
Pathological Sit-To-Stand Models for Control of a Rehabilitation Robotic Device
9
Proceedings of the 2007 IEEE 10th International Conference on Rehabilitation Robotics, June 12-15, Noordwijk, The Netherlands Pathological Sit-To-Stand Models for Control of a Rehabilitation Robotic Device Ludovic Saint-Bauzel, Viviane Pasqui, Bruno Gas and Jean-Luc Zarader * Abstract The aim of the work presented in this paper is to re- alise the model for the control of a robotic interface for equilibrium assistance during sit-to-stand transfer of patients affected by posture pathology as Multiple Sclerosis and Post-Fall Syndrome. Interactive robotic devices designed as human-centered robotic devices, can give more comfortable and more ef- ficient solutions than traditional technical devices. One supposes the need of a virtual model of the pathology. This model, called "observer", aims at being used in the smoothing control part of this assisting device. A useful property of this observer should be a postural prediction ability. This article presents a study of different solutions a Neural Trajectory Generator(NTG), a Linear Pre- dictor(LP) and a Neural Predictive Observer (NPO). Records used for the learning have been done from healthy people that stand up normally and quickly. Some tests have also been done with patients affected by cerebellar syndrome Multiple Sclerosis disease. The presented experimental results show the good ac- curacy of these approaches whatever the speed of the movement. 1. Introduction This work concerns the control of robotic devices interacting with patients during rehabilitation training. It aims at helping people affected by cerebellar syn- drome in Multiple Sclerosis. That syndrome undergo tremors in many movements that can cause hazardous imbalance during STS transfer. Motion injuring dis- eases are the main reason why developing robotic de- vices (fig. 2) that can help people to stand-up and *Universite Pierre et Marie Curie-Paris6, FRE-2507 Institut des Systemes Intelligents et Robotique (ISIR), Fontenay-aux-Roses, F- 92265 France; [email protected], [email protected], [email protected], [email protected] walk seems very important. In addition, developping solutions dealing with that pathology with a control of imbalance[2] seems worthy. The interaction between the assisting device and the patient can be considered as a control loop (cf. fig. 1). In this case, the patient is assimilated to an unknown system and the robot to an actuator regulating disorders. The stabilisation is obtained comparing the patient state evaluated by an observer with a physiological joint trajectory genera- tion. Our aim is to improve the human-robot interac- tion. Two way of modeling will be studied in this pa- per. First, we will discuss the use of neural solution to generate trajectory. Then we will study the proper- ties of two predictive observers. In trajectory genera- tion, biomechanical approach comprise a definition of a biomechanical model. Actuating that model is done ac- cording to a control, some criteria and an optimisation process. [18] develop linear properties that governs hip and knee action in standing movement. Many works are done with a minimum energy investigation and muscle models [7]. [28] present the very complete set of criteria optimised with an advanced optimisation process based on Sequential Quadratic Problem (SQP), so it will be interesting to compare our work with this approach. As far as this method will be used as a comparison point we will give more details in 2.2.2. Therefore Functional Electrical Stimulation (FES) Support research field is dealing with these problems close to the way we want. People working in this do- main tries to model human motion in order to have a standard trajectory. Then that trajectory is mapped to obtain an electrical stimulation of the human body. Based on biomechanical model they already develop fi- nite state controller [8] , linear Proportional, Integra- tor and Derivative (PID) and nonlinear fuzzy controllers controlling the knee joint angle have also been proposed [9],[10]. Other have developed a complete non-linear mapping [12] based on Gaussian Process optimisations and provide the center of mass coordinate. All these methods are interesting but there is no approach that evaluate the asset of a predictive observation. That is 1-4244-1 320-6/07/$25.00 (c)2007 IEEE 347
-
Upload
sorbonne-fr -
Category
Documents
-
view
1 -
download
0
Transcript of Pathological Sit-To-Stand Models for Control of a Rehabilitation Robotic Device

Proceedings of the 2007 IEEE 10th International Conference on Rehabilitation Robotics, June 12-15, Noordwijk, The Netherlands
Pathological Sit-To-Stand Models for Control of aRehabilitation Robotic Device
Ludovic Saint-Bauzel, Viviane Pasqui, Bruno Gas and Jean-Luc Zarader *
Abstract
The aim of the work presented in this paper is to re-alise the model for the control of a robotic interfacefor equilibrium assistance during sit-to-stand transferof patients affected by posture pathology as MultipleSclerosis and Post-Fall Syndrome.Interactive robotic devices designed as human-centeredrobotic devices, can give more comfortable and more ef-ficient solutions than traditional technical devices. Onesupposes the need of a virtual model of the pathology.This model, called "observer", aims at being used inthe smoothing control part of this assisting device. Auseful property of this observer should be a posturalprediction ability.This article presents a study of different solutionsa Neural Trajectory Generator(NTG), a Linear Pre-dictor(LP) and a Neural Predictive Observer (NPO).Records used for the learning have been done fromhealthy people that stand up normally and quickly.Some tests have also been done with patients affectedby cerebellar syndrome Multiple Sclerosis disease.The presented experimental results show the good ac-curacy of these approaches whatever the speed of themovement.
