A Fuzzy Path Selection Strategy for Aircraft Landing on a Carrier

Robust Model Predictive Control of Shimmy Vibrationin Aircraft Landing Gears with Probabilistic Uncertainty
Amir Hajiloo, Student Member, IEEE and Wen-Fang Xie, Senior Member, IEEE
Abstract— This paper considers robust model predictivecontrol (RMPC) methods for linear parameter varying (LPV)system which has both probabilistic uncertain and time-varyingparameters. The parameters are considered to be measuredon-line. In this regard, the aircraft landing gear system isconsidered as a LPV system whose parameters variation canaffect both stability and performance. By transforming thissystem into a convex combination of linear time-invariant ver-tices form with the tensor-product (TP) model transformationmethod, the landing gear system is represented as a polytopiclinear parameter-varying system. A computationally efficientRMPC law is formulated for this system which guaranteesclosed-loop robust stability and performance. The control signalis calculated on-line by carrying out the convex optimizationinvolving Linear Matrix Inequalities (LMIs) in MPC. The pro-posed controller can effectively suppress the shimmy vibrationof the landing gear with variable taxiing velocity and wheelcaster length, also with the probabilistic uncertain torsionalspring stiffness.
I. INTRODUCTION
One of the major concerns in the aircraft landing gear de-sign is shimmy vibration. The kinetic energy of the forwardmotion of the aircraft provides the energy for this type ofvibration, which leads to the self–excited torsional oscillationof tires about vertical axis [1]. Also, shimmy vibration mayresult in instability. This oscillatory motion may also be dueto both the forces produced by runway surface irregularitiesand non–uniformities of the tires. The shimmy vibrationtypically has a frequency range between 10 to 30 Hz, [2].The analysis of shimmy formation can be found in [1], [2].
Shimmy vibration can lead to serious problems such asexcessive wear, shortened life cycle of gear parts, discomfort,safety concerns, and discomfort for pilots and passengers. Inorder to suppress shimmy motion, shimmy damper is usedin Boeing 737 and Airbus A–320 aircrafts as a conventionalpreventive measure. However, as mentioned in [2], shimmydamping requirements are often conflicting with good high–speed directional control; furthermore, once the landing geardesign is completed, the structural parameters for shimmysuppression cannot be changed. Hence, when external dis-turbances or uncertain parameters arise in the landing gearsystem, no further action can be taken. In some operationsituations such as worn parts, severe climate, and roughrunway, the semi–active control strategy [3] or active control
This work was supported by NSERC Discovery grant.Amir Hajiloo is with the Department of Mechanical and
Industrial Engineering, Concordia University, Montreal, [email protected]
Wen-Fang Xie is with the Department of Mechanical andIndustrial Engineering, Concordia University, Montreal, [email protected]
strategy can be effective for shimmy vibration control. Withthe advent of high speed and highly reliable microproces-sors used in controller implementation, the idea of activelycontrolled landing gear has gained new momentum. Eventhough the concept of active landing gear is not new (startedin seventies), no production aircraft is as yet equipped withsuch a system, as reported in [4]. Furthermore,there is scantresearch on developing the control strategy that can deal withtime varying parameters and the uncertainty of landing gears.
In this paper, we adopt Model Predictive Control (MPC)or Receding Horizon Control (RHC) as an active shimmysuppression strategy [5], [6]. Robust control is a synthesisthat optimizes worst–case performance specification andidentifies worst–case parameters as long as the plant remainsvarying in some specified set. The uncertain model appearswhen system parameters are not precisely known, or mayvary over a given range. In Ref. [7], a Robust MPC (RMPC)synthesis is proposed that allows explicit incorporation of thedescription of plant uncertainties. In addition, the problem ofminimizing an upper bound on the worst–case is reduced toa convex optimization involving LMIs. It has been provedthat the feasible receding horizon state–feedback control,can robustly stabilize the set of uncertain plants. Motivatedby Ref. [7], Cuzzola et al.,[8] presented a new approachbased on the use of several Lyapunov functions, each ofwhich corresponds to a different vertex of the uncertainty’spolytope. N. Wada, [9] proposed a method for synthesizingthe MPC law for Linear Parameter Varying (LPV) systems byusing the Parameter Dependent Lyapunov Function (PDLF)and claimed less conservative control performance.
