Slipping during side-step cutting: Anticipatory effects and familiarization
9
Slipping during side-step cutting: Anticipatory effects and familiarization Anderson Souza Castelo Oliveira a , Priscila Brito Silva a , Morten Enemark Lund b , Dario Farina c , Uwe Gustav Kersting a,⇑ a Center for Sensory-Motor Interaction, Department of Health Science and Technology, Aalborg University, Aalborg, Denmark b Department of Mechanical and Manufacturing Engineering, Aalborg University, Aalborg, Denmark c Department of Neurorehabilitation Engineering, Bernstein Focus Neurotechnology Göttingen, Bernstein Center for Computational Neuroscience, University Medical Center Göttingen, Georg-August University, Göttingen, Germany article info Article history: Available online 22 February 2014 PsycINFO classification: 2330 Keywords: Side-step cutting Slips Anticipation EMG Kinematics abstract The aim of the present study was to verify whether the expectation of perturbations while performing side-step cutting manoeuvres influences lower limb EMG activity, heel kinematics and ground reaction forces. Eighteen healthy men performed two sets of 90° side-step cutting manoeuvres. In the first set, 10 unperturbed trials (Base) were performed while stepping over a moveable force plat- form. In the second set, subjects were informed about the random possibility of perturbations to balance throughout 32 trials, of which eight were perturbed (Pert, 10 cm translation triggered at initial contact), and the others were ‘‘catch’’ trials (Catch). Center of mass velocity (CoM VEL ), heel acceleration (H AC ), ground reaction forces (GRF) and surface electromyography (EMG) from lower limb and trunk muscles were recorded for each trial. Surface EMG was analyzed prior to initial contact (PRE), during load acceptance (LA) and propulsion (PRP) periods of the stance phase. In addition, hamstrings-quadriceps co-contraction ratios (CCR) were calculated for these time-windows. The results showed no changes in CoM VEL , H AC , peak GRF and surface EMG PRE among conditions. However, during LA, there were increases in tibialis anterior EMG (30–50%) concomitant to reduced EMG for quadriceps muscles, gluteus and rectus abdominis for Catch and Pert conditions (15–40%). In addi- tion, quadriceps EMG was still reduced during PRP (p < .05). Conse- quently, CCR was greater for Catch and Pert in comparison to Base http://dx.doi.org/10.1016/j.humov.2013.12.009 0167-9457/Ó 2014 Published by Elsevier B.V. ⇑ Corresponding author. Address: Center for Sensory-Motor Interaction (SMI), Department of Health Science and Technology, Aalborg University, Fredrik Bajers Vej 7 D-3, DK-9220 Aalborg, Denmark. Tel.: +45 99408821; fax: +45 98154008. E-mail address: [email protected] (U.G. Kersting). Human Movement Science 34 (2014) 128–136 Contents lists available at ScienceDirect Human Movement Science journal homepage: www.elsevier.com/locate/humov
Transcript of Slipping during side-step cutting: Anticipatory effects and familiarization

Human Movement Science 34 (2014) 128–136
Contents lists available at ScienceDirect
Human Movement Science
journal homepage: www.elsevier .com/locate/humov
Slipping during side-step cutting: Anticipatoryeffects and familiarization
http://dx.doi.org/10.1016/j.humov.2013.12.0090167-9457/� 2014 Published by Elsevier B.V.
⇑ Corresponding author. Address: Center for Sensory-Motor Interaction (SMI), Department of Health Science and TecAalborg University, Fredrik Bajers Vej 7 D-3, DK-9220 Aalborg, Denmark. Tel.: +45 99408821; fax: +45 98154008.
E-mail address: [email protected] (U.G. Kersting).