1. Introduction
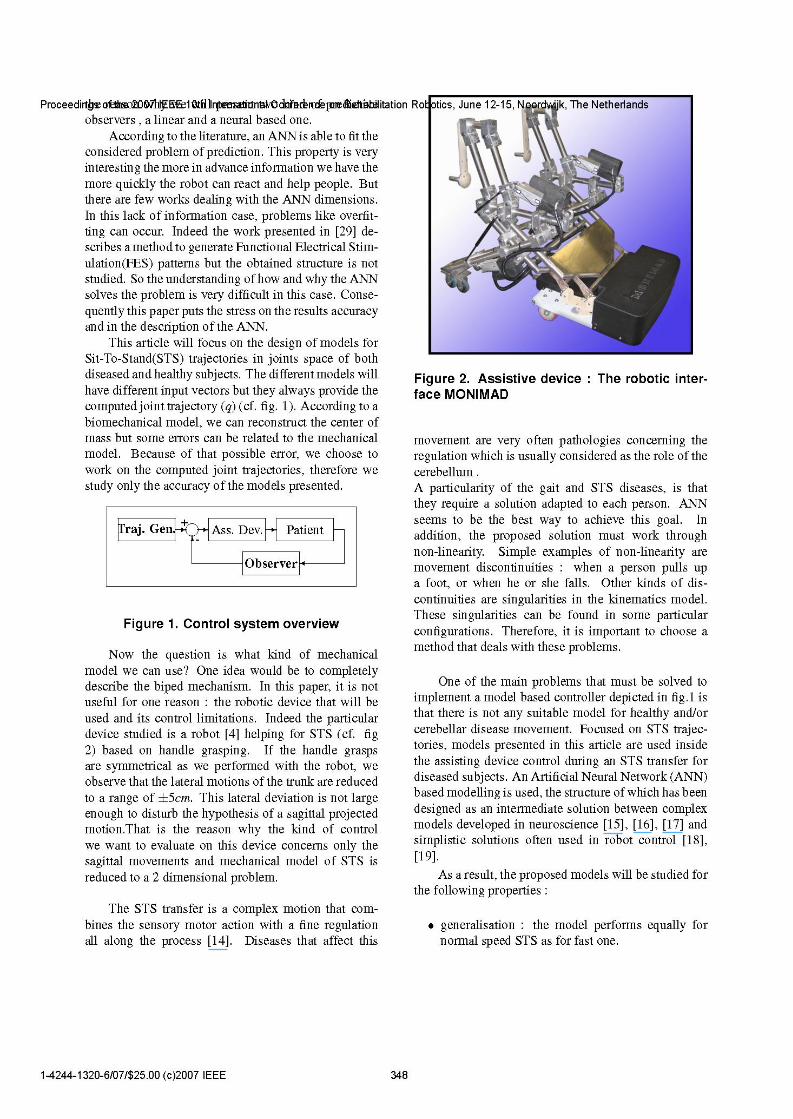
This work concerns the control of robotic devicesinteracting with patients during rehabilitation training.It aims at helping people affected by cerebellar syn-drome in Multiple Sclerosis. That syndrome undergotremors in many movements that can cause hazardousimbalance during STS transfer. Motion injuring dis-eases are the main reason why developing robotic de-vices (fig. 2) that can help people to stand-up and
*Universite Pierre et Marie Curie-Paris6, FRE-2507 Institut desSystemes Intelligents et Robotique (ISIR), Fontenay-aux-Roses, F-92265 France; [email protected],[email protected],[email protected], [email protected]
walk seems very important. In addition, developpingsolutions dealing with that pathology with a control ofimbalance[2] seems worthy. The interaction betweenthe assisting device and the patient can be consideredas a control loop (cf. fig. 1). In this case, the patientis assimilated to an unknown system and the robot toan actuator regulating disorders. The stabilisation isobtained comparing the patient state evaluated by anobserver with a physiological joint trajectory genera-tion. Our aim is to improve the human-robot interac-tion. Two way of modeling will be studied in this pa-per. First, we will discuss the use of neural solutionto generate trajectory. Then we will study the proper-ties of two predictive observers. In trajectory genera-tion, biomechanical approach comprise a definition of abiomechanical model. Actuating that model is done ac-cording to a control, some criteria and an optimisationprocess. [18] develop linear properties that governs hipand knee action in standing movement. Many works aredone with a minimum energy investigation and musclemodels [7]. [28] present the very complete set of criteriaoptimised with an advanced optimisation process basedon Sequential Quadratic Problem (SQP), so it will beinteresting to compare our work with this approach. Asfar as this method will be used as a comparison pointwe will give more details in 2.2.2.
Therefore Functional Electrical Stimulation (FES)Support research field is dealing with these problemsclose to the way we want. People working in this do-main tries to model human motion in order to havea standard trajectory. Then that trajectory is mappedto obtain an electrical stimulation of the human body.Based on biomechanical model they already develop fi-nite state controller [8] , linear Proportional, Integra-tor and Derivative (PID) and nonlinear fuzzy controllerscontrolling the knee joint angle have also been proposed[9],[10]. Other have developed a complete non-linearmapping [12] based on Gaussian Process optimisationsand provide the center of mass coordinate. All thesemethods are interesting but there is no approach thatevaluate the asset of a predictive observation. That is
1-4244-1 320-6/07/$25.00 (c)2007 IEEE 347
Proceedirt4at1 @Xtnoideiletalion Rotobservers , a linear and a neural based one.
According to the literature, an ANN is able to fit theconsidered problem of prediction. This property is veryinteresting the more in advance information we have themore quickly the robot can react and help people. Butthere are few works dealing with the ANN dimensions.In this lack of information case, problems like overfit-ting can occur. Indeed the work presented in [29] de-scribes a method to generate Functional Electrical Stim-ulation(FES) patterns but the obtained structure is notstudied. So the understanding of how and why the ANNsolves the problem is very difficult in this case. Conse-quently this paper puts the stress on the results accuracyand in the description of the ANN.
This article will focus on the design of models forSit-To-Stand(STS) trajectories in joints space of bothdiseased and healthy subjects. The different models willhave different input vectors but they always provide thecomputed joint trajectory (q) (cf. fig. 1). According to abiomechanical model, we can reconstruct the center ofmass but some errors can be related to the mechanicalmodel. Because of that possible error, we choose towork on the computed joint trajectories, therefore westudy only the accuracy of the models presented.
Figure 1. Control system overview
Now the question is what kind of mechanicalmodel we can use? One idea would be to completelydescribe the biped mechanism. In this paper, it is notuseful for one reason: the robotic device that will beused and its control limitations. Indeed the particulardevice studied is a robot [4] helping for STS (cf. fig2) based on handle grasping. If the handle graspsare symmetrical as we performed with the robot, weobserve that the lateral motions of the trunk are reducedto a range of ±5cm. This lateral deviation is not largeenough to disturb the hypothesis of a sagittal projectedmotion.That is the reason why the kind of controlwe want to evaluate on this device concerns only thesagittal movements and mechanical model of STS isreduced to a 2 dimensional problem.