In the present study, the aircraft landing gear shimmydynamics model presented in [4], [10] is used to investigatethe stability and performance variations with respect to vary-ing caster length, taxiing velocity and spring stiffness. Theconsidered linearized landing gear system is a typical LinearParameter Varying system, whose state–space matrices arefunctions of those varying parameter. Using the TP modeltransformation method [11], a discrete polytopic LPV modelfor aircraft landing gear system is obtained easily.
The computational load involved in RMPC is a challeng-ing problem in an on–line RMPC application. To deal withthis drawback, a modified strategy is proposed in the presentpaper to stabilize the LPV system with reduced computa-tional load. The control objective of the proposed RMPC isto steer the yaw angle to zero in order to suppress the shimmywhen the landing gear system is subjected to uncertainties,which are varying taxiing velocity, and wheel caster lengthduring landing; also, torsional spring stiffness considered as
2014 IEEE Conference on Control Applications (CCA)Part of 2014 IEEE Multi-conference on Systems and ControlOctober 8-10, 2014. Antibes, France
978-1-4799-7409-2/14/$31.00 ©2014 IEEE 146

(a) (b)
Fig. 1. (a) Side view and (b) top view of Landing Gear model [10].
the probabilistic uncertain parameter. Therefore, both time–varying and probabilistic uncertain parameters are consideredin this study. The performance of the designed controller isverified by simulation results, which shows that the proposedRMPC using LMI approach leads to finding a solution ateach sample time with guaranteed closed–loop stability, highcomputational efficiency and strong disturbance rejectionability.
The paper is organised as follows. Section II presentsshimmy model and analysis for a typical landing gear. Somesimulation results show the causes of shimmy oscillationand how the stability varies with taxiing velocity. SectionIII is devoted to describe a modified RMPC algorithmfor LPV system. The simulation results of the proposedcontrol strategies in shimmy suppression are presented todemonstrate the control performance and the computationalefficiency in Section IV. Section V presents the conclusionsfrom the study.
II. LPV SHIMMY MODEL
We consider an aircraft landing gear model shown in Fig.1 which is described in [4], [10]. According to [10], thestate-space equations of the linearized model can be writtenas
x(t) = Ax(t) + Bu(t), (1)
z(t) = Cx(t), (2)
where,
x =
ψψy
, (3)
which is the state vector of the system, including, yaw angle,ψ(rad), yaw rate, ψ(rad/s), and lateral deflection, y(m).z is the output of the system, yaw angle. Also, matricesA ∈ R3×3, B ∈ R3×1 and C ∈ R1×3are defined as follows
A =
0 1 0−KIz− cIz
+ κV Iz
Fz
Izσ(CMα − eCFα)
V e− a −Vσ
, (4)
B =
0ke0
, (5)
C =[1 0 0
]. (6)
In this model, taxiing velocity, V , wheel caster length, e,and torsional spring constant, K, are considered as variableparameters. The values of fixed parameters are given in TableI.
TABLE IPARAMETERS OF THE MODEL.
Parameter Value UnitHalf contact length, a 0.1 mMoment of Inertia, Iz 1 kg.m2
Vertical force, Fz 9000 NTorsional damping constant, c, 20 N.m
rad.s
Side force derivative, CFα 20 1rad
Moment derivative, CMα -2 mrad
Tread width moment constant, κ -270 N.m2
radRelaxation length, σ = 3× a 0.3 m
Moment constant, ke 10000 N.mvolt
The landing gear is assumed to taxi along runway witha varying taxiing velocity from 80m/s to 20m/s within 3seconds. It was reported in [10], lower taxiing speed leadsto higher stability and the landing gear becomes stable atthe lower speed of 10 knots (5.144m/s). It is also reportedin [2] that the shimmy vibrations increase with increasedvelocity. Before the aircraft touches down, forward velocityis supposed to be lower than 150 knots (77.2m/s).
