Procesamiento digital de imágenes obtenidas con dron ...
96
Procesamiento digital de imágenes obtenidas con dron mediante el uso de software libre Carlos Iván Sánchez Ariza Anderson Calderón Muñoz Universidad Distrital Francisco José de Caldas Facultad de Medio Ambiente y Recursos Naturales Bogotá D.C., Colombia 2020
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Procesamiento digital de imágenes obtenidas con dron ...

Procesamiento digital de imágenes
obtenidas con dron mediante el uso
de software libre
Carlos Iván Sánchez Ariza Anderson Calderón Muñoz
Universidad Distrital Francisco José de Caldas
Facultad de Medio Ambiente y Recursos Naturales
Bogotá D.C., Colombia
2020

Procesamiento digital de imágenes obtenidas con dron mediante el uso
de software libre
Carlos Iván Sánchez Ariza Anderson Calderón Muñoz
Proyecto de grado como requisito parcial para optar al título de:
Ingeniero Topográfico
Director (a):
Ing. Esp. Msc. William Barragán Zaque
Línea de Investigación: Fotogrametría
Universidad Distrital Francisco José de Caldas
Facultad de Medio Ambiente y Recursos Naturales
Bogotá D.C., Colombia
2020

Resumen y Abstract V
Resumen
En el mundo actual la gran practicidad y precisión de los drones (Sistema de aeronave
pilotada remotamente) frente a técnicas clásicas, ha aumentado su empleo en variedad
de aplicaciones y funciones. Los convierte en una alternativa óptima, pues su uso ofrece
un punto de vista antes inalcanzable. Además, la facilidad de llegar a sitios de difícil acceso
para obtener o recolectar información a menor costo y tiempo. En el ámbito de la Ingeniera
Topográfica es imprescindible conocer los tipos de drones y el uso adecuado de estos, el
desarrollo de proyectos relacionados con la recolección y análisis de datos. Así mismo, es
necesario resaltar que la calidad en las imágenes refleja un procesamiento apropiado,
proceso que se plantea ejecutar mediante el uso de software libre (MicMac).
Palabras clave: Software libre, MicMac, Remotely Piloted Aircraft System, Modelos 3D,
Ortofotomosaico, RPAS.

VI Procesamiento digital de imágenes obtenidas con dron
Abstract
In the current world, the high practicality and accuracy of drones (Remotely Piloted Aircraft
System) in relation to classical techniques has increased their use in a variety of
applications and functions. It makes them an optimal alternative, since their use offers a
previously unattainable. In addition, the ease of reaching hard-to-reach places to obtain or
collect information at a lower cost and time. In the field of Topographic Engineering, it is
essential to know the types of drones and their proper use, the development of projects
related to data collection and analysis. Likewise, it is necessary to highlight that the quality
of the images reflects an appropriate processing, a process that is proposed to be executed
through the use of free software (MicMac).
Keywords: Free software, MicMac, Remotely Piloted Aircraft System, 3D Models,
Orthophotomosaic, RPAS.

Contenido VII
Contenido
Pág.
Resumen ......................................................................................................................... V
Abstract.......................................................................................................................... VI
Lista de figuras .............................................................................................................. IX
Lista de ecuaciones ...................................................................................................... XI
Introducción .................................................................................................................... 1
1. Estado del arte o antecedentes ............................................................................... 3
2. Formulación del problema de investigación .......................................................... 7 2.1 Pregunta de investigación ................................................................................ 7 2.2 Justificación ..................................................................................................... 7
3. Objetivos ................................................................................................................... 9 3.1 Objetivo general............................................................................................... 9 3.2 Objetivos específicos ....................................................................................... 9
4. Marco teórico .......................................................................................................... 11 4.1 Cartografía ..................................................................................................... 11
4.1.1 Mapas ................................................................................................. 12 4.1.2 Proyección Cartográfica ...................................................................... 13
4.2 Fotogrametría ................................................................................................ 15 4.2.1 Fotogrametría analógica ..................................................................... 16 4.2.2 Fotogrametría analítica ....................................................................... 16 4.2.3 Fotogrametría digital ........................................................................... 17 4.2.4 Método general de la fotogrametría ..................................................... 18 4.2.5 Forma en que funcionan los programas de fotogrametría ................... 20
4.3 Aerotriangulación ........................................................................................... 21 4.3.1 Aerotriangulación por modelos independientes ................................... 22 4.3.2 Determinación de las coordenadas de los centros de proyección. ...... 22 4.3.3 Puntos de control terrestre .................................................................. 24
4.4 Dron (RPAS) .................................................................................................. 25 4.4.1 Historia del dron .................................................................................. 26 4.4.2 Clases de drones ................................................................................ 27
4.5 Aplicación en la ingeniería topográfica ........................................................... 30 4.5.1 Modelo digital del terreno (DTM) ......................................................... 30

VIII Procesamiento digital de imágenes obtenidas con dron
4.5.2 Modelo digital de elevación (DEM) ...................................................... 30 4.5.3 Ortofotomosaico ................................................................................. 31 4.5.4 Procesamiento digital de imágenes .................................................... 32
4.6 MicMac .......................................................................................................... 33 4.6.1 Presentación ....................................................................................... 33 4.6.2 Aspectos Algorítmicos ........................................................................ 34 4.6.3 Recuperación de la estructura (SfM) ................................................... 35 4.6.4 Coincidencia de imagen estéreo de múltiples vistas (MVSM) ............. 36
4.7 Otros software libres ..................................................................................... 40 4.7.1 OpenDroneMap .................................................................................. 41 4.7.2 Meshroom ........................................................................................... 42 4.7.3 Regard 3D .......................................................................................... 42 4.7.4 Visual SFM ......................................................................................... 43 4.7.5 Colmap ............................................................................................... 44
5. Metodología ............................................................................................................ 45 5.1 Fase I: Planteamiento del problema de investigación .................................... 46 5.2 Fase II: Obtención de los datos ..................................................................... 47 5.3 Fase III: Procesamiento de la información ..................................................... 49
5.3.1 Instalación del software ...................................................................... 49 5.3.2 GUI para MicMac ................................................................................ 52 5.3.3 Búsqueda de puntos de enlace ........................................................... 53 5.3.4 Post-Proceso puntos de control .......................................................... 57 5.3.5 Orientación interna y orientación relativa ............................................ 63 5.3.6 Orientación absoluta ........................................................................... 67 5.3.7 Generación de productos .................................................................... 74
5.4 Fase IV: Análisis de los datos ........................................................................ 83 5.4.1 Impacto ............................................................................................... 83 5.4.2 Limitaciones ........................................................................................ 84
6. Conclusiones y recomendaciones ....................................................................... 85 6.1 Conclusiones ................................................................................................. 85 6.2 Recomendaciones ......................................................................................... 85
A. Anexo: Tutorial MicMac ......................................................................................... 87
Bibliografía .................................................................................................................... 88

Contenido IX
Lista de figuras
Figura 4-1: Proyeccion cartográfica - Representación de la tierra. ................................. 13
Figura 4-2 Tipos de proyección ...................................................................................... 14
Figura 4-3: Estereoscopio de espejos ............................................................................ 16
Figura 4-4: Restituidor analítico universal Leica SD 2000 ............................................... 17
Figura 4-5: Esquema del método general de la fotogrametría. ....................................... 19
Figura 4-6: Nube de puntos. ........................................................................................... 20
Figura 4-8: Materialización Punto de control terrestre..................................................... 24
Figura 4-9: Posicionamiento punto de control terrestre ................................................... 25
Figura 4-10: Dron de ala fija ........................................................................................... 28
Figura 4-11: Dron ala rotatoria ........................................................................................ 29
Figura 4-12: Dron VTOL ................................................................................................. 29
Figura 4-13: Modelo digital de elevación ........................................................................ 31
Figura 4-14: Arquitectura simplificada de los módulos principales de MicMac. ............... 34
Figura 5-1: Fases metodológicas. Fuente: Elaboración propia (2020) ............................ 45
Figura 5-2: Ubicación sede Aduanilla de Paiba. Fuente: Mapas Bogotá ........................ 48
Figura 5-3: Antena GPS Trimble .................................................................................... 48
Figura 5-4: Ingreso a variables de entorno. .................................................................... 50
Figura 5-5: Propiedades del sistema. ............................................................................. 50
Figura 5-6: Variables de entorno. ................................................................................... 51
Figura 5-7: Editar variables de entrono. .......................................................................... 51
Figura 5-8: Verificación dependencias. ........................................................................... 52
Figura 5-9: GUI MicMac. ................................................................................................ 53
Figura 5-10: Ejecución comando XifGps2Txt. ................................................................. 54
Figura 5-11: Archivo Coordenadas.txt. ........................................................................... 55
Figura 5-12: Archivo RTLfromExif.xml. ........................................................................... 56

X Procesamiento digital de imágenes obtenidas con dron
Figura 5-13: Ejecución comando Tapioca. ...................................................................... 57
Figura 5-14: Ventana Startup. ......................................................................................... 58
Figura 5-15: Ventana para crear nuevo proyecto. ........................................................... 58
Figura 5-16: Importar datos. ............................................................................................ 59
Figura 5-17: Ventana de ocupación y panel de ocupación .............................................. 59
Figura 5-18: Establecer punto de control. ........................................................................ 60
Figura 5-19: Icono GPS + PostProcessing. ..................................................................... 60
Figura 5-20: Vectores de la red en color verde................................................................ 61
Figura 5-21: Icono Adjust network. .................................................................................. 61
Figura 5-22: Resultado del ajuste.................................................................................... 62
Figura 5-23: Reporte. ...................................................................................................... 62
Figura 5-24: Coordenadas de los puntos ajustados. ....................................................... 63
Figura 5-25: Ejecución comando Tapas. ......................................................................... 64
Figura 5-26: Ejecución comando Campari. ..................................................................... 65
Figura 5-27: Archivo AperiCloud.ply. ............................................................................... 67
Figura 5-28: Archivo GCP2.txt. ....................................................................................... 68
Figura 5-29: Archivo GCP2.xml. ...................................................................................... 68
Figura 5-30: Archivo IDGCP.txt. ...................................................................................... 69
Figura 5-31: Interfaz SaisieAppuisInitQT. ........................................................................ 70
Figura 5-32: Ejecución comando GCPBascule................................................................ 71
Figura 5-33: Ejecución comando ChgSysCo. .................................................................. 73
Figura 5-34: Visualización de las cámaras. ..................................................................... 74
Figura 5-35: Ejecución comando Tarama. ....................................................................... 75
Figura 5-36: Archivo TA_LeChantier.TIF (mascara). ....................................................... 76
Figura 5-37: Ejecución comando Malt. ............................................................................ 77
Figura 5-38: Ortofotomosaico. ......................................................................................... 78
Figura 5-39: Archivo Ort_DJI_0050. ................................................................................ 79
Figura 5-40: Archivo Correl_STD-MALT_Num_7. ........................................................... 80
Figura 5-41: Ejecución C3DC. ......................................................................................... 81
Figura 5-42: Archivo Nuage-Depth-DJI_0081.JPG_Masq. .............................................. 82
Figura 5-43: Modelo 3D. ................................................................................................. 83

Contenido XI
Lista de ecuaciones
Ecuación 4-1: Ecuación de coplaneidad. ........................................................................ 23
Ecuación 4-2: Ecuación de colinealidad. ........................................................................ 23
Ecuación 4-3: Dimensión de la coincidencia ................................................................... 38
Ecuación 4-4: Espacio de disparidad .............................................................................. 38
Lista de tablas
Tabla 4-1: Relación del sistema de coordenadas con el método general de la fotogrametría.
....................................................................................................................................... 20
Tabla 5-1 Diferentes software para procesamiento digital de imágenes obtenidas con dron
y su costo aproximado. ................................................................................................... 47

Introducción
El sentido de la vista del ser humano es uno de los mecanismos más poderosos que
existen. Este es capaz de detectar. Analizar y almacenar imágenes con un gran poder de
procesamiento. El procesamiento digital de imágenes consiste en alterar la información
visual para obtener mejores resultados o para aislar algunas características particulares
de las imágenes.
Los drones (Sistema de aeronave pilotada remotamente) se convirtieron en herramientas
versátiles para la toma de imágenes aéreas en diversos campos: cartografía, medio
ambiente, ingenierías, silvicultura, etc. Es importante conocer esta tecnología de fácil
acceso para emplearla en la tarea específica a desarrollar, en este caso particular en el
campo de la Fotogrametría y de la Ingeniería Topográfica en general. Cada día el manejo
de drones es más común desde todos los aspectos y diferentes actividades, se debe
resaltar que es importante analizar y comprender sus características y especificaciones,
dependiendo el tipo de práctica para el cual este destinado el dron. Con el gestor de datos
de vuelo; se puede pre-procesar, geo etiquetar y organizar las imágenes de vuelo.
Transformar las imágenes aéreas de alta resolución en un orto mosaico georreferenciado
(también conocido como ortofotografía). Las nubes de puntos individuales, con
coordenadas asignadas y un valor RGB. Se utilizan habitualmente en trabajos geométricos
y con CAD.

2 Introducción
Pero debido al software de procesamiento de imágenes comerciales que mantienen un
precio costoso para la mayoría de personas y sus funciones gratuitas son limitadas. Existen
diferentes elecciones a la hora de seleccionar un software que se ajuste a las necesidades
de cada usuario. Al margen de sus puntos fuertes, hay un elemento común: suponen una
inversión importante. Se busca que este proyecto de la solución al procesamiento de
imágenes de drones utilizando software libre (MicMac). Para la generación de cálculo de
puntos de conexión en la aero-triangulación, ortofotos, DEM; de esta manera, también
permite la georreferenciación de los productos finales en un sistema de coordenadas ya
sea local o global, estableciendo una alternativa para lo mencionado anteriormente.
Empleando este software de uso libre por medio de comandos ejecutables en la consola
de Windows se da otra salida al procesamiento digital de imágenes. Además, se genera
una documentación soportada que integre la metodología a seguir, familiarizando al lector
con el entorno de MicMac para los usos ya mencionados anteriormente.

