Rational maps, monopoles and skyrmions
35
arXiv:hep-th/9705151v2 18 Nov 1997 UKC/IMS/97-25, DAMTP 97-48, NI 97026-NQF, hep-th/9705151 Rational Maps, Monopoles and Skyrmions Conor J. Houghton † , Nicholas S. Manton † and Paul M. Sutcliffe ‡ † Department of Applied Mathematics and Theoretical Physics University of Cambridge, Silver St., Cambridge CB3 9EW, England. Email [email protected] Email [email protected] ‡ Institute of Mathematics, University of Kent at Canterbury, Canterbury CT2 7NF, England. Email P.M.Sutcliff[email protected] November 1997 Abstract We discuss the similarities between BPS monopoles and Skyrmions, and point to an underlying connection in terms of rational maps between Riemann spheres. This involves the introduction of a new ansatz for Skyrme fields. We use this to construct good approximations to several known Skyrmions, including all the minimal energy configurations up to baryon number nine, and some new solutions such as a baryon number seventeen Skyrme field with the truncated icosahedron structure of a buckyball. The new approach is also used to understand the low-lying vibrational modes of Skyrmions, which are required for quantization. Along the way we discover an interesting Morse function on the space of rational maps which may be of use in understanding the Sen forms on the monopole moduli spaces. PACS: 02.30.Dk; 14.80.Hv; 12.39.Dc; 21.60.-n Keywords: Rational maps; BPS monopoles; Skyrmions; Nuclear-structure model 1
Transcript of Rational maps, monopoles and skyrmions

arX
iv:h
ep-t
h/97
0515
1v2
18
Nov
199
7
UKC/IMS/97-25, DAMTP 97-48, NI 97026-NQF, hep-th/9705151
Rational Maps, Monopoles and Skyrmions
Conor J. Houghton†, Nicholas S. Manton† and Paul M. Sutcliffe‡
† Department of Applied Mathematics and Theoretical Physics
University of Cambridge, Silver St., Cambridge CB3 9EW, England.
Email [email protected]
Email [email protected]
‡ Institute of Mathematics, University of Kent at Canterbury,
Canterbury CT2 7NF, England.
Email [email protected]
November 1997
Abstract
We discuss the similarities between BPS monopoles and Skyrmions, and point
to an underlying connection in terms of rational maps between Riemann spheres.
This involves the introduction of a new ansatz for Skyrme fields. We use this to
construct good approximations to several known Skyrmions, including all the minimal
energy configurations up to baryon number nine, and some new solutions such as a
baryon number seventeen Skyrme field with the truncated icosahedron structure of
a buckyball.
The new approach is also used to understand the low-lying vibrational modes
of Skyrmions, which are required for quantization. Along the way we discover an
interesting Morse function on the space of rational maps which may be of use in
understanding the Sen forms on the monopole moduli spaces.
PACS: 02.30.Dk; 14.80.Hv; 12.39.Dc; 21.60.-n
Keywords: Rational maps; BPS monopoles; Skyrmions; Nuclear-structure model
1

1 Introduction
There is considerable evidence that there is rather a close connection between SU(2) BPSmonopoles and Skyrmions, despite their obvious differences.
Recall that BPS monopoles are minimal energy classical solutions in a Yang-Mills-Higgstheory. They satisfy the Bogomolny equation
Bi = DiΦ (1.1)
where Bi is the magnetic part of the SU(2) Yang-Mills field tensor, and DiΦ is the covariantderivative of an adjoint Higgs field. There is a (4N −1)-dimensional moduli space of gaugeinequivalent solutions with monopole number N , all with the same energy 4πN . Amongthese solutions are some special ones of rather high symmetry, representing N coalescedsingle monopoles.
The Skyrme model is a nonlinear theory of pions, with an SU(2) valued scalar fieldU(x, t), the Skyrme field, satisfying the boundary condition U → 1 as |x| → ∞. Staticfields obey the equation
∂i(Ri −1
4[Rj , [Rj, Ri]]) = 0 (1.2)
where Ri is the su(2) valued current Ri = (∂iU)U−1. Such fields are stationary points(either minima or saddle points) of the energy function
E =∫−1
2Tr(RiRi) −
1
16Tr([Ri, Rj][Ri, Rj ]) d3x. (1.3)
Associated with a Skyrme field is a topological integer, the baryon number B, definedas the degree of the map U : IR3 7→ SU(2). This is calculated at a given time, but is timeindependent. It is well defined because of the boundary condition at infinity.
Solutions of the Skyrme equation (1.2) are known for several values of B, but they canonly be obtained numerically. Many of these solutions are stable, and probably representthe global minimum of the energy for given B. We shall refer to the solutions believed tobe of lowest energy for each B as Skyrmions. Some saddle-point solutions are also known.
All known solutions appear to be isolated and their only moduli are the obvious onesassociated with the large symmetry group of the equation and boundary condition. Thissymmetry group is nine-dimensional. It consists of translations and rotations in IR
3 andthe SO(3) isospin transformations U 7→ OUO−1 where O is a constant element of SU(2).Generic solutions therefore have nine moduli, although solutions with axial or sphericalsymmetry have fewer.
It has been found that many solutions of the Skyrme equation, and particularly thoseof low energy, look rather like monopoles, with the baryon number B being identifiedwith the monopole number N. The fields are not really the same, but the energy densityhas equivalent symmetries and approximately the same spatial distribution. The historyof the discovery of these solutions is perhaps worth recalling. First Skyrme [1] foundthe spherically symmetric B = 1 Skyrmion. Later Prasad & Sommerfield [2] found the
2

analytic form of the N = 1 monopole, which is also spherically symmetric. Bogomolny[3] then showed that minimal energy monopoles should satisfy (1.1), and that the Prasad-Sommerfield solution is the unique spherically symmetric solution of (1.1). Next, and withdifficulty, an axially symmetric N = 2 monopole was discovered by Ward [4], and after thatit was found that the B = 2 Skyrmion is axially symmetric [5, 6, 7]. (There are sphericallysymmetric solutions of (1.2) for all B, but for B > 1 they have rather high energy.)
Next, a substantial numerical search for Skyrmion solutions was undertaken by Braatenet al. [8], and minimal energy solutions up to B = 6 were constructed. (Their solutionfor B = 6 was rather inaccurate, and its symmetry was wrongly identified.) Surprisingly,the B = 3 solution has tetrahedral symmetry Td, and the B = 4 solution has octahedralsymmetry Oh. The B = 5 (and B = 6) solutions have lower symmetry. These findingssuggested that monopoles with similar symmetries might exist, and indeed they do.
Hitchin et al. [9] established the existence of an N = 3 monopole with tetrahedralsymmetry and an N = 4 monopole with octahedral symmetry. These solutions are unique,up to the action of the Euclidean group. All other BPS monopole solutions with thesemonopole numbers (other than the axially symmetric configurations) have lower symmetry.Hitchin et al. also showed that no monopoles with icosahedral symmetry are possible withN ≤ 6 (although it appeared at first that one with N = 6 might be possible). Subsequently,Houghton & Sutcliffe [10] found an N = 5 monopole with octahedral symmetry, and anN = 7 monopole with icosahedral symmetry.
The search was on for further solutions of the Skyrme equation. There is a B = 5solution with octahedral symmetry, but it has slightly higher energy than the minimalenergy solution [11]. More importantly, Battye & Sutcliffe [12] established that the B =7 Skyrmion has icosahedral symmetry. Battye & Sutcliffe [12] have recently found allSkyrmions up to B = 9. The B = 6 and B = 8 solutions have the relatively low symmetriesD4d and D6d respectively, but the B = 9 solution has tetrahedral symmetry. The results inthis paper imply that monopoles with these symmetries, for N = 6, 8 and 9 respectively,exist too, but little is known about them.
Pictures of all these Skyrmion solutions can be found in ref. [12]. Qualitatively, theyare like the pictures in Fig. 1, whose significance we will explain later.
As we mentioned earlier, Skyrmion solutions are isolated, but it is physically interest-ing to study the small oscillation vibrations around them. The vibrational modes of theaxisymmetric B = 2 Skyrmion and the octahedrally symmetric B = 4 Skyrmion haverecently been studied by Barnes et al. [13, 14]. The frequencies and degeneracies of thesemodes have been calculated, and the way the Skyrmion vibrates can be visualized. Atleast for these two examples, the lowest frequency modes can clearly be identified with thedeformations of the moduli of the corresponding symmetric monopole. For example, forthe octahedrally symmetric N = 4 monopole there are fifteen moduli in all, but six of theseare associated with the Euclidean group. The nine remaining moduli can be identified withthe nine lowest frequency vibrational modes of the B = 4 Skyrmion.
How can we understand all these results? The aim of this paper is to point to anexplanation in terms of rational maps. A rational map is a holomorphic function fromS2 7→ S2. If we treat each S2 as a Riemann sphere, the first having coordinate z, a rational
3

