Proposed Redesign and Analysis of BMW X3 Side View Mirror
16
Mechanical Vibrations Course no. MAE 4024 Section: 01 Instructor: Dr. Beshoy Morkos Term Project: Proposed Redesign and Analysis of BMW X3 Side View Mirror Report Due: 11/03/2013 By: Omar Galil Toluwalase Olajoyegbe
Transcript of Proposed Redesign and Analysis of BMW X3 Side View Mirror
Mechanical Vibrations
Course no. MAE 4024
Section: 01
Instructor: Dr. Beshoy Morkos
Term Project: Proposed Redesign and Analysis of BMW X3 Side View Mirror
Report Due: 11/03/2013
By:
Omar Galil
Toluwalase Olajoyegbe

Abstract
The BMW X3 SAV has developed some characteristics that have proven to be an inconvenience
to customers. It has been reported that the mirrors are emitting unpleasant noise and also exhibit
some misalignment over a period of time. The following report gives an analytical report of the
current system while pinpointing some of its likely issues, and a detailed outline of the proposed
solution, which will address the problem while inquiring minimal cost in the event of a recall.

Table of Contents
Abstract ........................................................................................................................................ i
Introduction ..................................................................................................................................... 2
Executive Summary ........................................................................................................................ 2
Methodology/Approach .................................................................................................................. 3
Sample Calculations ................................................................................................................... 5
Conclusion .................................................................................................................................... 10
Appendix A Original System CAD Drawing ............................................................................. 11
Appendix B Modified System CAD Drawing ............................................................................ 12
Appendix C Matlab Code .......................................................................................................... 13

2
Introduction
As technology has advanced, machinery has gotten quicker, more precise and reliable. But with
these advancements have come new problems which must be solved with the arrival of more
advanced high performance mechanical systems. The major effects in these systems are of
vibrational origin. It is evident that, as engineers, the analysis of a system or the parts it consists
of, cannot simply end once the safety factors of each part is below a particular threshold. The
study of the system must also be stable when exposed to frequencies to which the parts operate
at. Improper analysis of these systems could lead to a wide variety of issues from unpleasant
noise to a completely instable system. Through the years of design development, engineers have
witnessed bolts in automotive transmission falling out and even the destruction of bridges due to
the fact that they were not designed to operate at frequencies they were exposed to.
The following analysis preformed in the report applies some knowledge about vibrational
systems to help stabilize an issue with one of BMWs’ OEM parts.
Executive Summary
The problem statement laid out in this project was to modify the side mirror system of a BMW
X3 vehicle. The path taken to approach this dilemma was based upon checking, first, the
accuracy of the given data; then, constructing a set of equations to explain the system and hence
allowing the team to attempt modification suggestions. The equations of force was chosen by
this team in the aim of creating a simple way of understanding the system; in addition, it assisted
in looking at the separate parts of the system simultaneously and focus on how they vary based
on the alterations taking place.
The sample calculations are presented in the Methodology section while the detailed analysis is
provided in the appendices section in the back of this report. The graphs that show the response
of both the current system and the modified suggestion have produced using MATLAB coding.
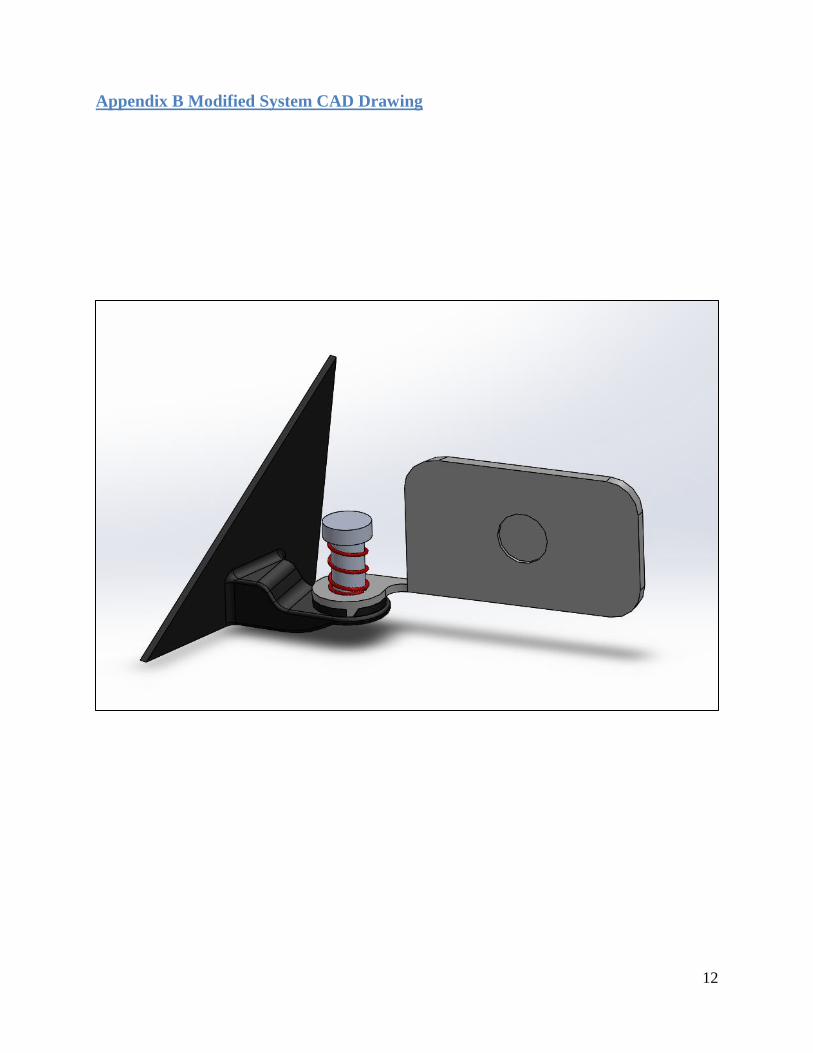
Furthermore, the team presented a CAD model of the system using SolidWorks, providing the
detailed drawings as well.
