![AAS 36 [1944] - ACTA APOSTOLICAE SEDIS](https://static.fdokumen.com/doc/165x107/6336bae8f9931c1e270fd06b/aas-36-1944-acta-apostolicae-sedis.jpg)
Preprint) AAS 12-115 INVERSE PROBLEM FORMULATION COUPLED WITH UNSCENTED KALMAN FILTERING FOR STATE...
16
(Preprint) AAS 12-115 INVERSE PROBLEM FORMULATION COUPLED WITH UNSCENTED KALMAN FILTERING FOR STATEAND SHAPE ESTIMATION OF SPACE OBJECTS Laura S. Henderson ∗ , Pulkit Goyal † and Kamesh Subbarao ‡ This work addresses issues related to resolving space objects i.e. Space Situational Awareness (SSA). The motivation behind this paper is to further current techniques used to estimate states associated with non-resolved space objects. Furthermore, this work deals with an inverse problem for a system of nonlinear stochastic dif- ferential equations. This system of equations corresponds to the two body orbit equations along with models accounting for effects of atmospheric drag, solar ra- diation pressure, and Earth’s aspherical shape. The present work implements an Unscented Kalman filter (UKF) in conjunction with a batch estimation loop. The UKF estimates the states and parameters of the resident space object (RSO) until a pre-determined measurement batch size criterion is met. The estimates are then passed to the batch loop where a cost function is minimized to improve the esti- mates of the RSO’s parameters further. The batch loop is implemented using two methods; the first uses the Levenberg-Marquardt technique while the second uses a Gauss-Newton algorithm. Moreover, two experiments are conducted. The first experiment uses the traditional UKF implementation and is treated as the bench- mark for the implementation of the batch loop. The second experiment uses the UKF along with the batch loop. The implementation of the batch loop shows a slight improvement over the traditional UKF implementation. INTRODUCTION For the past five decades we have been accumulating objects in space. Many of these objects are satellites that no longer work, pieces of used rocket stages, and remnants from collisions. Over the last decade the number of these objects has increased dramatically. This has become a critical problem that must be addressed with urgency as it could have a detrimental effect on functioning space assets. Objects that are placed in space such as satellites are of great importance to our communications, national security, and economy. Much of the global connectivity technology relies heavily on these satellites. In addition to satellites the International Space Station (ISS) is at an even higher risk due to its large size. It is of great importance to address the issue of identifying these objects and have the ability to predict where these objects will be at any given time and if they pose a risk to other space objects. The motivation for this paper is the belief that it is necessary to develop means to detect, track, identify, and predict the future intentions, actions, and positions of space objects with adequate precision and accuracy. In addition to this, means to determine the origin of these objects along with any change in their orbital state must be generated. * Graduate Student, Mechanical and Aerospace Engineering Department, University of Texas at Arlington, 500 West First Street, Woolf Hall 106. † Visiting Student, Mechanical and Aerospace Engineering Department, University of Texas at Arlington ‡ Associate Professor, Mechanical and Aerospace Engineering, University of Texas at Arlington, 500 West First Street, Woolf Hall 315G 1
Transcript of Preprint) AAS 12-115 INVERSE PROBLEM FORMULATION COUPLED WITH UNSCENTED KALMAN FILTERING FOR STATE...

(Preprint) AAS 12-115
INVERSE PROBLEM FORMULATION COUPLED WITHUNSCENTED KALMAN FILTERING FOR STATE AND SHAPE
ESTIMATION OF SPACE OBJECTS
Laura S. Henderson∗, Pulkit Goyal† and Kamesh Subbarao‡
This work addresses issues related to resolving space objects i.e. Space SituationalAwareness (SSA). The motivation behind this paper is to further current techniquesused to estimate states associated with non-resolved space objects. Furthermore,this work deals with an inverse problem for a system of nonlinear stochastic dif-ferential equations. This system of equations corresponds to the two body orbitequations along with models accounting for effects of atmospheric drag, solar ra-diation pressure, and Earth’s aspherical shape. The present work implements anUnscented Kalman filter (UKF) in conjunction with a batch estimation loop. TheUKF estimates the states and parameters of the resident space object (RSO) untila pre-determined measurement batch size criterion is met. The estimates are thenpassed to the batch loop where a cost function is minimized to improve the esti-mates of the RSO’s parameters further. The batch loop is implemented using twomethods; the first uses the Levenberg-Marquardt technique while the second usesa Gauss-Newton algorithm. Moreover, two experiments are conducted. The firstexperiment uses the traditional UKF implementation and is treated as the bench-mark for the implementation of the batch loop. The second experiment uses theUKF along with the batch loop. The implementation of the batch loop shows aslight improvement over the traditional UKF implementation.
INTRODUCTION
For the past five decades we have been accumulating objects in space. Many of these objects
are satellites that no longer work, pieces of used rocket stages, and remnants from collisions. Over
the last decade the number of these objects has increased dramatically. This has become a critical
problem that must be addressed with urgency as it could have a detrimental effect on functioning
space assets. Objects that are placed in space such as satellites are of great importance to our
communications, national security, and economy. Much of the global connectivity technology relies
heavily on these satellites. In addition to satellites the International Space Station (ISS) is at an even
higher risk due to its large size. It is of great importance to address the issue of identifying these
objects and have the ability to predict where these objects will be at any given time and if they
pose a risk to other space objects. The motivation for this paper is the belief that it is necessary
to develop means to detect, track, identify, and predict the future intentions, actions, and positions
of space objects with adequate precision and accuracy. In addition to this, means to determine the
origin of these objects along with any change in their orbital state must be generated.
∗Graduate Student, Mechanical and Aerospace Engineering Department, University of Texas at Arlington, 500 West First
Street, Woolf Hall 106.†Visiting Student, Mechanical and Aerospace Engineering Department, University of Texas at Arlington‡Associate Professor, Mechanical and Aerospace Engineering, University of Texas at Arlington, 500 West First Street,
Woolf Hall 315G
1