Anderson Souza Castelo Oliveira a, Priscila Brito Silva a, Morten Enemark Lund b,Dario Farina c, Uwe Gustav Kersting a,⇑a Center for Sensory-Motor Interaction, Department of Health Science and Technology, Aalborg University, Aalborg, Denmarkb Department of Mechanical and Manufacturing Engineering, Aalborg University, Aalborg, Denmarkc Department of Neurorehabilitation Engineering, Bernstein Focus Neurotechnology Göttingen, Bernstein Center for ComputationalNeuroscience, University Medical Center Göttingen, Georg-August University, Göttingen, Germany
a r t i c l e i n f o
Article history:Available online 22 February 2014
PsycINFO classification:2330
Keywords:Side-step cuttingSlipsAnticipationEMGKinematics
a b s t r a c t
The aim of the present study was to verify whether the expectationof perturbations while performing side-step cutting manoeuvresinfluences lower limb EMG activity, heel kinematics and groundreaction forces. Eighteen healthy men performed two sets of 90�side-step cutting manoeuvres. In the first set, 10 unperturbed trials(Base) were performed while stepping over a moveable force plat-form. In the second set, subjects were informed about the randompossibility of perturbations to balance throughout 32 trials, ofwhich eight were perturbed (Pert, 10 cm translation triggered atinitial contact), and the others were ‘‘catch’’ trials (Catch). Centerof mass velocity (CoMVEL), heel acceleration (HAC), ground reactionforces (GRF) and surface electromyography (EMG) from lower limband trunk muscles were recorded for each trial. Surface EMG wasanalyzed prior to initial contact (PRE), during load acceptance(LA) and propulsion (PRP) periods of the stance phase. In addition,hamstrings-quadriceps co-contraction ratios (CCR) were calculatedfor these time-windows. The results showed no changes in CoMVEL,HAC, peak GRF and surface EMG PRE among conditions. However,during LA, there were increases in tibialis anterior EMG (30–50%)concomitant to reduced EMG for quadriceps muscles, gluteus andrectus abdominis for Catch and Pert conditions (15–40%). In addi-tion, quadriceps EMG was still reduced during PRP (p < .05). Conse-quently, CCR was greater for Catch and Pert in comparison to Base
hnology,

A.S.C. Oliveira et al. / Human Movement Science 34 (2014) 128–136 129
(p < .05). These results suggest that there is modulation of muscleactivity towards anticipating potential instability in the lower limbjoints and assure safety to complete the task.
� 2014 Published by Elsevier B.V.
1. Introduction
Human locomotion requires a complex integration of commands from many sources such as thebrain, spinal cord, muscles and skin (Cappellini, Ivanenko, Dominici, Poppele, & Lacquaniti, 2010; Lac-quaniti, Ivanenko, & Zago, 2012; Rossignol, Dubuc, & Gossard, 2006). Muscle recruitment during loco-motion is constantly tuned to assure safe displacement, which relies on superior inputs from thevestibular system and peripheral information regarding muscle tension and joint positioning (Daley& Biewener, 2006; Duysens, Beerepoot, Veltink, Weerdesteyn, & Smits-Engelsman, 2008; Rossignolet al., 2006). In this way, it is possible to also rapidly react to unexpected perturbations to balancewhile walking or running.
Interestingly, there are other features of the central nervous system that may trigger protectivemotion patterns if locomotion deviates from what is anticipated. For example, Cappellini et al.(2010) have observed substantial changes in the walking pattern of healthy subjects while walkingover a slippery surface. In addition, reduced ground reaction force, heel acceleration, flatter foot ori-entation and more vertical shank positioning are usual modifications of the gait pattern when expect-ing perturbations (Beschorner & Cham, 2008; Cham & Redfern, 2002; Marigold & Patla, 2002; Oliveira,Farina, & Kersting, 2012). Awareness of perturbations to balance also alters muscular activity (mea-sured by electromyography, EMG) as an attempt to unconsciously provide a more cautious gait pat-tern, especially after experiencing perturbations (Bunday et al., 2006; Reynolds & Bronstein, 2003).
Although there are many protective mechanisms to avoid falls, these features are not sufficient toprovide stability and/or protection during some sports gestures such as cutting manoeuvres which areintimately related to knee injuries, especially sprains and ligament ruptures (Alentorn-Geli et al.,2009; Drakos et al., 2010; Zebis, Andersen, Bencke, Kjær, & Aagaard, 2009). Previous investigationshave shown that the activation of knee flexor muscles at initial contact may not be fast and strong en-ough for maintaining joint stability during an injury event (Oliveira, Silva, Lund, Gizzi, et al., 2013; Ze-bis et al., 2009). In addition, the EMG patterns of activation during unplanned cutting manoeuvres aredifferent from planned tasks (Besier, Lloyd, & Ackland, 2003), suggesting that muscle recruitment toperform cutting manoeuvres is susceptible to alterations on various levels of the neuromuscular sys-tem. As a result of this, unexpected changes in the environment during cutting manoeuvres may leadto severe injuries. Indeed, unexpected perturbations to balance while performing cutting manoeuvresmay reduce activation of knee flexors and consequently reduce knee stability shortly after perturba-tion onset (Oliveira, Silva, Lund, Gizzi, et al., 2013). However, little is known about the effects of antic-ipation on the performance of cutting manoeuvres that might be perturbed.
