
Modified Bilhaut-Cloquet Procedure for Wassel Type-II and III ...
Survey Review
Search procedure for improving Modified Ambiguity Function Approach--Manuscript Draft--
Manuscript Number: SRE102
Full Title: Search procedure for improving Modified Ambiguity Function Approach
Article Type: Research Paper
Section/Category: Refereed paper
Keywords: GNSS data processing, Ambiguity Function, MAFA method
Corresponding Author: Slawomir Cellmer
POLAND
Corresponding Author SecondaryInformation:
Corresponding Author's Institution:
Corresponding Author's SecondaryInstitution:
First Author: Slawomir Cellmer
First Author Secondary Information:
Order of Authors: Slawomir Cellmer
Order of Authors Secondary Information:
Abstract: The Modified Ambiguity Function Approach (MAFA) is a method of GNSS carrierphase data processing. In this method, the functional model of the adjustment problemcontains the conditions ensuring the "integerness" of the ambiguities. These conditionsare expressed in the form of differentiable function. A prerequisite for obtaining thecorrect solution is a mechanism ensuring not only the "integerness" of the ambiguitiesbut also appropriate convergence of the computational process. One of suchmechanisms is a cascade adjustment, applying the linear combinations of the L1 andL2 signals with the integer coefficients and various wavelengths. Another method ofincreasing the efficiency of the MAFA method is based on the application of the integerdecorrelation matrix to transform observation equations into equivalent, but betterconditioned, observation equations. This paper presents the search procedure as thenext technique of improving the MAFA method. This technique together with thedecorrelation procedure allows to reduce the number of stages of the cascadeadjustment and to obtain correct solution even in the case when a priori position is afew meters away from the actual position. In this paper an example of data processingusing the proposed algorithm is given. The results of numerical tests based on realdata are presented.
Powered by Editorial Manager® and Preprint Manager® from Aries Systems Corporation

Search procedure for improving Modified Ambiguity Function Approach
Slawomir Cellmer
University of Warmia and Mazury in Olsztyn, Poland
email: [email protected]
ABSTRACT
The Modified Ambiguity Function Approach (MAFA) is a method of GNSS carrier phase data
processing. In this method, the functional model of the adjustment problem contains the conditions
ensuring the "integerness" of the ambiguities. These conditions are expressed in the form of
differentiable function. A prerequisite for obtaining the correct solution is a mechanism ensuring not
only the "integerness" of the ambiguities but also appropriate convergence of the computational
process. One of such mechanisms is a cascade adjustment, applying the linear combinations of the L1
and L2 signals with the integer coefficients and various wavelengths. Another method of increasing
the efficiency of the MAFA method is based on the application of the integer decorrelation matrix to
transform observation equations into equivalent, but better conditioned, observation equations. This
paper presents the search procedure as the next technique of improving the MAFA method. This
technique together with the decorrelation procedure allows to reduce the number of stages of the
cascade adjustment and to obtain correct solution even in the case when a priori position is a few
meters away from the actual position. In this paper an example of data processing using the proposed
algorithm is given. The results of numerical tests based on real data are presented.
KEY WORDS: GNSS data processing, Ambiguity Function, MAFA method.
INTRODUCTION
The MAFA method is based on the least squares adjustment (LSA) with condition
equations in the functional model of the adjustment problem [2],[3],[4],[5]. This
ensures that the condition of the ambiguity „integerness‖ is satisfied in the final
results. The functional model for the carrier phase adjustment is relatively weak.
Therefore different linear combinations (LC) of L1 and L2 GPS carrier phase
observations are applied in the cascade adjustment so that the appropriate
convergence of the computational process can be assured [9],[12]. Another method
of improving the efficiency of the MAFA method was proposed by Cellmer [3],[4].
This technique exploits an integer decorrelation procedure. After transformation of
the observation equations with an integer decorrelation matrix, a model of an
adjustment problem turns into an equivalent model, but a better conditioned one.