map of degree N is a function R : S2 7→ S2 where
R(z) =p(z)
q(z)(1.4)
and p and q are polynomials of degree at most N . At least one of p and q must have degreeprecisely N , and p and q must have no common factors (ie. no common roots).
Rational maps were introduced into the theory of monopoles by Donaldson [15]. IndeedDonaldson showed that there is a one-to-one correspondence between maps of degree N(with the basing condition R(z) → 0 as z → ∞) and N -monopoles. Donaldson’s work,following Hitchin [16, 17], relies on a choice of direction in IR
3, and this is not helpful inthe present context.
A new relationship between monopoles and rational maps has recently been establishedby Jarvis [18] (following a suggestion of Atiyah). This requires the choice of an origin, andis much better adapted for studying fields invariant under a subgroup of the group ofrotations about the origin. The Jarvis map is obtained by considering Hitchin’s equation
(Dr − iΦ)s = 0 (1.5)
along each radial line from the origin to infinity. Here Dr is the covariant derivativein the radial direction and Φ is the Higgs field. s is an auxiliary complex doublet fieldtransforming via the fundamental representation of the gauge group SU(2). Because Φis asymptotically conjugate to diag( i
2,− i
2), equation (1.5) has, up to a constant multiple,
just one solution which decays asymptotically as r → ∞. Let(
s1(r)s2(r)
)be this solution and
(s1(0)s2(0)
)its value at the origin. Because of the arbitrariness of the constant multiple, it is
only the ratio R = s1(0)/s2(0) that is interesting. Now a particular radial line is labelledby its direction, regarded as a point z on the Riemann sphere. R depends holomorphicallyon the direction z, so we write R(z). The reason R is holomorphic is that the complexcovariant derivative in the angular direction, Dz, commutes with the operator Dr − iΦ,because of the Bogomolny equation (1.1). It can be shown that the degree of R is equalto the monopole number N , and hence R is rational of degree N . There is one remainingambiguity in R(z). If we carry out a gauge transformation then R(z) is replaced by itsMobius transformation by an SU(2) matrix
R(z) 7→ αR(z) + β
−βR(z) + α(1.6)
with |α|2+|β|2 = 1. The SU(2) matrix here,(
α β−β α
), is the gauge transformation matrix
evaluated at the origin, and it acts globally on R(z), that is, the same matrix occurs forall z.
Thus the moduli space of rational maps R(z) that Jarvis associates with N -monopolesis the complete (4N +2)-dimensional space of unbased rational maps of degree N . For each
4

monopole there is a map which is uniquely defined up to an SU(2) Mobius transformation.Moreover, each rational map arises from some monopole. Jarvis shows how, in principle,one may directly reconstruct the monopole from the rational map. This algorithm could beimplemented numerically, and currently work is in progress to achieve this. Note that thisconstruction still requires the solution of a partial differential equation in three-dimensionalspace so the computational gain is small. However, its advantage over a direct numericalsolution of the Bogomolny equation is that the selection of a given monopole solution canbe made precise via the rational map input, which is easy to obtain. This contrasts withan existing numerical construction [19], where the computational gain is great, since onlyordinary differential equations need to be solved, but where the input is more difficultto obtain since it consists of Nahm data which can only be found after the solution of anonlinear system of matrix differential equations.
The naturalness of the Jarvis construction means that a monopole invariant under asubgroup G of the spatial rotation group SO(3) will have an associated map R(z) whichis G-invariant (up to Mobius transformations), and conversely, if we find a G-invariantmap of a given degree N then there is an N -monopole with symmetry G. If we find thecomplete set of rational maps invariant under G, then the corresponding set of G-invariantmonopoles will form a geodesic submanifold of the monopole moduli space. In particular,if, for some G, the set of maps is one-dimensional, then the corresponding monopoles lieon a geodesic in the moduli space. Using the geodesic approximation to monopole motion[20], we obtain, usually, an example of monopole scattering with G-invariance.
An important quantity associated with a rational map R(z) = p(z)/q(z) is the Wron-skian
W (z) = p′(z)q(z) − q′(z)p(z) (1.7)
or more precisely, the zeros of W , which are the branch points of the map. If R is of degreeN , then generically, W is a polynomial of degree 2N − 2. The zeros of W are invariantunder any Mobius transformation of R, which replaces p by αp + βq and q by γq + δp andhence simply multiplies W by (αγ − βδ). Occasionally, W is a polynomial of degree lessthan 2N −2, but one then interprets the missing zeros as being at z = ∞. The symmetriesof the map R, and hence of the N -monopole which corresponds to it, are captured by thesymmetries of the Wronskian W . Sometimes W has more symmetry than the rational mapR, and we shall see examples of this.
Monopoles with given symmetries have been constructed before, for example, the N = 7monopole with icosahedral symmetry Yh. But the construction depended on a careful studyof Nahm’s equation, and the existence of the solution was not known in advance. The Nahmequation approach has only been successfully applied in relatively simple cases. It is mucheasier to classify rational maps with given symmetries, and we shall give a number ofexamples later. This establishes the existence of monopoles with these symmetries, but wehave not constructed all the solutions, even numerically!
5

2 Skyrme Fields from Rational Maps
The understanding of monopoles in terms of rational maps suggests that one might under-stand a range of Skyrmion solutions using rational maps. Rational maps are maps fromS2 7→ S2, whereas Skyrmions are maps from IR
3 7→ S3. A rather naive idea, which wefind works quite well, is to identify the domain S2 with concentric spheres in IR
3, and thetarget S2 with spheres of latitude on S3. This leads to a new ansatz for Skyrme fields.
It is convenient to use Cartesian notation to present the ansatz. Recall that via stereo-graphic projection, the complex coordinate z on a sphere can be identified with conventionalpolar coordinates by z = tan(θ/2)eiϕ. Equivalently, the point z corresponds to the unitvector
nz =1
1 + |z|2 (2ℜ(z), 2ℑ(z), 1 − |z|2). (2.1)
Similarly the value of the rational map R(z) is associated with the unit vector
nR =1
1 + |R|2 (2ℜ(R), 2ℑ(R), 1 − |R|2). (2.2)
Let us denote a point in IR3 by its coordinates (r, z) where r is the radial distance from
the origin and z specifies the direction from the origin. Our ansatz for the Skyrme fielddepends on a rational map R(z) and a radial profile function f(r). The ansatz is
U(r, z) = exp(if(r) nR · σ) (2.3)
where σ = (σ1, σ2, σ3) denotes the Pauli matrices. For this to be well-defined at the origin,f(0) = kπ, for some integer k. The boundary value U = 1 at r = ∞ requires that f(∞) = 0.It is straightforward to verify that the baryon number of this field is B = Nk, where N isthe degree of R. In the remainder of this paper we shall only consider the case k = 1, andthen B = N. Note that an SU(2) Mobius transformation on the target S2 of the rationalmap corresponds to a rotation of nR, and hence to an isospin rotation of the Skyrme field.
In the case N = 1, the basic map is R(z) = z, and (2.3) reduces to Skyrme’s hedgehogfield
U(r, θ, ϕ) = cos f + i sin f(sin θ cos ϕ σ1 + sin θ sin ϕ σ2 + cos θ σ3). (2.4)
The simplest case beyond this, with N = 2, is R = z2, which gives an ansatz ratherdifferent from that tried in ref. [21] for the B = 2 Skyrmion. We shall return to this casein more detail in Section 3.
An attractive feature of the ansatz (2.3) is that it leads to a simple energy expressionwhich can be minimized with respect to the rational map R and the profile function fto obtain close approximations to several known Skyrmion solutions. Starting with theseapproximations is an efficient method to find new exact solutions, although we shall notpursue this application here. To calculate the energy of a field of the form (2.3) we exploitan interpretation of the Skyrme energy function given in ref. [22].
As in nonlinear elasticity theory, the energy density of a Skyrme field depends on thelocal stretching associated with the map U : IR
3 7→ S3. The Riemannian geometry of IR3
6

(flat) and of S3 (a unit radius 3-sphere) are necessary to define this stretching. Considerthe strain tensor at a point in IR
3
Dij = −1
2Tr(RiRj) = −1
2Tr((∂iUU−1)(∂jUU−1)). (2.5)
This is symmetric, and positive semi-definite as Ri is antihermitian. Let its eigenvalues beλ2
1, λ22 and λ2
3. The Skyrme energy can be reexpressed as
E =∫
(λ21 + λ2
2 + λ23 + λ2
1λ22 + λ2
2λ23 + λ2
1λ23) d3x, (2.6)
and the baryon density as λ1λ2λ3/2π2. For the ansatz (2.3), the strain in the radialdirection is orthogonal to the strain in the angular directions. Moreover, because R(z) isconformal, the angular strains are isotropic. If we identify λ2
1 with the radial strain and λ22
and λ23 with the angular strains, we can easily compute that
λ1 = −f ′(r), λ2 = λ3 =sin f
r
1 + |z|21 + |R|2
∣∣∣∣dR
dz
∣∣∣∣. (2.7)
Therefore the energy is
E =∫ [
f ′2 + 2(f ′2 + 1)sin2 f
r2
(1 + |z|21 + |R|2
∣∣∣∣dR
dz
∣∣∣∣)2
(2.8)
+sin4 f
r4
(1 + |z|21 + |R|2
∣∣∣∣dR
dz
∣∣∣∣)4]2i dzdzr2dr
(1 + |z|2)2,
where 2i dzdz/(1 + |z|2)2 is equivalent to the usual area element on a 2-sphere sin θdθdϕ.Now the part of the integrand
(1 + |z|21 + |R|2
∣∣∣∣dR
dz
∣∣∣∣)2 2i dzdz
(1 + |z|2)2(2.9)
is precisely the pull-back of the area form 2i dRdR/(1 + |R|2)2 on the target sphere ofthe rational map R; therefore its integral is 4π times the degree N of R. So the energysimplifies to
E = 4π∫ (
r2f ′2 + 2N(f ′2 + 1) sin2 f + I sin4 f
r2
)dr (2.10)
where I denotes the integral
I =1
4π
∫ (1 + |z|21 + |R|2
∣∣∣∣dR
dz
∣∣∣∣)4 2i dzdz
(1 + |z|2)2. (2.11)
I depends only on the rational map R, and, as we explain in Section 5, it is an interestingfunction on the space of rational maps.
To minimize E, for maps of a given degree N , one should first minimize I over allmaps of degree N . Then, the profile function f minimizing the energy (2.10) may be
7

