Network Communities: Something Old, Something New, Something Borrowed?

Has Something Changed Here? Autonomous Difference Detection for
Security Patrol Robots
IROS 2007, San Diego, CA, USA
Henrik Andreasson, Martin Magnusson, Achim Lilienthal
AASS Learning Systems Lab, Örebro University, Sweden

Henrik Andreasson, Martin Magnusson and Achim Lilienthal
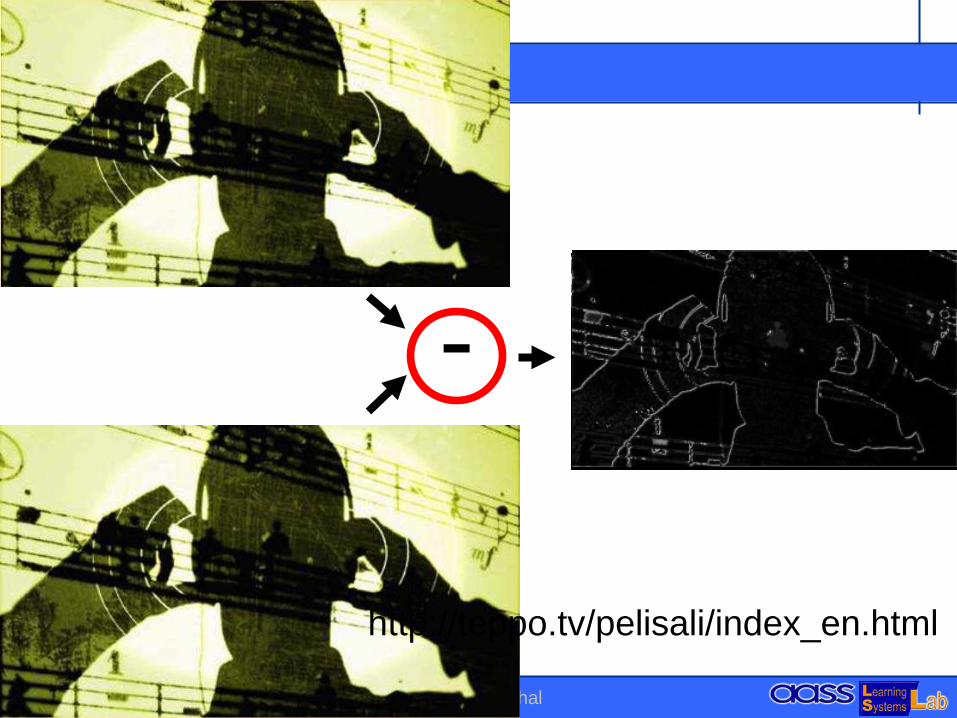
Find five errors…
- ?
Henrik Andreasson, Martin Magnusson and Achim Lilienthal
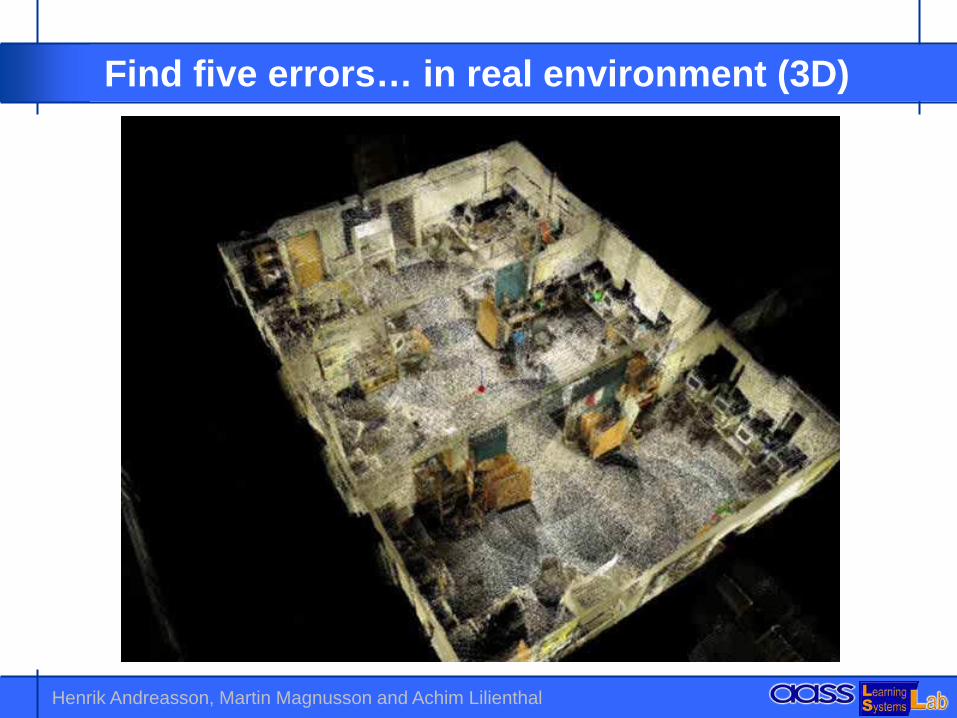
Find five errors… in real environment (3D)

