
Sufficiency and duality for multiobjective variational control problems with generalized ( F , α ,...
16
Nonlinear Analysis 72 (2010) 2564–2579 Contents lists available at ScienceDirect Nonlinear Analysis journal homepage: www.elsevier.com/locate/na Sufficiency and duality for multiobjective variational control problems with generalized (F ,α,ρ,θ)-V-convexity I. Ahmad a,b,* , Sarita Sharma b a Department of Mathematics and Statistics, King Fahd University of Petroleum and Minerals, P.O. Box 728, Dhahran- 31261, Saudi Arabia b Department of Mathematics, Aligarh Muslim University Aligarh -202 002, India article info Article history: Received 2 August 2009 Accepted 3 November 2009 Keywords: Multiobjective variational control problem Sufficiency Generalized (F ,α,ρ,θ)-V-convex functions Duality theorems abstract Zalmai introduced generalized (F ,α,ρ,θ)-V-convex functions, a new class of functions that unifies several concepts of generalized convex functions. In this article, the generalized (F ,α,ρ,θ)-V-convex functions are extended to variational control problem. By utilizing the new concepts, we obtain sufficient optimality conditions and prove Wolfe type and Mond–Weir type duality results for multiobjective variational control programming problem. © 2009 Elsevier Ltd. All rights reserved. 1. Introduction During the last two decades, multiobjective control problems have been considered in flight control design, in the control of space structures, in industrial process control and other diverse fields. Mond and Hanson [1] first obtained duality results for control problems under convexity, which were further extended by Mond and Smart [2] to invex functions. Bhatia and Kumar [3] derived duality theorems for multiobjective control problems under generalized ρ -invexity assumptions. Xiuhong [4] proved duality relations through a parametric approach to relate properly efficient solutions of multiobjective control problems under invexity assumptions. The objective and constraint functions in both articles were different. In [5], Gulati et al. established optimality conditions and duality results for multiobjective control problems involving generalized convexity. Nahak and Nanda [6] discussed the efficiency and duality for multiobjective variational control problems with (F ,ρ)-convexity. Recently, Nahak and Nanda [7] obtained sufficient optimality criteria and duality results for multiobjective variational control problems under V -invexity assumptions. Motivated by various concepts of generalized convexity, Liang et al. [8,9] introduced a unified formulation of generalized convexity, which was called (F ,α,ρ, d)-convexity and obtained some corresponding optimality conditions and duality results for the single objective fractional and multiobjective fractional problems. In [10], Ahmad and Husain established sufficient optimality conditions and usual duality results for a nondifferentiable minimax fractional programming with (F ,α,ρ, d)-convexity. Chinchuluun et al. [11] generalized the results of Liang et al. [9] for nondifferentiable multiobjective fractional problems. Recently, Gulati et al. [12] and Yuan et al. [13] presented unified formulation of generalized convex functions called (F ,α,ρ, d)-V-type I functions and (C ,α,ρ, d) type I functions, respectively, and discussed sufficient optimality conditions and duality results for multiobjective programming problems. In [14], Yuan et al. investigated the properties of (h,φ)-generalized gradient, and relations between (h,φ)-generalized monotocity. They also considered monotocity of some averages based on the algebraic operations under the φ-convexity assumption. In this article, by taking the motivation from Liang et al. [9] and Zalmai [15], we extend the class of generalized (F ,α,ρ,θ)-V-convex functions for multiobjective variational control problem and obtain sufficient optimality conditions * Corresponding author at: Department of Mathematics, Aligarh Muslim University, Aligarh-202 002, India. E-mail addresses: [email protected], [email protected] (I. Ahmad), [email protected] (S. Sharma). 0362-546X/$ – see front matter © 2009 Elsevier Ltd. All rights reserved. doi:10.1016/j.na.2009.11.005
Transcript of Sufficiency and duality for multiobjective variational control problems with generalized ( F , α ,...

Nonlinear Analysis 72 (2010) 2564–2579
Contents lists available at ScienceDirect
Nonlinear Analysis
journal homepage: www.elsevier.com/locate/na
Sufficiency and duality for multiobjective variational control problemswith generalized (F , α, ρ, θ)-V-convexityI. Ahmad a,b,∗, Sarita Sharma ba Department of Mathematics and Statistics, King Fahd University of Petroleum and Minerals, P.O. Box 728, Dhahran- 31261, Saudi Arabiab Department of Mathematics, Aligarh Muslim University Aligarh -202 002, India
a r t i c l e i n f o
Article history:Received 2 August 2009Accepted 3 November 2009
Keywords:Multiobjective variational control problemSufficiencyGeneralized (F , α, ρ, θ)-V-convexfunctionsDuality theorems
a b s t r a c t
Zalmai introduced generalized (F , α, ρ, θ)-V-convex functions, a new class of functionsthat unifies several concepts of generalized convex functions. In this article, the generalized(F , α, ρ, θ)-V-convex functions are extended to variational control problem. By utilizingthe new concepts, we obtain sufficient optimality conditions and prove Wolfe typeand Mond–Weir type duality results for multiobjective variational control programmingproblem.
© 2009 Elsevier Ltd. All rights reserved.
1. Introduction
During the last two decades, multiobjective control problems have been considered in flight control design, in the controlof space structures, in industrial process control and other diverse fields. Mond and Hanson [1] first obtained duality resultsfor control problems under convexity, which were further extended by Mond and Smart [2] to invex functions. Bhatiaand Kumar [3] derived duality theorems for multiobjective control problems under generalized ρ-invexity assumptions.Xiuhong [4] proved duality relations through a parametric approach to relate properly efficient solutions of multiobjectivecontrol problems under invexity assumptions. The objective and constraint functions in both articles were different. In [5],Gulati et al. established optimality conditions and duality results for multiobjective control problems involving generalizedconvexity. Nahak and Nanda [6] discussed the efficiency and duality for multiobjective variational control problems with(F , ρ)-convexity. Recently, Nahak andNanda [7] obtained sufficient optimality criteria and duality results formultiobjectivevariational control problems under V -invexity assumptions.Motivated by various concepts of generalized convexity, Liang et al. [8,9] introduced a unified formulation of generalized
convexity, which was called (F , α, ρ, d)-convexity and obtained some corresponding optimality conditions and dualityresults for the single objective fractional and multiobjective fractional problems. In [10], Ahmad and Husain establishedsufficient optimality conditions and usual duality results for a nondifferentiable minimax fractional programming with(F , α, ρ, d)-convexity. Chinchuluun et al. [11] generalized the results of Liang et al. [9] for nondifferentiable multiobjectivefractional problems. Recently, Gulati et al. [12] and Yuan et al. [13] presented unified formulation of generalized convexfunctions called (F , α, ρ, d)-V-type I functions and (C, α, ρ, d) type I functions, respectively, and discussed sufficientoptimality conditions and duality results for multiobjective programming problems. In [14], Yuan et al. investigated theproperties of (h, φ)-generalized gradient, and relations between (h, φ)-generalized monotocity. They also consideredmonotocity of some averages based on the algebraic operations under the φ-convexity assumption.In this article, by taking the motivation from Liang et al. [9] and Zalmai [15], we extend the class of generalized
(F , α, ρ, θ)-V-convex functions for multiobjective variational control problem and obtain sufficient optimality conditions
∗ Corresponding author at: Department of Mathematics, Aligarh Muslim University, Aligarh-202 002, India.E-mail addresses: [email protected], [email protected] (I. Ahmad), [email protected] (S. Sharma).
