
Development of a piezo-actuated micro-teleoperation system for cell manipulation
Upload
independentCategory
view
1download
0
Nonlinear DynDOI 10.1007/s11071-014-1589-5
ORIGINAL PAPER
Optimal synchronization of teleoperation systems via cuckoooptimization algorithm
H. Shokri-Ghaleh · A. Alfi
Received: 20 July 2013 / Accepted: 7 July 2014© Springer Science+Business Media Dordrecht 2014
Abstract The main goal of controller design in bilat-eral teleoperation systems is to achieve stability andtransparency in presence of different factors such astime delay in communication channel and modelinguncertainties. The contribution of this paper is design-ing an optimal controller for synchronization of bilat-eral teleoperation systems with the objectives of reduc-ing the factors. This requires optimizing a set of para-meters of the so-called synchronization control law.To this reason, a novel meta-heuristic algorithm namelycuckoo optimization (CO) algorithm was employed.Comparative simulations are performed to demonstratethe feasibility of the proposed control technique. Theresults indicate that CO is a powerful search and opti-mization technique that may yield better solutions tothe problem in hand than those obtained using otheralgorithms including biogeography-based optimiza-tion, imperialist competitive and artificial bee colony.
Keywords Bilateral control · Transparency ·Stability · Optimization · Cuckoo optimizationalgorithm
H. Shokri-Ghaleh · A. Alfi (B)Faculty of Electrical and Robotic Engineering, ShahroodUniversity of Technology, 36199-95161 Shahrood, Irane-mail: [email protected]
1 Introduction
Time delay is present in a system when a signal origi-nating in one component of a system becomes availablein another component after a lapse time. Time delayis frequently encountered in various engineering sys-tems. Generally, it may degrade the performance of thesystem or even cause instability of the closed-loop sys-tem. For this reason, many efforts have been done onthe problem of controller design for time delay systems[1,2].
One of the active areas of control research intime delay systems is related to teleoperation systems.A bilateral teleoperation is commonly referred as acomplex system composed of five interconnectedcomponents: master and slave robots, human operator,communication channel and task environment. Thesesystems offer humans the ability to extend their ownreach and senses over various length and timescalesin innumerable applications such as medicine. This isachieved through coordinated control of a master robot,locally utilized by the human operator, and a slave robotwhich mimics the human operator’s actions in the taskenvironment. In bilateral teleoperation control systems,time delay occurs during signal transfer between themaster and slave robots. The controller design for thesesystems involves trade offs between transparency androbust stability. The teleoperation system is completetransparent if the master and slave positions are equal,and the force displayed to the human is exactly thereaction force from the environment [3].
123

H. Shokri-Ghaleh, A. Alfi
To achieve stability and transparency, manyresearchers have proposed kinds of control methodsto overcome the time delay effects of bilateral tele-operation systems such as passivity theory [4], wavevariables [5], adaptive control [6], robust control [7],Smith predictor [8,9] and linear matrix inequality [10].The details of these control methods are reviewedin many literatures [11,12]. Prominent among themare passivity-based controllers, which can be catego-rized as follows: (i) scattering based [12]: This cat-egory includes the scattering-based methods that pro-vide delay-independent stability, however, cannot guar-antee position [4,5]. To increase tracking performance,some control schemes have been proposed [13–15], (ii)damping injection controllers: in this category, to insureposition tracking in presence of time delays, the propor-tional derivative (PD) and the proportional plus damp-ing injection controllers have been proposed [16], (iii)adaptive approaches: in this category, to provide posi-tion tracking and delay -independent stability, the phys-ical parameters of the teleoperator have been estimatedusing adaptive approaches [17–19].
Recently, the control scheme introduced by Chopraand Spong [20,21] has been developed [19,23], wherethe passivity of the human operator is not assumed. Thisframework successfully incorporates adaptive nonlin-ear control and drift-less stable teleoperation withoutthe use of wave variables. In [22], by considering theconstant human operator input, the master and the slaverobots are coupled using PD control strategy. The sys-tem is shown to be asymptotically stable if the couplinggain is appropriately chosen. In [23], the master andthe slave robots with different configuration have beenconsidered. The synchronization between the masterand the slave was also achieved using simple PD-likestrategy with sufficiently large damping injection [16].
