Soft Computing Technique Based Reactive Power Planning using Combining Multi-objective Optimization...
10
International Electrical Engineering Journal (IEEJ) Vol. 5 (2014) No.10, pp. 1576-1585 ISSN 2078-2365 http://www.ieejournal.com/ Vadivelu and Marutheswar Soft Computing Technique Based Reactive Power Planning using Combining Multi-objective Optimization with Improved Differential Evolution 1576 Soft Computing Technique Based Reactive Power Planning using Combining Multi-objective Optimization with Improved Differential Evolution 1 K.R.Vadivelu and 2 Dr.G.V.Marutheswar 1 [email protected], 2 [email protected] Abstract:This paper proposes an application of Fast Voltage Stability Index (FVSI) to Reactive Power Planning (RPP) using Combining Multi-objective optimization with Improved Differential Evolution (CMIDE). FVSI is used to identify the weak buses for the Reactive Power Planning problem which involves process of experimental by voltage stability analysis based on the load variation. The point at which Fast Voltage Stability Index close to unity indicates the maximum possible connected load and the bus with minimum connected load is identified as the weakest bus at the point of bifurcation. The proposed approach has been used in the IEEE 30-busand 72 bus Indian utility systems. The result obtained by the proposed algorithm are found to be better than Differential Evolution(DE) and other algorithms reported in literature in terms of reduction in system losses and improvement of voltage stability with the use of Fast Voltage Stability Index combining Multi-objective Reactive Power Planning with Improved Differential Evolution. Key Words:Power systems, Reactive Power Planning, Fast Voltage Stability Index, Differential Evolution, Improved Differential Evolution, Multi-objective optimization. 1. INTRODUCTION During the last decades, there has been a increasing concern in the Reactive Power problems for the security and economy of power systems [2]-[7]. Conventional calculus based optimization algorithms have been used in RPP for years [2]-[4]. Conventional optimization methods are based on successive linearization and use the first and second differentiations of objective function. Since the formulae of RPP problem are hyper quadric functions, linear and quadratic treatments induce lots of local minima. The new methods based on artificial intelligence have been used for RPP which selects the weak buses randomly or heuristically [5]-[7].Multi-objective Reactive power planning is a complex problem in which several problems like power loss, voltage deviation and Investment cost of the devices. The Decision making process in Multi-objective is complex and it faced with multiple objects. The Multiple objectives in a problem gives out a set of optimal solutions, Known as the Pareto Optimal solutions. The Decision Making has to choose an optimal solution by generating many Parento solution as possible from which optimal solution can be chosen [1], [3]. The authors in [18] discussed a hierarchical reactive power planning that optimizes a set of corrective controls such that solution satisfies a given voltage stability margin. Evolutionary algorithms (EAs) Like Genetic Algorithm [GE], Differential Evolution [3], and Evolutionary programming (EP) have been widely exploited during the last two decades in the field of engineering optimization. They are computationally efficient in finding the global best solution for reactive power planning and will not to be get trapped in local minima. Such intelligence combining multi objective optimization with differential Evolution algorithms [16] are used. This paper proposes an application of FVSI to identify the weak buses for the RPP problem using soft computing technique based combining multi objective optimization with Improved Differential Evolution(DE) [12],[17]. The variation of slow reactive power loading towards its maximum point causes the traditional load flow solution to reach its non-convergence point. Beyond this point, the ordinary load flow solution does not converge, which in turn forces the system to reach the voltage stability limit prior to bifurcation in the system. The margin measured from the base case solution to the maximum convergence point in the load flow computation determines the maximum loadability at a particular bus in the system. Solvability of load flow can be achieved before a power system network reaches its bifurcation point [9]-[10],[13]. The Maximum loadabilty is estimated through voltage stability analysis. Voltage stability analysis is conducted using the stability index, FVSI [8], [12],[13]. The reactive power at a particular bus is increased until it reaches the instability point at bifurcation. At the instability point, the connected load at the particular bus is determined as the loadability maximum. The maximum loadability for each load bus will be sorted in ascending order with the smallest value being ranked highest. The highest rank implies the weak bus in the system that has the lowest sustainable load. The proposed approach has been used in the
-
Upload
ieejournal -
Category
Documents
-
view
1 -
download
0
Transcript of Soft Computing Technique Based Reactive Power Planning using Combining Multi-objective Optimization...
International Electrical Engineering Journal (IEEJ)
Vol. 5 (2014) No.10, pp. 1576-1585
ISSN 2078-2365
http://www.ieejournal.com/
Vadivelu and Marutheswar Soft Computing Technique Based Reactive Power Planning using Combining Multi-objective Optimization with Improved Differential Evolution
1576
Soft Computing Technique Based Reactive
Power Planning using Combining
Multi-objective Optimization with Improved
Differential Evolution 1K.R.Vadivelu and 2Dr.G.V.Marutheswar
[email protected],[email protected]
Abstract:This paper proposes an application of Fast Voltage
Stability Index (FVSI) to Reactive Power Planning (RPP) using
Combining Multi-objective optimization with Improved
Differential Evolution (CMIDE). FVSI is used to identify the
weak buses for the Reactive Power Planning problem which
involves process of experimental by voltage stability analysis
based on the load variation. The point at which Fast Voltage
Stability Index close to unity indicates the maximum possible
connected load and the bus with minimum connected load is
identified as the weakest bus at the point of bifurcation. The
proposed approach has been used in the IEEE 30-busand 72 bus
Indian utility systems. The result obtained by the proposed
algorithm are found to be better than Differential
Evolution(DE) and other algorithms reported in literature in
terms of reduction in system losses and improvement of voltage
stability with the use of Fast Voltage Stability Index combining
Multi-objective Reactive Power Planning with Improved
Differential Evolution.
Key Words:Power systems, Reactive Power Planning, Fast
Voltage Stability Index, Differential Evolution, Improved
Differential Evolution, Multi-objective optimization.
1. INTRODUCTION
During the last decades, there has been a increasing concern
in the Reactive Power problems for the security and economy
of power systems [2]-[7]. Conventional calculus based
optimization algorithms have been used in RPP for years
[2]-[4]. Conventional optimization methods are based on
successive linearization and use the first and second
differentiations of objective function. Since the formulae of
RPP problem are hyper quadric functions, linear and
quadratic treatments induce lots of local minima. The new
methods based on artificial intelligence have been used for
RPP which selects the weak buses randomly or heuristically
[5]-[7].Multi-objective Reactive power planning is a
complex problem in which several problems like power loss,
voltage deviation and Investment cost of the devices. The
Decision making process in Multi-objective is complex and it
faced with multiple objects. The Multiple objectives in a
problem gives out a set of optimal solutions, Known as the
Pareto Optimal solutions.
The Decision Making has to choose an optimal solution by
generating many Parento solution as possible from which
optimal solution can be chosen [1], [3]. The authors in [18]
discussed a hierarchical reactive power planning that
optimizes a set of corrective controls such that solution
satisfies a given voltage stability margin. Evolutionary
algorithms (EAs) Like Genetic Algorithm [GE], Differential
Evolution [3], and Evolutionary programming (EP) have
been widely exploited during the last two decades in the field
of engineering optimization. They are computationally
efficient in finding the global best solution for reactive power
planning and will not to be get trapped in local minima. Such
intelligence combining multi objective optimization with
differential Evolution algorithms [16] are used. This paper
proposes an application of FVSI to identify the weak buses
for the RPP problem using soft computing technique based
combining multi objective optimization with Improved
Differential Evolution(DE) [12],[17].