Henrik Andreasson, Martin Magnusson and Achim Lilienthal
1. Motivation
2. Methods involved
1. Registration / Mapping
2. Localization
3. Difference meassure
3. Experimental results
4. Conclusions
Contents
-
Henrik Andreasson, Martin Magnusson and Achim Lilienthal
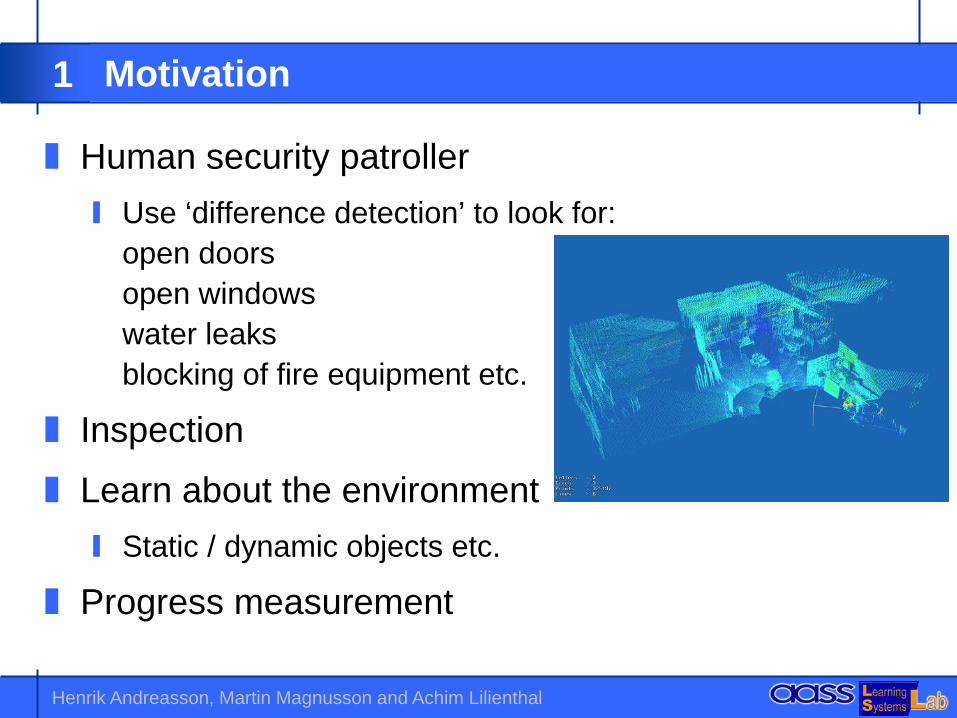
Motivation
Human security patroller
Use ‘difference detection’ to look for: open doors open windows water leaks blocking of fire equipment etc.
Inspection
Learn about the environment
Static / dynamic objects etc.
Progress measurement
1
Henrik Andreasson, Martin Magnusson and Achim Lilienthal