There are some limitations in applying the MAFA method. Cellmer [3] derived the
necessary condition for obtaining correct solution with MAFA method. This
condition is associated with the accuracy of the a priori position and the wavelength
of LC forming an observation set. The a priori position must be placed inside a
certain region around the actual position. Therefore the approximate position in
carrier phase process should be as good as possible. The accuracy of the approximate
position can be increased using Network Code DGPS Positioning [1]. However this
accuracy can be still insufficient for MAFA method, even if the decorrelation
procedure and the cascade adjustment are applied. Therefore, in this paper, the search
procedure is proposed, as the technique of overcoming this problem. This procedure
is based on testing the objective function values for different vectors of misclosures
in the functional model of the adjustment problem. The misclosures vector is
described in details in section 3. This procedure allows obtaining correct solution,
even if the a priori position is a few meters away from the actual position. The next
ManuscriptClick here to download Manuscript: cellmer_paper1.docx
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
section presents the theoretical basis of the MAFA method followed by the
description of the techniques improving its efficiency. In the third section the search
procedure is presented. In the last part of the paper a numerical example, the results
of the tests and some conclusions are given.
MAFA METHOD
The following simplified form of the observation equation for double differenced
(DD) carrier phase observable is assumed, [11],[13],[16]:
, (1)
where:
– DD carrier phase observable (in cycles)
– signal wavelength
v – residual (measurement noise)
Xc – receiver coordinate vector
(Xc) – DD geometrical range
N – integer number of cycles (DD initial ambiguity)
Then taking into account the integer nature of the ambiguity parameter N and
assuming that the residual values are much lower than half a cycle, [2],[11], the Eq.
(1) can be rewritten in the following form:
(2)
or
, (3)
where round is a function of rounding to the nearest integer value. The residual (3)
takes into account the integer nature of ambiguities. The right side of the Eq. (3) can
be expressed in the form of the following, differentiable and continuous function,
[4],[5]:
, (4)
where s is an auxiliary variable:
. (5)
Each of the DD carrier phase observations is linearized. After linearization, the
general formula of the residual equations can be shown in the following form:
V= AX+, (6)
with:
(7)
1cλ
Φ+v= ρ X N
1 1λ λ
Φ+v- ρ=round Φ- ρ
1 1λ λ
v=round Φ- ρ Φ- ρ
1arcsin[sin( s)]for s s : cos( s) 0
round(s) s1
arcsin[sin( s)]for s s : cos( s) 0
1s
1 1 1
2 2 2
n n n
x y z
x y z
x y z
A
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
(8)
where:
V – residual vector (n×1),
X – parameter vector (increments to a priori coordinates vector X0),
A – design matrix (n×3),
∆ – misclosures vector (n ×1),
0 – DD geometric distance vector computed using a priori position and
satellite coordinates.
The LS solution of the formula (6) is:
X = -(ATPA)
-1A
TP, (9)
with P standing for the weight matrix.
In order to assure the convergence of the computational process to the correct
solution, in classic form of MAFA method, three linear combinations (LC) of L1 and
L2 GPS carrier phase observables with integer ambiguities and longer wavelengths
are applied in the cascade adjustment [2]. The computations are performed
successively for three LC, starting from -3L1+4L2 followed by L1-L2 and finishing
with L1 signal only. The efficiency of the MAFA method can be also improved using
the decorrelation procedure. The ambiguities (N) are usually strongly correlated.
Hence, fixing one value of ambiguity through rounding value s in (5) to the nearest
integer as in (2), has an impact on the rest of the ambiguities. Therefore, the
correlation between ambiguities should be taken into account at rounding the right
side of the Eq. (2) or alternatively the observation equations should be transformed
into the equivalent form with decorrelated ambiguities.
Let us assume that Z is the integer decorrelation matrix [14], [15]:
QNz = ZQNZT, (10)
where:
QN – ambiguity covariance matrix
QNz – diagonal transformed ambiguity covariance matrix.
