The Effectiveness of Covert vs. Overt Brand Visibility in Video ...
Upload
independentCategory
view
2download
0
44 IEEE JOURNAL ON SELECTED AREAS IN COMMUNICATIONS, ANAND
Power Control Game in Multi-Terminal CovertTiming Channels
S. Anand, S. Sengupta, K. Hong and R. Chandramouli
Abstract—We present a game theoretic power control ofoverlay/overt communications to maximize the goodput (effectivethroughput of error-free bits) of multi-terminal covert timingchannels. Most approaches in the literature on covert timingchannels discuss capacities of the timing channels but do notstudy how the overlay communication can be controlled tomaximize the goodput of covert timing channels. We study thefactors of the overlay communication that affect the goodput ofeach timing channel in a multi-terminal covert timing network.We show that the goodput of the covert timing channel canbe enhanced by increasing the rate of overlay transmission andby game theoretic power control of overlay communication. Wefinally extend the game theoretic power control to maximize thegoodput of each covert timing channel in a multi-terminal coverttiming network by maximizing the asymptotic spectral efficiencyof the overlay communication.
Index Terms—Covert timing channels, multi-terminal, good-put, power control.
I. INTRODUCTION
WE PRESENT a game theoretic power control of over-lay/overt communication to maximize the goodput (ef-
fective throughput of error-free bits) of multi-terminal covert-timing channels. Covert communication [1] initially startedoff as parasitic communication and later developed into aneffective means of hiding communication as an underlaybeneath another application. Covert channels can be appliedto increase the capacity of channels beyond the service rates,e.g., as shown in [2] or to hide data from attackers, e.g., asdiscussed in [3]. One popular means of hiding communicationis the use of covert timing channels [4], wherein, a transmitternot only transmits overlay packets to the receiver as a “nor-mal communication”, but also transmits an underlay covertinformation by delaying the overlay packets by an amount t0corresponding to a zero bit and by an amount t1 correspondingto a one bit. Alternatively, the transmitter and receiver canagree on a threshold, T and packets can be delayed by arandom time larger than T to convey a zero and a randomtime less than T to convey a one.The notion of covert timing channels has been popular as a
means to enhance capacity [2]-[9] (and the references there in).Anantharam and Verdu [2] use the arrival times in queues to
Manuscript received 15 January 2011; revised 15 July 2011. This researchwas partially funded by NSF CCF # 0916180, NSF CNS #0917008 and byPSC-CUNY Award # 64738-0042.S. Anand, K. Hong and R. Chandramouli are with the Depart-
ment of ECE, Stevens Institute of Technology (e-mail: {asanthan,khong,mouli}@stevens.edu).S. Sengupta is with the Department of Mathematics and Computer Science,
John Jay College of Criminal Justice, City University of New York (e-mail:[email protected]).Digital Object Identifier 10.1109/JSAC.2012.120105.
convey covert information and thereby increase the capacity ofqueues beyond the rate of service. This is further extended in[5] to include results for non-exponential service distributionsand in [6] to determine bounds on the sum-timing capacityof queues with multiple flows, each with exponential servicedistribution. In [7], Wagner and Anantharam consider theexponential service timing channel (ESTC) and compute thezero reliability rate and propose a distance metric to achievebounds on the probability of error. Wang and Lee [8] extendthe capacity estimation in [4] including the overheads incurredto overcome the effects due to loss of synchronization. In[9], Berk et al. present statistical detection of covert timingchannels by modeling it as a binary asymmetric channel.Most studies in the literature discuss means to enhance the
covert timing channel capacity. The capacity provides the max-imum rate at which data can be transmitted to achieve as lowbit error rates as desired. However, a parameter of interest tothe transmit-receive pairs in covert timing networks is also theactual goodput, i.e., the effective rate of transmission of error-free bits. The analysis of goodput provides a more practicalperspective of the kind of underlay communication that canbe covertly transmitted. The goodput is typically a decreasingfunction of the bit error rate (BER) at the receiver. The BERoccurs due to the wireless channel characteristics (e.g., multi-path fading)1. The BER, in turn, is a decreasing function ofthe difference between the time delay corresponding to a zero,
t0 and that corresponding to a one, t1, i.e., Δt�= |t1 − t0|.
Larger Δt results in a lower BER, i.e., a larger goodput.The optimal value of |t1 − t0| is also expected to depend onthe characteristics of the overlay communication. Hence, it isimportant to study how different parameters of the overlaycommunication affect the covert timing channel goodput.Eavesdroppers in covert timing networks can potentially
detect covert communication by measuring anomalies in thepacket delays [11]2. Therefore, a larger value of |t1 − t0| en-ables a passive attacker or an eavesdropper to easily detect thecovert communication as the anomalies in the packet delaysare more obvious. One potential means to mitigate detection ofcovert communications is by using auxiliary communications[13], [14]. Here, other transmitters and receivers of covertcommunication transmit packets so that a malicious attackercannot detect the covert communications. To illustrate this, we
1Note that in communication systems, error control codes [10] can beused to reduce the BER. However, covert timing operations are low ratecommunications [2] and error control codes further degrade the throughputdue to the overheads. Therefore, error control codes are not considered in thediscussion of the BER in covert timing channels.2Detection can also be made by using the entropy of the overlay message
(e.g., [12]) but is very complex.
0733-8716/12/$25.00 c© 2012 IEEE
ANAND et al.: POWER CONTROL GAME IN MULTI-TERMINAL COVERT TIMING CHANNELS 45
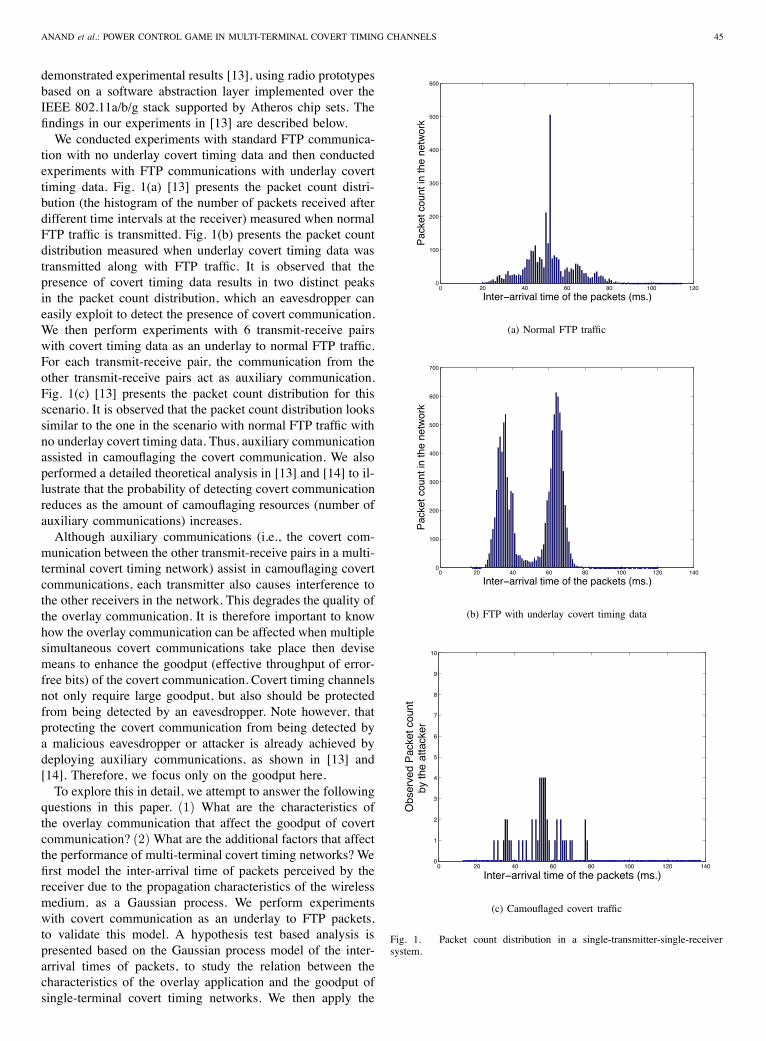
demonstrated experimental results [13], using radio prototypesbased on a software abstraction layer implemented over theIEEE 802.11a/b/g stack supported by Atheros chip sets. Thefindings in our experiments in [13] are described below.We conducted experiments with standard FTP communica-
