Модел за разпространение на добри практики в областта на КСО в машиностроителния бранш
Upload
khangminh22Category
view
0download
0
Универзитет „Св. Климент Охридски“ - Битола
Технички факултет - Битола
- Отсек за сообраќај и транспорт -
ДРАГАН ИЛИЕВСКИ, дипл. сооб. инж.
РАЗВОЈ НА СООБРАЌАЕН МИКРОСКОПСКИ МОДЕЛ ЗА
ГРАД ВИНИЦА
Магистерски труд
Битола, 2014 год.

Универзитет „Св. Климент Охридски“ - Битола
Технички факултет - Битола
- Отсек за сообраќај и транспорт -
РАЗВОЈ НА СООБРАЌАЕН МИКРОСКОПСКИ МОДЕЛ ЗА ГРАД ВИНИЦА
Магистерски труд
Кандидат: Драган Илиевски
Комисија за одбрана:
1. Доц. д-р Даниела Колтовска Нечоска, Универзитет „Св. Климент Охридски“ -
Битола, Технички Факултет Битола, [email protected]
2. Ред. проф. д-р Кристи М. Бомбол, Универзитет „Св. Климент Охридски“- Битола,
Технички Факултет Битола, [email protected]
3. Ред. проф. д-р Виолета Маневска, Универзитет „Св. Климент Охридски“- Битола,
Факултет за информациски и комуникациски технологии, Битола,
Битола, 2014

ИЗЈАВА ЗА АВТОРСТВО НА МАГИСТЕРСКИ ТРУД
Јас, Драган Илиевски, магистрант на Отсекот за сообраќајно – транспортно
инженерство при Технички факултет – Битола, под морална, материјална и кривична
одговорност, изјавувам дека сум автор на магистерскиот труд под наслов „РАЗВОЈ НА
СООБРАЌАЕН МИКРОСКОПСКИ МОДЕЛ ЗА ГРАД ВИНИЦА“. Со својот потпис потврдувам
дека:
- претставениот магистерски труд исклучително е резултат на сопствена
истражувачка работа
- делата од другите автори коишто ги употребив во магистерски труд се цитирани
во согласност со упатствата за цитирање
- списокот на користена литература е наведен во согласност со упатствата за
цитирање на литература
- свесен сум дека плагијаторството – претставување на туѓи дела, било во облик
на цитат, било со парафразирање, или во графички облик со којшто туѓите
мисли односно идеи се претставени како мои сопствени, се казнува според
Закон (чл. 57 алинеја 8 од ЗВО)
- свесен сум за последиците врз мојот статус од докажаното плагијаторство
- електронската форма е идентична со печатената форма на магистерски труд.
Битола, 2014 год. Драган Илиевски

СОДРЖИНА
БЛАГОДАРНОСТИ
АПСТРАКТ I
ABSTRACT II
СПИСОК НА СЛИКИ III
СПИСОК НА ТАБЕЛИ IV
СПИСОК НА ДИЈАГРАМИ IV
СПИСОК НА ПРИЛОЗИ V
1 ВОВЕД 1
1.1 Микроскопски сообраќајни симулациски модели 2
1.2 Анализа на досегашните истражувања 4
1.3 Идентификација на проблемот на истражување 9
1.4 Предмет и цел 9
2 ТЕОРЕТСКИ ОСВРТ КОН VISSIM 10
2.1 Системска архитектура 10
2.2 Основни математички модели 13
2.2.1 МОДЕЛ НА СЛЕДЕЊЕ НА ВОЗИЛАТА 13
2.2.1.1 Модел на Видеман (Wiedemann) 74 14
2.2.1.2 Модел на Видеман (Wiedemann) 99 16
2.2.2 МОДЕЛ НА ОДНЕСУВАЊЕ НА ВОЗАЧИТЕ ПРИ ПРОМЕНА НА ЛЕНТА 18
2.2.3 МОДЕЛ НА СТРАНИЧНО ОДНЕСУВАЊЕ НА ВОЗАЧИТЕ 20
2.2.4 МОДЕЛ НА ОДНЕСУВАЊЕ НА ВОЗАЧИТЕ ПРИ КОНТРОЛА НА СООБРАЌАЈОТ СО
СВЕТЛОСНИ СИГНАЛИ 21
2.3 Калибрација и валидација на симулациски модел 23
2.3.1 ИЗБОР НА ВЛЕЗНИ ПАРАМЕТРИ ЗА КАЛИБРАЦИЈА ВО VISSIM 23

3 МЕТОДОЛОГИЈА НА КАЛИБРАЦИЈА И ВАЛИДАЦИЈА ВО VISSIM 26
3.1 Креирање и развој на симулациски модел 28
3.1.1 ДЕФИНИРАЊЕ НА ОБЕМ И ЦЕЛ НА ИСТРАЖУВАЊЕТО 28
3.1.3 ОДРЕДУВАЊЕ НА МЕРКИ ЗА ЕФИКАСНОСТ 29
3.1.4 ПРИБИРАЊЕ НА ПОДАТОЦИ ОД ТЕРЕН 30
3.1.5 КОДИРАЊЕ НА МРЕЖАТА 31
3.2 Проверка на грешки 35
3.3 Почетна евалуација на моделот со зададени (default) параметри 36
3.4 Почетна калибрација 37
3.4.1 ИДЕНТИФИКАЦИЈА НА ПАРАМЕТРИ ЗА КАЛИБРАЦИЈА 38
3.4.2 ОДРЕДУВАЊЕ НА ПРИФАТЛИВИ ГРАНИЦИ НА ВРЕДНОСТИТЕ НА ПАРАМЕТРИТЕ 39
3.4.3 ПОВЕЌЕКРАТНО СИМУЛИРАЊЕ 40
3.5 Тест на изводливост 42
3.5.1 СПОРЕДБА НА СИМУЛИРАНИТЕ РЕЗУЛТАТИ СО РЕЗУЛТАТИТЕ ОД ТЕРЕН 42
3.6 Валидација на моделот 43
3.6.1 ПРИМЕНА НА СТАТИСТИЧКИ ТЕСТОВИ 44
3.6.1.1 GEH тест 44
3.6.1.2 t–Тест 47
3.6.2 ПРИКАЗ НА ИЗЛЕЗНИТЕ РЕЗУЛТАТИ 48
3.6.3 ВИЗУЕЛНА ПРОВЕРКА НА МОДЕЛОТ 49
4 ИМПЛЕМЕНТАЦИЈА НА МЕТОДОЛОГИЈАТА ЗА ЦЕНТРАЛНОТО ГРАДСКО
ПОДРАЧЈЕ (ЦГП) ВО ГРАД ВИНИЦА 51
4.1 Општи податоци за град Виница 51
4.1.1 НАМЕНА НА ЗЕМЈИШТЕ ВО ГРАД ВИНИЦА 51
4.1.2 СООБРАЌАЈ И СООБРАЌАЈНА ИНФРАСТРУКТУРА 52
4.2 Креирање и развој на микросимулациски модел за град Виница 54
4.2.1 ДЕФИНИРАЊЕ НА ОБЕМ И ЦЕЛ НА ИСТРАЖУВАЊЕ 54
4.2.2 ДЕФИНИРАЊЕ НА ПОДРАЧЈЕ НА ОПФАТ 54
4.2.3 ОДРЕДУВАЊЕ НА МЕРКИ ЗА ЕФИКАСНОСТ 55
4.2.4 ПРИБИРАЊЕ НА ПОДАТОЦИ ОД ТЕРЕН 55
4.2.5 КОДИРАЊЕ НА МРЕЖАТА 60

4.3 Проверка на грешки во моделот 67
4.4 Почетна евалуација на моделот со зададени (default) параметри 67
4.5 Почетна калибрација 68
4.5.1 ИДЕНТИФИКАЦИЈА НА ПАРАМЕТРИ ЗА КАЛИБРАЦИЈА 68
4.5.2 ОДРЕДУВАЊЕ НА ПРИФАТЛИВИ ГРАНИЦИ НА ВРЕДНОСТИТЕ НА ПАРАМЕТРИТЕ 71
4.5.3 ПОВЕЌЕКРАТНО СИМУЛИРАЊЕ 72
4.6 Тест на изводливост 72
4.6.1 СПОРЕДБА НА СИМУЛАЦИСКИТЕ РЕЗУЛТАТИ СО РЕЗУЛТАТИТЕ ОД ТЕРЕН 72
4.7 Валидација на моделот 73
4.7.1 ПРИМЕНА НА СТАТИСТИЧКИ ТЕСТ 73
4.7.2 ПРИКАЗ НА ИЗЛЕЗНИТЕ РЕЗУЛТАТИ 74
4.7.3 ВИЗУЕЛНА ПРОВЕРКА НА МОДЕЛОТ 77
4.8 Дискусија на излезните резултати 78
5 ЗАКЛУЧОЦИ 80
ЛИТЕРАТУРА 82
ПРИЛОЗИ 86

БЛАГОДАРНОСТИ
Изразувам посебна благодарност на мојот ментор, доц. д-р Даниела Колтовска
Нечоска, за целото знаење, стручната помош и поддршка кои ми ги даде за време на
студирањето и при изработката на овој труд, како и за нејзиниот професионален начин
на комуникација и беспрекорно коректен однос.
Благодарам на проф. д-р Кристи Бомбол за советите, сугестиите и
размислувањата кои придонесоа за зголемен квалитет на трудот.
Се заблагодарувам на проф. д-р Виолета Маневска за помошта при примената
на статистиката во истражувањето.
Голема благодарност на Роберт Илиевски, Раде Илиев, Иво Димитров, Кирил
Стојчев, Дејан Анакиев, Орце Илиев, Билјана Илиева, Елизабета Спасова и Ивица
Стоименов за несебичната помош при прибирањето на податоците од терен.
Огромно благодарам на Кристина Хаџипеткова за нејзината помош, поддршка и
мотивација при креирање на микросимулацијата.
Благодарност до вработените во Одделението за катастар при општина Виница
за обезбедувањето на геометриските податоци.
Она што е најважно, најмногу му благодарам на моето семејство, без чија
помош, безрезервна поддршка и љубов ова немаше да се оствари.
И, на крајот, им се заблагодарувам на моите роднини, пријатели, колеги и сите
останати кои директно или индиректно учествуваа во изработката на мојот
магистерски труд.
Посветено на семејството

i
АПСТРАКТ
Моделите за микросимулација на сообраќајот содржат стандардни вредности за
секој параметар, кои не можат секогаш веродостојно да ги отсликаат локалните
сообраќајни услови. Ова најчесто претставува ограничување за симулациските модели
точно да ги ,,имитираат“ условите од терен врз основа на што ќе се донесуваат
соодветни одлуки. Зaтоа, при развојот на микроскопски модел, посебна и значајна
фаза е калибрацијата и валидацијата со цел да се постигне негова веродостојност.
Во Р. Македонија досега не е развиена процедура за калибрација и валидација
на микроскопски симулациски модел без разлика на величината на мрежата. Оттука,
во ова истражување за прв пат е развиена методологија за калибрација и валидација
на микроскопски симулациски модел во VISSIM за мал град. Применета е студија на
случај на мрежа од осум крстосници во централното градско подрачје (ЦГП) на град
Виница.
Резултатите од симулацискиот моделот за избраниот параметар – време на
патување се споредени со емпириските истражувања за случај на некалибриран и
калибриран модел. Rазликите меѓу емпириските мерења и излезните резултати од
калибрираниот модел изнесуваат 1% за патнички автомобили, 1,8% за товарни возила
и 4% за автобуси.
За тестирање на значајноста на разликите на средните вредности на времето за
патување применет е t - тестот. Се заклучи, со ризик од 5%, дека разликите меѓу
моделот и емпириските мерења не се значајни и дека моделот реално ја отсликува
ситуацијата од терен.
Со ова истражување се поставија основите за калибрација и валидација на
микроскопски симулациските модели за мали градови во Р. Македонија. Се отворија
нови насоки за продолжување на истражувањата и тоа за: градови со поголем број на
жители, комплексна сообраќајна мрежа, интензивни сообраќајни оптоварувања.
Клучни зборови: микроскопски симулациски модел, калибрација и валидација,
градска улична мрежа, време на патување

ii
ABSTRACT
Traffic micro simulation models contain default values for each parameter, which
can not always authenticaly reflect the local traffic conditions. This is usually a limit to the
simulation models, to accurately emulate the conditions from the field, upon what
appropriate decisions will be made later. Therefore, in developing a microscopic model,
special and important phase is the calibration and validation in order to be achieved their
accuracy.
In the Republic of Macedonia, a procedure for calibration and validation of a
microscopic simulation model, regardless of the size of the network has not been yet
developed. Hence, this research represents the first step to develop a methodology for
calibration and validation of a microscopic simulation model in VISSIM for small city
network. A case study was carried out on a network of eight intersections in the downtown
area (DtA) of the city of Vinica.
The results of the simulation model for the selected parameter travel time are
compared with empirical researches on the case of non-calibrated and calibrated model.
Differences between the empirical measurements and the outcomes of the calibrated
model was 1% for passenger cars, 1.8% for trucks, and 4% for buses.
For testing the significance of mean differences in the travelling time, the t-test was
applied. It was concluded, with a risk of 5%, that the differences between the model and the
empirical measurements are not significant and that the model reflects the real situation on
the field.
Hereby, the research has laid the basis for calibration and validation of microscopic
simulation models for small cities in the Republic of Macedonia. New guidelines have been
set for continuing the research for cities with a larger population, for complex traffic
network, and increasing traffic demand.
Keywords: microscopic simulation model, calibration and validation, urban traffic
network, travel time

iii
СПИСОК НА СЛИКИ
Сл. 2.1: Параметри на следење на возилата - модел на Wiedemann 74 15
Сл. 2.2: Параметри на следење на возилата за моделот на Wiedemann 99 16
Сл. 2.3: Параметри на однесување на возачите при промена на лента 18
Сл. 2.4: Параметри за странично однесување на возачите 20
Сл. 2.5: Параметри за однесување на возачите при контрола на сообраќајот со СС 21
Сл. 3.1: Изглед на менито за избор на излезни резултати од VISSIM 39
Сл. 3.2: Концепт на прифатлива област 43
Сл. 3.3: Пример за приказ на податоци со линиски дијаграм 49
Сл. 3.4: Пример за неприфатлив симулациски модел 49
Сл. 4.1: Местоположба на Виница во РМ 51
Сл. 4.2: Сообраќајна мрежа на град Виница 53
Сл. 4.3: Подрачје на опфат 55
Сл. 4.4: Снимање на сообраќајот со камера 56
Сл. 4.5: Геометрија на истражуваниот потег 57
Сл. 4.6: Сообраќајни токови на истражуваниот потег 59
Сл. 4.7: Подлога користена во VISSIM 60
Сл. 4.8: Поставеност на јазлите за прибирање на податоци 64
Сл. 4.9: Локации за прибирање на податоци за време на патување 64
Сл. 4.10: Поставување на % учество на возила и посакувана брзина 65
Сл. 4.11: Креирање на маршрути на движење и учество на возилата 65
Сл. 4.12: Изглед на проектирана крстосница во VISSIM 66
Сл. 4.13: Посакувана брзина на возилата за некалибриран модел 66
Сл. 4.14: Посакувана брзината на возилата за калибриран модел 70
Сл. 4.15: Калибрирани вредности за брзина на возилата 71
Сл. 4.16: Повеќекратно симулирање во VISSIM 72
Сл. 4.17: Визуелна проверка на моделот 77

iv
СПИСОК НА ТАБЕЛИ
Таб. 2.1: Листа на параметри за калибрација во VISSIM 24
Таб. 3.1: Мерки за ефикасност според тип на сообраќаен објект 30
Таб. 3.2: Типови на излезни фајлови од VISSIM 38
Таб. 3.3: Минимален број на повторувања според посакуваното ниво на значајност 41
Таб. 3.4: Критериуми и мерки за валидација 46
Таб. 4.1: Биланс на изградени површини 52
Таб. 4.2: Регистрирани патни моторни и приклучни превозни средства во Виница –
2012 год. 54
Таб. 4.3: Вредности на ПАЕ за различни типови возила 58
Таб. 4.4: Гранични вредности на време и брзина на патување измерени од терен 60
Таб. 4.5: Геометриски карактеристики 61
Таб. 4.6: Тип на сигнализација 62
Таб. 4.7: Време на патување на делница 68
Таб. 4.8: Листа на влезни параметри за калибрација на моделот на VISSIM 69
Таб. 4.9: t–тест за време на патување на делница (фаза на почетна калибрација) 70
Таб. 4.10: Време на патување на делница во VISSIM 73
Таб. 4.11: t–тест за време на патување на делница 74
СПИСОК НА ДИЈАГРАМИ
Диј. 1.1: Области на примена и добивки од микроскопските сообраќајни симулациски
модели 3
Диј. 2.1: Приказ на компонентите на VISSIM 12
Диј. 3.1: Методологија на калибрација и валидација 27
Диј. 4.1: Процентуална застапеност на видовите возила 58
Диј. 4.2: Компарација на времето на патување 75
Диј. 4.3: Компарација на вкупно просечно време на патување 75
Диј. 4.4: Компарација на брзина на патување 76
Диј. 4.5: Компарација на вкупна просечна брзина на патување 76

v
СПИСОК НА ПРИЛОЗИ
Прилог 1: Образец за прибирање податоци за токови на возила 87
Прилог 2: Сообраќајни слики 88
Прилог 3: Време и брзина на патување на делница – емпириски мерења 92
Прилог 4: Време и брзина на патување на делница по возила – емпириски мерења 92
Прилог 5: Време на патување од некалибриран модел 98
Прилог 6: Време на патување од калибриран модел 99
Прилог 7: Изглед на проектирани крстосници во VISSIM 100
Прилог 8: 3D изглед на микросимулациски модел 105

1
1 ВОВЕД
Развојот на информатичката и компјутерската технологија наоѓа примена и
станува неизоставен дел на сообраќајното инженерство. Современото сообраќајно
инженерство не може да се замисли без употреба на современи софтверски алатки со
кои се олеснува и се верифицира работата на сообраќајните инженери.
Микроскопските сообраќајни симулациски модели се применуваат нашироко и
со огромна брзина. Служат за оцена на проектираниот транспортен систем и
сообраќајните операции, пред сè бидејќи симулацијата е брза, не е скапа, не носи
ризик, овозможува привлечни анимации, стохастичка варијабилност за пресликување
на реалните сообраќајни услови, и способност да се моделираат комплексни патни
геометрии.
Треба да се истакне дека од суштинско значење е веродостојноста на
симулацискиот модел. Прашањата што може да се појават се од типот: дали моделите
точно го пресликуваат реалното однесување на возачите, и дали симулацијата е
веродостојна од неа да може да се преземат натамошни инженерски чекори (предлог-
сообраќајни решенија).
Микроскопските симулациски модели содржат независни параметри кои се
користат за опишување на карактеристиките на сообраќајниот ток, однесувањето на
возачите и видот на контрола на сообраќајот. Моделите содржат стандардни
вредности за секој параметар, но исто така им овозможуваат на корисниците да ги
променат вредностите за да ги претстават локалните сообраќајни услови.
Процесот на прилагодување и детално нагодување на параметрите на моделот
со употреба на веродостојни податоци кои ги рефлектираат локалните сообраќајни
услови се вика калибрација на моделот. Соoдветната калибрација е неопходен чекор
во симулациските апликации. За да се постигне веродостојност на симулациските
модели, многу е важно да се примени ригорозна процедура на калибрација пред да се
направат натамошни студии и анализи.
Во ова истражување се развива сообраќаен микроскопски модел за град
Виница, при што посебен акцент е ставен на методологијата на калибрација и
валидација на моделот во VISSIM.

