Rotor–stator contact dynamics using a non-ideal drive—Theoretical and experimental aspects
19
Rotor–stator contact dynamics using a non-ideal drive—Theoretical and experimental aspects Said Lahriri a,c , Hans I. Weber b , Ilmar F. Santos a,n , Henning Hartmann c a Technical University of Denmark, Department of Mechanical Engineering, Nils Koppels Alle´, Bygning 403, DK-2800 Kgs. Lyngby, Denmark b Pontifı ´cia Universidade Cato ´lica, PUC-Rio de Janeiro, Department of Mechanical Engineering, Rua Marquˆ es de S ~ ao Vicente, 225-Ga ´vea-22453-900 Rio de Janeiro, Brazil c Lloyds Register ODS Strandvejen 104A 1., DK-2900 Hellerup, Denmark article info Article history: Received 6 September 2011 Received in revised form 4 April 2012 Accepted 6 May 2012 Handling Editor: L.N. Virgin Available online 8 June 2012 abstract The possible contact between rotor and stator is considered a serious malfunction that may lead to catastrophic failure. Rotor rub is seen as a secondary phenomenon caused by a primary source, i.e. sudden mass unbalance, instabilities generated by aerodynamic and hydrodynamic forces in seals and bearings among others. The contact event gives rise to normal and friction forces exerted on the rotor at impact events. The friction force plays a significant role by transferring some rotational energy of the rotor to lateral motion. A mathematical model has been developed to capture this for a conventional backup annular guide setup. It is reasonable to superpose an impact condition to the rub, where the rotor spin energy can be fully transformed into rotor lateral movements. Using a nonideal drive, i.e. an electric motor without any kind of velocity feedback control, it is even possible to stop the rotor spin under rubbing conditions. All the rotational energy will be transformed in a kind of ‘‘self-excited’’ rotor lateral vibration with repeated impacts against the housing. This paper studies the impact motion of a rotor impacting a conventional backup annular guide for the case of dry and lubricated inner surface of the guide. For the dry surface case, the experimental and numerical analysis shows that the rotational energy is fully transformed into lateral motion and the rotor spin is stopped. Based on this study this paper proposes a new unconventional backup bearing design in order to reduce the rub related severity in friction and center the rotor at impact events. The analysis shows that the rotor at impacts is forced to the center of the backup bearing and the lateral motion is mitigated. As a result of this, the rotor spin is kept constant. & 2012 Elsevier Ltd. All rights reserved. 1. Introduction The dynamics and behavior of the rotating system has been studied extensively in the past by many researchers. One of the initial studies of a high-speed rotor touching a rigid body was conducted by Szcygielski [1]. The model was based on a gyro pendulum touching a plane rigid body. The mathematical model was piecewise linear and globally strongly nonlinear. The preliminary experiments showing the trajectories of the gyro axis showed a good qualitative agreement with the analytical and experimental results. Among many, Muszynska [2] presented a comprehensive literary survey on rub- related phenomena up to 1989. Additionally, Beatty [3] introduced a mathematical model where the stiffness is given in a Contents lists available at SciVerse ScienceDirect journal homepage: www.elsevier.com/locate/jsvi Journal of Sound and Vibration 0022-460X/$ - see front matter & 2012 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/j.jsv.2012.05.008 n Corresponding author. Tel.: þ45 4525 6269; fax: þ45 4593 1577. E-mail address: [email protected] (I.F. Santos). Journal of Sound and Vibration 331 (2012) 4518–4536
-
Upload
independent -
Category
Documents
-
view
3 -
download
0
Transcript of Rotor–stator contact dynamics using a non-ideal drive—Theoretical and experimental aspects

Contents lists available at SciVerse ScienceDirect
Journal of Sound and Vibration
Journal of Sound and Vibration 331 (2012) 4518–4536
0022-46
http://d
n Corr
E-m
journal homepage: www.elsevier.com/locate/jsvi
Rotor–stator contact dynamics using a non-ideal drive—Theoreticaland experimental aspects
Said Lahriri a,c, Hans I. Weber b, Ilmar F. Santos a,n, Henning Hartmann c
a Technical University of Denmark, Department of Mechanical Engineering, Nils Koppels Alle, Bygning 403, DK-2800 Kgs. Lyngby, Denmarkb Pontifıcia Universidade Catolica, PUC-Rio de Janeiro, Department of Mechanical Engineering, Rua Marques de S~ao Vicente,
225-Gavea-22453-900 Rio de Janeiro, Brazilc Lloyds Register ODS Strandvejen 104A 1., DK-2900 Hellerup, Denmark
a r t i c l e i n f o
Article history:
Received 6 September 2011
Received in revised form
4 April 2012
Accepted 6 May 2012
Handling Editor: L.N. Virginrise to normal and friction forces exerted on the rotor at impact events. The friction
Available online 8 June 2012
0X/$ - see front matter & 2012 Elsevier Ltd.
x.doi.org/10.1016/j.jsv.2012.05.008
esponding author. Tel.: þ45 4525 6269; fax:
ail address: [email protected] (I.F. Santos).
a b s t r a c t
The possible contact between rotor and stator is considered a serious malfunction that
may lead to catastrophic failure. Rotor rub is seen as a secondary phenomenon caused
by a primary source, i.e. sudden mass unbalance, instabilities generated by aerodynamic
and hydrodynamic forces in seals and bearings among others. The contact event gives
force plays a significant role by transferring some rotational energy of the rotor to
lateral motion. A mathematical model has been developed to capture this for a
conventional backup annular guide setup. It is reasonable to superpose an impact
condition to the rub, where the rotor spin energy can be fully transformed into rotor
lateral movements. Using a nonideal drive, i.e. an electric motor without any kind of
velocity feedback control, it is even possible to stop the rotor spin under rubbing
conditions. All the rotational energy will be transformed in a kind of ‘‘self-excited’’ rotor
lateral vibration with repeated impacts against the housing. This paper studies the
impact motion of a rotor impacting a conventional backup annular guide for the case of
dry and lubricated inner surface of the guide. For the dry surface case, the experimental
and numerical analysis shows that the rotational energy is fully transformed into lateral
motion and the rotor spin is stopped. Based on this study this paper proposes a new
unconventional backup bearing design in order to reduce the rub related severity in
friction and center the rotor at impact events. The analysis shows that the rotor at
impacts is forced to the center of the backup bearing and the lateral motion is
mitigated. As a result of this, the rotor spin is kept constant.
& 2012 Elsevier Ltd. All rights reserved.
1. Introduction
The dynamics and behavior of the rotating system has been studied extensively in the past by many researchers. One ofthe initial studies of a high-speed rotor touching a rigid body was conducted by Szcygielski [1]. The model was based on agyro pendulum touching a plane rigid body. The mathematical model was piecewise linear and globally strongly nonlinear.The preliminary experiments showing the trajectories of the gyro axis showed a good qualitative agreement with theanalytical and experimental results. Among many, Muszynska [2] presented a comprehensive literary survey on rub-related phenomena up to 1989. Additionally, Beatty [3] introduced a mathematical model where the stiffness is given in a
All rights reserved.
þ45 4593 1577.

