SAFETY CENTRIC SERVICES IN SMART CITIES By YAWEI PANG ...
95
SAFETY CENTRIC SERVICES IN SMART CITIES By YAWEI PANG A DISSERTATION PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY UNIVERSITY OF FLORIDA 2019
-
Upload
khangminh22 -
Category
Documents
-
view
3 -
download
0
Transcript of SAFETY CENTRIC SERVICES IN SMART CITIES By YAWEI PANG ...

SAFETY CENTRIC SERVICES IN SMART CITIES
By
YAWEI PANG
A DISSERTATION PRESENTED TO THE GRADUATE SCHOOLOF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT
OF THE REQUIREMENTS FOR THE DEGREE OFDOCTOR OF PHILOSOPHY
UNIVERSITY OF FLORIDA
2019

c© 2019 Yawei Pang

To my parents and my girlfriend

ACKNOWLEDGMENTS
First and foremost, I would like to express my sincere appreciation to my advisor, Prof.
Yuguang Fang, for his invaluable guidance and strong support during my PhD study at
University of Florida. I have learned so much from him about being a serious thinker and
researcher.
I also would like to thank Dr. Dapeng Wu, Dr. Shigang Chen, and Dr. Xiaolin Li
for serving on my supervisory committee. I appreciate this opportunity to learn invaluable
suggestions from them.
I would like to extend my thanks to all my colleagues and friends in Wireless Information
and Networked Things Laboratory (WINET) for providing me a family-like environment and
for their collaboration and insightful advice. In particular, I would like to acknowledge my
appreciation to Dr. Haichuan Ding, Yaodan Hu, Lan Zhang, Kaichen Yang, Xianhao Chen, and
Di Han for many valuable discussions.
I owe a special gratitude to my parents and girlfriend. Thank you for supporting me all
the way to today, even in my most difficult time. I love you!
Last but not least, I would like to give special thanks to the funding source, US National
Science Foundation grants under CNS-1409797, CNS-1343356, and CNS-1718708.
4

TABLE OF CONTENTS
page
ACKNOWLEDGMENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
LIST OF TABLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
LIST OF FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
ABSTRACT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
CHAPTER
1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.1 Safety and Challenge of Modern Cities . . . . . . . . . . . . . . . . . . . . . 111.2 Safety Service Platform . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.3 Dissertation Contribution and Organization . . . . . . . . . . . . . . . . . . . 16
2 RELATED WORK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.1 Safety Services . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.2 Vehicle as Resource . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3 PRELIMINARIES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.1 Radio Frequency Identification . . . . . . . . . . . . . . . . . . . . . . . . . . 233.2 Video Summarization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.3 Matching Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.4 Genetic Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4 L-TRACK:CHILDREN TRACKING IN THEME PARKS . . . . . . . . . . . . . . . 29
4.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294.2 Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.2.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.2.2 System Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.3 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.3.1 Reader Association . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.3.2 Maximum Power Limitation . . . . . . . . . . . . . . . . . . . . . . . 374.3.3 QoS Requirement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.3.4 EE Optimization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.4 Matching Approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384.4.1 Preference Establishment . . . . . . . . . . . . . . . . . . . . . . . . . 384.4.2 Dynamic Updating Matching Algorithm . . . . . . . . . . . . . . . . . 41
4.5 Performance Evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.5.1 Simulation Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.5.2 Results and Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5

5 SPATH: A SAFE WALKING NAVIGATION SERVICE . . . . . . . . . . . . . . . . 50
5.1 Backgroud . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505.2 System Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.2.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 535.2.2 System Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.3 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 595.4 Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.4.1 Computing Resource Optimization . . . . . . . . . . . . . . . . . . . . 615.4.2 Task Assignment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 625.4.3 Fast Iterative Matching (FIM) algorithm . . . . . . . . . . . . . . . . . 63
5.5 Performance Evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 655.5.1 Simulation Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 655.5.2 Results and Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6 VISS: VEHICLE BASED INTELLIGENT SURVEILLANCE SYSTEM . . . . . . . . . 70
6.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 706.2 System Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
6.2.1 Architecture Overview . . . . . . . . . . . . . . . . . . . . . . . . . . 736.2.2 System Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
6.3 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 786.4 Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 796.5 Performance Evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
7 SUMMARY AND CONCLUSIONS . . . . . . . . . . . . . . . . . . . . . . . . . . 86
REFERENCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
BIOGRAPHICAL SKETCH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
6

LIST OF TABLES
Table page
4-1 Table of parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5-1 Symbols and definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
6-1 Symbols and description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
7

LIST OF FIGURES
Figure page
1-1 Overview of safety centric platform. . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1-2 Architecture of safety centric platform. . . . . . . . . . . . . . . . . . . . . . . . . 15
3-1 Illustration of RFID communication. . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3-2 Illustration of matching. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3-3 Illustration of crossover and mutation. . . . . . . . . . . . . . . . . . . . . . . . . 28
4-1 System architecture. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4-2 Whole process of data processing and transmissions. . . . . . . . . . . . . . . . . . 34
4-3 A snapshot of mobile device location with N=70. . . . . . . . . . . . . . . . . . . . 43
4-4 Comparison to the optimal solution. . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4-5 Comparison of different matching algorithms. . . . . . . . . . . . . . . . . . . . . . 47
4-6 Comparison of different power allocation approaches. . . . . . . . . . . . . . . . . . 48
4-7 EE under different density of mobile devices. . . . . . . . . . . . . . . . . . . . . . 48
4-8 EE under different computation capability of mobile device. . . . . . . . . . . . . . 49
5-1 System architecture. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5-2 Illustration of SPATH. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
5-3 Illustration of video summarizations and transmissions. . . . . . . . . . . . . . . . . 55
5-4 The comparison of different schemes. . . . . . . . . . . . . . . . . . . . . . . . . . 68
5-5 Impact of available computing power. . . . . . . . . . . . . . . . . . . . . . . . . . 68
5-6 Impact of data size . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5-7 Impact of bandwidth. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
6-1 System architecture. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
6-2 Illustration of working process . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
6-3 Evaluation results for network size. . . . . . . . . . . . . . . . . . . . . . . . . . . 83
6-4 Impact of target regions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
6-5 Impact of participants. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
8

Abstract of Dissertation Presented to the Graduate Schoolof the University of Florida in Partial Fulfillment of theRequirements for the Degree of Doctor of Philosophy
SAFETY CENTRIC SERVICES IN SMART CITIES
By
Yawei Pang
August 2019
Chair: Yuguang FangMajor: Electrical and Computer Engineering
Smart cities are the future to handle population shifts and the increased demand of
services. However, safety becomes one of the most important concerns with respect to the fact
that more than 1 million crimes happened in U.S. every year. In this dissertation, we propose
a safety centric platform leveraging redundant computing and communication capabilities of
mobile devices or autonomous vehicles to enable local processing, which reduces the service
latency, eliminates potential network congestion, and improves resource utilization. Our
current contributions are mainly threefold. In the first work, we design a children tracking
service for theme parks based on radio-frequency identification (RFID) technology. In order to
guarantee efficient children tracking, we further optimize the utilization of available computing
resource for service provisioning. In the second work, we design another service, SPATH (the
Safest PATH), to provide a safe walking navigation in smart cities. To support this service,
wireless cameras, existing cellular infrastructure, and vehicles are utilized to process and
transmit surveillance videos, which can be viewed by users to check the current safety status.
Furthermore, video summarizing technology is applied to extract valuable information from
a video file to avoid network congestion. Since the quality of service for this application is
strongly correlated with the latency for video delivery, we address a latency minimization
problem by jointly considering the computing resource allocation and task assignment. In
the third work, we design a Vehicle based Intelligent Surveillance System (VISS) to improve
public safety in smart cities. VISS recruits vehicles as the mobile monitoring nodes to expand
9

geographical monitoring regions. Cooperating with slowly moving or parked vehicles with
sufficient computing capability, VISS can extract potential victims from the monitoring video
files and recruit mobile monitoring nodes to monitor potential victims as long as possible. To
measure the performance of VISS, coverage problems with limited budget are investigated by
considering recruitment of mobile monitoring nodes.
10

CHAPTER 1INTRODUCTION
1.1 Safety and Challenge of Modern Cities
The world we currently live in is highly urbanized with an estimated more than 54% of
the global population lives in urban centers today. This growing trend is likely to maintain for
the next ten years with roughly 95% of urban sprawl taking place in the developing countries.
By 2050, the population dwelling in the urban areas will be expected to rise to 66% of the
global population [1]. The speed of urban expansion as well as migration to city areas seems
faster than the growth of city infrastructure, spaces and services, which may lead to insufficient
provision of infrastructure and services thus may affect the safety quality of citizens living in
urban areas, especially for children and women.
The crime reports revealed by the Federal Bureau of Investigation (FBI) from its Uniform
Crime Reporting (UCR) program shows increasing rates of nationwide violent crimes and
homicide. Specifically, the rate of violent crime reached 386.3 per 100,000 in 2016 [2]. Other
data from the UCR and the National Crime Victimization Survey (NCVS) suggest higher crime
rates in city areas that are densely populated than in suburban or rural areas in general [3].
According to the report, around 50% of robberies happened in urban areas. Given that
residents in city areas were exposed to the highest crime rates, how to utilize technology to
improve the safety quality of residents of urban areas is a challenging problem.
In light of this, scholars and technology companies propose new and advanced services
to improve the safety quality and well-beings of citizens in urban areas. For instance, crime
hotspots is a popular tools used by researchers and police to improve the safety of cities.
The term hotspots, which refers to areas where crimes frequently take place, are used by
scholars and police in various ways [4, 5]. In [4], Paulsen has observed the increasing usage of
crime hotspots that prompts police officers to locate areas with safety concerns within their
beats using crime maps and then make adjustment to their patrol strategies correspondingly.
The author investigates the effects of crime maps on officers? perceptions of crime patterns
11

and their subsequent patrol activities. Bogomolov et al. have made an attempt to predict
crime hotspots to improve the public safety by using human behavioral data that stem
from various sources including mobile network activity, demography, along with open data
pertaining to crime events in [5]. Safe navigation services are proposed to help citizens find
the safe and shot path to their destinations [6, 7, 8, 9]. Pedestrian safety services have been
introduced to solve the distracted walking problem, since pedestrian often perform multiple
task simultaneously such as talking over the mobile phone, listening to music, or browsing the
news while walking [10, 11, 12, 13, 14]. Driving safety service are offered to reduce motor
vehicle crashes [15, 16, 17, 18].
1.2 Safety Service Platform
There are serval drawbacks for new and advanced public safety related services. First,
different safety services focus on the different areas, thus each new service is based on facilities
that are newly deployed. Thus, the high maintenance cost of these facilities compel the service
providers provide the services to users with high fees. For example, in order to avoid children
missing in the public areas such as theme parks or shopping malls, parents buy locators, the
GPS (Global Positioning System) based tracking services, to monitor their children. The cost
for a locator itself starts from 50 dollars up to serval hundreds dollars, and the tracking plans
start from $30 up [19]. The cost is very high for most families. Second, actually, some services
utilize the same data, since these services are belonging to different systems, the data may
need to be processed many times, which means the data are transmitted and computed more
than once. Thus, a large amount of computing and communication resources are wasted.
For example, most cities have video surveillance system for traffic control or target vehicle
searching service. Since two services are used for different purposes, they do not cooperate
with each other. When there is a target vehicle to be located, all related videos need to be
processed again to find the target vehicle. Third, some data from one public safety subsystem
can be utilized by another system. All these useful data is wasted since the difference between
subsystems makes them not to cooperate to work together. For example. The amber alert
12

system is a message distributed system to ask the public for help in finding abducted children.
Amber alerts distribute related vehicle information via commercial and public radio stations,
television stations or text messages. Video surveillance for the traffic control is also a powerful
system to find the target vehicle. Actually, video surveillance can help to improve the efficiency
of the Amber alert system
On the other hand, as the era of Internet of Things with various kinds of applications
starts to emerge, the Internet is evolving and becoming an integral part of our lives. The time
has now come when everything is connected to everything else. All the smart devices like
autonomous vehicles, smart phones, and other electronics exist in everyone’s life. According
to the report, there were around 1.56 billion smartphones sales worldwide only in 2018 [20].
Actually, all these smart devices have plentiful computing and communication capabilities.
However, the average time spend by users on their smartphones is nearly 3 hours, which means
there is a mass of redundant computation and communication capabilities of smart devices can
be reused [21].
Therefore, in spite of all the facts mentioned above, we propose a system by leveraging
redundant computation and communication capabilities of mobile devices or autonomous
vehicles to support public safety related services (as shown in Figure 1-1). To the best of
our knowledge, the definition of a platform, integrating all safety centric services, leveraging
redundant computation and communication capabilities of mobile devices or autonomous
vehicles to enable local processing is novel. The proposed system can reduce the service delay,
eliminate potential network congestion, and improve resource utilization. Figure 1-2 shows key
components of this platform and the corresponding function of key components are as follows.
IoT node: For safety centric services, there are generally three IoT nodes: RFID, sensor,
and camera. RFID technology offers automatic identification of objects to which the tags are
attached. Passive RFID tags are not battery powered, which leverages the power from reader’s
interrogation signal to communicate with the reader. Sensors play an important roles in safety
services with their availability, which are smaller, cheaper, and intelligent. Cameras can be
13

Figure 1-1. Overview of safety centric platform.
static street cameras or dash cameras on vehicles with communication capacity. All IoT nodes
communicate with edge nodes with short-range communication technology, such as Bluetooth,
WiFi, or mmWave.
Edge node: This can be an autonomous vehicle or mobile device such as smartphone,
which have sufficient computing, communication, and storage capability. Edge nodes can help
reduce energy consumption on IoT devices, save network bandwidth, filter massive redundant
data, and reduce latency for specific safety services or achieve application-specific requirements.
The communication among the edge nodes via harvested bands. Computing results would be
uploaded to the cloud for further proceed or serve remote users. For local users, the system
can offer the same service through localized protocols.
Controller: The controller periodically monitors the status of edge nodes and collects
status information for decision making. Controller decides whether an edge node is qualified for
14
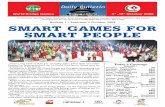
Figure 1-2. Architecture of safety centric platform.
an offloading task in terms of certain status, such as CPU, RAM, available bandwidth, and free
memory. Furthermore, a controller could use prediction techniques to forecast the connectivity,
location, and link quality of a mobile edge node.
Cloud: The major function of the cloud is to execute further computing for heavy tasks.
Sometimes, a computation-intensive task might not be performed on edge nodes due to
resource constraints; therefore, the cloud would execute these tasks and return the result to
users. The cloud also collects the results of the offloaded tasks, which have been executed on
edge nodes, and returns it to the user’s application.
15

User end: This is an application installed on the user’s mobile device, which has multiple
interface that can be used for safe navigation, children tracking, or other safety services.
The proposed framework is characterized by a flexible and scalable structure that permits
its use in potential safety centric services. Each special service may utilize different components
of the system. The general process to provide the safety service to users includes following
steps.
Step1) Users submit their requests to the system.
Step2) The controller collect information of IoT nodes and edge computing nodes, such as
the available computing resource on edge computing nodes.
Step3) Based on the collected information and objective of services, the controller
distributes the control messages to IoT nodes or edge nodes. For example, if the IoT nodes
need to offload the computing task to edge nodes, the controller makes decision how to offload
data collected from IoT nodes to edge nodes for computing (such as object identification or
image feature detection and extraction).
Step4) Related data is transmitted from IoT nodes to edge computing nodes and the data
is processed.
Step5) Edge computing units send analysis result back to the controller or upload result to
the Cloud for further processing.
Step6) The system sends the corresponding result to the users. Furthermore, the system
can offer the same service to local users through localized protocols.
1.3 Dissertation Contribution and Organization
Utilizing the safety centric platform to support safety related services brings in significant
challenges. In this dissertation, I mainly contribute three unique challenges of safety centric
services in a smart city.
Children tracking service: We propose a children tracking application under the
architecture of safety centric platform. With the designed application, the locations of children
can be tracked with simple carry-on devices, namely, RFID tags. We utilize the mobile devices
16

carried by park employees and/or visitors as local processing units to avoid the potential
congestion problem. With the help of remote control center, each reader is matched with a
mobile device for data processing. EE of mobile devices is critical in our scenario because of
the energy limitation of associated mobile devices. We formulate an Energy efficiency (EE)
optimization problem by jointly considering the resource allocation and user association.
We adopt dynamic update matching algorithm to provide an suboptimal solution. Through
extensive simulations, we show that our proposed schemes are effective in improving the EE
performance of associated mobile devices.
Safe walking navigation service: We propose a safe walking navigation application,
SPATH (the Safest PATH). In this design, wireless cameras, existing cellular infrastructure,
and vehicles with underutilized computing resources are utilized to process and transmit
surveillance videos, which can be viewed by users to check the current safety status of
different walking paths. Noting the long-distance transmission of a large volume of videos
may cause network congestion, video summarizing technology, which is realized by utilizing
the underutilized computing capability in vehicles, is applied to extract valuable information
from a video file while effectively compressing its data size. Since the quality of service for
this application is strongly correlated with the latency of delivering videos, we formulate a
latency minimization problem by jointly considering the computing resource allocation and
computing task assignment. A Fast Iterative Matching (FIM) is proposed with low complexity
to effectively solve the optimization problem. Simulation results demonstrates the effectiveness
and efficiency of proposed solution.
Intelligent surveillance service: We propose a Vehicle based Intelligent Surveillance
System (VISS) to improve public safety in smart cities. Video surveillance systems as the
popular tools to improve public safety have been widely used in many cities. However, blind
areas and high cost for maintenance and deployment make the city contain public safety
uncovered holes. Vehicle based monitoring systems, utilizing vehicles installed dash cameras
to monitor target regions, is the potential solution improving the public safety. With the
17

consideration of video data size, limited budget ,and safety status difference, a Vehicle based
Intelligent Surveillance System (VISS) is designed to improve public safety in smart cities.
First, VISS recruit vehicles as the mobile monitoring nodes to expand geographical monitoring
regions. Cooperating with slowly moving or parked vehicles with sufficient computing
capability, VISS can extract potential victims from the monitoring video files and recruit mobile
monitoring node to monitor potential victims as long as possible. Thanks to the high mobility
of vehicles, VISS has an opportunity to achieve potential victims searching and monitoring with
lower budget. To measure the performance of VISS, two optimization problems, i.e., spatial
coverage maximization problem and temporal coverage problem, are formulated by considering
mobile monitoring nodes recruitment and computing resource allocation. A heuristic algorithm
is proposed with low complexity to effectively solve the optimization problems. Simulation
results demonstrated the effectiveness and efficiency of VISS.
The rest of this dissertation is organized as follows. Chapter 2 overviews the related
works. Chapter 3 describes the corresponding concepts in this dissertation. Chapter 4 discusses
the L-TRACK service for public areas in smart cities. Chapter 5 presents the SPATH service
in smart cities. Chapter 6 gives the VISS service in smart cities. Chapter 7 summarizes this
dissertation.
18

