Memory retrieval processing: Neural indices of processes supporting episodic retrieval

Fingerprinting Protein Structures Effectively andEfficientlyXuefeng Cui 1, Shuai Cheng Li 2 ∗, Lin He 1, Ming Li 1 †
1David R. Cheriton School of Computer Science, University of Waterloo2Department of Computer Science, City University of Hong Kong
ABSTRACTMotivation: One common task in structural biology is to assess thesimilarities and differences among protein structures. A variety ofstructure alignment algorithms and programs have been designedand implemented for this purpose. A major drawback with existingstructure alignment programs is that they require a large amount ofcomputational time, rendering them infeasible for pairwise alignmentson large collections of structures. To overcome this drawback,a fragment alphabet learned from known structures has beenintroduced. The method, however, considers local similarity only,and therefore occasionally assigns high scores to structures that aresimilar only in local fragments.Method: We propose a novel approach that eliminates false positives,through the comparison of both local and remote similarity, with littlecompromise in speed. Two kinds of contact libraries (ContactLib) areintroduced to fingerprint protein structures effectively and efficiently.Each contact group of the contact library consists of one local or tworemote fragments and is represented by a concise vector. Thesevectors are then indexed and used to calculate a new combinedhit-rate score to identify similar protein structures effectively andefficiently.Results: We tested our method on the high-quality protein structuresubset of SCOP30 containing 3, 297 protein structures. For eachprotein structure of the subset, we retrieved its neighbor proteinstructures from the rest of the subset. The best area under theROC curve, archived by ContactLib, is as high as 0.960. This is asignificant improvement compared to 0.747, the best result achievedby FragBag. We also demonstrated that incorporating remote contactinformation is critical to consistently retrieve accurate neighbor proteinstructures for all-β query protein structures.Availability:
1 INTRODUCTIONWhile assessing the similarities and differences between proteinstructures is a common practice in structural biology, efficientlyperforming this comparison is critical in some applications. Forexample, once a new protein structure is determined, researchersoften need to infer its function or evolution by studying proteins ofsimilar structures. A few databases, such as SCOP (Murzin et al.,
∗to whom correspondence should be addressed: [email protected]†to whom correspondence should be addressed: [email protected]
1995; Chandonia et al., 2004) and CATH (Orengo et al., 1997),maintain hierarchical classifications of known protein structures.The need to obtain structures similar to the new protein fromthese databases motivates the neighbor protein structure retrievalproblem: Given a query protein structure and a database of proteinstructures, retrieve all the structures in the database that are similarto the query structure.
One intuitive solution to the neighbor protein structure retrievalproblem is to align the query protein structure and everyprotein structure of the database using a pairwise proteinstructure alignment tool. One successful approach of pairwiseprotein structure alignment is to represent protein structures as3D coordinates and to find the optimal residue mapping andorientation (rotation and translation) together, as stralign (Akutsu,1996), CE (Shindyalov and Bourne, 1998), LGA (Zemla, 2003),SSM (Krissinel and Henrick, 2004), TMalign (Zhang and Skolnick,2005) and SPalign (Yang et al., 2012) proposed. An orientation-free approach is possible by encoding each structure as a2D matrix of residue-residue interaction distances; comparisonbetween two structures can be performed by an “alignment”of their respective matrices as proposed in DALI (Holm andSander, 1993). One drawback of adopting these approaches isinefficiency, especially when the protein structure database islarge. Either using 3D coordinates or using distance matrices,solving the pairwise protein structure alignment problem is NP-hard (Kolodny and Linial, 2004). Thus, all above pairwise proteinstructure alignment tools adopt heuristic approaches without globaloptimality guarantee. Unfortunately, such heuristic approaches arestill time-consuming (Kolodny et al., 2005; Aung and Tan, 2007).
The concern for efficiency has prompted the use of 1D proteinstructure profiles, which often perform very well. In particular, thecurrent state-of-the-art method called FragBag (Budowski-Tal et al.,2010) has been shown experimentally to be fast and accurate onaverage. Specifically, FragBag represents a protein structure as aprofile that contains counts of structure fragments in a fragmentalphabet learned from known structures. Then, neighbor proteinstructures can be retrieved by comparing the profiles efficiently.One drawback, however, is that although FragBag is capableof delivering good average accuracy, its accuracy is sometimessignificantly worse than the average accuracy, as shown in Section3.1. This accuracy drop occurs when two structures are similarin many local fragments but differ significantly in their overall
1
https://cs.uwaterloo.ca/xfcui/contactlib/.
Associate Editor: Prof. Anna Tramontano
© The Author (2013). Published by Oxford University Press. All rights reserved. For Permissions, please email: [email protected]
Bioinformatics Advance Access published November 29, 2013 by guest on June 21, 2015
http://bioinformatics.oxfordjournals.org/
Dow
nloaded from

structure; since FragBag compares only local contacts, it fails toidentify the large non-local discrepancy in these structures.