0362-546X/$ – see front matter© 2009 Elsevier Ltd. All rights reserved.doi:10.1016/j.na.2009.11.005

I. Ahmad, S. Sharma / Nonlinear Analysis 72 (2010) 2564–2579 2565
under these assumptions. Moreover, weak and strong duality theorems are proved for Wolfe and Mond–Weir type vectorduals. This work extends the earlier work of Nahak and Nanda [6,7].
2. Notations and preliminaries
Let I = [a, b] be a real interval, fi : I × Rn × Rn × Rm × Rm 7→ R, i ∈ P = {1, 2, . . . , p}, gj : I × Rn × Rn × Rm × Rm 7→R, j ∈ M = {1, 2, . . . ,m} and hk : I × Rn × Rn × Rm × Rm 7→ R, k ∈ N = {1, 2, . . . , n} be continuously differentiablefunctions. For i ∈ P , the set Pi = P−{i}. Consider the function f (t, x(t), x(t), u(t), u(t)), where t is the independent variable,x : I 7→ Rn is the state variable and u : I 7→ Rm is the control variable. u(t) is related to x(t) through the state equationh(t, x(t), x(t), u(t), u(t)) = 0, where the dot denotes the derivative with respect to t . fit , fix, fix, fiu and fiu denote the partialderivative of fi with respect to t, x, x, u and u, respectively. For instance,
fix =(∂ fi∂x1
,∂ fi∂x2
, . . . ,∂ fi∂xn
), fix =
(∂ fi∂ x1
,∂ fi∂ x2
, . . . ,∂ fi∂ xn
)fiu =
(∂ fi∂u1
,∂ fi∂u2
, . . . ,∂ fi∂un
), fiu =
(∂ fi∂ u1
,∂ fi∂ u2
, . . . ,∂ fi∂ un
).
Similarly, gjt , gjx, gjx, gju, gju and hkt , hkx, hkx, hku, hku can be defined.Let C(I, Rn) denote the space of piecewise smooth functions xwith norm ‖x‖ = ‖x‖∞+‖Dx‖∞, where the differentiation
operator D is given by
u = Dx⇔ x(t) = α +∫ t
au(s)ds,
where α is a given boundary value. Therefore, D = ddt except at discontinuities. Let X denotes the space of all piecewise
smooth functions x : I 7→ Rn and Y denotes the space of all piecewise smooth functions u : I 7→ Rm. For notationalconvenience, we use ψ(t, x, x, u, u) for ψ(t, x(t), x(t), u(t), u(t)) and α for α(x(t), x(t), u(t), u(t), x(t), ˙x(t), u(t), ˙u(t)).We consider the following multiobjective variational control problem:
(VP) Minimize∫ b
af (t, x, x, u, u)dt =
(∫ b
af1(t, x, x, u, u)dt,
∫ b
af2(t, x, x, u, u)dt, . . . ,
∫ b
afp(t, x, x, u, u)dt
)subject to
x(a) = α, x(b) = β,
g(t, x, x, u, u) ≤ 0, t ∈ I, (1)h(t, x, x, u, u) = 0, t ∈ I. (2)
Let S denotes the set of all feasible solutions of (VP),i.e.,
S = {(x, u) ∈ (X, Y ) | x(a) = α, x(b) = β, g(t, x, x, u, u) ≤ 0, h(t, x, x, u, u) = 0, t ∈ I}.
Definition 1. A point (x, u) ∈ S is said to be an efficient solution of (VP), if there exists no other point (x, u) ∈ S such that∫ b
afi(t, x, x, u, u)dt ≤
∫ b
afi(t, x, ˙x, u, ˙u)dt, ∀ i ∈ P
and ∫ b
afl(t, x, x, u, u)dt <
∫ b
afl(t, x, ˙x, u, ˙u)dt, ∀ l ∈ Pi.
Definition 2 ([16]). A point (x, u) ∈ S is said to be a weakly efficient solution of (VP), if there exists no other point (x, u) ∈ Ssuch that∫ b
afi(t, x, x, u, u)dt <
∫ b
afi(t, x, ˙x, u, ˙u)dt, ∀ i ∈ P.
Definition 3. A function F : I × Rn × Rn × Rm × Rm 7→ R is said to be sublinear in its third argument, if for anyx, x ∈ Rn, u, u ∈ Rm,
F(t, x, x, u, u; a1 + a2) ≤ F(t, x, x, u, u; a1)+ F(t, x, x, u, u; a2),F(t, x, x, u, u;αa) = α F(t, x, x, u, u; a),
for any a1, a2 ∈ Rn, α ∈ R, α ≥ 0 and a ∈ Rn.

2566 I. Ahmad, S. Sharma / Nonlinear Analysis 72 (2010) 2564–2579
Let F be a sublinear functional, and let θ : I × X × X × Y × Y 7→ R.
Definition 4. A vector function ψ(t, x, x, u, u) is said to be (F , α, ρ, θ)-V-convex at (x, u) ∈ (X, Y ), if there exist functionsαi : X × X × Y × Y 7→ R+ \ {0}, and ρi ∈ R, i ∈ P such that for all (x, u) ∈ (X, Y ) and i ∈ P ,∫ b
aψi(t, x, x, u, u)dt −
∫ b
aψi(t, x, ˙x, u, ˙u)dt ≥
∫ b
aF(t, x, x, u, u, x, ˙x, u, ˙u;αi(ψix(t, x, ˙x, u, ˙u)+ ψiu(t, x, ˙x, u, ˙u)
−D(ψix(t, x, ˙x, u, ˙u)+ ψiu(t, x, ˙x, u, ˙u))))dt +∫ b
aρiθ
2(t, x, x, u, u)dt.
Definition 5. A vector functionψ(t, x, x, u, u) is said to be (F , α, ρ, θ)-V- (strictly) pseudoconvex at (x, u) ∈ (X, Y ), if thereexist functions αi : X × X × Y × Y 7→ R+ \ {0}, i ∈ P and ρ ∈ R such that for all (x, u) ∈ (X, Y ),∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑i∈P
ψix(t, x, ˙x, u, ˙u)+∑i∈P
ψiu(t, x, ˙x, u, ˙u)
−D
(∑i∈P
ψix(t, x, ˙x, u, ˙u)+∑i∈P
ψiu(t, x, ˙x, u, ˙u)
))dt +
∫ b
aρθ2(t, x, x, u, u)dt ≥ 0
⇒
∫ b
a
∑i∈P
αiψi(t, x, x, u, u)dt(>) ≥∫ b
a
∑i∈P
αiψi(t, x, ˙x, u, ˙u)dt,
or equivalently,∫ b
a
∑i∈P
αiψi(t, x, x, u, u)dt(≤) <∫ b
a
∑i∈P
αiψi(t, x, ˙x, u, ˙u)dt
⇒
∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑i∈P
ψix(t, x, ˙x, u, ˙u)+∑i∈P
ψiu(t, x, ˙x, u, ˙u)
−D
(∑i∈P
ψix(t, x, ˙x, u, ˙u)+∑i∈P
ψiu(t, x, ˙x, u, ˙u)
))dt +
∫ b
aρθ2(t, x, x, u, u)dt < 0.
