Lista equivalente de SKF para líneas de procesamiento de ...
Upload
independentCategory
view
5download
0
1
Procesamiento de imágenes para la etapa de Segmentación en Sistemas de
Reconocimiento Biométrico del Iris Jaime O. Viridiana1 , Simancas A. Eric2 , Robles C. Daniel2.
1 Estudiante de la Maestría en TICs (Tecnologías de la Información y Comunicaciones), Universidad Politécnica de Pachuca, e-mail de contacto [email protected], 2 Profesores Investigadores de la Maestría en TICs,
Universidad Politécnica de Pachuca.
Resumen: Los sistemas biométricos basados en el reconocimiento de patrones biométricos utilizan
imágenes para extraer información significativa que servirá como patrón de reconocimiento; estos
sistemas requieren que las imágenes adquiridas sean lo más clara posible, pues de lo contrario el
desempeño de los sistemas biométricos es limitado. En los sistemas de reconocimiento del iris al
analizar imágenes de los ojos; nos encontramos con factores de ruido como las pestañas, los párpados y
las reflexiones que dificultan la segmentación y se convierten en problemas frecuentes que limitan el reconocimiento en los sistemas biométricos.
Para resolver esta problemática se analizaron técnicas que permiten lograr una segmentación del
iris discriminando las problemáticas antes mencionadas y así ayudar a desarrolladores de
sistemas biométricos en las fases posteriores a la segmentación con la confianza de haber obtenido
información significativa en esta etapa; además se presenta la evaluación de tales técnicas mediante
programas en MatLab aplicadas en imágenes obtenidas de la base de datos UBIRIS.v1. En el
presente trabajo se muestra un análisis del Algoritmo de Canny, CHT (Transformada de Hough Circular) y de un Algoritmo para la Detección de
Reflexiones, los cuales en su conjunto nos permiten realizar una buena segmentación del iris
(sin los factores de ruido mencionados anteriormente). Además se presentan los
resultados obtenidos al analizar las imágenes mediante el código en MatLab del Algoritmo de
Canny, CHT y Detección de Reflexiones; igualmente se describe la forma en que éstos fueron
desarrollados.
Palabras claves: biométria, mapa de bordes,segmentación.
I. INTRODUCCIÓN
Los sistemas biométricos basados en el reconocimiento del iris han tenido un gran
auge debido a su alta precisión en la identificación de personas, para lo cual se
requiere de imágenes con ciertas características, por ejemplo: que sean
nítidas, en escala de grises o a color, que se aprecie claramente el ojo humano, entre
otras. Frecuentemente en la imagen a utilizar, el iris está acompañado de
pestañas, párpados y reflexiones; todos estos son factores que influyen dentro de un sistema
biométrico y que pueden ser descartados mediante técnicas de procesamiento de imágenes, y en consecuencia obtener aquella sub-parte que sea únicamente iris; con esto,
además de evitar la adquisición de componentes no deseados se puede facilitar la
etapa de extracción de características en los sistemas biométricos, pues se cuenta con imágenes en las que se puede apreciar el iris
claramente. En las secciones posteriores se realiza el análisis y evaluación de técnicas
de procesamiento de imágenes que permitan lograr una segmentación del iris que sirva de
apoyo en las etapas de desarrollo de un sistema biométrico utilizando el iris. La
evaluación de las técnicas de procesamiento
Memorias del “2do. Congreso Nacional de Tecnologías de la Información”, Universidad del SABES, San José Iturbide, Gto., México, 29 y 30 de Agosto del 2014.

2
de imágenes utilizadas se realizó mediante el uso del programa de cómputo MatLab y la base de
datos UBIRIS.v1. En secciones posteriores se muestra un análisis de los algoritmos de
Canny, CHT y de un Algoritmo para la Detección de Reflexiones, los cuales en su conjunto nos
permitirán realizar una buena segmentación del iris (sin los factores de ruido
mencionados anteriormente). Además se presentan los resultados obtenidos de los
códigos de los algoritmos de Canny, CHT y Detección de Reflexiones; igualmente se
describe la forma en que éstos fueron desarrollados.