In this paper we present ContactLib, a complete contact grouplibrary defined in Section 2, which is to be used as fingerprintsof protein structures. FragBag (Budowski-Tal et al., 2010) andlocal feature frequency profile (LFFP) (Choi et al., 2004) aretwo promising tools that are closely related. Our ContactLibis different from FragBag and LFFP in following ways: (1)FragBag and LFFP are developed on general structure fragments,while ContactLib introduces both local and remote contact groupseliminating potentially weak contact groups; (2) FragBag and LFFPuse 3D coordinates or 2D distance matrices, while ContactLibintroduces 1D distance vectors that can be efficiently indexed;(3) FragBag and LFFP require a predefined word alphabet, whileContactLib avoids such word alphabet and introduces some freedomof specifying similarity thresholds at runtime; (4) FragBag andLFFP use word frequency profiles and distance functions from thetext information retrieval problem, while ContactLib introduces acombined hit-rate scoring function for the neighbor protein structureretrieval problem. Since the word alphabet of LFFP is not publiclyavailable, we focus on comparing ContactLib and FragBag in thispaper.
As an initial study, we built two ContactLibs: ContactLib-9L,that models local contacts, and ContactLib-3R, that models remotecontacts. Using one or both of ContactLib-9L and ContactLib-3R,we tested our method on the high-quality protein structure subset ofSCOP30 (Murzin et al., 1995; Chandonia et al., 2004) containing3, 297 protein structures. For each protein structure, we retrieved itsneighbor protein structures from the rest.
According to the ROC curve analysis (Fawcett, 2006) in Section3.1, the best area under the ROC curve (AUROC), archived byContactLib, is as high as 0.960. This is a significant improvementcompared to 0.747, the best result achieved by FragBag (Budowski-Tal et al., 2010). Specifically, when ContactLib-3R is used, 75%of the AUROC’s are higher than 0.936, and the lowest AUROCis 0.504. When ContactLib-9L is used, 75% of the AUROC’sare higher than 0.823, and 3% of the AUROC’s are lower than0.5. However, when FragBag is used, 75% of the AUROC’s arehigher than 0.657, and 10% of the AUROC’s are lower than 0.5.Therefore, the worst-case AUROC is significantly improved byusing ContactLib, and ContactLib-3R is even able to guaranteean AUROC higher than a random method, which has an AUROCequals to 0.5.
We also demonstrated that incorporating remote contactinformation is critical to consistently retrieve accurate neighborprotein structures for all-β query protein structures, which is morechallenging than that for all-α query protein structures, in Section3.2. Moreover, we demonstrated that if two contact groups havesimilar structures with low root mean square deviation (RMSD)values, they tend to have similar distance vectors, which are used toindex contact groups, in Section 3.3. Finally, we discussed severalfuture extensions and applications of ContactLib in Section 4.
2 CONTACTLIB NEIGHBOR PROTEINSTRUCTURE RETRIEVAL
In this section, we first define a contact group. Then, we builda comprehensive library of contact groups as fingerprints of all
existing protein structures and we call such a contact group libraryContactLib. We also propose an indexing technique for ContactLib,which may be applied to neighbor contact group retrieval. Finally,we introduce a combined hit-rate score to retrieve neighbor proteinstructures.
A contact group in this paper refers to a small collection ofresidues that may have a high density of contacts among theresidues. As two residues in contact should not be far apart, werequire all residues are within a sphere. The position of eachresidue here is represented by its Cα atom. A local contact groupmodels contacts within a protein structure fragment and a remotecontact group could involve two or more structure fragments. Due tochemical and physical constraints within limited sphere space, it israre for a contact group to contain a large number of fragments. Forconciseness, we require a remote contact group to involve exactlytwo fragments. Hence, we define a contact group as:
DEFINITION 1 (Contact Group). A contact group is a set ofresidues, represented by the respective Cα atoms, of either a singlefragment with l1 residues, called a local contact group, or a pair offragments with l2 residues, called a remote contact group, such thatall the Cα atoms are located within a sphere of radius r.
Here, we set l1 = 9 and l2 = 3 as we find that they aresufficient to accurately model a local and a remote contact group,respectively. The fragment length of nine has also been used andshown to be the optimal fragment length to model protein structurefragments (Simons et al., 1997; Maadooliat et al., 2012). Moreover,the radius of the sphere is set to be r = 16A, so that it is largeenough to capture most contacts. Then, we define a ContactLib as:
DEFINITION 2 (ContactLib). A ContactLib is a contact grouplibrary containing local and/or remote contact groups in all proteinstructures of the search protein structure database.
