reducing health care costs: eliminating excess ... - GovInfo

SCIENCE CHINA Technological Sciences
© Science China Press and Springer-Verlag Berlin Heidelberg 2014 tech.scichina.com link.springer.com
*Corresponding author (email: [email protected])
• Article • June 2014 Vol.57 No.6: 1219–1228
doi: 10.1007/s11431-014-5523-3
Spacecraft rendezvous trajectory safety quantitative performance index eliminating probability dilution
SUN ZhenJiang, LUO YaZhong* & NIU ZhiYong
College of Aerospace Science and Engineering, National University of Defense Technology, Changsha 410073, China
Received November 7, 2013; accepted March 20, 2014; published online April 3, 2014
In view of the probability dilution problem of the existing quantitative indexes of rendezvous trajectory safety performance using collision probability, this paper proposes a new quantitative index of rendezvous trajectory safety performance by well combining collision probability with warning threshold. The proposed new index increases monotonously as the position errors of the chaser spacecraft increase, therefore it can effectively overcome the problems of the reduction in the largest performance value and the advancement in the most dangerous time induced by the probability dilution. The proposed new index is applied to the safety design of close range rendezvous missions. The mission’s safety requirements for initial navigation precision and the safe region of initial and final keeping points’ positions with a certain navigation precision are analyzed, and several valua-ble conclusions about the relation between position navigation precision and velocity navigation precision as well as the rela-tion between keeping points’ positions and navigation precision are obtained.
rendezvous and docking, safety performance, probability dilution, missing alarm probability
Citation: Sun Z J, Luo Y Z Niu Z Y. Spacecraft rendezvous trajectory safety quantitative performance index eliminating probability dilution. Sci China Tech Sci, 2014, 57: 12191228, doi: 10.1007/s11431-014-5523-3
1 Introduction
Space rendezvous and docking is a basic technology for kinds of advanced space operations such as spacecraft on-orbit assembly, propellant supply, and rescue in space and so on. Rendezvous and docking is actually a planned collision. Moreover, astronauts usually take parts in the rendezvous and docking mission. Therefore, safety re-quirements are some of the most critical aspects of the defi-nition of an operational profile for a rendezvous mission [1–3]. With rendezvous and docking becoming more au-tonomous and applied in more fields [4,5], trajectory safety performance occupies a more important position. Anoma-lies occurred both in ETS-VII mission of Japan and DART mission of America. An accident was avoided in the former
mission because of a safely designed rendezvous trajectory [6] while a collision happened in the latter mission due to a wrong strategy when anomaly occurred [7].
Studies on safety performance of rendezvous trajectories can be sorted into two kinds. One is to use safety perfor-mance as a constraint while the other one is to use it as a design objective. There are some investigations belonging to the first kind. Zhu et al. [8] gave the approach velocity profiles and the CAM (collision avoidance maneuver) ve-locity increment for the +V-bar approach, where a target- centered cuboid or spheroid was taken as “flight-forbidden zone”. Xie and Chen [9] investigated a design method of safe retreat trajectory for rendezvous behind a keep-out- zone. Ma et al. [10] investigated the optimal-fuel rendez-vous with power-limited propulsion systems, fixed docking direction, and collision avoidance constraint. Some other investigations belong to the second kind. Luo et al. [11] defined the minimum distance between the chaser and the

1220 Sun Z J, et al. Sci China Tech Sci June (2014) Vol.57 No.6
target in the chaser’s free-flying path as the trajectory safety quantitative performance index, and they completed the multi-objective optimization design of an impulsive ren-dezvous that includes the minimum characteristic velocity, minimum flight duration, and maximum safety performance index. Breger and How [12] presented a method for online generation of safe, fuel-optimized rendezvous trajectories, which guarantee collision avoidance for a large class of anomalous system behaviors.
However, the preceding studies on safety performance mainly focus on the nominal trajectory, without considering trajectory uncertainty. In the design of a practical rendez-vous trajectory, the navigation, control, and guidance errors that may arise in all phases of the rendezvous must be taken into account. There are two quantitative elements, which can represent safety performance considering trajectory uncertainty, i.e., ellipsoid distance and collision probability. Ellipsoid distance means the distance between the chaser’s position error ellipsoid and the target’s control zone when they have no intersection. However, ellipsoid distance would have no meaning when the two spacecraft are so close that the ellipsoids intersect. Fortunately, collision probability is able to represent the probability of collision occurrence when the ellipsoids intersect. Woodburn [13] presented a methodology for improving the understanding of position covariance based on 3D visualization. Liang et al. [14] proposed a simplified, yet quicker calculation method for minimum distance index and maximum instan-taneous collision probability index. Furthermore, they testi-fied the rationality, efficiency and accuracy of the two per-formance indexes.
Some studies defined a trajectory safety quantitative performance index including both ellipsoid distance and collision probability, which can be applied in the whole rendezvous process. Luo et al. [15] defined a trajectory safety quantitative performance index, which used ellipsoid distance to quantify the degree of safety under the condition of no intersection between the position error ellipsoid and the control zone, and used collision probability to quantify the degree of danger when they intersected. However, the safety performance of a trajectory does not depend on the index value solely. It practically depends on the relation between the index value and the warning threshold. A warning threshold is always required to give a judgement for whether the trajectory is safe or not. Niu [16] proposed a method to determine warning threshold of collision proba-bility and defined a warning threshold based trajectory safety quantitative performance index. That index can di-rectly give a judgement for whether the trajectory is safe or not.