It has been suggested that protective mechanisms to maintain balance are formed by experiencingprevious perturbations, allowing optimized proactive strategies for safer displacement (Cappelliniet al., 2010; Marigold & Patla, 2002; Oliveira et al., 2012; Parijat & Lockhart, 2011). Therefore, theaim of the present investigation was to verify whether anticipation of perturbations while performingcutting manoeuvres influence lower limb EMG activity, heel kinematics and forces applied to theground. We hypothesized that specific changes in loading, kinematics and lower limb muscle activityare triggered by expecting perturbations to balance during the execution of side-step cutting move-ments. The results from this investigation may have implications for the understanding of protectivemechanisms during unexpected and expected perturbations to balance while performing sportsgestures.

130 A.S.C. Oliveira et al. / Human Movement Science 34 (2014) 128–136
2. Methods
2.1. Subjects
Eighteen healthy men (age: 27 ± 2 yrs; body mass: 70 ± 8 kg; body height: 173 ± 8 cm) volunteeredfor the experiment. All subjects were recreational practitioners of team sports (soccer, basketball,handball, ice hockey). They had no known history of neurological or motor disorders. All subjects pro-vided written informed consent before participation and the procedures were approved by the ethicalcommittee of Northern Jutland (N-20100042).
2.2. Experimental setup
Subjects were asked to perform repeated running trials with a 90� change in direction (side-stepcutting manoeuvre) during a single session. The task consisted of running from 6 to 7 m away of amoveable force platform, aiming to step with the right foot onto the plate, turn 90� to the left and con-tinue running. Initially, subjects were familiarized to the side-cutting manoeuvre by performing 10–15 trials in which the goal was run in a straight line towards the force platform, step with the rightfoot onto the platform and quickly turn to the left for continuing running. Subsequently, 10 unper-turbed cutting manoeuvres were recorded as baseline trials (Base). After this, subjects were informedthat the next set of trials would include perturbed trials. In this second set of trials subjects performed32 cutting manoeuvres, in which 24 were not perturbed (Catch) and eight were perturbed (Pert), andthe order of trials was randomized. Throughout the protocol there were 40–60 s rest intervals withineach trial to reduce the effects of fatigue, and a longer rest interval (2 min) was offered after each 8thtrial. The perturbations consisted of 10-cm translation lasting 150 ms (average speed 66.6 cm/s) in theoriginal running direction (Oliveira, Silva, Lund, Gizzi, et al., 2013). The acceleration phase of such per-turbations lasted approximately 80 ms, reaching peak acceleration after 40 ms (5.6 cm�s�2). The decel-eration phase lasted approximately 72 ms, reaching peak deceleration after 35 ms (8.4 cm�s�2).Subjects wore the same type of court shoes (FZ 2600W, FORZA�, Brønderslev, DK) in order to reducethe effects of different footwear on the measurements. The performance of cutting manoeuvres wasalso evaluated by visual inspection. The successful trials were those in which the subjects performedstraight running to approach the force platform, placed the whole foot onto the platform, and wereable to exit the platform in a 90� direction illustrated on the floor. Trials that did not satisfy these threerequirements were excluded from the analysis.