found by solving a second order differential equation with N and I as parameters. Inpractice, we have considered rational maps of a given symmetric form, with symmetriescorresponding to a known Skyrmion solution (or monopole). If these maps still containa few free parameters, we have minimized I with respect to these (using an appropriatesearch algorithm). Then, the minimizing profile function f is determined by first bijectivelymapping the radial coordinate r onto the unit interval, and then discretizing the energyfunctional using symmetric finite differences and finally obtaining the minimizing gridvalues by applying a conjugate gradient algorithm. This procedure seems appropriate forall baryon numbers up to B = 9, where the Skyrmion solutions all have considerablesymmetry, but for some higher values of B one will have to consider quite general maps asthe Skyrmions probably have very little symmetry.
Detailed examples of rational maps with various degrees and symmetries will be de-scribed in the next Section, and we shall compare the result of minimizing E for thesemaps with the energies of the numerically determined exact Skyrmion solutions.
Note the following pair of inequalities associated with the expression (2.10) for theenergy E. The elementary inequality
( ∫1 dS
)( ∫ (1 + |z|21 + |R|2
∣∣∣∣dR
dz
∣∣∣∣)4
dS)≥( ∫ (
1 + |z|21 + |R|2
∣∣∣∣dR
dz
∣∣∣∣)2
dS)2
, (2.12)
where dS = 2i dzdz/(1+|z|2)2, implies that I ≥ N2. Next, by a Bogomolny-type argument,we see that
E = 4π∫ (
(rf ′ +√I sin2 f
r)2 + 2N(f ′ + 1)2 sin2 f − 2(2N +
√I)f ′ sin2 f
)dr (2.13)
so
E ≥ 4π(2N +√I)∫
∞
0(−2f ′ sin2 f) dr = 4π(2N +
√I)[− f +
1
2sin 2f
]∞
0(2.14)
and so, if f(0) = π and f(∞) = 0,
E ≥ 4π2(2N +√I). (2.15)
Combined with the earlier inequality for I, we recover the usual Fadeev-Bogomolny boundE ≥ 12π2N. The bound (2.15) is stronger than this, for fields of the form we are considering,but there is no reason to think that true solutions of the Skyrme equation are constrainedby this bound.
We conclude this Section by observing that the zeros of the Wronskian W (z) of arational map R(z) give interesting information about the shape of the Skyrme field whichis constructed from R using our ansatz (2.3). Where W is zero, the derivative dR/dz is zero,so the strain eigenvalues in the angular directions, λ2 and λ3, vanish. The baryon density,being proportional to λ1λ2λ3, vanishes along the entire radial line in the direction specifiedby any zero of W . The energy density will also be low along such a radial line, since there
8
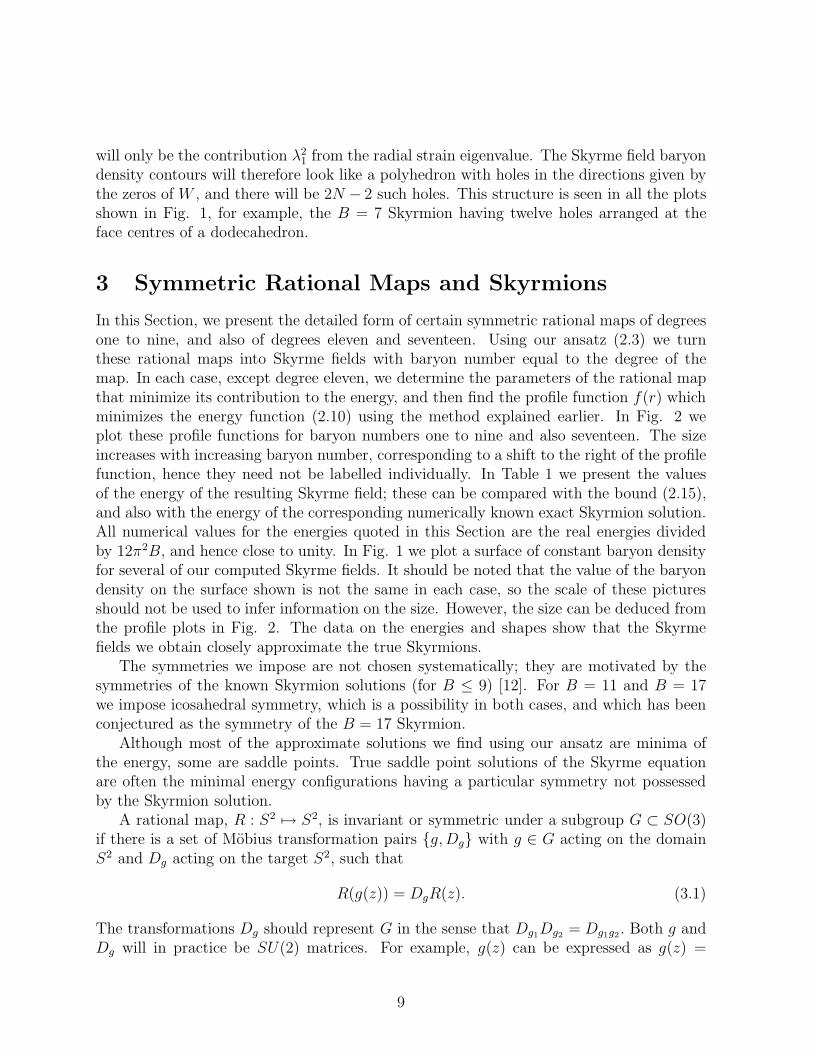
will only be the contribution λ21 from the radial strain eigenvalue. The Skyrme field baryon
density contours will therefore look like a polyhedron with holes in the directions given bythe zeros of W , and there will be 2N − 2 such holes. This structure is seen in all the plotsshown in Fig. 1, for example, the B = 7 Skyrmion having twelve holes arranged at theface centres of a dodecahedron.
3 Symmetric Rational Maps and Skyrmions
In this Section, we present the detailed form of certain symmetric rational maps of degreesone to nine, and also of degrees eleven and seventeen. Using our ansatz (2.3) we turnthese rational maps into Skyrme fields with baryon number equal to the degree of themap. In each case, except degree eleven, we determine the parameters of the rational mapthat minimize its contribution to the energy, and then find the profile function f(r) whichminimizes the energy function (2.10) using the method explained earlier. In Fig. 2 weplot these profile functions for baryon numbers one to nine and also seventeen. The sizeincreases with increasing baryon number, corresponding to a shift to the right of the profilefunction, hence they need not be labelled individually. In Table 1 we present the valuesof the energy of the resulting Skyrme field; these can be compared with the bound (2.15),and also with the energy of the corresponding numerically known exact Skyrmion solution.All numerical values for the energies quoted in this Section are the real energies dividedby 12π2B, and hence close to unity. In Fig. 1 we plot a surface of constant baryon densityfor several of our computed Skyrme fields. It should be noted that the value of the baryondensity on the surface shown is not the same in each case, so the scale of these picturesshould not be used to infer information on the size. However, the size can be deduced fromthe profile plots in Fig. 2. The data on the energies and shapes show that the Skyrmefields we obtain closely approximate the true Skyrmions.
The symmetries we impose are not chosen systematically; they are motivated by thesymmetries of the known Skyrmion solutions (for B ≤ 9) [12]. For B = 11 and B = 17we impose icosahedral symmetry, which is a possibility in both cases, and which has beenconjectured as the symmetry of the B = 17 Skyrmion.
Although most of the approximate solutions we find using our ansatz are minima ofthe energy, some are saddle points. True saddle point solutions of the Skyrme equationare often the minimal energy configurations having a particular symmetry not possessedby the Skyrmion solution.
A rational map, R : S2 7→ S2, is invariant or symmetric under a subgroup G ⊂ SO(3)if there is a set of Mobius transformation pairs g, Dg with g ∈ G acting on the domainS2 and Dg acting on the target S2, such that
R(g(z)) = DgR(z). (3.1)
The transformations Dg should represent G in the sense that Dg1Dg2
= Dg1g2. Both g and
Dg will in practice be SU(2) matrices. For example, g(z) can be expressed as g(z) =
9

(αz + β)/(−βz + α) with |α|2 + |β|2 = 1. Replacing (α, β) by (−α,−β) has no effect, so gis effectively in SO(3). The same is true for Dg.
Some of our rational maps possess an additional reflection or inversion symmetry. Thetransformation z 7→ z is a reflection, whereas z 7→ −1/z is the antipodal map on S2, orinversion. We shall deal with reflection and inversion on a case by case basis.
The detailed form of our maps will depend on choices of the orientation of axes, bothin the domain S2 and target S2. Our choice is made to simplify our maps as far as possible,but equivalent maps, differently oriented, are sometimes advantageous.
It is helpful to identify the Cartesian axes with certain directions specified by values ofz. The formula (2.1) for a unit vector associated with z implies that the positive x3-axisis in the direction z = 0, the positive x1-axis corresponds to z = 1 and the positive x2-axiscorresponds to z = i.
N = 1
The hedgehog map is R(z) = z. It is fully O(3) invariant, since R(g(z)) = g(z) for anyg ∈ SU(2) and R(−1/z) = −1/R(z). It gives the standard exact hedgehog Skyrmion so-lution with the usual profile f(r), and with energy E = 1.232. The map R(z) = z is alsothe Jarvis rational map of a monopole centred at the origin.
N = 2
A general degree two map is of the form
R(z) =αz2 + βz + γ
λz2 + µz + ν. (3.2)
Let us impose the two ZZ2 symmetries z 7→ −z and z 7→ 1/z which generate the viergruppeof 180 rotations about all three Cartesian axes. The conditions
R(−z) = R(z) and R(1/z) = 1/R(z) (3.3)
restrict R to the form
R(z) =z2 − a
−az2 + 1. (3.4)
By a target space Mobius transformation, we can bring a to lie in the interval −1 ≤ a ≤ 1,with the map degenerating at the endpoints. Further, a 90 rotation, z 7→ iz, reverses thesign of a. The maps (3.4) have three reflection symmetries in the Cartesian axes, whichare manifest when a is real. For example, R(z) = R(z) when a is real.
The Jarvis map of any centred and suitably oriented N = 2 monopole is of this form.When a = 0 the rational map has the additional symmetry R(eiχz) = e2iχR(z); it is theJarvis map of the axially symmetric N = 2 monopole. The maps (3.4), with −1 < a < 1,
10

