
Review of Citrus mechanical harvesting
61
CITRUS MECHANICAL HARVESTING Review of Literature Report Ramin Shamshiri PhD candidate, Department of Agricultural and Biological Engineering University of Florida, Gainesville, USA 15 July 2008 Introduction: Minimizing production cost in citrus industry will maximize the profit and keep growers withstand in the competitive market. According to G.K. Brown, if grower still wants to be in business in 20 years, they must convert to mechanical harvesting. Brown states that harvest cost must be reduced to 50% in order to compete with free trade market. The harvesting of citrus fruit represents 35–45% of total production cost (Davey & Lahiff, (1978) and [8]). United State with Florida as the major producer of citrus should be able to compete with low-wage countries (like Brazil) in global market by reducing its harvesting cost and increasing fruit returns (The harvesting cost in Brazil are a fraction of Florida’s, with average $0.38/box with Florida’s average $1.6/box). Mechanical harvesting systems are capable of reducing costs and keep the citrus industry competitive in a global market by minimizing amount of expensive manual labor used. The literature review shows that four major techniques of mechanical harvesting (air shaking, trunk shaking, limb shaking and canopy shaking) are available and have been applied to pick the fruit from trees. Of those, trunk and canopy shaking system have been studied and commercialized more. A comprehensive review on all these systems is done by K.F. Sanders 2005, Orange Harvesting Systems Review.
Transcript of Review of Citrus mechanical harvesting

CITRUS MECHANICAL HARVESTING Review of Literature Report
Ramin Shamshiri PhD candidate, Department of Agricultural and Biological Engineering University of Florida, Gainesville, USA 15 July 2008
Introduction:
Minimizing production cost in citrus industry will maximize the profit and keep
growers withstand in the competitive market. According to G.K. Brown, if grower still wants to be in business in 20 years, they must convert to mechanical harvesting. Brown states that harvest cost must be reduced to 50% in order to compete with free trade market. The harvesting of citrus fruit represents 35–45% of total production cost (Davey & Lahiff, (1978) and [8]). United State with Florida as the major producer of citrus should be able to compete with low-wage countries (like Brazil) in global market by reducing its harvesting cost and increasing fruit returns (The harvesting cost in Brazil are a fraction of Florida’s, with average $0.38/box with Florida’s average $1.6/box). Mechanical harvesting systems are capable of reducing costs and keep the citrus industry competitive in a global market by minimizing amount of expensive manual labor used.
The literature review shows that four major techniques of mechanical
harvesting (air shaking, trunk shaking, limb shaking and canopy shaking) are available and have been applied to pick the fruit from trees. Of those, trunk and canopy shaking system have been studied and commercialized more. A comprehensive review on all these systems is done by K.F. Sanders 2005, Orange Harvesting Systems Review.

Trunk shake harvesters use shaking force on a tree trunk to drop the fruits either on ground (mooboom) to be later picked up by hand or machine or on a catch frame (trunk shake and catch) to be collected in storage case, while canopy shake harvester shake the tree canopy and fruits fall on a frame called catch frame. In both systems, the shaking frequency varies and depends upon the time of year and variety of fruit. Utilization of each system depends on the trees and groves condition. A trunk shake system with catch frame works well for older groves with trees that have short trunks with diameter of greater than 9 inches while a canopy shake and catch system works better for groves with uniform canopy size. For non-uniform tree canopy size groves, a tractor-drawn pull type canopy shakers are the best options. According to Futch and Roka, the efficiency of trunk shake systems is 94 to 97% in fruit removal which recovers between 88 to 95% of the available fruit and their performance is between 90 to 140 trees per hour which make the growers to save 20 to 50 cents per box as compared to growers using conventional harvesting.
Florida is the major producer of citrus in United States. According to USDA, in
1999, the total bearing area was estimated at 315900 ha, of which 245000 ha were assigned to oranges. About 95% of the oranges harvested from this 245000 ha are processed into juice. In 2004, citrus groves encompass 0.304 million ha of Florida’s land and produced 292 million boxes of fruit. The harvested fruit contains trash (sand, wood, leaves and other non-fruit debris). Evaluation of trash removal devices for mechanically harvested oranges was studied by Churchill and Hedden (1974) which represents that the belt type system was highly successful [4] . The processing industry has set a tentative limit of 90 kg of trash per 500 field box load of fruit. G.K. Brown states that harvest cost must be reduced to 50% in order to compete with free trade market. Harvest cost will increase with the decrease in supply of harvest workers. In year 2001-2002, the average cost for harvesting a field box of orange which is around 40kg or 90lb was about $1.75 US and the average harvester productivity is about 410kg per work-hour [2]. Mechanical harvesting systems have been used successfully in Florida citrus groves. These systems reduce harvesting costs, thus allowing the citrus industry to remain competitive in a global juice market. [9]
Mechanical harvesting has been evaluated and commercialized in the Florida
citrus industry since 1958 (Florida Department of Citrus, 2000). Currently, eight citrus mechanical harvesting systems are available for commercial use. They are:
1) Area canopy shake to the ground (Fig.1) 2) Canopy pull and catch (Fig.2) 3) Trunk shake to the ground (Fig.3) 4) Trunk shake and catch (Fig.4) 5) Continuous canopy shake and catch (Fig.5,6) 6) Continuous canopy shake to the ground (Fig.7) 7) Continuous air shake to the ground (Fig.8) 8) Mechanical fruit pickup (Fig.9,10,11) These systems are generally categorized into trunk shakers or canopy shakers.
“Trunk shake harvester shakes a tree trunk to drop the fruits to the ground to be picked by hand or by machine. Trunk shake systems are of two basic types, those which operate with a catch frame system (trunk shake and catch) (Figs. 12, 13, and 14) or systems without the catch frame (monoboom) (Fig. 15) [9] Actual shaking varies from 5 to 12 seconds depending upon the time of year and variety of fruit. Early in the season, when fruit pull-force measures are high, shake times may exceed 10 seconds. This harvesting system removes 94 to 97% of the fruit and recovers between 88 and 95% of the available fruit.” [9]
“Skirting also improves harvest fruit removal and recovery. Tree skirts should
be at least 30 inches above the ground, measured on the bed and at the drip line, to allow the catch frame to easily slip under the tree canopy. [9] The trunk, shake and catch system is limited to trees with trunk diameter less than 10 inches. It is recommended that tree heights do not exceed 16 feet to minimize fruit splitting.” [9]

“One set of trunk shakers can harvest between 90 to 140 trees per hour.
Growers using this system have saved between 20 to 50 cents per box as compared to growers using conventional harvesting systems.” [9]
“Monoboom trunk shake system operates without the catch frame. The
monoboom mechanical harvesting system has greater flexibility operating in groves where the trunk shake and catch systems are not suited due to trunk size, grove design or low-hanging limbs. The monoboom system is well suited for older groves with trees that have short trunks or trunks with a diameter of greater than 9 inches. The monoboom can clamp on to larger limbs if necessary. Seedling trees as high as 25 feet have been harvested with monoboom trunk shakers. Since the machine does not use a catch frame, the fruit is allowed to drop to the ground where a hand crew picks up the fruit and gleans fruit from lower branches. The system can shake between 30 to 100 trees per hour. Harvesting cost savings from using the monoboom system are generally not as great as compared to the trunk, shake and catch system because hand labor is required to pick the fruit from the ground, thereby reducing the cost savings. This system does increase the efficiency of hand labor, however, because more fruit per hour can be gathered by picking it up by hand from the ground than by harvesting it by hand from the tree.” [9]
Canopy shake harvester shakes the tree canopy and drop the fruits on the catch
frame. Utilization of each system depends on the condition of trees and groves. For example, tree age and size, trunk height and skirt height, between-row and in-row spacing, type of hedging and topping, grove floor and bed/swale, irrigation and drainage, and clear headland conditions are some factors which vary in the existing groves [2]. A canopy shake and catch system is best suited for groves with uniform canopy sizes whereas tractor-drawn pull type canopy shakers can work efficiently in non-uniform tree canopy size groves (Futch and Roka, 2005).
“The canopy pull and catch harvesters or the trunk shake and catch harvesters
may increase labor productivity by 5 to 10 times that of hand harvesting. The continuous travel canopy shake and catch harvesters may increase labor productivity by 10 to 20 times that of hand harvesting. Cost savings of 10 to 75% are possible in the future, depending on the type of grove and the appropriate harvesting system. Labor productivity factors of 2 to 20 are also possible in the future. The mechanically harvested production amounted to about 5,000 ha during the 2001-2002 crop season, and is expected to steadily increase. [2]”

Brief History
In mid-1950, Florida department of citrus, USDA and University of Florida
started a mechanical harvested program. Their main objective was to improve labor productivity and reducing harvest workers. Mechanically harvesting has been evaluated and commercialized in the Florida citrus industry since 1958. (Florida Department of Citrus 2000). This research program continued for about 30 years until 1980 that devastating freezes occurred (Kathleen A. Miller 1991). In 1990’s the program was revitalized by department of citrus under administration of Dr.Gale Brown. It was in this time that the trunk shake and catch and the continuous canopy shake and catch was commercialized for citrus production.
From top to bottom, left to right: Area Canopy Shaker for putting fruit on the ground,
Canopy Pull and Catch Harvester, Trunk Shaker ( Monoboom style) for putting fruit on the ground, Trunk Shake and Catch Harvester, Continuous Canopy Shake and Catch
Harvester, Continuous Canopy Shake and Catch Harvester, Continuous Canopy Shaker for putting fruit on the ground, Continuous Air Shaker for putting fruit on the ground,
Direct Fruit Pickup Harvester, Dripline Fruit Rake, Dripline Fruit Pickup

Mechanical citrus harvesting and tree health: A typical concern about mechanical citrus harvesters is their effect on tree
health. Mechanical citrus harvesters can remove leaves, branches together with the mature and immature oranges. Visual injuries caused by mechanical harvesting can include defoliation, twig loss, removal of flowers and young fruit, exposure of roots, and occasionally the removal of some bark (Li and Syvertsen, 2004). Buker et al. (2004) have studied the long-term effects of tree shakers on yield. They found that groves with healthy trees harvested commercially in Florida about 10 years with trunk shakers have not shown any negative effect on yield, however leaf loss and bark injuries to the citrus trees have been found. Major leaf loss up to 50% as a result of mechanical harvesting prior to a freeze may increase freeze damage, but has not resulted in yields reduction. According to this study, in Florida citrus groves where trunk shakers were continuously used to harvest for over 10 years and a small number of roots exposed under trees, yield was not affected. Barking on the trunk can be minimized by using linear direction trunk shakers with proper clamp pads and experienced operators. Canopy shakers can also lead to bark injuries on branches which is sever in the first year of mechanical harvesting. In the subsequence year, branch injury is no worse than ladder damage from hand picking operation.
Left: Bark scuffing caused by trunk shaker, right: Limb breakage and bark scuffing
caused by canopy shaker
Some Statistics
According to USDA, in 1999, the total bearing area was estimated at 315900 ha,
of which 245000 ha were assigned to oranges. About 95% of the oranges harvested from this 245000 ha are processed into juice. In 2004, citrus groves encompass 0.304 million ha of Florida’s land and produced 292 million boxes of fruit.
In the season 1999-2000, about 5500 acres of round oranges were mechanically
harvested primarily with trunk shakers while in the season 2006-2007, canopy shakers have covered 35600 acres of round oranges [1]. Lack in supplying harvest workers increase the harvest cost. According to G. K. Brown, the average cost the average cost for harvesting a field box of orange which is around 40kg or 90lb was about $1.75 US in 2001-2002 and the average harvester productivity is about 410kg per work-hour. According to Whitney 1989, Florida citrus production peaked at 11.2 Mt prior to several damaging freezes of the early 1980s. In 1988, 83% of the harvested citrus were utilized for processing purposes. Whitney 1989 states that 30 years of research and development have not yielded a feasible alternative to manual picking which requires 20,000 labors, however considerable technology has been developed to evaluate the merits of various approaches. After the four freezes between 1981 and 1985, production dropped to 6.4 Mt in the 1985 season, but had recovered to 7-4 Mt in the 1987 season, and bearing area was 207 kha. Harvesting & roadside cost in the 2003-2004 harvest season varied between 1.15$ to 1.6$ per field box depending upon tree preparation, yield and gleaning requirement [1].

According to [3] in 2003 there have been 31 commercial mechanical harvesting systems available from six manufactures and five manufactures working on additional systems. Oranges comprised over 70% of Florida’s citrus production over the past 20 seasons. Florida was the world’s leading producer of oranges until 1978 when Brazil became the leader. During the 1986 season, 82% of the citrus was processed-92% of the oranges, 58% of the grapefruit, and 56% of the specialty fruits.
Performance of mechanical harvesting system, how to enhance
Fritz Roka and Barbara Hyman (2004) evaluated performance of citrus
mechanical harvesting systems in more than 2750 acres with 1.25 million boxes of harvested oranges for the 2003/04 season. They observed that higher yields increase labor and machine productivity measures. An important results of this study is that since the 2000-01 season, removal percentages have remained unchanged for both the trunk-Shake-Catch system (TSC) and Continuous Canopy Shake-Catch (CCSC) systems. “There has been a minor decrease in recovery percentages for both systems. This suggests that the technology for removing and catching fruit has not significantly changed. The major performance improvements have come in the way equipment operators have managed their crews and maintained the equipment. Increasing runtime percentage directly correlates to increasing harvest speed, machine and labor productivity. The FMC trunk-Shake-Catch system (TSC) and Korvan Continuous Canopy Shake-Catch (CCSC) systems showed lower labor and machine productivity measures than observed by Coe-Collier and Oxbo systems, which reflect the average runtime percentage. As FMC and Korvan system gain additional field experience, runtime percentages are expected to increase along with the accompanying performance statistics. “ (The definition of the terms they have used to explain their measurements and observations are attached.)
Grove management
Since Florida’s citrus groves aren’t alike, several considerations should be taken
into account in order for a mechanical harvesting system to work efficient. For example, the trunk, shake and catch system is limited to trees with trunk diameter less than 10 inches and the trees heights should not be exceeded more than 16 feet or it will cause fruit splitting. Trunk spacing also needs to be uniform with clear trunk heights of at least 15 inches above the bud union and groves need to be hedged, topped and skirted. Skirting should be at least 30 inches above the ground. Groves have variable tree sizes, spacing and trunk heights and the biggest challenge of Florida growers concerning mechanical harvesting is overcoming tradition that you can plant groves anyway you want to Said Brown. Good orchard management will maximize benefit from mechanical harvesting.
Tree pruning, hedging and skirting
There are several reasons for citrus trees to be pruned, skirted and hedged (John
Dick, pruning citrus trees) which directly or indirectly increase the yield and ease the process of hand or mechanical harvesting. For instance, side hedging at an angle of 15o to 25 o from the vertical all better access to the lower parts of the canopy. Figure 1.

Figure 1: Hedging [John Dick, pruning citrus trees]
Tree hedging increases the efficiency of most mechanical harvesters. It has been
shown in several studies that hedging does not necessarily result in a significant yield penalty. For instance, the effect of hedging on the productivity of Valencia orange trees was studied by Beuington and P. E. Bacon 1978. It was found that light hedging (0.2-0.3 m of canopy removed from each side of the tree) was effective in restricting tree spread into the inter-row space without adverse effects on yield and the yield loss in the first season was recovered by increased production in the second season after hedging, but more severe hedging caused a significant reduction in cumulative yield. Hedging has no consistent effects on fruit size. According to this study, the effect of hedging on productivity depended on the severity of pruning. In the other words, with sever pruning, the yield loss in the first season will not be fully recovered in the subsequent years and significant reductions in cumulative yield will occur. In contrast to these results, severe hedging has been carried out in older orchards, where the trees were adversely affected by crowding, without loss of production (Moore 1957).
Traditional hand pruning is time taking and labor intensive. With increased
plant density and hedgerow plantings, machine pruning is now becoming more necessary to save time and money. Some of the available equipments are air or hydraulic secateurs on extension poles which can be used to large trees. The working condition and topography of citrus orchards make it very difficult to design and develop an automatic pruning machine which is safe and quality efficient. Therefore most of the current available pruning machineries are still have operator to control the situation and process. Figure 2 shows a hedging machine.
Figure 2: Hedging Machine (John Dick, 2007)
To locate human away from the hazardous environment, Zhang et all (2007)
developed a wireless remote control pruning machine for plantation forest. In this work, a remote control system based on Complex Programmable Logic Device (CPLD) for the pruning machine has been used. The remote controlled automatic pruning machine climbs up the trunk of a tree by spiral movement when working.