In addition, landing gear designers consider the casterlength, e, as a time varying parameter [2], and it is nowtreated as another uncertain parameter which belongs to thefollowing set
e ∈ [0.1, 0.5] . (7)
Also, the torsional spring constant, K, is considered as anuncertain parameter. For this parameter, Gaussian probabilitydistribution with the mean value of 100000N.m/rad and thestandard deviation equals to 8500 is considered.
The vector of time–varying parameters is defined asp(t) = V, e, K ∈ Ω, which is the element of the closedhypercube Ω = [Vm, VM ] × [em, eM ] × [Km,KM ] ⊂ R3.The value of the parameters in Ω are considered as Vm =20, VM = 80, em = 0.1, eM = 0.5, Km = 75000, andKM = 125000.
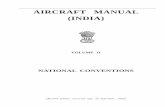
In order to generate the hyper–rectangular N–dimensionalspace grid including the probabilistic uncertain parameter,quasi Monte–Carlo sampling technique [12] is adapted inthis study . This sampling method is known as HammerselySequence Sampling (HSS) and used to generate samples. Toinvestigate the stability and performance of the LPV system,100 samples on each uncertain parameter is generated byHSS, and the open–loop poles of the obtained systems areshown in Fig. 2. The results show that 36 out of 100 systemshave poles on right half plane, it means that the uncertainmodel has 36% unstable plants with respect to considereduncertainties. Also, most of the dominant poles are locatedclose to the imaginary axis that lead to oscillatory behaviorwith large overshoot. Therefore, the designed controllershould provide stable and robust performance.
147
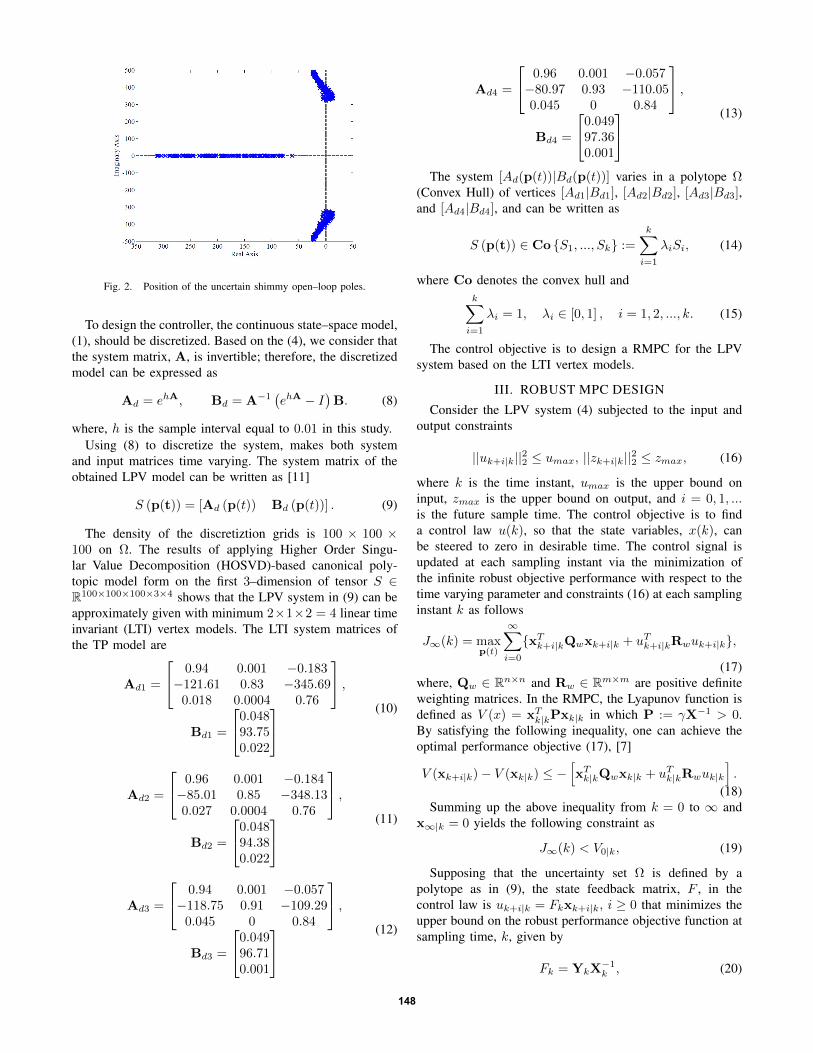
Fig. 2. Position of the uncertain shimmy open–loop poles.