tion with no underlay covert timing data and then conductedexperiments with FTP communications with underlay coverttiming data. Fig. 1(a) [13] presents the packet count distri-bution (the histogram of the number of packets received afterdifferent time intervals at the receiver) measured when normalFTP traffic is transmitted. Fig. 1(b) presents the packet countdistribution measured when underlay covert timing data wastransmitted along with FTP traffic. It is observed that thepresence of covert timing data results in two distinct peaksin the packet count distribution, which an eavesdropper caneasily exploit to detect the presence of covert communication.We then perform experiments with 6 transmit-receive pairswith covert timing data as an underlay to normal FTP traffic.For each transmit-receive pair, the communication from theother transmit-receive pairs act as auxiliary communication.Fig. 1(c) [13] presents the packet count distribution for thisscenario. It is observed that the packet count distribution lookssimilar to the one in the scenario with normal FTP traffic withno underlay covert timing data. Thus, auxiliary communicationassisted in camouflaging the covert communication. We alsoperformed a detailed theoretical analysis in [13] and [14] to il-lustrate that the probability of detecting covert communicationreduces as the amount of camouflaging resources (number ofauxiliary communications) increases.Although auxiliary communications (i.e., the covert com-
munication between the other transmit-receive pairs in a multi-terminal covert timing network) assist in camouflaging covertcommunications, each transmitter also causes interference tothe other receivers in the network. This degrades the quality ofthe overlay communication. It is therefore important to knowhow the overlay communication can be affected when multiplesimultaneous covert communications take place then devisemeans to enhance the goodput (effective throughput of error-free bits) of the covert communication. Covert timing channelsnot only require large goodput, but also should be protectedfrom being detected by an eavesdropper. Note however, thatprotecting the covert communication from being detected bya malicious eavesdropper or attacker is already achieved bydeploying auxiliary communications, as shown in [13] and[14]. Therefore, we focus only on the goodput here.To explore this in detail, we attempt to answer the following
questions in this paper. (1) What are the characteristics ofthe overlay communication that affect the goodput of covertcommunication? (2)What are the additional factors that affectthe performance of multi-terminal covert timing networks? Wefirst model the inter-arrival time of packets perceived by thereceiver due to the propagation characteristics of the wirelessmedium, as a Gaussian process. We perform experimentswith covert communication as an underlay to FTP packets,to validate this model. A hypothesis test based analysis ispresented based on the Gaussian process model of the inter-arrival times of packets, to study the relation between thecharacteristics of the overlay application and the goodput ofsingle-terminal covert timing networks. We then apply the
0 20 40 60 80 100 1200
100
200
300
400
500
600
Pac
ket c
ount
in th
e ne
twor
k
Inter−arrival time of the packets (ms.)
(a) Normal FTP traffic
0 20 40 60 80 100 120 1400
100
200
300
400
500
600
700
Pac
ket c
ount
in th
e ne
twor
k
Inter−arrival time of the packets (ms.)
(b) FTP with underlay covert timing data
0 20 40 60 80 100 120 1400
1
2
3
4
5
6
7
8
9
10
Obs
erve
d P
acke
t cou
nt
by th
e at
tack
er
Inter−arrival time of the packets (ms.)
(c) Camouflaged covert traffic
Fig. 1. Packet count distribution in a single-transmitter-single-receiversystem.
46 IEEE JOURNAL ON SELECTED AREAS IN COMMUNICATIONS, ANAND
results obtained for the single-terminal networks to multi-terminal networks. Multi-terminal covert timing networks suf-fer from multiple access interference (MAI) in addition toerrors due to wireless propagation characteristics. This affectsthe performance of the overlay communication, which, inturn, affects the performance of the covert communication. Wepresent a game theoretic power control to counter the MAI andstudy the goodput of multi-terminal covert timing networkswith game theoretic power control. We finally extend the gametheoretic power control to perform an asymptotic analysis ofthe spectral efficiency of the overlay communications in multi-terminal covert timing networks which is used to provide a ratecontrol to maximize the covert timing channel goodput. Ourresults indicate that covert timing operations are more effectivewhen performed as underlay to applications with high-rateand/or smaller packet sizes.The rest of the paper is organized as follows. In Section
II, we describe the experiments performed on a covert timingtest bed, which we then use to model the inter-arrival timesof packets at the receiver. Section III describes the systemmodel. In Section IV, we present the analysis to maximizethe goodput of a single-terminal and multi-terminal coverttiming network and some numerical results. The asymptoticspectral efficiency of overlay applications in multi-terminalcovert timing networks are also presented. Conclusions aredrawn in Section V.
II. MODELING INTER-ARRIVAL TIMES
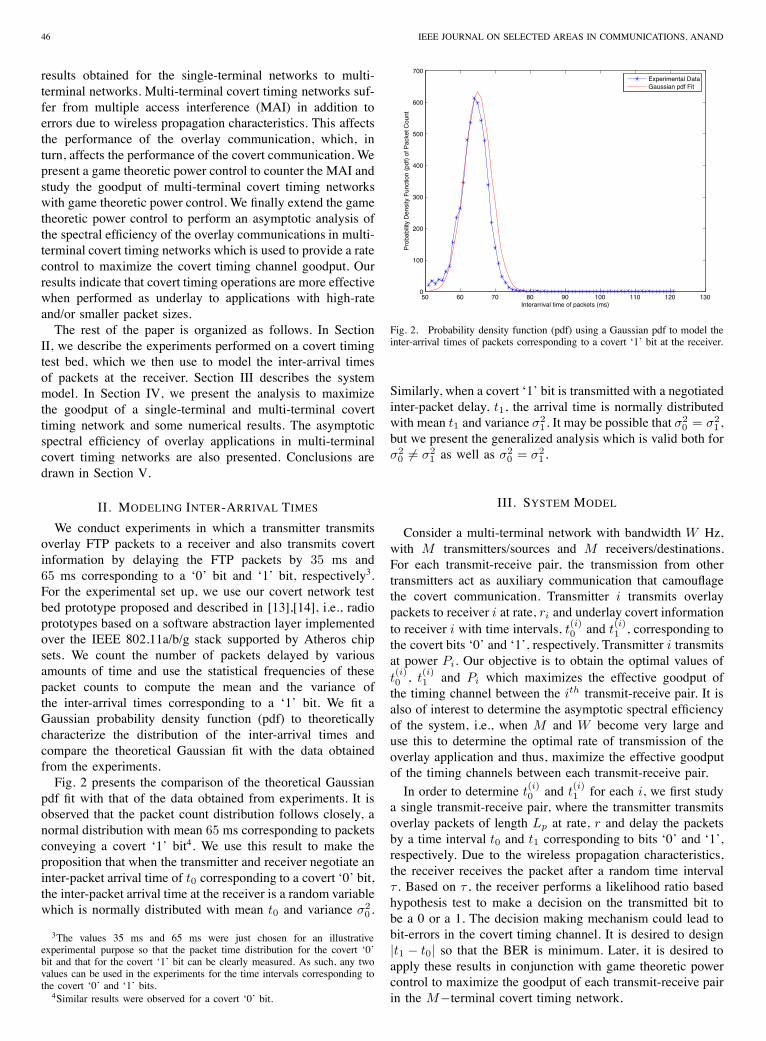
We conduct experiments in which a transmitter transmitsoverlay FTP packets to a receiver and also transmits covertinformation by delaying the FTP packets by 35 ms and65 ms corresponding to a ‘0’ bit and ‘1’ bit, respectively3.For the experimental set up, we use our covert network testbed prototype proposed and described in [13],[14], i.e., radioprototypes based on a software abstraction layer implementedover the IEEE 802.11a/b/g stack supported by Atheros chipsets. We count the number of packets delayed by variousamounts of time and use the statistical frequencies of thesepacket counts to compute the mean and the variance ofthe inter-arrival times corresponding to a ‘1’ bit. We fit aGaussian probability density function (pdf) to theoreticallycharacterize the distribution of the inter-arrival times andcompare the theoretical Gaussian fit with the data obtainedfrom the experiments.Fig. 2 presents the comparison of the theoretical Gaussian
pdf fit with that of the data obtained from experiments. It isobserved that the packet count distribution follows closely, anormal distribution with mean 65 ms corresponding to packetsconveying a covert ‘1’ bit4. We use this result to make theproposition that when the transmitter and receiver negotiate aninter-packet arrival time of t0 corresponding to a covert ‘0’ bit,the inter-packet arrival time at the receiver is a random variablewhich is normally distributed with mean t0 and variance σ2
0 .