We use the contact groups to fingerprint protein structures. Tocreate an efficient and effective index of the ContactLib, we devisea strategy to represent a contact group by a low-dimensional vector.Before defining such a representation, we examine the number ofdimensions or the degree of freedom of a contact group; that is,we want to know how many values are necessary to reconstruct acontact group.
We determine the dimension of a contact group as follows: Aprotein structure can be represented by bond angles, bond lengthsand dihedral angles (Cui et al., 2013; Rice and Brunger, 1994). Thefixed bond length and bond angle structures have been widely usedin modeling protein structures (Simons et al., 1997; Li et al., 2008;Canutescu et al., 2003; Guntert and Wuthrich, 1991). The peptidedihedral angles (that is, the Ω angles) are also rounded to either0 or π. Since less than 2% of the Ω dihedral angles have a valuecloser to 0, it is treated as a rare case (Engh and Huber, 2006).Hence, it is acceptable to use Ω = π as a good approximation,which results in the distance between two adjacent Cα atoms to be3.8A. If we connect any two adjacent Cα atoms by such a pseudobond, the number of dihedral angles in this pseudo molecule ofa local contact group is l1 − 3, and the number of bond anglesin it is l1 − 2. Thereafter, the dimension required to represent alocal contact group is 2l1 − 5 = 13. Similarly, the number ofdihedral angles in the pseudo molecule of a remote contact groupis 2l2 − 3, and the number of bond angles in it is 2l2 − 2, and
2
by guest on June 21, 2015http://bioinform
atics.oxfordjournals.org/D
ownloaded from

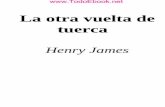
(a) Local contact group (b) Remote contact group
Fig. 1. Captured distances of local and remote contact groups: each circlerepresent a Cα atom, each solid line represent a pseudo bond between twoadjacent Cα atoms (captured implicitly in our distance vector), and eachdashed line represent a distance captured by our distance vector.
the number of bond lengths between non-adjacent Cα atoms in it is1. Thereafter, the dimension required to represent a remote contactgroup is (2l2 − 3) + (2l2 − 2) + 1 = 4l2 − 4 = 8. Note that thenumber of dimensions is proportional to the number of residues inthe contact group.
Given the desired number of dimensions, we create distancevectors to represent contact groups. Denote D(a, b) as the distancebetween two points a and b. Given a local contact group of a singleprotein structure fragment P1, P2, ..., Pl1, the distance vector isdefined as
V1 = D(Pi, Pi+g) | 1 ≤ i, i+ g ≤ l1, g = 2k, k ≥ 1.
For a remote contact group of a protein structure fragment pairP 1
1 , P12 , ..., P
1l2, P 2
1 , P22 , ..., P
2l2, we define the distance vector as:
V2 =
D(P 1i , P
1i+2) | 1 ≤ i, i+ 2 ≤ l2
D(P 2i , P
2i+2) | 1 ≤ i, i+ 2 ≤ l2
D(P 1i , P
2i+1) | 1 ≤ i < l2
D(P 2i , P
1i+1) | 1 ≤ i < l2
D(P 1l2, P 2
1 )D(P 2
l2, P 1
1 )
.
Here, V1 and V2 have 13 dimensions and 8 dimensions, respectively.In addition, our definition of V1 and V2 covers different types ofdistances (as shown in Figures 1(a) and 1(b)). One critical feature ofV1 and V2 is that if two contact groups have similar structures withlow RMSD, they should have similar pairwise distances (Holm andSander, 1993) and hence similar V1 or V2, as described in Section3.3.
The number of similar contact groups shared by two proteinscan be used as an indicator of their structure similarity. Here, weintroduce an index to efficiently find all contact groups that aresimilar to a query contact group in ContactLib by using a 13-by-256 table of bit vectors for a local ContactLib and an 8-by-256table of bit vectors for a remote ContactLib. Here, each row ofthe table represents a dimension of the distance vector. For eachdimension of the distance vector, the value space is discretized into256 bins, and each column represents a bin. Each element of thetable is a bit vector indicating if a contact group belongs to theassociated bin on the associated dimension for all contact groupsof the ContactLib. Then, these tables can be effectively used toretrieve the set of contact groups in a particular bin along a givendimension. Contact groups in m consecutive bins along a particular
dimension (or column) can be calculated by bitwise OR operations,and then contact groups in m consecutive bins along all dimensions(or rows) can be calculated by bitwise AND operations. Here, wecarefully choose a parameter m, such that contact groups similar tothe query contact group are within m bins from the query bins alongeach dimension.
