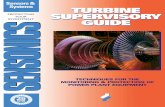
Pitch-Controlled Variable-Speed Wind Turbine Generation National Renewable Energy Laboratory
10
Pitch-Controlled Variable-Speed Wind Turbine Generation February 2000 NREL/CP-500-27143 E. Muljadi and C.P. Butterfield Presented at the 1999 IEEE Industry Applications Society Annual Meeting Phoenix, Arizona October 3-7, 1999 National Renewable Energy Laboratory 1617 Cole Boulevard Golden, Colorado 80401-3393 NREL is a U.S. Department of Energy Laboratory Operated by Midwest Research Institute • Battelle • Bechtel Contract No. DE-AC36-99-GO10337
-
Upload
independent -
Category
Documents
-
view
4 -
download
0
Transcript of Pitch-Controlled Variable-Speed Wind Turbine Generation National Renewable Energy Laboratory

Pitch-Controlled Variable-SpeedWind Turbine Generation
February 2000 � NREL/CP-500-27143
E. Muljadi and C.P. Butterfield
Presented at the 1999 IEEE Industry ApplicationsSociety Annual MeetingPhoenix, ArizonaOctober 3-7, 1999
National Renewable Energy Laboratory1617 Cole BoulevardGolden, Colorado 80401-3393NREL is a U.S. Department of Energy LaboratoryOperated by Midwest Research Institute •••• Battelle •••• Bechtel
Contract No. DE-AC36-99-GO10337

NOTICEThe submitted manuscript has been offered by an employee of the Midwest Research Institute (MRI), acontractor of the US Government under Contract No. DE-AC36-99GO10337. Accordingly, the USGovernment and MRI retain a nonexclusive royalty-free license to publish or reproduce the publishedform of this contribution, or allow others to do so, for US Government purposes.
This report was prepared as an account of work sponsored by an agency of the United Statesgovernment. Neither the United States government nor any agency thereof, nor any of their employees,makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy,completeness, or usefulness of any information, apparatus, product, or process disclosed, or representsthat its use would not infringe privately owned rights. Reference herein to any specific commercialproduct, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarilyconstitute or imply its endorsement, recommendation, or favoring by the United States government or anyagency thereof. The views and opinions of authors expressed herein do not necessarily state or reflectthose of the United States government or any agency thereof.
Available electronically at http://www.doe.gov/bridge
Available for a processing fee to U.S. Department of Energyand its contractors, in paper, from:
U.S. Department of EnergyOffice of Scientific and Technical InformationP.O. Box 62Oak Ridge, TN 37831-0062phone: 865.576.8401fax: 865.576.5728email: [email protected]
Available for sale to the public, in paper, from:U.S. Department of CommerceNational Technical Information Service5285 Port Royal RoadSpringfield, VA 22161phone: 800.553.6847fax: 703.605.6900email: [email protected] ordering: http://www.ntis.gov/ordering.htm
Printed on paper containing at least 50% wastepaper, including 20% postconsumer waste

1
PITCH-CONTROLLED VARIABLE-SPEEDWIND TURBINE GENERATION
E. Muljadi C.P. Butterfield
National Wind Technology CenterNational Renewable Energy Laboratory (NREL)
1617 Cole BoulevardGolden, CO 80401, U.S.A.
Abstract - Wind energy is a viable option tocomplement other types of pollution-free generation.In the early development of wind energy, themajority of wind turbines were operated at constantspeed. Recently, the number of variable-speed windturbines installed in wind farms has increased andmore wind turbine manufacturers are makingvariable-speed wind turbines.
This paper covers the operation of variable-speed wind turbines with pitch control. The systemwe considered is controlled to generate maximumenergy while minimizing loads. The maximization ofenergy was only carried out on a static basis andonly drive train loads were considered as aconstraint. In medium wind speeds, the generatorand power converter control the wind turbine tocapture maximum energy from the wind. In thehigh wind speed region, the wind turbine iscontrolled to maintain the aerodynamic powerproduced by the wind turbine. Two methods toadjust the aerodynamic power were investigated:pitch control and generator load control, both ofwhich are employed to control the operation of thewind turbine.