3
Methodology/Approach
The analysis of the system began with acquiring a suitable weight for the side few mirrors. From
the resources acquired on the internet it was estimated that the mass of the system under load
would be about 2.75lb. All work within this report has been converted to SI units as was
preferable to the team and analysis.
The first step in this particular analysis was to determine the x, y and z components of the
telemetry data and find the effective ratio between these three values to the original spring. The
spring equivalents in the corresponding axis were by using the table supplied to us in the
preliminary analysis data.
It was discovered that there was an error within the preliminary analysis was the fact that the
modulus of rigidity was 11.6Mpa was actually a psi. We accounted for this mistake and
converted our given value to metric unit (pa). This gave a Modulus of Rigidity of 79.98Gpa. The
Physical spring constant was found using the following equation and gave the corresponding
result:
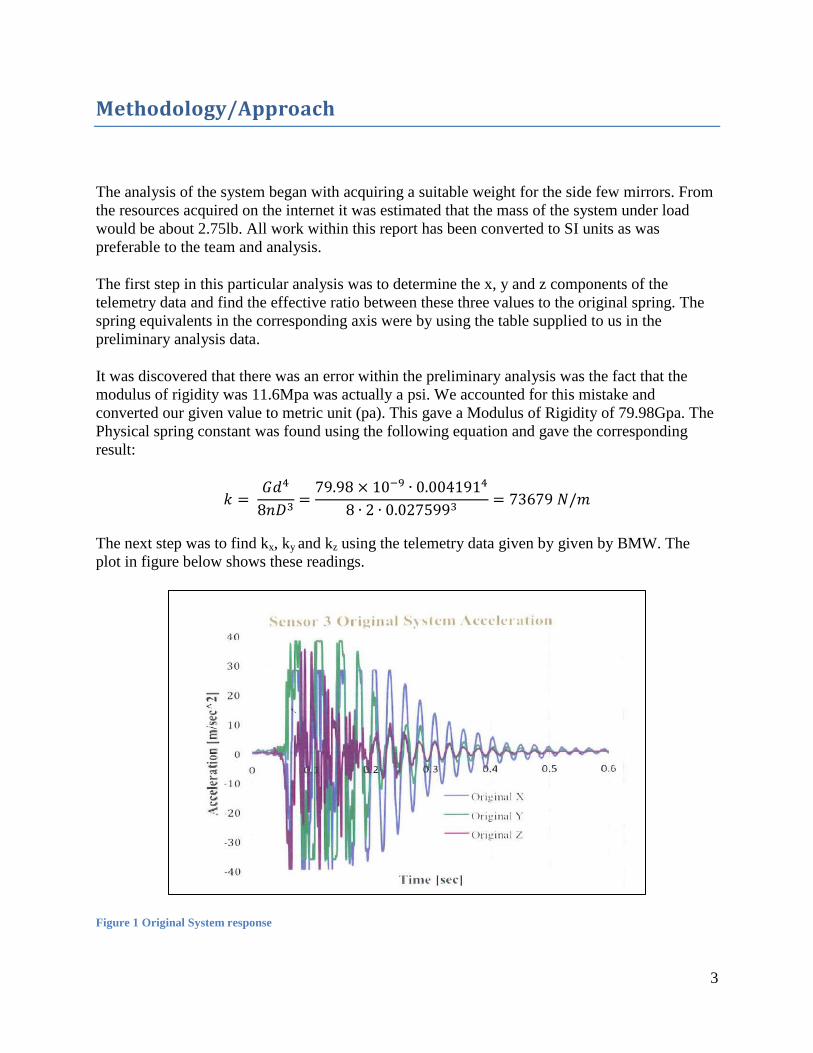
The next step was to find kx, ky and kz using the telemetry data given by given by BMW. The
plot in figure below shows these readings.