Definition 6. A vector function ψ(t, x, x, u, u) is said to be (F , α, ρ, θ)-V- (strictly) quasiconvex at (x, u) ∈ (X, Y ), if thereexist functions αi : X × X × Y × Y 7→ R+ \ {0}, i ∈ P and ρ ∈ R such that for all (x, u) ∈ (X, Y ),∫ b
a
∑i∈P
αiψi(t, x, x, u, u)dt ≤∫ b
a
∑i∈P
αiψi(t, x, ˙x, u, ˙u)dt
⇒
∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑i∈P
ψix(t, x, ˙x, u, ˙u)+∑i∈P
ψiu(t, x, ˙x, u, ˙u)
−D
(∑i∈P
ψix(t, x, ˙x, u, ˙u)+∑i∈P
ψiu(t, x, ˙x, u, ˙u)
))dt +
∫ b
aρθ2(t, x, x, u, u)dt(<) ≤ 0,
or equivalently,∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑i∈P
ψix(t, x, ˙x, u, ˙u)+∑i∈P
ψiu(t, x, ˙x, u, ˙u)
−D
(∑i∈P
ψix(t, x, ˙x, u, ˙u)+∑i∈P
ψiu(t, x, ˙x, u, ˙u)
))dt +
∫ b
aρθ2(t, x, x, u, u)dt(≥) > 0
⇒
∫ b
a
∑i∈P
αiψi(t, x, x, u, u)dt >∫ b
a
∑i∈P
αiψi(t, x, ˙x, u, ˙u)dt.

I. Ahmad, S. Sharma / Nonlinear Analysis 72 (2010) 2564–2579 2567
In order to prove strong duality theorem, we will invoke the following results.
Lemma 1 (Kuhn–Tucker Necessary Optimality Conditions). Let (x, u) solves the following single objective problem
Minimize∫ b
af (t, x, x, u, u)dt
subject to
x(a) = α, x(b) = β,
g(t, x, x, u, u) ≤ 0, t ∈ I,
h(t, x, x, u, u) = 0, t ∈ I.
If the Frechet derivative [D − Hx(x, u)] is surjective and the optimal solution (x, u) is normal, then there exist piecewise smoothfunctions µ∗ : I 7→ Rm and ν∗ : I 7→ Rn satisfying the following for all t ∈ I ,
fx(t, x, ˙x, u, ˙u)+∑j∈M
µ∗j gjx(t, x, ˙x, u, ˙u)+∑k∈N
ν∗k hkx(t, x, ˙x, u, ˙u)
= D
[fx(t, x, ˙x, u, ˙u)+
∑j∈M
µ∗j gjx(t, x, ˙x, u, ˙u)+∑k∈N
ν∗k hkx(t, x, ˙x, u, ˙u)
],
fu(t, x, ˙x, u, ˙u)+∑j∈M
µ∗j gju(t, x, ˙x, u, ˙u)+∑k∈N
ν∗k hku(t, x, ˙x, u, ˙u)
= D
[fx(t, x, ˙x, u, ˙u)+
∑j∈M
µ∗j gju(t, x, ˙x, u, ˙u)+∑k∈N
ν∗k hku(t, x, ˙x, u, ˙u)
],
µ∗g(t, x, ˙x, u, ˙u)dt = 0,
µ∗ ≥ 0.
Lemma 2 ([17]). (x, u) is an efficient solution for (VP) if and only if (x, u) solves
(VP)s Minimize∫ b
afk(t, x, x, u, u)dt
subject to x(a) = α, x(b) = β,∫ b
afi(t, x, x, u, u)dt ≤
∫ b
afi(t, x, ˙x, u, ˙u)dt, i 6= k,
g(t, x, x, u, u) ≤ 0, t ∈ I,
h(t, x, x, u, u) = 0, t ∈ I,
for all i ∈ P.
3. Sufficiency
We now present the sufficient optimality conditions for (VP) under (F , α, ρ, θ)-V-convexity/generalized convexity as-sumptions. In this section and in Section 5,
∫ ba f
λ(t, x, ˙x, u, ˙u)dt denotes the vector (∫ ba λ1f1(t, x, ˙x, u, ˙u)dt,
∫ ba λ2f2(t, x, ˙x, u,
˙u)dt, . . . ,∫ ba λpfp(t, x, ˙x, u, ˙u)dt) and
∫ ba g
µ(t, x, ˙x, u, ˙u)dt denotes the vector (∫ ba µ1g1(t, x, ˙x, u, ˙u)dt,
∫ ba µ2g2(t, x, ˙x, u, ˙u)
dt, . . . ,∫ ba µmgm(t, x, ˙x, u, ˙u)dt). Similarly,
∫ ba h
ν(t, x, ˙x, u, ˙u)dt can be defined.
Theorem 1. Let (x, u) be a feasible solution of (VP). Then, there exist λ : I 7→ Rp, µ : I 7→ Rm and ν : I 7→ Rn such that
(i)∑i∈P λifix(t, x, ˙x, u, ˙u) +
∑j∈M µjgjx(t, x, ˙x, u, ˙u) +
∑k∈N νkhkx(t, x, ˙x, u, ˙u) = D[
∑i∈P λifix(t, x, ˙x, u, ˙u) +
∑j∈M µj
gjx(t, x, ˙x, u, ˙u)+∑k∈N νkhkx(t, x, ˙x, u, ˙u)],
(ii)∑i∈P λifiu(t, x, ˙x, u, ˙u) +
∑j∈M µjgju(t, x, ˙x, u, ˙u) +
∑k∈N νkhku(t, x, ˙x, u, ˙u) = D[
∑i∈P λifiu(t, x, ˙x, u, ˙u) +
∑j∈M µj
gju(t, x, ˙x, u, ˙u)+∑k∈N νkhku(t, x, ˙x, u, ˙u)],
(iii)∫ ba
∑j∈M µjgj(t, x, ˙x, u, ˙u)dt = 0,
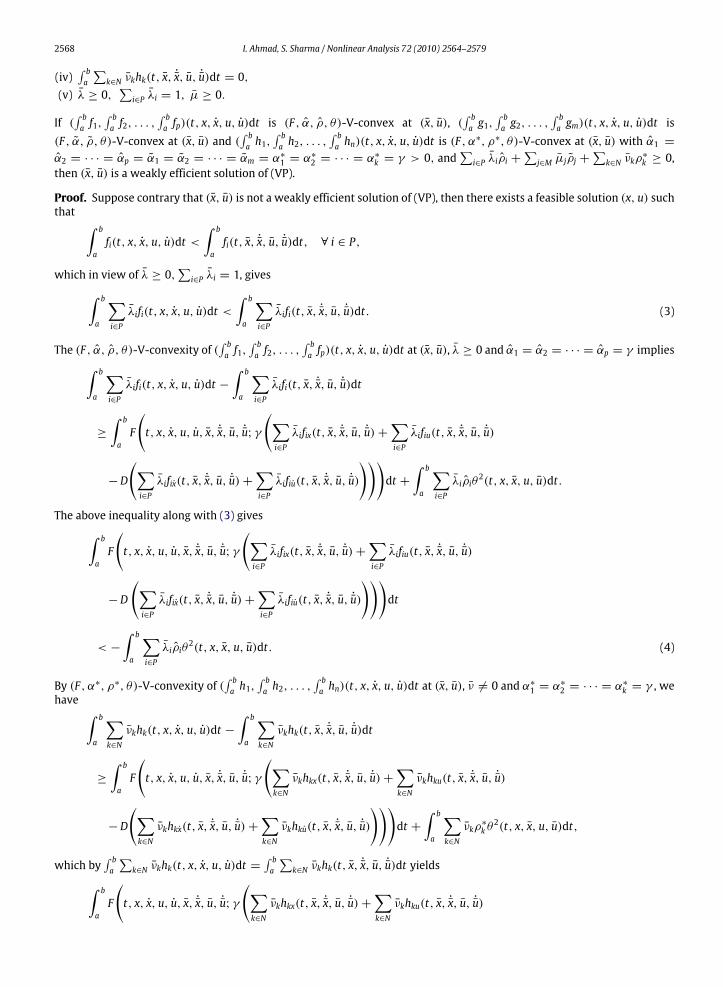
2568 I. Ahmad, S. Sharma / Nonlinear Analysis 72 (2010) 2564–2579
(iv)∫ ba
∑k∈N νkhk(t, x, ˙x, u, ˙u)dt = 0,
(v) λ ≥ 0,∑i∈P λi = 1, µ ≥ 0.