2.3. Data collection
2.3.1. KinematicsRetroreflective spherical markers were placed bilaterally on the skin overlying the following land-
marks: calcaneus, first and fifth metatarso-phalangeal joint, lateral malleolus, lateral condyle; greatertrochanter, anterior superior iliac spine, posterior superior iliac spine and acromion. In addition, onemarker was placed on the seventh cervical vertebrae, upper and lower endpoint of sternum (supra-sternal notch and xiphoid process). Extra markers were placed bilaterally on lower extremity seg-ments: one on the thigh, four on the shank and one on the upper arm, serving as tracking markersto define the three-dimensional (3D) motion. Marker positions were tracked with a motion analysissystem with eight infrared digital video cameras (Oqus 300 series, Qualisys, Gothenburg, Sweden).The kinematic data were recorded with a sampling frequency of 256 Hz and synchronized with theEMG and kinetic recordings. Subjects wore full stretch pants covering the EMG cables to minimizemovement artifacts.
2.3.2. KineticsThe vertical (Fz), anterior-posterior (Fy) and medial-lateral (Fx) ground reaction forces and the
corresponding reaction moments (Mx, My, Mz) were recorded at 1024 Hz by a force platform (AMTI,OR6-5, Watertown, MA) mounted on a hydraulic system (Oliveira, Brito, Farina, & Kersting, 2013; van

A.S.C. Oliveira et al. / Human Movement Science 34 (2014) 128–136 131
Doornik & Sinkjaer, 2007). Software developed on the Labview platform (MrKick II, Aalborg University,Aalborg, Denmark) was used for data recording. Using a feedback electric circuit, the Fz force alsoserved as trigger to initiate the force plate movement.
2.3.3. ElectromyographySurface EMG signals were recorded in bipolar derivations with pairs of Ag/AgCl electrodes (Ambu
Neuroline 720 01-K/12; Ambu, Ballerup, Denmark) with 22 mm of center-to-center spacing. Prior toelectrode placement the skin was shaved and lightly abraded. The EMG signals were amplified witha gain of 2000 (EMG-USB, LISiN; OT Bioelettronica, Turin, Italy), sampled at 2048 Hz (12 bits/sample).A reference electrode was placed on the right wrist. The EMG signals were recorded from the followingmuscles of the right side according to the SENIAM recommendations (Hermens, Freriks, Disselhorst-Klug, & Rau, 2000): tibialis anterior (TA), gastrocnemius medialis (GM), vastus medialis (VM), vastuslateralis (VL), rectus femoris (RF), long head of biceps femoris (BF), semitendinosus (ST), gluteus max-imus (GMA), and rectus abdominis (RAB).
2.4. Data analysis
The body of the subjects was modeled as an interconnected chain of rigid body segments: foot,shank, thigh, pelvis, trunk and arms as described by Andersen, Damsgaard, MacWilliams, and Rasmus-sen (2010). The left initial contact was defined from the foot kinematic data whereas the duration ofthe stance phase for the right leg was determined by the force plate recordings (when the verticalground reaction force exceeded 20 N). The body center of mass and subsequent center of mass velocity(CoMVEL) was calculated prior to landing and during the period of contact to the force platform in theAnyBody Modeling System 5.1 (Anybody Technology, Aalborg, Denmark).
Kinematic data were low-pass filtered (10 Hz, second-order, zero lag Butterworth) and CoMVEL wascomputed between 200 ms and 100 ms prior to right foot contact to the force platform in order todetermine speed prior to landing (SPD1). In addition, CoMVEL was computed from the last 50 ms ofthe stance period to determine take-off speed (SPD2). From kinetic data the vertical peak forces (VTPF)and horizontal peak forces in the anterior-posterior direction (APPF) and medial-lateral direction (LAPF)were also recorded during the first half of stance period and normalized to body mass (N/kg). Un-loaded platform translations were recorded prior to the experiment, in order to calculate the inertialcomponents of the platform movement. These inertial components were subsequently subtractedfrom the generated forces during perturbations. The right heel marker was used in order to calculatethe vertical heel acceleration (HAC), which has been used as predictor of cautiousness during locomo-tion analysis (Beschorner & Cham, 2008; Oliveira et al., 2012).