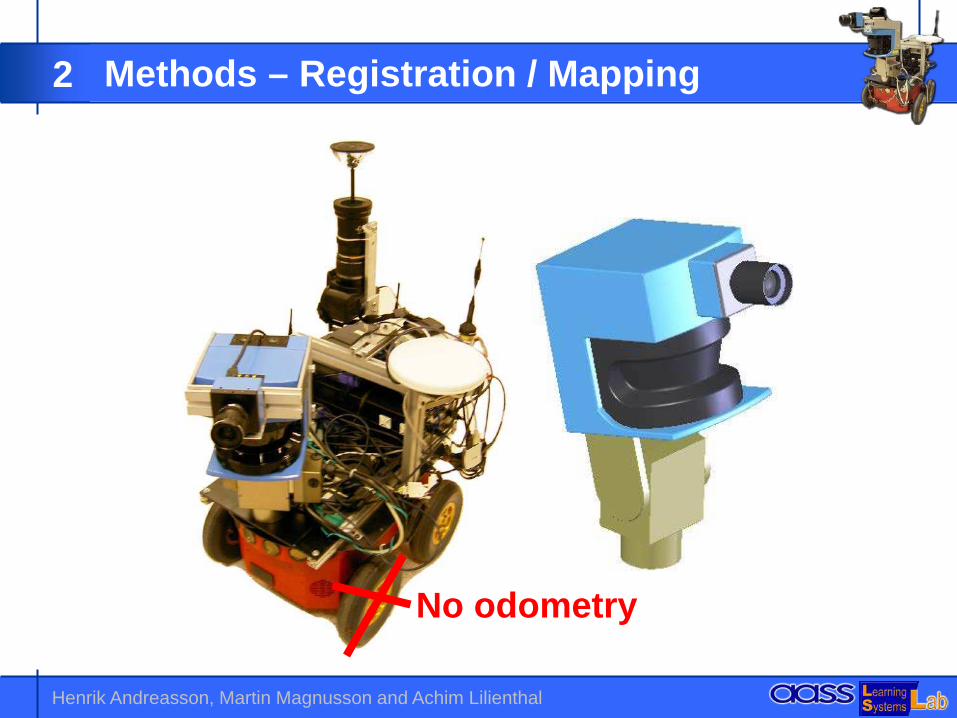
Methods – Registration / Mapping
2
No odometry
Henrik Andreasson, Martin Magnusson and Achim Lilienthal
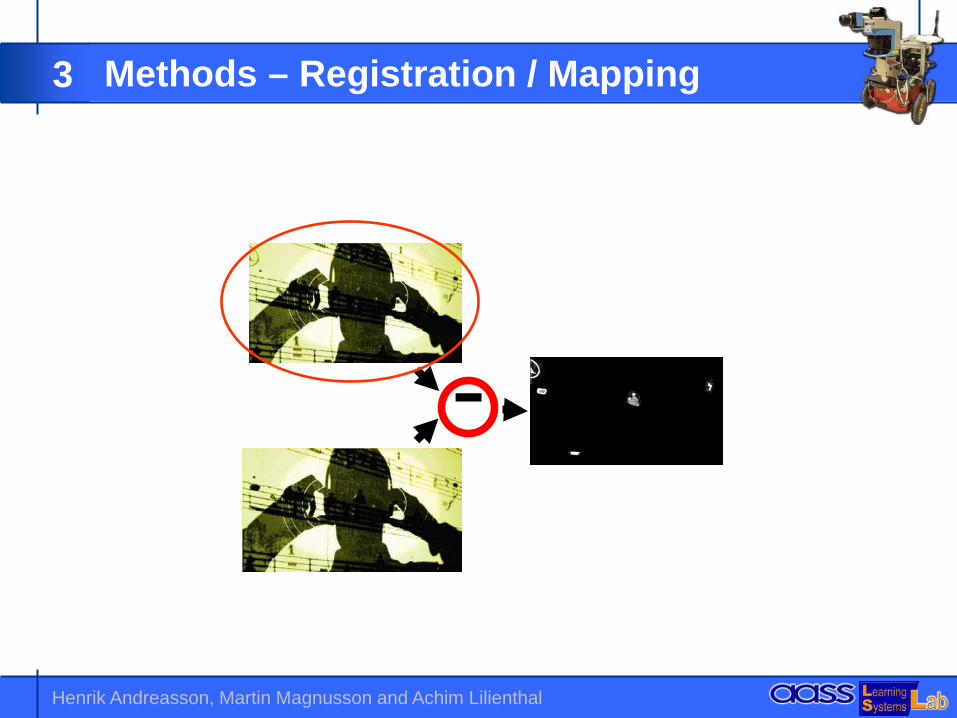
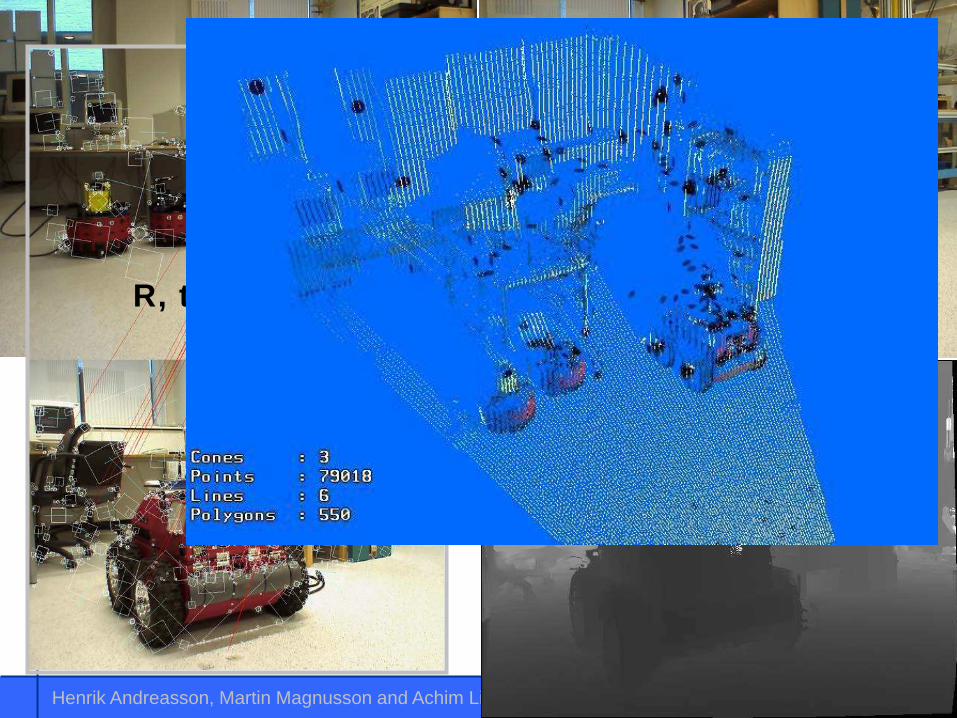
Methods – Registration / Mapping
3
-
Henrik Andreasson, Martin Magnusson and Achim Lilienthal
R, t
Henrik Andreasson, Martin Magnusson and Achim Lilienthal
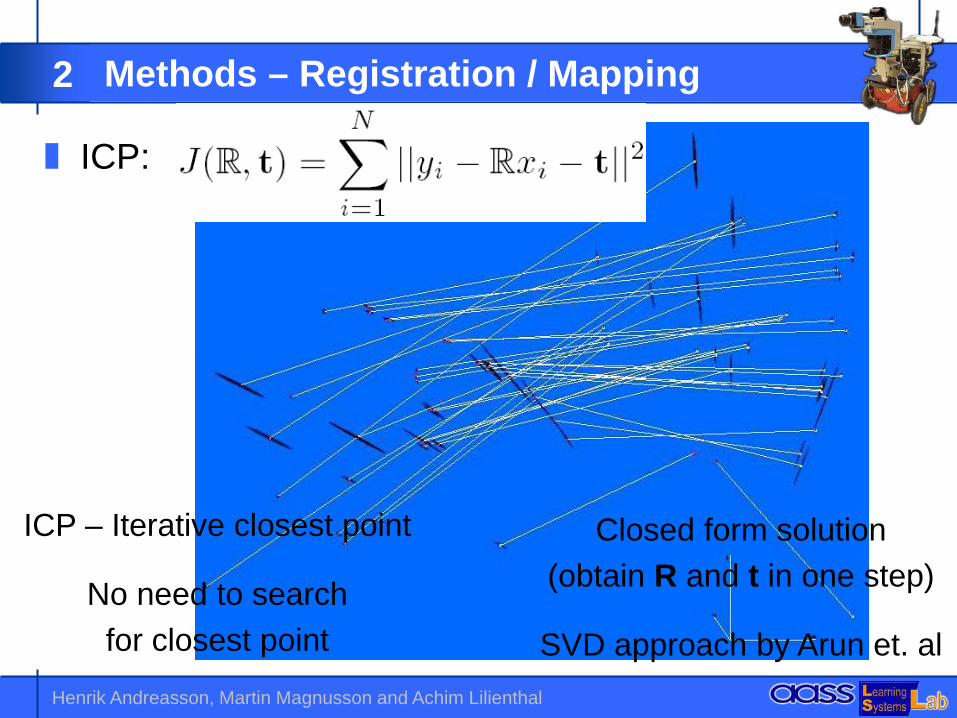
Methods – Registration / Mapping
ICP:
Closed form solution (obtain R and t in one step)
SVD approach by Arun et. al
2
ICP – Iterative closest point
