Radiation Hardness of CMOS detector prototypes for ATLAS ...
Upload
independentCategory
view
1download
0
1
RoboEduc: A Software for Teaching Robotics toTechnological Excluded Children Using LEGO
PrototypesDennis Barrios-Aranibar∗, Viviane Gurgel∗, Marcela Santos∗, Gianna R. Araujo∗, Valber C. Roza∗,
Rafaella A. Nascimento∗, Alzira F. Silva∗, Akynara R. S. Silva† and Luiz M. G. Goncalves∗∗Department of Computing Engineering and Automation
Federal University of Rio Grande do NorteLagoa Nova 59.072-970 - Natal - RN - Brazil
Email:{dennis,vivi,marcela,gianna,valber,rafaella,arizla,lmarcos}@dca.ufrn.br†Department of Education
Federal University of Rio Grande do NorteLagoa Nova 59.072-970 - Natal - RN - Brazil
Email: [email protected]
Abstract— In this work, we describe our project for developingan educational software to be used in the implementation of anew paradigm of digital inclusion. The proposed software allowspeople with no previous knowledge in robotics to control andprogram LEGO prototypes. It is a new kind of educational soft-ware for robotics, mainly pointed to teach basic computer skillsand basic robotics concepts to children at elementary school.In contrast, projects involving digital inclusion are stronglypointed to the use of computers and internet. Robots have agreater potential to be accepted by people in comparison withcomputers then it could be added in digital inclusion projects in asimple fashion. Thus, software for teaching to control, programand use these robots is necessary. Software for programmingLEGO robots is not easy to understand and use. Then, theproposed software represents a good option for teaching roboticswhen working with children and people not familiarized withtechnology. We show experimental results in which digitallyexcluded children accept in a natural way technologies involvingcomputers and robots by using the proposed software.
Index Terms— Digital Inclusion, Educational Software, RobotProgramming, LEGO Robot, Educational Robotics
I. INTRODUCTION
When talking about inclusion, people refer to diminish thequantity of excluded ones. Excluded are conceptualized asthose who are unable to fully participate in the wider social andeconomical spheres due to a variety of social issues, includingunemployment, lack of literacy, disability, etc. [1]. Digitaland technological excluded are people that have no accessto technologies, especially information technologies. With theincreasing social and economic importance of informationtechnology, it is important to make projects that diminishesthe digital and technological exclusion and that accelerate theintroduction of the digital culture process, showing to peopleothers ways to interact with the world. In addition, severalprojects in digital inclusion aim to give people a minimum
1-4244-0537-8/06/$20.00 C2006 IEEE
of digital culture so that government and companies programscan be executed in a more simplified way, as for example,social programs control through cards, obtaining consults,security founding (as FGTS) balance verification, automatedteller machines (ATMs), consults, etc. Yet, the digital inclusionproblem can be treated using other forms like the use of digitalTV for new interaction of people with technology. [2].
There is a wide concern to diminishes the digital exclusionin the world [1], [3], [4], [5], [6], [7], [8], [9]. Projectsinvolving digital inclusion are strongly pointed to ”using com-puters and internet”. It has been made with the introductionof computers in lecture rooms, mobile stations (buss withcomputers and networking resources) in the peripheries ofcities, and access points to internet in key places (stations,shopping and supermarkets). These kind of projects are veryimportant to accelerate the introduction of the digital cultureprocess, showing to people others ways to interact with theworld.
The digital exclusion map in Brazil, presented by theGetulio Vargas Foundation in 2003 [10], shows only informa-tion about the percentage of use of computers and internetin Brazil. In these terms, it shows that the most excludedpeople are concentrated in the peripheries of the cities. Alsoit shows that children from first to fourth grades are moredigitally excluded than children from fifth to eighth grades andthe last are more excluded than children of middle education.Besides, the children without computers have less performancein mathematics in comparison with those that have one or morecomputers. We conjecture that this situation is seemed in otherdeveloping countries.
When thinking about using robots to accomplish goals ofdigital inclusion, it is important that the used form reflectsthe goals of digital inclusion, because when teaching robotics,learners are learning basic skills in computing too.
It is concluded that when teaching robotics, learners arebecoming capable of interacting with information technologies
1 193

2
and digital technology in general. In this sense, becausedigital inclusion aims to make people capable of interactingwith information technologies and digital technology, it wasproposed to implement digital inclusion using robots.
