Route Choice on Transit Networks with Online Information at Stops
15
Route choice on transit networks with on-line information at stops * Guido Gentile Dipartimento di Idraulica Trasporti e Strade Universit` a degli Studi di Roma ‘La Sapienza’, [email protected] Sang Nguyen D´ epartement d’Informatique et de Recherche Op´ erationnelle Universit´ e de Montr´ eal, [email protected] Stefano Pallottino † Dipartimento di Informatica Universit`a di Pisa September 28, 2004 Abstract Passengers on a transit network with common lines are often faced with the problem of choosing between either to board the arriving bus or to wait for a faster one. Many assignment models are based on the classical assumption that at a given stop passengers board the first arriving carrier of a certain subset of the available lines, often referred to as the attractive set. In this case, it has been shown that if the headway distributions are exponential then an optimal subset of lines minimizing the passenger travel time can be determined. However, when on-line information on future arrivals of buses are posted at the stop it is unlikely that the above classical assumption holds. Passengers may choose in this case to board a line that offers the best combination of displayed waiting time and expected travel time to destination once boarded. In this paper, we propose a general framework for determining the probability of boarding each line available at a stop when on-line information on bus waiting times is provided to passengers. We will also show that the classical model without on-line information may be interpreted as a particular instance of the proposed framework. The impact of the availability of information regarding bus arrivals and that of the regularity of transit lines on the network loads as well as on the passenger travel times will be illustrated with small numerical examples. Introduction Consider a transit network where every line has a fixed itinerary and is described by a sequence of stops. We are interested in urban networks with common lines, in the sense that multiple line routes share some stops and segments of itineraries. We will focus on the case where the transit lines service irregularity is high enough so that passengers may not be able to time their arrivals at stops in order to minimize their waiting times. It is reasonable in this case to assume that line headways are statistically independent and that passengers arrive randomly at stops (see, for example, Seddon & Day 1974, Jolliffe & Hutchinson 1975, Bowman & Turnquist 1981). * Research grants by MIUR and INDAM-GNAMPA of Italy, and NSERC of Canada. † Our colleague Stefano Pallottino sadly passed away on April the 11th, 2004. 1
Transcript of Route Choice on Transit Networks with Online Information at Stops

Route choice on transit networkswith on-line information at stops ∗
Guido GentileDipartimento di Idraulica Trasporti e Strade
Universita degli Studi di Roma ‘La Sapienza’, [email protected]
Sang NguyenDepartement d’Informatique et de Recherche Operationnelle
Universite de Montreal, [email protected]
Stefano Pallottino†
Dipartimento di InformaticaUniversita di Pisa
September 28, 2004
Abstract
Passengers on a transit network with common lines are often faced with the problemof choosing between either to board the arriving bus or to wait for a faster one. Manyassignment models are based on the classical assumption that at a given stop passengersboard the first arriving carrier of a certain subset of the available lines, often referred toas the attractive set. In this case, it has been shown that if the headway distributions areexponential then an optimal subset of lines minimizing the passenger travel time can bedetermined. However, when on-line information on future arrivals of buses are posted at thestop it is unlikely that the above classical assumption holds. Passengers may choose in thiscase to board a line that offers the best combination of displayed waiting time and expectedtravel time to destination once boarded. In this paper, we propose a general framework fordetermining the probability of boarding each line available at a stop when on-line informationon bus waiting times is provided to passengers. We will also show that the classical modelwithout on-line information may be interpreted as a particular instance of the proposedframework. The impact of the availability of information regarding bus arrivals and that ofthe regularity of transit lines on the network loads as well as on the passenger travel timeswill be illustrated with small numerical examples.
Introduction
Consider a transit network where every line has a fixed itinerary and is described by a sequenceof stops. We are interested in urban networks with common lines, in the sense that multipleline routes share some stops and segments of itineraries. We will focus on the case where thetransit lines service irregularity is high enough so that passengers may not be able to time theirarrivals at stops in order to minimize their waiting times. It is reasonable in this case to assumethat line headways are statistically independent and that passengers arrive randomly at stops(see, for example, Seddon & Day 1974, Jolliffe & Hutchinson 1975, Bowman & Turnquist 1981).
∗Research grants by MIUR and INDAM-GNAMPA of Italy, and NSERC of Canada.†Our colleague Stefano Pallottino sadly passed away on April the 11th, 2004.
1