No need to search for closest point

Henrik Andreasson, Martin Magnusson and Achim Lilienthal
Methods – Registration / Mapping
2
Wrong correspondences
Use a ’trimmed’ version: use 70% of the closest pairs
(=iterative method)
Henrik Andreasson, Martin Magnusson and Achim Lilienthal
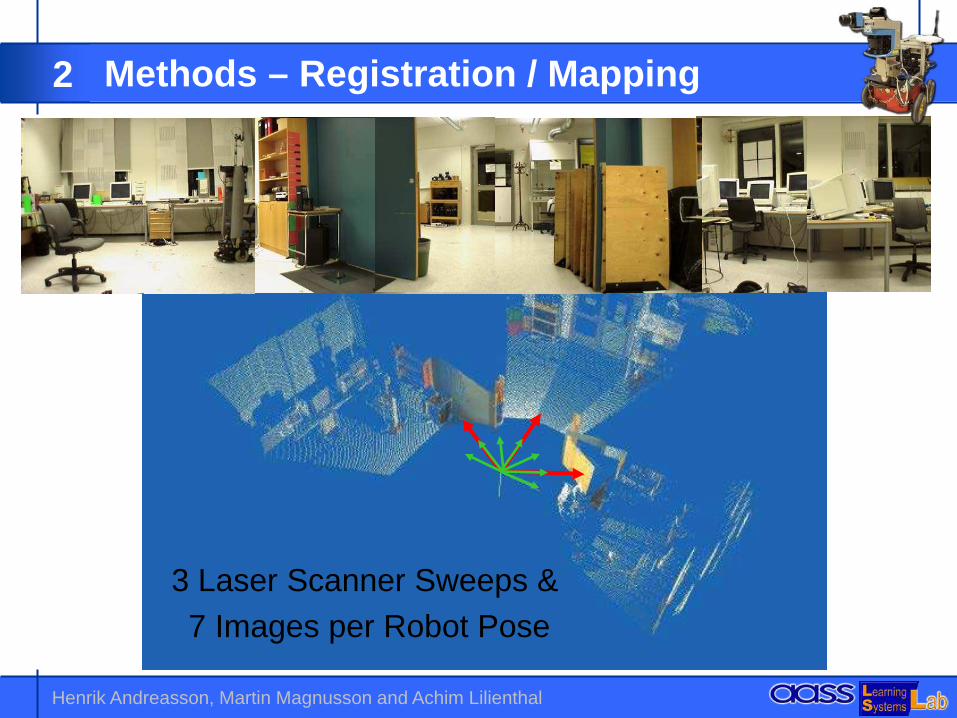
Methods – Registration / Mapping 2
3 Laser Scanner Sweeps & 7 Images per Robot Pose

Henrik Andreasson, Martin Magnusson and Achim Lilienthal
Methods – Registration / Mapping
22 Robot Poses (3 scans + 7 images each)
Incremental Registration
2