Moreover, as robots are not simple devices, it is necessaryto simplify this context. LEGO Mindstorm kits are simple tomanipulate and are didactic. Thus, they become a good optionfor teaching robotics to excluded people. In this sense, we pro-pose to implement digital inclusion using LEGO Mindstormrobotics kits.
LEGO Mindstorm are considered didactic because, involvesthe question of ”playful” because we are working with chil-dren; the fact of ”playing” turns it into a significant tool inthe knowledge acquisition process. In this sense, children willhave the possibility of create their own ”toy”, thus exploitingtheir imagination, creativity and capacity for doing team work.Another important question is the fact of the ”mistake”. Whenchildren are constructing robots, if they make a mistake,putting a part that doesn’t fit into the robot, they will notsee this mistake as a discourage for learning, as is reasonableto occur in a traditional classroom. In robotics workshops the”mistake” is different, this is a challenge, an stimulus, so thatthe children develop their activities in the best possible way,the learning process becomes thus challenging, productive andsignificant.
As shown in the digital exclusion map in Brazil [10],children from first to fourth grades are the most digitallyexcluded, and the most excluded people is concentrated inperipheries of the cities. For these reasons, our project ofdigital inclusion works with schools of the peripheries of thecities and especially with children from first to fourth grades.
We have chosen the Ascendino de Almeida municipal school(in Natal, Rio Grande do Norte, Brazil) to be the first schoolin this project. We work with children from third to fourthgrades and from 4 different classes. We start working withthem using LEGO Mindstorm robots.
For accomplishing goals in this project we use several toolslike LEGO Mindstorm kits, computers with programs forrobots that make simple tasks autonomously and our softwarefor teaching robotics to people with no previous knowledgein computing and robotics. This educational software is calledRoboEduc and it allows programming and remote control ofLEGO prototypes.
In this paper we describe the development of the main toolused in this project - our educational software: “RoboEduc”.It is provided with a “friendly” user interface that allowslaypersons interact with computers and robots in a fashionway. The implementation of this software will bring severalbenefits in the robotics field, because it allows that laypersonslearn robotics in an easy and interactive way. Furthermore,when used with digital excluded, because its interactive userinterfaces, it can be used to teach basic concepts of computing.After users familiarize with these concepts the program allowshim to learn concepts of programming.
There are several tools (free and commercial) for program-ming robots. All of them are intended for people with a greatknowledge in computing and with at least basic conceptsin robotics. For example, when talking about programming
languages for LEGO Mindstorms[11], the brickOS [12] andthe NQC [13] languages are based in the C programminglanguage and are not easy for laypersons. The same occurswith the lejOS [14] programming language based in javaprogramming language. The simplest available commerciallyis the Robolab that comes with LEGO Mindstorm kits anduses the LabVIEW graphical programming language, but itrequires some knowledge and understand of the functionalitiesof the robot. By our experience with children we notice thatthis concepts are not easy to them, then they require a newlevel of abstraction that brings them a way to understandfunctionalities of robots and parts of them like motors, sensors,etc. and of course a new level of abstraction for programmingconcepts.
There exist several projects for developing environmentsfor teaching robotics like the environment for programmingmobile robots through internet proposed by Sergio Salazaret. al.[15], the Yampa Functional Reactive Programming Lan-guage based on Haskell for programming mobile robots pro-posed by Paul Hudak et. al.[16] and others but all of themrequires some knowledge in robotics, physics or the specificlanguage used by authors.
The software proposed in this paper includes a methodologyto make the learning of basic concepts of programming androbotics easiest. The methodology includes repetitive and in-cremental steps of controlling and programming robots. First,learners have to control the prototype by using a simple userinterface, then, when they are familiarized with functionalitiesof the prototype, the use the same buttons for programmingthe robot (e.g. “turn left” button or “open gripper” button).Software will also allow saving behavior of the robot whencontrolled by students, they can repeat it and also translate toa set of instructions in the basic programming level. Also theprogram will allow translation of instructions between levels,thus, user can translate the program made in the basic level(level where instructions are passed to robot throw buttonsrepresenting it functionalities) to the intermediate level (levelwhere instructions are graphical representations of elements inthe robot like motors, sensors, etc.).
