
Slipping detection and avoidance based on Kalman filter
40
Slipping detection and avoidance based on Kalman filter Alberto Cavallo, Giuseppe De Maria, Ciro Natale * , Salvatore Pirozzi Dipartimento di Ingegneria Industriale e dell’Informazione, Seconda Universit` a degli Studi di Napoli, 81031 Aversa, Italy Abstract The purpose of this paper is to present the latest slipping detection and avoid- ance algorithms developed by the authors for application in robotic manipu- lation tasks. Slipping can happen not only in quasi-static conditions such as in grasping tasks but also during dynamic manipulation, therefore the avail- ability of slip control techniques effective in both conditions, such as those proposed here, are essential in real robotic applications. A new algorithm is also proposed to estimate on-line the actual friction coefficient at the contact with the manipulated object by means of a preliminary exploration phase, thus enabling safe manipulation of objects with unknown surface properties. A detailed dynamic simulator is presented and experimentally validated on a mechatronic test bench used for proving the effectiveness of the proposed approach. Keywords: Robotic manipulation, Slipping detection, Slipping avoidance, Friction coefficient estimation. 1. Introduction Many studies proved that manipulation ability is enabled by tactile and force sensing, especially the ability to sense the contact condition between * Corresponding author Email address: [email protected] (Ciro Natale) Preprint submitted to Mechatronics May 12, 2014
Transcript of Slipping detection and avoidance based on Kalman filter

Slipping detection and avoidance based on Kalman filter
Alberto Cavallo, Giuseppe De Maria, Ciro Natale∗, Salvatore Pirozzi
Dipartimento di Ingegneria Industriale e dell’Informazione,
Seconda Universita degli Studi di Napoli, 81031 Aversa, Italy
Abstract
The purpose of this paper is to present the latest slipping detection and avoid-
ance algorithms developed by the authors for application in robotic manipu-
lation tasks. Slipping can happen not only in quasi-static conditions such as
in grasping tasks but also during dynamic manipulation, therefore the avail-
ability of slip control techniques effective in both conditions, such as those
proposed here, are essential in real robotic applications. A new algorithm is
also proposed to estimate on-line the actual friction coefficient at the contact
with the manipulated object by means of a preliminary exploration phase,
thus enabling safe manipulation of objects with unknown surface properties.
A detailed dynamic simulator is presented and experimentally validated on
a mechatronic test bench used for proving the effectiveness of the proposed
approach.
Keywords: Robotic manipulation, Slipping detection, Slipping avoidance,
Friction coefficient estimation.
1. Introduction
Many studies proved that manipulation ability is enabled by tactile and
force sensing, especially the ability to sense the contact condition between
∗Corresponding authorEmail address: [email protected] (Ciro Natale)
Preprint submitted to Mechatronics May 12, 2014

the object and the fingers [1]. A neurophysiological study on human manip-
ulation [2] demonstrated that humans are able to keep objects under load
perturbations in the direction tangential to the contact surface by adjusting
fingertip force vectors so that the force in the direction normal to the contact
surface (the so-called grip force) is high enough in relation to the tangential
component to prevent slippage, but, at the same time, avoiding deformation
of the object. Contact forces and torques vectors at the fingertips, con-
tact point/area locations, orientation of the contact surface, shape and force
distribution of the contact area, friction coefficient are the physical quanti-
ties and parameters that play a key role in this kind of tasks. Among them,
knowledge of the friction coefficient is particularly relevant for a safe grasping
and manipulation [3, 4]. Various solutions for estimation of this parameter
exist in the literature but most of them rely on ad-hoc sensors [5, 6]. All these
algorithms are mainly based on the Coulomb friction law, which is the most
celebrated model exploited for robotic manipulation. However, such model
does not take into account some phenomena taking place during the contact
between two surfaces. Therefore, many more sophisticated friction models,
such as [7, 8, 9], have been proposed and used in motion control systems
for friction compensation [10] and in robotics [11] for object detection and
recognition, or for dynamic modeling of grasping [12]. Among such friction
models, the LuGre model has been selected for reproducing as accurately
as possible in a dynamic simulator the experimentally observed phenomena,
and it will be exploited to tune the control algorithm parameters.
Slip detection plays a central role not only in ensuring a stable grasp by
adjusting the grip force, but also in manipulation and tactile exploration, as
during the slippage, contact forces or more generic tactile sensory data can
provide information about the object properties such as roughness, compli-
2

ance and shape. A recent survey on slipping detection methods is [13], where
a taxonomy of slip sensors is proposed comprising four categories based on
the detected physical quantity associated to slip: displacement, force, heat,
micro-vibration. The slip control proposed in the present paper belongs to
the force sensor category. Nevertheless, the authors of the survey believe that
research efforts are still needed not only in terms of hardware development
but also in terms of efficient computational methods. Many recent papers,
e.g. [14, 15, 16, 17, 18], dealing with slip control demonstrate that research
effort is still needed in terms of both hardware progress and algorithmic
advancements.
If slip detection is certainly a feature of primary importance, slipping
avoidance is definitely the final objective during grasping and manipulation
of an object. Therefore, availability of good detection algorithms is useless
without an effective slip avoidance technique. Methods for slip control can
basically be divided into two categories, techniques that exploit contact force
measurements and techniques that exploit the geometric characteristics of
the contact area. A recent work belonging to the first category is [19], where
a sliding mode control strategy is adopted to control the grip force on the
basis of a binary slip detection signal obtained through an array of linear
filters of the measured shear force. Similarly to other approaches of the same
category, whose references can be found in the cited paper, the grip force
is always increased on the basis of the slip event detection. Even though
these approaches are suitable for grasping tasks and for slip avoidance in
case of unknown or changing friction coefficient, they could not be effective
during manipulation tasks where dynamic interaction forces dominate. In
such cases, the grip force should be adjusted depending on the dynamic
loading conditions and thus the slip control action should be able to increase
3

and also decrease the grip force.
An example of work belonging to the second category and still focusing on
grasping tasks is [20], where a vision-based slip margin feedback is proposed
for slip control. Similarly to other approaches that exploit contact surface
information, complex sensing equipments are needed to obtain a distributed
measurement, simple force sensors are not enough.
This paper extends previous work of the authors on slipping control that
initiated in [17], where the force/tactile sensor developed in [21] was exploited
to estimate the friction coefficient using an off-line technique; then such pa-
rameter was used to setup an elementary slip control algorithm assuming to
work in quasi-static conditions. The same sensor was then used in [15] within
a slip control loop that exploited the residual of an Extended Kalman Filter
(EKF). However, the EKF was not purposefully designed for the slip control
law, but it was mainly devoted to estimate position and orientation of the
object in contact with the hemispherical soft finger tip. In the recent pa-
per [16], the same EKF was exploited to setup a slipping detection technique
and to calculate the orientation of the object in contact with the soft tactile
sensor in the 3D case, so as to allow a correct estimation of the normal and
tangential components of the contact force and thus of the friction coefficient.
With respect to this previous work, the novel contributions of the present
paper mainly consist in a new slipping detection algorithm based on a sim-
ple linear Kalman filter (KF), though it assumes that tangential and normal
components of the contact force are already available, e.g. through the EKF
cited above, that is mandatory for in-hand manipulation. The second con-
tribution is a technique to estimate the friction coefficient by exploiting the
slipping detection algorithm. This technique is applied during a preliminary
exploration phase of the object to manipulate and it can estimate the actual
4