Based on this, the key challenges in teleoperationsystems is the selection of control architectures andcontrol parameters, which are able to robustly stabi-lize the teleoperation system and guarantee the trans-parency despite of existing time delay in communi-cation channel and model parameters’ uncertainties.In the structure used in this paper, to insure stabil-ity and increase transparency, the control parametersshould be properly chosen. To solve this problem, themost elegant and precise numerical methods are gradi-ent descents, which may get trapped at local optimumdepending on the initial guess of solution [24]. To thisend, different stochastic search techniques have been
introduced in the literature such as genetic algorithm(GA). The main features of these algorithms are:
(a) The objective function’s gradient is not required.(b) They are population-based search algorithm. This
property insures that they usually do not get stuckinto so-called local optima.
(c) They use probabilistic transition rules. So, they cansupport search through a complicated and highlydimensional search space. This makes that they aremore flexible and robust in comparison with tradi-tional optimization methods.
(d) Unlike the traditional optimization methods, theyare not sensitive to starting point such that startinganywhere in the search space, the algorithm insuresthe convergence to the optimal solution.
Considering these features, these methods have beensuccessfully used in many applications [25–36] Untilnow, a few works have been reported for teleopera-tion controller design using optimization algorithms.In [37], H∞ controller design based on hierarchicalGA is proposed. In [38], the evolutionary programminghas been used for design of self-tuning controller forteleoperation systems. The major disadvantage in theformer approaches is that the time delay in communi-cation channel has not been considered. Consideringthe effect of time delay on the stability, the controllershave been designed in the presence time delay usingGA [39].
To find optimum solution in optimization problems,exploration and exploitation are two major parts. Theexploration refers to the ability to investigate the var-ious unknown regions in the solution space for dis-covering the global optimum, whereas the exploita-tion refers to the ability to apply the knowledge ofthe previous good solutions to find better solutions.GA can explore a wide range of search space, effi-ciently, but does not have efficient exploitation abil-ity. It means that GA does not have an effective localsearch mechanism for accurately searching near a goodsolution. Hence, it is generally reasonable that GA con-verge to the global optimum, but with a quite slowconvergence speed, i.e., achieving the global optimumwith sufficient precision often takes a very long time[40] In addition, GA takes long time for each func-tion evaluation since it requires some operators likemutation, crossover and selection operator. To over-come this problem, various heuristic algorithms havebeen introduced. These algorithms can be classified
123

Optimal synchronization of teleoperation systems
into different groups depending on the criteria beingconsidered such as population based, stochastic andetc. The most frequently used optimization algorithmsinclude artificial bee colony (ABC) [41,42], particleswarm optimization (PSO) [25–29], imperialist com-petitive (IC) algorithm [43] and biogeography-basedoptimization (BBO) [44]. Recently, new optimizationalgorithms introduced by Rajabioun [45] namely COalgorithm which has been shown to be competitive toother population-based algorithms. This optimizationalgorithm is inspired by the life of a bird family, calledcuckoo. Special lifestyle of these birds and their char-acteristics in egg laying and breeding has been the basicmotivation for development of this new population-based optimization algorithm.
As discussed earlier, the contribution of this paperis to achieve an optimal controller design in bilateralteleoperation systems for reducing time delay effects aswell as modeling uncertainty, in both free and contactmotions. Here, the control framework introduced by[39] is adopted. This requires optimizing a set of para-meters of the so-called synchronization control law. Tothis reason, meta-heuristic algorithms including CO,BBO, IC and ABC are employed that are most widelyused in scientific applications. According to our knowl-edge, this is the first research to apply aforementionedalgorithms for the synchronization problem in control-ling of bilateral teleoperation systems. Results showthat the performance of CO algorithm is better thanother algorithms in problem in hand.
It is noticeable that the preference of the standardversion of ABC has been compared to the standardversion of well-known population-based algorithmsincluding GA, PSO, Differential Evolution (DE) andEvolution Strategy (ES) [42]. Based on this, GA andPSO are not considered in this paper.
The rest of this paper is organized as follows. InSect. 2, a general description of the teleoperator systemis presented, and assumptions are introduced. In Sect. 3,the control objective and the controller design are for-mulated. Simulation results are discussed in Sect. 4.Finally, conclusions are given in Sect. 5.
2 Dynamics and objectives
This section demonstrates the problem formulation aswell as the assumptions needed for the stability analysisof the proposed controller.