Figure 1 Original System response
4
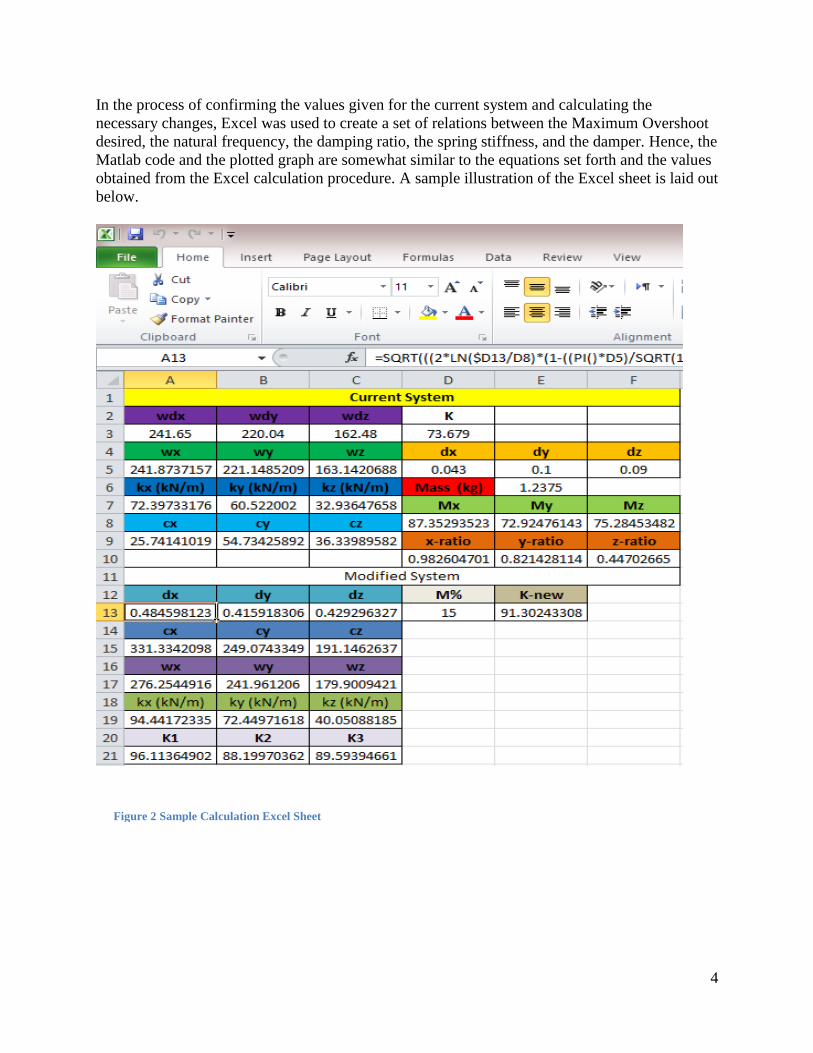
In the process of confirming the values given for the current system and calculating the
necessary changes, Excel was used to create a set of relations between the Maximum Overshoot
desired, the natural frequency, the damping ratio, the spring stiffness, and the damper. Hence, the
Matlab code and the plotted graph are somewhat similar to the equations set forth and the values
obtained from the Excel calculation procedure. A sample illustration of the Excel sheet is laid out
below.
Figure 2 Sample Calculation Excel Sheet
5
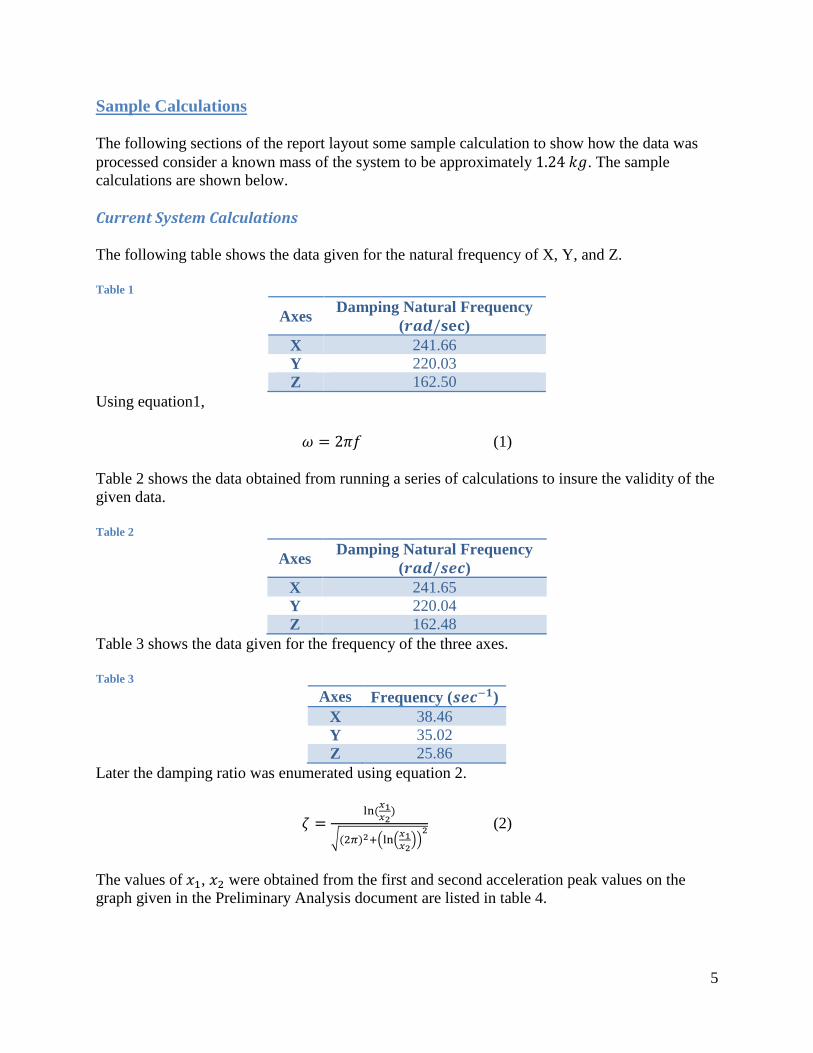
Sample Calculations
The following sections of the report layout some sample calculation to show how the data was
processed consider a known mass of the system to be approximately . The sample
calculations are shown below.
