Robustness as a non-localizable relational phenomenon
50
Robustness as a non-localizable relational phenomenon Jose A. Fernandez-Leon *,† Centre for Computational Neuroscience and Robotics, University of Sussex, Brighton BN1 9QG, UK * E-mail: [email protected]; [email protected]; Tel.: +44 (0)1273 872948; Fax: +44 (0)1273 678535. † Present address: Department of Neurobiology and Anatomy, University of Texas– Houston Medical School, Houston, TX 77030, USA. ABSTRACT A current challenge in neuroscience, systems and theoretical biology is to understand what properties allow organisms to exhibit and sustain behaviours despite perturbations (behavioural robustness). Indeed, there are still significant theoretical difficulties in this endeavour due to the context-dependent nature of the problem. Contrary to the common view of biological robustness as a phenomenon that emerges internally, this article discusses the hypothesis that behavioural robustness is rooted in dynamical processes that distribute between internal controls, the organism body and the environment. This review highlights the varied perspectives and how they have led to the current focus on robustness as a relational phenomenon. A new perspective is proposed in which robustness is better understood in the context of agent-environment dynamical couplings, in which such couplings are not always the full determinants of robustness. The challenges and limitations of the proposed approach are identified.
-
Upload
hms-harvard -
Category
Documents
-
view
2 -
download
0
Transcript of Robustness as a non-localizable relational phenomenon

Robustness as a non-localizable relational phenomenon
Jose A. Fernandez-Leon*,†
Centre for Computational Neuroscience and Robotics, University of Sussex, Brighton BN1 9QG, UK
*E-mail: [email protected]; [email protected]; Tel.: +44 (0)1273 872948; Fax: +44 (0)1273 678535.
†Present address: Department of Neurobiology and Anatomy, University of Texas–Houston Medical School, Houston, TX 77030, USA.
ABSTRACT
A current challenge in neuroscience, systems and theoretical biology is to understand
what properties allow organisms to exhibit and sustain behaviours despite perturbations
(behavioural robustness). Indeed, there are still significant theoretical difficulties in this
endeavour due to the context-dependent nature of the problem. Contrary to the common
view of biological robustness as a phenomenon that emerges internally, this article
discusses the hypothesis that behavioural robustness is rooted in dynamical processes that
distribute between internal controls, the organism body and the environment. This review
highlights the varied perspectives and how they have led to the current focus on
robustness as a relational phenomenon. A new perspective is proposed in which
robustness is better understood in the context of agent-environment dynamical couplings,
in which such couplings are not always the full determinants of robustness. The
challenges and limitations of the proposed approach are identified.

Key words: biological robustness, adaptive behaviour, minimal cognition, theoretical
biology, dynamical systems, bioinspiration.
CONTENTS
I. INTRODUCTION ................................................................................................................................... 2
II. A HISTORICAL CONTEXT FOR SYSTEMIC ROBUSTNESS ...................................................... 3
III. ROBUSTNESS THROUGH DYNAMICALLY DISTRIBUTED MECHANISMS ...................... 16
IV. LIFETIME ROBUSTNESS, YET EVOLUTIONARILY CONSTRAINED ................................... 21
V. DISCUSSION: ROBUSTNESS AS A RELATIONAL PHENOMENON ...................................... 24
VI. CONCLUSIONS ................................................................................................................................... 30
VIII. REFERENCES ........................................................................................................................................ 32
IX. APPENDIX: BASIC CONCEPTS FROM NON-LINEAR DYNAMICAL SYSTEMS THEORY .. 36
I. INTRODUCTION
Organisms’ surroundings play an important role in shaping their actions; behaviour is by
no means solely defined internally. The responses to particular situations in the
environment such as the presence of poisoned food where an organism cannot sense the
risk involved in eating it cannot be explained only in terms of the stimuli involved or
based on the organism’s internal structure. Furthermore, the same living being may
behave in completely different ways when presented with seemingly identical stimuli at
two different moments or places (Beer, 2004). In one case, the food may be consumed,
while in a different moment the organism may avoid the food because it has learnt the risk
involved (Beer & Chiel, 1990).
To account for these differences behavioural scientists usually assert that internal states
drive the changes in the organism’s response to its environment. Therefore, the
environment value is dependent on and regulated by the internal state of an organism

(further explained in Section II). However, this understanding of internal regulation
presents challenges on how to understand adaptive and persistent behaviours during an
organism’s lifetime. In this respect, when combined with environmental dynamics,
Maturana & Varela (Maturana & Varela, 1987) point out in that the ability of an organism
to draw these distinctions through its selective response to stimuli is a hallmark of
cognitive behaviour.
This review discusses the emergence of adaptive behaviours that outlast any initiating
stimulus arising from agent-environment interactions, and addresses current discussions
on behavioural robustness. The argument here is unique from other contributions in
theoretical biology and cognitive science in that it highlights a change in perspective on
robustness from being solely internally generated towards a relational phenomenon
involving agent–internal control, the body and the environment. Many of the pioneering
works in cybernetics suggest precisely this approach in a rich variety of ways, providing
a historical context for behavioural robustness research. The following discussions
outline how these studies have led to the current state-of-play in theoretical biology, and
draw conclusions on the relational domain of robustness.
II. A HISTORICAL CONTEXT FOR SYSTEMIC ROBUSTNESS
In 1932, while working at Bell Telephone Laboratories, Harry Nyquist provided the first
two measures of stability: gain and phase margins. In closed-loop control systems, phase
margin indicates relative stability − the tendency of a variable to oscillate during a
damped response to an input change (Healey, 1975). Damping is an effect that reduces the
amplitude of oscillations in an oscillatory system. Gain margin refers to absolute stability
and represents the degree to which a system will oscillate without limit given any

disturbance (Horowitz & Hill, 1989). Since that time, research on systemic resilience as
the ability to recover from or adjust to disturbances has been a topic of increasing interest
(Cogan, 2006).
Different, but connected, definitions of systems have appeared since that time in fields
like general systems theory (von Bertalanffy, 1968) and cybernetics (Ashby, 1956). For
example, von Bertalanffy (1968) proposed that a system is a set of interacting or
interdependent parts forming an integrated whole. Another definition (Ashby, 1960, p.16)
indicates that a system can be seen as “[...] any set of variables that [the observer or
experimenter] selects from those available on the real machine”. The latter description
identifies an important feature, emphasizing the role of the observer who selects the
variables, and whose intervention implies that any system is a mere abstraction.
Importantly, note that despite conceptual differences, systems in general share some
common characteristics: they have structure, that is, systems are defined by their
composition; they exhibit behaviour, which involves inputs, processing and outputs of
information; and systems have interconnectivity, where the various parts have
functional as well as structural relationships between each other (von Bertalanffy, 1968).
Here functional means systems (e.g. organisms, artificial agents, or robots) that are
capable of fulfilling a particular behaviour. ‘Structure’ refers to the components and
relations that constitute a particular unity and that makes its organization real (Maturana
& Varela, 1987).
These systemic characteristics also apply to living organisms. For example, von Uexküll
(1957) explained purposeful animal behaviour by joining an organism’s phenomenal
world (the interconnected information, and the world as perceived) and its effector world
[behaviour, and the world as enacted (De Jaegher & Di Paolo, 2013; Stewart, Gapenne &

Di Paolo, 2013)] into a single closed whole, the ‘Umwelt’ (Macinnes & Di Paolo, 2006).
Using his notion of Umwelt (or ‘self-centered world’ (Kull, 2010) , von Uexküll theorized
that organisms can have different internal environments or internal states, even though
they share the same environment. In his holistic view, von Uexküll (1957) proposed
multidisciplinary discussions in fields like muscular physiology, animal behaviour
studies, and the cybernetics of life. In his terms, the selection of sensory stimuli can be
seen as a process that can bring forth organisms’ own relevance in the surrounding world.
Importantly, this idea suggests that behavioural mechanisms can be thought as cognitively
distributed between internal control, body, and environment.
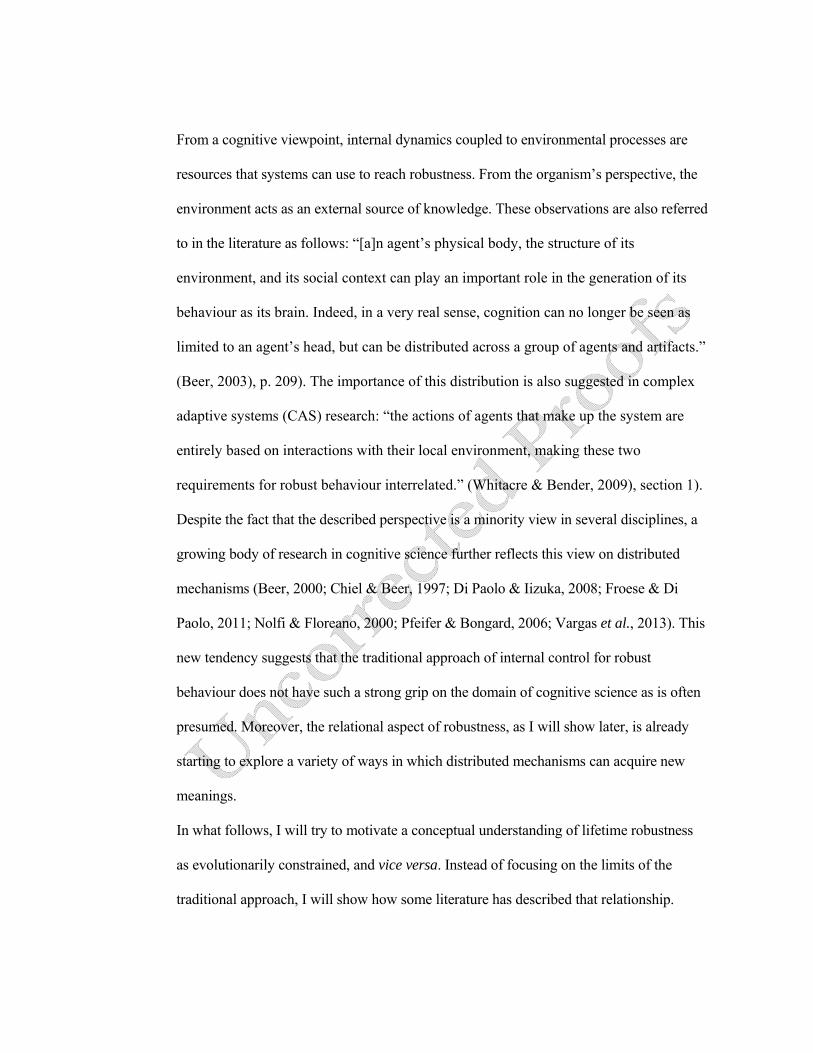
von Uexküll’s (von Uexküll, 1926; von Uexküll, 1957) description of functional circles
between the organism and the environment suggests that a ‘cue’ (or functional trigger) is
distributed along the functional circle of which the organism is a part (Fig. 1). In this
context, functional circles are abstract structures that tie together a subjective experience
or perception (termed a perceptual cue) and the effect that the perceptual cue has on the
behaviour of the organism (called an effector cue) (Macinnes & Di Paolo, 2006; von
Uexküll, 1926; von Uexküll, 1957). It is meaningless, therefore, to claim that a perceptual
cue resides in a particular location in the organism’s internal milieu. For example, the
ability to walk and the feedback that the nervous system receives during walking is not
localized at the neural level but is fully distributed throughout the organism and its
dynamics, where part of the control task is ‘outsourced’ to the physical dynamics of the
body (Pfeifer & Scheier, 2001).
This dominating motif in biological thinking was introduced earlier by the physiologist
Claude Bernard (Gross, 1998). He was the first to define the term ‘milieu intérieur’,
currently known as homeostasis. He summarized his idea as follows: “The fixity of the