2.1 Nonlinear dynamics of the teleoperation system
In this paper, n degrees of freedom robotic systems,corresponds to the master and slave, are assumed to bemodeled as
Mm(qm)qm + Cm(qm, qm)qm + gm(qm) = Fh + τm
(1)
Ms(qs)qs + Cs(qs, qs)qs + gs(qs) = τs − Fe (2)
where i = m designate the master robot and i = sstands for the slave robot, respectively, qi , qi , qi ∈ Rn
denote the joint positions, velocities and accelerations,respectively; Mi (qi ) ∈ Rn×n the inertia matrices;Ci (qi , qi ) ∈ Rn×n the Coriolis and centrifugal effects;gi (qi ) ∈ Rn the gravitational torques; τi ∈ Rn the con-trol input torques. Finally, Fh, Fe ∈ Rn indicate theforces at the joints due to the forces exerted by thehuman operator and the task environment, respectively.These dynamical models have the following importantproperties [46].
P1. The inertia matrix M(q) is symmetric positive def-inite, and it is lower and upper bounded, i.e.,
λm In×n ≤ Mi (qi ) ≤ λM In×n (3)
where λm and λM are the minimum and maximumeigenvalues of Mi (qi ), respectively.
P2. Using an appropriate definition of the matrixC(q, q), the matrix M(q)−2C(q, q) is skew sym-metric.
P3. The Lagrangian dynamics are linearly parameter-izable. Therefore,
Mi (qi )qi + Ci (qi , qi )qi + gi (qi ) = Yi (qi , qi , qi )θi
(4)
where θi ∈ Rl are vectors of the unknown parame-ters and Yi (qi , qi , qi ) ∈ Rn×l are regressor matri-ces.
2.2 General assumptions
We make the following general assumptions:
A1. Both human operator and task environment arepassive.
A2. The time delay in communication channel T > 0exists between the master and slave robots sym-metrically.
123

H. Shokri-Ghaleh, A. Alfi
2.3 Control goals
The goal of the proposed control structure is to achievecomplete transparency and robust stability for bilateralteleoperation systems in presence of parameters uncer-tainties by designing the control inputs τm and τs . Forthe synchronization control strategy, the main goals canbe itemized as follows.
G1. The closed-loop of the overall system must be sta-ble, in both free and constrained motions, inde-pendent of the constant time delay.
G2. The position tracking between the master and slaverobots must be guaranteed. It means that the slaveoutput qs has to follow the master output qm withan acceptable accuracy.
G3. Force tracking must be guaranteed in contactmotion. That means the environment reflectingforce Fe has to follow the operator force Fh .
Define the following synchronization position errorsbetween the master and slave robots.
em(t) = qs(t − T ) − qm(t) (5)
es(t) = qm(t − T ) − qs(t) (6)
Therefore, the bilateral teleoperation is said to statesynchronize if
limt→∞ em(t) = lim
t→∞ es(t) = 0 (7)
As a result, from Eq. (7), the master/slave robots statessynchronize if the coordination errors and their deriv-atives approach the origin asymptotically [19]. In con-tact motion, the force tracking errors can be also definedas
e f m(t) = Fe(t − T ) − Fh(t) (8)
e f s(t) = Fh(t − T ) − Fe(t) (9)
In this case, to achieve complete transparency, the fol-lowing condition must be considered.
limt→∞ e f m = lim
t→∞ e f s = 0 (10)
with qm(t) = qs(t) = qm(t) = qs(t) = 0
3 Control design
In this section, the control design problem is formu-lated. To compensate the modeling uncertainties, it isnecessary to find an appropriate mechanism. To thisend, in this paper, an adaptive mechanism is employed.
Based on the secondary input containing both positionand velocity information, a nonlinear adaptive feed-back control law is designed to render the local dynam-ics with respect to a secondary control input and outputcontaining both position and velocity information. Inorder to achieve the design objectives given in Eqs. (7)and (10), the master and slave torques are given as [47]
τm = −Mm(qm)λqm − Cm(qm, qm)λqm
+ gm(qm) + Fm (11)
τs = −Ms(qs)λqs − Cs(qs, qs)λqs
+ gs(qs) + Fs (12)
where Mi , Ci , gi (i = m, s) are estimated parame-ters due to parameter uncertainties of master and slaverobots, λ ∈ Rn×n is a positive definite matrix andFi (i = m, s) are additional control inputs for synchro-nization.