If (∫ ba f1,
∫ ba f2, . . . ,
∫ ba fp)(t, x, x, u, u)dt is (F , α, ρ, θ)-V-convex at (x, u), (
∫ ba g1,
∫ ba g2, . . . ,
∫ ba gm)(t, x, x, u, u)dt is
(F , α, ρ, θ)-V-convex at (x, u) and (∫ ba h1,
∫ ba h2, . . . ,
∫ ba hn)(t, x, x, u, u)dt is (F , α
∗, ρ∗, θ)-V-convex at (x, u) with α1 =α2 = · · · = αp = α1 = α2 = · · · = αm = α
∗
1 = α∗
2 = · · · = α∗
k = γ > 0, and∑i∈P λiρi +
∑j∈M µjρj +
∑k∈N νkρ
∗
k ≥ 0,then (x, u) is a weakly efficient solution of (VP).
Proof. Suppose contrary that (x, u) is not a weakly efficient solution of (VP), then there exists a feasible solution (x, u) suchthat ∫ b
afi(t, x, x, u, u)dt <
∫ b
afi(t, x, ˙x, u, ˙u)dt, ∀ i ∈ P,
which in view of λ ≥ 0,∑i∈P λi = 1, gives∫ b
a
∑i∈P
λifi(t, x, x, u, u)dt <∫ b
a
∑i∈P
λifi(t, x, ˙x, u, ˙u)dt. (3)
The (F , α, ρ, θ)-V-convexity of (∫ ba f1,
∫ ba f2, . . . ,
∫ ba fp)(t, x, x, u, u)dt at (x, u), λ ≥ 0 and α1 = α2 = · · · = αp = γ implies∫ b
a
∑i∈P
λifi(t, x, x, u, u)dt −∫ b
a
∑i∈P
λifi(t, x, ˙x, u, ˙u)dt
≥
∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u; γ
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
−D
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
)))dt +
∫ b
a
∑i∈P
λiρiθ2(t, x, x, u, u)dt.
The above inequality along with (3) gives∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u; γ
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
−D
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
)))dt
< −
∫ b
a
∑i∈P
λiρiθ2(t, x, x, u, u)dt. (4)
By (F , α∗, ρ∗, θ)-V-convexity of (∫ ba h1,
∫ ba h2, . . . ,
∫ ba hn)(t, x, x, u, u)dt at (x, u), ν 6= 0 and α
∗
1 = α∗
2 = · · · = α∗
k = γ , wehave ∫ b
a
∑k∈N
νkhk(t, x, x, u, u)dt −∫ b
a
∑k∈N
νkhk(t, x, ˙x, u, ˙u)dt
≥
∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u; γ
(∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
−D
(∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
)))dt +
∫ b
a
∑k∈N
νkρ∗
k θ2(t, x, x, u, u)dt,
which by∫ ba
∑k∈N νkhk(t, x, x, u, u)dt =
∫ ba
∑k∈N νkhk(t, x, ˙x, u, ˙u)dt yields∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u; γ
(∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)

I. Ahmad, S. Sharma / Nonlinear Analysis 72 (2010) 2564–2579 2569
−D
(∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
)))dt
≤ −
∫ b
a
∑k∈N
νkρ∗
k θ2(t, x, x, u, u)dt. (5)
Summing (4) and (5) and using the sublinearity of F , we obtain∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u; γ
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
−D
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
)+
∑k∈N
νkhkx(t, x, ˙x, u, ˙u)
+
∑k∈N
νkhku(t, x, ˙x, u, ˙u)− D
(∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
)))dt
< −
∫ b
a
(∑i∈P
λiρi +∑k∈N
νkρ∗
k
)θ2(t, x, x, u, u)dt.
Since∑i∈P λiρi +
∑j∈M µjρj +
∑k∈N νkρ
∗
k ≥ 0 and γ > 0, we have∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
−D
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
)+
∑k∈N
νkhkx(t, x, ˙x, u, ˙u)
+
∑k∈N
νkhku(t, x, ˙x, u, ˙u)− D
(∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
))dt
<
∫ b
a
∑j∈M
µjρj
γθ2(t, x, x, u, u)dt. (6)
Now assumptions (i) and (ii) together with sublinearity of F yield
0 =∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
−D
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
)+
∑k∈N
νkhkx(t, x, ˙x, u, ˙u)
+
∑k∈N
νkhku(t, x, ˙x, u, ˙u)− D
(∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
)
+
∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)− D
(∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)
))dt
≤
∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
−D
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
)+
∑k∈N
νkhkx(t, x, ˙x, u, ˙u)

2570 I. Ahmad, S. Sharma / Nonlinear Analysis 72 (2010) 2564–2579
+
∑k∈N
νkhku(t, x, ˙x, u, ˙u)− D
(∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
))dt
+
∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)
−D
(∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)
))dt. (7)
In view of (6), the above inequality implies∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)
−D
(∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)
))dt +
∫ b
a
∑j∈M
µjρj
γθ2(t, x, x, u, u)dt > 0. (8)
The (F , α, ρ, θ)-V-convexity of (∫ ba g1,
∫ ba g2, . . . ,
∫ ba gm)(t, x, x, u, u)dt at (x, u), µ ≥ 0 and α1 = α2 = · · · = αm = γ
yields∫ b
a
∑j∈M
µjgj(t, x, x, u, u)dt −∫ b
a
∑j∈M
µjgj(t, x, ˙x, u, ˙u)dt
≥
∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u; γ
(∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)
−D
(∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)
)))dt +
∫ b
a
∑j∈M
µjρjθ2(t, x, x, u, u)dt.
Since∫ ba
∑j∈M µjgj(t, x, x, u, u)dt ≤
∫ ba
∑j∈M µjgj(t, x, ˙x, u, ˙u)dt and γ > 0, we get∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)
−D
(∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)
))dt +
∫ b
a
∑j∈M
µjρj
γθ2(t, x, x, u, u)dt ≤ 0,
which contradicts (8). Hence, (x, u) is a weakly efficient solution of (VP). �
Remark 1. Ifwe replace (F , α, ρ, θ)-V-convexity of (∫ ba f1,
∫ ba f2, . . . ,
∫ ba fp)(t, x, x, u, u)dt by strict (F , α, ρ, θ)-V-convexity
of (∫ ba f1,
∫ ba f2, . . . ,
∫ ba fp)(t, x, x, u, u)dt , then we get stronger result that (x, u) is an efficient solution of (VP). The theorem
is stated below and the proof follows on the similar lines of above theorem.