This paper focuses in the area of low observables. More specifically, it deals with an inverse
problem for a system of nonlinear differential equations. Often inverse problems are studied in
linear differential equations. It is the objective of this paper to investigate inverse problem in the
context of nonlinear differential equations more specifically the inverse problem presented in Ref-
erence 1. Similar to the previously mentioned reference the short-term and long-term evolution of
space objects are studied. A system of stochastic nonlinear differential equations provide a detailed
time evolution model. The system of equations include effects from atmospheric drag, solar radia-
tion pressure, and Earth’s gravitation (including J2). Other unmodeled effects are lumped together
and represented as stochastic disturbing forces and torques. The atmospheric drag effects are mod-
eled to account for the projected frontal area of the object, which changes with time as the objects
tumble arbitrarily. The inverse problem to be addressed consists of determining the parameters that
appear in the system of stochastic nonlinear equations so that an accurate description of the position,
velocity, attitude, angular velocity and other properties of the object can be obtained. (Reference 1).
The parameters that appear in the system of differential equations characterize the object which
is assumed to be a cuboid. In other words the parameters are the length, width, and height of the
object. To estimate these parameters, the system of equations include the translational dynamics
and rigid body rotational dynamics with varying mass of moment of inertia terms so that a complete
description of the position and orientation of the object is obtained. The simulated measurements
will emulate information from the Space Surveillance Network (SSN). Lightcurve measurements
are used to determine attitude and orientation, while elevation and azimuth information are used for
position.
This paper also studies the implementation of a batch estimation methodology in conjunction with
the Unscented Kalman filter (UKF). The goal of this implementation is to improve the estimates of
the parameters that appear in the system of differential equations. This is done by estimating the
states by means of the UKF and ‘storing’ these values until a fixed batch size criterion is met. Then
these estimated state values are passed to the batch estimation algorithm which produces a new
updated value for the parameters by reducing a cost function. This is done until all the measurements
are used. Although batch estimation cannot be used in real time it has the advantage of providing
state or parameter estimates that have a lower error-covariance than sequential methods (Reference
2).
PROBLEM FORMULATION
Given time series astrometric and photometric measurements from the Space Surveillance Net-
work (SSN) as explicit and implicit functions of position, attitude, and resident space object’s (RSO)
shape and size, in addition to governing equations for the system dynamics and appropriate mea-
surement models the following problem will be solved.
• Combined Direct + Inverse Problem (References 1, 3–7) This problem aims to determine
the position, velocity, angular velocity, attitude and the Resident Space Object’s shape and
size.
2

The governing equations of motion for combined translation and rotation for the space object are
given by a system of nonlinear ordinary differential equations as shown in Equation (1).
r = v
v = −µ
|r|3r + aJ2 − α(p)|vrel|vrel + a(p)SRP + Γ
g = A(g)ω
I(p)ω = −[ω]I(p)ω + τSRP + τgg (1)
The deterministic acceleration due to Earth’s gravitation is given by − µ|r|3
r. aJ2 is the second
order gravity effect, α(p) represents the atmospheric drag parameter which is dependent upon the
projected area of the RSO, the atmospheric density, and the drag coefficient. The term vrel =v − ωE × r is the relative velocity, where ωE is the angular velocity of the Earth. Moreover
aSRP is the acceleration due to solar radiation pressure, and Γ is the (stochastic) acceleration due
to composite unmodeled forces. The corresponding inverse problem as mentioned above will be to
determine the system parameters (p), based on measurements from the SSN. This work will consider
all disturbances as shown on Equation (1).
For the rotational governing equations of motion g and ω denote the orientation and the angular
velocity vectors of the object, respectively. Here A(g) is a matrix consisting of functions that
depend nonlinearly on the orientation g. I(p) denotes the moment of inertia of the space object and
is a function of the dimensions of the object. The density of the object is assumed constant. τSRP is
the external torque due to solar radiation pressure and τgg is the external torque due to the gravity
gradient. It is assumed that the object does not have any control torques acting on it. Finally [ω] is
the skew-symmetric vector cross product operator of the angular velocity.
Inverse Problem for Orbit State and Parameter Determination
The dynamical system can be represented as a vector x with its entries as positions, velocities,
angular displacements, and angular velocities. The specific inverse problem for the RSO will deal
with the estimation of the object state, attitude, angular velocity, and shape parameters based mea-
surements from optical sensors and radars. The problem is posed as
min∑
j ‖ym(j) − y(j)‖2
subject to ˙x(t) = F (x, p, t)˙p(t) = g(p) (2)
ym(j) is the vector of measurements or the available data and y(j) is the predicted output at
the jth sample instant. An analogous dynamical system will be developed to estimate the system
states, orbit states, and parameters. Similar to Reference 1, the approach of this paper to solve the
inverse problem will be to first obtain the expected value of the orbit as a function of time, second
analyze the time dependence of the covariance of the orbit, and third estimate the system parameters
and corresponding error values. Unlike the work shown in the previously mentioned reference, the
Unscented Kalman Filter will now be coupled with a batch update framework for the object size
parameters.
3