3The values 35 ms and 65 ms were just chosen for an illustrativeexperimental purpose so that the packet time distribution for the covert ‘0’bit and that for the covert ‘1’ bit can be clearly measured. As such, any twovalues can be used in the experiments for the time intervals corresponding tothe covert ‘0’ and ‘1’ bits.4Similar results were observed for a covert ‘0’ bit.
50 60 70 80 90 100 110 120 1300
100
200
300
400
500
600
700
Interarrival time of packets (ms)
Pro
babi
lity
Den
sity
Fun
ctio
n (p
df)
of P
acke
t Cou
nt
Experimental DataGaussian pdf Fit
Fig. 2. Probability density function (pdf) using a Gaussian pdf to model theinter-arrival times of packets corresponding to a covert ‘1’ bit at the receiver.
Similarly, when a covert ‘1’ bit is transmitted with a negotiatedinter-packet delay, t1, the arrival time is normally distributedwith mean t1 and variance σ2
1 . It may be possible that σ20 = σ2
1 ,but we present the generalized analysis which is valid both forσ2
0 �= σ21 as well as σ2
0 = σ21 .
III. SYSTEM MODEL
Consider a multi-terminal network with bandwidth W Hz,with M transmitters/sources and M receivers/destinations.For each transmit-receive pair, the transmission from othertransmitters act as auxiliary communication that camouflagethe covert communication. Transmitter i transmits overlaypackets to receiver i at rate, ri and underlay covert informationto receiver i with time intervals, t(i)0 and t
(i)1 , corresponding to
the covert bits ‘0’ and ‘1’, respectively. Transmitter i transmitsat power Pi. Our objective is to obtain the optimal values oft(i)0 , t
(i)1 and Pi which maximizes the effective goodput of
the timing channel between the ith transmit-receive pair. It isalso of interest to determine the asymptotic spectral efficiencyof the system, i.e., when M and W become very large anduse this to determine the optimal rate of transmission of theoverlay application and thus, maximize the effective goodputof the timing channels between each transmit-receive pair.
In order to determine t(i)0 and t
(i)1 for each i, we first study
a single transmit-receive pair, where the transmitter transmitsoverlay packets of length Lp at rate, r and delay the packetsby a time interval t0 and t1 corresponding to bits ‘0’ and ‘1’,respectively. Due to the wireless propagation characteristics,the receiver receives the packet after a random time intervalτ . Based on τ , the receiver performs a likelihood ratio basedhypothesis test to make a decision on the transmitted bit tobe a 0 or a 1. The decision making mechanism could lead tobit-errors in the covert timing channel. It is desired to design|t1 − t0| so that the BER is minimum. Later, it is desired toapply these results in conjunction with game theoretic powercontrol to maximize the goodput of each transmit-receive pairin the M−terminal covert timing network.

ANAND et al.: POWER CONTROL GAME IN MULTI-TERMINAL COVERT TIMING CHANNELS 47
IV. PERFORMANCE ANALYSIS
A. Single-Terminal Analysis
The transmitter transmits packets of length Lp correspond-ing to an overlay application at a rate, r. Hence, the packettime, tp, is given by tp = Lp/r. To transmit a covert ‘0’ bit,the transmitter is required to transmit a packet for a time tp,wait for a time, t0 and then transmit another packet. Similarly,to transmit a covert ‘1’ bit, the transmitter is required totransmit a packet for a time tp, wait for a time, t1 and thentransmit another packet. Therefore, the transmitter requires onan average, a time Ntp + b0t0 + b1t1 to transmit N −1 covertbits with b0 covert ‘0’ bits and b1 covert ‘1’ bits. The averagerate of transmission for the covert communication, rcov, canthen be written as
rcov =N − 1
Ntp + E [b1] t1 + E [b0] t0. (1)
Let π0 be the probability that a covert ‘0’ bit is transmittedand π1 = 1 − π0 be the probability of transmitting a covert‘1’ bit. Then E [b0] = (N − 1)π0 E [b1] = (N − 1)π1 andhence, for large, N , rcov can be written as
rcov =1
tp + π0t0 + π1t1, (2)
and for π0 = π1 = 0.5,
rcov =2
2tp + t0 + t1, (3)
The receiver can wrongly decode the covert bits (due to thewireless channel characteristics) and suffer a BER, pe. Hence,the effective goodput of the timing channel, re, is the actualtransmission rate rcov weighted by the loss due to BER, canbe approximated as
re = rcov(1 − 2pe). (4)
In the above, the factor of 2 occurs due to the following reason.If the channel errors are very large causing BER of more than0.5 (which can be estimated from large values of σ1 and σ0),then receivers can simply invert the bits in the decoded covertmessage. Thus, the performance of a channel with BER, pe,is same as that of the channel with BER, 1 − pe. The worstperformance occurs when pe = 0.5 because inverting the bitsserve no purpose for the receiver and the receiver can as wellmake a decision independent of the transmitted bits. Thus,the effective rate of covert transmission is zero because thereceiver does receive covert bits, but the decision on these bitsare independent of what was transmitted by the transmitter.Thus, when pe = 0, re = rcov and when pe = 0.5, re = 05.The BER, pe, is evaluated as follows. Let p(τ |0) be the
probability density function (pdf) of τ when a 0 is transmittedand let p(τ |1) be the pdf of τ when a 1 is transmitted. Basedon the discussion in Section II, τ ∼N (
t0, σ20
)when a covert
‘0’ bit is transmitted and τ ∼N (t1, σ
21
)when a covert ‘1’ bit
5We also numerically evaluate the effective timing channel goodput, whenthe factor of 2 is not included. The difference between timing channelgoodputs in the two cases is negligible as will be observed from Fig. 4.