The STS transfer is a complex motion that com-bines the sensory motor action with a fine regulationall along the process [14]. Diseases that affect this
Figure 2. Assistive device: The robotic inter-face MONIMAD
movement are very often pathologies concerning theregulation which is usually considered as the role of thecerebellum .A particularity of the gait and STS diseases, is thatthey require a solution adapted to each person. ANNseems to be the best way to achieve this goal. Inaddition, the proposed solution must work throughnon-linearity. Simple examples of non-linearity aremovement discontinuities: when a person pulls upa foot, or when he or she falls. Other kinds of dis-continuities are singularities in the kinematics model.These singularities can be found in some particularconfigurations. Therefore, it is important to choose amethod that deals with these problems.
One of the main problems that must be solved toimplement a model based controller depicted in fig. 1 isthat there is not any suitable model for healthy and/orcerebellar disease movement. Focused on STS trajec-tories, models presented in this article are used insidethe assisting device control during an STS transfer fordiseased subjects. An Artificial Neural Network (ANN)based modelling is used, the structure of which has beendesigned as an intermediate solution between complexmodels developed in neuroscience [15], [16], [17] andsimplistic solutions often used in robot control [18],[19].
As a result, the proposed models will be studied forthe following properties:
* generalisation: the model performs equally fornormal speed STS as for fast one.
1-4244-1 320-6/07/$25.00 (c)2007 IEEE 348
Proceedings.DfApecQdlhEiE5 1othdnerionat MfbwrA twRfiabilitation obdhixtIcx uau(D) rfiwJkl,yThn ftmh1imruunction (f)individual disease expression.
* disease ability: the best solution will be tested ondiseased trajectory.
* non-linearity ability: the ability of this method towork through some kind of non-linearity.
In section 2, proposed solution will be presented. Thatsection will also be the place to remind some propertiesof a classical ANN. The control will be presented inthis part in order to replace the use of the models intheir context. Then the section 3 will present differenttools used to perform the results presented in section 4.And finally we will conclude and give some overviewsfollowing this work in section 6.
2. Method
As far as a main part of the solutions presented are
based on ANN, let begin with a small description of thiskind of software structure.
2.1. Artificial Neural Networks
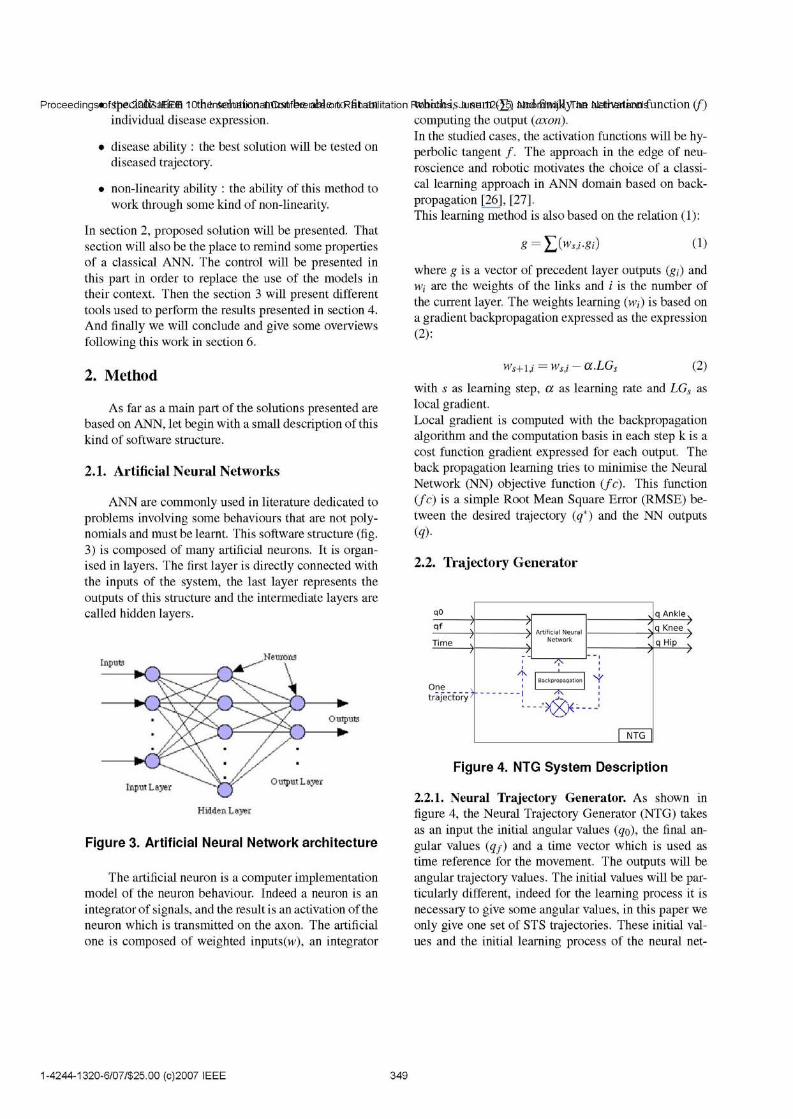
ANN are commonly used in literature dedicated toproblems involving some behaviours that are not poly-nomials and must be learnt. This software structure (fig.3) is composed of many artificial neurons. It is organ-
ised in layers. The first layer is directly connected withthe inputs of the system, the last layer represents theoutputs of this structure and the intermediate layers are
called hidden layers.
Figure 3. Artificial Neural Network architecture
The artificial neuron is a computer implementationmodel of the neuron behaviour. Indeed a neuron is anintegrator of signals, and the result is an activation of theneuron which is transmitted on the axon. The artificialone is composed of weighted inputs(w), an integrator
computing the output (axon).In the studied cases, the activation functions will be hy-perbolic tangent f. The approach in the edge of neu-roscience and robotic motivates the choice of a classi-cal learning approach in ANN domain based on back-propagation [26], [27].This learning method is also based on the relation (1):
g = L(W5i-gi) (1)
where g is a vector of precedent layer outputs (gi) andwi are the weights of the links and i is the number ofthe current layer. The weights learning (wi) is based ona gradient backpropagation expressed as the expression(2):
w,+5,i = w,i -ca.LG, (2)with s as learning step, a as learning rate and LGs aslocal gradient.Local gradient is computed with the backpropagationalgorithm and the computation basis in each step k is acost function gradient expressed for each output. Theback propagation learning tries to minimise the NeuralNetwork (NN) objective function (fc). This function(fc) is a simple Root Mean Square Error (RMSE) be-tween the desired trajectory (q*) and the NN outputs(q).
