelesssurveillance network IEEE Conf on Advanced Video andSignal Based Surveillance (AVSS 2007) pp 295ndash300
[12] Singh J Madhow U Kumar R Suri S and Cagley R 2007Tracking multiple targets using binary proximity sensorsProc 6th Int Conf on Information Processing in SensorNetworks (IPSN rsquo07) (Cambridge MA USA) (New YorkACM) pp 529ndash38
[13] Moghavvemi M and Lu Ch S 2004 Pyroelectric infraredsensor for intruder detection TENCON 2004 IEEE Region10 Conf vol 4 pp 656ndash9
[14] Boonma P and Suzuki J 2009 Toward interoperablepublishsubscribe communication between sensor networksand access networks IEEE Consumer Communications andNetworking Conf pp 1ndash6
[15] Yuan Y L and Parker L E 2008 Detecting and monitoringtime-related abnormal events using a wireless sensornetwork and mobile robot IEEE RSJ Int Conf onIntelligent Robots and Systems (IROS 2008) pp 3292ndash8
10

Meas Sci Technol 21 (2010) 124005 J F Martınez et al
Figure 6 PIR sensor deployment conditions
Figure 7 WSN-CAD surveillance application
Table 2 Consumption of hardware execution modes
Hardware Execution Currentcomponent mode consumption
TelosB mote Tx mode (0 dBm) 253 mARx mode 23 mAIdle mode 21 μA
Luminite Stand-by mode 9 μATX50040 PIR Alarm mode 20 mA
of presence during validation (see table 4) let us considera balanced distribution of those events of presence betweennodes that make up the virtual perimeter In this manner 42events of presence are counted in total (per day and node)of which 13 events are of INTRUDER PRESENCE and 29events are of BRACELET PRESENCE
Table 3 Battery supply for hardware components
Hardwarecomponent Battery Battery features
TelosB mote 4xAA (redesignedmotes)
Lithium rechargeable15 V 2900 mAh
LuminiteTX50040 PIR
1xPP3 Lithium 9 V 230 mAh
Table 4 System validation results
Use case
Classification Bracelet Intruder
True positive (tp) 4277 1125False positive (fp) 17 8False negative (fn) 0 0
521 Luminite TX50040 PIR autonomy analysis Whena Luminite TX50040 PIR is excited because of a perimetercrossing the PIR hardware turns from lsquostand byrsquo mode tolsquoalarmrsquo mode The lsquoalarm modersquo of Luminite TX50040 PIRactivates for 3 s every time it is excited The PIR therebyworks in that mode almost 1 min per day consuming 092 mAhaccording to energy data shown in tables 2 and 3 Thereforethe Luminite TX50040 PIR can autonomously work for 251days it is equivalent to detecting approximately 10 542 eventsof presence
522 TelosB mote autonomy analysis Every time fixednodes process an event of presence TelosB motes needto send two messages via radio (see figure 2) first aNODEID REQUEST publication and second a PRESENCEevent to identify the kind of detected presence Eventually ifa NODEID RESPONSE event is received from a braceletthen a BRACELET PRESENCE event is thrown to thegateway otherwise an INTRUDER PRESENCE event isthrown The node has to switch the RF transceiver onfor 8 ms in order to transmit the two necessary messages(NODEID REQUEST and PRESENCE event) and 43 ms
8
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
to receive a NODEID RESPONSE event if needed Takinginto account the TelosB mote energy characteristics as shownin tables 2 and 3 the mote consumption is 4371 mAhper day Originally TelosB mote was equipped with 2AA batteries but fixed TelosB motes were redesigned inorder to increase their autonomy by enabling two more AAbatteries From the consumption per day previously obtainedfixed TelosB motes making up the virtual perimeter canthereby autonomously work for 265 days this is equivalentto transmitting approximately 11 130 events of presence
53 Performance evaluation
In this section experimental results that evaluate theperformance of the surveillance-agent system based on WSNsdescribed in the previous section are presented
Table 4 shows the results obtained during systemvalidation The results are classified into three categoriesThe first set of results true positive (tp) refers to those eventsproperly discerned by the node indicating who crossed theperimeter During the validation test 4277 bracelets and 1125intruders were detected as true positive (ie bracelet nodes andintruders respectively)
