Solving Cournot equilibriums with variational inequalities algorithms
13
Published in IET Generation, Transmission & Distribution Received on 14th July 2008 Revised on 25th March 2009 doi: 10.1049/iet-gtd.2008.0344 Special Issue – selected papers on Electricity Markets: Analysis & Operations ISSN 1751-8687 Solving Cournot equilibriums with variational inequalities algorithms F.A. Campos J. Villar J. Barquı ´ n Instituto de Investigacio ´n Tecnolo ´gica, Escuela Te ´cnica Superior de Ingenierı ´a (ICAI), Universidad Pontificia Comillas-, c/Alberto Aguilera 23, Madrid 28015, Spain E-mail: [email protected] Abstract: Over the past two decades, the fact that many games have been formulated as variational inequalities problems has led to relevant developments related with the existence and uniqueness of equilibriums, and with their calculation methodologies. Based on this approach, this study applies sufficient conditions for Cournot equilibriums existence and uniqueness, proving that while existence holds, uniqueness cannot be proved in general. To find one of the existent equilibriums, this study also proposes a novel variational inequalities algorithm which is globally convergent and easy to implement. It iteratively computes searching directions of the equilibrium by generating hyper-planes that separate the equilibrium from the intermediate solutions obtained relaxing the original Cournot game. Unlike other related algorithms, the proposed algorithm does not require Jacobian matrixes evaluation, and the iterative relaxed games can easily be solved using convex and quadratic optimisation models. Numerical results show the operation and convergence of the algorithm. 1 Introduction It is well-recognised that Cournot models, or competition models by quantities, have been a very useful and relevant tool for modelling the behaviour of several non-cooperative producers (sellers, agents or players) selling the same commodity to a set of consumers (or demand, see [1–4]). Indeed, in the literature Cournot theory has been successfully applied in many fields, such as the banking sector (see [5, 6] for an empirical application to European banking markets), the petroleum industry (see for instance [7]), the politic sciences (see [8]) and the electricity sector, which can be considered as one of the main application fields because of the large number of publications (see [9] for a review of the literature) (this is the reason by which many references of this paper are related with electricity markets). One of the main advantages of Cournot models, as opposed to other competition models, are their comprehension and calculation simplicity, being adequate for solving large-scale competitive systems (see [10]). The most commonly used resolution techniques to compute Cournot equilibriums are basically based on the formulation of equivalent optimisation models (see for instance [11, 12]), non-linear complementary problems (see [13 – 15]) and variational inequalities (VI) problems (see [16]). Optimisation models are very efficient resolution tools for equilibriums computing, but, in many cases, their equivalences to Cournot games are not feasible, as for example when demand curves are non-linear. The equivalencies with respect to complementary and VI problems are not so difficult to attain, and their resolution algorithms, which consist in solving iteratively simpler Cournot games (sub-games for short), do not typically require the assumption of linearity of demand curves (see [9]). Nevertheless, global convergence remains a rare property for most of these algorithms, being necessary, in many cases, that the equilibrium models are monotone. Some globally convergent algorithms in presence of monotony are described in [17, 18] for the case of using the classical projection method, also proposed in this paper to solve monotone Cournot equilibriums. In [19], a number of algorithms based on the projection-splitting method (see [20]) are also proposed for the monotone case. The projection-splitting method of Ames follows the ideas of the well-known extragradient method, which consist in a double projection and a technique of solutions updating (see also [21, 22]). This last technique is in fact used in this paper for increasing efficiency of the proposed algorithm. Nevertheless, monotony condition is not always 268 IET Gener. Transm. Distrib., 2010, Vol. 4, Iss. 2, pp. 268–280 & The Institution of Engineering and Technology 2010 doi: 10.1049/iet-gtd.2008.0344 www.ietdl.org
Transcript of Solving Cournot equilibriums with variational inequalities algorithms

26
&
www.ietdl.org
Published in IET Generation, Transmission & DistributionReceived on 14th July 2008Revised on 25th March 2009doi: 10.1049/iet-gtd.2008.0344
Special Issue – selected papers on Electricity Markets:Analysis & Operations
ISSN 1751-8687
Solving Cournot equilibriums with variationalinequalities algorithmsF.A. Campos J. Villar J. BarquınInstituto de Investigacion Tecnologica, Escuela Tecnica Superior de Ingenierıa (ICAI), Universidad Pontificia Comillas-,c/Alberto Aguilera 23, Madrid 28015, SpainE-mail: [email protected]
Abstract: Over the past two decades, the fact that many games have been formulated as variational inequalitiesproblems has led to relevant developments related with the existence and uniqueness of equilibriums, and withtheir calculation methodologies. Based on this approach, this study applies sufficient conditions for Cournotequilibriums existence and uniqueness, proving that while existence holds, uniqueness cannot be proved ingeneral. To find one of the existent equilibriums, this study also proposes a novel variational inequalitiesalgorithm which is globally convergent and easy to implement. It iteratively computes searching directions ofthe equilibrium by generating hyper-planes that separate the equilibrium from the intermediate solutionsobtained relaxing the original Cournot game. Unlike other related algorithms, the proposed algorithm doesnot require Jacobian matrixes evaluation, and the iterative relaxed games can easily be solved using convexand quadratic optimisation models. Numerical results show the operation and convergence of the algorithm.
1 IntroductionIt is well-recognised that Cournot models, or competitionmodels by quantities, have been a very useful and relevant toolfor modelling the behaviour of several non-cooperativeproducers (sellers, agents or players) selling the samecommodity to a set of consumers (or demand, see [1–4]).Indeed, in the literature Cournot theory has been successfullyapplied in many fields, such as the banking sector (see [5, 6]for an empirical application to European banking markets),the petroleum industry (see for instance [7]), the politicsciences (see [8]) and the electricity sector, which can beconsidered as one of the main application fields because ofthe large number of publications (see [9] for a review of theliterature) (this is the reason by which many references of thispaper are related with electricity markets).