The variation of slow reactive power loading towards its
maximum point causes the traditional load flow solution to
reach its non-convergence point. Beyond this point, the
ordinary load flow solution does not converge, which in turn
forces the system to reach the voltage stability limit prior to
bifurcation in the system. The margin measured from the
base case solution to the maximum convergence point in the
load flow computation determines the maximum loadability
at a particular bus in the system. Solvability of load flow can
be achieved before a power system network reaches its
bifurcation point [9]-[10],[13]. The Maximum loadabilty is
estimated through voltage stability analysis. Voltage stability
analysis is conducted using the stability index, FVSI [8],
[12],[13]. The reactive power at a particular bus is increased
until it reaches the instability point at bifurcation. At the
instability point, the connected load at the particular bus is
determined as the loadability maximum. The maximum
loadability for each load bus will be sorted in ascending order
with the smallest value being ranked highest. The highest
rank implies the weak bus in the system that has the lowest
sustainable load. The proposed approach has been used in the

International Electrical Engineering Journal (IEEJ)
Vol. 5 (2014) No.10, pp. 1576-1585
ISSN 2078-2365
http://www.ieejournal.com/
Vadivelu and Marutheswar Soft Computing Technique Based Reactive Power Planning using Combining Multi-objective Optimization with Improved Differential Evolution
1577
RPP problems for the IEEE 30-bus system which consists of
six generator buses, 21 load buses and 41 branches of which
four branches, (6,9), (6,10), (4,12) and (28,27) are under load
tap-setting transformer branches. Based on FVSI technique
the reactive power source installation buses are identified as
30, 26, 29 and 25. There are totally 14 control variables.
2. NOMENCLATURE
Bij=mutual susceptance between bus i and j
CCi=per unit VAr source purchase cost at bus i
dl= duration of load level l
ei= fixed VAr source installment cost at bus i
Gii,Bii= self-conductance and susceptance of bus i
Gij=mutual conductance between bus i and j
gk= conductance of branch k
NB= set of numbers of total buses
NC = Set of numbers of possible VAR source instalment bus
NE= set of branch numbers
Ng= set of generator bus numbers
NI =set of numbers of load level durations
Ni=set of numbers of buses adjacent to bus i including bus i
NPQ= set of PQ bus numbers
NQglim= set of numbers of buses in which reactive power over
limits
NT =set of numbers of tap setting transformer branches
NVlim= set of numbers of buses in which voltage over limits
QCi= VAr source installed at bus i
Qgi= reactive power generation at bus i
Qi= reactive power injected into network at bus i
Tk= Tap setting of branch k
Vi= voltage magnitude at bus i
Ѳij= voltage angle difference between bus i and bus j
h = per unit energy cost
3. PROBLEM FORMULATION
The impartial function [6] in RPP problem includes of two
terms, the total cost of energy loss and the cost of reactive
power source installation which is given by:
Minimize: c c cf W I (1)
The first term W represents the total cost of energy loss as
follows:
l
c l lossl
l N
W h d P
(2)
Where, losslP is the network real power loss during the
period of load level d1and is given be equation:
1
2 2
,1 2loss k i j i j ij
k N
P g V V VV Cos
(3)
The second term cI represents the cost of VAR source
installments which has two components namely a fixed
installation cost and variable cost.
c i ci ci
i Nlc
I e C Q
(4)
Where is ciQ reactive power source installation at bus I and
ciQ can be either positive or negative, depending on whether
the installation is capacitive or reactive. Therefore, absolute
values are used to compute the cost. The above two equations
are put in one equation to obtain a comprehensive one.
Minimization of voltage deviation
Bus voltage is one of the most security and service quality
indices. To improve the voltage profile the load bus voltage
deviation should be minimized. This can be calculated
F3= ∑ |Vi − 1.0|NLi (5)
Where
NL = No. of load buses
Vi = Voltage Magnitude of bus i
The RPP problem is subjected to the following equality and
inequality constraints:
(i) Real power balance equation:
1
cos sin 0;BN
i i j ij ij ij ij
j
P V V G B
11,2,...... Bi N (6)
(ii) Reactive power balance equation:
1
cos sin 0;BN
i i j ij ij ij ij
j
Q V V G B
1,2,...... PQi N (7)
(iii) Slack bus real power generation limit:
min max
s s sP P P
(8)
(iv) Generator reactive power generation limit:
min max
gi gi gi PVQ Q Q i N (9)
(v) Generator bus voltage limit:
min max
gi gi gi BV V V i N (10)
(vi) Capacitor bank reactive power generation limit:
min max
ci ci ci CQ Q Q i N (11)
(vii) Transfer tap setting limit:
min max
k k k Tt t t i N (12)
(viii) Line flow limit:
max
l l lS S l N (13)
The reactive power planning problem is transformed into
voltage stability constrained reactive power planning by
including FVSI in the contingency state as additional
constraint in the problem formulation. Hence from the above
formulation it is found that the VSC-RPP problem is a
combinational non-linear optimization problem. Generator
voltage magnitudes are represented as floating point numbers

International Electrical Engineering Journal (IEEJ)
Vol. 5 (2014) No.10, pp. 1576-1585
ISSN 2078-2365
http://www.ieejournal.com/
Vadivelu and Marutheswar Soft Computing Technique Based Reactive Power Planning using Combining Multi-objective Optimization with Improved Differential Evolution
1578
and the discrete variables appear in the form of transformer
tap setting and reactive power generation of VAR sources.
4. PROPOSED IMPROVED DIFFERENTIAL
EVOLUTION
Differential Evolution is a population-based stochastic search
algorithm that works in the general framework of
evolutionary algorithms. Unlike traditional evolutionary
algorithms, DE variants perturb the generation population
members with the scaled difference between randomly
selected and distinct population members. The optimization
variables are represented as floating point numbers in the DE
population. The proposed IDE based algorithm is shown in
Figure 4.3. It starts to explore the search space by randomly
choosing the initial candidate solutions within the boundary.
Differential evolution creates new off springs by generating a
noisy replica of each individual of the population.
The individual that performs better from the parent vector
(target) and replica (trail vector) advances to the next
generation. This optimization process is carried out with
three basic optimization process are carried out with three
basic operations namely, mutation, crossover and selection.
The proposed work, DE/rand SF/1/bin strategy with
self-tuned parameter is used to solve the VSC-RPP problem.
Here rand denotes randomly selected vector to be perturbed,
1 denotes the number of difference vectors considered for
perturbation and bin stands for binomial type of crossover
operator. This strategy remains the most competitive scheme
based on accuracy and robustness of results. The details of
these operators are given below:
4.1. INITIALIZATION OF PARAMETER VECTORS
DE begins with a randomly initiated population of NP real
parameter vectors known as genomes/chromosome which
forms a candidate solution to multidimensional optimization
problem and is expressed as:
, 1, , 2, , 3, , , ,, , ,.........i G i G i G i G D i GX x x x x
Where G is the generation number and D is the problem’s
dimension. For each parameter of the problem, there will be
minimum and maximum value within which the parameter
should be restricted hence the jth component of ith vector is
initialized as follows:
, , ,min , ,max ,min0,1 .j i o j i j j jx x rand x x (14)
Where , 0,1i jrand is a uniformly distributed random
number lying between 0 and 1
4.2 MUTATION WITH DIFFERENCE VECTORS
After the population is initialized, the mutation operator is in
charge of introducing new parameters into the population.