The second set of results false positive (fp) indicates that(1) 17 bracelet accesses were detected as intruder and (2) 8intruder accesses were detected as bracelet In the case of (1)it has been concluded that the false positive was caused by adeficient radio signal of either fixed node or of the bracelet(eg reflections attenuations and interferences) which didnot allow proper communication among bracelets and fixednodes It is then not possible to exchange messages thatallow identification of the mobile node In order to avoidthis situation the characteristics of deployment in order tooptimize the performance of the PIRs have been modified Inthe case of (2) false positive was due to an intruder crossingthe perimeter when there was a bracelet in the radio coveragearea of the fixed node
Finally false negative (fn) represents those events ofpresence that occurred inside the perimeter and that were notdetected by the node False negative was 0 as in all casesan alarm was generated when the perimeter was crossed byeither an intruder or a bracelet
According to the data shown in table 4 the performancemetrics defined in [15] have been adapted in order to determineboth precision and recall of the system
In the context of this work precision indicates thepercentage of detections properly classified from the totaldetections Specifically precision is the number of truepositives divided by the total number of elements labelledas belonging to the positive class Thus precision is obtainedby applying (1) that corresponds to 99 which indicates thatthe system has a high degree of precision This rate has beenachieved through collaborating fixed nodes with mobile nodes
precision = tp
tp + fp (1)
Regarding recall it indicates the number of eventscorrectly detected from those that should have been detectedHence the number of detected events of presence from the total
occurred presence has been obtained by applying expression(2) which corresponds to 1 That has been so due todeployment as explained in section 51 that allowed notonly the detection of every unauthorized crossing which isthe major goal of our surveillance-agent system but also thedetection of every perimeter intrusion from authorized staffand patient crossings
recall = tp
tp + f n (2)
54 Lessons learned
The work described in this paper is our experience with apervasive surveillance agent based on WSNs in a practicalapplication and its evaluation through an actual deploymentof motes Several lessons have been learnt from the workperformed in this research which can be applied to makingdecisions during the development of a system related topervasive surveillance The following points are someremarks that could be useful to future researchers involvedin the development and management of pervasive surveillancesystems based on WSNs
bull The sensors for deployment have to be chosen consideringthe characteristics of coverage to be modelled
bull The geographical factors of the place that will bemonitored for the detection of intrusions have to be takeninto account
bull The number of required sensors has to be calculatedin order to guarantee the expected security level fromthe sensed spatial density and the critical level of themonitored area
bull The set of information which is extracted from datathat is generated by the agent allows determiningthe weaknesses of the coverage area and discoveringvulnerabilities for hypothetical intrusion paths
6 Conclusions and future research
The work described in this paper has presented our experienceabout developing a surveillance system using WSNs forpractical applications and evaluating their deployment inthe real world A mechanism for controlling virtualperimeters using WSN that manage mobile nodes in a specificenvironment has been proposed A deployment mechanismhas been used in order to guarantee effective detection andan efficient use of motes which operate in a low powerconsumption mode in periods when events are not receivedIn addition the lsquointelligencersquo of the agent has been distributedby using mobile nodes to discern who has caused the eventof presence the client the sanatorium staff or the intruderMoreover our system has the capacity to detect more than oneauthorized person crossing the perimeter since the system isbased on intelligent distribution supported by mobile nodesThis characteristic contributes in saving both processingresources and power consumption
The deployment of this solution results in cost savingsbecause cables are not required during installation Therefore