PERTURBATION EFFECTS ON THE RSO DYNAMICS
Translational and rotational acceleration perturbations are considered to model the true dynamics.
The estimator utilizes a process noise term to model these effects.
Drag Acceleration Model
Equation (3) was used to describe the drag experienced by the RSO as it orbits the Earth. The
ballistic coefficient (BC) was set up as a function of the area projected on a plane perpendicular
to the RSO’s velocity vector. As the object tumbles this area will change and so will the ballistic
coefficient. Furthermore an exponential atmospheric model was used (Reference 1 and 8 ).
aEdrag = −1
2ρatm‖vE
rel‖BCvErel (3)
J2 Acceleration Model
For most applications the assumption that Earth is a sphere is sufficient. For a more comprehen-
sive model it is necessary to model the accelerations due to the non-spherical nature of Earth as
well. An aspherical-potential function must be derived in order determine the gravitational attrac-
tion on the SRO. In this case we will use a simplification of the accelerations along each of the axis.
Given the disturbing function R2, where J2 indicates that this approximation is using the second
order zonal harmonics (J2 = 0.0010826269). Furthermore µ is Earth’s gravitational parameter
(3.896 × 105km3/s2), RE is Earth’s mean equatorial radius (RE = 6, 378km), r is the position
vector of the RSO measured from the center of the Earth, and φgc is the latitude of the object.
R2 = −3J2µ
2r
(
RE
r
)(
sin2(φgc)−1
3
)
(4)
Using sin(φgc) = rk/r where rk is the component of r along the z-axis, the following expression
can be obtained.
R2 = −3J2µR
2E
2r3
(
r2Kr2
)
+J2µR
2E
2r3(5)
Now Equation (5) can be differentiated with respect to each of the components of r to obtain the
corresponding accelerations. As an example (Equation (6))
∂R2
∂rI
= −3J2µR
2e rI
2r5
(
−5r2K + 1
r2
)
(6)
Following the same procedure Equations (8) and (9) can be obtained. This yields all three accel-
erations for this model (Reference 8).
aI = −3J2µR
2erI
2r5
(
1−5r2Kr2
)
(7)
aJ = −3J2µR
2erJ
2r5
(
1−5r2Kr2
)
(8)
aK = −3J2µR
2erK
2r5
(
3−5r2Kr2
)
(9)
4

Solar Radiation Pressure Acceleration
Solar radiation pressure is a nonconservative disturbance, much like drag. This model will arrive
at an expression for the specific acceleration due to this disturbance. The force exerted on the object
is a function of the object’s visible area from the Sun. Furthermore, the pressure felt by the object
is the force divided by the incident area exposed to the Sun. The first factor to be considered is the
intensity of the energy of the Sun’s incoming radiation. The following expression gives the solar
flux (W/m2) which varies over a year (Reference 8).
SF =1358
1.004 + 0.0334 cos(Daphelion)(10)
where Daphelion is 2π times the days from when the Earth is at aphelion denoted as a fraction of the
whole year. The change in momentum or the solar pressure per unit area is
pSR =SF
c(11)
where c is the speed of light.
Most surfaces reflect some portion of the incoming radiation and absorb the other portion. Rabs
is used to determine the percentage of absorption, Rdiff is used to denote the percentage of diffused
light and finally Rspecular is the percentage of specular light. For a surface Af which has incident
solar radiation. The normal to the surface makes an angle with the Sun-object line of φinc as shown
on Figure 1. The reflective angle φref is equal to the incident angle. Assuming a Lambertian
diffusion the following expressions can be used to describe the diffuse and specular radiation forces
(Reference 8).
Fa = −pSRRabsA cos(φinc) s (12)
Frs = −2 pSRRspecA cos2(φinc) n (13)
Frd = −pSRRdiffA cos(φinc)
(
2
3n+ s
)
(14)
The total acceleration contribution from all the facets of the object is given by Equation (15). If
φinc for a particular facet does not lie between [π/2,−π/2], then contribution of that facet to the
net acceleration produced is assumed to be zero.
aSRP = −6
∑
i=1
pSRAi cos(φinc)
m
[
2
(
Rdiff
3+Rspec cos(φinc)
)
n+ (1−Rspec) s
]
(15)
Solar Radiation Pressure Torque
The force due to the solar radiation pressure acting on each face of the RSO can be calculated by
taking the vector sum of forces defined in Equations (12), (13), and (14). The net force is assumed
to be acting on the center of the facet and so the torque produced is calculated using rc × F, where
rc is the vector from the center of the space object to the center of the facet. Equation (16) shows
the expression used to calculate the net torque due to solar radiation pressure.
τSRP =
6∑
i=1
rc,i × Fi (16)
τESRP can be obtained by using the direction cosine matrix from from the body fixed frame to the
Earth fixed frame.
5