Earlier works on transit systems are devoted to the analysis of service regularity and tothe waiting and boarding process in situations of congestion. They are mainly aimed at de-veloping realistic bus headway distributions and passenger waiting time distributions, such asthe Power and the Erlang distributions (e.g., Chriqui & Robillard 1975, Bowman & Turnquist1981, Hasseltrom 1981, Larson & Odoni 1981, Gendreau 1984, Marguier & Ceder 1984).
Recent researches focus more on the passenger’s route choices and on the resulting assignmentmodels. In terms of route choice, it is often assumed that each passenger has a traveling strategythat allows him to reach his destination at a minimum perceived cost. On the modeling networka strategy may be formally described by a hyperpath connecting the origin to the destination (seefor instance Nguyen & Pallottino 1989) with the property that at each stop-node only transitlines that have a positive probability to be boarded by the passenger are explicitly considered .
Existing assignment models using hyperpaths (e.g., Spiess 1984, Nguyen & Pallottino 1988,Spiess & Florian 1989, Wu, Florian & Marcotte 1994, Bouzaıene-Ayari, Gendreau & Nguyen1995, Nguyen, Pallottino & Gendreau 1998) are all based on the following hypotheses:
• transit line headways are statistically independent, and have exponential distributions;
• passengers arrive randomly at stops, and board the first arriving carrier of their attractiveset which is choosen among the available lines.
These assumptions lead to a greedy algorithm for determining an optimal subset of the availablelines that minimizes the passenger travel time (see Section 2). Simple methods for computingthe line boarding probabilities for passengers sharing a given destination have been proposed aswell as complete assignment procedures.
The new ingredient here is the introduction of on-line information regarding the arrivaltimes of the line carriers at transit stops. Specifically, at some stops it will be assumed that thewaiting time for the next carrier of each line is directly displayed on a variable message sign,providing a reliable information that passengers may use locally to decide which line to board.More sophisticated technologies – internet, mobile phones, wireless networks, etc. – may allowpassengers to retrieve the same information remotely from the stop.
In general, the availability of prior information allows passengers to consider a variety ofoptions and alternatives not addressed in this paper. For instance, with prior information apassenger at home may decide to change his departure time, the initial stop of his journey andeven the transport mode. While a passenger riding on a carrier can choose the next alightingstop to make the most convenient transfer, based on information either displayed in the vehicle orretrieved through a mobile phone. The study of a more general behavioral model is a challengingtopic of research beyond the scope of the present work.
1 Common lines with on-line information at stops
1.1 The problem
At the core of any transit assignment model, there is either implicitly or explicitly a stop model.This latter model emulates the passenger’ s decision making at a transit stop. It is generallyassumed that the passenger will choose to board a carrier that will minimize his expected totaltravel time to reach his destination. Given the headway distribution of each line and the expectedtravel time to destination, a stop model usually yields the probability of boarding each line, theassociated expected waiting and travel times to destination.
The line probabilities are in turn used to allocate passengers onto different lines (networkloading phase) while the waiting times and the expected travel times enter into the computationof the average travel cost for each origin-destination pair. When congestion is a relevant issue,
2

that is when the travel time (or cost) is a function of the flow pattern resulting from the networkloading, these computations must be repeated to reach a stable network load. For equilibriumassignment models, the iterative adjustments lead to an equilibrium passenger flow pattern.
In this work we generalize the behavioral model at the stop to the case where, in addition tothe headway distributions and the line travel times, we also have on-line information displayedat the stop about the waiting times of the available lines. We also investigate the impact ofservice regularity on the line loads by considering the family of Erlang headway distributions,which encompasses both the exponential and the deterministic distributions. This new stopmodel provides straightforward mathematical formulas for the computation of line probabilitiesand expected travel time, and thus may be embedded into many existing assignment models tohandle transit networks with on-line information at stops and general headway distributions.
The basic assumptions of the model are the following:
• transit line headways are statistically independent with given continuous distributions;
• passengers arrive randomly at the stop;
• passengers have a good estimate of each line travel time, i.e., the expected travel time fromthe stop to destination once boarded a carrier of the line including subsequent transfers;
• passengers can retrieve the line waiting times from the information displayed at the stop;
• passengers choose to board the line that shows the minimum total time to destination, i.e.,the sum of the line waiting time and of the line travel time.
The aim is to develop a tool that can measure the impact of providing on-line informationabout carrier arrivals upon the average passenger flows on the transit network. To this end theline waiting times displayed at the stop will be considered independent random variables. Inthis perspective, the line shares and (minus) the expected travel time are respectively the choiceprobabilities and the satisfaction that can be obtained from a discrete choice model where therandomness of the alternatives’ utility is intrinsic to the supply instead of being derived as usualfrom the user’s and/or the modeler’s errors.
Note that the attractive set is reduced here to a singleton identified by the line with thebest total time. As a consequence, the line share is now a measure of the line attractiveness incontrast to being the probability that a carrier of the line is the first one to arrive at the stopamong the lines of the attractive set as in the classical models.
For the sake of simplicity, we have assumed that time is the only measure of disutility.However, extending the framework to handle generalized costs is a straightforward task.
1.2 The basic framework
For each line i ∈ Ln, where Ln = {1, 2, . . . , n} is the set of lines serving a given stop, we assumethat the following attributes are exogenously given:
si the line travel time;fi(w) the probability density function of the line waiting time, with fi(w) = 0,∀ w < 0.
Note that for passengers who arrive randomly at a stop, the line waiting time probabilitydensity function is related to the headway distribution through the formula (Larson & Odoni1981):
fi(w) =∫ +∞w gi(h) dh
E[hi]= λi(1−Gi(w)), (1)
3