II. MÉTODOS
En este trabajo se utilizaron tres técnicas para la segmentación del iris y las
reflexiones presentes en una imagen, para ello fue necesario revisar la teoría de cada
una de las técnicas para segregar cada etapa de su desarrollo mediante el lenguaje de
simulación MatLab; al igual que se comprendió su funcionamiento para poder hacer las
modificaciones correspondientes a nuestras necesidades y proponer soluciones a la hora de
localizar el iris en imágenes de ojos de la Base de datos UBIRIS.v1: los algoritmos
analizados fueron: Algoritmo de Canny, CHT y un algoritmo para la Detección de
Reflexiones; los cuáles se explican acontinuación:
ALGORITMO DE CANNY El Algoritmo de Canny fue desarrollado por
John Canny en 1986 (Canny, 1986) , el cual nos permite detectar los bordes presentes en una imagen. Los bordes están formados por pixeles
entre los que existen cambios bruscos en los niveles de intensidad. Este algoritmo utiliza
la primera derivada, la cual toma el valor de cero en las regiones donde no varía la
intensidad de los pixeles y toma un valor constante en toda la transición de
intensidad. Un cambio de intensidad se manifiesta como un cambio brusco en la primera derivada, la detección de bordes reduce
significativamente la cantidad de datos a procesar. El Algoritmo de Canny consta de tres
etapas principales: cálculo del gradiente, supresión no máxima e histéresis de umbral
(Jaramillo, Fernández y Martínez, 2000), (Valverde, 2007).
A. Cálculo del Gradiente En esta etapa, primeramente, se aplica un
filtro gaussiano a la imagen de entrada para eliminar ruido; a esta operación se le conoce
como suavizado. Un suavizado excesivo causará que se pierdan detalles de la imagen y por lo
tanto, que haya problemas en la detección de bordes. Posteriormente se obtiene el
gradiente G de la imagen f(x, y) mediante la expresión (Valverde, 2007)
()
Después se calcula la magnitud y la orientación del gradiente para cada pixel a
través de las fórmulas (2) y (3), respectivamente (Tejedor, 2009), (Valverde,
2007)
|G|= ( G√ x ² + Gy ²) = |Gx |+ | Gy| () φ(x, y)= tan-1(Gy / Gx) ()
donde Gx es el gradiente en la dirección vertical y, por lo tanto, detecta los bordes
verticales; Gy es el gradiente en la dirección horizontal y detecta los bordes horizontales.
A partir de la magnitud y orientación del gradiente se obtienen dos imágenes: Em y Eo,
respectivamente; las cuales tienen utilidad en la etapa de Supresión no máxima.
B. Supresión No Máxima
Una vez obtenidas las imágenes Em y Eo de la fase anterior, el siguiente paso es
relacionar la orientación del gradiente (Eo) con una dirección que pueda ser trazada en una
imagen. Cada componente en Eo puede tener una de las cuatro direcciones posibles: 0°, 45°,
90° o 135° con respecto al eje horizontal;
Memorias del “2do. Congreso Nacional de Tecnologías de la Información”, Universidad del SABES, San José Iturbide, Gto., México, 29 y 30 de Agosto del 2014.
3
dependiendo de la dirección a la que esté más cerca. Después de que las direcciones son
conocidas, si cada elemento en Em es menor que al menos uno de sus vecinos en una dirección
determinada, entonces su valor es establecido a cero y ese pixel no es considerado como
candidato a borde; de otro modo, tal elemento sí es tomado en cuenta para formar parte del
borde. El resultado de esta supresión es la imagen In (Em ya con los valores establecidos a
cero) con los bordes adelgazados y que sirve como entrada para la siguiente etapa
(Tejedor, 2009), (Valverde, 2007).C. Histéresis de Umbral
En esta etapa se utilizan dos umbrales, uno superior (t2 ) y uno inferior (t1 ). Los elementos en In que tienen valores: mayores que
t2 , son considerados como borde definitivo; menores que t1 , son descartados como parte del
borde y son fondo definitivo; o menores que t2 y mayores que t1 , son considerados como borde siempre y cuando estén conectados a otros pixeles que ya son parte del borde (mayores
que t2 ). Todos los puntos que ya se cuentan como borde y como fondo forman una imagen final que
se llama Mapa de Bordes (Jaramillo et al., 2000), (Tejedor, 2009), (Valverde, 2007).