2
Структурно, истражувањето се состои од пет (5) глави. Во Воведот содржани се
општите разгледувања за микросимулациските модели, анализата на досегашните
истражувања, идентификуван е проблемот, предметот и целта на истражувањето. Во
Глава 2 се прикажани теоретските основи на симулаторот VISSIM. Посебен акцент е
ставен на неговата системска инфраструктура и математичките модели. Во Глава 3
развиена е методологија на калибрација и валидација на микроскопскиот модел.
Дефинирани се потребните чекори и потребните податоци.
Во Глава 4 прикажан е процесот на развој и проектирање на моделот во VISSIM
за централното градско подрачје (ЦГП) во Виница, процесот на прибирање на
податоци, имплементацијатa на развиената методологија на калибрација и
валидација, итн. Веродостојноста на излезните резултати од развиениот модел и
мерењата од терен се потврдува со примена на статистичките тестови GEH и t - тестот.
Заклучните согледувања и препораките на натамошни истражувања се
прикажани во Глава 5.
1.1 Микроскопски сообраќајни симулациски модели
Почетоците на примена на симулациските модели во сообраќајот датираат од
1955 година (Герлоу) (Gerlough, 1955).1 На почетокот тие се развивале според потреба
за различни видови на тестирања за индивидуални сообраќајни решенија. Подоцна,
нивниот развој е проследен со континуираниот развој на десктоп компјутерите и
зголемената примена на информатичките технологии во сообраќајните системи што
доведе до појава на интелигентните транспортни системи (ИТС), адаптивните системи
за контрола на сообраќајот, системите за водење и насочување на сообраќајот итн.
Со развојот на микропроцесорите, денешните модели се способни за обработка
на мрежа од 100 км, со над 200 крстосници и десетици илјади возила во реално
време.2 Заради економската исплатливост, зголемена безбедност и временската
ефективност микроскопските сообраќајни модели се применуваат во различни
области во сообраќајното инженерство (Диј. 1.1).
1 http://publish.uwo.ca/~jmalczew/gida_5/Pursula/Pursula.html 2Ibid.

3
Диј. 1.1: Области на примена и добивки од микроскопските сообраќајни симулациски
модели
Извор: Byungkyu., B., Jongsun, W., Microscopic Simulation Model Calibration and Validation Handbook, Transport Operations Laboratory Centre for Transportation Studies, University of Virginia, 2006, pp. 1
Бројни се микроскопските симулациски модели кои денес успешно се
применуваат, меѓу кои, како најпопуларни би ги издвоиле: CORSIM, VISSIM, PARAMICS,
итн. Иако постојат разлики меѓу нив, заедничка карактеристика за сите е постоењето
на подмоделите на следење на возилата, промена на лента, прифатлив временски
интервал за промена на лента или вклучување во сообраќајниот ток на
крстосница, како и моделите на различни карактеристики на возила и различни
типови на однесување на возачите.
Влезните податоци најчесто вклучуваат:
1. Дистрибуција на сообраќајот: може да се постави или со дистрибуција на
сообраќајот на крстосниците или со помош на изворно - целни матрици
2. Геометриски карактеристики на патната инфраструктура
3. Мерки за контрола на сообраќајот и правила за приоритет на токовите
4. Програма за работа на светлосните сигнали (СС), итн.

4
Што се однесува до излезните податоци, најчести се податоците за просечно
време на патување, просечните временски доцнења, просечната брзина,
максималната просечна должина на редот, итн.
Сепак треба да се истакне дека успешната примена на овие алатки се заснова
пред сѐ на разбирање на основните теоретски принципи за моделирање на
сообраќајните токови. Сознанијата за можностите и ограничувањата на алатките,
обемот и типот на потребните влезни податоци, способностите за визуелизација и
типовите на сообраќајни мрежи за кои се наменети, придонесува за правилен избор
на микросимулациските алатки. Исто така, знаењето на основните теоретски принципи
за моделот и подмоделите им помагаат на аналитичарите и сообраќајните експерти да
ги изберат вистинските параметри за калибрација и прилагодување на моделот според
локалните услови.
1.2 Анализа на досегашните истражувања
Во продолжение се прикажани некои од позначајните истражувања за
калибрација и валидација на сообраќајни симулациски модели и за моделот во
VISSIM.
Хоурдакис и др. (Hourdakis et al.)3 применија практичен пристап за калибрација
и валидација на сообраќајни симулациски модели. Тие претставија статистички
процедури за валидација на симулациските модели, како и 3-етапен пристап за
калибрација на симулациски модели. Трите етапи се:
1) калибрација што се базира на протокот на возила
2) калибрација што се базира на брзината, и
3) калибрација што се базира на целите.
Нивните истражувања не се насочени кон одредени промени на параметрите и
деталите за потребните податоци. Овие истражувања се засновани со употреба на
симулаторот Парамикс (Paramics).
3Hourdakis J., Michalopoulos P., and Kottommannil J., A PRACTICAL PROCEDURE FOR CALIBRATION MICROSCOPIC TRAFFIC SIMULATION MODELS, 82nd Annual Meeting CD-ROM, Transportation Research Board, Washington D.C., 2003.

5
Чу и др. (Chu et al.)4 предложија пристап на калибрација кој може да се
употребува за сите модели за сообраќајна симулација. Тие применија четиристепен
пристап кој се однесува на модификации во:
1) однесувањето на возачите
2) изборот на маршрута
3) процената на изворот и целта на патувањата, и
4) детално нагодување на моделот за калибрација на моделите за сообраќајна
симулација.
Главниот фокус на истражувањето е на техниките за процена на изворот и целта
на патувањата за големи мрежи. Тие не се насочиле кон процесите на калибрација што
се специфични за VISSIM.
Сојузната администрација за патишта (The Federal Highway Administration)5 има
презентирано генерален водич за креирање на моделот, проектно планирање на
сообраќајната симулација, калибрација и валидација на моделот, и анализа на
резултатите. Водичот не е специфичен и му недостасуваат спецификации за тоа кој
параметар треба да се менува во зависност од типот на мрежа која се моделира.
Одделни студии од Ким и др. (Kim et al.)6 и Жизоу и др. (Zhizou et al)7
прикажуваат теоретски пристапи со употреба на генетски алгоритми и симплекс
методи за калибрација на микросимулациски модели. Ниту една студија не дава
формална сеопфатна процедура за промена на калибрираните параметри со употреба
на VISSIM.
Парк и др. (Park et al.)8 претставиле формален однос меѓу повеќе софтверски
пакети за сообраќајна симулација. Исто така, тие претставиле процедури за
калибрација со користење на генетски алгоритми.
4Chu L., Liu H., Oh J., and Recker W., A CALIBRATION PROCEDURE FOR MICROSCOPIC TRAFFIC SIMULATION, 83rd Annual Meeting CD-ROM, Transportation Research Board, Washington, D.C., 2004. 5Federal Highway Administration, Analysis Toolbox Volume III. GUIDELINES FOR MICROSIMULATION MODELING. FHWA Publication Number FHWA-HRT-04-040, 2004. 6Kim K. and Rilet L., SIMPLEX BASED CALIBRATION OF TRAFFIC MICROSIMULATION MODELS USING ITS DATA, 82nd Annual Meeting CD-ROM, Transportation Research Board, Washington, D.C., 2003 7Zhizhou W., Juan S., and Xiaoguang Y., CALIBRATION OF VISSIM FOR SHANGHAI EXPRESSWAY USING GENETIC ALGORITHM, Proceedings of the 2005 Winter Simulation Conference, pgs. 2645-2648, 2005 8Park B. and Schneeberger J., MICROSCOPIC MODEL CALIBRATION AND VALIDATION: A CASE STUDY OF VISSIM FOR A COORDINATED-ACTUATED SYSTEM, 81st Annual Meeting CD-ROM, Transportation Research Board, Washington, D.C., 2002

6
Сакс и др. (Sacks et al.)9 развиле статистичка рамка за валидација на моделите за
сообраќајна симулација. Тие опишале генерален водич кој се однесува на потребните
податоци и процедурите на валидација со употреба на статистички техники за
симулаторот Корсим (Corsim).
VISSIM како релативно нов мултимодален софтвер е особено популарен во
сообраќајно – транспортното инженерство. Тоа е причина за голем број на
истражувачи да навлезат во процесите на калибрација и валидација. Во продолжение
се прикажани позначајните истражувања.
Парк и др. (Park et al.)10 предложиле процедура за калибрација и валидација во
девет чекори за координиран поттикнат сигнален систем во VISSIM. Деветте чекори
вклучуваат:
1) одредување на мерките за ефикасност (MOE11)
2) прибирање на податоци
3) идентификација на калибрираните параметри
4) почетно градење на моделот
5) стартување на прелиминарни симулации
6) доразвивање на почетниот изграден модел (корекција на евентуални грешки
во проектирањето)
7) нагодување на параметрите
8) евалуација на подесувањето на параметрите
9) прибирање на нови податоци за валидација.
Истражувањето главно се фокусира на операции на артеријална мрежа.
Сакс и др. (Sacks et al.)12 во своето истражување претставиле и препознале
четири клучни грешки при валидација на моделот:
1. одредување на значењето на валидацијата во различни ситуации
2. добивање на релевантни податоци
9Sacks J., Rouphail N., Park, B, and Thakuriah P., STATISTICALLY-BASED VALIDATION OF COMPUTER SIMULATION MODELS IN TRAFFIC OPERATIONS AND MANAGEMENT, Journal of Transportation Statistics, Volume 5, No. 1, pp 1-24, 2002 10Park B. and Qi H., DEVELOPMENT AND EVALUATION OF A CALIBRATION AND VALIDATION PROCEDURE FOR MICROSIMULATION, Virginia Transportation Research Council. Report VTRC 05-CR1, August, 2004 11MOE – Measure of effectiveness 12 Sacks, J., N. Rouphail, B. Park, and P. Thakuriah, STATISTICALLY BASED VALIDATION OF COMPUTER SIMULATION MODELS IN TRAFFIC OPERATIONS AND MAN- PARK AND QI 217 AGEMENT. Journal of Transportation and Statistics, Vol. 5, No. 1, 2002

7
3. одредување на степенот на доверливост
4. предвидување на ефикасноста на мерките според нови услови.
Хелинга (Hellinga)13 предложил генерални услови за калибрација на моделот.
Предложениот процес на калибрација е составен од три чекори:
1. дефинирање на истражувањето
2. почетна калибрација, и
3. евалуација на излезните резултати од моделот.
Меѓу студиите за калибрација во VISSIM, Фелендорф и Фортиш (Fellendorf and
Vortisch)14 отвориле дискусија за логиката на следење на возила и однесувањето на
возачите кои се вградени во VISSIM. Ова истражување се однесува на детална анализа
на моделот на однесување на возачите – моделот на Видеман (Wiedemann).
Водич за калибрација и валидација е предложен и од Милам и др. (Milam et
al.)15. Водичот вклучува: прибирање на податоци од терен, калибрација на моделите,
валидација на моделите при одредени критериуми, (како на пр. 95-99 % совпаѓање со
набљудуваните протоци од терен) и проценка на минималниот број на симулации за
посакуваното ниво на значајност.
Менени и др. (Menenni at. al.)16 користелe генетски алгоритам за калибрација во
VISSIM заснован на податоци за брзина и проток.
Парк и Ки (Park and Qi)17 предложиле генерална методологија за калибрација на
микросимулациски модели за изолирани крстосници со употреба на VISSIM. Во ова
истражување е користен методот на Латинска супер коцка (Latin Hyper Cube) за
создавање на сценарија, а крајното множество на параметри е добиено со употреба на
13 Hellinga, B. R., REQUIREMENT FOR THE CALIBRATION OF TRAFFIC SIMULATION MODEL, Department of Civil Engineering, University of Waterloo, Ontario, Canada, 1998 14 Fellendorf, M. And Vortisch P. VALIDATION OF THE MICROSCOPIC TRAFFIC FLOW MODEL VISSIM IN DIFFERENT REAL-380 WORLD SITUATIONS. In 80th Annual Meeting Preprint CD-ROM, Transportation Research Board of the National 381 Academies, Washington, D.C., 2001 15 Milam, R. T., and F. Choa. RECOMMENDED GUIDELINES FOR THE CALIBRATIONAND VALIDATION OF TRAFFIC SIMULATION374 Models. Fehr & Peers AssociatesInc., Roseville, California, 2000 16 Menneni, S., Sun, C., Vortisch, P. MICROSIMULATION CALIBRATION USING SPEED FLOW RELATIONSHIPS. In 87th Annual Meeting Preprint CD-ROM, Transportation Research Board of the National Academies, Washington, D.C., 2008 17 Park, B. and Qi, H. DEVELOPMENT AND EVALUATION OF A PROCEDURE FOR THE CALIBRATION OF SIMULATION MODELS. In Transportation Research Record: Journal of theTransportation Research Board, No. 1934, Transportation Research Board of the NationalAcademies, Washington, D.C., 2005, pp. 208–217

8
генетски алгоритам. Истата методологија е тестирана на голема мрежа и координиран
систем од страна на Парк и др. (Park et al.)18.
Метју и Радхакришнан (Mathew and Radhakrishnan)19 направиле студија за
калибрација на моделот во VISSIM со осврт кон хетерогениот сообраќај. Направиле
анализа на сензитивноста за да ги изберат параметрите за калибрација и да ги одредат
нивните граници. Вовеле и формулација за оптимизација за одредување на множество
на параметри со кои ќе се минимизираат доцнењата на крстосниците. И двата модели
на Видеман (Wiedemann) - 74 и 99 се калибрирани на три крстосници.
Ловнес и Махемел (Lownes and Machemehl)20 го разгледувале капацитетот на
линкот како мерка за ефикасност и спровеле експерименти со шест различни
комбинации на параметрите за следење на возилата на моделот на Видеман
(Wiedemann) 99. Направена е двонасочна анализа на варијансата (дисперзијата) за да
се одредат индивидуалните параметри кои значително влијаат врз вредноста на
капацитетот, како и интеракцијата меѓу самите параметри.
Заради едноставноста, повеќето од првите студии за калибрација користеле
само една мерка за ефикасност. Од неодамна, се усвоени и повеќекритериумски
пристапи (Дуонг и др.(Duong et al.))21.
Сепак, генералниот заклучок е дека униформна методологија за спроведување
на калибрацијата сè уште не постои.
Досега, во Р. Македонија за овој софтвер не е развиена методологија на
калибрација и валидација на проектираниот сообраќаен микроскопски модел. Затоа и
акцентот во ова истражување е ставен токму на оваа проблематика.
18 Park, B., Jongsun, W., and Ilsoo, Y. APPLICATION OF MICROSCOPIC SIMULATION MODEL CALIBRATION AND VALIDATION PROCEDURE: A CASE STUDY OF COORDINATED ACTUATED SIGNAL SYSTEM. In Transportation Research Record: Journal of theTransportation Research Board, No. 1978, Transportation Research Board of the NationalAcademies, Washington, D.C., 2006, pp. 113–122 19 Mathew, T.V. and Radhakrishnan, P. CALIBRATION OF MICROSIMULATION MODELS FOR NONLANE-BASED HETEROGENEOUS TRAFFIC AT SIGNALIZED INTERSECTIONS. Journal of Urban Planning and Development, ASCE, Vol. 136, No.1, 2010, pp. 59-66 20Lownes, N. E., & Machemehl, R. B. VISSIM: A MULTI-PARAMATER SENSITIVITY ANALYSIS. Proceedings of the 38th Winter Simulation Conference, 2006, pp. 1406-1413 21Duong, D., Saccomanno, F., and Hellinga, B. CALIBRATION OF TRAFFIC MODEL FOR SIMULATING SAFETY PERFORMANCE, In 89th Annual Meeting Preprint CD-ROM, Transportation Research Board of the National Academies, Washington, 404 D.C., 2010. pp. 405

9
1.3 Идентификација на проблемот на истражување
Во стручната литература недостига точно и прецизно дефинирање на
методологијата за валидација и калибрација на микроскопските сообраќајни
симулациски модели. Присутни се неформални практични искуства при што ретко се
дава опис на целокупната постапка.
При развојот на моделот, како влезни параметри, најчесто се користат
зададените (default) параметри, без да се врши нивно нагодување во поглед на
соодветноста за примена во локална градска сообраќајна мрежа и за нејзините
корисници. Ова најчесто претставува ограничување за симулациските модели точно да
ги ,,имитираат“ условите од терен врз основа на што ќе се донесуваат соодветни
одлуки. Идентификуваните проблеми се наметнуваат како актуелни за истражувањето.
1.4 Предмет и цел
Предмет на трудот е анализа и оценка на функционирањето на крстосниците во
централното градско подрачје (ЦГП) на Виница со примена на VISSIM.
Цел на трудот е да предложи и оцени генерална методологија за калибрација и
валидација на сообраќаен микроскопски симулациски модел. Валидноста на
предложената методологија е изведена на студија на случај на мрежа од осум
крстосници во ЦГП на град Виница со примена на VISSIM.

10
2 ТЕОРЕТСКИ ОСВРТ КОН VISSIM
PTV VISSIM е микроскопски мултимодален софтвер за симулација на
сообраќајот во градови и на автопатишта развиен од ,,PTV Planung Transport Verkehr
AG“ во Карлсруе, Германија. Името е акроним од германските зборови
„VerkehrInStädten – SIMulationsmodell“, што значи ,,сообраќај во градови –
симулациски модел“. Овој софтвер денес е глобален лидер на пазарот со над 7000
продадени лиценци во последните 15 години. Околу една третина од корисниците се
консултантски фирми и индустрија, една третина јавни агенции, додека преостанатата
третина се академски институции за едукација и истражувања.22
Микроскопското симулирање кое го овозможува VISSIM значи дека секоја
единица (автомобил, воз, автобус, пешак) е симулирана индивидуално, т.е.
претставена со соодветна единица во симулацијата, со сите негови својства, како и
меѓусебните дејствија со останатите единици.
Мултимодалноста на VISSIM овозможува моделирање на различни видови
учесници во сообраќајот: возила (автомобили, автобуси и товарни возила), шински
сообраќај, велосипеди, моторцикли и пешачки токови.
VISSIM се применува во сообраќајно - транспортното инженерство,
транспортното планирање, управувањето и контролата на сообраќајот, јавниот превоз,
урбаното планирање и проектирање, заштитата од пожар (симулација на евакуација),
3Д визуелизација (компјутерска анимација), за илустративни цели и комуникација со
јавноста, итн.
Составен е од четири структурни компоненти кои функционираат како целина.
Компонентите се претставени и образложени во натамошниот текст.
2.1 Системска архитектура
Основниот сообраќаен модел во VISSIM е развиен од Раинер Видеман (Rainer
Wiedemann) на Универзитетот Карлсруе (Karlsruhe) во 1974 год. Toa e модел на
следење на возилата кој ги зема предвид физичките и психолошките аспекти на
22Martin Fellendorf and Peter Vortisch, Microscopic Traffic Flow Simulator VISSIM, Fundamentals of Traffic Simulation Vol. 145, 2010

11
возачите. Моделот кој се однесува на пешаците е развиен од Дирк Хелбинг и др. (Dirk
Helbing et al.) во 1995 год.23
Во секој сообраќаен симулатор, така и во VISSIM, потребен е математички
модел кој ја претставува транспортната понуда на системот симулирајќи ги нејзините
технички и организациски аспекти. Потоа, потребен е модел на побарувачка којшто ќе
генерира побарувачка на возила, лица кои патуваат по транспортната мрежа. За
разлика од макроскопските транспортни модели, контролата на сообраќајот треба да
биде моделирана со висока деталност во зависност од понудата и побарувачката.
Затоа, симулаторот, гледано од аспект на системска архитектура, е изграден од три
компоненти + една дополнителна компонента којашто ги генерира излезните
резултати за секоја симулација. Во натамошниот текст подетално ќе бидат објаснети
наведените компоненти.
Првата компонента ја сочинуваат патната и шинската инфраструктура,
вклучувајќи ја поставената сигнализација (хоризонтална и вертикална) и паркинг
просторите. Оваа компонента е потребна за моделирање на патиштата и колосеците.
Стојалиштата на јавен превоз и паркинг просторите се потребни за дефинирање на
изворните и целните точки на патувањата. Во инфраструктурната компонента се
вбројуваат и фиксните елементи како сообраќајни знаци и детекторите кои се
поставени на патната и шинската инфраструктура.
Втората компонента ја сочинуваат техничките карактеристики на возилата и
карактеристиките на сообраќајниот ток. Сообраќајот е дефиниран со изворно – целни
матрици или со генерирање на токови на влезните линкови. Моделот на
доделување/припишување на токовите и маршрутите на движење се исто така
составен дел на втората компонента, како и линиите на јавен превоз кои се
дефинирани како низа од линкови и стојалишта.
Третата компонента ги содржи сите потребни елементи за контрола на
сообраќајот (дефинирањето на приодите/пристапите контролирани со знакот СТОП,
приоритетни/неприоритетни токови и контролата на сообраќајот со светлосни
сигнали). Иако сигналните глави припаѓаат на компонентата инфраструктура,
23https://en.wikipedia.org/wiki/PTV_VISSIM