One of the main advantages of Cournot models, as opposed toother competition models, are their comprehension andcalculation simplicity, being adequate for solving large-scalecompetitive systems (see [10]). The most commonly usedresolution techniques to compute Cournot equilibriums arebasically based on the formulation of equivalent optimisationmodels (see for instance [11, 12]), non-linear complementary
8The Institution of Engineering and Technology 2010
problems (see [13–15]) and variational inequalities (VI)problems (see [16]). Optimisation models are very efficientresolution tools for equilibriums computing, but, in manycases, their equivalences to Cournot games are not feasible, asfor example when demand curves are non-linear. Theequivalencies with respect to complementary and VI problemsare not so difficult to attain, and their resolution algorithms,which consist in solving iteratively simpler Cournot games(sub-games for short), do not typically require the assumptionof linearity of demand curves (see [9]). Nevertheless, globalconvergence remains a rare property for most of thesealgorithms, being necessary, in many cases, that theequilibrium models are monotone. Some globally convergentalgorithms in presence of monotony are described in [17, 18]for the case of using the classical projection method, alsoproposed in this paper to solve monotone Cournotequilibriums. In [19], a number of algorithms based on theprojection-splitting method (see [20]) are also proposed for themonotone case. The projection-splitting method of Amesfollows the ideas of the well-known extragradient method,which consist in a double projection and a technique ofsolutions updating (see also [21, 22]). This last technique is infact used in this paper for increasing efficiency of the proposedalgorithm. Nevertheless, monotony condition is not always
IET Gener. Transm. Distrib., 2010, Vol. 4, Iss. 2, pp. 268–280doi: 10.1049/iet-gtd.2008.0344

IEdo
www.ietdl.org
satisfied in many realistic equilibriums since implicitly impliesglobal monotony in producers’ profits derivatives. To overcomethis limitation, some approaches have been developed in theliterature. For example, the algorithm analysed in [23], basedon the mentioned extragradient method, converges forpseudo-monotone and continuous models. In [24], otheralternative extragradient algorithms are proposed, but onlyrequire continuity for converging. In addition, there existothers VI algorithms based on the Newton method that areglobally convergent for the non-monotone case (the semi-smooth Newton methods, see for example [25], or thesmoothing Newton methods, see for example [26]). However,these methods typically need to evaluate Jacobian matrixes,that is, second-order derivatives. To decrease their executiontimes, heuristics procedures are sometimes used for thederivatives approximation, compromising in some cases theglobal convergence. To ensure at least local convergence usingthese approximations, appropriate initial solutions arecomputed, for instance applying the so-called equilibriumconstraints models (see [27, 28]).
Based on the results shown in [18], this paper proposes anovel VI algorithm for Cournot equilibriums computationthat preserves many of the above-mentioned properties, andthat can be efficiently applied to realistic equilibriums, asthe one proposed in [29] (which can be considered apreliminary work of the one shown in this paper). Inparticular, global convergence is ensured for concavedemand curves (but monotone equilibrium models areadvisable to increase efficiency). Each Cournot sub-game issolved using a novel quadratic and convex optimisationmodel, whose dual information is used for the profitsderivatives evaluation. Jacobian matrices evaluations are notrequired. In addition, uniqueness and existence conditionsof Cournot equilibrium (see [30–33] for a review of therelated literature) are analysed by applying basic results ofVI and Brower’s fixed-point theories, leading to similarconclusions as in [33]. Nevertheless, while [33] requires thefinding of some special compact sets in the feasible regionfor equilibrium existence (see for more details Lemma 2 of[33]), in this paper only twice differentiable productioncosts and demand curves must be ensured.
This paper is structured as follows. Section 2 provides somegeneral background to the Cournot equilibrium model andformulates its equilibrium constraints. An overview of theproposed VI algorithm and the equilibrium uniqueness andexistence are analysed in Section 3. Section 4 details theproposed algorithm for monotone equilibrium models whilethe general case is treated in Section 5. Finally, the paperpresents some numerical results and concluding remarks.
2 Non-cooperative CournotgamesIn this section, the non-cooperative Cournot theory and thecorresponding equilibrium constraints are briefly reviewed.
T Gener. Transm. Distrib., 2010, Vol. 4, Iss. 2, pp. 268–280i: 10.1049/iet-gtd.2008.0344
For simplicity’s sake, only two companies are firstlyconsidered. Let ci(qi), qi and pi denote the productioncosts, the production quantities offered and the companiesprofits, respectively (i ¼ 1, 2). Let p(q) denote the demandcurve, which is a decreasing monotone function of theaggregated total production q ¼ q1þ q2. Then pi iscalculated by subtracting agent costs ci(qi) from the incomesobtained at marginal price p ¼ p(q), leading to thefollowing formulation
pi(q1, q2) ¼ p q1 þ q2
� �qi � ci(qi) (1)
Therefore pi is not only a function of qi but also of the totalproduction q1þ q2.
In this framework, non-cooperative Cournot theoryprovides a modelling approach to find the producers’behaviour, by maximising their profits pi independentlyand simultaneously when offers are the quantities qi. Infact, this defines the well-known Cournot equilibrium thatconsists of a set of productions q�i, one for each producer i,such that q�i maximises the profit pi maintaining fixed theoptimal productions of the rest of the producers. Thus, thefollowing inequalities must hold true
p1(q�1 , q�2) � p1(q1, q�2) 8q1
p2(q�1 , q�2) � p2(q�1 , q2) 8q2
� �(2)
If the profit functions are derivable, the equilibrium (q�1, q�2) isthen computed by differentiating the profits pi with respectto the productions qi and zeroing. This leads to thefollowing equations system where the marginal costs,denoted as cmi ¼ @ci/@qi, are equal to marginal incomes
p q1 þ q2
� �¼ u q1 þ q2
� �qi þ cmi qi
� �i ¼ 1, 2 (3)
Note that since @qi/@(q1þ q2) ¼ 1, the derivative @p(q1þ q2)/@qi coincides with the demand slope @p(q1þ q2)/@(q1þ q2),denoted by 2u, which is a function of q1þ q2 (see [29, 34]when solving conjectural variations equilibriums. (Whensolving conjectural variations equilibriums, the derivative ofthe demand curve p() with respect to the production qi iscalled conjectural variation parameter, and in general it doesnot coincide with the demand slope 2u. Indeed, thisderivative is the residual demand curve slope of agent i,which measures his capacity to modify the market price pwith respect to his production qi. It then implicitlyrepresents the reaction of each agent production qi withrespect to the total q2i supplied by the rest of thecompetitors (therefore, in this case @qi/@q2i = 0 and thus@qi/@(q1þ q2) = 1)).