friction coefficient of the contact surface, which depends on environmental
conditions such as humidity, temperature and cleanliness. The third contri-
bution is a slip control law that exploits the KF residual and the estimated
friction coefficient to compute a grip force adjustment. The control strategy
can work not only in static conditions but also when dynamic interaction
forces dominate.
The paper is organized as follows. Section 2 is focused on the dynamic
modelling of the contact between an object and a compliant sensor pad
mounted on a force sensor able to measure both normal and tangential com-
ponents of the contact force. Contact friction is modelled according to the
LuGre dynamic model, which is briefly reviewed and then implemented in
the simulator. Section 3 presents the design of the KF based on the dynamic
model of the previous section, and whose residual is exploited to detect the
slippage and as input to the slipping control algorithm presented later in
Section 5. The filter equations reveal that its residual contains the effects
of forces not balanced by the static friction, including inertial forces, hence
the idea is to exploit the residual as a tool for slip detection and avoidance.
The experimental setup used to carry out the experiments is described in
Section 4, where the model dynamic parameters are tuned so as to have a
good accordance between the simulation and the experimental results. The
experimental validation of the slipping detection method is then presented.
The slipping avoidance algorithm is designed in Section 5 on the basis of the
dynamic model and the developed simulator. The haptic exploration proce-
dure for friction coefficient estimation is also presented in this section as a
method to provide this parameter needed by the slip controller. Both simula-
tion and experimental results, that confirm the effectiveness of the proposed
approach, are presented.
5

xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxx
xxxxx
xxxxxxxxx
xxxxx
xxxxxx
xxxxxxx
xxxxxx
xxxxxxxxxxx
xxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
m
Mft
fn
kβ
friction force g(x, fn)
x1
x3sensor pad
object
sliding surface
Figure 1: Sketch of the contact model: tangential dynamics.
2. Modelling
The dynamics of the contact between the sensor and the object is mod-
elled taking into account the inertia of both the sensor pad (assumed de-
formable) and the object as well as the friction force at the contact surface.
The aim of the analysis carried out in this section is to describe the dynamics
of the object slippage when both normal and tangential forces are applied to
it, therefore it is sufficient to write the equations of motion only along the
tangential component of the external force, call it ft.
With reference to Fig. 1, let m be the mass of the moving part of the
force sensor (the sensor pad), k its stiffness, β the damping coefficient of the
material andM the mass of the manipulated object. The friction force acting
between the two contact surfaces will be modelled by resorting to the LuGre
model, which is able to describe the complex phenomena that happen during
a friction contact and it is indicated as g(x, fn), where fn is the normal load
and x = ( x1 x2 x3 x4 x5 )T is the state vector of the dynamic model,
defined as follows: x1 and x3 are the displacements of the sensor pad and of
the object, respectively, x2 = x1 and x4 = x3 are their velocities, thus x2−x4
is the relative speed between object and sensor pad. x5 is the state of the
6

dynamic friction model whose meaning will be detailed below.
The equations of motion can be easily written in the form
mx2 + kx1 + βx2 + g(x, fn) = 0 (1)
Mx4 − g(x, fn) = ft (2)
x5 = n(x, fn) (3)
where the expressions of the friction force g(x, fn) and of the nonlinear func-
tion n(x, fn) depend on the specific friction model that one intends to adopt.
In the case of the LuGre friction model [9], they are defined by the following
equations
g(x, fn) = σ0x5 + (σ1 + σ2)(x2 − x4)− σ0σ1|x2 − x4|
s(x, fn)x5 (4)
n(x, fn) = x2 − x4 − σ0|x2 − x4|
s(x, fn)x5, with (5)
s(x, fn) = µdfn + fn(µs − µd)e−(
x2−x4v0
)2
, (6)
where µd ≤ µs is the kinetic friction coefficient, σ0 is the asperity stiffness, σ1
is the micro-viscous friction coefficient, σ2 is the viscous friction coefficient
and v0 is the threshold velocity for the activation of the Stribeck effect. The
meaning of the state variable x5 is the average micro-displacement of the
contact surface asperities.
It can be shown that for fn → ∞ the system becomes linear. In this
case, for every constant value of ft, no relative motion between the object
and the sensor can occur since the relative speed between object and sensor
pad x2 − x4 → 0, because the static gain of the system with ft as input
and x2 − x4 as output is zero. For a time-varying ft, the relative speed is
practically zero since only micro-displacements are allowed (the higher σ0,
the lower the relative speed is). It is well-known that, for finite values of fn,
7

the same happens until ft is below the so-called ‘break-away force’, which,
for a constant ft, is the stiction force µsfn. However, if the rate of the applied
force ft increases, the break-away force decreases, and this phenomenon is
also captured by the LuGre model. It is also well-known, see e.g. [9, 22],
that the break-away force reaches a minimum asymptotic value as the rate
of the applied tangential load increases. This means that, even in dynamic
conditions, there always exists a normal load high enough to keep the relative
velocity to zero.
For the design of the slipping detection strategy presented in the following
section, it is convenient to express the equations of motions in the state space
form
x1(t) = x2(t) (7)
x2(t) = −k
mx1(t)−
β
mx2(t)−
1
mg(x, fn) (8)
x3(t) = x4(t) (9)
x4(t) =1
Mft +
1
Mg(x, fn) (10)
x5(t) = n(x, fn) (11)
The slipping detection technique, proposed in Section 3, is based on the
solution of the state estimation problem for such contact model. Whereas,
the slipping avoidance control algorithm, proposed in Section 5, will exploit
the normal load fn as control input to act on this system to avoid slippage,
i.e., keeping the relative velocity x2 − x4 practically zero with a limited fn.
3. Slipping detection algorithm
The slipping detection algorithm proposed in this paper is based on a state
observer designed for the contact model presented in the previous section.
The state space equations (7)-(11) along with the output equation, which
8

models the elastic force kx1 measured by the sensor, can be written in the
form
x(t) = Fx(t) +w(t) (12)
y(t) = hTx(t) + v(t) (13)
where v(t) denotes the measurement noise and the matrices F , h are defined
as
F =
0 1 0 0 0
0 0 0 0 0
0 0 0 1 0
0 0 0 0 0
0 0 0 0 0
, h =
k
0
0
0
0
, (14)
and the vector w is
w(t) =
0
−k
mx1 −
β
mx2 −
1
mg(x, fn)
01
Mft +
1
Mg(x, fn)
n(x, fn)
. (15)
Note that the linear terms in x1 and x2 have been included in the dis-
turbance in order not to have the dynamic matrix F be dependent on the
knowledge of the dynamic parameters β and m, which are not easy to esti-
mate accurately.
Observing that, under quasi-static conditions, if no macro-slippage oc-
curs between the object and the sensor, i.e., if the relative velocity x2 − x4
is practically zero, then the nonlinear function n(x, fn) = 0, the friction
force g(x, fn) practically balances the external tangential force ft and the
elastic reaction of the sensor, namely g(x, fn) = −ft = −kx1. Under such
9

assumptions it is w = 0. On the other hand, as soon as there is a slipping
event, i.e., a pre-sliding regime builds up, the force balance above no longer
holds and the vector w 6= 0 acts as a disturbance on the linear system with
dynamic matrix F . Therefore, by designing a suitable state observer assum-
ing that the system dynamics is purely linear (w = 0), it is expected that
as soon as the disturbance vector becomes non null, the estimation error of
the observer increases, thus revealing a pre-sliding condition. By inspect-
ing equations (12)-(13), it is straightforward to notice that the system with
w = 0 is already in the Kalman canonical form and that it is not completely
observable with an observable dynamics described by the equations
z(t) = F oz(t) (16)
y(t) = hTo z(t) (17)
where z = ( x1 x2 )T and the matrices F o and ho are
F o =
0 1
0 0
, ho =
k
0
.
Note that the states x3, x4 and x5 are not observable from y, and for this
reason will no longer be used in the sequel. The first step of the detection
algorithm is the design of a state estimator and this will be done by resorting
to the discrete-time KF, by firstly writing the discrete-time version of the
dynamic system (16)-(17) using the Euler method. Denote with h ∈ Z the
discrete-time variable related to the continuous time by th = hT , being T the
sampling time and with zh = z(th), yh = y(th), vh = v(th) all the variables
sampled at the hth time instant. The equations of the system whose state
has to be estimated are
zh+1 = F ozh +wh (18)
yh = hTo zh + vh (19)
10