TRANSFORMADA DE HOUGH La Transformada de Hough es un algoritmo
que permite localizar figuras geométricas dentro de una imagen a través de una ecuación
paramétrica. La imagen de entrada es, generalmente, un mapa de bordes del cual se
obtienen las ecuaciones de las figuras que se desean encontrar. Todas las combinaciones de
valores de parámetros de la ecuación que representa la forma que se desea detectar en
la imagen constituyen el espacio paramétrico dónde se realizará la búsqueda. Si las formas
buscadas se describen mediante una ecuación con tres parámetros, entonces se tiene un
espacio de búsqueda tridimensional, como en el caso de un círculo. En la imagen se pude
detectar cualquier forma correspondiente a alguna de las combinaciones de parámetros
existentes en el espacio discretizado
(Escolano, Cazorla y Alfonso, 2003). Ya construido el espacio paramétrico se
establece qué combinaciones de parámetros tienen una mayor evidencia de pertenecer a una
forma existente en la imagen de entrada. Para hacer esto cada punto de la imagen vota por todas las ecuaciones correspondientes a formas a las que pertenezca dicho punto. Los votos son almacenados en un arreglo
acumulador, el cual contiene todas las combinaciones de los parámetros; el número
máximo de votos en el arreglo acumulador corresponde a los parámetros del círculo
buscado (Lodin, Ghiurcau y Lodin, 2010), por lo tanto, las formas que obtengan un mayor
número de votos serán aquellas que estarán dibujadas.
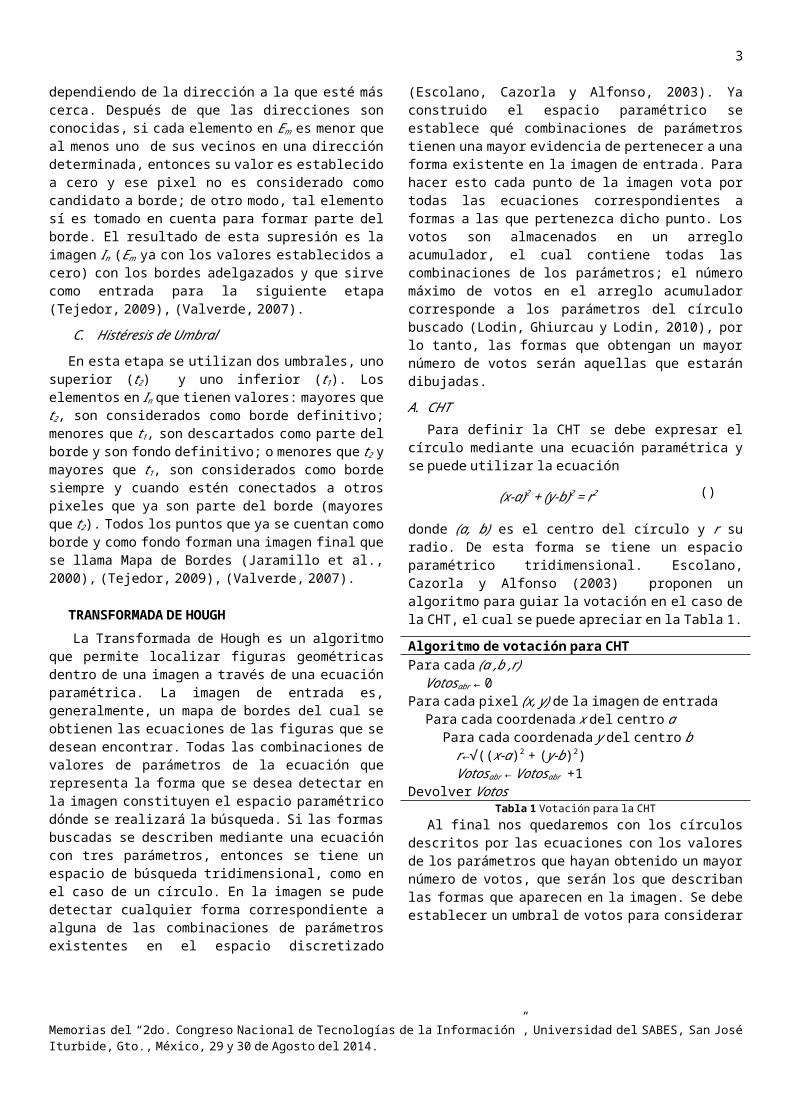
A. CHT Para definir la CHT se debe expresar el círculo mediante una ecuación paramétrica y
se puede utilizar la ecuación
(x-a)2 + (y-b) 2 = r2 ()
donde (a, b) es el centro del círculo y r su radio. De esta forma se tiene un espacio
paramétrico tridimensional. Escolano, Cazorla y Alfonso (2003) proponen un
algoritmo para guiar la votación en el caso de la CHT, el cual se puede apreciar en la Tabla 1.