Apart from the above conditions which must be satisfiedby (q�1, q�2), in order to ensure that (q�1, q�2) maximises pi, pi
second derivatives must be negative. This is true whentwice differentiable concave demand curve and twice
269
& The Institution of Engineering and Technology 2010

27
&
www.ietdl.org
differentiable convex costs functions are considered, since inthis case
@2pi(q1, q2)
@q2i
¼�2u q1þ q2
� ��@u q1þ q2
� �@qi
qi �@cmi(qi)
@qi
, 0
(4)
When constraints over the productions set are needed, as forexample maximum productions qmaxi, Karush–Kuhn–Tucker (KKT) theory (see [35]) can be applied. Inparticular, if for each agent i, mi is the number of equalityconstraints h i
j ¼ 0, and ni is the number of inequalityconstraints gi
l� 0, the first-order KKT optimality
conditions are
p 1Tq� �
¼ u 1Tq� �
qi þ cmi(qi)
þP
j¼1,mi
hj
i
@hj
i (qi)
@qi
þP
l¼1,ni
kli
@gli (qi)
@qi
hji(qi) ¼ 0 j ¼ 1, mi
gli (qi) � 0
kli g
li (qi) ¼ 0
kli � 0
8><>:
9>=>; l ¼ 1, ni
8>>>>>>>>>>>>><>>>>>>>>>>>>>:
9>>>>>>>>>>>>>=>>>>>>>>>>>>>;
, i ¼ 1, I
(5)
where hij and ki
l are the Lagrange multipliers associated toconstraints hi
j ¼ 0 and gil� 0, respectively; I is the number
of producers; qT and 1 T are the I-dimensional vectors(q1, . . . , qI) and (1, . . . , I ), respectively; and operator T isthe transposition operator for vectors and matrixes. Notethat if I . 2 and if no constraints are considered, system(5) leads to (3), and models an oligopolistic instead of aduopolistic competition.
For the sake of simplicity, in the literature u is usuallyassumed to be constant (see for instance [36–40]), that is,the demand curve p(1 Tq) is linear. In this case, Cournotequilibrium is equivalent to a monotone VI model (see [28]for a monotony definition) and to a quadratic convexoptimisation problem (see [41] for the proof). In thispaper, a novel algorithm for VI problems is proposed tofind a Cournot equilibrium when concave demand curvesare considered, leading to a more realistic and generalmodelling. As will be proved, in this case the VI problemscan be non-monotone.
3 Overview of the proposedmethodologyThis paper assumes that functions hi
j and gil of system (5) are
linear (as in other similar papers, see for example [11]). Evenin this case, the non-linear functions u(1 Tq)qi and ki
lgil of (5)
(the latter are the so-called complementary slacknessconditions, see [35]), make difficult the resolution of the
0The Institution of Engineering and Technology 2010
equilibrium constraints by using traditional optimisationtechniques.
Let us then consider the following vectorial functionF ¼ (F1, . . . , FI) and region X
Fi(q) ¼ cmi(qi)þ u 1Tq� �
qi � p 1Tq� �
, i ¼ 1, I
X ¼
�q : h
ji(qi) ¼ 0, gl
i (qi) � 0, j ¼ 1, mi ,
l ¼ 1, ni , i ¼ 1, I
� (6)
Since functions gik and hi
k are linear, system (5) is equivalent tothe VI model VI(X, F ) – with the above function F andregion X – which consists in finding a solution q� whichsatisfies (see [28] for the proof of such equivalence). (notethat if constraints in X are not necessary, it is easy to showthat the unique vector F(q�) that satisfies (7) is the zerovector, in which case q� is logically an equilibrium since Fi
coincides with 2@pi/@qi)
F(q�)T(q � q�) � 0 8q [ X (7)
On the one hand, the above equivalence allows to use somebasic results of the VI theory (see Section 3 of [28]) topropose and analyse existence and uniqueness conditions ofCournot equilibriums. In particular, Appendices 9.1 and9.2 prove the following results when solving the problemaddressed in this paper:
† Sufficient conditions for equilibrium existence are: boundedproductions (always satisfied in real problems, see Appendix9.1) and the differentiability of the cost functions ci(qi) andof the demand curve p(1Tq). Twice differentiable functionsare only necessary to ensure maximum profits [see (4)].
† Monotony of VI(X, F) is not always satisfied. Thereforesufficient conditions described in [28] are not verified (seeAppendix 9.2 for more details), typically leading to morethan one equilibrium point (see [28, 42]).
On the other hand, the mentioned equivalence alsoallows applying general resolution algorithms for VIproblems to obtain Cournot equilibriums. These
algorithms usually compute a sequence of productions
fqkg that solve a sequence of VI problems fVI(X, Fk)g
(henceforth referred as sub-problems). Each sub-problemVI(X, Fk) is simpler than the original VI(X, F ) since Fk
approximates F, and it is equivalent to a Cournot sub-game which is also simpler than the original Cournotgame described in (5).
However, to solve non-linear systems such as (5), the abovedescribed algorithms have several well-known drawbacks (see[28]): (i) the evaluation of the profit functions pi derivativesand of their Jacobian matrices which are usually very complex;
IET Gener. Transm. Distrib., 2010, Vol. 4, Iss. 2, pp. 268–280doi: 10.1049/iet-gtd.2008.0344

IETdo
www.ietdl.org
(ii) the resolution of each VI sub-problem VI(X, Fk); and (iii)their usual local convergence.
The algorithm proposed in this paper is based on theprojection algorithms described in [18], but adapted andsimplified for Cournot equilibrium modelling. It onlyneeds the evaluation of the profit functions pi derivativesat VI(X, Fk) solutions, does not require Jacobianevaluations, and is globally convergent, althoughmonotony of VI(X, F ) is desirable to increase efficiency.In addition, an easy convex-quadratic optimisation modelis used to solve each VI sub-problem VI(X, Fk), and itsdual information allows to evaluate the pi derivatives in avery easy way.
The next section describes this algorithm when the problemVI(X, F) is monotone in region X. Intuitively, monotony ofVI(X, F) in X implies that F is a globally increasing functionin X, that is, a globally concave profit functionp ¼ (p1, . . . , pI) in X.
Gener. Transm. Distrib., 2010, Vol. 4, Iss. 2, pp. 268–280i: 10.1049/iet-gtd.2008.0344
4 Algorithm for monotone VIproblemsLet us assume that problem VI(X, F ) is monotone in X.Then, let Fi
k be the components of the function Fk inVI(X, Fk) defined as follows: (i) Fi
k are the same as Fi (see(6)) but evaluating the demand slope u at the demand1 Tqk, where qk is the productions vector defined in step 4of the algorithm; (ii) Fi
k includes a linear term a . (qi 2 qik)
to find a decreasing direction of the distance between qk
and the Cournot equilibrium q� (as Appendix 9.3 proves).Therefore function Fk is given by
F ki (q) ¼ cmi(qi)þ u(1Tqk)qi � p(1Tq)þ a(qi � qk
i ) (8)
where a is a positive parameter such that
a .(umax � umin)Maxi¼1,I {qmaxi}
ffiffiffiIp
1(9)
Figure 1 Algorithm 1: monotone case
271
& The Institution of Engineering and Technology 2010

27
&
www.ietdl.org
1 . 0 being the algorithm tolerance, umax and umin themaximum and minimum values of the demand slope u,respectively (boundary property is reasonable since demandslope must be finite, apart from monopolistic situations),and qmaxi the agents’ maximum productions. As it is provedin Appendix 9.3, condition (9) ensures that each iterativesolution effectively decreases the distance to the equilibriumpoint, and therefore that convergence is attained.