where, with a slight abuse of notation, the dynamic matrix and the distur-
bance wh = w(th) are
F o =
1 T
0 1
, wh =
0
−k
mz1h −
β
mz2h −
1
mg(x, fn)
(20)
and the measurement noise vh is assumed a Gaussian white process with
covariance V > 0, uncorrelated with hTo zh. If also the state disturbance wh
were a Gaussian white noise uncorrelated with zh with covariance matrix
W ≥ 0 (and this is the case if no slip occurs because wh = 0), then the mean
of the state estimation error of a standard linear KF for the system (18)-(19)
would be zero. Whereas, it is expected that the error starts increasing as
soon as wh 6= 0, i.e., when a slip occurs, since it actually is strictly correlated
with the system state. In fact, it is a function of the state itself, and thus its
presence is able to bias the state estimate. This is the idea at the basis of
the slipping detection algorithm, which simply monitors the residual of the
following KF
zh+1|h = F ozh|h (21)
P h+1|h = F oP h|hFTo +W (22)
Kh = P h+1|hhTo
(
hTo P h+1|hho + V
)−1
(23)
yh+1|h = hTo zh+1|h (24)
eh+1 = yh+1 − yh+1|h (25)
zh+1|h+1 = zh+1|h +Kheh+1 (26)
P h+1|h+1 = (I −KhhTo )P h+1|h (27)
yh+1|h+1 = hTo zh+1|h+1 (28)
with initial conditions z0|0 = 0, P 0|0 = W , where zh|h and P h|h denote the
estimate of the mean and covariance of the system state at the hth time
11

instant given the observations up to h. The error eh is expected to increase
as soon as the disturbance w 6= 0. This can happen not only if the applied
external tangential force ft is larger than the break-away force thus causing
slippage, but also if large inertial forces, that sum up with ft, build up in
dynamic conditions and cause the slippage as well. Furthermore, as it is
experimentally demonstrated in many works in the literature [14, 23, 24] and
in the next section, the system during a slipping motion exhibits a behaviour,
that is very difficult to reproduce with a dynamic model, which consists of
a high-frequency dynamics superimposed to the external tangential force.
This means that an additional disturbance component affects the measured
signal, thus causing an increase of the filter residual.
However, it is also clear that it is not possible to distinguish between an
increase of the filter residual caused by a sliding under quasi-static conditions
and an increase due to dynamic interaction. Nevertheless, the filter residual
will be exploited for two purposes. As discussed in Section 4.2, its magnitude
will be compared to a threshold to detect the slippage in quasi-static con-
ditions and a suitable detection signal will be generated and used as input
of a friction coefficient estimation algorithm that is assumed to work in a
preliminary haptic exploration phase of the object to manipulate. The de-
tails on the exploration phase will be presented in Section 5.2. Of course the
threshold value depends on the measurement noise power, in fact it cannot
be chosen too low in case of large measurement noise, which could cause false
slipping alarms. Details on the threshold selection will be presented in the
next section. Second, the filter residual itself will be utilized as input of a
slipping control algorithm that dynamically adjusts the grip force during the
manipulation to prevent object slippage. Another interesting feature of the
algorithm is that it does not require knowledge of any dynamic parameter of
12

force sensor
sensor pad
vertical voice coil
horizontalvoice coil
position sensor
contact surface
Figure 2: The experimental setup.
the model, except for the sensor pad stiffness, since they are all included in
the disturbance. The only parameter to be known is the noise covariance V ,
that is very easy to estimate with simple experimental tests on the available
sensor.
4. Experimental setup and validation
The experimental setup used in this paper to validate the slipping detec-
tion and avoidance algorithms is depicted in Fig. 2. It comprises a 6-axis
force/torque sensor, the model used is the FTD-Nano-17 manufactured by
ATI, with a measurement range equal to ±12N and ±17N for tangential
and normal force components, respectively, while the measurement range for
all torque components is equal to ±120Nmm. A cylindrical silicone pad
with a 3mm height has been attached to the top of the sensor so as to get
in contact with the surface the object. Silicone has been selected since it
is often used as contact surface in tactile sensors for its mechanical charac-
13

teristics, see e.g. [25, 26]. The selected contact surface is made of Teflonr
to have a very low friction coefficient, but the friction coefficient has been
estimated for other materials as well and the results confirm the findings of
past papers [15, 16]. This low friction coefficient has been selected as the
worst case for the slipping avoidance algorithm that will be presented in this
work, in fact with a low friction coefficient tangential forces are very low and
thus any method that elaborates such quantities has to demonstrate to be
robust enough to be effective. To let the object slide on the sensor pad, it
has been fixed to a horizontal voice coil, thus the tangential component of
the contact force can be easily controlled by acting on the electrical current
flowing into the coil. To regulate the normal force, a second voice coil is
placed vertically beneath the force sensor. Measuring the relative position
between the deformable sensor pad and the object is certainly a challenge
and a minimally invasive solution was adopted here. A simple non-contact
displacement sensor, based on discrete optoelectronic components, was pur-
posefully constructed and calibrated using an accurate but cumbersome laser
rangefinder. Unfortunately, due to the deformability of the sensor pad, the
sensor measures not only the relative displacement between the object and
the sensor pad surface, but it is sensitive also to the deformation of the sensor
pad itself. Nevertheless, the experiments described in the rest of the paper
have been performed in such a way that the relative displacement is much
higher than the deformation of the sensor pad. Therefore, the sensor signal
is actually representative of the relative displacement, even though not in an
accurate way, but the aim of this measurement is to detect slipping events
rather than accurately quantifying the relative displacement. All the devices
are connected to a dSPACE system DS1005, which runs the KF and all other
algorithms with a sampling time T = 1ms.
14

Table 1: Experimentally tuned dynamic parameters of the contact model.
Name Meaning Value
m sensor pad mass 0.01 kg
M object mass 0.1 kg
k sensor pad stiffness 4·103N/m
β sensor pad damping coefficient 10.12Ns/m
µs static friction coefficient 0.3
µd kinetic friction coefficient 0.2
σ0 asperity stiffness 1.3·104N/m
σ1 micro-viscous friction coefficient 2Ns/m
σ2 viscous friction coefficient 286Ns/m
v0 threshold velocity of Stribeck effect 10−3m/s
4.1. Validation of the dynamic simulator
A number of experiments have been carried out on this experimental setup
to firstly estimate the parameters of the model presented in Section 2 and
implemented in MATLAB/Simulink. The estimated dynamic parameters
are reported in Tab. 1. A first experiment has been performed by applying a
constant normal force of about 1N and a sinusoidal tangential force at 0.25Hz
with an amplitude large enough to cause a periodic stick-slip motion. The
same input forces are applied also in simulation and the results are reported
in Fig. 3, which shows a good accordance between measured and modelled
quantities. In particular, the relative speed1(this term hereafter stands for
the relative speed between object and sensor pad) clearly illustrates that
1The relative speed has been reconstructed as the numerical time derivative of the
measured displacement filtered with a 2nd order low-pass Butterworth filter, which has
15