1. Estado del arte o antecedentes
El manejo de las imágenes digitales se ha convertido en las últimas décadas en un tema
de interés extendido en diferentes áreas de las ciencias naturales, las ciencias médicas y
las aplicaciones tecnológicas entre otras. El crecimiento en el poder de cómputo, las
capacidades de almacenamiento y los nuevos sistemas de desplegado, captura e
impresión de bajo costo han facilitado el desarrollo de ésta disciplina.
Hace no mucho las posibilidades de los equipos de captura y procesamiento digital eran
bastante limitadas y los costos y tiempo de procesamiento prohibitivos. Ante lo cual en muy
pocas áreas se prestaba atención al potencial que las herramientas para el manejo de
imágenes digitales ofrecían. La explotación de éstas herramientas se había quedado
restringida a algunas secciones de investigación y el desarrollo de aplicaciones de software
se orientaba hacia problemas donde el presupuesto era exagerado. (Ortiz, 2013)
La fotogrametría es el arte, la ciencia y la tecnología para obtener información geométrica
sobre la forma tridimensional y la orientación de objetos a partir de imágenes y otros
sensores de imágenes. Es una metodología de medición barata, ya que puede ejecutarse
prácticamente con cualquier cámara digital de una marca decente. Es instantáneo ya que
captura los fenómenos observados de una vez y en una fracción de segundo, y altamente
automatizado, por lo tanto, accesible para usuarios no expertos. Gracias al campo de la
visión por computadora, la fotogrametría se rejuveneció y hoy se ubica entre otras técnicas
competitivas de detección remota (por ejemplo, LIDAR) (Granshaw & Fraser, 2015).
Los varios hitos que conducen a este progreso son la detección automatizada de puntos
de interés (Lowe, 2004). La Estructura del movimiento SfM (Structure from Motion)
algoritmos capaces de reconstruir escenas a partir de conjuntos de colecciones de
imágenes desordenadas (Snavely, Seitz, & Szeliski, 2006) y las técnicas de coincidencia
de imágenes densas que ofrecen modelos de superficie de resolución igual al tamaño de
píxel en el suelo (Pierrot-Deseilligny & Paparoditis, A multiresolution and optimization-
based image matching approach, 2006)

4 Procesamiento digital de imágenes obtenidas con dron
Todo esto contribuye a una visibilidad cada vez mayor de las herramientas fotogramétricas
en varios campos de la ciencia y la ingeniería, el creciente interés del mercado y,
posteriormente, una multitud de bibliotecas fotogramétricas / de visión por computadora y
soluciones de software, ya sea comercial o de código libre.
En la actualidad es posible explotar plataformas de bajo costo y obtener resultados de gran
calidad y crear aplicaciones de gran utilidad, versátiles y flexibles, así como aplicaciones
de software de propósito específico para atender las diversas necesidades de los
especialistas. (Rupnik, Daakir, & Pierrot Deseilligny , 2017)
Hasta la reciente aparición de los drones, la fotogrametría aérea, se realizaba con
imágenes satelitales o directamente desde helicópteros/avionetas. Cada método presenta
ventajas e inconvenientes, por lo que no existe una solución única para todo tipo de
trabajos:
Helicópteros: aunque pueden ofrecer una buena resolución (20/40 cm/píxel), son caros de
operar (costo/hora) y el procesamiento supone un gasto importante.
Avioneta: ofrece una resolución similar a los helicópteros, pero son más económicos
(costo/hora). Como en el caso anterior, es necesario estimar cuidadosamente los costos
de procesamiento ya que en la mayoría de casos supondrán costos elevados por proyecto.
Satélites: aunque no se trata de una tecnología excesivamente cara, ofrecen una
resolución muy baja para ese tipo de trabajos (1m por píxel). Otros problemas asociados
a esta tecnología son el tiempo de revisita y existencia de oclusiones (nubes).
Por otro lado, los drones para fotogrametría ofrecen rapidez, se habla de que en unas
pocas horas se puede disponer del mapa totalmente procesado, costos muy bajos a
comparación de las mencionadas anteriormente y mayor control en el resultado final. Por
otro lado, se vigila todo proceso del proyecto y se podrá decir la calidad del producto final,
obteniendo en cada trabajo más experiencia para agilizar y ser más eficaz en los trabajos
a futuro.
El control de calidad que se obtiene con este método es hacer uso de múltiples puntos de
control obtenidos con alta precisión mediante un GPS diferencial apoyado en un vértice
geodésico de la zona. A través de estos puntos de control se puede evaluar la precisión
obtenida en los trabajos. (Aerial Insights SL., 2019)
Capítulo 1 5
En la actualidad la tecnología de drones está transformando muchos campos en los que
la fotografía aérea es una alternativa para medición y procesamiento, en este caso mucho
más económico en tiempo y costo para obtener información topográfica, mediante
imágenes y aplicando técnicas fotogramétricas. Midiendo puntos de apoyo y procesando
las imágenes aéreas con un software en específico con el cual se pueden crear modelos
digitales de elevación, mosaicos orto rectificados y georreferenciados además de nubes
de puntos de alta resolución, modelos en 3D con precisión al centímetro que permiten el
cálculo de curvas de nivel, medición de áreas y volúmenes y diversos productos que
muestran la apariencia real del terreno. La utilización de drones permite, además, realizar
tareas a baja altura, grabando en tiempo real y facilitando el relevamiento de zonas
peligrosas o de difícil acceso y superar obstáculos diversos, de forma automatizada y sin
poner en riesgo la seguridad personal. En la actualidad existen con una gran variedad de
formas, tamaños y características en función del uso al que estén destinados. (Ferreira &
Aira, 2017)

2. Formulación del problema de investigación
2.1 Pregunta de investigación
¿Qué tanta utilidad y que nivel de complejidad puede tener el realizar procesamiento digital
de imágenes obtenidas con dron para obtener productos cartográficos con software libre
teniendo en cuenta su desarrollo y aplicación de manera que pueda convertirse en una
alternativa eficaz y competitiva en la actualidad?
2.2 Justificación
La realización de productos cartográficos a través de la obligación del mercado actual por
manejar software comercial, brinda una oportunidad de innovar y buscar una solución
confiable y eficaz de suplir dicha necesidad. Se busca generar una alternativa a los
diferentes productos finales cartográficos, entre los cuales se destaca el procesamiento de
imágenes de dron. Para el cual se hará uso un software libre (MicMac) proporcionado un
valor agregado a las diferentes personas, empresas o todo aquel interesado en el proceso,
para ejecutar en algunos de los diversos campos. En un balance con los productos finales
del uso de software comercial; se expondrá las ventajas, dificultades que nazcan en la
realización de los productos cartográficos terminados. Pretendiendo incrementar el interés
en el manejo libre de software como un objetivo secundario del proyecto.
La problemática abordada en este proyecto de investigación, será demostrar la dificultad
de utilizar un software libre sin previos conocimientos del mismo, con el fin de realizar
procesamiento de imágenes obtenidas con dron.
3. Objetivos
3.1 Objetivo general
• Realizar procesamiento digital de imágenes obtenidas con dron mediante el uso de
software libre
3.2 Objetivos específicos
• Generación de flujo de trabajo para realizar el procesamiento digital de imágenes
con el software de uso libre MicMac, por medio de comandos ejecutables en la
consola de Windows
• Establecer una alternativa para el procesamiento digital de imágenes con el uso de
software libre.
• Generación de una documentación totalmente soportada que integre las fases de
la metodología a seguir

4. Marco teórico
4.1 Cartografía
Desde hace siglos, el hombre se ha interesado por todo lo concerniente a la tierra en que vive.
En los tiempos más remotos se limitó, naturalmente, a las inmediaciones de su hogar; después
se extendió hasta la distancia de los mercados o lugares de intercambio y finalmente, con el
desarrollo de los medios de transporte, por el mundo entero. Siempre ha sido evidente la
especulación relativa a las dimensiones, la forma y la composición de la tierra. Por tal razón,
se debe reconocer a la cartografía, como una ciencia que está en proceso de desarrollo
técnico, pues cada día sus retos son más rigurosos y buscan entregar al usuario final datos
geográficos con calidad y eficiencia. (Aguirre, 1998)
La Cartografía es la ciencia que estudia los distintos sistemas o métodos para representar
sobre un plano una parte o la totalidad de la superficie terrestre, de forma que las
deformaciones que se producen sean conocidas y se mantengan dentro de ciertos límites o
condiciones, que dependen de las características que en cada caso se pidan a la
representación. Los métodos para representar gráficamente la Tierra sobre un plano o mapa,
necesitan de otras ciencias, como la Topografía y la Geodesia, capaces de determinar la
situación de los puntos de la superficie terrestre en ciertos sistemas de referencia.
Si la superficie a representar es de pequeña dimensión, puede considerarse ésta confundida
con el plano horizontal o tangente al esferoide terrestre en un punto central, sobre el cual se
proyectan los puntos singulares determinados mediante instrumentos que miden coordenadas
polares horizontales, ángulos y distancias (Teodolitos, taquímetros, etc.). Si la superficie es
de mayores dimensiones, no puede considerarse como un plano, sino como una superficie
esférica o elipsoidal convenientemente elegida, a la cual deben referirse las coordenadas

12 Procesamiento digital de imágenes obtenidas con dron
medidas utilizando los métodos de la Geodesia y la Topografía. Se utiliza como superficie de
referencia un elipsoide de revolución, cuyo eje es el de rotación terrestre, utilizándose entre
otros el internacional de Hayford, que tiene unos parámetros:
• Semieje ecuatorial a = 6 378 388 m • Semieje ecuatorial b = 6 356 911.946 m • Aplanamiento = 1 / 297
Sobre este elipsoide, los puntos determinados en el terreno por sus coordenadas horizontales
(acimut y distancia) se refieren a un sistema de coordenadas elipsoidales o geodésicas,
también llamadas “geográficas” que son la longitud y latitud.
Aquí empieza, en el proceso de la representación de la Tierra, el papel de la Cartografía o de
los “sistemas de representación cartográfica”, transformando las coordenadas curvilíneas
(longitud y latitud), en otras coordenadas planas, rectangulares o polares. Esta transformación
cartográfica se ocupa únicamente de la obtención de coordenadas planimétricas.
La tercera dimensión o altitud, se representa utilizando un método de Geometría descriptiva,
el “sistema acotado”, que emplea “cotas” y “curvas de nivel” y a veces tintas hipsométricas o
sombreados, que permiten ver más fácilmente el relieve. El objeto genérico de la Cartografía
consiste en reunir y analizar datos y medidas de las diversas regiones de la Tierra, y
representar éstas gráficamente a una escala reducida, pero de tal modo que todos los
elementos y detalles sean claramente visibles. (Santamaría, 2011)
4.1.1 Mapas
Un mapa es una representación convencional de la superficie terrestre, vista desde arriba, a
la que se añaden rótulos para la identificación de los detalles más importantes. Hay mapas en
los que se representa un determinado aspecto o elemento, como sucede, por ejemplo, con los
mapas pluviométricos, geológicos, demográficos, de vegetación, etc.
Por otra parte, los mapas suelen representar detalles que no son realmente visibles por sí
mismos, como, por ejemplo, las fronteras, los meridianos, los paralelos. Los mapas no se

Capítulo 4 13
limitan a representar la superficie de la Tierra. Hay mapas del firmamento, de la Luna..., y
también mapas geológicos del subsuelo. (Santamaría, 2011)
En el estudio y confección de un mapa se pueden considerar las partes siguientes:
• La escala • El sistema de proyección utilizado para representar el mapa • Los elementos a representar mediante símbolos (caminos, montañas) • La rotulación • El título • El recuadro • Detalles complementarios.
4.1.2 Proyección Cartográfica
Las proyecciones cartográficas son el método o sistema por el cual se representa gráficamente
la superficie curva de la tierra sobre una superficie plana.
Para tener claridad en esto, se debe entender cuál es la verdadera forma de la tierra y de
cómo esta se representa. Esto se puede observar en la Figura 4-1
Figura 4-1: Proyeccion cartográfica - Representación de la tierra.
Fuente: Elaboración propia (2020)
La tierra presenta una forma esférica deformada en gran cantidad de sus partes, no existe una
figura geométrica con la cual se puede representar adecuadamente, debido a esto es
necesario generar diferentes geoides y sistemas proyectados como se puede ver en la Figura
14 Procesamiento digital de imágenes obtenidas con dron
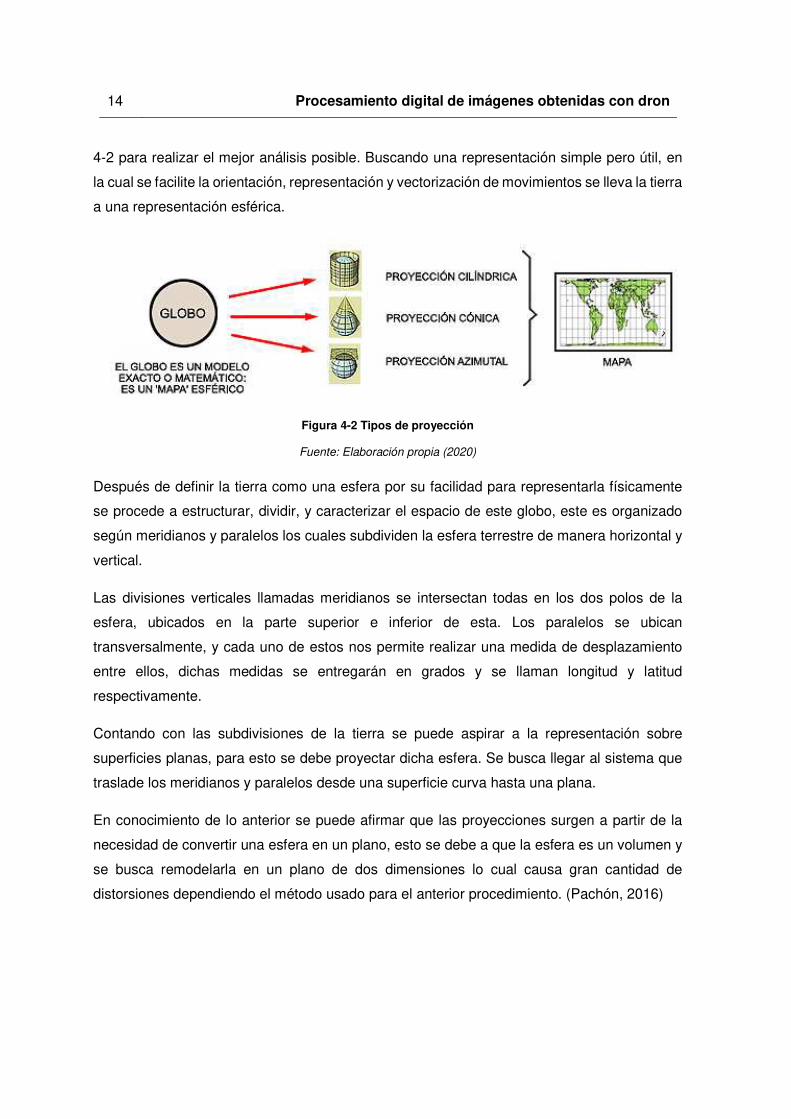
4-2 para realizar el mejor análisis posible. Buscando una representación simple pero útil, en
la cual se facilite la orientación, representación y vectorización de movimientos se lleva la tierra
a una representación esférica.
Figura 4-2 Tipos de proyección
Fuente: Elaboración propia (2020)
Después de definir la tierra como una esfera por su facilidad para representarla físicamente
se procede a estructurar, dividir, y caracterizar el espacio de este globo, este es organizado
según meridianos y paralelos los cuales subdividen la esfera terrestre de manera horizontal y
vertical.
Las divisiones verticales llamadas meridianos se intersectan todas en los dos polos de la
esfera, ubicados en la parte superior e inferior de esta. Los paralelos se ubican
transversalmente, y cada uno de estos nos permite realizar una medida de desplazamiento
entre ellos, dichas medidas se entregarán en grados y se llaman longitud y latitud
respectivamente.
Contando con las subdivisiones de la tierra se puede aspirar a la representación sobre
superficies planas, para esto se debe proyectar dicha esfera. Se busca llegar al sistema que
traslade los meridianos y paralelos desde una superficie curva hasta una plana.
En conocimiento de lo anterior se puede afirmar que las proyecciones surgen a partir de la
necesidad de convertir una esfera en un plano, esto se debe a que la esfera es un volumen y
se busca remodelarla en un plano de dos dimensiones lo cual causa gran cantidad de
distorsiones dependiendo el método usado para el anterior procedimiento. (Pachón, 2016)

Capítulo 4 15
4.2 Fotogrametría
La fotogrametría, según Bonneval, es la técnica que tiene como objetivo estudiar y definir con
precisión la forma, dimensiones y posición en el espacio de un objeto cualquiera utilizando
esencialmente medidas hechas sobre una o varias fotografías.
Etimológicamente, la palabra fotogrametría significa la métrica de lo escrito con luz. Es, en
esencia, la ciencia que utiliza la fotografía para hacer medidas, y su aplicación es extensiva a
numerosas áreas de conocimiento. Existe otra técnica que utiliza también fotografías aéreas
denominada fotointerpretación y que se dedica al estudio pormenorizado de las fotografías
con el objetivo de analizar fenómenos de muy variada tipología. (Quirós, 2014)
Actualmente, cualquier cartografía, así como los levantamientos topográficos de una cierta
magnitud, son realizados con técnicas de fotogrametría, a partir de fotografías aéreas. Si bien
el concepto está ampliamente ligado a la producción de cartografía, comprende un ámbito de
aplicación más amplio y se puede dividir en numerosas ramas que abarcan desde la
fotointerpretación hasta la teledetección. (Sánchez, 2006)
Sin embargo, la fotogrametría no interpreta fenómenos si no que, mediante mediciones en las
fotografías, genera planos y mapas de gran exactitud.
En conclusión, se puede definir la fotogrametría como la ciencia para elaborar mapas o planos
partiendo de fotografías realizadas bajo unos condicionantes específicos. (Quirós, 2014).
La fotogrametría es el arte, la ciencia y tecnología de obtener información verídica de objetos
físicos y su entorno a través de procesos de grabación, medición e interpretación de imágenes
fotográficas y patrones de energía electromagnética y otros fenómenos de la cual se divide
en:
• Fotogrametría analógica
• Fotogrametría analítica
• Fotogrametría digital