Our analysis and simulation shows that thewind turbine can be operated at its optimum energycapture while minimizing the load on the windturbine for a wide range of wind speeds.
INDEX TERMS
Wind turbine generator, renewable energy, pitch-controlled, variable speed.
I. INTRODUCTION
The development of wind turbine powergeneration has been expanding during the past 10 years.The global market for the electrical power produced bythe wind turbine generator (WTG) has been increasingsteadily, which directly pushes the wind technology into
a more competitive arena. Recently, there have beenpositive trends shown by the utilities to offer renewableenergy to customers. Many customers who areenvironmentally conscious now have the option ofsubscribing to clean energy such as wind energy fromthe power provider. The European market has shownan ever-increasing demand for wind turbines.
Variable-speed wind turbine generation has beengaining momentum, as shown by the number ofcompanies joining the variable-speed WTG market.Variable-speed generation is claimed to have a betterenergy capture and lower loading. The effect ofturbulence on energy capture and power fluctuations invariable-speed wind turbines is affected by the overallcontrol algorithm used [1-4]. The method ofcontrolling the generator strongly affects the electricalpower generated by the generator [2]. Different typesof generators are used for variable-speed generation fordirect drives [2-3]; however, control algorithms forwind turbine operation are not discussed in thesepapers.
The goal of this project is to study the behavior ofthe wind turbine generator operated under variablespeed with pitch-control capability under turbulentwinds. The basic comparison between a constant-speedwind turbine and a variable-speed wind turbine will alsobe explained. The constant-speed wind turbine
Pow er C onverter+ G enerator
P itchab le B lade
G ear B ox
U tility(60 H z)
W ind
L ow speed shaft
H igh speed shaft
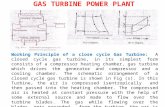
Figure 1. Physical diagram of the system

2
operation is a very simple case that can be used as abaseline. The variable-speed algorithm was chosenbased on the maximum energy and steady-state limit ofthe wind turbine. The steady-state limit is based on theCP-TSR curve provided. Thus in the steady statecalculation, wind gust and wind shear are notconsidered. It turns out that using the steady state limitis a good approximation in the lower wind speeds, asshown by the performance ratio and energy captured bythe wind turbine.
One concept that is fundamental to the controldynamics is that the speed change is relatively slowbecause of the large inertia involved. This makes itdifficult to use the power converter to control the speedin highly variable wind applications. Pitch control isrelatively fast, however, and can be better used toregulate power flow especially when near the highspeed limit.
Figure 1 shows the system under consideration.The wind turbine is connected to a variable-speed windturbine. The generator output can be controlled tofollow the commanded power. The wind turbine has apitchable blade to control the aerodynamic power. Thedashed line indicates that the pitch angle can becontrolled. It is shown that there is a mechanicalcomponent (such as a gearbox) between the high-speedshaft and the low-speed shaft. The low-speed shaft isdriven by the turbine blades, which generatesaerodynamic power. The high-speed shaft is loaded bythe electric generator in the form of electrical load.
The paper is organized as follows: The nextsection is devoted to the condition of the wind data.The third section is devoted to the method of control.In the fourth section, the discussion and analysis ispresented, and in the fifth section, the conclusion ispresented.
II. WIND TURBINE CHARACTERISTICS
The wind turbine can be characterized by its CP -TSR (curve as shown in Figure 2), where the TSR is thetip-speed ratio; that is, the ratio between the linearspeed of the tip of the blade with respect to the windspeed. It is shown that the power coefficient CP varieswith the tip-speed ratio. It is assumed that the windturbine is operated at high CP values most of the time.In a fixed-frequency application, the rotor speed of theinduction generator varies by a few percent (based onthe slip) above the synchronous speed while the speedof the wind may vary across a wide range.
In Figure 2, the change of the CP-TSR curve as thepitch angle is adjusted is also shown. In low to mediumwind speeds, the pitch angle is controlled to allow thewind turbine to operate at its optimum condition. In the
high wind speed region, the pitch angle is increased toshed some of the aerodynamic power.