CHAPTER 2RELATED WORK
2.1 Safety Services
The role of Smart Cities in ensuring public safety and improving citizens’ quality of life has
gained increasing attention. Using cutting-edge technology (e.g., the Internet of Things) to
effectively combat crime and increase the interconnectivity among citizens can transform Smart
Cities into Safe Cities. Accordingly, this section summarizes related work on safety services.
Children Tracking Services
We classify the existing applications for tracking children into three types. The Type-I
applications [22, 23, 24, 25, 26] rely on GPS technology. In [22], Gupta et al. design a system
utilizing GPS, SMS (Short Messaging Service) and smartphones. Smartphones as the locators
are carried by the children, so they can send location information to the parents through the
Internet. SMS plays as a backup option in the system. Once children enter the area where
there is no Internet connection, the location information can be sent as a short message
through the cellular networks. Even though the proposed system in [22] can easily track the
children, it has several drawbacks. First, the large size of a smartphone makes it inconvenient
to carry around for children. Second, the smartphone has energy limitation. Third, there is a
high risk of losing the smartphone, which results in the failure of the system.
The Type-II applications [27, 28, 29, 30] employ the Bluetooth technology. A tracking
system using Bluetooth MANET (Mobile Ad hoc NETwork) has been proposed in [28]. In the
scenario of Morii et al., every target child has an android terminal, which can autonomously
configure a wireless network based on autonomous clustering technique. Android terminals in
the cluster communicate with each other to collect group information. As a result, each parent
can check whether his/her child becomes alone or not. In addition, parents also receive the
current locations of their children. In [28], they design two-tier networks to support the system.
The first tier is a Bluetooth MANET, which can easily form a group. The second tier is the
mesh networks that deliver the data from the group to the Internet. However, this system still
19

has its own limitations, such as large device size, limited device energy, and heavy reliance
on the Internet. In [27], Liu et al. propose a BLE tag based system that utilizes the limited
communication range between the locator and the receiver. The devices (e.g., smartphones)
carried by users keep receiving signals from BLE tags as long as the children stay in the safety
range (e.g., communication range) of the users (e.g., parents of the children). Once losing the
communications from the locators, the users’ devices get an alert. To overcome the weakness
that the system may fail to work when children disappear from the range, Liu and Li [27]
design a collaborative approach to finding the lost children. However, the limited energy
problem of BLE tags remains unsolved.
The Type-III applications construct RFID networks to track children. According to the
scheme of Lin et al. [31], RFID readers are deployed in key areas to monitor tags (which
are attached to children) passing by. Depending on the location, readers can choose to
either directly transmit data to nearby storage node or rely on packet passing nodes (e.g.,
visitors or employees) to deliver the data. The major problem of this RFID system is that the
packet nodes may lead to a long delay in sending the data to the nearby storage node. To
overcome this weakness, Chen in [32] creates a scenario in which RFID readers are placed in
the landmarks of a theme park, making it easier to keep monitoring the children when they
play around the landmarks. The wireless sensor networks would subsequently transmit the data
to the gateway. However, the coverage is a serious problem in this scenario.
Pre-crime Warning Applications
Early works on the pre-crime warning applications, such as [6, 7, 8, 9], are focused on
utilizing historical crime data and crowdsourced feedbacks to assess the safety status. In [6],
Galbrun et al. develop a crime probability model based on the historical crime data in Chicago
and Philadelphia. They estimate the possible crime hot spots with Gaussian kernel density
estimation. In order to measure the safety status of the navigation path, crime activity density
is proposed, which is quantified by aggregating crime probability of each point on the walking
20

path. Moreover, they design an algorithm to offer candidate paths for users with a different
tradeoff between distance and safety.
By observing the drawbacks of the approach in [6], Goel et al. improve the safety model
with two types of data, namely static and dynamic [7]. The static data is open data including
historical crime data, road quality information, locations of police stations, and schedule of
public transport, etc. Information in static data can be used to measure whether a navigation
path is safe to walk or not. However, the static data may not accurately capture the actual
situation as the information may be outdated. Therefore, the authors build a dynamic dataset
to adapt to the information change. Dynamic data includes feedback from users in near real
time, which is gathered in a crowdsourced manner. Users can report the safety status of any
point on their walking path. Following the design of Goel et al., Mata et al. identify the crime
level of the walking path with the official crime data and the useful information from online
social media as in [8]. Criminal data repository is first built from tweets related to crime
events. Then, the crime records are classified based on crime type, time, and location. Finally,
a safe route is obtained from the estimation of crime rates.
Different from previous works, Garvey et al. [9] integrate pre-crime warning and post-crime
service. In order to overcome the inaccuracy of the estimation of safety status, they develop
the PASSAGE, a safety application. In [9], Garvey et al. also offer possible walking path of
a user by applying estimation model of crime points and allows the user to add friends or
relatives as the guardians, who receive the current location of the user.
2.2 Vehicle as Resource
Today, the global automotive industry is being transformed with the advancement of
computation and communication technologies. Now drivers have more and more options of
smart cars for everyday use. Generally speaking, the function of a smart car can be improved
with the following devices in place: computing devices, GPS devices, communication devices,
sensing devices, radar devices, cameras, and storage devices. which can be used to improve
21

driving safety by sensing and processing the driving environment. As such, it is reasonable to
view a vehicle such as a smart car as a resource.
In [33], Zhang et al. propose a system architecture, where vehicles are service providers for
smartphones. When infrastructure-based cloud does not have enough resource to support the
service for users, residual computing in vehicles is allocated to accomplish mobile application
offloading. In [34, 35], Ding et al. design a V-CCHN (Vehicular Cognitive Capability Harvesting
Network) architecture, which utilizes CR routers enabled vehicles to handle the explosively
growing wireless data traffic. The V-CCHN involves several new features, such as the capacity
of reconfiguring agile communication interfaces to interoperate with other devices and mobility
to realize data exchange within proximity, to fully exploit available vehicles. For more details of
this architecture, readers are referred to [34].
22

CHAPTER 3PRELIMINARIES
3.1 Radio Frequency Identification
The technology of Radio Frequency Identification (RFID) can automatically detect a
person or an object via radio waves within a wide range of distance (e.g., from a few inches to
hundreds of feet) [36]. As an automatic data capture system, RFID can largely improve system
efficiency. Without direct contact, RFID is able to communicate via RF signals. With silicon
chips (where data is kept) being tagged to people, animals or non-living objects, RFID provides
an electronic product code (EPC) which is a unique identification number for each identified
target [37]. Overall, there are three main categories of the RFID tags.
Active tag: It has a power support system for the circuitry and antenna of the tag.
The strength an active RFID tag is manifested in the long-distance (e.g., over a hundred
feet) readability and the incorporation of other sensors powered by alternative current (AC).
Nonetheless, the main weakness lies in the limited lifespan of an active RFID tag. Specifically,
the tag is very costly and large in size. It may also increase the maintenance expense in the
case of battery replacement. Further, battery outages in this type of tag may entail high
chances of misreads [38].
Semi-passive tag: In order to deliver identification information, semi-passive tags reflect
RF singnal back to the tag reader. With a battery to power ICs, this type of tags give birth
to various innovative products. For instance, with a built-in sensor, the tag can transmit
information such as lighting, temperature and humidity in real time. By using the battery only
to power a simple IC and sensor, the semi-passive tags are able to keep a balance between
cost, size, and range [38].
Passive tag: Instead of having a power source, the passive tag is powered by the reader.
It relies on the power drawn from the inductive coupling with reader antenna. However,
a noticeable problem is that a passive tag is only readable within a few feet of distance.
Nevertheless, the advantages of a passive tag are evident: First, its life cycle can be extended
23

to more than 20 years as the tag can function properly in the absence of a battery. Moreover,
the passive tag is much cheaper (costs only 10 cents) and physically smaller compared to an
active tag, hence it is commonly applied to consumer products and a wide range of areas [38].
Figure 3-1. Illustration of RFID communication.
Passive tags send radio waves that contain EPC/information to the reader, which
then sends continuous waves (CW) to provide power for the tag and allow the chip in the
tag to function [39]. Passive tag can transmit information to the reader via radio waves
without having direct contact with the reader. This is made possible by the technology called
backscattering (as shown in Figure 3-1). When tuned to a certain frequency, passive tag
is capable to take in most energy at the same frequency level. However, when there is an
impedance mismatch at this frequency, the antenna will reflect back some of the energy (as
tiny waves) toward the reader [40]. The RFID technology has demonstrated considerable
value across fields. For example, it enables the automation of supply chain management, asset
tracking, animal monitoring medical applications, warehouse and access control in contactless
manner [41].
3.2 Video Summarization
The creation of video content has experienced a tremendous increase within the past
few years, causing a series of problems in relation to information congestion and content
management. With the growing number of videos released on the web, there is a need to
24

efficiently extract useful information from the videos. As such, technologies focusing on video
content processing deserve greater attention from the scholars [42, 43].
The various stages of video summary algorithms based on key frames are as described
below [44, 45].
Step 1) Data Input. The format of the videos can be diverse. A typical format is AVI
(Audio Video Interleave).
Step 2) Frame Division. This step involves processing the video which can be achieved
through frame division. In this step, the recorded video is split into multiple frames, which may
take up a lot of memory space. The number of frames is determined by the size of the video.
Moreover, the frame rate is about 20 to 30 frames per second.
Step 3) Feature Extraction. This step is to extract visual features of the key frames
through feature extraction. These features include color, edge and motion features. Features
are extracted based on different frames’ characteristics, which are determined by the frame
difference values.
Step 4) Frame Selection. It starts with naming the first frame as a key frame. If the
difference between the current frame and the previous key frame is sufficiently large, the
current frame will be named as the key frame hence be selected. Such selection process is
applied for all video frames.
3.3 Matching Theory
There are two major approaches to solve the optimization problems. One is the
centralized algorithms which use highly complex computation to obtain optimal outcomes.
The other is distributed approaches which use less complex computation to achieve suboptimal
solutions. Matching game is one of the distributed approaches that are commonly used
to address issues regarding optimization. Studies on Matching Theory examine the ways
through which agents from different groups can be linked with one another according to
their preferences. The theory was brought up by David Gale and Lloyd Shapley in 1962 in an
attempt to solve the two-sided matching problem [46]. Afterwards researchers have applied this
25

theory to a broad range of fields and managed to address matching problems such as allocating
students to college dorms, passengers to airport shuttles and organs to patients in hospital.
Taken together, many real-life cases of large scope can be modeled as matching problems
based on the preferences of agents [47].
Figure 3-2. Illustration of matching.
An instance involves two finite and disjoint sets denoted byM = m1, ..., mi, ..., mp and
W = w1, ..., wj, ..., wq, respectively. wj ∈ W has a positive integer capacity, denoted by Nj
, indicating the number of posts that wj has. The agents are the wj and mi. Each agent has
a preference list in which she/it ranks agents in opposite set in strict order. For example, if mi
prefers wj to wk, we write it as wj ≻miwk. Given preferences, we give the following formal
matching definition.
Definition 1. [48] A one-to-one matching µ is a mapping from the setM to W, such that
µ(mi) = wj if only if µ(wj) = mi. Moreover, µ(mi) ∈ W and µ(wi) ∈M.
Once a matching µ is established, we need to check the stability of µ. If no agent (mi
or wj) wants to change its current paired assignment, a matching is stable. The definition of
stability is provided in Definition 2.
26

Definition 2. [47] A matching µ is said to be stable if it admits no blocking pairs. A pair
(mi, wj) is a blocking pair if the following the conditions hold: (1) mi is either unassigned or
prefers wj to µ(mi); (2) wj is either unassigned or prefers mi to µ(wj)
Matching theory also provides tractable solution to the problem of multiple agents in two
distinct groups. Each agent wants to match with one or multiple agents in the opposite group.
Mathematically, the many to one matching can be defined as follows.
Definition 3. [49] Given two distinct setM and W, a matching µ is a mapping function from
M∪W into 2M∪W , such that: µ(mi) ⊆ W and |µ(mi)| ≤ 1 for all mi ∈M; µ(wj) ⊆M and
|µ(wj)| ≤ Nj for all wj ∈ W, where Nj is the capacity of agent wj ∈ W; µ(mi) = wj if and
only if wj ⊆ µ(mi) for all (mi, wj) ∈ M×W
3.4 Genetic Algorithm
During 1960s to1970s, Holland along with other researchers first proposed the concept of
Genetic Algorithm (GA) which are inspired by the evolutionist theory [50]. According to the
evolutionist theory, all species on the earth face natural selection. While the strong species
gain greater chance to survive and preserve their genes through reproduction, the weak ones
are eliminated in the natural selection process. As a result, species with the preferable genetic
combination make up the majority of the population over the long term. Meanwhile, random
genetic changes may take place during the chronic process of evolution. If the changes are
beneficial for survival, such changes will be retained as new species evolve from their ancestors.
On the other hand, changes that do not increase the chance of survival are discarded in the
natural selection process.
Chromosomes, a key term in the Genetic Algorithm (GA), are made of genes that control
core features of the chromosome. Originally genes are used to indicate binary digits, whereas
their current implementations are commonly used to denote variables [51]. Generally speaking,
with the mapping technique called encoding, a chromosome is mapped to a particular solution
in the feasible solution set. A population composed of multiple chromosomes is randomly
27

Figure 3-3. Illustration of crossover and mutation.
initialized. Within a population, two operations of GA namely crossover and mutation are used
to generate new solutions.
As the most critical operator of GA, the crossover combines two chromosomes (known as
parents) to produce new chromosomes (known as offspring) [52]. Those chromosomes with
superior genes are more likely to be selected as parents to pass on their good genes to the
next generation. With the repetition of crossover operator, chromosome containing good genes
would become dominant in the population hence result in convergence to a local optima.
Another operation of GA is called mutation. Operating at the gene units, mutation is
specialized in preserving genes diversity. Mutation allows changes of characteristics to take
place randomly in chromosomes. Since the probability of mutation is quite small, the newly
produced chromosome will be similar to its parent. To sum up, both operations play an
important part in GA. Whilst crossover is capable to retain good genes in the population,
mutation can introduce slight changes to the population.
28

CHAPTER 4L-TRACK:CHILDREN TRACKING IN THEME PARKS
4.1 Background
Losing a beloved child is no doubt the worst thing for every parent. In some cases, parents
find that their children are lost while they are talking with others for a few seconds. Based
on the statistical data for Missing and Exploited Children released by the National Center, we
learn that roughly 800,000 children are missing every year in the United States, which means
roughly 2,000 children are reported missing every day [53]. Some incidents occur when parents
take their children to public places, especially the markets, shopping malls, and theme parks.
For example, in large theme parks like Walt Disney World, there are tens of thousands of
visitors every day. It may be just a turn-around and the next thing you realize is that your child
is missing. To make matters worse, finding a missing child in a huge park is almost impossible.
To prevent parents from losing their beloved children, researchers have developed many
systems and approaches. The most popular one is to place the GPS (Global Positioning
System) locators on their children. The Paw tracker, Trax GPS Tracker, and HEREO GPS
watch [54] are the popular products based on GPS. The main issues of using GPS systems
are high cost and energy limitation of a locator. When a GPS locator works in a continuous
mode, it consumes energy rapidly. Thus, Bluetooth Low Energy (BLE) is emerging as the
alternative approach to solve the children missing problem. In the BLE tracking systems,
the locator can directly communicate with a user’s device (e.g., smartphone). As mentioned
in [55, 56], a Bluetooth tracker company named Chipolo can help parents locate their children
by attaching BLE tags to children’s shoes or clothes. Even though the energy consumption has
been reduced using BLE tags, the energy problem still limits the popularity of BLE tracking
systems. Another drawback of the systems relying on BLE is that if the children go out of
the communication range, their parents may not locate their children any more. Given the
weakness mentioned above, it is imperative to design a new children tracking system, which is
energy efficient and robust to dynamically changing environments.
29

Nowadays, RFID technology [57, 58], especially the passive RFID, which relies on the
backscatter technology, has emerged as a promising approach due to its low cost and less
restriction on energy. In [31], Lin et al. construct an RFID based opportunistic network to
locate children. They use distributed nodes to store the location data of tags. In their design,
the system relies on moving people, who acts as carry-and-forward nodes to transmit data.
When users query the information of tags, the control center can find the corresponding
information in the distributed storage nodes. Chen et. al in [32] have proposed another system
that combines RFID networks with wireless sensor networks for tracking children in theme
parks. In their design, the readers rely on the wireless sensor networks for data transmissions.
However, there are several challenges facing RFID based children tracking system.
Firstly, potential congestion would reduce quality of service. Most of RFID based children
tracking systems adopt the centralized design. In this design, a reader would transmit collected
data to the remote control center (such as a base station) for processing and storage. For
example, the proposed system in [32] is designed in the centralized fashion. In their design,
reading data would be relayed back to the remote control center through multi-hop wireless
sensor networks. Actually, the remote control center would be congested due to all of devices
waiting for transmitting and computing data in its coverage. Secondly, unnecessary waste of
communication resource is another problem. Most of the situations, the readers would operate
in the continuous model. The continuously reading may incur significant traffic. Notice that it
is not necessary to transmit reading data all the time to remote control center since children
might stay in the same place, such as waiting in line for a spot of interest in a theme park.
Thirdly, full coverage of children activity area is critical. In the design of Lin et al. [31] and
Chen et. al [32], they both propose to simply place the fixed readers in key points. Without
full coverage of children activity area, the system may have the blind area. As a result, it is
critical to design an efficient and effective RFID based children tracking system.
Inspired by previous works, we propose a new children tracking system based on UHF
RFIDs (as shown in Fig 4-1). Similar to previous works, we propose to fasten the passive
30
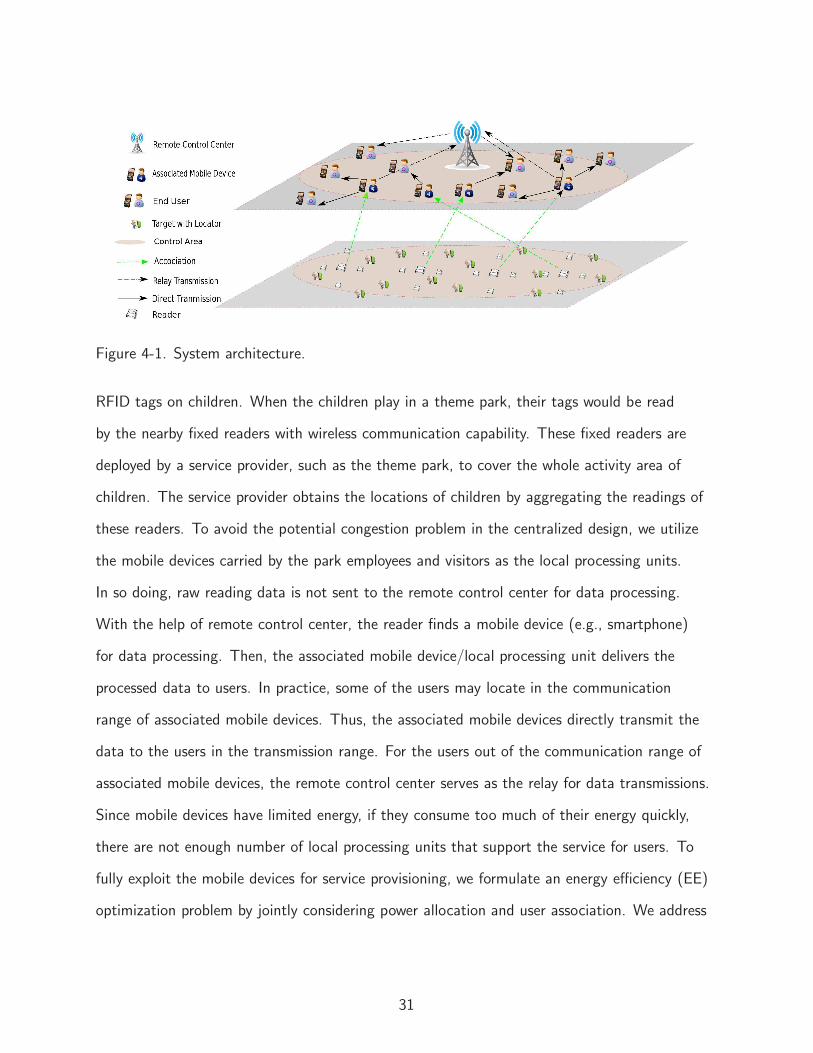
Figure 4-1. System architecture.
RFID tags on children. When the children play in a theme park, their tags would be read
by the nearby fixed readers with wireless communication capability. These fixed readers are
deployed by a service provider, such as the theme park, to cover the whole activity area of
children. The service provider obtains the locations of children by aggregating the readings of
these readers. To avoid the potential congestion problem in the centralized design, we utilize
the mobile devices carried by the park employees and visitors as the local processing units.
In so doing, raw reading data is not sent to the remote control center for data processing.
With the help of remote control center, the reader finds a mobile device (e.g., smartphone)
for data processing. Then, the associated mobile device/local processing unit delivers the
processed data to users. In practice, some of the users may locate in the communication
range of associated mobile devices. Thus, the associated mobile devices directly transmit the
data to the users in the transmission range. For the users out of the communication range of
associated mobile devices, the remote control center serves as the relay for data transmissions.
Since mobile devices have limited energy, if they consume too much of their energy quickly,
there are not enough number of local processing units that support the service for users. To
fully exploit the mobile devices for service provisioning, we formulate an energy efficiency (EE)
optimization problem by jointly considering power allocation and user association. We address
31