Nomenclature
y lateral displacement of the disk (mm)z lateral displacement of the disk (mm)b angular displacement of the disk (rad)G angular displacement of the disk (rad)f angular spin of the disk (rad/s)o angular velocity of the disk (Hz)O rotational speed of the motor (Hz)IP polar mass moment of inertia of the journal
(kgm2)ID transverse mass moment of inertia of the
journal (kg m2)MD mass of the disk (kg)
e eccentricity (m)j0 phase of the unbalanced mass (rad)cii damping characteristics, external viscous
damping (N s/m)kii stiffness characteristics originating from the
flexible shaft (N/m)L length of the shaft (m)RD radius of the disk (m)r0 clearance (m)E Young modulus (N/m2)I area moment of inertia (m4)N normal force acting upon contact (N)mk kinetic friction coefficient (dimensionless)
S. Lahriri et al. / Journal of Sound and Vibration 331 (2012) 4518–4536 4519
piecewise linear form. Due to the non-smooth behavior in stiffness and rubbing forces, the system can exhibit complicatedvibration phenomena. Studies on these rubbing phenomena revealed that the rotating system showed a rich class ofnonlinear related dynamics such as sub and super-synchronous responses, quasi-periodic responses and even chaoticmotions caused by the non-smooth system which can exhibit different types of motions. In fact, the possibility of chaoticbehavior for rotors upon rubbing was suggested by Ehrich [4]. To capture the phenomena, he based his mathematicalmodel representing this motion on a nonlinear spring system. Moreover, Li and Paıdoussis [5] investigated the dynamics ofthe system analytically and numerically, simulating the dynamic behavior through phase plane plots, bifurcation diagramsas well as Poincare maps using the dry friction coefficient and the eccentricity of the rotor imbalance as controlparameters. Additionally, Isakson [6] simulated the dynamical behavior of a rotor interacting with non-rotating parts. Forthis, a quasi-static solution was derived for a system where the stator offset was neglected and only valid for constantangular velocity of the rotor. In some cases, discontinuous and multivalued solution were obtained. He also demonstratedthat a steady state solution existed for a system with stator offset and continuous rubbing contact. Piccoli and Weber [7]investigated and presented an application for chaotic motion identification from a measured signal obtained throughexperiment. They assessed the measured system that demonstrated chaotic motion by evaluating Poincare diagrams,Lyapunov exponents and correlation dimension by state space reconstructed with delayed co-ordinates.
The assessment established that the system was chaotic. During rub and impact between the rotor and the stator, a fullannular backward rub or partial impact condition can be developed. When the rub is developed into full annular rub, therotor vibration shows backward orbiting (precession) due to the present tangential friction force. This feature is normallyused to identify rotor-to-stator rub. In fact, the full annular backward rub and the impact motion can be avoided bylubricating the surfaces and thereby decreasing the surface friction coefficient. However, forward rub can still occur evenin cases with lubricated surfaces. Inoue et al. [8] theoretically and experimentally demonstrated the suppression of theforward rubbing by introducing a directional difference in the support stiffness of the guide or the backup bearing. Thiswas carried out by supporting the backup bearing with rubber attached in one direction in order to have an asymmetricbearing support. The study revealed that the rotating shaft can escape from the forward rubbing condition to a non-contacting state of much lower rotational speed than in cases of symmetric support conditions. In the test rig, the forwardrub was observed at 600 rpm. When the rotational speed was further increased, the backward harmonic component beganto occur from about 700 rpm, indicating that the shaft orbit became elliptic. At a slight increase in the rotational speed to750 rpm, the shaft escaped from the forward rubbing condition to the noncontacting condition with small amplitudes.
The onset is normally due to a sudden collision between the rotor and the guide or catcher bearings. Previous studieshave shown that the onset of the rubbing phenomena was caused by large amplitudes at critical speeds. Yanabe et al. [9]investigated the non-stationary vibration of a rotor due to collision with an annular guide during passage of critical speeds.The analyses were based on the fundamentals of collision and contact force theory. The outcome of this study revealed thata rotor cannot pass through the critical speeds due to the occurrence of diverging backward whirl caused by the collisionwith the guide.
However, most of the above mentioned works are carried out taking the angular velocity of the rotor as constant duringthe rub and impact in the analyses. In this way, the computation of the phase plane together with the Poincare sectionsand the co-dimensional one bifurcation diagrams are enabled. This study and the work of Yanabe et al. [9] and Bartha [14]have shown that for some cases it is possible to stop the rotor spin under rubbing conditions and impacts due to thefriction. This paper gives an original theoretical and experimental contribution to the field of rotor–stator dynamics byinvestigating the impact motion of a rotor against a conventional annular backup guide and an unconventional annularguide build by four adjustable pins. The conventional backup bearing has been extensively studied in the past and by theabove cited researchers. However, using a non-ideal drive, the outcome of this study showed that the rotor spin is stoppedat impacts. The torque generated by the motor is inadequate to maintain a constant velocity and overcome the friction

S. Lahriri et al. / Journal of Sound and Vibration 331 (2012) 4518–45364520
related rub during impacts. The rotational energy is transformed into rotor lateral vibration with repeated impacts againstthe guide. The new type of backup bearing is therefore employed in this work. The four pins prevent a full annular rub andwhirling state and mitigate the lateral motion of the rotor.
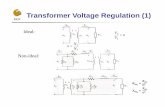
2. Test facilities—rotor and two types of backup bearings
Two types of backup bearings are employed and investigated in this study. The first test setup consists of aconventional annular guide, see Fig. 1(a) and (b), catching the impacting rotor and preventing damage. The surfacecondition of this annular guide can either be dry or lubricated. In the lubricated case the friction force exerted between thetwo sliding bodies is reduced, facilitating the rotor to keep a constant angular velocity. A new backup bearing design isrealized in order to improve the behavior with regards to the impact motion and friction. The new bearing model has beendeveloped at PUC-Rio. The objectives of this particular design are to reduce the lateral motion of the rotor and keep aconstant angular spin. Fig. 1(c) and (d) depicts the new bearing design. The idea is to utilize pin connections that center thedisk during the impacts. In this way, the disk is forced to the center and the lateral motion is mitigated. The four pins areadjustable, which allows the clearance to be customized. Using this new design, the disk can encounter one or two pins atthe same time. Thus, if the disk is exposed to a sudden drop or impulse, the movement will be restricted in a ‘‘kind ofsquare’’ as the rotor impacts the pins. However, the angular velocity is kept constant and the phenomenon where therotational energy is transformed in a kind of ‘‘self-excited’’ rotor lateral vibration is prevented as is the diverging fullannular rub state.
3. Mathematical model of the rotating disk
3.1. Inertial and moving referential frames and transformation matrices
The system is considered as a lumped mass system where the mass of the thin shaft is negligible compared to that ofthe disk and disregarded in the modelling and in the analyses. In other words the flexible rotating shaft is consideredmassless. The disk is considered a rigid body, the restoring forces acting on it originate from the deflection of the thin shaft,and will be represented by linear and angular springs using beam theory. The shaft deflections and definition of thecoordinate system is given in Fig. 2. The motion of the disk is described with two linear motions, y and z, respectively, andthree angular motions, b, G and f, respectively. The motion of the disk is described with help from three different movingreference frames obtained using consecutive rotations which is illustrated in Appendix A.
Due to unbalance mass in the disk, the center of mass is displayed from the geometric center of gravity. The positionvector B3
e is easily written using the moving referential frame B3, as illustrated in Fig. 3.
Fig. 1. (a) Picture of the annular guide experimental setup, (b) mechanical model of the annular guide, (c) picture of the new unconventional disk-pin
contact design, experimental setup, (d) mechanical model of the new unconventional disk-pin contact design.