To design the controller, the continuous state–space model,(1), should be discretized. Based on the (4), we consider thatthe system matrix, A, is invertible; therefore, the discretizedmodel can be expressed as
Ad = ehA, Bd = A−1(ehA − I
)B. (8)
where, h is the sample interval equal to 0.01 in this study.Using (8) to discretize the system, makes both system
and input matrices time varying. The system matrix of theobtained LPV model can be written as [11]
S (p(t)) = [Ad (p(t)) Bd (p(t))] . (9)
The density of the discretiztion grids is 100 × 100 ×100 on Ω. The results of applying Higher Order Singu-lar Value Decomposition (HOSVD)-based canonical poly-topic model form on the first 3–dimension of tensor S ∈R100×100×100×3×4 shows that the LPV system in (9) can beapproximately given with minimum 2×1×2 = 4 linear timeinvariant (LTI) vertex models. The LTI system matrices ofthe TP model are
Ad1 =
0.94 0.001 −0.183−121.61 0.83 −345.69
0.018 0.0004 0.76
,Bd1 =
0.04893.750.022
(10)
Ad2 =
0.96 0.001 −0.184−85.01 0.85 −348.130.027 0.0004 0.76
,Bd2 =
0.04894.380.022
(11)
Ad3 =
0.94 0.001 −0.057−118.75 0.91 −109.29
0.045 0 0.84
,Bd3 =
0.04996.710.001
(12)
Ad4 =
0.96 0.001 −0.057−80.97 0.93 −110.050.045 0 0.84
,Bd4 =
0.04997.360.001
(13)
The system [Ad(p(t))|Bd(p(t))] varies in a polytope Ω(Convex Hull) of vertices [Ad1|Bd1], [Ad2|Bd2], [Ad3|Bd3],and [Ad4|Bd4], and can be written as
S (p(t)) ∈ Co S1, ..., Sk :=
k∑i=1
λiSi, (14)
where Co denotes the convex hull andk∑i=1
λi = 1, λi ∈ [0, 1] , i = 1, 2, ..., k. (15)
The control objective is to design a RMPC for the LPVsystem based on the LTI vertex models.
III. ROBUST MPC DESIGN
Consider the LPV system (4) subjected to the input andoutput constraints
||uk+i|k||22 ≤ umax, ||zk+i|k||22 ≤ zmax, (16)
where k is the time instant, umax is the upper bound oninput, zmax is the upper bound on output, and i = 0, 1, ...is the future sample time. The control objective is to finda control law u(k), so that the state variables, x(k), canbe steered to zero in desirable time. The control signal isupdated at each sampling instant via the minimization ofthe infinite robust objective performance with respect to thetime varying parameter and constraints (16) at each samplinginstant k as follows
J∞(k) = maxp(t)
∞∑i=0
xTk+i|kQwxk+i|k + uTk+i|kRwuk+i|k,
(17)where, Qw ∈ Rn×n and Rw ∈ Rm×m are positive definiteweighting matrices. In the RMPC, the Lyapunov function isdefined as V (x) = xTk|kPxk|k in which P := γX−1 > 0.By satisfying the following inequality, one can achieve theoptimal performance objective (17), [7]
V (xk+i|k)− V (xk|k) ≤ −[xTk|kQwxk|k + uTk|kRwuk|k
].
(18)Summing up the above inequality from k = 0 to ∞ and
x∞|k = 0 yields the following constraint as
J∞(k) < V0|k, (19)
Supposing that the uncertainty set Ω is defined by apolytope as in (9), the state feedback matrix, F , in thecontrol law is uk+i|k = Fkxk+i|k, i ≥ 0 that minimizes theupper bound on the robust performance objective function atsampling time, k, given by
Fk = YkX−1k , (20)
148

where Xk > 0 and Yk are obtained from the solution of thefollowing linear objective minimization problem [7]
minγ,Xk,Yk
γ (21)
subject to[1 xTkxk Xk
]≥ 0, (22)
Xk ∗ ∗ ∗
AjXk + BjYk Xk ∗ ∗Q
1/2w Xk 0 γI ∗
R1/2w Yk 0 0 γI
≥ 0, (23)
[u2max Yk
YTk Xk
]≥ 0, (24)
[z2maxXk CT (AjXk + BjYk)T
(AjXk + BjYk)C z2maxI
]≥ 0, (25)
where, the output matrix, C, is common for all vertexes,and j = 1, 2, ..., L (L is the number of vertexes). Also, thesymbol ∗ represents a symmetric structure in LMIs.