milieu supposes a perfection of the organism such that the external variations are at each
instant compensated for and equilibrated [...] All of the vital mechanisms, however varied
they may be, have always one goal, to maintain the uniformity of the conditions of life in
the internal environment [...] The stability of the internal environment is the condition for
the free and independent life.” (Gross, 2009), p. 193)(Bernard, 1974). This understanding
implies that stability is a major organizing physiological principle in which the constancy
of the ‘internal environment’ must be maintained in the face of regulating this
environment in terms of temperature, acidity, ionic composition and so forth, in
multicellular organisms.
The concept of homeostasis, however, constrains our view of living systems in that the set
points are not themselves constant during homeostatic regulation, but change over time as
an open system (von Bertalanffy, 1968). In fact, the concept of homeostasis has recently
shifted to a richer concept, that of ‘homeodynamics’. This new concept sees dynamic
organization under homeostatic conditions that make possible the organized complexity
of life (Ikegami & Suzuki, 2008; Lloyd, Aon & Cortassa, 2001). Homeodynamics
conceptualizes the ability dynamically to self-organize behaviour where there is a loss of
stability. More specifically, homeodynamics as a concept emphasizes the stability of the
internal milieu towards perturbation. Since the second half of the 20th century, theories on
self-organization (Ashby, 1947; Ashby, 1962; Glansdorff & Prigogine, 1971) and
dynamic systems (Strogatz, 1994) have allowed us to approach the quantitative and
qualitative analysis of the organized complexity that characterizes homeodynamics
(Lloyd et al., 2001). For example, focusing on homeostatic regulation of sensorimotor
coupling in artificial life (AL) and complex systems, Ikegami & Suzuki (2008) reported a
mechanism that drives a homeostatic state to an autonomous self-moving state in

computational cell models. The mechanism is similar to with Ashby’s (1960)
ultrastability concept, where random parameter searching is activated when a system
breaks a viability constraint on a modelled internal variable in cellular organisms. This
random search changes the interconnectivity of the system (i.e. of the cellular organisms).
Further evidence that both self-organization and a rich complex initial state are required
for biological robustness is reported in (Hanczyc & Ikegami, 2009). The balancing act
between these two factors (self-organization and a rich complex initial state) is the
‘Maximalism Design Principle’ for biological robustness (Silverman & Ikegami, 2010).
This principle proposes that a biologically plausible minimal cell cannot be found using
traditional laboratory approaches and protocols and challenges today’s experimentalists to
design more complex initial states (Hanczyc & Ikegami, 2009).
The above examples of novel studies provide some insights into factors that contribute to
homodynamic regulation. While these examples illuminate some possibilities for
developing studies on homeodynamics, among other themes, how might such a
comprehensive approach assist our effort to study a common mechanism for adaptive
regulation? Ashby (1960) argued that all adaptive organisms have regulatory
mechanisms. He proposed a universal mechanism with an output to the environment and
at least two feedback loops (Fig. 2). A primary loop enables the organism to interact with
the environment via sensorimotor feedback, and a second loop that connects the
environment to the essential variables. These essential variables can consecutively affect
the organism’s sub-systems causing a change at the organism level. Fig. 2 shows the
sensorimotor loop represented by arrows to and from the sub-system R. Those parameters
(S) that affect R have an immediate effect on the subsystem’s behaviour, but not on the
environment. E represents the essential variables having an effect on S. Homeostatic
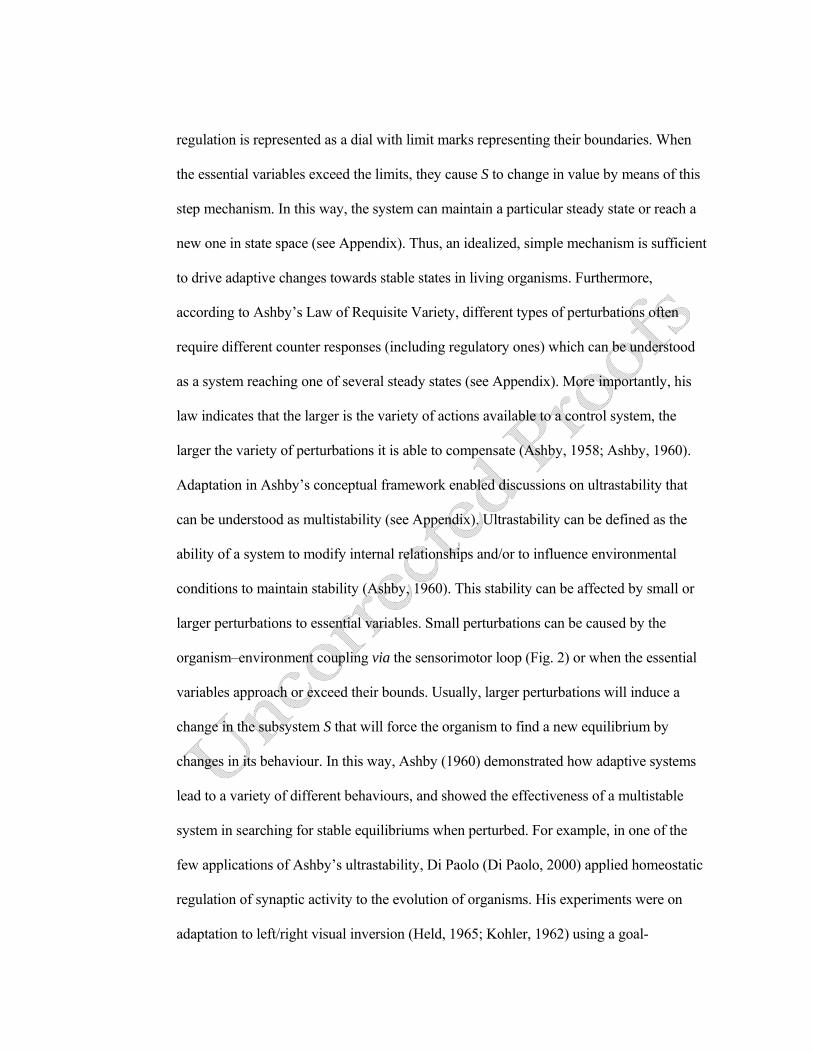
regulation is represented as a dial with limit marks representing their boundaries. When
the essential variables exceed the limits, they cause S to change in value by means of this
step mechanism. In this way, the system can maintain a particular steady state or reach a
new one in state space (see Appendix). Thus, an idealized, simple mechanism is sufficient
to drive adaptive changes towards stable states in living organisms. Furthermore,
according to Ashby’s Law of Requisite Variety, different types of perturbations often
require different counter responses (including regulatory ones) which can be understood
as a system reaching one of several steady states (see Appendix). More importantly, his
law indicates that the larger is the variety of actions available to a control system, the
larger the variety of perturbations it is able to compensate (Ashby, 1958; Ashby, 1960).
Adaptation in Ashby’s conceptual framework enabled discussions on ultrastability that
can be understood as multistability (see Appendix). Ultrastability can be defined as the
ability of a system to modify internal relationships and/or to influence environmental
conditions to maintain stability (Ashby, 1960). This stability can be affected by small or
larger perturbations to essential variables. Small perturbations can be caused by the
organism–environment coupling via the sensorimotor loop (Fig. 2) or when the essential
variables approach or exceed their bounds. Usually, larger perturbations will induce a
change in the subsystem S that will force the organism to find a new equilibrium by
changes in its behaviour. In this way, Ashby (1960) demonstrated how adaptive systems
lead to a variety of different behaviours, and showed the effectiveness of a multistable
system in searching for stable equilibriums when perturbed. For example, in one of the
few applications of Ashby’s ultrastability, Di Paolo (Di Paolo, 2000) applied homeostatic
regulation of synaptic activity to the evolution of organisms. His experiments were on
adaptation to left/right visual inversion (Held, 1965; Kohler, 1962) using a goal-

approaching robot controlled by the individual activity of artificial neurons as essential
variables. When sensors were inverted, the robot became unstable and started to change in
terms of its internal states. Eventually, the goal-approaching behaviour was regained (Di
Paolo, 2000). Even though the organisms were not designed specifically for this task, Di
Paolo (2000) showed that they could adapt to sensory inversion. Adaptation in Di Paolo’s
(2000) experiments emphasized the stability of the internal milieu towards perturbation,
but left open discussions on the mechanism that drives adaptation in more complex
models. Di Paolo (2000) further discussed how ultrastability leads to adaptation and its
link to behaviour.
von Neumann (von Neumann, 1956; von Neumann, 1966; von Neumann, 1987) earlier
noted the complexity of understanding how a system can resist changes to its initial
configuration by opening debates on the synthesis of reliable organisms from unreliable
components. Reliability here indicates the ability of artificial or biological organisms to
maintain their functionalities in normal (unperturbed) situations (e.g. walking behaviour
in non-uniform slope terrains) (Ashby, 1960; Stebbing, 2009). von Neumann’s notion of
one robot building another robot is known as the von Neumann’s kinematic model of
self-reproduction (von Neumann, 1966). His idea of a universal constructor, however, has
never been subject to physical implementation, because the fragility of the modelled
machines against unavoidable perturbations was drastic compared to more natural
kinematic settings (Friedman, 1996; Sayama, 1996)). These early ideas opened debates on
whether cybernetics can copy mechanisms observed in the biological realm to implement
them in artificial or robotic systems (Ashby, 1956; Ashby, 1960; Ashby, 1981).
The main difference between these types of systems is that in robots, designers impose
internal and external requirements that must be obeyed [e.g. the generation of moving-

home actions when the robots’ batteries are low (Nolfi & Floreano, 2000)]. Conversely,
biological organisms are guided mostly by what their metabolism dictates (Boden, 1999).
For instance, Cannon (Cannon, 1939) discussed his understanding of homeostasis by
using experiments from cybernetics describing self-regulating mechanisms that preserve
essential physiological variables (e.g. body temperature) in a state of dynamic balance.
More specifically, Cannon (1939) generalized Bernard’s concept introducing the term
homeostasis as the tendency of a self-regulated system to maintain its essential variables
close to some fixed point, like the temperature of a room controlled by a central heating
system and a thermostat. Note, however, that homeostasis only maintains a physiological
state and not necessarily full systemic functions (Kitano, 2004). Kitano’s perspective
suggests that the continuation of organism’s functions usually (but not exclusively)
implies an active and flexible internal control (see also (Ikegami & Suzuki, 2008;
Silverman & Ikegami, 2010).
The above examples indicate that usually the system under study is the organism, rather
than the interactions between internal control and environmental dynamics. Alternatively,
Beer (1997) proposes that focusing on the organism’s internal structure as a system does
not necessarily exclude the outside environment (Fig. 3). In fact, the internal structure of
an organism, its body and its environment can be a rich, complicated, highly structured,
coupled dynamical system, and behaviour can emerge from the adaptive interactions of
all three components as a system (Fig. 4) (Beer, 1997). However, such complexity implies
that the understanding of some phenomena such as behavioural robustness and
adaptability is a delicate task. For instance, it is relatively easy to produce artificial
organisms exhibiting particular behaviours, but identifying the associated processes in
living organisms is generally not trivial (Beer, 2000; Nolfi & Floreano, 2000; Silverman