This machine is currently being investigated furthermore for potential industrial applications in China. Two major tasks have been covered in the development of the Electro-mechanical interface system; controlling the three directions of the machine, up, down and pause and controlling the three kinds of power supply for the machine, idle, climbing, and pruning. The schematic view of wireless transmission system of automatic pruning system is shown in figure 3. The whole remote control system based on CPLD is employed in the manufactured automatic pruning machine and a series of field tests have been conducted successfully.
Figure 3: The schematic of (a) wireless transmitting system of automatic machine and
(b) The internal logic schematic of CPLD for remote control transmitting system
After each harvesting and pruning cycle, the residuals are usually left or burnt. It
will however promote economical sustainability if these residuals can be processed. Recently the Italian Department of Agricultural and Forestry Engineering (DIAF) has evaluated the possibility of harvesting, shredding and packaging pruning residuals simultaneously (Recchia et al 2008). An innovative machine that harvests, shreds and packages into big bags all pruning residuals, on stony and hilly terrain have been experimented and developed by DIAF and Nobili S.p.A. (Molinella, Bologna, Italy) figure 4.a&b. This machine is partially carried, fitting onto the tractor’s back axle using a three-point linkage; it has a pick-up device that lifts and carries pruning residuals.
Figure 4. (a): Shredding machine NOBILI TRP-RT 145, (b): Test in stony olive grove with not windrowed pruning residuals characterized by high diameter (Recchia et al 2008)
“This shredding machine is able to operate in various conditions: different
terrain types (stony or not, naturally grassy or not), different slopes, different planting layouts. Moreover, the working capacity, measured during experimental trials, does not depend on different slope conditions. The shredding machine is capable of avoiding stones found on the terrain, thus minimizing structural damages. Test performances have demonstrated that only one manual operator is required for harvesting and packaging pruning residuals, thus maintaining working continuity. In addition, the shredding machine has a working capacity that can be compared to that of other commercialized models available and is able to package shredding residuals ready for transport and storage.” (Recchia et al 2008).
“Skirting also improves harvest fruit removal and recovery. Tree skirts should
be at least 30 inches above the ground, measured on the bed and at the drip line, to

allow the catch frame to easily slip under the tree canopy. [9] The trunk, shake and catch system is limited to trees with trunk diameter less than 10 inches. It is recommended that tree heights do not exceed 16 feet to minimize fruit splitting.” [9]
Spraying abscission chemical
Abscission can make mechanical harvesting more efficient by increasing fruit
removal and make harvesting easier and faster. One good advantage of abscission is to make harvesting more selective by only loosening the mature fruit. For example, Valencias have both young developing fruit and mature fruit on the tree. Without abscission the shakers take too much of the developing fruit off the tree, decreasing the next seasons yield.
Several studied have been done to evaluate the effects of abscission in
mechanical harvesting of oranges. According to Hedden et al.(1998) abscission chemical enhanced fruit removal efficiency of trunk shakers by 17 to 26%. Fruit removal efficiency of four trunk shakers under affects of three abscission chemicals on Hamlin and Valencia oranges has been studied by Whitney et al. (2000) and showed that removal efficiency were increased by 10 to 15% while orange detachment forces were reduced by 50 to 80% compared with unsprayed controls. Another studied by Salyani et al. (1988) “effect of volume rate on spray deposition using a copper tracer” showed that volume rate had no significant effect on mean copper deposition, but higher volume rates resulted in more uniform coverage than lower rates. The effect of application time on spray deposition and uniformity was studied by Hoffmann and Salyani (1996). The results showed that night time application leads in more deposition than daytime application.
In another study, spray variable effects on deposition and harvesting efficiency
of CMN-Pyrazole has been considered by Bensalem et al. (2001). The objectives of this study has been to investigate the effects of spray application variables on deposition of an experimental abscission chemical CMN-pyrazole and to evaluate its efficiency in loosening the fruit for mechanical harvesting. Four tests were conducted using 5 CMN-Pyrazole in two commercial orange groves in central and south Florida. The results showed that spray release height had a significant effect on spray deposition along the canopy height, however, deposition at different canopy heights was not proportional to spray delivery rate directed to different heights. In this study, spray release height had significant effects on fruit loosening and removal. According to this research, in general, spray release height have significant effects on fruit removal. Increase in application volume decreases deposition but higher application volume produce better effects on fruit loosening and removal.
For any absicsion chemicals to be effiecient, they should result reduction in fruit
deattachement force (FDF). This parameter is observed to be higher in the tree tops. Therefore deposition and fruit detachement are influenced by relative spray delivery volums along the tree canopy height. For a given spray volume, trunk shaker fruit removal generally increases with deposition according to Bensalem et al. (2001). “With the trunk shaker, fruit removals generally increased with shaker clamp height and smaller trunk circumference” [001].
Bensalem et al. (2001) lists the four major parameters on deposition and fruit
removal potential in abscision application:
Spray rates: different spray rates along the canopy have a significant effect on
deposition but spray depositis at different canopy heights are not proportional to the amounts directed to those levels.

Spray Volume: Spray application volume have significant effect on deposition and low volume results in higher deposition than does the volume application.
Spray delivery (canopy section): Different spray delivery along the canopy is
effective in reducing FDF in the upper and lower canopy sections.
Night and day time: Night time-low volume application resulted in higher deposition than day time sprays but night time-high volume have strongest effects on FDF and fruit removal.
Spraying citrus trees are also used to control pests and the most widespread and
efficient current methods are based on the application of organophosphate insecticides against the adult flies according to Chueca et al 2008. “There are two methods of spraying with ground equipment in Spanish citrus orchards, depending on the maturity of the fruit. When fruit is still green and has not yet reached a yellow–orange colour, a mix of malathion and protein bait is sprayed only over the sunny side of the canopy. When the fruit is nearly ripe, a cover treatment of malathion, is applied to the whole canopy.” [9]
Chueca et al 2008 developed an automatic sprayer to be efficient and
economically feasible for performing low-volume bait treatments against the Mediterranean fruit fly. Several considerations such as appropriate spray nozzle, automated system to detect the tree and adaptation with different tree configuration have been studied in their research. “Four nozzle types manufactured by Teejet (Spraying Systems Co., Wheaton, Illinois, USA),which produce extremely coarse droplets and low flow rates, were chosen according to the ASABE standards.” Figure 5 shows the location of collectors for measurement of stain size distribution of nozzles.
Figure 5: Location of collectors for measurement of stain size distribution of nozzles
Chueca et al 2008.
The microcontroller-based electronic control system used in this study utilizes
Sonar-BERO 3RG6176-6GH00 ultrasonic distance sensor to receive the basic information about detecting the postion and shape of the canopy with respect to the machine and then process them via a PIC microcontroller model 16F877A which is famous for its large number of digital input/output ports and built in A/D with the possibility of using 3 timers (two of which are 16 bits) and 14 sources of interruption. Applied flow was controlled by a Lucifer 321K 15 03E servo-controlled solenoid valve (Parker Hannifin S.p.A., Gessate, Italy). The user interface used in this study was developed with A C compiler as well as the developed control algorithm. “The operator communicates with the control unit through navigation keys and one display. The control unit receives signals from the ultrasonic sensor and commands

the solenoid valves to start and stop liquid flow to the nozzles. The final version of the control unit is shown in figure 6.”
Figure 6: The hydraulic system mounted on the sprayer and Control unit with display
and navigation keys for ultrasonic target detection system. (Chueca et al 2008.)
In order to determine the adaptability of the prototype sprayer in different crop
systems, several tests were done by the researchers. It has been tested in applications against Ceratitis capitata (Wiedemann), one of the insects that currently causes the most economic losses around the world. However, this machine can be used to control many other fruit flies. A two-factor analysis of variance (ANOVA) was performed to study the effect of the effect of the position of the collector on the coverage. It was found that the interaction between the type of nozzle and the operating pressure was statistically significant with 95% confidence interval, however no statistically significant differences between stain sizes were found for the TT-11004VP nozzle at the two pressures. Based on these results, AI11003VS nozzle was selected to be installed on the machine because it produced the largest stains, most in the range 2–4 mm.
As a result of 8000 tests treat during more than 50 working hours it was
ensured that the sensor-controlled sprayer could be adapted to most of the commercial citrus crop systems in the Valencian Region of Spain. Moreover results of analysis of the product distribution showed that the majority of the spray volume was distributed over the external canopy, thus leaving the product deposit easily accessible to med-flies. Taking into account that the water volume rate used in the trial was 80 l/ha it may be expected that lower volume bait treatments would probably produce less coverage inside the trees. Finally, this automatic spraying system has proven to be robust and easily adjustable to most commercial conditions, and it has been demonstrated that the treatment is located on the outer side of the trees, as it was required.
Mechanical enhancement
The approach that is used in all of the four major types of mechanical harvesting,
air shaking, trunk shaking, limb shaking and canopy shaking is unable to select the harvested fruit by size or maturity. Mass harvesting becomes an issue when two fruit cops present on the citrus trees. For example, Valencia or late-season oranges which have historically been slightly less than half the total Florida orange
production and is the only orange cultivar harvested after citrus trees bloom in the February-April period has the mature and young (next year’s) fruit on the tree at harvest time. Therefore only the largest mature fruit is to be harvested and the half-size immature fruit crop must remain on the tree to mature for the following season. Selective harvest of the mature crop presents no particular problems for hand harvest, but has been a significant problem for mechanical devices and abscission chemicals.
K.F. Sanders 2005, developed a size-selective picking head with the potential to
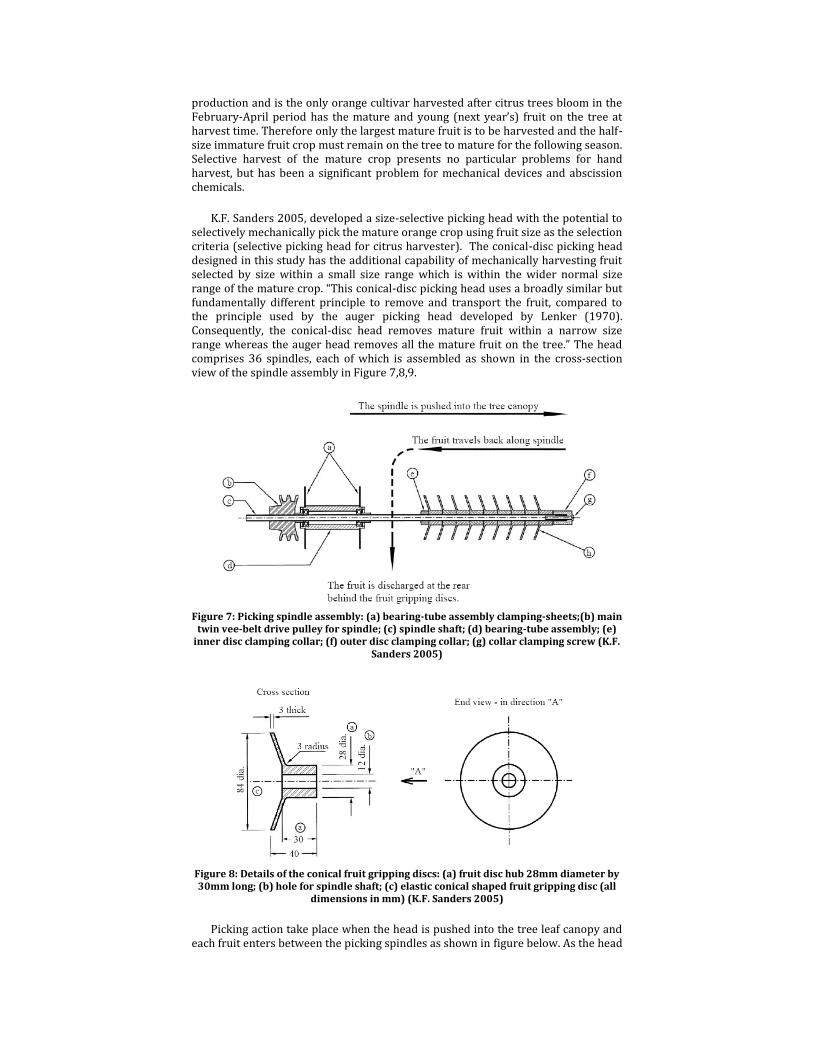
selectively mechanically pick the mature orange crop using fruit size as the selection criteria (selective picking head for citrus harvester). The conical-disc picking head designed in this study has the additional capability of mechanically harvesting fruit selected by size within a small size range which is within the wider normal size range of the mature crop. “This conical-disc picking head uses a broadly similar but fundamentally different principle to remove and transport the fruit, compared to the principle used by the auger picking head developed by Lenker (1970). Consequently, the conical-disc head removes mature fruit within a narrow size range whereas the auger head removes all the mature fruit on the tree.” The head comprises 36 spindles, each of which is assembled as shown in the cross-section view of the spindle assembly in Figure 7,8,9.
Figure 7: Picking spindle assembly: (a) bearing-tube assembly clamping-sheets;(b) main
twin vee-belt drive pulley for spindle; (c) spindle shaft; (d) bearing-tube assembly; (e) inner disc clamping collar; (f) outer disc clamping collar; (g) collar clamping screw (K.F.
Sanders 2005)
Figure 8: Details of the conical fruit gripping discs: (a) fruit disc hub 28mm diameter by 30mm long; (b) hole for spindle shaft; (c) elastic conical shaped fruit gripping disc (all
dimensions in mm) (K.F. Sanders 2005)
Picking action take place when the head is pushed into the tree leaf canopy and
each fruit enters between the picking spindles as shown in figure below. As the head

is pushed into the canopy the fruit is pressed against the fruit gripping discs on the outer end of four spindles. A closer real view is shown in figure 10.
Figure 9: Side view of picking head assembly (all dimensions in mm) (K.F. Sanders
2005)
Figure 10: Photograph of a piece of fruit gripped between four picking spindles, (K.F.
Sanders 2005)
Fruits are removed from their stem with ideal twist picking action that is
generated by the discs. As the fruit squeezes between the spindles, discs are deformed 6-14 mm which causes the discs to grip and spin the fruit figure 11.

Figure 11: Close-up end view of four adjacent picking spindles: (K.F. Sanders 2005)
According to this study, the fruit picked with this system has a diameter
between 70 and 86 mm which is fairly uniform in size without additional post-harvest sorting. Moreover using this collection system minimizes damage to the fruit after it has been detached from the tree by catching it before it falls.” Damage can occur as the fruit falls through the tree branches and collides with spikes on the branches. This collection system also overcomes the need to catch the fruit beneath the tree either before it reaches the ground or to later pick it up off the ground.”
Effects of Mechanical harvesting on tree health
Mechanical harvesting often causes visible injuries that can include shedding of
leaves, flowers, and young fruit, breaking of branches, scuffing of bark, and exposure of root systems. A typical concern about mechanical citrus harvesters is their effect on tree health. Mechanical citrus harvesters can remove leaves, branches together with the mature and immature oranges Figure 12 & 13. Visual injuries caused by mechanical harvesting can include defoliation, twig loss, removal of flowers and young fruit, exposure of roots, and occasionally the removal of some bark (Li and Syvertsen, 2004). Buker et al. (2004) have studied the long-term effects of tree shakers on yield. They found that groves with healthy trees harvested commercially in Florida about 10 years with trunk shakers have not shown any negative effect on yield, however leaf loss and bark injuries to the citrus trees have been found. Major leaf loss up to 50% as a result of mechanical harvesting prior to a freeze may increase freeze damage, but has not resulted in yields reduction. According to this study, in Florida citrus groves where trunk shakers were continuously used to harvest for over 10 years and a small number of roots exposed under trees, yield was not affected. Barking on the trunk can be minimized by using linear direction trunk shakers with proper clamp pads and experienced operators. Canopy shakers can also lead to bark injuries on branches which are sever in the first year of mechanical harvesting. In the subsequence year, branch injury is no worse than ladder damage from hand picking operation.