16 Procesamiento digital de imágenes obtenidas con dron
4.2.1 Fotogrametría analógica
Surge a partir de 1858 por el francés Laussedat, quien logra obtener planos exactos de
edificios y pequeñas extensiones de terreno a partir de la fotografía y esto dio pie para los
inicios de la fotogrametría realizada con estereoscopio de espejos, del cual se puede ver un
ejemplo en la Figura 4-3; que en su día se conoció con el nombre de fotogrametría ordinaria
y que ahora llamamos fotogrametría analógica. Con la invención del avión (1902) permitió unir
estas dos disciplinas y de ahí surge lo que hoy se conoce como fotogrametría analógica,
haciendo mucho más rentable la restitución de mapas topográficos. Las fotos que se
realizaban estaban limitadas generalmente a la fotogrametría terrestre. El avión se utilizó por
primera vez para uso topográfico en 1913. (CEUPE, 2018)
Figura 4-3: Estereoscopio de espejos
Fuente: Laboratorio de fotogrametría Universidad Distrital Francisco José de Caldas FAMARENA (2020)
4.2.2 Fotogrametría analítica
Surgen los primeros instrumentos electrónicos, que supuso una gran ayuda en el campo de la
fotogrametría. Las herramientas electrónicas para la fotogrametría sustituyeron a los

Capítulo 4 17
componentes mecánicos que realizaban las sustituciones, y a partir de entonces, muchas de
las operaciones realizadas manual o mecánicamente se empezaron a realizar por medio de
elementos electrónicos como el restituidor analítico universal que se puede ver en la Figura
4-4. En esta etapa puede destacarse que la toma de información es analógica y el modelado
geométrico es matemático. Mediante el uso de un mono-comparador o de un
estereocomparador integrado en el restituidor, se miden las coordenadas (X, Y) de los puntos
necesarios de las fotografías, coordenadas que son procesadas por los programas del
computador del sistema. (CEUPE, 2018)
Figura 4-4: Restituidor analítico universal Leica SD 2000
Fuente: Elaboración propia (2020)
4.2.3 Fotogrametría digital
Con la primera guerra mundial se empezó a implementar la aviación y la necesidad de ambos
bandos de obtener fotografías aéreas del campamento contrario. En la fotogrametría aérea la
cámara está en movimiento, y para poder efectuar la restitución, es preciso conocer el punto
exacto en que se capturo el fotograma. La revolución del soporte digital ha supuesto para la
fotogrametría cambios profundos en:

18 Procesamiento digital de imágenes obtenidas con dron
• Acceso a las imágenes: la naturaleza gráfica de las imágenes, y no solo la gráfica, sino
de cualquier banda del espectro electromagnético, implica que las fotos pueden ser
retocadas adaptándose a las necesidades requeridas, se puede re muestrear de forma
sencilla y sin involucrar complicados procesos químicos.
• Reformulación de disciplinas: todos los procesos asociados a la nueva imagen digital
y a sus nuevas formas de trabajar con ellas han provocado en la fotogrametría una
fusión de disciplinas. (CEUPE, 2018)
4.2.4 Método general de la fotogrametría
El Método General de la Fotogrametría (MGF) consiste en la obtención de los datos
tridimensionales de un modelo fotogramétrico, partiendo de información bidimensional de dos
fotografías correlativas.
Para llevar a cabo este método, serán necesarias dos fotografías tomadas desde dos puntos
de vista diferentes. De esta manera se reconstruye la forma de cada uno de los haces y su
ubicación en el espacio respecto a un sistema de referencia en concreto, y así, es capaz de
ofrecer coordenadas de cada uno de los puntos objeto. Para conseguir todo esto, se utiliza el
principio de visión estereoscópica que permite identificar los rayos homólogos de cada haz.
La orientación de un bloque fotogramétrico requiere seguir un proceso que consiste en dos
pasos. La primera parte e indispensable, es la realización de la orientación interna. En esta
fase se consigue el sistema de coordenadas imagen o foto-coordenadas y los puntos de
referencia que usa son las marcas fiduciales. Consiste en la determinación del haz perspectivo
de cada imagen. En la segunda parte se realiza la orientación externa, que consiste en
conocer la posición del fotograma en el espacio. Este paso puede dividirse en dos fases: la
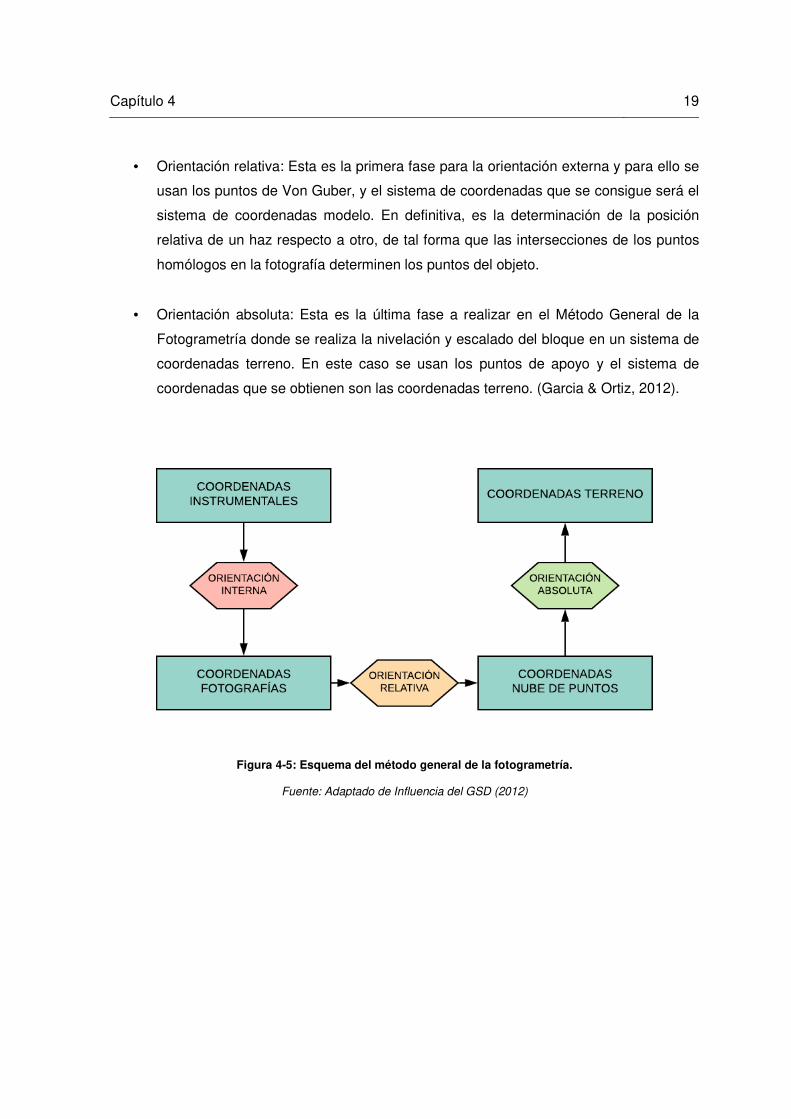
orientación relativa y la absoluta como se puede evidenciar en la Figura 4-5.
En la segunda parte se realiza la orientación externa, que consiste en conocer la posición del
fotograma en el espacio. Este paso puede dividirse en dos fases: la orientación relativa y la
absoluta.
Capítulo 4 19
• Orientación relativa: Esta es la primera fase para la orientación externa y para ello se
usan los puntos de Von Guber, y el sistema de coordenadas que se consigue será el
sistema de coordenadas modelo. En definitiva, es la determinación de la posición
relativa de un haz respecto a otro, de tal forma que las intersecciones de los puntos
homólogos en la fotografía determinen los puntos del objeto.
• Orientación absoluta: Esta es la última fase a realizar en el Método General de la
Fotogrametría donde se realiza la nivelación y escalado del bloque en un sistema de
coordenadas terreno. En este caso se usan los puntos de apoyo y el sistema de
coordenadas que se obtienen son las coordenadas terreno. (Garcia & Ortiz, 2012).
Figura 4-5: Esquema del método general de la fotogrametría.
Fuente: Adaptado de Influencia del GSD (2012)

20 Procesamiento digital de imágenes obtenidas con dron
SISTEMA DE COORDENADAS TIPO ORIGEN UNIDADES RESULTADO DE:
Coordenadas instrumentales 2D Propio Propio Medida
Foto coordenadas 2D/3D Fotograma mm Orientación interna
Coordenadas modelo 3D Fotograma izquierdo mm Orientación relativa
Coordenadas terreno 3D General m Orientación
absoluta
Tabla 4-1: Relación del sistema de coordenadas con el método general de la fotogrametría.
Fuente: Adaptado de Influencia del GSD (2012)
4.2.5 Forma en que funcionan los programas de fotogrametría
La forma en que funcionan los programas de fotogrametría es la siguiente: Primero, el
programa registra automáticamente los puntos comunes compartidos entre cada imagen
fotografiada y luego calcula las distancias entre ellos en el espacio 3D. El resultado es una
nube de puntos como se ve en la Figura 4-6 que se puede transformar en una malla 3D.
Algunos programas más avanzados también proporcionan herramientas para limpiar la nube
de puntos y mejorar la calidad general.
Figura 4-6: Nube de puntos.
Fuente Elaboración propia (2020)

Capítulo 4 21
Para que estas herramientas de fotogrametría funcionen correctamente, necesitan datos
suficientes dentro de las imágenes. La técnica de estructura de movimiento hace uso de
características naturales como la corteza de un árbol y otras texturas densas. Otros programas
utilizan marcadores codificados. Estos marcadores son útiles para escanear objetos que no
tienen las características necesarias para procesar o que tienen una superficie reflectante y/o
transparente. Si se aplican correctamente, los marcadores codificados pueden producir una
mayor precisión que la técnica de estructura de movimiento.
La mayoría de los programas de fotogrametría están estrictamente diseñados para generar
una malla 3D de alta calidad o una nube de puntos. Sin embargo, algunos programas también
proporcionan sus propias herramientas de análisis dentro del espacio de trabajo para permitir
al usuario ejecutar mediciones, para realizar anotaciones en el mapa o enriquecer los datos.
Soluciones como ésta son utilizadas a menudo por empresas de infraestructura, silvicultura,
gestión de costas y organismos similares. (Übel, 2020)
4.3 Aerotriangulación
La aerotriangulación tiene por objeto obtener las coordenadas de diversos puntos del terreno
mediante los procedimientos de la fotogrametría.
Fue concebida para efectuar los levantamientos topográficos por medio de la fotografía,
reduciendo al mínimo los trabajos a realizar en campo. Necesita, no obstante, apoyarse sobre
puntos de posición conocida en el terreno y que tendrán que determinarse en campo por
métodos geodésicos y topográficos.
El objetivo de la aerotriangulación es obtener la posición del mayor número posible de estos
puntos de apoyos mediante operaciones fotogramétricas, reduciendo por tanto los trabajos a
realizar en campo.
Dentro del conjunto de tareas que conllevan las ejecuciones cartográficas por procedimientos
fotogramétricos se encuentra la fase de orientación absoluta, consistente en dar escala y
nivelar el modelo estereoscópico a partir de una serie de puntos de posición conocida.
Para grandes proyectos, el número de puntos de control (puntos de apoyo) necesarios es
enorme, y el precio de realización puede ser extremadamente alto si es realizado

22 Procesamiento digital de imágenes obtenidas con dron
exclusivamente por métodos de medición en campo. Muchos de estos puntos de control
necesarios se establecen rutinariamente por aerotriangulación, desde una escasa conexión
de control terrestre de trabajos de campo. Una más reciente innovación reside en el uso del
GPS cinemático en el avión para proveer de coordenadas a la cámara en el momento de cada
exposición. En teoría este método de control de GPS puede eliminar lo necesario para el
control terrestre, aunque en la práctica, una pequeña cantidad de control terrestre se usa
todavía para fortalecer la solución.
4.3.1 Aerotriangulación por modelos independientes
Este método tiene un desarrollo paralelo al avance de los medios de cálculo siendo uno de los
más utilizados. Se adapta a cualquier tipo de instrumento de restitución con tal que la precisión
en las medidas sea la adecuada.
Una vez finalizada esta fase se tendrá cada uno de los modelos con sistemas de coordenadas
diferentes. Suele utilizarse como origen de coordenadas de los modelos el respectivo centro
de proyección izquierdo.
La fase de cálculo consistirá en unir cada uno de los modelos mediante transformaciones
tridimensionales sucesivas de coordenadas, de forma que todos los puntos del bloque estén
referidos a un sistema de coordenadas único para poder proceder de todos los puntos (puntos
de control menor o complementarios) del bloque fotogramétrico considerado. (Pérez, 2001)
4.3.2 Determinación de las coordenadas de los centros de proyección.
Anteriormente se ha comentado que en el método de aerotriangulación por modelos
independientes se utiliza para realizar la conexión de modelos consecutivos, además de los
puntos de apoyo y de control menores (enlace y paso), los centros de proyección de los
respectivos modelos para asegurar una correcta unión de los mismos. Para calcular las

Capítulo 4 23
coordenadas de los centros de proyección hay que tener en cuenta el tipo de instrumento de
restitución que se va a emplear. En el caso de instrumentos de restitución analíticos, dichas
se obtienen directamente del algoritmo de cálculo (condición de coplaneidad o colinealidad)
(ver ecuación 1 y 2) utilizado una vez finalizada la fase de orientación en dos pasos
(orientación analítica relativa). (Pérez, 2001)
� = � ������������
��� = 0� é���� �� �� �������� ⇒, ��, �, ��, ��, �� é���� �� ��� !��� ⇒ ��, ��, ��, ��, ��, ��
Ecuación 4-1: Ecuación de coplaneidad.
Siendo:
bx, by, bz: Coordenadas centro de proyección
��, ��, �: Coordenadas de puntos homólogos de imagen
��, ��, �: Coordenadas de puntos homólogos de la segunda imagen
" = −� $11&" − "'( + $12&+ − +'( + $13&- − -'($31&" − "'( + $32&+ − +'( + $33&- − -'( + = −� $21&" − "'( + $22&+ − +'( + $23&- − -'($31&" − "'( + $32&+ − +'( + $33&- − -'(./0/1
⇒ "', +', -'
Ecuación 4-2: Ecuación de colinealidad.
Siendo:
X, Y: Coordenadas imagen del punto.
C: Distancia principal o focal de la cámara.
m11…m33: Elementos de la matriz de rotación M que da cuenta de los giros entre el sistema imagen y el sistema objeto.