0 1 2 3 4 5 6 7 8 9 10−1.5
−1
−0.5
0
0.5
1
time [s]
forc
e [N
]
y model.y meas.
fn meas.
0 1 2 3 4 5 6 7 8 9 10−1.5
−1
−0.5
0
0.5
1
1.5
rel.
spee
d [m
m/s
]
time [s]
0 1 2 3 4 5 6 7 8 9 10−2
−1
0
1
rel.
disp
l. [m
m]
measuredmodelled
measuredmodelled
2.4 2.6 2.8−0.6
−0.55
Figure 3: Experimental-numerical correlation during a stick-slip motion at 0.25Hz.
the slippage happens when large enough tangential force is applied, while
the object sticks for low values of the applied force, that is a behaviour
perfectly predicted by the LuGre model. As it will be useful later on, it
should be noted how during such stick-slip motion the relative speed periodic
waveform contains a large third harmonic even with an almost sinusoidal
tangential force. The model accuracy can be better appreciated looking
at the reconstruction errors in terms of tangential force and relative speed
reported in Fig. 4. A comment is in order concerning the normal force, which
is not perfectly constant since the vertical voice coil is fed with a constant
current and it is not force controlled, thus slight oscillations are caused by
imperfect mechanical alignments not compensated for by a force loop.
Looking at both the tangential force and the relative speed in Fig. 3, it
is apparent that the measured quantities are affected by the presence of a
been applied with a forward and backward recursion to compensate for the phase lag.
16

0 1 2 3 4 5 6 7 8 9 10
−0.1
−0.05
0
0.05
0.1
0.15
time [s]
[N]
tangential force error
0 1 2 3 4 5 6 7 8 9 10−1.5
−1
−0.5
0
0.5
1
1.5
time [s]
[mm
/s]
relative speed error
Figure 4: Modelling errors during a stick-slip motion at 0.25Hz.
relatively high frequency oscillation, which is not present in the modelled
signals. The large amplitude of the oscillations on the speed signal can be
mainly attributed to the noise affecting the position measurement and not
fully rejected by the off-line pre-processing for reconstruction of its time
derivative. However, the high frequency component of the tangential force
signal, clearly visible in the magnified portion of the plot, is a well-known
phenomenon due to the mechanical vibrations that occur during sliding mo-
tion, i.e., irregularities on the contact surfaces that slide against each other
cause high frequency deformations of the sensor pad detected by the force
sensor [14, 23, 24]. Unfortunately, such phenomena are not predicted by
the presented friction model and are extremely difficult to model, possible
approaches rely on statistical mechanics [27]. Thus, according to a classi-
cal approach used in control theory, an exogenous signal has been added to
the model as representative of such unmodelled dynamics, and in particular
17
10 15 20 25 30−1
−0.75
−0.5
−0.25
0
0.25
0.5
time [s]
tang
entia
l for
ce [N
]
10 15 20 25 30−1
−0.5
0
0.5
1
1.5
2
rel.
spee
d [m
m/s
]
5 10 15 20 25 30 35 400
0.005
0.01
0.015
frequency [Hz]
spec
trum
mag
nitu
de [N
]
slippingno slipping
slipping non slipping
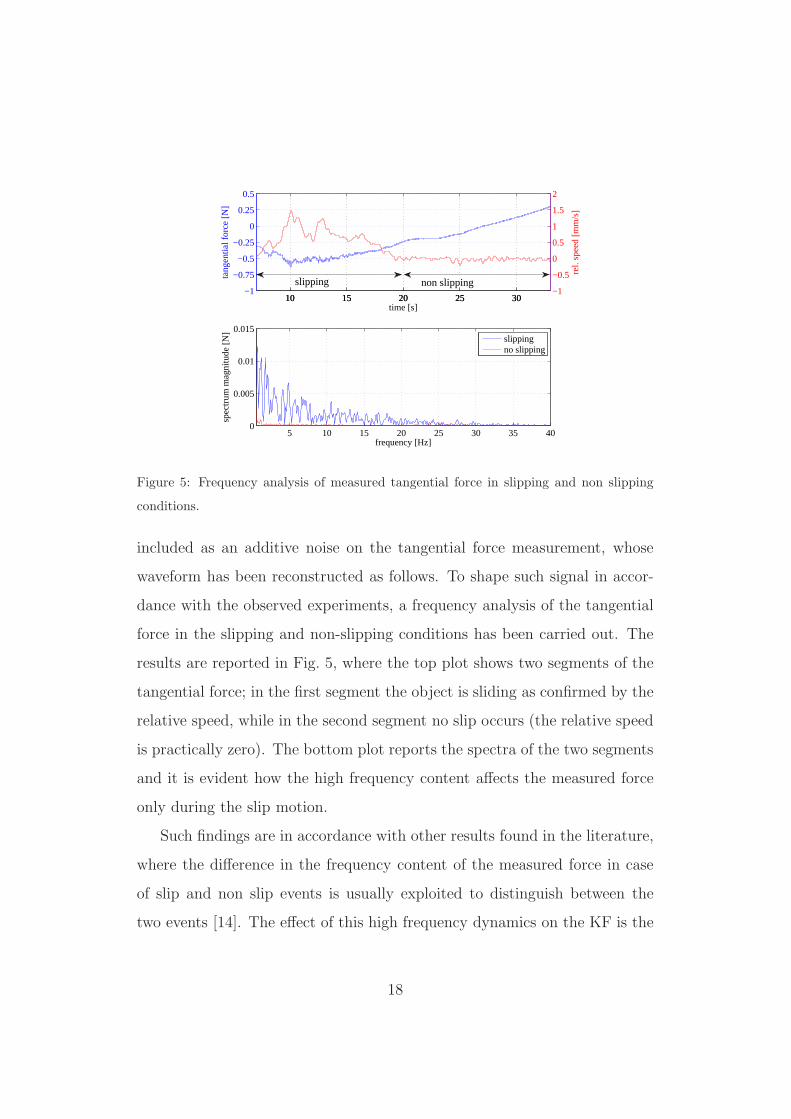
Figure 5: Frequency analysis of measured tangential force in slipping and non slipping
conditions.
included as an additive noise on the tangential force measurement, whose
waveform has been reconstructed as follows. To shape such signal in accor-
dance with the observed experiments, a frequency analysis of the tangential
force in the slipping and non-slipping conditions has been carried out. The
results are reported in Fig. 5, where the top plot shows two segments of the
tangential force; in the first segment the object is sliding as confirmed by the
relative speed, while in the second segment no slip occurs (the relative speed
is practically zero). The bottom plot reports the spectra of the two segments
and it is evident how the high frequency content affects the measured force
only during the slip motion.
Such findings are in accordance with other results found in the literature,
where the difference in the frequency content of the measured force in case
of slip and non slip events is usually exploited to distinguish between the
two events [14]. The effect of this high frequency dynamics on the KF is the
18

0 1 2 3 4 5 6 7 8 9 10−1.5
−1
−0.5
0
0.5
1
time [s]
forc
e [N
]
0 1 2 3 4 5 6 7 8 9 10−1.5
−1
−0.5
0
0.5
1
1.5
rel.
spee
d [m
m/s
]
time [s]
y model.y meas.
fn meas.
0 1 2 3 4 5 6 7 8 9 10−2
−1
0
1
rel.
disp
l. [m
m]
measuredmodelled
measuredmodelled
Figure 6: Experimental-numerical correlation during a stick-slip motion at 0.25Hz with
high frequency dynamics.
same of the disturbances acting on it, thus it can be exploited to detect the
slippage and it will be used in the friction estimation algorithm described in
detail in Section 5.2. Therefore, following the design criteria found in [28,
29], a sensor pad with epidermal micro-ridges has been produced by silicone
molding purposefully to enhance such high frequency dynamics and, as a
consequence, improve the effectiveness of the slipping detection algorithm
based on the monitoring of the KF residual. The presence of such additional
disturbance will also affect the selection of the detection threshold as it will
be explained in Section 4.2.
Therefore, to visualize such behaviour also in the dynamic simulator and
not to improve the real accuracy of the model, the previous simulation has
been repeated by including the high frequency dynamics as identified above
and added as a noise to the tangential force only during slipping motions.
The results are reported in Fig. 6, where both the tangential force and the
19