Gravity Gradient Torque
The RSO will not experience the same gravitational attraction on all points of its body. In order to
account for this phenomena a gravity gradient torque model has been introduced. Portions that are
closer to Earth will feel a stronger attraction compared to the portions of the RSO that are further
away. To calculate the net gravity gradient torque the following equation is used (Reference 9). The
size of the object considered for this study is quite small for this to be significant. Nevertheless these
models are included for modeling the true data and for possible applications wherein these torques
are not negligible.
τgg =
∫
Br × dFg (17)
r is the position vector of the infinitesimal body element with respect to the center of mass of the
SRO. dFg is the gravitational force and can be calculated using Equation (18). Me is the mass of
the Earth, dm is the body element mass, and R is the inertial relative position vector from the center
of the Earth to the RSO’s center of mass.
dFg = −GMe
|R|3Rdm (18)
Substituting Equation (18) into (17) the following expression can be obtained.
τgg = GMe Rc ×
∫
B
r
|R3|dm (19)
This equation can be generalized as shown in Equation (20). This formulation uses the truncation
of the binomial series as an approximation. Where Rc is the inertial position vector relative to the
center of the Earth. [I] is the inertia matrix.
τEgg =
3 G Me Rc
R5c
× [I]Rc (20)
MEASUREMENT MODELS
Astrometric Observation Model
The radar measurements that the observer can obtain are range ρ, azimuth Θ and elevation Φ. The
following expressions will be used to obtain the measurements. The slant range ρ is the fundamental
observation. The subscripts u, e, and n correspond to the Up-East-North components of this vector.
The full model can be found in Reference 2.
Θ = tan−1
(
ρeρn
)
(21)
Φ = sin−1
(
ρu||ρ||
)
(22)
For the problem being addressed only one optical sensor is used and we only consider the azimuth
and elevation measurements.
6

Light Curve Model
The apparent magnitude for each facet can be calculated using the model developed in Refer-
ence 10. The apparent magnitude of the RSO is taken to be the summation of the apparent magni-
tudes of all the facets.
mapp = −mapp,sun − 2.5 log10
∣
∣
∣
∣
∣
6∑
i
Fobs,i
Csun,vis
∣
∣
∣
∣
∣
(23)
Fobs is the amount of light that is impinging on the facet that then reflects to the observer. Csun,vis
is the power per square meter affecting the object caused by visible light striking the facets.
INVERSE PROBLEM SOLUTION USING UNSCENTED KALMAN FILTER WITH BATCH
ESTIMATION
In general batch estimation has the advantage of providing state estimates with a lower error
covariance than a strictly sequential method. Unfortunately batch estimation cannot always be per-
formed when the estimate is needed in real time. The process involves using multiple measurements
to estimate the states/parameters (Reference 2). The dynamics of the system can be expressed in
discrete form as
xk+1 = F(xk,wk,uk, k) (24)
yk = h(xk,uk,vk, k) (25)
with wk as Gaussian white noise process term with zero mean and Qk as the covariance. y is the
measurement vector and vk is the measurement error vector which represents zero-mean Gaussian
noise process with covariance Rk. Where x contains the states as follows
xT =[
rT vT ωB/ET gT pT
]
(26)
where, p = [length width height]T , the dimensions of the RSO.
The estimation of the attitude will require a special derivation of the UKF. Implementing the
quaternions directly would not be desired as the updated quaternions may not have a unit norm. To
avoid this a modified implementation can be used where the norm of the quaternions is forced have
a value of one. The first step is to calculate the error quaternion. This error quaternion is derived
based on the MRP sigma points. Next the attitude perturbation due to each error quaternion can
be calculated by means of quaternion composition. The addition of the perturbation and the error
form the global quaternion. Furthermore, the error quaternion related to each propagated quaternion
sigma point can be obtained by means of the quaternion composition. Finally the MRP error can be
obtained from the propagated error quaternion. This is implemented as shown in Reference 11 and
has not been shown here for the sake of brevity.
Batch Implementation with The UKF
For the batch estimation of the object parameters the maximum likelihood estimation approach is
used. This method minimizes the following cost function by means of the Gauss-Newton algorithm
J(p) =1
2
N∑
k=1
(yk − yk)T (yk − yk) (27)
7

where yk is the estimated value of y at the time tk and N is the total number of measurements in
a particular batch. For an iteration number i the estimate of p at i + 1 is p obtained from the ith
estimate by
pi+1 = pi −[
∇2pJ(p)
]−1 [∇pJ(p)
]
(28)
where the gradients are obtained using the following expressions.
[
∇pJ(p)]
= −N∑
k=1
[
∇pyk
]T(yk − yk) (29)
[
∇2pJ(p)
]
≈
N∑
k=1
[
∇pyk
]T [
∇pyk
]
(30)
As shown in Figure 2 the UKF begins with an initial guess for the states and parameters. The
UKF continues to estimate both states and parameters until the number of measurements equals
a predetermined batch size. Next the estimated values of the states along with the last update of
the parameters only from the UKF is passed to the Batch Estimation loop and the parameters are
iterated until either the cost function meets a specified tolerance or if a fixed number of iterations
is exceeded. The obtained value of the parameters is then passed back to the UKF to continue the
estimation process. For this study, this is done until all measurements are used.
Two approaches were adopted for the update phase in the Batch Estimation loop. The first uses
the Levenberg-Marquardt update as shown in Equation (31). The parameter η is heuristically chosen
(trial and error). η is taken to be large for the initial iteration and is reduced by a specified factor
(f ) on each iteration. Z is a diagonal matrix with entries equal to the diagonal elements of ∇2pJ(p)
and α is a scaling factor (Reference 2).
pi+1 = pi − α[
∇2pJ(p) + ηZ
]−1 [∇pJ(p)
]
(31)
ηk+1 =ηkf
(32)
The second approach also uses a scaling factor α. The Levenberg-Marquardt Method is not used in
this case, rather a modified Gauss-Newton algorithm is implemented.
pi+1 = pi − α[
∇2pJ(p)
]−1 [∇pJ(p)
]
(33)
SIMULATION RESULTS
To better show the results of the batch estimation two experiments were performed. The first of
those experiments is the baseline referred to as Joint Estimation. This experiment uses the UKF
as implemented in Reference (1, 2) including the all measurement models and perturbation effects.
This first experiment does not include the batch estimation loop. Furthermore the Joint Estimation
will be treated as the baseline to compare the performance of the new batch loop. The second
experiment implements batch loop with the UKF and is referred to as Batch Estimation. This second
experiment uses the same measurement and perturbation models as the first experiment. The second
experiment is presented with two cases the first uses a Levenberg-Marquardt algorithm to estimate
the parameters. The second case uses a Gauss-Newton algorithm for the same purpose.
8