is transmitted. Therefore,
p(τ |0) =1√2πσ2
0
exp
{− (τ − t0)
2
2σ20
}, (5)
p(τ |1) =1√2πσ2
1
exp
{− (τ − t1)
2
2σ21
}. (6)
The optimum likelihood ratio test based decision is Λ(τ)1≷0
Λ0,
where Λ0 is a pre-specified threshold and the likelihood ratio,Λ(τ), is defined as Λ(τ) = p(τ |1)/p(τ |0). The value of Λ0
that minimizes the average error is unity [15]. From (5) and(6), the optimum decision for Λ0 = 1 can be written as
q(τ) = aτ2 + bτ + c1≷0
0, (7)
where a =(
1σ20− 1
σ21
), b = −2
(t0σ20− t1
σ21
)and c ≈(
t20σ20− t21
σ21
). Let pe(0|1) be the BER when a bit 1 is trans-
mitted by the transmitter and decoded as a 0 by the receiver.Similarly, let pe(1|0) denote the BER due to wrongly decodinga 0 as a 1. The expressions for pe(0|1) and pe(1|0) for thedecision rule in (7) can be written as
pe(0|1) = Q
( |t1 − t0|σ1 + σ0
)− Q
( |t1 − t0||σ1 − σ0|
), (8)
pe(1|0) = Q
( |t1 − t0|σ1 + σ0
)+ Q
( |t1 − t0||σ1 − σ0|
), (9)
where Q(γ) =∫ ∞
γ1√2π
exp{− y2
2
}dy. Let π0 and π1 be the
probabilities of transmitting a 0 and a 1, respectively. Then,pe = pe(0|1)π1 + pe(1|0)π0. When π0 = π1 = 0.5,
pe = Q
(α
σ1 + σ0
), (10)
where α = |t1 − t0|. From (3), (4) and (10)6,
re =2
2tp + 2t0 + α
[1 − 2Q
(α
σ1 + σ0
)]. (11)
The effective goodput of the timing channel can be maximizedby solving the following optimization problem, maxα≥0 re.The value of α that maximizes re, α∗, can then be obtainedby equating dre
dα to zero, i.e., by solving√2π
2tp + 2t0 + α∗
σ1 + σ0e− 1
2
“α∗
σ1+σ0
”2
= 1 − 2Q
(α∗
σ1 + σ0
). (12)
The maximum value of re, reff , can then be obtained as
reff = re(α∗) =2√
2√π(σ1 + σ0)
e− 1
2
“α∗
σ1+σ0
”2
. (13)
It is noted that although (13) seems to suggest that makingα∗ = 0 maximizes reff , it is not so, because α∗ cannot takeany arbitrary value, but only that obtained by solving (12).From (13), the covert timing channel goodput depends on
α∗, which, in turn, depends on tp from (12).
6The expression in (11) assumes t1 > t0. The analysis would be exactlysame if t0 > t1 and results can be obtained by replacing t0 by t1.
48 IEEE JOURNAL ON SELECTED AREAS IN COMMUNICATIONS, ANAND
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
3
3.5
4
Packet time period for the main application, tp (ms)
Effe
ctiv
e tim
ing
chan
nel g
oodp
ut, r
eff (
Kbp
s)
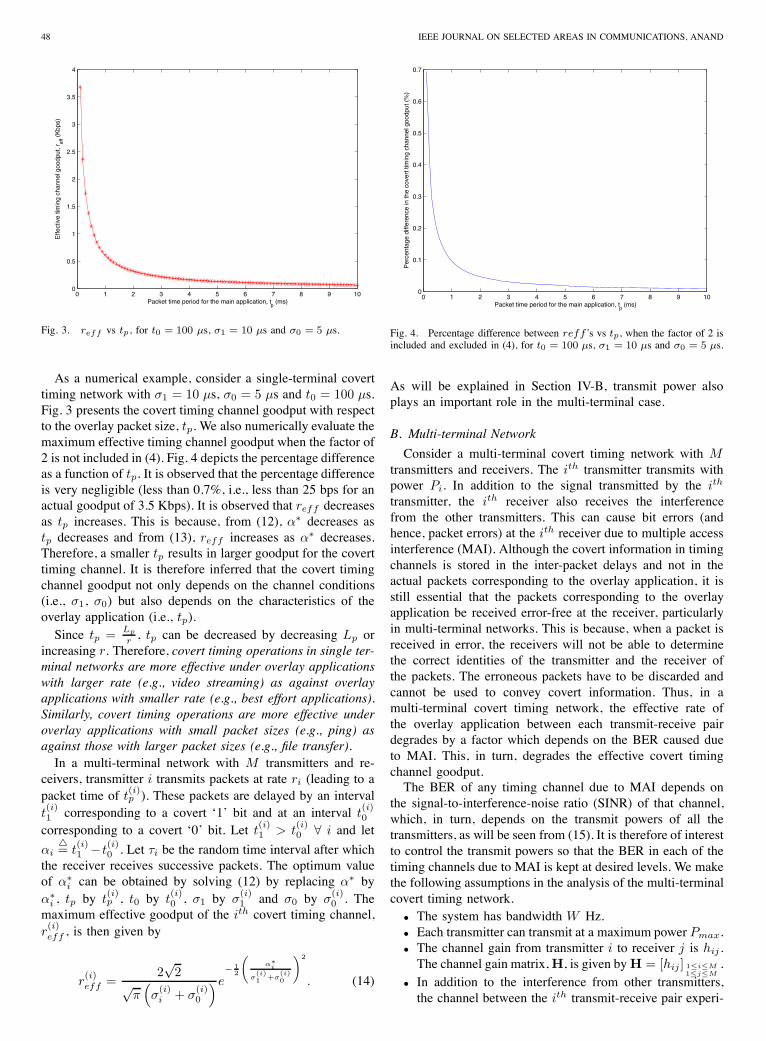
Fig. 3. reff vs tp , for t0 = 100 μs, σ1 = 10 μs and σ0 = 5 μs.
As a numerical example, consider a single-terminal coverttiming network with σ1 = 10 μs, σ0 = 5 μs and t0 = 100 μs.Fig. 3 presents the covert timing channel goodput with respectto the overlay packet size, tp. We also numerically evaluate themaximum effective timing channel goodput when the factor of2 is not included in (4). Fig. 4 depicts the percentage differenceas a function of tp. It is observed that the percentage differenceis very negligible (less than 0.7%, i.e., less than 25 bps for anactual goodput of 3.5 Kbps). It is observed that reff decreasesas tp increases. This is because, from (12), α∗ decreases astp decreases and from (13), reff increases as α∗ decreases.Therefore, a smaller tp results in larger goodput for the coverttiming channel. It is therefore inferred that the covert timingchannel goodput not only depends on the channel conditions(i.e., σ1, σ0) but also depends on the characteristics of theoverlay application (i.e., tp).Since tp = Lp
r , tp can be decreased by decreasing Lp orincreasing r. Therefore, covert timing operations in single ter-minal networks are more effective under overlay applicationswith larger rate (e.g., video streaming) as against overlayapplications with smaller rate (e.g., best effort applications).Similarly, covert timing operations are more effective underoverlay applications with small packet sizes (e.g., ping) asagainst those with larger packet sizes (e.g., file transfer).In a multi-terminal network with M transmitters and re-
ceivers, transmitter i transmits packets at rate ri (leading to apacket time of t
(i)p ). These packets are delayed by an interval
t(i)1 corresponding to a covert ‘1’ bit and at an interval t
(i)0
corresponding to a covert ‘0’ bit. Let t(i)1 > t
(i)0 ∀ i and let
αi�= t
(i)1 −t
(i)0 . Let τi be the random time interval after which
the receiver receives successive packets. The optimum valueof α∗
i can be obtained by solving (12) by replacing α∗ byα∗
i , tp by t(i)p , t0 by t
(i)0 , σ1 by σ
(i)1 and σ0 by σ
(i)0 . The
maximum effective goodput of the ith covert timing channel,r(i)eff , is then given by
r(i)eff =
2√
2√
π(σ
(i)i + σ
(i)0
)e− 1
2
α∗
i
σ(i)1 +σ
(i)0
!2
. (14)
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Packet time period for the main application, tp (ms)
Per
cent
age
diffe
renc
e in
the
cove
rt ti
min
g ch
anne
l goo
dput
(%
)
Fig. 4. Percentage difference between reff ’s vs tp, when the factor of 2 isincluded and excluded in (4), for t0 = 100 μs, σ1 = 10 μs and σ0 = 5 μs.
As will be explained in Section IV-B, transmit power alsoplays an important role in the multi-terminal case.