Concerning surface EMG, the signals were initially band-pass filtered (second-order, zero lag But-terworth, bandwidth 10–500 Hz) and full-wave rectified prior to further processing. For each musclethe maximum EMG during stance from all trials (including Base, Catch and Pert) was used as an indexto normalize across trials. Average EMG amplitude (%maximum) was calculated in three time epochsfor all nine muscles: (1) 10 ms before initial contact (Pre-Activation); (2) from 50 to 150 ms after ini-tial contact, related to load acceptance (LA) and (3) a 50-ms time window around the peak CoM power(Oliveira, Silva, Lund, Kersting, & Farina, 2013) during the propulsion phase of cutting manoeuvres(PRP). In addition, co-contraction ratio (CCR) for the relationship between knee flexors and extensors,and between dorsiflexors and plantarflexors was computed for each of the time epochs (Besier et al.,2003). The CCR for knee joint (KCCR) was defined as the average knee flexors EMG activity ((BF + ST)/2)divided by the knee extensors activity ((VM + VL + RF)/3), whereas the CCR for the ankle joint (ACCR)was defined as the TA EMG divided by GM EMG.
2.5. Statistical analysis
The effects of perturbation on the dependent variables (VTPF, APPF, LAPF, stance duration, SPD1,SPD2, HAC, Average EMG, KCCR and ACCR) were investigated using one-way ANOVA with Bonferroni cor-rection for multiple comparisons. The significance level was set to p < .05.

132 A.S.C. Oliveira et al. / Human Movement Science 34 (2014) 128–136
3. Results
No changes in stance duration, horizontal anterior-posterior and lateral peak forces, CoM speedprior to landing and at exiting the force platform and vertical heel acceleration were found amongBase, Catch and Pert conditions (p > .05, Table 1).
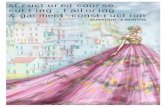
No effect of anticipation was found on the iEMG prior to initial contact (Fig. 1A). On the other hand,in the period between 50 and 150 ms after perturbation there was a substantial increase in TA iEMGfor Catch and Pert conditions (ANOVA p < .001, corrected p < .05, Fig. 1B). In addition, reductions iniEMG for knee extensors (VL, VM and RF) were observed, as well as for Gmax and RAB for Catchand Pert (ANOVA p < .05, corrected p < .05). During PRP, a reduction in the knee extensors iEMG forCatch and Pert was also verified in comparison to Base (p < .05, Fig. 1C).
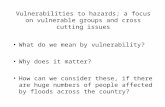
Co-contraction ratios calculated prior to initial contact (CCR-PRE) were not different among Base,Catch and Pert for both ankle and knee joints (p > .05, Fig. 2). For the ankle joint, ACCR from catch trialsand perturbed trials were greater in comparison to Base during LA phase of cutting (ANOVA p < .05,corrected p < .05), with no changes during PRP phase. Concerning the knee joint, KCCR from catch trialswas greater than Base during LA phase of cutting (ANOVA p < .01, corrected p < .05). Moreover, KCCR
from perturbations were greater than Base for both LA and PRP phases of cutting manoeuvres (ANOVAp < .01, corrected p < .05).
4. Discussion
The main finding of the present investigation was that the awareness about possible perturbationsto balance while performing cutting manoeuvres influenced muscle activity in different musculargroups depending on the phase of the movement. Increased co-contraction ratios at the ankle andknee joint were induced by the chance of perturbations, as a protective mechanism to assure joint sta-bility in the early phase of the stance period. These results suggest that awareness about perturbationsto balance during cutting tasks induces changes in the neuromuscular control of the lower limb mus-cles to assure an increased safety margin. In practical terms, the presented results show that the mod-ulation of muscle activity due to expectation of environmental change is also found in sports gestures.
Changes in ground reaction forces, as well as trunk and limb kinematics are expected during walk-ing, if perturbations to balance are experienced (Cappellini et al., 2010; Cham & Redfern, 2002; Heiden,Sanderson, Inglis, & Siegmund, 2006; Marigold & Patla, 2002). These adaptations result from increasedreadiness in case of perturbations to balance, as well as some inability to return to a natural behaviorafter experiencing these perturbations (Reynolds & Bronstein, 2003). Therefore, after experiencingperturbations to balance, adaptations are triggered in subsequent execution of such movements, fora safer completion of the task, which cannot be voluntarily ignored by the subjects (Heiden et al.,2006; Oliveira et al., 2012; Reynolds & Bronstein, 2003). In the present investigation, no changes werefound in kinematic and kinetic variables, which can be partially related to the different motor task(side-step cutting), that is performed at a higher speed and subjects did not report fear of performingthe task during the randomly perturbed trials.