The mutation operator creates mutant vectors by perturbing a
randomly selected vector 1rx with the difference of two
other randomly selected vectors 2 3r rx and x . All of
these vectors must be different from each other, requiring the
population to be of at least four individuals to satisfy this
condition. To control the perturbation and improve
convergence, the difference vector is scaled by a user defined
constant. The process can be expressed a follows:
, 1, 2, 3,i G r G r G r GV X F X X (15)
Where, F is scaling constant.
In this work, DERANDSF (DE with Random Scale Factor)
is used in which the scaled parameter F is varied in a random
manner in the range (0.4, 1) by using the relation:
0.5 1 0,1F X rand (16)
Where rand (0, 1) is a uniformly distributed random
number within the range [0, 1]. This allows for the stochastic
variations in the amplification of the difference vector and
thus helps retain population diversity as the search
progresses. The difference vector based mutation is believed
to be the strength of DE because of the automatic adaptation
in improving the convergence of the algorithm which comes
from the idea of difference based recombination operator i.e.,
Blend crossover operator (BLX).
The crossover operator creates the trial vectors which are
used in the selection process. A trial vector is a combination
of mutant vector and a parent vector based on different
distributions like uniform distribution, binomial distribution,
exponential distribution is generated in the range (0, 1) and
compared against a user defined constant referred to as the
crossover constant]. In this work, binomial crossover is
performed on each of the D variables. If the value of the
random number is less or equal to the value of the crossover
constant, the parameter will come from the mutant vector,
otherwise the parameter comes from the parent vector.
The crossover operation maintains diversity in the population
preventing local minima convergence. The crossover
constant must be in the range from 0 to 1.If the value of
crossover constant one then the trial vector will be composed
of entirely mutant vector parameters. If the value of crossover
constant is zero then the trial vector will be composed of
entirely parent vector. Trial vector gets at least one parameter
from the mutant vector even if the crossover constant is set to
zero.
The scheme may be outlined as follows:
,
,
,
( ) (0,1)
( )
i j
i j
i j
V G if rand CR or j qU G
X G otherwise
(17)
Where, q is randomly chosen index in the D dimensional
space.
CR is crossover constant

International Electrical Engineering Journal (IEEJ)
Vol. 5 (2014) No.10, pp. 1576-1585
ISSN 2078-2365
http://www.ieejournal.com/
Vadivelu and Marutheswar Soft Computing Technique Based Reactive Power Planning using Combining Multi-objective Optimization with Improved Differential Evolution
1579
, ( )i jX G is parent vector
, ( )i jV G is mutant vector
4.3 Selection
To keep the population size constant over subsequent
generations, the selection process determines which one of
the target vector and trial vector will survive in the next
generation and is outlined as follows:
1 ( ) ( ) ( ) ,i i i iX G U G if f U G f X G
( ) ( ) ( )i i iG if f X G f U GX (18)
Where ( )f X is the objective function to be minimized?
So if the new trial vector yields a better value of the fitness
function, it replaces its target in the next generation;
otherwise the target vector is retained in the population.
This process is continued until the convergence criterion is
satisfied. The termination condition is satisfied when the best
fitness of the population does not change appreciably over
successive iterations.
4.4 PROBLEM REPRESENTATION
Generator bus voltages ,giV transformer tap positions
kt and reactive power generation of VAR sources ciQ
are the optimization variables for the VSC-RPP problem. The
generator bus voltages are represented as floating point
numbers, whereas the transformer tap position and the
reactive power generation of FACT Devices are represented
as integers. The transformer tap setting with tapping ranges
of 10% and a tapping step of 0.025 p.u is represented from
the alphabet (0,1,…….8) and the VAR sources with limits of
1 and 5 p.u and step size of 1 p.u is represented from the
alphabet (0,1……..5). With this representation, a typical
chromosome of the RPP problem will look like the following:
0.981 0.97 ….1.05 4 3 ……..1 -2 +1 …+3
V1 V2 Vn QC1 QC2 QC3 t1 t2 tn
4.5 EVOLUTION FUNCTION
In the reactive power optimization problem under
consideration, the objective is to minimize the objective
function which comprises the total cost of energy loss and
FACTS devices installments of the system satisfying a
number of equality and inequality constraints (6-13). For
each individual, the equality constraints are satisfied by
running the Newton Raphson power flow algorithm [33, 80].
The inequality constraints on the control variables are taken
into account in the problem representation itself, and the
constraints on the state variables are taken into consideration
by adding a quadratic penalty function to the objective
function.With the inclusion of penalty function the new
objective function becomes,
Min
1 1 1
PQ lEN NN
c j j j
j j j
f f SP VP QP LP
(19)
Here, SP, jVP , jQP and jLP are the penalty terms for the
reference bus generator active power limit violation, load bus
voltage limit violation, reactive power generation limit
violation and line flow limit violation respectively. These
quantities are defined by the following equations:
2max max
2min min
0
s s s s s
s s s s s
K P P if P P
SP K P P if P P
otherwise
(20)
2max max
2min min
0
v j j j j
j v j j j j
K V V if V
VP K V V if V
otherwise
V
V
(21)
2max max
2min min
0
q j j j j
j q j j j j
K Q Q if Q
QP K Q Q if Q
otherwise
Q
Q
(22)
2max max
0
l l l l lj
K S S if SLP
otherwise
S
(23)
Where, sK , vK , qK and 1K are the penalty factors. The
success of the penalty function approach lies in the proper
penalty function approach, one has to experiment to find a
correct combination of penalty parameters sK , vK , qK
and. In contingency state, Fast Voltage Stability Index
(FVSI) is included as additional constraint in the evaluation
function and weight age is given to voltage stability rather
than VAR cost and helps to improve the voltage security of
the system. Since IDE maximizes the fitness function, the
minimization objective function f is transformed to a fitness
function to be maximized as,
Fitness k
f
Where, k is a large constant.
International Electrical Engineering Journal (IEEJ)
Vol. 5 (2014) No.10, pp. 1576-1585
ISSN 2078-2365
http://www.ieejournal.com/
Vadivelu and Marutheswar Soft Computing Technique Based Reactive Power Planning using Combining Multi-objective Optimization with Improved Differential Evolution
1580
5. CRITICAL LINES AND BUSES IDENTIFICATION
The Fast Voltage Stability Index (FVSI) is used to identify
the critical lines and buses. The line index in the inter
connected system in which the value that is closed to unity
indicates that the line has reached its instability limit which
could cause sudden voltage drop to the corresponding bus
caused by the reactive load variation. When the line attain
beyond this limit, system bifurcation will be experienced.
The characteristics of the FVSI are same with the existing
techniques proposed by Moghavemmi [11] et al.