& Ikegami, 2010). One difficulty arises in that the number of concurrent behavioural
processes in most biological organisms is higher than those in artificial systems.
The following discussions employ the definition of a system as an agent (organism or
robot) and its environment (agent–environment system) (Fig. 4C), using the term inner
system when necessary to refer to the agent’s internal features (Fig. 4A). In Fig. 4
different dynamical loops (grey circles) contribute to sustain behaviours despite internal
malfunctions and external perturbations. Fig. 4B represents the adaptive behaviour
approach which proposes that the nervous system (NS) is embedded within a body, which
in turn is embedded within the environment. Fig. 4C illustrates the case in which the
internal activity of an agent is dependent on and continuously perturbed by dynamical
cycles between internal control, body and environment, with no necessarily separable
inner mechanisms producing robustness (see also (von Bertalanffy, 1968), p. 106). In this
case adaptive behaviour emerges from the interactions of all three sub-parts (nervous
system, body, and environment), where the highly recursive and integrated activities of
these parts are in constant flux and open to body and environment dynamics (dashed lines
in Fig. 4C).
To understand better the complexity of the agent–environment problem, consider the case
of adaptability and structural stability. Adaptability here refers to the capacity of an
organism to regulate itself within the boundaries of its own internally defined properties
(Di Paolo, 2005), p. 429). In brief, the established theory of adaptive systems tells us that
biological organisms typically (but not exclusively) reorganize their components and in
doing so they remain functional and stable after perturbations (Ashby, 1940; Ashby,
1960). Adaptive capacity is commonly discussed in the context of the nervous system
co-developing with the body and the dynamics of the environment (Chiel & Beer, 1997;
Gallagher, 2005). Ashby (1960, p.58) gives a behavioural interpretation of this concept:
“behaviour is adaptive if it maintains the essential variables within physiological limits”
(see also (Umpleby, 2009). Note that adaptive capacity, however, does not always
produce better outcomes because it can lead to the exhaustion of adaptive resources,
malfunction of regulation, and loss of adaptive buffering provoking the activation of
extreme regulation (Di Paolo, 2005).
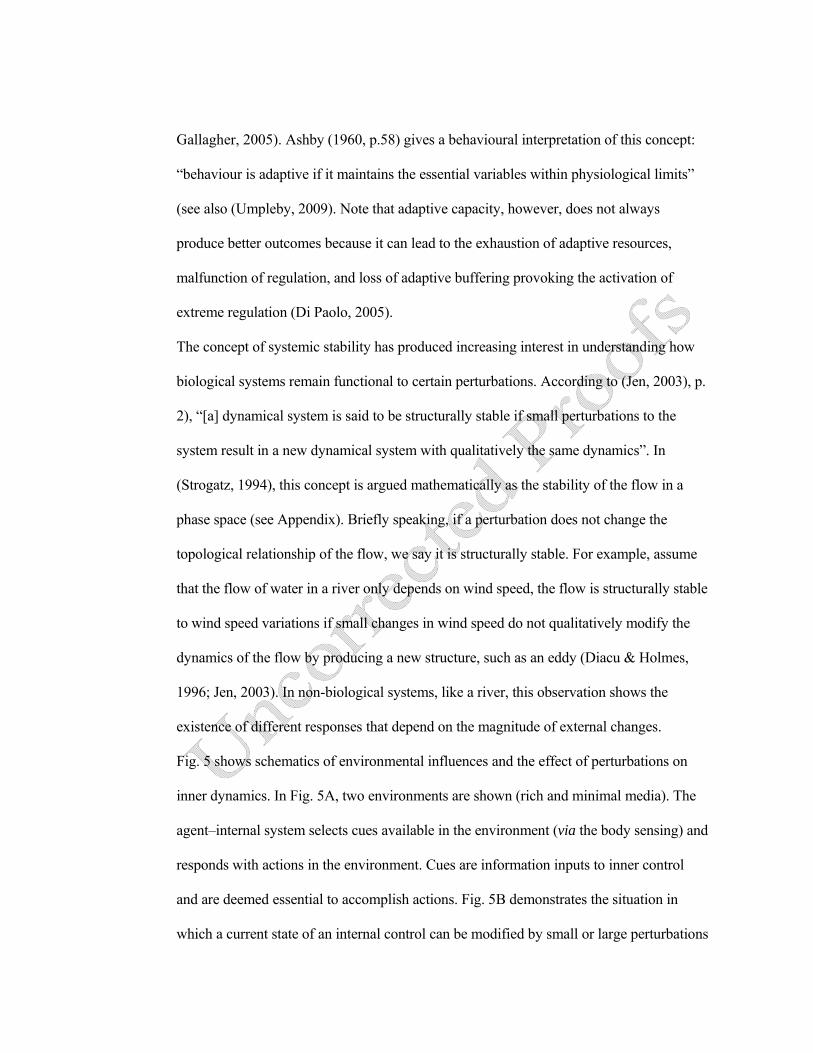
The concept of systemic stability has produced increasing interest in understanding how
biological systems remain functional to certain perturbations. According to (Jen, 2003), p.
2), “[a] dynamical system is said to be structurally stable if small perturbations to the
system result in a new dynamical system with qualitatively the same dynamics”. In
(Strogatz, 1994), this concept is argued mathematically as the stability of the flow in a
phase space (see Appendix). Briefly speaking, if a perturbation does not change the
topological relationship of the flow, we say it is structurally stable. For example, assume
that the flow of water in a river only depends on wind speed, the flow is structurally stable
to wind speed variations if small changes in wind speed do not qualitatively modify the
dynamics of the flow by producing a new structure, such as an eddy (Diacu & Holmes,
1996; Jen, 2003). In non-biological systems, like a river, this observation shows the
existence of different responses that depend on the magnitude of external changes.
Fig. 5 shows schematics of environmental influences and the effect of perturbations on
inner dynamics. In Fig. 5A, two environments are shown (rich and minimal media). The
agent–internal system selects cues available in the environment (via the body sensing) and
responds with actions in the environment. Cues are information inputs to inner control
and are deemed essential to accomplish actions. Fig. 5B demonstrates the situation in
which a current state of an internal control can be modified by small or large perturbations

pushing the agent–internal dynamics within the current boundary of attraction or far from
it (see Appendix). Perturbations may produce a dynamical return to the pre-perturbation
state, dynamical changes toward different steady states, or push current dynamics toward
an unstable region (from which the dynamics will eventually return if possible). In this
way, when an organism with such dynamics remains functional despite perturbations, the
changes of regions can be part of the robust response needed to reach stability.
Both concepts, adaptability and structural stability, intuitively indicate that three common
outcomes can arise from perturbations (Kitano, 2007), p. 137) (see also Appendix): (a)
the system cannot tolerate perturbations and it is no longer functional – it is not able to
sustain the original functionality; (b) the system compensates for effects of perturbations
and maintains a steady state – the system will continue in its current state; (c) the system
changes to another stable, functional configuration (Fig. 5B). An example of this is the
amoebic cyst process that is activated when the environment is potentially lethal. During
this process, an amoeba may pass from being mobile (b) to another state (c) where it
becomes dormant by forming a microbial cyst. The cell remains in this state until it
encounters more favourable environmental conditions (c) or eventually dies (a) (Leidy,
1878). The last outcome (c) commonly implies multi-stability at the systemic level to
radical changes in the face of perturbations (Ashby, 1960), p. 209; (Anderson, 2002). In
this context, once again, multi-stability refers to a systemic property that enables a system
to maintain its functions despite perturbation by reaching one of several (equally
functional) steady states.
These three outcomes suggest that robustness as a property of biological organisms does
not exclusively convey stability but also can entail adaptive controls. For instance,
imagine two organisms moving from A to B, two distant points in physical space, while a
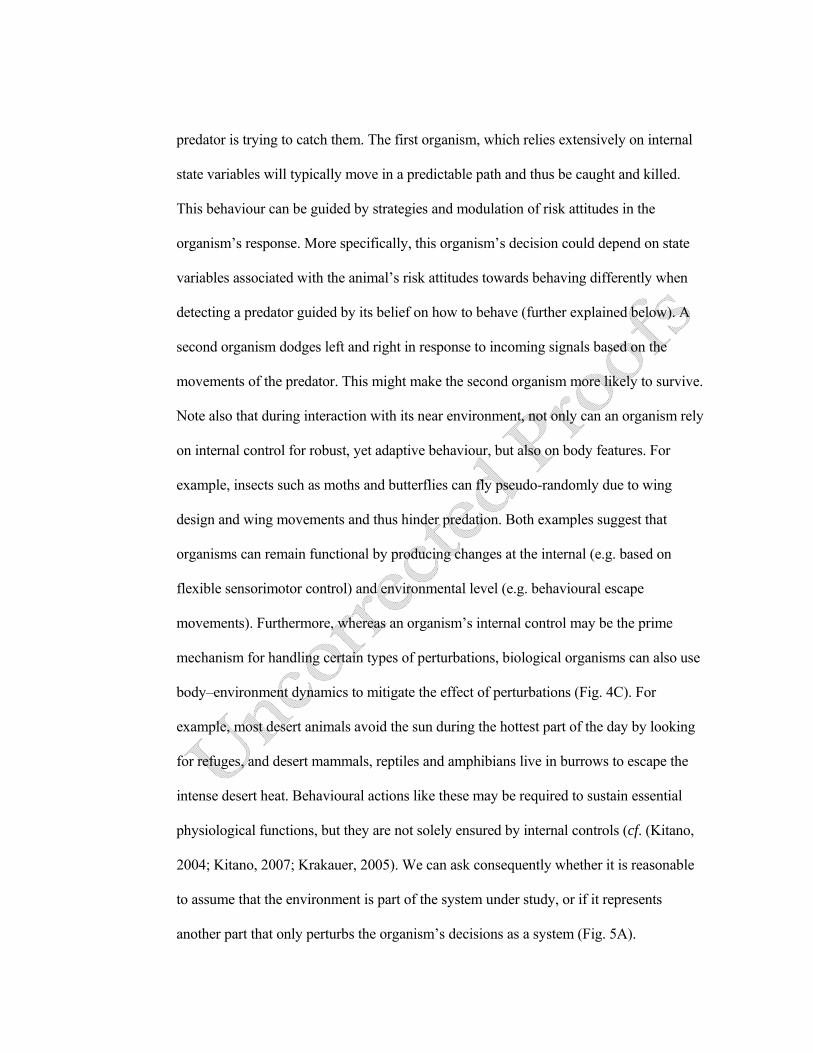
predator is trying to catch them. The first organism, which relies extensively on internal
state variables will typically move in a predictable path and thus be caught and killed.
This behaviour can be guided by strategies and modulation of risk attitudes in the
organism’s response. More specifically, this organism’s decision could depend on state
variables associated with the animal’s risk attitudes towards behaving differently when
detecting a predator guided by its belief on how to behave (further explained below). A
second organism dodges left and right in response to incoming signals based on the
movements of the predator. This might make the second organism more likely to survive.
Note also that during interaction with its near environment, not only can an organism rely
on internal control for robust, yet adaptive behaviour, but also on body features. For
example, insects such as moths and butterflies can fly pseudo-randomly due to wing
design and wing movements and thus hinder predation. Both examples suggest that
organisms can remain functional by producing changes at the internal (e.g. based on
flexible sensorimotor control) and environmental level (e.g. behavioural escape
movements). Furthermore, whereas an organism’s internal control may be the prime
mechanism for handling certain types of perturbations, biological organisms can also use
body–environment dynamics to mitigate the effect of perturbations (Fig. 4C). For
example, most desert animals avoid the sun during the hottest part of the day by looking
for refuges, and desert mammals, reptiles and amphibians live in burrows to escape the
intense desert heat. Behavioural actions like these may be required to sustain essential
physiological functions, but they are not solely ensured by internal controls (cf. (Kitano,
2004; Kitano, 2007; Krakauer, 2005). We can ask consequently whether it is reasonable
to assume that the environment is part of the system under study, or if it represents
another part that only perturbs the organism’s decisions as a system (Fig. 5A).

The above examples serve to illustrate the importance of complex interactions with the
environment, which can lead to the later development of robust and adaptive behaviours.
However, an organism avoiding its predator, or any risky situation, may be seen as an act
of robustness. This interpretation could create the illusion of pushing the robustness term
too far, to the point that it becomes useless. However, from a phenomenological
standpoint, biological systems from unicellular to whole organisms are robust if they
continue to function, survive or reproduce when faced with mutations, environmental
change and internal noise (Wagner, 2007). In particular, survival as the struggle to remain
living refers to the ability to perform a variety of behaviours aimed at survival: motility,
avoiding predators, and eating, among others. (Whitacre, 2012) notes that environmental
tracking by means of movements within the environment [e.g. chemotaxis (Alon et al.,
1999) and predator avoidance (Kondoh, 2007)] can alter the perturbations a system is
exposed to. Those alterations can improve the robustness of an organism and
alternatively, organisms and biological subsystems can offset the negative influence of
their surroundings. One example of this is the amoeba cyst process (Leidy, 1878)
discussed above. Other examples of behaviour supporting robustness can be found
throughout biology (Edelman, 1987). However, few studies discuss those strategies for
achieving behavioural robustness as a relational phenomenon between internal control
(e.g. homeostatic regulations) and behaviour (e.g. environmental tracking).
The next challenge is to scale up this discussion from internal control mechanisms to
distributed control. As I will now show, many published papers in theoretical systems
biology and cognitive sciences do support this in a rich variety of ways.