12
сигнализацијата сама по себе содржи параметри за поставување на сигналите и за
поттикната контрола, кои се дел од оваа трета компонента.
Состојбата со четвртата компонента е нешто поразлична. Оваа компонента е
„задолжена“ за сите излезни податоци од VISSIM. Евалуациската компонента ги
обработува податоците од првите три компоненти без повратна врска. Излезните
резултати може да бидат генерирани за време на симулацијата, и тоа во два случаи:
1. кога е активна анимацијата на возилата и сигналните состојби, или
2. како статистички податоци претставени во табели (на пример повиците од
детекторите и состојбите на возилата).
Повеќето мерки за ефикасност се генерирани за време на симулацијата и се
зачувуваат на крајот на истата.
На Диј.2.1 прикажани се компонентите и нивната меѓусебна поврзаност.
Диј. 2.1: Приказ на компонентите на VISSIM
Извор: Martin Fellendorf and Peter Vortisch, Microscopic Traffic Flow Simulator VISSIM, Fundamentals of
Traffic Simulation Vol. 145, 2010, pp. 67

13
Со подетално проучување на архитектурата на VISSIM се осознава дека сите
овие компоненти се засновани на математички модели и формулации кои ја
претставуваат неговата срж.
2.2 Основни математички модели
2.2.1 МОДЕЛ НА СЛЕДЕЊЕ НА ВОЗИЛАТА
Основната идеја на моделот е претпоставката дека возачот може да биде во
еден од четирите начини на возење:
- Слободно возење: нема интеракција со останатите набљудувани возила.
Возачот се обидува да достигне и задржи одредена брзина, т.е. посакувана
брзина. Во реалноста, брзината на слободно возење не може да се одржува
константна, заради осцилациите околу посакуваната брзина кои се јавуваат
заради несовршената контрола на педалот за гас.
- Приближување: процес на прилагодување на брзината на возачот според
пониската брзина на возилото коешто го следи. Додека се приближува, возачот
забавува, сè додека разликата во брзината на двете возила е нула (0) во
моментот кога ќе го достигне посакуваното безбедносно растојание.
- Следење: возачот го следи возилото пред него без забрзување или забавување.
Го одржува безбедносното растојание константно, но сепак заради
несовршената контрола на педалот за гас и несовршената проценка, разликите
во брзината осцилираат околу нула.
- Забавување: примена на средна или висока стапка на забавување доколку
растојанието се намали под посакуваното безбедносно растојание. Ова може
да се случи доколку следеното возило ненадејно ја промени брзината, или
трето возило се приклучи во лентата пред набљудуваното возило.
Заради комбинацијата од психолошки аспекти и физички ограничувања на
перцепцијата на возачот, моделот е наречен психофизички модел на следење на
возилата. Моделот на сообраќаен ток во VISSIM се заснова на моделите на следење
на возилата: Видеман (Wiedemann) 74 и Видеман (Wiedemann) 99.

14
Моделот Видеман (Wiedemann) 74 е соодветен за градски средини, додека
моделот 99 е соодветен за употреба за сообраќај на автопатишта и неурбани
подрачја.24
Постојат три параметри кои го дефинираат растојанието коешто возачот го
гледа напред и назад, т.е. растојанието до другите возила и средствата за сообраќајна
контрола на кои треба да реагира.
Првиот параметар – максималното растојание на прегледност го одредува
најголемото растојание кое возачот може да го види пред него.
Вториот параметар – бројот на набљудувани возила, дефинира колку возила
возачот може максимално да набљудува пред него и да реагира соодветно на нивните
движења. Бројот на набљудувани возила треба да биде нагоден на најмалку две (2),
инаку возачот нема да има доволна прегледност за навремена реакција, како на
сообраќајните сигнали така и на останатите возила.
Третиот параметар – минималното растојание на прегледност се користи само
доколку постојат возила (на пр. велосипеди) кои стојат во колоната еден до друг.
Доколку не постои странично однесување, овој параметар се нагодува на нула (0).
Доколку неколку возила можат да стојат едно до друго, тогаш оваа вредност треба да
се зголеми. Во урбани подрачја оваа вредност може да биде 20-30 метри.
2.2.1.1 Модел на Видеман (Wiedemann) 74
Графичкиот интерјфес со параметрите кои се однесуваат на моделот на
Видеман (Wiedemann) 74 е прикажан на Сл. 2.1.
24PTV AG, VISSIM User Manual, Karlsruhe Germany, April 2011, pp. 131

15
Сл. 2.1: Параметри на следење на возилата - модел на Wiedemann 74
Извор: PTV VISSIM 6.0
Параметрите кои се разгледуваат во овој модел се: просечното растојание при
мирување на возилата ( ax ), дополнителното безбедносно растојание ( addbx ), и
повеќекратното безбедносно растојание ( multbx ).
Просечното растојание меѓу возилата кога тие не се движат го дефинира
просечното посакувано растојание меѓу две застанати возила, со стандардна вредност
2 метри.
Дополнителното и повеќекратното безбедносно растојание го претставува
посакуваното безбедносно растојание меѓу две возила во движење. Се пресметува со:
vzbxbxaxbxaxd multadd )( 25 (2.1)
Каде што:
- ax е просечното растојание при мирување на возилата
- addbx е дополнителното безбедносно растојание
- multbx е повеќекратното безбедносно растојание
- )15.0,5.0(Nz е меѓу [0,1]
25 David Michael Miller, D., DEVELOPING A PROCEDURE TO IDENTIFY PARAMETERS FOR CALIBRATION OF A VISSIM MODEL, Georgia, May 2009, pp. 7

16
- v е брзината на возилото
Изразот се користи за пресметка на посакуваното безбедносно растојание меѓу
возилата во секој момент на симулацијата и за промена на забрзувањето,
забавувањето, и престигнувањето на возилата.
2.2.1.2 Модел на Видеман (Wiedemann) 99
Графичкиот интерфејс со параметрите што се однесуваат на моделот на
Видеман (Wiedemann) 99 се прикажани на Сл. 2.2.
Сл. 2.2: Параметри на следење на возилата за моделот на Wiedemann 99
Извор: PTV VISSIM 6.0
Значајно е да се спомене дека параметрите кои се однесуваат на моделите на
страничното однесување, однесувањето при промена на лента и однесувањето при
контрола на сообраќајот со светлосна сигнализација се идентични и за двата модели
(моделот 99 и моделот 74). Но, во моделот на Видеман 99, додатно се содржани и
следните параметри:
- CC0 (растојание кога возилата не се движат) го дефинира посакуваното
растојание меѓу застанати возила. Овој параметар нема варијации.

17
- CC1 (Интервал на следење) е времето (во секунди) кое возачот сака да го
одржува во однос на возилото пред него. Колку е поголема вредноста, толку
возачот е повнимателен. Оттука, при зададена брзина [m/s], безбедносното
растојание dx_safe се пресметува според:
VCCCCsafedx 10_ 26 (2.2)
Безбедносното растојание е дефинирано како минимално растојание кое
возачот ќе го одржува додека следи друго возило. Во случај на интензивни
протоци, ова растојание станува вредност со најголемо влијание врз
капацитетот.
- CC2 (варијација во следењето) ги ограничува надолжните осцилации, односно
колку возачот дозволува поголемо растојание од безбедносното растојание
пред намерно да се приближи на возилото пред него. Ако оваа вредност е 10 м,
процесот на следење резултира со растојанија меѓу dx_safe и dx_safe+10м.
Стандардната вредност изнесува 4 м. и се однесува за прилично стабилен
процес на следење.
- CC3 (праг за „навлегување“ во следењето) го контролира процесот на
забавување, т.е. кога возачот препознава побавно возило, и започнува да
забавува. Со други зборови, дефинира колку секунди, пред да го достигне
безбедносното растојание, возачот започнува да забавува.
- СС4 и СС5 (прагови на следењето) ги контролираат брзинските разлики за време
на следењето. Помала вредност резултира со поосетлива реакција на возачите
во однос на забрзувањето и забавувањето на возилото кое го следат. СС4 се
користи за негативни, а СС5 за позитивни разлики во брзините.
- СС6 (зависност на брзината од осцилациите): влијанието на растојанието врз
осцилациите на брзината во процесот на следење. Доколку е поставено нула (0)
– осцилациите на брзината се зависни од растојанието до следеното возило.
Поголеми вредности резултираат со поголеми осцилации на брзината со
зголемување на растојанието.
- СС7 (осцилации во забрзувањето): вистинското забрзување за време на
процесот на осцилации.
26 PTV AG, VISSIM User Manual, Karlsruhe Germany, April 2011, pp. 132
18
- СС8 (забрзување од состојба на мирување): посакувано забрзување при
стартување од место (ограничено од максималното забрзување дефинирано со
кривите на забрзување).
- СС9 (забрзување при 80 km/h): посакувано забрзување при 80 km/h (ограничено
од максималното забрзување дефинирано со кривите на забрзување).
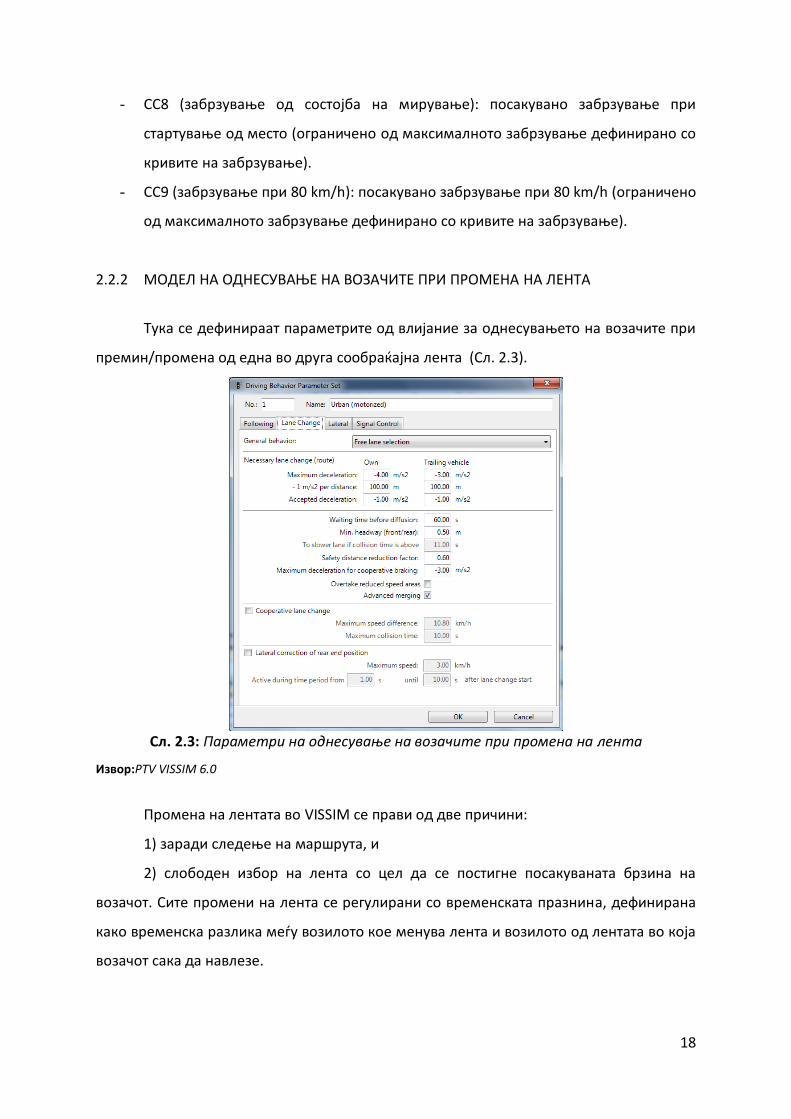
2.2.2 МОДЕЛ НА ОДНЕСУВАЊЕ НА ВОЗАЧИТЕ ПРИ ПРОМЕНА НА ЛЕНТА
Тука се дефинираат параметрите од влијание за однесувањето на возачите при
премин/промена од една во друга сообраќајна лента (Сл. 2.3).
Сл. 2.3: Параметри на однесување на возачите при промена на лента
Извор:PTV VISSIM 6.0
Промена на лентата во VISSIM се прави од две причини:
1) заради следење на маршрута, и
2) слободен избор на лента со цел да се постигне посакуваната брзина на
возачот. Сите промени на лента се регулирани со временската празнина, дефинирана
како временска разлика меѓу возилото кое менува лента и возилото од лентата во која
возачот сака да навлезе.

19
Однесувањето на возачот при промената на лента може да се изрази со
промени во спефицичните параметри на возилото кои ја одразуваат агресивноста на
возачот кој сака да ја промени лентата и на возачот кој се наоѓа во таа лента. Тоа се
параметрите: максимално забавување, стапката на забавување и прифатливото
забавување.
Кога возачот сака да промени лента од која било причина (следење на
маршрута или постигнување на посакувана брзина), основен чекор е да најде
соодветна временска празнина во токовите во целната лента. Големината на
временската празнина зависи од брзината на возилото кое сака да промени лента и од
возилото кое доаѓа одзади во целната лента.
Дополнителни параметри кои влијаат врз промената на лента вклучуваат избор
на: генерално однесување на возачите, минимално растојание на следење
(минимално растојание до возилото што е нанапред, кое мора да биде достапно при
промена на лента во услови кога возилата се застанати), безбедносно растојание и
максимално заедничко забавување (за возилото кое менува лента и возилото кое е во
целната лента).
Изборот на генерално однесување (general behavior) го дефинира начинот на
престигнување. Тоа се поставува доколку им е дозволено на возилата да престигнуваат
од лево (правило на побавна лента) или доколку можат да преминуваат во која било
лента (слободен избор на лента). За градска мрежа, во генерално однесување треба да
се постави слободен избор на лента.
Минималното растојание на следење го одредува потребното минимално
растојание за промена на лента.
Вредноста на максималното забавување за заедничко забавување е
најголемото забавување кое ќе го преземе возилото од целната лента за да дозволи
возилото кое ја менува лента да се вклучи во неговата лента.
Треба да се истакне дека не постои директен начин за промена на агресивноста
на возачите, туку истото се изведува со нагодување на горенаведените параметри.
Промените на лента заради следење на маршрута се дефинираат со
поставување на прагови на забавувања на возилото кое ја менува лентата и возилото
кое е во целната лента, а се движи зад возилото кое ја менува лентата. Опсегот на

20
вредностите на овие забавувања е дефиниран со дефинирање на максимално и
прифатливо забавување.
2.2.3 МОДЕЛ НА СТРАНИЧНО ОДНЕСУВАЊЕ НА ВОЗАЧИТЕ
Во VISSIM, едно возило зафаќа цела ширина на лента. Параметрите на
странично однесување се користат за контрола на интеракцијата на возила кои
патуваат едно до друго во иста лента и истовремено претекнуваат други учесници во
сообраќајот во истата лента доколку има доволен простор. Доколку нема странична
интеракција, овие параметри можат да се занемарат.
Изгледот на графичкиот интерјфес на параметрите за странично однесување на
возачите во сообраќајот се прикажани на Сл. 2.4.
Сл. 2.4: Параметри за странично однесување на возачите
Извор: PTV VISSIM 6.0
Содржани се следните параметри:
- посакувана позиција при слободен ток (средина на лента, движење по желба
или движење по лева страна)
- набљудување на возилата во соседните ленти (одржување на минимално
странично растојание)

21
- редици на возила во облик на дијамант (кога возилата не се движат тие не се
едно до друго, туку едното е поназад/понапред во однос на другото возило),
- земање предвид на наредните свртувања (избегнување на доцни свртувања) -
престигнување во иста лента (од лево или од десно)
- минимално странично растојание (кога возилата не се движат и при брзина од
50 km/h).
2.2.4 МОДЕЛ НА ОДНЕСУВАЊЕ НА ВОЗАЧИТЕ ПРИ КОНТРОЛА НА СООБРАЌАЈОТ СО
СВЕТЛОСНИ СИГНАЛИ
При приближување/наидување на светлосна сигнализација (СС), постојат три
типови на параметри за нагодување:
- реакција на возачот на жолт сигнал
- однесување на возачот на црвено – жолт сигнал, и
- намалување на безбедносното растојание во близина на СТОП линијата.
Параметрите на моделот на однесување на возачите при контрола на
сообраќајот со СС се прикажани на Сл. 2.5.
Сл. 2.5: Параметри за однесување на возачите при контрола на сообраќајот со СС
Извор: PTV VISSIM 6.0

22
Реакцијата на возачот на жолт сигнал може да се базира на моделот на
континуирана проверка или на моделот на една одлука.
Во моделот на континуирана проверка возачот претпоставува дека жолтото
трае две секунди, го проценува неговото растојание до сигналите и пресметува во
секоја секунда од симулацијата дали да застане или да продолжи да се движи сè
додека не ја помине сигналната глава.
Во моделот на една одлука (Decision model: One decision) постојат три фактори
на веројатност 1, и 2 кои се користат за одредување на веројатноста дали возачот
ќе застане за жолт сигнал. Пресметка на веројатноста е според:
dxve
p211
1
27
(2.3)
каде што:
- V е моментната брзина
- dx е растојанието до светлосниот сигнал.
Вредностите на стандардните параметри се добиени по емпириски пат, но
можат да се менуваат.
Однесувањето на возачите на црвено – жолтиот сигнал може да се дефинира
како „Вози“ (исто како зелен сигнал) или „Застани“ (исто како црвен сигнал) во
зависност од специфичните навики и правила во различни држави / области.
Намалувањето на безбедносното растојание во близина на СТОП линијата се
дефинира со факторот на намалување (стандардна вредност 0,6). За промена на лента
пред светлосните сигнали, се дефинираат растојанијата: почеток спротивода од СТОП
линијата и крај/завршеток - низводно од СТОП линијата.
При развојот на микроскопски модел, посебна и многу значајна фаза е
калибрацијата и валидацијата. Оттука, после основните теоретски разгледувања на
моделот и на подмоделите, може да се одредат вистинските параметри кои ќе бидат
користени за прилагодувањета на моделот, а во зависност од карактеристиките на
локалната градска улична мрежа и корисниците.
27David Michael Miller, D., DEVELOPING A PROCEDURE TO IDENTIFY PARAMETERS FOR CALIBRATION OF A VISSIM MODEL, Georgia, May 2009, pp. 11

23
2.3 Калибрација и валидација на симулациски модел
Некои од основните дефиниции во постапката на калибрација и валидација се:
Калибрација - множество на операции коишто под одредени услови
воспоставуваат врска меѓу вредностите што се добиени од мерен инструмент или
систем за мерење и соодветните вредности измерени од реалноста.28
Калибрација на компјутерски модел - процес на прилагодување и детално
нагодување на параметрите на моделот со употреба на веродостојни податоци
коишто ги рефлектираат локалните сообраќајни услови.
Валидација – постапка на утврдување на степенот до кој моделот или
симулацијата точно ја отсликува реалната состојба, за да се одреди дали се
задоволени одредените цели.29
Ревалидација - Повторувачка валидација за метод кој веќе бил валидиран.30
2.3.1 ИЗБОР НА ВЛЕЗНИ ПАРАМЕТРИ ЗА КАЛИБРАЦИЈА ВО VISSIM
Параметрите за калибрација во софтверот VISSIM може да се поделат во повеќе
категории, пред сè во зависност од целите на истражувањето и дефинираните мерки
на ефикасност. Но, најчести се параметрите прикажани во Таб. 2.1.
28 National Conference of Standards Laboratories, NCSL RP-1, 1996 29http://www.thefreedictionary.com/validation 30ISRAC Validation policy, 1-661004, version 04, 2007

24
Таб. 2.1: Листа на параметри за калибрација во VISSIM
Бр. Параметар
1 Опсег на симулацијата
2
Параметри за
следење на возилата
Максимално растојание на прегледност
3 Просечно растојание при мирување на возилата
4 Дополнително безбедносно растојание
5 Повеќекратно безбедносно растојание
6 CC0, Просечно растојание при мирување на
возилата
7 CC1, Интервал на следење
8 CC2, Варијација на следењето
9 CC3, Праг за започнување на следењето
10 CC4, Негативен праг на следење
11 CC5, Позитивен праг на следење
12 CC6, Зависност на брзината од осцилациите
13 CC7, Осцилации при забрзувањето
14 CC8, Забрзување од позиција на стоење (од место)
15 CC9, Забрзување при 80 km/h
16
Параметри за
промена на лента
Максимално забавување
17 Степен на намалување ( 2/1 sm на растојание)
18 Прифатливо забавување
19 Време на чекање пред дифузија
(распространување)
20 Минимално растојание на следење
21 Дистрибуција на посакувана брзина
22 Приоритет на
токовите
Минимална временска празнина
23 Минимално растојание на следење
Извор: Мicroscopic simulation model calibration and validation handbook31
Треба да се напомене дека при изборот на податоците за калибрација,
потребно е да се разгледаат:
1. Тешкотиите при прибирање на податоци: многу е важно да се разгледа
достапноста при прибирањето на потребните податоци
2. Сензитивноста на избраните параметри на сообраќајните услови: параметрите
за калибрација треба да се ,,чувствителни" на сообраќајните услови од терен,
31Park, B., Won, J., MICROSCOPIC SIMULATION MODEL CALIBRATION AND VALIDATION HANDBOOK, October 2006, Richmond, Virginia, pp 30

25
бидејќи калибрацијата се отежнува доколку параметарот не е осетлив на
сообраќајните услови
3. Доследност и веродостојност на калибрацијата на моделот: после завршената
калибрација, потребно е на аналитички начин да се пресмета колку точно
симулацискиот модел ја отсликува реалноста. Веродостојноста на моделот
најчесто се утврдува со примена на статистички тестови.
Врз основа на досегашните анализи и истражувања, во Гл. 3 ќе биде прикажана
целокупната методологија на калибрација и валидација на моделот во VISSIM.