5.1. FVSI FORMULATION
The FVSI is derived from the voltage quadratic equation at
the receiving bus on a two-bus system [12]. The general
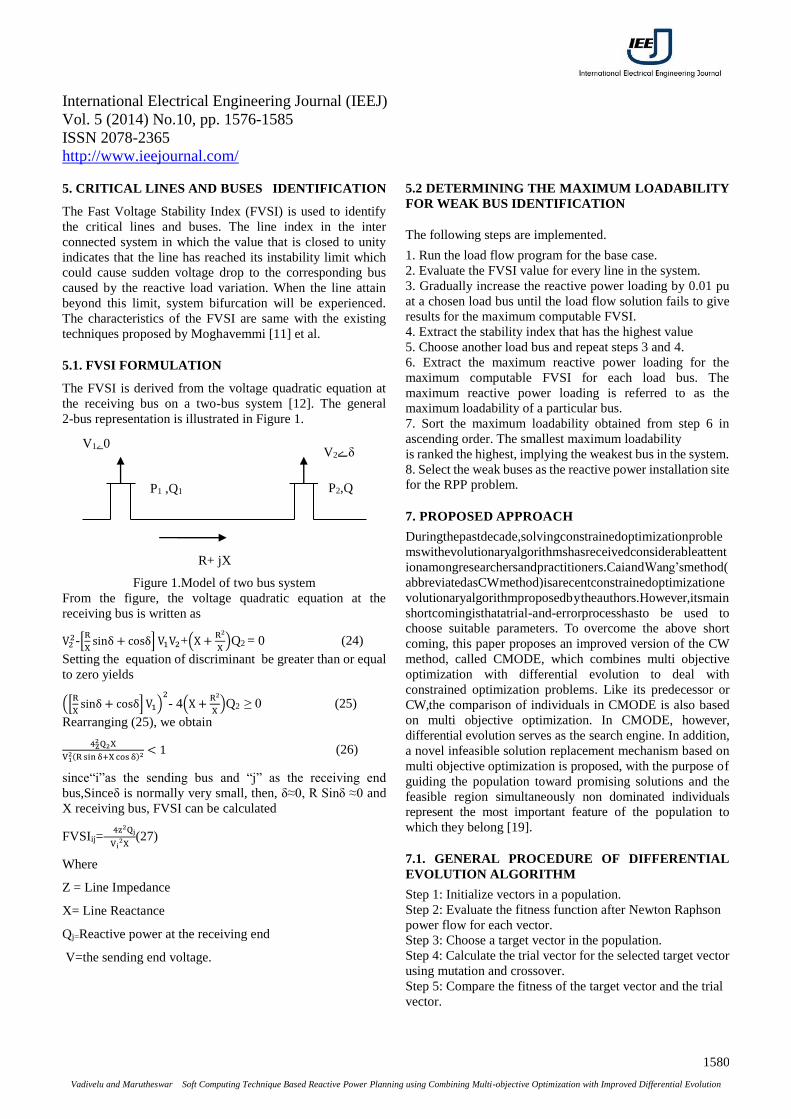
2-bus representation is illustrated in Figure 1.
Figure 1.Model of two bus system
From the figure, the voltage quadratic equation at the
receiving bus is written as
V22-[
R
Xsinδ + cosδ] V1V2+(X +
R2
X)Q2 = 0 (24)
Setting the equation of discriminant be greater than or equal
to zero yields
([R
Xsinδ + cosδ] V1)
2- 4(X +
R2
X)Q2 ≥ 0 (25)
Rearranging (25), we obtain
4Z2Q2X
V12(R sin δ+X cos δ)2 < 1 (26)
since“i”as the sending bus and “j” as the receiving end
bus,Sinceδ is normally very small, then, δ≈0, R Sinδ ≈0 and
X receiving bus, FVSI can be calculated
FVSIij= 4z2Qj
Vi2X
(27)
Where
Z = Line Impedance
X= Line Reactance
Qj=Reactive power at the receiving end
V=the sending end voltage.
5.2 DETERMINING THE MAXIMUM LOADABILITY
FOR WEAK BUS IDENTIFICATION
The following steps are implemented.
1. Run the load flow program for the base case.
2. Evaluate the FVSI value for every line in the system.
3. Gradually increase the reactive power loading by 0.01 pu
at a chosen load bus until the load flow solution fails to give
results for the maximum computable FVSI.
4. Extract the stability index that has the highest value
5. Choose another load bus and repeat steps 3 and 4.
6. Extract the maximum reactive power loading for the
maximum computable FVSI for each load bus. The
maximum reactive power loading is referred to as the
maximum loadability of a particular bus.
7. Sort the maximum loadability obtained from step 6 in
ascending order. The smallest maximum loadability
is ranked the highest, implying the weakest bus in the system.
8. Select the weak buses as the reactive power installation site
for the RPP problem.
7. PROPOSED APPROACH
Duringthepastdecade,solvingconstrainedoptimizationproble
mswithevolutionaryalgorithmshasreceivedconsiderableattent
ionamongresearchersandpractitioners.CaiandWang’smethod(
abbreviatedasCWmethod)isarecentconstrainedoptimizatione
volutionaryalgorithmproposedbytheauthors.However,itsmain
shortcomingisthatatrial-and-errorprocesshasto be used to
choose suitable parameters. To overcome the above short
coming, this paper proposes an improved version of the CW
method, called CMODE, which combines multi objective
optimization with differential evolution to deal with
constrained optimization problems. Like its predecessor or
CW,the comparison of individuals in CMODE is also based
on multi objective optimization. In CMODE, however,
differential evolution serves as the search engine. In addition,
a novel infeasible solution replacement mechanism based on
multi objective optimization is proposed, with the purpose of
guiding the population toward promising solutions and the
feasible region simultaneously non dominated individuals
represent the most important feature of the population to
which they belong [19].
7.1. GENERAL PROCEDURE OF DIFFERENTIAL
EVOLUTION ALGORITHM
Step 1: Initialize vectors in a population.
Step 2: Evaluate the fitness function after Newton Raphson
power flow for each vector.
Step 3: Choose a target vector in the population.
Step 4: Calculate the trial vector for the selected target vector
using mutation and crossover.
Step 5: Compare the fitness of the target vector and the trial
vector.
P1 ,Q1 P2,Q
2222
R+ jX
V10ے V2ےδ
International Electrical Engineering Journal (IEEJ)
Vol. 5 (2014) No.10, pp. 1576-1585
ISSN 2078-2365
http://www.ieejournal.com/
Vadivelu and Marutheswar Soft Computing Technique Based Reactive Power Planning using Combining Multi-objective Optimization with Improved Differential Evolution
1581
Step 6: Select the best fitness vector among them.
Step 7: Repeat step 3 to step 5 till the stopping criteria. The
stopping criterion is number of iterations.