In this paper, we will show the importance of using thisprogram to implement digital inclusion using robots. Alsowe will explain the software project using UML diagrams.The tools used in the implementation are C++ programminglanguage, QT library, BrickOS operating system and C/C++based Language and OpenGL library. Finally we will explainhow the software was used in the municipal school Ascendinode Almeida in Natal-RN and the experiments realized in therelated school.
II. METHODOLOGY FOR TEACHING ROBOTICS TO DIGITALEXCLUDED
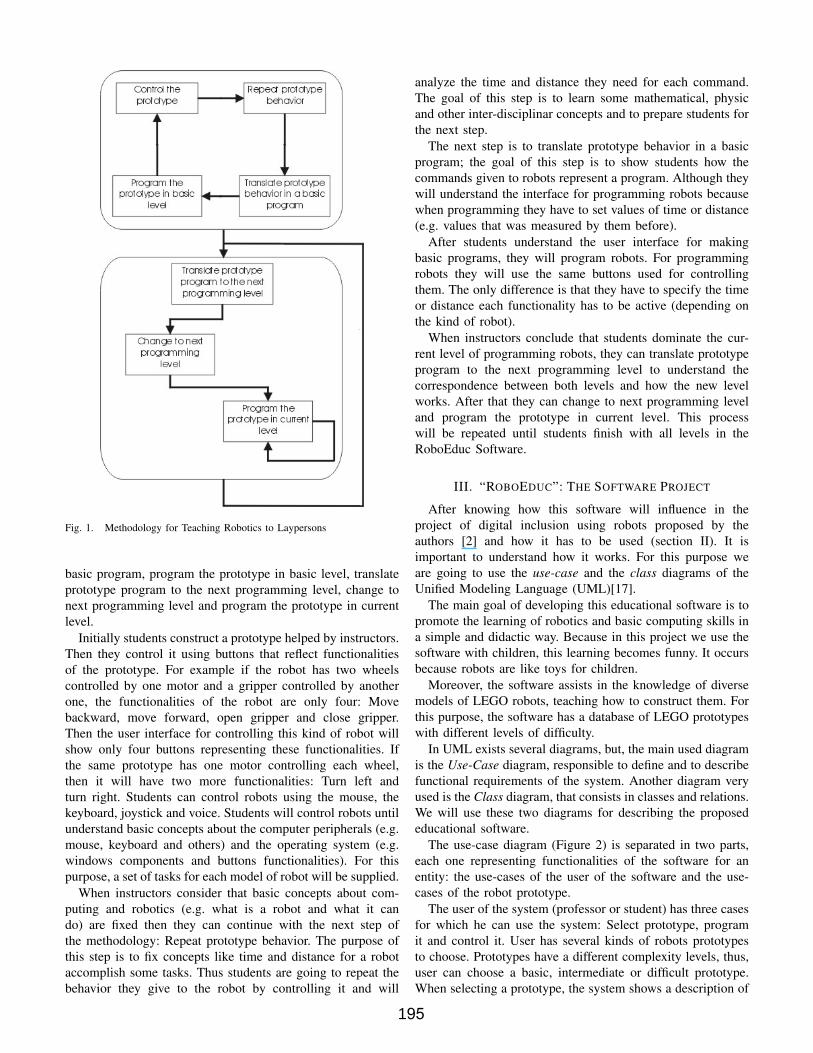
We previously explain the importance of the digital inclu-sion in our society and why the robotics becomes easier thelearning. Authors bring a more detailed explanation in [2].The software proposed in this paper includes a methodologyfor teaching robotics to laypersons (figure 1).
This methodology includes 7 steps: Control the prototype,repeat prototype behavior, translate prototype behavior in a
194
3
Fig. 1. Methodology for Teaching Robotics to Laypersons
basic program, program the prototype in basic level, translateprototype program to the next programming level, change tonext programming level and program the prototype in currentlevel.
Initially students construct a prototype helped by instructors.Then they control it using buttons that reflect functionalitiesof the prototype. For example if the robot has two wheelscontrolled by one motor and a gripper controlled by anotherone, the functionalities of the robot are only four: Movebackward, move forward, open gripper and close gripper.Then the user interface for controlling this kind of robot willshow only four buttons representing these functionalities. Ifthe same prototype has one motor controlling each wheel,then it will have two more functionalities: Turn left andturn right. Students can control robots using the mouse, thekeyboard, joystick and voice. Students will control robots untilunderstand basic concepts about the computer peripherals (e.g.mouse, keyboard and others) and the operating system (e.g.windows components and buttons functionalities). For thispurpose, a set of tasks for each model of robot will be supplied.