Henrik Andreasson, Martin Magnusson and Achim Lilienthal
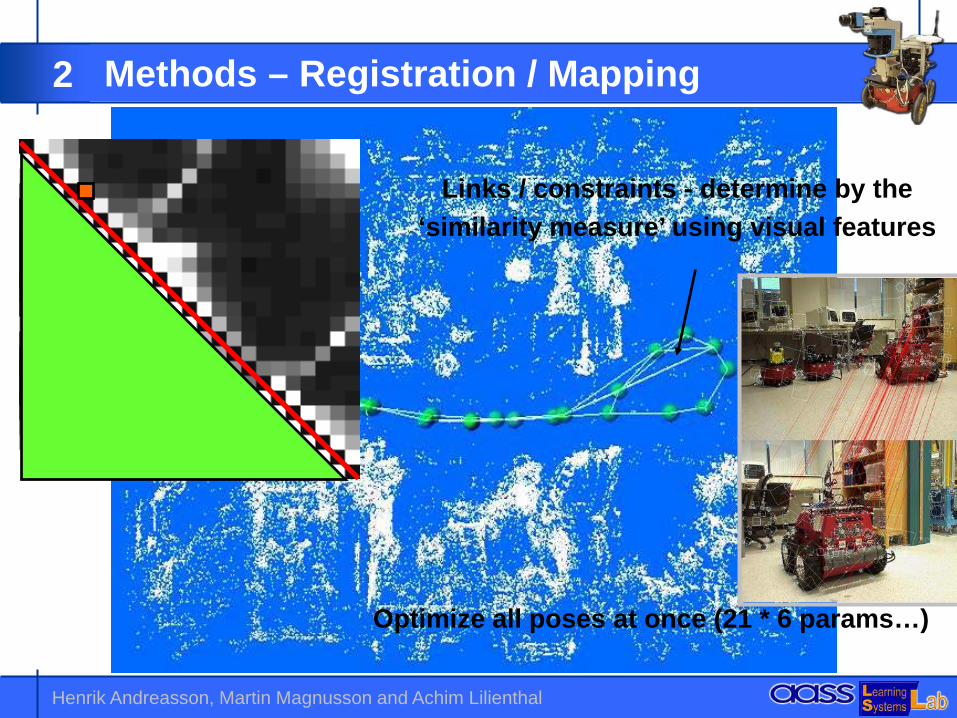
Methods – Registration / Mapping 2
Links / constraints - determine by the ‘similarity measure’ using visual features
Optimize all poses at once (21 * 6 params…)
Henrik Andreasson, Martin Magnusson and Achim Lilienthal
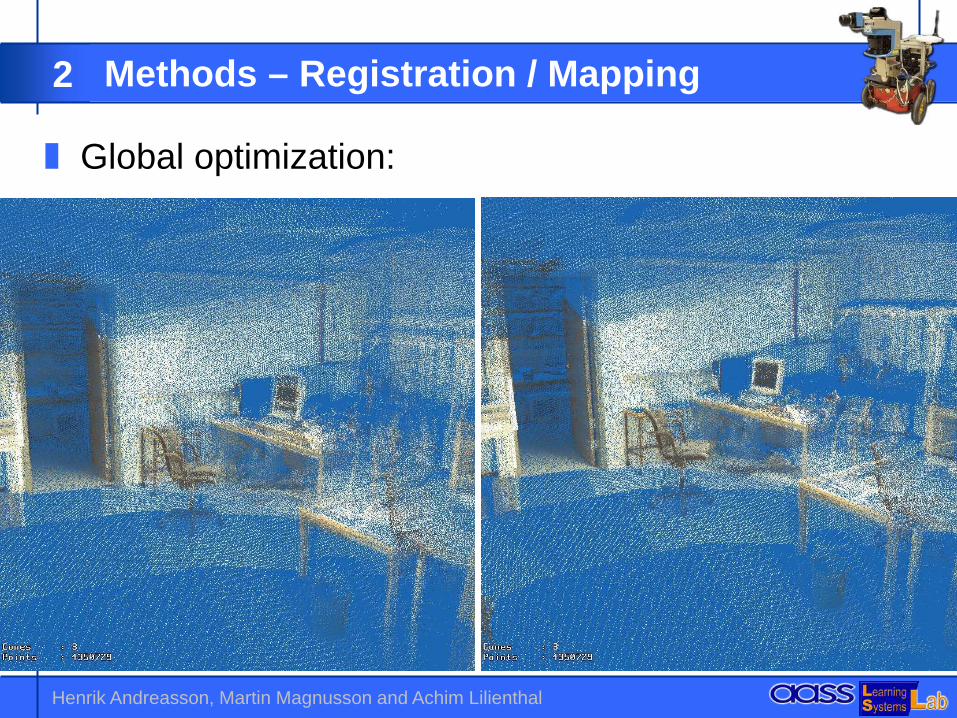
Methods – Registration / Mapping
Global optimization:
2
Henrik Andreasson, Martin Magnusson and Achim Lilienthal
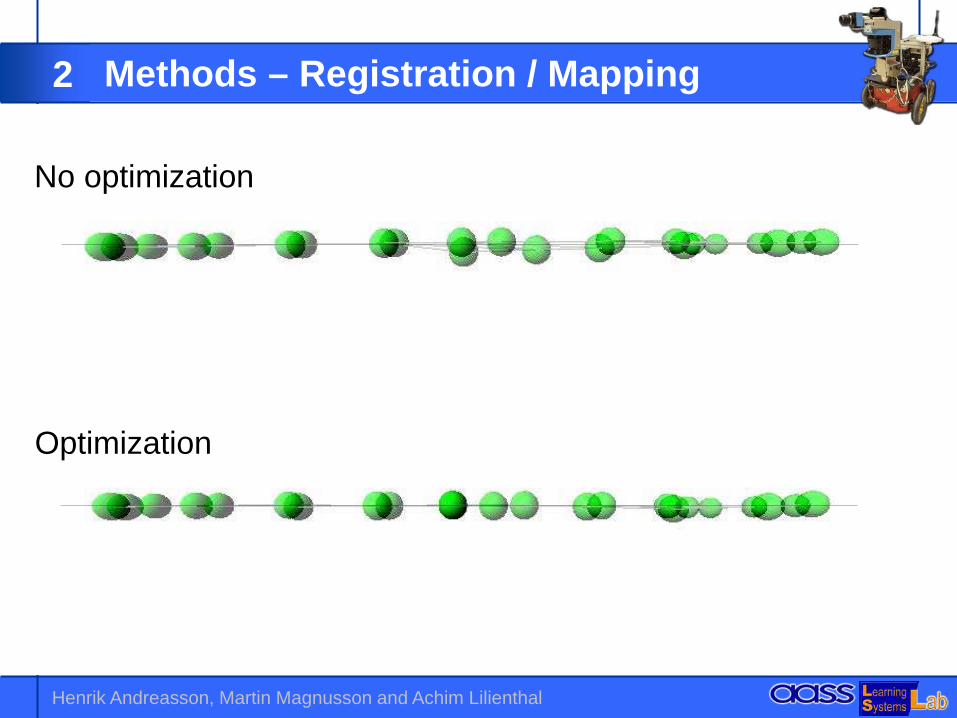
Methods – Registration / Mapping
No optimization
Optimization
2