From Equation 1, the tip-speed ratio for a fixedspeed wind turbine varies across a wide rangedepending on the wind speed. The power captured bythe wind turbine may be written as Equation 2. FromEquation 2, it is apparent that the power productionfrom the wind turbine can be maximized if the system is
(4)
(3)
)(RPM K = P
TSR
RCA0.5 = P
3PTARGET
3m
TARGET
3
pTARGET TARGET ωρ ��
���
�
speedrotorRPM _
data turbine windcomputed = K P
TSRat CpCp
)C p(max power Target =P
:where
TARGETTARGET
TARGET
=
=
(m/s) velocity wind= V
turbinewindoftcoefficien = Cp
m2 ( areaswep =A
m3(kg/density air =
:where
(2) V3CpA0.5 = Pmech
)t
)ρ
ρ
V
R m = R
meter/sec wind theof speedlinear = Vmeter blade theof radius = R
radian/sec mechanical speedrotor = m
:where
(1)TS
ω
ω
Cp for different Pitch Angle
0
0.1
0.2
0.3
0.4
0.5
0.6
0 5 10 15TIP-SPEED RATIO (TSR)
C p (P
ower
Coe
ffici
ent)
Angle = 0 degAngle = 6 degAngle = 10 deg
Figure 2. Power coefficient Cp versus tip-speed ratio

3
operated at maximum CP. As the wind speed changes,the rotor speed should be adjusted to follow the change.This is possible with a variable-speed wind turbine.Unfortunately, it appears that the wind speed cannot bereliably measured. To avoid using the wind speed, theequation to compute the target power can be rewrittenby substituting the wind speed V and the CP. The targetpower PTARGET can be written as in Equation 3, or in itcan be written in its simple form shown in Equation 4. Itcan be seen that the PTARGET is proportional to the cubeof the rotor speed.
For simulations used in this study, the wind inputdata is a time series of wind data of different turbulenceconditions. To reduce the computing time, the inputdata (the wind speed) of a 10-minute time series is used.The work performed in this project was based on ageneric wind turbine. The physical dimension and theCP-TSR characteristic of the wind turbine are the inputsfor this program. The inertia of the blade and the inertiaof the generator are given. The stiffness of the shaft andthe damping are given. The induction generatormodeled is a wound-rotor induction generation with thestator connected to the utility and the rotor windingconnected to the power converter. The generator canbe controlled to respond to the torque command almostinstantaneously.
III. METHOD OF CONTROL
A. Wind Turbine Power Generation
The simplest wind turbine architecture is theconstant rotor speed and constant pitch wind turbine.Figure 3 shows a typical aerodynamic power for twodifferent wind speeds as the rotor revolutions perminute (rpm) is varied. As shown in Figure 3, themaximum CP operation is represented by the thick line.The wind turbine operating in a single rpm will only beoptimized at a single wind speed. For example, if thewind turbine is operated at 1500 rpm, at 20 m/s windspeed, the wind turbine operates at point B�, which isnot optimum power. At 15 m/s, for 1500 rpm, the windturbine operates at point B, which is the optimumoperating point. Similarly, the operation of the windturbine at 2000 rpm is optimized only at 20 m/s, and isnot optimized at 15 m/s.
In variable speed operation, we must considerblade inertia. Wind turbine blades have a large inertiacompared to the inertia of the generator. The inertia ofthe rotor behaves like an inductor in an electricalcircuit. It helps smooth the rotor speed variation, and itstores energy during acceleration and restores energyduring deceleration. A power flow diagram of variable-
speed operation is shown in Figure 4. In this figure, itis assumed that the operating CP is constant at CPmax.Pwind is the aerodynamic power that can be extractedfrom the wind. Pcaptured is the actual aerodynamic powercaptured by the wind turbine. Pelectric is the power thatcan be converted to electric power. When theaerodynamic power is higher than the generator power(Pelectric), the rotor rpm increases and the kinetic energyin the rotor blade increases. The rate of increase in thekinetic energy is the power difference between theaerodynamic power and the generator power, which iscalled Paccel and Pdecel in Figure 4.