9
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
this kind of deployment could become more spatially densethan traditional approaches Currently those mechanisms playan important role in building confidence in our environment toensure safety becoming key elements for preventing multipletypes of threats and allowing better quality of life for humans
As future research the manner how to integrate theagent in the formation of dynamic surveillance of virtualperimeters in runtime will be studied Advanced context-aware applications could be developed from this improvement(eg from livestock control to baggage logistics) It isa research challenge which could be solved by designingmulti-sensorial surveillance systems that combine differentdata sources from diverse positional sensors (eg ultrasonictransducer stereo vision laser triangulation)
Acknowledgments
The work presented in this research paper has been partiallyfunded by the VI Framework Programme of the EuropeanUnion within the μSWN lsquoSolving Major Problems in Microsensorial Wireless Networksrsquo project (code TSI-034642)The authors would like to thank the anonymous reviewersfor their valuable comments
References
[1] Garcıa-Hernandez C F Ibarguengoytia-Gonzalez P HGarcıa-Hernandez J and Perez-Dıaz J A 2007 Wirelesssensor networks and applications a survey Int J ComputSci Netw Secur 7 270
[2] Garcia M L 2008 Design and Evaluation of PhysicalProtection Systems (Portsmouth NHButterworth-Heinemann) pp 86ndash8
[3] Garcıa A B Martınez J F Lopez J M Prayati A and RedondoL 2008 Problem Solving for Wireless Sensor Networks(Computer Communications and Network Series)(London Springer) pp 177ndash207
[4] Bounabat B Romadi R and Labhalla S 1999 Designingmulti-agent reactive systems a specification method based
on reactive decisional agents Approaches to IntelligenceAgents (Berlin Springer) p 775
[5] Romadi R and Berbia H 2008 Wireless sensor network aspecification method based on reactive decisional agents3rd Int Conf on Information and CommunicationTechnologies From Theory to Applications (ICTTA 2008)pp 1ndash5
[6] Frantisek Z Jr and Frantisek Z 2008 Simulation for wirelesssensor networks with intelligent nodes 10th Int Conf onComputer Modeling and Simulation (UKSIM 2008)pp 746ndash51
[7] Wang X Bi D-W Ding L and Wang S 2007 Agentcollaborative target localization and classification WirelSensor Netw Sensors 7 1359ndash86
[8] Rogers A Corkill D D and Jennings N R 2009 Agenttechnologies for sensor networks Intell Syst IEEE24 13ndash7
[9] Byunghun S Haksoo Ch and Hyung S L 2008 Surveillancetracking system using passive infrared motion sensors inwireless sensor network Int Conf on InformationNetworking (ICOIN 2008) pp 1ndash5
[10] Li Y Y and Parker L 2008 Intruder detection using a wirelesssensor network with an intelligent mobile robot responseProc IEEE SoutheastCon (Huntsville AL USA) pp 37ndash42
[11] Zappi P Farella E and Benini L 2007 Enhancing the spatialresolution of presence detection in a PIR based wirelesssurveillance network IEEE Conf on Advanced Video andSignal Based Surveillance (AVSS 2007) pp 295ndash300
[12] Singh J Madhow U Kumar R Suri S and Cagley R 2007Tracking multiple targets using binary proximity sensorsProc 6th Int Conf on Information Processing in SensorNetworks (IPSN rsquo07) (Cambridge MA USA) (New YorkACM) pp 529ndash38
[13] Moghavvemi M and Lu Ch S 2004 Pyroelectric infraredsensor for intruder detection TENCON 2004 IEEE Region10 Conf vol 4 pp 656ndash9
[14] Boonma P and Suzuki J 2009 Toward interoperablepublishsubscribe communication between sensor networksand access networks IEEE Consumer Communications andNetworking Conf pp 1ndash6
[15] Yuan Y L and Parker L E 2008 Detecting and monitoringtime-related abnormal events using a wireless sensornetwork and mobile robot IEEE RSJ Int Conf onIntelligent Robots and Systems (IROS 2008) pp 3292ndash8
10

Meas Sci Technol 21 (2010) 124005 J F Martınez et al
to receive a NODEID RESPONSE event if needed Takinginto account the TelosB mote energy characteristics as shownin tables 2 and 3 the mote consumption is 4371 mAhper day Originally TelosB mote was equipped with 2AA batteries but fixed TelosB motes were redesigned inorder to increase their autonomy by enabling two more AAbatteries From the consumption per day previously obtainedfixed TelosB motes making up the virtual perimeter canthereby autonomously work for 265 days this is equivalentto transmitting approximately 11 130 events of presence