The set of synthetic measurements for both experiments was created with the same initial con-
ditions and object parameters. The object size for both experiment was as p = [2 3 4]T m for
length, width, and height respectively. For a Low Earth Orbit (LEO) at an inclination of 15◦ and
period of approximately 90 minutes the following initial conditions were used:
• Position and velocity initial conditions:
r(0) = [6738 0 0]T km
v(0) = [0 7.4292 1.9906]T km/s
• Angular velocity and MRP initial conditions:
ωB/E(0) =[
1.357 × 10−4 4.296 × 10−3 − 1.104 × 10−3]T
rad/s
g(0) =[
0 0 4.14213 × 10−1]T
The synthetic measurements were created using zero-mean white noise error processes with stan-
dard deviation of 2 arc-seconds for azimuth and elevation. For the light curve the error process
has a standard deviation of 0.1 magnitude. The measurements were sampled every 30 seconds. The
lightcurve model was set up using Phong specularity parameters nu and nv with a value of 10 for all
facets. The values of specular and diffusive reflection were chosen as Rspec = 0.7 and Rdiff = 0.2for three facets and Rspec = 0.6 and Rdiff = 0.2 for the remaining three. These values yield a
visible magnitude that allows the estimation of the attitude and object parameters.
Baseline - Joint Estimation (JE)
The results presented in the Appendix have been produced using the synthetic measurements as
previously described. The estimator initial conditions errors were set as: 10 Km for position error,
0.1 Km/s for velocity error, 1400 deg/hr for rotational rate error, 20 deg for attitude error, and
0.05 m for the dimension error. Furthermore, the initial conditions for the error covariance are
102 Km2 for position, 0.12 (Km/s)2 for velocity, 14002 (deg/hr)2 for rotational rate error, 202 deg2
for attitude, and 0.052 m2 for dimensions.
Figure 3 shows the projected area time history as the object travels through its orbit. As it can
be seen the area changes over time as the object tumbles. Figures 4 through 8 show the results
obtained for the Joint Estimation by averaging over 100 runs. Figure 4 shows the estimation of the
length, width, and height of the RSO. As it can be seen the filter estimates these parameters within
centimeters of the actual size of the object. These parameters are very weakly observable and in
some cases arent observable at all. Future work will investigate this in more detail. The ±3σ bounds
are shown as dotted lines in this figure and all state and parameter error figures. Moreover, Figure
5 and 6 show the estimation of the position and velocity respectively as the space object translates
through its orbit. Values for position and velocity have been estimated by the filter fairly quickly
and accurately. Figures 7 and 8 show the attitude and angular velocity estimation respectively. The
attitude has been estimated approximately with in 3 degrees of the true value. The initial condition
for the attitude estimator was about 20 degrees from the true values. The angular velocity has been
estimated with in less than a tenth of a degree per second. The corresponding initial condition
was 1400 deg/hr away from the true values. The 3σ bounds for the attitude estimation increase
and decrease as the object tumbles and the information provided by the lightcurve changes. The 3σbounds for the angular velocity remain constant through the estimation. Clearly there are times when
the 3σ bounds on the attitude errors change with the available information in the measurements.
9