where hi is the headway of line i, gi(h) its probability density function, Gi(h) its cumulativedistribution function, and 1/E[hi] = λi is the inverse of the mean headway, generally referredto as the frequency. Let Fi(w) denote the cumulative distribution function of the line waitingtime and F i(w) its complement, then we have:
Fi(w) =∫ w
0fi(v) dv,
F i(w) = 1− Fi(w) =∫ +∞
wfi(v) dv.
The probability of boarding line i is equal to the probability that i is the line with the besttotal time. Since the line headways and consequently the line waiting times are assumed to beindependent from each other, the latter may be expressed as:
πi =∫ +∞
0fi(w)
∏j∈Ln\{i}
Prob(wj ≥ w + si − sj) dw,
where∏
j∈Ln\{i} Prob(wj ≥ w + si − sj) is the joint probability that the total time of line iis better than or equal to that of any other line, when the waiting time displayed for the nextcarrier of line i is equal to w. Using:
Prob(wj ≥ w + si − sj) = F j(w + si − sj),
we can rewrite the probability of boarding line i as:
πi =∫ +∞
0γi(w) dw, (2)
where γi(w) denotes:
γi(w) = fi(w)∏
j∈Ln\{i}F j(w + si − sj), (3)
and may be interpreted as the probability density function of the waiting time at the stopconditional to boarding a carrier of line i.
The expected waiting time conditional to boarding a carrier of line i is therefore:
EWi =∫ +∞
0wγi(w) dw.
Summing EWi over all lines i ∈ Ln gives the expected waiting time at the stop:
EW =∑i∈Ln
∫ +∞
0wγi(w) dw =
∫ +∞
0w
∑i∈Ln
γi(w) dw. (4)
Thus, the sum∑
i∈Lnγi(w) is the probability density function of the waiting time at the stop.
By definition the expected travel time once boarded is:
ES =∑i∈Ln
πisi,
and then the expected travel time is:
ET = EW + ES =∑i∈Ln
∫ +∞
0(w + si)γi(w) dw.
4

It is worth noting that a different expression of the expected travel time can be obtained.Indeed, the travel time at the stop y can be seen as the minimum of the total times of the linesserving the stop: y = min{wi + si : i ∈ Ln}. Let φ(y) denote the probability density functionof y and Φ(y) the complement of its cumulative distribution function. Since the line headwaysare statistically independent, the probability that the travel time at the stop y is greater thanor equal to a given value τ :
wi + si ≥ τ
is given by the product of the probabilities that for each line i:
Φ(τ) = Prob(y ≥ τ) =∏
i∈Ln
Prob(wi ≥ τ − si) =∏
i∈Ln
F i(τ − si). (5)
Furthermore, since φ(y) = 0 for y < 0
E[y] =∫ +∞
0τ φ(τ) dτ =
∫ +∞
0Φ(τ) dτ. (6)
Thus, combining (5) and (6), we have:
ET = E[y] =∫ +∞
0
∏i∈Ln
F i(τ − si) dτ. (7)
1.3 Bounded headway
If there exists a finite upper bound uj of the probability density function fj(w), for at least oneline j ∈ Ln, that is fj(w) = 0,∀w /∈ [0, uj ], then it may be useful to specify the upper and lowerlimits of the integrals of equations (2) and (4) for computational purposes. First, observe thatthe following holds for any line i ∈ Ln:
F j(w + si − sj) =
1, if w ≤ sj − si;∫ uj
w+si−sjfj(v) dv, if sj − si < w < uj + sj − si;
0, if w ≥ uj + sj − si.
(8)
In the first case, line i dominates line j regardless of the value of the line waiting time wj (thetotal time w + si proves to be not greater than the line travel time sj), while in the last casethe reverse is true.
For added insights, assume that the lines in Ln are indexed in non-decreasing order ofthe line travel time, that is: s1 ≤ s2 ≤ . . . ≤ sn, and denote Li = {j ∈ Ln : j ≤ i} andus = min{uj + sj : j ∈ Ln}. This leads to the following expression for the line probability:
πi =
{∫ us−si
0 γi(w) dw, if si < us;0, otherwise.
Then, the subset of the lines with positive probability is Lt, where t = max{i : i ∈ Ln, si < us}.
2 Relationships with the classical stop model without on-lineinformation
2.1 The classical model viewed as a particular instance of the proposedframework
The classical stop model is based on the assumption that the passenger will board the firstarriving carrier which belongs to the attractive set L∗ ⊆ Ln. Therefore, the probability of
5