To compare two structures, we introduce a combined hit-ratescore to rank and select protein structures in the search database.We observed that, for a pair of similar protein structures, most of thecontact groups for one structure tend to have similar contact groupsfrom the other structure. Conversely, for a pair of dissimilar proteinstructures, the opposite scenario was observed. These observationssuggest a combined hit-rate score for a pair of protein structures, asthe geometric mean of the similar contact group hit-rates of the twoprotein structures:
S =
√h1
n1
h2
n2,
where h1 is the number of hit contact groups for the first proteinstructure that have similar contact groups from the second proteinstructure, h2 is the number of hit contact groups for the secondprotein structure that have similar contact groups from the firstprotein structure, n1 is the number of contact groups for the firstprotein structure, and n2 is the number of contact groups for thesecond protein structure.
In summary, we find all pairs of neighbor contact groups betweenthe query protein structure and the search database using our indexesof ContactLib, and then we calculate the combined hit-rate scoreto rank and select protein structures in the search database. Let pbe the number of contact groups in a query, q be the number ofcontact groups in the database, and N be the number of structuresin the database. Recall that m is the number of consecutive binsthat defines similarity on a dimension of the distance vector, and l isthe dimension of the distance vector. For each query contact group,O(m) bitwise OR operations and O(l) bitwise AND operations areperformed, and each bitwise OR or AND operation takes O(q)time. Thus, the runtime complexity to find all similar contactgroup pairs between the query protein structure and the searchdatabase is O(pq(m + l)), and the combined hit-rate scores canbe calculated simultaneously. Moreover, the runtime complexityto rank structures according to the combined hit-rate scores isO(N logN). Therefore, the running time for our neighbor proteinstructure retrieval method is O(pqm+N logN). Here, the indexescan be pre-built, and the runtime complexity is not included.
3 RESULTFor performance analysis of our neighbor protein structure retrievalprogram, we used the high-quality protein structure subset ofSCOP30 1.75B (Murzin et al., 1995; Chandonia et al., 2004) thathas a minimum Summary PDB ASTRAL Check Index (SPACI)of 0.5. In this paper, we simply refer this dataset as SCOP30.Then, we built the local contact group library, ContactLib-9L,and the remote contact group library, ContactLib-3R, of SCOP30.For each protein structure of SCOP30, we retrieved its neighborprotein structures from the rest of SCOP30. For reference, thereare 3, 297 protein structures in SCOP30, 375, 299 local contactgroups in ContactLib-9L, and 6, 309, 469 remote contact groups inContactLib-3R.
3
by guest on June 21, 2015http://bioinform
atics.oxfordjournals.org/D
ownloaded from

To find neighbor protein structures of each query proteinstructure, we used SCOP (Murzin et al., 1995) and the bestalignment found by six popular protein structure alignment tools:DALI (Holm and Sander, 1993), CE (Shindyalov and Bourne,1998), LGA (Zemla, 2003), SSM (Krissinel and Henrick, 2004),TMalign (Zhang and Skolnick, 2005) and SPalign (Yang et al.,2012). Specifically, we considered two protein structures asneighbors if and only if both protein structures are from the sameSCOP super-family and the best pairwise structure alignment hasa structure alignment score (SAS) (Kolodny et al., 2005) below2.0A. Such neighbor protein structures tend to have globally similarstructures and functional features, but are not necessary to havesimilar sequences. Since different SCOP levels and SAS thresholdsconduct similar conclusions, we focus on the above neighbor proteinstructure definition in this paper. For the best alignments with SASbelow 2.0A, 50% are contributed by SPalign, 31% are contributedby LGA, and 16% are contributed by SSM.
The accuracy of neighbor protein structure retrieval is evaluatedby the area under the receiver operating characteristic (ROC) curve(AUROC), which has been used in many research areas (Fawcett,2006), including the protein structure alignment area (Kolodnyet al., 2005; Budowski-Tal et al., 2010). For instance, an AUROCof 0.9 means that a neighbor protein structure should be scoredhigher than a non-neighbor protein structure with a probability of0.9, and a random method have an AUROC equal to 0.5. Whenthe query protein structure does not have any neighbor proteinstructures in SCOP30, the AUROC is not defined. Thus, such casesare eliminated in our analysis.
3.1 General ROC Curve AnalysisIn this experiment, we demonstrate that ContactLib significantlyoutperforms FragBag for the neighbor protein structure retrievalproblem in terms of AUROC. For ContactLib-9L and ContactLib-3R, we tested m ∈ 2, 4, 8, 16, 32, 64 (recall that m is the numberof neighboring bins we should use around the query bin alongeach dimension). For FragBag, we tested the bag-of-words datasetsof lengths between 9 and 12 and of all sizes from the FragBagwebsite (Budowski-Tal et al., 2010).
The AUROC of our combined hit-rate score, using ContactLib-9L and ContactLib-3R, are shown in Figure 2(a). We see thatthe best accuracy of ContactLib-9L is achieved when m = 32,where the average AUROC is 0.876. Moreover, the best accuracyof ContactLib-3R is achieved when m = 8, where the averageAUROC is 0.956. Thus, the best result for ContactLib-3R is9% more accurate on average than that for ContactLib-9L. Thisindicates that remote contacts carry critical information that is notcarried by local contacts, and are capable of identifying neighborprotein structures more accurately.