Theorem 2. Let (x, u) be a feasible solution of (VP). Then, there exist λ : I 7→ Rp, µ : I 7→ Rm and ν : I 7→ Rn satisfying (i) to (v).If (∫ ba f1,
∫ ba f2, . . . ,
∫ ba fp)(t, x, x, u, u)dt is strictly (F , α, ρ, θ)-V-convex at (x, u), (
∫ ba g1,
∫ ba g2, . . . ,
∫ ba gm)(t, x, x, u, u)dt is
(F , α, ρ, θ)-V-convex at (x, u), and (∫ ba h1,
∫ ba h2, . . . ,
∫ ba hn)(t, x, x, u, u)dt is (F , α
∗, ρ∗, θ)-V-convex at (x, u) with α1 =α2 = · · · = αp = α1 = α2 = · · · = αm = α
∗
1 = α∗
2 = · · · = α∗
k = γ > 0, and∑i∈P λiρi +
∑j∈M µjρj +
∑k∈N νkρ
∗
k ≥ 0,then (x, u) is an efficient solution of (VP).
Theorem 3. Let (x, u) be a feasible solution of (VP). Then, there exist λ : I 7→ Rp, µ : I 7→ Rm and ν : I 7→ Rn satisfying (i) to (v).If∫ ba f
λ(t, x, x, u, u)dt is (F , α, ρ, θ)-V-pseudoconvex at (x, u),∫ ba g
µ(t, x, x, u, u)dt is (F , α, ρ, θ)-V-quasiconvex at (x, u) and∫ ba h
ν(t, x, x, u, u)dt is (F , α∗, ρ∗, θ)-V-quasiconvex at (x, u) with ρ + ρ + ρ∗ ≥ 0, then (x, u) is a weakly efficient solutionof (VP).
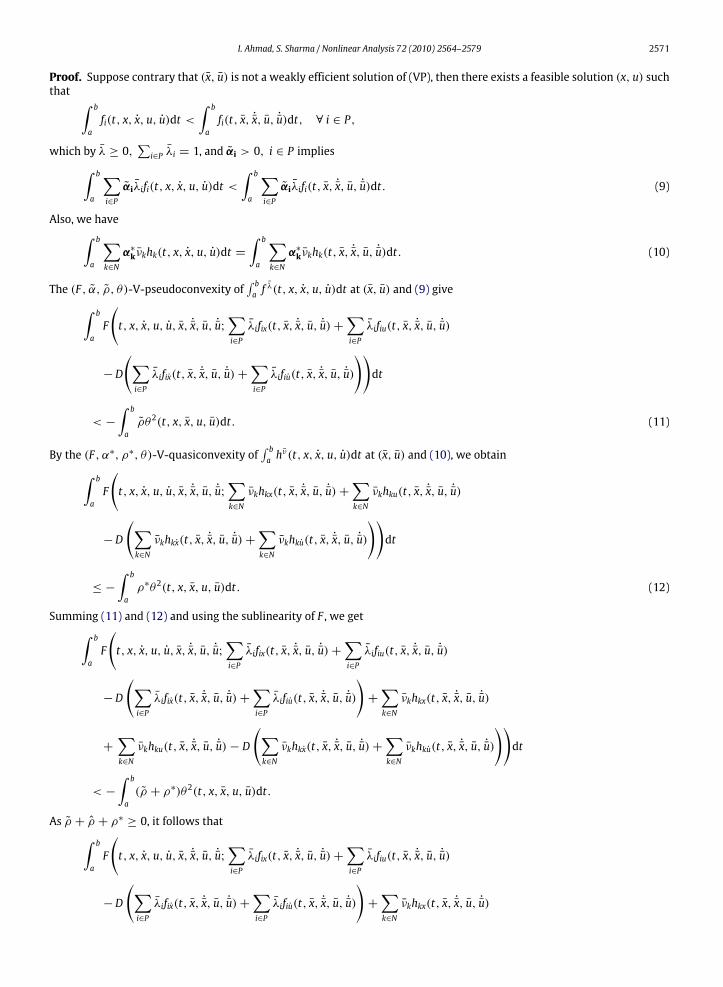
I. Ahmad, S. Sharma / Nonlinear Analysis 72 (2010) 2564–2579 2571
Proof. Suppose contrary that (x, u) is not a weakly efficient solution of (VP), then there exists a feasible solution (x, u) suchthat ∫ b
afi(t, x, x, u, u)dt <
∫ b
afi(t, x, ˙x, u, ˙u)dt, ∀ i ∈ P,
which by λ ≥ 0,∑i∈P λi = 1, and αi > 0, i ∈ P implies∫ b
a
∑i∈P
αiλifi(t, x, x, u, u)dt <∫ b
a
∑i∈P
αiλifi(t, x, ˙x, u, ˙u)dt. (9)
Also, we have∫ b
a
∑k∈N
α∗kνkhk(t, x, x, u, u)dt =∫ b
a
∑k∈N
α∗kνkhk(t, x, ˙x, u, ˙u)dt. (10)
The (F , α, ρ, θ)-V-pseudoconvexity of∫ ba f
λ(t, x, x, u, u)dt at (x, u) and (9) give∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
−D
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
))dt
< −
∫ b
aρθ2(t, x, x, u, u)dt. (11)
By the (F , α∗, ρ∗, θ)-V-quasiconvexity of∫ ba h
ν(t, x, x, u, u)dt at (x, u) and (10), we obtain∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
−D
(∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
))dt
≤ −
∫ b
aρ∗θ2(t, x, x, u, u)dt. (12)
Summing (11) and (12) and using the sublinearity of F , we get∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
−D
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
)+
∑k∈N
νkhkx(t, x, ˙x, u, ˙u)
+
∑k∈N
νkhku(t, x, ˙x, u, ˙u)− D
(∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
))dt
< −
∫ b
a(ρ + ρ∗)θ2(t, x, x, u, u)dt.
As ρ + ρ + ρ∗ ≥ 0, it follows that∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
−D
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
)+
∑k∈N
νkhkx(t, x, ˙x, u, ˙u)

2572 I. Ahmad, S. Sharma / Nonlinear Analysis 72 (2010) 2564–2579
+
∑k∈N
νkhku(t, x, ˙x, u, ˙u)− D
(∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
))dt
<
∫ b
aρθ2(t, x, x, u, u)dt. (13)
The inequality (13) along with (7) gives∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)
−D
(∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)
))dt +
∫ b
aρθ2(t, x, x, u, u)dt > 0,
which by (F , α, ρ, θ)-V-quasiconvexity of∫ ba g
µ(t, x, x, u, u)dt at (x, u) yields∫ b
a
∑j∈M
αjµjgj(t, x, x, u, u)dt >∫ b
a
∑j∈M
αjµjgj(t, x, ˙x, u, ˙u)dt.
A contradiction to∫ b
a
∑j∈M
µjgj(t, x, x, u, u)dt ≤∫ b
a
∑j∈M
µjgj(t, x, ˙x, u, ˙u)dt
and αj > 0, j ∈ M . �
Theorem 4. Let (x, u) be a feasible solution of (VP). Then, there exist λ : I 7→ Rp, µ : I 7→ Rm and ν : I 7→ Rn satisfying (i) to (v).If∫ ba f
λ(t, x, x, u, u)dt is (F , α, ρ, θ)-V-strictly quasiconvex at (x, u),∫ ba g
µ(t, x, x, u, u)dt is (F , α, ρ, θ)-V-quasiconvex at(x, u), and
∫ ba h
ν(t, x, x, u, u)dt is (F , α∗, ρ∗, θ)-V-quasiconvex at (x, u) with ρ + ρ + ρ∗ ≥ 0, then (x, u) is an efficientsolution of (VP).