boarding line i ⊂ L∗ is equal to the probability that a carrier of i is the first one to reach thestop. Since the line headways are assumed to be independent from each other, this probabilityis given by:
πi =∫ +∞
0fi(w)
∏j∈L∗\{i}
F j(w) dw, (9)
where fi(w) is the density of probability that a carrier of line i arrives after w units of time,while
∏j∈L∗\{i} F j(w) is the probability that none of the other carriers arrives before that of
line i.Using the same technique that has been adopted to derive equation (7), the expected waiting
time can be expressed as (Gendreau 1984):
EW =∫ +∞
0
∏i∈L∗
F i(w) dw. (10)
Similarly to the case with on-line information, the expected travel time is in turn obtained bysumming to the expected waiting time the product of the line travel time and the line probabilityfor each attractive line.
When there is some bounded headway, the upper limit of integration +∞ in (9) and (10)can be replaced by u = min{uj : j ∈ Ln}, because at least one carrier must arrive within timeu.
In contrast to the case with on-line information, the line travel times here are excluded fromthe expression of line boarding probabilities which depends solely on the headway distributionsbut are implicitly considered in the definition of the attractive set. It is worth noting then ifall lines had the same line travel time, si = sj ,∀i, j ∈ Ln, equations (2)-(3) would reduce toequation (9) and (4) to (10). The passenger choosing to board the carrier of the line whichprovided the shortest total travel time would indeed board the first arriving carrier. Therefore,the classical common lines model where the attractive set includes all available lines can be seenas a particular instance of the general model with on-line information.
2.2 The line travel times and the attractive set
Note that, in general, the above expressions of the line probabilities and of the expected waitingtime can be applied to any given subset L ⊆ Ln of all the lines serving a stop. Let ETL denotethe expected travel time from the considered stop to the destination corresponding to subset L.The attractive set L∗ is a subset of Ln that yields the least expected travel time, thus we have:ETL∗ ≤ ETL,∀L ⊆ Ln.
The determination of the attractive set L∗ requires in general the calculation of ETL for allpossible subsets of Ln. However, from a behavioral standpoint it is somewhat counter-intuitiveto consider an attractive set where any member of this set may have a larger line travel timethan the one of an excluded line and thus it is generally assumed that passengers only considerthe feasible sets Lj , with j = 1, . . . , n.
Under this assumption, a simple algorithm to determine the attractive set is to calculate inturn ETLi , for i = 1, . . . , n, and then choose: L∗ = argmin{ETLi : i = 1, . . . , n}. It is well known(Spiess 1984, Nguyen & Pallottino 1988) that in the particular case of exponential headwaysa greedy approach can be adopted, where the progressive calculation of the values ETLi canbe stopped as soon as the addition of the next line produces an increase of the expected traveltime. Hence, in contrast to the case with on-line information, the line travel times do not enterdirectly into the computation of the line probabilities and expected waiting times but ratherindirectly through the definition of the attractive set.
6

3 The Erlang headway distributions
Depending on the probability density functions of the line waiting times, expressions (2)-(3) and(4) may or may not have a closed form, and hence may or may not be easy to compute. Forpractical purposes, we will focus on a particular family of headway distributions that can beapplied to a large number of cases, namely the Gamma functions with integer parameter, whichare also known as Erlang distributions. Let the headway hi of each line i be a random variablewith an Erlang distribution having integer shape parameter mi and expected value 1/λi; thatis:
gi(h) =
{e−miλih (miλi)mi hmi−1
(mi−1)! , if h ≥ 0;0, otherwise.
The above distribution describes the sum of mi independent Poisson processes and thus thememory of the overall process lasts for mi elementary events. The shorter is the memory ofthe process the higher is its irregularity, for mi = 1, the Erlang distribution reduces to theexponential distribution, while for mi → +∞, it yields the deterministic headway. Both theseextremal distributions are widely used in transit models, while the Erlang distribution withgeneral shape parameter has been extensively investigated in Gendreau (1984) and in Marguier& Ceder (1984). In Bouzaıene-Ayari, Gendreau & Nguyen (2001) Erlang distributions are usedto describe the variability of the line headway in a network loading model for transit systemswith explicit vehicle capacity constraints.
Introducing the Erlang headway into formula (1) yields the following probability densityfunction of the line waiting time:
fi(w) =
λi e−miλiwmi−1∑k=0
(miλiw)k
k! , if w ≥ 0;
0, otherwise,
and the following complement of the cumulative distribution function:
F i(w) =
e−miλiwmi−1∑k=0
(1− kmi
) (miλiw)k
k! , if w > 0;
1, otherwise.
It is not difficult to show that here πi, EW and ET may be written as a sum of integralswhere each term has the following form:∫
β e−αx xr dx = −β e−αxr∑
k=0
r!k!
xk
αr−k+1+ c,
where α and β are real parameters, while r is an integer parameter and c is an additive constant.Therefore, for the Erlang distributions the computations required by the proposed model canbe performed in closed form. In Gendreau (1984) an efficient algorithm is proposed to computethe expected waiting time in the standard case without on-line information. This scheme canbe extended to the computation of the line probabilities and of the expected travel time in thepresent case with on-line information.
In the next two sections, we will take a closer look at the two extremal cases that pervadeexisting transit models.
7