8. RESULT AND DISCUSSION
The proposed combining multi objective IDE based
algorithm has been tested on standard IEEE 30-bus test
system and 72 bus Indian utility systems. In this reactive
power planning problem the optimal solution of the proposed
algorithm can be demonstrated under 100% , 125 % and
150% load in IEEE 30 bus test system,and 72 bus Indian
utility systems.. The real power savings, annual cost savings
and the total costs are calculated as,
PCSave% =
Plossint −Ploss
opt
Plossint x 100 % (28)
WCsave = hdl ( Ploss
int − Plossopt
)
FC= IC + WC
8.1. OPTIMAL REACTIVE POWER PLANNING FOR
IEEE 30 BUS SYSTEM
The IEEE 30 bus system consists of 6 generator-buses, 21
load-buses and 41 branches, of which four branches, (6, 9),
(6, 10), (4, 12) and (28, 27) are under load-tap setting
transformer branches. The buses identified for possible VAR
source installation based on max load buses are 25, 26, 29
and 30 using FVSI method. The optimal parameters used for
simulation of the IDE is the no of decision variables 14,no.of
generations 300,No of population 30,Scaling factor
(0-1),cross over rate (0.4),The parameters ,Limits, Initial
generations and power losses ,optimal VAR source
instalment ,optimal generator bus voltages, optimal
transformer settings are obtained from[6 ] .Three cases have
been studied. Case 1 is of light loads whose loads are the
same as those in [3]. Case 2 and 3 are of heavy loads whose
loads are 1.25% and 1.5% as those of Case 1. The duration of
the load level is 8760 hours in both cases [6].
Initial Power Flow Results
The initial generator bus voltages and transformer taps are set
to 1.0 pu. The loads are given as,
Case 1: Pload= 2.834 and Qload= 1.262
Case 2.Pload= 3.5425 and Qload = 1.5775
Case 3.Pload= 4.251 and Qload = 1.893.
TABLE 1.OPTIMAL GENERATIONS AND POWER LOSSES
Pg Qg Ploss Qloss
Case 1 2.989 1.288 0.159 0.266
Case 2 3.808 1.867 0.266 0.652
Case 3 4.659 2.657 0.417 1.190
TABLE 2.COST COMPARISON
PCsave% WCsave($) fC($)
Case 1 8.644 7,98,070.94 8.4225*106
Case 2 12.452 19,92,758.84 1.4408*107
Case 3 13.311 32,98,528.48
2.2017*107
TABLE 3. OPTIMAL GENERATIONS AND POWER LOSSES FOR CMDE
Pg Qg Ploss Qloss
Case 1 2.823 1.137 0.138 0.193
Case 2 3.712 1.742 0.238 0.526
Case 3 4.531 2.430 0.405 1.048
Table 1,2and 3 gives the optimal generation and power
losses, cost comparison for DE and optimal generation for
CMDE.Table 4 gives the cost comparison. From the
comparison, the CMDE based RPP gives more savings on the
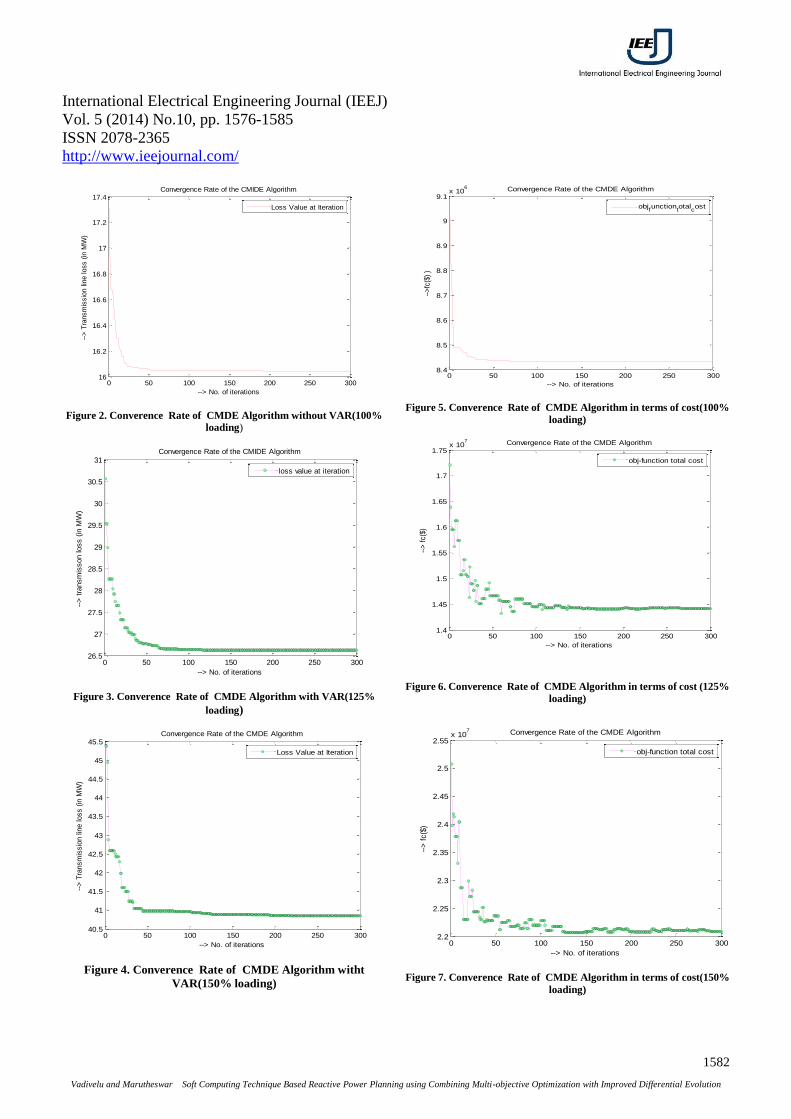
real power for the cases 1, 2 and 3 respectively. Figures 2,
3and 4. Show the Convergence Rate of CMDE with VAR.For
normal, 1.25% and 1.5 % loading. It can be seen that
Convergence Rate of CMDE [14] is able to reach the close
vicinity of final solution with in the respective iteration
Comparing DE. Figure 5, 6 and 7show the convergence rate
of CMDE in terms of cost for 100%, 1.25% and 1.5%
loading.