Henrik Andreasson, Martin Magnusson and Achim Lilienthal
Methods – Localization
3
-

Henrik Andreasson, Martin Magnusson and Achim Lilienthal
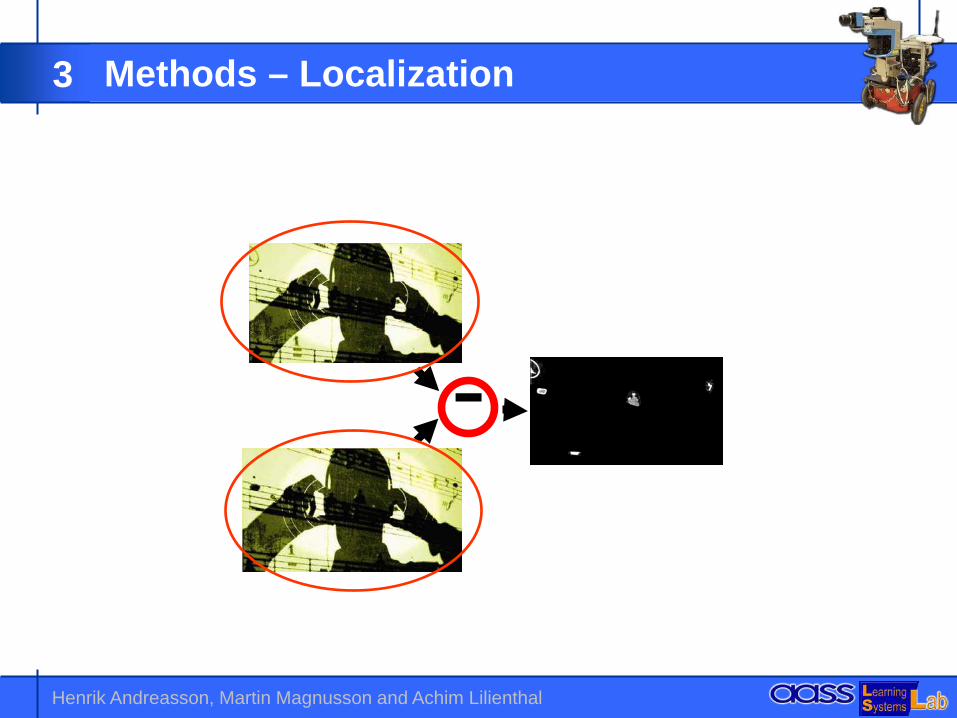
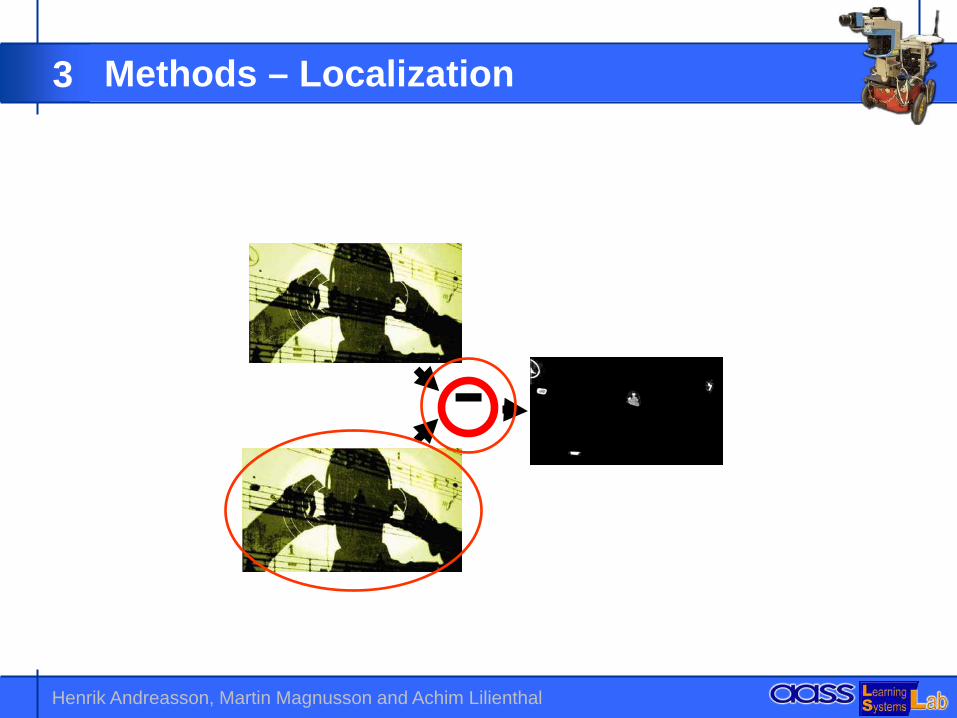
Methods – Localization
3
New readings
Old readings
Henrik Andreasson, Martin Magnusson and Achim Lilienthal
Methods – Localization
3
-

Henrik Andreasson, Martin Magnusson and Achim Lilienthal
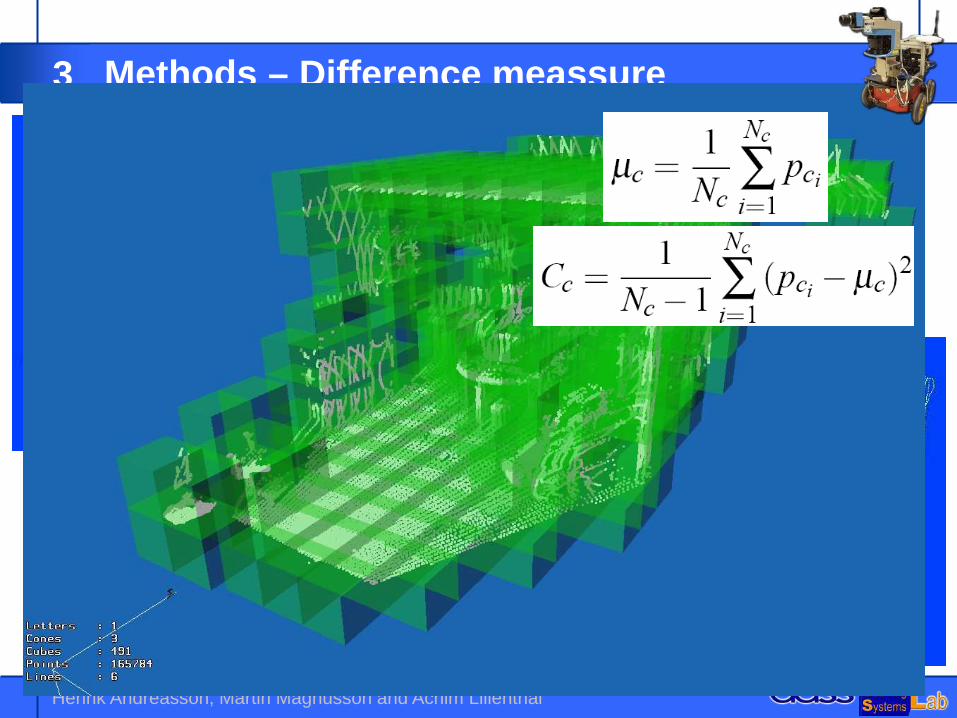
Methods – Difference meassure
3
-
Henrik Andreasson, Martin Magnusson and Achim Lilienthal
Methods – Difference meassure
3