Current System Calculations
The following table shows the data given for the natural frequency of X, Y, and Z.
Table 1
Axes Damping Natural Frequency
( ) X 241.66
Y 220.03
Z 162.50
Using equation1,
(1)
Table 2 shows the data obtained from running a series of calculations to insure the validity of the
given data.
Table 2
Axes Damping Natural Frequency
( )
X 241.65
Y 220.04
Z 162.48
Table 3 shows the data given for the frequency of the three axes.
Table 3
Axes Frequency ( )
X 38.46
Y 35.02
Z 25.86
Later the damping ratio was enumerated using equation 2.
√ ( (
)) (2)
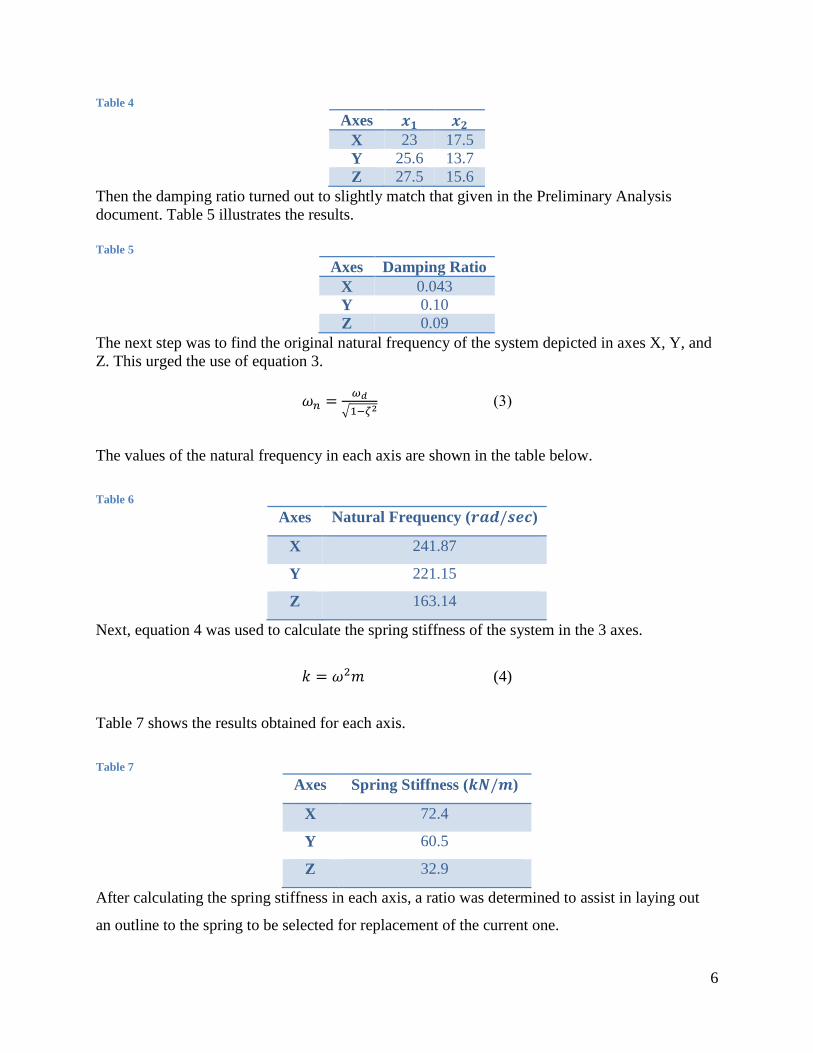
The values of , were obtained from the first and second acceleration peak values on the
graph given in the Preliminary Analysis document are listed in table 4.
6
Table 4
Axes
X 23 17.5
Y 25.6 13.7
Z 27.5 15.6
Then the damping ratio turned out to slightly match that given in the Preliminary Analysis
document. Table 5 illustrates the results.