Proof. Suppose contrary that (x, u) is not an efficient solution of (VP), then there exists a feasible solution (x, u) such that∫ b
afi(t, x, x, u, u)dt ≤
∫ b
afi(t, x, ˙x, u, ˙u)dt, ∀ i ∈ P
and ∫ b
afl(t, x, x, u, u)dt <
∫ b
afl(t, x, ˙x, u, ˙u)dt, ∀ l ∈ Pi,
which by λ ≥ 0,∑i∈P λi = 1 and αi > 0, i ∈ P give∫ b
a
∑i∈P
αiλifi(t, x, x, u, u)dt ≤∫ b
a
∑i∈P
αiλifi(t, x, ˙x, u, ˙u)dt. (14)
The (F , α, ρ, θ)-V- strict quasiconvexity of∫ ba f
λ(t, x, x, u, u)dt at (x, u) and (14) yields∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
−D
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
))dt
< −
∫ b
aρθ2(t, x, x, u, u)dt,
which is precisely (11). Therefore, the remaining proof follows on the similar lines of Theorem 3. �

I. Ahmad, S. Sharma / Nonlinear Analysis 72 (2010) 2564–2579 2573
4. Wolfe type vector duality
This section deals with the following Wolfe type dual program (WD) of (VP) and related weak and strong dualitytheorems.
(WD) Maximize(∫ b
a(f1(t, x, ˙x, u, ˙u)+ µTg(t, x, ˙x, u, ˙u))dt, . . . ,
∫ b
a(fp(t, x, ˙x, u, ˙u)+ µTg(t, x, ˙x, u, ˙u))dt
)subject to
x(a) = α, x(b) = β,∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑k∈N
νkhkx(t, x, ˙x, u, ˙u)
= D
[∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑k∈N
νkhkx(t, x, ˙x, u, ˙u)
], (15)
∑i∈P
λifiu(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
= D
[∑i∈P
λifiu(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
], (16)
∫ b
a
∑k∈N
νkhk(t, x, ˙x, u, ˙u)dt = 0, (17)
λ ≥ 0,∑i∈P
λi = 1, µ ≥ 0, λ ∈ Rp, µ ∈ Rm, ν ∈ Rn.
Theorem 5 (Weak Duality). Let (x, u) and (x, u, λ, µ, ν) be the feasible solutions of (VP) and (WD), respectively. If
(i) (∫ ba f1,
∫ ba f2, . . . ,
∫ ba fp)(t, x, x, u, u)dt is (F , α, ρ, θ)-V-convex at (x, u);
(ii) (∫ ba g1,
∫ ba g2, . . . ,
∫ ba gm)(t, x, x, u, u)dt is (F , α, ρ, θ)-V-convex at (x, u);
(iii) (∫ ba h1,
∫ ba h2, . . . ,
∫ ba hn)(t, x, x, u, u)dt is (F , α
∗, ρ∗, θ)-V-convex at (x, u);(iv) α1 = α2 = · · · = αp = α1 = α2 = · · · = αm = α∗1 = α
∗
2 = · · · = α∗
k = γ > 0;(v) either (a) λ > 0,
∑i∈P λiρi +
∑j∈M µjρj +
∑k∈N νkρ
∗
k ≥ 0, or(b)
∑i∈P λiρi +
∑j∈M µjρj +
∑k∈N νkρ
∗
k > 0,
then ∫ b
afi(t, x, x, u, u)dt ≤
∫ b
a
(fi(t, x, ˙x, u, ˙u)+
∑j∈M
µjgj(t, x, ˙x, u, ˙u)
)dt, ∀ i ∈ P, (18)
and ∫ b
afl(t, x, x, u, u)dt <
∫ b
a
(fl(t, x, ˙x, u, ˙u)+
∑j∈M
µjgj(t, x, ˙x, u, ˙u)
)dt, ∀ l ∈ Pi (19)
cannot hold.
Proof. Suppose contrary that (18) and (19) hold. Then in view of λ > 0, we get∫ b
a
∑i∈P
λifi(t, x, x, u, u)dt <∫ b
a
∑i∈P
λi
(fi(t, x, ˙x, u, ˙u)+
∑j∈M
µjgj(t, x, ˙x, u, ˙u)
)dt,
which along with µ ≥ 0, g(t, x, x, u, u) ≤ 0 and∑i∈P λi = 1 implies∫ b
a
(∑i∈P
λifi(t, x, x, u, u)+∑j∈M
µjgj(t, x, x, u, u)
)dt <
∫ b
a
(∑i∈P
λifi(t, x, ˙x, u, ˙u)+∑j∈M
µjgj(t, x, ˙x, u, ˙u)
)dt. (20)

2574 I. Ahmad, S. Sharma / Nonlinear Analysis 72 (2010) 2564–2579
By hypothesis (i), (iv) and λ > 0, it follows that∫ b
a
∑i∈P
λifi(t, x, x, u, u)dt −∫ b
a
∑i∈P
λifi(t, x, ˙x, u, ˙u)dt
≥
∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u; γ
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
−D
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
)))dt +
∫ b
a
∑i∈P
λiρiθ2(t, x, x, u, u)dt. (21)
From (2) and (17) and ν 6= 0, we obtain∫ b
a
∑k∈N
νkhk(t, x, x, u, u)dt = 0 =∫ b
a
∑k∈N
νkhk(t, x, ˙x, u, ˙u)dt. (22)
Now hypothesis (ii) and (iii) together with µ ≥ 0, ν 6= 0 and (iv) imply that∫ b
a
∑j∈M
µjgj(t, x, x, u, u)dt −∫ b
a
∑j∈M
µjgj(t, x, ˙x, u, ˙u)dt
≥
∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u; γ
(∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)
−D
(∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)
)))dt +
∫ b
a
∑j∈M
µjρjθ2(t, x, x, u, u)dt, (23)
and ∫ b
a
∑k∈N
νkhk(t, x, x, u, u)dt −∫ b
a
∑k∈N
νkhk(t, x, ˙x, u, ˙u)dt
≥
∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u; γ
(∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
−D
(∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
)))dt +
∫ b
a
∑k∈N
νkρ∗
k θ2(t, x, x, u, u)dt. (24)
Using (22) in (24), we have
0 ≥∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u; γ
(∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
−D
(∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
)))dt +
∫ b
a
∑k∈N
νkρ∗
k θ2(t, x, x, u, u)dt. (25)
Adding (21), (23) and (25), and by the sublinearity of F , we get∫ b
a
(∑i∈P
λifi(t, x, x, u, u)+∑j∈M
µjgj(t, x, x, u, u)
)dt −
∫ b
a
(∑i∈P
λifi(t, x, ˙x, u, ˙u)+∑j∈M
µjgj(t, x, ˙x, u, ˙u)
)dt
≥
∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u; γ
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
−D
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
)+
∑k∈N
νkhkx(t, x, ˙x, u, ˙u)

I. Ahmad, S. Sharma / Nonlinear Analysis 72 (2010) 2564–2579 2575
+
∑k∈N
νkhku(t, x, ˙x, u, ˙u)− D
(∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
)
+
∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)− D
(∑j∈M
µjgjx(t, x, ˙x, u, ˙u)
+
∑j∈M
µjgju(t, x, ˙x, u, ˙u)
)))dt +
(∑i∈P
λiρi +∑j∈M
µjρj +∑k∈N
νkρ∗
k
)∫ b
aθ2(t, x, x, u, u)dt,
≥
∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u; γ
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
−D
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
)+
∑k∈N
νkhkx(t, x, ˙x, u, ˙u)
+
∑k∈N
νkhku(t, x, ˙x, u, ˙u)− D
(∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
)
+
∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)− D
(∑j∈M
µjgjx(t, x, ˙x, u, ˙u)
+
∑j∈M
µjgju(t, x, ˙x, u, ˙u)
)))dt, (by hyp. (a)), (26)
which in view of (15) and (16) and sublinearity of F implies that∫ b
a
(∑i∈P
λifi(t, x, x, u, u)+∑j∈M
µjgj(t, x, x, u, u)
)dt ≥
∫ b
a
(∑i∈P
λifi(t, x, ˙x, u, ˙u)+∑j∈M
µjgj(t, x, ˙x, u, ˙u)
)dt.