Batch Estimation (BE)
Two methods were used for the Batch Estimation process. The first uses the Levenberg-Marquardt
method while the second uses the Gauss-Newton method to arrive at the estimation of the object’s
dimensions. The results presented on both of the following sections have been obtained by aver-
aging the results from 10 runs. The chosen batch size of measurements has been selected as 60
measurements per batch. A total of 181 measurements were used to obtain a total of three batches.
The batch size was chosen by investigating the observability of the states and parameters given a
batch of measurements. The observability of the ‘stacked’ batch observability matrix yields a rank
of 15. As shown on Table 1 the observability matrix has full rank (= 15) for batches greater than
10. For batches of less than 10 measurements the rank of the ‘stacked’ observability matrix was
found to be less than 15. That said, depending upon the initial conditions, the full rank condition
was always met when the batch size was 60 or more. Therefore, it was determined that a batch of
60 measurements would yield adequate results. The number of iterations per batch was set as 20
for both cases. The estimator initial conditions errors and initial conditions for the error covariance
were set to be the same as the Joint Estimation case. Similarly, the synthetic measurements were
created with the same initial conditions.
Table 1. Bach Size and Observability Matrix Rank Correlation
Batch Size Less than 10 Greater than 10
Rank of Observability Matrix Less than 15 15
Levenberg-Marquardt Method (BE-LM). The results for the Levenberg-Marquardt Bach Esti-
mation have been presented in the Appendix. These results were obtained with values of η = 100and f = 5. A scaling factor was introduced in this case as the cost function was modifying the
values for the parameters to a point where they became negative. In order to correct this α was set
as 0.1 as seen in Equation (31). This allowed the cost function to be decreased while maintaining a
non-negative value for the parameters. Figures 9 though 14 show the results obtained by averaging
the values from 10 independent runs. The first of these figures shows the estimation of the dimen-
sions of the object. No 3σ have been shown for any of the parameter estimations as these were done
by the batch estimation rather than the UKF. It can be seen the values change as the batch estimation
loop progresses. The values were estimated with in centimeters of the true value. In addition, Figure
10 shows the value of the cost function for each batch. It can be seen that the Levenberg-Marquardt
method is effective in reducing the value of the cost function with each iteration. Figure 11 shows
the estimation of the position. The 3σ bounds for this estimation are larger than those of the JE but
they quickly reduce. The final estimation value for the velocity is within 0.1 Km/s of the true value.
Figure 13 contains the results for the attitude estimation of the RSO. The 3σ bounds for the attitude
estimation vary more in this case than for the JE case, nevertheless the estimation of the attitude is
within 3 degrees of the true value. Finally the angular velocity estimation is shown in Figure 19.
The 3σ bounds for this plot increase and later oscillate as the estimation progresses.
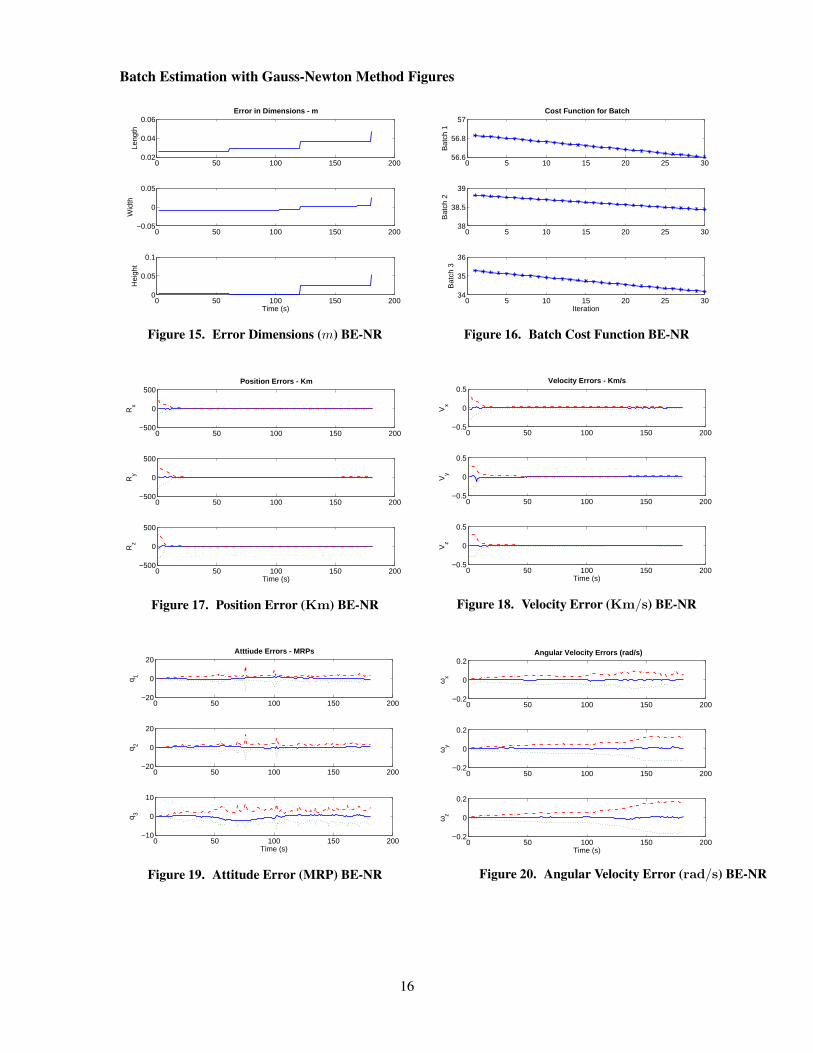
Gauss-Newton Method (BE-NR). This method was implemented with a scaling factor α = 0.001.
The results for this method are shown in Figures 15 through 20. Figure 15 clearly shows the evo-
lution of the values for the length, width, and height through each of the three batches. The batch
yields estimates within centimeters of the true value of the dimensions of the object. The cost
function for one of the runs has been shown in Figure 16. It can be seen that for each batch of
10