Then, the proposed algorithm is given in Fig. 1:
The following remarks can be made for the application andthe understanding of the algorithm given in Fig. 1:
† In step 1, VI sub-problem VI(X, Fk) can be solved withthe following quadratic optimisation model
MinQ,q[X
Xi¼1,I
ci(qi)þ u(1T qk)q2
i
2
( )�
ðQ
0
p(u)duþa
2kq � qk
k2
s:t: Q ¼ 1Tq (12)
hji(qi) ¼ 0 8j ¼ 1, mi
gli (qi) � 0 8l ¼ 1, ni
), 8i ¼ 1, I
Indeed, the KKT conditions of problem (12) coincide with theequilibrium conditions of VI(X, Fk), shown in (13) (see [11]for the proof when the demand curve is linear)
p 1Tq� �
¼ u 1Tqk� �
qi þ cmi qi
� �þa qi � qk
i
� �þX
j¼1,mi
hji
@hji qi
� �@qi
þX
l¼1,ni
kli
@gli qi
� �@qi
hji qi
� �¼ 0 j ¼ 1, mi
gki qi
� �� 0
kli g
li qi
� �¼ 0
kki � 0
8><>:
9>=>; l ¼ 1, ni
8>>>>>>>>>>>>>><>>>>>>>>>>>>>>:
9>>>>>>>>>>>>>>=>>>>>>>>>>>>>>;
, i ¼ 1, I
(13)
Appendix 9.4 proves that second order sufficiency conditionsare also satisfied.
† In step 2, the condition kqk 2 qkk , 1 is used to check
the convergence of the sequence fkqk 2 qkkg to 0, that is, of
fFkg to F (see (8)), which, taking limits in (10), leads to (14)
F q�� �T
q � q�� �
� 0 8p [ X
q� ¼ Limk!1
qk¼ Lim
k!1qk
(14)
Therefore if fkqk 2 qkkg converges to 0, as proved
in Appendix 9.3, fqkg and fqk
g converge to the equilibrium q�.
† As (12) shows, parameter a penalises the distance fromsolutions qk to productions qk fixed at each iteration.
2The Institution of Engineering and Technology 2010
Although according to Appendix 9.3 convergence isensured for monotone problems and for every a, thealgorithm efficiency can be significantly compromised whena is large, that is, when 1 is small [see (9)], being evenworse when the initial solution q1 is far from theequilibrium q�. To avoid this drawback, step 3 proposes asequence of positives and decreasing tolerances 1k with alarge initial value 11 to generate a set of increasingpenalisation parameters ak with usually a small value fora1. This procedure, which iteratively updates theconvergence criterion, can be applied without anyadditional hypotheses, since Appendix 9.3 proves thatconvergence is attained for any tolerance 1 . 0 (in [43] avery similar approach to increasing efficiency is proposed,but to solve optimisation models with penalised equalityconstraints). In addition step 3 proposes a procedure toincrease efficiency, consisting in the re-initialisation of thetolerances 1k (as [43] also proposes). In this case, when thenumber of iterations for 1k-convergence reaches a prefixedinteger parameter nmax, the tolerance 1kþ1 is set to a highervalue similar to 11. This could also be applied when thedistance between qk and qk does not sufficiently decreasebetween two consecutive iterations (see [43]).
† The aim of step 4 is to move the production vector qk
towards the hyper-plane H(qk) (see Fig. 2), leading to anew vector zk which is closer to the equilibrium q�, sinceH(qk) separates qk from q� (see Appendix 9.3 for theproof). Note that to evaluate F at qk (in fact, to calculateprofits derivatives at qk, see (11)), the computation of themarginal costs cmi at q
ik are required. This can be done
without costs minimisation problems, simply by using thedual information of (12) and applying the followingequation [obtained from (13)]
cmi qk
i
� �¼ �u 1Tqk
� �qk
iþ p 1Tqk
� �� a qk
i� qk
i
� �
�X
j¼1,mi
hj
i
@hj
i qk
i
� �@qi
�X
l¼1,ni
kli
@gli qk
i
� �@qi
(15)
In addition, the projection PrX over X also required in this step,
Figure 2 Iteration k of Algorithm 1
IET Gener. Transm. Distrib., 2010, Vol. 4, Iss. 2, pp. 268–280doi: 10.1049/iet-gtd.2008.0344

IEdo
www.ietdl.org
generates a vector qkþ1 ¼ PrX(zk), which is a feasible solutioncloser to q� than qk (see Appendix 9.3). Note that feasibilityis necessary for the proper definition of VI(X, Fk). ProjectionPrX is computed with the following quadratic optimisationmodel that minimises the distance between zk and region X
Minq[X
(zk� q)T(zk
� q) (16)
qkþ1 ¼ PrX(zk) being the optimal solution of the aboveminimisation model. Finally, parameter bk must be fixed in(0, 2) to ensure convergence (see Appendix 9.3), being aselection of bk ¼ 1 the condition to impose that vector zk isin the hyper-plane H(qk), while a selection of bk in theinterval (1, 2) or in (0, 1) corresponds, respectively, with anover-relaxation (vector zk pierces hyper-plane H(qk)) andinfra-relaxation (zk does not pierce hyper-plane H(qk)) of thelinear finding (see Fig. 2 and [18]).
5 Algorithm for non-monotoneVI problemsSince the hyper-plane H(qk) separates qk from q� (see Fig. 2),
and since F(qk)T(qk 2 qk) . 0 (see Appendix 9.3, (33)), thefollowing condition holds
F(qk)T(qk� qk) � 0 (17)
Figure 3 Monotony step of Algorithm 1
T Gener. Transm. Distrib., 2010, Vol. 4, Iss. 2, pp. 268–280i: 10.1049/iet-gtd.2008.0344
As Appendix 9.3 shows, this condition ensures convergence ofthe algorithm, and it is satisfied for monotone VI problems.This section proposes an additional step to Algorithm 1given in Fig. 1 to ensure its convergence when (17) is notsatisfied, although convergence can be attain even when (17)is not satisfied (as it is also suggested in [18]), since (17) isonly a sufficient condition for convergence.
Let us firstly consider the so-called merit function M(q)(see [44]) to evaluate how good q is as a solution ofVI(X, F ). Since q� is a solution of VI(X, F) if and only ifq� ¼ PrX(q� 2 F(q�)) (see [45]), then M(q) is defined in[44] as follows
M(q) ¼ q � PrX q � F(q)� � (18)
with M(q) decreasing with the kindness of the solution qtested.