0 10 20 30 40 50 60 70 80 90−1.5
−1
−0.5
0
0.5
1
time [s]
forc
e [N
]
ft
fn
0 10 20 30 40 50 60 70 80 90−0.04−0.03−0.02−0.01
00.010.020.030.04
time [s]
dete
c. s
igna
l [N
]
0 10 20 30 40 50 60 70 80 90−2−1.5−1−0.500.511.52
rel.
spee
d [m
m/s
]
25 30 35 40 450
0.005
0.01
threshold
slipping slipping slipping slipping
Figure 7: Validation of the slipping detection algorithm.
relative speed are now affected by high frequency components. Note that
the oscillations of the measured relative speed are caused not only by this
high frequency dynamics but mainly by the measurement noise affecting the
displacement sensor, that explains the presence of the oscillations even for
low values of the relative speed, however this is not the case for the measured
tangential force.
It is worth remarking that in order to obtain the good accordance between
the measured and the modelled displacement in the simulations presented so
far it was necessary to include in the dynamic simulator a small asymmetrical
Coulomb friction force acting at the motor shaft of the horizontal voice coil.
4.2. Tuning and validation of the slipping detection algorithm
Once the dynamic model parameters have been refined, an experiment
has been performed to validate the slipping detection algorithm presented in
Section 3 and based on a suitable elaboration of the KF residual. Specifically,
the algorithm detects a slippage if a detection signal is larger than a selected
20

threshold. The detection signal is simply the low-pass filtered version of
the KF residual and its absolute value is then compared to the threshold
to be selected. The filter is aimed at removing from the residual only the
measurement noise at very high frequencies. The bandwidth of the filter is
selected at 5Hz so as to not attenuate most of the high frequency dynamics
appearing during slip motions, and remove the noise at the same time.
During the experiment, under a constant normal force of about 1N, a
periodic tangential force with waveform typical of the exploration phase de-
scribed in Section 5.2, has been applied to the sensor pad by feeding the
horizontal voice coil with an electrical current signal with trapezoidal shape,
whose amplitude is high enough to cause slippage. The results are reported
in Fig. 7. It is clear how during the slip motions, i.e., the time intervals when
the relative speed is not zero, the absolute value of the detection signal is
larger than the threshold Th, which has been selected at 0.005N and verified
to be effective in a number of experiments with different values of the applied
normal force.
21

+
vertical voice coil
horizontal voice coil
Forcesensor
Kalmanfilter
x÷
e
ft
y
fn
y
Ig
It
In
µc
Cs(z)Id
Iskn
Figure 8: Slipping avoidance control scheme.
5. Slipping avoidance algorithm: simulation and experiments
The slipping control scheme proposed in this paper is depicted in Fig. 8.
Basically, the algorithm computes the control signal, i.e., a suitable current
In to feed the vertical voice coil to adjust the normal force component fn.
Such control signal is composed by three contributions. The first one is a
constant value Ig that simply compensates for the weight of the mobile part
of the voice coil and the force sensor placed on its top. The second one Is
generates a normal force with a magnitude high enough to let the force vector
stay within the friction cone; in this way, in static conditions, there should
be no slipping at the contact between the sensor pad and the object. Such
normal force can be easily computed by measuring the actual tangential
force and dividing it by an estimate µc of the friction coefficient. In the
following, a method for obtaining such an estimate will be proposed based on
an initial exploration phase of the object to be manipulated, which precedes
the actual manipulation phase. The third contribution Id corresponds to the
22

portion of the normal force needed to increase the friction force in dynamic
conditions. One of the contributions of the present paper is a method to
calculate such force. In fact, most of the existing methods to avoid slippage
tend to constraint the contact force vector in the friction cone, that means
applying a normal force proportional to the measured tangential force [19,
30], however, this is sufficient only in quasi-static conditions. To ensure
slippage avoidance even in dynamic conditions, e.g. during robotic dynamic
manipulation, a way to compensate also for the inertial forces is needed.
The approach proposed in this work is to exploit the KF residual, which, as
already explained, increases as soon as the disturbance w is not zero, e.g., in
dynamic conditions (see Eq. (20)). Specifically, the control current In of the
vertical voice coil, that applies the grip force, is computed as follows.
In = Is + Id + Ig. (29)
Apart from the current Ig needed to compensate the weight of the vertical
voice coil, the first contribution to the control current is
Is = kn|y|
µc
, (30)
that is proportional to the absolute value of the ratio between the (measured
and filtered by the KF) tangential force y and an estimate of the friction co-
efficient µc. Note that the gain kn is needed to convert a desired normal force
into an electrical current feeding the vertical voice coil and it has been esti-
mated equal to 0.16A/N. In order to reduce the effects of the measurement
noise, the output of the KF y has been used as tangential force rather than
the direct measurement y. A slipping avoidance algorithm that works quite
well in quasi-static conditions composed only by this first part Is has already
been successfully tested in [17] and [15], but it can work only in quasi-static
conditions.
23

The second contribution Id is the absolute value of the slippage controller
Cs(z) output, which is a first-order low-pass filter with a dc gain kc = 5
and a cutoff frequency of 1Hz. The input of the controller is the Kalman
residual e. Note that the absolute value has to be taken in order to ensure
that the normal force is always a pushing force. The controller is basically
a proportional action on the Kalman error whose gain kc is computed as
follows. To avoid slippage even with a changing tangential force, the normal
force corresponding to the control current computed by the controller (apart
from the gravity compensation term) should stay within the friction cone,
i.e., it should exceed the ratio between the tangential force and the minimum
value of the friction coefficient corresponding to the minimum break-away
force as recalled in Section 2, call it µmin, i.e.,
|ft|
µc
+ kc|e| >|ft|
µmin
. (31)
From the above equation one could, of course, choose µc < µmin and kc = 0,
but this would result into unnecessarily high grip forces even in static condi-
tions. Whereas, the proposed idea is to increase the grip force on the basis of
the Kalman error so as to increase the normal force only in the presence of
inertial loads that could cause the slippage, namely when the Kalman resid-
ual e increases. Given a desired minimum error e and a maximum allowed
tangential load ft, the gain kc can be easily computed from Eq. (31) as
kc >ft
e
(
1
µmin
−1
µc
)
. (32)
Assuming, for the following experiments, ft = 0.6N, µmin = 0.12, µc = 0.3
and e = 0.1N, the gain kc = 5 has been computed2. Of course, this approach
2The minimum value for the friction coefficient has been selected assuming a 40%
reduction of the kinetic friction coefficient in quasi-static conditions reported in Tab. 1.
24

is valid under the assumption that all involved signals keep limited. But, this
is certainly verified under the reasonable assumptions of bounded tangential
forces and bounded measurement noise. In fact, in such a case, the KF
always converges since the disturbance w remains bounded as soon as the
normal force is large enough that no relative motion between the object
and the sensor occurs and thus e keeps limited. The cutoff frequency of
the controller should be selected higher than the maximum frequency of
the applied tangential force and low enough to avoid amplification of the
measurement noise. In the following experiments it has been selected equal
to 1Hz since the maximum frequency of the tangential force is assumed
0.5Hz.
5.1. Slipping avoidance experiment with known friction coefficient
A first experiment to evaluate the slippage avoidance control algorithm
has been carried out by applying an external tangential force with a quasi-
sinusoidal signal, i.e., a sinusoid with time-varying frequency and amplitude
in the ranges of [0.1, 0.5] Hz and [0.3, 0.6] N, respectively. The friction co-
efficient has been assumed known in advance and the value µc needed to
compute the control current Is in Eq. (30) has been selected equal to 0.3,
which is the estimated friction coefficient between Teflonr and silicone as
reported in Tab. 1, as said, to limit as much as possible grasp forces. The fre-
quency range has been selected slightly lower than the maximum frequencies
measured in human manipulation tasks as reported in [31]. The amplitude
range has been selected on the basis of the corresponding values of the normal
force needed to avoid slippage, that are in the order of 3 − 6N as it will be
seen, which are very close to the acquired normal forces applied by fingertips
during actual human manipulation tasks such as grasping of bottles, cups
and unscrewing caps, which can be found in [32] and [33].
25