parametrize a geodesic in the monopole moduli space, along which two monopoles scatterby 90 symmetrically from the x1-axis to the x2-axis. As a → ±1 the monopoles separateto infinity.
If we use the maps (3.4) in our ansatz for the Skyrme field, we find the integral Iincreases monotonically to infinity as a increases from 0 to 1. For a = 0, I = π + 8/3 andafter determining the profile f(r) in this case we obtain E = 1.208. So the Skyrme fieldbased on the map R(z) = z2 has the same symmetry as the B = 2 Skyrmion and energyjust 3% higher (see Table 1). A baryon density plot for this configuration is shown in Fig.1a.
One might consider imposing ZZ2×ZZ2 symmetry in other ways than (3.3) (eg. R(−z) =−R(z)) but this leads to maps which are equivalent but differently oriented.
N = 3
We recall that there is a unique tetrahedrally symmetric N = 3 monopole, and that theB = 3 Skyrmion has the same symmetry. There is also an axially symmetric, toroidalmonopole (as for all N > 1), and a saddle point solution of the Skyrme equations with thisshape.
A subset of the degree three rational maps which allows for both these solutions and asmooth interpolation between them is the subset with ZZ2 × ZZ2 symmetry, realized by therequirements
R(−z) = −R(z) and R(1/z) = 1/R(z). (3.5)
The first condition implies that the numerator of R is even in z and the denominator isodd, or vice versa. These two possibilities are related by an SU(2) Mobius transformation,so we choose the former and ignore the latter. Imposing the second condition as well givesus maps of the form
R(z) =
√3az2 − 1
z(z2 −√
3a)(3.6)
with a complex. The inclusion of the√
3 factor is a convenience. The parameter spaceof these maps should be thought of as a Riemann sphere with complex coordinate a. Therational map degenerates for three values of a, namely a = ∞, a = ±1/
√3.
There is a further reflection symmetry R(z) = R(z) if a is real. Together with therotational symmetries, this implies reflection symmetry in all three Cartesian axes. Aslightly subtler symmetry occurs if a is imaginary. The full symmetry group becomesD2d, where the extra generator is a rotation by 90 about the x3-axis combined with thereflection x3 7→ −x3. On the z-sphere the generator is z 7→ i/z, and R(i/z) = i/R(z) if ais imaginary.
Tetrahedral symmetry is obtained by imposing the further symmetry
R(
iz + 1
−iz + 1
)=
iR(z) + 1
−iR(z) + 1(3.7)
11

which is satisfied by (3.6) if a = ±i. Note that z 7→ (iz + 1)/(−iz + 1) sends 0 7→ 1 7→ i 7→ 0and hence generates the 120 rotation cyclically permuting the Cartesian axes.
Finally, there is axial symmetry about the x3-axis when a = 0, since then R(z) = −1/z3.There is also axial symmetry when a = ±
√3. These further solutions are related to the
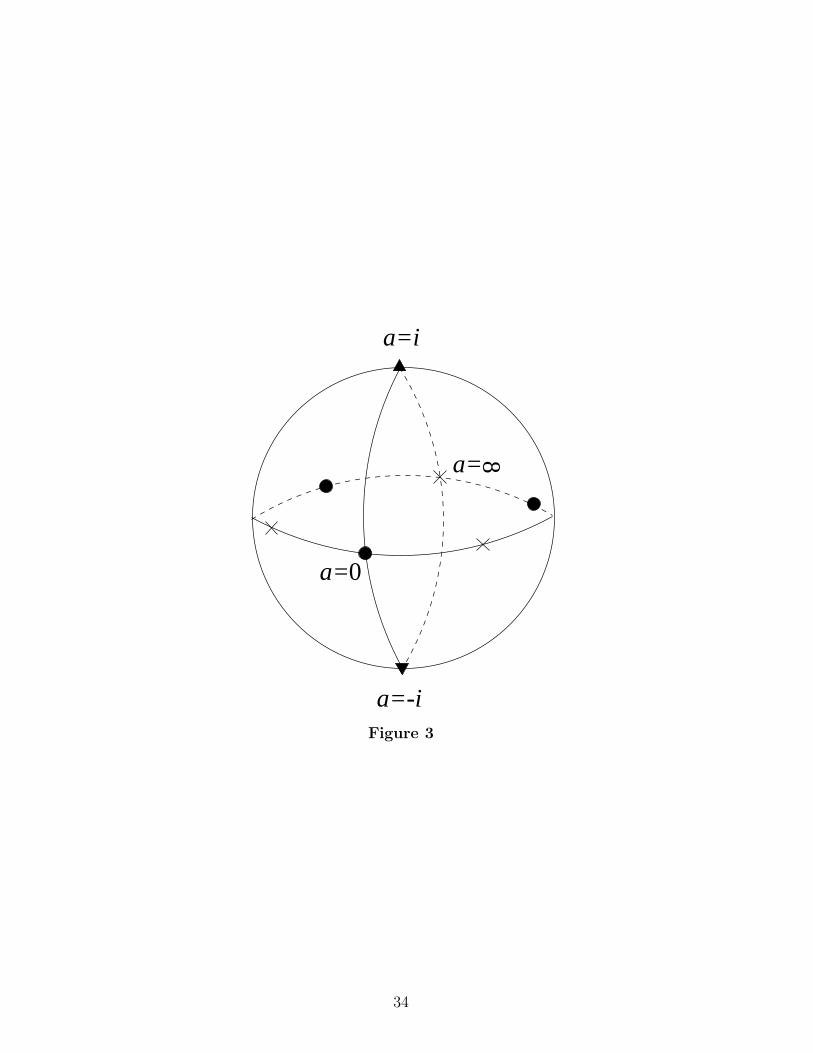
first by 120 rotations that take the x3-axis to the x1-axis and x2-axis.The a-sphere, with the special points we have discussed, is sketched in Fig. 3. The
Jarvis maps of the form (3.6) parametrize a geodesic submanifold of the N = 3 monopolemoduli space. One particular geodesic is the great circle segment −1/
√3 < a < 1/
√3. This
describes 90 scattering of monopoles, with two single monopoles scattering from the x1-axis to the x2-axis, the third monopole remaining at the origin. This type of geodesic waspreviously described by Bielawski [23] and Houghton & Sutcliffe [24]. A second geodesicis the great circle −∞ < ia < ∞, which passes through both tetrahedra and one of thetori. This is the twisted line scattering described in [25]. Dynamical simulations of theSkyrme equation have revealed that remarkably similar scattering processes also occur forSkyrmions [26, 11].
Using (3.6) in the rational map ansatz for Skyrme fields, we find that on the a-sphere,the angular integral I has just two types of stationary point. There are minima at thetetrahedral points ±i, where I = 13.58, and there are saddle points at the tori a = 0,±
√3,
where I = 18.67. I diverges as the degenerate points are approached. Using the tetrahedralmap and solving for the profile f(r), we find an approximation to the tetrahedral Skyrmionwith energy E = 1.184 (see Fig. 1b). Similarly, using the toroidal map and again solvingfor the profile f(r), we find an approximation to the toroidal saddle point solution of theSkyrme equations, with energy E = 1.256.
In addition to the tetrahedral and toroidal solutions of the Skyrme equation, there is apretzel, or figure eight shaped solution, discovered in an approximate form by Walet [27].This is a saddle point and slightly lower in energy than the torus. Its existence has beenconfirmed using a full field simulation and its energy computed to be E = 1.164 [11]. Onemight expect, based on symmetry, that this solution could be described approximatelywith our rational map ansatz. It would occur for a map of type (3.6), with a in the range0 < a < 1/
√3. However, no saddle point occurs in this range. So the pretzel solution
is not accessible with the rational map ansatz, and this appears to be because it is aconfiguration of three Skyrmions in a line, whereas the rational map ansatz appears towork best for shell-like structures, where all the baryon density is concentrated at roughlythe same distance from the origin.
It is interesting to look at the Wronskian of maps of the form (3.6). Recall thatW = p′q − q′p, where p and q are the numerator and denominator. Calculating, we find
W (z) = −√
3a(z4 +√
3(a − a−1)z2 + 1). (3.8)
Note that for a = ±i, W is proportional to a tetrahedral Klein polynomial [28]. If a = 1,W has square symmetry, but the rational map does not have as much symmetry as this.
12

N = 4
The minimal energy B = 4 Skyrmion has octahedral symmetry, and there is a uniqueoctahedrally symmetric N = 4 monopole. The octahedrally symmetric rational map ofdegree four can be embedded in a one parameter family of tetrahedrally symmetric maps
R(z) = cz4 + 2
√3iz2 + 1
z4 − 2√
3iz2 + 1(3.9)
where c is real. The numerator and denominator are tetrahedrally symmetric Klein polyno-mials, so R is invariant up to a constant factor under any transformation in the tetrahedralgroup.
For c = 1 there is octahedral symmetry. The extra generator is a 90 rotation aboutthe x3-axis, z 7→ iz. Clearly
R(iz) = 1/R(z) (3.10)
when c = 1. More generally, this 90 rotation replaces c by 1/c. There is a geodesic mo-tion of monopoles, with tetrahedral symmetry throughout, in which four single monopolesapproach on the vertices of a contracting tetrahedron, and recede on the vertices of anexpanding tetrahedron dual to the first [19]. This just corresponds to c running from 0 to∞. Octahedral symmetry occurs at the moment of closest approach.
Using (3.9) in the Skyrme field ansatz, we find that the minimal energy occurs atc = 1, with the value E = 1.137. This is quite close to the energy of the B = 4 SkyrmionE = 1.116, and almost the same as the energy of the best B = 4 instanton generatedSkyrme field [29] which has E = 1.132.
The Wronskian of the map (3.9) is proportional to z(z4 − 1) for all values of c. Thisis the face polynomial of a cube, with faces in the directions 0, 1, i,−1,−i,∞ (i.e. thedirections of the Cartesian axes). We understand from this why the baryon density van-ishes in these directions, and hence why the Skyrmion has a cubic shape, with its energyconcentrated on the vertices and edges of the cube (see Fig. 1c).
N = 5
The B = 5 Skyrmion of minimal energy has symmetry D2d, which is somewhat surprising.An octahedrally symmetric solution exists but has higher energy [11]. There is a family ofrational maps with two real parameters, with the generic map having D2d symmetry, buthaving higher symmetry at special parameter values.
The family of maps is
R(z) =z(z4 + bz2 + a)
az4 − bz2 + 1(3.11)
with a and b real. The two generators of the D2d symmetry are realized as
R(i/z) = i/R(z) and R(−z) = −R(z). (3.12)
13