B. Multi-terminal Network
Consider a multi-terminal covert timing network with Mtransmitters and receivers. The ith transmitter transmits withpower Pi. In addition to the signal transmitted by the ith
transmitter, the ith receiver also receives the interferencefrom the other transmitters. This can cause bit errors (andhence, packet errors) at the ith receiver due to multiple accessinterference (MAI). Although the covert information in timingchannels is stored in the inter-packet delays and not in theactual packets corresponding to the overlay application, it isstill essential that the packets corresponding to the overlayapplication be received error-free at the receiver, particularlyin multi-terminal networks. This is because, when a packet isreceived in error, the receivers will not be able to determinethe correct identities of the transmitter and the receiver ofthe packets. The erroneous packets have to be discarded andcannot be used to convey covert information. Thus, in amulti-terminal covert timing network, the effective rate ofthe overlay application between each transmit-receive pairdegrades by a factor which depends on the BER caused dueto MAI. This, in turn, degrades the effective covert timingchannel goodput.The BER of any timing channel due to MAI depends on
the signal-to-interference-noise ratio (SINR) of that channel,which, in turn, depends on the transmit powers of all thetransmitters, as will be seen from (15). It is therefore of interestto control the transmit powers so that the BER in each of thetiming channels due to MAI is kept at desired levels. We makethe following assumptions in the analysis of the multi-terminalcovert timing network.
• The system has bandwidth W Hz.• Each transmitter can transmit at a maximum power Pmax.• The channel gain from transmitter i to receiver j is hij .The channel gain matrix,H, is given byH = [hij ] 1≤i≤M
1≤j≤M.
• In addition to the interference from other transmitters,the channel between the ith transmit-receive pair experi-

ANAND et al.: POWER CONTROL GAME IN MULTI-TERMINAL COVERT TIMING CHANNELS 49
ences additive white Gaussian noise (AWGN) with powerspectral density N0 Watts/Hz.
The signal-to-interference noise ratio (SINR) obtained bythe ith receiver, xi, is given by
xi =PihiiGi∑
j �=i Pjhji + N0W, (15)
whereGi is the spreading gain at receiver i, given byGi = Wri,
where ri is the rate at which the ith transmitter transmits. Ifthe BER experienced by the ith receiver is BERi(xi), theeffective rate of overlay transmission of the ith transmitter,ui, is
ui = ri(1 − 2BERi(xi)) = rif(xi), (16)
where the factor 2 appears in order to avoid degeneratesolutions and infinite utility [16]. The effective goodput of theith timing channel, r(i)
e , is then given by (11) by replacing t0by t
(i)0 , σ0 by σ
(i)0 , σ1 by σ
(i)1 and tp by t
(i)p = Lp/ui.
It is observed that the effective goodput of the ith timingchannel depends on the SINR, xi, which, in turn, dependson the transmit power Pi of the ith transmitter. Therefore,it is essential to determine the optimal transmit power foreach transmitter that maximizes r
(i)e for each i. It is also
observed from (11) that the effective goodput, re, increaseswhen tp decreases, i.e., ui increases and is maximum whenui is maximum. Therefore, in order the maximize the effectivegoodput of the ith timing channel, it is essential to maximizeui and hence, determine the optimal transmit power for eachtransmitter that maximizes ui ∀ i. Thus, it is observed thatthe optimal transmit powers assist in maximizing the effectivegoodput of all the timing channels. Hence, the network is a“power assisted multi-terminal covert timing network7.”Determining Pi for each i so as to maximize ui for each i
can be formulated as the following optimization problem
maxp ui ∀i (17)
subject to 0 ≤ Pi ≤ Pmax ∀i, (18)
where p =[
P1 P2 · · · PM
]. Since ui depends on
xi, which, in turn depends on the powers transmitted by allthe transmitters, the optimization problem in (17) subject tothe constraints (18) can be modeled as an M−player non-cooperative game. It was shown in [17] that the Nash equilib-rium for the game described by the optimization problem in(17) subject to the constraints in (18) occurs when Pi = Pmax
∀ i, which leads to inefficiency in terms of energy consumptionsince all transmitters transmit at maximum powers. A pricingfunction was proposed in [17], which depended on the SINR,xi to improve the energy efficiency. We apply a similar pricingfunction, which is a function of the SINR, xi given by [17]
up(xi) = λxi
xi + Gi, (19)
where λ is the pricing parameter. Larger values of λ representsheavy pricing and a smaller value indicates light pricing.
7It is noted that the power control is only to maximize the effective rate ofoverlay transmission and hence, does not affect the covertness aspect as wellas the packet count distribution.
Maximizing the goodput of each timing channel in thepower assisted multi-terminal covert timing network incor-porating the pricing function in (19) can be modeled as thefollowing optimization problem.
maxp u(i)net = maxp [ui − up(i)] ∀i (20)
subject to the constraints in (18).The optimization problem described by (20) can also
be modeled as an M−player non-co-operative game. Sinceu
(i)net depends only on xi and not other xj’s, j �= i,
one can obtain x∗i which maximizes u
(i)net ∀ i. Let x∗ �
=[x∗
1 x∗2 · · · x∗
M
]be the vector of optimal xi’s which
solve (20). From x∗, p can be obtained by solving the matrixequation [17]
p∗ = N0W(IM − D1
−1A)−1
D1−1D2
−11, (21)
where IM is theM×M identity matrix, 1 is the column vectorof all 1’s, D1 = diag
(Gi
xi
)1≤i≤M
, D2 = diag (hii)1≤i≤M
and A = [aij ] 1≤i≤M1≤i≤M
, aii = 0 and aij = hji/hii, j �= i. TheNash equilibrium for the game described by the optimizationproblem in (20) is then given by the solution of (21).It is essential to choose f(xi) which is a non-negative
(f(xi) ≥ 0,), increasing (f ′(xi) > 0, concave function(f ′′(xi) < 0), ∀ xi, with f(0) = 0 [18]. The optimum valueof xi’s that solve (20) can be obtained from the first order
necessary condition (i.e., by solving du(i)net
dxi= 0) as the value
of xi that solves
g(xi)�=
(1 +
xi
Gi
)2
f ′(xi) =λ
W. (22)
It is observed from (22) that
g′(xi) =xi + Gi
G2i
[2f ′(xi) + (xi + Gi)f ′′(xi)] .
If f(xi) is chosen such that
2f ′(xi) + (xi + Gi)f ′′(xi) < 0, (23)
the g(xi) is a decreasing function of xi. Although (23) appearsrestrictive, choices of the BER function BERi(xi) for adifferential phase shift keying (DPSK) andM−ary phase shiftkeying [19] results in f(xi) that satisfy (23). The followingtheorems proved in [17] then apply.Theorem 4.1: [17] Let λmax = Wf ′(0). Then, the neces-
sary condition for the optimization problem in (20) to have afeasible solution is λ < λmax.Theorem 4.2: [17] An SINR vector x∗ with all positive
entries results in a power vector p∗ with all positive entries ifand only if the Z-matrix (
IM − D1−1A
)is an M-matrix8.
Theorem 4.3: [17] ∃ λmin such that ∀ λ ∈ (λmin, λmax),with λmax as specified in Theorem 4.1, the Z-matrix(IM − D1
−1A)is an M-matrix and hence, the game de-
scribed by the optimization problem in (20) subject to con-straints (18) has a unique feasible Nash equilibrium.By choosing λ ∈ (λmin, λmax), λmin and λmax, the Nash
equilibrium can be obtained by solving the matrix equation(21). Transmitter i then transmits covert information whose
8Definitions and properties of Z and M−matrices can be found in [17].