When instructors consider that basic concepts about com-puting and robotics (e.g. what is a robot and what it cando) are fixed then they can continue with the next step ofthe methodology: Repeat prototype behavior. The purpose ofthis step is to fix concepts like time and distance for a robotaccomplish some tasks. Thus students are going to repeat thebehavior they give to the robot by controlling it and will
analyze the time and distance they need for each command.The goal of this step is to learn some mathematical, physicand other inter-disciplinar concepts and to prepare students forthe next step.
The next step is to translate prototype behavior in a basicprogram; the goal of this step is to show students how thecommands given to robots represent a program. Although theywill understand the interface for programming robots becausewhen programming they have to set values of time or distance(e.g. values that was measured by them before).
After students understand the user interface for makingbasic programs, they will program robots. For programmingrobots they will use the same buttons used for controllingthem. The only difference is that they have to specify the timeor distance each functionality has to be active (depending onthe kind of robot).
When instructors conclude that students dominate the cur-rent level of programming robots, they can translate prototypeprogram to the next programming level to understand thecorrespondence between both levels and how the new levelworks. After that they can change to next programming leveland program the prototype in current level. This processwill be repeated until students finish with all levels in theRoboEduc Software.
III. “ROBOEDUC”: THE SOFTWARE PROJECT
After knowing how this software will influence in theproject of digital inclusion using robots proposed by theauthors [2] and how it has to be used (section II). It isimportant to understand how it works. For this purpose weare going to use the use-case and the class diagrams of theUnified Modeling Language (UML)[17].
The main goal of developing this educational software is topromote the learning of robotics and basic computing skills ina simple and didactic way. Because in this project we use thesoftware with children, this learning becomes funny. It occursbecause robots are like toys for children.
Moreover, the software assists in the knowledge of diversemodels of LEGO robots, teaching how to construct them. Forthis purpose, the software has a database of LEGO prototypeswith different levels of difficulty.
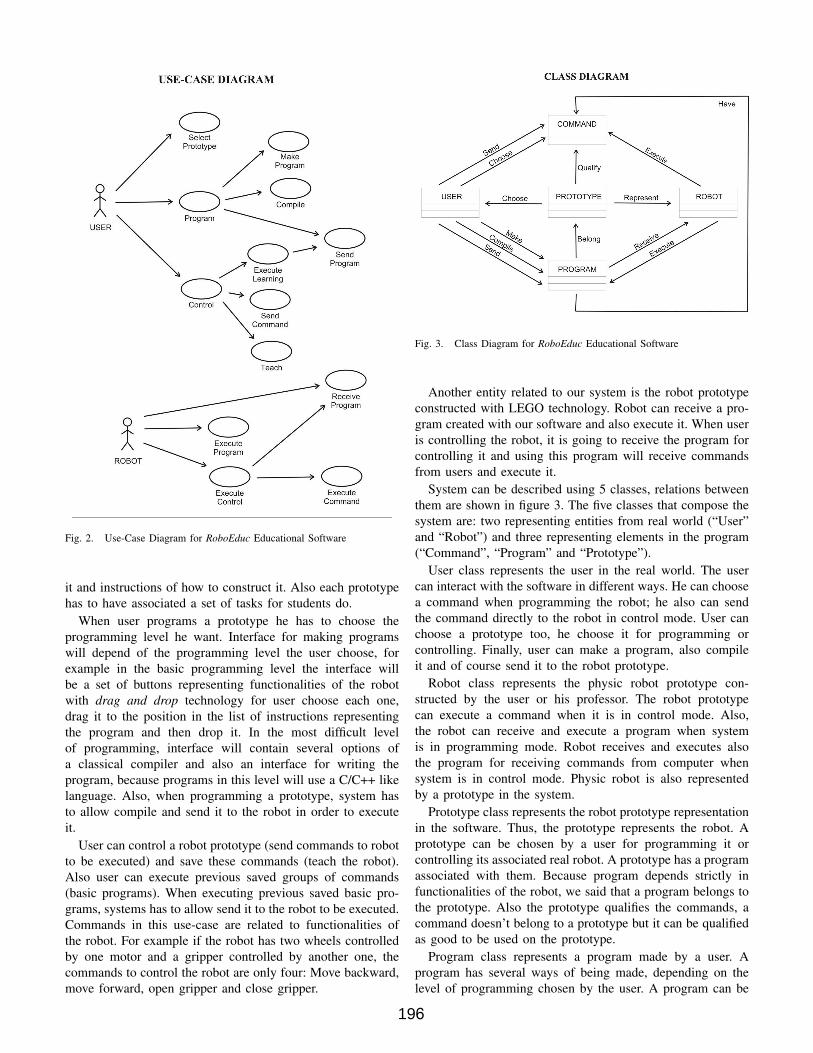
In UML exists several diagrams, but, the main used diagramis the Use-Case diagram, responsible to define and to describefunctional requirements of the system. Another diagram veryused is the Class diagram, that consists in classes and relations.We will use these two diagrams for describing the proposededucational software.