24 Procesamiento digital de imágenes obtenidas con dron
4.3.3 Puntos de control terrestre
Un punto de control es un sitio físico en tierra del cual es conocida su posición respecto a un
sistema de coordenadas, y puede utilizarse como guía. (Cruz, 2008). Generalmente estos
puntos se establecen con la finalidad de ofrecer información de gran utilidad en los procesos
de georreferenciar objetos espaciales y/o fenómenos de interés de acuerdo a las
necesidades o naturaleza específica de cada proyecto, establece que para tener un
mayor control en la corrección plani-altimétrica de las imágenes, es necesario el
establecimiento de cinco (05) puntos, distribuidos en las esquinas y uno en el centro, esto con
la finalidad de obtener una mayor precisión al momento de efectuar el proceso de restitución,
ya que resulta arriesgado realizarla fuera de los límites que encierra el cuadrilátero que
une estos puntos. De igual forma poder corregir las inclinaciones longitudinales y transversales
de la fase de orientación absoluta (Pérez, 2001). A continuación se pueden ver unos ejemplos
de puntos de control terrestres en la Figura 4-7 y la Figura 4-8.
Figura 4-7: Materialización Punto de control terrestre
Fuente: Laboratorio de fotogrametría Universidad Distrital Francisco José de Caldas FAMARENA (2020)

Capítulo 4 25
Figura 4-8: Posicionamiento punto de control terrestre
Fuente: Laboratorio de fotogrametría Universidad Distrital Francisco José de Caldas FAMARENA (2020)
4.4 Dron (RPAS)
Las siglas RPA (Remotely Piloted Aircraft), que viene a ser traducido como aeronave pilotada
remotamente. Con esta palabra se refiere a un subconjunto de vehículos aéreos no tripulados
(VANT) o en ingles UAV (Unmanned Aerial Vehicle), generalmente conocido como drones.
Estos pueden volar de manera autónoma sin la intervención de nadie. En el caso de los RPA,
por el contrario, si están controlados necesariamente por alguien desde una estación remota.
Este control no tiene por qué ser el más estricto modo de vuelo manual como ocurre con los
tradicionales aparatos radio/control, si no que pueden hacer uso de sistemas de vuelo asistido
o pilotos automáticos, pero siempre con el seguimiento de una persona capaz de ejercer
mando sobre ellos en cualquier momento del vuelo.
Cuando se habla de RPAS (del inglés Remotely Piloted Aircraft System) se refiere al sistema
completo necesario para la operación de la aeronave, lo que incluye a la aeronave (RPA), la
26 Procesamiento digital de imágenes obtenidas con dron
estación de mando y control, los equipos de comunicaciones necesarios, etc. (Ortega, y otros,
2016)
4.4.1 Historia del dron
Los primeros usos registrados fueron realizados por los austriacos en julio de 1849 después
de que se lanzaran alrededor de doscientos globos aerostáticos no tripulados con bombas
sobre la ciudad de Venecia. Menos de dos décadas después de la Guerra Civil en EEUU,
fuerzas de la Confederación y de la Unión volaban globos para misiones de reconocimiento
donde instalaban cámaras y tomar fotografías aéreas y poder controlar y dar seguimiento a
los movimientos que realizaban sus enemigos. La práctica de la vigilancia aérea más tarde
surgió en la Guerra Hispano-Americana de 1898, cuando los militares de EE.UU. equiparon
una cámara a una cometa, dando lugar a una de las primeras fotografías de reconocimiento
aéreo.
En la Primera Guerra Mundial implementaron una metodología donde Los militares utilizaban
estas cometas para obtener fotografías aéreas y seguir los movimientos del enemigo formando
mapas de situación. Este sería uno de los pasos en la evolución de los aviones no tripulados
en Estados Unidos, proceso al que se suman otras cuatro fases posteriores.
• En primer lugar: el precursor del dron se utilizó como blanco de práctica para las
fuerzas militares de principios del siglo XX.
• En segundo lugar: en el período de entreguerras y en la Segunda Guerra Mundial, el
avión no tripulado fue diseñado para ser como una especie de bomba volante que
podría ser enviado tras las líneas enemigas.
• En tercer lugar: durante la Guerra Fría, el avión no tripulado fue visto como una
plataforma de vigilancia viable capaz de capturar datos de inteligencia en áreas de
difícil acceso.

Capítulo 4 27
• En cuarto lugar: el dron, en la guerra contra el terrorismo, se ha convertido en un arma
que fusiona la capacidad de vigilancia y la de matar, convirtiéndose en un
“depredador”.
El origen de los drones no hubiera sido posible sin algunos otros elementos de los cuales
también tiene componentes como lo fue el radio. Nikola Tesla demostró por primera vez el
mando a distancia o radio control de un vehículo al final del siglo XIX. En un estanque en el
Madison Square Garden de Nueva York en 1898, el inventor controlaba a distancia un barco
con una señal de radio. Esta fue la primera aplicación de ondas de radio en la historia, lo que
significa que una de las patentes más importantes de Tesla fue la cuna de la robótica moderna.
(Delgado, 2019)
4.4.2 Clases de drones
Hay variedad de drones en la actualidad y sus principales clasificaciones son:
Drones de ala fija: Los drones de ala fija como el que se muestra en la Figura 4-9, son
aeronaves que poseen un perfil alar que permite que la aeronave pueda moverse a través del
aire y sea capaz de generar fuerzas sustentadoras para mantenerse en el aire. Este tipo de
drones tienen una estética muy similar a los aeromodelos de radiocontrol.
La principal característica de este tipo de drones es la gran autonomía que ofecen ya que
pueden estar volando varias horas gracias a su eficiencia aerodinámica. Los drones de ala fija
son ideales para mapear grandes superficies de terreno ya que con una única batería se
cubren grandes extensiones de terreno. Por este motivo son drones muy utilizados en trabajos
de agricultura de precisión y de fotogrametría. (Aerial Insights SL., 2019)

28 Procesamiento digital de imágenes obtenidas con dron
Figura 4-9: Dron de ala fija
Fuente: Laboratorio de fotogrametría Universidad Distrital Francisco José de Caldas FAMARENA (2020)
Drones de ala rotatoria: La principal diferencia de los multirrotores con respecto a los drones
de ala fija radica en la forma en la que consiguen mantenerse en el aire. Mientras que los
drones de ala fija consiguen la sustentación a través de su perfil alar, los multirrotores como
el que se puede ver en la Figura 4-10, generan la sustentación a través de las fuerzas que
generan las hélices de sus rotores. Según el número rotores que monte el dron existen:
tricópteros (3 motores), cuadricópteros (4 motores), hexacópteros (6 motores) y octacópteros
(8 motores).
De una forma sencilla se le pueden instalar diferentes tipos de cámaras (cámaras RGB,
multiespectrales, termográficas) que permiten realizar una gran variedad de trabajos. Los
multirrotores son capaces de despegar y aterrizar de forma vertical. La puesta en marcha de
este tipo de drones es mucho más rápida que con los drones de ala fija ya que pueden
despegar y aterrizar prácticamente desde cualquier lugar al no necesitar de una superficie de
terreno adecuada para ello.
El principal inconveniente de este tipo de drones es su autonomía. Los multirrotores tienen un
elevado consumo energético debido a la necesidad de que todos sus rotores deben de estar
en funcionamiento para que la aeronave permanezca en el aire. En el mejor de los casos
puedenofrecer 20 minutos de vuelo. Por tanto, si se necesitan mapear grandes extensiones
es inevitable disponer de varios juegos de baterías con el sobrecosto en tiempo y dinero que
esto conlleva. (Aerial Insights SL., 2019)

Capítulo 4 29
Figura 4-10: Dron ala rotatoria
Fuente: Laboratorio de fotogrametría Universidad Distrital Francisco José de Caldas FAMARENA (2020)
Dron VTOL: Este equipo tipo VTOL como el que se puede ver en la Figura 4-11 ofrece un
despegue y aterrizaje vertical como un multirotor, convirtiéndose de manera automática en un
rápido y estable ala fija, resistente al viento gracias a su diseño aerodinámico y poco peso.
No se requiere de una plataforma de despegue, puede ser operado desde un área de 4x4m
libre de obstáculos e interferencias. Gracias a su peso ligero y a su estructura que aprovecha
al máximo la energía, tiene la capacidad de escanear hasta 725 ha en un solo vuelo.
Gracias a la tecnología RTK y a un sensor de 24 mega pixeles, es posible georreferenciar
cada fotografía con precisión, lo cual permite obtener una adquisición de alta densidad de
millones de puntos. (HÉLICÉO-Geomatic Innovation&Technology, 2019)
Figura 4-11: Dron VTOL
Fuente: Laboratorio de fotogrametría Universidad Distrital Francisco José de Caldas FAMARENA (2020)

30 Procesamiento digital de imágenes obtenidas con dron
4.5 Aplicación en la ingeniería topográfica
Con el gestor de datos de vuelo; se puede pre-procesar, geo etiquetar y organizar las
imágenes de vuelo. Transformar las imágenes aéreas de alta resolución en un orto mosaico
georreferenciado (también conocido como orto fotografía). Las nubes de puntos individuales,
con coordenadas asignadas y un valor RGB. Se utilizan habitualmente en trabajos
geométricos y con CAD. (Calderón, 2020)
4.5.1 Modelo digital del terreno (DTM)
Representación cuantitativa y continua de la distribución espacial de las alturas del terreno.
Contiene información acerca de la posición horizontal y la altura de los elementos de la
superficie terrestre. La denominación MDT (Modelos Digitales de Terreno) es la genérica para
todos los modelos digitales, incluyendo los DEM (Modelos Digitales de Terreno) en los cuales
la altura se refiere a la elevación sobre el nivel medio del mar. (IGAC, 2016)
El modelo digital del terreno es la representación únicamente del terreno, no incluye
construcciones, infraestructura ni vegetación.
4.5.2 Modelo digital de elevación (DEM)
En este caso la palabra elevación enfatiza el concepto de medición de altura con respecto a
un datum y la generación por varios países para describir un arreglo rectangular o hexagonal
de puntos con valores de elevación obtenidos por métodos fotogramétricos o cartográficos
como se ve en la Figura 4-12. (Fallas, 2007)

Capítulo 4 31
Figura 4-12: Modelo digital de elevación
Fuente: Elaboración propia (2020)
4.5.3 Ortofotomosaico
El ortofotomosaico u ortoimagen es una presentación fotográfica en proyección ortogonal de
una zona de la superficie terrestre, en la que se ha removido las distorsiones geométricas
causadas por el sistema de captura y el relieve. Todos los elementos que están al nivel del
terreno presentan la misma escala, con la misma validez de la cartografía básica vectorial.
(IGAC, 2016)

32 Procesamiento digital de imágenes obtenidas con dron
4.5.4 Procesamiento digital de imágenes
La amplitud de las frecuencias son cantidades finitas, discretas, se llama a la imagen, imagen
digital. El campo del procesamiento de imágenes digitales se refiere al procesamiento de
imágenes digitales por medio de una computadora digital. Se debe tener en cuenta que una
imagen digital se compone de un número finito de elementos, cada uno de los cuales tiene
una ubicación y un valor particular. estos elementos se denominan elementos de imagen.
La visión es el más avanzado de los sentidos, por lo que no es sorprendente que las imágenes
desempeñen el papel más importante en la percepción humana. sin embargo, a diferencia de
los humanos, que están limitados a la banda visual del espectro electromagnético (EM), las
máquinas de imágenes cubren casi todo el espectro EM, desde gamma hasta ondas de radio.
pueden operar en imágenes generadas por fuentes que los humanos no están acostumbrados
a asociar con imágenes, que incluyen ultrasonido, microscopía electrónica e imágenes
generadas por computadora, por lo tanto, el procesamiento de imágenes digitales abarca un
amplio y variado campo de aplicaciones. (González & Woods, 2002).
Al conjunto de técnicas y procesos para descubrir o hacer resaltar información contenida en
una imagen usando como herramienta principal una computadora se le conoce como
procesamiento digital de imágenes (PDI). Hoy en día, el PDI es un área de investigación muy
específica en computación y está muy relacionada con el procesamiento digital de señales.
Esta relación estriba en el hecho de que en esencia el PDI es una forma muy especial del
procesamiento digital de señales en dos o tres dimensiones. El interés en el estudio del PDI
se basa en dos áreas de aplicación primordiales:
a) El mejoramiento de la calidad de la información contenida en una imagen con el fin de que
esta información pueda ser interpretada por los humanos
b) El procesamiento de los datos contenidos en un escenario a través de una máquina de
percepción autónoma (Domínguez, 1996)

Capítulo 4 33
4.6 MicMac
4.6.1 Presentación
MicMac es un conjunto fotogramétrico gratuito de código abierto que se puede utilizar en una
variedad de escenarios de reconstrucción en 3D. Se dirige principalmente a usuarios
profesionales o académicos, pero se hacen esfuerzos constantes para que sea más accesible
al público en general. Una de las fortalezas de MicMac es su alto grado de versatilidad. De
hecho, se puede utilizar en varios campos: cartografía, medio ambiente, industria, silvicultura,
patrimonio, arqueología, etc. MicMac permite la creación de modelos 3D y de ortoimágenes
cuando sea apropiado El software es adecuado para todo tipo de objetos de cualquier escala:
desde pequeños objetos o estatuas con adquisición desde el suelo, hasta iglesias, castillos
mediante adquisiciones de drones, hasta edificios, ciudades o áreas naturales mediante
adquisiciones aéreas o satelitales. Las herramientas también permiten la georreferenciación
de los productos finales en un sistema de coordenadas local / global / absoluto. Algunas
herramientas complementarias abren los campos de metrología y topografía del sitio.
(MicMac, 2017)
Desde el punto de vista de la arquitectura como se puede ver en la Figura 4-13, la
característica única de MicMac con respecto a sus alternativas es que el usuario puede operar
en diferentes niveles de software, El usuario menos experimentado puede dirigir el
procesamiento mediante una línea de comando simple donde se deben establecer pocos o
ningún parámetro. Un usuario experimentado puede operar desde la misma línea de comando
adaptando los parámetros que normalmente se rellenan con los valores predeterminados. Un
experto en fotogrametría puede acceder al parámetro que desee en cualquier paso del
procesamiento a través de un conjunto de archivos Además de eso, los desarrolladores y
científicos pueden usar MicMac como una biblioteca, implementar sus propios algoritmos y
compartirlos en beneficio de la comunidad fotogramétrica. Dicho esto, MicMac fue diseñado
principalmente como una herramienta para profesionales (Rupnik, Daakir, & Pierrot Deseilligny
, 2017)

34 Procesamiento digital de imágenes obtenidas con dron
Figura 4-13: Arquitectura simplificada de los módulos principales de MicMac.
Fuente: Adaptado de MicMac (2017)
4.6.2 Aspectos Algorítmicos
El flujo de trabajo fotogramétrico abarca el pasaje de las imágenes, a través de la estimación
de los parámetros de orientación, finalizando con un modelo de superficie 3D. En otras
palabras, es un pasaje de una representación 2D del mundo capturado por una cámara, a
través de la inferencia de la posición y rotación de esa cámara en el momento de la toma de
la imagen, hacia una restitución 3D de la dimensión perdida. Siempre que la calidad del
resultado final dependa de la ingeniosa ingeniería de muchos pequeños pasos de
procesamiento, la estimación de los parámetros de orientación de la cámara y los algoritmos
de correspondencia constituyen el corazón de la tubería. Respectivamente, las próximas
secciones se concentran en estos dos aspectos, informan sobre los métodos adoptados y dan
una visión global de lo que es posible en MicMac.