Figure 12: Bark scuffing caused by trunk shaker, Figure 13: Limb breakage and bark
scuffing caused by canopy shaker
Trunk and canopy shake can remove sufficient fruit-let and reduce next year’s
yield at least 25% in Valnecias trees after the average fruitlet size of the emerging group exceeds 1 inche diameter. Kuo-Tan Li et al (2005) studied the impacts of mechanical harvesting on the health status of citrus trees. They measured removal of mature fruit, leaves, and shoots, mid-day drought stress and leaf photosynthesis for mature ‘Hamlin’ and ‘Valencia’ orange trees. In this study, the performance of a linear-type trunk share operating at 4 Hz with 70.8 kg weight, and a 13 cm trunk displacement for various shaking durations versus hand harvesting was compared. As the result of hand harvesting, 100% of the fruits were removed, while trunk shaker removed 90% mature fruit in 10 s in early harvest ‘Hamlin’ and ‘Valencia’. They found that longer shaking time increases the fruit removal slightly but no significant difference between 10 s or 20 s shake duration was observed figure 14.
Figure 14: Mature fruit removal and b) defoliation of hand and trunk-shaker harvested ‘Hamlin’ and ‘Valencia’ trees. Treatments: Hand: hand harvest; 10 S: 10 s trunk shaking;
20 S: 20 s trunk shaking. Vertical bars represent standard error.
Figure 14.b shows that 10 to 15% of the leaves have been removed by
mechanical harvesting using 10 s shaking time. According to this study trees shaking treatments remove >90% mature fruit without bark damage. In addition, compared to harvesting by hand, trunk shaking remove 10% more leaf area and twigs, and occasionally cause some root exposure. Results have also shown no significant impairment of physiological responses by mechanical harvesting when trees were properly irrigated before and after harvest.
As a result, it can be concluded that well-managed citrus trees can tolerate low
levels of defoliation as well as any potential root and bark injury caused by mechanical harvesting with a trunk shaker without developing physiological stress. Excessive shaking duration (>20 seconds) might have sever root damage and develop temporary drought stress when soil moisture is relatively low.

Post harvesting and handling
According to Grigelmo-Miguel & Martin-Belloso (1999), 85% of the oranges
produced by the foremost producers are processed into juice. It is important to determine the parameters with major impacts related to ripeness during post-harvest in order to define the appropriate quality index for ripeness in different fruits. Jaren et al (2001) studied around non-destructive impact testing for sorting fruits to create an autonomous system to control the impact test which can calculate the impact parameters, an index and sort of fruits as well as creating a database to sort different fruit species and varieties. Although their experiments are performed on pears and apples, the same approach can be utilized in citrus industry. According to the impact test system demonstrated in figure, using two impact tests in each fruit at opposite points in different locations on the fruit surface, the measurements (acceleration of the rod during impact) were collected. Other measurement made were mass, radious of curvature and circumference for every piece of fruit in the sample. This procedure for sensing firmness as a system for postharvest ripeness sensing of fruit uses several parameters as the basis for establishing classification criteria by discriminating analysis procedures. Classification of fruits into firmness classes by using this impact response and discrimination analysis is shown to be fairly accurate and of potential to be implemented in an on-line fruit sorting system.
Figure 15: Impact test image Jaren et al (2001)
Mechanical harvester of fruits can cause unite or sever damages on branches
and fruits. In addition to that, as fruits fall down on the ground they might split, puncture or bruise. Other damage can be occurred while picking and loading fruits from ground and transporting by trucks. Physico-mechanical properties of citrus peel should be considered in mechanical harvesting design. Krishna et al (2006) determined post harvest physic-mechanical properties of orange peel and fruits with respect to the storage period in both ambient and refrigerated conditions. They found that initial moisture content of orange peel was 292% dry-basis (db). At the end of 10 days, this parameter was measured 252.8% and 281.3% under ambient and refrigerated conditions respectively. The peel moisture loss in ambient and refrigerated conditions after 10 days storage was observed as 13% and 3.7% respectively. The rate of peel moisture loss was 3.6 times higher in ambient condition than that in refrigerated condition. According to this study, peel rupture force, tensile strength and modulus of elasticity decreases with storage periods under both storage condition, the comparison of properties between refrigerated and ambient storage conditions revealed that rupture force, tensile strength and modulus of elasticity were consistently higher in refrigerated conditions than that in ambient condition but the difference was statistically non-significant at 5% probability level.
Krishna et al (2006) showed a strong correlation (fourth-order polynomial
equations) in the color index of orange during storage under ambient and refrigerated conditions with storage period. Figure 16.
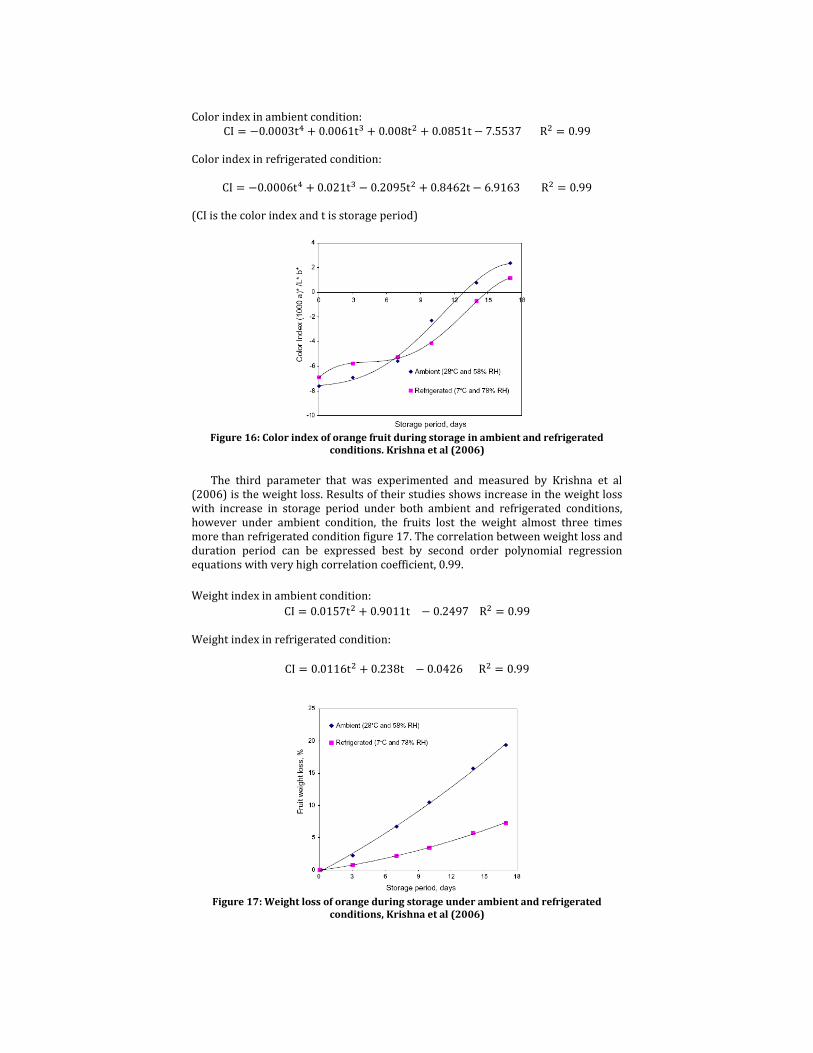
Color index in ambient condition:
Color index in refrigerated condition:
(CI is the color index and t is storage period)
Figure 16: Color index of orange fruit during storage in ambient and refrigerated
conditions. Krishna et al (2006)
The third parameter that was experimented and measured by Krishna et al
(2006) is the weight loss. Results of their studies shows increase in the weight loss with increase in storage period under both ambient and refrigerated conditions, however under ambient condition, the fruits lost the weight almost three times more than refrigerated condition figure 17. The correlation between weight loss and duration period can be expressed best by second order polynomial regression equations with very high correlation coefficient, 0.99.
Weight index in ambient condition:
Weight index in refrigerated condition:
Figure 17: Weight loss of orange during storage under ambient and refrigerated
conditions, Krishna et al (2006)

Firmness value of citrus can be changed during the post-harvest storage under ambient and refrigerated condition and is more observed under ambient condition because of the temperature issue which accelerates metabolic procedure and leads to fruit softening. In ambient storage condition, higher temperature promotes fruit transpiration and ripeness which decreases fruit firmness. According to Krishna et al (2006) the correlation equation for fruit firmness and storage duration is followed by third order polynomial regression equations with correlation coefficient of 1.
Color index in ambient condition:
Color index in refrigerated condition:
Storage duration and condition also affects the peel puncture resistance. Krishna
et al (2006) showed that this force decreases from 16.8N to 14.7N and 16.8N to 15.3N with storage period under ambient and refrigerated conditions respectively. Although the rupture force was observed to be higher in refrigerated condition, but no significant difference has been observed in both cases with 5% significant level. Peak cutting force was also observed to decrease with the storage period without significant storage condition difference at P>0.05.
The effects of Methyl iodide (MI) and forced aeration on the post-harvest quality
of lemons was tested by L. H. Aung et al 2004. They evaluated lemons after the 1st and 3rd week of storage at 5EC for rind pitting or staining which developed after MI fumigation. In this study, each fruit was visually rated using a scale of healthy, slight, moderate and severe (Figure 18). Their experimental design consisted of four treatments of three replication using a randomized complete block design with each treatment (or chamber) containing 55 fruits. According to this study, “MI fumigation at dosages of 24, 28, and 32 g/m3 caused moderate to severe rind injury (phytotoxicity) of lemon fruit obtained from the cold coastal and warm desert regions and lemons harvested in the later seasons sustained greater amount of fruit phytotoxicity. Thus, both early season coastal or desert fruit showed less phytotoxicity than mid- and late-season fruit. The early coastal lemons showed the least amount of fruit phytotoxicity due to MI fumigation at the dosages used. The MI injury to late season lemon fruit was maximal after 1-week storage at 5EC, whereas early season lemons showed moderate amount of phytotoxicity after storage of 1 week and followed by greater incremental injury after 3-week storage at 5EC. In contrast, forced aeration with 3.5 l of air per min at 21EC for 24 h immediately after MI fumigation significantly (>P = 0.01) reduced fruit phytotoxicity irregardless of both season and climatic region from which the lemons were obtained.”
Figure 18: the phytotoxicity rating of lemon fruit (L. H. Aung et al 2004)

Figure 19: The comparison of 28 g/m3 methyl iodide fumigated fruit forced aerated for
2 h vs. 24 h; note the severe fruit injury of the 2-h aeration in contrast to the maintenance of fruit quality with the 24-h aeration treatment. (L. H. Aung et al 2004)
Fruit quality and maturity are two other parameters to be considered in citrus
mechanical harvesting and handling. Most fruit quality detecting methods in orchards is based on destructive readings of the parameters acidity, juiciness, and soluble solids content (SSC). “Fruit maturity on trees is most often evaluated by measuring SSC using refractometry with the aim of determining the optimum harvest date. During citrus fruit development the SSC increases until a steady state is reached. At this point fruits should be harvested to avoid possible damage due to unfavourable weather conditions. Spectroscopy in the visible and NIR wavelength range up to 1100nm might serve as a feasible tool for non-destructive fruit monitoring on trees, since due to the availability of lightsensitive, robust, and inexpensive spectrophotometer compounds it has become a widely used technology for fruit sensing” [7].
Zude et al 2007 investigated non-destructive near-infrared spectroscopy (NIRS)
for product monitoring to understand whether useful information can be derived with this method for application in precision horticulture. They carried out monitoring citrus fruit SSC on trees over two harvest periods using NIR spectroscopy. In this study, fruit trees of five cultivars from a commercial orchard, located in California, were selected to provide fruit samples for non-destructive and destructive measurements. Using a hand-held photodiode array (PDA) spectrophotometer instrument (Pigment Analyzer, CP, Germany) , the nondestructive readings of the fruit remittance spectra in the wavelength range from 450 to 1100nm with a resolution of 3.3nm (MMS1, Zeiss, Germany) were collected and processed in Matlab. The results indicate that information on the fruit quality can be obtained with spectral–optical monitoring. The method has potential for use as a tool in site-specific harvest management. However, recalibration is necessary and more advanced methods for determining the site-specific harvest date are required.
Mechanical properties of citrus
Topuz et al (2005) compared physical properties of four varieties of oranges,
(Alanya and Finike (domestic cv.), W. Navel and Shamouti (foreign cv.)) grown in West-Mediterranean region of Turkey. Table 1. They found many of the physical properties of the orange varieties statistically different at 1% significant level with the exception that the bulk density and the porosity were found to be insignificant.

Table 1: Physical properties of the four orange varieties
Four orange (Citrus cinensis) varieties (Alanya and Finike (domestic cv.), W.
Navel and Shamouti (foreign cv.)), grown in West-Mediterranean region of Turkey, were used for all the experiments in this study. Samples were obtained from the province of Antalya, Turkey during the 2003 harvest season, and kept in a refrigerator until laboratory analyses were performed. For each orange variety, the 50 samples were randomly selected from the orange trees. All of the analyses were carried out at a room temperature of 20–21 °C for two days during the laboratory tests. All of the tests were made at the Biological Test Devices and Food Engineering Laboratory of Akdeniz University, Antalya, Turkey.
Decision support system and fleet management in citrus mechanical harvesting
According to Wiki, decision Support Systems (DSS) is a specific class of
computerized information system that supports business and organizational decision-making activities. This task is usually done through interactive software which receives the information from raw data, documents, personal knowledge, etc to identify and solve problems and make decisions.
Fleet management is about providing information about vehicle operation from
origin to destination (Federal motor carrier safety administration). In the field of agriculture and citrus mechanical harvesting, fleet management systems can help growers to track the location and operation status of their machineries for a better efficiency management and overall system productivity. Most of the related commercial agriculture fleet management systems such as John Deere’s JDOffice with JDLink and Trimble’s Agriculture Manager System are closed-source. Yu-Cheng et al [2008] proposed an open source called the Bio-Production Execution system (BES) to bridge the information gap between the center office and machines/sensors in order to facilitate the process of decision making. In this system, raw data gathered from different sources (i.e. data from bio production machineries (tractors, planters, harvesters, etc) including location, fuel level, fluid level and maintenance condition, etc and sensory data) are first gathered and processed to generate useful information for management decisions. Since the system is to work under extreme environmental condition, it should be rugged,

therefore a date processing/analysis function is needed to perform post acquisition and signal processing on sensory data. According to this architecture, data from machines and sensors can be uploaded to the responsible BES and users at the management center can view the processed information and perform control management strategies through the user interface.
Figure 20: Architecture of Bio-Production execution system, Yu-cheng et al (2008).
For the core elements of hardware/software of this system, the Gumstix
microcomputer which is a fully functional miniature computer based on Marvell XScale processors running Embedded Linux is recommended. Due to the long distance covered by mass production farms, wireless equipment is a must, thus Wireless 802.11 Communication technology which is rugged to radio noise interfere is suggested. Although wireless 802.11 communications is standard for home or office use, with standard range of 100m, there are standard equipments to help extend the distance of access points up to 20 miles and still maintain a 2 Mbps bandwidth. Ch and CGI scripts are recommended for coding the web-based user interface.
An application of this system in mechanical harvesting of citrus is in yield
monitoring. This system can be combined with the available yield monitor for citrus fruits developed by Ehsani et al (2006). Raw data from gutters and laser beam used in this monitoring system can be send using BES for managers to inform them about the working trailers that are nearly to full to make the appropriate decision (i.e. a new trailer will arrive at the site on time or scheduling machineries, driver or operation)
Another application for the BES in citrus groves is in robotic harvesting. Human
labors will be replaced with low-cost robot labors in near future. According to Whitney 1989, a robotic arm under development in Florida has demonstrated a picking rate of one fruit every five seconds from the outer canopy. A robot labor can be assigned to one to four or more trees (depending on the grove shape) to perform the conventional spray and harvest tasks. The technicians will then be monitoring and handling robot performance via BES (figure 21).