the EE optimization problem by adopting the dynamic updating matching algorithm. As such,
the main contributions of this chapter are summarized as follows:
First, we propose a novel RFID system to track children in public areas. With the
designed system, the locations of children can be tracked with simple carry-on devices, namely,
RFID tags. We utilize the mobile devices carried by park employees and/or visitors as local
processing units to avoid the potential congestion problem. With the help of remote control
center, each reader is matched with a mobile device for data processing.
Second, EE of mobile devices is critical in our scenario because of the energy limitation of
associated mobile devices. We formulate an EE optimization problem by jointly considering the
resource allocation and user association. Since the formulated EE problem is NP-complete, we
adopt dynamic update matching algorithm to provide an suboptimal solution.
Finally, through extensive simulations, we show that our proposed schemes are effective in
improving the EE performance of associated mobile devices.
4.2 Architecture
4.2.1 Overview
Fig. 4-1 gives a high-level overview of our proposed system. RFID tags are attached to
the visitors of theme parks. We call the tag attached on child is the target tag and the tag
placed on a normal visitor is the interference tag. In addition, we also deploy RFID reference
tags which can help readers locate target tags more easily. RFID readers are deployed in theme
parks to make sure that every point of the children’s activity area is covered at least by one
reader. We also assume that readers are equipped with communication radio interface with
other mobile devices, which can be done with certain customization. When children travel
in the theme parks, the attached tags will be scanned by the nearby fixed RFID readers. As
we mentioned in the previous section, we employ the wireless communication readers. Then,
readers send the scanned data to local processing units for data processing. Local processing
units are the mobile devices carried by park employees and visitors. Actually, visitors can access
this system via an application which is downloaded and installed on their mobile devices.
32

Parents can track their children through this application. If the smartphone of a visitor has
enough power, the visitor can apply as the local processing unit to perform processing and get
monetary compensation. Finally, local processing units send the processed data to devices of
users.
We divide the time into discrete fixed time period, called slot. At the beginning of the
slot, readers first scan its coverage area to read data from tags in the area. The reader utilizes
power control to tune the transmission power level in order to read the tags since power
control not only helps improve the location accuracy of target tags, but also avoids the reading
collision problem among readers. We group readers into clusters. In each cluster, one central
reader acts as the cluster head to gather reading data of all other readers. The cluster head
also has ability to buffer the reading data. Then, the cluster heads gather all the raw reading
data from their cluster members.
The raw reading data will go through two stages before being delivered to the users.
The first stage is the processing stage, which includes reference tag elimination, target tag
location estimation, and so on. In the beginning of processing stage, all cluster heads request
the remote control center help them find the local processing units. At the same time, the
remote control center requires information of all mobile devices registered as the candidates
of local processing units. The reader-mobile device association process will be finished at the
remote control center. Then readers send the raw reading data to the associated mobile device
(e.g., d1 in the Fig. 4-2 ). The raw reading data will be locally processed by the associated
mobile devices. Then, the processed data is passed to the second stage, the delivery stage.
In this system, we assume both readers and mobile devices have limited device to device
communication range. In the delivery stage, the associated mobile devices directly transmit the
processed data to the nearby end users (e.g., d2 and d3 in the Fig. 4-2) in its communication
range. For the end users out of the communication range of the associated mobile device
(such as d4 in the Fig. 4-2), the remote control center serves as the rely nodes for data
transmissions. In addition, in the subsequent development of this chapter, when we say the
33

reader, we mean the head of a reader cluster. The whole process are summarized in the
Fig. 4-2.
Figure 4-2. Whole process of data processing and transmissions..
4.2.2 System Model
We denote the set of the readers as R = 1, 2, · · · , j, · · · , R, the j-th reader by rj. We
also denote the mobile devices by D = 1, 2, · · · , i, · · · , D, the i-th mobile device by di. To
evaluate the performance of our system, we first elaborate a few important concepts we will
use in the subsequent development.
Link Data Rate
In our scenario, orthogonal channels are adopted in the transmissions among mobile
devices and transmissions from mobile devices to remote control center. Thus, transmissions
among different channels are interference free. According to the Shannon-Hartly theorem, the
data rate of the link between mobile device di and mobile device dk or remote control center B
is
ci,× = Wi× log2
(
1 +pi,×hi,×
N0Wi,×
)
. (4-1)
where × indicates a target node (either dk or base station B), and pi,× denotes the transmission
power of mobile device di, hi,× is the channel gain from mobile device di to dk or base station
34

B, and N0 is the power spectral density of Additive White Gaussian Noise (AWGN). Then, we
can get the total achieved data rate via the mobile device di is
Ci =∑
k∈Ti∪B
Wi,k log2
(
1 +pi,khi,k
N0Wi,k
)
. (4-2)
where Ti is the set of neighboring nodes, which means the end users within i’s transmission
range. For example, in the Fig. 4-2, the set of neighboring nodes of mobile device d1 is
d2,d3 since only these destinations/end users in its communication range. |Ti| is the
cardinality of the set Ti. Actually, Ti is determined by the reader association selection xj,i.
That is, when mobile device di associates with different reader ri, the set Ti is different.
Power Consumption
The total power consumption of each mobile device di includes two parts, which are the
aggregated power consumption for data processing EPi and the power consumption for data
transmissions, respectively. We define fi as the computation ability of mobile device di. The
power consumption of mobile device di for data processing can be calculated as[59]
EPi = κ(fi)
3 (4-3)
where κ is the coefficient depending on the chip architecture. Power consumption for data
transmissions can be characterized by[60]
ETRi =
∑
k∈Ti∪B
ηpi,k + P ciri (4-4)
Here, P ciri is denoted as the circuit power consumption and η is the power amplifier efficiency.
The power consumptions of the infrastructure nodes and fixed readers are assumed not to be
considered as all of them are powered by more powerful external power source.
Matching Matrix
We introduce an R × D reader association matrix. Element xj,i in the matrix indicates
whether or not the reader rj is associated with mobile device di. That is, fixed reader rj
transmits the raw data to mobile device di for processing when xj,i = 1; otherwise, xj,i = 0.
35

Table 4-1. Table of parameters
Parameter DescriptionR Set of readersD Set of mobile devicesrj j-th fiexd readerdi i-the mobile devicePi,× Transmission power of the mobile device dihi,× Channel gainN0 Power spectral density of additive white Gaussian noise
T ji Set of connected devices within di’s transmission range
EPi Power consumption for data processing of di
P ciri Circuit power consumption
η Power amplifier efficiency
To improve the clarity, notations of key parameters are summarized in Table 4-1
4.3 Problem Formulation
Given the model described before, we target at the problem on maximizing the energy
efficiency of associated mobile devices. In our design, sufficient number of available local
processing units can provide long and stable service for users. However, if all mobile devices
consume their energy quickly, there are few mobile devices would act as local processing units
to support users. Thus, improving energy efficiency of mobile devices can maintain quality of
experience and make the whole system stable [61]. Hence, we consider a joint EE optimization
problem for reader association decision and resource allocation. We first formulate the EE
function for each mobile device di, which is given by
EEi =Ci
EPi + ETR
i
(4-5)
where Ci is the total achieved data rate via mobile device di to users (mobile devices carried
by parents). That is to say, data from readers is processed on mobile device di, and then the
processed data is sent to users. To process data Cj,i for users, mobile device di consumes a
certain amount of power, which includes the power consumption for data processing EPi and
the power consumption for data transmissions ETRi .
Furthermore, we need to consider several constraints for the EE optimization problem.
36

4.3.1 Reader Association
The fixed reader rj can only associate with one mobile device for data processing. This
constraint can be captured as follows
∑
i∈N
xj,i = 1 (4-6)
4.3.2 Maximum Power Limitation
In our scenario, we assume each mobile device can just utilize transmission power below
the maximum Pmax, that is,
pi,k ≤ Pmax (k ∈ Ti ∪ B) (4-7)
4.3.3 QoS Requirement
In order to guarantee the QoS requirement for the users, we introduce the constraint as
Wi,k log2
(
1 +pi,khi,k
N0Wi,k
)
≥ cmin (k ∈ Ti ∪ B) (4-8)
where cmin is denoted as the QoS threshold.
37

4.3.4 EE Optimization
Based on the constraints we mentioned above, we have the following optimization problem
maxxj,i,pi,k
∑
i∈N
∑
j∈M xj,iωiCj,i
|∑j∈M xj,i|EPi +
∑
i∈M xj,iETRj,i
(4-9)
s.t.
Cj,i =∑
k∈Tj,i∪B
Wi,k log2
(
1 +pi,khi,k
N0Wi,k
)
ETRi =
∑
k∈Tj,i
ηpi,k + P ciri
EPi = κ(fi)
3
0 ≤ pi,k ≤ Pmax (k ∈ Tj,i ∪B)
Wi,k log2
(
1 +pi,khi,k
N0Wi,k
)
≥ cmin (k ∈ Tj,i ∪ B)
∑
i∈N
xj,i = 1
xj,i ∈ 0, 1
where ωi is a balancing weighting factor related to the residual energy of mobile device di
and the stable time. Actually, if a mobile device has more residual energy and does not move
frequently, it would be a better choice to be a local processing unit. Here, Tj,i is device di’s
neighboring nodes that request the data from reader rj . Clearly, our formulated optimization
problem (4-9) is a mixed-integer nonlinear programming problem, which is NP-complete as
proved in [62]. In the next section, we adopt matching theory to find the feasible solution to
the EE maximization problem.
4.4 Matching Approach
4.4.1 Preference Establishment
We first establish each player’s preference list. Notice that mobile devices’ preference lists
cannot be set up since the neighboring nodes set Tj,i for each device di is unknown before the
reader mapping decisions between readers and devices have been made. We consider the case
of two adjacent time slots. Assume the network condition changes slightly because the time
38

slot is short. That is to say, only a small number of readers’ or mobile devices’ preferences are
changed. Under this assumption, we can set up mobile devices’ preference lists of the current
time slot according to the knowledge from previous slot.
Preference Establishment
The basic idea to establish the preference of a mobile device is to use knowledge from
previous time period to obtain the set of neighboring nodes. We first set up the preference
list of rj . All readers establish their preference lists according to their benefit functions .
The benefit of reader rj depends on the achievable data transmission rate, which can be
characterized as µCj,i, where µ is the benefit factor. Without loss of generality, we set µ = 1.
Thus, the preference list of rj over device di at time slot t is VRj (t) = (V R
j,i(t)), where V Rj,i(t) is
abtained according to
V Rj,i(t) = ωi
∑
k∈Tj,i(t−1)∪B
Wi,klog2
(
1 +pi,k(t)hi,k(t)
N0Wi,k
)
(4-10)
We now introduce the preference establishment of a mobile device. Mobile device di
sets up its preference based on its transmission cost function. The cost function is the power
consumption for transmissions and processing, which is ν(EPi + ETR
j,i ). Similarly, we also
assume ν = 1 for ease of presentation. Then the preferences of di over device rj at time slot t
is VDi (t) = (V D
i,j (t)) and V Di,j (t) can be captured according to
V Di,j (t) = κ(fi)
3 +∑
k∈Tj,i∪B
ηpi,k(t) + P ciri (4-11)
We model di’s preference and rj ’s preference according to local maximum achievable EE
with the set of neighboring nodes Tj,i(t−1) at time slot t. Thus, we develop the following Fast
Iterative Power Allocation algorithm (FIPA) to obtain the transmission power between device
di and neighboring nodes set Tj,i, which is obtained from the formulated local power allocation
39

problem
maxpi,k
UEEi (t) =
Ci[pi,k(t)]
Ei[pi,k(t)](4-12)
s.t.
Ci[pi,k(t)] = ωi
∑
k∈Tj,i(t−1)∪B
Wi,k log2
(
1 +pi,k(t)hi,k(t)
N0Wi,k
)
Ei[pi,k(t)] = κ(fi)3 +
∑
k∈Tj,i(t−1)∪B
ηpi,k(t) + P ciri
0 ≤ pi,k ≤ Pmax (k ∈ Ti ∪ B)
Wi,k log2
(
1 +pi,khi,k
N0Wi,k
)
≥ cmin (k ∈ Ti ∪ B)
Since the problem formulated in (4-12) is a nonlinear fractional programming, we first
employ fractional programming theory to transform it to an equivalent convex programming.
Thus, based on what Dinkelback has elaborated in [63] and more recent studies [64] [65], we
have the following proposition:
Proposition 4.1. [63] Define the function Q as
Q(λ) = maxpi,k
Ci(pi,k)− λEi(pi,k). (4-13)
Then, the optimal power allocation p∗i,k is achieved if and only if there is λ∗ such that Q(λ∗) =
Ci(p∗i,k)− λ∗Ei(p
∗i,k) = 0.
From this result, we develop the FIPA algorithm.
FIPA Algorithm
The equivalent optimization problem is given by
maxpi,k
Ci(pi,k)− λ∗Ei(pi,k) (4-14)
s.t.
0 ≤ pi,k ≤ Pmax (k ∈ Ti ∪ B)
ci,k ≥ cmin (k ∈ Ti ∪ B)
40

Then we utilize FIPA algorithm based on the well-known Dinkelbach algorithm [63] to get the
specific values of λ∗. At the nth iteration, with the value of λ(n − 1) from the (n − 1)th
iteration, pi,k(n) are obtained by
pi,k(n) = [1
ηλ(n− 1)ln2− N0Wi,k
hi,k
]+. (4-15)
where [x]+ = maxx, 0. Then, if pi,k(n) > Pmax, we set value of pi,k(n) to Pmax. If
pi,k(n) < Pmini,k (which is obtained from (4-8)), we set value of pi,k(n) to Pmin
i,k . Finally, if
Ci[pi,k(n)]− λ(n− 1)Ei[pi,k(n)] < ∆ holds, the algorithm stops. Otherwise, update n = n+1,
λ = Ci[pi,k(n)]/Ei[pi,k(n)], and go to the next iteration. We can also use more efficient
algorithms developed in [64] [65], but we choose Dinkelbach’s algorithm for the ease of
presentation.Algorithm 4.1. FIPA Algorithm
1: procedure PIFA(∆,λ(0),N ,n)2: Calculate each Pmin
i,k according to (4-8)3: while n ≤ N do4: Obtain pi,k(n) by (4-15)5: if pi,k(n) < Pmin
i,k then6: Set pi,k(n) = Pmin
i,k
7: end if8: if pi,k(n) > Pmax then9: Set pi,k(n) = Pmax
10: end if11: if Ci[pi,k(n)]− λ(n− 1)Ei[pi,k(n)] ≥ ∆ then12: Set λ(n) = Ci[pi,k(n)]/Ei[pi,k(n)];13: else14: pi,k(t) = pi,k(n)15: end if16: Update n = n+ 117: end while18: end procedure
4.4.2 Dynamic Updating Matching Algorithm
When the preference establishment is completed, we can start with the matching. We
propose the Dynamic Updating Matching (DUM) algorithm, which proceeds iteratively.The
DUM algorithm has two stages. At the first stage, readers conduct the matching based on
41

the preference list VRj . In each iteration, reader ri proposes to its most preferred device di.
After this, di is removed from preference list VRj . Then device di decides whether to accept or
reject the proposal based on its preference list over the reader rj . If there are more than one
proposal, device di chooses to keep the reader rj that it favors the most, and rejects the rest.
The proposing and accepting/rejecting iterations run for as many rounds as needed until all
readers are matched or all readers’ preferences that are fully examined. We also consider the
case all readers’ preferences are fully examined but some readers are still unmatched. We let
device di increase its accepting capacity and reader rj updates its preference list based on the
current matching. Then readers conduct the new matching based on the new preference lists.Algorithm 4.2. DUM Algorithm
1: procedure DUM(pi,k(t)) ⊲ Matching Construction;2: Each rj sets up its preference VR
j according to (4-10)
3: Each di sets up its preference VDi according to (4-11)
4: Construct unmatched set Run, set Run=R ⊲ Matching;5: while Run 6= ∅ do6: for each rj ∈ Run do7: Proposes to the first di in its preference list and remove di from VR
j ;8: end for9: for di ∈ D do10: if di receives one proposal then11: di keeps the proposal;12: Remove rj from Run;13: else14: di keeps the most preferred proposal from rj∗, and rejects the rest;15: di removes rj∗ from the Run, and add the rejected readers into the Run;16: end if17: end for18: end while ⊲ State Update;19: if Run 6= ∅ then20: Update preference list VD
i ;21: Update preference list VR
i ;22: Go to step 6;23: end if24: end procedure
42