The AUROC of the neighbor protein structure retrieval whichdefined on different SAS thresholds are also shown in Figure 2(a).Specifically, when the SAS threshold of 3.5A is used, the bestaverage AUROC’s of ContactLib-3R and ContactLib-9L are 0.918and 0.819, respectively; when the SAS threshold of 5.0A is used,the best average AUROC’s of ContactLib-3R and ContactLib-9Lare 0.906 and 0.804. Moreover, the AUROC of the neighbor proteinstructure retrieval which defined on different SCOP levels are usedin our experiment but not shown here. Although the results areslightly different, our neighbor protein structure retrieval method,
0
0.2
0.4
0.6
0.8
1
2 4 8 16 32 64
Are
a U
nder
RO
C C
urve
m
ContactLib-3R,SAS<2.0ContactLib-3R,SAS<3.5ContactLib-3R,SAS<5.0ContactLib-9L,SAS<2.0ContactLib-9L,SAS<3.5ContactLib-9L,SAS<5.0
(a) ContactLib
0
0.2
0.4
0.6
0.8
1
100 200 400 600
Are
a U
nder
RO
C C
urve
FragBag Size
FragBag-09-COSFragBag-09-EUCFragBag-10-COSFragBag-10-EUCFragBag-11-COSFragBag-11-EUCFragBag-12-COSFragBag-12-EUC
(b) FragBag
Fig. 2. ROC curve analysis: (a) the highest average AUROC is 0.876 whenthe ContactLib-9L with m = 32 is used; the highest average AUROC is0.956 when the ContactLib-3R with m = 8 is used; (b) the highest averageAUROC is 0.747 when the FragBag with an Euclidean distance function, afragment length of 10 and a bag size of 100 is used.
with either a local or a remote contact group library, is alwayscapable of delivering high accuracies with high AUROC’s.
We also combined ContactLib-9L and ContactLib-3R to retrieveneighbor protein structures from SCOP30 (Murzin et al., 1995;Chandonia et al., 2004). This is done by linearly combiningthe score for ContactLib-9L with m = 32 and the score forContactLib-3R with m = 8. When a weight of 1 : 16 is usedbetween ContactLib-9L and ContactLib-3R, the average AUROC isimproved slightly to the highest value of 0.960. Thus, ContactLib-3R contributes more than ContactLib-9L to deliver more accurateresults.
For comparison, we tested bag-of-words for FragBag (Budowski-Tal et al., 2010) with different fragment lengths and bag sizesas shown in Figure 2(b). Different experiment settings, suchas eliminating the query protein structures that do not haveany neighbor protein structures in SCOP30, lead to a few newobservations. First, the Euclidean distance function performssignificantly more accurately than the cosine distance function.Moreover, the choice of FragBag, with different fragment lengths or
4
by guest on June 21, 2015http://bioinform
atics.oxfordjournals.org/D
ownloaded from

different sizes, has no significant impact on the accuracy obtained.According to our result, the optimal FragBag is the one with anEuclidean distance function, a fragment length of 10 and a bag sizeof 100, that has an average AUROC of 0.747.
By comparing Figures 2(a) and 2(b), we find that our ContactLiboutperforms FragBag (Budowski-Tal et al., 2010) in terms ofAUROC. This is further supported by looking at the AUROCdistributions of ContactLib and FragBag in Figure 3. Specifically,when ContactLib-3R is used, 75% of the AUROC’s are higherthan 0.936, and the lowest AUROC is 0.504. When ContactLib-9L is used, 75% of the AUROC’s are higher than 0.823, and 3%of the AUROC’s are lower than 0.5. However, when FragBag isused, 75% of the AUROC’s are higher than 0.657, and 10% of theAUROC’s are lower than 0.5. Recall that a random method have anAUROC equals to 0.5. Although FragBag is capable of deliveringgood average accuracy, the worst case may not be acceptable formany accuracy sensitive applications. In our experiment, the worst-case AUROC is significantly improved by using ContactLib, andContactLib-3R is even able to guarantee an AUROC which is higherthan a random method.
Therefore, the best accuracy is archived when ContactLib-3Rwith m = 8 is used. If only the top three ranked protein structuresaccording to our combined hit-rate score are considered, there isa probability of 58% that we found at least one neighbor proteinstructure. The probability is increased to 73% when only the topten are considered. The excellent result suggests that ContactLib-3Rcan be used as a highly accurate and efficient filter to remove mostunrelated protein structures while keeping many neighbor proteinstructures.