Algoritmo de votación para CHT Para cada (a ,b ,r)
Votosabr ← 0 Para cada pixel (x, y) de la imagen de entrada
Para cada coordenada x del centro a Para cada coordenada y del centro b r←√((x-a)2 + (y-b)2) Votosabr ← Votosabr +1
Devolver Votos Tabla 1 Votación para la CHT
Al final nos quedaremos con los círculos descritos por las ecuaciones con los valores
de los parámetros que hayan obtenido un mayor número de votos, que serán los que describan
las formas que aparecen en la imagen. Se debe establecer un umbral de votos para considerar
Memorias del “2do. Congreso Nacional de Tecnologías de la Información”, Universidad del SABES, San José Iturbide, Gto., México, 29 y 30 de Agosto del 2014.

4
que un círculo existe en la imagen (Escolano et al., 2003), (Wildes, 1997).
ALGORITMO DE DETECCIÓN DE REFLEXIONES Para detectar reflexiones en una imagen se
debe comparar el valor de intensidad de un pixel con un umbral (ver expresión () ), si el valor del pixel es mayor que el umbral,
entonces ese pixel será considerado como
reflexión, de lo contrario será descartado como tal ( Zamudio, 2010):
donde f(x, y) es el valor de la intensidad del pixel y t es el valor del umbral; se propone
asignar al umbral un valor cercano a los tonosblancos.
III. RESULTADOS Se realizaron simulaciones del Algoritmo
de Canny, de la CHT y del Algoritmo de Detección de Reflexiones en MatLab utilizando
UBIRIS. Se tomaron como base tres imágenes de UBIRIS.v1 correspondientes a personas diferentes (ver Figura 1 ), con el fin de
observar el comportamiento de los algoritmos sobre el iris en circunstancias diversas.
Figura 1 Imágenes tomadas de UBIRIS.v1: a) Persona No. 1, b) Persona No. 2, y c) Persona No. 3.
ALGORITMO DE CANNY
A. Obtención del Gradiente A las imágenes de la Figura 1 se les aplicó
un filtro gaussiano para obtener la imagen suavizada correspondiente dónde se pudo
apreciar el efecto de borrosidad causado( Flores y Méndez, 2009 ). El suavizado se llevó
a cabo con el fin de eliminar posible ruido, tal como los bordes de pecas, poros de la piel,
brillos, etc.; y para que las imágenes
resultantes de esta operación sirvieran cómo entrada para el cálculo del gradiente () . Se
debe tener cuidado de no realizar un suavizado excesivo (imagen muy borrosa) pues se pueden
perder detalles importantes en la imagen original y provocar una detección de bordes no
óptima. Después del suavizado y del cálculo del gradiente, se consiguieron las imágenes Em
(ver Figura 2 ) y Eo (ver Figura 3 ), las cuales sirvieron como entrada de la siguiente fase
del Algoritmo de Canny.
Figura 2 Magnitud del Gradiente: a) Persona No. 1, b) Persona No. 2, y c) Persona No.
Figura 3 Orientación del Gradiente: a) Persona No. 1, b) Persona No. 2, y c) Persona No. 3.
B. Supresión No Máxima La imagen In que resultó de esta etapa (ver
Figura 4 ) ya mostró contornos más delgados en comparación con los que se pueden apreciar en
las imágenes de la Figura 2.
Figura 4 Supresión No Máxima: a) Persona No. 1, b) Persona No. 2, y c) Persona No. 3.
C. Histéresis de Umbral En esta última etapa se tomó como entrada la
imagen In de la fase anterior y después de las comparaciones de sus elementos con los
Memorias del “2do. Congreso Nacional de Tecnologías de la Información”, Universidad del SABES, San José Iturbide, Gto., México, 29 y 30 de Agosto del 2014.
f(x, y) > t ()

5
umbrales se obtuvieron las imágenes de la Figura 5 , las cuales presentan los bordes
detectados en las imágenes originales.