Capítulo 4 35
4.6.3 Recuperación de la estructura (SfM)
Recuperación de la estructura (es decir, coordenadas 3D de la escena observada) y el modelo.
Es bien sabido que este modelo (es decir, la transformación del espacio 3D al espacio 2D y
viceversa, también conocida como ecuación de colinealidad) no es lineal, por lo tanto, requiere
linealización. Además, no existe un algoritmo directo capaz de calcular parámetros de
orientación globalmente consistentes con varias imágenes (generalmente n > 3). Para superar
esta brecha, se propusieron soluciones de arranque. Usando algoritmos directos para una sola
imagen, un par o triplete de imágenes, la orientación global se deduce secuencialmente o
jerárquicamente a partir de un par de imágenes semilla. Los parámetros así obtenidos sirven
como entrada para un sistema de ecuaciones compuesto por las ecuaciones de colinealidad
linealizadas, donde sus valores óptimos, en el sentido estocástico, se encuentran de forma
iterativa. Las observaciones (por ejemplo, puntos de enlace) son redundantes, por lo tanto, la
solución se deduce con el método de mínimos cuadrados minimizando una función objetivo.
La función típica son las diferencias al cuadrado entre las observaciones nominales y las
predichas a partir del modelo estimado, posiblemente sujetas a restricciones. La última etapa
también se conoce como el ajuste de bloque de paquete (BBA).
Implementación MicMac
MicMac resuelve el BBA con el método Levenberg-Marquardt (LM). El LM es, en esencia, el
método de Gauss-Newton enriquecido con un factor de amortiguación para manejar matrices
jacobianas con deficiencia de rango.
El elemento crítico del modelo matemático de BBA es la ponderación de observación,
conocida como modelo estocástico. MicMac especifica tres estrategias de ponderación
diferentes. La primera estrategia corresponde a la ponderación en el modelo clásico conocido
en fotogrametría, el Gauss-Markov, donde las observaciones se ponderan por sus verdaderas
desviaciones estándar conocidas a priori. La segunda estrategia controla la influencia de una
categoría particular de observaciones para evitar soluciones impulsadas por una sola
categoría solo por la simple razón de sus abundantes observaciones. La última estrategia

36 Procesamiento digital de imágenes obtenidas con dron
aborda la robustez. El peso es una función del residuo de la observación en el BBA, por lo
tanto, da más credibilidad a las observaciones que están cerca del modelo estimado y, por el
contrario, limita la influencia de las observaciones con residuos altos.
Punto de vista del usuario
Hay dos módulos principales que manejan la recuperación de orientación de la cámara con la
interfaz simplificada - Tapas, Campari - y ambos módulos llaman a la herramienta de
orientación principal Apero. Tapas calcula la orientación puramente relativa de las imágenes,
utilizando los puntos de enlace observados como la única entrada. Dado que en este punto
no hay a priori las posiciones y rotaciones de las cámaras, Tapas también implica el paso de
inicialización donde reconstruye progresivamente las cámaras con la ayuda de los algoritmos
de orientación directa, y las entrelaza con la rutina BBA.
A diferencia de Tapas, Campari es un módulo BBA adaptado para manejar observaciones
heterogéneas. Además de los puntos de enlace, funciona con GCP, los datos GNNS y puede
imponer varias restricciones a la solución. Este módulo generalmente se ejecuta una vez que
se establece una buena orientación relativa, y las cámaras se mueven dos en un sistema de
coordenadas (CS) coherente con el de las observaciones auxiliares, por ejemplo, los GCP.
Este último se realiza con cualquier herramienta Bascule, y es una transformación de similitud
espacial. Tanto Campari como todas las variaciones de la báscula pueden considerarse
herramientas de georreferenciación.
4.6.4 Coincidencia de imagen estéreo de múltiples vistas (MVSM)
Dadas varias imágenes superpuestas con parámetros de orientación conocidos, MVSM (Multi-
view stereo image matching) es el proceso de reconstruir un modelo 3D completo de la escena
al encontrar los píxeles correspondientes (es decir, sus disparidades o profundidades,
respectivamente) entre pares de imágenes y triangularlos en el espacio. El algoritmo genérico

Capítulo 4 37
se define como un problema de minimización de energía que busca un mapa de disparidad
que minimice la energía. La minimización se puede resolver con algoritmos locales, semi-
globales y globales. Hoy, el método para producir modelos 3D densos a partir de imágenes es
la coincidencia semi-global.
La coincidencia de imágenes se divide en tres etapas de procesamiento: cálculo del costo de
coincidencia de píxeles, agregación de costos y cálculo de disparidad. El costo de coincidencia
es una medida de disimilitud, es decir, describe la improbabilidad de que dos píxeles
pertenezcan a un punto único en 3D. Como la correspondencia puede ser ambigua y el costo
mínimo insignificante, se impone un a priori adicional sobre la función de energía que penaliza
los cambios de disparidad en los píxeles vecinos (el caso de los algoritmos locales y semi-
globales). Esta agregación tiene lugar dentro de una ventana, una ruta 1D (localmente) o
múltiples rutas (semi-globalmente). En el último caso, el costo de una disparidad dada es un
costo acumulado a lo largo de muchos caminos que terminan en el píxel en cuestión
Implementación MicMac
La coincidencia densa de imágenes en MicMac es posible con una versión de algoritmos semi-
globales y globales. El objetivo de la coincidencia es encontrar un mapeo tal que:
234: τ ⊗ ε34.
Dependiendo de la geometría de restitución, el τ puede ser el espacio euclidiano 3D o el
espacio de imagen de la imagen maestra, por lo tanto, es el espacio donde se produce el
modelo de superficie. El ε34 puede ser la profundidad de la euclídea Z o la disparidad de
imagen
La motivación para distinguir entre estas dos geometrías de restitución, el terreno y la imagen,
es doble. Por un lado, un Modelo de superficie digital (DSM) producido a partir de imágenes
aéreas se define normalmente en algunos sistemas de coordenadas de referencia, por lo
tanto, es más intuitivo realizar la reconstrucción directamente en el sistemas de coordenadas
objetivo (es decir, la geometría del suelo), donde el espacio de disparidad ε34 es la coordenada
Z. Por otro lado, se sabe que la coincidencia en el espacio de imágenes con un maestro y un
conjunto de imágenes esclavas es más confiable, especialmente en aplicaciones de

38 Procesamiento digital de imágenes obtenidas con dron
fotogrametría de corto alcance y para pequeños conjuntos de datos. El espacio disparidad ε34
en la geometría de la imagen es entonces o bien la profundidad a lo largo del rayo o la
disparidad respectivo en el espacio de imagen (es decir, la geometría de la imagen). Depende
del usuario qué geometría emplear.
MicMac ofrece una formulación muy flexible de la función de costo de coincidencia en lo que
respecta a sus términos, se considera el algoritmo de optimización y la dimensión de la
coincidencia que se puede ver en la Ecuación 4-3
ε9234: = ; <= >�, �, 234&�, �(? + ||∇9234:||BCD
Ecuación 4-3: Dimensión de la coincidencia
dónde < >�, �, 234&�, �(? es la medida de similitud entre píxeles con < = 0 cuando son
idénticos; |E∇9234:E|BCD una norma sobre el gradiente, que se utiliza como criterio de
regularidad (penaliza la variación de &234); F� es la regularización en el primer componente de
disparidad y F� la regularización en el segundo componente (equivalente a la coincidencia en
la dirección transversal a la línea epipolar).
|E∇9234:E|BCD = F� ∗ E∇ + &234(E + F� ∗ |∇&234(| Ecuación 4-4: Espacio de disparidad
El |E∇9234:E|BCD controla a priori en el espacio de disparidad de una manera que:
Si el modelo deseado es suave, una función convexa F es adecuada (es mejor subir un salto
dado por pasos regulares).
Si el modelo deseado tiene muchas discontinuidades, una función cóncava F es adecuada (es
mejor subir un salto dado en un solo paso).
cuando no hay un fuerte previo, la opción predeterminada es tener F lineal.

Capítulo 4 39
si existe un conocimiento a priori sobre la pendiente de la escena, puede imponer una
pendiente máxima permitida de la escena.
para la coincidencia 2D, se pueden configurar factores de suavizado no isotrópicos.
La medida de similitud real < >�, �, 234&�, �(? se calcula a partir del coeficiente de correlación
cruzada normalizado (1 − Cor ), definido como una función de múltiples imágenes, en lugar de
un solo par. El coeficiente puede privilegiar una imagen de un conjunto de imágenes (por
ejemplo, una imagen maestra), o considerar el conjunto como "simétrico". También son
posibles diferentes tamaños de ventana de correlación cruzada y ventanas ponderadas.
Para encontrar el mapa de disparidad que minimiza la energía, MicMac emplea por defecto
una variante multidireccional del algoritmo de programación dinámica. Los resultados en
direcciones independientes se agregan tomando una media de todos los resultados o
simplemente el mejor resultado. Opcionalmente, se puede aplicar una minimización global
mediante el algoritmo (Min-Cut / Max-Flow).
Para limitar el espacio de búsqueda de disparidad, acelerar el cálculo y reducir el ruido,
MicMac adopta un enfoque de coincidencia de resolución múltiple donde los mapas de
disparidad de resolución gruesa sirven como predictores de la salida de resolución fina.
(Rupnik, Daakir, & Pierrot Deseilligny , 2017)
Punto de vista del usuario
La creación de DSM (Modelo digital de superficie) en MicMac tiene lugar a través de varias
herramientas que son semi automatizadas o totalmente automatizadas. En ambos casos, la
herramienta principal para manejar la coincidencia densa de bajo nivel es el MicMac, al que
un usuario experto puede acceder a través de un archivo XML.
Malt, la herramienta semiautomática, funciona en tres modos predefinidos, es decir , Ortho ,
UrbanMNE y GeomImage . Los modos están adaptados para producir ortofotografía, DSM en
geometrías de suelo e imagen. En consecuencia, Ortho y UrbanMNE se seleccionarían para
terrenos planos o superficies planas y GeomImage para superficies 3D verdaderas.

40 Procesamiento digital de imágenes obtenidas con dron
El inconveniente de Malt GeomImage es que para una restitución 3D completa de una
superficie, se deben indicar varias imágenes maestras y sus esclavas relevantes. Siempre que
sea factible para geometrías de objetos simples, se vuelve ineficaz para objetos más
complejos y extensos. Las herramientas totalmente automatizadas superan este impedimento
al hacer esta elección por el usuario, al mismo tiempo que priorizan la integridad y precisión
de la salida. Las dos herramientas automatizadas son C3DC y PIM, que proporcionan una
nube de puntos y un conjunto de mapas de profundidad, respectivamente. Para continuar con
la generación de un ortofotomapa, los comandos PIMs2MNT y posteriormente Tawny se
ejecutarán. Este último recopila las ortofotos por imagen y las fusiona en un solo mosaico. Las
ortofotos individuales se pueden crear con la herramienta PIMs2MNT o Malt
Además del emparejamiento 1D clásico (a lo largo de un rayo de imagen, una fila de imagen
o la coordenada Z) para la reconstrucción de la geometría del objeto, MicMac también
implementa una estrategia de emparejamiento 2D. Esta estrategia es útil en estudios de
deformación 2D entre las imágenes rectificadas, como una herramienta de estimación de
calidad de orientación para evaluar la restante y-paralaje o en los casos en que las
orientaciones de los parámetros son desconocidos o conocidos con poca precisión
(ejecutados con un archivo XML). Debido a que las disparidades esperadas pertinentes a la
geometría son de frecuencias más altas que aquellas a lo largo del paralaje y, la regularización
de la función de energía en las dos direcciones se maneja por separado como se puede
observar en la Ecuación 4-4. (Rupnik, Daakir, & Pierrot Deseilligny , 2017)
4.7 Otros software libres
Según la Free Software Foundation, el software libre se refiere a la Libertad de los usuarios
para ejecutar, copiar, distribuir, estudiar, cambiar y mejorar el Software; de modo más preciso,
se refiere a cuatro libertades de los usuarios del software: la libertad de usar el programa, con
cualquier propósito; de estudiar el funcionamiento del programa, y adaptarlo a las
necesidades; de distribuir copias, con lo cual se puede ayudar a otros y de mejorar el programa
y hacer públicas las mejoras, de modo que toda la comunidad se beneficie (para la segunda
y última libertad mencionadas, el acceso al Código fuente es un requisito previo).

Capítulo 4 41
El software libre suele estar disponible gratuitamente, o al precio de costo de la distribución a
través de otros medios; sin embargo, no es obligatorio que sea así, por lo tanto, no hay que
asociar software libre a "software gratuito" (denominado usualmente Freeware), ya que,
conservando su carácter de libre, puede ser distribuido comercialmente ("software comercial").
Análogamente, el "software gratis" o "gratuito" incluye en ocasiones el Código fuente; no
obstante, este tipo de software no es libre en el mismo sentido que el software libre, a menos
que se garanticen los derechos de modificación y redistribución de dichas versiones
modificadas del programa. (Pérez Rivero, 2010)
Como otras muchas herramientas, el software de fotogrametría viene en muchas formas y
tamaños. Los principales desarrolladores de software han publicado soluciones comerciales
que son ideales para aplicaciones industriales y de ingeniería. Sin embargo, hay una serie de
programas disponibles para descarga gratuita. (Übel, 2020).
4.7.1 OpenDroneMap
OpenDroneMap (ODM) es un kit de herramientas de código abierto para procesar imágenes
capturadas por drones. OpenDroneMap convierte las imágenes simples obtenidas de las
cámaras en datos geográficos tridimensionales, pudiéndose utilizar posteriormente en
combinación con otros conjuntos de datos geográficos.
ODM contiene varias herramientas para procesar imágenes de drones como: nubes de puntos,
modelos digitales de superficie, imágenes orto rectificadas, modelos digitales de elevación,
etc.
OpenDroneMap está construido en Ubuntu 16.04, pero se puede ejecutar en otras plataformas
utilizando Docker. OpenDroneMap utiliza línea de comandos, pero existe una interfaz gráfica
de usuario para ello: WebODM. (Morales, 2019)

42 Procesamiento digital de imágenes obtenidas con dron
4.7.2 Meshroom
Meshroom es un software de reconstrucción 3D gratuito y de código abierto con fotogrametría.
Este software puede construir un modelo 3D de un objeto principal a partir de un conjunto de
imágenes tomadas desde diferentes ángulos. Básicamente, este software analiza la imagen
utilizando algunos algoritmos fotogramétricos y calcula los puntos de superficie y luego traza
el modelo 3D que puede exportar como un archivo OBJ. Cuenta con visor 3D integrado en su
interfaz donde se puede ver el modelo final. Puedes ver el modo generado desde todos los
ángulos, guardar y eso. Hay varios otros parámetros que puedes modificar para mejorar la
salida y usarlos donde quieras. (Alicevision, s.f.)
4.7.3 Regard 3D
Regard3D es un software de fotogrametría gratuito y de código abierto que utiliza el método
de “estructura de movimiento” (structure-from-motion) para generar modelos 3D. Aunque
Regard3D es gratuito, sigue siendo un software muy potente. De hecho, puede tomarte un
tiempo hasta que te sitúes y te sientas cómodo con todos los ajustes y parámetros que se
pueden configurar para lograr el tipo de resultados que deseas. El programa incluye incluso
herramientas completas para editar la nube de puntos antes de generar una malla 3D. Si eres
nuevo en este tipo de programas de fotogrametría, Regard3D te ayudará. Su sitio web ofrece
todas las guías y tutoriales que necesitas para empezar rápidamente. (Übel, 2020)
Utiliza “puntos clave” para detectar características en cada imagen con una alta probabilidad
de encontrarse en diferentes imágenes del mismo objeto, también para cada imagen calcula
un descriptor matemático, estos descriptores se combinan y filtran geométricamente para
obtener una colección de coincidencias entre cada par de imágenes. (regard3d, s.f.)