The use-case diagram (Figure 2) is separated in two parts,each one representing functionalities of the software for anentity: the use-cases of the user of the software and the use-cases of the robot prototype.
The user of the system (professor or student) has three casesfor which he can use the system: Select prototype, programit and control it. User has several kinds of robots prototypesto choose. Prototypes have a different complexity levels, thus,user can choose a basic, intermediate or difficult prototype.When selecting a prototype, the system shows a description of
3 195
4
Fig. 2. Use-Case Diagram for RoboEduc Educational Software
it and instructions of how to construct it. Also each prototypehas to have associated a set of tasks for students do.
When user programs a prototype he has to choose theprogramming level he want. Interface for making programswill depend of the programming level the user choose, forexample in the basic programming level the interface willbe a set of buttons representing functionalities of the robotwith drag and drop technology for user choose each one,drag it to the position in the list of instructions representingthe program and then drop it. In the most difficult levelof programming, interface will contain several options ofa classical compiler and also an interface for writing theprogram, because programs in this level will use a C/C++ likelanguage. Also, when programming a prototype, system hasto allow compile and send it to the robot in order to executeit.
User can control a robot prototype (send commands to robotto be executed) and save these commands (teach the robot).Also user can execute previous saved groups of commands(basic programs). When executing previous saved basic pro-grams, systems has to allow send it to the robot to be executed.Commands in this use-case are related to functionalities ofthe robot. For example if the robot has two wheels controlledby one motor and a gripper controlled by another one, thecommands to control the robot are only four: Move backward,move forward, open gripper and close gripper.
Fig. 3. Class Diagram for RoboEduc Educational Software
Another entity related to our system is the robot prototypeconstructed with LEGO technology. Robot can receive a pro-gram created with our software and also execute it. When useris controlling the robot, it is going to receive the program forcontrolling it and using this program will receive commandsfrom users and execute it.
System can be described using 5 classes, relations betweenthem are shown in figure 3. The five classes that compose thesystem are: two representing entities from real world (“User”and “Robot”) and three representing elements in the program(“Command”, “Program” and “Prototype”).
User class represents the user in the real world. The usercan interact with the software in different ways. He can choosea command when programming the robot; he also can sendthe command directly to the robot in control mode. User canchoose a prototype too, he choose it for programming orcontrolling. Finally, user can make a program, also compileit and of course send it to the robot prototype.
Robot class represents the physic robot prototype con-structed by the user or his professor. The robot prototypecan execute a command when it is in control mode. Also,the robot can receive and execute a program when systemis in programming mode. Robot receives and executes alsothe program for receiving commands from computer whensystem is in control mode. Physic robot is also representedby a prototype in the system.
Prototype class represents the robot prototype representationin the software. Thus, the prototype represents the robot. Aprototype can be chosen by a user for programming it orcontrolling its associated real robot. A prototype has a programassociated with them. Because program depends strictly infunctionalities of the robot, we said that a program belongs tothe prototype. Also the prototype qualifies the commands, acommand doesn’t belong to a prototype but it can be qualifiedas good to be used on the prototype.
Program class represents a program made by a user. Aprogram has several ways of being made, depending on thelevel of programming chosen by the user. A program can be
1 196

5
made and compiled by a user; also it can be send to the robotto be executed. A program belongs to a prototype becauseinstructions are strictly related to physic characteristics of therobot represented by this prototype. A program is also receivedand executed by a robot. A program has a set of commandsordered in a specific way.