measurements the cost function decreases with each iteration. Moreover, Figures 17 and 18 show
the estimation of the position and velocity. The 3σ bounds for the position begin at larger values
than those for the JE, nevertheless the error for the batch estimation quickly reaches an error close
to zero. The velocity estimation is similar to that of the JE with 3σ bounds closing in slightly faster.
Figure 19 shows the attitude estimation for this case. When compared to the results obtained by the
JE it can be seen that the error is slightly larger and the 3σ vary more as well. Nevertheless, the
attitude is estimated within four degrees of the true value. Finally the angular velocity estimation
error can be seen in Figure 20. Similarly to the attitude estimation, the error in the angular velocity
is slightly higher in this case when compared to that of the JE. The 3σ bounds also increase towards
the end of the estimation.
SUMMARY AND CONCLUSIONS
The focus of this paper was to further advance the work done in Reference 1. The motivation
behind this work is to continue improving methods that can be used to identify space objects that
could pose a danger to critical space assets. A new implementation of the UKF with a batch esti-
mation loop was proposed and implemented. The UKF estimates the states and parameters for a
predetermined batch size. When the batch size is reached the estimates are passed to the batch loop.
The batch loop was implemented using two methodologies. The first of those methodologies is the
Levenberg-Marquardt. The second methodology uses a Gauss-Newton algorithm. Once the batch
estimation iterates, a new estimate of the object’s parameters is obtained. This process is followed
until all available measurements are used.
It was determined that an adequate batch size was 60 measurements. A total of 181 measure-
ments were used for a total of three batches. Two experiments were executed. The first of those
experiments was deemed Joint Estimation and was treated as the baseline. This experiment did
not use the batch loop, rather it implemented all the measurement and perturbation models to ob-
tain a benchmark behavior of the UKF. The results obtained showed the UKF converges extremely
well for the position and velocity. The attitude and angular velocity estimations are good but the
3σ bound behavior could be improved. The estimation of the parameters also behaves well. The
second experiment was the implementation of the batch loop and the UKF. The second experiment
namely the Batch Estimation had two cases. The first case dealt with the implementation of the the
Levenberg-Marquardt method. The results for this case showed an improvement on the estimation
of the RSO’s parameters. It was shown that the value for the cost function decreases for each batch.
Moreover, the estimation of the position and velocity was similar to that of the Joint Estimation. The
attitude and angular velocity estimation was slightly different than that of the baseline, specially in
the behavior of the 3σ bounds. Finally the second case for the batch estimation used the Gauss-
Newton algorithm. The estimation of the parameters was improved when compared to that of the
baseline and the first case. Nevertheless, the minimization of the cost function is not as pronounced
as in the first case. The estimation of the velocity and the position are very similar to that of the first
batch case. Similarly, the attitude and angular velocity 3σ behavior could be improved.
Although batch estimation techniques can not be used in real-time, we developed this coupled
approach to exploit their advantage in obtaining estimates with lower error-covariance than with
sequential methods. It was seen that both the Levenberg-Marquardt methodology and the Gauss-
Newton yielded a better parameter estimate than the baseline UKF. This is not conclusively proven
and more work is to be conducted to show this. It was also seen that the Gauss-Newton algorithm
yielded a slightly better results than the Levenberg-Marquardt method. This too needs to be proven
11

with additional studies. Although further work needs to be done in the estimation of the attitude
and angular velocity this is an important step towards the estimation of RSO parameters. This work
has advanced the current knowledge in the area of low observables and the investigation of inverse
problems in nonlinear stochastic differential equations. Future work will involve improving upon
the current methods presented here.
The lightcurve measurement model has not been verified/calibrated against any real data. It was
found that the model utilized by us together with the initial conditions (orbit characteristics) yielded
very little information for accurate attitude estimation. Future work will involve improving this
measurment model with appropriate calibration to improve the estimation accuracy.
REFERENCES
[1] K. Subbarao and L. Henderson, “Inverse Problems in Unresolved Space Object Identification,” SpaceFlight Mechanics Meering, No. 10-149, 2010.
[2] J. L. Crassidis and J. L. Junkins, Optimal Estimation of Dynamic Systems. New York, New York:Chapman and Hall \CRC, 2004.
[3] D. A. Vallado and S. S. Carter, “Accurate orbit determination from short-arc dense observational data,”Advances in Astronautical Sciences, Vol. 97, 1997, pp. 1587–1602.
[4] J. Matusewicz, K. Subbarao, and J. Frisbee, “Uncertainty characterization of orbital debris using sim-ulated space surveillance network measurements,” AAS/AIAA Astrodynamics Specialist Conference,Mackinac Island, Michigan, August 19-23 2007.
[5] J. Matusewicz, K. Subbarao, and J. Frisbee, “Uncertainty characterization of orbital debris using theextended Kalman filter,” AAS/AIAA Astrodynamics Specialist Conference, Mackinac Island, Michigan,August 19-23 2007.
[6] M. Kaasalainen, L. Lamberg, K. Lumme, and E. Bowell, “Interpretation of lightcurves of atmosphere-less bodies: I. General theory and new inversion schemes,” Astronomy and Astrophysics, Vol. 259, 1992,pp. 318–332.
[7] J. Durech, “Shape determination of the asteroid (6053) 1993 BW3,” Icarus, Vol. 159, 2002, pp. 192–196.
[8] D. A. Vallado, Fundamentals of Astrodynamics and Applications. El Segundo, California and Boston,Massachusetts: Microcosm Press and Kluwer Academic Publishers, 2001.
[9] H. Schaub and J. Junkins, Analytical Mechanics of Aerospace Systems. AIAA, 2009.
[10] R. Linares, J. L. Crassidis, M. K. Jah, and H. Kim, “Astrometric and Photometric Data Fusion for Resi-dent Space Object Orbit, Attitude, and Shape Determination Via Multiple-Model Adaptive Estimation,”AAS/AIAA Astrodynamics Specialists Conference, Vol. AIAA-8341, 2010.
[11] M. F. Crassidis, J. L., “Unscented Filtering for Spacecraft Attitude Estimation,” Journal of Guidance,Control and Dynamics, Vol. 26, No. 4, 2003, pp. 536–542.
12

APPENDIX: FIGURES
Figure 1. Incident solar radiation on a particular face of the space object with ab-
sorbed (Fa) and reflective (Fr) forces (Reference 8)
Figure 2. Batch Estimation Sequence for Unscented Kalman Filter
13