By multiplying Eq. 1 with Z, one can obtain a new equation with a new integer
ambiguity vector Nz:
. (11)
The above formula can replace Eq. (1). Further considerations are the same but
decorrelated observation Eq. (11) in the place of Eq. (1) increases the probability of
obtaining the correct solution. The subsequent part of the computation process results
from this equation. There are many various methods of finding the Z decorrelation
matrix [10],[14],[18]. In order to find the Z matrix, the ambiguity covariance matrix
(QN) is required. This matrix can be evaluated on the basis of the system of
observation equations (1) after linearization:
V=AX+BN–L, (12)
where:
L – misclosures (observed minus computed) vector
B – ambiguity functional model matrix
1 1
0 0round
1Z CZ ZZ
V (X ) N
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
The covariance matrix of the unknown vector X =[X, N]T
can be presented as:
, (13)
where:
. (14)
In the case of the single epoch data, B is an identity matrix and the matrix
inside brackets is not positive definite. Hence the matrix QN cannot be computed
using the formula (14). Therefore, an additional coefficient k is imposed, [2],[4],[6]:
. (15)
The use of the coefficient k is equivalent to the simulation of additional observations,
e.g. code observations, as in the generalized least squares model presented in [17].
The matrix QNk can be applied to the decorrelation procedure as an approximation of
the ambiguity covariance matrix.
SEARCH PROCEDURE IN MAFA METHOD
In [5] the necessary condition for applying MAFA method was described. This
condition can be formulated as follows:
(16)
where:
N – true ambiguity
0 – DD geometric distance computed using a priori position coordinates.
If the above condition is not satisfied then the observation equation (2) takes the
following form:
(17)
with integer Ne.
Hence in place of eq. (3) and (4) are adequately:
(18)
and
. (19)
Based on linearization of the function e, the observation equation (6) is rewritten as
follows:
V= AX+e, (20)
with the new misclosures vector:
. (21)
1T T
X XNx T T
NX N
Q QA PA A PBC
Q QB PA B PB
1
1T T T T
NQ B PB B PA A PA A PB
1
1T T
NkQ P kPA A PA A P
10λ
N=round Φ- ρ
1 1eλ λ
+v- ρ=round Φ- ρ N
1 1e eλ λ
v =round Φ- ρ Φ- ρ N
e
e e
e
1arcsin[sin( s)] N for s s : cos( s) 0
round(s) s N1
arcsin[sin( s)] N for s s : cos( s) 0
1 1e eλ λ=round Φ- ρ Φ- ρ N
0 0
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
Due to the integer values of the vector Ne the search procedure is necessary. The
search procedure will consist of testing the values of the objective function VTPV for
different vectors Ne. It is proposed here that the vector Ne will consist only of the
following values -1, 0 and 1. This assumption significantly reduces of the search
region. It is justified when the derivation was preceded with the decorrelation
procedure described above. All possible vectors Ne can be represented by column
vectors ei forming matrix E. The vectors ei consists of the elements -1, 0 or 1 in all
possible combinations. Generally the matrix E can be formed using the following
recursive formula:
, (22)
where:
– k-element row vector of ones
– Kronecker product symbol
n – number of ambiguities.
The dimension of matrix E is nm with the number of columns:
m=3n . (23)
The example of the matrix E for n=3 is:
(24)
Each column of the E matrix is substituted into (21) for Ne and the criteria
VTPV=min is tested. The value of ei minimizing V
TPV is chosen to final positioning
according to formula (9). Delta expression in this equation is calculated by (21) and
contains the optimal value of Ne from the search procedure. Summarizing, the search
procedure is based on the misclosure vector modifications followed by the test of the
objective function value. The misclosures vector consists of the actual measurements
minus predicted measurements. In consecutive tests, the different values of the
predicted measurements are substituted taking into account the integer nature of the
ambiguities. As it was mentioned in section 2, in classic form of the MAFA method,
the three stage cascade adjustment is applied. However due to the search procedure
the efficiency is increased and therefore the cascade process can be limited to two
stages: only widelane L1-L2 and single L1observations are employed in the cascade
adjustment (definitely both observation sets consist of double differenced
observations). The MAFA method together with the search procedure can be used for
processing of the short sessions or even for processing of the observations obtained
from a single-epoch.