Capítulo 4 43
4.7.4 Visual SFM
de forma similar al resto de herramientas, su objetivo es crear una nube de puntos en 3D, con
la ayuda de diversas herramientas. Estas nubes de puntos están formadas por simples puntos
descritos por unas coordenadas espaciales XYZ y unos valores RGB que serán los
encargados de restituir la textura original a través de lo que se conoce como nubes de puntos
densas. El concepto de trabajo se acerca a Photomodeler, sin embargo, con Visual SFM no
es necesario establecer puntos de referencia entre imágenes ni calibrar nuestra cámara, lo
cual agiliza el proceso y nos permite trabajar con grandes cantidades de imágenes sin mucha
dificultad. Visual SFM tampoco no incorpora herramientas de medición, proceso que debemos
dejar para otras herramientas como MeshLab, aunque en las últimas versiones se dispone de
herramientas de georreferenciando de nubes de puntos por GCP (ground control points) y
GPS.
El proceso de funcionamiento de Visual SFM, como el de muchas herramientas de SfM se
fundamenta en los siguientes pasos:
1. SIFT: o detección de puntos clave o coincidentes entre las múltiples imágenes.
2. Bundle Adjustment: Crea la nube de puntos dispersa a partir de los puntos clave
detectados en el paso anterior. En este paso se puede intuir la forma de nuestro
modelo y disponer de la posición de las cámaras.
3. Multi-View Stereo: Será el proceso encargado de generar la nube de puntos densa a
partir de todos los datos anteriores. De este proceso se encargan las herramientas
CMVS y PMVS2 de Yasutaka Furukawa, ingeniero de Google Maps, de hecho, PMVS2
es una herramienta usada en dicha tecnología.
Visual SFM está disponible para WIN, Mac y Linux. (Pereira, 2012)

44 Procesamiento digital de imágenes obtenidas con dron
4.7.5 Colmap
COLMAP es una tubería de reconstrucción 3D de extremo a extremo basada en imágenes de
propósito general (es decir, Estructura desde el movimiento (SfM) y Multi-View Stereo (MVS))
con una interfaz gráfica y de línea de comandos. Ofrece una amplia gama de características
para la reconstrucción de colecciones de imágenes ordenadas y no ordenadas. El software se
ejecuta en Windows, Linux y Mac en computadoras de escritorio normales o servidores /
clústeres de cómputo. COLMAP tiene licencia bajo la Licencia BSD. (Schonberger, Zheng,
Pollefeys, & Frahm, 2016)
COLMAP es un software gratuito de fotogrametría disponible para su descarga en Github.
Puede ejecutarse desde la línea de comandos o como cualquier otro programa con una GUI.
Como la mayoría de los otros programas de fotogrametría de esta lista, COLMAP puede
reconstruir objetos 3D automáticamente a partir de una sola cámara o configuraciones estéreo.
Sin embargo, como es un programa creado por investigadores, COLMAP también incluye
muchas opciones altamente avanzadas. No es obligatorio para aquellos usuarios que quieran
generar una malla 3D rápida y sencilla, pero definitivamente mejorará la calidad del resultado.
Por ejemplo, puedes definir ampliamente el tipo de cámara que utilizas para capturar las
imágenes. También es posible ajustar el proceso de extracción para obtener los mejores
resultados posibles. Aunque el programa puede exportar una malla 3D, sólo se puede trabajar
con una nube de puntos en el editor. Para limpiar y refinar la malla 3D, es necesario trabajar
con otros programas como MeshLab. (Übel, 2020)

5. Metodología
Para el desarrollo de este proyecto se ejecutaron 4 fases metodológicas, con el fin de
separar cada uno de los procesos realizados para alcanzar el producto final. La mayoría
de ellos en oficina, dado que la información de campo fue suministrada por el Ingeniero
William Barragán; Las fases metodológicas se pueden ver en la Figura 5-1
Figura 5-1: Fases metodológicas.
Fuente: Elaboración propia (2020)
PLANTEAMIENTO DEL PROBLEMA DE INVESTIGACIÓN
RECOLECCIÓN DE INFORMACIÓN Y OBTENCIÓN DE LOS DATOS
PROCESAMIENTO DE LA INFORMACIÓN
ANÁLISIS DE LOS DATOS

46 Procesamiento digital de imágenes obtenidas con dron
5.1 Fase I: Planteamiento del problema de investigación
La fotogrametría se convirtió en una técnica bastante ingeniosa para realizar escaneo 3D,
pero no todas las personas, en especial estudiantes pueden costear una licencia de estos
software, por este motivo se vuelve importante el poder tener alternativas gratuitas y de
calidad para realizar este tipo de tareas. Para identificar el problema, se ha investigado el
modo de operación y los costos de algunos software. En la situación de un usuario normal,
se puede evidenciar lo costoso que puede ser trabajar con un software comercial, además
de los problemas legales en el caso de hacer un uso indebido de estos.
Ahí surge la idea de mostrar otra alternativa al público en general, sin costo en la
adquisición de software de procesamiento digital de imágenes, con los mismo o mejores
resultados a la hora de generar productos finales. Con el auge de los drones, su gran
practicidad en muchos campos y el creciente interés del mercado, empezaron a salir
diferentes software tanto libres como comerciales para procesar imágenes, a continuación
en la Tabla 5-1 se pueden observar los precios y las plataformas que corren algunos
software:
PROGRAMA PLATAFORMA LICENCIA
OpenDroneMap Linux, Windows Libre
Visual SFM Linux, OSX, Windows Libre
Open MVS Linux, OSX, Windows Libre
123D Cath Android, IOS, Windows, Web based
Libre
Photomodeler Windows Desde 3500 €
Drone 2Map Windows 1500 € año
Pix4D Windows OSX (BETA), Online
260 €/mes 2600 €/año 6500 €/ Perpetua
PhotoScan Linux, OSX, Windows 179 € Standard 3499 € Professional
Drone Deploy Online Pro 99 € mes Bussiness 300 € mes
Capítulo 4 47
Aerial Insights Online Desde 30 euros Tabla 5-1 Diferentes software para procesamiento digital de imágenes obtenidas con dron y su costo
aproximado.
Con esta información se decide explorar los diferentes software para trabajar uno en
concreto, se decide trabajar con MicMac. MicMac ha sido desarrollado en el Instituto
Nacional de Información Geográfica y Forestal (IGN) y en la Escuela Nacional de Ciencias
Geográficas (ENSG), desde 2003. Inicialmente, las herramientas de software se
desarrollaron pensando exclusivamente en la producción cartográfica del IGN. Las
herramientas independientes se interconectaron en 2005 a través de un marco XML, lo
que permite al usuario parametrizar libremente los cálculos en todas las etapas de
procesamiento. En 2007, IGN comenzó a distribuir gratuitamente MicMac bajo la licencia
CECILL-B que es una versión de la licencia L-GPL adaptada a la ley francesa.
5.2 Fase II: Obtención de los datos
Para simplificar procesos, se trabajó con fotografías tomadas por el ingeniero William
Barragán en una práctica de la materia cartografía digital avanzada de la Universidad
Distrital Francisco José de Caldas el día Domingo 26 de mayo de 2019, el objetivo principal
de la práctica fue tomar fotografías de la sede Aduanilla de Paiba de la Universidad Distrital
Francisco José de Caldas ubicada entre las calles 12 y 13 y las carrera 31 y 32 en la
ciudad de Bogotá como se puede ver en la Figura 5-2, para realizar su posterior
procesamiento.
Como resultado del vuelo se obtuvo 55 fotografías y los archivos pertinentes al
posicionamiento con GPS de 4 puntos de control terrestres (GCP); logrados los datos es
necesario tener un amplio conocimiento en el funcionamiento del software, para lo cual se
hizo uso de la documentación del software MicMac, el foro y trabajos que han realizados
algunas personas en pro de la comunidad de MicMac. (Calderón 2020)

48 Procesamiento digital de imágenes obtenidas con dron
Figura 5-2: Ubicación sede Aduanilla de Paiba.
Fuente: Mapas Bogotá
Los datos de los puntos de control terrestre fueron tomados con 4 antenas Trimble Zephyr
39105 como los que se ven en la Figura 5-3, las fotografías fueron tomadas con un Dron
Phantom 3 Professional y los datos RINEX de la estación permanente BOGA de la red
Magna Eco para realizar el post proceso de los GCP, fueron descargados a través dela
página del IGAC (Instituto Geográfico Agustín Codazzi).
Figura 5-3: Antena GPS Trimble
Fuente: Elaboración propia (2019)

Capítulo 4 49
5.3 Fase III: Procesamiento de la información
En esta fase se realiza la descarga de información de datos crudos, el post proceso y se
hace el procesamiento digital de imágenes para obtener los productos finales (Ortofoto,
DSM)
5.3.1 Instalación del software
Para realizar la instalación de MicMac en el equipo primeramente se debe descargar el
archivo “micmac_win.zip” del siguiente sitio web:
https://github.com/micmacIGN/micmac/releases; el cual es el archivo de instalación
comprimido para el sistema operativo Windows, se debe tener en cuenta esta información
ya que en este mismo enlace se pueden encontrar los archivos de instalación para los
diferentes sistemas operativos que pueden correr MicMac. El tamaño del archivo es de
38.7MB aproximadamente.
Ya con el archivo se procede a descomprimir y guardar en la ruta de preferencia, se
recomienda que las carpetas que hacen parte de la ruta no tengan espacios ni caracteres
especiales ya que estos podrían generar errores al momento de la instalación. Para el
ejemplo de este tutorial se utilizó la siguiente ruta: “C:\Tesis\MicMac”.
Para la instalación de MicMac es necesario editar las variables de entorno del sistema, la
manera más sencilla de realizar este proceso es escribiendo la palabra variables en el
buscador de Windows y seleccionar la opción “Editar las variables de entorno del sistema”
como se ve en la Figura 5-4

50 Procesamiento digital de imágenes obtenidas con dron
Figura 5-4: Ingreso a variables de entorno.
Fuente: Elaboración propia (2020)
Esto abre la ventana de las propiedades del sistema como se ve en la Figura 5-5, ahora
se debe ubicar en la pestaña de opciones avanzadas y dar clic en el botón “variables de
entorno” que se encuentra en la parte inferior de la ventana; este da el acceso a la ventana
donde se pueden editar las variables.
Figura 5-5: Propiedades del sistema.
Fuente: Elaboración propia (2020)

Capítulo 4 51
Ya en la ventana “variables de entorno” como se puede ver en la Figura 5-6, se hace doble
clic en la fila con el nombre “Path” de las variables del sistema para editar dicha variable.
A continuación, se debe dar clic en nuevo y pegar la ruta donde se encuentra el archivo de
instalación del software, añadiendo al final de esta ”/bin” como se ve en la Figura 5-7.
Figura 5-6: Variables de entorno.
Fuente: Elaboración propia (2020)
Figura 5-7: Editar variables de entrono.
Fuente: Elaboración propia (2020)

52 Procesamiento digital de imágenes obtenidas con dron
Una vez realizados estos pasos se procede a verificar la instalación del software y sus
dependencias en la consola de Windows a través del comando “mm3d
CheckDependencies”, se debe verificar que cada una de sus dependencias haya sido
encontrada “found” como se ve en la Figura 5-8.
Figura 5-8: Verificación dependencias.
Fuente: Elaboración propia (2020)
5.3.2 GUI para MicMac
La GUI (graphical usar interface) de MicMac es demasiado limitada, pero puede ser de
ayuda en el uso de algunos comandos debido a la complejidad que puede tener para
algunos usuarios que no tienen conocimientos básicos de programación. Aunque este
tutorial está enfocado en hacer uso de MicMac con la utilización de líneas de comandos,
es importante resaltar esta opción que puede despejar futuras dudas que le surjan al
usuario al momento de realizar un procesamiento.
Para activar esta opción se debe ingresar en el símbolo del sistema y en este mismo
ejecutar el comando:
mm3d vGrShade

Capítulo 4 53
Figura 5-9: GUI MicMac.
Fuente: Elaboración propia (2020)
Seguido a esto se abre una ventana “GrShade” se hace clic en “Select File” como se
observa en la Figura 5-9 y se busca el archivo “GrShade” que se encuentra en la carpeta
“bin”, todo esto en el directorio de instalación de MicMac.
5.3.3 Búsqueda de puntos de enlace
Extraer coordenadas de las fotografías.
Por lo general, en las fotografías se puede encontrar la información GPS por medio de sus
metadatos EXIF, MicMac ofrece varias opciones para extraer las coordenadas de cada
una de las fotografías, para extraer un listado de coordenadas de cada imagen se utiliza
el comando “mm3d XifGps2Txt” del cual se peude ver el proceso de su ejecución en la
Figura 5-10, que se usará con la siguiente estructura:

54 Procesamiento digital de imágenes obtenidas con dron
“mm3d XifGps2Txt .*JPG OutTxtFile=Coordenadas”
Donde:
• “. *JPG" es el argumento obligatorio que extrae las coordenadas de todas las imágenes que tengan esta extensión.
• “OutTxtFile=Coordenadas” es un argumento opcional y sirve para dar nombre al archivo .txt resultante (en caso de no usar este argumento por defecto se creará el archivo GpsCoordinatesFromExif.txt que contiene la misma información.)
El listado de coordenadas que se exporta se puede ver en la Figura 5-11, se encuentra en
coordenadas elipsoidales, pero también existe la opción de exportar este listado en
radianes o coordenadas geocéntricas.
Figura 5-10: Ejecución comando XifGps2Txt.
Fuente: Elaboración propia (2020)

Capítulo 4 55
Figura 5-11: Archivo Coordenadas.txt.
Fuente: Elaboración propia (2020)
Extraer coordenadas en .xml
MicMac puede trabajar con varios tipos de coordenadas, pero lo ideal es trabajar en un
sistema de coordenadas local (RTL), esto para evitar errores durante el procesamiento
debido a la gran cantidad de dígitos que se pueden generar en algunos tipos de
coordenadas, el comando “XifGps2Xml “ extrae las coordenadas de las fotografías en un
archivo de extensión .Xml, estas coordenadas al pasar por este proceso quedan
convertidas en coordenadas RTL (locales) . la estructura a usar es la siguiente:
“mm3d XifGps2Xml .*JPG CoordXml”
Donde:
• “. *JPG” es el argumento obligatorio el cual extrae las coordenadas en general de todas las imágenes que tengan esta extensión.
• “CoordXml” es un argumento obligatorio para nombrar la carpeta que resulta del proceso y está ligada a la orientación RTL.

56 Procesamiento digital de imágenes obtenidas con dron
El comando genera un archivo Xml general de coordenadas de nombre RTLFromExif que
se puede observar en la Figura 5-12 y una carpeta llamada Ori-CoordXml que tiene
archivos xml con una orientación para cada una de las imágenes.
Figura 5-12: Archivo RTLfromExif.xml.
Fuente: Elaboración propia (2020)
Puntos de enlace
El comando para calcular puntos de enlace entre imágenes se llama Tapioca, ejecutar este
proceso puede tardar de minutos a horas dependiendo la resolución a trabajar, en la Figura
5-13 se puede ver el proceso de su ejecución, la estructura a usar es la siguiente:
“mm3d Tapioca All ".*JPG" 2000”
Donde:
• “All” es el argumento obligatorio para calcular puntos de enlace para todas las imágenes.
• ".*JPG" argumento obligatorio que llama a las imágenes en formato.jp