26
3 МЕТОДОЛОГИЈА НА КАЛИБРАЦИЈА И ВАЛИДАЦИЈА ВО VISSIM
Анализата на досегашните искуства (Гл.2) покажува дека методологиите се
разликуваат во зависност од:
- софтверската алатка којашто се употребува
- изборот на мерките за ефикасност
- начинот на прибирање на податоците
- целта на истражувањето
- начинот на валидација и верификација
- примената на статистичките тестови, и
- потребниот број на симулации.
Што се однесува само до изборот на параметрите за калибрација на моделот,
тој може да се однесува на следните параметри:
- токови на возила
- брзина
- време на патување
- интервал на следење на возилата
- сообраќајна побарувачка
- избор на маршрута
- сообраќајна контрола
- однесување на возачите (пр.: растојание при промена на лента)
- должина на редови
- временски доцнења
- забрзување
- емисии на издувни гасови
- број на застанувања, итн.
На Диј. 3.1 прикажана е проектираната методологија на калибрација и
валидација за микросимулациски модел.

27
Диј. 3.1: Методологија на калибрација и валидација
Извор: Изработено од магистрантот

28
Во натамошниот текст ќе бидат објаснети секоj од дефинираните елемeнти од
методологијата.
3.1 Креирање и развој на симулациски модел
Креирањето на симулацискиот модел ги опфаќа оние задачи коишто се
извршуваат пред почетокот на калибрацијата на моделот. Овие задачи вклучуваат: 1)
дефинирање на обемот и целите на истражувањето, 2) дефинирање на подрачје на
опфат, 3) одредување на мерки на ефикасност, 4) прибирање на податоци од терен и
4) кодирање на сообраќајната мрежа.
3.1.1 ДЕФИНИРАЊЕ НА ОБЕМ И ЦЕЛ НА ИСТРАЖУВАЊЕТО
Обемот на истражување всушност ја дефинира големината и опфатеноста на
истражувањето. Истражувањето може да се однесува на ниво на цел град, на дел од
градска мрежа или само на една крстосница, делница од автопат, паркиралиште,
паркинг простори во градска средина, итн.
Целите на истражувањето се тесно поврзани со неговата примена. Како цел на
одредено истражување може да се вбројат: развој на методологија, организација на
паркинг простор, стратегија за контрола на сообраќајот, управување со одредени
видови сообраќај (товарен, јавен превоз итн.) и др.
Цел на ова истражување е да се предложи и оцени методологија за
калибрација и валидација на сообраќаен микроскопски симулациски модел.
Валидноста на предложената методологија е изведена на студија на случај на мрежа
од осум крстосници во ЦГП на град Виница со примена на VISSIM.

29
3.1.2 ДЕФИНИРАЊЕ НА ПОДРАЧЈЕ НА ОПФАТ
Подрачјето на опфат всушност претставува дел од сообраќајната
инфраструктура за која ќе се анализираат сообраќајните услови и ќе се преземат
инженерски чекори. Истражувано подрачје може да биде делница на автопат,
единечна крстосница, дел од градска или рурална мрежа, паркиралиште итн. Многу е
важно детално да биде дефинирано со цел да се разгледаат сите аспекти од неговото
функционирање. После одредувањето на границите на истражуваната област, следува
изборот на мерки за ефикасност, прибирање на податоци од терен и кодирање на
мрежата.
3.1.3 ОДРЕДУВАЊЕ НА МЕРКИ ЗА ЕФИКАСНОСТ
Видот и бројот на мерките за ефикасност зависат од големината и
комплексноста на истражувањето/проектот. Според својата природа тие може да
бидат: квалитативни и/или квантитативни.
Квантитативни мерки се: брзината и времето на патување, коефициентот за
забрзување и забавување на возилата, должина на редовите итн. Квалитативните
мерки може да бидат само детектирани, но не и прецизно измерени (Пр.:
растојанието на промена на лента, карактеристики во следењето на возилата,
идентификација на зачестеност на задушувања и појава на тесни грла, итн.).
Одредени мерки може да бидат истовремено квантитативни и квалитативни.
Така на пример, податоците за должините на редовите на возила и задушувањето
може да бидат квалитативни и квантитативни мерки. Тие се лесно препознатливи
сообраќајни феномени кои можат да се идентификуваат/детектираат преку одредени
извори (пр.: видео снимање, фотографирање), но исто така можат и да бидат
измерени и со методите на прибирање на податоци.
Прирачникот за анализа на капацитет HCM (Highway Capacity Manual (HCM)
2000) препорачува кои мерки да се дефинираат во зависност од типот на сообраќаен
инфраструктурен објект (Таб. 3.1).

30
Таб. 3.1: Мерки за ефикасност според тип на сообраќаен објект
Тип на објект Мерка на ефикасност (МОЕ)
Основни делници на автопат Густина (возила/км/лента)
Рампи Густина (возила/км/лента)
Пристапни рампи кон
автопат Густина (секунди/возило)
Автопати со повеќе ленти Густина (возила/км/лента)
Автопати со две ленти Процентуално време на следење (%),
Просечно време на патување (км/h)
Сигнализирани крстосници Временски загуби/возило (секунди/возило)
Несигнализирани
крстосници
Просечни временски загуби/возило
(секунди/возило)
Градски сообраќајници Просечна брзина на патување (км/h)
Извор: Park, B., Won, J., MICROSCOPIC SIMULATION MODEL CALIBRATION AND VALIDATION HANDBOOK, Richmond, Virginiа, October 2006, pp. 9
Сепак, и покрај препораките од HCM, разумно е да се одберат и податоци кои
зависат од условите на терен и други ограничувања.
3.1.4 ПРИБИРАЊЕ НА ПОДАТОЦИ ОД ТЕРЕН
Во областа на сообраќајно–транспортното инженерство постојат голем број на
начини и методи за прибирање на податоци. Методите за прибирање на податоци за
протокот опфаќаат: рачни броења, системи за автоматско броење, броење на
сообраќајот од видео снимки итн.32 Во методи на прибирање на податоци за време на
патување и временски загуби се вбројуваат: метод на просечно возило, метод на
подвижно возило и методите на интервју и регистарски таблици. За прибирање на
податоци за брзина, се применуваат: рачно набљудување, електронски мерач на
брзината, радар, снимање со камера, со штоперица, со метод на регистарски таблици,
со фотографирање итн. Методите за снимање на изворно целни патувања се едни од
посложените. За овие снимања се употребуваат методите на: распределба на
сообраќајот на крстосници, броење на скрин линија, интервју, анкети со поштенски
картички, снимање со помош на лепенки и регистарски таблици.
32 Бомбол, К., ОСНОВИ НА СООБРАЌАЈНО ИНЖЕНЕРСТВО, интерни предавања, ТФБ, Битола 2009

31
Доколку моделот којшто се развива се користи за специјални услови, како на
пр.: зони на работа на патот, специјални настани, тогаш пожелно е прибирањето на
податоците да биде направено во ден кога владеат слични сообраќајни услови на
терен.
За потребите на истражувањето, прибирањето на податоците се изврши со
помош на камера. Со обработка на видео записите се добиени сообраќајните протоци
според приоди/ленти и категории на возила, како и податоци за времето на патување
на делница.
Откако ќе се направи прибирање на „суровите“ податоци, истите треба да се
обработат и да се анализираат. Во наједноставните случаи, анализата и обработката на
податоците се состои од претворање на податоците од категоризација на протоците во
еквиваленти на патнички автомобил. Во посложените случаи, за комплексни
истражувања потребна е компјутерска анализа на патувањата, распределба на
патувањата, сообраќајни проекции и други анализи.33 Освен конверзијата на
„суровите“ податоци во ПАЕ, потребни се и други аналитички и графички анализи и
обработки на податоците. Тука се вбројуваат:
1. Одредување на врвен час, според интензитетот на протоците
2. Одредување на процентуално учество на видовите возила
3. Графичко претставување на податоците во форма на табели, дијаграми, мапи и
сл.
3.1.5 КОДИРАЊЕ НА МРЕЖАТА
Кодирањето на мрежата претставува проектирање на мрежата заедно со сите
геометриски карактеристики и сообраќајни услови.
1) Податоци за геометриските карактеристики
После вчитувањето на tif подлогата (графички формат на подрачјето од
интерес), се поставувуваат физички и оперативни карактеристики на линковите. Во
33Ministry of Works and Transport, Roads Department, TRAFFIC DATA COLLECTION AND ANALYSIS, February
2004, Gaborone, Botswana

32
оваа фаза се дефинираат карактеристиките на сообраќајната инфраструктура.
Основните податоци вклучуваат:
- Број на ленти
- Ширина на лента
- Растојание меѓу крстосници
- Агол на поставеност на приодите
- Наклон на делници
- Закривеност на делници
- Состојба на коловозот (сув, влажен, каллив итн.)
- Поставеност на сигнализација (хоризонтална, вертикална и светлосна)
- Локација на стојалишта
- Пешачки премини и останати објекти за пешаците
- Велосипедски патеки/ленти
- Останато.
2) Тип на контрола
Можните типови на контрола кои се дефинираат на мрежата се:
- СТОП знаци - се поставуваат на пристапите од споредните улици кои се
контролирани со знак за задолжително запирање. Контролата на овие приоди
се надополнува со поставување и на приоритет меѓу токовите (пешачки и
моторизирани) и/или дефинирање на конфликтни зони
- Приоритет на токовите – се дефинира со две опции: правила за приоритет
(priority rules) или дефинирање на конфликтни зони (conflict areas). При
поставувањето на правилата за приоритет се дефинираат: минималната
временска празнина (minimum gap time), минималното растојание на следење
(minimum headway), како и типовите на возила за кои се однесуваат правилата
за приоритет. Дефинирањето на конфликтните зони опфаќа параметри за
временската празнина меѓу последното возило кое ја минува крстосницата
(главен приод) и предниот дел на возилото кое сака да се вклучи во токот (од
споредниот приод) (front and rear gap), фактор за безбедносно растојание

33
(safety distance factor) и дополнително растојание на сопирање (additional stop
distance).
- Светлосна сигнализација (фиксна, поттикната и адаптивна контрола) – најпрво
се дефинираат сигналните контролери (со нив се дефинира типот на сигнална
контрола – фиксна, поттикната и адаптивна). Се дефинираат сигналните
фази/состојби и сигналните планови.
- Пристапни рампи (на автопат, паркинг, итн.).
3) Сообраќајни операции и податоци за управување
Сообраќајните операции и податоците за управување на сообраќајот на
линковите се состојат од:
- податоци за регулирање (ограничување на брзината, променливо
ограничување на брзината, пополнетост на возилата, свртување, канализирање
на токовите, искористеност на лента, итн.)
- податоци за водење на сообраќајот (знаци со променливи пораки)
- алатки за прибирање на податоци (јазли, бројачи на редици, мерење на време
на патување, итн.).
4) Податоци за сообраќајна побарувачка
Сообраќајната побарувачка се дефинира како број на возила и процентот за
секој тип на возила кои се движат во истражуваната област за време на периодот на
симулацијата.
VISSIM овозможува приказ на варијацијата во побарувачката за време на
периодот на симулирање преку внесување на податоци поделени во интервали. Ова
значи дека освен часовно, протоците можат да се внесуваат во 5 и 15 минутни
интервали. Влезните податоци се поставуваат само на влезните делници на
крстосницата или мрежата. Клучни податоци за сообраќајната побарувачка се:
- влезни протоци со процентуална застапеност на видовите возила
- маршрути на движење на возилата, односно распределба на сообраќајот на
крстосници. Распределбата може да се направи процентуално, или нумерички

34
- податоци за јавен градски превоз (маршрути, интервал на следење итн.), и
- податоци за пешаци и велосипедисти.
5) Параметри за однесување на возачите
Податоците за однесување на возачите вклучуваат:
- Посакувана дистрибуција на брзината (брзина која возачите постојано се
обидуваат да ја одржат во зависност од сообраќајните услови)
- агресивност на возачите (минимално растојание на следење, временска
празнина за промена на лента, однесување на жолто и црвено – жолто светло
на СС)
- достапност на информации за возачот
- одговор на возачот на информациите (за планирање или промена на
маршрута).
При развојот и креирањето на основниот модел, овие параметри не се
менуваат, истите се менуваат при калибрацијата на моделот.
6) Параметри за типовите возила
Параметрите за возилата ги дефинираат карактеристиките на типовите возила:
минимално, максимално и посакувано забрзување и забавување, маса, моќност,
пополнетост. Овие карактеристики се генерални и се поставуваат во зависност од
возниот парк во државата (просечна старост, перформанси на возилата, итн.).
7) Податоци за специјални настани
Податоците за специјални настани вклучуваат блокади, инциденти, работа на
патот, паркирање во пешачки зони и површини итн. Овие податоци се дополнителни и
варираат во зависност од примената на микросимулацискиот модел.

35
8) Параметри за контрола на симулацијата
Овозможуваат дефинирање на:
- времетраење на симулацијата
- број на симулации
- брзина на симулацијата
- избор на излезни мерки за ефикасност (извештаи, фајлови од анимацијата)
- резолуција на резултатите од симулацијата (привремена и специјална
резолуција), и
- останати системски параметри за иницијализација на симулацијата.
3.2 Проверка на грешки
Со овој чекор се овозможува процесот на калибрација да предизвика
добивање на т.н ,,искривени параметри“ кои се неточни и настанале заради
занемарувањето на грешките при кодирањето.34
Проверката на грешки вклучува повеќе видови прегледи на: мрежата,
побарувачката и стандардните параметри. Се состои од три чекори:35
1. Проверка на грешки при внесувањето на податоци
2. Проверка на грешки од софтверот
3. Проверка на анимацијата за согледување на помалку очигледни влезни грешки.
1) Проверка на грешки при внесувањето на податоци
Тука се вклучени следните типови на проверки:
- на мрежата (конекција, геометрија на линкови, контрола на крстосници,
забранети движење, ограничувања на ленти)
- на побарувачката (% застапеност на токовите, извори на протоците, проверка на
протоците, пополнетост на возилата, % на возила во свртување, карактеристики
на возилата и патувањата, типови и перформанси на возилата, итн.).
34Traffic Analysis Toolbox Volume III: Guidelines for Applying Traffic Microsimulation Software, pp 45 35Ibid.

36
2) Проверка на грешки од софтверот
При иницијализација на симулацијата, софтверот сам проверува и јавува
евентуални грешки од типот нема конекција меѓу линкови, неправилна поставеност на
маршрути, недефинирани движења, итн. Предност е што VISSIM точно јавува со код кој
параметар не е во ред, а со тоа го прави отстранувањето на грешката многу полесно.
3) Преглед на анимацијата
Анимацијата овозможува да се види однесувањето на возачите и одвивањето
на сообраќајот кое е моделирано и да се процени реалноста на самиот модел. При
самиот преглед на анимацијата може да се согледа несоодветно движење на возилата
(неочекувано забавување и запирање, недозволено движење, преплетување на
токови, грешки во приоритетот на токовите итн.). Најоптимално е анимацијата да се
набљудува на клучни места (крстосници, пешачки премини, рампи итн.) за да се
утврди дали истата е реална.
Откако почетниот модел е креиран и се направени сите проверки за евентуални
грешки, почетната евалуација на моделот со зададени (default ) параметри.
3.3 Почетна евалуација на моделот со зададени (default) параметри
Почетната еваулација на моделот се изведува со зададени (default) вредности
на влезните параметри. Добиените излезни резултати од моделот, со вака поставени
параметри, се споредуваат со податоците измерени од терен. Почетната евалуација се
однесува на сите параметри/мерки за ефикасност кои се цел на процесот на
калибрација. Ако зададените параметри продуцираат прифатливи излезни резултати
согласно тестот на изводливост, може да се прескокне постапката на калибрација, и да
се премине директно кон валидација на моделот. Ова е корисно бидејќи се заштедува
време и вложен труд.
Доколку не постојат значајни отстапувања односно излезните резултати
се задоволителни, тогаш изработениот модел е соодветен за натамошна анализа,

37
и директно се преминува на валидација на истиот. Во спротивно, треба да се
извршат чекорите на почетната калибрација и тестот на изводливост.
3.4 Почетна калибрација
Прибраните податоци за калибрација од терен се користат како целна
вредност, која симулацискиот модел треба да ја произведе како излезна вредност.
Калибрацијата и тестот на изводливост се јавуваат во вид на итеративна јамка, после
почетната евалуација.
Калибрацијата на моделот може да се подели во две поткатегории: системска и
оперативна калибрација.
Делот на системска калибрација е највисоко ниво на калибрација. Целта на
системската калибрација е да одреди каде се внесени неправилности во процесот на
креирање на основниот модел и да го одреди нивниот ефект врз севкупните системски
операции. Доколку при разгледувањето на податоците од валидацијата после
итеративните симулирања, разликите во симулираните мерења и мерењата од терен
значително се разликуваат, треба да се преземат натамошни истражувања во
параметрите на системска калибрација. Калибрацијата во оваа фаза претежно се
потпира на целите на проектот и евалуација на влезните параметри на моделот.
Во параметри на системската калибрација се вбројуваат претпоставките за
изборот на маршрута на возила, влезните податоци за протоците, структурата на токот,
границите на истражуваната област, брзината на возилата, типот на контрола на
сообраќајот, геометриските карактеристики на сообраќајната инфраструктура итн.
Оперативната калибрација е процес на промена на параметрите на моделот
кои влијаат врз севкупните сообраќајни операции на истражуваната транспортна
мрежа. Оперативната калибрација се состои од промена на деталните параметри за
однесувањето на возачите кои влијаат врз вкупниот капацитет на транспортните
објекти, агресивноста на возачите и локациите на промена на лента. Оперативната
калибрација е неопходна за моделирање на однесувањето на возачите во урбани
средини кое може да влијае врз сообраќајниот ток, брзините, капацитетот и
задушувањето.