However, in fact, the probability dilution will exist when collision probability is used. Namely, collision probability will increase at first and then decrease as trajectory uncer-tainty arising. It does not meet the requirement that the tra-jectory should be more dangerous in accordance with larger
trajectory uncertainty. So taking a method to eliminate probability dilution should be considered when defining a safety performance index. Alfano [17] indicated that orbit positions should be sufficiently accurate to avoid probabil-ity dilution. Peterson [18] developed approximate analytic expressions that relate the largest possible probability at conjunction to any time before conjunction and to the near earth object (NEO) state uncertainty at epoch.
The previous studies have limitations in that the existing rendezvous trajectory safety quantitative performance in-dexes [14–16] did not take account of solving problems of probability dilution. Moreover, the indexes were mainly used to analyze trajectory safety performance of rendezvous missions, seldom applied in designing and optimizing safe rendezvous trajectory as well as CAM . Based on the exist-ing studies on safety performance of rendezvous trajectories, a new spacecraft rendezvous trajectory safety quantitative performance index eliminating probability dilution is pro-posed. The proposed performance index is firstly compared with the two existing performance indexes including the collision probability solely based index and the warning threshold based index by analyzing probability dilution’s influences and the corresponding warning zones. The results of analysis of a classic rendezvous trajectory’s safety per-formance by using these three indexes respectively are compared. It indicates that the new proposed index can eliminate probability dilution and represent safety perfor-mance of a rendezvous trajectory accurately. Then the pro-posed trajectory safety quantitative performance index eliminating probability dilution is applied to the design of close range rendezvous missions. The safety requirements for initial navigation precision are analyzed, which indicates that improving velocity navigation precision is more effec-tive than improving position navigation precision in order to guarantee a trajectory’s safety. Moreover, a farther final keeping point or a closer initial keeping point leads to a safer trajectory. At last the safe region of initial and final keeping points’ positions with certain navigation precision is given.
2 Proposed index definition
2.1 Trajectory safety performance elements
The trajectory safety performance including trajectory un-certainty, can be represented by the relation between the position error ellipsoid of the chaser and the control zone of the target during a safety performance analyzing time TA after arbitrary moment 0 0 0 f( ) t t in the rendezvous
process. Figure 1 illustrates the relation between the chaser and the target at moment 0 0 A( ) T . As shown in
Figure 1(a), when there is no intersection between the posi-tion error ellipsoid of the chaser and the control zone of the target, the ellipsoid distance between them, denoted as
Sun Z J, et al. Sci China Tech Sci June (2014) Vol.57 No.6 1221
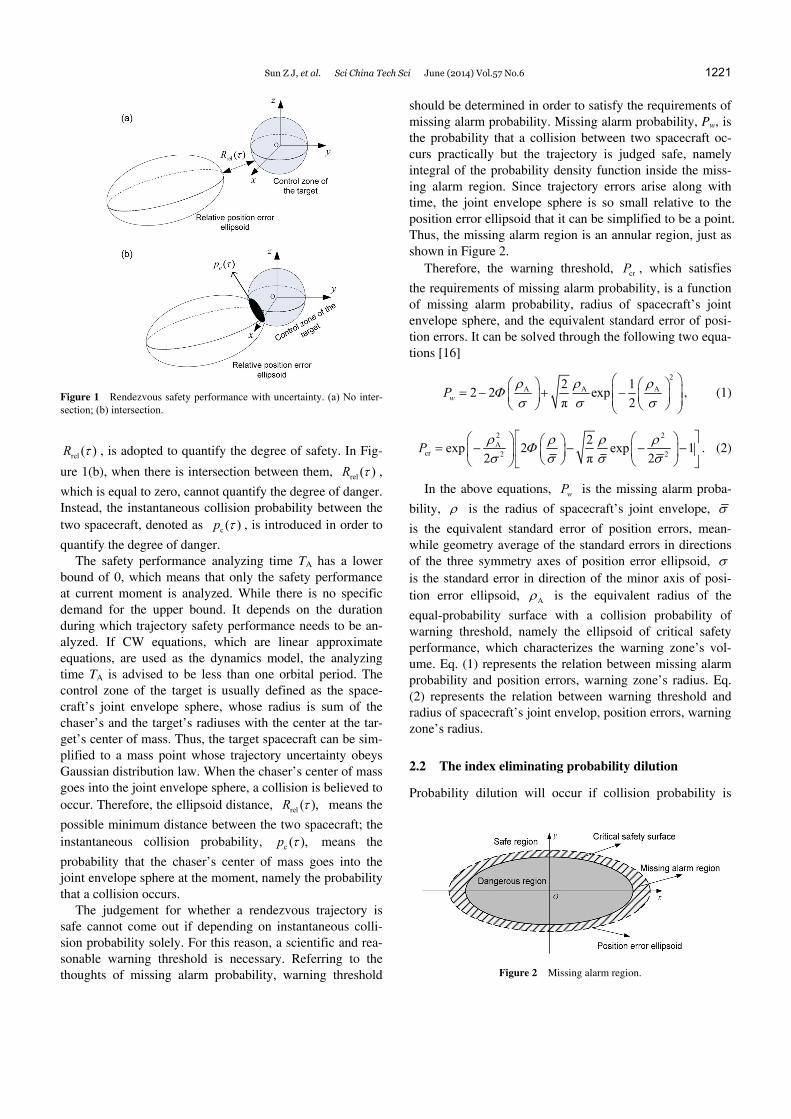
Figure 1 Rendezvous safety performance with uncertainty. (a) No inter-section; (b) intersection.