TABLE 4 COST COMPARISION
Case-1 Case-2 Case-3
DE CMIDE DE CMIDE DE CMIDE
Pg 2.989 2.823
3.808 3.712
4.659 4.531
Qg 1.288
1.137
1.867
1.742
2.657 2.430
Ploss 0.159
0.138
0.266
0.236
0.417 0.401
Qlos
s
0.266 0.193 0.652 0.526 1.190 1.048
PCsav
e%
8.644 8.923 12.452 13.036 13.311 14.078
fC($) 8.42*106 9.0*106 1.4*107 1.7*107 2.2*107 2.5*107
International Electrical Engineering Journal (IEEJ)
Vol. 5 (2014) No.10, pp. 1576-1585
ISSN 2078-2365
http://www.ieejournal.com/
Vadivelu and Marutheswar Soft Computing Technique Based Reactive Power Planning using Combining Multi-objective Optimization with Improved Differential Evolution
1582
Figure 2. Converence Rate of CMDE Algorithm without VAR(100%
loading)
Figure 3. Converence Rate of CMDE Algorithm with VAR(125%
loading)
Figure 4. Converence Rate of CMDE Algorithm witht
VAR(150% loading)
Figure 5. Converence Rate of CMDE Algorithm in terms of cost(100%
loading)
Figure 6. Converence Rate of CMDE Algorithm in terms of cost (125%
loading)
Figure 7. Converence Rate of CMDE Algorithm in terms of cost(150%
loading)
0 50 100 150 200 250 30016
16.2
16.4
16.6
16.8
17
17.2
17.4
--> No. of iterations
-->
Tra
nsm
issio
n lin
e loss (
in M
W)
Convergence Rate of the CMIDE Algorithm
Loss Value at Iteration
0 50 100 150 200 250 30026.5
27
27.5
28
28.5
29
29.5
30
30.5
31
--> No. of iterations
-->
tra
nsm
isson loss (
in M
W)
Convergence Rate of the CMIDE Algorithm
loss value at iteration
0 50 100 150 200 250 30040.5
41
41.5
42
42.5
43
43.5
44
44.5
45
45.5
--> No. of iterations
-->
Tra
nsm
issio
n lin
e loss (
in M
W)
Convergence Rate of the CMDE Algorithm
Loss Value at Iteration
0 50 100 150 200 250 3008.4
8.5
8.6
8.7
8.8
8.9
9
9.1x 10
6
--> No. of iterations
-->
fc($
) )
Convergence Rate of the CMDE Algorithm
objfunction
total
cost
0 50 100 150 200 250 3001.4
1.45
1.5
1.55
1.6
1.65
1.7
1.75x 10
7
--> No. of iterations
-->
fc($
)
Convergence Rate of the CMDE Algorithm
obj-function total cost
0 50 100 150 200 250 3002.2
2.25
2.3
2.35
2.4
2.45
2.5
2.55x 10
7
--> No. of iterations
-->
fc($
)
Convergence Rate of the CMDE Algorithm
obj-function total cost
International Electrical Engineering Journal (IEEJ)
Vol. 5 (2014) No.10, pp. 1576-1585
ISSN 2078-2365
http://www.ieejournal.com/
Vadivelu and Marutheswar Soft Computing Technique Based Reactive Power Planning using Combining Multi-objective Optimization with Improved Differential Evolution
1583
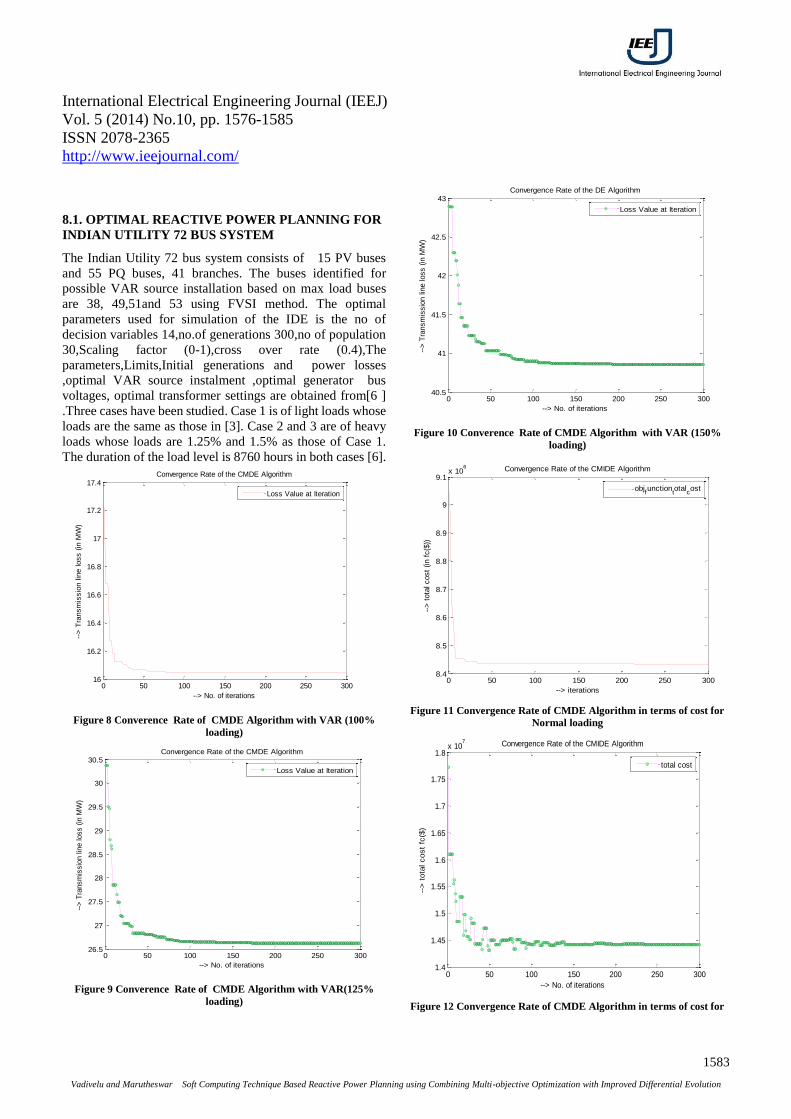
8.1. OPTIMAL REACTIVE POWER PLANNING FOR
INDIAN UTILITY 72 BUS SYSTEM
The Indian Utility 72 bus system consists of 15 PV buses
and 55 PQ buses, 41 branches. The buses identified for
possible VAR source installation based on max load buses
are 38, 49,51and 53 using FVSI method. The optimal
parameters used for simulation of the IDE is the no of
decision variables 14,no.of generations 300,no of population
30,Scaling factor (0-1),cross over rate (0.4),The
parameters,Limits,Initial generations and power losses
,optimal VAR source instalment ,optimal generator bus
voltages, optimal transformer settings are obtained from[6 ]
.Three cases have been studied. Case 1 is of light loads whose
loads are the same as those in [3]. Case 2 and 3 are of heavy
loads whose loads are 1.25% and 1.5% as those of Case 1.
The duration of the load level is 8760 hours in both cases [6].