Assume now that (17) is not satisfied at a certain iterationk, that is
F(qk)T(q� � qk) . 0 (19)
In the worst case this could mean that vector qkþ1 is a worsesolution of VI(X, F ) than qk, that is, M(qkþ1) �M(qk). Letus now consider a vector qk such that kqk 2 qk
k � 1
(otherwise, convergence is attained). In this caseAppendix 9.3 proves, without requiring monotonycondition (although monotony is required in Appendix9.3 for other proofs), that
F qk� �T
qk� qk
� �. 0 (20)
Inequalities (20) and (19) imply that vectors qk and q� are atthe same side of the hyper-plane H(qk), as Fig. 3 shows.
Let pk(u) ¼ qkþ u . (qk 2 qk) be, for a certain
u [ (21, 0) < (0, 1), a vector that verifies
F qk� �T
q� � pk uð Þ� �
� 0
F qk� �T
qk� pk uð Þ
� �. 0
(21)
that is, pk(u) is chosen in a hyper-plane H(qk, u) with anormal vector F(qk) that cut the segment [qk, q�].
Figure 4 Algorithm 2: step 5 for the non-monotone case?
273
& The Institution of Engineering and Technology 2010

27
&
www.ietdl.org
Figure 5 Production cost of agents and demand curve
Obviously pk(u) exists and can be found in the hyper-planethat crosses through the vectors qk and qk (see Fig. 3 forthe case in which q� is between H(qk) and H(qk, u),corresponding to values of u in (0, 1)).
Using pk(u) and similarly to (34), it can be proved that thevector pk(u, rk) shown in (22) is necessarily closer to q� thanqk. Moreover (see Appendix 9.3 for the monotonous case),the projection PrX of vector pk(u, rk) over X defines abetter production vector qkþ1 with lesser merit functionvalue (higher kindness) than qk. Then, for the non-monotone case, step 5 of Algorithm 1 must be replaced bythe Algorithm 2 given in Fig. 4.
Note that, when 1kþ1 is lesser than or equal to 1k, step 5requires computing M(qk) and M(qkþ1), using for instancea quadratic optimisation model similar to (16). Otherwisethe increase of the merit values M(qk) and M(qkþ1) isalways due to the re-initialisations of the tolerance.
In addition, since H(qk, u) must necessarily cut [qk, q�] in asetting of qk (see Fig. 3 when u [ (0, 1)), u can be chosen in asetting of 0 to satisfy (21). In particular, since u must bealways negative (when qk is closer to qk than q�) or mustalways belong to (0, 1) (when q� is closer to qk than qk, asoccurs in Fig. 3), two different values of u, u1 [ (21, 0)
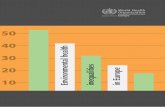
Figure 6 Merit values at each iteration with several initialproduction vectors
4The Institution of Engineering and Technology 2010
and u2 [ (0, 1), can be selected in a setting of 0 to satisfy(21). Nevertheless, other alternative heuristic procedures toselect u [ (21, 0) < (0, 1) satisfying (21), could be used.
6 Case studyThis section illustrates the proposed algorithm applied to aduopolistic competitive market. A more realistic applicationcan be found in [29], where the proposed methodology hasbeen applied to find an equilibrium for the Spanish electricitymarket. Although in [29], the solved case study is non-monotone and considers a real-size electricity system, itsexecution time is 4 h and 35 min, which is totally acceptablefor medium term operation and planning, proving theefficiency of the proposed approach even for realistic VI models.
The aim of the present case study is to show geometricallythe operation and convergence of the proposed algorithmwhen considering a duopolistic Cournot case. Fig. 5 showsthe production costs considered in this case study, whichare two linear piece convex functions, and the demandcurve, which is a four linear piece concave function.
To verify global convergence, Fig. 6 shows the merits ofthe productions qk when considering three different initialvectors q1. The first two correspond to maximum and nullproductions (q1 ¼ qmax, q1 ¼ 0), whereas the third one is
Figure 7 Convergence thresholds and penalty parametersat each iteration
IET Gener. Transm. Distrib., 2010, Vol. 4, Iss. 2, pp. 268–280doi: 10.1049/iet-gtd.2008.0344

IETdoi
www.ietdl.org
Figure 8 Contour curves and values of function F
the solution of the model described in [11] when the demandslope u has been chosen based on authors’ experience, beingconstant and equal to 0.113 E/q2.
It can be seen that convergence is faster when q1 is thevector of [11], since it is closer to the Cournot equilibriumthan the vectors q1 ¼ qmax and q1 ¼ 0. For the samereason, convergence is faster with q1 ¼ 0 than withq1 ¼ qmax (see Fig. 8). Fig. 6 also shows that meritfunctions between iterations 5 and 8 do not significantlydecrease. This is due to the too high value of the penaltyparameter ak that leads to a badly conditioned problem, asit was mentioned in Section 4. This drawback can besolved by applying the tolerance updating and re-initialisation of step 3 of Algorithm 1 in Fig. 1. Fig. 7shows the thresholds 1k and the corresponding penaltyparameters ak chosen in the updating process whenq1 ¼ qmax. It also shows that the algorithm generates a re-initialisation at iteration 8, since the maximum number ofiterations nmax to 1k-convergence has been established at 2(note that at iterations 6 and 7 the penalty parameters areconstant). In this re-initialisation the same threshold 11 ofiteration 1 has been used (that is, g ¼ 1, see steps 0 and 3of Algorithm 1).
Fig. 8 represents the vectors F ¼ (F1, F2) of (6) in a grid ofthe feasible region X, where darker zones correspond to largermodules of F. As mentioned in Section 3, the smaller themodule of vector F is, the higher the proximity to the
Gener. Transm. Distrib., 2010, Vol. 4, Iss. 2, pp. 268–280: 10.1049/iet-gtd.2008.0344
equilibrium. Fig. 8 also shows the contour curves offunctions F1 and F2, being the intersection of the zerocontour curves the sought equilibrium.
Using the same representation, Fig. 9 shows, at eachiteration, the production vector qk fixed, and the solution qk
of each sub-problem VI(X, Fk), being q1 ¼ qmax. The hyper-planes H(qk) that separate q� from qk are also represented by athick straight line.
As already noted, the distances between productions qk
and qk at iterations 5–8 are close to zero, but qk is lightlyfar from the equilibrium q�. The algorithm re-initialisationat iteration 9 provides a solution qk almost identical to theequilibrium q�.