rel ( )R , is adopted to quantify the degree of safety. In Fig-
ure 1(b), when there is intersection between them, rel ( )R ,
which is equal to zero, cannot quantify the degree of danger. Instead, the instantaneous collision probability between the two spacecraft, denoted as c ( )p , is introduced in order to
quantify the degree of danger. The safety performance analyzing time TA has a lower
bound of 0, which means that only the safety performance at current moment is analyzed. While there is no specific demand for the upper bound. It depends on the duration during which trajectory safety performance needs to be an-alyzed. If CW equations, which are linear approximate equations, are used as the dynamics model, the analyzing time TA is advised to be less than one orbital period. The control zone of the target is usually defined as the space-craft’s joint envelope sphere, whose radius is sum of the chaser’s and the target’s radiuses with the center at the tar-get’s center of mass. Thus, the target spacecraft can be sim-plified to a mass point whose trajectory uncertainty obeys Gaussian distribution law. When the chaser’s center of mass goes into the joint envelope sphere, a collision is believed to occur. Therefore, the ellipsoid distance, rel ( ),R means the
possible minimum distance between the two spacecraft; the instantaneous collision probability, c ( ),p means the
probability that the chaser’s center of mass goes into the joint envelope sphere at the moment, namely the probability that a collision occurs.
The judgement for whether a rendezvous trajectory is safe cannot come out if depending on instantaneous colli-sion probability solely. For this reason, a scientific and rea-sonable warning threshold is necessary. Referring to the thoughts of missing alarm probability, warning threshold
should be determined in order to satisfy the requirements of missing alarm probability. Missing alarm probability, Pw, is the probability that a collision between two spacecraft oc-curs practically but the trajectory is judged safe, namely integral of the probability density function inside the miss-ing alarm region. Since trajectory errors arise along with time, the joint envelope sphere is so small relative to the position error ellipsoid that it can be simplified to be a point. Thus, the missing alarm region is an annular region, just as shown in Figure 2.
Therefore, the warning threshold, crP , which satisfies
the requirements of missing alarm probability, is a function of missing alarm probability, radius of spacecraft’s joint envelope sphere, and the equivalent standard error of posi-tion errors. It can be solved through the following two equa-tions [16]
2
A A A2 12 2 exp
π 2
wP , (1)
2 2A
cr 2 2
2exp 2 exp 1
2 π 2P
. (2)
In the above equations, wP is the missing alarm proba-
bility, is the radius of spacecraft’s joint envelope,
is the equivalent standard error of position errors, mean-while geometry average of the standard errors in directions of the three symmetry axes of position error ellipsoid, is the standard error in direction of the minor axis of posi-tion error ellipsoid, A is the equivalent radius of the
equal-probability surface with a collision probability of warning threshold, namely the ellipsoid of critical safety performance, which characterizes the warning zone’s vol-ume. Eq. (1) represents the relation between missing alarm probability and position errors, warning zone’s radius. Eq. (2) represents the relation between warning threshold and radius of spacecraft’s joint envelop, position errors, warning zone’s radius.
2.2 The index eliminating probability dilution
Probability dilution will occur if collision probability is
Figure 2 Missing alarm region.

1222 Sun Z J, et al. Sci China Tech Sci June (2014) Vol.57 No.6
used to represent a rendezvous trajectory’s safety perfor-mance. The reason for probability dilution is that probabil-ity density in center zone decreases as position errors arise. When the chaser’s position errors arise, the position error ellipsoid expands, the probability density decreases in cen-ter zone while increases in edge zone. Then there exists an equal probability density surface where probability density does not change. In this situation, the probability density on the surface arrives at its highest value. If the target is inside the surface, probability dilution occurs, meanwhile collision probability decreases with position errors arising. What is more, since warning threshold is a function of missing alarm probability, it decreases as position errors arise and the ellipsoid of critical safety performance expands. So col-lision probability and warning threshold will become very small when the chaser’s trajectory uncertainty arises to a high level. It is against judging a trajectory’s safety perfor-mance.