Figura 5 Histéresis de Umbral: a) Persona No. 1, b) Persona No. 2, y c) Persona No. 3.
Transformada de Hough Circular (CHT) En la Figura 6 se presenta el código
desarrollado que implementa el algoritmo de la CHT (mostrado en la Tabla 1 ) para hallar los
límites de la pupila y del iris; se puede observar el proceso de recorrido de la imagen
de entrada (mapa de bordes) y el proceso de votación para el arreglo acumulador de la
pupila y del iris. Los radios máximos corresponden a los rangos de los círculos que
se pudieran construir.
Figura 6 Código de la implementación de la CHT
Para cada imagen de la Figura 1 se aplicó el código de la Figura 6 y se hallaron los
círculos mostrados en la Figura 7 . En el caso de la Figura 7 a se encontraron los círculos
correspondientes al iris y la pupila, los cuales coincidieron casi por completo con los
límites límbico y pupilar reales, pues en la parte superior de la imagen se pudo apreciar
que el círculo trazado para el iris abarcó una porción muy pequeña de la esclera y pestañas.
En la Figura 7 b también se hallaron los círculos del iris y la pupila, sin embargo, se
logró ver que la circunferencia perteneciente a la pupila también incluyó una parte pequeña
del iris, mientras que el círculo del iris abarcó una fracción considerable del párpado
superior y pestañas. En la Figura 7c nuevamente se localizaron los círculos
pertenecientes a la pupila y al iris, mientras que el círculo interno encajó en su totalidad con el límite real, el círculo externo
únicamente lo hizo en las partes laterales del iris abarcando fragmentos de los párpados
superior e inferior.
Figura 7 Círculos encontrados por CHT: a) Persona 1, b) Persona 2, y c) Persona 3.
ALGORITMO DE DETECCIÓN DE REFLEXIONES Para cada imagen de la Figura 1 se obtuvo un
histograma que sirvió para calcular los umbrales necesarios en la detección de
reflexiones. En la Figura 8 se muestran los resultados de aplicar la expresión () con los
umbrales: 240, 220 y 170, respectivamente.
Figura 8 Detección de Reflexiones: a) Persona 1, b) Persona 2, y c) Persona 3
IV. DISCUSIÓN En las imágenes de la Figura 5 se pudo ver
que los bordes detectados permitieron apreciar los contornos pertenecientes al
iris, párpados, pestañas y reflexiones; aunque tales bordes no se mostraron como
Memorias del “2do. Congreso Nacional de Tecnologías de la Información”, Universidad del SABES, San José Iturbide, Gto., México, 29 y 30 de Agosto del 2014.

6
líneas continuas en su totalidad, pues se alcanzaron a notar pequeños huecos entre
ellos, y por lo tanto, esto causaría problemas en el algoritmo de la CHT para poder hallar los
parámetros de los círculos (coordenadas del centro y radios) correspondientes al iris y a
la pupila; es por esto que se implementaron operaciones morfológicas para cerrar las
líneas abiertas de la Figura 5 , dando como resultado las imágenes de la Figura 9 en las
que ya se apreciaron líneas finas continuas y se removieron pixeles aislados para reducir la cantidad de puntos a analizar durante la
CHT.
Figura 9 Cerrar contornos mediante operaciones morfológicas: a) Persona No. 1, b) Persona No. 2, y c)
Persona No. 3.
A partir de la información recopilada y de lo observado en la Figura 7 , se pudo ver que
aunque la CHT es una técnica buena en la detección de círculos no siempre arrojará una
segmentación que coincida en su totalidad con los límites reales del iris, pues depende
fuertemente del mapa de bordes que reciba para su funcionamiento. Además, entre más pixeles
contenga el mapa de bordes, mayor será el tiempo de cómputo que requiera la ejecución de
la CHT, pues ésta realiza cálculos matemáticos para cada elemento del mapa de
bordes; por ello se sugiere quitar aquellos pixeles que no sean parte fundamental del mapa
y así se lograría reducir el tiempo de procesamiento de la CHT.