Joint Estimation Figures
0 10 20 30 40 50 60 70 80 90 1002.3
2.35
2.4
2.45
2.5
2.55
2.6
2.65
2.7
2.75
2.8x 10
−5 Projected Frontal Area
Time (s)
Are
a (m
2 )
Figure 3. Projected Area (m2) JE
0 20 40 60 80 100−0.2
0
0.2
Leng
th
Error in Dimensions - m
0 20 40 60 80 100−0.2
0
0.2
Wid
th
0 20 40 60 80 100−0.2
0
0.2
Time (s)
Hei
ght
Figure 4. Error Dimensions (m) JE
0 20 40 60 80 100−5
0
5 Position Errors - Km
Rx
0 20 40 60 80 100−5
0
5
Ry
0 20 40 60 80 100−5
0
5
Time (s)
Rz
Figure 5. Position Error (Km) JE
0 20 40 60 80 100−5
0
5x 10
−3 Velocity Errors - Km/s
Vx
0 20 40 60 80 100−5
0
5x 10
−3
Vy
0 20 40 60 80 100−5
0
5x 10
−3
Time (s)
Vz
Figure 6. Velocity Error (Km/s) JE
0 20 40 60 80 100−5
0
5 Atttiude Errors - (deg)
φ
0 20 40 60 80 100−5
0
5
Time
θ
0 20 40 60 80 100−5
0
5
Time (s)
ψ
Figure 7. Attitude Error (MRP) JE
0 20 40 60 80 100−5
0
5x 10
−4 Angular Velocity Errors (rad/s)
ωx
0 20 40 60 80 100−5
0
5x 10
−4
ωy
0 20 40 60 80 100−5
0
5x 10
−4
Time (s)
ωz
Figure 8. Angular Velocity Error (rad/s) JE
14

Batch Estimation with Levenberg-Marquardt Method Figures
0 50 100 150 200−0.5
0
0.5
Leng
th
Error in Dimensions - m
0 50 100 150 200−0.5
0
0.5
Wid
th
0 50 100 150 2000
1
2
Time (s)
Hei
ght
Figure 9. Error Dimensions (m) BE-LM
0 5 10 15 20 25 300
50
100
Bat
ch 1
Cost Function for Batch
0 5 10 15 20 25 300
50
Bat
ch 2
0 5 10 15 20 25 3025
30
35
Iteration
Bat
ch 3
Figure 10. Batch Cost Function BE-LM
0 50 100 150 200−500
0
500 Position Errors - Km
Rx
0 50 100 150 200−500
0
500
Ry
0 50 100 150 200−500
0
500
Time (s)
Rz
Figure 11. Position Error (Km) BE-LM
0 50 100 150 200−0.5
0
0.5 Velocity Errors - Km/s
Vx
0 50 100 150 200−0.5
0
0.5
Vy
0 50 100 150 200−0.5
0
0.5
Time (s)
Vz
Figure 12. Velocity Error (Km/s) BE-LM
0 50 100 150 200−20
0
20 Atttiude Errors - MRPs
q 1
0 50 100 150 200−20
0
20
q 2
0 50 100 150 200−20
0
20
Time (s)
q 3
Figure 13. Attitude Error (MRP) BE-LM
0 50 100 150 200−0.1
0
0.1 Angular Velocity Errors (rad/s)
ωx
0 50 100 150 200−0.2
0
0.2
ωy
0 50 100 150 200−0.1
0
0.1
Time (s)
ωz
Figure 14. Angular Velocity Error (rad/s) BE-LM
15
Batch Estimation with Gauss-Newton Method Figures
0 50 100 150 2000.02
0.04
0.06
Leng
th
Error in Dimensions - m
0 50 100 150 200−0.05
0
0.05
Wid
th
0 50 100 150 2000
0.05
0.1
Time (s)
Hei
ght
Figure 15. Error Dimensions (m) BE-NR
0 5 10 15 20 25 3056.6
56.8
57
Bat
ch 1
Cost Function for Batch
0 5 10 15 20 25 3038
38.5
39
Bat
ch 2
0 5 10 15 20 25 3034
35
36
Iteration
Bat
ch 3
Figure 16. Batch Cost Function BE-NR
0 50 100 150 200−500
0
500 Position Errors - Km
Rx
0 50 100 150 200−500
0
500
Ry
0 50 100 150 200−500
0
500
Time (s)
Rz
Figure 17. Position Error (Km) BE-NR
0 50 100 150 200−0.5
0
0.5 Velocity Errors - Km/s
Vx
0 50 100 150 200−0.5
0
0.5
Vy
0 50 100 150 200−0.5
0
0.5
Time (s)
Vz
Figure 18. Velocity Error (Km/s) BE-NR
0 50 100 150 200−20
0
20 Atttiude Errors - MRPs
q 1
0 50 100 150 200−20
0
20
q 2
0 50 100 150 200−10
0
10
Time (s)
q 3
Figure 19. Attitude Error (MRP) BE-NR
0 50 100 150 200−0.2
0
0.2 Angular Velocity Errors (rad/s)
ωx
0 50 100 150 200−0.2
0
0.2
ωy
0 50 100 150 200−0.2
0
0.2
Time (s)
ωz
Figure 20. Angular Velocity Error (rad/s) BE-NR
16











![Puschkin und Tiflis: Kaukasische Spuren (preprint) [Pushkin and Tbilisi: Caucasian Traces (preprint)]](https://static.fdokumen.com/doc/165x107/6315cc26511772fe45108470/puschkin-und-tiflis-kaukasische-spuren-preprint-pushkin-and-tbilisi-caucasian.jpg)