III. ROBUSTNESS THROUGH DYNAMICALLY DISTRIBUTED
MECHANISMS
In a series of recent papers, Kitano argued that the cooperative work of systemic
components, like nerves in the brain, is what enables the functional maintenance of a
system (Kitano, 2007), p. 1). More specifically, he says that: “the coordinated
physiological processes which maintain most of the steady states in the organism […]
involving, as they may, the brain and nerves, […], all [work] cooperatively […].” This
claim, while interesting, still views robustness as an internal property within the organism
in the form of network organization. In fact, the word ‘distributed’ in neuroscience and
artificial intelligence, among other fields, still means ‘distributed within the brain’ (i.e.
like distributed parallel computation in neural networks; (Arbib, 1995).
A theoretical holistic approach in these fields usually implies that organisms obtain
information from the environment (including the body) in a way no dedicated internal
control system could possibly emulate (Espenschied et al., 1996; Pfeifer & Bongard,
2006; Pfeifer & Scheier, 2001; Scheier, Pfeifer & Kunyioshi, 1998). Krakauer (2005,
section 3.6.) describes such a distribution as follows: “distributed processing, or
connectionism, might be assumed to be a combination of modularity and spatial
compartmentalization, but differs in that a single function is emergent from the collective
activities of units, and correlated activity is thereby a desired outcome.” His observation
suggests that distributed processes are beneficial for robustness in connectionist models
due to graceful degrading upon removal of individual nodes. This idea is usually
associated with structural and organizational properties of the nervous system like
modularity and redundancy (Csete & Doyle, 2002; Csete & Doyle, 2004; Godzik,
Schoenauer & Sebag, 2004; Kitano, 2004; Kitano, 2007; Krakauer, 2005; Lesne, 2008).
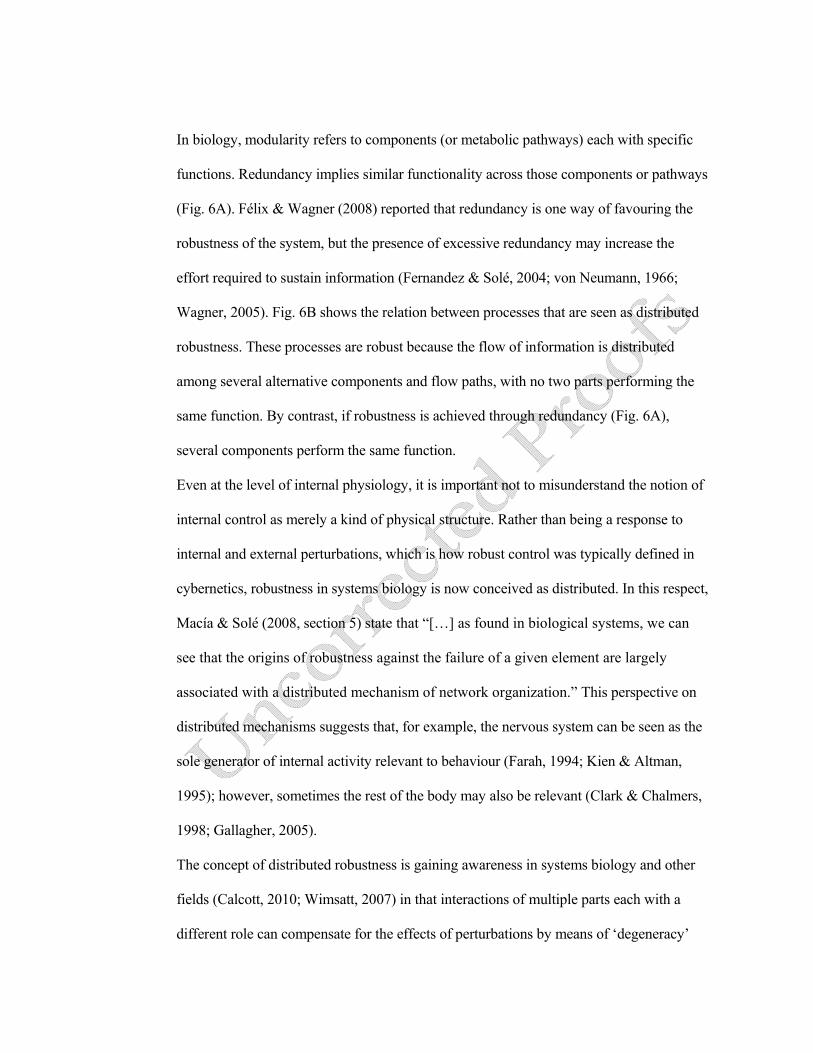
In biology, modularity refers to components (or metabolic pathways) each with specific
functions. Redundancy implies similar functionality across those components or pathways
(Fig. 6A). Félix & Wagner (2008) reported that redundancy is one way of favouring the
robustness of the system, but the presence of excessive redundancy may increase the
effort required to sustain information (Fernandez & Solé, 2004; von Neumann, 1966;
Wagner, 2005). Fig. 6B shows the relation between processes that are seen as distributed
robustness. These processes are robust because the flow of information is distributed
among several alternative components and flow paths, with no two parts performing the
same function. By contrast, if robustness is achieved through redundancy (Fig. 6A),
several components perform the same function.
Even at the level of internal physiology, it is important not to misunderstand the notion of
internal control as merely a kind of physical structure. Rather than being a response to
internal and external perturbations, which is how robust control was typically defined in
cybernetics, robustness in systems biology is now conceived as distributed. In this respect,
Macía & Solé (2008, section 5) state that “[…] as found in biological systems, we can
see that the origins of robustness against the failure of a given element are largely
associated with a distributed mechanism of network organization.” This perspective on
distributed mechanisms suggests that, for example, the nervous system can be seen as the
sole generator of internal activity relevant to behaviour (Farah, 1994; Kien & Altman,
1995); however, sometimes the rest of the body may also be relevant (Clark & Chalmers,
1998; Gallagher, 2005).
The concept of distributed robustness is gaining awareness in systems biology and other
fields (Calcott, 2010; Wimsatt, 2007) in that interactions of multiple parts each with a
different role can compensate for the effects of perturbations by means of ‘degeneracy’

(Félix & Wagner, 2008; Wagner, 2005). This concept refers to the ability of elements that
are structurally different to perform the same function (Fig. 6B) (Edelman & Gally, 2001;
Tononi, Sporns & Edelman, 1999). Despite the importance of degeneracy in explaining
distributed robustness (Wagner, 2005), this concept still deserves further investigation
mainly because it conveys intrinsic complexity of information flow. For example,
biological neural networks working as control systems are highly robust to removal of
synapses or neurons regardless of populations of neurons having different roles (Amit,
1989; Beer, 1995; Clark & Chalmers, 1998; Gallagher, 2005). The distributed processing
is consequently an integrated set of functionalities that are commonly performed by
multiple, semiautonomous units or groups of them (McClelland, 1989). More
importantly, the relationship between the distributed flow of information and the effect of
perturbation on such flow is still not easy to comprehend or replicate.
Behavioural mechanisms that distribute across the brain–body–environment might be
thought of as an additional protection against changes that threaten crucial biological
functions (cf. (Hunter, 2009; Macía & Solé, 2008; Wagner, 2005). In the context of
adaptive behaviour, Chiel & Beer (1997) and Chiel et al. (2009) stated that the nervous
system cannot process information not transduced by the body. The converse idea
suggests that properties of the body may simplify complex neural processing by using
different body dynamics and sensorimotor information. For example, to keep our torso
stable and conserve energy, we swing our arms backwards and forwards and engage in a
swing/stance cycle of our legs while walking based on foot and equilibrium feedbacks.
Some studies in cognitive science (Beer, 1995) have discussed the dynamical role of
brain, body and environment in behaviour (Fig. 4B), rather than concentrating on the
nervous system (as a control system), or its parts, as the sole behaviour producer (Fig.

4A). Here we have the beginnings of the idea that distributed mechanisms go beyond
structural functionalism. Nevertheless, there are many definitions of mechanisms in the
philosophy of science and biology. These definitions also highlight the idea of
distributed dynamics, rather than focusing on the structural properties of systems. One
influential characterization of neurobiological mechanisms is: “mechanisms are entities
and activities organized such that they are productive of regular changes from start to
termination conditions” (Machamer, Darden & Craver, 2000), section 2). From an
epistemic standpoint, the orthodox view of mechanisms as internally placed implies that
mechanisms are dynamic producers of a certain phenomenon of interest (Ashby, 1940;
Nolfi & Floreano, 2000). Kitano (2002, p. 1662) suggests that this traditional
perspective hinders understanding of the mechanistic, system-wide basis of robustness
arguing that “[t]o understand biology at the system level, we must examine the structure
and dynamics of cellular and organismal function, rather than the characteristics of
isolated parts of a cell or organism.”
Recent work in theoretical neuroscience argues that the division between behavioural
mechanisms and mechanisms generating robust traits is not straightforward. New
evidence that “the body shapes the way we think” (Pfeifer & Bongard, 2006), indicates
that the full experience of body–environment coupled dynamics continuously shapes
cognitive and behavioural abilities as well as their respective mechanisms (Fig. 4C). In
this respect, (Di Paolo, 2009) implies that cognition is a relational phenomenon of brain,
body, and environment, and thereby is not localizable (see (Ashby, 1960), p. 70).
Likewise, neuroscience and cognitive science are beginning to show how behaviour and
cognition arise as a relational phenomenon, which has an impact on behavioural
robustness research.
From a cognitive viewpoint, internal dynamics coupled to environmental processes are
resources that systems can use to reach robustness. From the organism’s perspective, the
environment acts as an external source of knowledge. These observations are also referred
to in the literature as follows: “[a]n agent’s physical body, the structure of its
environment, and its social context can play an important role in the generation of its
behaviour as its brain. Indeed, in a very real sense, cognition can no longer be seen as
limited to an agent’s head, but can be distributed across a group of agents and artifacts.”
(Beer, 2003), p. 209). The importance of this distribution is also suggested in complex
adaptive systems (CAS) research: “the actions of agents that make up the system are
entirely based on interactions with their local environment, making these two
requirements for robust behaviour interrelated.” (Whitacre & Bender, 2009), section 1).
Despite the fact that the described perspective is a minority view in several disciplines, a
growing body of research in cognitive science further reflects this view on distributed
mechanisms (Beer, 2000; Chiel & Beer, 1997; Di Paolo & Iizuka, 2008; Froese & Di
Paolo, 2011; Nolfi & Floreano, 2000; Pfeifer & Bongard, 2006; Vargas et al., 2013). This
new tendency suggests that the traditional approach of internal control for robust
behaviour does not have such a strong grip on the domain of cognitive science as is often
presumed. Moreover, the relational aspect of robustness, as I will show later, is already
starting to explore a variety of ways in which distributed mechanisms can acquire new
meanings.
In what follows, I will try to motivate a conceptual understanding of lifetime robustness
as evolutionarily constrained, and vice versa. Instead of focusing on the limits of the
traditional approach, I will show how some literature has described that relationship.