2.2. Trajectory Generator
Onetrajectory- /
F~~N
Figure 4. NTG System Description
2.2.1. Neural Trajectory Generator. As shown infigure 4, the Neural Trajectory Generator (NTG) takesas an input the initial angular values (qo), the final an-gular values (qf) and a time vector which is used astime reference for the movement. The outputs will beangular trajectory values. The initial values will be par-ticularly different, indeed for the learning process it isnecessary to give some angular values, in this paper weonly give one set of STS trajectories. These initial val-ues and the initial learning process of the neural net-
1-4244-1 320-6/07/$25.00 (c)2007 IEEE
Backpropagation
^1
349

Proceedirigs&df t 2qb dEaRdttvitvr-tinhtishedin(erence on Rehabilitation Robotics,Following an evaluation of different NN sizes, the bestNN obtained was composed by 5 hidden cells. This NNis structured as one layer perceptron with hyperbolictangent as its activation functions.
2.2.2. Polynomial optimisation(KUZE). In order tocompare our results, a solution found in literature hasbeen implemented. This is polynomial method basedon non-linear optimisation [28]. This method is pro-posed for trajectory generation. That solution takes asinput the initial angular values (qo), the final angularvalues (qf) and a time vector which is used as time Freference for the movement. It returns optimal quin-tic B-splines description of the trajectory, this optimal-ity is computed according to a cost function (3) based input inon the dynamical model. These B-splines are then con- are wit'verted to time based values which will be the output of angular,the system. Indeed, the outputs are vectors that has the angularsame size than the time vector and which describes the So, thetrajectories of the ankle, the knee and the hip . In or- state eva
der to initialise the dynamical model, it is necessary to 2.3.2. Lgive some information about masses and dimensions. there isCost Functioni:
C =-A (C1 + T2.C2 + C3).dtM t:
Minimum Effort:
Cl = T E,.+XT.Ej
(3)
ment. Sto have,extrapolfine the(6):
Figure 5. NPO System Description
one STS trajectory learning, only 3 new values,n. Others values are obtained from the last in-th d. This NN provides in each step the threevalues in forward time: q*(k+ 1).angular values prediction is used in the posturalaluation.
,inear Predictor (LP). As far as we know,no predictive approach for human STS move-o we describe a Linear Predictor (LP) in ordera comparison point. This LP is a simple linearlation. The aim of a linear extrapolation is to de-both parameters of the line, a and b in relation
Yk = a.k + b(4)
Minimum Jerk:
C2 = tTDt+Ti .D (5)
(6)This is obtained with a pseudo-inverse (noted with sym-bol +) of the last parameters of the BW as shown inexpressions (7):
where T = tF ... tO, X represents the GroundForce Vector, E and D are weight diagonal ma-trix
2.3. Predictive Observer
2.3.1. Neural Predictive Observer. As shown in fig-ure 5, the only difference between inputs and outputs isthe time reference. Indeed the outputs are angular for-ward values of the inputs. For the learning process thedatabase is a set of angular values of one kind of STS:normal and fast.
The NPO can be represented as in figure 5, q(k) isa vector composed of the three angular values (ankle,hip and knee values) at instant k and boxes named d aredelay functions.The NN inputs size is q(k) size multiplied by the slid-ing window size: 3xBW (Backward Window is a scalarvalue defining the time sliding window size). For each
Uk = [k i]TDk = [Uk-BW ... Uk]
Yk = [Yk-BW ... Ykl
Dk+ = DT.(Dk.D T)AB = Yk.Dk+ = [a b]
k Yk+ 1 = AB.Uk+ 1
(7)
2.3.3. Control description. As far as we know, thethree models presented here have not already been pre-sented in the control of assisting devices for the STSmovement. We also chose these modelling approachesto show different ways that can be used in model-basedcontrol. A good trajectory generator is able to define ajoint trajectory set that is similar to the real action andin this case we can look at the next trajectory values tochoose the best control action. In one way, the trajec-tory generator is the ideal predictive system. We thendefine two kinds of predictors, one neural based and an-other which is a simple linear extrapolation. Accordingto our control solution in figure 6, we can see that the
1-4244-1 320-6/07/$25.00 (c)2007 IEEE 350
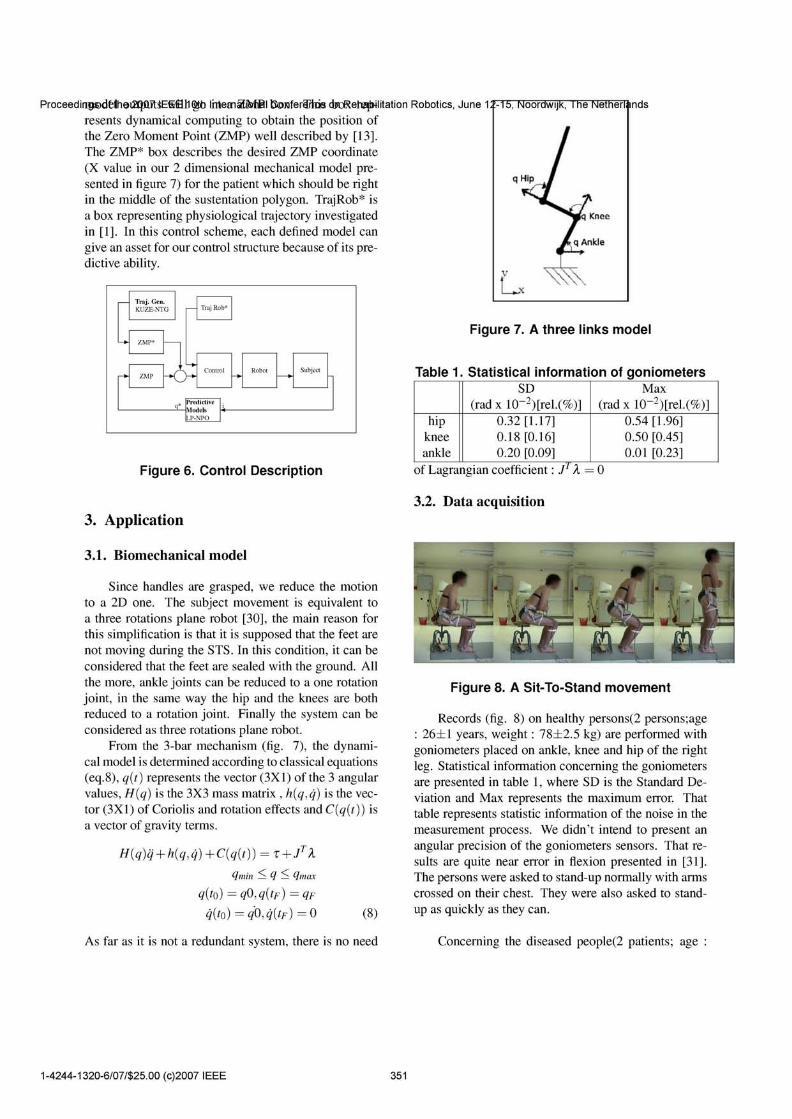
ProceedirqvdftheU2ATEtEll1 h lienemaMi' I3llEferdrds dxReth41itation Robotics, June 1resents dynamical computing to obtain the position ofthe Zero Moment Point (ZMP) well described by [13].The ZMP* box describes the desired ZMP coordinate(X value in our 2 dimensional mechanical model pre-sented in figure 7) for the patient which should be rightin the middle of the sustentation polygon. TrajRob* isa box representing physiological trajectory investigatedin [1]. In this control scheme, each defined model cangive an asset for our control structure because of its pre-dictive ability.