Fig. 2. (a) First and second modes of the disk, (b) hanging massless thin shaft with attached disk, (c) rotations of the disk.
Fig. 3. (a) Deflected shape in the Inertial ðX,ZÞ plane, (b) deflected shape in the Inertial (Y,Z) plane.
S. Lahriri et al. / Journal of Sound and Vibration 331 (2012) 4518–4536 4521
The position vector from the geometric center to the center of mass, CM, is in the inertial frame given to
IrCM ¼ IrþTTGTT
bTTfB3
e ¼0
y
z
8><>:
9>=>;þTT
GTTbTT
f
0
e cos j0
e sin j0
8><>:
9>=>; (1)
The absolute linear velocity of the disk mass center is given to
Iv ¼qqt IrCMð Þ ¼
va
vb
vc
8><>:
9>=>;¼
0
_y
_z
8><>:
9>=>;þ
qqt
TTGTT
bTTf
0
e cos j0
e sin j0
8><>:
9>=>;
0B@
1CA (2)
3.2. Dynamics of the rigid disk, energy consideration
The total kinetic energy of the disk related to the linear and angular motion is written as:
Ekin ¼1
2 IvT MIvþ
1
2 B3xT M �x¼
1
2
va
vb
vc
8><>:
9>=>;
T MD 0 0
0 MD 0
0 0 MD
264
375
va
vb
vc
8><>:
9>=>;þ
oa
ob
oc
8><>:
9>=>;
T IP 0 0
0 ID 0
0 0 ID
264
375
oa
ob
oc
8><>:
9>=>; (3)
Upon introducing the absolute angular velocity equation (26) and the absolute linear velocity equation (2) into Eq. (3),and disregarding higher order terms of the eccentricity such as OðenÞ n¼ 2;3 and the linear motion in the x-direction, thekinetic energy of the disk is expressed in Appendix A.
The equations of motion for the disk is found by using Lagrange equation:
qqt
qEkin
q _qi
� ��
qEkin
qqi
� �þ
qEpot
qqi
� �¼F i, i¼ 1;2, . . . ,5 (4)

S. Lahriri et al. / Journal of Sound and Vibration 331 (2012) 4518–45364522
Here, the generalized coordinates are designated q1 ¼ y, q2 ¼ z, q3 ¼ b, q4 ¼G and q5 ¼f. As the disk is consideredrigid, there is no potential energy stored on the disk itself, thus Epot ¼ 0. The shaft is considered massless, thus the kineticenergy associated to its movements is disregarded in the analysis. Furthermore, the spin of the disk is varying due to thevariable torque of the motor and the reduction in spin during rub and impacts. Such forces are included later on asgeneralized forces F i (i¼ 1;2, . . . ,5) together with the restoring forces coming from the flexible shaft. The equations ofmotions are written in Appendix A.
3.3. Generalized forces F i
The generalized forces on the right hand side of Eqs. (28)–(32) are for this particular system written as:
F y ¼F contact,y�F restoring,y
F z ¼F contact,z�F restoring,z
Fb ¼�F restoring,b
FG ¼�F restoring,G
Ff ¼F contact,f�Fmotor (5)
In the following the generalized forces are outlined and derived for the vertically suspended shaft-rotor system.
3.3.1. Restoring forces
The restoring forces originate from the deflected shape of the shaft. The torsional modes are not considered in thisstudy. The mass and inertia of the shaft are neglected and only the first bending modes are considered as illustrated inFig. 2(a). These particular restoring forces are found by applying Beam Theory. For the arrangement as presented in Fig. 2and in Fig. 6(a), the shaft is considered as clamped at the drive end due to the rigid ball bearing connecting the shaft andthe driving motor through a flexible coupling, preventing the shaft from bending at the motor location (thereby protectingthe motor), and free at the disk location. The shaft is considered as a beam element where the stiffness matrix isconstructed by deriving the stiffness coefficients for the node located at the free end in the two lateral direction y and z andfor the two rotations b and G, respectively. Hence, for each equation of motion a general expression of the stiffnesscoefficient in conjunction with the damping coefficients cii is derived:
F restoring,y ¼ cyy _yþcyz _zþcyb_bþcyG
_GþkyyyþkyzzþkybbþkyGG (6)
F restoring,z ¼ czy _yþczz _zþczb_bþczG
_GþkzyyþkzzzþkzbbþkzGG (7)
F restoring,b ¼ cby _yþcbz _zþcbb_bþcbG _GþkbyyþkbzzþkbbbþkbGG (8)
F restoring,G ¼ cGy _yþcGz _zþcGb_bþcGG _GþkGyyþkGzzþkGbbþkGGG (9)
It is worth to mention that the damping for this particular system is only applied in the principal direction for thelateral movement of the shaft. This slightly damping accounts for the conical lateral movement of the shaft and accountsfor the coupling effect due to the mounting procedure. This damping is derived as an equivalent external viscous damping.The order of magnitude of this external damping is determined by experiments and derived later. It is important tohighlight, that internal material damping and the effect of this internal damping such as given in the work of Ziegler [24],Gasch [25], Segiyama et al. [26] and Mukherjee et al. [27], in a continuous flexible shaft is not considered in this modellingand analyses, once the shaft is treated as massless component of the non-conservative dissipative system. Thuscyz ¼ cyb ¼ cyG ¼ czy ¼ kzb ¼ czG ¼ cby ¼ cbz ¼ cbG ¼ cGy ¼ cGz ¼ cGb ¼ 0. Only cyy and czz are applied as non-zero. The stiffnesscoefficients for the depicted modes are given to; kyy ¼ kzz ¼ 12ðEI=L3
Þ , kyG ¼ kGy ¼ kzb ¼ kbz ¼�6ðEI=L2Þ, kbb ¼ kGG ¼ 4ðEI=LÞ
and kyz ¼ kyb ¼ kzy ¼ kzG ¼ kby ¼ kbG ¼ kGz ¼ kGb ¼ 0.
3.3.2. Contact and rub forces
In this study the disk is considered infinitely thin for contact and rub properties. Hence, the impact end rubbingbetween the disk and the annular guide is modeled as contact and friction forces exerted on the disk. The intermittentcontact forces are only applied in the lateral directions, y and z, respectively. First, the contact and rub forces exerted onthe disk are derived for the annular guide setup. By considering Fig. 4 the disk encounters the annular guide when rZr0,
where r¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðy�y0Þ
2þðz�z0Þ
2q
. The annular guide has coordinates y0,z0
� �. The disk displacement is given by y and z. The
penetration of the disk into the annular guide is given to d¼ r�r0, where dy and dz are the penetration in the two lateral
direction, respectively. (A) designates the center of the annular guide, (B) designates the center of the disk and (a)designates the contact angle.

Fig. 4. Subsystem, impact motion and forces.
S. Lahriri et al. / Journal of Sound and Vibration 331 (2012) 4518–4536 4523
When the disk encounters the ring/stator, a radial impact force N and a tangential rub force Nmkare exerted in the
lateral directions, y and z, respectively. A Coulomb model is employed for modeling the friction force. The contact modelused in this work is a continuous model, also referred as compliant contact model, in which the forces and deformationsvary and act in a continuous manner during the impacts. In this method, when contact between the bodies is detected, aforce perpendicular to the plane of collision is applied. This force is typically applied as a spring–damper element. Theanalysis may be performed in the usual way by simply adding the contact forces to the equations of motion during theiraction period. Gilardi et al. [15] give a comprehensive literary survey on contact dynamics and present varies contactmodels. Different models have been postulated to represent the interaction force at the surfaces of two contacting bodies.The first contact model was developed by Hertz [16] and is based on the theory of elasticity to calculate local indentationwithout the use of damping. Hunt and Crossley [17] proposed a model based on Hertz’ theory of contact with a non-lineardamping force defined in terms of local penetration and the corresponding rate. For this proposed impact model, Bartha[14] was the first to use it for rotor-to-stator contact dynamics. A further extension of this contact force model withdamping is suggested by Lankarani and Nikravesh [18]. Applying this contact force model Flores et al. [19] givecomparisons of different contact force models for impacts within a revolute clearance joint in a basic slider–crankmechanism. Furthermore, this contact force model has been utilized extensively in the work of Flores et al. [20–23] for thestudy of mechanical systems with revolute joints. This contact force model is employed in this work and it is expressed asan explicit function of local penetration, d. Thus
N¼ Kh � dnþDh �
_d (10)
The normal contact force is separated into an elastic and dissipative force, accounting for the energy dissipation duringimpacts. This model considers the material and geometric properties of the colliding surfaces as well as information of theimpact velocity. The stiffness parameter Kh depends only on the contact stiffness between the colliding surfaces, on thematerial properties and on the shape of the contact. For the two spheres in contact, the disk and the annular backupbearing, the generalized stiffness coefficient is a function of the radii of the spheres RD and RB and of the materialproperties of the disk and backup bearing, respectively. One has
Kh ¼4
3ðsDþsBÞ
RDRB
RDþRB
� �1=2
(11)
where the material parameters sD and sB are given by
sk ¼1�n2
k
Ek, k¼D,B (12)
The quantities nk are the Poisson ratio associated with each sphere. The quantity Dh is a hysteresis coefficient and _d is therelative impact velocity in Eq. (10). The hysteresis coefficient is written as a function of penetration as:
Dh ¼ w _dn
(13)
The hysteresis factor is given by
w¼ 3Khð1�e2Þ
4 _dð�Þ
(14)