38
Примери за параметри на оперативна калибрација се карактеристики на
следење на возилата (растојание при возење, растојание при застој, безбедносно
растојание) прифатливи забрзувања и забавувања при промена на лента, растојание
на промена на лента и избор на лента. За да се комплетира оперативната калибрација,
потребно е повеќе време и ресурси.
3.4.1 ИДЕНТИФИКАЦИЈА НА ПАРАМЕТРИ ЗА КАЛИБРАЦИЈА
Мерките за ефикасност треба да се во директна поврзаност и зависност со
селектираните параметри за калибрација. Пример за ваква зависност можат да бидат:
- брзина – време на патување
- временски загуби – ниво на услуга
- интензитет на токови - должина на ред.
Селектирањето на параметрите за калибрација се врши од групата на
контролирани влезни параметри – оние што може да се менуваат, коригираат. Потоа
овие параметри се нагодуваат согласно валидационите цели на процесот на
калибрација и валидација.
Исто така, потребно е да се знае кои податоци за калибрација можат да се
добијат при симулацијата на моделот.
Прибирањето на излезните податоци во VISSIM може да се изврши со помош
на: креирање на јазли, бројачи на должината на редот или запишување на податоците
во посебни излезни фајлови и/или во база на податоци. Податоците може да бидат
прикажани вкупно или според одделни видови на сообраќај.
Екстензиите на излезните фајлови од VISSIM за типови на податоци за
калибрација се прикажани во Таб. 3.2.
Таб. 3.2: Типови на излезни фајлови од VISSIM
Тип на фајл Податоци за калибрација
*.vlz Временски загуби
*.fzp Брзина, пополнетост на возила, итн.
*.stz Редици на возила
*.rsz Време на патување
Извор: PTV VISSIM 6.0

39
Изгледот на менито за избор на излезни резултати од VISSIM е прикажан на Сл.
3.1.
Сл. 3.1: Изглед на менито за избор на излезни резултати од VISSIM
Извор: PTV VISSIM 6.0
3.4.2 ОДРЕДУВАЊЕ НА ПРИФАТЛИВИ ГРАНИЦИ НА ВРЕДНОСТИТЕ НА ПАРАМЕТРИТЕ
Прифатливите граници се добиваат со постапка на тестирање. Ова значи дека се
задаваат одредени гранични вредности на параметрите и се прави пробно
симулирање. Од резултатите од пробното симулирање се забележува дали истите се
доближуваат или се оддалечуваат со вредностите добиени од терен.
Соодветно на воочените промени во излезните резултати, се реагира со
поместување на граничните вредности (со зголемување или намалување на нивните
вредности).
Откако ќе се одредат најдобрите прифатливи граници на вредностите на
параметрите, симулацијата се стартува повеќекратно (во ова истражување, 10 пати).
Потоа се преминува кон следниот чекор – тестот на изводливост.

40
3.4.3 ПОВЕЌЕКРАТНО СИМУЛИРАЊЕ
Повеќекратното симулирање треба да се спроведе и за секое сценарио од
проектираниот модел. Излезните резултати треба да бидат забележани после секоја
иницијализирана симулација.
Резултатите од секоја изведена симулација може да се разликуваат и до 25 %.36
Со користење на генераторот на случајни броеви се генерираат различни времиња на
доаѓање на возилата во влезните токови, различен тип на возилата кои ќе бидат
вчитани и сл.
Бидејќи е јасна важноста на повторувањето на симулацијата, следното
прашање би било: „Колку пати треба да се повтори симулацијата?“ Потребно е да
се спроведе статистичка постапка која е составена од следните 4 чекори:37
1. Спроведување на неколку повторувања на симулацијата – можеби ќе бидат
потребни повеќе од 100 симулации за да се покрие целата дистрибуција. Сепак,
може да се предвидат можните варијации на излезните резултати со анализа на
податоците од неколку последователни симулации за да се најде прифатлив
број на симулации. Минимален број на последователни стартувања на
симулациите е 4 (четири).
2. Проценка на стандардно отстапување на податоците од примерокот – со
податоците од првиот чекор, се прави проценка на стандарното отстапување.
Стандардното отстапување се пресметува според следната равенка:
1
)( 2
2
N
xxS (3.1)
каде што:
– x е излезната вредност за секое повторување на симулацијата
- x е просечната вредност од сите симулации
- N е бројот на повторувања на симулацијата
36 FHWA, Traffic Analysis Toolbox Volume III: Guidelines for Applying Traffic Microsimulation Software ,Washington, july, 2004, pp. 77 37 Park, B., Won, J., Microscopic Simulation Model Calibration and Validation Handbook, Washington, October 2006, pp. 18-20

41
3. Одредување на степен на доверливост – одредување на тоа колку прецизна
може да биде проценката. Најчесто употребуван концепт е 95% степен на
доверливост.
4. Пресметка на минимален број на повторувања на симулацијата - потребниот
број на симулации се пресметува според:
N
StC N 1),2/1(2 (3.2)
каде што:
- C = 1 – Ниво на доверливост38
- е нивото на значајност
- S е стандардното отстапување
- 1),2/1( Nt е t-променлива кај Студентовата распределба (Студентова променлива) со
2/1 ниво на значајност и N-1 степени на слобода (вредноста на оваа случајна
променлива се отчитува од таблица за Студентова распределба).
Најчесто употребуваните вредности се прикажани во Таб. 3.3.
Таб. 3.3: Минимален број на повторувања според посакуваното ниво на значајност
SC /1 Ниво на доверливост Минимален број на повторувања
0,5
99 % 130
95 % 83
90 % 64
1,0
99 % 36
95 % 23
90 % 18
1,5
99 % 18
95 % 12
90 % 9
2,0
99 % 12
95 % 8
90 % 6
Извор: Microscopic Simulation Model Calibration and Validation Handbook39
38 Нивото на доверливост во изразот е децимален број: 90% = 0,9, 95% = 0,95 итн. 39 Park, B., Won, J., Microscopic Simulation Model Calibration and Validation Handbook, Washington, October 2006, pp. 20

42
Статистичките пресметки треба да се применат за да се одреди бројот на
повторувања на симулациите. Сепак, инженерската проценка е најчесто применувана
за одредување на бројот на симулации.
3.5 Тест на изводливост
Има цел да утврди дали податоците од терен се поклопуваат со податоците од
моделот. Доколку степенот на совпаѓање не е доволен, се врши нагодување на
границите на вредностите на параметрите, и повторно се враќаме на почетна
калибрација.
Процесот се повторува сѐ додека симулациските резултати не се во прифатливи
граници со податоците од терен. Излезните резултати од секое повторување се
прикажуваат со помош на хистограми. Се анализираат излезните параметри на
ефикасност за секој калибриран параметар.
3.5.1 СПОРЕДБА НА СИМУЛИРАНИТЕ РЕЗУЛТАТИ СО РЕЗУЛТАТИТЕ ОД ТЕРЕН
Излезните резултати од повеќекратните симулирања на моделот се
споредуваат со прибраните податоци од терен и се одредува дали степенот на
совпаѓање ги исполнува целите на валидацијата за да се одреди дали е потребна
дополнителна калибрација.
Ако разликата не е на прифатливо ниво, следната симулација се врши со процес
на фино нагодување на калибрираниот параметар односно на границите на
вредностите на параметрите, сѐ додека разликата не достигне прифатлив опсег,
односно може да се смета како најдобра вредност на калибрираните параметри.
Со споредбата во тестот на изводливост се одредува колку точно
симулацискиот модел ги отсликува условите на одвивање на сообраќајот од терен, врз
основа на целите на валидацијата.
Исто така, потребно е да се постави и минимална гранична вредност за
степенот на совпаѓање на моделираните со резултатите од терен. Вредностите на
излезните резултати од симулацијата треба да се совпаѓаат со минимум 90% од

43
измерените вредности од терен, односно најголемото отстапување да биде 10%. Ова
графички е прикажано на Сл 3.2.
Сл. 3.2: Концепт на прифатлива област
Извор: Park, B., Won, J., MICROSCOPIC SIMULATION MODEL CALIBRATION AND VALIDATION HANDBOOK, Richmond, Virginiа, October 2006, pp. 32
Откако ќе се направи споредба на вредностите на излезните резултати, се врши
тест на изводливост. Доколку тестот не задоволува, се прави нагодување на границите
на вредностите на параметрите. Изнаоѓањето на оптималните граници на параметрите
се врши со нивна постојана промена и стартување на симулацијата за да се согледа во
која насока се движат излезните резултати во однос на оние од терен – дали се
приближуваат или се оддалечуваат, сѐ додека не се исполни степенот на совпаѓање на
моделираните резултати со оние од терен. Кога тестот на изводливост ќе даде
задоволителни резултати, се преминува кон валидација на моделот.
3.6 Валидација на моделот
Валидација се користи за да се одреди дали процесот на калибрација достигнал
одредено ниво на прифатливост меѓу мерките на ефикасност од симулацискиот модел
и измерените од терен.
И покрај доверливоста на напредните софтверски алатки за микросимулација,
сепак се препорачува излезните резултати да подлежат на класична математичка
проверка. Најчесто за оваа намена се употребуваат статистички тестови. Во процесот
на валидација се врши приказ на излезните резултати, примена на статистички тестови
и визуелна проверка на моделот.

44
3.6.1 ПРИМЕНА НА СТАТИСТИЧКИ ТЕСТОВИ
Дел од статистичките тестови кои можат да се употребат во анализата на
излезните резултати од сообраќаен микросимулациски модел, се:
- GEH тестот
- Студентовиот t-тест
- Тестирањето според некоја распределба
- Тестирањето на хипотези
- Дескриптивната статистика (аритметичка средина, медијана, мода, стандардно
отстапување, итн.)
- Хи квадрат тестот
- Анализата на варијанса (АНОВА)
- Мултиваријатната анализа на варијансата (МАНОВА)
- Линеарната мултипла регресија
- Дискриминантната анализа
- Факторската анализа.
Во продолжение детално ќе биде објаснет тестот наменет за споредба на
сообраќајните токови – GEH тестот.
3.6.1.1 GEH тест
GEH тестот го добил името од Џефри Е. Хаверс (Geoffrey E. Havers), кој го открил
во 70- тите години од минатиот век, додека работел како транспортен планер во
Лондон, Англија. GEH тестот претставува статистичка емпириска формула која се
докажала како корисна за различни цели на сообраќајна анализа во сообраќајното
инженерство за компарација на две множества сообраќајни протоци – набљудувани и
моделирани. Иако неговата математичка форма е слична на Хи – квадрат тестот, сепак
GEH не е вистински статистички тест.
GEH статистичкиот тест е мерка за тоа колку добро се вклопуваат
набљудуваните и моделираните токови. Место компарација на токови со употреба на
процентуална разлика, GEH статистичкиот тест е попрактичен и поконцизен при
компарација на големи отколку на мали токови.

45
Се пресметува според изразот:
2/)(
)( 2
CM
CMGEH
40 (3.3)
каде што:
- М е часовен сообраќен ток од моделот (или од нови броења)
- C е часовен сообраќен ток од реалните броења (или ,,стари“/претходни броења)
Со примена на GEH тестот се избегнуваат одредени ,,стапици“, кои се јавуваат
при користење на процентите во споредувањето на две множества на токови. Тоа е
затоа што сообраќајните токови во реалните транспортни системи варираат во
пошироки граници. GEH тестот го решава овој проблем, бидејќи тестот статистички е
нелинеарен. Еден праг/граница на прифаќање, заснова на GEH, може да се користи за
широк распон на сообраќајни токови.
GEH тестот се применува кога се споредуваат:41
1. Множество на токови добиени од рачни броења со множество на токови од
автоматски бројачи (на пр.: пневматски црева, индуктивни јамки, итн.) на исти
локации
2. Сообраќајни токови од тековната година со токови измерени од претходната
година (за истите локации)
3. Сообраќајни токови добиени од модел за прогноза на побарувачка за патување
(за сценарио „базна“ година) со реални токови.
Границите според кои се одредува совпаѓањето на токовите од моделот со
реалните токови се следни:
- Ако GEH<5, може да се сметаат дека моделираните и измерените часовни
токови добро се вклопуваат
- Ако 5<GEH<10, може да се изврши натамошно истражување
- Ако GEH>10, постои голема веројатност дека постои проблем или со моделот за
сообраќајна побарувачка или со податоците (причината може да биде грешка
при внесување на податоците во моделот или сериозен проблем со
калибрацијата на моделот)
40 Smith, Ј., & Blewitt, R., TRAFFIC MODELLING GUIDELINES TFL TRAFFIC MANAGER AND NETWORK PERFORMANCE, Best Practice, Version 3.0, Transport for London, September 2010 41 http://en.wikipedia.org/wiki/GEH_statistic

46
Помали GEH вредности значат поголемо вклопување на токовите од моделот со
реалните броења.
Во Таб. 3.4 се прикажани прифатливите вредности за валидација на часовните
протоци, како и предлози како да се одвива процесот на валидација во однос на
големината на вредностите кои се споредуваат.
Таб. 3.4: Критериуми и мерки за валидација
Критериуми и мерки Водич за прифаќање
Припишани часовни токови споредени со
набљудуваните токови
1. Отстапување до 100 воз/час за токови < 700
воз/час
2. Отстапување до 15 % за токови од 700 – 2700
воз/час
3. Отстапување до 400 воз/час за токови > 2700
воз/час
4. Вкупни токови (за > 5 линкови) да биде до 5 %
5. GEH тест
i) Индивидуални токови: GEH < 5
ii) Вкупни токови на скрин линија42 (Screen Line):
GEH <4
> 85 % од случаите
Сите скрин линии
> 85 % од случаите
Сите скрин линии
Моделирано време на патување споредено со
набљудуваното
6. Време до 15 % (или една минута, при поголеми
вредности)
> 85 % од маршрутите
Извор: Design manual for roads and bridges, Volume 12, Section 2, May 1996, pp. 4/29
Моделот кој не ги исполнува условите од табелата сѐ уште може да биде
прифатлив за оценување на одредена ситуација доколку разликите се во рамките на
точноста на истражувањето и големите разлики се концентрирани далеку од областа
на најголемата важност на таа сообраќајна ситуација. Спротивно, доколку моделот ги
исполнува условите дефинирани во табелата, но има значителни разлики на
најкритичните линкови, може да биде неприфатлив.
42 Скрин линија е замислена линија која минува преку група на бројачки места. Карактеристична е при броење на сообраќајот на мрежи, односно ги зафаќа сите бројачки места на влезните линкови на мрежата.

47
3.6.1.2 t–Тест
Студентовиот t-тест (Student's t-test) е најчесто употребуван параметриски тест
за верификација нeстатистичка хипотеза. Тој се појавува како:
- t-тест за тестирање на нултата хипотеза според која средната вредност на
примерокот е еднаква на однапред зададена вредност а т.е. H0(μ=а)
- t-тест за тестирање на нултата хипотеза за еднаквост на средните вредности на
две статистички множества преку нивните примероци (два мали или два големи
примероци) т.е. H0(μ1=μ2).
Во овој случај се користи t–тест за еднаквост на средните вредности при што
треба да се познаваат параметрите на статистичките маси: големинатa на примероците
(n1 и n2), стандардните отстапувања (s1 и s2) и аритметичките средини ( X 1 и X 2).
Грешката на оценката на аритметичките средини на основните маси ја
пресметуваме врз основа на стандардните отстапувања на примероците според:
2
2
2
1
2
1
21 n
s
n
ss
XX
(3.4)
Студентовиот t-тест се сведува на пресметување на големината на t-
променливата како количник од разликата на аритметичките средини и стандардната
грешка на оценката на таа разлика:
21
21
XXs
XXt
(3.5)
Толкувањето на добиената вредност на t-тестот се прави според Студентовaта t-
распределба со одреден број степени на слобода и со отчитување од таблиците на
критичните вредности на t -распоредeлбата.
Од претходно наведеното произлегуваат следниве правила:
- Ако реализираната средна вредност е помала од граничните таблични
вредности при одреден број степени на слобода и зададено ниво на значајност,
тогаш нема причина да се отфрли нултата хипотеза 0H , а евентуалната разлика
може со веројатност во зависност од нивото на значајност да се смета за
случајна (т.е. дека не е битна или значајна). Така, ако t реализирана < t (n-1; 0,05) тогаш
не се отфрла нултата хипотеза со ризик од 5%.

48
- Обратно, ако реализираната t-вредност е еднаква или поголема од граничната
таблична вредност, за одреден број степени на слобода и ниво на знaчајност,
тогаш нултата хипотеза 0H се отфрла како неточна, а се прифаќа
алтернативната хипотеза 1H . Така, ако tреализирана ≥ t(n-1;0,05) тогаш се отфрла
нултата хипотеза 0H со ризик од 5% , односно со ниво на значајност од 95% се
донесува одлука дека се прифаќа алтернативната хипотеза 1H ; ако
tреализирана≥t(n-1;0,05) тогаш се отфрла нултата хипотеза 0H со ризик од 1%,
односно со ниво на значајност од 99% се прифаќа алтернативната хипотеза 1H .
Со зголемување на примерокот t-распределбата се приближува кон
стандардизираната нормална распределба N~(0,1), кај големите примероци ( n>30;
n1+n2>60 единки) ги прима сите особини на оваа распределба и t-вредноста се
однесува како z-вредност.
Кај големите примероци горните правила за прифаќање или одбивање на 0H
се упростуваат и не бараат примена на таблиците за Студентова t-распределба, туку
донесувањето на заклучок зависи од нивоата на дозволената гранична грешка.
3.6.2 ПРИКАЗ НА ИЗЛЕЗНИТЕ РЕЗУЛТАТИ
Приказот на излезните резултати најчесто се прави во:
- Табеларна форма (за нумеричките вредности)
- Линиски дијаграм или хистограм (за компарација).
Кога во процесот на калибрација се користат повеќе мерки за ефикасност,
соодветна е употреба на анализа со X – Y рамнина. Излезните резултати од различни
сценарија се претставуваат со различни бои, и 90 или 95 %-ната површина на
интервалот на доверливост се споредува со резултатите прибрани од терен.
Дијаграмите/хистограмите се практични, бидејќи повеќе параметри/мерки за
ефикасност може да се претстават во еден графички приказ.
На примерот кој следува се прикажани вредностите на зададените (сина
линија) и калибрираните параметри (црвена линија) како и мерките за ефикасност
прибрани од терен (црните стрелки и броеви).

49
Сл. 3.3: Пример за приказ на податоци со линиски дијаграм
Извор: Park, B., Won, J., MICROSCOPIC SIMULATION MODEL CALIBRATION AND VALIDATION HANDBOOK, Richmond, Virginiа, October 2006, pp. 50
3.6.3 ВИЗУЕЛНА ПРОВЕРКА НА МОДЕЛОТ
Иако се добиени прифатливи излезни резултати, можно е да се појават
нереални движења на возилата (Сл. 3.4).
Сл. 3.4: Пример за неприфатлив симулациски модел
Извор: PTV VISSIM 6.0
Може да се забележи дека возилата кои стојат на приодите не се правилно
застанати, туку се под агол. Проблеми можат да се јават и од типот - непочитување на

50
сигнализацијата, непочитување на првенството на минување, преплетување на
возилата итн.
На крај, калибрираниот и валидиран модел, може да се користи за натамошни
истражувања или за преземање на инженерски чекори на истражуваниот потег.
Прикажаната методологија ќе биде имплементирана за ЦГП во град Виница (Гл.
4).