Under the above designed closed–loop feedback law, thesolution of the optimization in (21) can be obtained usingLMI technique, which results in stabilizing the LPV system(9) and the state variables are steered to zero. At eachsampling time, an optimal upper bound on the worst caseperformance cost over the infinite horizon is obtained byforcing a quadratic function of the state to decrease by atleast the amount of the worst case performance cost at eachprediction time. Such on–line step–by–step optimization canlead to asymptotically stable evolution. But for the real-timeapplication especially for the shimmy suppression in thelanding gear system, the computational efficiency of LMIis very critical to guarantee the practical implementation ofRMPC [11]. To improve the computational efficiency, weneed to sacrifice the optimal performance to the computa-tional load at each step.
In order to alleviate the computational load in RMPC,an attempt is made to reduce the dimension of matrices inLMI Eqs. (22) to (25). Inequality (23) involves the mostcomputational load since it has to be satisfied by every vertex[Aj , Bj ]. It is found that the matrices in rows 3 and 4 ininequality (23) are directly related to the robust performanceindex which appears at the right hand side of inequality (18).The modified RMPC will trade the optimal performance withthe computational load [10].
In order to accomplish the above, a Lyapunov functionV (x) = xTk|kPkxk|k is defined where Pk := βX−1k is apositive definite matrix, which will be obtained by solvingthe optimal problem at current time, k. In order to guaranteethe asymptotic stability of the closed-loop system, we mustdefine a Lyapunov function for the closed–loop system thatis strictly decreasing:
V (xk+1|k+1)− V (xk|k) < 0, (26)
which is equivalent to the following inequality
xTk+1|k+1Pkxk+1|k+1 − xTk|kPkxk|k < 0, (27)
where the measured state variables at time k+1 are assumedto be equal to the predicted state variables xk+1|k. In order toguarantee that inequality (27) holds, the following inequalitymust be ensured
xTk+1|k+1Pk+1xk+1|k+1 < xTk+1|k+1Pkxk+1|k+1. (28)
by using the definition of Pk, we can write the inequality interms of Xk+1 and Xk
xTk+1|k+1βXk+1xk+1|k+1 < xTk+1|k+1βXkxk+1|k+1. (29)
The RMPC is designed to make the matrix X−1k+1 at timek + 1 to be smaller than X−1k at time k. This is equivalentto the case where the matrix X−1k is smaller than the matrixX−1k−1. It can be written in the following form by adding anupper bound βI to matrix Xk
Xk−1 < Xk < βI. (30)
Furthermore, to guarantee that inequality (27) is satisfied,the right hand side of inequality (28) needs to satisfy thefollowing inequality
xTk+1|k+1Pkxk+1|k+1 = xTk+1|kβX−1k xk+1|k
≤ xk|kβX−1k xk|k.
(31)
Substituting xk+1|k = A(p)xk|k + B(p)uk and feedbackcontrol uk = Fkxk|k into the above inequality leads to
xTk|k(A(p) + B(p)Fk)TβX−1k (A(p) + B(p)Fk)xk|k−xTk|kβX
−1k xk+1|k+1 ≤ 0.
(32)Using the definition of feedback control gain in (20), we
have the following inequalityL∑j=1
(λjAj + λjBjYkX−1k )T
βX−1k
L∑j=1
(λjAj + λjBjYkX−1k )− βX−1k ≤ 0.