S. Lahriri et al. / Journal of Sound and Vibration 331 (2012) 4518–45364524
The normal contact force is finally written as:
N¼ Khdn 1þ
ð1�e2Þ
4
_d_dð�Þ
" #(15)
where e is the restitution coefficient. The restitution phase starts at this contact point and ends when two bodies separatefrom each other. The energy loss due to the motion in the normal direction can be expressed in terms of this coefficient. _dis the relative penetration velocity, and _d
ð�Þis the initial impact velocity. The exponent n can for circular and elliptical
contacts be set to 1.5. The contact angle is taken as the relative contact angle between the two bodies:
tan a¼ ðyÞðzÞ
(16)
The frictional force acting between the disk and annular guide is considered as a Coulomb friction force. The normal andfriction forces acting on the disk at each lateral direction with the operational sign according to Fig. 4 can be expressed as:
F contact,y ¼N � ð�cos aþmk sin aÞ (17)
F contact,z ¼N � ð�sin a�mk cos aÞ (18)
For every impact and rub, these forces act on the disk and annular guide and are imposed on the right hand side of Eqs.(28) and (29), respectively.
3.3.3. The new backup bearing design
Considering the forces exerted on the disk for the new backup bearing design, see Fig. 5, the movement of the disk isrestricted by the pin connections. The generic representation of the physical area of movement of the disk within the fourpin connection is illustrated within the area outlined by the blue circular segments. Therefore, the disk can eitherencounter one or two pins at the same time, depending on the magnitude of the clearance. In order to facilitate thenumerical implementation of the restricted area of movement, an equivalent system is employed. This is illustrated by thered dashed line representing the border lines to collision in Fig. 5(a). Fig. 5(b) illustrates the forces exerted on the disk as itencounters the dashed line. These are the sum of the forces exerted by the pins. The methodology of deriving these contactforces is similar to the approach given for the annular guide.
3.3.4. Torque due to friction
The Coulomb friction torque given on the right hand side in Eq. (5) is stated as:
F contact,f ¼N � Rdmk signð _fÞ (19)
However, difficulties arise when modeling with friction and in particular with Coulomb friction. These difficulties arisedue to the complexity of low velocity and in particular the stick–slip process. In the slip phase, the friction is simply aconstant force opposing the motion. In the stick phase, the relative motion is null and friction appears as a constraintmaintaining the zero-velocity between the rubbing surfaces. In addition to this, when employing a Coulomb frictionmodel, the model exhibits no friction force at zero velocity and therefore cannot represent the stick to slip transitionproperly. Therefore, PiedbŒuf et al. [13] present an approach for facilitating the phenomenon of low velocity. Using asimple model, the conditions are written as:
if
9 _f940 ) F contact,f ¼N � Rdmksignð _fÞ
_f ¼ 0 ) if
Fmotor oF contact,f )
F contact,f ¼Fmotor
Fmotor ZF contact,f )
F contact,f ¼N � Rdmk signðFmotorÞ
8>>>><>>>>:
8>>>>>>><>>>>>>>:
(20)
Fig. 5. Subsystem, impact motion and forces for the new backup bearing design. (For interpretation of the references to color in this figure caption, the
reader is referred to the web version of this article.)

S. Lahriri et al. / Journal of Sound and Vibration 331 (2012) 4518–4536 4525
4. Theoretical and experimental results
The objective of this frame of work is to study the behavior of the disk motion when it encounters the stator ring. Theangular velocity of the disk is studied with a particular view to the friction coefficient. A test rig is realized in order tovalidate the mathematical model and capture the impact motion. Fig. 6 depicts the experimental setup conducted at PUC-Rio. The test rig, in short, is composed of a AC electrical motor, a velocity sensor, a shaft, an annular guide andhousing, a rotor and proximity sensors. The stator is fixed to a base structure, through four bolts arrangedsymmetrically. The AC electrical motor is controlled by a frequency inverter that drives the rotor–shaft assembly. Table 1lists the parameters employed in the experimental and in the numerical work.
Fig. 6. (a) Test setup picture, (b) new backup bearing design, (c) attached disk within the new backup bearing design.
Table 1Parameters employed in the analyses.
Material propertiesE Young modulus 2:1� 1011 N=m2
r Density 7850 kg=m3
Diskmd Mass 2.46 kg
Rd Radius 0.05 m
h Height 0.04 m
e Eccentricity 1� 10�5 m
Id Transverse mass moment of inertia 1:87� 10�3 kg m2
Ip Polar mass moment of inertia 3:08� 10�3 kg m2
ShaftL Length 0.620 m
d Diameter 0.008 m
StatorRs Internal radius 0.0505 m
r0 Clearance 0.0005 m
mk Friction coefficient; dry, greased 0:5670:01, 0:0870:01

S. Lahriri et al. / Journal of Sound and Vibration 331 (2012) 4518–45364526
4.1. Experimental characteristics of the torque generated by the electric AC-motor
The experimental work in this study of characterizing the driving torque from the AC-Motor was carried out in Alamo[11]. The electric AC-motor of 0.12 kW utilized in this frame of work is controlled by a frequency inverter where thefrequency band of operation ranges from 0 Hz to 60 Hz. The two phase induction motor has the maximum rotational speedof the magnitude of 1800 rpm. The rotational speed of the motor is controlled by a frequency inverter. The torque is givenas a function of the rotating speed of the motor. The torque curves obtained experimentally are computed for differentrotational speeds of the motor. A flexible coupling is mounted at the location of the driving motor, connecting the shaftwith the driving motor through a ball bearing in order to reduce and prevent lateral motions and vibration of the shaftaffecting the motor, and reducing the influence of the disk eccentricity and shaft misalignment. The experimental data isobtained by measuring the mechanical friction, the braking friction, as given in Crandall et al. [12]. Fig. 7(a) depicts threetorque curves for different frequencies imposed on the inverter and plotted against the speed of the motor, one for2� 9:0 Hz, one for 2� 12 Hz and finally one obtained as an average of the two curves.
An expression of the characteristic torque curve is determined by employing a third order polynomial curve fit to themedian curve given in Fig. 7(a):
Fmotor ¼ C �0:002441OC
� �3
þ0:177OC
� �2
�5:608OC
� �þ290:65
" #(21)
Fmotor represents the driven torque multiplied by a constant C. C is proportional to the driving frequency imposed on theinverter. As an example; if the frequency in the inverter is set to 2� 100 rad=s the value of the constant is set to C ¼ 100
66 .Fig. 7(b) shows various curves of the motor torque to different frequencies imposed on the inverter. The torque equation(21) is imposed on the right hand side of Eq. (5).
4.2. Experimental and numerical investigation of the behavior of the disk
In the experimental part, the disk motion is measured by two proximity sensors, in the y and z direction, respectively.Due to impacts, the sampling frequency is taken to 6400 Hz. The numerical integration is based on the ode15s stiff solverin MATLAB. Utilizing this solver, an event function has been implemented in order to switch between the different cases ofcontact and no contact. The presentation and comparison of the results are facilitated by presenting the following plots:
1.
Fig
Time series of the motion in the two lateral directions, y and z, respectively.
2. Trajectory of the lateral motion of the disk within the clearance. 3. The angular velocity of the disk plotted against time.If not otherwise stated, the parameters listed in Table 1 are employed in the numerical analyses. The internal materialdamping of the thin shaft with a diameter of 8 mm and with the length of 620 mm attached to a heavy disk is completelynegligible. The external viscous damping applied in the principal direction for the lateral movement of the shaft in themathematical formulation, originates from the conical movement and accounts for the mounting procedure where theshaft is connected to the driving motor through a ball bearing and a coupling. The order of magnitude of this equivalentexternal damping is determined by experiments. This is conducted, in order to compute the logarithmic decay of thetransient response of the lateral motion of the shaft and compute the damping factor. The transient response of the disk-shaft setup, as depicted in Fig. 6, is measured in the lateral direction by displacing the disk and measuring the decay. Fig. 8depicts the transient response in the y-direction. The damping factor associated to the lateral motion is determined by the
. 7. (a) Characteristic torque curve of the AC-motor, obtained experimentally, (b) characteristic torque curves obtained for different values of C [11].