Henrik Andreasson, Martin Magnusson and Achim Lilienthal
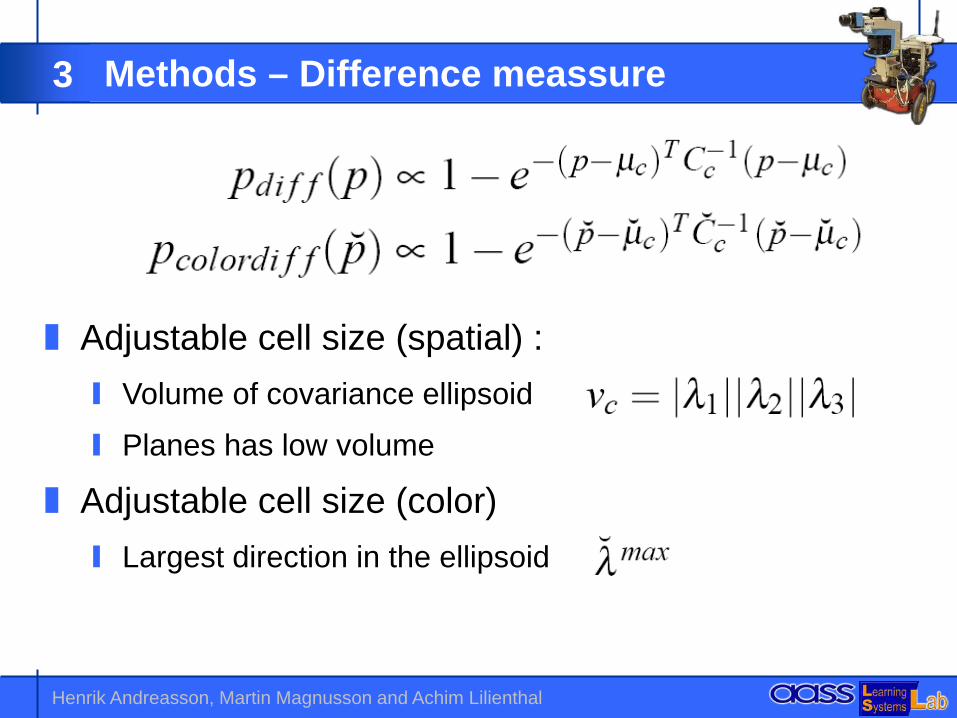
Methods – Difference meassure
Adjustable cell size (spatial) :
Volume of covariance ellipsoid
Planes has low volume
Adjustable cell size (color)
Largest direction in the ellipsoid
3
Henrik Andreasson, Martin Magnusson and Achim Lilienthal
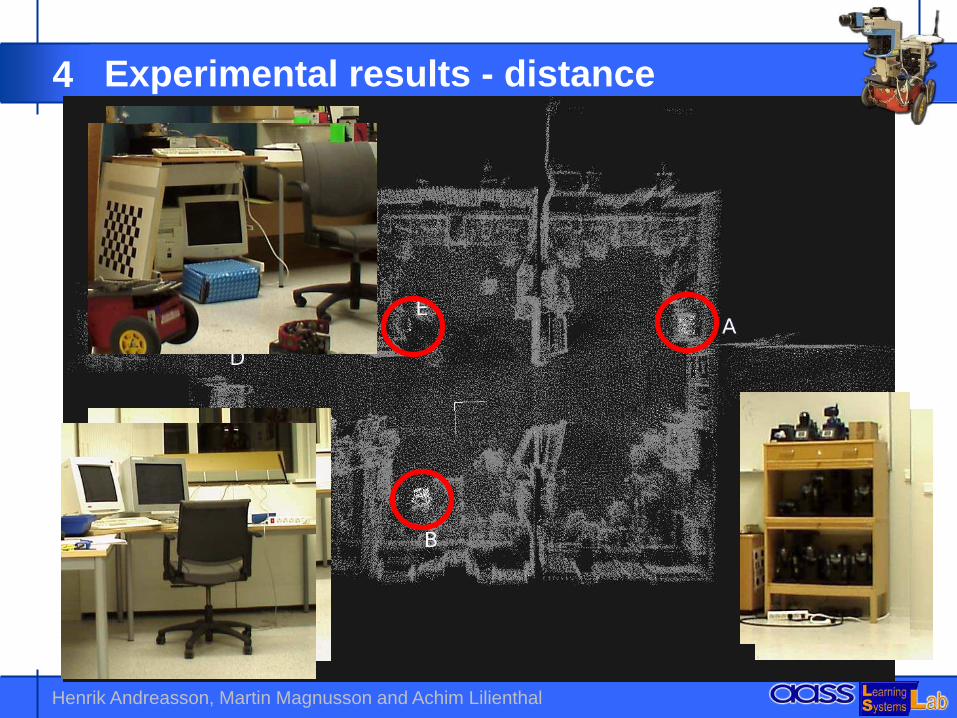
Experimental results - distance
4
Henrik Andreasson, Martin Magnusson and Achim Lilienthal
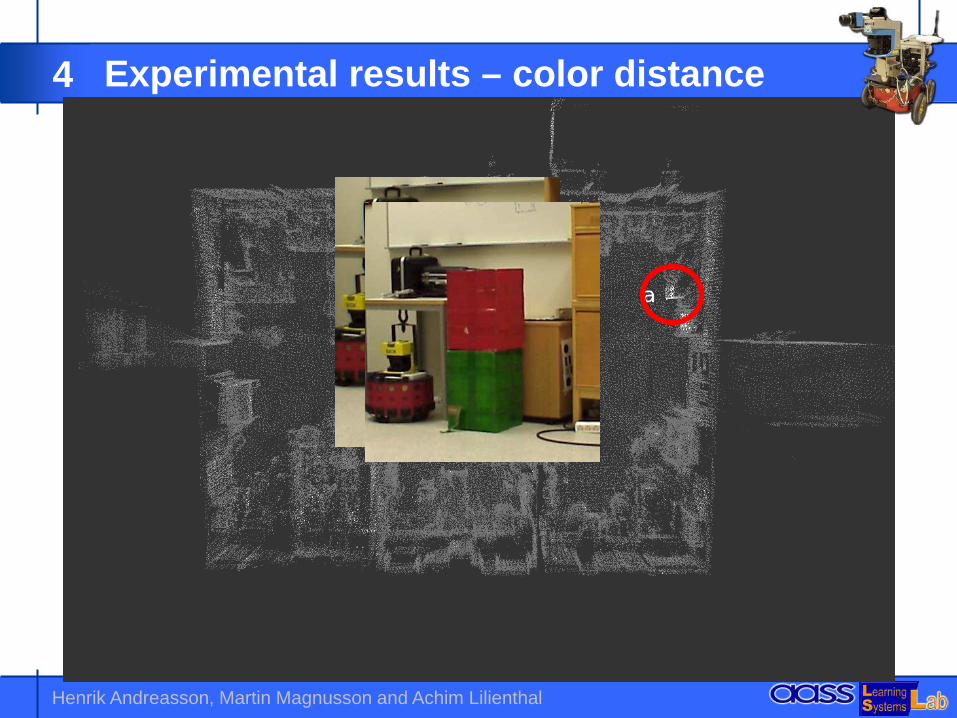
Experimental results – color distance
4
Henrik Andreasson, Martin Magnusson and Achim Lilienthal
Conclusions
Difference detection method
Odometry free registration method
Global optimization
Appearance and registration based localization
Tested in indoor laboratory environment
More evaluation
larger sets, outdoors
Improving accuracy/resolution
Use images “directly”
5

Henrik Andreasson, Martin Magnusson and Achim Lilienthal
Questions?

Henrik Andreasson, Martin Magnusson and Achim Lilienthal
Additional Registration Results
Henrik Andreasson, Martin Magnusson and Achim Lilienthal
Find five errors…
- ?
http://teppo.tv/pelisali/index_en.html
Copyright © 2022 FDOKUMEN