Table 5
Axes Damping Ratio
X 0.043
Y 0.10
Z 0.09
The next step was to find the original natural frequency of the system depicted in axes X, Y, and
Z. This urged the use of equation 3.
√ 𝜁 (3)
The values of the natural frequency in each axis are shown in the table below.
Table 6
Axes Natural Frequency ( )
X 241.87
Y 221.15
Z 163.14
Next, equation 4 was used to calculate the spring stiffness of the system in the 3 axes.
(4)
Table 7 shows the results obtained for each axis.
Table 7
Axes Spring Stiffness ( )
X 72.4
Y 60.5
Z 32.9
After calculating the spring stiffness in each axis, a ratio was determined to assist in laying out
an outline to the spring to be selected for replacement of the current one.
7
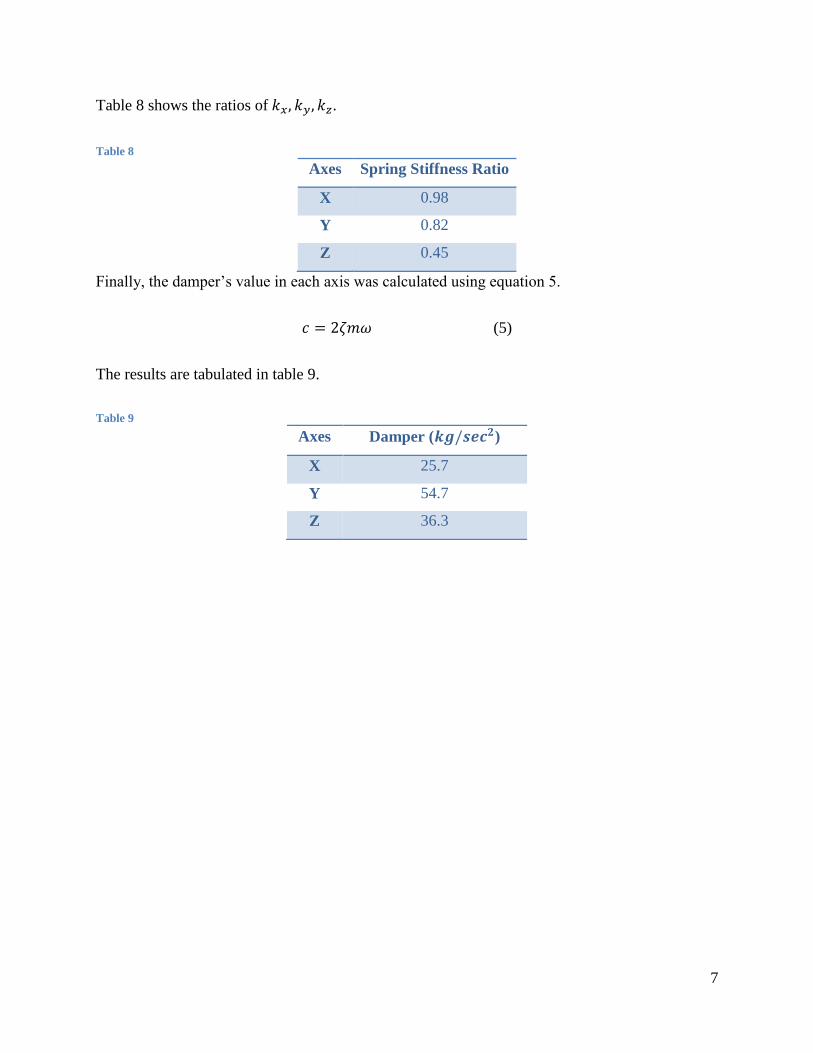
Table 8 shows the ratios of .
Table 8
Axes Spring Stiffness Ratio
X 0.98
Y 0.82
Z 0.45
Finally, the damper’s value in each axis was calculated using equation 5.
(5)
The results are tabulated in table 9.