Figure 21: robotic harvesting and BES system
BMC COMPUTER

Review of Paper title: Citrus Yield Mapping System on a Canopy Shake and Catch Harvester An ASABE Meeting Presentation, Paper Number: 073050 Radnaabazar Chinchuluun, Won Suk Lee, Reza Ehsani Previous studies on Yield monitoring and mapping system:
“A number of yield monitoring and mapping systems were studied and
developed for various fruits and crops such as potatoes (Campbell et al., 1994), peanuts (Vellidis et al., 2001), silage (Lee et al., 2005), cotton (Perry et al., 2005), and citrus (Whitney et al., 2001; Annamalai et al., 2004; MacArthur et al., 2006; Grift et al., 2006; Kane and Lee, 2006; Chinchuluun and Lee, 2006). Yield monitoring can be done either early season when fruit is on trees (Annamalai et al., 2004; MacArthur et al., 2006; Kane and Lee, 2006; Chinchuluun and Lee, 2006) or harvesting season when fruit is harvested.”
Summary In this paper, the researchers have used a variety of classification methods such
as neural network, Bayesian classifier and discriminate analysis based on different features of fruit surface to identify fruit from background image. The ultimate goal of this study has been to build a real-time system and to test it on a canopy shake and catch harvester system. The researchers aimed to develop hardware and software components of a real-time citrus yield mapping system capable of counting fruits, measuring size of fruits for individual tree or unit area. To this aim, they had to develop image processing algorithm for fruit size and measurement recognition.
The hardware system used in this research consists of:
1- One 3CCD progressive scan digital color camera (Fig.18)
2- Four halogen lamps (Fig 19)
3- One Laptop (Fig 20)
4- data acquisition card (Fig 21)
5- Polarizing filters (Fig 22)
The 3CCD progressive scan digital color camera, halogen lamps, Laptop, data acquisition
card, Polarizing filters
The camera and lamps have been placed in an aluminum housing both to hold
the components and to keep them away from sunlight. The final assembly is shown in figure.

Camera and lamps, Camera and Housing, Canopy shake and catch harvester, Housing
placed on the conveyor system
The researchers have run their hardware and software prototype both in a bench test and field test. 1- Color segmentation result – Test bench
Original image, Bayesian classifier result, Morphological operation result, Watershed
transform result.
Figure 22: Regression analysis between fruit area and actual fruit weights.

2- Color segmentation result – Field test
Original image, Result of Bayesian classifier. Result of morphological operatio, Result of
the Watershed transform.
Regression analysis between human counting and algorithm counting.
As a conclusion, a citrus yield mapping and fruit quality inspection system to
work on a commercial canopy shake and catch harvester has been successfully developed. This system can count the number of fruits and extract the sum of fruits diameter using an image analysis algorithm from a sets of images taken on the test-bench trial. As a result of regression analysis, the coefficients of determination of the sum of areas, the number of fruit and the sum of fruit diameters against actual fruit weight have been 0.962, 0.892 and 0.963, respectively. In a field test, the R2 coefficient between the number of fruit counted by this system and human counting was 0.891 which means that the system needs further improvements.

Review of Paper title: Field Evaluation of a Citrus Fruit Pick-up Machine Ganesh C Bora, M Reza Ehsani, Renee Goodrich, George Michaels, Summary:
In this paper, the researchers have tested a citrus pickup machine developed by OXBO international crop to evaluate its picking rate, picking efficiency, field capacity, impact on surface microbial loads, and its efficiency for removing undesirable fruit and trash under different ranges of forward speed and grove conditions.
The results of study on the microbial load on the surface of citrus fruit indicated
no significant differences between fruit harvested from the tree, fruit picked up from the ground by hand, and the fruit picked up by a pick-up machine.
The picking machine used in this research is shown in figure.
Schematic of the pick-up machine, The OXBO pick-up Machine, The modified OXBO
pickup machine, Closer view of the picking assembly and trash throwing belt
Two field tests have been conducted in this research at two different groves with
different grove conditions. The first test has been carried out at a ridge grove with row-to-row spacing vary from 25 to 30ft and Astatula soil type. The experimental design has been completely randomized with five replications. The second test has been conducted in a Silver Strand bed and swale grove with row-to-row distance about 24 ft. The experimental design has been completed in a completely randomized block with bed and swale as blocks, with twenty replications for swale and twenty two replications for bed. The collected data for both tests are shown in Table 1 and 2 respectively.
Analysis of variance (ANOVA) has been used in the first experiment to test the
difference between the means of picking rate, picking efficiency, damaged percentage, and field capacity for five replications. The result of statistical analysis has showed that there was no significant difference between each replicate. The results have also showed that none of the trash except a glass bottle was picked up by the machine.
In the second experiment, which has been completely randomized block design
with bed and swale as two blocks, statistical analysis has shown that the picking efficiency in each block has not been significantly difference from each other and could be accepted as the representative data for that test condition, however the percentage of damaged fruit in each block has been significantly different. As

evident from the results, the machine has been more efficient while operating on the flat bed.
Table 2: Field evaluation test results of the pick-up machine from preliminary test.
Table 3:Evaluation results from the test on Sliver Strand Grove
In this research, the microbial load on the surface of the fruit has indicated that
there were no significant differences between the three different groups. E.coli and Salmonella has not been detected on the surface of the fruit from any of the three groups. Table.
Table 4: Summary of fruit surface indicator and pathogenic organisms

Review of Paper title: Mechanical harvester for process oranges D. L. Peterson Summary
The objective of this research has been to develop an effective, continuous mechanical harvesting system for processed oranges, grown in high density groves, using a canopy shaker. This research has been conducted in two phases. The phase one objective has been to design and test a double spiked-drum canopy shaker that would effectively remove oranges. If successful, phase two would be to develop a prototype harvesting system that would remove, catch, and containerize oranges.
Figure 23: Schematic of orange shaker, Prototype orange harvesting system, Schematic
of prototype harvester
Test procedures Shaker – Phase 1: The shaker unit has been tested in commercial groves in Florida from February
through May 1996 without any special pruning or grove preparation. Prototype harvester- phase 2 All tests were conducted in commercial groves. Groves were selected with tree
size that best fit the size of the harvester. For both phases of shaker and harvester development, tests have been
conducted by personnel from the University of Florida. Each treatment has been replicated at least three times with two to six half tree canopies per replication.
Results SHAKER — PHASE 1
The result data are shown in table. According to this data, the shaker unit has shown good potential for fruit removal. The double-drum shaker has been very stable and reliable. Fingers penetrated into and out of the canopy easily and tree damage was minimal. Removal ranged from 71 to 91% at ground speeds from 1.4 to 3.2 kph (0.9 to 2 mph). It was difficult to determine exactly where the shaker rods
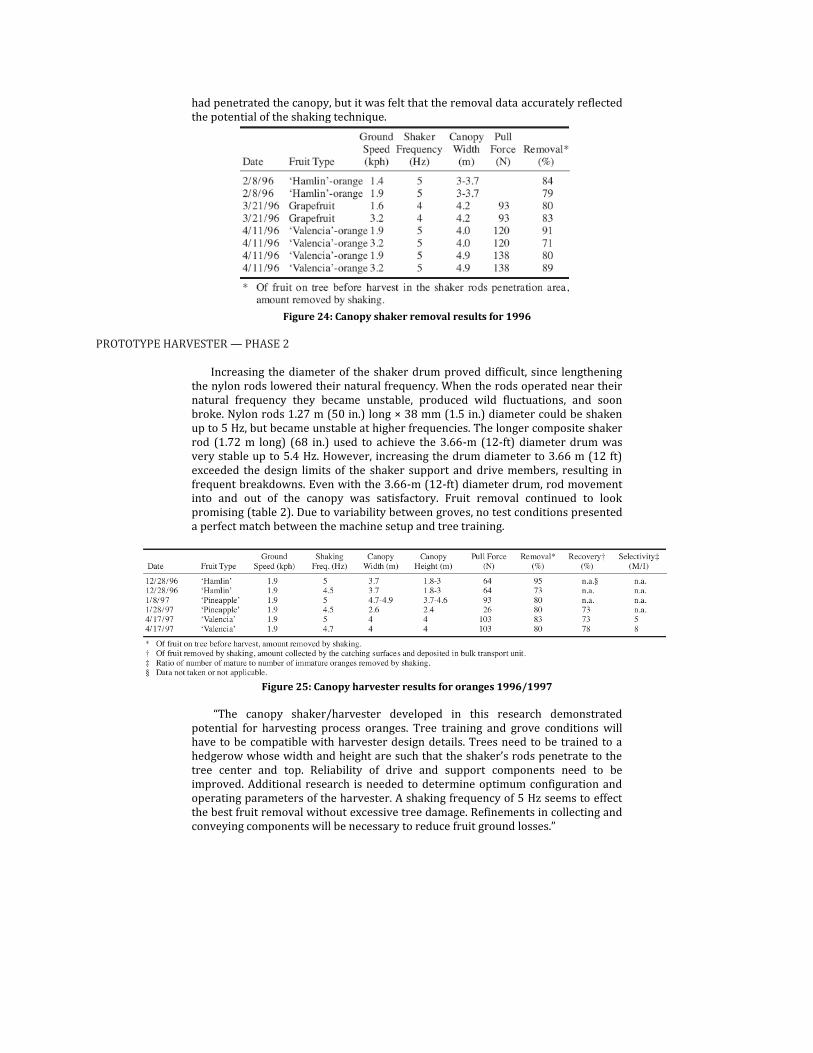
had penetrated the canopy, but it was felt that the removal data accurately reflected the potential of the shaking technique.
Figure 24: Canopy shaker removal results for 1996
PROTOTYPE HARVESTER — PHASE 2
Increasing the diameter of the shaker drum proved difficult, since lengthening the nylon rods lowered their natural frequency. When the rods operated near their natural frequency they became unstable, produced wild fluctuations, and soon broke. Nylon rods 1.27 m (50 in.) long × 38 mm (1.5 in.) diameter could be shaken up to 5 Hz, but became unstable at higher frequencies. The longer composite shaker rod (1.72 m long) (68 in.) used to achieve the 3.66-m (12-ft) diameter drum was very stable up to 5.4 Hz. However, increasing the drum diameter to 3.66 m (12 ft) exceeded the design limits of the shaker support and drive members, resulting in frequent breakdowns. Even with the 3.66-m (12-ft) diameter drum, rod movement into and out of the canopy was satisfactory. Fruit removal continued to look promising (table 2). Due to variability between groves, no test conditions presented a perfect match between the machine setup and tree training.
Figure 25: Canopy harvester results for oranges 1996/1997
“The canopy shaker/harvester developed in this research demonstrated
potential for harvesting process oranges. Tree training and grove conditions will have to be compatible with harvester design details. Trees need to be trained to a hedgerow whose width and height are such that the shaker’s rods penetrate to the tree center and top. Reliability of drive and support components need to be improved. Additional research is needed to determine optimum configuration and operating parameters of the harvester. A shaking frequency of 5 Hz seems to effect the best fruit removal without excessive tree damage. Refinements in collecting and conveying components will be necessary to reduce fruit ground losses.”

Review of Paper Title: Mechanical harvesting of Florida citrus trees has little effect on leaf water relations or return bloom KUO-TANLI, JIMSYVERTSEN AND JACKIE BURNS Summary
Since mechanical harvesting often causes visible injuries that can include shedding of leaves, flowers, and young fruit, breaking of branches, scuffing of bark, and exposure of root systems, the purpose of this research has been to assess the impacts of mechanical harvesting on the health status of citrus trees. Several parameters have been measured, including removal of mature fruit, leaves, and shoots, mid-day drought stress and leaf photosynthesis for mature ‘Hamlin’ and ‘Valencia’ orange [Citrussinensis(L.) Osb.] trees. The test has been performed under restricted or normal irrigation regimes.
The performance of a linear-type trunk share operating at 4 Hz with 70.8 kg
weight, and a 13 cm trunk displacement for various shaking durations versus hand harvesting has been compared. As the result of hand harvesting, 100% of the fruits were removed, while trunk shaker has removed 90% mature fruit in 10 s in early harvest ‘Hamlin’ and ‘Valencia’. Longer shaking time increased the fruit removal slightly but there was no significant difference between 10 s or 20 s shake duration (Fig. below).
Figure 26: Mature fruit removal and b) defoliation of hand and trunk-shaker harvested ‘Hamlin’ and ‘Valencia’ trees. Treatments: Hand: hand harvest; 10 S: 10 s trunk shaking;
20 S: 20 s trunk shaking. Vertical bars represent standard error.
Figure b shows that 10 to 15% of the leaves have been removed by mechanical
harvesting using 10 s shaking time.
Regarding water relations and drought stress, trees harvested by the trunk shaker have maintained water status similar to trees harvested by hand under most conditions during the harvest season. Even after an excessive shaking time of 30 s that was expected to cause damage to roots and trunk bark of actively growing trees, mechanically harvested trees did not show increased drought stress relative to the hand harvested trees when available soil water was high. When irrigation was withheld for 3 weeks before harvest, however, trees harvested with excessive trunk shaking (>20 s) and re-watered after harvest developed drought stress similar to that of the continuously non-irrigated trees ( Fig below).

Figure 27: Effect of mechanical harvesting and irrigation on tree water status in ‘Hamlin’
citrus trees.
The results of this study shows that trees, shaking treatments has removed >90% mature fruit without bark damage. In addition, compared to harvesting by hand, trunk shaking has removed 10% more leaf area and twigs, and occasionally caused some root exposure. Results have also showed no significant impairment of physiological responses by mechanical harvesting was found when trees were properly irrigated before and after harvest.
“The results indicated that healthy, well-managed citrus trees can tolerate low
levels of defoliation as well as any potential root and bark injury caused by mechanical harvesting with a trunk shaker without developing physiological stress. Trees that were shaken for an excessive duration of >20 s might have had more severe root damage and thus developed temporary drought stress when soil moisture was relatively low.”