A c c e le r a t io n
D e c e le r a t io n
P w in dP e l e c t r ic
P e le c t r ic
K in e t icE n e r g y
K in e t icE n e r g y
P w in d P c a p tu re d
P c a p tu re d
P w in d
P a c c e l
P e l e c t r icP d e c e l
P e le c t r ic
K in e t icE n e r g y
P w in d P c a p tu re d
P c a p tu re d
Figure 4. Kinetic energy in the turbine at constant CPduring acceleration and deceleration
Figure 3. Aerodynamic power versus rpm for twodifferent wind speeds
1000 1500 20000
50
100
High speed shaft rotor speed (rpm)
Aer
odyn
amic
pow
er (k
W)
15 m/s
20 m/s
B�
BA�
A
Cpmaxoperation

4
The operation of the wind turbine along the CP -TSR curves governs the power intake from the wind.The power captured by the wind turbine is affected bythe operating CP on the CP -TSR curve. Figure 5 showsthe operation of the wind turbine for different powercoefficients. In Figure 5, only static power flow isconsidered. In the actual case, Pelectric must be greaterthan Pcaptured to dynamically force the wind turbine tostall. In Figure 5a, the wind turbine is operated atmaximum CP. Thus, the aerodynamic efficiency is veryhigh, and the power captured from the wind is optimum.The Pwind = PCaptured = Pelectric. When the wind turbine isoperated in the stall condition, the power that can becaptured from the wind is not optimum. The powerdifference between the possible power captured and theactual power captured from the wind is indicated asPCploss. The wind turbine can be forced to operate in thestall condition if the generator is loaded higher than theCPmax operation. The wind turbine will operate in thelower TSR region. This mode of operation is suitablefor wind turbines that do not have pitch controlcapability.
B. Variable Pitch Wind Turbine Generation
Variable pitch control can be used to shed theaerodynamic power generated by the wind turbine.Thus, the aerodynamic power produced by the windturbine can be controlled by adjusting the pitch angle ofthe wind turbine. Figure 6 shows the effect of pitchcontrol on power flow in wind turbine generation. Withpitch control, the power captured, Pcaptured, from thewind power Pwind can be controlled by a pitch actuator.The acceleration and deceleration is the result of the
difference between the input power to the generator andthe aerodynamic power captured by the wind turbine.Theoretically, at constant electric load, the accelerationand deceleration can be made zero if the pitch can becontrolled fast enough to react to the wind speed suchthat the power captured from the wind is equal to theelectric power (Pcaptured = Pelectric). For example, in thehigh wind speed region when the rotor speed limit isreached, the pitch can be controlled to keep the rotorrpm from exceeding its limit.
C. Overall control strategy
There are many quantities that must be consideredfor wind turbine generation. However, in this paper,there are two quantities considered: the electrical outputpower and the rotor speed. In general, the electricaloutput power should be smooth and non-fluctuating.This requirement is very easy to fulfill because thepower converted into electrical power is controllable
instantly at any time (providing the generator and powerconverter power are below their rated values). If the
F ig u r e 5 a : M a x C p
F ig u r e 5 b : S ta l l C p
P w in d
P w in d
P e l e c t r ic
P e l e c t r ic
P C p lo ss
M a x C p
P C p l o ss
S ta l l C p
P c a p t u re d
P c a p tu re d
Figure 5. Power flow at different power coefficients
F ig u r e 6 a : p itc h c o n s ta n t
F ig u r e 6 b : p itc h to f e a th e r
P w in d
P a c c e l
P e le c t r ic
P w in d
P a c c e l
P e le c t r ic
P a e ro _ lo ss ( d u e to p itch in g )
K in e ticE n e r g yω m in c r ea se s
K in e t ic E n e r g y n eg l ig ib leω m c o n s ta n t
P c a p tu re d
P c a p tu re d
Figure 6. Effect of pitch control on power flow inwind turbine generation

5
power is controlled to be constant, theacceleration/deceleration or rotor speed variesaccording to the difference between the power capturedfrom the wind and the power generated to the utility. Inthis paper, the electrical power is not controlled to beconstant all the time. It is controlled based on the rpmschedule as shown in Figure 7.