50 IEEE JOURNAL ON SELECTED AREAS IN COMMUNICATIONS, ANAND
2 3 4 5 6 7 8 9 10
102.3
102.4
102.5
102.6
102.7
102.8
Rate of Transmission of each user (Mbps)
Effe
ctiv
e tim
ing
chan
nel g
oodp
ut (
bps)
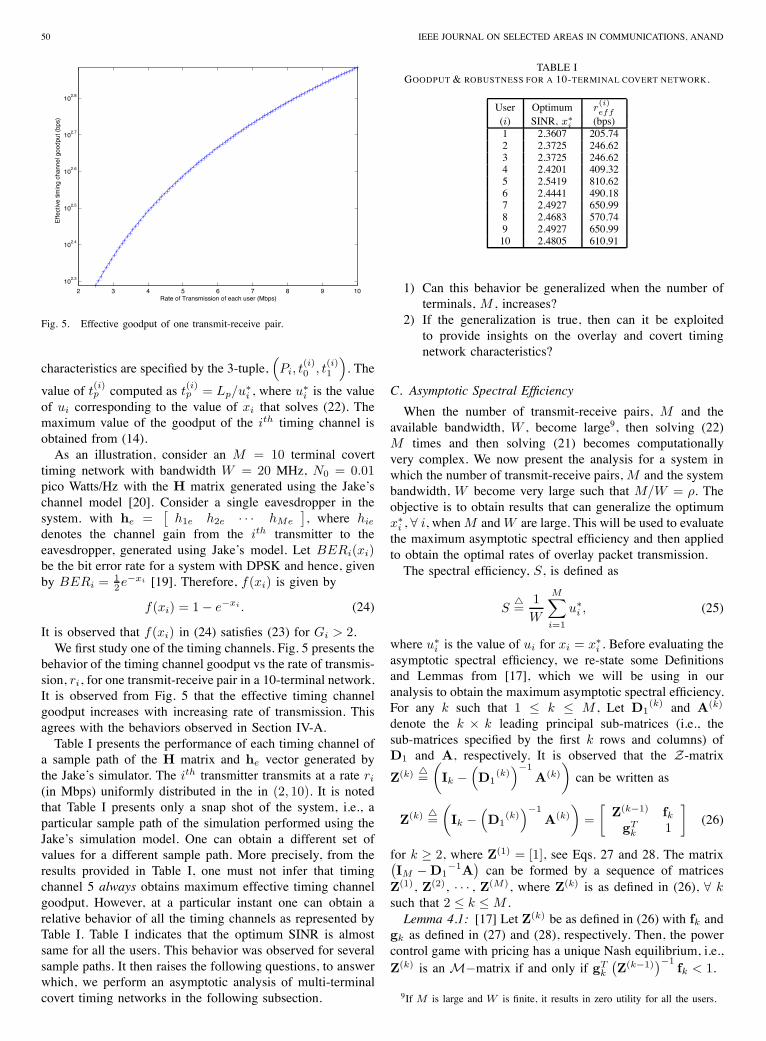
Fig. 5. Effective goodput of one transmit-receive pair.
characteristics are specified by the 3-tuple,(Pi, t
(i)0 , t
(i)1
). The
value of t(i)p computed as t
(i)p = Lp/u∗
i , where u∗i is the value
of ui corresponding to the value of xi that solves (22). Themaximum value of the goodput of the ith timing channel isobtained from (14).As an illustration, consider an M = 10 terminal covert
timing network with bandwidth W = 20 MHz, N0 = 0.01pico Watts/Hz with the H matrix generated using the Jake’schannel model [20]. Consider a single eavesdropper in thesystem. with he =
[h1e h2e · · · hMe
], where hie
denotes the channel gain from the ith transmitter to theeavesdropper, generated using Jake’s model. Let BERi(xi)be the bit error rate for a system with DPSK and hence, givenby BERi = 1
2e−xi [19]. Therefore, f(xi) is given by
f(xi) = 1 − e−xi . (24)
It is observed that f(xi) in (24) satisfies (23) for Gi > 2.We first study one of the timing channels. Fig. 5 presents the
behavior of the timing channel goodput vs the rate of transmis-sion, ri, for one transmit-receive pair in a 10-terminal network.It is observed from Fig. 5 that the effective timing channelgoodput increases with increasing rate of transmission. Thisagrees with the behaviors observed in Section IV-A.Table I presents the performance of each timing channel of
a sample path of the H matrix and he vector generated bythe Jake’s simulator. The ith transmitter transmits at a rate ri
(in Mbps) uniformly distributed in the in (2, 10). It is notedthat Table I presents only a snap shot of the system, i.e., aparticular sample path of the simulation performed using theJake’s simulation model. One can obtain a different set ofvalues for a different sample path. More precisely, from theresults provided in Table I, one must not infer that timingchannel 5 always obtains maximum effective timing channelgoodput. However, at a particular instant one can obtain arelative behavior of all the timing channels as represented byTable I. Table I indicates that the optimum SINR is almostsame for all the users. This behavior was observed for severalsample paths. It then raises the following questions, to answerwhich, we perform an asymptotic analysis of multi-terminalcovert timing networks in the following subsection.
TABLE IGOODPUT & ROBUSTNESS FOR A 10-TERMINAL COVERT NETWORK.
User Optimum r(i)eff
(i) SINR, x∗i (bps)
1 2.3607 205.742 2.3725 246.623 2.3725 246.624 2.4201 409.325 2.5419 810.626 2.4441 490.187 2.4927 650.998 2.4683 570.749 2.4927 650.9910 2.4805 610.91
1) Can this behavior be generalized when the number ofterminals, M , increases?
2) If the generalization is true, then can it be exploitedto provide insights on the overlay and covert timingnetwork characteristics?
C. Asymptotic Spectral Efficiency
When the number of transmit-receive pairs, M and theavailable bandwidth, W , become large9, then solving (22)M times and then solving (21) becomes computationallyvery complex. We now present the analysis for a system inwhich the number of transmit-receive pairs,M and the systembandwidth, W become very large such that M/W = ρ. Theobjective is to obtain results that can generalize the optimumx∗
i , ∀ i, whenM andW are large. This will be used to evaluatethe maximum asymptotic spectral efficiency and then appliedto obtain the optimal rates of overlay packet transmission.The spectral efficiency, S, is defined as
S�=
1W
M∑i=1
u∗i , (25)
where u∗i is the value of ui for xi = x∗
i . Before evaluating theasymptotic spectral efficiency, we re-state some Definitionsand Lemmas from [17], which we will be using in ouranalysis to obtain the maximum asymptotic spectral efficiency.For any k such that 1 ≤ k ≤ M , Let D1
(k) and A(k)
denote the k × k leading principal sub-matrices (i.e., thesub-matrices specified by the first k rows and columns) ofD1 and A, respectively. It is observed that the Z-matrixZ(k) �
=(Ik −
(D1
(k))−1
A(k)
)can be written as
Z(k) �=
(Ik −
(D1
(k))−1
A(k)
)=
[Z(k−1) fk
gTk 1
](26)
for k ≥ 2, where Z(1) = [1], see Eqs. 27 and 28. The matrix(IM − D1
−1A)can be formed by a sequence of matrices
Z(1), Z(2), · · · , Z(M), where Z(k) is as defined in (26), ∀ ksuch that 2 ≤ k ≤ M .Lemma 4.1: [17] Let Z(k) be as defined in (26) with fk and
gk as defined in (27) and (28), respectively. Then, the powercontrol game with pricing has a unique Nash equilibrium, i.e.,Z(k) is an M−matrix if and only if gT
k
(Z(k−1)
)−1fk < 1.
9If M is large and W is finite, it results in zero utility for all the users.

ANAND et al.: POWER CONTROL GAME IN MULTI-TERMINAL COVERT TIMING CHANNELS 51
fk�=
[− x∗
1hk1G1h11
− x∗2hk2
G2h22− x∗
3hk3G3h33
· · · − x∗k−1hkk−1
Gk−1hk−1k−1
]T
, (27)
gk�=
[− x∗
kh1k
Gkhkk− x∗
kh2k
Gkhkk− x∗
kh3k
Gkhkk· · · −x∗
khk−1k
Gkhkk
]T
. (28)
Lemma 4.2: [17] Let Z(k) be as defined in (26) with fkand gk as defined in (27) and (28), respectively. Then, thefunction gT
k
(Z(k−1)
)−1fk is an increasing function of x, ∀ k
such that 2 ≤ k ≤ M , i.e., gTk
(Z(k−1)
)−1fk increases when
every term in x increases.Lemmas 4.1 and 4.2 yield the following Theorems.Theorem 4.4: For large M and W such that M/W = ρ,
all transmit-receive pairs obtain equal optimum SINR, x∗i .