50 60 70 80 90 100 110 120−8
−6
−4
−2
0
time [s]
forc
e [N
]
fn model.
fn meas.
50 60 70 80 90 100 110 120
0
0.5
1
time [s]
rel.
pos.
[mm
]
50 60 70 80 90 100 110 120
0
1
rel.
spee
d [m
m/s
]
modelledmeasured
modelledmeasured
slipping avoidance control ON
Id = 0
Figure 9: Slipping avoidance control experiment and simulation in the case of a known
friction coefficient.
The results are reported in Fig. 9, where the plot on the top shows the
normal force computed by the slipping control algorithm on the basis of a
known friction coefficient and the measured tangential force. The plot on the
bottom shows that the relative speed between the object and the sensor pad
keeps very low while the dynamic slipping avoidance control action is active.
It is important to notice that the position sensor signal, reported in the
same plot, is the superposition of the deformation of the sensor pad and the
actual relative displacement. Taking into account the pad stiffness 4000N/m
and the maximum applied tangential force of 0.6N, such deformation can
be up to 0.15mm. This explains why the relative position signal oscillates
even in absence of slippage (until 98 s). Nevertheless, it is clear from the
position signals that when slippage occurs it has an amplitude much higher
than 0.15mm; moreover, as soon as the control action Id is switched off (at
98 s), even with the static slipping avoidance control action Is still active,
26

50 60 70 80 90 100 110 1200
0.5
1
1.5
time [s]
cont
rol c
urre
nts
[A]
Is+I
g
Id
In
50 60 70 80 90 100 110 120−1
−0.5
0
0.5
1
time [s]
rel.
spee
d [m
m/s
]
model.meas.
Figure 10: Slipping avoidance control experiment and simulation in the case of a known
friction coefficient: control currents (top) and slipping events (bottom).
a slow drift of the relative position starts. This means that the object is
actually sliding over the sensor pad surface, even though the slippage occurs
periodically as confirmed by the high peaks of the relative speed, which has
a large third harmonic as typical of stick-slip motions already evidenced in
Section 4.1. To better appreciate the effect of the dynamic control action
Id, its time history is reported in Fig. 10 together with the static control
actions Is+ Ig and the total control action In. The same figure also shows in
the bottom plot the relative speed with the slipping events clearly indicated.
It is evident that such events occur in correspondence with the minima of
the control current In, which contains only quasi-static terms. This confirms
that in dynamic conditions, a normal force computed on the basis of a well-
known friction coefficient and the sole tangential force is not sufficient to
avoid object slippage. Note that in the figure the simulation results are also
reported in the same case study and they evidently are in a good accordance
27

+ _+
+
µch
µch∆µch
1
1
0
eh LPFshdh αµc
−Th Th νTh−νTh
γµc
z−1
Figure 11: Block scheme of the estimation algorithm of the friction coefficient.
with the experiments.
5.2. Friction estimation algorithm
In order to relax the hypothesis of a known friction coefficient and provide
a good estimate µc of the friction coefficient to the slipping avoidance algo-
rithm presented above, a novel algorithm for friction coefficient estimation is
proposed here and sketched in Fig. 11. It is based on an exploration phase
that has to be carried out, before grasping the object, by rubbing the sensor
pad on the object surface applying a slowly increasing tangential force3 and
activating only the control action Is = kn|y|µc, while Id = 0. Differently from
the experiments already presented, the friction coefficient is being updated
by subtracting to an initial estimation µc a time-varying correction ∆µch,
i.e.,
µch = µc −∆µch. (33)
The correction is updated on the basis of a slipping detection signal dh ob-
tained by applying a low-pass filter to the KF residual eh with a cutoff fre-
quency of 5Hz, which is high enough to not attenuate the high frequency
oscillations occurring during object slipping and low enough to remove the
measurement noise. The signal dh is then converted into a decision signal sh
3The rate of increase should be low enough to get a break-away force high enough to
get a friction coefficient close to the static friction.
28

that is 0 if no correction is necessary or 1 if a correction is needed, i.e., it is
computed as
sh =
0 if |dh| ≤ Th
1 if |dh| > νTh
0.5− 0.5 cos(
πTh(ν−1)
dk −π
ν−1sign(dh)
)
otherwise
, (34)
with Th the threshold already defined in Section 4.2 and ν > 1 is an integer
number that defines the width of a smoothing zone. The smoothing zone has
been introduced to avoid rapid changes in the friction coefficient and thus in
the control normal force. Finally, the correction to the friction coefficient is
computed according to the following update law
∆µch+1=
∆µch + αµcsh if ∆µch ≤ γµc
∆µch otherwise, (35)
where γ ∈ (0, 1) limits the correction to a fraction of the initial estimate
µc and α is the adaptation gain. Note how the minimum friction coefficient
cannot be lower than the value (1− γ)µc.
In order to tune the parameters γ, ν, α of the estimation algorithm, a
simulation study has been carried out on the dynamic model setup in the
previous sections and guidelines for their selection are provided. Specifically,
the haptic exploration test aimed at estimating the contact friction coefficient
has been simulated by applying an increasing tangential force with a fixed
slope to the object in contact with the sensor pad.
The saturation parameter γ is chosen to avoid excessive normal forces
by imposing a lower bound to the friction coefficient µc, the adaptation gain
α and the integer ν have to be selected as a trade off between the need of
gradual changes of µc and the need of a fast learning phase. A lower bound
for the gain α can be easily obtained by assuming that during the manoeuver
29

the decision signal sh is always 1 such that µch reaches the presumed static
friction coefficient µs, namely
µs = µc −α
Tµct ⇒ α =
T
t
(
1−µs
µc
)
, (36)
where T is the sampling time and the initial guess µc has to be selected
higher than µs4 and t is the desired execution time of the exploration phase,
which should be large enough to ensure quasi-static conditions so that the
break-away force is close to the stiction force. Concerning the algorithm
convergence, note that µch can only decrease, thus the applied normal force
is always increasing and so the break-away force. By selecting α larger than
the lower bound in (36), the break-away force will increase at a rate high
enough that the tangential force does not overcome it and the sliding motion
stops, therefore the mean of the Kalman residual eh tends to zero (in practice,
the detection signal dh at the output of the LPF decreases below the threshold
Th selected on the basis of the noise power level) and the computed correction
∆µch becomes constant. The actual value of α has to be tuned experimentally
since the signal sh during the sliding is not constantly equal to 1 because
the detection signal oscillates at the frequency typical of the high frequency
dynamics phenomenon described in Section 4 (see Fig. 5). The gain α should
be also kept small enough to avoid saturation of the estimation algorithm to
the value (1− γ)µc.
Following these guidelines, a simulation of an exploration phase lasting
t = 10 s has been carried out with an initial estimate of the friction coefficient
µc = 0.5, which is much larger than the actual friction coefficient of the
contact with the Teflonr material reported in Tab. 1. With such a large
4In any case, µc should be selected large enough to allow sliding during the initial phase
of the exploration manoeuver.
30