(33)
Therefore, the above inequality holds if the following Linequalities hold
[Xk (Aj + BjYk)T
Aj + BjYk Xk
]≤ 0, j = 1, 2, ..., L. (34)
In summary, the modified RMPC [10] for LPV system (9)subjected to the input and output constraints is posed as thefollowing minimization problem.
minβ,Xk,Yk
β (35)
subject to[Xk (Aj + BjYk)T
Aj + BjYk Xk
]≥ 0, (36)
Xk−1 < Xk < βI, (37)
149
[u2max Yk
YTk Xk
]≥ 0, (38)[
z2maxXk CT (Aj + BjYk)T
Aj + BjYk z2maxI
]≥ 0. (39)
The feedback control gain is obtained as F (k) =YkX
−1k and the control signal is calculated as uk+i|k =
F (k)xk+i|k, i ≥ 0. The detailed step by step control algo-rithms are summarized as bellow.
The algorithm of the modified RMPC: Given an initialstate x0, the controller for LPV system is implemented as
1) For k = 0 compute X0 and Y0 by minimizing problemsolving (21). Subjected to (22) to (25) with initialcondition x0, input umax and output constraints zmax,save the corresponding X0, Y0.
2) for k = 1 find Yk and Xk by solving minimizationproblem (35), subjected to (36) to (39), calculate thefeedback gain as F (k) = YkX
−1k and control input as
uk = F (k)xk3) Apply the control input u(k) to the LPV system, and
k = k + 1 then go to 2.As given above, the algorithm starts with solving the time–
consuming minimization problem subjected to LMIs (22) to(25) before the iteration and then switches to the modifiedRMPC [10]. The optimization problem outside the loop issolved to obtain the initial X0 which will serve as the lowerbound of next step X1 in the loop. In each step, the matrixXk is solved and used for feedback gain F (k) computation.The step–by–step optimization of above problem can lead toasymptotically stable evolution.
The proposed algorithm is based on RMPC and invariantellipsoid concept [7]. In step 1, the upper bound (γ0) ofLyapunov function for the initial state variables x0 is mini-mized and the inequality xT0 P0x0 ≤ γ0 is held. The obtainedsubset of state space x ∈ Rn, ε = x|xTX−10 x ≤ 1becomes invariant ellipsoidal set of state variables. And γ0also becomes the upper bound of Lyapunov function forsystem (9) by solving the proposed optimization problemin Step 2.
According to LMI optimization theory [14] the fastestInterior Point algorithm’s computational effort grows withN × J3; where N is the total row size of LMIs andJ is the total number of decision variables. Consider theminimization problem (35), the total row size of LMIs (36)to (39) has been reduced compared with that of LMIs (22)to (25) in each iteration. Thus the computational load issignificantly reduced.
In summary, consider the LPV system (9) with[A(p)|B(p)] varying in a polytope (Convex Hull) of vertices[A1|B1], [A2|B2], ..., [AL|BL]. Assume that the system issubjected to input and output constraints (16). The statefeedback matrix F (k) in the control law uk = F (k)xkis given by F (k) = YX−1k , where Xk > 0 and Y areobtained from the solution of the linear objective minimiza-tion problem (35) subjected to LMIs (36) to (39). Thenthe obtained control law robustly stabilizes the closed-loopsystem asymptotically.
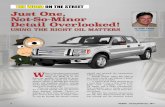
Fig. 3. Yaw angle (rad) in taxiing.
Fig. 4. Lateral deflection (m).
IV. SIMULATION RESULTS
The proposed RMPC algorithm is applied in linear landinggear model. The objective of shimmy control is to asymptot-ically suppress yaw vibration with low overshoot and shortsettling time during landing process and to robustly stabilize.
In order to design the controller, the control input andoutput constraints are considered as 2.5 volt and 1 rad, re-spectively. The initial conditions for the state is [ψ, ψ, y]T =[1, 0, 0.05]T . Also, weight matrices for the robust MPC arechosen as Qw = I3×3 and Rw = 1. In shimmy controldesign, all involved LMIs are effectively solved by Matlab+ YALMIP Toolbox [15].