51
4 ИМПЛЕМЕНТАЦИЈА НА МЕТОДОЛОГИЈАТА ЗА ЦЕНТРАЛНОТО ГРАДСКО
ПОДРАЧЈЕ (ЦГП) ВО ГРАД ВИНИЦА
4.1 Општи податоци за град Виница
Виница е мал град во источниот дел на Р. Македонија. Според пописот во
2002 год., градот има 10.863 жители.43 Градот претставува културен, административен,
образовен и стопански центар на општина Виница. Во близина на градот, на само 4 км
минува еден од најважните државни патишта во Р. Македонија – државниот пат A3 кој
претставува главна врска на градот со останатиот дел од државата и граничниот
премин Рамна Нива кон Р. Бугарија.
Сл. 4.1: Местоположба на Виница во РМ
Извор: http://mk.wikipedia.org/wiki/Виница
4.1.1 НАМЕНА НА ЗЕМЈИШТЕ ВО ГРАД ВИНИЦА
Град Виница во себе ги содржи сите елементи на општественото живеење,
поделени во три категории:
- Стопанство
- Домување
- Нестанбени содржини: образование, здравство, социјална заштита, култура,
административни и управни дејности, зеленило, спорт и рекреација, културно
историско наследство, комунални содржини.
43 www.stat.gov.mk

52
Во Таб.4.1 е прикажан билансот на изградени површини според класи на
намена на површината.
Таб. 4.1: Биланс на изградени површини
Класи на намени на површини Површина / ha %
А. Домување 106,76 21,42
Б. Комерцијални и деловни намени 2,20 0,44
В. Јавни институции 8,41 1,69
Г. Производство, дистрибуција и сервиси 60,62 12,16
Д. Зеленило и рекреација 14,01 2,81
Археолошки локалитет - КАЛЕ- 1 зона 16,27 3,26
Археолошки локалитет - 2 зона 5,68 1,14
СООБРАЌАЈНИЦИ 27,64 5,56
Реки 4,94 0,99
Канали за наводнување 1,91 0,38
ЈАВНИ ПАРКИРАЛИШТА 0,11 0,02
Плоштад 1,08 0,22
Гробишта 1,54 0,31
Неизградено земјиште 247,20 49,59
ВКУПНА ПОВРШИНА 491,45 100.00
Извор: ГУП - Виница, изменување и дополнување, 2008-2018
Околу 50 % од територијата на град Виница претставува неизградено земјиште.
Од вкупната површина, 5,56 % (27,64 ha) се сообраќајници, а само 0,02 % (0,11 ha) се
јавни паркиралишта.
4.1.2 СООБРАЌАЈ И СООБРАЌАЈНА ИНФРАСТРУКТУРА
Градот Виница, своите врски со другите делови на Република Македонија и
пошироко ги остварува преку државниот патен правец А344, Штип - Кочани - Делчево -
Република Бугарија, и преку Регионалниот патен правец Р130445, Превалец - Виница -
Смојмирово. Регионалниот пат Р1304 минува низ потесното централно градско
подрачје, низ улиците: „Илинденска”, „Браќа Миладиновци” и Булеварот „Маршал
Тито”.
44 Службен весник на РМ, бр. 150/2014, Исправка на одлуката за категоризација на државните патишта 45 Ibid.

53
На Сл. 4.2 е прикажана категоризацијата на сообраќајната мрежа за град
Виница.
Сл. 4.2: Сообраќајна мрежа на град Виница
Извор: Изработено од магистрантот
Сообраќајната мрежа во градот според своите карактеристики може да се
подели во два дела:
1. Новопроектирана мрежа оформена според соодветна современа урбанистичка
и проектна документација. Се одликува со ортогонална поставеност во
рамнинскиот дел на Виница. Во висински поразвиениот дел на градот се
уличната мрежа е условена од теренската конфигурација.
2. Наследена улична мрежа оформена во старото градско јадро со стари градски
улици и сокаци. На поголем дел од својата должина немаат доволна широчина,
но сепак ги задоволуваат потребите на граѓаните за моторизиран пристап до
парцелите изградени претежно со индивидуална станбена градба.
Бројот на регистрирани патнички моторни возила за Општина Виница во 2012
год. е прикажан во Таб.4.2.

54
Таб. 4.2: Регистрирани патни моторни и приклучни превозни средства во Виница –
2012 год.
Моторцикли ПА Бус ТВ Влечни
возила Трактори
Работни
возила
Приклучни
возила Вкупно
Р. М. 8473 301761 2719 26542 4219 1059 547 5442 350762
Виница 231 2908 11 232 63 62 10 96 3613
Извор: www.stat.gov.mk
Од вкупниот број на регистрирани возила во Р. Македонија, 1% се наоѓаат во
општина Виница. Општиот степен на моторизација (вкупен број на возила на 1000
жители) во општина Виница во 2012 година изнесува 185,1 возило/1000 жители,
односно, парцијалниот степен на моторизација (број на патнички возила на 1000
жители) за истата година изнесува 149 патнички возила/1000 жители. (Во пресметките,
бројот на жители за целата општина е земен според прогнозата на Заводот за
статистика за 31.12.2012 година – 19.526 жители46).
4.2 Креирање и развој на микросимулациски модел за град Виница
4.2.1 ДЕФИНИРАЊЕ НА ОБЕМ И ЦЕЛ НА ИСТРАЖУВАЊЕ
Во истражувањето се анализираат осум крстосници од потесното ЦГП на
Виница, делот од сообраќајна мрежа која е со најголемо оптоварување.
Цел на истражувањето е да предложи и оцени генерална методологија за
калибрација и валидација на сообраќаен микроскопски симулациски модел.
Валидноста на предложената методологија е изведена со примена на VISSIM.
4.2.2 ДЕФИНИРАЊЕ НА ПОДРАЧЈЕ НА ОПФАТ
Крстосниците, кои се анализираат, се лоцирани по должина на магистралната
улица (освен крстосницата „Маршал Тито“ – „Димитар Влахов“) (Сл. 4.3):
1. „Браќа Миладиновци“ – „Плачковички Одред“ (кај Автобуската станица)
(Крстосница 1)
46 Процени на населението на 30.06.2012 и 31.12.2012 според полот и возраста, по општини и по статистички региони (НТЕС 3 - 2007 година), pp. 44

55
2. „Браќа Миладиновци“ – „Тошо Арсов“ (Крстосница 2)
3. „Браќа Миладиновци“ – „Димитар Влахов“ (кај Градски парк) (Крстосница 3)
4. „Маршал Тито“ – „Димитар Влахов“ (Крстосница 4)
5. „Браќа Миладиновци“ – „Јакимовски пат“ (Крстосница 5)
6. „Браќа Миладиновци“ – „Маршал Тито“ – “Моша Пијаде“ (Крстосница 6)
7. Булевар „Маршал Тито“ – „Страшо Пинџур“ (Крстосница 7)
8. Булевар „Маршал Тито“ – „Партизанска“ (Крстосница 8).
Сл. 4.3: Подрачје на опфат
Извор: Google Maps (обработена од магистрантот)
4.2.3 ОДРЕДУВАЊЕ НА МЕРКИ ЗА ЕФИКАСНОСТ
Како мерки за ефикасност во истражувањето се дефинирани: времето и
брзината на патување на делница. Должината на редовите на возилата, временските
доцнења, бројот на застанувања и сл., мерки кои многу често се анализираат во
научните истражувања и во проектните анализи, не се земени предвид бидејќи
Виница е мал град со слаб интензитет на токови.
4.2.4 ПРИБИРАЊЕ НА ПОДАТОЦИ ОД ТЕРЕН
За потребите на истражувањето, извршено е снимање на сообраќајот на ден
15.10.2013 (вторник), од 6:00-8:00 ч. (утрински врвен час) и од 14:00-16:00 ч.
(попладневен врвен час). Во броењето на сообраќајот опфатени се : велосипеди,

56
моторцикли, патнички возила, лесни, средни и тешки товарни возила, автобуси,
трактори и запрежни возила (Прилог 1).
За снимањето е ангажиран по еден бројач за секоја крстосница. Податоците се
прибираат рачно и со камера (Сл.4.4). Со обработка на видео записите се одреди
времето на патување на најдолгата делница од Булевар „Маршал Тито“ - меѓу
крстосниците со ул. „Партизанска“ и ул. „Браќа Миладиновци“.
Сл. 4.4: Снимање на сообраќајот со камера
Извор: Изработено од магистрантот

57
Потребните податоци за геометриските карактеристики на секоја од
крстосниците се прибрани од: ажурирана катастарска подлога (ширина на коловоз,
растојание меѓу крстосници, агол меѓу приодите), посета на терен (број на ленти,
местоположба на пешачки премини, сигнален план, поставени сообраќајни знаци).
На Сл.4.5 се прикажани приодите, лентите и растојанијата меѓу крстосниците.
Сл. 4.5: Геометрија на истражуваниот потег
Извор: Изработено од магистрантот
Виница е мал град со релативно едноставна сообраќајна и слаба сообаќајна
оптоваредност. Во врвниот час се измерени вкупно 1091 возило за сите 8 крстосници.
Структурата на токовите, врз основа на обработените податоци, е прикажана на
Диј. 4.1.

58
Диј. 4.1: Процентуална застапеност на видовите возила
Извор: Изработено од магистрантот
Најзастапен вид се патничките автомобили (80%), следуваат моторциклите со
5%. Останатите видови возила се застапени во помал процент. Најмалку се застапени
автобусите (1%).
Конверзијата на хетерогениот ток во хомоген е извршена со вредностите на ПАЕ
прикажани во Таб.4.3.
Таб. 4.3: Вредности на ПАЕ за различни типови возила
ТИП НА ВОЗИЛО ПАЕ вредност
Велосипед 0,2
Моторцикл 0,4
Патничко возило 1
Автобус 2
Лесно товарно возило 1
Средно товарно возило 1,5
Тешко товарно возило 2,3
Извор: Smith, Ј., & Blewitt, R., TRAFFIC MODELLING GUIDELINES TFL TRAFFIC MANAGER AND NETWORK PERFORMANCE, Best Practice, Version 3.0, Transport for London, September 2010, pp 67
Оптовареноста на мрежата според приоди и насоки за врвен час, како и типот
на контрола е прикажана на Сл. 4.6. Сообраќајните слики за секоја крстосница се
прикажани во Прилог 2.

59
Сл. 4.6: Сообраќајни токови на истражуваниот потег
Извор: Изработено од магистрантот
Вкупната оптовареност на мрежата во врвен час изнесува 1 091 возила.
Најоптоварена е магистралната улица која минува низ градот (Браќа „Миладиновци“ –
Булевар „Маршал Тито“) со над 200 воз/час за секоја делница.
Емпириските мерења на времето и брзината на патување за најдолгата
(референтна) делница од Булевар „Маршал Тито“ – меѓу крстосниците со ул.
„Партизанска“ и ул. „Браќа Миладиновци“ се прикажани во Прилог 3. Соодветно за
секој тип на возило изнесуваат:
- за патнички возила 28,8 секунди и 41 km/h
- за товарни возила 33,6 секунди и 35 km/h, и
- за автобуси 39,5 секунди и 31 km/h.
Во Таб. 4.4 се прикажани минималните и максималните вредности на времето и
брзината на патување за типовите возила. Табелата е изработенa врз основа на
емпириските податоци прикажани во Прилог 4 .

60
Таб. 4.4: Гранични вредности на време и брзина на патување измерени од терен
Патнички возила
Време на патување
tp (s)
Min 19 s
Max 38 s
Брзина на патување
Vp (km/h)
Min 31 km/h
Max 62 km/h
Товарни возила
Време на патување
tp (s)
Min 23 s
Max 42 s
Брзина на патување
Vp (km/h)
Min 28 km/h
Max 51 km/h
Автобуси
Време на патување
tp (s)
Min 37 s
Max 42 s
Брзина на патување
Vp (km/h)
Min 28 km/h
Max 32 km/h
Извор: Изработено од магистрантот
4.2.5 КОДИРАЊЕ НА МРЕЖАТА
Проектирањето на мрежата се изврши на ажурирана катастарска подлога за
град Виница (Сл. 4.7).
Сл. 4.7: Подлога користена во VISSIM
Извор: Катастарско одделение на општина Виница (обработено од магистрантот)
1) Податоци за геометриски карактеристики
Во Таб. 4.5 се прикажани карактеристиките на секој приод од осумте третирани
крстосници користени при кодирање на мрежата во VISSIM.

61
Таб. 4.5: Геометриски карактеристики
Крстосница
бр. Приод
Број на
ленти
Ширина на
лента
Пешачки
премин
1
„Браќа Миладиновци“ Запад 2 (1+1)47 3.6 m
„Браќа Миладиновци“ Исток 2 (1+1) 3.6 m
„Плачковички Одред“ 2 (1+1) 3.5 m
2
„Браќа Миладиновци“ Запад 2 (1+1) 3.5 m
„Браќа Миладиновци“ Исток 2 (1+1) 3.5 m
„Тошо Арсов“ 2 (1+1) 2.75 m
„Кочо Рацин“ 2 (1+1) 2.5 m
3
„Браќа Миладиновци“ Запад 2 (1+1) 3.5 m
„Браќа Миладиновци“ Исток 2 (1+1) 3.5 m
„Димитар Влахов“ Север 2 (1+1) 3.0 m
„Димитар Влахов“ Југ 2 (1+1) 3.0 m
4
„Маршал Тито“ Запад 1 (влез) 4.5 m
„Маршал Тито“ Исток 1 (излез) 4.5 m
„Димитар Влахов“ Север 2 (1+1) 3.0 m
„Димитар Влахов“ Југ 2 (1+1) 3.0 m
5
„Браќа Миладиновци“ Запад 2 (1+1) 3.6 m
„Браќа Миладиновци“ Исток 2 (1+1) 3.8 m
„Јакимовски пат“ 2 (1+1) 3.0 m
6
„Браќа Миладиновци“ 3 (2+1) 3.3 m
„Маршал Тито“ 1 (влез) 4.5 m X
„Моша Пијаде“ 2 (1+1) 2.8 m
„Славчо Стојменски“ 2 (1+1) 3.1 m
Бул. „Маршал Тито“ 3 (2+1) 3.3 m
7
Бул. „Маршал Тито“ Запад 2 (влез) 3.1 m X
Бул. „Маршал Тито“ Исток 2 (излез) 3.1 m X
„Страшо Пинџур“ 2 (1+1) 3.3 m
8
Бул. „Маршал Тито“ Запад 4 (2+2) 3.1 m
Бул. „Маршал Тито“ Исток 4 (2+2) 3.3 m
„Славчо Стојменски“ 2 (1+1) 3.3 m
„Партизанска“ 2 (1+1) 3.2 m
Извор: Изработено од магистрантот
47 Првата цифра во заградата означува број на влезни ленти, а втората – број на излезни ленти

62
2) Тип на контрола
Во Таб. 4.6 прикажан е поставената сигнализација за анализираните
крстосници.
Таб. 4.6: Тип на сигнализација
Крстосница бр. Приод Поставена сигнализација
„Браќа Миладиновци“ Запад „Браќа Миладиновци“ Исток „Плачковички Одред“ „Браќа Миладиновци“ Запад „Браќа Миладиновци“ Исток „Тошо Арсов“ „Кочо Рацин“ „Браќа Миладиновци“ Запад „Браќа Миладиновци“ Исток „Димитар Влахов“ Север „Димитар Влахов“ Југ „Маршал Тито“ Запад „Маршал Тито“ Исток „Димитар Влахов“ Север „Димитар Влахов“ Југ „Браќа Миладиновци“ Запад „Браќа Миладиновци“ Исток „Јакимовски пат“ „Браќа Миладиновци“ „Маршал Тито“ „Моша Пијаде“ „Славчо Стојменски“ Бул. „Маршал Тито“ Бул. „Маршал Тито“ Запад Бул. „Маршал Тито“ Исток „Страшо Пинџур“ Бул. „Маршал Тито“ Запад Бул. „Маршал Тито“ Исток „Славчо Стојменски“ „Партизанска“
Извор: Изработено од магистрантот
63
Крстосницата 3 („Браќа Миладиновци“ – „Димитар Влахов“) е контролирана со
СС. Станува збор за временски фиксна контрола со две фазен систем на работа.
Должината на циклусот изнесува 60 секунди, времетраење на зелено светло за I фаза
(за токовите од ул. „Браќа Миладиновци“) – 41 секунда, за II фаза (за токовите од ул.
„Димитар Влахов“) – 15 секунди. Должината на црвено – жолтото и жолтото светло е 2
секунди. Зелените времиња за пешаците се совпаѓаат со истите за моторизираните
токови, односно 41 секунда за I фаза и 15 за II фаза.
Заради несоодветното проектирање на светлосната сигнализација (непостоење
на заштитни времиња како за моторизираните така и за пешачките токови) и
постојаните конфликти меѓу токовите кои резултираа со неколку сообраќајни незгоди
на семафоризираната крстосница, од почетокот на месец октомври 2014 година,
светлосната сигнализација е исклучена, а сообраќајот се контролира со поставената
вертикална сигнализација.
3) Сообраќајни операции и податоци за управување
Ограничувањето на брзината е поставено за 40 km/h согласно ограничувањето
за град Виница. При наидување на возилата пред крстосници и при свртување (во лево
или десно) поставени се зони со намалена брзина (Reduced speed areas) – со брзина од
20 km/h.
Прибирањето на податоците се извршува со креирање на јазли кои ја опфаќаат
целата мрежа, и ги сечат влезните делници во мрежата (Сл. 4.8).

64
Сл. 4.8: Поставеност на јазлите за прибирање на податоци
Извор: Изработено од магистрантот
Мерните места за прибирање на податоци за времето на патување за
референтната делница (меѓу крстосниците Булевар „Маршал Тито“ – „Партизанска“ и
„Маршал Тито“ – „Браќа Миладиновци“ – „Моша Пијаде“) се прикажани на Сл. 4.9.
Сл. 4.9: Локации за прибирање на податоци за време на патување
Извор: Изработено од магистрантот
4) Податоци за моторизирани токови
Токовите се поставуваат само на влезните делници на мрежата. Во оваа фаза се
дефинираат и процентуалното учество на видовите возила за секоја крстосница
одделно како и посакуваната брзина на движење (Сл. 4.10).

65
Сл. 4.10: Поставување на % учество на возила и посакувана брзина
Извор: PTV VISSIM 6.0
Се креираат и маршрутите на движење на возилата кои ги претставуваат
дозволените насоки на движење од секој приод и бројот на возила за секоја насока
соодветно (Сл. 4.11).
Сл. 4.11: Креирање на маршрути на движење и учество на возилата
Извор: PTV VISSIM 6.0
3) Податоци за пешачки токови
На крстосниците 1 (кај Автобуска станица) и 3 (кај Градски парк) на секој
пешачки премин се поставени - 50 пешаци/час за двете насоки на движење, заради
зголемениот интензитет на пешаци во тие делови на градот. На останатите пешачки
приоди се поставени - 25 пешаци/час според насока.
На краевите на секој пешачки премин се поставени пешачки зони, кои се
поврзани со двенасочни маршрути на движење.
На Сл. 4.12 е претставен е пример на проектирана крстосница во VISSIM.

66
Сл. 4.12: Изглед на проектирана крстосница во VISSIM
Извор: Изработено од магистрантот
6) Параметри за однесување на возачите
За сите типови на возила се избира посакувана дистрибуција на брзината на
движење од 40 km/h (во граници 40 – 45 km/h) соодветно со ограничувањето на
брзината во град Виница (Сл. 4.13).
Сл. 4.13: Посакувана брзина на возилата за некалибриран модел
Извор: PTV VISSIM 6.0
Реакцијата на возачите на жолт и црвено – жолт сигнал на СС е поставена
идентично како при зелен сигнал, односно да преминуваат преку крстосницата, што и
соодветствува со сообраќајната култура во Р. Македонија.