IV. LIFETIME ROBUSTNESS, YET EVOLUTIONARILY CONSTRAINED
Before proposing a definition of robustness that conveys meaning for the ‘distributed
mechanism hypothesis’, we must develop conceptually a firmer relationship between two
senses of robustness: robustness at the evolutionary and lifetime level.
Discussions herein focus on lifetime robustness concentrating on whole-organism–
environment dynamics. This decision avoids the drawbacks of studying robustness at the
evolutionary level (Wagner, 2007), since during evolution the coupled interactions of
agents with their environments are difficult to explore. Nevertheless, the relationship
between evolutionary robustness and robustness during an organism’s lifetime exists. For
instance, (Cogan, 2006), p. 20) suggests that “[r]obustness is the fundamental organising
principle of evolving dynamic systems such as biological systems. One could say that
robustness allows evolution to happen and that evolution favours robustness.”
The core of the paradigm of evolution influencing lifetime robustness, and vice versa,
mainly arises from the notion of phenotypic expression and fitness landscape. For
instance, suppose that we have found two different organisms (phenotypes) from the same
population. We can discover that both phenotypes show quantitatively similar behavioural
performance (fitness) under the same experimental conditions. After inducing mutational
changes in the organisms’ genes at the genotypic stage, we can measure a decrease in
fitness in one of the organisms at the phenotypic stage. This indicates less resilience to
certain perturbations during an organism’s lifetime. In other words, the negatively
affected phenotype suggests a decrease in fitness with respect to a certain amount of
mutation induced in the phenotype exhibiting no decay in fitness. Fitness is hard to define
strictly across organism–environment systems, but it refers to a relative quantitative
measure that helps to express the relationship between a certain perturbation on a control

variable and the resulting performance. A change in fitness can indicate less robustness
with respect to tasks that an organism should be able to accomplish (Nolfi & Floreano,
2000; Pfeifer & Bongard, 2006).
Following Burch & Chao’s (2000) arguments, we can see that such differentiation in
fitness is caused by mutations where the mutated phenotype is placed in the
multidimensional fitness landscape (i.e. a mathematical representation plotting change in
perturbed variables against level of fitness). Fig. 7 shows plots where the x and y axes
represent sequence space. The coloured dark grey surface is the fitness plane measured
during the phenotypic lifetime. Phenotypes showing decay in performance after mutation
induction are usually found in high fitness peaks before the perturbation (Fig. 7A). A
mutated phenotype showing no decay of fitness will be in a flatter region of the fitness
surface with relatively equal fitness compared to its non-mutated genotypic expression
(Fig. 7B). The resulting phenotype of the non-affected genotype therefore is more robust
with respect to induced mutations than another phenotype showing decay in fitness (see
(Elena & Sanjuán, 2003; Wilke & Adami, 2003; Wilke et al., 2001). However, as
Silverman & Ikegami (2010) discussed, some individuals of a population can display
robustness, but that does not indicate that the population as a whole is robust.
The notion of interrelating lifetime and evolutionary robustness, in combination with the
idea of robustness at the relational level, has had the effect of making some orthodox
definitions of robustness uncomfortable. In this respect, the definition of robustness can
be redefined considering several arguments reported herein. Typical definitions found in
the literature are also presented for contextual purposes.
Different meanings of robustness have been extensively reported in biology and
engineering (Calcott, 2010; Jen, 2003; Lesne, 2008). In a metabolic context, robustness

relates to limited phenotypic variation across large changes in kinetic parameters (Hurst &
Randerson, 2000; Westerhoff, Groen & Wanders, 1984). Another description from
systems biology is: “[robustness refers to] the ability to maintain performance in the face
of perturbations and uncertainty” (Stelling et al., 2004), p.675). Krakauer (2005, p.186)
also proposes that “robustness relates to two critical properties of complex biosystems:
the long-term limits to evolutionary change and the short-term persistence of system
function”. Conversely, he indicates that robustness mechanisms are one of the bridges
connecting the dynamics of ontogeny with those of phylogeny by limiting phenotypic
variation and providing the means to explore alternative genotypes without compromising
the phenotype. Despite the context dependence of his observation, Krakauer (2005)
suggests an important distinction between genotypic and environmental robustness. In the
former, perturbations (e.g. gene mutations) are inherited (de Visser et al., 2003), whereas
in the latter case they are not (Hagen & Hammerstein, 2005). These definitions, however,
hardly connect each other but the overall observation is that robustness is a phenomenon
that allows a system to maintain functionality against internal and external perturbations.
Because it is important to choose an appropriate description, I propose that: robustness is
the capacity that allows an agent (artificial or biological) to continue functioning via
tolerance or adaptation to internal and external perturbations, where this capacity is
partially determined by an agent–environment history of interactions. It is informative
then to define robustness as a property of an organism (or artificial agent) coupled to an
environment in the presence of perturbations (Fernandez-Leon, 2012). This definition
involves those situations in which an agent develops endurance to resisting perturbations,
and situations to which an agent has not developed tolerance (e.g. situations not present
during its evolution or during its lifetime history). Furthermore, this definition enables

sensible discussion of circumstances in which an agent is robust (e.g. specific
perturbations that were present during its development and evolution) and the
functionality that is maintained despite perturbations due to tolerance or changes in the
dynamics of the agent–body–environment. It also allows the possibility of perturbing the
inner organism (e.g. part of the nervous system), a trait (e.g. shape of the organism’s body
through mutilation), or a capability (e.g. sensory capacity). Furthermore, it is compatible
with a measurable notion of behavioural robustness, usually called fitness (Nolfi &
Floreano, 2000). Importantly, it is worth noting that robustness as defined herein does not
deny the relevance of internal mechanisms sustaining (instead of ensuring) a high degree
of robustness in cases of unforeseen environmental or internal changes. In fact, internal
control systems remain the most active element when understanding behaviours under
perturbations. This new definition, however, opposes the idea of an absolute role of
internal control for understanding robust capacities.
These reflections raise the question of how we can localize mechanisms in order to
account for the eventual emergence of robustness. In what follows, I will briefly consider
how to address this latter aspect.
V. DISCUSSION: ROBUSTNESS AS A RELATIONAL PHENOMENON
Previous sections presented new arguments that the maintenance of cognitive actions and
behaviours under perturbations depend deeply on the shape and structure of agent–
environment dynamics. Examples of this dependence were discussed above; see also
Ashby’s work on ultrastability (Ashby, 1960), and Di Paolo’s homeo-adaptation with the
inverse visual-sensors experiment (Di Paolo, 2000). This argument opposes the idea that
the maintenance of functionalities in behavioural systems is solely determined by the

agent’s internal structure. Unfortunately, this relationship between robustness and coupled
dynamics is rarely discussed in theoretical biology. There is plenty of work, however, on
what types of inner structures will tend to be robust as extensively presented herein (see
(Kitano, 2004; Krakauer, 2005; Wagner, 2007; Whitacre, 2012). Further, most of the
literature tends to show a one-sided view of the problem, focusing on the organism
dynamics and not on the dynamics of the coupling. If we are to take the study of lifetime
robustness seriously, we should carefully scrutinize the traditional notion that agent–
internal mechanisms ensure robustness.
A potential criticism of the approach presented herein is that behavioural robustness is
described based on a set of environmental changes (e.g., some living systems are robust to
working in the air or under water). Consequently, it might be thought that robustness
cannot be defined as a property of a system in interaction. However, this review claims
that robustness is a property of an agent in isolation (e.g. a robot is made of metal which is
robust to certain environmental conditions that do not affect metals). Robustness is also
inherently a property of the coupled agent–environment when some functionality is
maintained by the fully coupled system. This is explored below.
There are several possible claims for the distribution of mechanisms: (a) robustness
always depends on the agent–environment coupling; (b) robustness sometimes depends on
the agent–environment coupling; (c) robustness often depends on the agent–environment
coupling; (d) for certain kinds of systems, robustness strongly depends on the agent–
environment coupling; (e) robustness is understood better in the context of agent–
environment coupling. Claim (e) is slightly weaker than other claims because it does not
require that the agent–environment dynamics are the determinants of robustness in all
cases, although this also can be claimed for cases (b), (c), or (d). The dependence of

robustness to agent–environment coupling is the strongest option for claim (a), but I
believe that this claim is false. This article defends claim (e) but it also supports claim (b).
Claims (c) and (d) are more interesting: (c) because it proposes that one can expect in
general some tendency to observe agent–environment dynamics for robust behaviour, and
(d) because it prompts the question, which kind of system tends to rely more on agent–
environment dynamics? However, claims (c) and (d) are difficult to defend based on
discussions presented herein, because one needs to identify how often behavioural
robustness depends on agent–environment dynamical engagements or to classify types of
systems where robustness depends strongly on coupling.
Discussions in this paper highlight claim (b); robustness sometimes depends on the agent–
environment coupling. In other words, it is not generally appropriate to assume that the
ability to categorize, recognize, and exhibit behaviours in normal situations and under
perturbations is intrinsically a matter of agent–internal processes, and only extrinsically
related to bodily inputs and dynamics. These observations suggest that specific
environment-engaging loops and patterns of body dynamics make an essential difference
in how agents perceive the world and sustain robust behaviours. Thus, how can one
compare the distribution of a behavioural control system in relation to another system?
There are different ways to account for the distribution of a control system, which
depends on how it is hypothesized that processes split between the brain, body and
environment. For instance, the distribution criterion can be defined based on the role of
functional dependencies between an agent’s inner control system and outer environmental
dynamics (including the body). These dependencies can be rooted in coupled dynamics
that emerge from mechanisms that organisms develop for behavioural modulation (Chiel
& Beer, 1997). (Fernandez-Leon, 2012) proposed that such an identification of functional

dependencies could be based on perturbation analysis. For example, from a modelling
perspective of artificial systems, it is possible to study the effects of reducing incoming
signals (sensory feedback) in agents showing walking behaviour (Fernandez-Leon, 2011).
In this scenario, we can explore whether further dependence on sensory feedback from an
agent’s leg can be measured as decay in performance when perturbed. This is a useful
method to account for the distribution of cognitive and behavioural mechanisms in agents.
This method allows investigation into the specific ways in which the system-in-coupling
can be behaviourally robust.
Another possible alternative for practicing biologists is by studying causal contributions
using Granger Causality (G-causality) from the computational neuroscience field (Seth,
2005; Seth & Edelman, 2007). This type of analysis can be used to explain the joint
product of network structure and the dynamical processes operating on that structure,
which may be modulated by environment and context. Seth & Edelman (2007) show how
the same network structure can generate different causal networks depending on context.
G-causality has been applied to simulated neural systems to probe the relationship
between neuroanatomy, network dynamics and behaviour.
Finally, while these proposals of robustness as a relational phenomenon have highlighted
some possibilities for further studies, it is still open how a comprehensive approach to
robustness research might assist this endeavour. In other words, we still require a research
framework which will allow us to produce robust explanations (Silverman & Ikegami,
2010). More explicitly, robust explanations have the potential to identify those elements,
which drive a system’s behaviour as a whole, and whether the distributed mechanism
hypothesis of robustness can be observed in biological organisms. Using a bio-inspired
approach from artificial life, Silverman & Ikegami (2010) proposed that biological

robustness can be approached by studying multiple models of the same phenomenon (e.g.
similar robust behaviours) (cf. (Levins, 1966; Weisberg, 2005). In their view, each model
should be distinct from the others in terms of core assumptions or methodologies. The
very idea of the framework is to create experiments and computer simulations which
share common grounding and related contexts to discover the causal factors in systems
that lead to robust behaviour (Silverman & Ikegami, 2010). In this way, researchers can
develop an understanding of how those similar, but different systems achieve robustness,
and whether there is a common mechanism for robustness across systems. Based on
computational models of bio-inspired agents, (Fernandez-Leon, 2012) reported several
practical examples using associated ideas.
The purpose of these models was to capture in simplified form the dynamical essence of
robust, yet adaptive behaviour. Firstly, these models were studied by using robust
analyses in whether and how a group of simple agents achieved robust behaviours. These
behaviours are comparable to those observed in complex organisms, such as robust goal
seeking, stimulus discrimination, walking behaviour, or mobile-object tracking behaviour
under a series of structural, sensorimotor or mutational perturbations. The hypothesis
considered in these analyses was that a common relational mechanism generates robust
behaviours, and such a mechanism can be characterized using dynamical systems
explanations. (Fernandez-Leon, 2012) analysed the general problem of how the
dynamical coupling between internal control (brain), body and environment is used in the
generation of specific behaviours by means of the evolutionary robotics (ER) paradigm
(Nolfi & Floreano, 2000). Secondly, analyses focused on which mechanisms in each
model gave rise to robust behaviour. Experimental results suggested that ‘dynamic
determinacy’ – i.e. the continuous presence of a unique dynamical attractor that must be