Fig. 8. Transient motion in y direction.
Table 2Values and number of amplitudes, transient response.
y0 0.1088 m/s2
y10 0.02046 m/s2
S. Lahriri et al. / Journal of Sound and Vibration 331 (2012) 4518–4536 4527
following expression:
z¼
1
2p � N� ln
y0
yN
� �
1þ1
2p � N� ln
y0
yN
� �� �2(22)
where N is the number of oscillations, y0 is the first peak value and yN the final peak value according to the number ofoscillations taken into consideration. Table 2 lists the peak values taken from the transient response depicted in Fig. 8. Thedamping factor is determined to z1 ¼ 0:027. This damping factor is employed in the numerical analyses and serves as aindication of the order of magnitude of the damping associated to the lateral motion. However, damping factors associatedto higher modes due to impact between the disk and the stator are not considered in this study. Two equivalent viscousdamping coefficients are created and included in the modelling in such a way that they affect only the lateral motion of thedisk, i.e. dii ¼ dii ¼ 2z
ffiffiffiffiffiffiffiffiffikiim
p, ii¼yy or ii¼zz.
4.3. Comparison between experiments and numerical results for o¼ 10 Hz, conventional annular guide setup
4.3.1. Experimental study
The thorough study conducted in this work revealed that factors such as the magnitude of the impulse velocitiesexerted on the disk, causing it to encounter and impact the annular guide, the magnitude of the eccentricity and thesurface kinetic friction coefficient, have a significant effect on the impact motion that leads to the phenomenon where therotational energy of the rotor is fully transformed into lateral motion. Consequently, the rotor spin is stopped under suchrubbing conditions. It is therefore crucial to establish the bounds and in particular the lower bounds of these parameterscausing this behavior. The impulse velocity exerted on the disk during the experiments is studied to estimate the order ofmagnitude of the velocities causing the disk to undergo this particular impact motion. As the disk is vertically supportedby the shaft, a sudden impulse is given to the disk in order for it to encounter and impact the annular guide.
Fig. 9 depicts the motion of the disk when an impulse exerted on the disk, causes it to slightly graze the surface of theannular guide. Hereupon, it settles towards the center of the annular guide. The trajectory plot depicts the motion of thecenter of the disk within the annular guide clearance. The angular velocity of the disk is unaffected for this condition andthe disk execute a forward whirl. The velocities of the motion of the disk is depicted in Fig. 10. Such velocities are obtainedby numerical differentiation of the displacements given in Fig. 9(a) and (b) and filter the signal from noise. The impulsevelocities causing the disk to slightly graze the annular guide, are determined by taking the average of the velocities just
before and shortly after impacts in the two lateral directions and calculating the radial velocity, _r ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi_y2þ _z2
q. The velocities
are determined to, _r ¼ 12 mm=s, _y ¼ 1 mm=s and _z ¼ 12 mm=s, respectively.Fig. 11 depicts the results obtained experimentally for the case of dry surfaces. The impulse velocity exerted on the disk
is increased in magnitude. The experiment conducted here clearly demonstrates the phenomenon where the impactcondition is superposed to the rub, where the rotor spin energy is fully transformed into rotor lateral motion. Usingthe non-ideal drive given by the AC motor, the rotor angular velocity under the rubbing conditions is stopped and all

Fig. 9. Experiment: (a) time series y-motion, (b) time series z-motion, (c) trajectories of the center of the disk within the bearing clearance, (d) angular
velocity of the disk.
Fig. 10. Experiment: (a) velocity of the disk in the y-direction, (b) velocity of the disk in the z-direction.
S. Lahriri et al. / Journal of Sound and Vibration 331 (2012) 4518–45364528
the rotational energy is transformed in a kind of ‘‘self-excited’’ rotor lateral vibration with repeated impacts against theannular guide. For this state, the disk undergoes a backward whip state independent on the angular velocity. Furthermore,by considering Fig. 11(d) it can be observed that the angular velocity of the disk rapidly increases as the disk shortlyescapes the annular guide before it collides with it again causing the angular velocity to decrease rapidly. Hereupon, thedisk undergoes the backward whip state again. Fig. 12 depicts the velocity of the disk for the impact motion depicted inFig. 11. The radial impulse velocity exerted on the disk is estimated with the same approach mentioned above anddetermined to be _r ¼ 120 mm=s, _y ¼ 90 mm=s and _z ¼ 80 mm=s, respectively. Furthermore the restitution coefficient e isdetermined by estimating the ratio, e¼ vout=vin, between the average impact velocities and the velocities shortly afterimpact, from the velocity plots in Fig. 12. The average impact velocity is determined to vin ¼ 70 mm=s and the averagevelocity after is determined to vout ¼ 60 mm=s. This gives a restitution coefficient to e¼0.85.
The experimental study demonstrates that the dry friction contact force plays a significant role by transferring therotational whirling motion of the disk to lateral excitation conveying the disk in a backward whip state. There are two

Fig. 11. Experiment: (a) time series y-motion, (b) time series z-motion, (c) trajectories of the center of the disk within the bearing clearance, (d) angular
velocity of the disk.
Fig. 12. Experiment: (a) velocity of the disk in the y-direction, (b) velocity of the disk in the z-direction.
Fig. 13. Experiment: (a) time series y-motion, (b) time series z-motion, (c) trajectories of the center of the disk within the bearing clearance, (d) angular
velocity of the disk.
S. Lahriri et al. / Journal of Sound and Vibration 331 (2012) 4518–4536 4529
conditions of the surface coating influencing the kinetic friction coefficient, one for dry condition and one for lubricatedcondition. In order to facilitate the disk to maintain a constant velocity and mitigate the repeated impacts against thestator ring, backward whip state, the inner surface of the annular guide is lubricated with greasing. Fig. 13 depicts the