67
Останатите параметри за однесување на возачите остануваат непроменети.
7) Параметри за типовите возила
При креирањето на моделот, параметрите за типовите возила (забрзување,
забавување, максимална брзина, боја, итн.) остануваат стандардни (default).
Изгледот на проектираната мрежа е прикажан во Прилог 7.
4.3 Проверка на грешки во моделот
Два вида на проверки се направени за моделот во VISSIM. Првата проверка се
прави автоматски, со иницијализација на симулацијата. Во конкретниот случај, се
јавија грешки: неостварливо движење (нема конекција) меѓу два линка и
конфликтниот маркер е преблиску до конекторот. Овие грешки се коригирани.
Вториот вид на проверка претставува визуелна проверка на симулацијата. Во
случајов се утврди дека постои непочитување на приоритетот меѓу пешачките и
моторизираните токови, преплетување на токовите возила заради непоставени
правила за приоритет. Овие грешки се коригирани.
4.4 Почетна евалуација на моделот со зададени (default) параметри
Почетната евалуација е извршена со добивање на резултатите од
иницијализација на 10 - те симулации (Прилог 5).
Времето на патување измерено од терен за референтната делница (од Булевар
„Маршал Тито“) е прикажано во Таб.4.7 за патнички, товарни возила и автобуси.

68
Таб. 4.7: Време на патување на делница
Време на патување
од терен (секунди)
Време на патување
од модел (секунди)
Отстапување
(%)
Патнички возила 28,8 29,8 3,5 %
Товарни возила 33,6 30,4 9,5 %
Автобуси 39,5 30,5 22,8 %
Вкупно просечно
Време на патување 29,3 29,8 1,7 %
Извор: Изработено од магистрантот
Вкупното просечно време на патување на делницата, измерено од терен,
изнесува 29,3 секунди. Вкупното просечно време на патување од моделот изнесува
29,8 секунди. Отстапувањето изнесува само за 0,5 секунди (1,7 %). Оваа разлика е
незначителна. Разгледувано според тип на возило, времињата на патување се следни:
1. за патнички возила: 28,8 секунди од терен, наспроти 29,8 секунди од моделот.
Процентуално отстапување на вредностите - 3,5 %
2. за товарни возила: 33,6 секунди од терен, наспроти 30,4 од моделот.
Процентуално отстапување на вредностите - 9,5 %
3. за автобуси: 39,5 секунди од терен, наспроти 30,5 од моделот. Процентуално
отстапување на вредностите - 22,8 %.
Согласно дефинираната вредност за дозволено максимално отстапување од
10% на излезните параметри од моделот и емпириските (Гл.3), потребно е да се
изврши калибрација само на брзината на патување преку којашто се добива времето
на патување, за товарни возила и автобуси.
4.5 Почетна калибрација
4.5.1 ИДЕНТИФИКАЦИЈА НА ПАРАМЕТРИ ЗА КАЛИБРАЦИЈА
Врз основа на анализите од претходните искуства, можната листа за избор на
влезни параметри во VISSIM, кои се поврзани со ова истражување, во процесот на
калибрација и нивните граници е прикажана во Таб. 4.8.48 Конечниот избор на влезни
48 Otkovic, I., Tollazzi, T., Shraml, M., ANALYSIS OF THE INFLUENCE OF CAR-FOLLOWING INPUT PARAMETERS ON THE MODELLED TRAVELLING TIME, Technical Gazette 20, 5(2013), pp 921

69
параметри зависи пред сѐ од расположливоста со реални податоци. Во конкретниот
случај, влијание врз излезните резултати за времето на патување има посакуваната
брзина патување на возилата. Емпириски мерења за останатите параметри од Таб. 4.8,
не се извршени.
Таб. 4.8: Листа на влезни параметри за калибрација на моделот на VISSIM
Влезни параметри Стандардна вредност
Минимално растојание на прегледност во
однос на возилото кое што претходи (m) 0
Максимално растојание на прегледност во
однос на возилото кое што претходи (m) 250
Број на набљудувани возила 4
Минимално растојание на прегледност во
однос на возилото кое што следи (m) 0
Максимално растојание на прегледност во
однос на возилото кое што следи (m) 150
Просечно растојание при мирување на
возилата (m) 2.0
Дополнително безбедносно растојание (m) 2
Време на чекање пред дифузија (промена на
лента) (s) 60
Минимално растојание на следење (m) 0,5
Зони со намалена брзина (km/h) 20
Посакувано забрзување
(m/s2)
3,75 Патничко возило
2,50 Товарно возило
1,24 Автобус
Посакувано забавување
(m/s2)
-2,75 Патничко возило
-1,25 Товарно возило
-0,85 Автобус
Посакувана брзина (km/h) 40
Извор: PTV VISSIM 6.0
Калибрацијата на параметарот време на патување како мерка за ефикасност
може да се направи со нагодување на посакувана брзина на возилата (desired speed
distribution). Дијаграмите за посакуваната брзина за товарни возила и автобуси се
прикажани на Сл. 4.14.

70
Сл. 4.14: Посакувана брзината на возилата за калибриран модел
Извор: Изработено од магистрантот
Заради проверка, во оваа фаза применет е t–тестот за тестирање на значајноста
на разликите на средните вредности на времето на патување на избраната делница од
моделот и од терен за сите типови возила (Таб. 4.9). Највообичаено ниво кое се
користи за да се покаже дали нештото е доволно добро за да може да се верува во
него е 0,95 (95%).
Таб. 4.9: t–тест за време на патување на делница (фаза на почетна калибрација)
t - тест
Реализирана t- вредност Гранична - таблична t вредност
Патнички возила -3.29 1.96
Товарни возила -0.15 2.21
Автобуси -1.29 2.45
Вкупно -2.18 1.96
Извор: Изработено од магистрантот
96.129.3 )05.0,( tt ареализиран - за патнички возила
12.215.0 )05.0,16( tt ареализиран - за товарни возила
45.229.1 )05.0,6( tt ареализиран за автобуси
96.118,2 )05.0,( tt ареализиран вкупно
Коментар: реализираните апсолутни t вредности за патнички возила и вкупно се
поголеми од граничните таблични t вредности (за степен на слобода и ниво на
значајност од 95%)49. Оттука се заклучува дека не е исполнета нултата хипотеза:
49 Маневска, В., Вовед во теоријата на веројатност и математичка статистика, ТФБ, 2003

71
разликите меѓу аритметичките средини на времето на патување на делница од
терен и од моделот не се значајни. Оттука, во процесот на калибрација додатно се
вклучуваат и патничките возила, заради доминантното учество на ПВ (80 % - тно
учество на ПВ во токот).
4.5.2 ОДРЕДУВАЊЕ НА ПРИФАТЛИВИ ГРАНИЦИ НА ВРЕДНОСТИТЕ НА ПАРАМЕТРИТЕ
Со тестирање на различни варијанти и стартување на поголем број симулации,
добиени се вредности за брзината на поединечните типови возила (минимални и
максимални) (Сл. 4.15).
Сл. 4.15: Калибрирани вредности за брзина на возилата
Извор: Изработено од магистрантот
Кај патничките автомобили е направено мало поместување на границите со
зголемување на минималната вредност (43-45 km/h), бидејќи времето на патување во
VISSIM e поголемо отколку на терен.
Брзината на товарните возила е намалена, и дефинирана е во рамки 36-38
km/h, бидејќи времето на патување во VISSIM е значително помало отколку на терен
(Таб. 4.6). Со намалувањето на брзината, се зголемува времето на патување.

72
Брзината на автобусите е дефинирана на 32-34 km/h во однос на почетните 40 -
45 km/h. Тоа е така бидејќи времето на патување во софтверот е за 9 секунди помало
од истиот параметар измерен од терен.
4.5.3 ПОВЕЌЕКРАТНО СИМУЛИРАЊЕ
Во истражувањетп симулирањето е изведено 10 пати врз основа на инженерска
проценка, како и во консултација со странски трудови.50 Деталите за десетте
иницијализирани симулации од VISSIM се прикажани на Сл. 4.16.
Сл. 4.16: Повеќекратно симулирање во VISSIM
Извор: Изработено од магистрантот
4.6 Тест на изводливост
4.6.1 СПОРЕДБА НА СИМУЛАЦИСКИТЕ РЕЗУЛТАТИ СО РЕЗУЛТАТИТЕ ОД ТЕРЕН
Во Таб. 4.10 е прикажано времето на патување на делницата измерено од терен
и времето на патување од калибрираниот модел (Прилог 6).
50 Woody, T., CALIBRATING FREEWAY SIMULATION MODELS IN VISSIM, University of Washington, 2006

73
Таб. 4.10: Време на патување на делница во VISSIM
Време на патување
од терен
(секунди)
Време на патување од
калибриран модел
(секунди)
Отстапување
(%)
Патнички возила 28,8 29,1 1,0 %
Товарни возила 33,6 34,2 1,8 %
Автобуси 39,5 37,9 4,0 %
Просек 29,3 29,4 0,0 %
Извор: Изработено од магистрантот
Според Таб. 4.10, просечното време на патување за сите видови возила од
VISSIM и од терен се разликува за само 0,1 секунда.
Вредностите на времето на патување за патничките возила се разликуваат за
само 0,3 секунди (1 %), за товарните возила – 0,6 (1,8 %), а за автобусите – 1.6 секунди
(4,0 %). Ова е показател дека е постигнато високо ниво на доверливост на моделот за
симулација.
4.7 Валидација на моделот
4.7.1 ПРИМЕНА НА СТАТИСТИЧКИ ТЕСТ
1) Примена на GEH тест
Врз основа на условите за примена на GEH тестот, дефинирани во Гл.3, се
оценува дека во ова истражување нема оправданост од негова примена.
2) Примена на t–тест
Во ова истражување t–тестот е применет за тестирање на значајноста на
разликите на средните вредности на времето на патување на избраната делница од
моделот и од терен за сите типови возила.
Нулта хипотеза ( 0H ): Разликите меѓу аритметичките средини на времето на
патување на делница од терен и од моделот не се значајни.

74
Времето на патување ќе биде тестирано со ниво на значајност од 95%, односно
со ризик од 5%.
Резултатите од применетиот t-тест се прикажани во Таб. 4.11.
Таб. 4.11: t–тест за време на патување на делница
ПОДАТОЦИ ОД ТЕРЕН КАЛИБРИРАН МОДЕЛ t - тест t-
таблична
вредност
Број
на
возила
Време на
патување
(Секунди)
Стандардно
отстапување
Број
на
возила
Време на
патување
(Секунди)
Стандардно
отстапување
Стандардно
отстапување
Реализирана
t- вредност
Патнички
возила 200 28.8 4.3 223 29.1 0.1 0.30 -0.99 1,96
Товарни
возила 11 33.6 6.7 7 34.2 1.2 2.07 -0.29 2,12
Автобуси 4 39.5 2.1 4 37.9 0.9 1.14 1.40 2,45
Вкупно 215 29.3 4.7 234 29.4 0.2 0.32 -0.31 1,96
Извор: Изработено од магистрантот
Од табелата може да се забележи дека:
96.199.0 )05.0,( tt ареализиран - за патнички возила
12.229.0 )05.0,16( tt ареализиран - за товарни возила
45.240.1 )05.0,6( tt ареализиран - за автобуси
96.132.0 )05.0,( tt ареализиран - вкупно
Бидејќи апсолутната вредност на реализираните вредности за t-променливите
за сите типови возила се помали од граничните таблични вредности со 95 % ниво на
значајност, се прифаќа нултата хипотеза 0H . Заклучуваме со ризик од 5% дека
разликите меѓу моделот и состојбата од терен не се значајни и дека моделот реално ја
отсликува ситуацијата од терен.
4.7.2 ПРИКАЗ НА ИЗЛЕЗНИТЕ РЕЗУЛТАТИ
Излезните резултати за времето на патување измерени од терен, од основниот
модел и калибрираниот симулациски модел се прикажани на Диј. 4.2.

75
Диј. 4.2: Компарација на времето на патување
Извор: Изработено од магистрантот
Може да се забележи дека вредностите на времето на патување од терен и од
калибрираниот модел се речиси идентични. Со ова се потврдува валидноста на
калибрираниот модел во однос на времето на патување.
На Диј. 4.3 е прикажано просечното време на патување од терен, основниот и
калибрираниот модел.
Диј. 4.3: Компарација на вкупно просечно време на патување
Извор: Изработено од магистрантот

76
На Диј.4.4 прикажана е брзината на патување од терен, основен модел и
калибриран модел.
Диј. 4.4: Компарација на брзина на патување
Извор: Изработено од магистрантот
Следува компарација на просечната брзина на патување (Диј. 4.5).
Диј. 4.5: Компарација на вкупна просечна брзина на патување
Извор: Изработено од магистрантот

77
4.7.3 ВИЗУЕЛНА ПРОВЕРКА НА МОДЕЛОТ
После извршената калибрација и валидација на микросимулацискиот модел за
град Виница, извршена е визуелна проверка на моделот. Притоа, посебно внимание се
посвети на:
- Приоритетите на пешачките и моторизираните токови
- Почитувањето / непочитувањето на светлосната сигнализација
- Преплетувањето на токовите
- Правилното движење и застанување на возилата (преплетување на токови,
поставеност на возилата на стоп линијата).
Визуелната проверка покажа правилни приоритети меѓу токовите, правилно
движење како и почитување на СС.
На Сл. 4.17 прикажан е извадок од симулираната мрежа – сигнализирана
крстосница. Во Прилог 8 се прикажани графичките прилози од визуелната проверка.
Сл. 4.17: Визуелна проверка на моделот
Извор: Изработено од магистрантот

78
Моделот може да се користи за проектирање на идејни решенија, нови мерки
за управување и контрола на сообраќајот и останати инженерски чекори со цел
унапредување на сообраќајната инфраструктура во градот.
4.8 Дискусија на излезните резултати
Добиените резултати за времето на патување на референтната делница од
некалибрираниот симулациски модел значително се разликуваа во однос на
емпириските мерења.
Најмала беше разликата во времето на патување за патничките возила – 1
секунда (отстапување од 3,5%), а најголема за автобусите – 9 секунди (отстапување од
22,8%). Разликата во времето на патување за товарни возила изнесуваше - 3,2 секунди
(отстапување од 9,5%). Дефинираната вредност за дозволено максимално отстапување
на излезните резултати од моделот и од емпириските мерења изнесува 10% (Гл.3).
Оттука, се заклучи дека калибрирање е потребно да се изврши само на брзината на
патување преку којашто се добива времето на патување, за товарни возила и автобуси.
Но, во фазата на идентификација на параметри за калибрација, заради проверка,
применет е t–тестот за тестирање на значајноста на разликите на средните вредности
на времето на патување на избраната делница од моделот и од терен за сите типови
возила. Истиот покажа потреба од вклучување и на патничките возила (како причина
за тоа е доминантното учество на ПВ 80 % - но учество во токот).
Калибрација на параметарот време на патување се постигна со нагодување на
посакуваната брзина на патување на возилата. Од почетните 40 km/h за сите возила
(во граници 40-45 km/h), брзината на возилата беше дефинирана на: патнички возила –
43-45 km/h, товарни возила – 36-38 km/h и автобуси – 32-34 km/h.
Со нагодување на брзината, соодветно за сите типови на возила, добиени се и
нови вредности за времето на патување од моделот и тоа: за патнички возила – 29,1
секунда, за товарни возила – 34,2 секунди и за автобуси – 37,9 секунди. На тој начин,
разликите меѓу емпириските мерења и излезните резултати од калибрираниот модел
изнесуваат 1% за патнички автомобили, 1,8% за товарни возила и 4% за автобуси.
Освен компарација на излезните резултати применет е и t–тестот за тестирање
на значајноста на разликите на средните вредности на времето на патување на

79
избраната делница од моделот и од терен. Заклучено е со ризик од 5% дека разликите
меѓу моделот и состојбата од терен не се значајни и дека моделот реално ја отсликува
ситуацијата од терен.
Од резултатите кои произлегоа од применетата методологија за калибрација и
валидација може да се заклучи дека развиениот микроскопски модел за ЦГП на град
Виница е калибриран, веродостоен и подготвен е за негова натамошна употреба во
сообраќајни анализи, воведување на нови контролни мерки и идејни решенија за
унапредување на условите на одвивање на сообраќајот во Виница.

80
5 ЗАКЛУЧОЦИ
Примената на напредните софтверски алатки во сообраќајно – транспортното
инженерство ја унапредуваат и олеснуваат работата на сообраќајните инженери и
транспортните планери при анализа, оцена и развој на идејни решенија за
подобрување на сообраќајните услови. Нивната сѐ поголема примена повлекува едно
многу важно прашање, на кое сите како малку да подзабораваат, колку точно
симулацискиот модел ја отсликува реалноста?
Земјите со понапредна научноистражувачка дејност од областа на
микросимулациите и сообраќајното моделирање, посветуваат големо внимание на
постапката на калибрација и валидација на моделите. Најчесто истражувањата во
литературата се однесуваат на (1) генералните потреби на процедурата за
калибрирање на моделите, или (2) на деталниот опис на калибрацијата на моделите со
главен акцент на големи градски сообраќајни мрежи и при услови на сообраќајно
задушување.
Во Р. Македонија досега не е развиена процедура за калибрација и валидација
на микроскопски симулациски модел без разлика на величината на мрежата. Оттука,
во ова истражување за прв пат е развиена процедура за калибрација и валидација на
микроскопски симулациски модел во VISSIM за мал град. Предложената процедура е
применета на студија на случај на мрежа од осум крстосници во централното градско
подрачје (ЦГП) на град Виница. Станува збор за мал град со релативно едноставна
сообраќајна и слаба сообраќајна оптовареност (во врвен час се измерени вкупно 1 091
возило за анализираните 8 крстосници).
Согласно дефинираната вредност за дозволено максимално отстапување од
10% на излезните параметри од моделот и емпириските мерења, потребно беше да се
изврши калибрација само на брзината на патување преку којашто се добива времето
на патување за товарни возила и автобуси. Калибрацијата на времето на патување се
постигна со нагодување на посакуваната брзина на патување на возилата. Од
почетните 40 km/h за сите возила (во граници 40-45 km/h), брзината на возилата беше
дефинирана на: патнички возила – 43-45 km/h, товарни возила – 36-38 km/h и автобуси
– 32-34 km/h.

81
Со нагодување на брзината соодветно за сите типови на возила, добиени се и
нови вредности за времето на патување од моделот: патнички возила – 29,1 секунда,
товарни возила – 34,2 секунди и автобуси – 37,9 секунди, со што разликите меѓу
емпириските мерења и излезните резултати од калибрираниот модел изнесуваат 1%
за патнички автомобили, 1,8% за товарни возила и 4% за автобуси.
Освен компарација на излезните резултати применет е и t–тестот за тестирање
на значајноста на разликите на средните вредности на времето на патување на
избраната делница од моделот и од терен за сите типови возила. Се заклучи со ризик
од 5% дека разликите меѓу моделот и емпириските мерења не се значајни и дека
моделот реално ја отсликува ситуацијата од терен.
Предностите од изведената калибрација на моделот се:
- Добивање на модел којшто реално ги претставува условите од терен
- Се намалува можноста за добивање на нереални излезни резултати
- Моделот добива на квалитет, и
- Врз истиот можат да се развиваат и анализираат идејни решенија, без страв
дека нивната имплементација на терен ќе резултира со поразителни резултати.
Освен предностите, постапката на калибрација има и свои недостатоци:
- Дополнително време и средства за изработка на моделот, и
- При промена на геометриските карактеристики и/или средствата за управување
и контрола на сообраќајот, потребно е повторна калибрација на моделот.
Сепак, недостатоците се незначителни во споредба со предностите.
Со ова истражување се поставија основите за калибрација и валидација на
микроскопски симулациски модели за мали градови во Р. Македонија. Се отворија
нови насоки за продолжување на истражувањата, и тоа за: градови со поголем број на
жители, комплексна сообраќајна мрежа, интензивни сообраќајни оптоварувања.
Истражувањата треба да продолжат во насока на проширување на параметрите кои ќе
се мерат од терен, како на пр.: временските доцнења, должината на редот,
големината на заситениот ток, однесувањето на возачите, итн.