Figure 6. Control Description
-15,Noordwsjk,he Nethnds
q Hip
IKnee
LYFigure 7. A three links model
Table 1. Statistical information of goniometersSD Max
(rad x 10-2)[rel.(%)] (rad x 10-2)[rel.(%)]hip 0.32 [1.17] 0.54 [1.96]knee 0.18 [0.16] 0.50 [0.45]ankle 0.20 [0.09] 0.01 [0.23]
of Lagrangian coefficient: JTX = 0
3.2. Data acquisition3. Application
3.1. Biomechanical model
Since handles are grasped, we reduce the motionto a 2D one. The subject movement is equivalent toa three rotations plane robot [30], the main reason forthis simplification is that it is supposed that the feet arenot moving during the STS. In this condition, it can beconsidered that the feet are sealed with the ground. Allthe more, ankle joints can be reduced to a one rotationjoint, in the same way the hip and the knees are bothreduced to a rotation joint. Finally the system can beconsidered as three rotations plane robot.
From the 3-bar mechanism (fig. 7), the dynami-cal model is determined according to classical equations(eq.8), q(t) represents the vector (3X1) of the 3 angularvalues, H(q) is the 3X3 mass matrix, h(q, 4) is the vec-tor (3X1) of Coriolis and rotation effects and C(q(t)) isa vector of gravity terms.
H(q)q + h(q, 4) +C(q(t)) =+JT2Lqmin < q < qmax
q(to) = qO,q(tF) = qF
4(to) = qO,4 (tF) = 0 (8)
As far as it is not a redundant system, there is no need
Figure 8. A Sit-To-Stand movement
Records (fig. 8) on healthy persons(2 persons;age26±1 years, weight: 78±2.5 kg) are performed with
goniometers placed on ankle, knee and hip of the rightleg. Statistical information concerning the goniometersare presented in table 1, where SD is the Standard De-viation and Max represents the maximum error. Thattable represents statistic information of the noise in themeasurement process. We didn't intend to present anangular precision of the goniometers sensors. That re-sults are quite near error in flexion presented in [31].The persons were asked to stand-up normally with armscrossed on their chest. They were also asked to stand-up as quickly as they can.
Concerning the diseased people(2 patients; age
1-4244-1 320-6/07/$25.00 (c)2007 IEEE 351

ProceedirRbIfecT tE4q.5Ot4Jfit&g]tio,edbn bc r l itation Robotics June 12-15, Noordwijk The Netherlandswith a motion capture system developed by Motion Table 2. Comparison between polynomial opti-Analysis with a sampling frequency of 100 Hz. Five misation and neural network approachretroreflexive markers (diameter: 0.01 m) were placed NTG (rel) KUZE(rel)on the subject's right side: on the head of the fifth A 0.0389 (1.78) 0.0028 (0.81)metatarsal, on the lateral malleolus, on the femur lateral B 0.0207 (0.95) 0.0376 (1.72)epicondyle, on the great trochanter and on the acromion C 0.0160 (0.73) 0.0150 (0.69)process. All these markers were considered to be in the D 0.0159 (0.73) 0.0100 (0.46)same sagittal plane. So a geometrical model is used to w N sner networ with oeinlyreconstruct the angular values. This reconstruction cancause some discontinuities, so we have to be aware of composed of 5 cells.
these problems when interpreting the results.
3.3. Criteria
All along section 4 which deals with the results,two main criteria will be used. The first one is a classi-cal Root Mean Square Error (RMSE).
We also present relative values (rel) are computedwith the relation (9), they are defined as the percent oferror (err) which is the RMSE value versus the maxi-mum angular variation value.
rel100.err
max(abs(max(q) -min(q)))
data. Then, a cross test will be performed in order to de-termine if a network which learns a normal (resp. fast)STS trajectory can observe a fast (resp. normal) move-ment.Indeed this solution should be able to identify an STSfor every speed.
(9) 4. Results
3.4. Properties
In this paper, it is considered that if the observerkeeps a good accuracy in normal speed and in fastspeed, then it is able to keep it all along the speeds be-tween those two extrema. It has been decided to look atthe speed of the movements as a proof of generalisationof this approach.In this paper, it is considered that if the observer doesnot keep a good accuracy between two persons STS, themodel shows a good specialisation ability. Using NPOor NTG should be interesting only if this method maybe specialised for one person and if it can have a goodaccuracy in all the situations used.