Review of Paper title: Development of a Yield Monitor for Citrus Fruits Tony Grift Reza Ehsani, Kentaro Nishiwaki, Catherine Crespi, Min Min,
Summary In this research, three methods of fruit counting have been investigated. These methods are: 1- Dual photo interruption based mass flow measurement using clump and spacing lengths as inputs for a mass flow estimation algorithm. (Figure 1 to 5) 2- Single laser beam fruit counting taking advantage of the rolling ramp 3- Single laser beam fruit counting using gutter singulation All the methods used in this study are non-destructive. Method 1- Figures
The first method is actually based in the photo interruption concept which has been already used by reseachers to measure the mass flow of fertilizer particles. This method allows multiple particles to interrupt simultaneously (clumps separated by spacings) using a sophisticated algorithm which estimates the number of fruits from clump and spacing lengths. The sensor that is used in this method is much larger than the one for fertilizers particles. This method did not appear to be applicable in lab and field conditions to properly results in the estimated counted fruits.
Flow of identical particles falling from a funnel (left side) showing clumps of particles, Simulated sorted clump lengths for distributed diameter particles (Gaussian, mean 5
mm, std 1 mm) and a flow density of 0.5. The straight lines indicate the Simulated Identical Particle Approximation (SIPA) method, Time-of-flight clump length
measurement principle with timing diagram, Portion of the Large Sensor Array, containing eight sensor boards with 30 OptoSchmitts each, Dual receiver units mounted
behind channeling tubes, excited by a single light source.
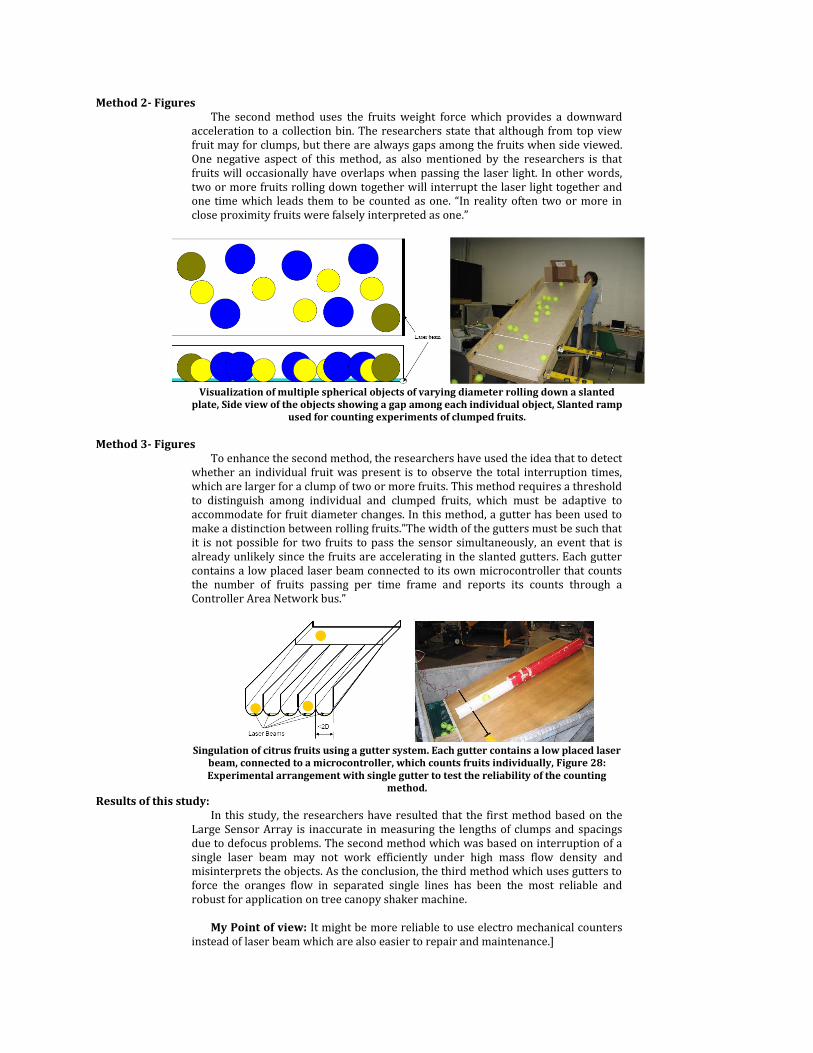
Method 2- Figures The second method uses the fruits weight force which provides a downward
acceleration to a collection bin. The researchers state that although from top view fruit may for clumps, but there are always gaps among the fruits when side viewed. One negative aspect of this method, as also mentioned by the researchers is that fruits will occasionally have overlaps when passing the laser light. In other words, two or more fruits rolling down together will interrupt the laser light together and one time which leads them to be counted as one. “In reality often two or more in close proximity fruits were falsely interpreted as one.”
Visualization of multiple spherical objects of varying diameter rolling down a slanted
plate, Side view of the objects showing a gap among each individual object, Slanted ramp used for counting experiments of clumped fruits.
Method 3- Figures
To enhance the second method, the researchers have used the idea that to detect whether an individual fruit was present is to observe the total interruption times, which are larger for a clump of two or more fruits. This method requires a threshold to distinguish among individual and clumped fruits, which must be adaptive to accommodate for fruit diameter changes. In this method, a gutter has been used to make a distinction between rolling fruits.”The width of the gutters must be such that it is not possible for two fruits to pass the sensor simultaneously, an event that is already unlikely since the fruits are accelerating in the slanted gutters. Each gutter contains a low placed laser beam connected to its own microcontroller that counts the number of fruits passing per time frame and reports its counts through a Controller Area Network bus.”
Singulation of citrus fruits using a gutter system. Each gutter contains a low placed laser
beam, connected to a microcontroller, which counts fruits individually, Figure 28: Experimental arrangement with single gutter to test the reliability of the counting
method.
Results of this study: In this study, the researchers have resulted that the first method based on the
Large Sensor Array is inaccurate in measuring the lengths of clumps and spacings due to defocus problems. The second method which was based on interruption of a single laser beam may not work efficiently under high mass flow density and misinterprets the objects. As the conclusion, the third method which uses gutters to force the oranges flow in separated single lines has been the most reliable and robust for application on tree canopy shaker machine.
My Point of view: It might be more reliable to use electro mechanical counters
instead of laser beam which are also easier to repair and maintenance.]

Review of Paper title: Machine Enhancements and Improvements, Improvement of canopy shaking mechanism to reduce tree injuries Dr. Reza Ehsani Summary
In this study, several design factors in developing canopy shaking mechanism such as shape of tine, number and length of the vibrating tines, the angle of tines with respect to tree canopy, forward speed, shaking frequency, and displacement amplitude have been selected through a trial and error process.
The vibration fruit removal force has been measured in this research by means
of ZigBee-based wireless sensor was able to measure the fruit acceleration in 3-D simultaneously at several points on the canopy. Field experiments have been performed in four groves, two with Hamlin and two with Valencia.
The result of this study can be listed as below: 1- “The results indicated that the amount of actual fruit removal force by the canopy shaker is about twice that of the current method of measuring fruit removal force that can be seen in the literature. “ 2- “The force experienced by the fruit is dependent on the location of fruit on the canopy. This could be caused by the radial formation of the tines.” 3- “In addition to maximum force, duration in which the force is applied can affect the fruit removal as it causes fatigue. “ 4- “Force requirement for fruit removal decreases as the season progress. “ 5- “As expected, the fruit treated with abscission agents were removed easily and with less force. “ 6- “It was found that in addition to natural variability of fruit removal force in the tree canopy, mechanical harvesting machine also are not applying uniform fruit removal force. (This information would allow modification and improvement of shaking mechanisms to reduce tree injuries which would help to maintain the health condition of citrus groves, decrease the chance of canker infection (by reducing the tree injury or plant material removal), and decrease machine)”

Review of Paper title: Physical Properties of Oranges in Response to Applied Gripping Forces for Robotic Harvesting Samuel J. Flood, Thomas F. Burks, Arthur A. Teixeira, Summary
This research discuss about the respond behavior of orange to a robotic harvester by studying its puncture and burst characteristics. Therefore the purpose of this study has been to develop a relationship between punch size and puncture force that would be applicable to the development of a robotic harvester.
As expected, the researchers have found that the force required to puncture or
burst a fruit is directly related to the contact area and is a function of two variables: the punch diameter used, and the radius of curvature of the fruit.
The researchers have then developed a regression model to correlate punch
diameter to puncture force based on the test data. Clearly, as the punch diameter size increases, the punch diameter term in the model approached zero. This leaves the puncture force term as a function of the radius of curvature only and correlates well with physical observations in that punch diameters beyond 2.540 cm approached the behavior of a flat plate, where puncture force has no longer been a function of the punch diameter but solely of the fruit properties. Final results of this study are used for recommendations to the design of a grasping robotic citrus harvester end effecter.
Punch sizes used in this research have been of size 0.323, 0.632, 0.964, 1.27, 1.90, and 2.540 cm. [Figure 38]. Burst tests have been performed with the whole fruit under flat plate compression [Figure 37]. Results of both tests are summarized in table 4, table 5, table 6 and table 7.
Table 5: Dimensional data summary of fruit used in puncture tests
Table 6: Summary of puncture test results.

Table 7: Dimensional data summary of fruit used in burst tests.
Table 8: Summary of burst test results.
Researchers have used the Analysis of variance (ANOVA) to analyze their data.
Results have showed that the samples from the three different three different dates have not been statistically different at the 95% significance level, (p-value 0.148). Therefore, the decreasing puncture force trend that was observed by Coggins and Lewis (1965), Juste et al. (1988), and McDonald et al. (1987) has not been observed in this study.
Figure 29: Illustration of characteristic diameters taken of fruit, Burst test conducted
with fruit-holding die, Punch test conducted with the 1.27 cm diameter punch.
Using regression analysis, a model has been developed in this research to test
the effects of increasing variability with increasing punch size. The response variable in this model is the natural log of the puncture force (lnpf). The variables considered are average diameter, radius of curvature, mass, and lnpd.
“ As expected, the force required to puncture or burst a fruit is directly related to the contact area. This is a function of two variables: the punch diameter used, and the radius of curvature of the fruit. The larger the radius of curvature, and thus the flatter the fruit at the point of contact, the more fruit will be in immediate contact with the punch. This results in a larger puncture force, which implies that the fruit can withstand higher contact forces when using larger punch sizes, as would be expected. Based on the results of these tests, recommendations can be made for the design of a grasping robotic citrus harvester end effector. The end effector should be made so that the grasping of the fruit does not exceed the bursting limits or the puncture limits, where the portion of the end effector in contact with the fruit may be expressed in equivalent punch diameter.”

Review of Paper title: Multispectral Imaging for In-field Green Citrus Identification Kevin E. Kane, Won Suk Lee, Summary
Traditionally, the visible spectrum has been used for fruit identification. The biggest issues with these camera systems have been occlusion and grouped fruit segmentation. An NIR InGaAs camera (FLIR Systems, Inc., Indigo Operations; Wilsonville, OR) was used for image acquisition. The spectral range of this NIR camera was from 900 to 1700 nm. The results from the in-field image acquisition process were a series of three-dimension matrix of values. Image processing was conducted using MatLab 7.0 software with the Image Processing toolbox.
Figure 30: Representation of an image block.
This project tested a ground level multi-spectral image acquisition and image processing system for the identification of green citrus fruit against a green leaf canopy. It serves as a study to the complex nature of the citrus grove lighting conditions. The most important knowledge gathered was a first-hand account of technical issues faced and how they might be over come in future systems. The image acquisition issues discussed in this paper included, target shifting, light/shadows changes, raw image saturation and multiple leaf reflections increasing the expected diffuse reflectance.
Qualitative results showed correct pixel class identification on the 12 validation
images as 84.5% when using the image processing algorithm described above. When comparing the citrus pixel count from the image processing algorithm to the manually selected citrus pixel count, the results showed an R2 of 0.74. These values show that the conceptual idea does work when in-field tests are preformed; however, there is still a lot of room for further refinements to the system design and implementations. The most import requirements for improved results include the system being capable of acquiring multiple waveband images at the same time, more wavebands and smarter image processing techniques.

Review of Paper title: Physical and nutritional properties of four orange varieties
“In this study, research was conducted to investigate both the physical and the nutritional properties of the orange fruits, by comparing the four varieties widely grown in Turkey, and then establishing a convenient reference table for orange mechanization and processing.’
“Four orange (Citrus cinensis) varieties (Alanya and Finike (domestic cv.), W.
Navel and Shamouti (foreign cv.)), grown in West-Mediterranean region of Turkey, were used for all the experiments in this study. For each orange variety, the 50 samples were randomly selected from the orange trees.”
Results and discussion
“Nutritional properties of the fresh squeezed juice of the four orange varieties were given in Table 8. The values of all the chemical properties of orange juices, except pH, were statistically different with respect to the varieties.”
Table 9: Nutritional properties of the four orange varieties
“Physical properties of the four orange varieties were given in Table 9. As seen
in this table. many physical properties of the orange varieties were found to be statistically significant at the different probability levels (5%, 1% or 0.1%), with the exception that the bulk density and the porosity were found to be insignificant.”

Table 10: Physical properties of the four orange varieties
Other useful information:
Paper No. Biochemical characterization of blood orange, sweet orange, lemon, bergamot
and bitter orange Sai dani Moufida, Brahim Marzouk “Organoleptic quality is determined by the following parameters:aroma, content
in juice and in sugars as well as the acidity that must be high for lemons and limes but moderate for other fruit productions.”
“Blood orange constitutes the group characterized by the highest juice rate if
compared to that of sweet orange and bergamot group and lemon and bitter orange group.”
“Blood orange, which is considered the most important origin of juice, is
characterized by the highest rate of juice (50.16%). Indeed for French orange, its juice percentage is of 42% (Dupaigne, 1971). For lemons, the content of juice determines their harvested period, it is of 30% in USA (Hodgson, 1967; Reuther and Castano, 1969; Cassin et al., 1969).”
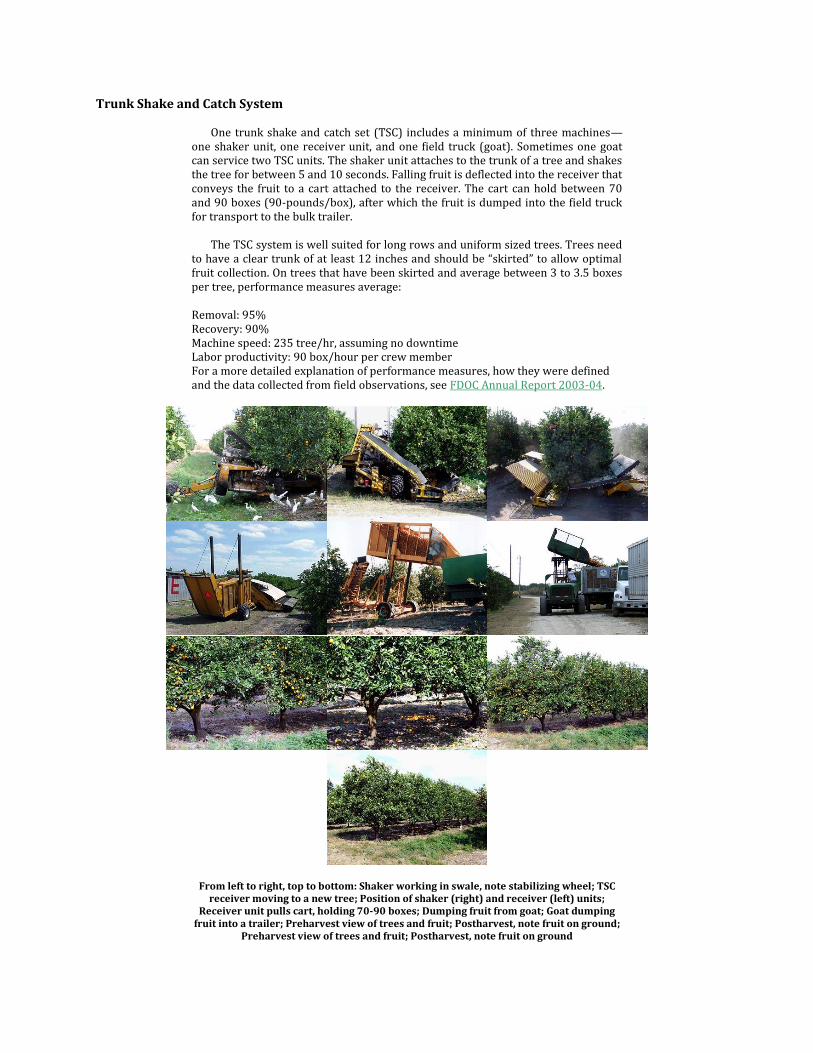
Trunk Shake and Catch System
One trunk shake and catch set (TSC) includes a minimum of three machines—one shaker unit, one receiver unit, and one field truck (goat). Sometimes one goat can service two TSC units. The shaker unit attaches to the trunk of a tree and shakes the tree for between 5 and 10 seconds. Falling fruit is deflected into the receiver that conveys the fruit to a cart attached to the receiver. The cart can hold between 70 and 90 boxes (90-pounds/box), after which the fruit is dumped into the field truck for transport to the bulk trailer.
The TSC system is well suited for long rows and uniform sized trees. Trees need
to have a clear trunk of at least 12 inches and should be “skirted” to allow optimal fruit collection. On trees that have been skirted and average between 3 to 3.5 boxes per tree, performance measures average:
Removal: 95% Recovery: 90% Machine speed: 235 tree/hr, assuming no downtime Labor productivity: 90 box/hour per crew member For a more detailed explanation of performance measures, how they were defined and the data collected from field observations, see FDOC Annual Report 2003-04.
From left to right, top to bottom: Shaker working in swale, note stabilizing wheel; TSC receiver moving to a new tree; Position of shaker (right) and receiver (left) units;
Receiver unit pulls cart, holding 70-90 boxes; Dumping fruit from goat; Goat dumping fruit into a trailer; Preharvest view of trees and fruit; Postharvest, note fruit on ground;
Preharvest view of trees and fruit; Postharvest, note fruit on ground