The processing algorithm in this case will consist of the following stages:
a priori position determination (e.g. using code observations)
forming double difference of L1, L2, geometric ranges, model matrix A and
weight matrix P
decorrelation procedure
search procedure
n 1
1
11 3
n
n 11 3
E = -1 0 1
E 1
E =1 E
1 k
1
3
-1 -1 -1 -1 -1 -1 -1 -1 -1 0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1
E -1 -1 -1 0 0 0 1 1 1 -1 -1 -1 0 0 0 1 1 1 -1 -1 -1 0 0 0 1 1 1
-1 0 1 -1 0 1 -1 0 1 -1 0 1 -1
0 1 -1 0 1 -1 0 1 -1 0 1 -1 0 1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
final position determination (vector of the coordinates)
Two last stages are repeated two times (once for L1-L2 and once for L1). The
solution obtained from L1 is assumed as the final position.
NUMERICAL EXAMPLE
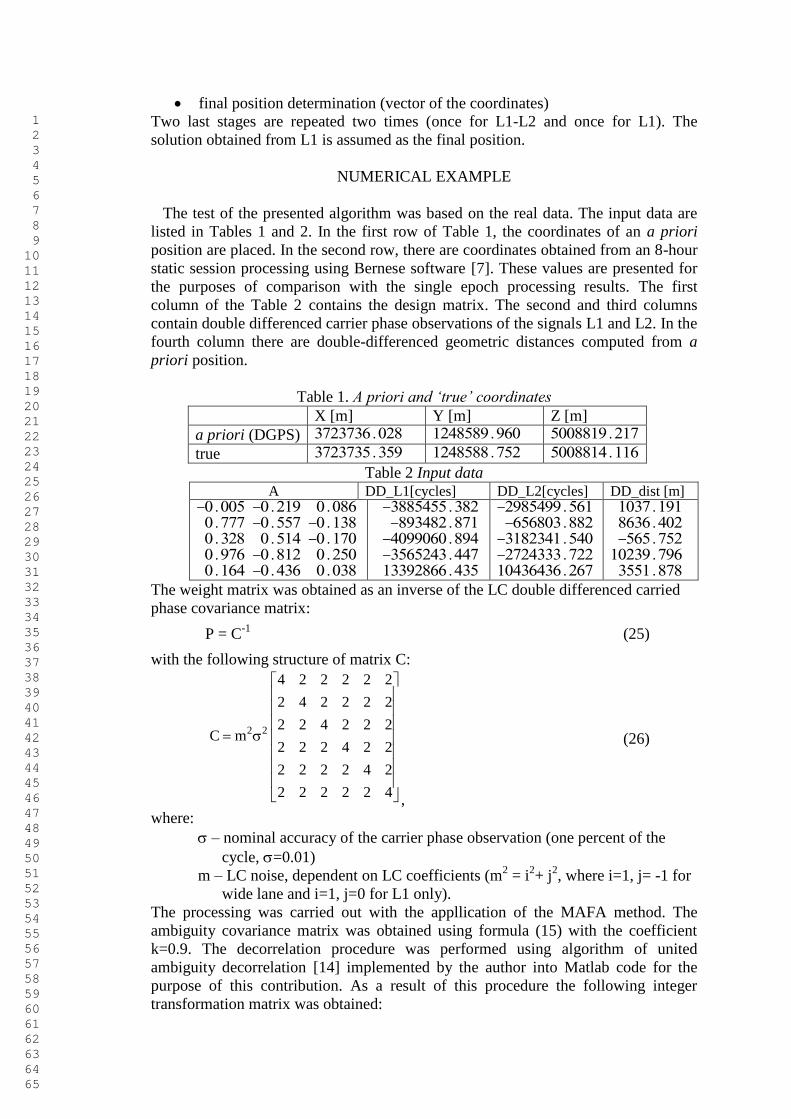
The test of the presented algorithm was based on the real data. The input data are
listed in Tables 1 and 2. In the first row of Table 1, the coordinates of an a priori
position are placed. In the second row, there are coordinates obtained from an 8-hour
static session processing using Bernese software [7]. These values are presented for
the purposes of comparison with the single epoch processing results. The first
column of the Table 2 contains the design matrix. The second and third columns
contain double differenced carrier phase observations of the signals L1 and L2. In the
fourth column there are double-differenced geometric distances computed from a
priori position.