Finally, the command class represents a command that canbe chosen for the user for controlling or programming a robot.A command can be chosen by a user for being a part of aprogram; also it can be send to the robot when system is incontrol mode. A command is qualified by a prototype as goodfor be used with it or not. The command can be executed bythe robot too. Finally it can belong to a certain program.
IV. SOFTWARE IMPLEMENTATION
In the current work, we use LEGO prototypes. Basically,LEGO kits computing part consists of an embedded “small”computer (the RCX) with some capabilities [11]:
• Processor Hitachi, 8 bits word, able to perform instruc-tions and other operations (RISC);
• 32 Kb RAM memory, in which can be loaded the operat-ing system (usually called firmware) and user programs.
• Communication unit consisting of a infra-red port, whichcan be used to transmit and receive data from a host PCor from/to another RCX.
• Six input/output ports, being three for connecting sensorsand another three for connecting motors. The RCX isable to send currents as desired in the user program tothe motors and to read a current level mapping it to adigital (discrete) value. Sensors as light, touch, rotation(encoder), temperature, and pressure are available in themarket.
By using this prototyping platform it is relatively easy tobuild a robot with resources that are enough to make someoneunderstand what a robot is [18].
For the software implementations we construct a graphicalenvironment (user interfaces), using the graphical develop-ment software “QT Designer”[19] and also we developed thebackground implementation using the “C”/“C++” language.Some objects of this software had been developed using thelibrary used to develop applications of graphical computing -OpenGL. We also use BrickOS to implement functions relatedto LEGO prototypes. BrickOS is an alternative operating sys-tem for the Lego Mindstorms RCX Controller. It also providesa C/C++ development environment for RCX programs [12].
The software intends to attend the children at elementaryschool to become easier learning of robotics and basic com-puting concepts. Thus, the software is being developed with afriendly interface to become better the children understandingof it.
Figure 4 shows the main screen of the software. Thisscreen has the functionalities described in the use-case selectprototype.
In this screen, the children choose a robot prototype model,in agreement with a robot construct previously. For con-structions of prototypes children need to be helped by aninstructor. Thus, when the selection is done, the children can
Fig. 4. Main Screen of the software RoboEduc
Fig. 5. Remote Control Screen of the software RoboEduc
go to the program screen or to the control screen. Screenfor chosen functionality of the software will contain only thequalified commands for the robot model previously selected,in accordance with what its physic configuration allows.
The programming screen is related to program use-case.It has a picture that illustrates the prototype chosen andfive different programming levels. Each level has only thequalified functions for the model selected and the commandschange in accordance with the difficulty level to be used forprogramming.
In the four basic programming levels, this screen has framesthat will be filled when the commands will be selected (dragand drop technology or by using text input). In the most
5 197

6
advanced programming level the user use like c/c++ com-mands for programming the robot. Also, in most basic levels,before send the program the system will compile the programin a transparent way for the user. In the most advancedprogramming level will appear more buttons to compile anddebug the program.
The control screen (Figure 5) is related to control use case ofthe system. It has all the qualified commands for the prototypeand works as a remote control. When the user chooses acommand the robot receives the information and executes thiscommand. The control can be made through of a keyboard,a mouse, a joystick, a text command or a voice command.Thus, each button in this window has an associated key inthe keyboard, an associated movement in the joystick and ofcourse a word in text and voice mode. When controlling theprototype, users can also save this commands and the systemwill construct a program automatically.
V. EXPERIMENTAL RESULTS
The main goal of this project is to help digitally excludedchildren to acquire technological knowledge in a natural way.Also we want to explore the multi-disciplinary characteristicof robotics to develop logical reasoning, to increase knowledgeabout mathematic and physics, to increase their concentration,to work in team, to obey rules and to open new perspectivesin relation of their future professional lives.
As said before, practical experiments in this project arebeing done in the Ascendino de Almeida municipal school (inNatal, Rio Grande do Norte, Brazil) with children from thirdto fourth grades. There were chosen 24 children, 12 from thirdgrade and 12 from fourth grade. The group is formed by 12boys and 12 girls. Instructors involved in this project initiallyteach students how to use LEGO Mindstorms kits and howto construct robot prototypes with it. After that, they teach tooperate robot prototypes by using the software described inthis article.
In this sense, project was divided in two stages. In thefirst stage, instructors use robots prototypes built by them,explain the basis of LEGO Mindstorms Kits and teach childrento control it using the proposed software. In this stage alsoinstructors will explain computing and robotics necessaryconcepts. Finally, students will construct their own prototypeshelped by instructors and will control them.