3.2 ROC Curve Analysis of All-α and All-β ProteinsTo understand the influence of secondary structure to the neighborprotein structure retrieval problem, we studied the AUROC of thoseall-α and all-β query protein structures in the previous section. Fromthe 1574 query protein structures in the previous section, there are157 all-α protein structures and 313 all-β protein structures.
The AUROC’s of our neighbor protein structure retrieval withContactLib-3R and ContactLib-9L for m ∈ 2, 4, 8, 16, 32, 64are shown in Figure 4. Comparing the AUROC’s of all-α andthose of all-β query protein structures, the AUROC’s of all-α queryprotein structures tend to be higher. Comparing the AUROC’s ofContactLib-9L and ContactLib-3R, the impact on the type of queryprotein structures is significantly smaller when ContactLib-3R isused. This is because our remote contact groups are also capableof modeling hydrogen bonds in α-helices. However, local contactgroups are incapable of modeling hydrogen bonds in β-strands.
Therefore, the neighbor protein structure retrieval problem forall-β query protein structures is more challenging than that forall-α query protein structures, and incorporating remote contactinformation is critical to produce accurate results consistently forall-α and all-β query protein structures.
3.3 Correlation Analysis of Distance FunctionsIn this experiment, we demonstrated that if two contact groupshave similar structures of low RMSD values, they tend to havesimilar distance vectors (defined in Section 2). This was done bystudying the correlations among RMSD, the Euclidean distancebetween distance matrices D(M), and the Euclidean distance
0.0 0.2 0.4 0.6 0.8 1.0Area Under ROC Curve
10-1
100
101
102
103
104
Coun
t (log-scale)
(a) ContactLib-3R
0.0 0.2 0.4 0.6 0.8 1.0Area Under ROC Curve
100
101
102
103
Coun
t (log-scale)
(b) ContactLib-9L
0.0 0.2 0.4 0.6 0.8 1.0Area Under ROC Curve
100
101
102
103
Coun
t (log-scale)
(c) FragBag
Fig. 3. AUROC distributions (the AUROC of a random method equals to0.5): (a) when ContactLib-3R is used, 75% of the AUROC’s are higher than0.936, and the lowest AUROC is 0.504; (b) when ContactLib-9L is used,75% of the AUROC’s are higher than 0.823, and 3% of the AUROC’s arelower than 0.5; (c) when FragBag is used, 75% of the AUROC’s are higherthan 0.657, and 10% of the AUROC’s are lower than 0.5.
5
by guest on June 21, 2015http://bioinform
atics.oxfordjournals.org/D
ownloaded from

0
0.2
0.4
0.6
0.8
1
2 4 8 16 32 64
Are
a U
nder
RO
C C
urve
m
ContactLib-3R,all-alphaContactLib-9L,all-alphaContactLib-3R,all-betaContactLib-9L,all-beta
Fig. 4. ROC curve analysis of all-α and all-β query protein structures: theAUROC’s of all-α query protein structures tend to be higher than thoseof all-β query protein structures; the impact on the type of query proteinstructures is significantly smaller when ContactLib-3R is used than whenContactLib-9L is used.
between distance vectors D(V ). The data shown in Figure 5 wascollected from similar local contact groups, with RMSD less than2.0A, from 100 random pairs of proteins, such that each pair ofproteins belonged to the same SCOP domain.
From Figure 5(a), we find a strong correlation between D(V ) andD(M) for local contact groups with RMSD less than 2.0A. Thisis also true for remote contact groups. Specifically, the correlationcoefficients are 0.98 and 0.96, between D(V ) and D(M) of localand remote contact groups, respectively. Therefore, our distancevector is as good as the distance matrix, which is used by thepopular and successful pairwise protein structure alignment tool,DALI (Holm and Sander, 1993), to capture similar contact groups.
Although both of RMSD and pairwise distance matrix havebeen shown to be capable of capturing similarities between proteinstructures, they are not required to have strong correlations. Thisis also supported by our results. From Figure 5(b), we find thatsmall values of D(V ) suggest small values of RMSD among localcontact groups. Specifically, the correlation coefficient is 0.92between D(V ) and RMSD between local contact groups. However,neither D(V ) nor D(M) has such strong correlations to RMSDbetween remote contact groups, and the correlation coefficients areapproximately 0.6.