The simulation results are shown in Figs. 3, 4, and 5. It canbe seen that both yaw angle and lateral deflection approachto zero less than 0.15 sec. The landing gear body shouldnot have large shimmy, and the shimmy oscillations shoulddissipate as quickly as possible; therefore, the designedcontroller demonstrates promising performance and robuststability in the presence of uncertainties. Also, the resultsfrom ref. [10] are shown in Figs. 3 and 4. It can be seen thatthe state convergence are same in this study and [10]. In thisstudy TP model is used to find the LTI systems with threevarying–parameters; however, in [10] only taxiing velocitywas considered as the varying–parameter.
In order to investigate robustness of the proposed method,the system is subjected to external disturbance. In this study,0.2 volt step disturbance on the input is considered at time0.1 sec, which lasts for 100 steps. The simulation results areshown in Figs. 6, 7, and 8. It is evident that the controller
150
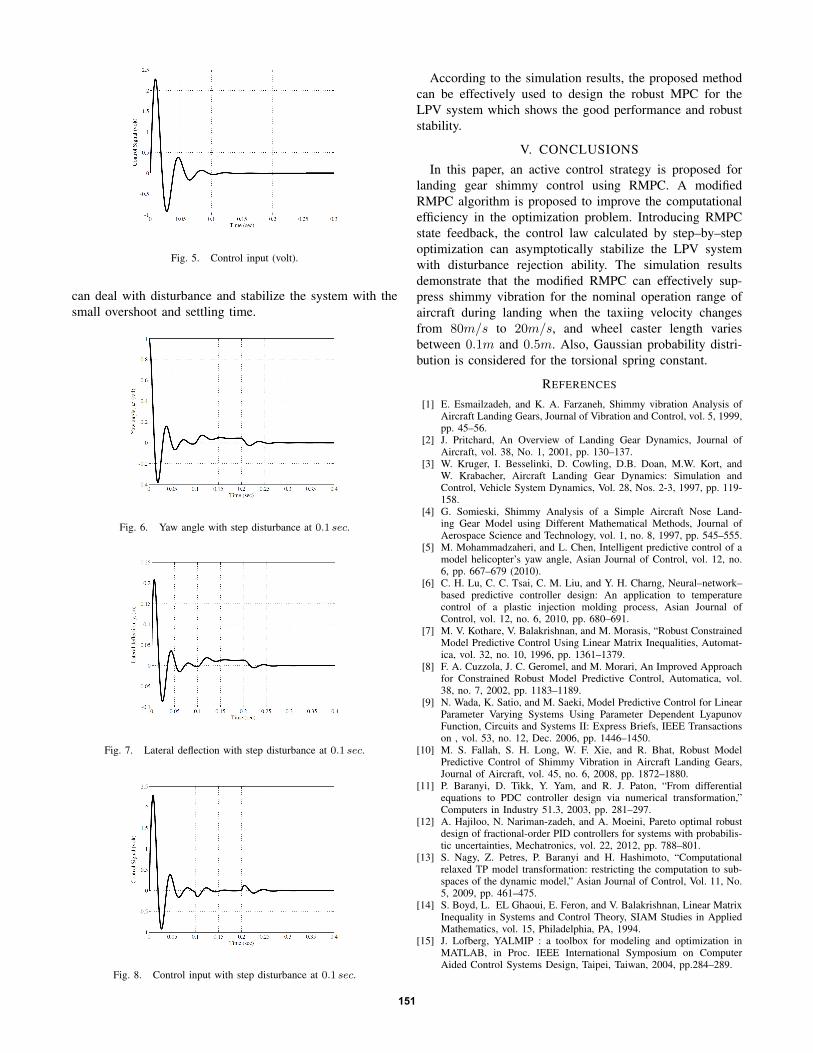
Fig. 5. Control input (volt).
can deal with disturbance and stabilize the system with thesmall overshoot and settling time.
Fig. 6. Yaw angle with step disturbance at 0.1 sec.
Fig. 7. Lateral deflection with step disturbance at 0.1 sec.
Fig. 8. Control input with step disturbance at 0.1 sec.
According to the simulation results, the proposed methodcan be effectively used to design the robust MPC for theLPV system which shows the good performance and robuststability.