3.5. Learning process
For these tests, learning for NPO is done with allthe data from one person at one given speed from which2 rising are withdrawn one for validation and the otherfor evaluation. The database is composed of movementsfrom one person in normal speed (9 records) and in fastspeed (11 records).For NTG, the learning database is composed of onlyone STS motion, because we try to be similar with theKUZE, the method that we used for comparison. First,the results will be studied in the same speed field of
4.1. Trajectory Generation
Some preliminary evaluation tests have been doneon a small database of STS coming from four differentsubjects (A, B, C, D).These tests may answer the following questions:* "Can a neural observer learn a human movement?"* "Is the non-polynomial property an improvement?"
The comparison is made between the KUZEmethod [28] and the NTG method described below. Ta-ble 2 presents the RMSE of these two methods alongthe STS motions. As far as the learning database is verysmall, which is not the best conditions for NTG, we cansee comparable results.So a neural solution is able to learn a human motionwith almost the same accuracy as a polynomial ap-proach.Figure 9 presents a curve describing how the non-polynomial approach (dashed line called NN) can reacha better accuracy than the polynomial one (above linecalled KUZE).
1-4244-1 320-6/07/$25.00 (c)2007 IEEE 352
2-Proceedings of tlS 2007 IEEE 10th International Conference on Rehabilitation Robotic June 12-15, Noordwijk, The Netherlands q
Kuze 1.5 q-qNN
...... qKnee
1.2 _Real
En
0 >C/ 0.8.5
0.6
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5Time (s)
0.05 0.1 0.15 0.2Time (s)
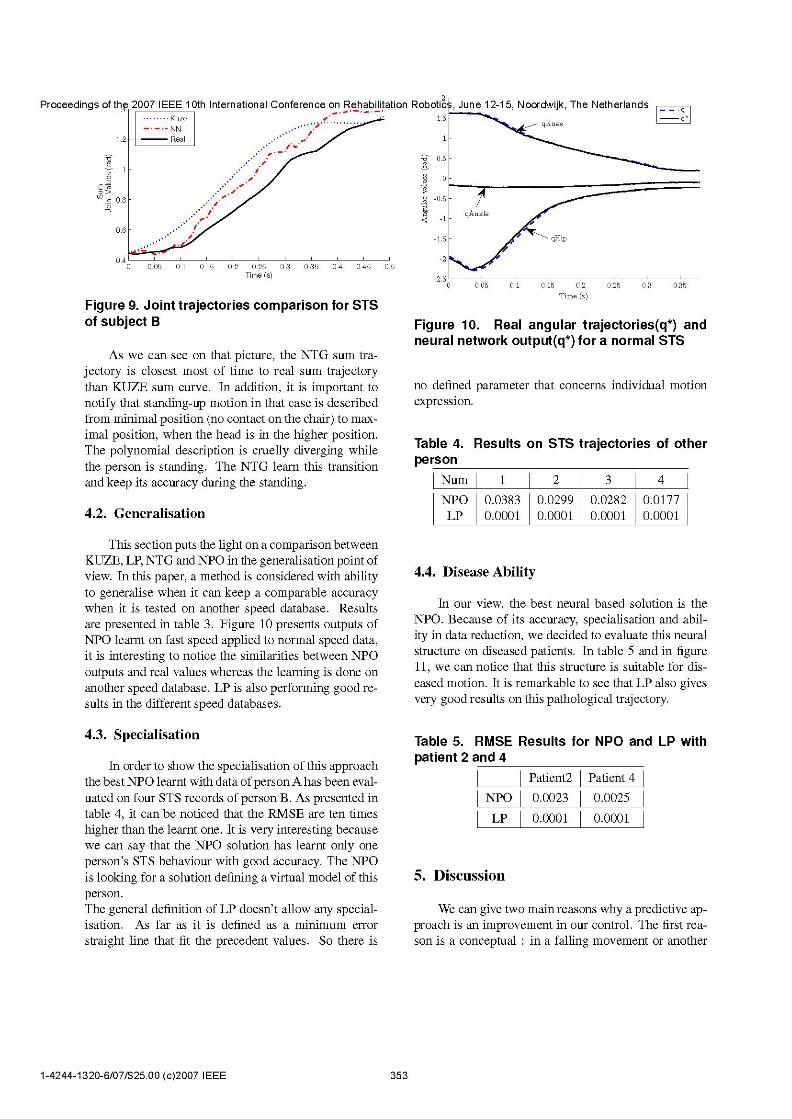
Figure 9. Joint trajectories comparison for STSof subject B
As we can see on that picture, the NTG sum tra-jectory is closest most of time to real sum trajectorythan KUZE sum curve. In addition, it is important tonotify that standing-up motion in that case is describedfrom minimal position (no contact on the chair) to max-imal position, when the head is in the higher position.The polynomial description is cruelly diverging whilethe person is standing. The NTG learn this transitionand keep its accuracy during the standing.
4.2. Generalisation
This section puts the light on a comparison betweenKUZE, LP, NTG and NPO in the generalisation point ofview. In this paper, a method is considered with abilityto generalise when it can keep a comparable accuracywhen it is tested on another speed database. Resultsare presented in table 3. Figure 10 presents outputs ofNPO learnt on fast speed applied to normal speed data,it is interesting to notice the similarities between NPOoutputs and real values whereas the learning is done onanother speed database. LP is also performing good re-sults in the different speed databases.
4.3. Specialisation
In order to show the specialisation of this approachthe best NPO learnt with data of person A has been eval-uated on four STS records of person B. As presented intable 4, it can be noticed that the RMSE are ten timeshigher than the learnt one. It is very interesting becausewe can say that the NPO solution has learnt only oneperson's STS behaviour with good accuracy. The NPOis looking for a solution defining a virtual model of thisperson.The general definition of LP doesn't allow any special-isation. As far as it is defined as a minimum errorstraight line that fit the precedent values. So there is
Figure 10. Real angular trajectories(q*) andneural network output(q*) for a normal STS
no defined parameter that concerns individual motionexpression.