3.4 Running TimeOur protein neighbor retrieval program is not only accurate, butit is also fast. On a computer with an Intel(R) Core(TM) i72.80GHz CPU, both of our program with ContactLib-9L andFragBag (Budowski-Tal et al., 2010) finishes in less than a second.With ContactLib-3R, our program finishes in 5.1 seconds onaverage on the same computer. Here, we assumed that our programwas in server mode, such that both ContactLib-9L and ContactLib-3R were loaded in memory only once. For reference, note that theContactLib-9L binary file has a size of 43MB and the ContactLib-3R binary file has a size of 494MB. Therefore, when retrievingneighbor protein structures, ContactLib is capable of delivering
0 5 10 15D(M)
0
1
2
3
4
5
6
7
D(V)
(a) D(V ) v.s. D(M)
0.0 0.5 1.0 1.5 2.0RMSD
0
1
2
3
4
5
6
7
D(V)
(b) D(V ) v.s. RMSD
Fig. 5. Correlation analysis among root mean square deviation (RMSD),D(M) and D(V ) of local contact groups, where RMSD is less than 2.0A,D is the Euclidean distance function, M is the distance matrix used by DALIand V is our distance vector: (a) the correlation coefficient is 0.98 betweenD(V ) and D(M); (b) the correlation coefficient is 0.92 between D(V ) andRMSD.
a significantly faster running time than pairwise protein structurealignment tools are, with little compromise in accuracy.
4 DISCUSSIONIn conclusion, we have shown that ContactLib is an effectiveand efficient neighbor protein structure retrieval method. Mostimportantly, ContactLib was able to maintain a consistent levelof accuracy in our tests. The key to consistently retrieve accurateneighbor protein structures for all-β query protein structures isincorporating remote contact information in ContactLib. This isunmatched by existing neighbor protein structure retrieval method,FragBag (Budowski-Tal et al., 2010).
6
by guest on June 21, 2015http://bioinform
atics.oxfordjournals.org/D
ownloaded from

(a) Extended ContactLib (b) TMalign
Fig. 6. Pairwise protein structure alignment between SCOP proteinsd2cufa1 (red) and d3k2aa (blue): (a) our alignment with a TM-score of0.81797, an RMSD of 1.03, and an alignment length of 50; (b) TMalignalignment with a TM-score of 0.52190, an RMSD of 2.49, and an alignmentlength of 49.
However, our method can be improved in several ways. Onepossibility is to discover and study new types of contact groups. Wewill look for new definitions of distance vectors representing remotecontact groups based on free energies (Zhou and Zhou, 2002).Another promising extension of ContactLib would be to use contactgroups to improve pairwise protein structure alignment tools, suchas TMalign (Zhang and Skolnick, 2005). One such case is providedin Figure 6, which shows two alignments between SCOP proteinsd2cufa1 and d3k2aa , drawn by The PyMOL molecular graphicssystem (Schrodinger, LLC, 2010). The alignment shown in Figure6(b) was found by TMalign, and the alignment shown in Figure6(a) was found by our neighbor protein structure retrieval methodwith two extra steps. First, we clustered the rotation and transitionmatrices that yield the RMSD of similar contact groups betweenSCOP proteins d2cufa1 and d3k2aa , found by our neighbor proteinstructure retrieval method. Second, we used the representativerotation and transition matrix of the largest cluster to generate thealignment.
We will also look for new applications for ContactLib. Onepromising application for ContactLib is the “structural BLAST”approach of PrePPI (Dey et al., 2013), whose performance dependsmainly on the accuracy and on the speed of its neighbor proteinstructure retrieval. Moreover, ContactLib is also capable of findingneighbor protein structures if the query protein structure is onlypartially known in the process of protein structure prediction (Zhanget al., 2010) or determination (Wuthrich, 1990). Then, ContactLibmay employ the incomplete Cα − Cα pairwise distance matrix tofind template candidates to enable it to predict or to determine thequery protein structure.
Acknowledgments: This work was supported by a Startup Grantat City University of Hong Kong [7002731], an NSERC Grant[OGP0046506], the Canada Research Chair program, an NSERCCollaborative Grant, OCRiT, the Premier’s Discovery Award, theKillam Prize, and SHARCNET.
REFERENCESAkutsu, T. (1996). Protein structure alignment using dynamic programing and iterative
improvement. IEICE TRANSACTIONS on Information and Systems, 79(12), 1629–1636.
Aung, Z. and Tan, K.-L. (2007). Rapid retrieval of protein structures from databases.Drug Discovery Today, 12(17-18), 732–739.
Budowski-Tal, I., Nov, Y., and Kolodny, R. (2010). FragBag, an accurate representationof protein structure, retrieves structural neighbors from the entire PDB quickly andaccurately. Proceedings of the National Academy of Sciences, 107(8), 3481–3486.
Canutescu, A. A., Shelenkov, A. A., and Dunbrack, R. L. (2003). A graph-theoryalgorithm for rapid protein side-chain prediction. Protein Science, 12(9), 2001–2014.
Chandonia, J.-M., Hon, G., Walker, N. S., Conte, L. L., Koehl, P., Levitt, M., andBrenner, S. E. (2004). The astral compendium in 2004. Nucleic acids research,32(suppl 1), D189–D192.
Choi, I.-G., Kwon, J., and Kim, S.-H. (2004). Local feature frequency profile: a methodto measure structural similarity in proteins. Proceedings of the National Academyof Sciences of the United States of America, 101(11), 3797–3802.