S. Lahriri et al. / Journal of Sound and Vibration 331 (2012) 4518–45364530
results obtained experimentally for the case of lubricated surface. A sudden impulse is exerted on the disk with themagnitude of approximately _r ¼ 64 mm=s, the restitution coefficient is estimated to e¼0.78. After impact between the diskand the stator ring, a full annular contact state, forward whirling, is developed as shown in Fig. 13(c). The angular velocityis slightly decreased and the motion of the disk is traversing the full extent of the annular guide clearance. In fact, the orbitis slightly reduced due to the mixed lubrication regime. For this setup, the repeating impact phenomenon, backward whip,is prevented due to the decrease in friction.
4.3.2. Numerical study
The findings from the experiments involving the damping factor, the restitution coefficients and the impulse velocities,exerted in the two lateral directions on the disk, causing it to impact the annular guide are employed in this numericalstudy. These velocities are computed as initial conditions given to the center of the disk. Fig. 14 depicts the motion of thedisk as it grazes the surface of the annular guide. Once the disk slightly grazes the annular ring, it is attracted to the stablelimit cycle at the center of the annular guide.
The following study is based on dry surface condition. The reference value for the kinetic dry friction coefficient for thesurface condition of steel sliding against steel is given approximately to mk ¼ 0:5670:01. Fig. 15 depicts the motion of thecenter of the disk. The impact energy is causing the angular velocity to drop to zero as the disk impacts the annular guide.The friction force exerted on the disk acts opposite the driving torque given by the AC motor and reduces the angularvelocity at each impact. The impacts act rapidly and overcome the capability of the AC motor to maintain a constantvelocity. Shortly after the collision with the guide, a full annular backward rub state is developed leading to a divergingstate. The integration is therefore terminated. This diverging backward precession state is also depicted in the work ofYanabe et al. [9]. In the following, the surface of the annular guide is considered well lubricated in order to improve thebehavior of the impact motion and keep the angular velocity of the disk constant by decreasing the magnitude of thefriction contact force. The reference value for the kinetic friction coefficient for the well lubricated surface condition ofsteel sliding against steel is given approximately to mk ¼ 0:0870:01. It is important to highlight, that the purpose of thisstudy is solely to study the behavior of the disk motion due to the decrease in contact friction. Therefore, the fluid pressureforces such as derived in the work of Lund and Thomsen [28], Santos [29,30] and Santos et al. [31,32] are not considered inthis study once the lubrication regime is not hydrodynamic, but probably boundary or mixed. Fig. 16 depicts the motion ofthe center of the disk. The disk impacts the annular guide before it settles to a full annular whirling state. The angularvelocity is also slightly decreased as depicted in the experimental study in Fig. 13(d).
Qualitatively, the numerical findings are in good agreement with the experimental results. The analyses demonstratethe phenomenon for the dry surface case where the rotating kinetic energy of the rotor is dissipated quickly throughfriction, and the angular velocity decreases extensively as a result of this. The disk undergoes a backward whip stateindependent on the angular velocity. However, as the surface is lubricated the analyses demonstrate that the diskundergoes a full annular whirling state. For this case, the angular velocity is not extensively affected. Yet, the disk traversethe full extent of the clearance and never escaping this state. This study demonstrates that the disk should be forced to thecenter after impacts so it escapes the full annular contact state and the disk motion should be mitigated.
Fig. 14. Numerical: (a) time series y-motion, (b) time series z-motion, (c) trajectories of the center of the disk within the bearing clearance, (d) angular
velocity of the disk.

Fig. 16. Numerical: (a) time series y-motion, (b) time series z-motion, (c) trajectories of the center of the disk within the bearing clearance, (d) angular
velocity of the disk.
Fig. 15. Numerical: (a) time series y-motion, (b) time series z-motion, (c) trajectories of the center of the disk within the bearing clearance, (d) angular
velocity of the disk.
S. Lahriri et al. / Journal of Sound and Vibration 331 (2012) 4518–4536 4531
5. Unconventional disk-pin contact design, x¼ 20 Hz
5.1. Experimental study
In the first test setup, the pins are not employed and the backup bearing acts as a traditional annular guide. The surfaceof the ring is kept dry. Fig. 17 depicts the results obtained experimentally using this new design. The disk is exerted withan impulse causing it to impact the ring. During this impact event the disk spin energy is transformed into lateral motionwhere the disk undergoes a backward whip motion independent on the angular velocity. This particular motion depictedin Fig. 17(c) is caused by the increase in clearance compared to the impact motion depicted in Fig. 11(c). In the secondexperiment the pins are employed and the clearance is customized by adjusting the length of the pins. Like the previousexperiments the disk is exerted with impulses. It is clearly demonstrated in Fig. 18 that this approach has a favorable effecton the impact behavior. The pins are forcing the disk to the center of the backup bearing and thereby preventing the disk toundergo a full annular contact state and the motion is mitigated. Furthermore, the angular velocity is kept constant andonly slightly affected as the disk contacts the pins due to the impulses exerted on the disk. The impulse velocity exerted on

0 50 100−2
−1
0
1
time [s]
y [m
m]
0 50 100−1
0
1
2
time [s]
z [m
m]
−1 0 1
−0.5
0
0.5
1
y (t) [mm]
z (t
) [m
m]
0 50 1000
10
20
30
time [s]
ω [
Hz]
Fig. 17. Experiment: (a) time series y-motion, (b) time series z-motion, (c) trajectories of the center of the disk within the bearing clearance, (d) angular
velocity of the disk.
Fig. 18. Experiment: (a) time series y-motion, (b) time series z-motion, (c) trajectories of the center of the disk within the bearing clearance, (d) angular
velocity of the disk, Rd=r0 ¼ 833.
S. Lahriri et al. / Journal of Sound and Vibration 331 (2012) 4518–45364532
the disk is determined with the same procedure as mentioned in the previous sections. The radial velocity is determinedto, _r ¼ 42 mm=s, _y ¼ 24 mm=s and _z ¼ 35 mm=s, respectively. The restitution coefficient e is determined to e¼ 17
20¼ 0:85.
5.1.1. Numerical study
A numerical study has been conducted in order to investigate the behavior of the dynamics of the disk by using thisnew design. The impulse velocities determined by experiments are employed in the analysis and computed as initialconditions. This new bearing design induces that the friction coefficient can be reduced. Fig. 19 depicts the dynamics of the

Fig. 19. Numerical: (a) time series y-motion, (b) time series z-motion, (c) trajectories of the center of the disk within the bearing clearance, (d) angular
velocity of the disk.
Fig. 20. (a) Comparison between experiments and numerical simulation for mk ¼ 0:5670:01, annular guide, (b) comparison between experiments and numerical
simulation for mk ¼ 0:0870:01, annular guide, (c) comparison between experiments and numerical simulation for unconventional disk-pin contact design.
S. Lahriri et al. / Journal of Sound and Vibration 331 (2012) 4518–4536 4533
disk. In order to facilitate the numerical study, the four pins are positioned as depicted in Fig. 19(c). Due to the pins, thedisk undergoes an impact motion within the imitated square where it impacts the pins. The disk motion is reduced and theangular velocity is kept constant. Hence, the full annular contact condition is prevented.