chased during functional behaviours – is a common dynamic phenomenon in the analysed
robust and adaptive agents. Finally, this observation was used (Fernandez-Leon, 2012) to
construct a proposition that these agents showed dynamical states that were definitely and
unequivocally characterized via transient dynamics towards a unique, yet moving
attractor at a neural level (see Appendix). This determinacy emerged as a control strategy
rooted on behavioural couplings and relied on mechanisms that were distributed between
brain, body and environment.
These observations of dynamical determinacy seem to have a counterpart in experiments
in the biological realm. Briefly, the idea of transient dynamics for behavioural robustness
provides an attractive and biologically plausible account of the dynamics that can emerge
in some biological systems coupling with their environments (see (Mazor & Laurent,
2005; Rabinovich, Huerta & Laurent, 2008; Rabinovich et al., 2006). For instance, based
on how the locust antennal lobe processes information, Rabinovich et al. (2008) proposed
a computational view of how perception and cognition can be modelled as dynamic
patterns of transient activity within neural networks. Furthermore, (Laurent et al., 2001)
reported that the complex intrinsic dynamics in the antennal lobe of insects transform
static sensory stimuli into spatiotemporal patterns of neural activity. In general, these
intrinsic dynamics seem to be related somehow to the idea of neurodynamic determinacy.
A multidisciplinary combined approach to the study of robustness is expected further to
untangle the mechanisms of robustness and its association with dynamical determinacy.
Importantly, as Silverman & Ikegami (2010) noted, the examination of similar core
mechanisms in biological systems must be the next stage in order to determine whether it
is truly the primary causal element in the original behaviour of interest (see also (Calcott,
2010; Silverman & Ikegami, 2010; Wimsatt, 2007).

Although a common mechanism enabling behavioural robustness is still unknown, these
results suggest that the most plausible candidate for understanding behavioural robustness
is dynamical integration rooted on internal control, body and environment dynamics. This
integration can be obtained through the distribution of behavioural mechanisms in
systems that evolve, where such integration constitutes the basis for several broader
considerations about brain dynamics as coordinated spatio-temporal patterns. In this
respect the development of a comprehensive research programme to investigate such
explanations can be seen as an important milestone for both natural and bio-inspired
robust systems research.
VI. CONCLUSIONS
(1) Understanding the structure and dynamical properties of isolated components is
important in the study of functional aspects of specific components producing control
activities. To recognize properties that are more realistic in a highly coupled robust
system, one must view the system as a whole.
(2) If we recognize that systemic robustness does not rely exclusively on a particular
inner structure ensuring robust behaviour, but depends essentially on the agent–body–
environment domain, then robustness is a collective dynamical and relational
phenomenon.
(3) The wider phenomenology of biological robustness can be determined by the
causation patterns that regulate internal controls for coherent behaviour. The outcomes
of those causation patterns are instantiated in some way in the organism’s sensory-
motor system. These outcomes can lead to internal causation patterns that are not
independent of organisms’ physiologies.

(4) None of the reviewed works claims that the environment plays absolutely no role in
deciding whether a system is robust or not. However, in most of the reviewed works,
internal dynamics remain as an essential element in organism-environment coupled
interaction.
(5) The growing consensus about the importance of brain–body–environment couplings is
still a minority view in several disciplines. These include cognitive psychology,
neuroscience, and a good part of artificial intelligence, robotics, and several subfields
within biology.
(6) The importance of developing a comprehensive research programme to develop a
better understanding of robustness from multidisciplinary fields can be seen as an
important goal for both natural and bio-inspired robust systems research.
VII. ACKNOWLEDGEMENTS
The author would like to thank Dr Inman Harvey, Dr Andy Philippides, Dr Takashi
Ikegami and Dr Ezequiel Di Paolo for observations in an early version of this article.
Thanks also to Dr Eric Silverman for his detailed and thoughtful comments on how to
present the ideas in this article. I am grateful to Sarah Eagleman, members of CCNR
(University of Sussex), and anonymous reviewers. The work presented here benefited
originally from the financial support of the Programme AlBan (The European Union
Programme of High Level Scholarships for Latin America, No. E05D059829AR), The
Peter Carpenter CCNR DPhil Award (University of Sussex, UK), and was scientifically
recognized by CONICET (The National Council of Scientific and Technological
Research, Argentina).

VIII. REFERENCES
ABRAHAM, R. & SHAW, C. (1992). Dynamics, the Geometry of Behavior. Aerial Press, 1982-1988, Addison Wesley, 1992.
ALON, U., SURETTE, M., BARKAI, N. & LEIBLER, S. (1999). Robustness in bacterial chemotaxis. Nature 397, 168-171.
AMIT, D. (1989). Modeling Brain Function. The World of Attractor Neural Networks. Cambridge University Press, Cambridge, UK.
ANDERSON, C. (2002). Self-organization in relation to several similar concepts: are the boundaries to self-organization indistinct? Biological Bulletin 202, 247-255.
ARBIB, M. E. (1995). The Handbook of Brain Theory and Neural Networks. The MIT Press. ASHBY, W. (1940). Adaptiveness and equilibrium. Journal of Mental Science 86, 478. ASHBY, W. (1947). Principles of the self-organizing dynamic system. Journal of General Psychology 37,
125-128. ASHBY, W. (1956). An introduction to cybernetics. Chapman & May, London, UK. ASHBY, W. (1958). Requisite Variety and its implications for the control of complex systems.
Cybernetica (Namur) 1. ASHBY, W. (1960). Design for a brain. 2nd ed. Wiley, NY. ASHBY, W. (1962). Principles of the self-organizing system. Principles of Self-Organization, 255-278. ASHBY, W. (1981). Mechanisms of Intelligence: Ashbys Writings on Cybernetics. Intersystems
Publications. BARANDIARAN, X. (2004). Behavioral adaptive autonomy: a milestone in Alife route to AI? In The
9th International Conference on Artificial Life, pp. 514-521. MIT Press, Cambridge, MA. BEER, R. (1995). A dynamical systems perspective on agent-environment interaction. Artificial
Intelligence 72, 173-215. BEER, R. (1997). The dynamics of adaptive behavior: A research program. Robotics and
Autonomous Systems 20, 257-289. BEER, R. (2000). Dynamical approaches to cognitive science. Trends in Cognitive Sciences 4, 91-
99. BEER, R. (2003). The dynamics of active categorical perception in an evolved model agent.
Adaptive Behavior 11, 209-243. BEER, R. (2004). Autopoiesis and cognition in the game of Life. Artificial Life 10, 309-326. BEER, R. & CHIEL, H. (1990). Neural implementation of motivated behavior: Feeding in an
artificial insect. Advances in Neural Information Processing Systems 2, 44-51. BERNARD, C. (1974). Lectures on the phenomena common to animals and plants. Trans Hoff HE, Guillemin
R, Guillemin L, Springfield (IL): Charles C Thomas BODEN, M. (1999). Is Metabolism Necessary? British Journal of Philosophy and Science 231. BRIN, M. & STUCK, G. (2002). Introduction to Dynamical Systems. Cambridge University Press. BURCH, C. & CHAO, L. (2000). Evolvability of an RNA virus is determined by its mutational
neighbourhood. Nature 406, 625-628. CALCOTT, B. (2010). Wimsatt and the robustness family: Review of Wimsatt’s Re-engineering
Philosophy for Limited Beings. Journal Biology and Philosophy: Review Essay. CANNON, W. (1939). The Wisdom of the Body. London: Norton.

CHIEL, H. & BEER, R. (1997). The brain has a body: Adaptive behavior emerges from interactions of nervous system, body and environment. Trends in Neurosciences 20, 553-557.
CLARK, A. & CHALMERS, D. (1998). The extended mind. Analysis 58, 7-19. COGAN, B. (2006). Computing Robustness in Biology. Scientific Computing World, 20-21. CSETE, M. & DOYLE, J. (2002). Reverse engineering of biological complexity. Science 295. CSETE, M. & DOYLE, J. (2004). Bow ties, metabolism and disease. Trends Biotechnol 22, 446-450. DE JAEGHER, H. & DI PAOLO, E. (2013). Enactivism is not interactionism. Front. Hum. Neurosci. 6. DE VISSER, J., HERMISSON, J., WAGNER, G. & AL., E. (2003). Evolution and detection of genetic
robustness. Evolution 57, 1959-1972. DEMONGEOT, J., MORVAN, M. & SENE, S. (2008). Robustness of dynamical systems attraction basins against
state perturbations: a theoretical protocol and application in systems biology. In Conf. on Complex, Intelligent and Software Intensive Systems, pp. 675-681. IEEE Computer Society.
DI PAOLO, E. (2000). Homeostatic adaptation to inversion of the visual field and other sensorimotor disruptions. In The Sixth International Conference on the Simulation of Adaptive Behavior (ed. A. B. J-A. Meyer, D. Floreano, H. Roitblat and S W. Wilson), pp. 440-449. MIT Press.
DI PAOLO, E. (2005). Autopoiesis, adaptivity, teleology, agency. Phenomenology and the Cognitive Sciences 4, 429-452.
DI PAOLO, E. (2009). Extended Life. Topoi 28, 9-21. DI PAOLO, E. & IIZUKA, H. (2008). How (not) to model autonomous behaviour. BioSystems 91,
409-423. DIACU, F. & HOLMES, P. (1996). Celestial Encounters. Princeton University Press. EDELMAN, G. (1987). Neural darwinism: the theory of neuronal group selection. Basic Books, New York. EDELMAN, G. & GALLY, J. (2001). Degeneracy and complexity in biological systems. Proceedings
of the National Academy of Sciences USA 98, 763-768. ELENA, S. & SANJUÁN, R. (2003). Climb every mountain? Science 302, 2074-2075. ESPENSCHIED, K., QUINN, R., BEER, R. & CHIEL, H. (1996). Biologically based distributed control
and local reflexes improve rough terrain locomotion in a hexapod robot. Robotics and Autonomous Systems 18, 59-64.
FARAH, M. (1994). Neuropsychological inference with an interactive brain: A critique of the “locality” assumption. Behavioral and Brain Sciences 17, 43-61.
FÉLIX, M. & WAGNER, A. (2008). Robustness and evolution: concepts, insights and challenges from a developmental model system. Heredity 100, 132-140.
FERNANDEZ-LEON, J. A. (2011). Evolving experience-dependent robust behaviour in embodied agents. BioSystems 103, 45-56.
FERNANDEZ-LEON, J. A. (2012). Behavioral robustness: an emergent phenomenon by means of distributed mechanisms and neurodynamics determinacy. BioSystems 107, 34-51.
FERNANDEZ, P. & SOLÉ, R. (2004). The role of computation in complex regulatory networks. Landes Bioscience.
FREILICH, S., KREIMER, A., BORENSTEIN, E., GOPHNA, U., SHARAN, R. & RUPPIN, E. (2010). Decoupling environment-dependet and independent genetic robustness across bacterial species. PLoS Computational Biology 2, e1000690.
FRIEDMAN, G. (1996). The Space Studies Institute View on Self-Replication. The Assembler: Newsletter of the Molecular Manufacturing Shortcut Group of the National Space Society 4.
FROESE, T. & DI PAOLO, E. A. (2011). The Enactive Approach: Theoretical Sketches From Cell to Society. Pragmatics & Cognition 19, 1-36.
GALLAGHER, S. (2005). How the Body Shapes the Mind. NY: Oxford University Press. GLANSDORFF, P. & PRIGOGINE, I. (1971). Thermodynamic Theory of Structure, Stability and Fluctuations.
Wiley-Interscience, London