Suppose c is the equivalent radius of an arbitrary
equal probability surface. According to eq. (2), the collision probability on the surface is
2 2c
c 2 2
2exp 2 exp 1
π2 2
P . (3)
The ratio between collision probability and warning threshold is
2 2c A
c cr 2/ exp
2P P
. (4)
According to eq. (1), A / only varies with missing
alarm probability wP . Then the ratio can be expressed as
2
c cr 2/ exp ( )
2c
wP P f P
. (5)
For a certain missing alarm probability Pw, the ratio
c cr/P P only varies with the ratio between equivalent radius
of the equal probability surface c and the standard error in direction of the minor axis of position error ellipsoid . When the standard error of position errors becomes larger, the equal probability surface is relatively closer to the center of position error ellipsoid, and then the ratio is higher. Therefore, influences of probability dilution will be elimi-nated if the ratio is used to represent safety performance of a rendezvous trajectory.
The trajectory safety quantitative performance index eliminating probability dilution during safety performance analyzing time TA from the moment 0 can be defined as
0 0 AA
0 0 A
rel c
safe 0c cr c
max ( ( )), ( ) 0,( )
max ( ) / ( ), ( ) 0.
TT
T
R pI
p P p
(6)
From the definition in eq. (6), we can know that the value range of the index and the corresponding safety perfor-mance are
when c cr( ) ( )p P , safe ( ) 1I , dangerous;
when c cr0 ( ) ( )p P , safe0< ( ) 1I , safe;
when c ( ) 0p , safe rel( ) ( ) 0I R , safe.
Since 0 is an arbitrary moment in period 0 f[ , ]t t dur-
ing the whole rendezvous process, the trajectory safety quantitative performance index of the whole rendezvous process safeI is defined as
A
0 0 fsafe safe 0max ( ( ))T
t tI I
. (7)
Thus the judgement for a trajectory’s safety performance is
safe
safe
1, dangerous,
1, safe.
I
I
(8)
3 Comparison based probability dilution anal-ysis
In addition to the index proposed here, there are two other trajectory safety quantitative performance indexes, includ-ing the collision probability solely based index proposed by Luo et al. [15], and the warning threshold based index pro-posed by Niu [16]. The two indexes respectively employ collision probability solely and collision probability minus warning threshold to represent a trajectory’s safety perfor-mance when there is intersection between the position error ellipsoid of the chaser and the control zone of the target. Namely, definitions of these two indexes are as follows.
The collision probability solely based trajectory safety quantitative performance index [15] is defined as
0 0 AA
0 0 A
rel rel*safe 0
c rel
max ( ( )), ( ) 0,( )
max ( ( )), ( ) 0.
TT
T
R RI
p R
(9)
The warning threshold based trajectory safety quantita-tive performance index [16] is defined as
0 0 AA
0 0 A
rel rel**
safe 0c cr rel
max ( ( )), ( ) 0,( )
max ( ( ) ( )), ( ) 0.
TT
T
R RI
p P R
(10)
Probability dilution’s influences on these three indexes will be analyzed and the indexes will be compared accord-ing to the subjectivity-testing criterion.
According to the conservatism principle in engineering, a subjectivity-testing criterion is formulated here: the larger the trajectory uncertainty is, the more conservative the judgement for the trajectory’s safety performance should be.

Sun Z J, et al. Sci China Tech Sci June (2014) Vol.57 No.6 1223
In other words, the larger the standard error of position er-rors is, the more dangerous the safety performance should be, and the larger the warning zone should be. Otherwise, the safety performance is safer or the warning zone is smaller with larger trajectory uncertainty, it means that the safety performance index has subjectivity and the warning zone may be reduced artificially, namely the index does not meet the subjectivity-testing criterion.
Warning zone is the zone inside the equal probability surface that has a collision probability of warning threshold. The warning zone’s volume can be characterized by the equivalent radius of the equal probability surface A ,
whose calculation method is
2
A 2
1 22ln 2 exp 1
π 2P
, (11)
where P is the collision probability on the equal probability surface, namely warning threshold.
Since the three indexes use the same ellipsoid distance
rel ( )R to quantify the degree of safety under the condition
of no intersection between the position error ellipsoid and the control zone, collision probability and warning threshold will be mainly analyzed when these three indexes are com-pared.
Assume that the initial position errors of the chaser obey three-dimensional Gaussian distribution law, the distance between the chaser and the target is a certain 500 m, radius of the spacecraft’s joint envelope sphere is 25 m, and
missing alarm probability is set as 0.01. The three indexes’ variations along with the position standard error are shown in Figure 3.
Instantaneous collision probability increases at first and then decreases because of probability dilution. If the warn-ing threshold is set as 1.0×10−5, the safety performance judged by the collision probability solely based index changes from safety to danger and then back to safety again.
Figure 3 Indexes’ variations along with position standard error.
Obviously, the collision probability solely based index does not meet the subjectivity-testing criterion.
Warning threshold decreases monotonously. The warning threshold based index changes from negative to positive, in-creases at first, decreases then, and approaches to zero at last. It means that this index may decrease as the trajectory uncertainty arises due to probability dilution. Therefore, the warning threshold based index also does not meet the sub-jectivity-testing criterion.
The index eliminating probability dilution increases mo-notonously. That is to say, the safety performance judged by this index becomes more dangerous as position errors be-come larger. Thus, this index eliminates influences of probability dilution, and it meets the subjectivity-testing criterion.
Figure 4 shows a partially enlarged detail at the critical safety performance point. It illustrates that the warning zone of the index eliminating probability dilution is the same as the warning zone of the warning threshold based index. The two indexes’ critical safety performance ellipsoids are the equal probability surface with a collision probability of warning threshold.