Table 9
Axes Damper ( )
X 25.7
Y 54.7
Z 36.3
8
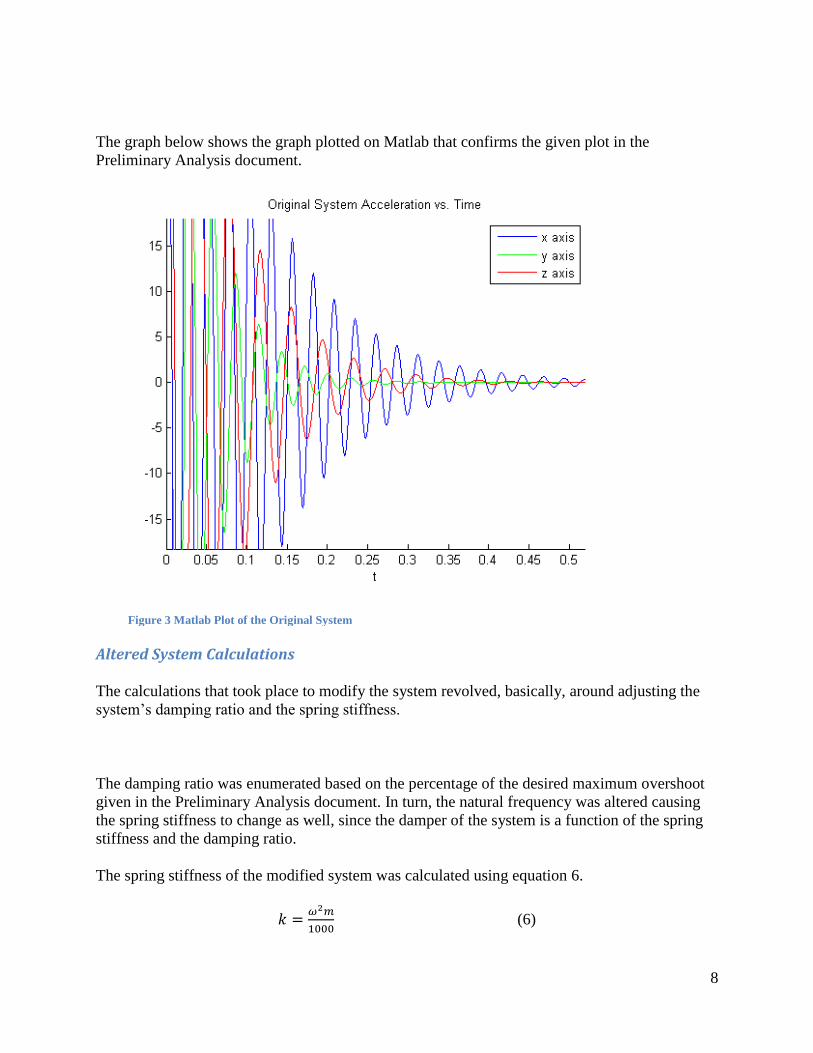
The graph below shows the graph plotted on Matlab that confirms the given plot in the
Preliminary Analysis document.
Altered System Calculations
The calculations that took place to modify the system revolved, basically, around adjusting the
system’s damping ratio and the spring stiffness.
The damping ratio was enumerated based on the percentage of the desired maximum overshoot
given in the Preliminary Analysis document. In turn, the natural frequency was altered causing
the spring stiffness to change as well, since the damper of the system is a function of the spring
stiffness and the damping ratio.
The spring stiffness of the modified system was calculated using equation 6.
(6)
Figure 3 Matlab Plot of the Original System
9
The values of the spring stiffness came out to be as follows:
Table 10
Axis Spring Stiffness ( )
X 94.4
Y 72.4
Z 40.1
Next, the values in table 10 were divided by the spring ratios obtained in table 8 resulting in a set
of values that were averaged to determine the new spring to be used in the modification design.
Table 11 lists those values along with the average.
Table 11
Spring Spring Rate ( )
96.11
88.20
89.59
Average 91.30
The value of the average spring rate corresponds to 521.35 . Hence, the spring chosen
from Mc Master that served the purpose of the modification was Steel Compression Spring,
Zinc-Plated Music Wire, 1.50" L, .970" OD, .080" Wire, product no. 9657K362 which had a
spring rate of . (4.6 ).
After multiplying the new spring with the ratios obtained for each axis, the values of
are presented in table 12.
Table 12
Axes Spring Rate (
)
X 4.52
Y 3.78
Z 2.06
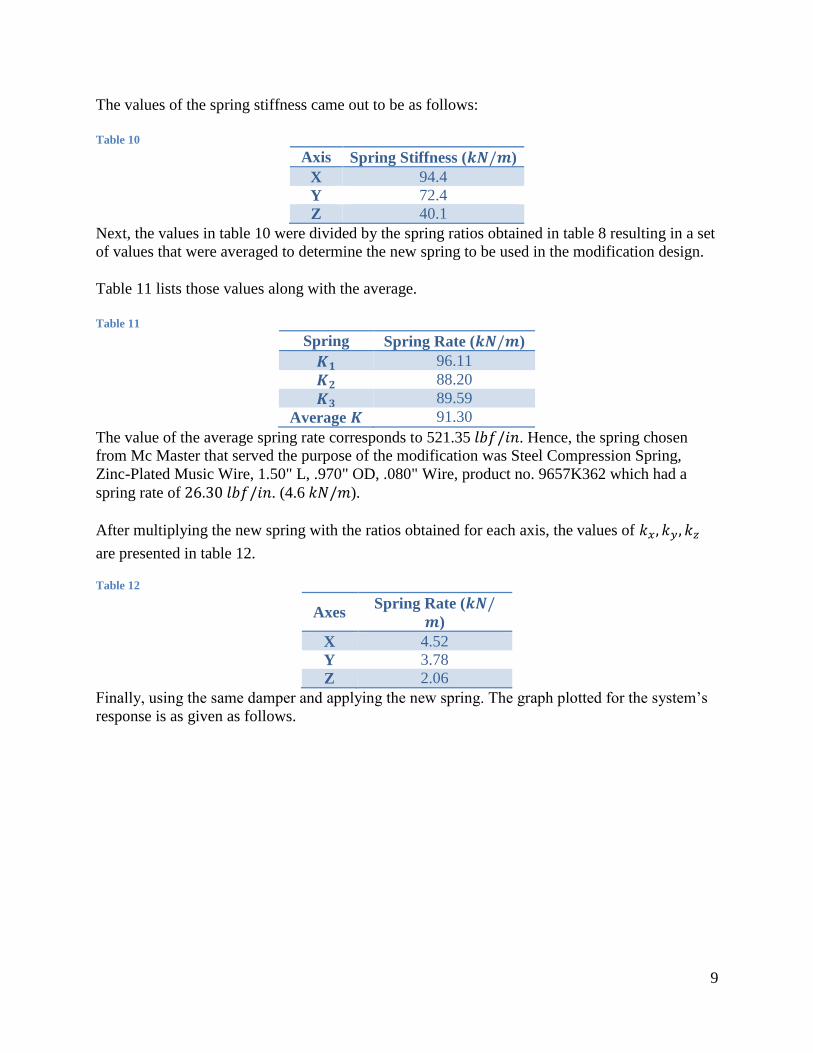
Finally, using the same damper and applying the new spring. The graph plotted for the system’s
response is as given as follows.