Cui, X., Li, S. C., Bu, D., Alipanahi, B., Li, M., et al. (2013). Protein structureidealization: How accurately is it possible to model protein structures with dihedralangles? Algorithms for Molecular Biology, 8, 5.
Dey, F., Cliff Zhang, Q., Petrey, D., and Honig, B. (2013). Toward a structural blast:Using structural relationships to infer function. Protein Science.
Engh, R. A. and Huber, R. (2006). Structure quality and target parameters,volume F of International Tables for Crystallography, chapter 18.3, pages 382–416.International Union of Crystallography.
Fawcett, T. (2006). An introduction to roc analysis. Pattern Recogn. Lett., 27(8),861–874.
Guntert, P. and Wuthrich, K. (1991). Improved efficiency of protein structurecalculations from nmr data using the program diana with redundant dihedral angleconstraints. Journal of biomolecular NMR, 1(4), 447–456.
Holm, L. and Sander, C. (1993). Protein Structure Comparison by Alignment ofDistance Matrices. Journal of Molecular Biology, 233(1), 123–138.
Kolodny, R. and Linial, N. (2004). Approximate protein structural alignment inpolynomial time. Proceedings of the National Academy of Sciences of the UnitedStates of America, 101(33), 12201–12206.
Kolodny, R., Koehl, P., and Levitt, M. (2005). Comprehensive Evaluation ofProtein Structure Alignment Methods: Scoring by Geometric Measures. Journalof Molecular Biology, 346(4), 1173–1188.
Krissinel, E. and Henrick, K. (2004). Secondary-structure matching (ssm), a new toolfor fast protein structure alignment in three dimensions. Acta CrystallographicaSection D: Biological Crystallography, 60(12), 2256–2268.
Li, S. C., Bu, D., Xu, J., and Li, M. (2008). Fragment-HMM: a new approach to proteinstructure prediction. Protein Science, 17(11), 1925–1934.
Maadooliat, M., Gao, X., and Huang, J. Z. (2012). Assessing protein conformationalsampling methods based on bivariate lag-distributions of backbone angles. Briefingsin Bioinformatics.
Murzin, A. G., Brenner, S. E., Hubbard, T., and Chothia, C. (1995). SCOP: a structuralclassification of proteins database for the investigation of sequences and structures.Journal of molecular biology, 247(4), 536–540.
Orengo, C. A., Michie, A. D., Jones, S., Jones, D. T., Swindells, M. B., and Thornton,J. M. (1997). CATH–a hierarchic classification of protein domain structures.Structure (London, England : 1993), 5(8), 1093–1108.
Rice, L. M. and Brunger, A. T. (1994). Torsion angle dynamics: Reduced variableconformational sampling enhances crystallographic structure refinement. Proteins:Structure, Function, and Genetics, 19(4), 277–290.
Schrodinger, LLC (2010). The PyMOL molecular graphics system, version 1.3r1.Shindyalov, I. N. and Bourne, P. E. (1998). Protein structure alignment by incremental
combinatorial extension (CE) of the optimal path. Protein engineering, 11(9), 739–747.
Simons, K. T., Kooperberg, C., Huang, E., and Baker, D. (1997). Assembly of proteintertiary structures from fragments with similar local sequences using simulatedannealing and Bayesian scoring functions. J Mol Biol, 268(1), 209–225.
Wuthrich, K. (1990). Protein structure determination in solution by nmr spectroscopy.Journal of Biological Chemistry, 265(36), 22059–22062.
Yang, Y., Zhan, J., Zhao, H., and Zhou, Y. (2012). A new size-independentscore for pairwise protein structure alignment and its application to structureclassification and nucleic-acid binding prediction. Proteins: Structure, Function,and Bioinformatics, 80(8), 2080–2088.
Zemla, A. (2003). Lga: a method for finding 3d similarities in protein structures.Nucleic acids research, 31(13), 3370–3374.
Zhang, J., Wang, Q., Barz, B., He, Z., Kosztin, I., Shang, Y., and Xu, D. (2010).Mufold: a new solution for protein 3d structure prediction. Proteins: Structure,Function, and Bioinformatics, 78(5), 1137–1152.
Zhang, Y. and Skolnick, J. (2005). TM-align: a protein structure alignment algorithmbased on the TM-score. Nucleic Acids Res, 33(7), 2302–2309.
Zhou, H. and Zhou, Y. (2002). Distance-scaled, finite ideal-gas reference stateimproves structure-derived potentials of mean force for structure selection andstability prediction. Protein science, 11(11), 2714–2726.
7
by guest on June 21, 2015http://bioinform
atics.oxfordjournals.org/D
ownloaded from
Copyright © 2022 FDOKUMEN