S. Lahriri et al. / Journal of Sound and Vibration 331 (2012) 4518–45364534
6. Conclusion
The rotor motion due to collision with an conventional and unconventional annular guide has been studiedexperimentally as well as numerically. The analyses for the conventional annular guide have been conducted both forthe cases of dry and lubricated inner surface of the annular guide. Using a non-ideal drive it has been shown that the rotorspin stops under rubbing conditions for the dry surface case, and all the rotational energy is transformed in a kind of self-excited rotor lateral vibration with repeated impacts against the annular guide housing, backward whip state. In thelubricated case, the analyses showed that the rotor undergoes a full annular contact state, never escaping this full annularwhirling motion. The theoretical model demonstrated that the rotor should be forced to the center of the annular guide atimpacts. Thereby, escapes from the full annular contact state and gets attracted to the stable limit cycle acting in the centerof the guide, as it also happens experimentally.
The new unconventional backup bearing design was realized and it is able to reduce the lateral motion of the rotor andkeep a constant angular spin. In this way, the rotor is forced to the center of the annular guide and the lateral motion ismitigated. The four pins are adjustable, which allows the clearance to be customized. A summary of the dynamic behaviorof the rotor under different impact conditions is depicted in Fig. 20. Qualitatively, the numerical findings are in goodagreement with the experimental results.
Acknowledgments
The authors would like to express great gratitude to Pontifıcia Universidade Catolica, PUC-Rio de Janeiro, Department ofMechanical Engineering, for hosting and conducting the experimental setup.
Appendix A
A.1. Equation of motion
The absolute angular velocity
B1TI ¼
cos G sin G 0
�sin G cos G 0
0 0 1
264
375, B2
TB1¼
cos b 0 �sin b0 1 0
sin b 0 cos b
264
375, B3
TB2¼
1 0 0
0 cos f sin f0 �sin f cos f
264
375 (23)
The angular velocities of the reference frames are written as:
I_C ¼
0
0_G
8><>:
9>=>;, _
B1b ¼
0_b0
8><>:
9>=>;, B2
_/ ¼
_f0
0
8><>:
9>=>; (24)
The absolute angular velocity x is described with help from the moving frame B3 which is attached to the cross section ofthe disk, one has
B3x ¼ B3
TB2� B2
TB1� B1
TI � I_CþB3
TB2� B2
TB1� _B1
bþB3TB2� B2
_/ (25)
Solving (25), one gets
B3x ¼
oa
ob
oc
8><>:
9>=>;¼ _G
�sin bsin f cos bcos f cos b
8><>:
9>=>;þ _b
0
cos f�sin f
8><>:
9>=>;þ _f
1
0
0
8><>:
9>=>; (26)
The kinetic energy of the disk:
Ekin ¼12MD _y
2�MD _ye cos j0 sin G _G cos f�MD _ye cos j0 cos G sin f _f
þMD _ye sin j0 sin G _G sin f�MD _ye sin j0 cos G cos f _f
þMD _ye cos j0 cos G _G sin b sin fþMD _ye cos j0 sin G cos b _b sin f
þMD _ye cos j0 sin G sin b cos f _fþMD _ye sin j0 cos G _G sin b cos f
þMD _ye sin j0 sin G cos b _b cos f�MD _ye sin j0 sin G sin b sin f _f
þ12MD _z
2�MD _ze cos j0 sin b _b sin fþMD _ze cos j0 cos b cos f _f
�MD _ze sin j0 sin b _b cos f�MD _ze sin j0 cos b sin f _f
þ12 Ip
_G2
sin b2þ1
2 Ip_f
2�Ip
_G _f sin bþ12 ID
_G2
cos b2þ1
2ID_b
2(27)

S. Lahriri et al. / Journal of Sound and Vibration 331 (2012) 4518–4536 4535
The equations of motions are written as; considering the motion in q1 ¼ y;
MD €y�MDe cos j0 sin G cos f €GþMDe sin j0 sin G sin f €G
þMDe cos j0 cos G sin b sin f €GþMDe sin j0 cos G sin b cos f €G�MDe cos j0 cos G sin f €f
�MDe sin j0 cos G cos f €fþMDe cos j0 sin G sin b cos f €f�MDe sin j0 sin G sin b sin f €f
þMDe cos j0 sin G cos b sin f €bþMDe sin j0 sin G cos b cos f €b�MDe cos j0 cos G cos f _G2
þMDe sin j0 cos G sin f _G2�MDe cos j0 sin G sin b sin f _G
2�MDe sin j0 sin G sin b cos f _G
2
�MDe cos j0 cos G cos f _f2þMDe sin j0 cos G sin f _f
2�MDe cos j0 sin G sin b sin f _f
2
�MDe sin j0 sin G sin b cos f _f2�MDe cos j0 sin G sin b sin f _b
2�MDe sin j0 sin G sin b cos f _b
2
þ2MDe cos j0 sin G sin f _G _fþ2MDe sin j0 sin G cos f _G _fþ2MDe cos j0 cos G cos b sin f _G _b
þ2MDe cos j0 cos G sin b cos f _G _fþ2MDe cos j0 sin G cos b cos f _b _fþ2MDe sin j0 cos G cos b cos f _G _b
�2MDe sin j0 cos G sin b sin f _G _f�2MDe sin j0 sin G cos b sin f _f _b (28)
considering the motion in q2 ¼ z;
MD €z�MDe cos j0 sin b sin f €b�MDe sin j0 sin b cos f €b
þMDe cos j0 cos b cos f €f�MDe sin j0 cos b sin f €f�MDe cos j0 cos b sin f _b2
�MDe sin j0 cos b cos f _f2�MDe sin j0 cos b cos f _b
2�MDe cos j0 cos b sin f _f
2
�2MDe cos j0 sin b cos f _b _fþ2MDe sin j0 sin b sin f _b _f (29)
considering the motion in q3 ¼ b;
ID€b�MD €ze cos j0 sin b sin f�MD _ze cos j0 cos b sin f _b
�MD _ze cos j0 sin b cos f _f�MD €ze sin j0 sin b cos f�MD _ze sin j0 cos b cos f _b
þMD _ze sin j0 sin b sin f _fþMD €ye cos j0 sin G cos b sin fþMD _ye cos j0 cos G cos b sin f _G
�MD _ye cos j0 sin G sin b sin f _bþMD _ye cos j0 sin G cos b cos f _fþMD €ye sin j0 sin G cos b cos f
þMD _ye sin j0 cos G cos b cos f _G�MD _ye sin j0 sin G sin b cos f _b�MD _ye sin j0 sin G cos b sin f _f
�½�MD _ze cos j0 cos b sin f _b�MD _ze cos j0 sin b cos f _f�MD _ze sin j0 cos b cos f _b
þMD _ze sin j0 sin b sin f _fþMD _ye cos j0 cos G cos b sin f _G�MD _ye cos j0 sin G sin b sin f _b
þMD _ye cos j0 sin G cos b cos f _fþMD _ye sin j0 cos G cos b cos f _G�MD _ye sin j0 sin G sin b cos f _b
�MD _ye sin j0 sin G cos b sin f _fþ Ip_G
2cos b sin b�Ip
_G _f cos b�ID_G
2cos b sin b� (30)
considering the motion in q4 ¼G:
Ip€G sin b2
þ2Ip_G sin b cos b _b�Ip
€f sin b�Ip_f cos b _bþ ID
€G cos b2�2ID
_G sin b cos b _b
þMD €ye cos j0 sin G cos f�MD _ye cos j0 cos G cos f _GþMD _ye cos j0 sin G sin f _f
þMD €ye sin j0 sin G sin fþMD _ye sin j0 cos G sin f _GþMD _ye sin j0 sin G cos f _f
þMD €ye cos j0 cos G sin b sin f�MD _ye cos j0 sin G sin b sin f _GþMD _ye cos j0 cos G cos b sin f _b
þMD _ye cos j0 cos G sin b cos f _fþMD €ye sin j0 cos G sin b cos f�MD _ye sin j0 sin G sin b cos f _G
þMD _ye sin j0 cos G cos b cos f _b�MD _ye sin j0 cos G sin b sin f _f
�½�MD _ye cos j0 cos G cos f _GþMD _ye cos j0 sin G sin f _fþMD _ye sin j0 cos G sin f _G
þMD _ye sin j0 sin G cos f _f�MD _ye cos j0 sin G sin b sin f _GþMD _ye cos j0 cos G cos b sin f _b
þMD _ye cos j0 cos G sin b cos f _f�MD _ye sin j0 sin G sin b cos f _G
þMD _ye sin j0 cos G cos b cos f _b�MD _ye sin j0 cos G sin b sin f _f� (31)
considering the motion in q5 ¼f:
Ip€f�Ip
€G sin b�Ip_G cos b _b
�MD €ye cos j0 cos G sin fþMD _ye cos j0 sin G sin f _G�MD _ye cos j0 cos G cos f _f
�MD €ye sin j0 cos G cos fþMD _ye sin j0 sin G cos f _GþMD _ye sin j0 cos G sin f _f
þMD €ze cos j0 cos b cos f�MD _ze cos j0 sin b cos f _b�MD _ze cos j0 cos b sin f _f
�MD €ze sin j0 cos b sin fþMD _ze sin j0 sin b sin f _b�MD _ze sin j0 cos b cos f _f
þMD €ye cos j0 sin G sin b cos fþMD _ye cos j0 cos G sin b cos f _GþMD _ye cos j0 sin G cos b cos f _b
�MD _ye cos j0 sin G sin b sin f _f�MD €ye sin j0 sin G sin b sin f�MD _ye sin j0 cos G sin b sin f _G
�MD _ye sin j0 sin G cos b sin f _b�MD _ye sin j0 sin G sin b cos f _f