A contradiction to (20).As assumption (b) holds, we get inequality instead of strict inequality in (20) and strict inequality instead of inequality
in (26). Therefore, we again get a contradiction to (20). �
Theorem 6 (Strong Duality). Let (x, u) be an efficient solution for (VP) at which a constraint qualification is satisfied. Then, thereexist λ ∈ Rp and piecewise smooth µ : I 7→ Rm and ν : I 7→ Rn such that (x, u, λ, µ, ν) is feasible for (WD). Further, if weakduality (Theorem 5) holds between (VP) and (WD), then (x, u, λ, µ, ν) is an efficient solution for (WD).Proof. Since (x, u) is an efficient solution for (VP), then from Lemma 2, (x, u) solves (VP)s. As (x, u) satisfies the constraintqualification for (VP)s, it follows from Lemma 1 that there exist piecewise smooth λ∗ ∈ Rp−1, µ∗ : I 7→ Rm and ν∗ : I 7→ Rnsuch that for all t ∈ I ,
fkx(t, x, ˙x, u, ˙u)+p∑i=1i6=k
λ∗i fix(t, x, ˙x, u, ˙u)+∑j∈M
µ∗j gjx(t, x, ˙x, u, ˙u)+∑k∈N
ν∗k hkx(t, x, ˙x, u, ˙u)
= D
fkx(t, x, ˙x, u, ˙u)+ p∑i=1i6=k
λ∗i fix(t, x, ˙x, u, ˙u)+∑j∈M
µ∗j gjx(t, x, ˙x, u, ˙u)+∑k∈N
ν∗k hkx(t, x, ˙x, u, ˙u)
,fku(t, x, ˙x, u, ˙u)+
p∑i=1i6=k
λ∗i fiu(t, x, ˙x, u, ˙u)+∑j∈M
µ∗j gju(t, x, ˙x, u, ˙u)+∑k∈N
ν∗k hku(t, x, ˙x, u, ˙u)
= D
fku(t, x, ˙x, u, ˙u)+ p∑i=1i6=k
λ∗i fiu(t, x, ˙x, u, ˙u)+∑j∈M
µ∗j gju(t, x, ˙x, u, ˙u)+∑k∈N
ν∗k hku(t, x, ˙x, u, ˙u)
,µ∗Tg(t, x, ˙x, u, ˙u)dt = 0,

2576 I. Ahmad, S. Sharma / Nonlinear Analysis 72 (2010) 2564–2579
µ∗ ≥ 0.
Let 1α= 1+
∑pi=1i6=kλ∗i . Then, we get∑
i∈P
λifix(t, x, ˙x, u, ˙u)+∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑k∈N
νkhkx(t, x, ˙x, u, ˙u)
= D
[∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑k∈N
νkhkx(t, x, ˙x, u, ˙u)
],
∑i∈P
λifiu(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
= D
[∑i∈P
λifiu(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
],
µTg(t, x, ˙x, u, ˙u)dt = 0,
µ ≥ 0,
where, λk = α > 0, λi = α∑i∈P λ
∗
i , i 6= k,∑j∈M µj = α
∑j∈M µ
∗
j ,∑k∈N νk = α
∑k∈N ν
∗
k .
Also, from (2), we have∫ ba
∑k∈N νkhk(t, x, ˙x, u, ˙u) = 0. Therefore, (x, u, λ, µ, ν) is a feasible solution for (WD).
Assume that (x, u, λ, µ, ν) is not an efficient solution for (WD). Then, there exists a feasible solution (x, u, λ, µ, ν) for(WD) such that∫ b
a(fi(t, x, x, u, u)+ µTg(t, x, x, u, u))dt ≥
∫ b
a(fi(t, x, ˙x, u, ˙u)+ µTg(t, x, ˙x, u, ˙u))dt, ∀i ∈ P,∫ b
a(fl(t, x, x, u, u)+ µTg(t, x, x, u, u))dt >
∫ b
a(fl(t, x, ˙x, u, ˙u)+ µTg(t, x, ˙x, u, ˙u))dt, ∀l ∈ Pi.
Since µTg(t, x, ˙x, u, ˙u) = 0, we have∫ b
a(fi(t, x, x, u, u)+ µTg(t, x, x, u, u))dt ≥
∫ b
afi(t, x, ˙x, u, ˙u)dt, ∀i ∈ P,∫ b
a(fl(t, x, x, u, u)+ µTg(t, x, x, u, u))dt >
∫ b
afl(t, x, ˙x, u, ˙u)dt, ∀l ∈ Pi,
which contradicts weak duality (Theorem 5). Hence, (x, u, λ, µ, ν) is an efficient solution for (WD). �
5. Mond–Weir type vector duality
In this section, we present the followingMond–Weir type dual program (MD) for (VP) and proveweak and strong dualitytheorems.
(MD)Maximize(∫ b
af1(t, x, ˙x, u, ˙u)dt, . . . ,
∫ b
afp(t, x, ˙x, u, ˙u)dt
)subject to
x(a) = α, x(b) = β,∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑k∈N
νkhkx(t, x, ˙x, u, ˙u)
= D
[∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑k∈N
νkhkx(t, x, ˙x, u, ˙u)
], (27)
∑i∈P
λifiu(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)

I. Ahmad, S. Sharma / Nonlinear Analysis 72 (2010) 2564–2579 2577
= D
[∑i∈P
λifiu(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
], (28)
∫ b
a
∑j∈M
µjgj(t, x, ˙x, u, ˙u)dt ≥ 0, (29)
∫ b
a
∑k∈N
νkhk(t, x, ˙x, u, ˙u)dt = 0, (30)
λ ≥ 0,∑i∈P
λi = 1, µ ≥ 0, λ ∈ Rp, µ ∈ Rm, ν ∈ Rn.
Theorem 7 (Weak Duality). Let (x, u) and (x, u, λ, µ, ν) be the feasible solutions of (VP) and (MD), respectively. If
(i)∫ ba f
λ(t, x, x, u, u)dt is (F , α, ρ, θ)-V-pseudoconvex at (x, u);(ii)
∫ ba g
µ(t, x, x, u, u)dt is (F , α, ρ, θ)-V-quasiconvex at (x, u);(iii)
∫ ba h
ν(t, x, x, u, u)dt is (F , α∗, ρ∗, θ)-V-quasiconvex at (x, u); and(iv) λ > 0, ρ + ρ + ρ∗ ≥ 0,then ∫ b
afi(t, x, x, u, u)dt ≤
∫ b
afi(t, x, ˙x, u, ˙u)dt, ∀ i ∈ P, (31)
and ∫ b
afl(t, x, x, u, u)dt <
∫ b
afl(t, x, ˙x, u, ˙u)dt, ∀ l ∈ Pi (32)
cannot hold.