Definition of terms:
Available yield = Recovered fruit + broken fruit + missed ground & tree fruit + post-gleaning “shiners”. Harvest yield = Total net weight boxes / Estimated harvested tree spaces. Gleaning harvest = Preharvest fruit drop + Post-harvest tree fruit + Post harvest ground fruit – Post-gleaning shiners. Machine harvest = Harvest yield – Gleaning harvest. Removal % = 1 – [post-harvest tree fruit / (Available Yield – Preharvest drop)]. Recovery % = Machine harvest / (Available yield – Preharvest drop). Machine speed = number of trees harvested / Machine hours. Machine productivity = Machine harvest / Machine hours. System Efficiency = Machine hours / Duration of trial period. Labor Productivity = Machine harvest / (number of equipment operators * time duration of trial)
Some References
1. Barbara Hyman. 2007. Mechanical Harvesting Always advancing. Florida Grower, Today and Tomorrow. 100(12):28.
2. Kathleen A. Miller. 1991. Response of Florida citrus growers to the freezes of the 1980s. Climate Research (Clim.Res.). 1:133-144.
3. John Dick. 2007. Pruning citrus trees. Farmnote. 60(95). 4. El. B. Beuington and P. E. Bacon. 1978. Effect of hedging on the productivity of Valencia orange trees. Australian
Journal of Experimental Agriculture and Animal Husbandry. 18:591-596. 5. L. H. Aung, J. G. Leesch and J. F. Jennera. 2004. Methyl iodide and forced aeration on the post-harvest quality of
lemons. Postharvest Biology and Technology. 33:45-50. 6. L. Recchia, M. Daou, M. Rimediotti, E. Cini, M. Vieri. 2008. New shredding machine for recycling pruning
residuals. Biomass and Energy. 7. Manuela Zude, Michael Pflanz, Craig Kaprielian, Bryan L. Aivazian. 2008. NIRS as a tool for precision horticulture
in the citrus industry. Biosystem Engineering. 99:455-459. 8. K.F. Sanders. 2005. Orange Harvesting Systems Review. Biosystem Engineering. 90(2):115-125. 9. P. Chueca, C. Garcera, E. Molto, A. Gutierrez. 2008. Development of a sensor-controlled sprayer for applying low-
volume bait treatments. Crop Prot. 10. K.F. Sanders. 2005. Selective Picking Head for Citrus Harvester. Biosystem Engineering. 90(3):279-287. 11. Whitney, J. D. 1995. A review of citrus harvesting in Florida. Trans. Citrus Eng.Conf. 41:33-60

1
MECHANICAL HARVESTING
For Sajith MSc thesis
1. INTRODUCTION
Mechanization for crop production is an ongoing process in the agricultural industry.
As described by Odigboh (1999), mechanization can be done at various levels of
complexity ranging from a hand tool for simple tasks to a robot for very precise and
complicated tasks. It all started with the use of hand tools and animals for doing tasks like
tilling, harvesting, transporting etc. The advent of mechanically powered machines
relaxed the limits imposed on mechanization because of the use of animal and human
powered tools. The use of these machines is also more efficient and profitable compared
to the use of animal and human power. In the today’s context, mechanization solely
means the use of mechanically powered machines for accomplishing various tasks.
Mechanization has always been aimed at making the tasks easier to accomplish in a
limited time and with less effort which in economic terms translates to an increased
profit. But in today’s global scenario, in addition to the above goals, the economic
disparity among different nations has made mechanization very pertinent to remain
competitive in the market, especially for developed nations where manual labor is both
expensive and scarce.
Harvesting is a part of the crop production cycle which is very time consuming and
labor intensive irrespective of the crop involved. Harvesting is a sequence of smaller jobs
based on the crop involved. Using machines for a part of or the entire harvesting process
is aimed at a reduction of labor and time involved. Mechanical harvesting concept has
been pursued with vigorous interest for many crops. It has been successfully adopted for
grain and vegetable crops like rice, potatoes, tomatoes etc and also for some fruit and nut
crops like grapes, walnuts etc. For citrus, mechanically harvested acreage is on the rise
but it is still very negligible compared to the total acreage. One of the major reasons for
growers not adopting mechanical harvesting for citrus is the fear of reduction in
subsequent years’ yield because of tree damage. In this chapter, we will be briefly
discussing the citrus industry in Florida, its history and the need for mechanical
harvesting. This will be followed by the objective of this study and the organization of
this report.
2. CITRUS INDUSTRY IN FLORIDA
Genus Citrus has many fruits which we are familiar with, some of these being orange,
tangerine and grapefruit. Except for grapefruit, a hybrid of orange and pomelo created
during 1700s in the West Indies, all the other fruits are native to Southeast Asia.
Nowadays citrus is produced mostly by tropical and subtropical America along with
southern Europe, Japan, North Africa and the Near East. Annual worldwide Citrus
production amounts to about 50 million metric tons, of which more than 50% are oranges
and tangerines. The citrus fruits are an excellent source of Vitamin C and various fruit
acids. They are borne on small wiry trees which do well in the sandy soils found in south-
central Florida, southern California and southern Texas. In 1500s, citrus was introduced
in Florida. The sandy soil and sub-tropical climate of Florida proved to be ideal for
growing citrus seeds brought by the early settlers. In mid-1800s, the wild groves of
Florida were topworked with superior strains to start the commercial farming of citrus.
Currently citrus industry is one of the largest industries in Florida. According to
Florida Department of Citrus (FDOC), currently there are about 576,000 acres of citrus
groves and more than 75 million citrus trees in Florida. The citrus fruits found in Florida
are oranges, grapefruit and specialty fruit including Temple oranges, tangerines and
tangelos. In global orange juice production Florida is second only to Brazil. Florida is
also the leader in global grapefruit production. Nearly 87 percent of Florida citrus is
processed into canned, chilled or frozen concentrated juices. The Florida citrus industry
generates $9.3 billion per year with about $1 billion in tax revenues. About 76,000
Floridians work in citrus related industry. Apart from the economic impact, citrus also
has a positive impact on Florida’s environment. Researchers have found that every acre

2
of mature trees produced 16.7 tons of oxygen per year and there exist more than 159
native species within the grove ecosystems.
3. REASON FOR MECHANICAL HARVESTING OF CITRUS IN FLORIDA
Mechanical harvesting of citrus is an initiative that has its origins in the mid-1950s. It
was initially started to address the inconsistent availability of labor for manual
harvesting. The increasing acreage, along with the yields, of Florida citrus during the
1950s and 1960s required more workers for manual harvesting. To overcome these problems and to improve the efficiency of available labor, the mechanical harvesting
initiative was started. The program was spearheaded by the Florida Department of Citrus,
United States Department of Agriculture and the University of Florida. But interest in
mechanical harvesting waned when the devastating freezes in 1983, 1985 and 1989
reduced the acreage and the yields noticeably. In today’s scenario labor costs are very
vital. Florida is next only to Brazil in orange juice production but the labor availability
and cost of harvesting is drastically different for the competitors. In order to compete in
the global market and maintain profitability the harvesting costs have to be reduced and
this can be achieved by using efficient mechanical harvesters.
4. CITRUS MECHANICAL HARVESTING IN FLORIDA The mechanical picking systems that are currently used widely in Florida are the
trunk shakers and continuous canopy shakers. Both these systems have the shake and
catch mechanism. The graph in figure 1-1 shows the acreage in Florida where citrus was
harvested by trunk shaker and canopy shaker. From the graph, it can be seen clearly that
the trunk shaker is losing to canopy shaker in terms of acceptance by the citrus growers.
In 2004, because of 3 hurricanes there was a decrease in the acreage harvested by the
mechanical harvesters. In 2007, the total acreage of citrus groves harvested by
mechanical means was 35633 acres, which is a little more than 5% of the total acreage of
citrus in Florida. This illustrates the fact that though the use of mechanical harvesters is
on the rise, the growers are reluctant to use them.
TSC – Trunk Shake and Catch CS – Canopy Shaker
Figure 1-1. Mechanical harvesting of Citrus in Florida (Data provided courtesy of Dr. Fritz Roka, SWFREC Univ. of Florida, Immokalee and Mr. Sandy Barros, Florida Department of Citrus.)
0
5000
10000
15000
20000
25000
30000
35000
40000
2000 2001 2002 2003 2004 2005 2006 2007
Years
A
c
r
e
s
TSC
CS

3
5. OBJECTIVE OF THIS STUDY
The reluctance of the growers to accept mechanical harvesters is due to their fear of
reduced yield because of their continuous use. A better understanding of the tree-
harvester system will help allay their fears and can also help increase the efficiency of the
harvesters. This report is about the study done using the continuous canopy shakers to
investigate the nature of distribution of force in the canopy of the trees during harvest.
There are two types of parameters that affect the fruit detachment force (FDF) in different
parts of the tree canopy. One consists of natural parameters like level of maturity,
position in the tree and weight and size of fruits. The other parameters are the machine
parameters which affect the force distribution in the tree such as angle of tines, speed and
frequency of the shaker. In the initial part of this study, field experiments were conducted
to investigate the force distribution. The later part consisted of developing a model to
predict the force at different points in the canopy.
6. REPORT ORGANIZATION
Chapter two is about the history of mechanical harvesting of citrus in Florida and the
literature review. It also has section about the role of this research in the overall scenario.
Chapter three is about the materials used for the experiments involved in this study. The
different setups used are described here and are then referred to during the discussion of
the experiments. Chapter four is about the two field tests conducted. First one was to get
an idea about the distribution of force throughout the canopy. This field test was used to
identify the potential determining factors that could affect the force distribution. Based on
this test, the second experiment was designed. These field experiments were conducted
using the tractor drawn canopy shaker (TDCS). Chapter five gives details about the finite
element model for the force distribution along a branch in the canopy. This was then
validated using the field experiment data. The analysis and validation is explained in this
chapter. This chapter also has details about the experiment for determining the physical
properties of the citrus wood. Chapter six has the conclusions from this study and the
direction of work from here on. The appendices give additional information about some
of the methods and programs used in this study. More details about the sensors,
communication and analytical model are provided here in order not to deviate from the
main discussion in the chapters.

4
7. HISTORY AND LITERATURE REVIEW
The use of implements for the cultivation of crops was found necessary from the
beginning of cultivation to make the job easier and faster to accomplish. Oldest
implements used were pointed ones for digging and sharp ones for harvesting. Current
hand tools like rake, trowel, scythe and animal drawn plows and hoes are modifications
of primitive tools. Nowadays, large-scale farming methods usually involve machines
powered by diesel- or gasoline-fueled internal-combustion engines, which drive different
agricultural implements designed for various stages of farming. Farmers now rely heavily
on specialized technology at all stages of crop production to sustain and increase
production. For harvesting, the earliest machine invented was the mechanical reaper
marketed by Cyrus McCormick in the early 1840s. This was designed for harvesting
grain crops only. Harvesters for root and vegetable crops were not invented until the
1930s. For fruit crops, harvesting in general can be divided into functions such as
detachment and removal; control, cleaning and selection; conveying and loading (Ruiz-
Altisent and Oritz-Canavate, 1999). To successfully mechanize the entire harvesting
process, a system has to accomplish all these tasks. Most the harvesting systems have
multiple stages and different machines for each of them. A picker is generally associated
with the tasks of removal and cleaning, while a truck is associated with the movement of
the harvested fruit from the picker to a trailer in the grove.
There has not been a lot of change in picking of citrus from the early years of
commercial production of citrus. Harvesting of citrus is mostly manual, even for the
process oranges, in Florida. Workers hand pick fruits from the tree, using ladders for
those that are on higher branches. These fruits are then transported, by specialized
tractors used in orange groves called “goats”, from the containers to the trailers. During
the last 50 plus years there has been a significant amount of research done to mechanize
the harvesting of citrus fruits. There were many projects pursued relating to this area. In
this chapter we will discuss mechanical harvesting in general followed by a brief history
of mechanical harvesting of citrus and its impact on the current scenario. The final
section will be about some literature that is relevant to this study.
8. MECHANICAL HARVESTING
Mechanical harvesting has been successfully adopted for many crops including some
fruit crops. Harvesting method varies from crop to crop and so specialized harvesters are
needed for different types of crop. Harvesters are available for many of the grain crops,
vegetables, forage crops, and for some fruit crops. For grain crops, harvesting is a process
of cutting and threshing the harvested crop to separate the grain from the stalk. The
harvesters for forage crops also work in a similar way but for the threshing process,
which is replaced by baling for grasses and a cutter for forage cereals. For vegetables,
harvesting is a more complex process and the operations are based on types of
vegetables. For root crops harvesting is accomplished by digging as in the case of
potatoes or pulling as in the case of leeks. For surface crops cutting (cabbages), combing
(green beans, peas), stripping (cucumbers, de-stemming onions), shaking (tomato) and
threshing (peas from their pods) operations are used based on the crop being harvested.
These operations are used in combination to first remove the required section of the plant
(cut the upper portion of the plant) and then isolate the fruit from the leaves or stem (de-
stem the onions or shake the tomatoes free).
Mechanical harvesting of fruits is mostly done for process industry. Small fruits and
wine grapes are harvested by a combination of contact and non-contact methods. The
small fruits like strawberries, raspberries etc. are harvested using a combination of
shaking and soft combing. This is accomplished by using oscillatory motion of drums
with fingers or spikes to apply a shaking effect on the plants. Grapes are harvested using
straddle type (over the row) harvesters which shake the vines to remove the grape clusters
from them. They use horizontal rods to shake the vines with frequencies ranging from 10
to 20 Hz. For tree fruits and nuts, the most common method used for harvesting is the
shaking of the trees which causes vibration of the fruit. When the fruit vibrates, it
experiences traction, twisting, bending and shear forces. It also experiences fatigue
effects because of the repetitive action (Ruiz-Altisent and Oritz-Canavate, 1999). These

5
forces result in development of stresses at the point of contact, either at the stem-calyx or
at the branch-stem junction which cause the removing of fruits from the tree. Along with
the forces, the acceleration applied to the fruit is also significant as the changing
acceleration causes a snapping effect resulting in the fruit’s detachment. Figure 2-1
illustrates some of the forces experienced by the fruits because of the shaking of trees.
Citrus, prunes, apples, olives, almonds etc. are currently harvested using different type of
shakers.
Figure 2-1. Forces on fruit when the tree is shaken.
Apart from the machines used for harvesting, there are mechanical aids available
which make manual harvesting more efficient. These aids are used for vegetables
(lettuce, cauliflower etc.) and also for fruits (melons, pineapples, oranges etc.). For the
fresh fruit market, mechanical picking of fruits is not desirable as this affects the quality
of the fruit. One-man self-propelled platforms and multi-level picking platforms are two
of the mechanical aids used for the picking of fruits, while the rest of the harvesting
process is mechanized.
9. HISTORY OF MECHANICAL HARVESTING OF CITRUS IN FLORIDA While harvesting, citrus fruits are first removed from the trees and then moved out of
the groves to the processing plant or packinghouse for fresh fruit market. Based on this
observation, the harvesting is broadly divided into two operations
1. Picking the fruit from the trees, and; 2. Transporting the fruits to either the packinghouse or processing plant.
Attempts to mechanize were done separately for the two steps as they had different
levels of complexity. The collection of the harvested fruit at a single location and then
moving them out of the groves was simpler than picking the fruits from the trees by
mechanical means. So the second of the two harvesting operations was mechanized early
and also with relative ease when compared to the picking operation. The table 2-1 shows
the brief chronology of mechanical harvesting of citrus.
Table 2-1. Chronology of citrus mechanical harvesting.
Year Developments 1950s Investigation into mechanization attempts
Mechanical handling equipment Harvesting aids
Early 1960s Focus on development of mass harvesters Late 1960s and 1970s Research to improve the harvesters
Studies to simulate tree and/or fruit-stem Early 1980s Some research in analysis of tree-harvester system Late 1980s Robotic harvesting research 1980s - 1990s Research in mechanical harvesting reduced 2000s Renewed interest in mechanical harvesting
Renewed interest in robotic harvesting
10. HANDLING OF CITRUS In the 1950s the second of the harvesting operations was mechanized reducing the
labor required by at least two-thirds. Mechanization of citrus handling (Hedden and
Churchill, 1984) was started with the use of two wheeled trailers. They were used for
both fresh fruit and process fruit handling. For fresh fruit handling, the trailers were
loaded with the fruits by using farm tractors and these trailers were hitched together, 5 or
6 at a time, to be taken to the packinghouses. For process fruit handling, a trailer or truck
mounted basket elevator system was used with the two wheeled trailer system. The