Substituting Eqs. (11) and (12) into Eqs. (1) and (2)it concludes
Mm(qm)(qm + λqm) + Cm(qm, qm)(qm + λqm)
= Mm(qm)λqm + Cm(qm, qm)λqm
−gm(qm) + Fm + Fh (13)
Ms(qs)(qs + λqs) + Cs(qs, qs)(qs + λqs)
= Ms(qs)λqs + Cs(qs, qs)λqs
−gs(qs) + Fs − Fe (14)
where Mi , Ci , gi (i = m, s) are parameter estimationerrors as
Mi = Mi − Mi (15)
Ci = Ci − Ci (16)
gi = gi − gi (17)
According to P3., Eqs. (13) and (14) can be rewrittenas
Mm(qm)rm + Cm(qm, qm)rm
= Ym(qm, qm)θm + Fm + Fh (18)
Ms(qs)rs + Cs(qs, qs)rs
= Ys(qs, qs)θs + Fs − Fe (19)
where Ym, Ys ∈ Rn×l are known functions of the gen-eralized coordinates, and θm, θs ∈ Rl are parameterestimation error vectors defined as
θm = θm − θm (20)
θs = θs − θs (21)
In addition, rm, rs are the new output variables as
rm = qm + λqm (22)
rs = qs + λqs (23)
123

Optimal synchronization of teleoperation systems
To estimate the uncertain parameters, we choose thefollowing adaptive law.
˙θm = �Y T
m rm (24)˙θs = �Y T
s rs (25)
where �,� ∈ Rn×n are positive constant definitematrices.
From the new output variables given in Eqs. (22)and (23), the synchronization error can be rewritten as
erm(t) = rs(t − T ) − rm(t)
= [qs(t − T ) + λqs(t − T ) − qm(t) − λqm(t)]= em + λem (26)
ers(t) = rm(t − T ) − rs(t)
= [qm(t − T ) + λqm(t − T ) − qs(t) − λqs(t)]= es + λes (27)
To accomplish synchronization between master andslave robots, the structure of additional control inputsFm, Fs is selectable. Here, the adopted structure is aPD controller, which is given by
Fm = K P em(t) + K Dem(t) (28)
Fs = K P es(t) + K Des(t) (29)
where K P , K D ∈ Rn×n are positive definite diagonalmatrices. Without loss of generality, it is assumed thatK P = kp In×n and K D = kd In×n where kp, kd ∈ Rand In×n ∈ Rn×n is identity matrix.
Theorem Consider the nonlinear bilateral teleoper-ation systems described by Eqs. (18) and (19). Thenusing the adaptive laws defined in Eqs. (24) and (25)and the additional control inputs given in Eqs. (28) and(29), the system is asymptotically stable and synchro-nization errors converge to zero.
Proof See “Appendix”.When applying the controllers into the system, we
face with choosing an arbitrary set of gains for thedynamic of synchronization error, which is determinedby the matrices K P and K D . It is unclear how the arraysof matrices K P and K D are properly chosen, since thesematrices are directly related to the controller perfor-mance. The manual tuning is a time-consuming taskand depends considerably on knowledge of the plantand experience of an operator. From these viewpoints,it is required to develop an optimal tuning strategy ofthe controllers, which can determine a set of controller
gains simultaneously by solving an optimization prob-lem. To this end, the problem in hand can be consideredas an optimization problem.
Almost all of optimization algorithms are iterativealgorithms. In population-based algorithms, it is usualgiven an initial population and then repeatedly iteratesfrom old population to a new one by some cooperativemechanism such as sharing information among indi-viduals. Finally, the best individual in last populationcan be as the desired solution.
Based on this, to solve the optimization problem inhand, firstly it is necessary that the values of problemvariables be formed as an array, which is called prob-lem solutions. Then, the fitness values of the problemsolutions are evaluated according to the cost function.To obtain final results with the best fitness functionvalue, the search process is carried out in each of theiteration. Using this procedure, the optimal gains ofthe controller (K P , K D) are obtained to minimize thesynchronization errors given in [28] and [29].
To achieve the optimal performance, in this paper,the most well-known meta-heuristic algorithms namelyCO, BBO, IC and ABC are employed. The performanceof these algorithms is further compared with respect tothe cost function. In the next section, the optimizationalgorithm used in this paper will be discussed briefly.