The warning radiuses’ variations of the three indexes along with the position standard error are shown in Figure 5, where the warning threshold of the collision probability solely based index is set as 1.0×10−5.
Warning threshold of the collision probability solely based index is a constant value. Warning radius of the index increases at first and decreases then. Once the position standard error becomes larger than some value, the warning radius becomes zero, and there will be no alarm no matter where the chaser is. Obviously, it does not meet the subjec-tivity-testing criterion.
Since the warning threshold of the warning threshold based index and the warning threshold of the index elimi-nating probability dilution are the same, their warning zones are the same.
The warning radius of the warning threshold based index
Figure 4 Partially enlarged detail of indexes’ variations.

1224 Sun Z J, et al. Sci China Tech Sci June (2014) Vol.57 No.6
Figure 5 Warning radiuses’ variations along with position standard error.
and the index eliminating probability dilution increases lin-early as position standard error increases. Let missing alarm probability be Pw = 0.01, then the warning radius is A = 3.368.
According to the analysis above, the three indexes can be evaluated as follows.
(1) For the collision probability solely based index, a certain warning threshold has to be set artificially in order to use this index to judge a trajectory’s safety performance. However, the warning threshold set artificially has no scien-tific basis, and the judgement may be interfered artificially. Besides, this index does not meet the subjectivity-testing criterion.
(2) For the warning threshold based index, though the warning zone extends as trajectory uncertainty arises, this index still cannot eliminate probability dilution. The index value may decrease as trajectory uncertainty arises. It does not meet the subjectivity-testing criterion either.
(3) For the index eliminating probability dilution, this index not only can judge a trajectory’s safety performance correctly, but also can eliminate probability dilution. The index value increases monotonously as trajectory uncer-tainty arises. It meets the subjectivity-testing criterion. Therefore, this index can represent a trajectory’s safety performance quantitatively and correctly.
4 Safety performance of a classic rendezvous trajectory
A classic rendezvous trajectory’s safety performance is an-alyzed by using the three indexes respectively. The analysis results are compared and the three indexes’ accuracy is evaluated when representing trajectory safety performance.
The relative state is given in LVLH coordinate system, whose origin is at the target’s mass center, OX axis is on the earth radial direction, OY axis is on the co-velocity direction and OZ axis is on the orbit normal direction.
Assume the target is on a circular orbit with a height of 400 km. Radius of the spacecraft joint envelope sphere is
25 m . Missing alarm probability is set as 0.01wP .
The safety performance analyzing time is set as TA = 4000 s. The initial relative state of the chaser is (0, 3000 m, 0, 0.7 m/s, 0, 0)T. Four different initial covariance matrices of the chaser are listed in Table 1.
Figure 6 shows the relative trajectory between the two spacecraft. The chaser drifts from 3000 m right behind the target to about 500 m right behind the target, and then drifts far from the target.
Figure 7 shows the variations of the ellipsoid distance in
Table 1 Four different initial covariance configurations
Case Initial navigation covariance (m2, m2/s2)
1 0 diag(4 4 4 0.0004 0.0004 0.0004)C
2 0 diag(16 16 16 0.0016 0.0016 0.0016)C
3 0 diag(49 49 49 0.0049 0.0049 0.0049)C
4 0 diag(100 100 100 0.01 0.01 0.01)C
Figure 6 Spacecraft relative trajectory.
Figure 7 Variations of ellipsoid distance.

Sun Z J, et al. Sci China Tech Sci June (2014) Vol.57 No.6 1225
the four cases respectively. When the two spacecraft drift closer, the ellipsoid distance decreases and then becomes zero. Thus, collision probability is needed to quantify the degree of danger. When the two spacecraft drift farther, collision probability decreases and becomes zero, then the ellipsoid distance increases. In different cases, the larger the trajectory uncertainty is, the closer the ellipsoid distance is. The trajectory uncertainty is the largest in case 4, and the ellipsoid distance becomes zero at first. While the trajectory uncertainty is the least in case 1, the ellipsoid distance be-comes zero at last, then increases at first as the spacecraft drift farther.
Figures 8 and 9 show the variations of the instantaneous collision probability and warning threshold during safety performance analyzing time in the four cases respectively. Since initial navigation errors arise, the instantaneous colli-sion probability in case 2 is higher than in case 1. However, due to probability dilution, the maximum instantaneous col-lision probability decreases in cases 3 and 4. Clearly, no judgement for the trajectory’s safety performance is achieved if depending on collision probability solely. Figure
Figure 8 Variations of instantaneous collision probability.
Figure 9 Variations of warning threshold.
9 illustrates that warning threshold decreases as trajectory uncertainty arises, namely the trajectory is more likely to be judged dangerous.
Figures 10 and 11 show the variations of the warning threshold based index and the index eliminating probability dilution.
The three indexes are all judged dangerous in the four cases. The collision probability solely based index in Figure 8 and the warning threshold based index in Figure 10 cannot eliminate probability dilution. Their maximum index values even decrease as trajectory uncertainty arises in cases 3 and 4. While the proposed index in Figure 11 can eliminate probability dilution, and the maximum index value increas-es as trajectory uncertainty arises, namely the trajectory is judged more dangerous.