3.1 The exponential case
Consider first the exponential headways. In this case, we have for each line i an exponentialwaiting time distribution with probability density function:
fi(w) =
{λi e−λiw, if w ≥ 0;0, otherwise.
We then have the following complement of the cumulative distribution function:
F j(w + si − sj) =
{e−λj(w+si−sj), if w > sj − si;1, otherwise.
To obtain the results for the case without on-line information it suffices to set the line traveltimes of all the different lines to a fixed value in the above expression, or equivalently to eliminatethem all together. This leads respectively to the well known expressions for the line probabilitiesand the expected waiting time:
πi =∫ +∞
0fi(w)
∏j∈Ln\{i}
F j(w) dw=∫ +∞
0λie−λiw
∏j∈Ln\{i}
e−λjw dw = λi
∫ +∞
0e−(
Pj∈Ln
λj)w
dw =λi
Λn,
EW =∫ +∞
0
∏i∈Ln
F i(w) dw =∫ +∞
0
∏i∈Ln
e−λiw dw =∫ +∞
0e−(
Pj∈Ln
λj)w
dw =1
Λn,
where Λn =∑n
j=1 λj denotes the combined frequency of all lines.
3.2 The deterministic case
With deterministic headways, we have a uniformly distributed waiting time for each line i withprobability density function:
fi(w) =
{λi, if 0 ≤ w ≤ 1/λi;0, otherwise,
where 1/λi = hi = ui. Consequently, equation (8) becomes:
F j(w + si − sj) =
1, if w ≤ sj − si;1− λj(w + si − sj), if sj − si < w < uj + sj − si;0, if w ≥ uj + sj − si.
Again, we may easily derive the following results for the case without on-line information:
πi =∫ u
0fi(w)
∏j∈Ln\{i}
F j(w) dw = λi
∫ u
0
∏j∈Ln\{i}
(1− λjw) dw,
EW =∫ u
0
∏i∈Ln
F i(w) dw =∫ u
0
∏j∈Ln
(1− λjw) dw.
8

4 Embedding the proposed stop model in transit assignmentprocedures
So far, we have proposed a method for determining the probabilities of the available lines andthe corresponding expected travel time for a single transit stop, assuming that the line traveltimes sj , j ∈ Ln, are exogenously given. However, a transit trip may involve several transfers,so that the line travel times themselves are expected travel times resulting from downstreamstop models. In order to obtain an optimal strategy in the framework of a transit assignmentwithout recurring to an explicit enumeration of hyperpaths, the following optimality principlemust hold: “all sub-strategies of an optimal strategy are optimal themselves”. To prove that theoptimality principle holds, we will investigate the sensitivity of the proposed stop model withrespect to changes of the line travel times.
In the case with on-line information, by definition, we have:
ET = E[min{wj + sj : j ∈ Ln}] =∫ +∞
0. . .
∫ +∞
0min{wj + sj : j ∈ Ln}
∏j∈Ln
fj(wj) dw1 . . . dwn.
The function ET is continuous in the space +n of the line travel time variables sj , j ∈ Ln.Meanwhile, note that the function min{wj + sj : j ∈ Ln} is not everywhere differentiable.Indeed, for any given wi, we have:
∂ min{wj + sj : j ∈ Ln}∂si
=
1, if wj ∈ (wi + si − sj ,+∞) ∀ j ∈ Ln \ {i};
0, if ∃ j ∈ Ln \ {i} : wj ∈ [0, wi + si − sj).
Where i is not the only line yielding the minimum total travel time, so that there exists anotherline j ∈ Ln \ {i} such that wj = wi + si − sj , the derivative is not well defined. However, atthese points the left partial derivative is 1 and the right partial derivative is 0. By splittingeach integral defined on [0,+∞) into the sum of two integrals defined on [0, wi + si − sj ] andon [wi + si − sj ,+∞), all the points such that wj = wi + si − sj , with j ∈ Ln \ {i}, are onthe boundary of the intervals of integration. These points form a set of null measure. Thus, byeliminating the zero valued integrals we obtain:
∂ET
∂si=
∫ +∞
0fi(w)
∏j∈Ln\{i}
∫ +∞
w+si−sj
fj(wj) dwj
dw.
The nested form reduces to a product of integrals since the probability density functions areindependent from each other. Taking into account equation (2)-(3), we obtain:
∂ET
∂si= πi. (11)
Equation (11) also holds in the case without on-line information, as we have:
ET = EW +∑i∈Ln
πisi,
where, based on (9) and (10), EW and πi, i = 1, . . . , n, are independent of the line travel times.Based on (11), since line probabilities are non-negative, the optimality principle holds for
the proposed stop models. Indeed, the expected travel time is minimized when all the line traveltimes are minimized.
9