In case of running tasks, no results on anticipatory responses to unpredictable changes in the envi-ronment are available for humans. However, Daley and Biewener (2006) have investigated lower limbstability in guinea fowls while running over rough terrains. It was observed that these animals
Table 1Mean ± standard deviation of stance duration (STC), vertical peak force (VTPF), lateral peak force (LAPF), anterior-posterior peakforce (APPF), center of mass speed prior to landing (SPD1) and at take-off (SPD2) and vertical heel acceleration (HAC) during baselinecutting manoeuvres (Base), catch trials (Catch) and perturbed trials (Pert).
STC (ms) VTPF (N�kg�1) LAPF (N�kg�1) APPF (N�kg�1) SPD1 (m�s�1) SPD2 (m�s�1) HAC (m�s�2)
Base 327.9 ± 53.7 28.1 ± 6.2 6.9 ± 2.0 10.0 ± 3.0 2.1 ± 0.3 0.83 ± 0.1 15.3 ± 7.5Catch 340.4 ± 57.5 29.5 ± 8.6 6.2 ± 2.2 9.5 ± 3.7 2.0 ± 0.5 0.81 ± 0.2 15.6 ± 6.3Pert 333.6 ± 57.8 30.3 ± 7.7 6.9 ± 2.3 11.0 ± 4.3 2.1 ± 0.4 0.83 ± 0.1 16.6 ± 6.2

0
20
40
60
80
TA GM VM VL RF BF ST GMAX RAB
0
20
40
60
80
TA GM VM VL RF BF ST GMAX RAB
0
20
40
60
80
TA GM VM VL RF BF ST GMAX RAB
Base Catch Pert
iEM
G (%
max
)iE
MG
(%m
ax)
iEM
G (%
max
)
A − Pre-activation
B − Load absorption
C − Propulsion
*
* * * *
*
* * *
Fig. 1. Mean (SD) integral EMG (iEMG) calculated for the time window 10 ms prior to initial contact (A), from 50 ms to 150 msafter initial contact (B) and during propulsion phase of cutting manoeuvres (C). Baseline trials were performed in the beginningof the protocol (white bars), subsequently the subjects were informed that the next set of trials could present perturbations tobalance. Some trials were not perturbed (gray bars) while some other trials had perturbations elicited at initial contact (blackbars). ⁄ Denotes significant difference in relation to Catch and Pert (p < .05).
A.S.C. Oliveira et al. / Human Movement Science 34 (2014) 128–136 133
adapted limb contact angle, reduced ground reaction forces and stride length while running over low-friction surface for these animals for safety reinforcement (Clark & Higham, 2011). The changes inmuscle recruitment for safety reinforcement during side-cutting manoeuvres, such as increasedCCR, were present whether perturbations occurred or not, as previously verified in human and animal

0.0
1.0
2.0
3.0
4.0
5.0
CCR-PRE CCR-LA CCR-PRP
0.0
0.5
1.0
1.5
2.0
2.5
3.0
CCR-PRE CCR-LA CCR-PRP
Base Catch Pert
* *
CC
R (%
max
)
Ankle Co-contraction ratio
*
Knee Co-contraction ratio
CC
R (%
max
)
* *
Fig. 2. Mean (SD) co-contraction ratio calculated for the time window 10 ms prior to initial contact (CCR-PRE), from 50 ms to150 ms after initial contact (CCR-LA) and during propulsion phase of cutting manoeuvres (CCR-PRP). Co-contraction ratios werecalculated during baseline cutting trials (Base), catch trials (Catch) and perturbed trials (Pert). ⁄ Denotes significant difference inrelation to Base (p < .05).
134 A.S.C. Oliveira et al. / Human Movement Science 34 (2014) 128–136
locomotion (Clark & Higham, 2011; Heiden et al., 2006). Therefore, the present results corroborate theassumption that pre-established biomechanical experiences of perturbations are used when perturba-tions are expected/anticipated, as it was the case in this experiment for both catch and perturbedtrials.