Additional symmetry occurs if b = 0; R(z) then has D4 symmetry, the symmetry of asquare. There is octahedral symmetry if, in addition, a = −5. This value ensures the 120
rotational symmetry
R(
iz + 1
−iz + 1
)=
iR(z) + 1
−iR(z) + 1. (3.13)
The map R(z) = z(z4 − 5)/(−5z4 + 1) has Wronskian
W (z) = −5(z8 + 14z4 + 1) (3.14)
which is proportional to the face polynomial of an octahedron.Using the maps (3.11) in the Skyrme field ansatz gives a structure which is a polyhe-
dron with eight faces. In the special case b = 0, a = −5, this polyhedron is an octahedron,and the angular integral is I = 52.05, whereas performing a numerical search over theparameters a and b we find that I is minimized when a = 3.07, b = 3.94, taking thevalue I = 35.75. This is consistent with the structure and symmetry of the known B = 5Skyrmion, which is that of a polyhedron made from four pentagons and four quadrilaterals.Minimizing over the profile function we find a Skyrme field with energy E = 1.147 (seeFig. 1d). There is a saddle point at the octahedral parameter values, where E = 1.232(see Fig. 1j). There is a further, higher saddle point at a = b = 0, where the map (3.11)simplifies to R(z) = z5, and gives a toroidal Skyrme field.
N = 6 and N = 8
The Skyrmions with B = 6 and B = 8 both have extended cyclic symmetry. It is straight-forward to find rational maps with these symmetries, and use them with our ansatz.
For B = 6, the desired symmetry is D4d. D4 is generated by z 7→ iz and z 7→ 1/z. Therational maps
R(z) =z4 + ia
z2(iaz4 + 1)(3.15)
have this symmetry, since R(iz) = −R(z) and R(1/z) = 1/R(z). If a is real R(eiπ/4z) =iR(z) and the rational maps have D4d symmetry. With these maps in our ansatz, theminimal energy occurs at a = 0.16, when E = 1.137. The Skyrme field has a polyhedralshape consisting of a ring of eight pentagons capped by squares above and below (see Fig.1e).
For B = 8, the symmetry is D6d. D6 is generated by z 7→ eiπ/3z and z 7→ i/z. Therational maps
R(z) =z6 − a
z2(az6 + 1)(3.16)
have this symmetry. If a is real they have D6d symmetry. This time the minimal energySkyrme field obtained using these maps has E = 1.118 when a = 0.14. The polyhedralshape is now a ring of twelve pentagons capped by hexagons above and below (see Fig. 1g).
14

N = 7
In a sense, the N = 7 case is similar to the cases N = 6 and N = 8, but the Skyrmionhas dodecahedral shape. A dodecahedron is a ring of ten pentagons capped by pentagonsabove and below.
Among the rational maps with D5d symmetry
R(z) =z5 − a
z2(az5 + 1)(3.17)
the one with icosahedral symmetry has a = −3. The Wronskian is then proportional tothe face polynomial of a dodecahedron, namely z(z10 + 11z5 − 1).
In a different orientation, the icosahedrally symmetric map is
R(z) =z7 − 7z5 − 7z2 − 1
z7 + 7z5 − 7z2 + 1(3.18)
which has a similar structure to the octahedrally symmetric N = 4 map ((3.9) with c = 1).We have found it interesting to investigate the dodecahedron in yet another orientation,
where tetrahedral symmetry is manifest. There is a one parameter family of degree sevenmaps with symmetry T. The family is
R(z) =bz6 − 7z4 − bz2 − 1
z(z6 + bz4 + 7z2 − b)(3.19)
where b is complex. It is easy to verify that
R(−z) = −R(z), R(1/z) = 1/R(z) and R(
iz + 1
−iz + 1
)=
iR(z) + 1
−iR(z) + 1. (3.20)
For imaginary b, the symmetry extends to Td and for real b it extends to Th. When b = 0there is octahedral symmetry, and when b = ±7/
√5 there is icosahedral symmetry Yh.
Using (3.19) in our ansatz, we have found the minimal energy at b = ±7/√
5, which givesa dodecahedral Skyrme field, with energy E = 1.107 (see Fig. 1f). There is a saddle pointat b = 0 with a cubic shape.
The real b-axis represents an interesting dynamical process. If we regard the rationalmaps as Jarvis maps of N = 7 monopoles, then motion along the real b-axis is a geodesicin which there is a single monopole at the origin, and six monopoles approaching it alongthe positive and negative Cartesian axes. They pass successively through a dodecahedron,a cube and a second dodecahedron (rotated by 90 relative to the first) before separatinginto a configuration similar to the incoming one (again rotated by 90, which affects theshape but not the positions of the monopoles). A similar motion is possible with sevenSkyrmions, but one must allow for the varying potential energy. The energy of sevenseparated Skyrmions is greater either than the cube or dodecahedron. If the energy issufficient, an oscillatory motion between the two dodecahedra can occur, through the
15

cubic configuration. At higher energy there can be a 7-Skyrmion scattering process goingthrough all these configurations.
So far we have used fairly ad hoc methods to obtain our symmetric rational maps.However, this approach becomes cumbersome for higher degrees and it is more efficient touse a systematic algorithm. By constructing symmetric rational maps we are in effect com-puting bases for two-dimensional representations of finite subgroups of SU(2), for whichclassical group theory can be employed. In the Appendix we describe the construction ofsymmetric rational maps from this more systematic point of view. This construction isillustrated with the example above, tetrahedral symmetry for N = 7, and some furtherexamples occur below.
N = 9
Imposing tetrahedral symmetry on degree nine maps we find, see Appendix, the one pa-rameter family
R(z) =5i√
3z6 − 9z4 + 3i√
3z2 + 1 + az2(z6 − i√
3z4 − z2 + i√
3)
z3(−z6 − 3i√
3z4 + 9z2 − 5i√
3) + az(−i√
3z6 + z4 + i√
3z2 − 1)(3.21)
where a is real. This map is degenerate at the values a = 1,−5,±∞. In terms of thecorresponding 9-monopole configurations, the first of these degenerate values, a = 1, cor-responds to a single monopole at the origin with eight monopoles on the vertices of a cubeat infinity. The value a = −5 corresponds to four monopoles at infinity on the verticesof a tetrahedron, and a = ±∞ represents six monopoles at infinity on the vertices of anoctahedron.
The angular integral I diverges as a degenerate map is approached, so it is clear fromthe above that the family of maps (3.21) contains at least three local minima for I as afunction of a. In Fig. 4 we plot I as a function of a, from which it can be seen that theglobal minimum occurs in the middle interval −5 < a < 1. More explicitly, the minimumoccurs when a = −1.98, and the energy of the resulting Skyrme field is E = 1.123. TheSkyrme field has a polyhedral shape consisting of four hexagons centred on the vertices ofa tetrahedron, linked by four triples of pentagons (see Fig. 1h).
N = 17
For general B > 9 the expected symmetries of the Skyrmion are not great enough tocut down the associated family of rational maps to just one or two parameters. Thus aminimization over a large family of rational maps probably has to be undertaken. However,given the complicated nature of such a space of rational maps (for example, recall the aboveone parameter family of degree nine maps, which contains spurious local minima that liein disconnected sectors) this is a difficult numerical task.
16

Fortunately there are exceptional cases where we expect a highly symmetric configu-ration to occur. One of these is at B = 17, where it has been conjectured [12] that theSkyrmion has the icosahedrally symmetric, buckyball structure of carbon 60. An N = 17rational map with symmetry Yh is, see Appendix,
R(z) =17z15 − 187z10 + 119z5 − 1
z2(z15 + 119z10 + 187z5 + 17). (3.22)
Using this map in our ansatz we obtain a Skyrme field with energy E = 1.092. The verylow value for this energy supports the conjecture that Yh is the symmetry of the minimalenergy B = 17 configuration. The polyhedron does indeed have the buckyball form (seeFig. 1i), consisting of twelve pentagons, each surrounded by five hexagons, making a totalof 32 polygons.
From Fig. 2 it can be seen that the buckyball Skyrmion is quite large, and furthermorethe profile function is extremely flat for small r. This implies that there is a region insidethe shell of the buckyball where the Skyrme field is close to the vacuum (in fact U = −1but this is not important), possibly allowing smaller Skyrmions, for example B = 4, tosit inside the buckyball with little distortion. It would be interesting to investigate thisfurther. It may shed some light on the shell structure of Skyrmions, which appears to befavoured over a crystal structure for the cases investigated so far, but presumably fails forsufficiently large B.
N = 11
We have already constructed several symmetric rational maps, such as the N = 3 examplewith axial symmetry and the N = 5 example with octahedral symmetry, which generateapproximations to saddle point Skyrme fields. Although we have not computed the energyminimizing rational map of degree eleven, we can compute an interesting saddle point mapwhich has icosahedral symmetry, see Appendix. Note that the existence of this map provesthe existence of an icosahedrally symmetric N = 11 monopole, as conjectured in ref. [10].The rational map is
R(z) =11z10 + 66z5 − 1
z(z10 + 66z5 − 11). (3.23)
The value of the angular integral for this map is I = 486.84, which is very large; it is evengreater than the value for the N = 17 map given above (see Table 1). This indicates thatthe minimal energy B = 11 Skyrmion will not have Yh symmetry. Computing the energywe find E = 1.406, which is considerably higher than that of eleven well-separated B = 1Skyrmions. This icosahedral configuration is shown in Fig. 1k.
17