Table 1. A priori and ‘true’ coordinates
X [m] Y [m] Z [m]
a priori (DGPS)
true
Table 2 Input data
A DD_L1[cycles] DD_L2[cycles] DD_dist [m]
The weight matrix was obtained as an inverse of the LC double differenced carried
phase covariance matrix:
P = C-1
(25)
with the following structure of matrix C:
,
(26)
where:
– nominal accuracy of the carrier phase observation (one percent of the
cycle, =0.01)
m – LC noise, dependent on LC coefficients (m2 = i
2+ j
2, where i=1, j= -1 for
wide lane and i=1, j=0 for L1 only).
The processing was carried out with the appllication of the MAFA method. The
ambiguity covariance matrix was obtained using formula (15) with the coefficient
k=0.9. The decorrelation procedure was performed using algorithm of united
ambiguity decorrelation [14] implemented by the author into Matlab code for the
purpose of this contribution. As a result of this procedure the following integer
transformation matrix was obtained:
2 2
4 2 2 2 2 2
2 4 2 2 2 2
2 2 4 2 2 2C m
2 2 2 4 2 2
2 2 2 2 4 2
2 2 2 2 2 4
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
(27)
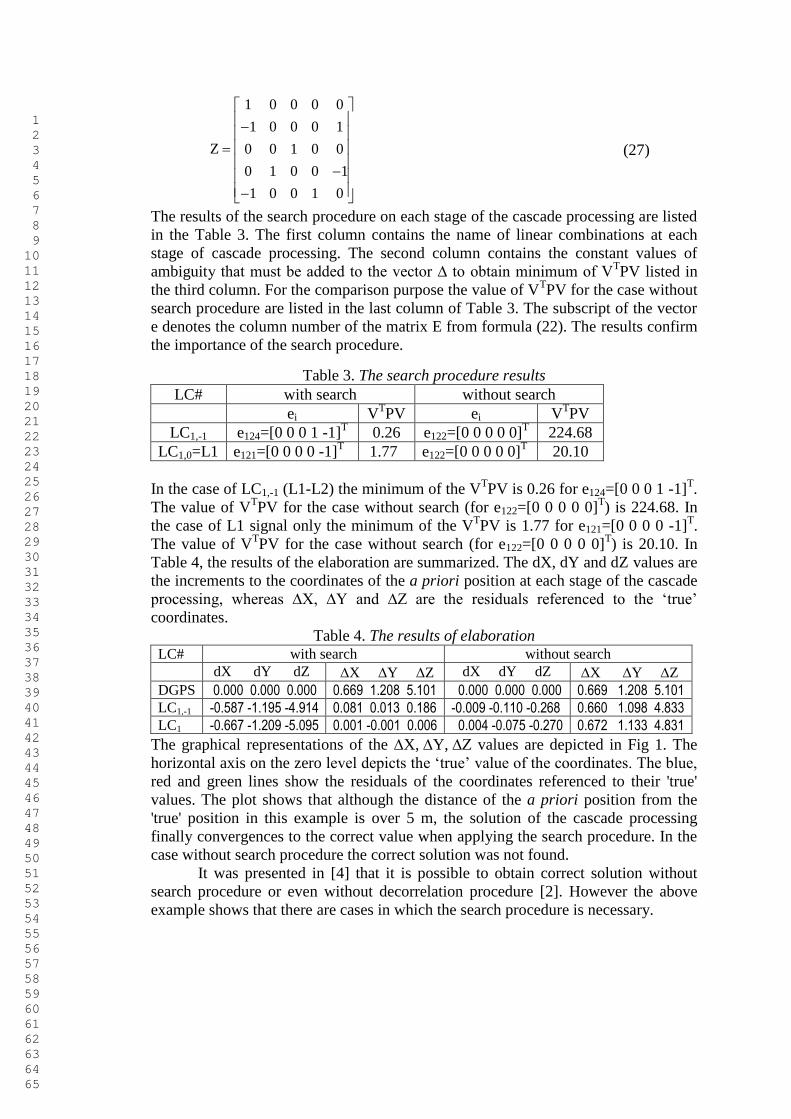
The results of the search procedure on each stage of the cascade processing are listed
in the Table 3. The first column contains the name of linear combinations at each
stage of cascade processing. The second column contains the constant values of
ambiguity that must be added to the vector ∆ to obtain minimum of VTPV listed in
the third column. For the comparison purpose the value of VTPV for the case without
search procedure are listed in the last column of Table 3. The subscript of the vector
e denotes the column number of the matrix E from formula (22). The results confirm
the importance of the search procedure.