The rotor speed can be controlled by controllingthe difference between the electrical output power andthe power captured aerodynamically Pcaptured. Withadjustable pitch, the Pcaptured can be controlled, and witha power converter, the electrical output power can becontrolled. Therefore, the rotor speed can becontrolled. The ability to control the rotor speed in thehigh wind speed region is dependent on the pitch-actuator response limit and the rating of the powerconverter. If the pitch actuator is too slow and thepower converter size is too small, the controllability ispoor. The wind turbine can be controlled to pitch-to-feather or pitch-to-stall. However, it is more commonthat the wind turbine is pitched to feather to reduce theaerodynamic power Pcaptured.
How do we achieve zero acceleration in the rpmlimit? Two ways can be used to control zeroacceleration. One is to control the aerodynamic powercaptured by the blades (pitch to stall), and the other is tocontrol the output power of the generator (stall theturbine by increasing the load).
The capability to control aerodynamic power islimited by the pitch rate, the control algorithm, and theshape of the CP curve as a function of pitch angle.
The capability to control generator output islimited by the voltage and current rating of thegenerator and power converter. In general, thegenerator current limit related to the torque limit and thevoltage limit is related to the frequency or speed limit ofthe generator.
Lower to medium wind speedIdeally, the wind turbine should be operated at
maximum CP most of the time. The control strategyused in this paper is presented in Figure 7. In the lowerwind speed, when the aerodynamic power produced bythe wind turbine is below the maximum power rating ofthe power converter, the wind turbine is operated in theCPmax. The pitch angle of the wind turbine is controlledto have the maximum possible CPmax. As the rpmchanges, the pitch angle is kept at its optimum pitchangle.
The electrical power is controlled by adjusting theelectrical power output of the generator. The algorithmis used to control the generated power by controlling thepower based on the rpm. Thus, the P(rpm) map can beused according to Equation 4. The pitch angle isgenerally held to achieve maximum CP -TSR curve.
Higher wind speed regionAs the wind speed increases, the power generated
by the wind turbine also increases. Once the maximumrating of the power converter is reached, the pitch angleis increased (directed to feather) to shed theaerodynamic power. As the pitch angle is increased, thewind turbine operates at lower efficiency. Figure 2shows that the whole CP -TSR curve is shifted down-ward when the pitch angle is increased. With thiscapability, the input mechanical power driving thegenerator is controllable by the pitch control. Assumingthe pitch control can be done instan-taneously, theacceleration and deceleration can be made zero and thespeed can be kept constant by controlling the Pcaptured tobe exactly equal to Pelectric. A higher pitch ratecapability of a wind turbine can lessen the requirementfor the generator and power converter rating.
Limited pitch rateAs described in the previous sections, the
acceleration and deceleration can be made zero atconstant electric power, provided the pitch can becontrolled very fast. The rotor speed acceleration anddeceleration can be described in the following simpleequation:
� −= dt)T(TJ1
dtdw
electriccapturedm (5)
Figure 7. Power target versus rpm
rpmhi
rpmheadroom = 10% rpmhi

6
The rate of rotor speed is proportional to theinverse of the inertia and difference betweenaerodynamic torque captured (Tcaptured) from the windand the electric torque load (Telectric). The aerodynamictorque is affected by the operating CP and the pitchcontrollability. Figure 7 shows the overall controlstrategy. In the low-to-medium wind speed (OC), thegenerator is controlled in such a way that theaerodynamic torque is operated at CPmax at any rpm. Inthe high wind speed, there are two ways used to reducethe aerodynamic torque captured. The first one is tocontrol the pitch, and the second one is to force thewind turbine to operate at lower CP and lower TSR(stalling mode). The second method is very suitablefor wind turbines that have a limited pitch-ratecapability.