Table 4. Resultsperson
on STS trajectories of other
Num 1 2 3 4
NPO 0.0383 0.0299 0.0282 0.0177LP 0.0001 0.0001 0.0001 0.0001
4.4. Disease Ability
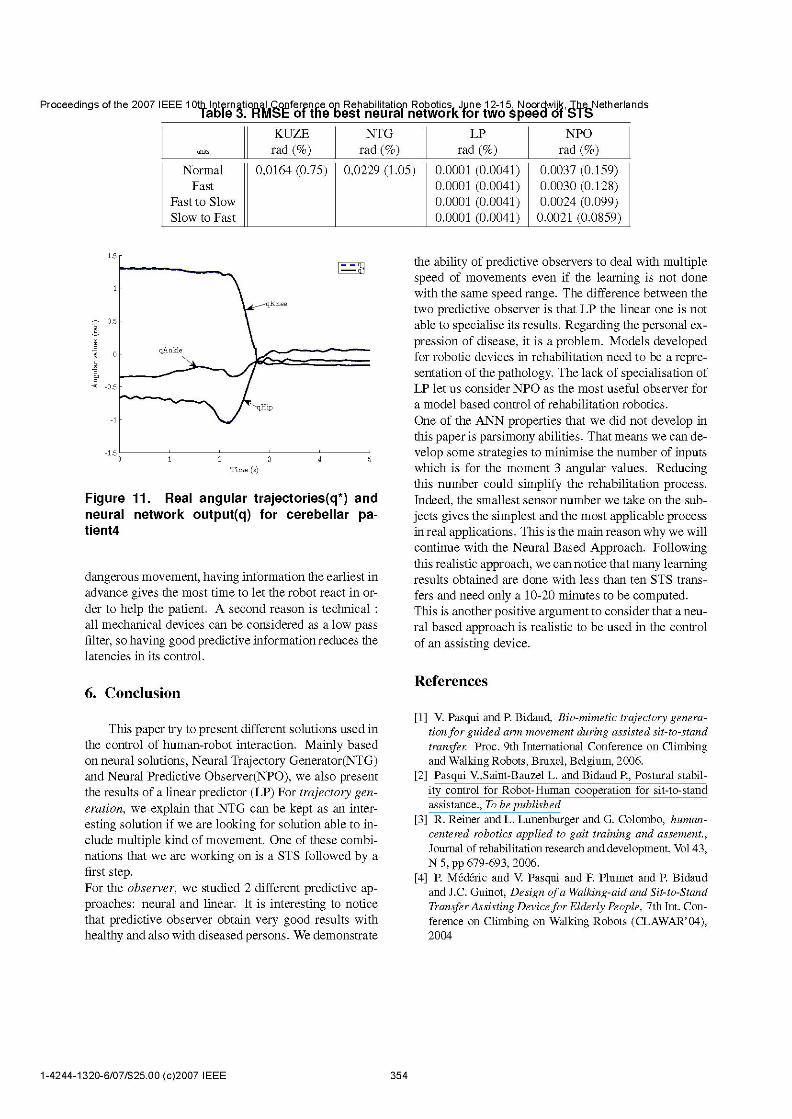
In our view, the best neural based solution is theNPO. Because of its accuracy, specialisation and abil-ity in data reduction, we decided to evaluate this neuralstructure on diseased patients. In table 5 and in figure11, we can notice that this structure is suitable for dis-eased motion. It is remarkable to see that LP also givesvery good results on this pathological trajectory.
Table 5. RMSE Results for NPO and LP withpatient 2 and 4
| Patient2 Patient 4
NPO 0.0023 0.0025LP 0.0001 0.0001
5. Discussion
We can give two main reasons why a predictive ap-proach is an improvement in our control. The first rea-son is a conceptual: in a falling movement or another
1-4244-1 320-6/07/$25.00 (c)2007 IEEE 353
Proceedings of the 2007 IEEE 10EhInternational (gnfer npe on Rehabilitation Robotics June 12-15 Noordwijk The NetherlandsTable 3. R tne best neural network Tor two spee of'STS
KUZE NTG LP NPO| units || rad (%) rad (%) rad (%) rad (%)
Normal 0,0164 (0.75) 0,0229 (1.05) 0.0001 (0.0041) 0.0037 (0.159)Fast 0.0001 (0.0041) 0.0030 (0.128)
Fast to Slow 0.0001 (0.0041) 0.0024 (0.099)Slow to Fast 0.0001 (0.0041) 0.0021 (0.0859)
-1.50 1 2 3 4 5
Time (s)
Figure 11. Real angular trajectories(q*) andneural network output(q) for cerebellar pa-tient4
dangerous movement, having information the earliest inadvance gives the most time to let the robot react in or-der to help the patient. A second reason is technical:all mechanical devices can be considered as a low passfilter, so having good predictive information reduces thelatencies in its control.
6. Conclusion
This paper try to present different solutions used inthe control of human-robot interaction. Mainly basedon neural solutions, Neural Trajectory Generator(NTG)and Neural Predictive Observer(NPO), we also presentthe results of a linear predictor (LP) For trajectory gen-eration, we explain that NTG can be kept as an inter-esting solution if we are looking for solution able to in-clude multiple kind of movement. One of these combi-nations that we are working on is a STS followed by afirst step.For the observer, we studied 2 different predictive ap-proaches: neural and linear. It is interesting to noticethat predictive observer obtain very good results withhealthy and also with diseased persons. We demonstrate
the ability of predictive observers to deal with multiplespeed of movements even if the learning is not donewith the same speed range. The difference between thetwo predictive observer is that LP the linear one is notable to specialise its results. Regarding the personal ex-pression of disease, it is a problem. Models developedfor robotic devices in rehabilitation need to be a repre-sentation of the pathology. The lack of specialisation ofLP let us consider NPO as the most useful observer fora model based control of rehabilitation robotics.One of the ANN properties that we did not develop inthis paper is parsimony abilities. That means we can de-velop some strategies to minimise the number of inputswhich is for the moment 3 angular values. Reducingthis number could simplify the rehabilitation process.Indeed, the smallest sensor number we take on the sub-jects gives the simplest and the most applicable processin real applications. This is the main reason why we willcontinue with the Neural Based Approach. Followingthis realistic approach, we can notice that many learningresults obtained are done with less than ten STS trans-fers and need only a 10-20 minutes to be computed.This is another positive argument to consider that a neu-ral based approach is realistic to be used in the controlof an assisting device.
References
[1] V. Pasqui and P. Bidaud, Bio-mimetic trajectory genera-tion for guided arm movement during assisted sit-to-standtransfer Proc. 9th International Conference on Climbingand Walking Robots, Bruxel, Belgium, 2006.