Table 3. The search procedure results
LC# with search without search
ei VTPV ei V
TPV
LC1,-1 e124=[0 0 0 1 -1]T 0.26 e122=[0 0 0 0 0]
T 224.68
LC1,0=L1 e121=[0 0 0 0 -1]T 1.77 e122=[0 0 0 0 0]
T 20.10
In the case of LC1,-1 (L1-L2) the minimum of the VTPV is 0.26 for e124=[0 0 0 1 -1]
T.
The value of VTPV for the case without search (for e122=[0 0 0 0 0]
T) is 224.68. In
the case of L1 signal only the minimum of the VTPV is 1.77 for e121=[0 0 0 0 -1]
T.
The value of VTPV for the case without search (for e122=[0 0 0 0 0]
T) is 20.10. In
Table 4, the results of the elaboration are summarized. The dX, dY and dZ values are
the increments to the coordinates of the a priori position at each stage of the cascade
processing, whereas ∆X, ∆Y and ∆Z are the residuals referenced to the ‗true‘
coordinates.
Table 4. The results of elaboration
LC# with search without search
dX dY dZ X Y Z dX dY dZ X Y Z
DGPS 0.000 0.000 0.000 0.669 1.208 5.101 0.000 0.000 0.000 0.669 1.208 5.101
LC1,-1 -0.587 -1.195 -4.914 0.081 0.013 0.186 -0.009 -0.110 -0.268 0.660 1.098 4.833
LC1 -0.667 -1.209 -5.095 0.001 -0.001 0.006 0.004 -0.075 -0.270 0.672 1.133 4.831
The graphical representations of the X,Y, values are depicted in Fig 1. The
horizontal axis on the zero level depicts the ‗true‘ value of the coordinates. The blue,
red and green lines show the residuals of the coordinates referenced to their 'true'
values. The plot shows that although the distance of the a priori position from the
'true' position in this example is over 5 m, the solution of the cascade processing
finally convergences to the correct value when applying the search procedure. In the
case without search procedure the correct solution was not found.
It was presented in [4] that it is possible to obtain correct solution without
search procedure or even without decorrelation procedure [2]. However the above
example shows that there are cases in which the search procedure is necessary.
1 0 0 0 0
1 0 0 0 1
Z 0 0 1 0 0
0 1 0 0 1
1 0 0 1 0
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65

with search without search
Fig. 1. Residuals of the position coordinates referenced to their ‗true‘ values
TESTS
In order to test the efficiency of the proposed algorithm, the real GPS data of three
baselines were used. Test surveys were performed on December 9th, 2008, on 1.5
km, 9.5 km and 29.1 km baselines, the data were collected with a 30-second
sampling rate. Data sets of each baseline consisted of 120 epochs. The data were
processed according to the proposed approach independently for each epoch. The
ambiguity covariance matrix was formed according to formula (15), as a basis for the
decorrelation procedure. The ―true‖ coordinates were derived using Bernese software
based on an 8-hour data set. Figures 2, 3 and 4 present the results of 120 single epoch
sessions processing the 1.5 km, 9.5 km and 29.1 km baselines. The blue lines depict
the linear residuals of the position obtained from single epoch processing, with
respect to the ―true‖ position from Bernese. The residuals were computed as:
, where ∆X, ∆Y and ∆Z are components of the residuals with
respect to the ―true‖ position. The red lines depict the linear residuals of the a priori
position, with respect to the ―true‖ position.