82
ЛИТЕРАТУРА
1. Chu L., Liu H., Oh J., Recker W., A CALIBRATION PROCEDURE FOR MICROSCOPIC TRAFFIC
SIMULATION. 83rd Annual Meeting CD-ROM, Transportation Research Board,
Washington, D.C., 2004.
2. Cohen, S. L., AN APPROACH TO CALIBRATION AND VALIDATION OF TRAFFIC
SIMULATION MODELS. Presented at 83rd Annual Meeting of the Transportation
Research Board, Washington, D.C., 2004.
3. DESIGN MANUAL FOR ROADS AND BRIDGES, Volume 12, Section 2, May 1996.
4. Dowling, R., Skabardonis, A., Halkias, J., Hale, G., Zammit, G., GUIDELINES FOR
CALIBRATION OF MICROSIMULATION MODELS: FRAMEWORK AND APPLICATIONS.
Presented at 83rd Annual Meeting of the Transportation Research Board, Washington,
D.C., 2004.
5. Duong, D., Saccomanno, F., Hellinga, B., CALIBRATION OF TRAFFIC MODEL FOR
SIMULATING SAFETY PERFORMANCE, In 89th Annual Meeting Preprint CD-ROM,
Transportation Research Board of the National Academies, Washington, 404 D.C., 2010.
6. Federal Highway Administration, Analysis Toolbox Volume III. GUIDELINES FOR
MICROSIMULATION MODELING. FHWA Publication Number FHWA-HRT-04-040, 2004.
7. Fellendorf, M., Vortisch, P., Microscopic TRAFFIC FLOW SIMULATOR VISSIM,
Fundamentals of Traffic Simulation Vol. 145, 2010.
8. Fellendorf, M., Vortisch P., VALIDATION OF THE MICROSCOPIC TRAFFIC FLOW MODEL
VISSIM IN DIFFERENT REAL-380 WORLD SITUATIONS. In 80th Annual Meeting Preprint
CD-ROM, Transportation Research Board of the National 381 Academies, Washington,
D.C., 2001.
9. FHWA, Traffic Analysis Toolbox Volume III: GUIDELINES FOR APPLYING TRAFFIC
MICROSIMULATION SOFTWARE. Washington, Јuly, 2004.
10. Hellinga, B. R., REQUIREMENT FOR THE CALIBRATION OF TRAFFIC SIMULATION
MODELS. Department of Civil Engineering, University of Waterloo, Ontario, Canada,
1998.
11. Hourdakis J., Michalopoulos P., Kottommannil J., A PRACTICAL PROCEDURE FOR
CALIBRATION MICROSCOPIC TRAFFIC SIMULATION MODELS. 82nd Annual Meeting CD-
ROM, Transportation Research Board, Washington D.C., 2003.

83
12. Kim, K., Rilet, L., SIMPLEX BASED CALIBRATION OF TRAFFIC MICROSIMULATION MODELS
USING ITS DATA. 82nd Annual Meeting CD-ROM, Transportation Research Board,
Washington, D.C., 2003.
13. Koltovska, D., Bombol, K., Ilievski, D., CALIBRATION AND VALIDATION PROCEDURE OF
MICROSCOPIC TRAFFIC SIMULATION MODEL: A CASE STUDY, International Conference
on Traffic and Transport Engineering (ICTTE) Belgrade 2014.
14. Lownes, N. E., Machemehl, R. B., VISSIM: A MULTI-PARAMATER SENSITIVITY ANALYSIS.
Proceedings of the 38th Winter Simulation Conference, 2006.
15. Mathew, T. V., Radhakrishnan, P., CALIBRATION OF MICROSIMULATION MODELS FOR
NONLANE-BASED HETEROGENEOUS TRAFFIC AT SIGNALIZED INTERSECTIONS. Journal of
Urban Planning and Development, ASCE, Vol. 136, No.1, 2010.
16. Menneni, S., Sun, C., Vortisch, P., MICROSIMULATION CALIBRATION USING SPEED FLOW
RELATIONSHIPS. In 87th Annual Meeting Preprint CD-ROM, Transportation Research
Board of the National Academies, Washington, D.C., 2008.
17. Milam, R. T., RECOMMENDED GUIDELINES FOR THE CALIBRATION AND VALIDATION OF
TRAFFIC SIMULATION MODELS. Fehr & Peers Associates, Inc., 2002.
18. Miller, M. D., DEVELOPING A PROCEDURE TO IDENTIFY PARAMETERS FOR CALIBRATION
OF A VISSIM MODEL. Georgia, May 2009.
19. Ministry of Works and Transport, Roads Department, TRAFFIC DATA COLLECTION AND
ANALYSIS. Gaborone, Botswana, February 2004.
20. Otkovic, I., Tollazzi, T., Shraml, M., ANALYSIS OF THE INFLUENCE OF CAR-FOLLOWING
INPUT PARAMETERS ON THE MODELLED TRAVELLING TIME. Technical Gazette 20,
5(2013).
21. Park, B., Jongsun, W., Ilsoo, Y., APPLICATION OF MICROSCOPIC SIMULATION MODEL
CALIBRATION AND VALIDATION PROCEDURE: A CASE STUDY OF COORDINATED
ACTUATED SIGNAL SYSTEM. In Transportation Research Record: Journal of the
Transportation Research Board, No. 1978, Transportation Research Board of the
NationalAcademies, Washington, D.C., 2006.
22. Park, B., Schneeberger, J., MICROSCOPIC SIMULATION MODEL CALIBRATION AND
VALIDATION: A CASE STUDY OF VISSIM FOR A COORDINATED ACTUATED SIGNAL
SYSTEM. Transportation Research Record: Journal of the Transportation Research

84
Board, No. 1856, Transportation Research Board of the National Academies,
Washington, D.C., 2003
23. Park, B., Schneeberger, J., MICROSCOPIC MODEL CALIBRATION AND VALIDATION: A
CASE STUDY OF VISSIM FOR A COORDINATED-ACTUATED SYSTEM. 81st Annual Meeting
CD-ROM, Transportation Research Board, Washington, D.C., 2002
24. Park, B., Won, J., MICROSCOPIC SIMULATION MODEL CALIBRATION AND VALIDATION
HANDBOOK. October 2006, Richmond, Virginia
25. Park B., Qi, H., DEVELOPMENT AND EVALUATION OF A CALIBRATION AND VALIDATION
PROCEDURE FOR MICROSIMULATION, Virginia Transportation Research Council. Report
VTRC 05-CR1, August, 2004.
26. Park, B., Qi, H., DEVELOPMENT AND EVALUATION OF A PROCEDURE FOR THE
CALIBRATION OF SIMULATION MODELS. In Transportation Research Record: Journal of
the Transportation Research Board, No. 1934, Transportation Research Board of the
NationalAcademies, Washington, D.C., 2005.
27. PTV AG, VISSIM User Manual, Karlsruhe Germany, April 2011.
28. Sacks, J., Rouphail, N., Park, B., Thakuriah, P., STATISTICALLY BASED VALIDATION OF
COMPUTER SIMULATION MODELS IN TRAFFIC OPERATIONS AND MAN- PARK AND QI
217 AGEMENT. Journal of Transportation and Statistics, Vol. 5, No. 1, 2002.
29. Sacks J., Rouphail N., Park, B, and Thakuriah P., STATISTICALLY-BASED VALIDATION OF
COMPUTER SIMULATION MODELS IN TRAFFIC OPERATIONS AND MANAGEMENT.
Journal of Transportation Statistics, Volume 5, No. 1, 2002.
30. Smith, Ј., Blewitt, R., TRAFFIC MODELLING GUIDELINES TFL TRAFFIC MANAGER AND
NETWORK PERFORMANCE, Best Practice, Version 3.0. Transport for London, September
2010.
31. Woody, T., CALIBRATING FREEWAY SIMULATION MODELS IN VISSIM. University of
Washington, 2006.
32. Zhang, Y., Owen, E. L., SYSTEMATIC VALIDATION OF A MICROSCOPIC TRAFFIC
SIMULATION PROGRAM. Presented at 83rd Annual Meeting of the Transportation
Research Board, Washington, D.C., 2004.
33. Zhizhou W., Juan S., Xiaoguang Y., CALIBRATION OF VISSIM FOR SHANGHAI
EXPRESSWAY USING GENETIC ALGORITHM. Proceedings of the 2005 Winter Simulation
Conference, 2005.

85
34. Бомбол, К., ОСНОВИ НА СООБРАЌАЈНО ИНЖЕНЕРСТВО, интерни предавања, ТФБ,
Битола, 2009.
35. ГУП за град Виница, изменување и дополнување, плански период пред и 2008 -
2018 год.
36. Катастарска подлога со размер 1:1000, Одделение за катастар при Општина
Виница
37. Маневска, В., ВОВЕД ВО ТЕОРИЈАТА НА ВЕРОЈАТНОСТ И МАТЕМАТИЧКА
СТАТИСТИКА, интерни предавања, ТФБ, 2003.
38. Службен весник на РМ, бр. 150/2014, Исправка на одлуката за категоризација на
државните патишта
Интернет адреси
1. https://en.wikipedia.org/wiki/PTV_VISSIM
2. http://publish.uwo.ca/~jmalczew/gida_5/Pursula/Pursula.html
3. http://labmanual.net/docs/FTP/files/LaboratoryValidationDefinitionsAndTerminology
4. http://ftp.odot.state.or.us/Region1_Projects/I-205%20Reconnaissance/I-205
5. VISSIM/VISSIM%20Calibration%20report.pdf
6. http://filebox.vt.edu/users/hrakha/Publications/VVC3.pdf
7. http://www.thefreedictionary.com/validation
8. http://en.wikipedia.org/wiki/GEH_statistic
9. http://mk.wikipedia.org/wiki/Виница
10. www.stat.gov.mk
11. www.maps.google.com

86
ПРИЛОЗИ

87
Прилог 1: Образец за прибирање податоци за токови на возила

88
Прилог 2: Сообраќајни слики
Крстосница ул. „Браќа Миладиновци“ – ул. „Плачковички Одред“
Крстосница ул. „Браќа Миладиновци“ – ул. „Тошо Арсов“

89
Крстосница ул. „Браќа Миладиновци“ – ул. „Димитар Влахов“
Крстосница ул. „Маршал Тито“ – ул.„Димитар Влахов“

90
Крстосница ул. „Браќа Миладиновци“ – ул. „Јакимовски пат“
Крстосница ул. „Маршал Тито“ – ул. „Браќа Миладиновци“ – ул.„Моша Пијаде“

91
Крстосница Булевар „Маршал Тито“ – ул. „Страшо Пинџур“
Крстосница Булевар „Маршал Тито“ – ул. „Партизанска“

92
Прилог 3: Време и брзина на патување на делница – емпириски мерења
Брзина на патување (km/h) Време на патување (s)
П.А. Т.В. БУС Просечно П.А. Т.В. БУС Просечно
41,2 35,3 30,1 40,5 28,8 33,6 39,5 29,3
Прилог 4: Време и брзина на патување на делница по возила – емпириски мерења
Патнички возила
Возило tp (s) Vp (km/h)
1 25 47.5
2 29 41.0
3 28 42.4
4 26 45.7
5 30 39.6
6 33 36.0
7 28 42.4
8 29 41.0
9 32 37.1
10 34 34.9
11 31 38.3
12 33 36.0
13 35 33.9
14 28 42.4
15 36 33.0
16 34 34.9
17 19 62.5
18 27 44.0
19 29 41.0
20 27 44.0
21 31 38.3
22 37 32.1
23 33 36.0
24 34 34.9
25 23 51.7
26 34 34.9
27 29 41.0
28 23 51.7
29 23 51.7
30 24 49.5
31 33 36.0
32 31 38.3

93
33 26 45.7
34 24 49.5
35 28 42.4
36 31 38.3
37 32 37.1
38 34 34.9
39 20 59.4
40 33 36.0
41 22 54.0
42 31 38.3
43 33 36.0
44 29 41.0
45 36 33.0
46 32 37.1
47 21 56.6
48 24 49.5
49 22 54.0
50 23 51.7
51 27 44.0
52 29 41.0
53 22 54.0
54 30 39.6
55 23 51.7
56 24 49.5
57 25 47.5
58 22 54.0
59 26 45.7
60 24 49.5
61 31 38.3
62 32 37.1
63 28 42.4
64 23 51.7
65 25 47.5
66 27 44.0
67 30 39.6
68 26 45.7
69 33 36.0
70 32 37.1
71 37 32.1
72 30 39.6
73 31 38.3
74 25 47.5

94
75 36 33.0
76 29 41.0
77 25 47.5
78 26 45.7
79 29 41.0
80 31 38.3
81 33 36.0
82 26 45.7
83 32 37.1
84 29 41.0
85 24 49.5
86 20 59.4
87 28 42.4
88 34 34.9
89 30 39.6
90 31 38.3
91 32 37.1
92 23 51.7
93 27 44.0
94 25 47.5
95 25 47.5
96 24 49.5
97 24 49.5
98 25 47.5
99 33 36.0
100 24 49.5
101 29 41.0
102 23 51.7
103 32 37.1
104 33 36.0
105 24 49.5
106 20 59.4
107 27 44.0
108 30 39.6
109 29 41.0
110 26 45.7
111 29 41.0
112 27 44.0
113 28 42.4
114 26 45.7
115 22 54.0
116 25 47.5

95
117 26 45.7
118 33 36.0
119 34 34.9
120 35 33.9
121 27 44.0
122 24 49.5
123 29 41.0
124 28 42.4
125 32 37.1
126 31 38.3
127 31 38.3
128 33 36.0
129 32 37.1
130 35 33.9
131 35 33.9
132 24 49.5
133 25 47.5
134 30 39.6
135 37 32.1
136 29 41.0
137 27 44.0
138 33 36.0
139 31 38.3
140 32 37.1
141 25 47.5
142 27 44.0
143 35 33.9
144 33 36.0
145 35 33.9
146 32 37.1
147 32 37.1
148 29 41.0
149 27 44.0
150 31 38.3
151 38 31.3
152 30 39.6
153 32 37.1
154 31 38.3
155 25 47.5
156 34 34.9
157 35 33.9
158 27 44.0

96
159 21 56.6
160 36 33.0
161 23 51.7
162 28 42.4
163 33 36.0
164 31 38.3
165 34 34.9
166 33 36.0
167 29 41.0
168 34 34.9
169 32 37.1
170 22 54.0
171 32 37.1
172 27 44.0
173 35 33.9
174 29 41.0
175 27 44.0
176 32 37.1
177 33 36.0
178 30 39.6
179 27 44.0
180 26 45.7
181 27 44.0
182 24 49.5
183 26 45.7
184 30 39.6
185 26 45.7
186 24 49.5
187 33 36.0
188 22 54.0
189 29 41.0
190 24 49.5
191 34 34.9
192 23 51.7
193 24 49.5
194 33 36.0
195 29 41.0
196 26 45.7
197 31 38.3
198 22 54.0
199 31 38.3
200 38 31.3

97
Товарни возила
Возило tp (s) Vp (km/h)
1 36 33.0
2 23 51.7
3 42 28.3
4 24 49.5
5 37 32.1
6 35 33.9
7 25 47.5
8 34 34.9
9 39 30.5
10 41 29.0
11 34 34.9
Автобуси
Возило tp (s) Vp (km/h)
1 42 28.3
2 40 29.7
3 37 32.1
4 39 30.5

98
Прилог 5: Време на патување од некалибриран модел
Бр. на
симулација
Временски
интервал
Број на возила Време на патување на
делница
Вкупно П.А. Т.В. БУС Просек П.А. Т.В. БУС
1 300-3600 148 138 4 6 29.7 29.6 31.6 29.6
2 300-3600 150 142 3 5 29.8 29.8 28.5 30.4
3 300-3600 149 142 2 5 29.7 29.7 33.2 29.9
4 300-3600 135 126 7 2 30.4 30.3 30.6 32.3
5 300-3600 129 123 2 4 29.3 29.3 28.3 29.4
6 300-3600 140 135 2 3 29.7 29.7 31.3 29.4
7 300-3600 133 129 2 2 29.6 29.6 29.2 29.5
8 300-3600 152 143 5 4 30.1 30.0 30.3 33.5
9 300-3600 141 133 5 3 29.8 29.7 32.3 31.1
10 300-3600 122 119 1 2 30.3 30.3 28.9 29.9
Просек 300-3600 140 133 3 4 29.8 29.8 30.4 30.5
Стандардно
отстапување 300-3600 10 9 2 1 0.3 0.3 1.7 1.4
Минимум 300-3600 122 119 1 2 29.3 29.3 28.3 29.4
Максимум 300-3600 152 143 7 6 30.4 30.3 33.2 33.5

99
Прилог 6: Време на патување од калибриран модел
Бр. на
симулација
Временски
интервал
Број на возила Време на патување на
делница
Вкупно П.А. Т.В. БУС Просек П.А. Т.В. БУС
1 300-3600 250 233 10 7 29.6 29.2 35.3 37.1
2 300-3600 240 232 5 3 29.3 29.1 34.2 37.8
3 300-3600 237 230 6 1 29.3 29.1 34.3 38.6
4 300-3600 242 228 8 6 29.7 29.3 34.3 39.7
5 300-3600 226 214 7 5 29.2 28.9 33.0 37.0
6 300-3600 223 213 6 4 29.4 29.0 36.8 37.7
7 300-3600 238 227 8 3 29.4 29.1 34.0 37.3
8 300-3600 218 207 7 4 29.4 29.0 33.6 38.2
9 300-3600 218 206 8 4 29.3 29.0 33.6 36.9
10 300-3600 252 240 6 6 29.3 29.0 32.8 38.5
Просек 300-3600 234 223 7 4 29.4 29.1 34.2 37.9
Стандардно
отстапување 300-3600 12 12 1 2 0.2 0.1 1.2 0.9
Минимум 300-3600 218 206 5 1 29.2 28.9 32.8 36.9
Максимум 300-3600 252 240 10 7 29.7 29.3 36.8 39.7

100
Прилог 7: Изглед на проектирани крстосници во VISSIM
Проектирана мрежа на ЦГП на град Виница во VISSIM
Крстосница ул. „Браќа Миладиновци“ – ул. „Плачковички Одред“

101
Крстосница ул. „Браќа Миладиновци“ – ул. „Тошо Арсов“
Крстосница ул. „Браќа Миладиновци“ – ул. „Димитар Влахов“

102
Крстосница ул. „Маршал Тито“ – ул.„Димитар Влахов“
Крстосница ул. „Браќа Миладиновци“ – ул. „Јакимовски пат“

103
Крстосница ул. „Маршал Тито“ – ул. „Браќа Миладиновци“ – ул.„Моша Пијаде“
Крстосница Булевар „Маршал Тито“ – ул. „Страшо Пинџур“

104
Крстосница Булевар „Маршал Тито“ – ул. „Партизанска“

105
Прилог 8: 3D изглед на микросимулациски модел
Крстосница „Браќа Миладиновци“ – „Плачковички Одред“
Крстосница „Браќа Миладиновци“ – „Тошо Арсов“

106
Крстосница „Браќа Миладиновци“ – „Димитар Влахов“
Крстосница „Маршал Тито“ – „Димитар Влахов“

107
Крстосница „Браќа Миладиновци“ – „Јакимовски пат“
Крстосница „Маршал Тито“ – „Браќа Миладиновци“ – „Моша Пијаде“

108
Крстосница Булевар „Маршал Тито“ – „Страшо Пинџур“
Крстосница Булевар „Маршал Тито“ – „Партизанска“

109
Поглед на мрежата од Исток
Поглед на мрежата од Запад
Copyright © 2022 FDOKUMEN