Proof: Let G =[
G1 G2 · · · GM
]. Let Gmax be
the maximum entry in G. Let Gmax denote the vector Gwith all entries as Gmax. Let θ(x,G)
�= gT
M
(Z(M−1)
)−1fM .
θ(x,G) < 1 for a Nash equilibrium to exist. Let Γ bethe values of xi such that f ′(Γ) = λ
W . Since f(xi) is aconcave function, f ′(xi) is a non-increasing function of xi.Therefore, from(22), xi ≥ Γ ∀ i. From Lemma 4.2, and thedefinition of θ(x,G), θ(x,G) > θ(Γ,G), where Γ is thevector with all entries as Γ. Similarly, θ(x,G) is a decreasingfunction of G and hence θ(x,G) > θ(x,Gmax). Therefore,θ(x,G) > θ(Γ,Gmax). The Perron-Frobenius eigen valueof A, χ(A) < 1 [21]. Therefore, θ(Γ,Gmax) can be upperbounded by replacing all the off-diagonal elements of Z(M−1)
by −1.(Z(M−1)
)−1can then be evaluated using the Sherman-
Morrison formula [22] to yield
θ(Γ,Gmax) ≤ Γ2(M − 1)2
G2max
. (29)
The above bound becomes equal to 1 when
Γ =Gmax
M − 1=
1rmin
(ρ − 1
W
) , (30)
where rmin = mini ri. Γ < 1
rmin(ρ− 1W ) , which is finite
for large M , W . Similarly, using the fact that θ(x,G) <θ(x,Gmin), where Gmin is the vector with all entries Gmin
where Gmin is the minimum of all the entries in G, x isalso finite for large M , W . Since Gi = W/ri, Gi can bearbitrarily large for large W . Therefore from (22), for largeM , W , f ′(x∗
i ) = λW . Since f ′(Γ) = λ
W , x∗i = Γ ∀ i. Thus all
transmit-receive pairs obtain equal optimum SINR.It is observed that when all users10 transmit at equal rates (i.e.,with equal Gi’s), the optimum SINR,s are equal (from (22)).Theorem 4.4 implies that even in the case when all transmitterstransmit at unequal rates, all receivers asymptotically obtainequal optimum SINR, Γ, whose value is provided by thefollowing theorem.Theorem 4.5: The SINR, Γ, is given by
Γ =v(λ)M∑M
i=1 ri
, (31)
10The terms “users” and “transmit-receive pairs” indicate the same.
where v(λ) is an increasing function of λ such that v (λmin) =0 and v (λmax) = 1.
Proof: θ(Γ,G) < 1. Therefore θ(Γ,G) = v(λ), wherev(λ) is an increasing function of λ such that v (λmin) = 0and v (λmax) = 1. Note that θ(Γ,G) = gT
M
(Z(M−1)
)−1fM .
Replacing Gn = Gmin in gM , replacing the off-diagonalelements by 0 (this is possible since the optimum SINR isfinite and Gi → ∞ as W → ∞) in Z(M−1) and usingthe fact that χ(A) < 1, we obtain Γ ≥ v(λ)WP
Mi=1 ri
. Similarly,replacing Gn = Gmin in gM , and replacing the off-diagonalelements by 0 in Z(M−1) we obtain Γ ≤ v(λ)WP
Mi=1 ri
. Eqn. (31)then immediately follows.Theorem 4.6: The maximum asymptotic spectral efficiency
of the power assisted multi-terminal covert timing network, η,is given by
η = min (f ′(0), ρrmax) , (32)
where rmax = maxi ri.Proof: Let Γ̂ = supλ Γ. From Theorem 4.5, Γ̂ = WPM
i=1 ri,
and using (25) and Theorem 4.4, the asymptotic spectralefficiency is S(Γ̂) = f(Γ̂)
Γ̂. From the first order necessary
conditions for maxima, the optimum value of Γ̂ that maximizesS(Γ̂), Γ∗, is obtained by equating S′(Γ̂) to zero, i.e., as thesolution to
Γ∗f ′(Γ∗) − f(Γ∗) = 0. (33)
The second derivative of S(Γ̂) evaluated at Γ̂ = Γ∗ isS′′(Γ∗) = f ′′(Γ∗)
(Γ∗)2, which is negative since f(xi) is a concave
function. Therefore Γ∗ obtained by solving (33) maximizesthe asymptotic spectral efficiency.The tangent, T (Γ∗), to the curve f(Γ̂) at the point Γ̂ = Γ∗is
the line satisfying
Y − f(Γ∗) = f ′(Γ∗)(X − Γ∗), (34)
which, from (33), yields Y = Xf ′(Γ∗), which represents aline passing through (0, 0). Therefore T (Γ∗), intersects thecurve at two points, (0, 0) (since f(0) = 0) and (Γ∗, f(Γ∗)).Since T (Γ∗) is a tangent, Γ∗ = 0.Let the maximum value of S(Γ̂) (evaluated at Γ̂ = Γ∗) be
η. Since Γ∗ = 0, η can be written as
η = limΓ̂→0
S(Γ̂) = limΓ̂→0
f(Γ̂)Γ̂
= f ′(0), (35)
by applying L’Hospital’s rule. Note that since ri ≤ rmax ∀ i,S(Γ̂) ≤ ρrmax with equality if and only if ri = rmax, ∀ i.Thus, η ≤ ρrmax and (32) follows.From Theorem 4.6, the maximum asymptotic spectral effi-ciency is obtained when ρrmax = f ′(0), i.e., all transmitterstransmit at a rate rmax = f ′(0)
ρ . Thus, for a system with finite

52 IEEE JOURNAL ON SELECTED AREAS IN COMMUNICATIONS, ANAND
0 100 200 300 400 500 600 700 800 900 100010
0
101
102
103
Number of transmitter−receiver pairs (M)
Effe
ctiv
e tim
ing
chan
nel g
oodp
ut, r
eff (
bps)
Fig. 6. Covert timing channel goodput when transmitters transmit over-laypackets at asymptotically optimal rates.
bandwidth, W and finite number of transmit-receive pairs, M
and ρ�= M/W , the optimum rate of overlay transmission is
rmax = f ′(0)ρ for all transmit-receive pairs. The power control
mentioned in Section IV-B is then applied to determine theoptimal SINR’s at all the receivers and the optimal transmitpowers of all the transmitters. From the values of the optimalSINR’s, the effective rate of overlay transmission and thus,the optimal timing channel goodputs can be determined byapplying the analysis described in Section IV-A.Goodman and Mandayam [23] presented a network assisted
power control mechanism for single-cell wireless data net-works. This corresponds to a special case of multiple transmit-ters and single receiver in the analysis in this paper. Anotherfundamental difference between this research and [23] is that,in [23], all users transmit with equal rates and for this scenario,an optimal SINR threshold is determined. Theorem 4.4 showsthat irrespective of the rates of transmission, asymptotically,all users obtain equal optimal SINR.Fig. 6 presents the effective channel goodput with respect
to the number of terminals in the network, when all userstransmit at a rate that maximizes the asymptotic spectralefficiency. From Theorem 4.6, this value is Wf ′(0)/M . Thusit is expected that the optimal rates of overlay packet trans-mission decrease with increasing M . This therefore results indecreasing effective timing channel goodput. In [13] and [14],we had shown that more transmit-receive pairs result in morerobust covert timing channels. Fig. 6 therefore presents thedegradation in the goodput of covert timing channels whenhigh robustness is desired.
V. CONCLUSION
We analyzed the factors of the overlay communication thataffect the goodput of multi-terminal covert timing networks.The key inferences include
• Covert timing channels are more effective under overlayapplications with larger rates of transmission (e. g., videostreaming) or with smaller packet sizes (e.g., ping).