Fig. 2. Linear residuals of the a priori and final position for baseline 1.5 km
DGPS L1-L2 L10
1
2
3
4
5
X
Y
Z
Residuals of the position coordinates referenced to their 'true' values
X
Y
Z
DGPS L1-L2 L10
1
2
3
4
5
X
Y
Z
Residuals of the position coordinates referenced to their 'true' values
X
Y
Z
2 2 2dV X Y Z
10 20 30 40 50 60 70 80 90 100 110 120-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
baseline 1.5 km
epoch
Vd [m
]
linear disclosure of the final position
linear disclosure of the a'priori position
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
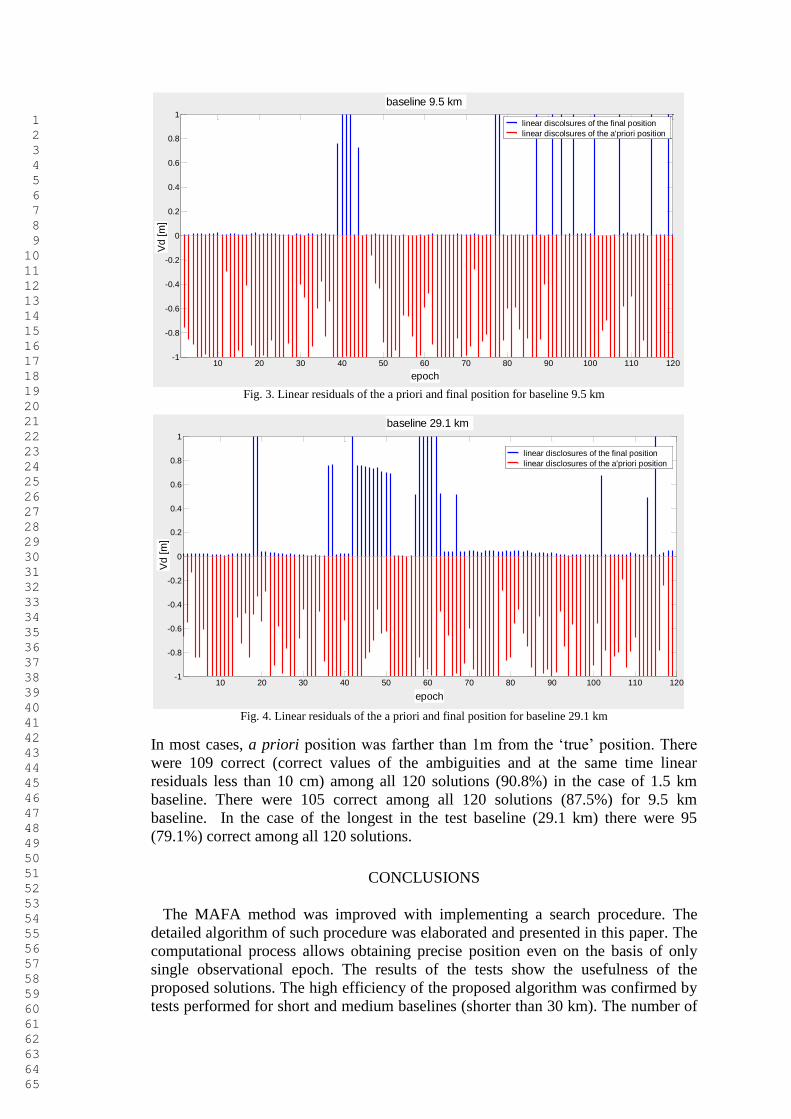
Fig. 3. Linear residuals of the a priori and final position for baseline 9.5 km
Fig. 4. Linear residuals of the a priori and final position for baseline 29.1 km
In most cases, a priori position was farther than 1m from the ‗true‘ position. There
were 109 correct (correct values of the ambiguities and at the same time linear
residuals less than 10 cm) among all 120 solutions (90.8%) in the case of 1.5 km
baseline. There were 105 correct among all 120 solutions (87.5%) for 9.5 km
baseline. In the case of the longest in the test baseline (29.1 km) there were 95
(79.1%) correct among all 120 solutions.