7 ConclusionsThis paper proposes a new and powerful approach based onvariational inequalities theory to solve Cournot gamesmodels of competitive equilibriums. With this approach, ithas been possible to analyse the existence and uniquenessconditions of Cournot equilibriums in a easy way.Existence can be ensured by requiring twice differentiablecosts and demand curves, while sufficient conditions foruniqueness are not satisfied in general.
In addition, the proposed approach includes a novelglobally convergent variational inequalities algorithm to
275
& The Institution of Engineering and Technology 2010

276
&
www.ietdl.org
Figure 9 Solutions and hyper-planes of the proposed algorithm
obtain Cournot equilibriums, which is based on theprojection algorithms built in [18], but has been adaptedand improved for Cournot equilibriums modelling. Itconsists in the generation of hyper-planes that separateequilibriums from intermediate solutions obtained bysolving variational inequalities sub-problems. However,unlike [18] and other similar resolution approaches, thesesub-problems can be solved with standard quadratic andconvex optimisation. In addition, for monotone problems,only the evaluation of the profits derivatives for oneintermediate solution is required. These evaluations can becarried out using the dual information of the quadraticmodels, which makes additional resolutions of costminimisation problems unnecessary. Finally, anotheradvantage is the possibility of considering concave demandcurves instead of linear ones, which can be very useful inthe modelling of real markets, in particular electricitymarkets.
The potential application of the proposed algorithms is tosolve Cournot equilibriums when demand curves are notnecessary linear but concave. In this sense, a simple casestudy with concave demand curve has been presented toillustrate the operation of the proposed algorithm, and to
The Institution of Engineering and Technology 2010
check its global convergence. However, more complex andrealistic Cournot games have been efficiently solved withthe proposed algorithm being used for the simulation ofthe whole Spanish electricity market, even under non-monotone conditions. These results can be found in [46]and recently in [29]. Anyway, the detailed analyses ofconvergence properties for the non-monotone case needfurther research efforts.
8 References
[1] COURNOT A.A.: ‘Researches into mathematical principlesof the theory of wealth’, 1838
[2] DIXIT A.: ‘Comparative statics for oligopoly’, Int. Econ.Rev., 1986, 27, pp. 107–122
[3] DAUGHETY A.F.: ‘Cournot oligopoly. Characterization andapplications’ (Cambridge University Press, 1988)
[4] VIVES X.: ‘Oligopoly pricing’ (The MIT Press, 1999)
[5] SHAFFER S.: ‘A test of competition in Canadian banking’,J. Money, Credit Banking, 1993, 25, pp. 49–61
IET Gener. Transm. Distrib., 2010, Vol. 4, Iss. 2, pp. 268–280doi: 10.1049/iet-gtd.2008.0344

IETdo
www.ietdl.org
[6] BIKKER J.A.: ‘Competition and efficiency in a unifiedeuropean banking market’ (Edward Elgar, 2004)
[7] POMPERMAYER F.M., FLORIAN M., LEAL J.E.: ‘A spatial priceoligopoly model for refined petroleum products: anapplication to a Brazilian case’, Comput. Econ. Finance,Soc. Comput. Econ., 2002, 172
[8] GATES S., HUMES B.D., HOMES B.D.: ‘Games, information, andpolitics: applying game theoretic models to politicalscience’ (University of Michigan Press, 1997)
[9] VENTOSA M., BAILLO A., RAMOS A., RIVIER M.: ‘Electricitymarkets modelling trends’, Energy Policy, 2005, 33, (7),pp. 897–913
[10] DAY C., HOBBS B.F., PANG J.S.: ‘Oligopolistic competition inpower networks: a conjectured supply function approach’,IEEE Trans. Power Syst., 2002, 17, (3), pp. 597–607
[11] BARQUIN J., CENTENO E., RENESES J.: ‘Medium-termgeneration programming in competitive environments:a new optimisation approach for market equilibriumcomputing’, IEE Proc. Gener. Trans. Distrib., 2004, 151, (1),pp. 119–126
[12] CAMPOS F.A., VILLAR J., BARQUIN J.: ‘Application of possibilitytheory to robust Cournot equilibrium in electricity market’,Probab. Eng. Inf. Sci., 2005, 19, (4), pp. 519–531
[13] WEI J.Y., SMEERS Y.: ‘Spatial oligopolistic electricity modelswith cournot players and regulators transmission prices’,Oper. Res., 1999, 47, (1), pp. 102–112
[14] VENTOSA M., RIVIER M., RAMOS A., GARCIA-ALCALDE A.: ‘An MCPapproach for hydrothermal coordination in deregulatedpower markets’. Proc. IEEE PES Summer Meeting, 2000,vol. 4, pp. 2272–2277
[15] HOBBS B.F.: ‘Linear complementary models of Nash –Cournot competition in bilateral and POOLCO powermarkets’, IEEE Trans. Power Syst., 2001, 16, (2),pp. 194–202
[16] DAXHELET O., SMEERS Y.: ‘Variational inequality models ofrestructured electricity systems’, in FERRIS M.C.,MANGASARIAN O.L., PANG J.S. (EDS.) : ‘Complementary:applications, algorithms and extensions’ (Kluwer AcademicPublishers, 2001)
[17] SOLODOV M.V., TSENG P.: ‘Modified projection-typemethods for monotone variational inequalities’, SIAMJ. Appl. Math., 1996, 3, pp. 28–41
[18] SOLODOV M.V.: ‘A class of globally convergent algorithms forpseudomonotone variational inequalities’, in FERRIS O.L.M.A.J.-
S.P.M.C. (ED.): ‘Complementarity: applications, algorithms andextensions’ (Kluwer Academic Publishers, 2001)
Gener. Transm. Distrib., 2010, Vol. 4, Iss. 2, pp. 268–280i: 10.1049/iet-gtd.2008.0344
[19] NOOR M.A.: ‘Projection-splitting algorithms formonotone variational inequalities’, Comput. Math. Appl.,2000, 39, pp. 73–79
[20] AMES W.F.: ‘Numerical methods for partial differentialequations’ (New York Academic Press, 1992)
[21] NOOR M.A.: ‘A modified extragradient method formonotone variational inequalities’, Comput. Math. Appl.,1997, 26, pp. 229–255