In the four cases, the nominal trajectories are the same, the initial navigation errors’ distribution laws are the same, and only the errors’ values are different, so the most danger-ous moment should be the same. But if probability dilution occurs at the most dangerous moment, the instantaneous collision probability may be even lower than the probability
Figure 10 Variations of the warning threshold based index.
Figure 11 Variations of the index eliminating probability dilution.
1
2
3
4
1226 Sun Z J, et al. Sci China Tech Sci June (2014) Vol.57 No.6
at last moment, and the most dangerous moment of the warning threshold based index will occur in advance. Therefore, in Figures 8 and 10, the most dangerous mo-ments of the collision probability solely based index and the warning threshold based index go ahead in turn among the four cases. However, in Figure 11, the most dangerous mo-ments are the same among the four cases since the proposed index can eliminate probability dilution.
In a word, the collision probability solely based index and the warning threshold based index cannot eliminate probability dilution. Their highest values may decrease and their most dangerous moments may go ahead. Therefore, these two indexes cannot represent a trajectory’s safety performance correctly. While the index eliminating proba-bility dilution overcomes the above problems effectively and can represent a trajectory’s safety performance correctly.
5 Application to rendezvous mission design
The safety quantitative performance index eliminating probability dilution is applied to safety design of close range rendezvous missions. A mission’s safety requirements for initial navigation precision and the safe regions of initial and final keeping points’ positions with a certain navigation precision are analyzed.
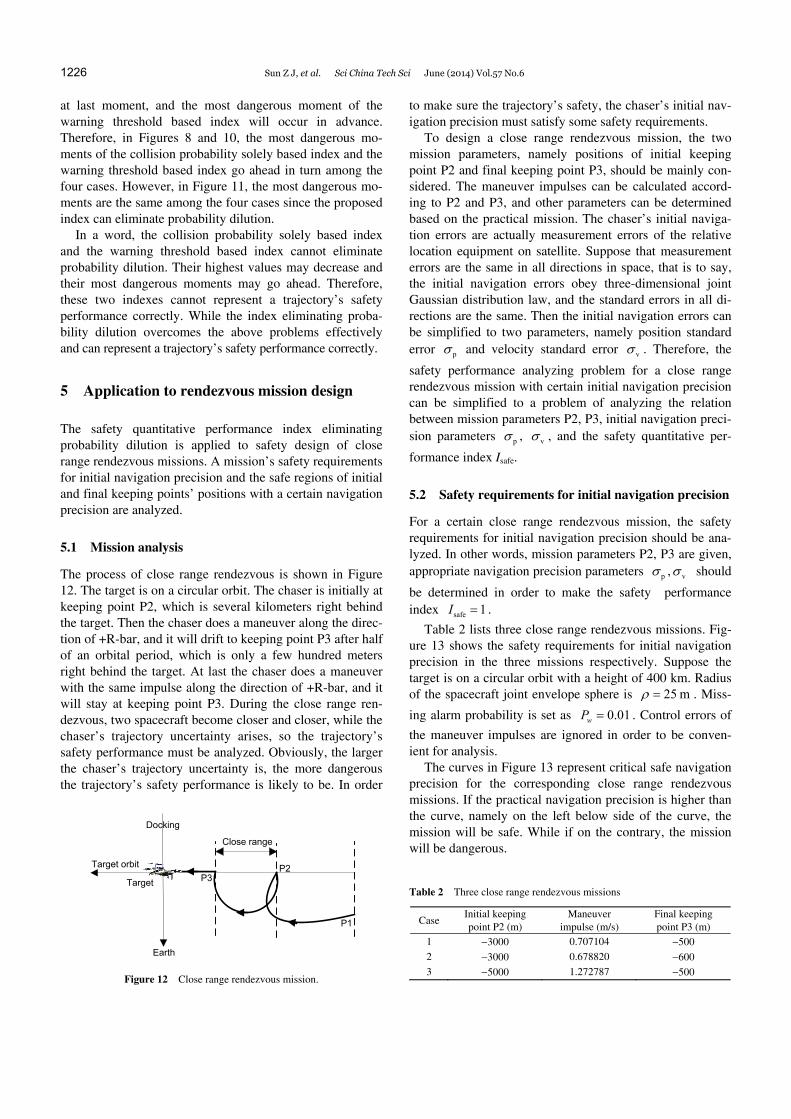
5.1 Mission analysis
The process of close range rendezvous is shown in Figure 12. The target is on a circular orbit. The chaser is initially at keeping point P2, which is several kilometers right behind the target. Then the chaser does a maneuver along the direc-tion of +R-bar, and it will drift to keeping point P3 after half of an orbital period, which is only a few hundred meters right behind the target. At last the chaser does a maneuver with the same impulse along the direction of +R-bar, and it will stay at keeping point P3. During the close range ren-dezvous, two spacecraft become closer and closer, while the chaser’s trajectory uncertainty arises, so the trajectory’s safety performance must be analyzed. Obviously, the larger the chaser’s trajectory uncertainty is, the more dangerous the trajectory’s safety performance is likely to be. In order
Earth
P1
P2P3
Target orbit
Target
Docking
Close range
Figure 12 Close range rendezvous mission.
to make sure the trajectory’s safety, the chaser’s initial nav-igation precision must satisfy some safety requirements.