Proof. Suppose contrary that (31) and (32) hold. Then, by λ > 0 and αi > 0, i ∈ P , we get∫ b
a
∑i∈P
αiλifi(t, x, x, u, u)dt <∫ b
a
∑i∈P
αiλifi(t, x, ˙x, u, ˙u)dt, (33)
which along with hypothesis (i) gives∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
−D
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
))dt +
∫ b
aρθ2(t, x, x, u, u)dt < 0. (34)
From (1) and (29), µ ≥ 0 and αj > 0, j ∈ M , we have∫ b
a
∑j∈M
αjµjgj(t, x, x, u, u)dt ≤∫ b
a
∑j∈M
αjµjgj(t, x, ˙x, u, ˙u)dt, (35)
and from (2) and (30), ν 6= 0 and α∗k > 0, k ∈ N , we get∫ b
a
∑k∈N
α∗kνkhk(t, x, x, u, u)dt =∫ b
a
∑k∈N
α∗kνkhk(t, x, ˙x, u, ˙u)dt. (36)
The inequality (33) together with hypothesis (ii) implies∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)
−D
(∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)
))dt +
∫ b
aρθ2(t, x, x, u, u)dt ≤ 0. (37)

2578 I. Ahmad, S. Sharma / Nonlinear Analysis 72 (2010) 2564–2579
Also, from (36) and hypothesis (iii) yields∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
−D
(∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)
))dt +
∫ b
aρ∗θ2(t, x, x, u, u)dt ≤ 0. (38)
Adding (34), (37) and (38) and using the sublinearity of F , we get∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
−D
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
)+
∑j∈M
µjgjx(t, x, ˙x, u, ˙u)
+
∑j∈M
µjgju(t, x, ˙x, u, ˙u)− D
(∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)
)
+
∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)− D
(∑k∈N
νkhkx(t, x, ˙x, u, ˙u)
+
∑k∈N
νkhku(t, x, ˙x, u, ˙u)
))dt + (ρ + ρ + ρ∗)
∫ b
aθ2(t, x, x, u, u)dt < 0.
As hypothesis (iv) holds, we have∫ b
aF
(t, x, x, u, u, x, ˙x, u, ˙u;
∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u)
−D
(∑i∈P
λifix(t, x, ˙x, u, ˙u)+∑i∈P
λifiu(t, x, ˙x, u, ˙u))+∑j∈M
µjgjx(t, x, ˙x, u, ˙u)
+
∑j∈M
µjgju(t, x, ˙x, u, ˙u)− D
(∑j∈M
µjgjx(t, x, ˙x, u, ˙u)+∑j∈M
µjgju(t, x, ˙x, u, ˙u)
)
+
∑k∈N
νkhkx(t, x, ˙x, u, ˙u)+∑k∈N
νkhku(t, x, ˙x, u, ˙u)− D
(∑k∈N
νkhkx(t, x, ˙x, u, ˙u)
+
∑k∈N
νkhku(t, x, ˙x, u, ˙u)
))dt < 0,
a contradiction to (26) and (27) as F(t, x, x, u, u, x, ˙x, u, ˙u; 0) = 0. �
Theorem 8 (Weak Duality). Let (x, u) and (x, u, λ, µ, ν) be the feasible solutions of (VP) and (MD), respectively. If
(i)∫ ba f
λ(t, x, x, u, u)dt is (F , α, ρ, θ)-V-strictly quasiconvex at (x, u);(ii)
∫ ba g
µ(t, x, x, u, u)dt is (F , α, ρ, θ)-V-quasiconvex at (x, u);(iii)
∫ ba h
ν(t, x, x, u, u)dt is (F , α∗, ρ∗, θ)-V-quasiconvex at (x, u); and(iv) ρ + ρ + ρ∗ ≥ 0,then (8) and (9) cannot hold.
Proof. The proof follows on the similar lines of Theorem 7. �
Theorem 9 (Strong Duality). Let (x, u) be an efficient solution for (VP) at which a constraint qualification is satisfied. Then, thereexist λ ∈ Rp and piecewise smooth µ : I 7→ Rm and ν : I 7→ Rn such that (x, u, λ, µ, ν) is feasible for (MD). Further, if any ofthe weak duality theorem holds between (VP) and (MD), then (x, u, λ, µ, ν) is an efficient solution for (MD).
I. Ahmad, S. Sharma / Nonlinear Analysis 72 (2010) 2564–2579 2579
Proof. The proof follows along the lines of Theorem 6 of Section 4. �
References
[1] B. Mond, M.A. Hanson, Duality for control problems, SIAM J. Control 6 (1968) 114–120.[2] B. Mond, I. Smart, Duality and sufficiency in control problems with invexity, J. Math. Anal. Appl. 136 (1988) 325–333.[3] D. Bhatia, P. Kumar, Multiobjective control problem with generalized invexity, J. Math. Anal. Appl. 189 (1995) 676–692.[4] C. Xiuhong, Duality for a class of multiobjective control problems, J. Math. Anal. Appl. 267 (2002) 377–394.[5] T.R. Gulati, I. Husain, A. Ahmed, Optimailty conditions and duality for multiobjective control problems, J. Appl. Anal. 11 (2005) 225–245.[6] C. Nahak, S. Nanda, On efficiency and duality for multiobjective variational control problems with (F − ρ)-convexity, J. Math. Anal. Appl. 209 (1997)415–434.
[7] C. Nahak, S. Nanda, Sufficient optimality criteria and duality formultiobjective variational control problemswith V -invexity, Nonlinear Anal. 66 (2007)1531–1525.
[8] Z.A. Liang, H.X. Huang, P.M. Pardalos, Optimality conditions and duality for a class of nonlinear fractional programming problems, J. Optim. TheoryAppl. 110 (2001) 611–619.
[9] Z.A. Liang, H.X. Huang, P.M. Pardalos, Efficient conditions and duality for a class of multiobjective programming problems, J. Global. Optim. 27 (2003)1–25.
[10] I. Ahmad, Z. Husain, Optimality conditions and duality in nondifferentiable minimax fractional programming with generalized convexity, J. Optim.Theory Appl. 129 (2006) 255–275.
[11] A. Chinchuluun, D. Yuan, P.M. Pardalos, Optimality conditions and duality for nondifferentiable multiobjective fractional programming withgeneralized convexity, Ann. Oper. Res. 154 (2007) 133–147.
[12] T.R. Gulati, I. Ahmad, D. Agarwal, Sufficiency and duality in multiobjective programming under generalized type I functions, J. Optim. Theory Appl.135 (2007) 411–427.
[13] D. Yuan, A. Chinchuluun, X. Liu, P.M. Pardalos, Optimality conditions and duality for multiobjective programming involving (C, α, ρ, d) type Ifunctions, in: I.V. Konnov, D.T. Luc, A.M. Rubinov (Eds.), Generalized Convexity and Related Topics, Springer, 2007, pp. 73–87.
[14] D. Yuan, A. Chinchuluun, X. Liu, P.M. Pardalos, Generalized convexities and generalized gradient based on algebraic operations, J. Math. Anal. Appl.321 (2006) 675–690.
[15] G.J. Zalmai, Efficiency conditions and duality models for multiobjective fractional subset programming problems with generalized (F , α, ρ, θ)-V-convex functions, Comput. Math. Appl. 43 (2002) 1489–1520.
[16] J.M. Borwein, Optimization with respect to partial orderings, D. Phil., Thesis, Oxford University, 1974.[17] V. Chankong, Y.Y. Haimes, Multiobjective Decision Making: Theory and Methods, North-Holland, New York, 1983.











![The Teaching of [θ] and [ð] Sounds in English - CORE](https://static.fdokumen.com/doc/165x107/6331af3b7f0d9c38da011592/the-teaching-of-and-d-sounds-in-english-core.jpg)