6
standard field box was used to dump the fruits into the truck by two loaders. In the late
1950s, the pallet bin and tractor fork-lift system used in deciduous fruits was adopted for
fresh citrus fruit handling in Florida, after several modifications done to the system. At
the same time a grapple type pick-up head was developed for the loader boom used in the
handling of processing fruits. The loader boom was mounted on a high-lift truck next to
the driver and could be made to lift and dump fruits. Another system was developed in
the late 1950s which consisted of a tractor with a front end loader and dump attachment.
Field handling systems using farm tractors and trailers, front-end loaders or fork-lifts
were never adopted to as large an extent as the truck-mounted loader-boom. This was
because the truck mounted equipment does not need any supplemental transportation to
travel from one grove to another at highway speeds.
Some of the fruit collection schemes were based on vacuum system of fruit handling.
One such system had the fruits to be transferred to the closed cylindrical hopper by the
picker and then they were dumped directly into a roadside truck by the vacuum system.
Other types of fruit handling systems developed were the windrow pickup machines.
These machines were developed specifically for the Florida conditions and they were of
two types. One was to pickup fruits from the windrow in the center of the row and the
other to pickup fruits from the windrow under the tree drip-line. A high-list truck was
used along with the pickup machines and the fruits were transferred to the truck that was
usually towed behind the pickup machines.
11. HARVESTING AIDS
While the handling of citrus was being mechanized, studies were being conducted to
improve the efficiency of picking fruits from the tree. The initial work was mostly
concentrated on improving the efficiency of hand harvesters. Time and motion studies
(Jutras and Coppock, 1958) were conducted on hand harvesters to understand where most
of the time was being spent and how to improve their efficiency by reducing this time.
These studies showed that the hand pickers spent 25% of their time in non-productive
activities or activities that were other than picking fruits. To cut down on this non-
productive time, different scenarios were investigated to design harvesting aids. Different
types of harvesting aids (Coppock and Jutras, 1960) were studied and evaluated to make
hand harvesting more efficient and partially mechanize harvesting. The study of mobile
picker’s platform was one such effort to partially mechanize the picking of fruits. The
study indicated that the use of the mobile picker’s platform increased the productivity of
workers by 40% when compared to the conventional method. Another effort was the use
of bag and ladder to simulate the ground conditions. Though different kind of harvesting
aids were investigated and developed which increased productivity, they were not
economically very advantageous over conventional methods of picking. This shifted the
focus to the removal of fruits from trees by machines.
12. CONTACT HARVESTING
In 1960s, some of the initial efforts to mechanize the picking of fruits were towards
the development of machines that could duplicate manual harvesting. The reason for
these studies was the development of one system that could be used for both process and
fresh market oranges. Such a system could be very useful for the Florida citrus industry
by reducing the picking costs. One of the earliest such effort was the development of an
auger based mechanical picker (Lenker, 1970). This system used a set of augers that
entered the tree canopy and removed the fruits by a rotating motion of the augers. The
harvest trials done using a prototype resulted in only 65% fruit removal. Later Chen et al
(1982) developed a contact harvester based on flexible fingers to harvest mature fruits
selectively. Though it had mature fruit removal of 85 to 90%, tree penetration was still a
problem. Such results did not economically justify the use of these machines. Because of
these reasons, focus shifted away from contact harvesting and more towards mass
harvesters like trunk shakers.
13. MASS FRUIT HARVESTERS
Beginning in early 1960s, development of mass fruit harvesters was investigated.
These machines were intended for use of harvesting oranges for processing industry only,

7
which also required bulk of the labor requirements. Research and development was done
on trunk shakers, limb shakers, air shakers and foliage (canopy) shakers. These studies
were coupled with development of catch frames for the harvested fruit so that it can be
collected and later transported easily. Amongst the aforementioned mass harvesters,
continuous canopy shakers are the recently developed mechanical harvesters. One of the
earliest studies done regarding its development and design was in late 1990s by Peterson
(Peterson, 1998).
Initial studies (Coppock, 1961) were done to study the manual picking methods.
From these studies it was concluded that the fruits can be removed by rotating them or by
shaking them. The shaking concept had been used in harvesting nut crops and was then
being used for harvesting prunes and peaches for processing. One of the initial inertia
shaker to harvest citrus was designed based on the one developed by University of
California-Davis for harvesting prunes. The system was customized for citrus crop as
there were physiological differences between the crops. Some of the earliest developed
mass harvesters were primarily trunk and limb shakers. The shake and catch system
developed by the University of California and United States Department of Agriculture
(USDA) was one of the earliest shakers which used the inertia type limb shaker system.
There were studies conducted about the efficiency of these systems which was found to
be pretty low. This was because of the low fruit removal and also the reduction of yields
in the subsequent years. There was a 5 year study conducted by Hedden and Coppock
(1968) about the reduction in yield because of persistent use of mechanical pickers. The
reduction in yield was very pronounced in the Valencia type during the mid-season and
late-season harvesting. This called for a method to selectively harvest the mature fruits to
reduce the impact of future yields.
There were a couple of biophysical studies done about the Valencia type to come up
with an approach to selectively harvest the mature fruits. The outcome of this research
was that the shaking of the fruit bearing region of the tree, namely the canopy, would be
more effective and also the use of a chemical to loosen the mature fruits would help in
selective harvesting. Abscission chemicals similar to the ones produced naturally by the
mature fruits were developed for the selective removal of mature fruits. The use of the
abscission chemicals along with the different shakers was investigated. Though the
efficiency of the shakers was better, there were many problems because of wind, rain and
other environmental factors affecting the influence of these chemicals on the fruits.
Furthermore, there was no reliable way to spray uniformly throughout the canopy so that
the fruits would be removed by less force application. The research is still on-going to
make the chemical commercially available.
In 1970s the vertical foliage shakers and air shakers were designed and developed.
These systems applied force to the canopy, which is the fruit bearing region. Comparative
trials (Hedden, 1971) using foliage and limb shakers showed that the foliage shakers had
better selectivity. Though this was encouraging, during the late season harvest
considerable amount of young fruits were removed. It was also noticed that the fruits for
the next year were bruised. The air shaker (Whitney, 1968 and Whitney and Patterson,
1972) did not come in contact with the fruits and was supposed to reduce the fruit
bruising. But this system was only efficient when used along with the abscission
chemical and even in that case it caused defoliation and peel damage. There were
comparative studies (Coppck et al, 1981) done with these shakers to understand the type
of shaking action required to increase their efficiency. In late 1990s a prototype similar to
the current canopy shaker was designed and developed (Peterson, 1998). Harvest trials
indicated a removal efficiency ranging from 80 to 90% which could be improved by
changing the configuration of the system and finding optimal operating parameters.
Now that the fruit can be picked off the tree by a machine, a system was required to
catch these fruits and transport it. The handling equipment for fresh fruit market could be
used but with some modifications. Based on the fruit handling, the mechanical pickers
were classified into two categories. One category was of those which dropped the fruits
onto the ground. These fruits were then deposited by machines into goat trucks or bins
and later transferred to hauling trailers. Other category had catch frames which caught the
harvested fruits and deposited them in bins or directly into goat trucks following them.
The design and development of these pick up machines (Churchill et al, 1984) and catch

8
frames (Coppock and Hedden, 1968) were done simultaneously with the mechanical
pickers.
14. ROBOTIC HARVESTING
Since the mechanical pickers were developed with good efficiency (about 90% of
mature fruits) for processing fruits, study and development of systems for picking fruits
for fresh fruit market was started. With the advancement in technology, robotic fruit
harvesting was investigated for picking fruits for fresh fruit market. One of the earliest
studies was done by Parrish and Goskel (1977) to identify the location of fruits using a
camera. They developed a rudimentary system that picked apples from a tree model in a
laboratory. For citrus, robotic harvesting research was started in early 1980s at University
of Florida. The capability to see and recognize the citrus fruits was shown by this
research but it was discontinued because of lack of funds. In the new millennium,
renewed interest in the robotic harvesting has called up for further research into this area.
Using real-time image processing, the fruits could be identified and then picked by a
robotic arm. Research is on-going in this field and though some researchers had
developed prototypes as early as in late 1980s and early 1990s, these systems are not yet
commercially viable. Some of the major obstacles are the recognition of fruits that are
deep in the canopy and the movement of the robotic arm around the limbs.
15. CURRENT MECHANIZATION IN CITRUS HARVESTING
Over the time many researchers have summarized the development of mechanization
in citrus fruit harvesting (Whitney and Sumner, 1977; Whitney and Harrell, 1989; Brown,
2002; Sanders 2004). It is evident from this literature that for fresh fruit market, the
mechanization is limited to handling and transporting of fruits from the grove to the
packinghouse. This is done using the bins into which the workers place the fruits; goat
trucks to transport the fruits from the bins to trailer; and finally the trailer to transport it to
the packinghouse. As for processing fruits, commercial mechanical harvesting machines
are available now. In Florida, the mechanical harvesters used are
1. Trunk shake and catch, 2. Continuous canopy shake and catch, and, 3. Tractor drawn canopy shake
16. TRUNK SHAKE AND CATCH (TSC)
The TSC system (figure 2-2) attaches to the trunk of a tree and shakes for 5 to 10
seconds. The fruits are collected in an attached receiver which when full is transferred to
a goat truck. The fruit removal is 95% at a harvesting speed of 235 tree/hr with labor
productivity of 90 box/hr (for each crew member).
Figure 2-2. Trunk Shake and Catch (TSC). (Source: http://citrusmh.ifas.ufl.edu/index.asp?s=2&p=3. Last accessed July, 2009).
17. CONTINUOUS CANOPY SHAKE AND CATCH (CCSC)
A CCSC system (figure 2-3) moves along the row at 1 to 2 mph and shakes the trees
along the rows. The fruits are caught by the catch frame and conveyed to the following
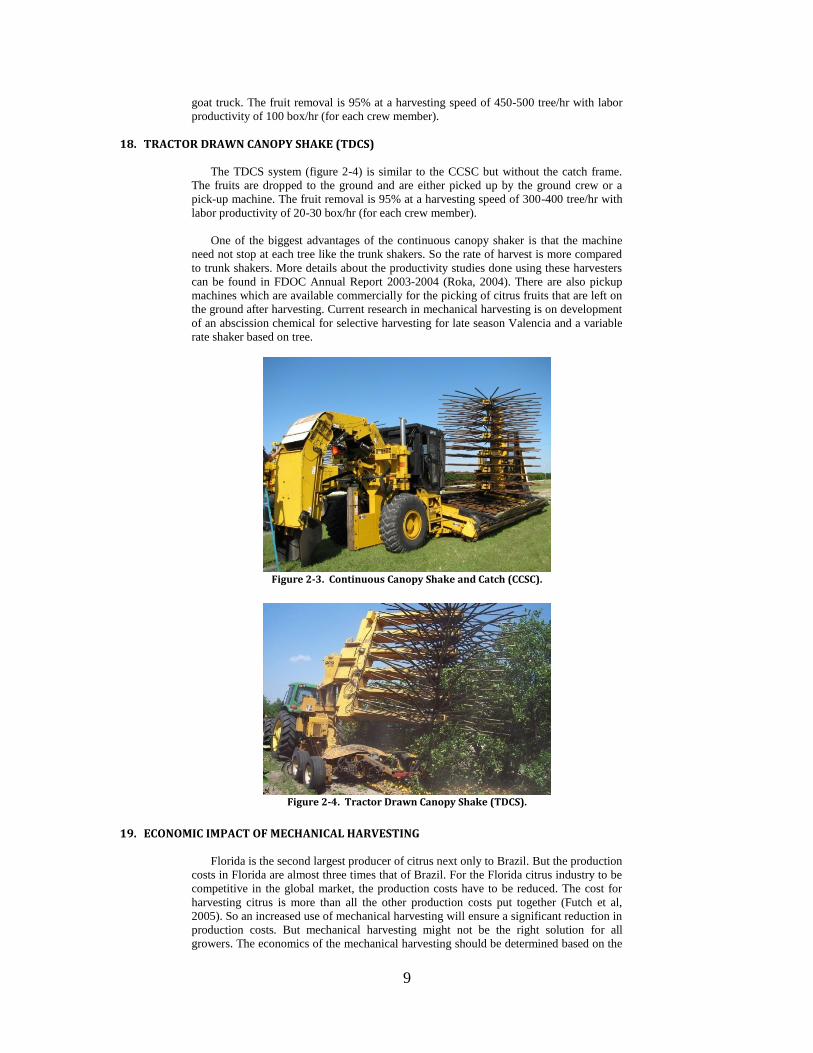
9
goat truck. The fruit removal is 95% at a harvesting speed of 450-500 tree/hr with labor
productivity of 100 box/hr (for each crew member).
18. TRACTOR DRAWN CANOPY SHAKE (TDCS)
The TDCS system (figure 2-4) is similar to the CCSC but without the catch frame.
The fruits are dropped to the ground and are either picked up by the ground crew or a
pick-up machine. The fruit removal is 95% at a harvesting speed of 300-400 tree/hr with
labor productivity of 20-30 box/hr (for each crew member).
One of the biggest advantages of the continuous canopy shaker is that the machine
need not stop at each tree like the trunk shakers. So the rate of harvest is more compared
to trunk shakers. More details about the productivity studies done using these harvesters
can be found in FDOC Annual Report 2003-2004 (Roka, 2004). There are also pickup
machines which are available commercially for the picking of citrus fruits that are left on
the ground after harvesting. Current research in mechanical harvesting is on development
of an abscission chemical for selective harvesting for late season Valencia and a variable
rate shaker based on tree.
Figure 2-3. Continuous Canopy Shake and Catch (CCSC).
Figure 2-4. Tractor Drawn Canopy Shake (TDCS).
19. ECONOMIC IMPACT OF MECHANICAL HARVESTING
Florida is the second largest producer of citrus next only to Brazil. But the production
costs in Florida are almost three times that of Brazil. For the Florida citrus industry to be
competitive in the global market, the production costs have to be reduced. The cost for
harvesting citrus is more than all the other production costs put together (Futch et al,
2005). So an increased use of mechanical harvesting will ensure a significant reduction in
production costs. But mechanical harvesting might not be the right solution for all
growers. The economics of the mechanical harvesting should be determined based on the

10
difference from the hand-harvesting costs rather than the absolute costs. The initial
changes to the design of groves are required for mechanical harvesting to be
economically favorable. The web-based spreadsheet designed by Dr. Roka
(http://citrustool.ifas.ufl.edu.) can be used by growers to determine whether the use of
mechanical harvesting is profitable or not. For example, the net grower gain for a
scenario where the difference between manual and mechanical harvesting is $0.25 with
fruit recovery of 98% and a yield of 400bx/ac with delivered-in price of $5/box is
$62/acre. This example shows the net gain by shifting to mechanical harvesting but does
not include the initial costs involved. Including the initial costs for adapting the groves to
mechanical harvesting, increased returns can be seen in 1 to 3 years based on the grove
conditions.
20. KNOWLEDGE GAP
Continuous canopy shaker is the latest addition to the family of mass harvesters
developed for citrus harvesting. The development of the system and the determination of
the optimal machine parameters for harvesting different varieties were not based on any
theoretical background. The machine operators use their experience to harvest the fruits.
This has left a big gap in our understanding of these machines and how to make them
more efficient. Since this machine has multiple contact points on the tree that constantly
change, it is virtually impossible to develop exact equations for its interaction with the
tree. But from the literature presented in the next section, we can see a lot of studies done
using finite element method and beam theory to understand the tree-harvester interaction
with single point of force application. A similar approach could be used to understand
these machines and their interaction with the trees during harvest. As a first attempt
towards the goal of understanding the canopy shaker-tree interaction, this study tries to
investigate whether we can predict the forces for a simplified case. The important
assumptions and constraints under which the current study has been done are
1. Constraints: a. Machine does not move. b. Tines are kept parallel to the ground. c. Defoliation and trimming of the trees.
2. Assumptions a. Points of contact are same throughout the shaking duration b. All the energy is transferred from the machine to the tree c. The acceleration in un-interested parts of the trees can be neglected.
Though we have tried to make the system as ideal and simple as possible, we still
expect discrepancies which will throw the results off. Further discussion on the
development of the model and validation experiments can be found in chapter 5 of this
report.
21. RELATED LITERATURE
Over the years many researchers have analyzed and studied the dynamics of tree
when different mechanical harvesters are used on it. But there is not much research done
using the continuous canopy shaker. This is because canopy shakers are relatively new.
Better understanding of the interaction of harvesting machines and tree canopy during
harvest could help improve the existing canopy shakers. This could be done by measuring
and analyzing the force distribution in the canopy under real or simulated harvesting
conditions. There are many factors that might affect the distribution of force in the citrus
canopy and it is virtually impossible to study the effect of all these factors together. So a
set of factors have to be identified and their effect studied on the distribution of force in
the citrus canopy. In this section we will be discussing some literature that is relevant to
this study. The literature presented here was used to identify some of the parameters that
were used for experiments and model development. Though the literature involves
different mechanical harvesters and sometimes even different types of fruits, there are
many factors which are common and could prove to be important for this analysis. The
identified factors were then reduced to the relevant and manageable subset to complete
this study within the given constraints.