To design a close range rendezvous mission, the two mission parameters, namely positions of initial keeping point P2 and final keeping point P3, should be mainly con-sidered. The maneuver impulses can be calculated accord-ing to P2 and P3, and other parameters can be determined based on the practical mission. The chaser’s initial naviga-tion errors are actually measurement errors of the relative location equipment on satellite. Suppose that measurement errors are the same in all directions in space, that is to say, the initial navigation errors obey three-dimensional joint Gaussian distribution law, and the standard errors in all di-rections are the same. Then the initial navigation errors can be simplified to two parameters, namely position standard error p and velocity standard error v . Therefore, the
safety performance analyzing problem for a close range rendezvous mission with certain initial navigation precision can be simplified to a problem of analyzing the relation between mission parameters P2, P3, initial navigation preci-sion parameters p , v , and the safety quantitative per-
formance index Isafe.
5.2 Safety requirements for initial navigation precision
For a certain close range rendezvous mission, the safety requirements for initial navigation precision should be ana-lyzed. In other words, mission parameters P2, P3 are given, appropriate navigation precision parameters p , v should
be determined in order to make the safety performance index safe 1I .
Table 2 lists three close range rendezvous missions. Fig-ure 13 shows the safety requirements for initial navigation precision in the three missions respectively. Suppose the target is on a circular orbit with a height of 400 km. Radius of the spacecraft joint envelope sphere is 25 m . Miss-
ing alarm probability is set as 0.01wP . Control errors of
the maneuver impulses are ignored in order to be conven-ient for analysis.
The curves in Figure 13 represent critical safe navigation precision for the corresponding close range rendezvous missions. If the practical navigation precision is higher than the curve, namely on the left below side of the curve, the mission will be safe. While if on the contrary, the mission will be dangerous.
Table 2 Three close range rendezvous missions
Case Initial keeping point P2 (m)
Maneuver impulse (m/s)
Final keeping point P3 (m)
1 3000 0.707104 500
2 3000 0.678820 600 3 5000 1.272787 500

Sun Z J, et al. Sci China Tech Sci June (2014) Vol.57 No.6 1227 In
itial
ve
loci
ty s
tand
ard
err
or (
m/s
)
Figure 13 Safety requirements for initial navigation precision.
When the velocity standard error is relatively large, the position standard error has to approach zero in order to make sure the mission’s safety. When the velocity standard error is relatively small, it is still safe even the position standard error increases by tens of meters as velocity stand-ard error decreases by 0.01 m/s. Hence, it is more effective to improve velocity navigation precision rather than im-prove position navigation precision.
Comparing case 2 with case 1, the position of final keeping point P3 changes from 500 m to 600 m, and for the safety requirements the initial navigation precision reduces obviously. The velocity navigation precision can decrease by about 0.01 m/s under the same other conditions.
Comparing case 3 with case 1, the position of initial keeping point P2 changes from 3000 m to 5000 m, but for the safety requirements the initial navigation precision re-duces little. The velocity navigation precision only decreas-es by less than 0.001 m/s under the same other conditions.
5.3 Safe regions of keeping points’ positions
In design of a close range rendezvous mission, initial navi-gation precision is usually certain considering the limits of the relative location equipment on satellite, then the mission should be designed with a safe relative trajectory. In other words, navigation precision parameters p , v are cer-
tain, mission parameters P2, P3 should be determined in order to make safety performance index safe 1I .
The coordinate plane that consists of mission parameters P2 and P3 represents every close range rendezvous mission. One point on the plane represents a close range rendezvous mission, and the corresponding safety requirements for navigation precision should be calculated. Connect all the points that have the same safety requirements, then the safe regions of initial and final keeping points’ positions with a certain navigation precision would be acquired.
As shown in Figure 14, the horizontal coordinate plane represents the plane that consists of mission parameters P2 and P3, the vertical coordinate axis represents velocity standard error. The surfaces represent the safety require-ments for initial navigation precision of the corresponding close range rendezvous missions on the horizontal plane. Different surfaces have different position standard errors. Lines on the surfaces have the same velocity standard error, so they are equal navigation precision lines.
(1) The region with lower safety requirements than the equal navigation precision line on the surface is safe region of close range rendezvous missions with the certain naviga-tion precision.
(2) Along the initial keeping point position axis, position of the initial keeping point P2 changes from 2000 m to 10000 m, but for the safety requirement the velocity naviga-tion precision increases by only less than 0.001 m/s.
Figure 14 Safety requirements on mission parameter plane.

1228 Sun Z J, et al. Sci China Tech Sci June (2014) Vol.57 No.6
(3) Along the final keeping point position axis, position of the final keeping point P3 changes from 500 m to 600 m, and the velocity navigation precision decreases by about 0.01 m/s.
(4) Along the velocity navigation precision axis, position navigation precision decreases, while velocity navigation precision increases.