Figure 4-3. A snapshot of mobile device location with N=70.
4.5 Performance Evaluation
4.5.1 Simulation Setup
This section presents EE of the proposed solution. There are R readers placed in the
grid topology and D mobile devices randomly distributed in the area. A snapshot of mobile
device locations with D = 70 and reader locations with R = 49 is shown in Fig. 4-3. The
big diamond is the remote control center, the stars are the RFID readers, and the dots are the
mobile devices. We assume the communication range between mobile devices is up to 100 m.
The mobile devices are assumed to have an circuitry power consumption Pcir = 50mW . We
also set the effective switched capacitance κ = 10−28[59]. The channel fading is modeled by
complex normal distribution, CN (0, 1)[66].
To evaluate the performance, the proposed matching algorithm is compared with classical
stable marriage matching (SMM) algorithm and one heuristic algorithm. The heuristic
algorithm is called reader-greedy algorithm, which readers are always matched with the mobile
devices most preferred according to readers’ preferences. In addition, for the purpose of
43
comparing the impact of our proposed power allocation approach, we also introduce random
power allocation approach and greedy power allocation approach. In particular, greedy power
allocation approach allocates the maximum transmission power Pmax for every transmission
link of associated mobile devices. Random power allocation approach employs transmission
power distributed in the range [0, Pmax]
4.5.2 Results and Analysis
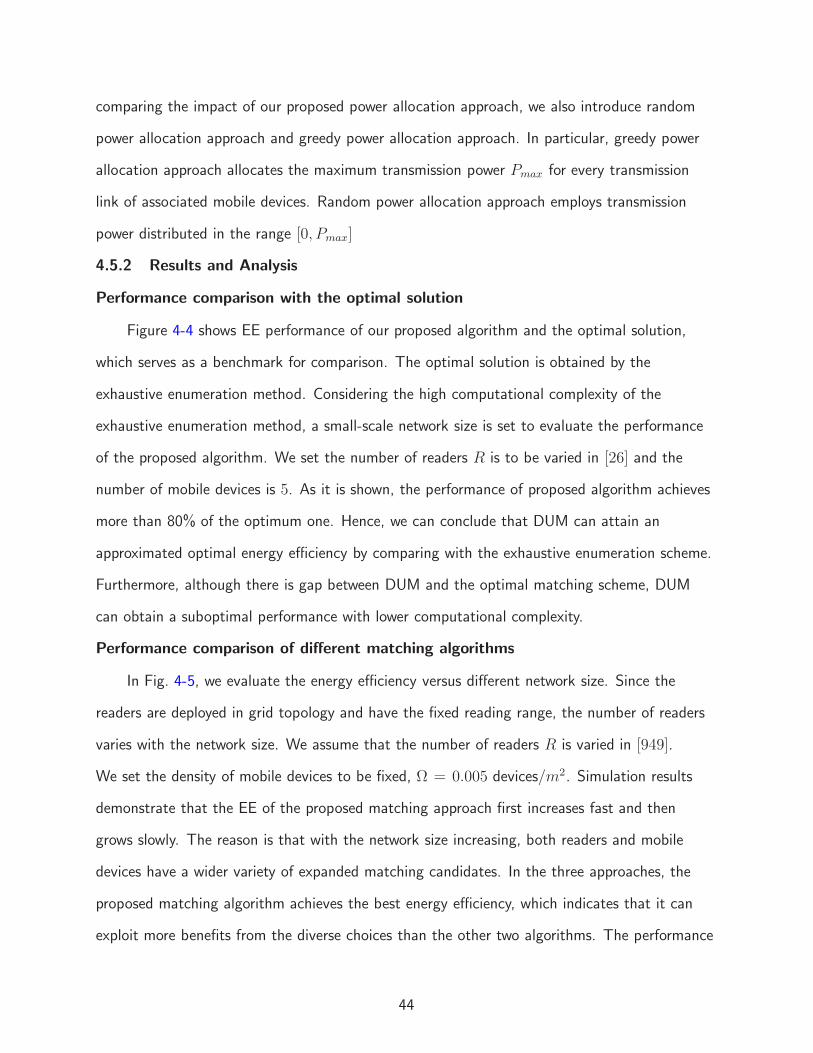
Performance comparison with the optimal solution
Figure 4-4 shows EE performance of our proposed algorithm and the optimal solution,
which serves as a benchmark for comparison. The optimal solution is obtained by the
exhaustive enumeration method. Considering the high computational complexity of the
exhaustive enumeration method, a small-scale network size is set to evaluate the performance
of the proposed algorithm. We set the number of readers R is to be varied in [26] and the
number of mobile devices is 5. As it is shown, the performance of proposed algorithm achieves
more than 80% of the optimum one. Hence, we can conclude that DUM can attain an
approximated optimal energy efficiency by comparing with the exhaustive enumeration scheme.
Furthermore, although there is gap between DUM and the optimal matching scheme, DUM
can obtain a suboptimal performance with lower computational complexity.
Performance comparison of different matching algorithms
In Fig. 4-5, we evaluate the energy efficiency versus different network size. Since the
readers are deployed in grid topology and have the fixed reading range, the number of readers
varies with the network size. We assume that the number of readers R is varied in [949].
We set the density of mobile devices to be fixed, Ω = 0.005 devices/m2. Simulation results
demonstrate that the EE of the proposed matching approach first increases fast and then
grows slowly. The reason is that with the network size increasing, both readers and mobile
devices have a wider variety of expanded matching candidates. In the three approaches, the
proposed matching algorithm achieves the best energy efficiency, which indicates that it can
exploit more benefits from the diverse choices than the other two algorithms. The performance
44

of stable marriage matching algorithm is not as good as the proposed algorithm since it
cannot update preference timely and ignores the benefits from the previous matching. The
performance of the reader-greedy approach is not as good as the other two algorithms since
it cannot fully exploit the diverse matching candidates and ignores the benefits from power
allocation process of data transmissions.
Comparison of power allocation approaches
Figure 4-6 shows the EE of diffident power allocation strategies. We employ the same
values of R and Ω as in the previous simulation. We set the maximum allocated power to
Pmax = 30dBm. The result demonstrates that proposed power allocation approach achieves
the best EE and outperforms the random power allocation approach and the greedy power
allocation approach by 375% and 452% for R = 25, respectively. The random power allocation
gets the second best performance since it has higher probability to take full advantage
of the available power. We also find that benefits from the increasing power is not able
to compensate for the EE loss. The greedy power allocation approach achieves the worst
performance due to two reasons. The first is that the power allocation is fully ignored since
it employs the fixed power. The second is that increasing transmission power has higher
probability for passing the point for the optimum EE. Thus, increasing transmission power does
not really improve the EE, rather causes significant EE loss.
EE with respect to the density of mobile devices
In Fig. 4-7, EE of different algorithms with respect to the varied density of mobile devices
are evaluated. In this evaluation study, the density of mobile devices varying within [5 35] and
the step size is 5. We set the number of readers to R = 36. The result demonstrates that the
impact of the density of mobile devices is evident only at lower values. When the density of
mobile devices is not large, the EE grows almost linearly with the increasing density of mobile
devices. Then, the EE stays nearly constant even when the density of mobile devices continues
to increase. The reason is that when the density of mobile devices is small, the system gains
more benefits from the density of mobile devices. Once density of mobile devices exceeds the
45
point for the optimum EE, the reader can always be matched with perfect mobile devices to
obtain the best EE.
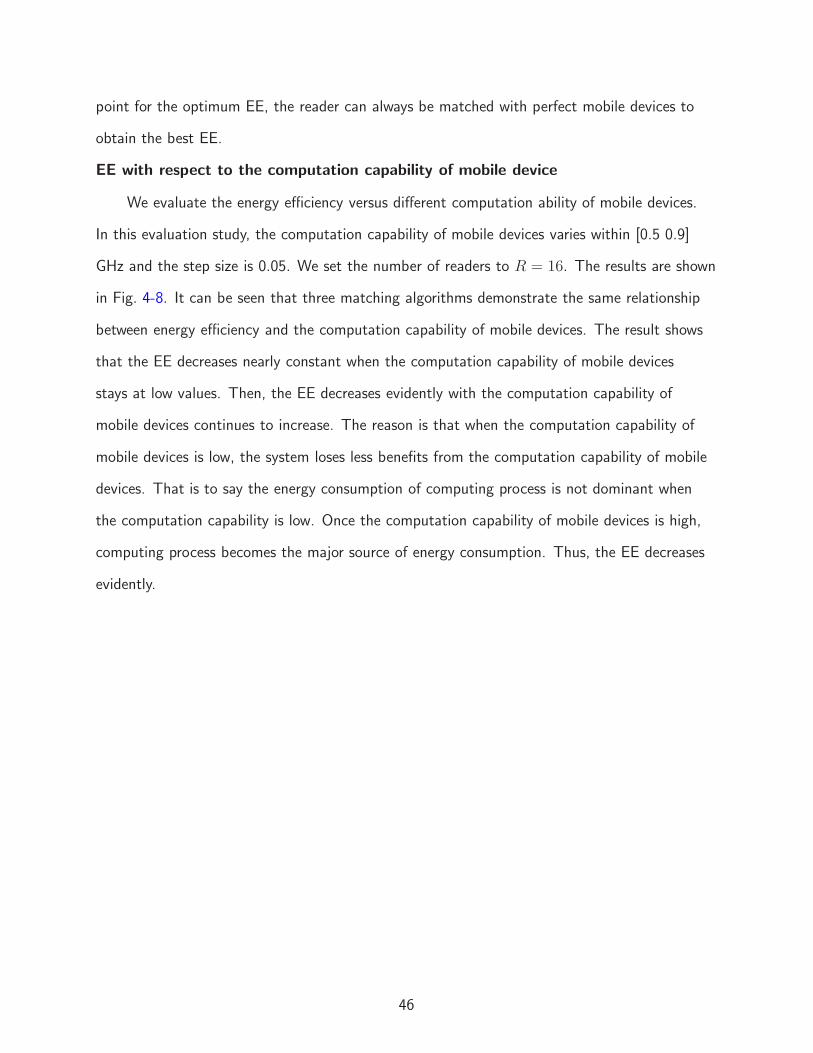
EE with respect to the computation capability of mobile device
We evaluate the energy efficiency versus different computation ability of mobile devices.
In this evaluation study, the computation capability of mobile devices varies within [0.5 0.9]
GHz and the step size is 0.05. We set the number of readers to R = 16. The results are shown
in Fig. 4-8. It can be seen that three matching algorithms demonstrate the same relationship
between energy efficiency and the computation capability of mobile devices. The result shows
that the EE decreases nearly constant when the computation capability of mobile devices
stays at low values. Then, the EE decreases evidently with the computation capability of
mobile devices continues to increase. The reason is that when the computation capability of
mobile devices is low, the system loses less benefits from the computation capability of mobile
devices. That is to say the energy consumption of computing process is not dominant when
the computation capability is low. Once the computation capability of mobile devices is high,
computing process becomes the major source of energy consumption. Thus, the EE decreases
evidently.
46

Figure 4-4. Comparison to the optimal solution.
Figure 4-5. Comparison of different matching algorithms.
47

Figure 4-6. Comparison of different power allocation approaches.
Figure 4-7. EE under different density of mobile devices.
48

Figure 4-8. EE under different computation capability of mobile device.
49

CHAPTER 5SPATH: A SAFE WALKING NAVIGATION SERVICE
5.1 Backgroud
Public safety is one of the most important concerns in the United States. According
to the annual compilation of crimes reported by the law enforcement agencies, there were
estimated 1,247,321 violent crimes committed in 2017. Moreover, there were estimated
319,356 robberies all the year round [67]. That is to say, nearly 38 robberies were reported
every hour. In fact, most robberies occur in urban areas, especially at night. To improve
public safety in cities, technology companies have already taken steps to design safety related
applications. Recently, Mobile Software AS designs a new application, bsafe [68], which
allows a user to add contacts as the guardians. When an imminent danger is perceived, a
user can activate this application, which automatically sends alert to the recorded guardian.
Similarly, Safe Apps Ltd. launches a StaySafe [69], which involves a new safety feature, called
timed sessions. A user can set check-in intervals as their estimated session time. Once the
user misses the session time deadline, this application will notify the corresponding contacts.
However, all those applications are the post-crime services. Thus, how to offer a pre-crime
warning is still an open problem.
Open crime dataset is considered by many researchers recently to identify the safest and
shortest path for users [6, 7, 8, 9]. In [6], Galbrun et al. utilize a crime probability model based
on the existing crime data to measure the safety status of a walking path. Given historical
crime locations, the estimated density of crime at a point can be quantified with Gaussian
Kernel Density Estimation (KDE). Then, the estimated crime density of a walking path can
be measured by aggregating crime occurring points on walking path. Goel et al. improve
Galbrun’s model in [7]. They design a safety model based on both the static and dynamic
information. The static information is composed of crime related dataset belongs to different
administrations. Dynamic information involves feedback received from users (crowdsourced).
Users update the safety status of any point on their walking paths. Different from previous
50

works, Garvey et al. [9] integrate pre-crime warning and post-crime support to design a novel
safety application called PASSAGE. PASSAGE not only recommends safe paths to a user but
also allows the user to share her current walking location with a friend.
Figure 5-1. System architecture.
However, the previous models suffer from the following limitations: (a) The historical
crime data may be outdated; (b) The crime estimation model is not adapted well to small time
scale; (c) Crowdsourced data cannot guarantee sufficient feedback; (d) User feedback based
on personal experience is not accurate. In order to overcome these limitations, we propose
to utilize street cameras with high resolution and wireless communication capability as the
“remote eye” since street cameras has been widely deployed for many applications in smart
cities. For example, Moscow has installed 160,000 outdoor cameras to support several public
services such as trash removal, traffic management and crime monitoring [70]. Chicago has
developed two public safety related programs, which has deployed over 32,000 cameras in the
city in order to respond to traffic-related issues, monitor large crowds such as parades, and
validate calls for fires or EMS [71].
Even though utilizing street cameras can overcome the limitations of previous design,
long latency caused by the transmissions of large volumes of videos will impose restrictions
on the use of these cameras. Edge computing provides a popular solution to this issue, which
pairs data source with powerful edge servers [72, 73, 74]. Such servers are deployed at the
proximity of data source to perform task computing or processing, data storage, and caching.
51

For example, Rodrigues et al. [74] present a method by utilizing virtual machine migration
and transmission power control to minimize service delay. As a result, their approach based
on simultaneously lowering the time for transmission and the time for processing does reduce
service delay significantly, particularly when the application involves with transmitting a
large amount of data. Furthermore, in order to deal with communication and computing
demands at edge more efficiently and conveniently, recent works propose a novel idea, which
leverages vehicles as a service [75, 33, 34, 76, 77, 78]. Apart from the edge computing
characteristics, such as proximity to end users, computing, and storage, employing vehicles
as a service distinguishes itself from dense geographical distribution of communication and
computing devices and support for mobility [75]. In [34], Ding et al. propose a V-CCHN
(Vehicular Cognitive Capability Harvesting Network) architecture. In this work, Cognitive
Radio (CR) router enabled vehicles are employed to utilize harvested spectrum resources to
opportunistically transmit large volume of data. Furthermore, with the built-in computing
capability of CR routers, vehicles serve as edge cloud servers for local data processing and
aggregation to solve network congestion problems and reduce long latency caused by the
long-distance transmissions for large volumes of data.
Inspired by all previous works, we propose SPATH to effectively find the safest walking
path in smart cities (as shown in Figure 5-1). The potential walking path of a user is divided
into several road segments. To indicate the estimated safety status, each road segment is
labeled by a numerical value, namely crime index. We utilize the historical crime data and
kernel density estimation to estimate the crime index of each road segment. Wireless street
cameras are employed to capture the street view of each road segment to provide fresh
on-time street safety status. Based on the crime index, the captured videos are transmitted
through the cellular infrastructure to users for identifying the safety status. It is reasonable
to consider the slowly moving and parked vehicles (such as connected and autonomous
vehicles) have plentiful and underutilized computing resources, which can be used to provide
public services [75, 79, 34]. In order to handle the huge volume data of captured videos
52
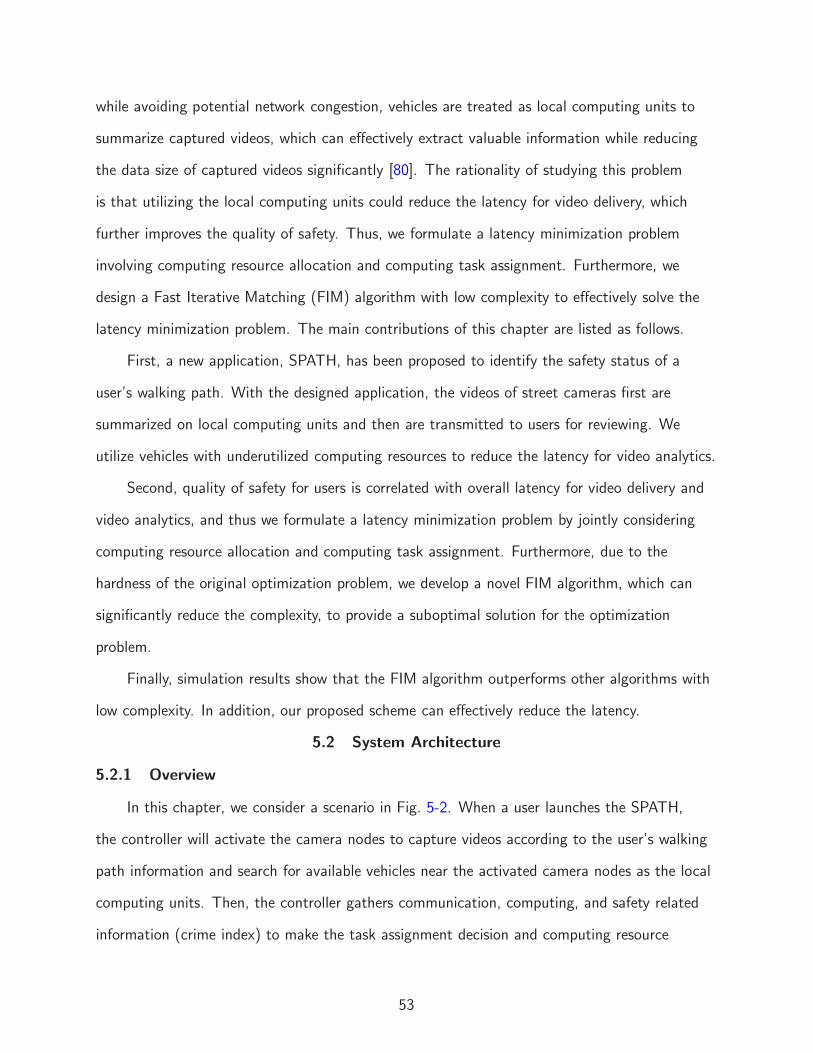
while avoiding potential network congestion, vehicles are treated as local computing units to
summarize captured videos, which can effectively extract valuable information while reducing
the data size of captured videos significantly [80]. The rationality of studying this problem
is that utilizing the local computing units could reduce the latency for video delivery, which
further improves the quality of safety. Thus, we formulate a latency minimization problem
involving computing resource allocation and computing task assignment. Furthermore, we
design a Fast Iterative Matching (FIM) algorithm with low complexity to effectively solve the
latency minimization problem. The main contributions of this chapter are listed as follows.
First, a new application, SPATH, has been proposed to identify the safety status of a
user’s walking path. With the designed application, the videos of street cameras first are
summarized on local computing units and then are transmitted to users for reviewing. We
utilize vehicles with underutilized computing resources to reduce the latency for video analytics.
Second, quality of safety for users is correlated with overall latency for video delivery and
video analytics, and thus we formulate a latency minimization problem by jointly considering
computing resource allocation and computing task assignment. Furthermore, due to the
hardness of the original optimization problem, we develop a novel FIM algorithm, which can
significantly reduce the complexity, to provide a suboptimal solution for the optimization
problem.
Finally, simulation results show that the FIM algorithm outperforms other algorithms with
low complexity. In addition, our proposed scheme can effectively reduce the latency.
5.2 System Architecture
5.2.1 Overview
In this chapter, we consider a scenario in Fig. 5-2. When a user launches the SPATH,
the controller will activate the camera nodes to capture videos according to the user’s walking
path information and search for available vehicles near the activated camera nodes as the local
computing units. Then, the controller gathers communication, computing, and safety related
information (crime index) to make the task assignment decision and computing resource
53
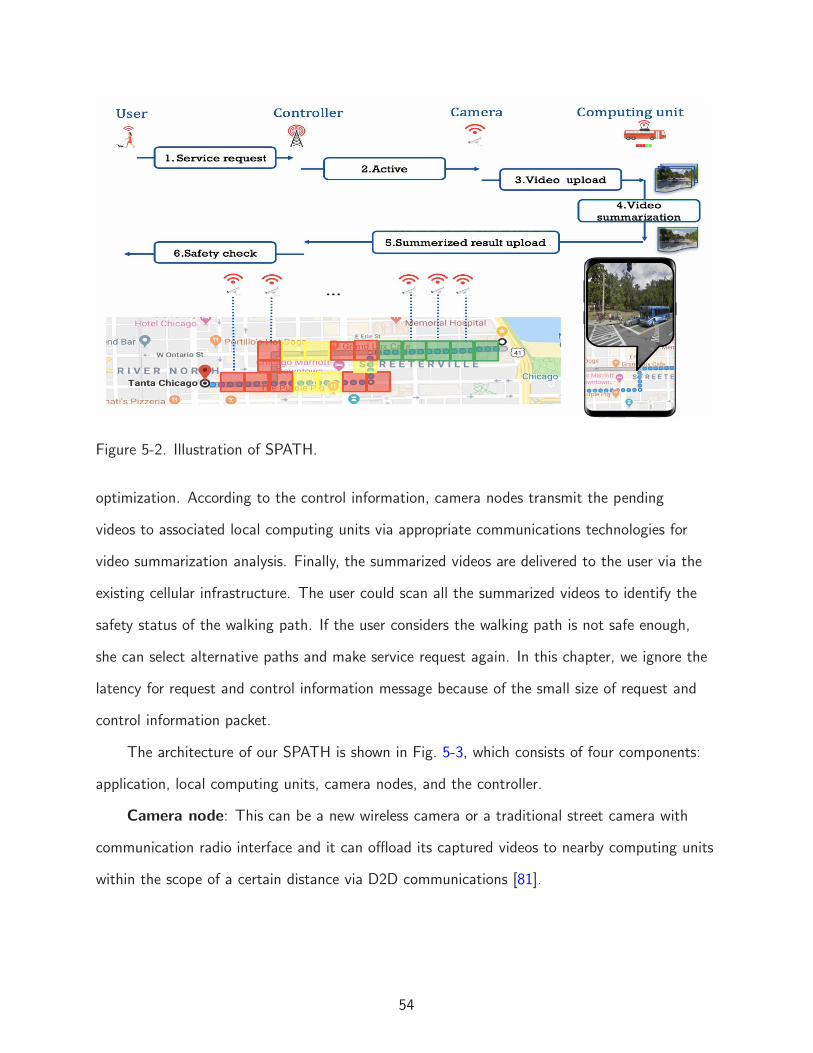
Figure 5-2. Illustration of SPATH.
optimization. According to the control information, camera nodes transmit the pending
videos to associated local computing units via appropriate communications technologies for
video summarization analysis. Finally, the summarized videos are delivered to the user via the
existing cellular infrastructure. The user could scan all the summarized videos to identify the
safety status of the walking path. If the user considers the walking path is not safe enough,
she can select alternative paths and make service request again. In this chapter, we ignore the
latency for request and control information message because of the small size of request and
control information packet.
The architecture of our SPATH is shown in Fig. 5-3, which consists of four components:
application, local computing units, camera nodes, and the controller.
Camera node: This can be a new wireless camera or a traditional street camera with
communication radio interface and it can offload its captured videos to nearby computing units
within the scope of a certain distance via D2D communications [81].
54