GODZIK, N., SCHOENAUER, M. & SEBAG, M. (2004). Robustness in the long run: Auto-teaching vs. Anticipation in Evolutionary Robotics. In Parallel Problem Solving from Nature - PPSN VIII, pp. 932-941. Berlin/Heidelberg: Springer.
GROSS, C. (2009). A hole in the head: more tales in the history of neuroscience. The MIT Press. GROSS, C. G. (1998). Claude Bernard and the constancy of the internal environment. Neuroscientist 4, 380-
385. HAGEN, E. & HAMMERSTEIN, P. (2005). Evolutionary biology and the strategic view of ontogeny:
Robustness versus flexibility in the life course. Research in Human Development 2, 83-97. HANCZYC, M. & IKEGAMI, T. (2009). The search for a first cell under the maximalism design principle.
Journal of Technoetic Arts 7. HEALEY, M. (1975). Principles of automatic control. The English Universities Press Limited. HELD, R. (1965). Plasticity in sensory-motor systems. Scientific American 213, 84-89. HOROWITZ, P. & HILL, W. (1989). The art of electronics. Cambridge, MA: Cambridge University
Press. HUNTER, P. (2009). Robust yet flexible. EMBO reports: Science and Society 10, 949-952. HURST, L. & RANDERSON, J. (2000). Dosage, deletions and dominance: simple models of the
evolution of gene expression. Journal of Theoretical Biology 205, 641-647. IKEGAMI, T. & SUZUKI, K. (2008). From a Homeostatic to a Homeodynamic Self. BioSystems 91, 388-400. JEN, E. (2003). Stable or robust? What's the difference? Complexity, Wiley InterScience 8, 12-18. KELSO, J. (1995). Dynamic patterns: the self-organization of brain and behavior. Cambridge, MA:
MIT Press. KELSO, J. A. S., CASE, P., HOLROYD, T., HORVATH, E., RACZASZEK, J., TULLER, B. & DING, M.
(1995). Multistability and metastability in perceptual and brain dynamics (ed. P. K. M. Stadler), pp. 159-185. Springer, Heidelberg, Germany.
KIEN, J. & ALTMAN, J. (1995). Modelling the generation of long-term neuronal activity underlying behaviour. Prog. Neurobiol. 45, 361-372.
KITANO, H. (2004). Biological Robustness. Nature Reviews: Genetics, Nature Publishing Group 5, 826-837.
KITANO, H. (2007). Towards a theory of biological robustness. Molecular Systems Biology, EMBO and Nature Publishing Group 3, 137.
KOHLER, I. (1962). Experiments with goggles. Scientific American 206, 62-72. KONDOH, M. (2007). Anti-predator defence and the complexity-stability relationship of food webs.
Proceedings of Biological Sciences 274, 1617. KRAKAUER, D. (2005). Robustness in biological systems: a provisional taxonomy. Complex
Systems Science in Biomedicine, Plenum, 185-207. KULL, K. (2010). Umwelt. In The Routledge Companion to Semiotics (ed. P. Cobley), pp. 348-349, London:
Routledge. LAURENT, G., STOPFER, M., FRIEDRICH, R., RABINOVICH, M., VOLKOVSKII, A. & ABARBANEL, H. (2001).
Odor encoding as an active, dynamical process: Experiments, computation, and theory. Annual Review of Neuroscience 24, 263-297.
LEIDY, J. (1878). Amoeba proteus. The American Naturalist 12, 235-238. LESNE, A. (2008). Biological robustness: what do we learn from (mathematical) physics?
Biological Reviews 83, 509-532. LEVINS, R. (1966). The strategy of model-building in population biology. American Scientist 54, 421-431. LLOYD, D., AON, M. A. & CORTASSA, S. (2001). Why homeodynamics, not homeostasis? . ScientificWorld
Journal 1, 133-45. MACHAMER, P., DARDEN, L. & CRAVER, C. (2000). Thinking About Mechanisms. Philosophy of
Science 67, 1-25. MACÍA, J. & SOLÉ, R. (2008). Distributed robustness in cellular networks: insights from evolved
digital circuits. Journal of the Royal Society Interface 442, 259-264. MACINNES, I. & DI PAOLO, E. (2006). The advantages of evolving perceptual cues. Adaptive
Behavior 14, 147-156.

MATURANA, H. & VARELA, F. (1987). Autopoiesis and cognition: the realization of the living. Boston, MA: Reidel.
MAZOR, O. & LAURENT, G. (2005). Transient dynamics vs. fixed points in odor representations by locust antennal lobe projection neurons. Neuron 48, 661-673.
MCCLELLAND, J. (1989). Parallel distributed processing: Implications for cognition and development. In Parallel distributed processing: Implications for psychology and neurobiology (ed. R. Morris), pp. 8-45. NY: Oxford University Press.
MEDIO, A. & LINES, M. (2001). Nonlinear Dynamics: A Primer. Cambridge University Press. NOLFI, S. & FLOREANO, D. (2000). Evolutionary Robotics. The Biology, Technoloy, and
Intelligence of Self-Organizing Machines. MIT Press. PFEIFER, R. & BONGARD, J. (2006). How the Body Shapes the Way We Think: A New View of
Intelligence. Bradford Books, MIT Press. PFEIFER, R. & SCHEIER, C. (2001). Understanding Intelligence. MIT Press. RABINOVICH, M., HUERTA, R. & LAURENT, G. (2008). Transient Dynamics for Neural Processing.
Science 321, 48-50. RABINOVICH, M., VARONA, P., SELVERSTON, A. & ABARBANEL, H. (2006). Dynamical principles
in neuroscience. Reviews of Modern Physics 78, 1213-1265. SAYAMA, H. (1996). Von Neumann's Machine in the Shell: Enhancing the Robustness of Self-
Replication Processes. In The Eighth International Conference on Artificial Life, pp. 49-52. Cambridge, MA: MIT Press.
SCHEIER, C., PFEIFER, R. & KUNYIOSHI, Y. (1998). Embedded neural networks: exploiting constraints. Neural Networks 11.
SETH, A. (2005). Causal connectivity analysis of evolved neural networks during behavior. Network: Computation in Neural Systems 16.
SETH, A. & EDELMAN, G. (2007). Distinguishing causal interactions in neural populations. Neural Comput. 19, 910-933.
SILVERMAN, E. & IKEGAMI, T. (2010). Robustness in Artificial Life. Int. J. Bio-Inspired Computation 2, 197-212.
STEBBING, A. (2009). Interpreting ‘Dose-Response’ Curves Using Homeodynamic Data: With an Improved Explanation for Hormesis. Dose Response 7, 221-233.
STELLING, J., SAUER, U., SZALLASI, Z., DOYLE III, F. & DOYLE, J. (2004). Robustness of cellular functions. Cell 118, 675-685.
STEWART, J., GAPENNE, O. & DI PAOLO, E. E. (2013). Enaction: Toward a New Paradigm for Cognitive Science. MIT Press.
STROGATZ, S. (1994). Nonlinear Dynamics & Chaos Reading, MA: Addison-Wesley. TONONI, G., SPORNS, O. & EDELMAN, G. (1999). Measures of degeneracy and redundancy in
biological networks Proceedings of the National Academy of Sciences USA 96, 3257-3262.
UMPLEBY, S. (2009). Ross Ashby's general theory of adaptive systems. International Journal of General Systems 38, 231-238.
VARGAS, P. A., DI PAOLO, E. A., HARVEY, I. & HUSBANDS, P. (2013). The Horizons of Evolutionary Robotics. MIT Press.
VON BERTALANFFY, L. (1968). General System Theory: Foundations, Development, Applications. George Braziller, Inc. Pub.
VON NEUMANN, J. (1956). Probabilistic logics and the synarticle of reliable organisms from unreliable components. In Automata Studies. E. C. Shannon and J. McCarthy, A., Princeton: Princeton University Press.
VON NEUMANN, J. (1966). Theory of Self-Reproducing Automata. IL: University of Illinois Press. VON NEUMANN, J. (1987). The General and Logical Theory of Automata. In Papers of John von
Neumann on Computing and Computer Theory (ed. W. Aspray, and Burks, A. W.), pp. 391-431. NY: John Wiley.

VON UEXKÜLL, J. (1926). Theoretical Biology. Kegan Paul, Trench, Trubner & Co., London, UK. VON UEXKÜLL, J. (1957). A stroll through the worlds of animals and men: A picture book of
invisible worlds. In Instinctive Behaviour: The development of a modern concept (ed. C. Schiller). International Universities Press, Inc., NY.
WAGNER, A. (2005). Distributed robustness versus redundancy as causes of mutational robustness. BioEssays: news and reviews in molecular, cellular and developmental biology 27, 176-188.
WAGNER, A. (2007). Robustness and Evolvability in Living Systems. Princeton University Press. WEISBERG, M. (2005). Robustness analysis. Philosophy of Science 73, 730-742. WESTERHOFF, H., GROEN, A. & WANDERS, R. (1984). Modern theories of metabolic control and
their applications (review). Biosci. Rep. 4, 1-22. WHITACRE, J. (2012). Biological robustness: paradigms, mechanisms, and systems principles. Frontiers in
Genetics 3, 1-15. WHITACRE, J. & BENDER, A. (2009). Networked buffering: a basic mechanism for distributed
robustness in complex adaptive systems. Royal Society Interfaces, arXiv:0912.1961. WILKE, C. & ADAMI, C. (2003). Evolution of mutational robustness. Mutation Research 522, 3-11. WILKE, C., WANG, J., OFRIA, C., LENSKI, R. & ADAMI, C. (2001). Evolution of digital organisms
at high mutation rates leads to survival of the flattest. Nature 412, 331-333. WIMSATT, W. (2007). Re-engineering philosophy for limited beings: piecewise approximations to
reality. Harvard University Press, Cambridge.
IX. APPENDIX: BASIC CONCEPTS FROM NON-LINEAR DYNAMICAL
SYSTEMS THEORY
This section briefly introduces some basic concepts used in dynamical systems theory
(Strogatz, 1994). A more complete description of dynamical systems theory, for readers
interested in dynamical systems with applications to biology, physics, chemistry, and
engineering can be found in (Strogatz, 1994); for a graphical representation of dynamical
system concepts see (Abraham & Shaw, 1992); for discussions on brain dynamics see
(Kelso, 1995; Kelso et al., 1995); for discussions on adaptation in a multistable system
context see (Ashby, 1960); introductory descriptions can be found at (Abraham & Shaw,
1992; Brin & Stuck, 2002; Medio & Lines, 2001).
First, consider a simple gravity pendulum (Fig. A1). Whatever the starting position, and
assuming friction or air resistance affecting the massive bob, a pendulum moving freely
will oscillate and slow down to its lowest point.
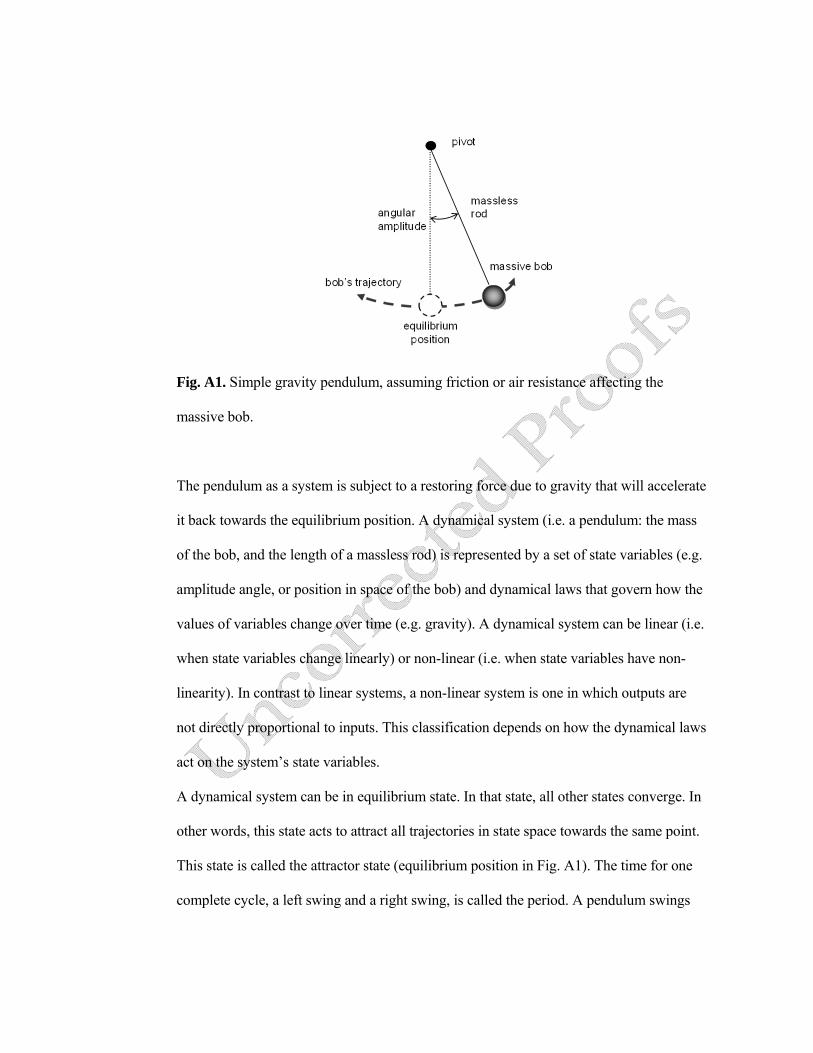
Fig. A1. Simple gravity pendulum, assuming friction or air resistance affecting the
massive bob.
The pendulum as a system is subject to a restoring force due to gravity that will accelerate
it back towards the equilibrium position. A dynamical system (i.e. a pendulum: the mass
of the bob, and the length of a massless rod) is represented by a set of state variables (e.g.
amplitude angle, or position in space of the bob) and dynamical laws that govern how the
values of variables change over time (e.g. gravity). A dynamical system can be linear (i.e.
when state variables change linearly) or non-linear (i.e. when state variables have non-
linearity). In contrast to linear systems, a non-linear system is one in which outputs are
not directly proportional to inputs. This classification depends on how the dynamical laws
act on the system’s state variables.
A dynamical system can be in equilibrium state. In that state, all other states converge. In
other words, this state acts to attract all trajectories in state space towards the same point.
This state is called the attractor state (equilibrium position in Fig. A1). The time for one
complete cycle, a left swing and a right swing, is called the period. A pendulum swings