The second stage of the project is reserved basically to pro-gram prototypes and to create more complex robot prototypes.Also, we promote the small competitions between the children.
Since April/2006 were realized little workshops at “As-cendino de Almeida” municipal school (cited previously). Thisproject has about twenty four children divided in four groupsto facilitate the learning. Each group has a monitor to supervisethe children. Every day of experiments, we give the idea tomount a little robot prototype. When the group mounts it, thechildren have freedom to do what they want. They like to“play” with robots because they are like toys for them.
As exposed by authors in [2], professors think that projectslike this are very important in digital inclusion because it hasmore advantages than projects where the problem is treated
Fig. 6. Children use RoboEduc for controlling a little robot prototype
only by teaching computing. They point that there exist a greatexpectation about results of this project. Also was observedthat professors are not familiar to his technologies and it isimportant to extend it to them, in someway. In the other hand,children show be very interested in working whit robots andwe did not observe boredom in them. It was observed thatinstructors (graduate students of Computer Engineering andComputer Science) have students attention all the time. Thisresult is important to observe because professors says thatchildren have problem of concentration.
Figure 6 shows a task of controlling a robot with two wheelsand a gripper. This task was accomplished using the softwareproposed in this paper.
In the experiment, students construct a robot with twomotors and with a gripper. We promote a competition, whichtask was to get the five cups located in stars that were outsideof the biggest hexagon and put them on their respective placein the lesser hexagon (center of the arena). Children controlthe robot through RoboEduc software (version 1.0). Thecommands available were: Move backward, move forward,turn left, turn right, open gripper and close gripper. Each childwas responsible for one cup and since when the control starteduntil put the cup in the respective place, the time was beingwritten on blackboard. When all children had finished, we add
6 198

7
the time of each group. The team that had the lesser time wasthe winner.
Instructors observe a great acceptance of this kind of ex-periments in children. After six months working with them, itwas observed a great increasing in their basic knowledge aboutcomputing and robotics. Also was observed more capacity ofworking in rules and obey rules.
VI. CONCLUSIONS AND FUTURE WORKS
Although robots have been widely applied in education,the goals in those applications are not, in general, for digitalinclusion. Generally they are applied in private schools or inschools with outstanding students. Then we can conjecture thatthe current work is pioneer in this area of digital inclusionin Brazil, mainly, with a municipal school and with reallyexcluded children.
The RoboEduc software has several advantages in relationwith others existing software. The children need to mount therobot and, then, can control it using a computer. Subjectsabout robotics and computing can be presented to studentsat the same time. We program a friendly interface and a newmodel to store the “learned behaviors” for robot, different fromthat existing nowadays. This interface facilitates the learningof basic concepts about programming and robotics, becausetraditional softwares are based on high level programminglanguages.
As methodological contribution, we are proposing anotherway to implement digital inclusion, by using robots addedto computers. Answers obtained in interviews validate theidea that robots have a greater potential to be accepted bypeople in comparison with computers only, and they are a goodoption for implementing projects of digital inclusion. In thisnew methodology the children are able to program the robotseffectively. We observe a great approval from the children tothis software. We perceive that they are really learning basicconcepts of robotics and computing in a natural way.
We conjecture that LEGO Mindstorms are the best optionwhen working with robots and children, because the use ofbricks makes easy to build the mechanical part of a robot,even in the first lessons children have done that. Robots arestill like toys, of course a sophisticated toy, for them and itmakes children be more receptive when instructors explain.This fact helps children to improve their logic reasoning andtheir concentration.
Finally, it is important to note that robots will help childrennot only in terms of digital inclusion, but also in mathematics,physics, and artistic concepts.
In the future, database of robot prototypes in the RoboEduchas to be increased and also an interface for professor increasetheir own prototypes has to be provided. Also it is importantto increase the number of possible tasks available for eachrobot to help instructors.
As perspectives, the next stages of the project are going tobe executed and we plan to extend the project also to otherschools. An idea is to use trained children as instructors forthe other children.
Also we are developing technology for producing artisticperformances (plays) where children and robots will interact
in the same scene. Another future goal in this project is toimplement teleoperation techniques, thus, this software willbe used through internet.
ACKNOWLEDGMENT
The authors would like to thank the CNPq/Brazil (Con-selho Nacional de Desenvolvimento Cientıfico e Tecnologico- Brazil) for supporting this project.