Local computing unit: This can be a moving or parking vehicle with sufficient
computing and storage capability and it can perform video summarization task. Each vehicle
can be matched with several camera nodes to summarize videos.
Controller: This is a static facility, which can be a base station or a roadside unit (RSU)
or an access point (AP). It collects communication and computing information from camera
nodes and vehicles. Based on the collected information and the crime index for each video
task, it makes the task assignment decision and optimizes the computing resource.
Application: Application is installed on the user’s mobile device. A user can use it
to navigate, scan the summarized videos of the walking path, and make service request for
alternative paths.
Controller
Camera
Computing capacity
Figure 5-3. Illustration of video summarizations and transmissions..
5.2.2 System Model
Denote the set of the camera nodes as C = c1, c2, · · · , ci, · · · , cn, the i-th camera
node by ci. Local computing units are indexed as V = v1, v2, · · · , vj, · · · , vm, the j-th
local computing unit by vj . In this chapter, we consider a widely used task model to describe
video summarization task Di, i.e., Di=(αi,βi,I(ci)), where αi stands for required CPU cycle
of the task Di, and βi denotes the data size of computing task Di to be delivered toward the
comping unit and I(ci) is the crime index of each task. Crime index indicates the significance
55

of each task since the larger crime index, the higher probability of observing a crime incident.
Then, we discuss communication, computing, and crime index model, which will be used in the
subsequent development.
Communication Model
In this chapter, we consider adopt orthogonal channels to support the data transmissions
between camera nodes and local computing units. We assume camera nodes communicate
with local computing units via D2D links and computing units transmit summarized videos
to the user via cellular links. The data rate for the camera nodes offloading tasks to the
associated computing units can be obtained as follows:
ri,j = Wi,j log2
(
1 +pihi,j
N0
)
, (5-1)
where Wi,j indicates the allocated bandwidth and hi,j denotes the channel gain between the
camera ci and the computing unit vj. Furthermore, pi is the transmission power of camera
node ci, and N0 is the noise power. We assume the mobility of local computing units is low
and the offloading time is relative short, thus hi,j is a constant.
The transmission latency for transmitting the task Di from camera node ci to computing
unit vj is therefore given by
tTi =βi
Wi,j log2
(
1 +pihi,j
N0
) . (5-2)
Similar to previous works such as [82], this chapter ignores the transmission latency of
delivering summarized video from computing units to the user end, since the data size of
summarized videos is much smaller than the original videos.
Computing Model
In this chapter, we consider the difference of computing resource among local computing
units and denote the computing resource of local computing units as F = f0, f1, · · · , fj, · · · , fm.
We assume several camera nodes can share the computing resource of a local computing unit
56

during the video summarization process. Thus, the computing time of task Di can be written
as
tCi =αi
κi,jfj, (5-3)
where κi,j is the proportion of computing resource that computing unit vj allocated to
complete task Di.
Crime Index Model
Crime index is a numerical value, which is used to label each road segment to indicate
the estimated safety status. In this chapter, crime index is measured based on the historical
criminal activity probability and the estimated criminal activity probability. Thus, crime index
is proportional to the probability that a crime incident on each road segment is observed. In
general, the road segment with higher crime index are more dangerous because of the higher
probability of observing a crime incident. For example, road segments in the urban area of
Chicago [6] has a higher crime index since these road segments not only have been observed
with a large number of criminal activities according to the historical data, but also have a
high probability of observing a crime incident in the future based on the criminal activity
probability estimation. In this chapter, we apply Gaussian kernel density estimation to model
the estimated criminal activity probability density. Given n points of crime locations are marked
as (qx,1, qy,1), (qx,2, qy,2), · · · , (qx,n, qy,n), the density of crime at a location (lx, ly) can be
quantified as follows [6]:
f(lx, ly) =1
nσ2
n∑
i=1
1
2πexp
(
−‖lx − qx,i‖2 + ‖ly − qy,i‖22σ2
)
, (5-4)
where σ is a parameter that controls the smoothness of the density estimation, which can
be determined by the Scott’s rule [83]. We denote the set of the road segments as S =
s1, s2, · · · , sk, · · · , sK, the k-th road segments by sk. Therefore, we can obtain the crime
57

index of road segment sk by
I(sk) = − log(
ǫ(1 − P hsk) + (1− ǫ) (1− Psk)
)
, (5-5)
where Psk =∫ eU
x,k
eLx,k
∫ eUy,k
eLy,k
f(lx, ly)dlxdly is the estimated criminal activity probability and
eLx,k,eUx,k,e
Ly,k, e
Uy,k are edge positions for road segments sk. P
hsk
denotes the historical criminal
activity probability. ǫ is the weighting factor. Therefore, for each camera node ci located in the
road segment sk, the crime index can be written as
I(ci) = I(sk), (5-6)
which means all camera nodes located in the same road segment sk has the same crime index.
The main notations adopted in this chapter are presented in Table 6-1
Table 5-1. Symbols and definitions
Symbol DefinitionC Set of camera nodesB Set of local computing unitsS Set of road segmentsDi Video summarization task for camera node cici i-th camera nodevj j-th computing unitsk k-th road segmentpi Transmission power for camera cihi,j Channel gainfj Computing resource of local computing unit vjN0 Noise powerαi Amount of the taskβi Data size of computing taskWi,j BandwithtTi Transmission latency for video summarization task Di
tCi Computing latency for video summarization task Di
f(lx, ly) Probability density of crimes at location (lx, ly)I(sk) Crime index of road segment skǫ Weighting factor
58

5.3 Problem Formulation
By leveraging communication, computing, and storage (CCS) capability, together with the
crime index model proposed in the previous section, we design our SPATH by formulating a
latency minimization problem considering computing task assignment and computing resource
optimization. We first discuss several constraints for the latency minimization problem.
Task Assignment
To be specific, we define the integral decision matrix x = (xi,j) with xi,j ∈ 0, 1, where
xi,j = 1 indicates camera node ci is associated with computing unit vj for video summarization
while xi,j = 0 otherwise. Since we assume the captured video cannot be split, the camera node
ci can only be matched with one computing unit. This matching constraint can be written as
follows:
∑
j∈V
xi,j ≤ 1. (5-7)
Maximum Computing Power Limitation
In this chapter, we consider the total amount of computing resource assigned to each task
placed on computing unit vj cannot exceed its limitation, that is,
∑
i∈C
xi,jκi,j ≤ 1. (5-8)
Maximum Communication Channel Limitation
We consider each computing unit has limited available frequency sub-channels to
communicate with camera nodes, we introduce the constraint as
∑
i∈C
xi,j ≤ Q. (5-9)
Safety Guarantee
We consider that if a camera node is associated with a computing unit for video
summarization, the status of this road segment is safest for a user since the user can obtain
59

the fresh safety information. Thus, we redefine the crime index of selected camera node is
I(ci) = 0. In order to guarantee the safety of a user, we introduce the crime index requirement
for a user’s walking path as
∑
i∈C
(1− xi,j)I(ci) ≤ Ith. (5-10)
Latency Minimization
Under the above setup, we pursue a latency minimization problem by jointly considering
computing resource allocation and computing task assignment, which is formulated as
OPT :minx,κ
∑
i∈C
xi,j(tTi + tCi ) (5-11)
s.t.
∑
i∈C
xi,jκi,j ≤ 1
∑
i∈C
xi,j ≤ Q
∑
i∈C
(1− xi,j)I(ci) ≤ Ith
∑
j∈V
xi,j ≤ 1
xi,j ∈ 0, 1
It is clear that the proposed latency minimization problem is a mixed integer non-linear
programming (MINLP) problem since it contains both binary variables x and continuous
variables κ. In the next section, we adopt matching theory with low complexity to find an
approximate solution to the proposed optimization problem because of the hardness of the
original optimization problem.
5.4 Algorithm
In this section, a FIM algorithm is proposed to solve the optimization problem, since the
MINLP optimization problem has a high complexity with the increasing number of camera
nodes and computing units. The objective function can be rewritten as follows:
60

g(κ,x) =∑
i∈C
xi,j(βi
ri,j+
αi
κi,jfj). (5-12)
We consider the original problem can be decoupled into two sub-problems, computing
resource optimization problem and task assignment problem. Given xi,j = xi, which means
xi,j is fixed, the original latency minimization problem in (6-8) is converted as a computing
resource optimization problem, which is a convex problem. Therefore, optimal solution, κ∗i,j , of
computing resource optimization can be obtained by adopting the Karush-Kuhn-Tucker (KKT)
conditions. With the optimal solution, κ∗i,j , obtained from the computing resource optimization
problem, the latency minimization problem is converted as task assignment problem, which is
an integer programming problem. Then, we adopt the matching theory to obtain the solution.
5.4.1 Computing Resource Optimization
We consider the OPT with the following OPT-RA when xi = xi, a fixed value.
OPT-RA :minκ
g(κ, x) =∑
i∈C
xi,j(βi
ri,j+
αi
κi,jfj) (5-13)
s.t.
∑
i∈C
xi,jκi,j ≤ 1
Therefore, the Hessian matrix of the OPT-RA can be derived as follows:
H =
∂2g
∂2κ1,j
∂2g
∂κ1,j∂κ2,j. . . ∂2g
∂κ1,j∂κn,j
∂2g
∂κ2,j∂κ1,j
∂2g
∂2κ2,j. . . ∂2g
∂κ2,j∂κn,j
......
. . ....
∂2g
∂κn,j∂κ1,j
∂2g
∂κn,j∂κ2,j. . . ∂2g
∂2κn,j
(5-14)
61

Further, we can obtain each specific element of the Hessian matrix is:
∂2g
∂κp,j∂κq,j
=
2αi
κ3
i,jfjif p = q
0 otherwise
(5-15)
It is observed that all parameters in (5-15) are positive since 2αi
κ3
i,jfj≥ 0. We conclude that
OPT-RA is convex because the Hessian matrix H is a positive definite matrix [84]. Since the
constraints are linear, optimal solution of OPT-RA can be obtained with the KKT conditions.
We introduce the Lagrange function of OPT-RA according to the previous analysis,
which can be written as follows:
L(κ,γ) =∑
i∈C
xi,j(βi
ri,j+
αi
κi,jfj) +
∑
j∈V
γj(∑
i∈Cj
κi,j − 1), (5-16)
where γ = (γ1, · · · , γm) are the Lagrange multipliers corresponding to the inequality
constraints. Since Slater’s condition holds for OPT-RA, then the KKT conditions provide
necessary and sufficient conditions for optimality [85]. If κ∗ and γ∗ is the optimal point with
zero duality gap, then the gradient for L(κ,γ) must vanish at point κ∗. Therefore, we can
obtain:
∇(∑
i∈C
xi,j(βi
ri,j+
αi
κ∗i,jfj
)) +∑
j∈V
γ∗j∇(
∑
i∈Cj
κ∗i,j − 1) = 0, (5-17)
γ∗j (∑
i∈C
xi,jκi,j − 1) = 0.
Moreover, we can derive the optimal value of κ∗i,j form (5-17), which can be written as follows:
κ∗i,j =
√αi
∑
i∈C
√
xi,jαi
. (5-18)
5.4.2 Task Assignment
After obtaining the optimal computing resource allocation, we develop an algorithm based
on the matching theory [86] to solve the task assignment problem.
62

To better describe a matching, the preference lists of agents should be defined. Each
agent holds a preference list to opposite group. All the actions, such as proposal, acceptance,
and rejection are according to the preference list. In this chapter, we establish each agent’s
preference list as follows.
Preferences of camera nodes
From the camera node’s perspective, each camera node seeks the minimum of its
transmission time to a local computing unit. Therefore, we propose a utility function for a
camera node to form its preference list among computing units as follows:
φCi,j =
βi
Wi,j log2
(
1 +pihi,j
N0
) . (5-19)
Thus, the preference list ≻Ci,j of camera node ci can be constructed by using (5-19).
Preferences of computing units
The preference list of local computing units can be established according to the time
cost of the video summarization for a matched camera node. The utility function for a local
computing unit can be calculated as follows:
φVi,j =
αi
κi,jfj. (5-20)
According to the above utility function, the preference list for computing unit vj among camera
nodes in the opposite group can be constructed as ≻Vj,i.
5.4.3 Fast Iterative Matching (FIM) algorithm
We now introduce our proposed FIM algorithm, which is illustrated Algorithm 0. The
FIM algorithm operates in an iterative way until achieving the stability. Initially, each camera
node forms its preference list ≻Ci,j . The whole FIM algorithm consists of two major phases: one
is for matching and the other is for optimizing. At the beginning of matching in each round,
each camera node ci proposes to its most preferred computing unit vj and removes vj from its
preference list ≻Ci,j. When receiving ci’s proposal, vj may face two conditions: either enough
available communication channels for the transmission of ci’s video have been found or there
63

are not enough available channels to support the ci’s video transmission. Computing nodes
vj first forms its preference list ≻Vi,j with the optimized computing resource, which can be
calculated by (5-18). If vj finds enough available communication channels to support the video
transmission, it accepts the most preferred proposal and the matched camera node is removed
from unmatched set Cun. If vj does not find enough communication channels to support its
video transmission, it discards the worst camera node and the discarded camera node is added
to the unmatched set Cun. At the end of each round, if the constraint (5-10) is not satisfied,
then camera nodes conduct next iteration. When there are no available communication
channels for all computing units in the new iteration, all computing units discard the camera
nodes with the smallest crime index. The matching and optimizing process iterates until safety
related constraint (5-10) is satisfied, or all cameras are matched.Algorithm 5.1. FIM Algorithm
1: procedure FIM(≻Ci,j)
2: Set Qj = Q for all vj ⊲ Matching Construction;3: Construct set Cun,set Cun=C;4: for each ci ∈ Cun do ⊲ Matching;5: Proposes to the first vj in its preference list and remove vj from ≻C
i,j ;6: end for7: for vj ∈ V do8: Forms its preference list ≻V
j,i with the κ∗i,j by (5-18).
9: if Qj > 0 then10: vj keeps the most preferred cpi among proposals;11: Removes c∗i from Cun12: Qj = Qj − 113: else14: vj rejects the worst cdi and keeps the rest;15: Add cdi to Cun16: end if17: end for18: if constraint (5-10) is not satisfied then ⊲ Constraint Check;19: if Qj > 0 for any vj then20: Go back to step 4;21: else22: for vj ∈ V do23: Discards cdi with the smallest safety index24: Go back to step 4;25: end for
64

26: end if27: end if28: end procedure
5.5 Performance Evaluation
In this section, we evaluate the performance of the proposed scheme in three aspects:
(i) The comparison among different task assignment schemes; (ii) The impact of available
computing power; (iii) The impact of key parameters, such as the data size of videos and
the bandwidth of communication channels. We introduce the simulation setup at first. Then
extensive simulations are provided and analyzed.
5.5.1 Simulation Setup
We consider that the camera nodes are placed in the grid topology and a group of
local computing units are randomly deployed. We assume the communication range of local
computing units is up to 100 m. The data size and computing amount of tasks follow uniform
distribution with a mean value of 5 MB and 1 Gigacycles, respectively [87]. The computing
resources of computing units are distributed within the range [10, 20] GHz. The channel fading
of the communication links is modeled by the complex normal distribution, CN (0, 1) [88].
The FIM, proposed in this chapter, is compared with two task assignment schemes:
Greedy assignment scheme: each camera node sends the proposal to match with the
most powerful computing unit in its communication range. If a computing unit has enough
communication channels to support all camera nodes, it will hold all video summarization
task. If the received proposals have reached the limitation, the computing unit will accept the
proposal according to the safety index. The computing resource allocation for each computing
unit is according to (5-18).
Random assignment scheme: camera nodes match with computing units randomly. If the
communication limitation is reached, computing units are matched with camera nodes with
respect to the safety index. The computing resource optimization is carried out according to
(5-18).
65

5.5.2 Results and Analysis
Comparison among different task assignment schemes
The performance comparison among our FIM, greedy scheme, and random scheme is
illustrated in Fig. 5-4. We let the number of camera nodes vary in [5, 25]. The density of
the computing nodes is set to be a constant value with respect to the number of camera
nodes. Results in Fig. 5-4 demonstrate that the proposed FIM achieves significantly better
performance over the other two schemes. This is because the available number of computing
units for each camera node is increasing with the network size increases. Therefore, FIM
algorithm could exploit more benefits from the diverse choices. However, greedy and random
schemes ignore the possible gain from the increasing number of computing units. Moreover,
resource optimization for FIM can enhance the gain from diverse choices, since the matching
choice is based on the result of resource optimization. Noticing that resource optimization
can also achieve performance gain for greedy and random schemes. However, the benefit of
resource optimization does not compensate for the loss of matching scheme.
Impact of available computing power
We further compare the performance of the FIM algorithm with two heuristic schemes
under different available computing power. We set the number of camera nodes to 15 and
the computing power in each local unit to be varying in [2, 10] Gigacycles. Figure 5-5 shows
that FIM scheme achieves significantly higher performance gain over the other two schemes,
particularly when the number of computing units is small. Noticing that FIM is introduced
to adjust the matching choice according to available computing power when computing
resource is insufficient, it is not surprising that a more significant performance gain can be
observed when the computing power is smaller. Moreover, the latency of all schemes is reduced
slowly when the number of computing units is large. The reason is that sufficient computing
resource makes all task assignment schemes achieve less benefit with respect to the variation of
computing resource.
66