4 Optimization algorithms
In this section, we describe the basic principle of opti-mization algorithm briefly used in this paper.
4.1 CO algorithm
Recently a novel EA namely CO algorithm, which isinspired by the life of cuckoo has been proposed [45].Like other nature-inspired algorithms, CO algorithmis also a population-based method and utilizes a pop-ulation of solutions to proceed to the global solution.Specific egg laying and breeding of cuckoos form thebasis of this algorithm. Cuckoos used in this modelingexist in two forms: mature cuckoos and eggs. Maturecuckoos lay eggs in some other birds’ nest and if theseeggs are not recognized and not killed by host birds,they grow and become a mature cuckoo. Environmen-tal features and the immigration of societies (groups) ofcuckoos hopefully lead them to converge and find the
123
H. Shokri-Ghaleh, A. Alfi
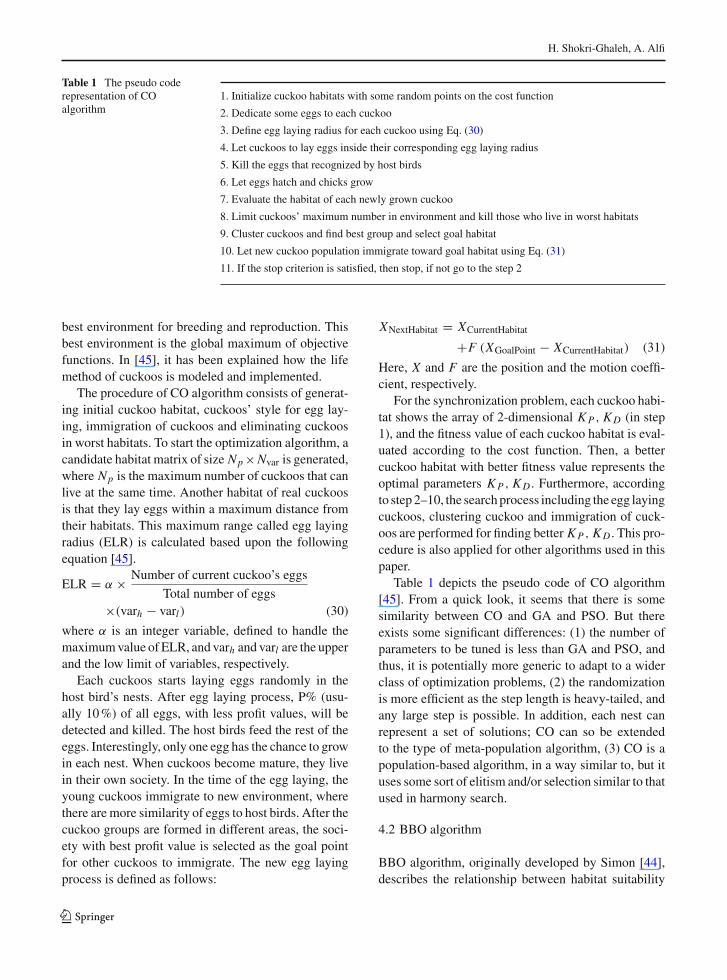
Table 1 The pseudo coderepresentation of COalgorithm
1. Initialize cuckoo habitats with some random points on the cost function
2. Dedicate some eggs to each cuckoo
3. Define egg laying radius for each cuckoo using Eq. (30)
4. Let cuckoos to lay eggs inside their corresponding egg laying radius
5. Kill the eggs that recognized by host birds
6. Let eggs hatch and chicks grow
7. Evaluate the habitat of each newly grown cuckoo
8. Limit cuckoos’ maximum number in environment and kill those who live in worst habitats
9. Cluster cuckoos and find best group and select goal habitat
10. Let new cuckoo population immigrate toward goal habitat using Eq. (31)
11. If the stop criterion is satisfied, then stop, if not go to the step 2
best environment for breeding and reproduction. Thisbest environment is the global maximum of objectivefunctions. In [45], it has been explained how the lifemethod of cuckoos is modeled and implemented.