CONCLUSIONS
The MAFA method was improved with implementing a search procedure. The
detailed algorithm of such procedure was elaborated and presented in this paper. The
computational process allows obtaining precise position even on the basis of only
single observational epoch. The results of the tests show the usefulness of the
proposed solutions. The high efficiency of the proposed algorithm was confirmed by
tests performed for short and medium baselines (shorter than 30 km). The number of
10 20 30 40 50 60 70 80 90 100 110 120-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
epoch
Vd [m
]
baseline 9.5 km
linear discolsures of the final position
linear discolsures of the a'priori position
10 20 30 40 50 60 70 80 90 100 110 120-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
epoch
Vd [m
]
baseline 29.1 km
linear disclosures of the final position
linear disclosures of the a'priori position
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
correct single-epoch solutions varied from 79% to over 90% depending on the
baseline length. Future research will include application of the presented
methodology to multi-station positioning, as literature suggest [8] that this may
further increase success rate of the single epoch solutions.
References
1. Bakuła M., 2010. Network Code DGPS Positioning and Reliable Estimation of
Position Accuracy, Survey Review, 42 (315): 82-91.
2. Cellmer S., Wielgosz P., Rzepecka Z., 2010. Modified ambiguity function
approach for GPS carrier phase positioning, Journal of Geodesy, Vol. 84, 264-275.
3. Cellmer S., 2011a. The real time precise positioning using MAFA method, The 8th
International Conference ENVIRONMENTAL ENGINEERING, selected papers, Vol.
III, Vilnius, 1310-1314.
4. Cellmer S., 2011b. Using the Integer Decorrelation Procedure to increase of the
efficiency of the MAFA Method, Artificial Satellites, Vol. 46, No. 3, 103-110.
5. Cellmer S., 2011c. A Graphic Representation of the Necessary Condition for the
MAFA Method. Transactions on Geoscience and Remote Sensing vol. 50 Issue 2, pp.
482 - 488
6. Cellmer S., 2012. On-the-fly ambiguity resolution using an estimator of the
modified ambiguity covariance matrix for the GNSS positioning model based on
phase data Artificial Satellites (accepted for publication)
7. Dach R., Hugentobler U., Fridez P., Meindl M., 2007. BERNESE GPS Software
Version 5.0., Astronomical Institute, University of Berne
8. Grejner-Brzezinska D.A., Arlsan N., Wielgosz P., Hong C.-K., 2009. Network
Calibration for Unfavorable Reference-Rover Geometry in Network-Based RTK:
Ohio CORS Case Study, Journal of Surveying Engineering, Vol. 135, Issue 3, pp.
90-100
9. Han S. and Rizos C., 1996. Improving the computational efficiency of the
ambiguity function algorithm. Journal of Geodesy 1996, Vol. 70, No. 6, 330-341.
10. Hassibi A, Boyd S., 1998. Integer parameter estimation in linear models with
applications to GPS. IEEE Trans Signal Proc 46: 2938–2952
11. Hofmann-Wellenhof B, Lichtenegger H, Wasle E., 2008. GNSS-Global
Navigation Satellite Systems - GPS, GLONASS, Galileo & more, Springer-Verlag
Wien
12. Jung J. and Enge P., 2000. Optimization of Cascade Integer Resolution with
Three Civil GPS Frequencies Proc. ION GPS’2000, Salt Lake City, September 2000
13. Leick A., 2004. GPS Satellite Surveying. 3rd
edition, John Wiley and Sons, Inc.
14. Liu LT., Hsu HT., Zhu YZ., Ou JK., 1999. A new approach to GPS ambiguity
decorrelation. Journal of Geodesy 73:478–490
15. Teunissen P JG., 1995. The least-squares ambiguity decorrelation adjustment: a
method for fast GPS integer ambiguity estimation, Journal of Geodesy , 1995, Vol.
70, 65-82.
16. Teunissen PJG. and Kleusberg A., 1998. GPS for Geodesy, Springer — Verlag,
Berlin Heidelberg New York, 1998
17. Wielgosz P., 2011. Quality assessment of GPS rapid static positioning with
weighted ionospheric parameters in generalized least squares, GPS Solutions Vol. 15,
Issue 2, April 2011, 89-99
18. Xu P., 2001. Random simulation and GPS decorrelation. Journal of Geodesy
75:408–423
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
Copyright © 2022 FDOKUMEN




