Impact of data size
In Fig. 5-6, we investigate the latency of different task assignment schemes with respect
to the varying data size of captured videos. The parameter settings are the same as those in
Fig. 5-5 and the data size of the video varies within [1, 9] MB. The results shown in Fig. 5-6
demonstrate that three algorithms have the same relationship between latency and the data
size of videos. The result shows that the larger of the data size, the longer of the latency.
The result also demonstrates that the impact of the data size is evident, especially at large
data size. The reason is that when the data size is large, FIM algorithm not only reduces the
latency in terms of the choice of computing units but also achieves significant benefits from
the transmissions of videos.
Impact of bandwidth
We also consider the impact of the bandwidth of communication channels. In this
evaluation, The parameter settings are the same as those in Fig. 5-5 and the bandwidth of
communication channels is set to the range [0.5, 2.5] MHz. The results shown in Fig. 5-7
demonstrate that the performance gaps of three task assignment schemes are narrowing along
with the increasing of bandwidth. When the communication resource is sufficient, FIM can
only achieve benefits from computing resource and the loss of greedy and random schemes
is less for transmissions of videos. Fig. 5-7 also shows that the impact of bandwidth is more
significant when bandwidth is small. The proposed FIM can achieve 85.6% better performance
compared with random assignment scheme and 87.3% compared with greedy assignment
scheme when bandwidth is 1 MHz. The reason is that when bandwidth is small, FIM can
obtain more benefit from better communication channels.
67
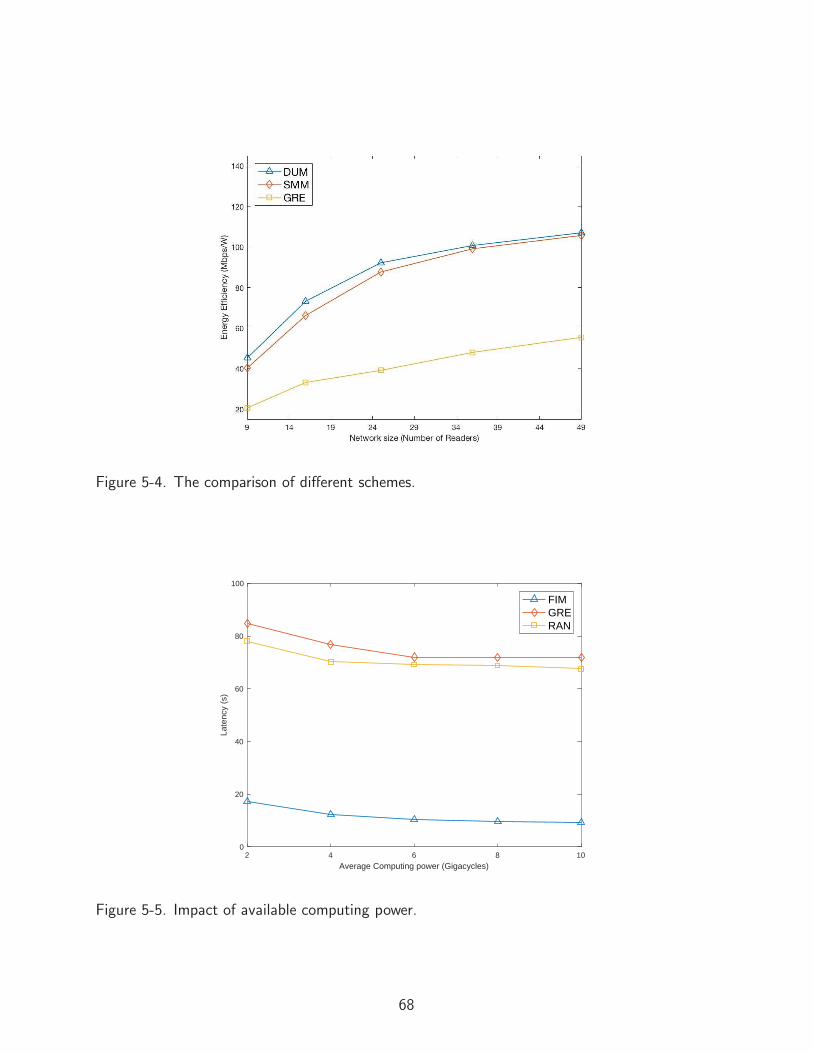
Figure 5-4. The comparison of different schemes.
2 4 6 8 10
Average Computing power (Gigacycles)
0
20
40
60
80
100
Late
ncy
(s)
FIMGRERAN
Figure 5-5. Impact of available computing power.
68

1 3 5 7 9
Average Data Size (MB)
0
20
40
60
80
100
120
140
Late
ncy
(s)
FIMGRERAN
Figure 5-6. Impact of data size
0.5 1 1.5 2 2.5
Bandwidth (MHz)
0
20
40
60
80
100
120
140
Late
ncy
(s)
FIMGRERAN
Figure 5-7. Impact of bandwidth.
69

CHAPTER 6VISS: VEHICLE BASED INTELLIGENT SURVEILLANCE SYSTEM
6.1 Background
As cities and towns expand, safety in public areas such as parks, shopping streets,
and downtowns becomes more and more important. How to monitor there public area and
guarantee the safety of citizens and visitors are vital for cities. Video surveillance system is a
great security tool to keep city safe and local business thriving. Thus, more and more local
governments in the world are beginning to install surveillance cameras in public areas to help
improve the safety of cities. According to the security industry, Beijing installed more than
400k surveillance cameras in the public area to keep this supercity safe. Chicago establishes a
Homeland Security Grid, which utilizes more than 17,000 cameras and 600 miles of fiber optics
to capture street view of the city and processes the video in real time to detect dangerous
activities [89] .
Even though video surveillance system can help make public area hospitable for citizen
and visitors, drawbacks limit the use of video surveillance system. Due to the high cost of
deployment of video surveillance system, blind areas exist in most video surveillance systems.
Second, outdoor cameras can be damaged by weather or car accidents, which means the
local governments cost enormous maintenance fee to keep systems work well. Can we use the
low-cost method help to improve the safety of blind areas of video surveillance system?
With the development of sensing and communication, more and more vehicles have
installed dash cameras with communication interface. Therefore, vehicle based video
monitoring system is a potential solution to cover blind areas of fixed video surveillance
system with low maintenance cost. Actually, Substantial numbers of applications using
vehicle based monitoring system are emerging. Chen et.al. [90] design a system to utilize the
three-axis accelerometer and the GPS sensor embedded on vehicles to monitor road condition
when vehicles are traveling around the city. Li et.al. [91] apply vehicle based sensing system to
solve the large scale traffic sensing problem. They aggregate instant speed and position data,
70

which is sensed by each vehicle periodically, to monitor traffic condition. ParkNet is a system
design by Mathur et al. to solve the urban street-parking problem [92]. They utilize vehicles,
equipped with GPS receivers and a passenger-side-facing ultrasonic rangefinders, to determine
parking spot occupancy. However, utilizing vehicles to do the safety monitoring is challenging
with respect to the following consideration. First, the data size of the monitoring video is very
large, if all the vehicles upload monitoring video may cause the network congestions. Another
problem caused by the long distance transmission of video files is the long delay, which may
make the monitoring system not improve the safety. Second, recruiting a large number of
vehicles may result in large amount of payment for participants. Third, given equal attention to
each monitored area is an ineffective way to improve the public safety.
Figure 6-1. System architecture.
In order to deal with the problems mentioned above, we design a Vehicle based Intelligent
Surveillance System (VISS) to improve public safety in smart cities. In our design, vehicles
equipped dash cameras with wireless communication interface are recruited as the mobile
monitoring nodes to help monitor the blind areas of the exiting surveillance system. In order
to improve quality of safety, VISS has two major tasks. The first one is expanding the spatial
monitoring area to find potential victims. Thanks to the development of techniques for vision
based human activity recognition, VISS can extract potential victims from the monitoring
video files. The second task is that VISS recruits mobile monitoring nodes to monitor potential
71

victims as long as possible. Due to the high mobility of vehicles, VISS has an opportunity to
achieve potential victims searching and monitoring with less budget. Actually, each recruited
moving vehicle can cover multiple geographical regions, some can be used for potential victims
searching and others can be used for potential victims monitoring. On the other hand, slowly
moving or parked vehicles with sufficient computing capability are utilized as local computing
units to handle the long delay problem of video transmission. Therefore, we formulate two
optimization problems, i.e., spatial coverage maximization problem and temporal coverage
problem, involving mobile monitoring nodes recruitment and computing resource allocation. To
solve these optimization problems, a heuristic algorithm with low complexity is proposed. The
main contributions of this chapter are listed as follows.
First, a new system, VISS, has been proposed to improve public safety in smart cities.
With the designed system, two types of vehicles are utilized. Vehicles equipped dash cameras
are recruited as the mobile monitoring nodes to expand geographical monitoring regions
and extend monitoring time of potential victims. Another typed vehicles are utilized as local
computing units to detect potential victims and reduce transmission delay of videos.
Second, we formulate two optimization problems by jointly considering recruitment
decision and resource allocation. The spatial coverage maximization problem is related to
geographical regions expanding for potential victims searching. Another temporal coverage
problem is used to extend monitoring time of potential victims. In order to handle the hardness
of two optimization problems, a heuristic algorithm with low complexity is proposed to provide
a suboptimal solution.
Third, in the performance evaluation part, results demonstrate that the proposed
algorithm performs better compared to other algorithms.Furthermore, the proposed scenario
can significantly improve the spatial and temporal coverage with low budget.
6.2 System Architecture
The proposed VISS mainly include four components. We first present an overview of
VISS. Thereafter, corresponding models are explained in detail.
72
6.2.1 Architecture Overview
The overall architecture of the proposed VISS includes four parts: local computing units,
mobile monitoring nodes, controller, and data center.
Local Computing Unit
In this scenario, two types of vehicles are utilized. Slowly moving or parked vehicles with
sufficient computing capability are recruited as local computing units, which can perform video
analysis tasks to find the potential victims. Each local computing unit can be connected with
several mobile monitoring nodes to analyze videos.
Mobile Monitoring Nodes
Vehicles installed dash cameras with communication radio interface are the second typeof
vehicles, which can be the mobile monitoring nodes. If the regions of interest on their driving
path or drivers are interested to get credits to help monitor several regions of interest, vehicles
can apply to be the candidates of mobile monitoring nodes. Mobile monitoring nodes connect
with local computing units within a certain distance to offload captured videos via D2D
communications [81].
Controller
A base station or a roadside unit (RSU) belongs to the service provider can be the
controller. It collects applications of vehicles to be the mobile monitoring nodes, and monitors
the status of communication and computing resource. Based on the collected information,
controller makes recruitment decision and optimizes communication the computing resource
allocation.
Data Center
Data center is used to collect the analysis result from the local computing units and store
the result. It also can cooperate with local computing units to do the video analysis when the
workload of local computing units is too heavy.
Then, we present the working process of VISS. When public safety authority sends the
service request to the VISS, it works in the following steps.
73
Step1) public safety authority submits its request to the VISS.
Step2) Controller collects and information, such as blind areas of the fixed surveillance
system, crime data, and people distribution, to find the regions of interest. Then, the controller
spreads out the information of regions.
Step3) Vehicles interested to participate to help monitor will be registered as the
candidates of mobile monitoring nodes that submit corresponding information such as location
and credits for tasks.
Step4) Controller bases on the information of candidates, status of communication, and
computing resource to make recruitment decision and optimizes computing resource allocation
for each mobile monitoring node. Then, controller updates its database and sends the control
information to mobile monitoring nodes and local computing units.
Step5) Mobile monitoring nodes according to the control information to capture videos
and send videos to the assigned local computing units.
Step6) Local computing units first bases on the optimization information from controller
to allocate the computing resource for video tasks and do the video analysis. Second, local
computing units send analysis result back to the controller.
Step7) Controller according to the quality of analysis result pays credits for mobile
monitoring nodes, updates their trustworthiness score, and uploads the result to the data
center
Step8) The VISS sends the corresponding result to the public safety authority.
6.2.2 System Model
In the following section, the precise definition and models of VISS, which are used in the
subsequent development, are presented.
In this chapter, we assume that the VISS does the monitoring for a period of time T =
t1, · · · , to, and the set of candidates to be recruited as mobile monitoring nodes are denoted
asM = m1, m2, · · · , mi, · · · , mp, the i-th candidates of mobile monitoring node by mi.
Denotes the set of geographical regions of interests as R = r1, r2, · · · , rj, · · · , rq, the j-th
74
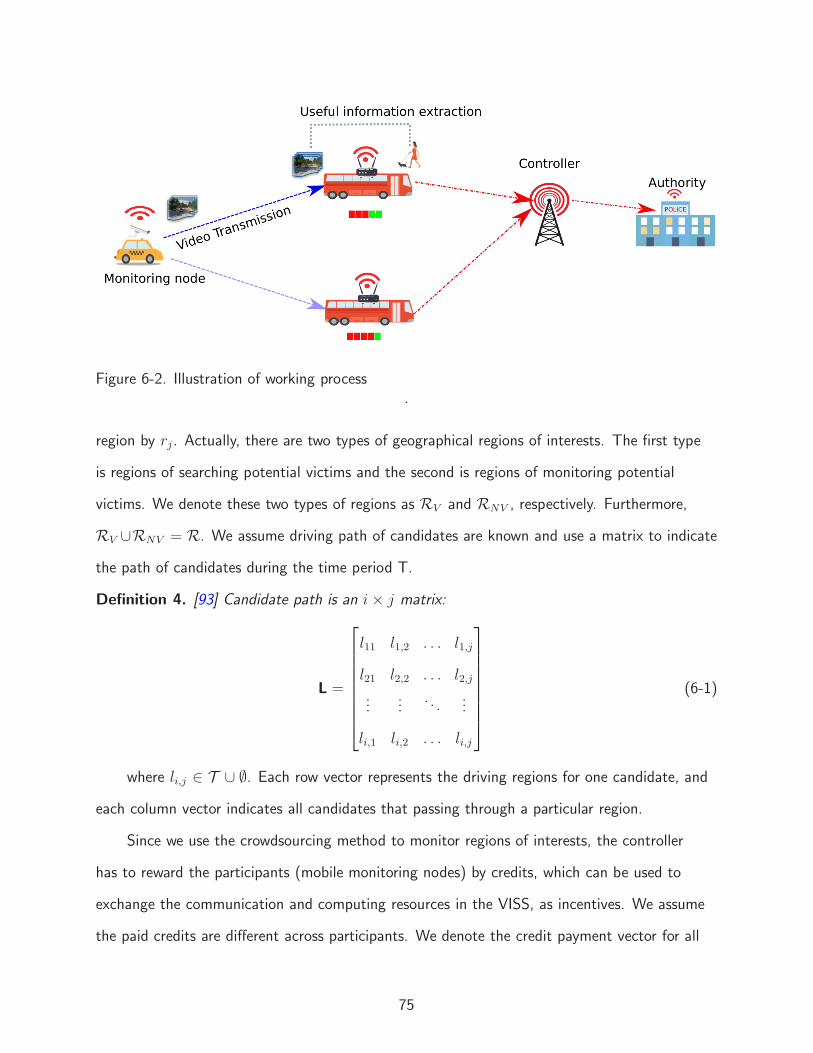
Controller
Monitoring node
Figure 6-2. Illustration of working process.
region by rj . Actually, there are two types of geographical regions of interests. The first type
is regions of searching potential victims and the second is regions of monitoring potential
victims. We denote these two types of regions as RV and RNV , respectively. Furthermore,
RV ∪RNV = R. We assume driving path of candidates are known and use a matrix to indicate
the path of candidates during the time period T.
Definition 4. [93] Candidate path is an i× j matrix:
L =
l11 l1,2 . . . l1,j
l21 l2,2 . . . l2,j...
.... . .
...
li,1 li,2 . . . li,j
(6-1)
where li,j ∈ T ∪ ∅. Each row vector represents the driving regions for one candidate, and
each column vector indicates all candidates that passing through a particular region.
Since we use the crowdsourcing method to monitor regions of interests, the controller
has to reward the participants (mobile monitoring nodes) by credits, which can be used to
exchange the communication and computing resources in the VISS, as incentives. We assume
the paid credits are different across participants. We denote the credit payment vector for all
75

participants as B= b1,1, b1,2, · · · , bi,j. Due to the limited budget, the overall credits paid to
participants must be limited.
Furthermore, the captured video by mobile monitoring nodes are sent to the local
computing units to analyze. Local computing units are labeled as C = c1, c2, · · · , ck, · · · , cs,
the k-th local computing unit by ck. This chapter adopts a commonly used computing task to
model captured video Vi,j, i.e., Vi,j=(αi,j,βi,j), where αi,j represents for required CPU cycle of
the video task Vi,j, and βi,j denotes the data size of Vi,j.
Definition of Spatial and Temporal Coverage
In this chapter, spatial and temporal coverage are two metrics related to quality of safety.
As we mentioned above, we are more interested in investigating how to find potential victims
fast and how to guarantee the safety of potential victims as much as possible. Spatial coverage
metric is related to the problem of finding the potential victims and temporal coverage metric
is related to the problem of monitoring potential victims. We also consider it adequate to cover
a geographic region with a single vehicle at a particular point of time.
Definition 5. [93] Spatial Coverage (SC) is the total percentage of geographical regions of
interests covered during the time period T. Formally, it can be defined as:
SC(xi,j) =
∑
j∈R∨i∈Mxi,j
|R| . (6-2)
where x = (xi,j) is an integral decision matrix with xi,j ∈ 0, 1. We assume xi,j = 1
indicates candidate node mi is recruited to monitor region rj during the time li,j while xi,j = 0
otherwise.
Definition 6. [93] Temporal coverage (TC) is the percentage of minimum covered time length
during the time period T for all geographical regions of interests covered. It can be formally
defined as:
TC(xi,j) =minj∈RV
|∪i∈Mxi,jli,j||T | . (6-3)
76

Communication and Computing Model
We assume the communication and computing process since time cost for transmission
and analysis is large. Captured video must be processed completely within limited time to
guarantee the safety of potential victims. In the transmission process, orthogonal channels
are adopted to transmit the captured video from mobile monitoring nodes to local computing
units. We consider mobile monitoring nodes communicate with local computing units though
D2D links. Local computing units send analysis result back to the controller via cellular links.
Thus, data rate between mobile monitoring node mi and connected local computing units ci
can be modeled as follows:
ri,j,k = Wi,j,k log2
(
1 +pihi,j,k
N0
)
, (6-4)
where Wi,j,k indicates the bandwidth and hi,j,k is the channel gain. Furthermore, pi is the
transmission power and N0 is the noise power. In this chapter, we utilize slowly moving or
parked vehicles as local computing units and the data transmission time is relatively short, thus
hi,j,k is a constant.
The time cost for the transmission of video task Vi,j from mobile monitoring node mi to
computing unit cj is therefore given by
DTi,j =
βi,j
Wi,j,k log2
(
1 +pihi,j,k
N0
) . (6-5)
In line with previous works as [82], the data size of analysis result significantly decreases
compared to the original data, we therefore ignore the transmission time cost of delivering
analysis result from local computing units via the controller to the data center.
This chapter takes into account the difference of computing capability among local
computing units. Accordingly, the computing capability of local computing units is denoted
as F = f1, f2, · · · , fk, · · · , fp. The computing capability on a local computing unit can be
shared by several mobile monitoring nodes. Consequently, the computing time cost of task Vi,j
can be written as
77