53 Performance evaluation
In this section experimental results that evaluate theperformance of the surveillance-agent system based on WSNsdescribed in the previous section are presented
Table 4 shows the results obtained during systemvalidation The results are classified into three categoriesThe first set of results true positive (tp) refers to those eventsproperly discerned by the node indicating who crossed theperimeter During the validation test 4277 bracelets and 1125intruders were detected as true positive (ie bracelet nodes andintruders respectively)
The second set of results false positive (fp) indicates that(1) 17 bracelet accesses were detected as intruder and (2) 8intruder accesses were detected as bracelet In the case of (1)it has been concluded that the false positive was caused by adeficient radio signal of either fixed node or of the bracelet(eg reflections attenuations and interferences) which didnot allow proper communication among bracelets and fixednodes It is then not possible to exchange messages thatallow identification of the mobile node In order to avoidthis situation the characteristics of deployment in order tooptimize the performance of the PIRs have been modified Inthe case of (2) false positive was due to an intruder crossingthe perimeter when there was a bracelet in the radio coveragearea of the fixed node
Finally false negative (fn) represents those events ofpresence that occurred inside the perimeter and that were notdetected by the node False negative was 0 as in all casesan alarm was generated when the perimeter was crossed byeither an intruder or a bracelet
According to the data shown in table 4 the performancemetrics defined in [15] have been adapted in order to determineboth precision and recall of the system
In the context of this work precision indicates thepercentage of detections properly classified from the totaldetections Specifically precision is the number of truepositives divided by the total number of elements labelledas belonging to the positive class Thus precision is obtainedby applying (1) that corresponds to 99 which indicates thatthe system has a high degree of precision This rate has beenachieved through collaborating fixed nodes with mobile nodes
precision = tp
tp + fp (1)
Regarding recall it indicates the number of eventscorrectly detected from those that should have been detectedHence the number of detected events of presence from the total
occurred presence has been obtained by applying expression(2) which corresponds to 1 That has been so due todeployment as explained in section 51 that allowed notonly the detection of every unauthorized crossing which isthe major goal of our surveillance-agent system but also thedetection of every perimeter intrusion from authorized staffand patient crossings
recall = tp
tp + f n (2)
54 Lessons learned
The work described in this paper is our experience with apervasive surveillance agent based on WSNs in a practicalapplication and its evaluation through an actual deploymentof motes Several lessons have been learnt from the workperformed in this research which can be applied to makingdecisions during the development of a system related topervasive surveillance The following points are someremarks that could be useful to future researchers involvedin the development and management of pervasive surveillancesystems based on WSNs
bull The sensors for deployment have to be chosen consideringthe characteristics of coverage to be modelled
bull The geographical factors of the place that will bemonitored for the detection of intrusions have to be takeninto account
bull The number of required sensors has to be calculatedin order to guarantee the expected security level fromthe sensed spatial density and the critical level of themonitored area
bull The set of information which is extracted from datathat is generated by the agent allows determiningthe weaknesses of the coverage area and discoveringvulnerabilities for hypothetical intrusion paths
6 Conclusions and future research