Capítulo 4 57
• “2000” tamaño de la imagen en pixeles, se utiliza -1 para tomar el tamaño de la imagen completa
Como resultado el comando genera tres carpetas, la carpeta “Homol”, la carpeta “Pastis”
y la carpeta “Tmp-MM-Dir”
Figura 5-13: Ejecución comando Tapioca.
Fuente: Elaboración propia (2020)
5.3.4 Post-Proceso puntos de control
En este apartado se realiza el procesamiento de los puntos de control correspondientes al
vuelo fotogramétrico, proceso que se ejecuta con el software Topcon Tools para este breve
ejemplo.
Como primer paso se debe ejecutar el programa, una vez abierto se abre una ventana
“startup” como se ve en la Figura 5-14 en la cual podemos, crear, abrir, eliminar y borrar
proyectos, para este ejemplo se crea un nuevo proyecto, así que se debe dar clic en el
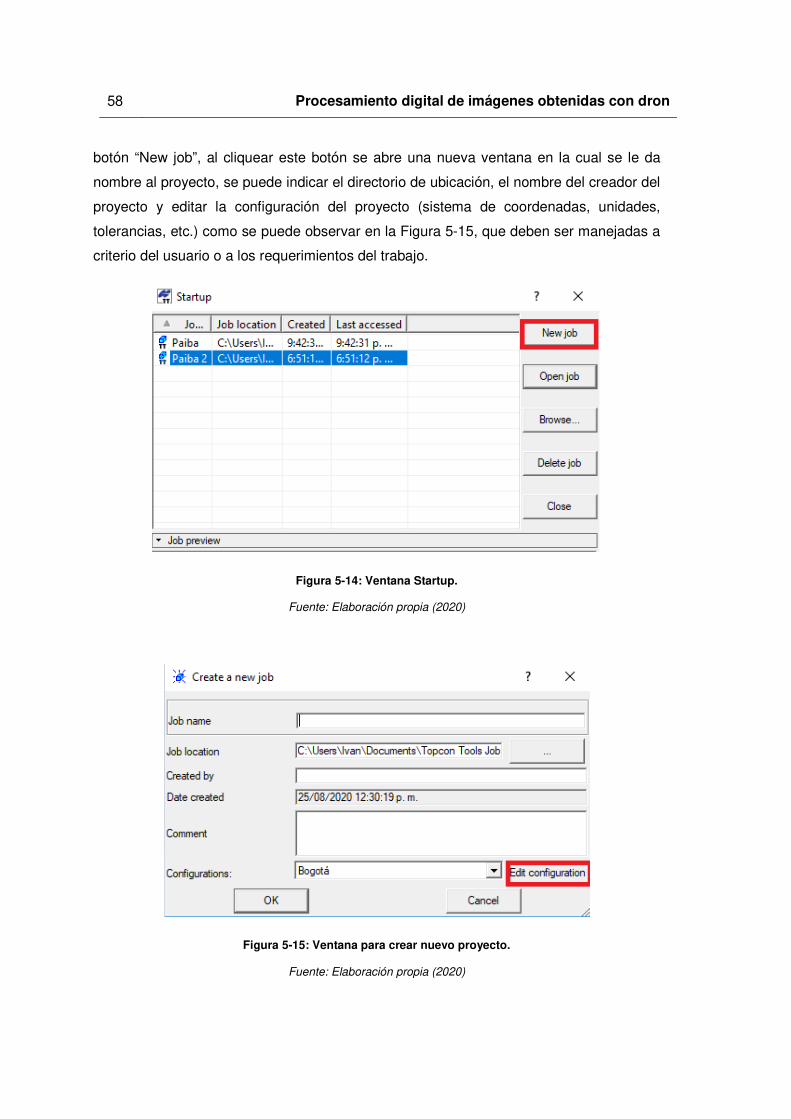
58 Procesamiento digital de imágenes obtenidas con dron
botón “New job”, al cliquear este botón se abre una nueva ventana en la cual se le da
nombre al proyecto, se puede indicar el directorio de ubicación, el nombre del creador del
proyecto y editar la configuración del proyecto (sistema de coordenadas, unidades,
tolerancias, etc.) como se puede observar en la Figura 5-15, que deben ser manejadas a
criterio del usuario o a los requerimientos del trabajo.
Figura 5-14: Ventana Startup.
Fuente: Elaboración propia (2020)
Figura 5-15: Ventana para crear nuevo proyecto.
Fuente: Elaboración propia (2020)

Capítulo 4 59
Establecidos los parámetros, se da clic en el botón “OK” para la creación del proyecto y
apertura de la interfaz del programa. Ahora el paso a seguir es cargar los archivos de
posicionamiento y los datos RINEX previamente descargados, para hacer esto se debe
dar clic en el icono de importar que se muestra en la Figura 5-16.
Figura 5-16: Importar datos.
Fuente: Elaboración propia (2020)
Ya cargados los datos en el programa, en el panel inferior como se muestra en la Figura
5-17 se pueden renombrar los puntos para evitar futuras confusiones, además de esto se
asigna el punto de control horizontal, en la columna “control” seleccionamos la opción
“Both” en el punto denominado (BOGA) como se observa en la Figura 5-18 y asignamos
las coordenadas y altura al mismo, mientras que con los otros puntos en la pestaña “GPS
Occupations” se asigna el tipo de antena utilizada, su altura y el tipo de medición.
Figura 5-17: Ventana de ocupación y panel de ocupación
Fuente: Elaboración propia (2020)

60 Procesamiento digital de imágenes obtenidas con dron
Figura 5-18: Establecer punto de control.
Fuente: Elaboración propia (2020)
Con los anteriores parámetros ya definidos, se procede a realizar el post proceso de la red,
para ello se debe dar clic al icono GPS + PostProcessing, icono que se muestra en la
Figura 5-19, al terminar el Post proceso los vectores de la red cambian de color, si el color
es verde, la red cumple con la configuración de tolerancia dada al momento de crear el
proyecto como se evidencia en la Figura 5-20, pero si alguno de los vectores es rojo,
significa que la red no cumplió las tolerancias, en este caso se deben suprimir datos
intermitentes de los satélites al momento de realizar el posicionamiento y realizar de nuevo
el post proceso.
Figura 5-19: Icono GPS + PostProcessing.
Fuente: Elaboración propia (2020)

Capítulo 4 61
Figura 5-20: Vectores de la red en color verde.
Fuente: Elaboración propia (2020)
Figura 5-21: Icono Adjust network.
Fuente: Elaboración propia (2020)
En el momento que los vectores cumplan con las tolerancias establecidas, se realiza un
ajuste a la red, el cual se ejecuta al dar clic en el icono Adjust network (icono que se puede
ver en la Figura 5-21), este proceso es corto y al terminar genera una ventana con los
resultados del ajuste como se observa en la Figura 5-22.

62 Procesamiento digital de imágenes obtenidas con dron
Figura 5-22: Resultado del ajuste.
Fuente: Elaboración propia (2020)
.
Para finalizar es necesario generar un reporte del ajuste como el que se observa en la
Figura 5-24, el cual se realiza dando clic en la pestaña “Report” y en la pestaña
“Adjustment” como se puede ver en la Figura 5-23. Este reporte incluye diferentes ítems
incluidas las coordenadas de los puntos de control terrestre con los que se trabajar más
adelante y puede ser configurado al oprimir la tecla F9, dependiendo la información que
requiera el usuario.
Figura 5-23: Reporte.
Fuente: Elaboración propia (2020)

Capítulo 4 63
Figura 5-24: Coordenadas de los puntos ajustados.
Fuente: Elaboración propia (2020)
5.3.5 Orientación interna y orientación relativa
Calibración cámara
La fotogrametría se compone de tres pasos:
1. Orientación interna: para determinar los parámetros de la cámara (distancia focal, PPA, PPS, centro de distorsión o parámetros de distorsión).
2. Orientación relativa: para determinar la posición relativa de cada cámara en un sistema de coordenadas arbitrario.
3. Orientación absoluta: para mapear las orientaciones relativas a un sistema de coordenadas escalado y orientado (típicamente WGS84).
En MicMac, los dos primeros pasos generalmente se procesan al mismo tiempo. las
herramientas que realizan orientación interna y relativa son llamadas Tapas, en la Figura
5-25 se puede ver el proceso de la ejecución de este comando.

64 Procesamiento digital de imágenes obtenidas con dron
La estructura a usar es la siguiente:
“mm3d Tapas RadialExtended ".*JPG" Out=Arbitrary SauvAutom=NONE ExpTxt=0”
Donde:
• “RadialExtended” es el argumento obligatorio de distorsión que se desea usar (para más opciones revisar la wiki de MicMac) este en específico se usa para una lente clásica con parámetros de distorsión adicionales.
• ".*JPG" argumento obligatorio que llama a las imágenes en formato.jpg.
• “Out=Arbitrary” argumento no obligatorio que da nombre al directorio de salida, en este caso “Arbitrary” haciendo referencia a una orientación arbitraria.
• “SauvAutom=NONE” argumento no obligatorio para guardar resultados intermedios, se escribe NONE si no se desean ya que el comando los guarda por defecto.
• “ExpTxt=0” argumento no obligatorio para exportar en formato de texto.
Figura 5-25: Ejecución comando Tapas.
Fuente: Elaboración propia (2020)

Capítulo 4 65
De este proceso se generan dos carpetas, la carpeta Ori-Arbitrary y la carpeta Ori-
InterneScan que contienen archivos en xml con la orientación de cada una de las imágenes
procesadas.
Compensación de medidas heterogéneas
Para realizar una compensación de medidas heterogéneas y de puntos de control se utiliza
el comando Campari, en la Figura 5-26 se puede ver el proceso de la ejecución de este
comando, y se utiliza la siguiente estructura:
“mm3d Campari “.*JPG" Arbitrary mascampari”
Donde:
".*JPG” argumento obligatorio que llama a las imágenes en formato.jpg
“Arbitrary” Argumento obligatorio en el que se hace el llamado al directorio de
orientación arbitraria.
“Mascampari” Argumento obligatorio para dar nombre al directorio de salida.
Figura 5-26: Ejecución comando Campari.
Fuente: Elaboración propia (2020)

66 Procesamiento digital de imágenes obtenidas con dron
Como resultado tenemos una carpeta de nombre Ori-mascampari que contiene archivos
en formato .xml de la orientación de cada una de las imágenes procesadas.
Visualización de la orientación
Apericloud es la herramienta de MicMac que genera nubes de puntos dispersas para
obtener una visualización 3D y de la posición de las cámaras, la estructura del comando
usado es la siguiente:
“mm3d Apericloud ".*JPG" Arbitrary Out=AperiCloud.ply ExpTxt=0”
Donde:
".*JPG" argumento obligatorio que llama a las imágenes en formato.jpg
“Arbitrary” Argumento obligatorio en el que se hace el llamado al directorio de
orientación arbitraria.
“Out=AperiCloud.ply” Argumento para nombrar el archivo de extensión .ply para la
posterior visualización de a nube de puntos.
“ExpTxt=0” argumento no obligatorio para exportar en formato de texto.
Como resultado de este comando se genera un archivo en extensión .ply de nombre
Apericloud como se puede observar en la Figura 5-27 que se puede abrir con el software
MeshLab o CloudCompare previamente instalados y un archivo en formato .Xml de
nombre SauvApero con la información de los argumentos aplicados.

Capítulo 4 67
Figura 5-27: Archivo AperiCloud.ply.
Fuente: Elaboración propia (2020)
5.3.6 Orientación absoluta
Transformación de los puntos de control terrestre (GCP) en un sistema de coordenadas
euclidiano adecuado para MicMac; Para realizar esta transformación de coordenadas se
utiliza el comando GCPConvert con la siguiente estructura:
“mm3d GCPConvert AppInFile GCP2.txt [email protected]”
Donde:
“AppInFile” Argumento obligatorio que indica el formato que se desea usar debido
al manejo de la información (para más opciones revisar la wiki de MicMac).

68 Procesamiento digital de imágenes obtenidas con dron
“GCP2.txt” archivo de extensión .txt previamente creado con la información de los
GCP a trabajar (que se puede observar en la Figura 5-28.
Figura 5-28: Archivo GCP2.txt.
Fuente: Elaboración propia (2020)
“[email protected]” argumento no obligatorio para
realizar transformación de coordenadas, en este caso de WGS84 a un sistema de
coordenadas local con el archivo RTLFromExif.xml anteriormente generado.
Genera un archivo de extensión .xml como resultado de la conversión, archivo que se
puede ver en la Figura 5-29.
Figura 5-29: Archivo GCP2.xml.
Fuente: Elaboración propia (2020)
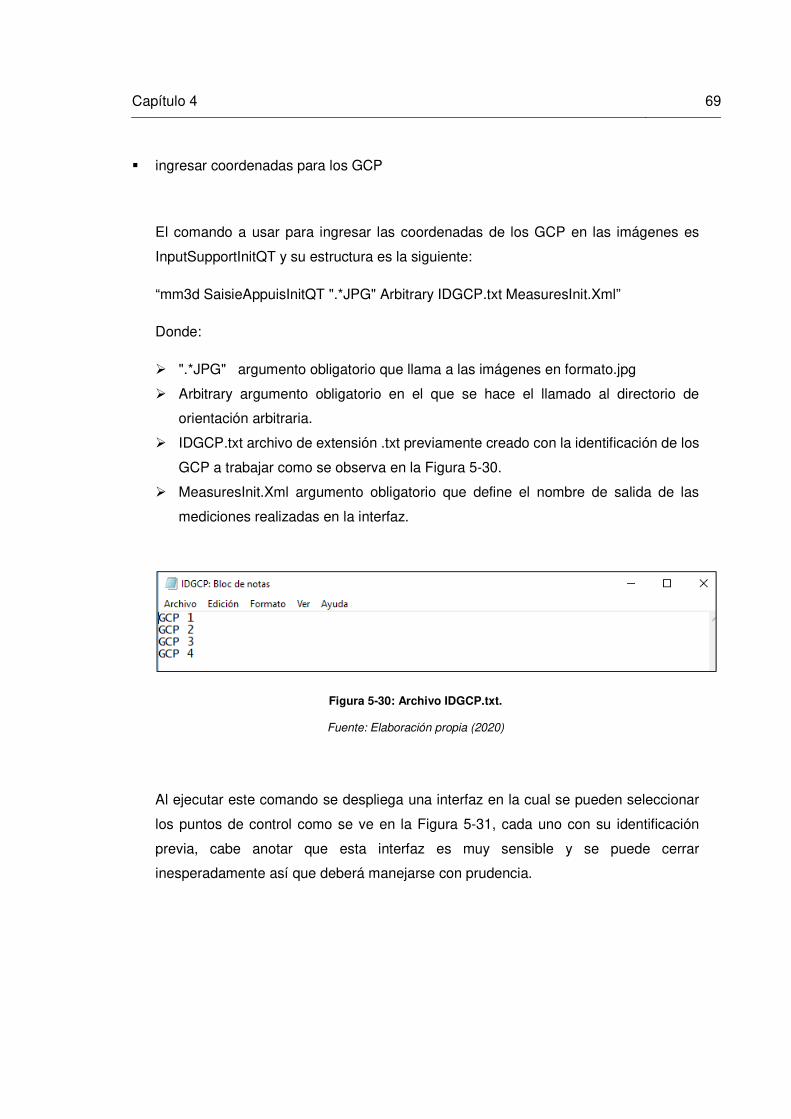
Capítulo 4 69
ingresar coordenadas para los GCP
El comando a usar para ingresar las coordenadas de los GCP en las imágenes es
InputSupportInitQT y su estructura es la siguiente:
“mm3d SaisieAppuisInitQT ".*JPG" Arbitrary IDGCP.txt MeasuresInit.Xml”
Donde:
".*JPG" argumento obligatorio que llama a las imágenes en formato.jpg
Arbitrary argumento obligatorio en el que se hace el llamado al directorio de
orientación arbitraria.
IDGCP.txt archivo de extensión .txt previamente creado con la identificación de los
GCP a trabajar como se observa en la Figura 5-30.
MeasuresInit.Xml argumento obligatorio que define el nombre de salida de las
mediciones realizadas en la interfaz.
Figura 5-30: Archivo IDGCP.txt.
Fuente: Elaboración propia (2020)
Al ejecutar este comando se despliega una interfaz en la cual se pueden seleccionar
los puntos de control como se ve en la Figura 5-31, cada uno con su identificación
previa, cabe anotar que esta interfaz es muy sensible y se puede cerrar
inesperadamente así que deberá manejarse con prudencia.

70 Procesamiento digital de imágenes obtenidas con dron
Figura 5-31: Interfaz SaisieAppuisInitQT.
Fuente: Elaboración propia (2020)
Transformación 3D entre orientación arbitraria y absoluta
Para determinar la transformación 3D entre el sistema arbitrario y el sistema
georreferenciado se utiliza la herramienta GCPBascule, en la Figura 5-32 se puede
observar el proceso de su ejecución, este funciona con la siguiente estructura:
“mm3d GCPBascule ".*JPG" Arbitrary Absol GCP2.Xml MeasuresInit-S2D.Xml”
Donde:
".*JPG" argumento obligatorio que llama a las imágenes en formato.jpg.
“Arbitrary” Argumento obligatorio en el que se hace el llamado al directorio de
orientación arbitraria.