10
Figure 4 Matlab Plot of the Modified System Response
Conclusion
From the steps, that we have chosen to take, we found that the most efficient way to acquire the
vibrational response would be to reduce the spring constant. This made it possible to avoid
having to add a damping system within the new assembly. The total unit cost for replacing the
springs would be $9.13 per kilogram from Mcmaster Carr, which amounts to approximately
$0.09 per unit, which amounts to $0.18 per vehicle to which believe that this is an adequate route
to take.
11
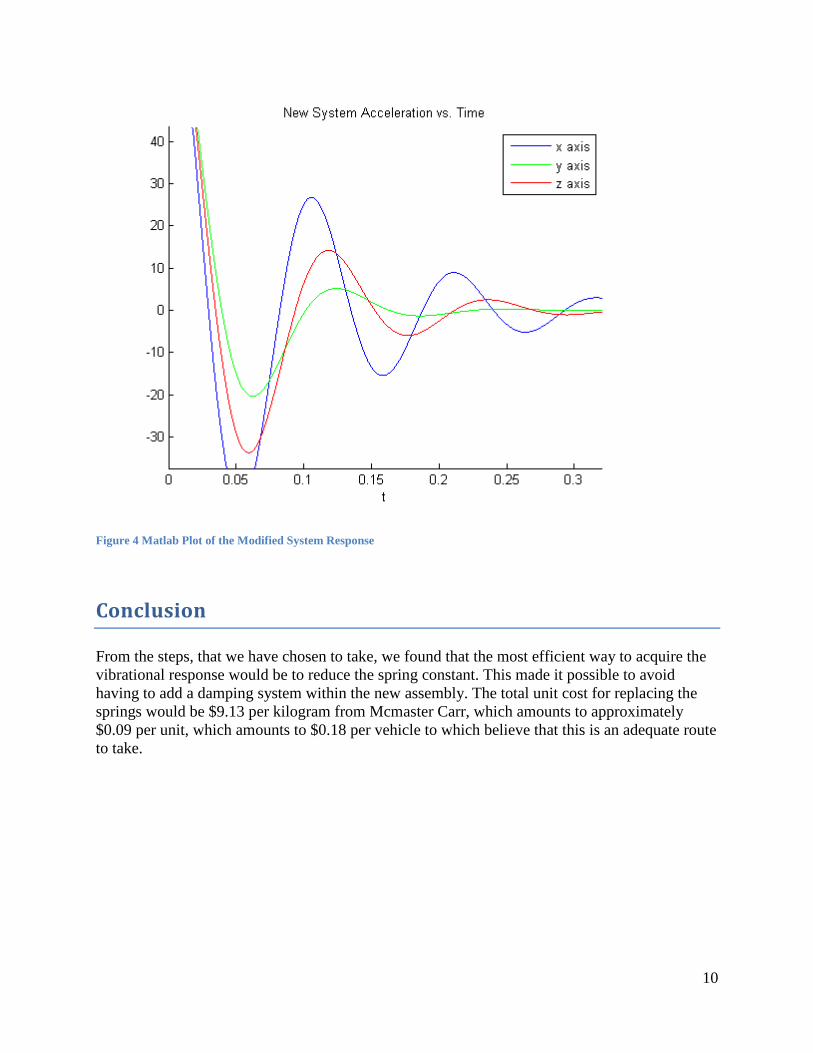
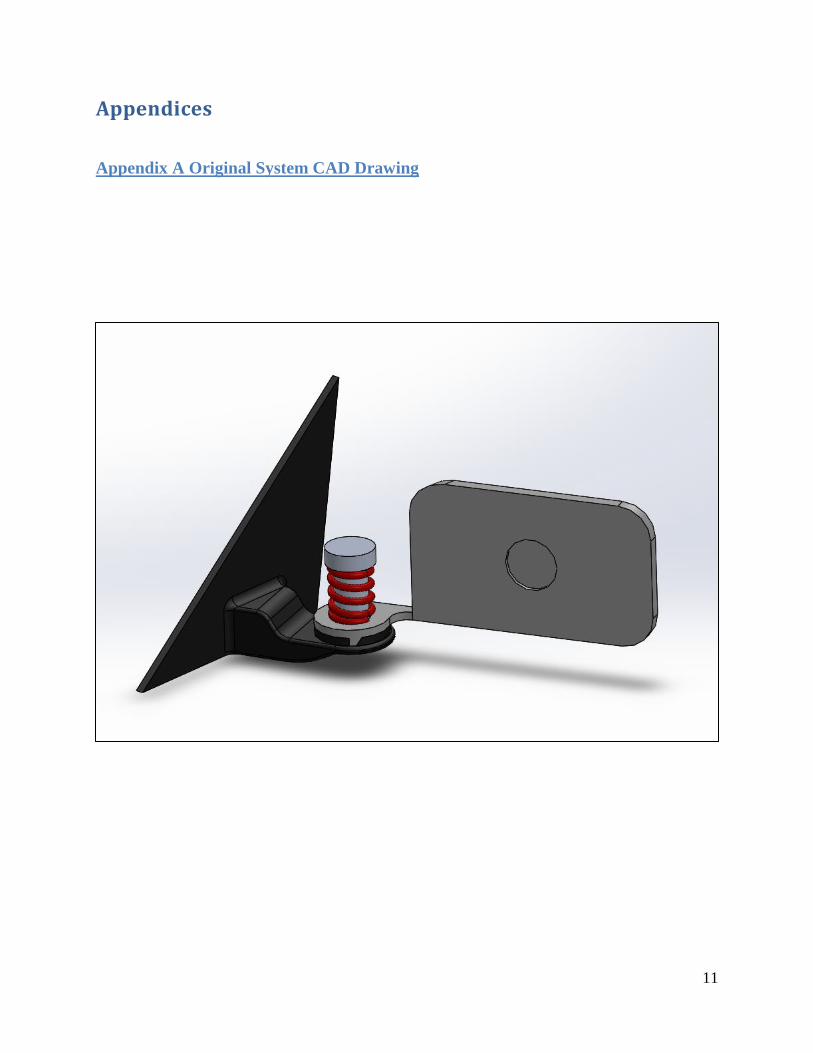
Appendices
Appendix A Original System CAD Drawing
12
Appendix B Modified System CAD Drawing
13
Appendix C Matlab Code % The following program has been written in order to analyze the vibration % within of the BMW X3 side view mirror. This Particular Portion of the % program simulates the original oscillations of the system. This particular % program also contains the altered design simulation. clear all close all clc
%Initial Design Parameters (Based on Analysis) %Linear Spring Properties (SI units) G = 79.98e9; d = 0.004191; n = 2; D = 0.027559; %Uncompressed spring D1 = 0.0337; %Compressed Spring D2 = 0.0229; %Geometrical Spring Constant Pk = (G*d^4)/(8*n*D^3);
%Equation of Motion with initial Values for x axis y1 = dsolve('1.24*D2y+25.74*Dy+72395.1*y=0','y(0)=80','Dy(0)=0')