DCi,j =
αi,j
κi,j,kfk, (6-6)
where κi,j,k is the proportion of computing resource that computing unit ck is allocated to
complete task Vi,j.
Table 6-1. Symbols and description
Symbol DefinitionC Set of local computing unitsM Set of mobile monitoring nodesR Set of interested regionsVi,j Video captured by camera node ci at region rjmi i-th mobile monitoring noderj j-th interested regionck k-th rlocal computing unitpi Transmission power for camera cihi,j,k Channel gainfk Computing resource of local computing unit ckN0 Noise powerαi,j Amount of the taskβi,j Data size of computing taskWi,j,k Bandwith
6.3 Problem Formulation
As we mention above, the regions of interest consists of two types. The first one is the
regions with potential victims. The temporal coverage of regions with potential victims should
be maximized in order to guarantee the safety of the potential victims. The second type
is regions without potential victims. Maximizing the spatial coverage is the goal of regions
without potential victims since more potential victims can be found with the increased spatial
coverage of the whole area. Thus, with the system model, it is reasonable to formulate the
Spatial and Temporal Coverage problems as two optimization problems by jointly considering
computing resource allocation and mobile monitoring nodes selection, which is formulated as
78

STC: maxx,κ
SC(xi,j) (6-7)
minx,κ
TC(xi,j) (6-8)
s.t.
SC(xi,j) =
∑
j∈R ∨i∈Mxi,j
|R|
TC(xi,j) =minj∈RV
|∪i∈Mxi,jli,j||T |
∑
i∈M
∑
j∈R
xi,jbi,j ≤ Bth (6-9)
(DTi,j +DC
i,j)xi,j ≤ Dth i ∈M, j ∈ R (6-10)
∑
i∈M
xi,j ≤ 1
xi,j ∈ 0, 1
The constraint (6-9) is the delay requirement, which means the video files need to be
processed before the deadline to guarantee the quality of safety, and (6-10) is the budget
limit. It is evident that the proposed STC maximization problem are hard to solve. In order to
identify an approximate solution to the proposed problems, the next section adopts a heuristic
algorithm with low complexity.
6.4 Algorithm
Designing algorithms to solve STC problem is a difficult task that requires balance
between trade-offs and consideration of applications? characteristics. Since we utilize
vehicles as mobile monitoring nodes, we should develop the algorithm in respect of scale,
cost and real-time requirement. Due to the high mobility of mobile monitoring nodes, the
locations of vehicles may be constantly changing. Thus, the time window left for making
decisions is limited. Finding the optimal solutions may be time consuming, which is not
practical. Therefore, we consider a heuristic algorithm. We select genetic algorithm to
solve the recruitment part since the chromosomes can readily represent the solutions to
79

mobile monitoring selection. We apply greedy algorithm to deal with the computing resource
optimization part, which has a low complexity.
VISS Algorithm
The following procedure are performed to generate and hold a population to solve our
proposed STC problem.
Step 0 (Initialization): We randomly generate a number of chromosomes as the solutions
in the beginning.
Step 1 (Fitness assignment): At each generation, we assign a fitness value to each
solution by taking the following steps: We first generate random numbers usc and utc in [0,1].
Then, we calculate the random weight of two objectives as wsc = uscusc+utc
and wtc = utcusc+utc
respectively. Then, we calculate the fitness value of each chromosome with the weights defined
above.
Step 2 (Selection): We sort all the chromosomes according to the fitness values.By
defining the sp% as the survival probability for each generation, we allow top sp% of the
population to survive. The chromosomes service in top position of sorted population are kept
as the candidates for the best solution.
Step 3 (Crossover ): A crossover operation is applied to to generate an offspring with the
crossover probability Pc for each chromosome.
Step 4 (Mutation): We also apply a mutation operation with a mutation probability Pm.
Step 5 (Repair): We remove the infeasible solutions since they may be generated by
crossover and mutation once the constraints are violated. In VISS algorithm, we remove the
mobile monitoring nodes with the highest cost until the constraint (6-9) is reached and then
we also remove the mobile monitoring nodes without satisfying constraint (6-10).
Step 6 (Termination test): The algorithm terminates once one of the following conditions
is fulfilled: 1) Maximum number of iterations is reached. 2) The gap between solution of
previous round and current round is small enough.
The complete algorithm is shown as Algorithm 6.1.
80
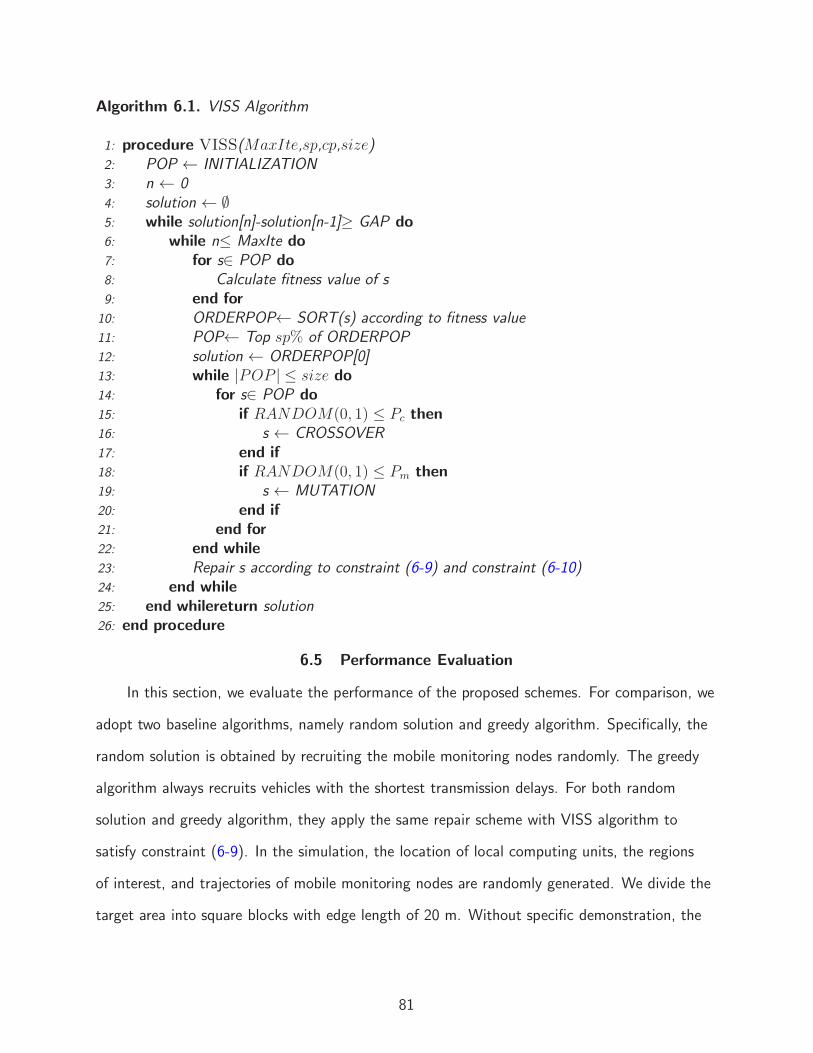
Algorithm 6.1. VISS Algorithm
1: procedure VISS(MaxIte,sp,cp,size)2: POP ← INITIALIZATION3: n ← 04: solution ← ∅5: while solution[n]-solution[n-1]≥ GAP do6: while n≤ MaxIte do7: for s∈ POP do8: Calculate fitness value of s9: end for10: ORDERPOP← SORT(s) according to fitness value11: POP← Top sp% of ORDERPOP12: solution ← ORDERPOP[0]13: while |POP | ≤ size do14: for s∈ POP do15: if RANDOM(0, 1) ≤ Pc then16: s ← CROSSOVER17: end if18: if RANDOM(0, 1) ≤ Pm then19: s ← MUTATION20: end if21: end for22: end while23: Repair s according to constraint (6-9) and constraint (6-10)24: end while25: end whilereturn solution26: end procedure
6.5 Performance Evaluation
In this section, we evaluate the performance of the proposed schemes. For comparison, we
adopt two baseline algorithms, namely random solution and greedy algorithm. Specifically, the
random solution is obtained by recruiting the mobile monitoring nodes randomly. The greedy
algorithm always recruits vehicles with the shortest transmission delays. For both random
solution and greedy algorithm, they apply the same repair scheme with VISS algorithm to
satisfy constraint (6-9). In the simulation, the location of local computing units, the regions
of interest, and trajectories of mobile monitoring nodes are randomly generated. We divide the
target area into square blocks with edge length of 20 m. Without specific demonstration, the
81

recruitment cost is randomly selected. We also assume the maximum communication distance
is 100 m.
Performance comparison with respect to the network size
Fig. 6-3 depicts the evaluation results. We can observe from both figures that our
algorithm outperforms random solution and greedy algorithm. Furthermore, we find that,
with the increasing of network size, the TC and SC is small. That is because the increasing
ratio of interested regions is slower than the increasing ratio of participants. Lower candidates
density essentially reduces the cover opportunity for all regions of interests, thus more and
more regions are losing opportunities to be monitored. Furthermore, we can find that, when
the network size is small, the performance of three schemes are very similar. This is because,
with high density of participants and low number of interested regions, all three schemes have
a high probability to cover the interested regions in spatial dimension with the limited budget.
The impact of number of interested regions
Fig. 6-4 compares TC and SC with respect to the number of interested regions. As
expected, the performance of VISS algorithm is the best among three schemes. We can
find that, in SC, the performance of all three schemes reduces slowly at first. However, the
performance of all three schemes reduces fast in TC. The reason is the increasing ratio of
interested time slots is much faster than the increasing ratio of interested geography regions.
That is to say, for the same number of interested regions, the density of participants is enough
to cover most spatial regions, but the density of participants is not enough to cover most
temporal time slots.
The impact of number of participants
We observe in Fig. 6-5 VISS algorithm performs significantly better than random solution
and greedy algorithm. As a result, the TC and SC first falsely rises under three algorithms.
However, once achieving some points, the SC nearly remains stable as network number of
participants grows. This is because there are sufficient number of the candidates of mobile
82

monitoring nodes to monitor most regions with the limited budget. Basically, when the
performance of all the schemes remains stable, the limited budget becomes the major factor.
1000 2000 3000 4000 5000
Network Size (square meters )
0.7
0.75
0.8
0.85
0.9
0.95
1
1.05
1.1
Spa
tial C
over
age
VISSGRERAN
A Spatial Coverage
1000 2000 3000 4000 5000
Network Size (square meters )
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Tem
pora
l Cov
erag
e
VISSGRERAN
B Temporal Coverage
Figure 6-3. Evaluation results for network size.
83
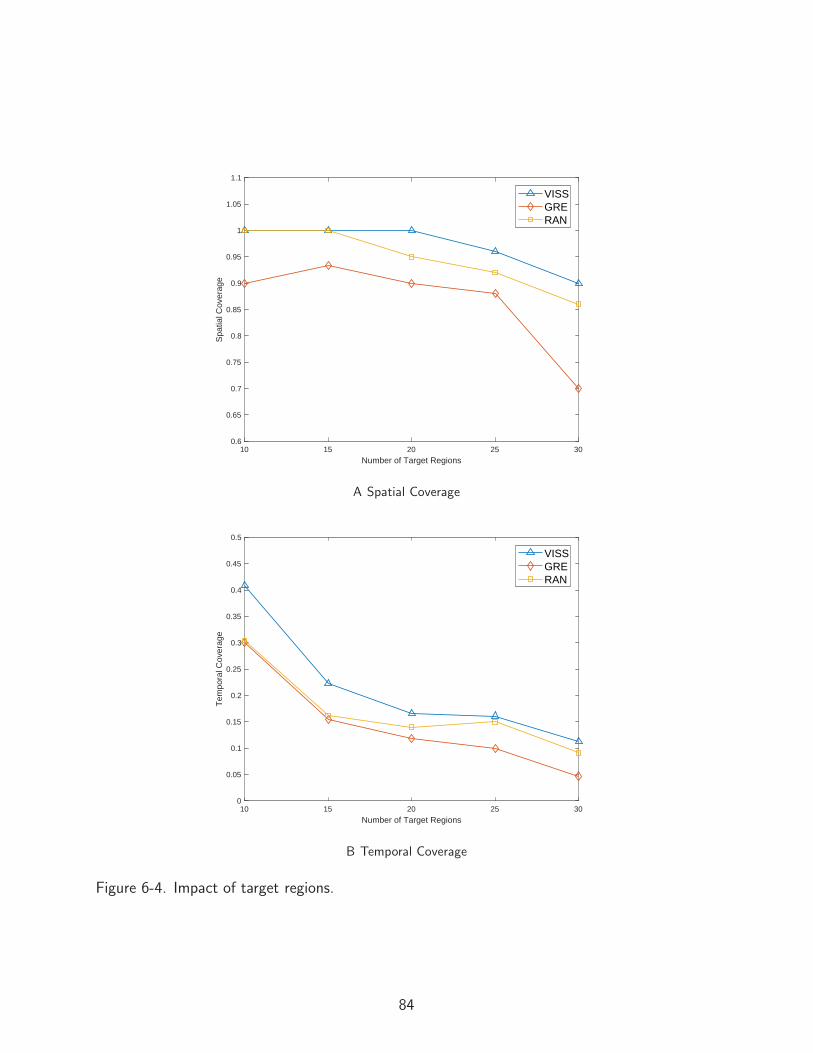
10 15 20 25 30
Number of Target Regions
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
1.05
1.1
Spa
tial C
over
age
VISSGRERAN
A Spatial Coverage
10 15 20 25 30
Number of Target Regions
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Tem
pora
l Cov
erag
e
VISSGRERAN
B Temporal Coverage
Figure 6-4. Impact of target regions.
84
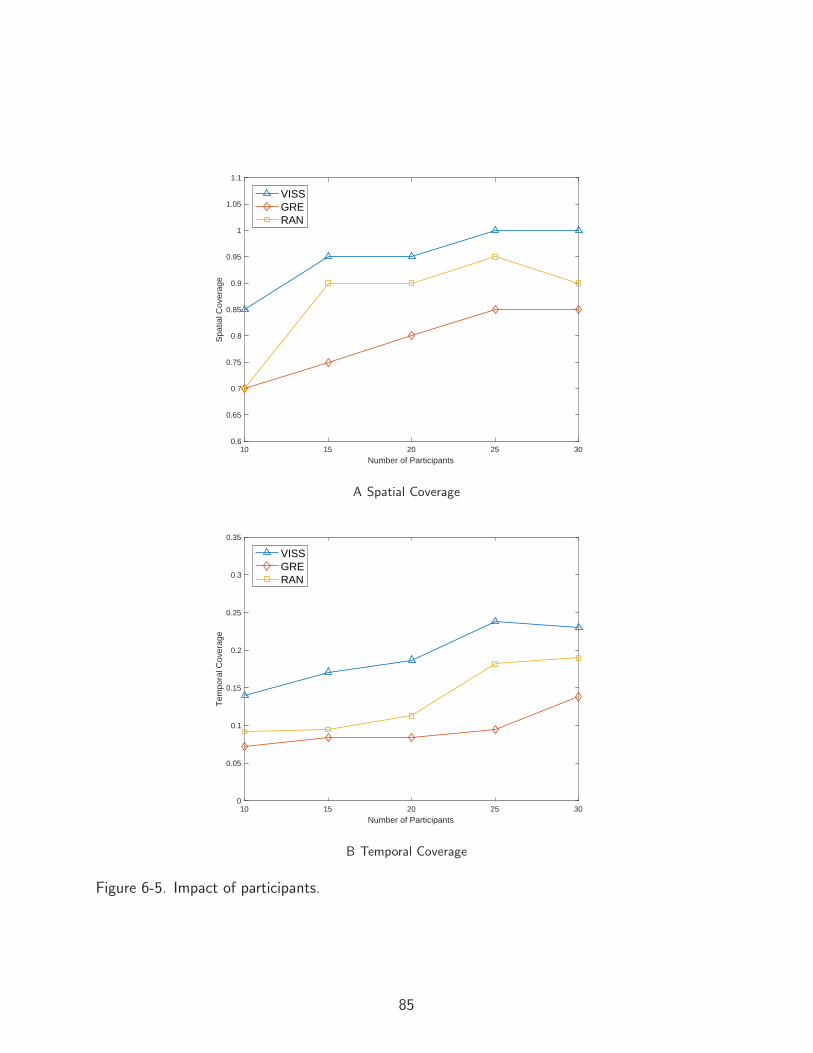
10 15 20 25 30
Number of Participants
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
1.05
1.1
Spa
tial C
over
age
VISSGRERAN
A Spatial Coverage
10 15 20 25 30
Number of Participants
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Tem
pora
l Cov
erag
e
VISSGRERAN
B Temporal Coverage
Figure 6-5. Impact of participants.
85

CHAPTER 7SUMMARY AND CONCLUSIONS
In this dissertation, we focus on designing and implementing architectures for safety
centric IoT platform to support public safety related services in the smart cities. We start
from the overall design of the IoT platform. We first utilize the proposed architecture to solve
the children safety problem in public areas. We have proposed a novel UHF RFID system for
tracking children in the public area. In our RFID networks, readers are associated with mobile
devices for target localization. With the help of remote central center, the reader is matched
with an mobile device to transmit raw data for processing. Then, the associated mobile devices
deliver the processed data to the users. Then, safe walking navigation problem is solved under
the safety centric IoT platform. We have proposed a safety application, SPATH, to handle
safety issues in smart cities. We have utilized existing cellular infrastructures to transmit
surveillance videos from street cameras to the users to identify the safety status. To handle the
large volume of videos, we have leveraged the vehicles with underutilized computing resources
as the local computing units to summarize videos. In addition, vehicle based intelligent
surveillance system (VISS) is proposed to improve public safety in smart cities. Vehicle based
monitoring system utilizes vehicles installed dash cameras to monitor target regions. VISS
recruits vehicles as the mobile monitoring nodes to expand geographical monitoring regions.
Cooperating with slowly moving or parked vehicles with sufficient computing capability, VISS
can extract potential victims from the monitoring video files and recruit mobile monitoring
nodes to monitor potential victims as long as possible.
86
REFERENCES
[1] M. Press. Leading the Smart City Revolution with Safety First. [May 8, 2018]. [Online].Available: https://www.ul.com/newsroom/featured/leading-the-smart-city-revolution-with-safety-first/
[2] N. James, “Recent violent crime trends in the united states,” 2018.
[3] Office for Victims of Crime . 2018 National Crime Victims? Rights Week Resource Guide:Crime and Victimization Fact Sheets. [April 8, 2018]. [Online]. Available: https://ovc.ncjrs.gov/ncvrw2018/info flyers/fact sheets/2018NCVRW UrbanRural 508 QC.pdf
[4] D. J. Paulsen, “To map or not to map: Assessing the impact of crime maps on policeofficer perceptions of crime,” International Journal of Police Science & Management,vol. 6, no. 4, pp. 234–246, 2004.
[5] A. Bogomolov, B. Lepri, J. Staiano, N. Oliver, F. Pianesi, and A. Pentland, “Once upona crime: towards crime prediction from demographics and mobile data,” in Proceedings ofthe 16th international conference on multimodal interaction, 2014, pp. 427–434.
[6] E. Galbrun, K. Pelechrinis, and E. Terzi, “Urban navigation beyond shortest route: Thecase of safe paths,” Information Systems, vol. 57, pp. 160–171, 2016.
[7] N. Goel, R. Sharma, N. Nikhil, S. Mahanoor, and M. Saini, “A crowd-sourced adaptive safenavigation for smart cities,” in Multimedia (ISM), 2017 IEEE International Symposium on,2017, pp. 382–387.
[8] F. Mata, M. Torres-Ruiz, G. Guzman, R. Quintero, R. Zagal-Flores, M. Moreno-Ibarra, andE. Loza, “A mobile information system based on crowd-sensed and official crime data forfinding safe routes: A case study of mexico city,” Mobile Information Systems, vol. 2016,2016.
[9] M. Garvey, N. Das, J. Su, M. Natraj, and B. Verma, “Passage: A travel safety assistantwith safe path recommendations for pedestrians,” in Companion Publication of the 21stInternational Conference on Intelligent User Interfaces, 2016, pp. 84–87.
[10] K. Holbø, S. Bøthun, and Y. Dahl, “Safe walking technology for people with dementia: whatdo they want?” in Proceedings of the 15th International ACM SIGACCESS Conference onComputers and Accessibility, 2013, p. 21.
[11] D. C. Schwebel, D. Stavrinos, K. W. Byington, T. Davis, E. E. O Neal, and D. De Jong,“Distraction and pedestrian safety: how talking on the phone, texting, and listening tomusic impact crossing the street,” Accident Analysis & Prevention, vol. 45, pp. 266–271,2012.
[12] T. Wang, G. Cardone, A. Corradi, L. Torresani, and A. T. Campbell, “Walksafe: apedestrian safety app for mobile phone users who walk and talk while crossing roads,” inProceedings of the twelfth workshop on mobile computing systems & applications, 2012,p. 5.
87