• In a multi-terminal network, asymptotically all the re-ceivers receive equal SINR irrespective of the transmis-sion rates and the relative locations from the transmitters.
REFERENCES
[1] B. Lampson, “A note on the confinement problem,” ACM Comm., 1973.[2] V. Anantharam and S. Verdu, “Bits through queues,” IEEE Trans. Inf.
Theory, vol. 42, no. 1, pp. 4–18, Jan. 1996.[3] D. Forte, C. Maruti, M. Vetturi, and M. Zambelli, “SecSyslog: An
approach to secure logging based on covert channels,” Intl. Workshopon Systematic Approaches to Digital Forensic Engg., Nov. 2005.
[4] I. S. Moskowitz and A. R. Miller, “Simple timing channels,” Proc. IEEEComp. Soc. Symposium on Research in Security and Privacy, 1994.
[5] T. Saengudomlert, “Capacity of single-server queues.” [Online].Available: www.mit.edu/6.454/www spring 2001/tengo/summary.pdf
[6] X. Liu and R. Srikant, “Bounds on the sum timing capacities of single-server queues with multiple input and output terminals,” Proc. DIMACSWorkshop on Network Information Theory, Mar. 2003.
[7] A. B. Wagner and V. Anantharam, “Zero-rate reliability of theexponential-server timing channel,” IEEE Trans. Inf. Theory, vol. 51,no. 2, pp. 447–465, Mar. 2005.
[8] Z. Wang and R. B. Lee, “Capacity estimation of non-synchronous covertchannels,” IEEE Intl. Conf. on Dist. Computing Sys., Jun. 2005.
[9] V. Berk, A. Giani, and G. Cybenko, “Detection of covert channelencoding in network packet delays,” Tech. Rep. TR2005-536, DartmouthCollege, Computer Science, Hanover, NH, USA, Aug. 2005.
[10] S. Lin and D. Costello, Error Control Coding. Prentice Hall, 2003.[11] S. Cabuk, C. E. Brodley, and C. Shields, “IP covert timing channels:
Design and detection,” ACM CCS’04, Oct. 2004.[12] S. Gianvecchio and H. Wang, “Detecting covert timing channels: An
entropy based approach,” ACM CCS’07, Oct. 2007.[13] S. Sengupta, S. Anand, K. Hong, and R. Chandramouli, “On adversarial
games in dynamic spectrum access networking based covert timingchannels,” ACM SIGMOBILE Mobile Computing and CommunicationsReview (MC2R), Special Issue on Cognitive Radio Technologies andSystems, vol. 13, no. 2, pp. 96–107, Apr. 2009.
[14] S. Anand, S. Sengupta, and R. Chandramouli, “An attack-defense gametheoretic analysis of multi-band wireless covert timing networks,” Proc.IEEE Intl. Conf. on Computer Commun. (INFOCOM’2010), Mar. 2010.
[15] M. D. Srinath and P. K. Rajasekaran, An introduction to statistical signalprocessing with applications. John Wiley and Sons, 1978.
[16] C. U. Saraydar, N. B. Mandayam, and D. J. Goodman, “Efficient powercontrol via pricing in wireless data networks,” IEEE Trans. Commun.,vol. 50, no. 2, pp. 291–303, Feb. 2002.
[17] S. Anand and R. Chandramouli, “Applcation of M−matrices.”[18] H. Varian, Intermediate Microeconomics: A Modern Approach.
W. W. Norton and Co., 1996.[19] J. G. Proakis, Digital Communications. McGraw Hill Intl., 2001.[20] T. S. Rappaport, Wireless Communications: Principles and Practice.
Prentice Hall Inc., New Jersey, 1996.[21] Y. Xing, C. N. Mathur, M. A. Haleem, R. Chandramouli, and K. P.
Subbalakshmi, “Priority based dynamic spectrum access with qos andinterference temperature constraints,” IEEE ICC’2006, Jun. 2006.
[22] C. D. Meyer, Matrix Theory and Applied Linear Algebra. SIAM, 1972.[23] D. J. Goodman and N. B. Mandayam, “Network assisted power control
for wireless data,” Mobile Networks and Applications, vol. 6, no. 5, pp.409–418, Sep. 2001.

ANAND et al.: POWER CONTROL GAME IN MULTI-TERMINAL COVERT TIMING CHANNELS 53
S. Anand received his B.E. degree from the Collegeof Engineering Guindy, Chennai, India, in 1995 andhis M.E. degree and Ph.D. degree from the IndianInstitute of Science, Bangalore, India, in 1998 and2003, respectively. During 2004-2006, he was withSamsung India Software Operations Pvt. Ltd. Heis currently a research associate at the Departmentof ECE in Stevens Institute of Technology. Hiscurrent areas of research include dynamics of socialnetworks, spectrum management and security in dy-namic spectrum access networks and covert timing
channels.Dr. Anand received the Seshagiri Kaikini medal for the best Ph.D. dis-
sertation in the electrical sciences division, Indian Institute of Science forthe academic year 2003-2004. He has represented Samsung Electronics in3GPP SA2 and IEEE 802.20 standardization meetings. For more information:http://personal.stevens.edu/∼asanthan
S. Sengupta is an Assistant Professor in the De-partment of Mathematics and Computer Science,John Jay College of Criminal Justice of the CityUniversity of New York. He received his B.E. de-gree in Computer Science from Jadavpur University,India in 2002 and the Ph.D. degree from the Schoolof Electrical Engineering and Computer Science,University of Central Florida, Orlando in 2007. Hisresearch interests include cognitive radio, dynamicspectrum access, game theory, security in wirelessnetworking.
Dr. Sengupta is in the organizing and technical program committee ofseveral IEEE conferences. He is the recipient of an IEEE GLOBECOM 2008best paper award. At John Jay College, Dr. Sengupta co-founded the Securityin Wireless and Ad hoc Networks Lab (SWAN Lab). For more information:http://jjcweb.jjay.cuny.edu/ssengupta/
K. Hong received his B.S. degree in AutomaticControl from Beijing Institute of Technology in2004 and his M.S. degree in Automatic Controlfrom Beijing Institute of Technology in 2007. He iscurrently a PhD candidate in Computer Engineeringat Stevens Institute of Technology where he is amember of the Media Security, Networking, andCommunications (MSyNC) Lab. His research focusis in the area of Cognitive Radio, dynamic spectrumaccess networks and wireless security.
R. Chandramouli (Mouli) is the Thomas HattrickChair Professor of Information Systems in the De-partment of Electrical and Computer Engineering(ECE) at Stevens Institute of Technology and Co-Founder of inStream Media, LLC—a technologycompany offering social media security solutions.His research spans the areas of wireless networkingand security, and social media security, forensics andanalysis. Projects in these areas are supported by theNational Science Foundation, National Institute ofJustice, U.S. Department of Defense Agencies and
industry.Prof. Mouli was an invited member of the White House Communications
Roundtable to give inputs on the National Wireless Initiative, Founding Chairof the IEEE COMSOC Technical Committee on Cognitive Networks (TCCN),TCCN’s representative to the IEEE COMSOC Standards Board, Editor of theIEEE Journal on Selected Areas in Communications (JSAC) Cognitive RadioSeries, Editor of the Advances in Multimedia Journal, Associate Editor of theIEEE Transactions on Circuits and Systems for Video Technology, and is onthe International Advisory Boards of several international conferences.Prof. Mouli is the recipient of an IEEE GLOBECOM 2008 Best Paper
Award, IEEE CCNC 2006 Best Student Paper Award, NSF CAREER Award,and IEEE Richard E. Merwin Scholarship. His group has been developingand demonstrating a cognitive radio network prototype for dynamic spectrumaccess called SpiderRadio. inStream Media, LLC, a company that he co-founded commercializes his research on advanced statistical psycho-linguisticand information theoretic analytics for social network security and forensics.For more information: http://www.ece.stevens-tech.edu/∼mouli
Copyright © 2022 FDOKUMEN