B I APPROX TRUE SYM1 1.00 1.232 1.232 O(3)2 5.81 1.208 1.171 O(2) × ZZ2
3 13.58 1.184 1.143 Td
4 20.65 1.137 1.116 Oh
5 35.75 1.147 1.116 D2d
6 50.76 1.137 1.109 D4d
7 60.87 1.107 1.099 Yh
8 85.63 1.118 1.100 D6d
9 112.83 1.123 1.099 Td
17 367.41 1.092 1.073 Yh
3* 18.67 1.256 1.191 O(2) × ZZ2
5* 52.05 1.232 1.138 Oh
11* 486.84 1.406 1.158 Yh
Table 1 : Comparison between the energies of approximate Skyrmions generated fromrational maps, and the energies of true Skyrmions. The table gives the value of the angularintegral I, and the associated Skyrme field energy (APPROX), together with the energyof the true solution (TRUE), as determined in refs. [12, 11], and the symmetry (SYM) ofthe corresponding Skyrme field. A ∗ denotes a saddle point configuration.
4 Rational Maps and Skyrmion Vibrations
Through our ansatz for Skyrme fields in terms of rational maps we have found approx-imations to several minimal energy Skyrmions of various baryon numbers. It is naturalto guess that varying the rational map parameters will correspond to distortions of theSkyrmions into some of their vibrational modes. It is interesting to investigate this, asBarnes et al. [13, 14] have recently used a numerical simulation of the Skyrme equationto study the spectrum of vibrations around the B = 2 and B = 4 Skyrmions. We caninterpret some of the qualitative features of their results in terms of rational maps, andcan predict what happens in some examples not yet analysed.
We consider first the vibrations of the B = 4 Skyrmion with octahedral symmetry.This Skyrmion has nine zero modes corresponding to translations, rotations and isospinrotations. There are nine low-lying vibrational modes, with frequencies somewhat lessthan the pion mass. These modes lie in multiplets transforming under certain irreduciblerepresentations of the octahedral group O. In increasing order of frequency, these represen-tations are EO, AO
2 , F O2 , F O
2 (in the notation of ref. [30]), respectively of dimensions two,one, three and three. Barnes et al. have presented pictures of the Skyrmion distortion forthese modes of vibration. The next mode is the breather mode (a vibration of the scalesize) which is invariant under the octahedral group, and some higher frequency modes havebeen identified, separate from the continuum of pion field vibrations.
18

It is the modes below the breather which can be identified with variations of the rationalmap parameters. Recall that the rational map of degree four with octahedral symmetry is
R0(z) =z4 + 2
√3iz2 + 1
z4 − 2√
3iz2 + 1. (4.1)
The general variation of this map, in which we preserve the leading coefficient of thenumerator as 1 as a normalization, is
R(z) =z4 + αz3 + (2
√3i + β)z2 + γz + 1 + δ
(1 + λ)z4 + µz3 + (−2√
3i + ν)z2 + σz + 1 + τ(4.2)
where α, β, γ, δ, λ, µ, ν, σ, τ are small complex numbers. We now calculate the effect of thetransformations of the octahedral group leaving R0 fixed. For example, the 90 rotation,represented by the transformation R(z) 7→ 1/R(iz) leaves R0 fixed, but transforms thegeneral map R(z) to
R(z) =(1 + λ)z4 − iµz3 + (2
√3i − ν)z2 + iσz + 1 + τ
z4 − iαz3 − (2√
3i + β)z2 + iγz + 1 + δ. (4.3)
Normalizing this by dividing top and bottom by 1+λ, and ignoring quadratic and smallerterms in the small parameters, we get
R(z) =z4 − iµz3 + (2
√3i − ν − 2
√3iλ)z2 + iσz + 1 + τ − λ
(1 − λ)z4 − iαz3 + (−2√
3i − β + 2√
3iλ)z2 + iγz + 1 + δ − λ. (4.4)
Therefore the transformation acts linearly on the nine parameters α, .., τ via a 9×9 matrixthat can be read off from this expression. The only contribution to the trace of the 9 × 9matrix is the −1 associated with the replacement of λ by −λ in the leading term of thedenominator. So the character χ of the 90 rotation in this representation is −1.
We really need to consider this representation as a real eighteen-dimensional one, so thecharacter above becomes χ = −2. From now on we shall work with real representations.
Similar calculations for the elements of each conjugacy class of the octahedral groupgive the characters listed in Table 2, where I is the identity, C4 denotes a 90 rotation andC2
4 is the square of this, C3 denotes a 120 rotation and C2 a rotation by 180 which is notthe square of a 90 rotation.
Class Character χI 18
6C4 −23C2
4 28C3 06C2 −2
Table 2 : Characters of the group O acting on the real eighteen-dimensional parameterspace of deformations of the octahedral degree four rational map.
19

The character table of O tells us that this eighteen-dimensional representation splitsinto the irreducible components 2AO
2 + 2EO + 2F O1 + 2F O
2 .To find which of the irreducible representations correspond to true vibrations we need
to remove those corresponding to zero modes. First we need to remove the representa-tion associated with SU(2) Mobius transformations of R0(z) which correspond to isospinrotations of the Skyrme field. So we consider the infinitesimal deformations
R0(z) 7→ (1 + iǫ)R0(z) + ǫ′
−ǫ′R0(z) + (1 − iǫ)(4.5)
where ǫ is real, and ǫ′ complex. Under the transformations of the octahedral group thecharacters are χ(I) = 3, χ(C4) = −1, χ(C2
4) = 3, χ(C3) = 0, χ(C2) = −1, so theseparameter variations transform as AO
2 + EO. Similarly, the parameter variations whichcorrespond to translations and rotations transform under the octahedral group as F O
1 +F O1 .
From the above eighteen-dimensional representation we therefore subtract AO2 + EO +
F O1 + F O
1 to obtain the representation of the true vibrations, which has the irreduciblecomponents AO
2 +EO+F O2 +F O
2 , and is nine-dimensional. These irreducible representationsare precisely the ones found by Barnes et al. for the low-lying Skyrmion vibrations.
Barnes et al., in their calculations of the vibrations of the B = 2 toroidal Skyrmion[14],found just one doubly degenerate mode of vibration of low frequency (below the breather),and it corresponds to the deformation of the rational map (3.4) as a varies away from zero(corresponding to the separation mode for two monopoles).
We have done a similar analysis for the vibrational modes of the B = 3 tetrahedralSkyrmion. From the rational map parametrization we predict that there are five low-lyingmodes, transforming as ET +F T of the tetrahedral group Td. This result slightly disagreeswith Walet’s [27] estimate of the vibrations using the instanton approximation of Skyrmefields. Although Walet found the lowest modes to be in an ET +F T , he also found a secondtriplet of modes just below the breather. Our results suggest that this second triplet shouldreally have a higher frequency, but this must be checked using the exact solution and itsvibrations.
Since the B = 7 Skyrmion has Y symmetry, its vibrational modes also fall into largedegenerate multiplets. The rational maps involved have degree seven and it is useful tosimplify the calculation by adopting the representation theory perspective of the Appendix.
A degree N rational map R = (p0, q0) is G-symmetric when p0 and q0 span a two-dimensional representation of G inside N + 1. This means that acting with g ∈ G on (x, y)has the effect of transforming (p0, q0) by some 2 × 2 matrix Dg. Put another way, theg transformation of (x, y) followed by the D−1
g transformation of the rational map leaves(p0, q0) unchanged. To find the transformation properties of the vibrations, a general (p, q)is transformed in this way.
We know how a general homogeneous polynomial transforms under G; it is in therepresentation N + 1|G. We also know the Dg representation; it is the two-dimensionalrepresentation in N + 1|G corresponding to R. The D−1
g representation E can be calculatedfrom this. Transforming p and q under N + 1|G and then under E is a N + 1|G × Etransformation of (p, q), where (p, q) is regarded as a (2N + 2)-dimensional vector. Thus,
20

to find the transformation properties of the vibrations we decompose N + 1|G × E intoirreducible representations of G.
In the B = 7 case8|Y = E ′Y
2 + I ′Y . (4.6)
The icosahedral Skyrmion corresponds to E ′Y2 . That is the representation of the Dg’s
mentioned above. All elements of Y lie in the same conjugacy class as their inverses, sothe D−1
g representation is also E ′Y2 . Each character of 8|Y ×E ′Y
2 is obtained by multiplyingthe corresponding one for 8|Y with that for E ′Y
2 . These are listed in Table 3.
Class 8|Y E ′Y2 8|Y × E ′Y
2
I 8 2 16
12C5 −1/2 −√
5/2 1/2 −√
5/2 1
12C25 1/2 −
√5/2 −1/2 −
√5/2 1
20C3 1 1 115C2 0 0 0
Table 3 : Characters for representations of Y associated with vibrations of the B = 7Skyrmion.
Knowing the characters, we find the decomposition
8|Y × E ′Y2 = AY + F Y
1 + F Y2 + GY + HY . (4.7)
There are copies of this decomposition corresponding to real variations and to imaginaryvariations. This means the variations around the B = 7 Skyrmion transform as 2AY +2F Y
1 + 2F Y2 + 2GY + 2HY . The 2AY are the trivial variations caused by multiplying the
icosahedral p0 and q0 by the same constant. The vector representation of the icosahedralgroup is F Y
1 , so translations and rotations account for 2F Y1 , and Mobius transformations
account for an F Y2 . The representation of the true vibrations therefore has irreducible
components F Y2 +2GY +2HY , with degeneracies three, four, four, five and five, respectively.
5 Morse Function on Monopole Moduli Spaces
The Skyrme field ansatz (2.3), using a rational map R(z), leads to a contribution to theSkyrme energy given by
I =1
4π
∫ (1 + |z|21 + |R|2
∣∣∣∣dR
dz
∣∣∣∣)4 2i dzdz
(1 + |z|2)2. (5.1)
Now we may regard I simply as a function on the space of rational maps of any givendegree, N . If we also identify rational maps with monopoles, via the Jarvis construction,I becomes a function on the N -monopole moduli space. I respects some, but not all,
21