with a specific period which depends (mainly) on its massless rod length. For example,
when released, the restoring force combined with the pendulum’s mass produces
oscillations about the equilibrium position (i.e. movements of the massive bob swinging
back and forth, over a long period of time).
Fig. A2. Point attractors representing trajectories that converge in the same equilibrium
state. (A) Direct trajectories; (B) oscillating trajectory as observed in a simple pendulum
system assuming friction or air resistance.
State variables represent the position over time of a system (e.g. the pendulum) in a
dynamical state space. The state space of the system is the set of possible values that state
variables can reach following the dynamical law or vector field in such space (e.g. the
bob’s trajectory measured in terms of angle amplitude). Consequently, a dynamical
trajectory of a system is the sequence of states generated by the action of the dynamical
law starting from some initial state.
The dynamical flow refers to the set of all dynamical trajectories through every point in
the state space (see arrows in Fig. A2). In general, those trajectories that are not stable

points are called transient dynamics towards an attractor. A picture showing all of the
qualitatively different dynamical trajectories of the system is called a phase portrait
(Strogatz, 1994). A phase portrait is a geometric representation of the trajectories of a
dynamical system in the phase plane for fixed values of parameters. Each set of initial
conditions is represented by a different curve or point.
Fig. A3. Simple gravity pendulum, assuming no friction or air resistance. The arrows
represent trajectories starting outside the attractor (circle), but ending up in a continuous
cycle along the attractor.
The combination of two different influences acting on the massive bob, one dampening
differences and another amplifying them, can create non-linearity in our example. These
influences will still create an attractor in state space since different initial positions of the
pendulum will all converge on the same periodic trajectory. These influences will create a
limit cycle: a closed, one-dimensional line of sequential points (Fig. A3).
Other basic concepts are attractor states and bifurcations. Attractor states are sets of points
that remain invariant under the dynamical law in the state space. For example, a stable
attractor has the property that all trajectories passing through all nearby states converge to

it, where the set of initial states that converge to a given attractor is termed its basin of
attraction. A basin of attraction is the set of initial conditions leading to long-term
behaviour that approaches that attractor (see Fig. A4).
Fig. A4. Schematics of three attractors in state space with trajectories leading into them.
Dotted lines represent divisions between their respective basins of attraction.
A characteristic of highly non-linear systems is that they generally have several attractors.
When considering several variables of interest describing a dynamical system, a point in
parameter space stands for a specific combination of all parameter values. Thus, the state
space is related to a fixed set of basins of attraction and attractors in the corresponding
state space of the dynamical system or phase portrait. In phase space, all possible states of
a system (or allowed combination of values of the system’s variables) are represented
with each probable state of the system corresponding to one unique point in the space
(Fig. A4).

A bifurcation occurs when a small smooth change made to the parameter values (the
bifurcation parameters) of a system causes a sudden qualitative or topological change.
Usually, bifurcations mean that the dynamical flow at one particular moment approaches
one attractor following its basin of attraction. The appearance of a border separating two
attractors is called a bifurcation. Importantly, bifurcations happen in phase space, rather
than in parameter space (Fig. A4).
In terms of small perturbations, dynamical systems can be structurally stable. This
indicates that small variations in the parameter values will produce little change in the
dynamical flow. In brief, if a perturbation does not change the topological relationship of
the flow, we say it is structurally stable. In other words, the limit sets and basins of
attraction may slightly deform and move, but the new flow will be qualitatively similar to
that before the perturbation (Demongeot, Morvan & Sene, 2008). This concept suggests
that a system can remain relatively unaltered despite small variations in its components
and relations regardless of the effects of perturbations on the structure of a system.
Consequently, the looseness involved in determining the size of a perturbation is due to
maintenance of the systemic structure.
Finally, the concept of multistability can be described as multistate dynamics (Fig. A4).
When we refer to multistability, we are usually talking about stable states or attractors; the
stability of a state depends on how quickly the system returns to a state following a
perturbation. Each state corresponds to an attractor co-existing in the phase space
associated to the activity in specific components of a system (i.e. the state variables).
Transitions between these states triggered by external perturbations can be represented in
state space by switching between two (or several) basins of attraction.

FIGURE LEGENDS
Fig. 1. Schematics of von Uexküll’s description of functional circles between the
organism and the environment (von Uexküll, 1926; von Uexküll, 1957). Adapted from
(Macinnes & Di Paolo, 2006).
Fig. 2. Ashby’s ultrastable system. E represents the essential variables. S is those
parameters that affect the sub-system R that controls the interaction with the
environment. See text for further details.
Fig. 3. Schematic representation of a closed system and its boundary. (A) The agent-
based idealization of a system. (B) The agent–environment system perspective. Dotted-
line squares represent two different notions of a system discussed herein. Schematics
based on interpretations from (Beer, 1997; Chiel & Beer, 1997; von Bertalanffy, 1968).
Fig. 4. Approaches to explaining robust and adaptive behaviour of the nervous system–
body–environment system. (A) The usual understanding of behavioural robustness in
neural systems defined as the inner-based mechanistic approach. (B) The adaptive
behaviour approach. (C) A systemic view of behavioural robustness. NN, neural
network. See main text for further details. Figures adapted and extended from (Chiel &
Beer, 1997) and (Barandiaran, 2004).
Fig. 5. Illustration of environmental influences and the effect of perturbations on inner
dynamics. In A, two environments are shown (rich and minimal media). Plots adapted

from (Freilich et al., 2010). In B, a current state of an internal control can be modified
by small or large perturbations (thick black arrows) pushing the agent–internal
dynamics within the current boundary of attraction or far from it. NN, neural network.
See main text for further details. Plot adapted from (Kitano, 2004; Kitano, 2007).
Fig. 6. Illustration of redundancy (A) and distributed robustness (B). Plots show a
hypothetical organization in which an upstream signal from the upper white circles is
processed by a number of intermediate components (dark circles) to a downstream
effector (lower white circles). Adapted from (Félix & Wagner, 2008).
Fig. 7. Schematic representation of a landscape characterized by peaks of high fitness
(z-axis) but low robustness, and others of low fitness with high neutrality (robustness).
(A) Control case. (B) After an increase in mutation rate on solutions (e.g. genotypes).
See main text for further descriptions. Figures adapted from (Burch & Chao, 2000).
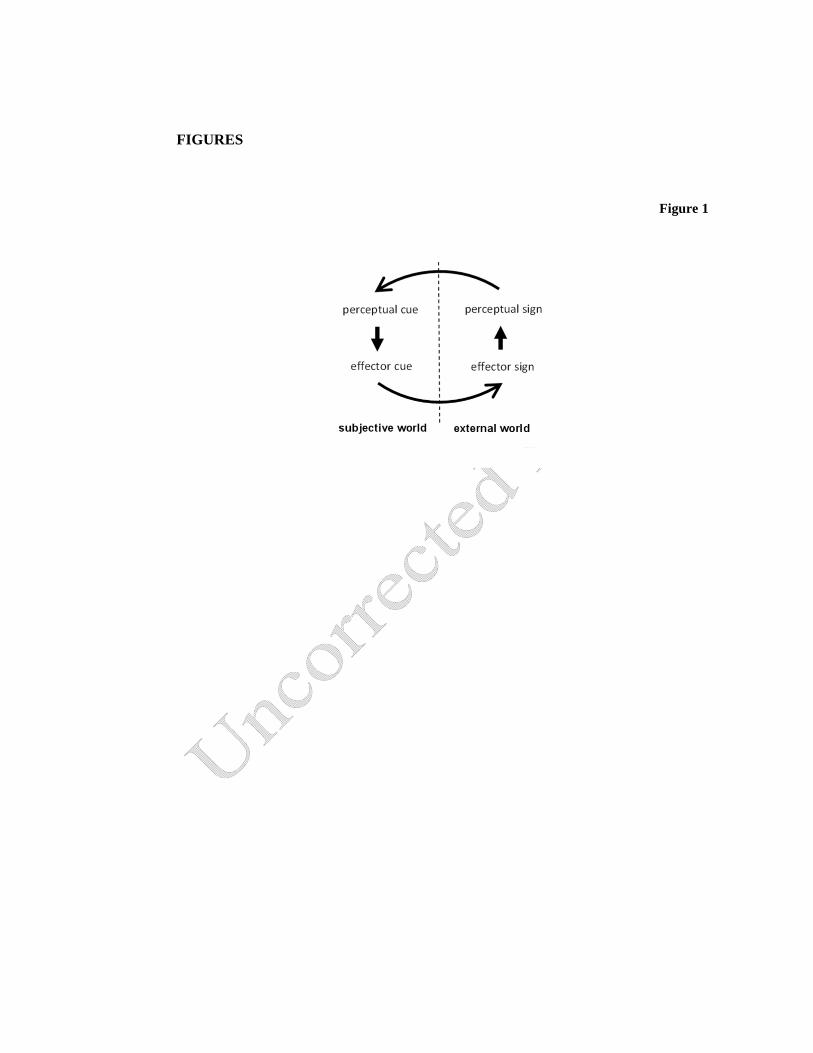
FIGURES
Figure 1

Figure 2

Figure 3

Figure 4

Figure 5

Figure 6

Figure 7