As shown in Figure 7, in the high wind speedregion, there is an rpm, called rpm1. At rpm1, the pitchis starting to be controlled. At the same time, thegenerator torque is also increased to its maximumcapability Trated. As the difference between Tcaptured andTelectric is positive, the rotor speed continues to increase.In this operation, Telectric = Trated which forces the windturbine to operate in the stall mode, and the pitch iscontrolled to reduce operating CP significantly. It isexpected that the rotor speed will eventually becontrollable before the rotor speed reaches its upperlimit at rpmhi. Some hysteresis is included to avoidchattering when the mode changes from one mode toanother. The power profile shown in Figure 7 can bemodified. For example, from point C to point B, theprofile can be modified to form a slope rather than ajump as shown in Figure 7. The range of rpm betweenrpm1 and rpmhi is called rpm headroom. If the pitchrate can be controlled very quickly, the rpm headroomcan be made small or negligible, thus rpm1 can be madeequal to rpmhi. On the other hand, if the pitch rate isvery slow, the rpm headroom must be made adequate tolimit the rotor speed of the wind turbine.
IV. ANALYSIS AND DISCUSSIONS
We implemented the simulation of controlstrategy. The rotor rpm limit rpm1 (point C) is chosento be 34.8 rpm. The maximum power is chosen to be750 kW. The rpm headroom is chosen to be between10% to 20% of the maximum rpm. The pitch rate ischosen to be 4/0.7 degree/s. That is, the pitch angle canbe ramped up at 4 degrees per second and it can beramped down at 0.7 degree per second. The wind speedchosen is 14 m/s with a rough-turbulence case. Thehysteresis rpm is chosen to be 2% of the maximum rpm.
In Figure 8, the electrical power (Power), thecaptured aerodynamic power (Pmech), and the rotor rpmare shown on the same graph. The rotor is started atzero rpm and the wind turbine is motored up to cut-inspeed. In this paper, no attempt was made to smooththe starting transient, thus the starting transient isbeyond the scope of discussion. Consider the time ofobservation after the starting transients at about10 seconds and above. As the wind speed increases, thecaptured power also increases. As the aero power ishigher than the electrical power, the rotor accelerationis positive and the rotor speed increases. The controllerfollows the CPmax operating mode based on Equation 4(i.e., the electric power is controlled to be the cubefunction of the rotor rpm). When the rotor rpm reachesthe rpm headroom area (about 8% under maximum rpm,rpmhi), the demanded generator torque is raised to ratedtorque. The electrical power reflects the constant ratedtorque operation. Meanwhile, the blade pitch is alsoincreased at the rate of 4 degrees per second. Theaerodynamic power Pmech is still higher than the electricpower, and the rotor rpm increases. At one point thePmech is lower than the Power, which results in the rotor
rpm starting to decline. The blade pitch is controlled todecrease at about 0.7 degree per second. When the rotorpower reaches the boundary of rpm headroom (about12% under rpmhi) at about 28 seconds, the Power isreturned to CPmax operating mode. The wind speed thenpicks up, and the Pmech increases above Power. Therotor rpm once again increases entering the rpmheadroom region at about 37 seconds, and the sameprocedure is followed.
s
Rotor rpm
Pmech
Power

7
Note that the rotor rpm stays within the rpmheadroom. This rpm headroom should be adjustedaccording to the capability of the wind turbine tocontrol the pitch. With a high pitch-rate capability, theheadroom can be made minimal.
Figure 9 shows another run with different settings.In this case, the rpm headroom is minimized to zero.The rpm1 is made equal to rpmhi, and the hysteresis iseliminated. The pitch rate is changed to 8 degrees persecond to ramp up and 8 degrees per second to rampdown. The result shows that the rotor speed is regulatedvery smoothly. The pitch angle shows a very activemovement to control the rotor speed constant in thehigh wind speed region. The pitch angle follows thetrend of the wind speed. As the wind speed increases,the average pitch angle also increases. Similarly, whenthe wind speed decreases, the average pitch angle alsodecreases.
In Figure 10, the electrical power Pmech and thepower coefficient CP are shown. It is shown that thepower and the average Pmech track each other veryclosely as the wind speed changes. Althoughinstantaneous, the difference between the Pmech and the
power is not very smooth. The fact that the inertia ofthe turbine blades is very high is reflected by thesmooth variation of the rotor speed. The powercoefficient CP shows that in the high wind speed region,the power captured can be limited by the pitch control,which will make the wind turbine operate at a very lowefficiency.