11
The basic principle behind the removal of fruits from the trees mechanically can be
summed up as “fruits can be harvested by shaking them and developing an inertial force
on the fruits that is more than the bonding force between the stem and fruit” (Fridley and
Adrian, 1960). Traditionally, fruit removal force has been determined by measuring the
amount of axial force required to remove a fruit from the stem (Burns, 2006; Whitney,
2000). But in the case of a mechanical harvester based on the shaking principle, the force
is different as it does not simulate the hand picking operation. Based on the shaking
principle, different types of mechanical harvesting systems were developed during 1960s
and 1970s as was discussed earlier in this chapter. Starting from 1960s to the present
time, there have been researchers who have looked at the characteristics of these different
mechanical harvesters and also the crop characteristics to increase the efficiency of
harvesters. Some of the earliest studies were about harvest trials done on different
varieties of citrus and other fruits to study the effect of mechanical harvesting on next
year’s crop and the effectiveness of fruit removal.
Markwardt et al (1964) did harvest trials using a limb shaker on cherry trees. Apart
from harvest efficiency and yield; the removal of fruits with twigs, immature fruit
removal, fruit quality and bark damage was also evaluated. Because of the removal of
immature fruits, a feasibility study for selective harvesting of cherries by repetitive
harvesting of fruits at different times of harvesting season was done. This proved to be
detrimental to the quality of next year crop as well as the late harvested cherries because
of the damage caused by repeated mechanical harvesting.
Whitney et al (1973) studied the effect on Valencia oranges’ yield because of using a
vertical foliage shaker for harvesting. The selected trees were mechanical harvested in
1972 and hand harvested in 1973. The yield reduction and effect of different types of
stroke and shake duration on the yield was analyzed. Whitney et al (1975) designed a
foliage shaker and studied the effect of different shaking modes on Hamlin and Valencia
oranges. They concluded that the yield reduction was less for sinusoidal stroke and also
when the duration was 10 seconds when compared to 20 seconds. In Valencia, they found
that late harvesting damaged/bruised the young fruit left on the trees. Limb shakers were
used by Sumner and Churchill (1978) on Hamlin limbs to study the effectiveness of
different types shaking motions. They also did field tests to determine the selective
removal of Valencia during the late harvest season. They conducted these tests with and
without abscission chemicals. They concluded that a smoother action was better and
reducing the fruit pull force using abscission chemical increases the effectiveness of the
harvesters.
Study using different air shaking patterns in air shakers on Pineapple, Queen and
Hamlin trees was done by Whitney (1978). Different air shaker patterns were generated
using different configuration of the plates (center pivot, wobble and upstream pivot
plates) in the system. The center pivot plate, having a more definitive air pulse and
greater air shaking impulse, was found to be far superior to the others. Trunk shakers
were also used in a similar study by Hedden et al (1984) on Valencia and Hamlin trees.
They used different modes of shaking (linear and multidirectional shakers) to determine
their effectiveness. This study was done for four years from 1981 to 1984. They
determined that the use of abscission chemical increased the percent fruit removal and
there was a reduction in yield of Valencia because of the use of both abscission chemical
and mechanical harvester as immature fruits were removed during late season harvest.
There has been considerable research done in the modeling of fruit-stem system and
branches of trees so as to analyze the force on them when using mechanical harvesters.
But this work has not been done on citrus trees and specifically not with the use of
continuous canopy shakers as the mechanical harvesters. The second part of the thesis
was to extend the ideas used in the development of analytical models from earlier
research to our scenario. The validation such a model was done using field experiments.
Researchers had always been interested in modeling of either entire or part of trees and
fruit-stem subsystem to simulate the mechanical harvesting conditions. There were
basically two different types of approached followed. One was the empirical approach,
where experiments were conducted and a model derived based on the experiment input
and output values. The other approach was to theoretically derive equations based on

12
some assumptions to simplify the problem and then solve these equations using computer
program. Both these approaches required validation after the development of the model.
Some of the papers were not involved in the actual development of a model but still
studied the force transmission and related factors. During their harvest trials, Markwadt et
al (1964) concluded that since the force was applied at only one point of the tree the
energy had to be transmitted from that point through the branches of the tree. This energy
transmission varied according to the point of attachment and also the characteristics of
tree such as branch diameter and length and the weight distribution of the tree.
Some of the early experiments done to model the behavior of limbs were done in
1960s. Adrian et al (1965) used an olive branch from a tree and rigidly mounted it in the
lab. They studied the effect of the clamping location on the amount of force required to
remove the fruits. They concluded that the force and power required increased as the
location was moved towards the fixed end of the branch. Wang (1965) modeled the
coffee cherry plant as a spring-mass system and described a series of equations to
determine the natural frequency of the coffee plants. A mechanical harvester designed
based on the study was used to conduct some experiments to determine whether selective
harvesting was possible or not. In the studies done by Wang, the damping properties of
tree were not considered. Lenker and Hedden (1968) tried to experimentally isolate the
limb factors that had an effect on fruit removal using 6 limbs from Valencia trees. They
concluded that the limb displacement was directly proportional to the fruit removal. They
were also able to arrive at a regression equation to predict the yield based on the factors
selected. These regression equations were able to predict the removal pretty well. Later
on in 1990, Whitney et al conducted experiments using a Cypress wood post to validate
the mathematical developed for predicting the displacement and force at various points.
The conclusion was that though the model’s prediction was good but a more complex
model would be better suited for this prediction. Another study by Diezma-Iglesias
(2005) tried to correlate the vibrational characteristics of the branches to the fruit
removal. Though they had high correlation in the laboratory tests, the complexity in trees
caused problems in the field tests.
Researchers who worked on developing theoretical models based on assumptions
have used different theories to model the limbs. The selection of the theory was based on
the complexity of the system to be described and the difficulty of the equations to be
solved. The complexity was reduced by making some reasonable assumptions. Apart
from the modeling of trees, there has been work done on determining the factors of
mechanical harvesters using theoretical assumptions. Adrian and Fridley (1966) used the
fundamental vibration theory to present the design criteria of inertia-type shakers. They
were able to predict the different parameters of the machine (mass ratio and eccentricity)
to develop the required stroke and also the power requirements for that stroke and
frequency.
Studies were done using beam theory to describe the limbs by modeling them as
cantilever beams of varying properties along their length. The differential equations were
then solved by finite element method using a computer program. Fridley and Lorenzen
(1965) investigated the simulation approach to solve the tree shaking problem. The
objective of their study was to investigate the possibility of using an analog computer for
simulating the shaking of tree limbs. They used a four cell simulated beam and studied
the forced vibrations under the assumption that the Timoshenko beam theory was
sufficient for predicting the behavior of the shaking tree limb. They simulated the
application of force at different locations to observe its effect at different parts of the tree
limb. Since they used only four elements, the error in finite element approximation was
high which could be reduced by increasing the number of elements used for the
simulation. Schuler and Bruhn (1973) applied the damped Timoshenko beam theory to
vibrating limbs. They did the study using cherry tree limbs and compared the acceleration
and displacement values from the experiments with the theoretical results. They did
experiments with and without leaves and concluded that it made little difference to the
tree limb response. The comparison had good correlation at lower portions (fixed end)
than the upper portions (free end) of the limb. This discrepancy was attributed to the
torsion effects caused by the nonsymmetrical distribution of the branches. Yung and
Fridley (1975) developed a finite element model for the entire tree using simple beam

13
theory and assuming that the tree limbs are truncated conical beams with the length and
curvature very large compared to their diameters. They developed a computer program
for these equations and compared the experimental values against the calculated values.
They concluded that the values were in good agreement and used the model for analysis
of a later experiment. They also studied the transmissibility of force along the branches of
the trees and its effect on the harvesting efficiency and frequency to be used. They
concluded that stiff branches transmitted the force better than the flexible ones since they
acted as dampers. The resonant frequency of fruits could be used to harvest the trees with
stiff branches while it was not the case with limber branches. It was observed that
branches having bigger diameters have better transmissibility because of their stiffness.
Upadhyaya et al (1981) did a finite element analysis for limb impact harvesting. The
model was developed to include small twigs and leaves which added damping to the
system. Bernoulli-Euler beam theory was used to model the limbs with twigs and leaves.
An experimental study was done and the values were found to be in good agreement with
theoretical values calculated from the model.
In some cases the finite element analysis was not favored because of its complexity
as was done by Philip et al (1970). They modeled the tree as a system of cantilever beams
attached to each other. The small branches were also modeled as cantilevers. These
beams had mass and stiffness properties which varied with position along them. A set of
differential equations were derived for this system of cantilevers using Euler-Bernoulii
flexure theory. These equations were programmed to be solved by a computer. They used
standard values for properties such as specific weight, modulus of elasticity and
Poisson’s ratio, which do not vary from species to species. They also proposed that the
size and configuration might follow a statistical pattern which can be then used to model
a standard tree for a specific species. Rayleigh-Ritz analysis of a simple limb was used
instead of finite element analysis because of its ease of use. The model was validated
using data from two experiments conducted by other researchers, one done on an actual
Olive branch by Adrian and another done on a branched steel beam by Delattrez. From
their comparisons they were able to conclude that the computer calculated values were in
good agreement with the experimental results available. From their simulations, they
concluded that branches with too many bends and splits did not transmit the force
effectively.
Apart from beam theory, there were other approaches, like the Lagrange’s equations
and spring-mass system were used as described in the following literature. Hussain et al
(1975) studied the tree limb response to intermittent excitation of the branches instead of
clamped excitation. They used Lagrange’s equation of motion to calculate the theoretical
values for limbs. The limbs were again assumed to be cantilever beams with varying
material properties along the branch. The natural frequency calculated from the model
was comparable to the theoretical value. They concluded that the intermittent excitation
produced higher accelerations than the conventional methods used at that time. It was
also observed that applying this kind of excitation closer to the fruit bearing regions
would make removal more effective and efficient. Ruff et al (1980) did an analysis of the
air-suspension stem-vibration strawberry harvesting concept using Lagrange’s equations.
The set of differential equations were solved numerically and the predicted mode shapes
and natural frequencies derived. The comparison of the predicted and experimental
values gave a good correlation value. It was concluded that the fruit mass, stem length
and air velocity had more influence than the stem mass or stiffness on the dynamic
characteristics of the model. Upadhyaya et al (1981) did a series of studies on impact
harvesting of fruits. They developed a spring-mass-damper system to study the dynamics
of the tree when harvesting is done using tree trunk impact. The single degree model was
developed to approximate the above harvesting. This model was able to predict the
dynamic behavior of the tree reasonably well at the time of impact and just after the
impact. This model was also used to estimate the physical parameters of the tree. One of
the equations from this model gives an estimate of the energy transfer which could be
used for correlating with the fruits removed.
While developing all these theoretical models, the damping characteristics of trees
were considered very important. These characteristics determine how well the force was
distributed to different parts of the trees. In 1970 and 1971, Hoag et al did studies about
these damping characteristics. Hoag et al (1970) studied the effect of external and internal

14
damping on the dynamic response of tree limbs. In this study they used an instrumented
Olive branch to record the acceleration and displacement values when it was shaken.
Using the physical properties from previous experiments and the force information from
this current one, the acceleration and displacement values were also calculated. These
values were compared and analyzed. From the analysis, it was concluded that the
damping increases with frequency when there are no leaves. It was also noticed that the
external damping of the wood was only due to the leaves present and in their absence
external damping could be ignored. Later Hoag et al (1971) did an experiment to
determine the damping properties of tree limbs which would be useful for analysis when
studying the feasibility of selective harvesting. They used almond wood in varying states
of moisture content (from 70% moisture content wood to oven-dried wood). They
observed varied logarithmic decrement of damping with different moisture contents.
They also observed that the external damping was due to drag by the leaves, and that it
could vary with the changing interaction of the leaves. The air damping of the wood itself
was observed to be negligible.
Though Hoag et al did trials to determine the damping properties, these experiments
were not done on entire tree but on samples of the wood. If these results were used then
the energy requirements of a shaker were considerably different from the actual values.
Horvath and Sitkei did a couple of studies on the energy requirements of the shaker based
on the entire tree-soil mass system. Horvath and Sitkei (2001) studied the energy
consumption based on different operational conditions. They considered the tree and the
soil-root body as the entire system instead of the tree alone and built a mechanical model.
They included the lateral and tilting motion of the tree also apart from the elastic
deformation of the trunk in the model. Three different inertia-type shakers were used for
the experimental study and to study the relation between the acceleration, trunk diameter
and the attachment point. They concluded that the power requirement and the total
displacement were dependent on the attachment height of the trunk shaker. Horvath and
Sitkei (2005) conducted a study to determine the damping properties of the entire tree
instead of just the wood samples from the tree as done by Hoag et al. They considered the
root-soil mass, trunk and the canopy as the components of the vibrating tree system.
Since all the three components had different damping properties, they were determined
separately by using the logarithmic decrement method. They used three different inertia-
type trunk shakers for this study. A direct energy method was used for the damping
properties of the soil while common hammer test and later initial displacement test were
done to find the damping properties of the canopy and the trunk. They observed that at
low attachment heights, most the energy was absorbed by the soil. In the case of the
canopy, they observed very high damping properties which were not completely
explained by the air resistance alone. They assumed that it may be because of the many
small branches and leaves in the tree. It was concluded that the power consumption of the
trunk shakers depended on the attachment heights.
Though there were harvest trials done in citrus using vertical foliage shakers in
1970s, one of the earliest studies using a canopy shaker similar to the current machine
(design and field trials) was done by Peterson (1998). He developed a prototype canopy
shaker for process oranges and conducted field trials. The initial phase of this research
concentrated on development of a shaker while the later part was about the development
of the catching and conveyor system. Harvest trials were used to decide on a possible
frequency for effective harvesting of oranges. It was noted that 5Hz was the best effective
fruit removal frequency. It was also concluded that additional research is needed to
decide upon the optimum configuration of the system and also the operating parameters.
This study tries to use the current version of continuous canopy shaker and study the
force distribution in the canopy during harvest. This distribution for different operating
parameters can be then used to determine the optimum operating parameters for different
types of trees.


