Figure 8 Converence Rate of CMDE Algorithm with VAR (100%
loading)
Figure 9 Converence Rate of CMDE Algorithm with VAR(125%
loading)
Figure 10 Converence Rate of CMDE Algorithm with VAR (150%
loading)
Figure 11 Convergence Rate of CMDE Algorithm in terms of cost for
Normal loading
Figure 12 Convergence Rate of CMDE Algorithm in terms of cost for
0 50 100 150 200 250 30016
16.2
16.4
16.6
16.8
17
17.2
17.4
--> No. of iterations
-->
Tra
nsm
issio
n lin
e loss (
in M
W)
Convergence Rate of the CMDE Algorithm
Loss Value at Iteration
0 50 100 150 200 250 30026.5
27
27.5
28
28.5
29
29.5
30
30.5
--> No. of iterations
-->
Tra
nsm
issio
n lin
e loss (
in M
W)
Convergence Rate of the CMDE Algorithm
Loss Value at Iteration
0 50 100 150 200 250 30040.5
41
41.5
42
42.5
43
--> No. of iterations
-->
Tra
nsm
issio
n lin
e loss (
in M
W)
Convergence Rate of the DE Algorithm
Loss Value at Iteration
0 50 100 150 200 250 3008.4
8.5
8.6
8.7
8.8
8.9
9
9.1x 10
6
--> iterations
-->
tota
l cost
(in f
c($
))
Convergence Rate of the CMIDE Algorithm
objfunction
total
cost
0 50 100 150 200 250 3001.4
1.45
1.5
1.55
1.6
1.65
1.7
1.75
1.8x 10
7
--> No. of iterations
-->
tota
l cost
fc($
)
Convergence Rate of the CMIDE Algorithm
total cost
International Electrical Engineering Journal (IEEJ)
Vol. 5 (2014) No.10, pp. 1576-1585
ISSN 2078-2365
http://www.ieejournal.com/
Vadivelu and Marutheswar Soft Computing Technique Based Reactive Power Planning using Combining Multi-objective Optimization with Improved Differential Evolution
1584
125% loading
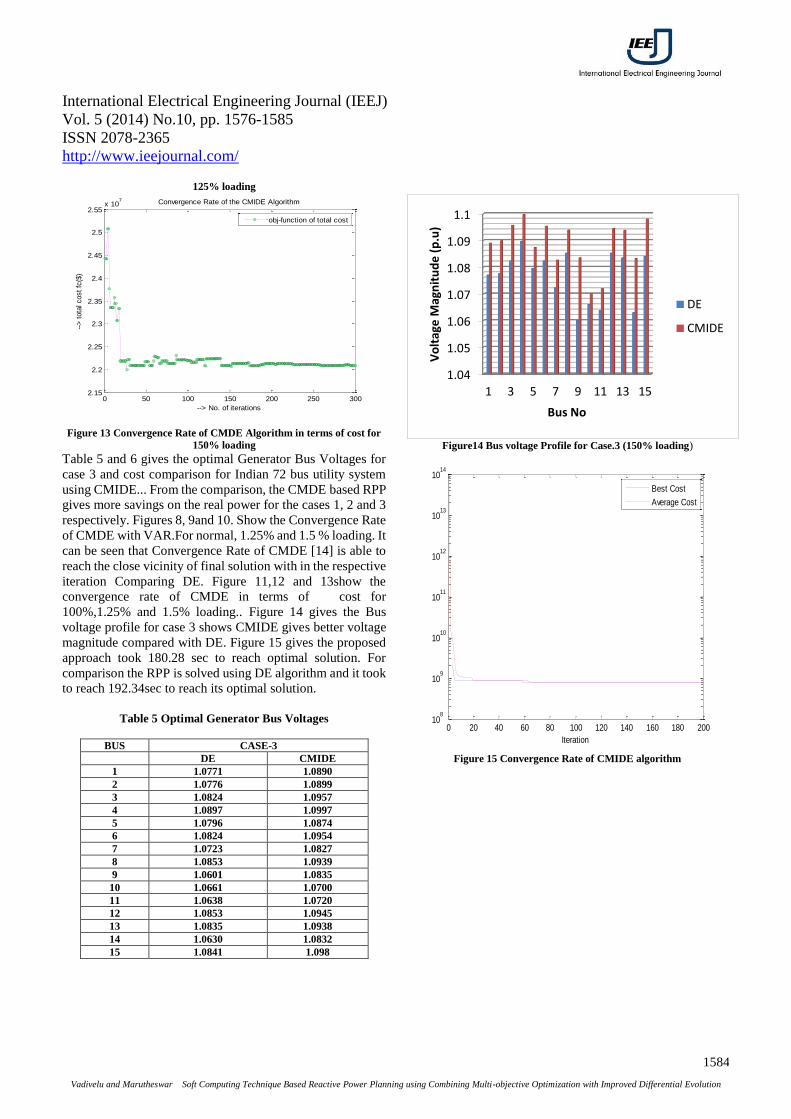
Figure 13 Convergence Rate of CMDE Algorithm in terms of cost for
150% loading
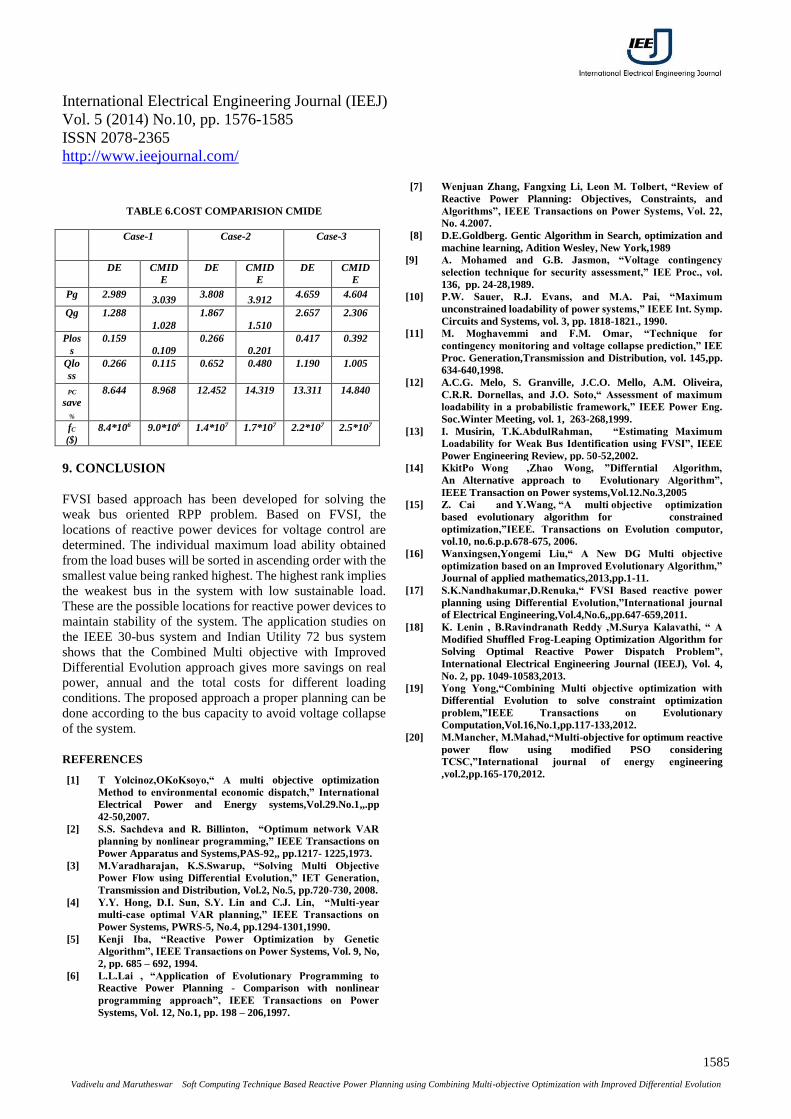
Table 5 and 6 gives the optimal Generator Bus Voltages for
case 3 and cost comparison for Indian 72 bus utility system
using CMIDE... From the comparison, the CMDE based RPP
gives more savings on the real power for the cases 1, 2 and 3
respectively. Figures 8, 9and 10. Show the Convergence Rate
of CMDE with VAR.For normal, 1.25% and 1.5 % loading. It
can be seen that Convergence Rate of CMDE [14] is able to
reach the close vicinity of final solution with in the respective
iteration Comparing DE. Figure 11,12 and 13show the
convergence rate of CMDE in terms of cost for
100%,1.25% and 1.5% loading.. Figure 14 gives the Bus
voltage profile for case 3 shows CMIDE gives better voltage
magnitude compared with DE. Figure 15 gives the proposed
approach took 180.28 sec to reach optimal solution. For
comparison the RPP is solved using DE algorithm and it took
to reach 192.34sec to reach its optimal solution.