the natural symmetries of the monopole moduli space. I is invariant under rotations ofthe target S2, hence descends to the usual (4N − 1)-dimensional moduli space MN . It isalso invariant under rotations of the domain S2, hence is unchanged when the monopoleconfiguration is rotated. I is not, however, invariant under a translation of the monopoleconfiguration in IR
3.It appears that I is a “proper” Morse function, that is, the set of rational maps, and
hence monopoles, for which I has any particular finite value is compact. We have notverified this in general. It is necessary to prove that I tends to infinity whenever therational map degenerates. We have seen this happen in several cases mentioned in Section4. Such a degeneracy corresponds to one or more monopoles moving off to infinity.
We have calculated one special case analytically. Consider the rational maps R(z) = cz.The phase of c is unimportant, so let c be real and positive. R degenerates if either cbecomes zero or infinite. Since R has degree one, it is the Jarvis map of a single monopole,centred, in fact, at (0, 0, 2 log c). The integral I reduces to
I = 2c4∫
∞
0
ρ(1 + ρ2)2 dρ
(1 + c2ρ2)4=
1
3(c2 + 1 + 1/c2). (5.2)
So I indeed diverges if c → 0 or c → ∞. The minimal value is I = 1 when c = 1, asexpected. For a rational map of the form R = (z − a)/(z − b), the integral again divergesas b approaches a; this is equivalent, by a Mobius transformation, to the example R(z) = czwith c → ∞. Generally, one may expect I to diverge whenever a zero and a pole of Rcome together.
Having a proper Morse function I defined on the monopole moduli space helps usunderstand the topology of the moduli space. We have investigated the 3-monopole modulispace in this way. The stationary points of I on M3 consist of a number of orbits of therotation group SO(3). Among the D2 symmetric maps of the form (3.6) we found just twotypes of stationary point for I. Assuming that I has no further types of stationary point,then on M3, I has two stationary orbits. One is the set of N = 3 tori (centred at theorigin). This is a two-dimensional orbit. Each torus is a saddle point, with two independentunstable modes (related by rotations about the symmetry axis). The unstable manifold ofthis orbit (suitably completed) is therefore a 4-cycle. By symmetry, the unstable manifoldincludes all the rational maps (3.6) with a lying on the great circle segment 0 ≤ ia < 1.The unstable manifold therefore consists of the orbits under SO(3) of all the rational mapsof the form (3.6), with a in this interval. The other stationary orbit is the set of tetrahedra(again centred at the origin), which is the orbit of minima. This orbit is three-dimensional,and completes the 4-cycle. We have tried to visualize this 4-cycle as a smooth submanifoldof M3, but have found this difficult in the neighbourhood of the tetrahedra.
A 4-cycle is the basic non-trivial compact homology cycle which is predicted by thecalculations of Segal & Selby [31]. It would be interesting if the Sen 4-form, representinga bound state of three monopoles [32], were concentrated around the particular 4-cycle wehave found.
These calculations suggest that further investigation of I as a Morse function on MN
would be worthwhile.
22

6 Conclusion
We have introduced a new ansatz for Skyrme fields, based on rational maps. This allowsus to construct good approximations to several Skyrmions and helps us understand thesimilarities which have been observed between Skyrmions and BPS monopoles. A certainblack hole with hair has states with a remarkably similar structure to Skyrmions, alsorelated to rational maps [33]. Thus it appears that a whole class of solitonic objects inthree space dimensions may be understood via the kind of rational map approach whichwe employ here.
We have used our ansatz to study the low-lying vibrational modes of Skyrmions. Forthe B = 2 and B = 4 Skyrmions, our results agree qualitatively with those obtainednumerically, and we can predict the structure of the vibrational spectrum for other cases,in particular B = 3 and B = 7.
Finally, the relationship between monopoles and Skyrmions has led us to an interestingMorse function on the monopole moduli spaces which may be of use in understanding thehomology of the moduli spaces and thus predictions made by duality.
Acknowledgements
It is a pleasure to thank Erick Weinberg for fruitful discussions at an early stage of thiswork. We also thank Richard Battye and Neil Turok for useful comments. NSM andPMS are grateful for the hospitality of the Isaac Newton Institute, where some of thiswork was done. PMS acknowledges support from the Nuffield Foundation and thanksthe Cambridge Philosophical Society for a travel bursary. CJH thanks the EPSRC for aresearch studentship and the British Council for a Chevening award.
Appendix Systematic calculation of symmetric maps
For low degrees, symmetric rational maps may be constructed by explicitly performingthe group transformations on a general rational map and deriving constraints on the coef-ficients. For higher degrees and for larger groups it is useful to employ the theory of grouprepresentations in the construction of the symmetric rational maps. In this Appendix sucha construction will be described, and applied to the example of degree seven maps withtetrahedral symmetry.
To construct symmetric rational maps it is convenient to employ homogeneous projec-tive coordinates x and y on the Riemann sphere, rather than the inhomogeneous z = x/yemployed earlier. A rational map is a map from Riemann sphere to Riemann sphere of theform
R(x, y) = (p(x, y), q(x, y)) (A1)
23

where p and q are homogeneous polynomials. In the (x, y) coordinates, an SO(3) rotationin space by θ about the direction of the unit vector (n1, n2, n3) is realized by the SU(2)
transformation exp(iθ2n · σ
), whose action on the Riemann sphere is
x 7→ x′ = (d + ic)x − (b − ia)y (A2)
y 7→ y′ = (b + ia)x + (d − ic)y
where a = n1 sin θ2, b = n2 sin θ
2, c = n3 sin θ
2and d = cos θ
2. Furthermore, for our purposes,
two rational maps are equivalent if they can be mapped into each other by an SU(2)transformation of the target sphere, that is by a transformation of p and q of the form (A2).A rational map is symmetric under some finite group G ⊂ SU(2) if G transformations ofx and y map it into an equivalent map.
A degree N homogeneous polynomial is a polynomial of the form
p(x, y) =N∑
i=0
aixiyN−i. (A3)
Under SU(2) transformations (A2) of x and y the space of degree N homogeneous polyno-mials transforms under the unique irreducible (N+1)-dimensional representation of SU(2):N + 1. This N + 1 is also a representation of any finite subgroup G of SU(2), generally re-ducible. It is easy to calculate its decomposition into irreducible representations, because,in N + 1, the element exp
(iθ2n · σ
)has character
sin(
N+12
)θ
sin θ2
(A4)
for any n. There are tables of these reductions given in, for example, ref. [34].Suppose two degree N homogeneous polynomials p(x, y) and q(x, y) lie in the same two-
dimensional representation of G; then, G transformations of x and y will result in GL(2, C)transformations of (p(x, y), q(x, y)). If, further, p(x, y) and q(x, y) are orthonormal asvectors in the N + 1 carrier space, then, projectively, the G action on x and y resultsonly in SU(2) transformations of (p(x, y), q(x, y)). Therefore, the rational map R(x, y) =(p(x, y), q(x, y)) is G symmetric.
This means that there is a systematic way of deciding whether there are G symmet-ric maps of some degree N . The representation N + 1 is decomposed into irreduciblerepresentations of G. If
N + 1|G = E + other irreducible representations of G, (A5)
where E is a two-dimensional irreducible representation of G, and if the basis polynomialsfor E have no common factor, then there is a G symmetric degree N map. If they havea common factor then the resulting rational map has lower degree. This occurs when theE in N + 1 is the product of lower degree polynomials; this is illustrated with an examplebelow. It might also happen that
N + 1|G = A1 + A2 + other irreducible representations of G, (A6)
24

where A1 and A2 are one-dimensional representations of G. In this case there is a oneparameter family of G symmetric rational maps: if p(x, y) is in A1 and q(x, y) is in A2 thenthe family
R(x, y) = (ap(x, y), q(x, y)) (A7)
is G symmetric.The example of tetrahedral symmetry for degree seven is now discussed. Let us consider
the representation 8. Under restriction to T
8|T = 2E ′T + G′T , (A8)
that is, two two-dimensional irreducible representations of T occur in the decompositionof 8. Furthermore, there is an arbitrariness in the decomposition
2E ′T = E ′T + E ′T , (A9)
and this allows a one parameter family of tetrahedrally symmetric rational maps to beconstructed.
The tetrahedral group is both a subgroup of the octahedral group O and a subgroup ofthe icosahedral group Y . We can decompose 8 as a representation of Y and of O. We find
8|O = E ′O1 + E ′O
2 + G′O, (A10)
8|Y = E ′Y2 + I ′Y . (A11)
We can decompose these representations further by restriction to T
E ′O1 |T = E ′T , (A12)
E ′O2 |T = E ′T ,
G′O|T = G′T
and
E ′Y2 |T = E ′T , (A13)
I ′Y |T = E ′T + G′T .
In this way, we see that T has two identical two-dimensional irreducible representations in8. O has two as well but they are different and Y only has one. The carrier spaces of theserepresentations are two-dimensional subspaces of the carrier space of 8, a space which isrealised as degree seven homogeneous polynomials. The symmetric rational maps we wishto calculate are constructed from the bases of the two-dimensional spaces.
There are simple and venerable methods for calculating such bases explicitly. They areexplained in Serre’s book [35]. Consider U , a reducible representation of a group G,
G → GL(U) (A14)
g 7→ ρ(g),
25
which decomposes into irreducible representations Vi,
U = V1 + . . . + V1 + V2 + . . . + V2 + . . . . . . + Vh + . . . + Vh (A15)
= W1 + . . . + Wh
whereWi = Vi + Vi + . . . + Vi. (A16)
If the irreducible representation Vi has character χi(g) for g ∈ G, and ni = dimWi, then
Pi =ni
|G|∑
g∈G
χi(g)⋆ρ(g) (A17)
is the projection operatorPi : U → Wi. (A18)
Using MAPLE these projection operators can be calculated.Since E ′T appears twice in 8|T , projection onto E ′T gives a four-dimensional space. To
work out a basis for this space, the projection operator
P : 8 → 2E ′T (A19)
must be calculated using (A17). The T ⊂ SU(2) transformations of (x, y) are first calcu-lated explicitly. In the orientation where each edge of the tetrahedron has its midpoint ona Cartesian axis, the C2 element about the x3-axis has c = −1 and a = b = d = 0 andhence
x′ = −ix (A20)
y′ = iy.
The C3 element about the x1 = x2 = x3 axis has a = b = c = d = 1/2 and hence
x′ =1 + i
2x +
1 − i
2y (A21)
y′ = −1 + i
2x +
1 − i
2y.
These two generate T , so we can calculate expressions for the (x, y) transformations for all24 elements of T . Using MAPLE, we calculate the effects of these transformations on degreeseven polynomials, hence determining the 8× 8 matrices ρ(g) for each element g ∈ T , andhence, using (A17), the projection operator P . The resulting polynomials in the image ofP are
p1(x, y) = −7x4y3 − y7, (A22)
p2(x, y) = x7 + 7x3y4,
p3(x, y) = x6y − x2y5,
p4(x, y) = x5y2 − xy6.
26