Capítulo 4 71
“Absol” Argumento obligatorio que da el nombre al directorio de orientación de
salida.
“GCP2.Xm”l Archivo de puntos de puntos de control terrestre GCP.
“MeasuresInit-S2D.Xml” archivo de medidas resultante del proceso de
GCPConvert.
Figura 5-32: Ejecución comando GCPBascule.
Fuente: Elaboración propia (2020)
Como resultado del proceso genera una carpeta de nombre Ori-Absol que contiene
información en formato .xml de la orientación absoluta de cada una de las imágenes.
Realizado este proceso se puede ejecutar nuevamente el comando Campari para
obtener una mejor precisión en los datos.
Visualización de la nube de puntos con una orientación absoluta.
Para visualizar la nube de puntos con orientación absoluta nuevamente se ejecuta el
comando Apericloud con la siguiente estructura:
“mm3d AperiCloud ".*JPG" Absol Out=AperiCloud.ply ExpTxt=0”

72 Procesamiento digital de imágenes obtenidas con dron
Que es muy similar a la utilizada antes pero se cambia el directorio de orientación por
Absolut y genera de nuevo un archivo en formato “.ply” con la nube de puntos con la
orientación absoluta.
Cambio del sistema de coordenadas
Para realizar el cambio del sistema de coordenadas usamos el comando ChgSysCo (ver
Figura 5-33 para observar el proceso de su ejecución) con la siguiente estructura:
“mm3d ChgSysCo ".*JPG" Absol RTLFromExif.xml@SysCoMagna_EPSG3116.xml All-
MAGNA”
Donde:
".*JPG" argumento obligatorio que llama a las imágenes en formato.jpg
“Absol” Argumento obligatorio que indica el directorio de orientación
“RTLFromExif.xml@SysCoMagna_EPSG3116.xml” argumento obligatorio que
realiza el cambio de coordenadas local a sistema de coordenadas Gauss
“All-MAGNA” argumento obligatorio para indicar el nombre del directorio de salida

Capítulo 4 73
Figura 5-33: Ejecución comando ChgSysCo.
Fuente: Elaboración propia (2020)
Como resultado de este procesamiento se genera la carpeta Ori-All-MAGNA que contiene
información en formato.xml de cada una de las imágenes con coordenadas Magna.
Visualización de las cámaras.
Este proceso es opcional, pero puede ser de gran utilidad al dar la información visual de la
posición de las cámaras al momento de tomar las fotografías como se puede apreciar en
la Figura 5-34, y se usa la siguiente estructura:
“mm3d AperiCloud ".*.JPG" All-MAGNA Out=All-MAGNA-cam.ply WithPoints=0”

74 Procesamiento digital de imágenes obtenidas con dron
Figura 5-34: Visualización de las cámaras.
Fuente: Elaboración propia (2020)
5.3.7 Generación de productos
Creación de mascara
Es necesario crear una máscara para indicar que parte de la escena del mosaico
rectificado se desea usar, para la ejecución de este proceso se usa el comando Tarama
(ver Figura 5-35Figura 5-33 para observar el proceso de su ejecución) con la siguiente
estructura:
“mm3d Tarama ".*.JPG" All-MAGNA”
Donde:
".*.JPG" argumento obligatorio que llama a las imágenes en formato.jpg
“All-MAGNA” Argumento obligatorio que indica el directorio de orientación

Capítulo 4 75
Figura 5-35: Ejecución comando Tarama.
Fuente: Elaboración propia (2020)
Realizado este proceso se genera la carpeta TA que contiene las máscaras para generar
el ortomosaico, a continuación, se presenta el resultado de la máscara general para el
ortofomosaico como se puede observar en la Figura 5-36 y una carpeta llamada Pyram
con máscaras de cada una de las imágenes

76 Procesamiento digital de imágenes obtenidas con dron
Figura 5-36: Archivo TA_LeChantier.TIF (mascara).
Fuente: Elaboración propia (2020)
Creación de mapa de profundidad
El método que consiste en utilizar todas las imágenes para crear un modelo 3D es la
llamada correlación densa o densificación. En MicMac, se realiza mediante el comando
Malt (para observar el proceso de su ejecución ver la Figura 5-37Figura 5-37) y la
estructura que se usa para realizar dicho proceso es la siguiente:
“mm3d Malt Ortho ".*JPG" All-MAGNA DirMEC=MEC DefCor=0 Regul=0.005 ZoomF=2
DirTA=TA”
Donde:

Capítulo 4 77
“Ortho” es el argumento obligatorio que indica el tipo de Malt a usar (para más
opciones revisar la wiki de MicMac) este en específico se usa para adaptación para
a generación de ortofotos
".*JPG" argumento obligatorio que llama a las imágenes en formato.jpg.
“All-MAGNA” Argumento obligatorio que indica el directorio de orientación.
“DirMEC=MEC” Argumento no obligatorio que nombre la carpeta donde se
guardaran los resultados.
“DefCor=0” correlación predeterminada en pixeles.
“Regul=0.005” Factor de regulización.
“ZoomF=2” Zoom final (2 en orto, 1 en MNE).
“DirTA=TA” Argumento no obligatorio para indicar el directorio que contiene la
máscara a usar.
Figura 5-37: Ejecución comando Malt.
Fuente: Elaboración propia (2020)
Creación del orto mosaico
La herramienta para la creación del ortomosaico se llama tawny, es una herramienta
bastante simple porque supone que los datos se han preparado y organizado

78 Procesamiento digital de imágenes obtenidas con dron
correctamente durante todo el proceso, el trabajo de tawny es fusionar los datos generados
anteriormente por la herramienta Malt, la estructura a utilizar es la siguiente:
“mm3d Tawny Ortho-MEC”
Donde:
“Ortho-MEC” va a ser el argumento obligatorio que define el directorio de salida
Genera las carpetas Ortho-MEC y MEC, la primera contiene cada una de las fotografías
con la orientación absoluta, algunas fotos de profundidad en escala de grises como se
puede ver en la Figura 5-40 y el Ortofotomosaico en la Figura 5-38, la segunda contiene
imágenes de mascaras generadas automáticamente como se observa en la Figura 5-39
Figura 5-38: Ortofotomosaico.
Fuente: Elaboración propia (2020)

Capítulo 4 79
Figura 5-39: Archivo Ort_DJI_0050.
Fuente: Elaboración propia (2020)

80 Procesamiento digital de imágenes obtenidas con dron
Figura 5-40: Archivo Correl_STD-MALT_Num_7.
Fuente: Elaboración propia (2020)
Creación de la nube de puntos densa
El comando C3DC es el comando que calcula automáticamente una nube de puntos a
partir de un conjunto de imágenes orientadas (ver Figura 5-41 para observar el proceso de
su ejecución). La estructura a usar es la siguiente:

Capítulo 4 81
“mm3d C3DC QuickMac ".*JPG" All-MAGNA Out=modele3D.ply PlyCoul=1”
Donde:
“QuickMac” Argumento obligatorio que determina la calidad del procesamiento
(para más opciones revisar la wiki de MicMac).
".*JPG" argumento obligatorio que llama a las imágenes en formato.jpg
“All-MAGNA” Argumento obligatorio que indica el directorio de orientación.
“Out=modele3D.ply” Argumento no obligatorio para dar nombre al archivo de
extensión .ply resultante
“PlyCoul=1” Argumento no obligatorio para dar color en el archivo de extensión .ply
Al finalizar el proceso se genera la carpeta PIMs-QuickMac que contiene imágenes que
corresponden a la nube de puntos de profundidad como se observa en la Figura 5-42 y el
archivo modele3D.ply que contiene el modelo 3D resultante que se puede apreciar en la
Figura 5-43.
Figura 5-41: Ejecución C3DC.
Fuente: Elaboración propia (2020)

82 Procesamiento digital de imágenes obtenidas con dron
Figura 5-42: Archivo Nuage-Depth-DJI_0081.JPG_Masq.
Fuente: Elaboración propia (2020)

Capítulo 4 83
Figura 5-43: Modelo 3D.
Fuente: Elaboración propia (2020)
5.4 Fase IV: Análisis de los datos
A partir de la experiencia adquirida tras hacer el procesamiento digital de imágenes
obtenidas con dron usando el software de uso libre MicMac, se puede decir que esta
alternativa ofrece resultados óptimos, en primer lugar, hay que tener en cuenta la calidad
de los productos frente a otros software.
Comparados los resultados de MicMac con dos software comerciales (Agisoft PhotoScan
y Pix4D) se deduce que MicMac al ser gratuito genera productos de alta calidad y puede
competir con varios software con el mismo objetivo, la desventaja de MicMac frente a los
software comerciales, es que este está enfocado principalmente a usuarios con
conocimientos en el área de la fotogrametría, mientras que los software comerciales
presentan bastantes facilidades en su uso y están superiormente automatizados, lo que
los hace accesible a personas incluso sin previos conocimientos de fotogrametría.
5.4.1 Impacto
Se piensa que usar un software libre para hacer procesamiento digital de imágenes puede
ser una alternativa beneficiosa en el aspecto educativo, económico y legal. La obtención
de sus productos finales de acuerdo con su calidad contribuirá a su divulgación,
comprensión y total aprovechamiento por estudiantes, docentes y profesionales; es de
gran importancia, el hacer uso de varias herramientas para conocer el alcance del software
y en este caso sus diferentes aplicaciones.

84 Procesamiento digital de imágenes obtenidas con dron
5.4.2 Limitaciones
Para hacer un uso adecuado de el software y sacar el mejor provecho de este es necesario
tener conocimientos básicos del manejo de la consola de Windows o de las otras
plataformas que ejecutan el software y un nivel intermedio de inglés debido a que la mayor
cantidad de información y los comandos para ejecutar la herramienta se encuentran en
este idioma
Las principales limitaciones de MicMac son la complejidad de la configuración y, para
algunas aplicaciones, la velocidad de ejecución. Estas limitaciones pueden dificultar
algunos de los usos operativos de MicMac, pero no se bloquean en un entorno de
investigación donde los criterios de prioridad son el uso general y la calidad de las
soluciones. (Pinte, 2017)

6. Conclusiones y recomendaciones
6.1 Conclusiones
con el desarrollo de este proyecto se pretende abrir una pequeña puerta a la exploración
de los diversos software de procesamiento digital de imágenes de uso libre que existen;
aunque la mayoría tienen diferencias en su metodología y/o interfaz, su estructura es muy
similar.
Es importante tener muchos conceptos fotogramétricos claros antes de empezar a trabajar
con los softwares de procesamiento digital, además de haber leído previamente la
documentación de cada uno, esto para tener una mayor fluidez, optimizar los tiempos de
trabajo y poder resolver futuras inquietudes.
MicMac al no tener una interfaz para hacer el procesamiento digital de imágenes, genera
una pequeña ventaja al realizar paso a paso cada proceso, lo cual permite tener un mayor
nivel de detalle en todo su procedimiento y cierto control en el proceso de cada tarea.
6.2 Recomendaciones
Los tiempos de procesamiento serán directamente proporcionales a la calidad que se
requiera en los resultados, cabe anotar que se recomienda realizar estos procesos en
computadores que tengan buenas especificaciones técnicas, ya que esto puede ahorrar
bastante tiempo.
86 Procesamiento digital de imágenes obtenidas con dron
MicMac maneja una extensa cantidad de herramientas que no se alcanzan a contemplar
en su totalidad en este trabajo, se recomienda revisar la documentación de MicMac para
usar otro tipo de herramientas, profundizar en las ejecutadas en este proyecto y explorar
otras aplicaciones del Software.
Uno de los grandes problemas para el uso de MicMac en regiones de habla hispana es la
poca información que se encuentra de este en idioma español, es necesario indagar en el
foro del software y hacer uso de las diferentes herramientas de traducción para facilitar
este aspecto.

A. Anexo: Tutorial MicMac

88 Bibliografía
Bibliografía
Aerial Insights SL. (2019). Aerial Insights . Obtenido de Aerial Insights SL.:
http://www.aerial-insights.co/blog/tipos-de-drones/
Aguirre, N. (1998). Principios Básicos de Cartografía Temática. Bogotá: Instituto
Geográfico Agustín Codazzi.
Alicevision. (s.f.). Obtenido de https://alicevision.org/
CEUPE. (7 de Diciembre de 2018). Centro Europeo de Postgrado. Obtenido de Ceupe:
https://www.ceupe.com/blog/fotogrametria-analitica-y-digital.html
Cruz, M. (2008). Caracterización de puntos de control en teledetección: Aplicación de la
corrección geométrica automática de imágenes.
Delgado, V. (6 de Febrero de 2019). ELDRONE. Obtenido de ELDRONE:
http://eldrone.es/historia-de-los-drones/
Domínguez, A. (1996). Procesamiento digital de imágenes. Distrito Federal, México:
Perfiles Educativos.
Fallas, J. (2007). Modelos digitales de elevación: Teoría, métodos de interpolación y
aplicaciones.
Ferreira, M. R., & Aira, V. G. (2017). Aplicaciones topográficas de los drones.
Garcia, P., & Ortiz, E. (2012). Influencia del GSD en la orientación de un bloque
fotogrametrico. universidad del pais vasco.

Bibliografía 89
González, R., & Woods, R. (2002). Digital Image Processing. New Jersey.
Granshaw, S. I., & Fraser, C. S. (2015). Computer Vision and Photogrammetry: Interaction
or Introspection? The Photogrammetric Record, 3-7.
HÉLICÉO-Geomatic Innovation&Technology. (2019). HÉLICÉO. Obtenido de HÉLICÉO:
http://www.heliceo.com/es/produits-pour-geometres/fusion-dron-avion-vtol/
IGAC. (2016). Especificaciones técnicas cartografía básica digital.
Lowe, D. G. (2004). Distinctive image features from scale-invariant keypoints. International
Journal of Computer Vision, 91-110.
MicMac, C. (2017). MicMac wiki. Obtenido de
https://micmac.ensg.eu/index.php/Presentation
Morales, A. (2019). MappingGIS. Obtenido de
https://mappinggis.com/2019/08/opendronemap-crea-mapas-con-imagenes-
capturadas-por-drones/
Ortega, D., García, J., Vergara, R., Sanz , S., Hernández, A., & Ramos , D. (2016). Piloto
de dron RPAS.
Ortiz, M. M. (2013). Procesamiento Digital de Imágenes. Puebla: Universidad Autónoma
de Puebla.
Pachón. (2016). Practica de proyecciones.
Pereira, J. (8 de Octubre de 2012). Digital Heritage. Obtenido de
http://www.jpereira.net/software-revisiones-y-consejos/introducicon-a-la-
fotogrametria-parte-1
Pérez Rivero. (2010). Ecured. Obtenido de https://www.ecured.cu/Software_libre
Pérez, J. A. (2001). Apuntes De Fotogrametría III. Merida: Universidad De Extremadura.
Pierrot-Deseilligny, & Clery. (2011). Apero, an open source bundle adjustment software for
automatic calibration and orientation of set of images. 835-846.

90 Bibliografía
Pierrot-Deseilligny, & Paparoditis. (2006). A multiresolution and optimization-based image
matching approach. Arch Photogramm Remote Sens Spat.
Quirós, E. (2014). Introducción a la Fotogrametría y Cartografía aplicadas a la Ingeniería
Civil. Cáceres: Universidad de Extremadura.
regard3d. (s.f.). Obtenido de https://www.regard3d.org/index.php/documentation
Rupnik, E., Daakir, M., & Pierrot Deseilligny , M. (2017). MicMac – a free, open-source
solution for photogrammetry. Open geospatial data.
Sánchez, J. (2006). Introducción a la fotogrametría. E.T.S.I. Caminos, canales y puertos.
Santamaría, J. (2011). La cartografía y las proyecciones cartográficas. Universidad de La
Rioja.
Schonberger, Zheng, Pollefeys, & Frahm. (2016). Conference on Computer Vision and
Pattern Recognition. Obtenido de https://colmap.github.io/#
Snavely, N., Seitz, S., & Szeliski, R. (2006). Photo tourism: exploring photo collections in
3D. SIGGRAPH '06, 835-846.
Übel, M. (2020). 2020 Best Photogrammetry Software (Some are Free). ALL3DP .