Despite similar ground reaction forces and body displacement, the knowledge that the platformcould move during cutting trials made subjects in the present study to adapt their neuromuscularbehavior immediately. Muscular activity was changed, especially for the quadriceps muscle groupduring the stance phase, consequently increasing KCCR and potentially enhancing the stability marginsfor the knee joint in case of perturbations. In a recent study, we observed that fully unexpected per-turbations to balance while performing cutting manoeuvres may reduce hamstrings activity duringLA, and therefore the knee joint may present reduced protection from neuromuscular mechanisms(Oliveira, Silva, Lund, Gizzi, et al., 2013). The results of the present investigation demonstrate thatin the case of anticipation of perturbations, there is no such reduction in case of similar perturbations,suggesting that it is possible to counteract the effects of these perturbations based on previous knowl-edge. Further investigations are needed to demonstrate the effects of interventions that enhance pos-tural responses, such as balance training, on the reactive recovery of balance following perturbationsduring sports gestures.
Increased activation of the TA muscle early in the stance phase of cutting manoeuvres could con-tribute to increase stability at the ankle joint (Neptune, Wright, & Van den Bogert, 1999), being anessential protective adaptation to the expected slips (Eils & Rosenbaum, 2001; Holmes & Delahunt,2009; Oliveira, Silva, Farina, & Kersting, 2013). This increased stability at the ankle joint could be fur-ther confirmed by the ACCR during LA phase. A higher stiffness at the ankle joint during catch and per-turbed trials may protect the joint against harmful torques that eventually cause injuries in more

A.S.C. Oliveira et al. / Human Movement Science 34 (2014) 128–136 135
dangerous perturbed situations. In the same way, reduced EMG activity for the right GMAX and RABmuscles could be associated to specific strategies to diminish muscle power and assure safer comple-tion of the task.
The results from the present investigation point out that expectation/anticipation of slips or pertur-bations during ground contact also modulate neural control during non-linear locomotor task. It iswell known that intrinsic mechanisms may regulate biomechanical output when perturbations to bal-ance are expected. Increased responsiveness from sensory receptors certainly play an essential role inaltering gait patterns in this case (Cappellini et al., 2010). Therefore, the experience of perturbationswhile performing cutting manoeuvres may elicit similar responses when compared to normal gaitin which neural adjustments are required to modulate muscle recruitment.
In conclusion, the expectation of perturbations to balance while performing cutting manoeuvreselicits changes in neuromuscular control that are extended to both perturbed and unperturbed condi-tions. The neuromuscular strategies to avoid loss of balance during cutting manoeuvres might origi-nate from common pathways as in steady walking, reinforcing the concept of in-built programsthat modulate muscle actions to assure safety.
References
Alentorn-Geli, E., Myer, G. D., Silvers, H. J., Samitier, G., Romero, D., Lázaro-Haro, C., et al (2009). Prevention of non-contactanterior cruciate ligament injuries in soccer players. part 1: Mechanisms of injury and underlying risk factors. Knee Surgery,Sports Traumatology, Arthroscopy, 17, 705–729.
Andersen, M. S., Damsgaard, M., MacWilliams, B., & Rasmussen, J. (2010). A computationally efficient optimisation-basedmethod for parameter identification of kinematically determinate and over-determinate biomechanical systems. ComputerMethods in Biomechanics and Biomedical Engineering, 13, 171–183.
Beschorner, K., & Cham, R. (2008). Impact of joint torques on heel acceleration at heel contact, a contributor to slips and falls.Ergonomics, 51, 1799–1813.
Besier, T. F., Lloyd, D. G., & Ackland, T. R. (2003). Muscle activation strategies at the knee during running and cutting maneuvers.Medicine and Science in Sports and Exercise, 35, 119–127.
Bunday, K., Reynolds, R., Kaski, D., Rao, M., Salman, S., & Bronstein, A. (2006). The effect of trial number on the emergence of the‘broken escalator’ locomotor aftereffect. Experimental Brain Research, 174, 270–278.
Cappellini, G., Ivanenko, Y. P., Dominici, N., Poppele, R. E., & Lacquaniti, F. (2010). Motor patterns during walking on a slipperywalkway. Journal of Neurophysiology, 103, 746–760.
Cham, R., & Redfern, M. S. (2002). Changes in gait when anticipating slippery floors. Gait & Posture, 15, 159–171.Clark, A. J., & Higham, T. E. (2011). Slipping, sliding and stability: Locomotor strategies for overcoming low-friction surfaces.