Table 5 Optimal Generator Bus Voltages
BUS CASE-3
DE CMIDE
1 1.0771 1.0890
2 1.0776 1.0899
3 1.0824 1.0957
4 1.0897 1.0997
5 1.0796 1.0874
6 1.0824 1.0954
7 1.0723 1.0827
8 1.0853 1.0939
9 1.0601 1.0835
10 1.0661 1.0700
11 1.0638 1.0720
12 1.0853 1.0945
13 1.0835 1.0938
14 1.0630 1.0832
15 1.0841 1.098
Figure14 Bus voltage Profile for Case.3 (150% loading)
Figure 15 Convergence Rate of CMIDE algorithm
0 50 100 150 200 250 3002.15
2.2
2.25
2.3
2.35
2.4
2.45
2.5
2.55x 10
7
--> No. of iterations
-->
tota
l cost
fc($
)
Convergence Rate of the CMIDE Algorithm
obj-function of total cost
1.04
1.05
1.06
1.07
1.08
1.09
1.1
1 3 5 7 9 11 13 15
Vo
ltag
e M
agn
itu
de
(p
.u)
Bus No
DE
CMIDE
0 20 40 60 80 100 120 140 160 180 20010
8
109
1010
1011
1012
1013
1014
Iteration
Best Cost
Average Cost
International Electrical Engineering Journal (IEEJ)
Vol. 5 (2014) No.10, pp. 1576-1585
ISSN 2078-2365
http://www.ieejournal.com/
Vadivelu and Marutheswar Soft Computing Technique Based Reactive Power Planning using Combining Multi-objective Optimization with Improved Differential Evolution
1585
TABLE 6.COST COMPARISION CMIDE
Case-1 Case-2 Case-3
DE CMID
E
DE CMID
E
DE CMID
E
Pg 2.989 3.039
3.808 3.912
4.659 4.604
Qg 1.288
1.028
1.867
1.510
2.657 2.306
Plos
s
0.159
0.109
0.266
0.201
0.417 0.392
Qlo
ss
0.266 0.115 0.652 0.480 1.190 1.005
PC
save
%
8.644 8.968 12.452 14.319 13.311 14.840
fC
($)
8.4*106 9.0*106 1.4*107 1.7*107 2.2*107 2.5*107
9. CONCLUSION
FVSI based approach has been developed for solving the
weak bus oriented RPP problem. Based on FVSI, the
locations of reactive power devices for voltage control are
determined. The individual maximum load ability obtained
from the load buses will be sorted in ascending order with the
smallest value being ranked highest. The highest rank implies
the weakest bus in the system with low sustainable load.
These are the possible locations for reactive power devices to
maintain stability of the system. The application studies on
the IEEE 30-bus system and Indian Utility 72 bus system
shows that the Combined Multi objective with Improved
Differential Evolution approach gives more savings on real
power, annual and the total costs for different loading
conditions. The proposed approach a proper planning can be
done according to the bus capacity to avoid voltage collapse
of the system.
REFERENCES
[1] T Yolcinoz,OKoKsoyo,“ A multi objective optimization
Method to environmental economic dispatch,” International
Electrical Power and Energy systems,Vol.29.No.1,,.pp
42-50,2007.
[2] S.S. Sachdeva and R. Billinton, “Optimum network VAR
planning by nonlinear programming,” IEEE Transactions on
Power Apparatus and Systems,PAS-92,, pp.1217- 1225,1973.
[3] M.Varadharajan, K.S.Swarup, “Solving Multi Objective
Power Flow using Differential Evolution,” IET Generation,
Transmission and Distribution, Vol.2, No.5, pp.720-730, 2008.
[4] Y.Y. Hong, D.I. Sun, S.Y. Lin and C.J. Lin, “Multi-year
multi-case optimal VAR planning,” IEEE Transactions on
Power Systems, PWRS-5, No.4, pp.1294-1301,1990.
[5] Kenji Iba, “Reactive Power Optimization by Genetic
Algorithm”, IEEE Transactions on Power Systems, Vol. 9, No,
2, pp. 685 – 692, 1994.
[6] L.L.Lai , “Application of Evolutionary Programming to
Reactive Power Planning - Comparison with nonlinear
programming approach”, IEEE Transactions on Power
Systems, Vol. 12, No.1, pp. 198 – 206,1997.
[7] Wenjuan Zhang, Fangxing Li, Leon M. Tolbert, “Review of
Reactive Power Planning: Objectives, Constraints, and
Algorithms”, IEEE Transactions on Power Systems, Vol. 22,
No. 4.2007.
[8] D.E.Goldberg. Gentic Algorithm in Search, optimization and
machine learning, Adition Wesley, New York,1989
[9] A. Mohamed and G.B. Jasmon, “Voltage contingency
selection technique for security assessment,” IEE Proc., vol.
136, pp. 24-28,1989.
[10] P.W. Sauer, R.J. Evans, and M.A. Pai, “Maximum
unconstrained loadability of power systems,” IEEE Int. Symp.
Circuits and Systems, vol. 3, pp. 1818-1821., 1990.
[11] M. Moghavemmi and F.M. Omar, “Technique for
contingency monitoring and voltage collapse prediction,” IEE
Proc. Generation,Transmission and Distribution, vol. 145,pp.
634-640,1998.
[12] A.C.G. Melo, S. Granville, J.C.O. Mello, A.M. Oliveira,
C.R.R. Dornellas, and J.O. Soto,“ Assessment of maximum
loadability in a probabilistic framework,” IEEE Power Eng.
Soc.Winter Meeting, vol. 1, 263-268,1999.
[13] I. Musirin, T.K.AbdulRahman, “Estimating Maximum
Loadability for Weak Bus Identification using FVSI”, IEEE
Power Engineering Review, pp. 50-52,2002.
[14] KkitPo Wong ,Zhao Wong, ”Differntial Algorithm,
An Alternative approach to Evolutionary Algorithm”,
IEEE Transaction on Power systems,Vol.12.No.3,2005
[15] Z. Cai and Y.Wang, “A multi objective optimization
based evolutionary algorithm for constrained
optimization,”IEEE. Transactions on Evolution computor,
vol.10, no.6.p.p.678-675, 2006.
[16] Wanxingsen,Yongemi Liu,“ A New DG Multi objective
optimization based on an Improved Evolutionary Algorithm,”
Journal of applied mathematics,2013,pp.1-11.
[17] S.K.Nandhakumar,D.Renuka,“ FVSI Based reactive power
planning using Differential Evolution,”International journal
of Electrical Engineering,Vol.4,No.6,,pp.647-659,2011.
[18] K. Lenin , B.Ravindranath Reddy ,M.Surya Kalavathi, “ A
Modified Shuffled Frog-Leaping Optimization Algorithm for
Solving Optimal Reactive Power Dispatch Problem”,
International Electrical Engineering Journal (IEEJ), Vol. 4,
No. 2, pp. 1049-10583,2013.
[19] Yong Yong,“Combining Multi objective optimization with
Differential Evolution to solve constraint optimization
problem,”IEEE Transactions on Evolutionary
Computation,Vol.16,No.1,pp.117-133,2012.
[20] M.Mancher, M.Mahad,“Multi-objective for optimum reactive
power flow using modified PSO considering
TCSC,”International journal of energy engineering
,vol.2,pp.165-170,2012.