[22] NOOR M.A.: ‘Some algorithms for general monotonemixed variational inequalities’, Math. Comput. Model.,1999, 29, (7), pp. 1–9
[23] SUN D.: ‘An interative method for solvingvariational inequality problems and network equilibriumproblems’, Numer. Math.: J. Chin. Univ., 1994, 16,pp. 145–153
[24] SOLODOV M.V., TSENG P.: ‘Modified projection-typemethods for monotone variational inequalities’, SIAMJ. Control Optim., 1996, 34, pp. 1814–1830
[25] BONETTINI S., FEDERICA T.: ‘A nonmonotone semismoothinexact Newton method’, Optim. Methods Softw., 2007,22, (4), pp. 637–657
[26] TAJI K., MIYAMOTO M.: ‘A globally convergent smoothingNewton method for nonsmooth equations and itsapplication to complementarity problems’, Comput.Optim. Appl., 2002, 22, (1), pp. 81–101
[27] VENTOSA M., RAMOS A., RIVIER M.: ‘Modeling profitmaximization in deregulated power markets byequilibrium constraints’. 13th Power Systems ComputationConf. (PSCC’99), Trondheim, Norway, 1999
[28] HARKER P.T., PANG J.S.: ‘Finite-dimensional variationalinequality and nonlinear complementary problems:a survey of theory, algorithms and applications’, Math.Program., 1990, 48, (2), pp. 161–220
[29] CAMPOS F.A., VILLAR J., BARQUIN J., RENESES J.: ‘Variationalinequalities for solving possibilistic risk-averse electricitymarket equilibrium’, IET Gener. Trans. Distrib., 2008, 2,(5), pp. 632–645
[30] SZIDAROVSZKY F., YAKOWITZ S.: ‘A new proof of the existenceand uniqueness of the cournot equilibrium’, Int. Econ. Rev.,1977, 18, (3), pp. 787–789
[31] NOVSHEK W.: ‘On the existence of Cournot equilibrium’,Rev. Econ. Stud., 1985, 52, (1), pp. 85–98
[32] KOLSTAD C.D., MATHIESEN L.: ‘Necessary and sufficientconditions for uniqueness of a Cournot equilibrium’, Rev.Econ. Stud., 1987, 54, (4), pp. 681–690
277
& The Institution of Engineering and Technology 2010

27
&
www.ietdl.org
[33] KOLSTAD C.D., MATHIESEN L.: ‘Computing Cournot– Nashequilibria’, Oper. Res., 1991, 39, (5), pp. 739–748
[34] BAILLO A.: ‘A methodology to develop optimal schedulesand offer strategies for a generation company operating ina short-term electricity market’. PhD dissertation, PontificiaComillas de Madrid, 2002
[35] MORDECAI A.: ‘Nonlinear programming: analysis andmethods’ (Dover Publishing, 2003)
[36] HASHIMOTO H.: ‘A spatial Nash equilibrium model’, inSpatial price equilibrium: advances in theory, computationand application (Springer-Verlag, Berlin, 1985), pp. 20–40
[37] WEN F.S., DAVID A.K.: ‘Oligopoly electricity marketproduction under incomplete information’, IEEE PowerEng. Rev., 2001, 21, (4), pp. 58–61
[38] MURPHY F.H., SMEERS Y.: ‘Generation capacity expansion inimperfectly competitive restructured electricity markets’.Center for Operations Research and Econometrics (CORE) –Discussion Paper 2002/69, Universite Catholique deLouvain, Belgium, 2002
[39] SONG Y., NI Y., WEN F.S., HOU Z., WU F.F.: ‘Conjecturalvariation based bidding strategy in spot markets:fundamentals and comparison with classical gametheoretical bidding strategies’, Electr. Power Syst. Res.,2003, 67, pp. 45–51
[40] CENTENO E., RENESES J., BARQUIN J.: ‘Strategic analysis ofelectricity markets under uncertainty: a conjectured-price-response approach’, IEEE Trans. Power Syst., 2007, 22, (1),pp. 423–432
[41] KONNOV I.: ‘Combined relaxation methods forvariational inequalities’ (Springer, 2001)
[42] WINTER L.: ‘A convergent algorithm for the multimodaltraffic equilibrium problem’ (Le Chesnay Cedex, France,2001)
[43] FIACCO A.V., MCCORMICK G.P.: ‘Nonlinearprogramming: secuencial unconstrained minimizationtechniques’ (Wiley, New York, Reprinted by SIAMpublications (1990), 1968
[44] LARSSON T., PATRIKSSON M.: ‘A class of gap functions forvariational inequalities’, Math. Program., 1994, 64, pp. 53–79
[45] FACCHINEI F., PANG J.S.: ‘Finite-dimensional variationalinequalities and complementarity problems’ (Springer,New York, 2003)
[46] CAMPOS F.A.: ‘Modelo posibilista del mercado de energıaelectrica a medio plazo en un entorno liberalizado’. PhDdissertation, Universidad Pontificia Comillas, 2005
8The Institution of Engineering and Technology 2010
9 Appendix9.1 Sufficiency conditions for theequilibrium existence
VI theory establishes as sufficient conditions for the existenceof solutions that region X is convex and compact, and thatfunction F is continuous in X (see [28]). On the one hand,convexity condition is satisfied since X is a polyhedron(since hi
j and gik are linear functions). On the other hand,
since X is a closed set (X is a polyhedron), the compacitycondition of X holds if X is a bounded set, which is truesince maximum productions qmaxi is a necessary constraintin realistic market models. Finally, the continuity conditionof function F holds if and only if marginal costs cmi(qi) anddemand slope u(1 Tq) are continuous functions. Thereforeit is necessary that productions costs ci(qi) and demandcurve p(1 Tq) are differentiable functions.
9.2 Monotony of the proposed VIproblem
Let us prove that VI(X, F ) is non-monotone, that is, that twoproduction vectors q and q0 exist such that
Xi¼1,I
F i(q)� F i q0� �� �
qi � q0i� �
, 0 (23)
where
Xi¼1,I
F i(q)� F i q0� �� �
qi � q0i� �
¼ p 1Tq0� �
� p 1Tq� �� �
1Tq � 1Tq0� �
þXi¼1,I
cmi qi
� �� cmi q0i
� �� �qi � q0i� �
þXi¼1,I
u 1Tq� �
qi � u 1Tq0� �
q0i
� �qi � q0i� �
(24)
Assume a duopoly market with the differentiable demandcurve shown in Fig. 10, which has a slope function u
satisfying u(D0 2 d) ¼ 0 and u(D0) ¼M, d and M beingpositive parameters such that D0 2 d . 0.
Let us consider now the following production vectors q and q0
q1 ¼ D0� g, q2 ¼ g
q01 ¼ D0� d, q02 ¼ 0
(25)
g being a positive value with g . d and D0 2 g � 0.