[2] Pasqui V.,Saint-Bauzel L. and Bidaud P., Postural stabil-ity control for Robot-Human cooperation for sit-to-standassistance., To be published
[3] R. Reiner and L. Lunenburger and G. Colombo, human-centered robotics applied to gait training and assement.,Journal of rehabilitation research and development, Vol 43,N 5, pp 679-693, 2006.
[4] P. M6d6ric and V. Pasqui and F. Plumet and P. Bidaudand J.C. Guinot, Design ofa Walking-aid and Sit-to-StandTransfer Assisting Devicefor Elderly People, 7th Int. Con-ference on Climbing on Walking Robots (CLAWAR'04),2004
1-4244-1 320-6/07/$25.00 (c)2007 IEEE 354
Proceedirq$ dFika1)tI7, D Rob spur 2I2allNcrd\VIjEhfrkelHi&andd Eng 42:87-Robotics and Automation, ISIE'99
[6] Nagai K., Nakanishi I. and Hanafusa H. Assistanceof Self-Transfer of Patients Using a Power-Assisting De-vice, International Conference on Robotics and Automa-tion ,Taipei, 2003
[7] Pandy, M.G.; Garner, B.A.; Anderson, F.C. Optimal Con-trol of Non-ballistic Muscilar Movements: A Constraint-Based Performance Criterion for Rising From a ChairJournal: J. Biomech. Eng., vol. 117, pp. 15-26, 1995
[8] Dolan, M. J.; Andrews, B. J.; Veltink, P. H. Switchingcurve controller for FES-assisted standing up and sittingdown. IEEE Trans. Rehab. Eng., Vol. 6, num. 2, pp.l67-171, 1998
[9] Ewins, D. J.; Taylor, P. N.; Crook, S. E.; Lipczynski, R.T.; Swain, I. D. Practical low cost stand/sit system formid-thoracic paraplegics, J. Biomed. Eng. Vol. 10, pp.184-188, 1998
[10] Davoodi, R.; Andrews, B. J. Computer simulation ofFES standing up in paraplegia: A self-adaptive fuzzy con-troller with reinforcement learning, IEEE Trans. Rehab.Eng., vol. 6, pp. 151-161,1998
[11] Donaldson, N. de N.; Yu, C. H. FES standing: Controlby handle reactions ofleg muscle stimulation (CHRELMS),IEEE Trans. Rehab. Eng., vol. 4, num. 4, pp. 280-284, 1996
[12] Kamnik R, Bajd T., Robot assisted standing-up.,In: Proceedings of the IEEE International Conference onRobotics and Automation, 24-28 April 2000. San Fran-cisco, CA. p. 2907-12.
[13] P. Sardain and G. Bessonnet, Forces Acting on a BipedRobot Center Of Pressure-ZMP IEEE tran Syst., Man.,Cybern. A, vol. 34, sept. 2004
[14] Janssen WGM, Bussmann HBJ and Stam HJ, Determi-nants of the Sit-to-Stand Movement: A Review PhysicalTherapy, 2002
[15] Manto, M., Godaux, E., Jacquy, J., Cerebellar hyperme-tria is larger when the inertial load is artificially increasedAnn. Neurol. 35: 45-52, 1994.
[16] Albus J. S., Theoretical and experimental aspects of acerebellar model. PhD. Dissertation, University of Mary-land, 1972.
[17] Schweighofer N., Arbib M., Dominey P. A model ofthe cerebellum in adaptive-control of saccadic gain 1: themodel and its biological substrate, Biol. Cybernet. 75 (1)19-28, 1996.
[18] Kuo A.D. An optimal control model for analyzing hu-
101, 1995.[19] P. Sardain and G. Bessonnet, Forces Acting on a Biped
Robot Center Of Pressure-ZMP IEEE tran Syst., Man.,Cybern. A, vol. 34, sept. 2004
[20] Martin BJ, Bobrow JE. Minimum effort motionsfor openchain manipulators with task-dependent end effector con-straints. Int. J. Robot. Res., 8:213-24, 1999.
[21] TM Lundin , MD Grabiner,DW Jahnigen. On the as-sumption of bilateral lower extremity joint moment sym-metry during the sit-to-stand task. J Biomech, 28:109-12,1995.
[22] A. Lapedes and R. Farber, Non-linear signal predictionusing neural networks: Prediction and system modeling,Los Alamos National laboratory report, LA-UR-87-2662,1987
[23] B. Gas, J.L. Zarader, C. Chavy (2001), A New Approachto Speech Coding: The Neural Predictive Coding, Journalof Advanced Computational Intelligence, Vol. 4, pp.120-127.
[24] Uno Y, Kawato M, Suzuki R. Formation and controlof optimal trajectory in human multijoint arm movement:minimum torque-change model. Bio Cybem 1989.
[25] M. Kawato, Y. Maeda, Y. Uno and R. Suzuki Trajec-tory formation of arm movement by cascade neural net-work model based on minimum torque-change criterion,Biological Cybernetics - 2004
[26] Hagan, M. T., and M. Menhaj, Training feedforwardnetworks with the Marquardt algorithm, IEEE Transac-tions on Neural Networks, vol. 5, no. 6, pp. 989-993, 1994.
[27] M. T. Hagan, H. B. Demuth, and M. H. Beale, NeuralNetwork Design, Boston, MA: PWS Publishing, 1996.
[28] Kuzelicki, Synthesis of standing-up trajectories usingdynamic optimization, gait and posture,2005
[29] Kamnick, Nonlinear Modeling of FES-SupportedStanding-Up in Paraplegia for Selection of Feedback Sen-sors DCS Tech Report, 2005
[30] G. Khang and F. E. Zajac, Paraplegic standing con-trolled by functional neuromuscular stimulation: PartI-Computer model and control-system design. Part II-Computer simulation studies, IEEE Trans. Biomed. Eng.,vol. 36, pp. 873-894, 1989.
[31] Shiratsu, Angela; Coury, H.J.C.G. Reliability and ac-curacy of different sensors of a fiexible electrogoniometerClinical Biomechanics, vol. 18, pp. 682-684, 2003
1-4244-1 320-6/07/$25.00 (c)2007 IEEE 355




