Journal of Experimental Biology, 214, 1369–1378.Daley, M. A., & Biewener, A. A. (2006). Running over rough terrain reveals limb control for intrinsic stability. Proceedings of the
National Academy of Sciences of the United States of America, 103, 15681–15686.Drakos, M. C., Hillstrom, H., Voos, J. E., Miller, A. N., Kraszewski, A. P., & Wickiewicz, T. L. (2010). The effect of the shoe-surface
interface in the development of anterior cruciate ligament strain. Journal of Biomechanical Engineering, 132, 1–7 (011003.1–011003.7).
Duysens, J., Beerepoot, V. P., Veltink, P. H., Weerdesteyn, V., & Smits-Engelsman, B. C. (2008). Proprioceptive perturbations ofstability during gait. Neurophysiologie Clinique = Clinical Neurophysiology, 38, 399–410.
Eils, E., & Rosenbaum, D. (2001). A multi-station proprioceptive exercise program in patients with ankle instability. Medicine andScience in Sports and Exercise, 33, 1991.
Heiden, T. L., Sanderson, D. J., Inglis, J. T., & Siegmund, G. P. (2006). Adaptations to normal human gait on potentially slipperysurfaces: The effects of awareness and prior slip experience. Gait & Posture, 24, 237–246.
Hermens, H. J., Freriks, B., Disselhorst-Klug, C., & Rau, G. (2000). Development of recommendations for SEMG sensors and sensorplacement procedures. Journal of Electromyography and Kinesiology, 10, 361–374.
Holmes, A., & Delahunt, E. (2009). Treatment of common deficits associated with chronic ankle instability. Sports Medicine, 39,207–224.
Lacquaniti, F., Ivanenko, Y. P., & Zago, M. (2012). Patterned control of human locomotion. The Journal of Physiology, 590,2189–2199.
Marigold, D. S., & Patla, A. E. (2002). Strategies for dynamic stability during locomotion on a slippery surface: Effects of priorexperience and knowledge. Journal of Neurophysiology, 88, 339–353.
Neptune, R. R., Wright, I. A. N. C., & Van den Bogert, A. J. (1999). Muscle coordination and function during cutting movements.Medicine and Science in Sports and Exercise, 31, 294–302.
Oliveira, A. S., Brito, Silva P., Farina, D., & Kersting, U. G. (2013). Unilateral balance training enhances neuromuscular reactions toperturbations in the trained and contralateral limb. Gait & Posture, 38, 894–899.
Oliveira, A. S., Farina, D., & Kersting, U. (2012). Biomechanical strategies to accommodate expected slips in different directionsduring walking. Gait & Posture, 36, 301–306.
Oliveira, A. S., Silva, P. B., Lund, M. E., Gizzi, L., Farina, D., & Kersting, U. G. (2013). Effects of perturbations to balance onneuromechanics of fast changes in direction during locomotion. PLoS One, 8, e59029.
Oliveira, A. S., Silva, P. B., Lund, M. E., Kersting, U. G., & Farina, D. (2013). Fast changes in direction during human locomotion areexecuted by impulsive activation of motor modules. Neuroscience, 228, 283–293.

136 A.S.C. Oliveira et al. / Human Movement Science 34 (2014) 128–136
Parijat, P., & Lockhart, T. E. (2011). Effects of moveable platform training in preventing slip-induced falls in older adults. Annalsof Biomedical Engineering, 40, 1111–1121.
Reynolds, R., & Bronstein, A. (2003). The broken escalator phenomenon. Experimental Brain Research, 151, 301–308.Rossignol, S., Dubuc, R., & Gossard, J. P. (2006). Dynamic sensorimotor interactions in locomotion. Physiological Reviews, 86,
89–154.van Doornik, J., & Sinkjaer, T. (2007). Robotic platform for human gait analysis. IEEE Transactions On Bio-Medical Engineering, 54,
1696–1702.Zebis, M. K., Andersen, L. L., Bencke, J., Kjær, M., & Aagaard, P. (2009). Identification of athletes at future risk of anterior cruciate
ligament ruptures by neuromuscular screening. The American Journal of Sports Medicine, 37, 1967–1973.