Then, if constant marginal costs are assumed, (24)becomesX
i¼1,I
Fi(q)� Fi q0� �� �
qi � q0i� �
¼ p(D0� d)dþ 0
þM 2g2� gdþD0(d� g)
� �(26)
IET Gener. Transm. Distrib., 2010, Vol. 4, Iss. 2, pp. 268–280doi: 10.1049/iet-gtd.2008.0344

IETdo
www.ietdl.org
Taking limits in D0 and maintaining fixed d, since g . d andsince p(D0 2 d) is constant, it is easy to prove that
limD0!1
Xi¼1,I
F i(q)� F i(q0)� �
qi � q0i� �
¼ �1 (27)
Thus, a parameter D0 exists such that (26) is negative, andtherefore F cannot be monotone. Since sufficient conditionsof [28] require strong monotony in F for uniqueness, itcannot be proved that the proposed equilibrium is unique.
Note that according to (24) and to the above results, F ismonotone when strictly decreasing and bounded secondderivatives demand curves (see Fig. 10) are considered,which occurs in many real markets models, since quasi-linear and quasi-inelastic demand curves are consideredsuitable representations (see [9]).
9.3 Convergence of the algorithm
To prove convergence of the proposed algorithm, it must beproved that sequences fqk
g and fqkg converge to the
equilibrium q�. This means that fqkg must be a convergent
sequence, and that the following condition holds
Limk!1
qk� qk
¼ 0 (28)
Let us reason by reduction ad absurdum. Let us suppose thatthere exists 1 . 0 and a natural number k(1) such that for anyk � k(1) the following condition holds (in the following, forthe sake of brevity condition k � k(1) will be omitted)
qk� qk
� 1 (29)
First, let us prove that Solodov lemma (see [18]) can beapplied for each iteration, that is, that the hyper-planeH(qk) separates qk from q�, that is, that F(qk)T(qk 2 qk) . 0and F(qk)T(q� 2 qk) � 0. Since qk solves VI(X, Fk) and
Figure 10 Demand curve for monotony validation
Gener. Transm. Distrib., 2010, Vol. 4, Iss. 2, pp. 268–280i: 10.1049/iet-gtd.2008.0344
qk [ X then
F k qk� �T
qk� qk
� �¼Xi¼1,I
cmi qk
i
� �þ u 1Tqk
� �qk
i
h
þa qk
i� qk
i
� �iqk
i � qk
i
� �� 0 (30)
Rearranging terms
F qk� �T
qk� qk
� �� u 1Tqk
� �� u 1Tqk
� �� �
�Xi¼1,I
qk
iqk
i � qk
i
� �þ a qk
� qk 2
(31)
The first addend of the right side of (31) is bounded as
follows
Note that
Pi¼1,I
xi
�� ���2
¼P
i
x2i þ
Pi,j
2 xi
�� �� xj
��� ���� ��
Pi¼1,I
x2i þ
Pi,j
x2i þ x2
j
� �¼ I
Pi¼1,I
x2i
�
u 1Tqk� �
� u 1Tqk� �� �X
i¼1,I
qk
iqk
i � qk
i
� �����������
� u 1Tqk� �
� u 1Tqk� ���� ��� X
i¼1,I
qk
i
��� ��� qki � qk
i
��� ���� umax � umin
� �Maxi¼1,I
qmaxi
n oXi¼1,I
qki � qk
i
��� ���� umax � umin
� �Maxi¼1,I
qmaxi
n o ffiffiffiIp
qk� qk
(32)
Then, if s ¼ a 2 (K/1) and K ¼ (umax 2 umin) .
Maxi¼1,I.fqmaxig.
pI, (31), (32) and (9) imply
F qk� �T
qk� qk
� �� � umax � umin
� �Maxi¼1,I
qmaxi
n o
�ffiffiffiIp
qk� qk
þ a qk� qk
2
¼ �K qk� qk
þ a qk� qk
2
� �K qk� qk
qk� qk
1
þ a qk� qk
2
¼ a�K
1
�qk� qk
2¼ s qk
� qk 2
(33)
Therefore since skqk 2 qkk
2� s . 12 . 0 then
F(qk)T(qk 2 qk) . 0 (note that a must be selected such thata . K/1 and thus s . 0).
In addition, to prove F(qk)T(q� 2 qk) � 0 it is sufficientthat (F(qk) 2 F(q�))T(qk 2 q�) � 0, which is true since F ismonotone, allowing the application of Solodov lemma.Since kqkþ1 2 q�k � kzk(bk) 2 q�k (because qkþ1 is in X
279
& The Institution of Engineering and Technology 2010

28
&
www.ietdl.org
since it is the projection of zk(bk) over X ), Solodov lemmaand (33) imply
qkþ1�q�
� zk bk� ��q�
� qk�q�
�bk 2�bk� � F qk
� �T
qk�qk
� �F qk� �
0B@
1CA
2
� qk�q�
�bk 2�bk� � s qk
�qk 2
F qk� �
0B@
1CA
2
(34)
Therefore fkqk 2 q�kg is a decreasing sequence, and since it islower bounded, then it is convergent. Taking limits in k inthe above inequality (since it is satisfied for k � k(1)), then
Limk!1
s qk� qk
2
F qk� � ¼ 0 (35)
Since F is continuous in a compact X (X is closed because ofthe agent’s maximum productions) then F is bounded, thatis, M . 0 exists such that kF(q)k �M. Therefore
s qk� qk
2
F qk� � �
s
M
� �qk� qk
2� 0 (36)
0The Institution of Engineering and Technology 2010
Taking limits in k (36) leads to
Limk!1
qk� qk
¼ 0 (37)
which is in contradiction with (29).
In addition, it has been proved that for any 1 . 0 and ksuch that kqk 2 qk
k � 1, condition kqkþ1 2q�k � kqk 2 q�kholds true, that is fkqk 2 q�kg is a decreasing and aconvergent sequence, and thus fqk
g is also convergent.
9.4 Sub-problem second-order sufficiencyconditions
This section proves that a solution to problem (12) is a globalminimum, that is the Hessian matrix H of its Lagrangefunction must be positive definite. Matrix H, whichcontains the second derivatives of the objective function of(12) with respect to q and Q (since constraints h i
j ¼ 0 andgi
l� 0 are linear), is equal to
H ¼M 0
0 �@p(Q)
@Q
24
35 (38)
where M is an I dimensional and diagonal matrix withelements u(1 Tqk)þ aþ (@cmi/@qi), which are positive sincemarginal costs cmi are differentiable and increasingmonotone functions. In addition, since the demand curve isa decreasing function, the remaining term 2@p(Q)/@Q inthe main diagonal of H is positive since it coincides withthe opposite of the demand curve derivative (i.e. with u(Q)).
IET Gener. Transm. Distrib., 2010, Vol. 4, Iss. 2, pp. 268–280doi: 10.1049/iet-gtd.2008.0344