This particular basis is chosen because it is convenient for what follows.From (A12) it follows that there lie in this four-dimensional space two different repre-
sentations of the octahedral group O. In the chosen orientation, O is generated by T andthe C4 rotation around the x3-axis:
x′ =1 + i√
2x (A23)
y′ =1 − i√
2y
and so the projection operators for E ′O1 and E ′O
2 can be calculated. It is found that p1(x, y)and p2(x, y) are a basis for E ′O
1 and p3(x, y) and p4(x, y) are a basis for E ′O2 . The rational
mapR(x, y) = (p1(x, y), p2(x, y)) (A24)
is therefore octahedrally symmetric. However p3(x, y) and p4(x, y) have a common factorand the corresponding rational map is spurious; it is not of degree seven. This is notsurprising. The one-dimensional representation AO
2 in 7|O = AO2 + F O
1 + F O2 has basis
x5y−xy5, the two-dimensional representation 2|O = E ′O1 has basis x, y, and AO
2 ×E ′O1 = E ′O
2 .Recall that T is also a subgroup of Y . In fact, for our choice of orientation for the
tetrahedral group, there are two possible icosahedral groups with it as a subgroup. Thegroup Y is generated by T and a C5 element. The two choices of Y correspond to addinga C5 rotation about the radial line passing through (−1, 0, τ) or about the line passingthrough (1, 0, τ), where τ = (1 +
√5)/2. The two possibilities are related by a rotation
by 90 about the x3-axis. The E ′Y2 has basis p1(x, y) ± (7/
√5)p3(x, y) and p2(x, y) ±
(7/√
5)p4(x, y); the sign depends on the choice of C5 element.Let us now consider the decomposition of 2E ′T into E ′T + E ′T . Luckily, such decom-
positions are discussed in [35] where the following construction is presented. We have,generally, some reducible representation U , where, as in (A15),
U = W + other irreducible representations of G (A25)
and W is the sum of m identical irreducible representations V ,
W = mV. (A26)
Let n = dimV (in our example n = 2). In V each g ∈ G is represented by an n × nmatrix, say r(g). From these the projection operators
Pαβ =n
|G|∑
g∈G
rαβ(g−1)ρ(g) (A27)
are calculated. Here, α, β are simply the matrix indices of r. Now Pαα projects onto anm-dimensional space we will call Ωα, and W can be expressed as the direct sum
W = Ω1 + Ω2 + . . . + Ωn. (A28)
27

Furthermore, the map Pβα is an isomorphism from Ωα to Ωβ and vanishes on all Ωγ forγ 6= α. If (ω1, ω2, . . . , ωm) is a basis for Ω1 then the space spanned by
Yν = (ων , P21(ων), P31(ων), . . . , Pn1(ων)). (A29)
is isomorphic to V andW = Y1 + Y2 + . . . + Ym (A30)
is a decomposition of W of the form (A26). Choosing a particular decomposition is equiv-alent to choosing a particular basis (ω1, ω2, . . . , ωm) for the space Ω1.
In the example we are considering, W = 2E ′T . This space is spanned by the polynomials(A22). Using MAPLE the projection operators P11 and P21 are constructed. It is found thatthe space P11 : W → Ω1 is spanned by p1 and p3. Choosing a vector p1 + bp3 in this spacedefines a particular E ′T ⊂ 2E ′T . Using P21 we derive from this the one-parameter familyof tetrahedrally symmetric rational maps
R(x, y) = (p1 + bp3, p2 + bp4), (A31)
or in inhomogenous coordinates
R(z) =bz6 − 7z4 − bz2 − 1
z(z6 + bz4 + 7z2 − b)(A32)
where b is complex. For imaginary b, the symmetry extends to Td and for real b it extendsto Th. For b = 0, there is octahedral symmetry Oh and for b = ±7/
√5 there is icosahedral
symmetry Yh.We have used similar methods to calculate icosahedrally symmetric maps for degrees
eleven and seventeen and to calculate tetrahedrally symmetric maps of degree nine. In thetwo icosahedral cases there is a single symmetric rational map
12|Y = E ′Y1 + G′Y + I ′Y , (A33)
18|Y = E ′Y2 + G′Y + 2I ′Y ,
and to construct the map we need only calculate a basis for E ′Y in each case. For degreenine
10|T = E ′T + 2G′T . (A34)
The representation G′T is a sum of two two-dimensional irreducible representations of T .Because they are complex conjugate representations they are amalgamated under the nameG′T in the standard nomenclature. If we write G′T = E ′T
1 + E ′T2 then
10|T = E ′T + 2E ′T1 + 2E ′T
2 (A35)
and a one parameter family of symmetric rational maps can be constructed from 2E ′T1 . The
corresponding family constructed from 2E ′T2 is related by inversion. The representation E ′T
does not give a genuine degree nine map.
28

References
[1] T.H.R. Skyrme, Proc. Roy. Soc. A 260 (1961) 127.
[2] M.K. Prasad and C.M. Sommerfield, Phys. Rev. Lett. 35 (1975) 760.
[3] E.B. Bogomolny, Sov. J. Nucl. Phys. 24 (1976) 449.
[4] R.S. Ward, Commun. Math. Phys. 79 (1981) 317.
[5] V.B. Kopeliovich and B.E. Stern, JETP Lett. 45 (1987) 203.
[6] N.S. Manton, Phys. Lett. B 192 (1987) 177.
[7] J.J.M. Verbaarschot, Phys. Lett. B 195 (1987) 235.
[8] E. Braaten, S. Townsend and L. Carson, Phys. Lett. B 235 (1990) 147.
[9] N.J. Hitchin, N.S. Manton and M.K. Murray, Nonlinearity 8 (1995) 661.
[10] C.J. Houghton and P.M. Sutcliffe, Nonlinearity 9 (1996) 385.
[11] R.A. Battye and P.M. Sutcliffe, Bound states and dynamics of Skyrmions in (3+1)dimensions, in preparation (1997).
[12] R.A. Battye and P.M. Sutcliffe, Phys. Rev. Lett. 79 (1997) 363.
[13] C. Barnes, W.K. Baskerville and N. Turok, Phys. Rev. Lett. 79 (1997) 367.
[14] C. Barnes, W.K. Baskerville and N. Turok, Phys. Lett. B 411 (1997) 180.
[15] S.K. Donaldson, Commun. Math. Phys. 96 (1984) 387.
[16] N.J. Hitchin, Commun. Math. Phys. 83 (1982) 579.
[17] N.J. Hitchin, Commun. Math. Phys. 89 (1983) 145.
[18] S. Jarvis, A rational map for Euclidean monopoles via radial scattering, Oxfordpreprint (1996).
[19] C.J. Houghton and P.M. Sutcliffe, Commun. Math. Phys. 180 (1996) 343.
[20] N.S. Manton, Phys. Lett. B 110 (1982) 54.
[21] H. Weigel, B. Schwesinger and G. Holzwarth, Phys. Lett. B 168 (1986) 321.
[22] N.S. Manton, Commun. Math. Phys. 111 (1987) 469.
[23] R. Bielawski, Nonlinearity 9 (1996) 1463.
29
[24] C.J. Houghton and P.M. Sutcliffe, Nonlinearity 9 (1996) 1609.
[25] C.J. Houghton and P.M. Sutcliffe, Nucl. Phys. B 464 (1996) 59.
[26] R.A. Battye and P.M. Sutcliffe, Phys. Lett. B 391 (1997) 150.
[27] N.R. Walet, Nucl. Phys. A 606 (1996) 429.
[28] F. Klein, Lectures on the icosahedron, (Kegan Paul, London, 1913).
[29] R.A. Leese and N.S. Manton, Nucl. Phys. A 572 (1994) 675.
[30] M. Hamermesh, Group theory and its application to physical problems, (Addison-Wesley, Reading, 1962).
[31] G. Segal and A. Selby, Commun. Math. Phys. 177 (1996) 775.
[32] A. Sen, Phys. Lett. B 329 (1994) 217.
[33] S.A. Ridgway and E.J. Weinberg, Phys. Rev. D 52 (1995) 3440.
[34] G.F. Koster, J.O. Dimmock, R.G. Wheeler and H. Statz, Properties of the thirty-twopoint groups, (M.I.T. Press, Cambridge, 1963)
[35] J.-P. Serre, Linear representations of finite groups, (Springer-Verlag, New York, 1993).
30

Figure Captions
Fig. 1: Surfaces of constant baryon density for the following Skyrme fields:a) B = 2 torusb) B = 3 tetrahedronc) B = 4 cubed) B = 5 with D2d symmetrye) B = 6 with D4d symmetryf) B = 7 dodecahedrong) B = 8 with D6d symmetryh) B = 9 with tetrahedral symmetryi) B = 17 buckyballj) B = 5 octahedronk) B = 11 icosahedron
Fig. 2: The profile functions f(r) for baryon numbers one to nine and also seventeen.
Fig. 3: The a-sphere parametrizing the degree three rational maps (3.6). Crosses denotedegenerate maps, dots denote toroidal maps and triangles denote the tetrahedral maps.
Fig. 4: The integral I for the family of degree nine maps (3.21).
31

a b cd e f
g hi j k
Figure 1
32

0
0.5
1
1.5
2
2.5
3
3.5
0 2 4 6 8 10
Figure 2
33
8a=i
a=-i
a=
a=
0
Figure 3
34

100
200
300
400
500
600
700
800
900
1000
-12 -10 -8 -6 -4 -2 0 2 4 6 8
Figure 4
35