V. CONCLUSIONSIn this paper, an active control strategy is proposed for
landing gear shimmy control using RMPC. A modifiedRMPC algorithm is proposed to improve the computationalefficiency in the optimization problem. Introducing RMPCstate feedback, the control law calculated by step–by–stepoptimization can asymptotically stabilize the LPV systemwith disturbance rejection ability. The simulation resultsdemonstrate that the modified RMPC can effectively sup-press shimmy vibration for the nominal operation range ofaircraft during landing when the taxiing velocity changesfrom 80m/s to 20m/s, and wheel caster length variesbetween 0.1m and 0.5m. Also, Gaussian probability distri-bution is considered for the torsional spring constant.
REFERENCES
[1] E. Esmailzadeh, and K. A. Farzaneh, Shimmy vibration Analysis ofAircraft Landing Gears, Journal of Vibration and Control, vol. 5, 1999,pp. 45–56.
[2] J. Pritchard, An Overview of Landing Gear Dynamics, Journal ofAircraft, vol. 38, No. 1, 2001, pp. 130–137.
[3] W. Kruger, I. Besselinki, D. Cowling, D.B. Doan, M.W. Kort, andW. Krabacher, Aircraft Landing Gear Dynamics: Simulation andControl, Vehicle System Dynamics, Vol. 28, Nos. 2-3, 1997, pp. 119-158.
[4] G. Somieski, Shimmy Analysis of a Simple Aircraft Nose Land-ing Gear Model using Different Mathematical Methods, Journal ofAerospace Science and Technology, vol. 1, no. 8, 1997, pp. 545–555.
[5] M. Mohammadzaheri, and L. Chen, Intelligent predictive control of amodel helicopter’s yaw angle, Asian Journal of Control, vol. 12, no.6, pp. 667–679 (2010).
[6] C. H. Lu, C. C. Tsai, C. M. Liu, and Y. H. Charng, Neural–network–based predictive controller design: An application to temperaturecontrol of a plastic injection molding process, Asian Journal ofControl, vol. 12, no. 6, 2010, pp. 680–691.
[7] M. V. Kothare, V. Balakrishnan, and M. Morasis, “Robust ConstrainedModel Predictive Control Using Linear Matrix Inequalities, Automat-ica, vol. 32, no. 10, 1996, pp. 1361–1379.
[8] F. A. Cuzzola, J. C. Geromel, and M. Morari, An Improved Approachfor Constrained Robust Model Predictive Control, Automatica, vol.38, no. 7, 2002, pp. 1183–1189.
[9] N. Wada, K. Satio, and M. Saeki, Model Predictive Control for LinearParameter Varying Systems Using Parameter Dependent LyapunovFunction, Circuits and Systems II: Express Briefs, IEEE Transactionson , vol. 53, no. 12, Dec. 2006, pp. 1446–1450.
[10] M. S. Fallah, S. H. Long, W. F. Xie, and R. Bhat, Robust ModelPredictive Control of Shimmy Vibration in Aircraft Landing Gears,Journal of Aircraft, vol. 45, no. 6, 2008, pp. 1872–1880.
[11] P. Baranyi, D. Tikk, Y. Yam, and R. J. Paton, “From differentialequations to PDC controller design via numerical transformation,”Computers in Industry 51.3, 2003, pp. 281–297.
[12] A. Hajiloo, N. Nariman-zadeh, and A. Moeini, Pareto optimal robustdesign of fractional-order PID controllers for systems with probabilis-tic uncertainties, Mechatronics, vol. 22, 2012, pp. 788–801.
[13] S. Nagy, Z. Petres, P. Baranyi and H. Hashimoto, “Computationalrelaxed TP model transformation: restricting the computation to sub-spaces of the dynamic model,” Asian Journal of Control, Vol. 11, No.5, 2009, pp. 461–475.
[14] S. Boyd, L. EL Ghaoui, E. Feron, and V. Balakrishnan, Linear MatrixInequality in Systems and Control Theory, SIAM Studies in AppliedMathematics, vol. 15, Philadelphia, PA, 1994.
[15] J. Lofberg, YALMIP : a toolbox for modeling and optimization inMATLAB, in Proc. IEEE International Symposium on ComputerAided Control Systems Design, Taipei, Taiwan, 2004, pp.284–289.
151
Copyright © 2022 FDOKUMEN