The work described in this paper has presented our experienceabout developing a surveillance system using WSNs forpractical applications and evaluating their deployment inthe real world A mechanism for controlling virtualperimeters using WSN that manage mobile nodes in a specificenvironment has been proposed A deployment mechanismhas been used in order to guarantee effective detection andan efficient use of motes which operate in a low powerconsumption mode in periods when events are not receivedIn addition the lsquointelligencersquo of the agent has been distributedby using mobile nodes to discern who has caused the eventof presence the client the sanatorium staff or the intruderMoreover our system has the capacity to detect more than oneauthorized person crossing the perimeter since the system isbased on intelligent distribution supported by mobile nodesThis characteristic contributes in saving both processingresources and power consumption
The deployment of this solution results in cost savingsbecause cables are not required during installation Therefore
9
Meas Sci Technol 21 (2010) 124005 J F Martınez et al
this kind of deployment could become more spatially densethan traditional approaches Currently those mechanisms playan important role in building confidence in our environment toensure safety becoming key elements for preventing multipletypes of threats and allowing better quality of life for humans
As future research the manner how to integrate theagent in the formation of dynamic surveillance of virtualperimeters in runtime will be studied Advanced context-aware applications could be developed from this improvement(eg from livestock control to baggage logistics) It isa research challenge which could be solved by designingmulti-sensorial surveillance systems that combine differentdata sources from diverse positional sensors (eg ultrasonictransducer stereo vision laser triangulation)
Acknowledgments
The work presented in this research paper has been partiallyfunded by the VI Framework Programme of the EuropeanUnion within the μSWN lsquoSolving Major Problems in Microsensorial Wireless Networksrsquo project (code TSI-034642)The authors would like to thank the anonymous reviewersfor their valuable comments
References
[1] Garcıa-Hernandez C F Ibarguengoytia-Gonzalez P HGarcıa-Hernandez J and Perez-Dıaz J A 2007 Wirelesssensor networks and applications a survey Int J ComputSci Netw Secur 7 270
[2] Garcia M L 2008 Design and Evaluation of PhysicalProtection Systems (Portsmouth NHButterworth-Heinemann) pp 86ndash8
[3] Garcıa A B Martınez J F Lopez J M Prayati A and RedondoL 2008 Problem Solving for Wireless Sensor Networks(Computer Communications and Network Series)(London Springer) pp 177ndash207
[4] Bounabat B Romadi R and Labhalla S 1999 Designingmulti-agent reactive systems a specification method based
on reactive decisional agents Approaches to IntelligenceAgents (Berlin Springer) p 775
[5] Romadi R and Berbia H 2008 Wireless sensor network aspecification method based on reactive decisional agents3rd Int Conf on Information and CommunicationTechnologies From Theory to Applications (ICTTA 2008)pp 1ndash5
[6] Frantisek Z Jr and Frantisek Z 2008 Simulation for wirelesssensor networks with intelligent nodes 10th Int Conf onComputer Modeling and Simulation (UKSIM 2008)pp 746ndash51
[7] Wang X Bi D-W Ding L and Wang S 2007 Agentcollaborative target localization and classification WirelSensor Netw Sensors 7 1359ndash86
[8] Rogers A Corkill D D and Jennings N R 2009 Agenttechnologies for sensor networks Intell Syst IEEE24 13ndash7
[9] Byunghun S Haksoo Ch and Hyung S L 2008 Surveillancetracking system using passive infrared motion sensors inwireless sensor network Int Conf on InformationNetworking (ICOIN 2008) pp 1ndash5
[10] Li Y Y and Parker L 2008 Intruder detection using a wirelesssensor network with an intelligent mobile robot responseProc IEEE SoutheastCon (Huntsville AL USA) pp 37ndash42
[11] Zappi P Farella E and Benini L 2007 Enhancing the spatialresolution of presence detection in a PIR based wirelesssurveillance network IEEE Conf on Advanced Video andSignal Based Surveillance (AVSS 2007) pp 295ndash300
[12] Singh J Madhow U Kumar R Suri S and Cagley R 2007Tracking multiple targets using binary proximity sensorsProc 6th Int Conf on Information Processing in SensorNetworks (IPSN rsquo07) (Cambridge MA USA) (New YorkACM) pp 529ndash38
[13] Moghavvemi M and Lu Ch S 2004 Pyroelectric infraredsensor for intruder detection TENCON 2004 IEEE Region10 Conf vol 4 pp 656ndash9