6 Conclusions
This paper proposes the rendezvous trajectory safety quan-titative performance index eliminating probability dilution, compares this index with the collision probability solely based index and the warning threshold based index, and reaches the following conclusions.
(1) The rendezvous trajectory safety quantitative perfor-mance index eliminating probability dilution, which elimi-nates the influences of probability dilution and increases monotonously as trajectory uncertainty arises, can represent a trajectory’s safety performance more correctly than the existing indexes.
(2) Due to probability dilution, the maximum index val-ues of the collision probability solely based index and the warning threshold based index are reduced artificially, while the most dangerous moments of the two indexes are advanced artificially. Thus, the index eliminating probabil-ity dilution proposed here can overcome the above problems effectively.
The safety quantitative performance index eliminating probability dilution is applied to safety design of close range rendezvous missions. A mission’s safety requirements for initial navigation precision and the safe regions of initial and final keeping points’ positions with a certain navigation precision are analyzed. Following conclusions are reached.
(1) The safety performance analyzing problem for a close range rendezvous mission with certain initial navigation precision can be simplified to a problem of analyzing the relation between mission parameters, initial navigation pre-cision parameters, and the safety quantitative performance index.
(2) It is more effective to improve velocity navigation precision rather than improve position navigation precision.
(3) If the initial keeping point’s position becomes farther from the target, for the safety requirements the initial navi-gation precision increases little. The initial keeping point’s position changes from 2000 m to 10000 m, but the velocity navigation precision increases by only less than 0.001 m/s.
(4) If the final keeping point’s position becomes closer to the target, for the safety requirements the initial navigation precision increases obviously. The final keeping point’s position changes from 500 m to 600 m, and the velocity navigation precision decreases by about 0.01 m/s.
This work was supported by the National Natural Science Foundation of China (Grant No. 11222215), the National Basic Research Program of China (“973” Program) (Grant No. 2013CB733100), and Hunan Provin-cial Natural Science Foundation of China (Grant No. 13JJ1001).
1 Fehse W. Automated Rendezvous and Docking of Spacecraft. Lon-don: Cambridge University Press, 2003. 76–111
2 Tang G J, Luo Y Z, Zhang J. Mission Plan of Rendezvous and Docking (in Chinese). Beijing: Science Press, 2008. 232–249
3 Luo Y Z, Zhang J, Tang G J. Survey of orbital dynamics and control of space rendezvous. Chin J Aeronaut, 2014, 27:1–11
4 Li H N, Gao Z Z, Li J S, et al. Mathematical prototypes for collocat- ing geostationary satellites. Sci China Tech Sci, 2013, 56: 1086–1092
5 Wu W R, Liu W W, Qiao D, et al. Investigation on the development of deep space exploration. Sci China Tech Sci, 2012, 55: 1086–1091
6 Kawano I, Mokuno M, Kasai T, et al. Result of autonomous rendez-vous docking experiment of engineering test satellite-VII. J Spacecr Rockets, 2001, 38: 105–111
7 Croomes S. Overview of the DART Mishap Investigation Results. NASA Report, 2006
8 Zhu R Z, Tang Y, Yin Y. Safety mode design of final translation tra-jectories of space rendezvous (in Chinese). J Astronaut, 2004, 25: 443–448
9 Xie Y C, Chen C Q. Safe retreat trajectory design for rendezvous be-hind a keep-out zone (in Chinese). Aerosp Control Appl, 2009, 35: 1–5
10 Ma L, Meng X, Liu Z, et al. Suboptimal power-limited rendezvous with fixed docking direction and collision avoidance. J Guid Control Dynam, 2013, 36: 229–239
11 Luo Y Z, Tang G J, Lei Y J. Optimal multi-objective linearized ren-dezvous. J Guid Control Dynam, 2007, 30: 383–389
12 Breger L, How J P. Safe trajectories for autonomous rendezvous of spacecraft. J Guid Control Dynam, 2008, 31: 1478–1489
13 Woodburn J, Tanygin S. Position covariance visualization. In: AIAA/AAS Astrodynamics Specialist Conference and Exhibit. Mon-terey, California: AIAA 2002-4985, 2002
14 Liang L B, Luo Y Z, Wang H, et al. Study on the quantitative per-formance index of space rendezvous trajectory safety (in Chinese). J Astronaut, 2010, 31: 2239–2244
15 Luo Y Z, Liang L B, Wang H, et al. Quantitative performance for spacecraft rendezvous trajectory safety. J Guid Control Dynam, 2011, 34: 1264–1269
16 Niu Z Y. Safety Assessment Method and Design Optimization of Rendezvous Trajectory in View of Early Warning Threshold (in Chinese). Dissertation for Master’s Degree. Changsha: National University of Defense Technology, 2012. 27–39
17 Alfano S. Relating position uncertainty to maximum conjunction probability. In: AAS/AIAA Astrodynamics Specialists Conference. Big Sky, Montana: AAS 03-548, 2003
18 Peterson G E. NEO orbit uncertainties and their effect on risk as-sessment. In: 2004 Planetary Defense Conference: Protecting Earth from Asteroids. Orange County, California: AIAA 2004-1420, 2004
Copyright © 2022 FDOKUMEN