S. Lahriri et al. / Journal of Sound and Vibration 331 (2012) 4518–45364536
�½MD _ye cos j0 sin G sin f _G�MD _ye cos j0 cos G cos f _fþMD _ye sin j0 sin G cos f _G
þMD _ye sin j0 cos G sin f _f�MD _ze cos j0 sin b cos f _b�MD _ze cos j0 cos b sin f _f
þMD _ze sin j0 sin b sin f _b�MD _ze sin j0 cos b cos f _fþMD _ye cos j0 cos G sin b cos f _G
þMD _ye cos j0 sin G cos b cos f _b�MD _ye cos j0 sin G sin b sin f _f�MD _ye sin j0 cos G sin b sin f _G
�MD _ye sin j0 sin G cos b sin f _b�MD _ye sin j0 sin G sin b cos f _f� (32)
References
[1] W.M. Szcygielski. Dynamisches Verhalten eines schnell drehenden Rotors bei Anstreifvorgangen, Ph.D. Thesis. Diss. ETH Nr. 8094. ADAGAdministration und Druck AG Juli 1986 Zurich.
[2] A. Muszynska, Rotor-to-stationary element rub-related vibration phenomena in rotating machinery, literature survey, The Shock and Vibration Digest21 (3) (1989) 3–11.
[3] R.F. Beatty, Differentiating rotor response due to radial rubbing, Journal of Vibration, Acoustics, Stress, and Reliability in Design 107 (1985) 151–160.[4] F. Ehrich, Observations of subcritical, superharmonic and chaotic response in rotordynamics, Journal of Vibration and Acoustics 114 (January) (1992)
93–114.[5] G.X. Li, M.P. Paıdoussis, Impact phenomena of rotor-casing dynamical systems, Nonlinear Dynamics 5 (1994) 53–70.[6] J.L. Isakson, On the Dynamics of a Rotor Interacting with Non-rotating Parts, Ph.D. Thesis. Linoping Studies in Science and Technology, Thesis No 426,
1994.[7] H.C. Piccoli, H.I. Weber, Experimental observation of chaotic motion in a rotor with rubbing, Nonlinear Dynamics 16 (1998) 55–70.[8] T. Inoue, Y. Ishida, G. Fei, H.Md. Zahid, Suppression of the forward rub in rotating machinery by an asymmetrically supported guide, Journal of
Vibration and Acoustics 133 (April) (1992).[9] S. Yanabe, S. Kaneko, Y. Kanemitsu, N. Tomi, K. Sugiyama, Rotor vibration due to collision with annular guard during passage through critical speed,
Journal of Vibration and Acoustics 120 (April) (1998) 544–550.[11] F.J.C. Alamo, Dinamica de um Rotor Vertical em Balanco com Impacto. Dissertacao De Mestrado, Departmento De Engenharia Mecanica, March 2003,
Rio de Janeiro.[12] S.H. Crandall, N.C. Dahl, T.J. Lardner, An Introduction to the Mechanics of Solids, McGraw Hill, 1978.[13] J.C. PiedbŒuf, J. De Carufel, R. Hurteau, Friction and stick–slip in robots: simulation and experiments, Multibody System Dynamics 4 (2000) 341–354.[14] A.R. Bartha, Dry Friction Backward Whirl of Rotors. Dissertation ETH No. 13817, ETH Zurich, 2000.[15] G. Gilardi, I.I. Sharf, Literature survey of contact dynamics modelling, Mechanism and Machine Theory 37 (2002) 1213–1239.[16] H. Hertz. On the contact of solids – on the contact of rigid elastic solids and on hardness (Translated by D.E. Jones and G.A. Schott), Miscellaneous Papers,
Macmillan and Co. Ltd., London, UK, 1896, pp. 146–183.[17] K.H. Hunt, F.R. Crossley, Coefficient of restitution interpreted as damping in vibroimpact, Journal of Applied Mechanics 7 (1975) 440–445.[18] H.M. Lankarani, P.E. Nikravesh, A contact force model with hysteresis damping for impact analysis of multi-body systems, Journal of Mechanical
Design 112 (1990) 369–376.[19] P. Flores, J. Ambrosio, J.C.P. Claro, H.M. Lankarani, Influence of the contact impact force model on the dynamic response of multi-body systems,
Journal of Multi-body Dynamics 220 (2006) 21–34. (IMechE Part K).[20] P. Flores, J. Ambrosio, J.C.P. Claro, Dynamic analysis for planar multibody mechanical systems with lubricated joints, Multibody System Dynamics 12
(2004) 47–74.[21] P. Flores, J. Ambrosio, J.C.P. Claro, H.M. Lankarani, C.S. Koshy, A study on dynamics of mechanical systems including joints with clearance and
lubrication, Mechanism and Machine Theory 41 (2006) 247–261.[22] P. Flores, Numerical and experimental investigation on multibody systems with revolute clearance joints, Mechanism and Machine Theory 44 (2008)
1211–1222.[23] P. Flores, C.S. Koshy, H.M. Lankarani, J. Ambrosio, J.C.P. Claro, Numerical and experimental investigation on multibody systems with revolute
clearance joints, Nonlinear Dynamics 65 (2011) 383–398.[24] H. Ziegler, Die stabilittskriterien der Elastomechanik, Ingenieur – Archiv 20 (1952) 49–56.[25] R. Gasch, Vibration of large turbo-rotors in fluid-film bearings on an elastic foundation, Journal of Sound and Vibration 47 (1) (1976) 53–73.[26] Y. Sugiyama, M.A. Langthjem, Physical mechanism of the destabilizing effect of damping in continuous non-conservative dissipative systems,
International Journal of Non-Linear Mechanics 42 (2007) 132–145.[27] A. Mukherjee, V. Rastogi, A. Dasgupta, Extension of Lagrangian–Hamiltonian mechanics for continuous systems investigation of dynamics of a one-
dimensional internally damped rotor driven through a dissipative coupling, Nonlinear Dynamics 58 (1–2) (2009) 107–127.[28] J.W. Lund, K.K. Thomsen, A calculation method and data for the dynamic coefficients of oil-lubricated journal bearings, Topics in Fluid Film Bearing
and Rotor Bearing System Design and Optimization, ASME, 1978, pp. 1–28.[29] I.F. Santos, Design and evaluation of two types of active tilting-pad journal bearings, IUTAM Symposium on Active Control of Vibration, Vol. 55, 1994,
pp. 583–594.[30] I.F. Santos, On the adjusting of the dynamic coefficients of tilting-pad journal bearings, STLE Tribology Transactions 38 (3) (1995) 700–706.[31] I.F. Santos, R. Nicoletti, Influence of orifice distribution on the thermal and static properties of hybridly lubricated bearings, International Journal of
Solids and Structures 38 (10–13) (2001) 2069–2081.[32] I.F. Santos, F.Y. Watanabe, Compensation of cross-coupling stiffness and increase of direct damping in multirecess journal bearings using active
hybrid lubrication – Part I: theory, ASME Transactions, Journal of Tribology 126 (1) (2004) 146–155.