The operation will be reset to CPmax operatingmode when the rotor speed goes under the rpmhi. In thiscase, as the rpm decreases, the pitch angle alsodecreases until it reaches the optimum setting at whichthe pitch angle is kept constant. Note that the electricalpower is controlled to follow Equation 4 all the time.Since the rpm headroom is eliminated, there is no needto apply Trated within rpm headroom. As a result, theoverall energy capture will be optimized throughout therpm range. All of this is accomplished due to the factthat the pitch mechanism is capable of controlling therotor rpm very fast. The overall advantage is that theenergy captured from the wind can be maximized.
Figure 9. Wind speed, rpm, and pitch for wind turbine operation at higher pitch-rate capability
Figure 10. Power, aero-power , and power coefficient forwind turbine operation at higher pitch-rate capability

8
V. CONCLUSIONS
We simulated a pitch-controlled, variable-speedwind turbine operating in turbulent winds. Wedescribed the philosophy behind the control strategy.Slow and fast pitch rates were investigated, and theirimpacts were shown on the operating characteristics ofthe wind turbine. Considering our results, we draw thefollowing conclusions:
• Electrical power can be controlled instantaneouslyat any rpm. The only upper limit is the rating of thepower converter and generator.
• In the lower wind speed region, maximum CPoperating mode is adapted. The pitch angle is keptat its optimum operation. The average CP is shownto be maximum as the wind speed varies.
• In the higher wind speed region, the rotor speedmust be controlled to avoid rotor speed increasesbeyond a controllable limit. The rpm headroom isdefined for a low pitch-rate wind turbine.
• The acceleration and deceleration can be controlledif the difference between the electrical power andaerodynamic power can be adjusted. Thecapability of controlling the pitch angle is veryimportant to shed the aerodynamic power very fast.With a fast pitch rate, the rpm headroom can beminimized, and the energy captured can beoptimized. With a slow pitch rate, the rpmheadroom must be substantial. Additionalelectrical load may have to be introduced to helpslow down or to stall the wind turbine. In this case,setting the electrical torque at its rated torque canbe used to stall the wind turbine while the pitchangle is controlled sluggishly.
• The smoothness of rotor-speed variation is affectedby the smoothness of the power difference betweenelectrical power and the aerodynamic power andthe size of the rotor inertia.
ACKNOWLEDGMENTS
We wish to thank Neil Kelley and Marshall Buhl,Jr. for providing the wind data sets used in this work,and members of the Power Systems group at NREL�sNational Wind Technology Center for all the helpprovided during the development of this project. Theauthors also wish to thank the Zond engineering team,in particular Amir Mikhail and Craig Christenson, forallowing our control algorithm to be tested on theirplatform.
We wish to acknowledge our management at NREL andthe U.S. Department of Energy (DOE) for encouragingus and approving the time and tools we needed for thisproject. DOE supported this work under contractnumber DE-AC36-98-GO10337.
REFERENCES
[1] Muljadi, E.; Butterfield C.P.; Buhl, Jr., M. L.�Effect of Turbulence on Power Generation forVariable Speed Wind Turbines,� Presented at theASME Wind Energy Symposium, Houston, TX,Jan. 6-9, 1997.
[2] Torrey, D.; Childs S.; de Haan, S. �A Variable-Speed Wind Turbine Based on a Direct-Drive Variable-Reluctance Generator,� Proceedings of Windpower �94,MN, May 10-13, 1994, Washington D.C.: AmericanWind Energy Association; pp. 513�522.
[3] Fardoun, A.A.; Fuchs, E.F.; Carlin, P.W. �AVariable Speed, Direct Drive Transmission WindPower Plant,� Proceedings of Windpower �93, SanFrancisco, CA, July 12�16, 1993, Washington, D.C.:American Wind Energy Association; pp. 134�141.
[4] Connor B.; Leithead, W.E. �Relationship of theControllability of Power/Torque Fluctuations in theDrive-Train to the Wind Turbine Configuration.�Proceedings of the 1993 Wind Energy Conversion,Fifteenth BWEA Wind Energy Conference, October 6�8, 1993, York, United Kingdom, British Wind EnergyAssociation; pp. 213�219.