5 Numerical examples
5.1 Common lines at a single stop
To illustrate the impact of on-line information at a stop on the distribution of loads, we firstlyapply the proposed framework to a simple case with three lines having the same headwayE[h] = 20 min and the following line travel times: s1 = 8 min, s2 = 14 min, s3 = 16 min. Inthe classical case without on-line information, regardless the level of irregularity, all the threelines are attractive, and since they have the same mean headway, they will have the same choiceprobability. On the contrary, in the case with on-line information it may happen that, basedon the line waiting times displayed at the stop, it is preferable to wait for a faster line insteadof boarding an incoming slower one. This produces higher probabilities for faster lines. Indeed,the probability of the fastest line has been found to vary from 52.9% for the exponential caseto 66.5% for the deterministic case; conversely, the probability of the slowest line varies from20.1% to 12.5%. Thus, in the deterministic case, the on-line information doubles the number ofpassengers choosing the fastest line and almost 2/3 of passengers leave the slowest line.
This small example shows that the on-line information may have a significant impact on theuse of the transit lines, which must be taken into consideration when simulating and dimensioningthe transit network for planning purposes.
We now analyze the impact of the on-line information on the expected travel and waitingtimes and the sensitivity of the two stop models with respect to the service irregularity. Considerthe example given in Table 1, where for simplicity all lines are assumed to have the same Erlangshape parameter m. The results are reported in Tables 2-3.
line i mean headway E[hi] travel time si
1 20 min 30 min2 15 min 40 min3 10 min 45 min
Table 1: Line attributes
m π1 π2 π3 EW ER ET1 0.587 0.257 0.156 6.81 34.92 41.732 0.653 0.233 0.114 6.52 34.22 40.743 0.687 0.218 0.095 6.55 33.61 40.164 0.707 0.209 0.084 6.60 33.35 39.9510 0.755 0.185 0.060 6.85 32.75 39.57
+∞ 0.805 0.160 0.035 7.27 32.12 39.39
Table 2: Line probabilities and travel times with on-line information
For the same service regularity, the expected travel time when on-line information is availableis systematically lower than that of the classical case. The relative difference of the expectedtravel time between the two cases may decrease or increase when the regularity increases, andin general is not monotonic, as shown by the above example where we obtain the improvements∆ET = (ETwithout info − ETwith info)/ETwithout info reported in Table 4.
With on-line information, we note that the fastest line, which is also the one with lowerfrequency, has a high share (always greater than 50%) which increases monotonically with theregularity of the service. For the standard case in which on-line information is not available, the
10

m π1 π2 π3 EW ER ET1 0.429 0.571 0 8.42 35.45 43.872 0.419 0.581 0 6.98 35.73 42.713 0.413 0.587 0 6.48 35.79 42.284 0.409 0.591 0 6.25 35.84 42.0910 1 0 0 11.02 30.00 41.02
+∞ 1 0 0 10.00 30.00 40.00
Table 3: Line probabilities and travel times without on-line information
m ∆ET1 4.88%2 4.61%3 5.01%4 5.08%10 3.53%
+∞ 1.53%
Table 4: Improvements due to the on-line information
fastest line has a lower share (always smaller than 50%) when the service is irregular, while itis the only one to be used when the service is regular.
As expected, in both cases the more regular the service is the lower the expected travel time is.In addition, this improvement is monotonic. It also appears that the impact of service irregularityon the expected travel time is considerably lower when on-line information is available at thestop. Indeed, the gap in terms of expected travel time between the deterministic and theexponential headways decreases from 9.67% to 5.94%.
In the case with on-line information, the expected waiting time increases with the regularityof the service as passengers accept to wait longer in order to board a line that takes less timeto reach the destination. Note that, in the case without on-line information, the number ofattractive lines decreases when the regularity increases.
5.2 The attractive set
In the case without on-line information, the determination of the attractive set can be solvedheuristically by the sequential approach proposed in subsection 2.2. That is, all the lines areadded in increasing order of their line travel times and the attractive set is the ordered set withthe least expected travel time. It’s worth noting that the greedy approach (Chriqui & Robillard1975), based on stopping the processes as soon as the addition of the next line produces anincrease of the expected travel time, can be applied only to the case with exponential headways(Marguier 1981).
For instance, consider the example given in Table 5. For exponential headways, as shown inTable 6, we have: ET 1 = 57.00, ET 1,2 = 49.10 and ET 1,2,3 = 40.47. While for deterministicheadways, as shown in Table 7, we have: ET 1 = 42.00, ET 1,2 = 42.30 and ET 1,2,3 = 41.14. Inthe latter case, the greedy approach produces the line set {1} while the attractive set is {1, 2, 3}.
Note that by rearranging the order of the lines according to the expected travel time of theline considered separately ({3, 1, 2} in Table 6 and {1, 3, 2} in Table 7), the greedy approach issuccessful. Moreover, the ordered sets obtained in this way are optimal compared to any otherset with the same number of lines. So far, we are neither able to prove that this result holds in
11