%Equation of Motion with initial Values for y axis y2 = dsolve('1.24*D2y+54.73*Dy+60522.81*y=0','y(0)=80','Dy(0)=0')
%Equation of Motion with initial Values for z axis y3 = dsolve('1.24*D2y+36.34*Dy+32935.6*y=0','y(0)=80','Dy(0)=0')
hold on x = ezplot(y1,[0,0.52]) y = ezplot(y2,[0,0.52]) z = ezplot(y3,[0,0.52]) hold off% plots function
set(z,'color','r') set(y,'color','g') title('Original System Acceleration vs. Time') legend(x,'x axis') legend(y,'y axis') legend(z,'z axis') % end
syms a %define Variable syms b %define Variable syms c %define Variable
kn = 4605 %New spring constant average
a1 = 0.982604701*kn
14
b1 = 0.821428114*kn c1 = 0.821428114*kn
%Equation of Motion with initial Values for x axis y = dsolve('1.24*D2y+25.74*Dy+a*y=0','y(0)=80','Dy(0)=0') yy1 = subs(y, a, a1) %Substitutes a variabl with 1
%Equation of Motion with initial Values for y axis y = dsolve('1.24*D2y+54.73*Dy+a*y=0','y(0)=80','Dy(0)=0') yy2 = subs(y, a, b1) %Substitutes a variabl with 1
%Equation of Motion with initial Values for z axis y = dsolve('1.24*D2y+36.34*Dy+a*y=0','y(0)=80','Dy(0)=0') yy3 = subs(y, a, c1) %Substitutes a variabl with 1
figure (2)
hold on x = ezplot(yy1,[0,0.32]) y = ezplot(yy2,[0,0.32]) z = ezplot(yy3,[0,0.32]) hold off% plots function
set(z,'color','r') set(y,'color','g') title('New System Acceleration vs. Time') legend(x,'x axis') legend(y,'y axis') legend(z,'z axis')