[14] Boonma P and Suzuki J 2009 Toward interoperablepublishsubscribe communication between sensor networksand access networks IEEE Consumer Communications andNetworking Conf pp 1ndash6
[15] Yuan Y L and Parker L E 2008 Detecting and monitoringtime-related abnormal events using a wireless sensornetwork and mobile robot IEEE RSJ Int Conf onIntelligent Robots and Systems (IROS 2008) pp 3292ndash8
10

Meas Sci Technol 21 (2010) 124005 J F Martınez et al
this kind of deployment could become more spatially densethan traditional approaches Currently those mechanisms playan important role in building confidence in our environment toensure safety becoming key elements for preventing multipletypes of threats and allowing better quality of life for humans
As future research the manner how to integrate theagent in the formation of dynamic surveillance of virtualperimeters in runtime will be studied Advanced context-aware applications could be developed from this improvement(eg from livestock control to baggage logistics) It isa research challenge which could be solved by designingmulti-sensorial surveillance systems that combine differentdata sources from diverse positional sensors (eg ultrasonictransducer stereo vision laser triangulation)
Acknowledgments
The work presented in this research paper has been partiallyfunded by the VI Framework Programme of the EuropeanUnion within the μSWN lsquoSolving Major Problems in Microsensorial Wireless Networksrsquo project (code TSI-034642)The authors would like to thank the anonymous reviewersfor their valuable comments
References
[1] Garcıa-Hernandez C F Ibarguengoytia-Gonzalez P HGarcıa-Hernandez J and Perez-Dıaz J A 2007 Wirelesssensor networks and applications a survey Int J ComputSci Netw Secur 7 270
[2] Garcia M L 2008 Design and Evaluation of PhysicalProtection Systems (Portsmouth NHButterworth-Heinemann) pp 86ndash8
[3] Garcıa A B Martınez J F Lopez J M Prayati A and RedondoL 2008 Problem Solving for Wireless Sensor Networks(Computer Communications and Network Series)(London Springer) pp 177ndash207
[4] Bounabat B Romadi R and Labhalla S 1999 Designingmulti-agent reactive systems a specification method based
on reactive decisional agents Approaches to IntelligenceAgents (Berlin Springer) p 775
[5] Romadi R and Berbia H 2008 Wireless sensor network aspecification method based on reactive decisional agents3rd Int Conf on Information and CommunicationTechnologies From Theory to Applications (ICTTA 2008)pp 1ndash5
[6] Frantisek Z Jr and Frantisek Z 2008 Simulation for wirelesssensor networks with intelligent nodes 10th Int Conf onComputer Modeling and Simulation (UKSIM 2008)pp 746ndash51
[7] Wang X Bi D-W Ding L and Wang S 2007 Agentcollaborative target localization and classification WirelSensor Netw Sensors 7 1359ndash86
[8] Rogers A Corkill D D and Jennings N R 2009 Agenttechnologies for sensor networks Intell Syst IEEE24 13ndash7
[9] Byunghun S Haksoo Ch and Hyung S L 2008 Surveillancetracking system using passive infrared motion sensors inwireless sensor network Int Conf on InformationNetworking (ICOIN 2008) pp 1ndash5
[10] Li Y Y and Parker L 2008 Intruder detection using a wirelesssensor network with an intelligent mobile robot responseProc IEEE SoutheastCon (Huntsville AL USA) pp 37ndash42
[11] Zappi P Farella E and Benini L 2007 Enhancing the spatialresolution of presence detection in a PIR based wirelesssurveillance network IEEE Conf on Advanced Video andSignal Based Surveillance (AVSS 2007) pp 295ndash300
[12] Singh J Madhow U Kumar R Suri S and Cagley R 2007Tracking multiple targets using binary proximity sensorsProc 6th Int Conf on Information Processing in SensorNetworks (IPSN rsquo07) (Cambridge MA USA) (New YorkACM) pp 529ndash38
[13] Moghavvemi M and Lu Ch S 2004 Pyroelectric infraredsensor for intruder detection TENCON 2004 IEEE Region10 Conf vol 4 pp 656ndash9
[14] Boonma P and Suzuki J 2009 Toward interoperablepublishsubscribe communication between sensor networksand access networks IEEE Consumer Communications andNetworking Conf pp 1ndash6
[15] Yuan Y L and Parker L E 2008 Detecting and monitoringtime-related abnormal events using a wireless sensornetwork and mobile robot IEEE RSJ Int Conf onIntelligent Robots and Systems (IROS 2008) pp 3292ndash8
10