line i mean headway E[hi] travel time si
1 30 min 27 min2 50 min 38 min3 5 min 40 min
Table 5: Line attributes
line set info π1 π2 π3 EW ER ET1 N 1 0 0 30.00 27.00 57.002 N 0 1 0 50.00 38.00 88.003 N 0 0 1 5.00 40.00 45.00
1 2 N 0.618 0.372 0 18.25 30.85 49.101 3 N 0.136 0 0.830 3.82 36.89 40.712 3 N 0 0.081 0.875 3.93 38.07 42.01
1 2 3 N 0.125 0.068 0.771 3.68 36.79 40.471 2 3 Y 0.430 0.071 0.480 5.60 33.49 39.09
Table 6: The exponential case
line set info π1 π2 π3 EW ER ET1 N 1 0 0 15.00 27.00 42.002 N 0 1 0 25.00 38.00 63.003 N 0 0 1 2.50 40.00 42.50
1 2 N 0.700 0.300 0 12.00 30.30 42.301 3 N 0.083 0 0.917 2.36 38.92 41.282 3 N 0 0.050 0.950 2.42 39.90 42.32
1 2 3 N 0.081 0.047 0.872 2.29 38.86 41.141 2 3 Y 0.510 0.049 0.441 5.08 33.29 38.37
Table 7: The deterministic case
general nor to find a counterexample.When the on-line information is provided, the set of lines with positive probability is {1, 2, 3}
for both exponential and deterministic headways.Comparing the results obtained respectively for the two cases with and without on-line
information, we observe a remarkable difference in the line loads. In particular, in the casewith deterministic headways and without on-line information almost all users (87.2%) choosethe slowest and more frequent line 3 and just a few (8.1%) chooses the fastest and less frequentline 1, while in the case with on-line information line 1 is choosen by 51.0% of passengers andthe share of users choosing line 3 decreases to 44.1%.
5.3 Assignment on a small network
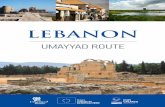
The transit network of Sioux Falls has been considered for a numerical application of the pro-posed framework. On a base network of 76 directed arcs and 24 nodes (all of which are centroids),the itineraries of 5 bus lines are defined, covering the entire network (each node is served by atleast one line). In particular, the original network presented in LeBlanc (1988) has been slightlymodified (see Figure 1) by moving the south terminal of line B from node 5 to node 21 so thatline A and line B overlap along the North-South direction between nodes 5 and 21. In addition,
12

line B is designed as a low frequency express line, while all other lines have a slow speed and afrequency that is twice higher. This yields a supply configuration more suitable for the presentinvestigation.
2423 22
21 20
191817
161514
13
12 11 109 8 76543
21
line i mean headway E[hi] speed Vi itinerary of line iA 10 min 15 km/h 1 3 4 5 9 10 15 22 21B 20 min 40 km/h 2 6 5 9 10 15 22 21C 10 min 15 km/h 12 11 10 16 17 19 20D 10 min 15 km/h 13 24 23 14 15E 10 min 15 km/h 7 8 16 18
Figure 1: Transit network nodes and arcs
The analysis is performed considering three Erlang headway distributions with differentshape parameter: m = 1 (exponential headway), m = 4, and m → +∞ (deterministic headway).
The results reported in Table 8 refer to an all or nothing network loading. The total timedecreases substantially with the service regularity, but the improvement due to the presenceof on-line information is not significant (less than 1%). The share of the fast line B increaseswith the service regularity and with the presence of on-line information. This result is morepronounced at the southern stops where the common lines A and B are in direct competitionfor a greater number of O/D pairs.
Other numerical results, not reported here, also show that the impact of service regularityand the presence of on-line information is less relevant for short distance O/D pairs where therelative weight of line waiting time with respect to the line travel time decreases. For this reason,on real networks the impact of providing on-line information on flow patterns may be light, yetdefinitely relevant.
Conclusion
In this paper we have developed a general framework for investigating passenger’s route choicein transit networks when on-line information about carriers arrival times at stops are available.
13