[13] S. Jain, C. Borgiattino, Y. Ren, M. Gruteser, Y. Chen, and C. F. Chiasserini, “Lookup:Enabling pedestrian safety services via shoe sensing,” in Proceedings of the 13thAnnual International Conference on Mobile Systems, Applications, and Services, 2015, pp.257–271.
[14] J. Mwakalonge, S. Siuhi, and J. White, “Distracted walking: Examining the extent topedestrian safety problems,” Journal of traffic and transportation engineering (Englishedition), vol. 2, no. 5, pp. 327–337, 2015.
[15] H. Qin, Z. Li, Y. Wang, X. Lu, W. Zhang, and G. Wang, “An integrated network ofroadside sensors and vehicles for driving safety: Concept, design and experiments,” inPervasive Computing and Communications (PerCom), 2010 IEEE International Conferenceon, 2010, pp. 79–87.
[16] H. S. Park, M. W. Park, K. H. Won, K.-H. Kim, and S. K. Jung, “In-vehicle ar-hud systemto provide driving-safety information,” ETRI journal, vol. 35, no. 6, pp. 1038–1047, 2013.
[17] B. Aytekin and E. Altug, “Increasing driving safety with a multiple vehicle detectionand tracking system using ongoing vehicle shadow information,” in Systems Man andCybernetics (SMC), 2010 IEEE International Conference on, 2010, pp. 3650–3656.
[18] J. Wang, S. Zhu, and Y. Gong, “Driving safety monitoring using semisupervised learning ontime series data,” IEEE Transactions on Intelligent Transportation Systems, vol. 11, no. 3,pp. 728–737, 2010.
[19] Rebecca Edwards . The Best Kids GPS Trackers and Wearables. [June 7, 2019]. [Online].Available: https://www.safewise.com/resources/wearable-gps-tracking-devices-for-kids-guide/
[20] Deyan G. 60+ Smartphone Statistics in 2019. [March 28, 2019]. [Online]. Available:https://techjury.net/stats-about/smartphone-usage/
[21] Bankmycell.com. Six smartphone addiction facts and phone usage statistics. [March 28,2019]. [Online]. Available: https://www.bankmycell.com/blog/smartphone-addiction/#chapter2
[22] A. Gupta and V. Harit, “Child safety tracking management system by using gps,geo-fencing android application: An analysis,” in 2016 Second International Conference onComputational Intelligence Communication Technology (CICT), Feb 2016, pp. 683–686.
[23] R. Velayutham, M. Sabari, and M. S. Rajeswari, “An innovative approach for women andchildren’s security based location tracking system,” in 2016 International Conference onCircuit, Power and Computing Technologies (ICCPCT), March 2016, pp. 1–5.
[24] A. R. Al-Ali, F. A. Aloul, N. R. Aji, A. A. Al-Zarouni, and N. H. Fakhro, “Mobile rfidtracking system,” pp. 1–4, April 2008.
88

[25] Y. Mori, H. Kojima, E. Kohno, S. Inoue, T. Ohta, Y. Kakuda, and A. Ito, “Aself-configurable new generation children tracking system based on mobile ad hoc networksconsisting of android mobile terminals,” pp. 339–342, March 2011.
[26] J. Saranya and J. Selvakumar, “Implementation of children tracking system on androidmobile terminals,” pp. 961–965, April 2013.
[27] K. Liu and X. Li, “Finding nemo: Finding your lost child in crowds via mobile crowd sensing,”2014 IEEE 11th International Conference on Mobile Ad Hoc and Sensor Systems, pp. 1–9,October 2014.
[28] K. Morii, K. Taketa, Y. Mori, H. Kojima, E. Kohno, S. Inoue, T. Ohta, and Y. Kakuda,“A new generation children tracking system using bluetooth manet composed of androidmobile terminals,” in 2012 9th International Conference on Ubiquitous Intelligence andComputing and 9th International Conference on Autonomic and Trusted Computing, Sept2012, pp. 405–407.
[29] A. Yudhahutama and A. I. Wuryandari, “Network and application design for childrentracking and identification system with html5 and asynchronous communication (futurekindergarten project),” pp. 1–6, Nov 2013.
[30] A. Gupta and V. Harit, “Child safety tracking management system by using gps, geo-fencingandroid application: An analysis,” pp. 683–686, Feb 2016.
[31] X. Lin, R. Lu, D. Kwan, and X. S. Shen, “React: An rfid-based privacy-preserving childrentracking scheme for large amusement parks,” Computer Networks, vol. 54, no. 15, pp.2744 – 2755, 2010.
[32] C. Chen, “Design of a child localization system on rfid and wireless sensor networks,”Journal of Sensors, vol. 2010, 2010.
[33] H. Zhang, Q. Zhang, and X. Du, “Toward vehicle-assisted cloud computing forsmartphones,” IEEE Transactions on Vehicular Technology, vol. 64, no. 12, pp. 5610–5618,2015.
[34] H. Ding, C. Zhang, Y. Cai, and Y. Fang, “Smart cities on wheels: a newly emergingvehicular cognitive capability harvesting network for data transportation,” IEEE WirelessCommunications, vol. 25, no. 2, pp. 160–169, 2018.
[35] H. Ding, C. Zhang, B. Lorenzo, and Y. Fang, “Access point recruitment in a vehicularcognitive capability harvesting network: How much data can be uploaded?” IEEETransactions on Vehicular Technology, vol. 67, no. 7, pp. 6438–6445, 2018.
[36] A. Juels et al., “Rfid security and privacy: A research survey,” IEEE journal on selectedareas in communications, vol. 24, no. 2, pp. 381–394, 2006.
[37] M. Langheinrich, “A survey of rfid privacy approaches,” Personal and UbiquitousComputing, vol. 13, no. 6, pp. 413–421, 2009.
89

[38] M. A. Khan, M. Sharma, and B. R. Prabhu, “A survey of rfid tags,” International Journalof Recent Trends in Engineering, vol. 1, no. 4, p. 68, 2009.
[39] M. S. Trotter and G. D. Durgin, “Survey of range improvement of commercial rfid tagswith power optimized waveforms,” in 2010 IEEE International Conference on RFID (IEEERFID 2010), 2010, pp. 195–202.
[40] V. Chawla and D. S. Ha, “An overview of passive rfid,” IEEE Communications Magazine,vol. 45, no. 9, pp. 11–17, 2007.
[41] S. Li, L. Da Xu, and S. Zhao, “The internet of things: a survey,” Information SystemsFrontiers, vol. 17, no. 2, pp. 243–259, 2015.
[42] D. Potapov, M. Douze, Z. Harchaoui, and C. Schmid, “Category-specific videosummarization,” in European conference on computer vision, 2014, pp. 540–555.
[43] Z. Lu and K. Grauman, “Story-driven summarization for egocentric video,” in Proceedings ofthe IEEE Conference on Computer Vision and Pattern Recognition, 2013, pp. 2714–2721.
[44] S. P. Rajendra and N. Keshaveni, “A survey of automatic video summarization techniques,”International Journal of Electronics, Electrical and Computational System, vol. 2, no. 1,2014.
[45] A. G. Money and H. Agius, “Video summarisation: A conceptual framework and survey ofthe state of the art,” Journal of Visual Communication and Image Representation, vol. 19,no. 2, pp. 121–143, 2008.
[46] D. Gale and L. S. Shapley, “College admissions and the stability of marriage,” TheAmerican Mathematical Monthly, vol. 69, no. 1, pp. 9–15, 1962.
[47] K. Li, Q. Zhang, S. Kwong, M. Li, and R. Wang, “Stable matching-based selectionin evolutionary multiobjective optimization,” IEEE Transactions on EvolutionaryComputation, vol. 18, no. 6, pp. 909–923, 2013.
[48] A. E. Roth and M. Sotomayor, “Two-sided matching,” Handbook of game theory witheconomic applications, vol. 1, pp. 485–541, 1992.
[49] T. Sonmez, “Strategy-proofness in many-to-one matching problems,” Economic Design,vol. 1, no. 1, pp. 365–380, 1994.
[50] D. Whitley, “A genetic algorithm tutorial,” Statistics and computing, vol. 4, no. 2, pp.65–85, 1994.
[51] M. Srinivas and L. M. Patnaik, “Genetic algorithms: A survey,” computer, vol. 27, no. 6,pp. 17–26, 1994.
[52] J. Genlin, “Survey on genetic algorithm [j],” Computer Applications and Software, vol. 2,pp. 69–73, 2004.
90

[53] A. N. Staff. Missing Children in America: Unsolved Cases. [May 8, 2013]. [Online].Available: https://abcnews.go.com/US/missing-children-america-unsolved-cases/story?id=19126967
[54] Top 11 GPS tracker for modern family of 2016-kids smart watches. [June 03, 2016].[Online]. Available: https://www.thepawtracker.com/blogs/the-pet-tracker-blog-by-the-paw-tracker/128819843-11-kids-gps-tracker-for-the-modern-families-of-2016
[55] C. Gartenberg. Chipolo claims its new Bluetooth trackers are the smallest and thinnestin the world. [January 5, 2017]. [Online]. Available: https://www.theverge.com/circuitbreaker/2017/1/5/14180294/chipolo-bluetooth-trackers-sticker-clip-ces-2017
[56] L. Chan. Chipolo-Bluetooth Item Finder for iPhone and Android. [February 5, 2014].[Online]. Available: https://lesterchan.net/blog/2014/02/05/chipolo-bluetooth-item-finder-for-iphone-and-android/
[57] J. Chen, M. Chen, C. Chen, and Y. Chang, “Architecture design and performanceevaluation of rfid object tracking systems,” Computer Communications, vol. 30, no. 9, p.20702086, 2007.
[58] M. Bonuccelli, F. Lonetti, and F. Martelli, “Instant collision resolution for tag identificationin rfid networks,” Ad Hoc Networks, vol. 5, no. 8, p. 12201232, 2007.
[59] X. Hu, K. K. Wong, and K. Yang, “Wireless powered cooperation-assisted mobile edgecomputing,” IEEE Transactions on Wireless Communications, vol. PP, no. 99, pp. 1–1,2018.
[60] H. Gao, M. Wang, and T. Lv, “Energy efficiency and spectrum efficiency tradeoff in thed2d-enabled hetnet,” IEEE Transactions on Vehicular Technology, vol. 66, no. 11, pp.10 583–10 587, 2017.
[61] J. Liu, H. Ding, Y. Cai, H. Yue, Y. Fang, and S. Chen, “An energy-efficient strategy forsecondary users in cooperative cognitive radio networks for green communications,” IEEEJournal on Selected Areas in Communications, vol. 34, no. 12, pp. 3195–3207, 2016.
[62] R. W. Freund and F. Jarre, “Solving the sum-of-ratios problem by an interior-pointmethod,” Journal of Global Optimization, vol. 19, no. 1, pp. 83–102, 2001.
[63] W. Dinkelbach, “On nonlinear fractional programming,” Management Science, vol. 13,no. 7, pp. 492–498, 1967.
[64] J. Gao, L. Zhao, and X. Shen, “Network utility maximization based on incentive mechanismfor truthful reporting of local information,” IEEE Transactions on Vehicular Technology,pp. 1–1, 2018.
[65] P. He, L. Zhao, S. Zhou, and Z. Niu, “Water-filling: A geometric approach and itsapplication to solve generalized radio resource allocation problems,” IEEE Transactions onWireless Communications, vol. 12, no. 7, pp. 3637–3647, 2013.
91

[66] Y. Luo, P. Hong, R. Su, and K. Xue, “Resource allocation for energy harvesting-poweredd2d communication underlaying cellular networks,” IEEE Transactions on VehicularTechnology, vol. 66, no. 11, pp. 10 486–10 498, 2017.
[67] F. N. P. Office. 2017 crimes in the United States. [September 24, 2018]. [Online].Available: https://ucr.fbi.gov/crime-in-the-u.s/2017/crime-in-the-u.s.-2017/topic-pages/violent-crime
[68] Smartertravel.com. Best Apps to Prevent Travel Disasters. [December 06, 2017]. [Online].Available: https://www.huffingtonpost.com/smartertravel/best-apps-to-prevent-trav b5606425.html
[69] A. Bouman. Five personal safety apps that watch your back. [ October 28, 2013]. [Online].Available: https://www.pcworld.com/article/2057930/5-personal-safety-apps-that-watch-your-back.html
[70] Matt Hamblen. Moscow’s smart tech includes 160,000 outdoor cameras. [February 28,2017 ]. [Online]. Available: https://www.computerworld.com/article/3175063/moscows-smart-tech-includes-160000-cameras-to-detect-traffic-violators.html
[71] Scott Goldfine. 32K Surveillance Cameras Aim to Keep Chicago Safe. [October 31, 2018].[Online]. Available: https://www.campussafetymagazine.com/technology/surveillance-cameras-keeping-chicago-safe/
[72] T. G. Rodrigues, K. Suto, H. Nishiyama, N. Kato, and K. Temma, “Cloudlets activationscheme for scalable mobile edge computing with transmission power control and virtualmachine migration,” IEEE Transactions on Computers, vol. 67, no. 9, pp. 1287–1300,2018.
[73] W. Shi, J. Cao, Q. Zhang, Y. Li, and L. Xu, “Edge computing: Vision and challenges,”IEEE Internet of Things Journal, vol. 3, no. 5, pp. 637–646, 2016.
[74] T. G. Rodrigues, K. Suto, H. Nishiyama, and N. Kato, “Hybrid method for minimizingservice delay in edge cloud computing through vm migration and transmission powercontrol,” IEEE Transactions on Computers, vol. 66, no. 5, pp. 810–819, 2017.
[75] X. Hou, Y. Li, M. Chen, D. Wu, D. Jin, and S. Chen, “Vehicular fog computing: Aviewpoint of vehicles as the infrastructures,” IEEE Transactions on Vehicular Technology,vol. 65, no. 6, pp. 3860–3873, 2016.
[76] J. A. Guerrero-Ibanez, S. Zeadally, and J. Contreras-Castillo, “Integration challenges ofintelligent transportation systems with connected vehicle, cloud computing, and internet ofthings technologies,” IEEE Wireless Communications, vol. 22, no. 6, pp. 122–128, 2015.
[77] S. Abdelhamid, H. Hassanein, and G. Takahara, “Vehicle as a resource (vaar),” IEEENetwork, vol. 29, no. 1, pp. 12–17, 2015.
92

[78] L. Zhang, Z. Zhao, Q. Wu, H. Zhao, H. Xu, and X. Wu, “Energy-aware dynamic resourceallocation in uav assisted mobile edge computing over social internet of vehicles,” IEEEAccess, vol. 6, pp. 56 700–56 715, 2018.
[79] M. Whaiduzzaman, M. Sookhak, A. Gani, and R. Buyya, “A survey on vehicular cloudcomputing,” Journal of Network and Computer applications, vol. 40, pp. 325–344, 2014.
[80] Y. J. Lee, J. Ghosh, and K. Grauman, “Discovering important people and objects foregocentric video summarization,” pp. 1346–1353, 2012.
[81] Y. Pang, H. Ding, J. Liu, Y. Fang, and S. Chen, “A uhf rfid-based system for childrentracking,” IEEE Internet of Things Journal, vol. 5, no. 6, pp. 5055–5064, 2018.
[82] C. Long, Y. Cao, T. Jiang, and Q. Zhang, “Edge computing framework for cooperativevideo processing in multimedia iot systems,” IEEE Transactions on Multimedia, vol. 20,no. 5, pp. 1126–1139, 2018.
[83] D. W. Scott, Multivariate density estimation: theory, practice, and visualization. JohnWiley & Sons, 2015.
[84] D. P. Bertsekas and A. Scientific, Convex optimization algorithms. Athena ScientificBelmont, 2015.
[85] S. Boyd and L. Vandenberghe, Convex optimization. Cambridge university press, 2004.
[86] L. Lovasz and M. D. Plummer, Matching theory. American Mathematical Soc., 2009, vol.367.
[87] X. Lyu, H. Tian, W. Ni, Y. Zhang, P. Zhang, and R. P. Liu, “Energy-efficient admission ofdelay-sensitive tasks for mobile edge computing,” IEEE Transactions on Communications,vol. 66, no. 6, pp. 2603–2616, 2018.
[88] F. Wang, J. Xu, X. Wang, and S. Cui, “Joint offloading and computing optimizationin wireless powered mobile-edge computing systems,” IEEE Transactions on WirelessCommunications, vol. 17, no. 3, pp. 1784–1797, 2018.
[89] VinTech Systems. Top 5 Cities with the Largest Surveillance Camera Networks. [May 4,2011]. [Online]. Available: https://vintechnology.com/2011/05/04/top-5-cities-with-the-largest-surveillance-camera-networks/
[90] K. Chen, M. Lu, X. Fan, M. Wei, and J. Wu, “Road condition monitoring using on-boardthree-axis accelerometer and gps sensor,” in 2011 6th International ICST Conference onCommunications and Networking in China (CHINACOM), 2011, pp. 1032–1037.
[91] Z. Li, Y. Zhu, H. Zhu, and M. Li, “Compressive sensing approach to urban trafficsensing,” in 2011 31st International Conference on Distributed Computing Systems, 2011,pp. 889–898.
93

[92] S. Mathur, T. Jin, N. Kasturirangan, J. Chandrasekaran, W. Xue, M. Gruteser, andW. Trappe, “Parknet: drive-by sensing of road-side parking statistics,” in Proceedings ofthe 8th international conference on Mobile systems, applications, and services, 2010, pp.123–136.
[93] Z. He, J. Cao, and X. Liu, “High quality participant recruitment in vehicle-basedcrowdsourcing using predictable mobility,” in 2015 IEEE Conference on ComputerCommunications (INFOCOM), 2015, pp. 2542–2550.
94

BIOGRAPHICAL SKETCH
Yawei Pang received his B.Eng. degree in electric information engineering from Hefei
University of Technology, Hefei, China, in 2010. He received his M.S. degree in computer
science from Texas Southern University in 2015. He received his Ph.D. degree in electrical
and computer engineering from University of Florida in 2019. His research focuses on wireless
networking, edge computing, and Internet of Things. He has published papers in prestigious
journals including IEEE Internet of Things Journal and IEEE Transactions on Vehicular
Technology. He is a student member of IEEE.
95