0 10 20 30 40 50 60 70 80 90 100−4
−3
−2
−1
0
1
time [s]
forc
e [N
]
yyfn
0 10 20 30 40 50 60 70 80 90 100
0.2
0.3
0.4
0.5
time [s]
µ c
0 10 20 30 40 50 60 70 80 90 1000
0.005
0.01
0.015
0.02
0.025
0.03
dete
ctio
n si
gnal
[N]
adaptation OFFadaptation ON
threshold
Figure 12: Learning phase of the friction coefficient: simulation.
friction coefficient used to compute the applied normal force, it is expected
that when the amplitude of the tangential force becomes high enough, a
slippage occurs. This is confirmed by the simulation results shown in Fig. 12,
where, in the first 30 seconds when the adaptation is off, a slippage occurs
(see how the detection signal is larger than the threshold). Starting with an
initial value of α = 4·10−5 obtained using Eq. (36) where µs has been selected
equal to the value in Tab. 1, it has been increased until the value 6 · 10−4
at which the algorithm saturates during the exploration time at the value
γµc with γ = 0.7 (which means that the initial friction coefficient estimate
can be decreased down to its 30%). The final value is then selected at the
half of such value, i.e. α = 3 · 10−4, which allows to avoid saturation and
obtain the convergence within the duration of the exploration phase. The
last parameter to select is the smoothing factor ν which has been chosen
equal to 3 as a compromise between speed of convergence and smoothness
of the applied normal force. With such parameters, the adaption algorithm
31

0 10 20 30 40 50 60 70 80 90 100−4
−3
−2
−1
0
1
time [s]
forc
e [N
]
yyfn
0 10 20 30 40 50 60 70 80 90 100
0.2
0.4
time [s]
µ c
0 10 20 30 40 50 60 70 80 90 1000
0.005
0.01
0.015
0.02
0.025
0.03
dete
ctio
n si
gnal
[N]
threshold
adaptation ONadaptation OFF
Figure 13: Learning phase of the friction coefficient: experiment.
is activated after 30 s and the correction to the friction coefficient starts at
40 s as soon as the sliding starts as indicated by the detection signal that
overcomes the threshold. It is evident how during the adaptation, between
40 s and 50 s, the normal force increases at an increasing rate due to the
decreasing value of µch, until the sliding stops and so the update of µch.
Note that the friction coefficient has been reduced to a value in between the
static and kinetic friction coefficients reported in Tab. 1, i.e., about 0.24. This
is what is typically done in robotic grasping tasks to avoid object slippage,
namely constraining the contact force vector to stay within the friction cone
by using a friction coefficient lower than the static friction [30, 3]. The
simulation continues to show that with the friction coefficient so corrected no
further slippage occurs (the detection signal is always far below the threshold)
and thus no correction is computed by the adaptive law.
To validate the estimation algorithm described so far, the same haptic
exploration procedure has been experimentally executed using the same pa-
32

0 20 40 60 80 100 120−8
−6
−4
−2
0
2
time [s]
forc
e [N
]
yyfn
0 20 40 60 80 100 120−0.4
−0.2
0
0.2
0.4
time [s]
rel.
spee
d [m
m/s
], µ c
0 20 40 60 80 100 120−0.75
−0.5
−0.25
0
0.25
0.5
0.75
1
filte
r re
sid.
[N]
slipping avoidance control ONcontrol OFF
learning of the friction coefficient
µc
Figure 14: Final experiment: preliminary exploration phase (0− 38 s), full slipping avoid-
ance control on (38− 98 s), dynamic slipping avoidance control off (98− 120 s).
rameters tuned in simulation. The results are reported in Fig. 13 where the
system behaviour is practically the same of that obtained in simulation. The
final value of the estimated friction coefficient is 0.21 with a difference of 12%
with respect to the simulation.
5.3. Slipping avoidance experiment with unknown friction coefficient
The features of all the algorithms presented in the paper are now high-
lighted by showing the results of a single experiment composed by three
phases. In the first phase the initial friction coefficient estimate is adapted
to the actual contact feature by executing a preliminary exploration proce-
dure with the same parameters used in the previous experiment, i.e., ac-
tivating the static slippage control action Is and not the dynamic one Id,
but starting from an initial guess µc = 0.4. The adaptive law, activated
during the first slippage occurring between 10 s and 20 s, computes correc-
tions ∆µch leading to a final value of µc ≃ 0.26. At about 38 s the second
33

phase starts, i.e., the dynamic slipping avoidance is turned on. At the same
time, a pseudo-sinusoidal tangential force with time-varying amplitude and
frequency is applied to the object and the whole control current In in (29) is
applied to the vertical voice coil resulting into a time-varying normal force
that increases and decreases not only in correspondence with the tangential
force y but also on the basis of the KF residual (reported in Fig. 14 on the
right vertical axis in red) that is significantly different from zero in dynamic
conditions. Such normal force is effective in avoiding the object slippage dur-
ing this phase as proved by the small measured relative speed (reported in
blue on the left vertical axis of the figure). The third phase of the experiment
starts at approximately 98 s, when the dynamic slipping avoidance control
action is turned off and only the static one is left active, while a sinusoidal
tangential force with fixed amplitude and frequency is applied to the object.
The relative speed is significantly larger than in the second phase and again
with a deformed waveform typical of stick-slip motion, implying that slippage
occurs periodically.
6. Conclusions
The paper proposed a novel method for slipping detection and avoidance
based on a Kalman filter designed on the basis of a dynamic model describing
the contact behaviour between a compliant force sensor pad and a manipu-
lated object. The slipping detection algorithm is exploited in a preliminary
haptic exploration phase of the object surface to on-line estimate the actual
friction coefficient at the contact through an adaptive strategy. Based on
the estimated friction coefficient and the KF residual, the slipping avoidance
control law is able to adjust the grip force both in quasi-static and dynamic
conditions.
34

A limitation of the proposed approach is that the slipping control strategy
is effective only under the assumption that the actual friction coefficient does
not change during the manipulation. Future work will be devoted to relax
such assumption, e.g. by suitable filtering of the Kalman residual that should
allow to distinguish between slippage due to friction coefficient changes and
dynamic effects. Furthermore, currently, the analysis has been performed
only with reference to contact forces, ignoring contact moments, assuming
that only translations can occur. Therefore, future work will be devoted to
extend such approach to torsional moments that build up when distributed
contacts occur and rotations are allowed. Finally, the commercial force sensor
will be substituted with a force/tactile sensor specifically designed to be
integrated into a robotic hand for testing the proposed algorithms in a real
robotic manipulation task.
Acknowledgments
The research leading to these results has been funded by the Italian Min-
istry of University and Research (MIUR), grant PRIN2009 “ROCOCO”.
References
[1] R. D. Howe, Tactile sensing and control of robotic manipulation, Journal
of Advanced Robotics 8 (3) (1994) 245–261.
[2] I. Birznieks, M. K. O. Burstedt, B. B. Edin, R. S. Johansson, Mecha-
nisms for force adjustments to unpredictable frictional changes at indi-
vidual digits during two-fingered manipulation, Journal of Neurophysi-
ology 80 (4) (1998) 19892002.
[3] M. R. Tremblay, M. R. Cutkosky, Estimating friction using incipient
slip sensing during a manipulation task, in: Proc. of the 1993 IEEE
35