info Y Y Y N N Nm 1 4 +∞ 1 4 +∞
total time 4419 h 3946 h 3670 h 4441 h 3980 h 3703 hstops passengers share B share B share B share B share B share B5-9 838 0.345 0.360 0.387 0.321 0.331 0.3659-10 1110 0.375 0.388 0.406 0.325 0.326 0.35110-15 1648 0.443 0.466 0.472 0.322 0.297 0.34815-22 795 0.491 0.537 0.572 0.330 0.314 0.44522-21 275 0.516 0.593 0.615 0.331 0.345 0.67321-22 275 0.531 0.582 0.607 0.342 0.327 0.67322-15 795 0.508 0.548 0.557 0.342 0.316 0.42515-10 1648 0.475 0.496 0.492 0.350 0.318 0.35510-9 1110 0.496 0.502 0.505 0.424 0.438 0.4309-5 838 0.505 0.515 0.525 0.452 0.492 0.480
Table 8: Total times and shares on line B
Assuming that the ultimate passenger’s objective is to minimize the total travel time todestination, a new stop model is proposed for determining the probability of boarding each lineavailable at a given stop and the corresponding expected waiting time when headways haveindependent general distributions.
In addition, by showing that the classical common lines model may be interpreted as aparticular instance of the proposed framework we extend the existing results to cover generalheadway distributions.
Small size numerical examples are presented to illustrate the proposed framework. Usingthe Erlang family of distributions with various shape parameters, and in particular with theextremal parameters corresponding to deterministic and exponential headways, we compare theproposed model with the classical one. Drastic differences are observed in terms of proportionsof passengers boarding slow and fast lines, while the differences on travel times are less importantyet definitely relevant. Moreover, the impact of service regularity is significant for both cases.
These results imply that the existing models are inadequate to deal with the presence of on-line information at stops and service regularity, and thus may lead to distorted traffic patternsfor planning purposes.
Acknowledgment
We are grateful to the referees for their constructive comments that have lead to a much improvedpaper.
References
Bouzaıene-Ayari, B., M. Gendreau & S. Nguyen 1995, An equilibrium-fixed point model forpassenger assignment in congested transit networks, Publication 95-57, Centre de Recherhcesur les Transports, Universite de Montreal, Montreal, Canada.
Bouzaıene-Ayari, B., M. Gendreau & S. Nguyen 2001, ‘Modelling bus stops in transit networks:A survey and new formulations’, Transportation Science 35, 304–321.
14

Bowman, L.A. & M.A. Turnquist 1981, ‘Service frequency, schedule reliability and passengerwait times at transit stops’, Transportation Research A 15(6), 465–471.
Chriqui, C. & P. Robillard 1975, ‘Common bus line’, Transportation Science 9(2), 115–121.
Gendreau, M. 1984, Une etude approfondie d’un modele d’equilibre pour l’affectation des passa-gers dans les reseaux de transport en commun, PhD thesis, Departement d’informatique etde recherche operationnelle, Universite de Montreal, Canada.
Hasseltrom, D. 1981, Public Transportation Planning – A Mathematical Programming Ap-proach, PhD thesis, Department of Business Administration, University of Gothenburg,Sweden.
Jolliffe, J.K. & T.P. Hutchinson 1975, ‘A behavioral explanation of the association between busand passenger arrivals at a bus stop’, Transportation Science 9(3), 248–282.
Larson, R.C. & A.R. Odoni 1981, Urban Operations Research, Prentice-Hall, Englewoods Cliffs.
LeBlanc, L.J. 1988, ‘Transit system network design’, Transportation Research B 22, 383–390.
Marguier, P.H.J. 1981, Optimal strategies in waiting for common bus lines, Master’s thesis,Department of Civil Engineering, M.I.T., Cambridge, USA.
Marguier, P.H.J. & A. Ceder 1984, ‘Passenger waiting strategies for overlapping bus routes’,Transportation Science 18(3), 207–230.
Nguyen, S. & S. Pallottino 1988, ‘Equilibrium traffic assignment for large scale transit networks’,European Journal of Operational Research 37(2), 176–186.
Nguyen, S. & S. Pallottino 1989, Hyperpaths and shortest hyperpaths, in B. Simeone, ed.,‘Combinatorial Optimization’, Vol. 1403 of Lecture Notes in Mathematics, Springer-Verlag,Berlin, pp. 258–271.
Nguyen, S., S. Pallottino & M. Gendreau 1998, ‘Implicit enumeration of hyperpaths in logitmodels for transit networks’, Transportation Science 32(1), 54–64.
Seddon, P.A. & M.P. Day 1974, ‘Bus passenger waiting times in Greater Manchester’, TrafficEngineering and Control 15(9), 442–445.
Spiess, H. 1984, Contributions a la theorie et aux outils de planification des reseaux de transporturbain, PhD thesis, Departement d’informatique et de recherche operationnelle, Universitede Montreal, Canada.
Spiess, H. & M. Florian 1989, ‘Optimal strategies: A new assignment model for transit networks’,Transportation Research B 23(2), 83–102.
Wu, J.H., M. Florian & P. Marcotte 1994, ‘Transit equilibrium assignment: a model and solutionalgorithms’, Transportation Science 28(3), 193–203.
15