REFERENCES
[1] D. Fitch, “Digital inclusion, social exclusion and retailing: an analysisof data from the 1999 scottish household survey,” in Technology andSociety, 2002. (ISTAS’02). 2002 International Symposium on, Raleigh,North Carolina, USA, 6 2002, pp. 309– 313.
[2] D. Barrios-Aranibar, V. Gurgel, A. Burlamaqui, L. M. G. Goncalvez,M. Santos, G. R. Araujo, V. C. Roza, and R. A. Nascimento, “Techno-logical inclusion using robots,” in Anais do II ENRI - Encontro Nacionalde Robotica Inteligente. Campo Grande, MS, Brazil: XXVI Congressoda Sociedade Brasileira de Computacao - SBC2006, 07 2006.
[3] J. Meer, “Getting on the net: the struggle for digital inclusion of thenavajo,” Technology and Society Magazine, IEEE, vol. 22, no. 1, pp.53–58, Spring 2003.
[4] K. R. Wilson, J. S. Wallin, and C. Reiser, “Social stratification andthe digital divide,” Social Science Computer Review, vol. 21, no. 2, pp.133–143, 2003.
[5] N. Selwyn, “Reconsidering political and popular understandings of thedigital divide,” New Media Society, vol. 6, pp. 341–362, 2004.
[6] S. Willis and B. Tranter, “Beyond the ’digital divide’: Internet diffusionand inequality in australia,” Journal of Sociology, vol. 42, no. 1, pp.43–59, 2006.
[7] A. M. da Silva Filho, “Os tres pilares da inclusao digital,” Revista EspacoAcademico, vol. 3, no. 24, 5 2003.
[8] R. M. Porcaro. (2006, 01) Tecnologias de comunicacao e informacao:polıticas e estrategias de inclusao digital no brasil. IPEA: Instituto dePesquica e Economica Aplicada. Brazil. Last Access in 02/05/2006.[Online]. Available: http://www.ipea.gov.br/
[9] E. Rondelli. (2003, 07) Quatro passos para a inclusao digital. SETEPONTOS - para concretizar a sociedade do conhecimento, vol.01, no. 05. Brazil. Last Access in 30/04/2006. [Online]. Available:http://www.comunicacao.pro.br/setepontos/
[10] R. Bagio. (2003, 04) Mapa da exlusao digital. Getulio VargasFoundation. Brazil. Last Access in 20/04/2006. [Online]. Available:http://www2.fgv.br/ibre/cps/mapa exclusao/apresentacao/apresentacao.htm
[11] “Lego mindstorms,” http://mindstorms.lego.com, 2006, last Access in26/07/2006.
[12] “Brickos operating system and c/c++ development environment for thelego mindstorms rcx controller,” http://brickos.sourceforge.net/, 2006,last Access in 26/07/2006.
[13] “Not quite c language with a c-like syntax for the lego mindstormsrcx controller,” http://bricxcc.sourceforge.net/nqc/, 2006, last Access in26/07/2006.
[14] “Lejos, java for the rcx,” http://lejos.sourceforge.net/index.html, 2006,last Access in 26/07/2006.
[15] S. R. G. Salazar, L. F. Rodrigues, and E. do Valle Simoes, “Ambientede programacao de robos moveis via internet,” in Anais do II ENRI -Encontro Nacional de Robotica Inteligente. Campo Grande, MS, Brazil:XXVI Congresso da Sociedade Brasileira de Computacao - SBC2006,07 2006.
[16] P. Hudak, A. Courtney, H. Nilsson, and J. Peterson, “Arrows, robots,and functional reactive programming,” in Summer School on AdvancedFunctional Programming 2002,Oxford University, ser. Lecture Notes inComputer Science, vol. 2638. Springer-Verlag, 2003, pp. 159–187.
[17] “Unified Modeling Language,” http://www-306.ibm.com/software/rational/uml/, last Access in 26/07/2006.
[18] V. A. Antunes, “Descobrindo o potencial nao explorado da tecnologialego,” Department of Computing Engineering and Automation - FederalUniversity of Rio Grande do Norte, Natal - RN - Brazil, GraduationMonography, 2003.
[19] “Qt - cross-platform c++ development,”http://www.trolltech.com/products/qt/, last Access in 26/07/2006.
199
Copyright © 2022 FDOKUMEN