Int. Conference on Robotics and Automation, Atlanta, GA, 1993, pp.
429–434.
[4] N. Xydas, I. Kao, Modeling of contact mechanics and friction limit sur-
faces for soft fingers in robotics, with experimental results, The Inter-
national Journal of Robotics Research (1999) 941950.
[5] T. Maeno, T. Kawamura, S. Cheng, Friction estimation by pressing an
elastic finger-shaped sensor against a surface, IEEE Trans. on Robotics
and Automation 20 (2) (2004) 222–228.
[6] K. Nakamura, H. Shinoda, Tactile sensing device instantaneously eval-
uating friction coeffcients, in: Proc. of the 18th Sensor Symposium,
Kawasaki, J, 2001, pp. 151–154.
[7] P. Dahl, A solid friction model, Tech. Rep. TOR-0158H3107-18I-1, The
Aerospace Corporation, El Segundo, CA (1968).
[8] J. Swevers, F. Al-Bender, C. Ganseman, T. Prajogo, An integrated fric-
tion model structure with improved presliding behaviour for accurate
friction compensation, IEEE Trans. on Automatic Control 45 (4) (2000)
675–686.
[9] C. Canudas de Wit, H. Olsson, K. J. Astrom, P. Lishinsky, A new model
for control of systems with friction, IEEE Trans. on Automatic Control
40 (5) (1995) 419–425.
[10] K. J. Astrom, C. Canudas de Wit, Revisiting the lugre friction model:
Stick-slip motion and rate-dependence, IEEE Control Systems Magazine
28 (6) (2008) 101–114.
36

[11] X. Song, H. Liu, J. Bimbo, K. Althoefer, L. D. Seneviratne, Object
surface classification based on friction properties for intelligent robotic
hands, in: Proc. of World Automation Congress WAC 2012), Puerto
Vallarta, MX, 2012, pp. 1–5.
[12] G. Ferretti, G. Magnani, P. Rocco, Modular dynamic modeling and
simulation of grasping, in: Proc. of the 1999 IEEE/ASME Int. Conf. on
Advanced Intelligent Mechatronics, Atlanta, GA, 1999, pp. 428–433.
[13] M. T. Francomano, D. Accoto, E. Guglielmelli, Artificial sense of slip-a
review, IEEE Sensors Journal 13 (7) (2013) 2489–2498.
[14] M. Vatani, E. D. Engeberg, J.-W. Choi, Force and slip detection
with direct-write compliant tactile sensors using multi-walled carbon
nanotube/polymer composites, Sensors and Actuators A: Physical 195
(2013) 90–97.
[15] G. De Maria, C. Natale, S. Pirozzi, Slipping control through tactile
sensing feedback, in: Proc. of the 2013 IEEE Int. Conf. on Robotics and
Automation, Karlsruhe, DE, 2013, pp. 3508–3513.
[16] G. De Maria, C. Natale, S. Pirozzi, Tactile data modelling and interpre-
tation for stable grasping and manipulation, Robotics and Autonomous
Systems 61 (2013) 1008–1020.
[17] G. De Maria, C. Natale, S. Pirozzi, Tactile sensor for human-like manip-
ulation, in: Proc. of the 2012 IEEE RAS/EMBS Int. Conf. on Biomed-
ical Robotics and Biomechatronics, Rome, I, 2012, pp. 1686–1691.
[18] B. Heyneman, M. R. Cutkosky, Slip interface classification through tac-
tile signal coherence, in: Proc. of the 2013 IEEE/RSJ Int. Conference
on Intelligent Robots and Systems, Tokyo, 2013, pp. 801–808.
37

[19] E. D. Engeberg, S. G. Meek, Adaptive sliding mode control for pros-
thetic hands to simultaneously prevent slip and minimize deformation
of grasped objects, IEEE/ASME Trans. on Mechatronics 18 (1) (2013)
376–385.
[20] J. Ueda, A. Ikeda, T. Ogasawara, Grip-force control of an elastic object
by vision-based slip-margin feedback during the incipient slip, IEEE
Trans. on Robotics 21 (6) (2005) 1139–1147.
[21] G. De Maria, C. Natale, S. Pirozzi, Force/tactile sensor for robotic ap-
plications, Sensors and Actuators A: Physical 175 (2012) 60–72.
[22] V. I. Johannes, M. A. Green, C. A. Brockley, The role of the rate of
application of the tangential force in determining the static force coeffi-
cient, Wear 24 (1973) 381–385.
[23] R. S. Dahiya, G. Metta, M. Valle, G. Sandini, Tactile sensing-from hu-
mans to humanoids, IEEE Trans. on Robotics 26 (2010) 1–20.
[24] J. Fishel, G. Loeb, Bayesian exploration for intelligent identification of
textures, Frontiers in Neurorobotics 6 (2012) 1–20.
[25] A. D’Amore, G. De Maria, L. Grassia, C. Natale, S. Pirozzi, Silicone-
rubber-based tactile sensors for the measurement of normal and tangen-
tial components of the contact force, Journal of Applied Polymer Science
122 (6) (2011) 3758–3770.
[26] C. H. Lin, T. W. Erickson, J. A. Fishel, N. Wettels, G. E. Loeb, Sig-
nal processing and fabrication of a biomimetic tactile sensor array with
thermal, force and microvibration modalities, in: Proc. of the IEEE In-
ternational Conference on Robotics and Biomimetics, 2009, pp. 129–134.
38

[27] B. N. J. Persson, Sliding Friction: Physical Principles and Applications,
Springer-Verlag, Berlin, DE, 1998.
[28] Y. Zhang, Sensitivity enhancement of a micro-scale biomimetic tactile
sensor with epidermal ridges, Journal of Micromechanics and Microengi-
neering 20 (2010) 1–7.
[29] J. J. Cabibihan, H. Lin Oo, S. Salehi, Effect of artificial skin ridges on
embedded tactile sensors, in: Proc. of the IEEE Haptics Symposium
2012, Vancouver, BC, 2012, pp. 439–442.
[30] C. Melchiorri, Slip detection and control using tactile and force sensors,
IEEE/ASME Trans. on Mechatronics 5 (3) (2000) 235–242.
[31] F. Gao, M. L. Latash, V. M. Zatsiorsky, Internal forces during object
manipulation, Experimental Brain Research 165 (1) (2005) 69–83.
[32] P. Falco, A kinetostatic data fusion system for observation of human
manipulation, PhD Thesis, Seconda Universita degli Studi di Napoli.
URL http://research.diii.unina2.it/acl/docs/ThesisFalco.pdf
[33] A. Cavallo, P. Falco, On-line segmentation and classification of manip-
ulation actions from the observation of kinetostatic data, IEEE Trans.
on Human-Machine Systems (2013) accepted for publication.
List of Figures
1 Sketch of the contact model: tangential dynamics. . . . . . . . 6
2 The experimental setup. . . . . . . . . . . . . . . . . . . . . . 13
3 Experimental-numerical correlation during a stick-slip motion
at 0.25Hz. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
39

4 Modelling errors during a stick-slip motion at 0.25Hz. . . . . . 17
5 Frequency analysis of measured tangential force in slipping
and non slipping conditions. . . . . . . . . . . . . . . . . . . . 18
6 Experimental-numerical correlation during a stick-slip motion
at 0.25Hz with high frequency dynamics. . . . . . . . . . . . . 19
7 Validation of the slipping detection algorithm. . . . . . . . . . 20
8 Slipping avoidance control scheme. . . . . . . . . . . . . . . . 22
9 Slipping avoidance control experiment and simulation in the
case of a known friction coefficient. . . . . . . . . . . . . . . . 26
10 Slipping avoidance control experiment and simulation in the
case of a known friction coefficient: control currents (top) and
slipping events (bottom). . . . . . . . . . . . . . . . . . . . . . 27
11 Block scheme of the estimation algorithm of the friction coef-
ficient. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
12 Learning phase of the friction coefficient: simulation. . . . . . 31
13 Learning phase of the friction coefficient: experiment. . . . . . 32
14 Final experiment: preliminary exploration phase (0 − 38 s),
full slipping avoidance control on (38−98 s), dynamic slipping
avoidance control off (98− 120 s). . . . . . . . . . . . . . . . . 33
40




