En las imágenes de la Figura 8 se variaron los valores del umbral hasta que se logró
localizar las reflexiones presentes en el iris. Cuando se utilizan umbrales para
detectar reflexiones es frecuente que algunas partes claras de la imagen, como párpados y
esclera, sean marcadas como reflexiones, esto se pudo apreciar en la Figura 8 b y Figura 8c.
V. CONCLUSIÓN En este trabajo se hizo un análisis del
funcionamiento del Algoritmo de Canny, la Transformada de Hough Circular y de un
Algoritmo de Detección de Reflexiones, además se realizaron códigos en MatLab de dichas
técnicas utilizando imágenes de la Base de Datos UBIRIS.v1 y se describe cómo fueron
desarrollados. Las imágenes arrojadas de las simulaciones del Algoritmo de Canny muestran
bordes con líneas no continuas en su mayoría, por lo que se trabajó para eliminar los huecos
existentes mediante la aplicación de operaciones morfológicas. Los resultados de
la CHT muestran que se pueden hallar los círculos que representan al iris (tanto
interno como externo) aunque no siempre estos coincidirán en su totalidad con los límites
pupilar y límbico reales (debido a la naturaleza no perfectamente circular del iris
y de la pupila; y además de que sus círculos no son concéntricos). El algoritmo de Detección
de Reflexiones localizó la mayoría de las reflexiones presentes en las imágenes, sin
embargo, también consideró parte de los párpados y de la esclera como parte de éstas
(por los resultados obtenidos podemos hacer una segmentación previa con los resultados de
la reflexión para eliminar información no deseada). El Algoritmo de Canny, la CHT y el algoritmo de Detección de Reflexiones junto
con los Filtros de Gabor (se aplicarán para detectar las pestañas presentes en el área del
iris) permitirán realizar una buena segmentación del iris.
AGRADECIMIENTOS El Consejo Nacional de Ciencia y
Tecnología, CONACYT, otorgó una beca a laC. VIRIDIANA JAIME ORTEGA con número(CVU/Becario): 490458/275007 para la
realización de sus estudios de posgrado en el programa MAESTRÍA EN TECNOLOGÍAS DE LA
INFORMACIÓN Y COMUNICACIONES en la Universidad Politécnica de Pachuca.
Memorias del “2do. Congreso Nacional de Tecnologías de la Información”, Universidad del SABES, San José Iturbide, Gto., México, 29 y 30 de Agosto del 2014.

7
REFERENCIAS Canny, J., 1986. A Computational Approach to
Edge Detection. Pattern Analysis and MachineIntelligence, 8(6), pp. 679-898.
Escolano, F., Cazorla, M. A. y Alfonso, M. I., 2003. Inteligencia artificial: modelos, técnicas y áreas
de aplicación. Madrid, España: Thomson.
Flores, A. y Méndez, A. A., 2009. Detección Estable de los Bordes de la Oreja en Imágenes
2D. Computación y Sistemas, 13(2), pp. 195-208.
Jaramillo, M., Fernández, J. y Martínez, E., 2000. Implementación del Detector de Bordes
de Canny sobre Redes Neuronales Celulares. Universidad de Extremadura, España.
Lodin, A., Ghiurcau, M. V. y Lodin, A., 2010. Automatic Iris Location Using Hough Transform. Carpathian Journal of Electronic and
Computer Engineering, 3, pp. 49-52.
Tejedor, J., 2009. Análisis comparativo de algoritmos en segmentación de iris. Tesis de
maestría, Universidad Carlos III de Madrid,España.
Valverde, J., 2007. Detección de bordes mediante el algoritmo de Canny. Escuela
Académico Profesional de Informática. Universidad Nacional de Trujillo, Trujillo,
Perú.
Wildes, R. P., 1997. Iris Recognition: An Emerging Biometric Technology. Proceedings of
the IEEE, 85(9), pp. 1348- 1363.
Zamudio, L. M., 2010. Reconocimiento del iris como identificación biométrica utilizando
video. Tesis de maestría, Instituto Politécnico Nacional, Tijuana, Baja
California, México.
Memorias del “2do. Congreso Nacional de Tecnologías de la Información”, Universidad del SABES, San José Iturbide, Gto., México, 29 y 30 de Agosto del 2014.
Copyright © 2022 FDOKUMEN