The procedure of CO algorithm consists of generat-ing initial cuckoo habitat, cuckoos’ style for egg lay-ing, immigration of cuckoos and eliminating cuckoosin worst habitats. To start the optimization algorithm, acandidate habitat matrix of size Np × Nvar is generated,where Np is the maximum number of cuckoos that canlive at the same time. Another habitat of real cuckoosis that they lay eggs within a maximum distance fromtheir habitats. This maximum range called egg layingradius (ELR) is calculated based upon the followingequation [45].
ELR = α × Number of current cuckoo’s eggs
Total number of eggs×(varh − varl) (30)
where α is an integer variable, defined to handle themaximum value of ELR, and varh and varl are the upperand the low limit of variables, respectively.
Each cuckoos starts laying eggs randomly in thehost bird’s nests. After egg laying process, P% (usu-ally 10 %) of all eggs, with less profit values, will bedetected and killed. The host birds feed the rest of theeggs. Interestingly, only one egg has the chance to growin each nest. When cuckoos become mature, they livein their own society. In the time of the egg laying, theyoung cuckoos immigrate to new environment, wherethere are more similarity of eggs to host birds. After thecuckoo groups are formed in different areas, the soci-ety with best profit value is selected as the goal pointfor other cuckoos to immigrate. The new egg layingprocess is defined as follows:
XNextHabitat = XCurrentHabitat
+F (XGoalPoint − XCurrentHabitat) (31)
Here, X and F are the position and the motion coeffi-cient, respectively.
For the synchronization problem, each cuckoo habi-tat shows the array of 2-dimensional K P , K D (in step1), and the fitness value of each cuckoo habitat is eval-uated according to the cost function. Then, a bettercuckoo habitat with better fitness value represents theoptimal parameters K P , K D . Furthermore, accordingto step 2–10, the search process including the egg layingcuckoos, clustering cuckoo and immigration of cuck-oos are performed for finding better K P , K D . This pro-cedure is also applied for other algorithms used in thispaper.
Table 1 depicts the pseudo code of CO algorithm[45]. From a quick look, it seems that there is somesimilarity between CO and GA and PSO. But thereexists some significant differences: (1) the number ofparameters to be tuned is less than GA and PSO, andthus, it is potentially more generic to adapt to a widerclass of optimization problems, (2) the randomizationis more efficient as the step length is heavy-tailed, andany large step is possible. In addition, each nest canrepresent a set of solutions; CO can so be extendedto the type of meta-population algorithm, (3) CO is apopulation-based algorithm, in a way similar to, but ituses some sort of elitism and/or selection similar to thatused in harmony search.
4.2 BBO algorithm
BBO algorithm, originally developed by Simon [44],describes the relationship between habitat suitability
123

Optimal synchronization of teleoperation systems
Table 2 The pseudo coderepresentation of BBOalgorithm
1. Initialize the BBO parameters
2. Initialize a random set of habitats, each habitat corresponding to a potential solution to the givenproblem
3. Calculate the immigration rate and emigration rate for each island
4. Probabilistically choose the immigrating islands based on the immigration rates
5. Migrate randomly selected SIVs based on the selected islands in the previous step
6. Probabilistically perform mutation based on the mutation probability for each island
7. Calculate the fitness of each individual island
8. If the stop criterion is satisfied, then stop, if not go to the step 3
and the migration of species across habitats. It is anexample of how a natural process can be modeled tosolve optimization problems. BBO utilizes the threeterms from the biogeography theory: habitats, habitatsuitability index (HSI) and suitability index variables(SIVs). Habitats are analogous to problem solutions,HSI is analogous to fitness of habitats, and SIVs arethe independent variables, or the domain, of a solutionof the optimization problem.
A good solution is analogous to an island with a highHSI, and a poor solution is like an island with a lowHSI. High-HSI solutions are more likely to share theirfeatures with other solutions, and low-HSI solutionsare more likely to accept shared features from othersolutions. This approach to problem solving is calledbiogeography-based optimization. Like GA, BBO is analgorithm that solves the problem by sharing the indi-vidual information in the population and updating thepopulation generation by generations using the sharedindividual information. GA solutions “die” at the endof each generation, whereas BBO solutions survive for-ever (although their characteristics change as the opti-mization process progresses).
The most key difference between BBO and GA isthat it applies different concepts in its information shar-ing step to accomplish the optimization namely migra-tion. Migration is reciprocal—there is both immigra-tion and emigration between habitats. The probabilitiesof an SIV immigrating to a habitat, or emigrating froma habitat are determined by the HIS. Their respectiverates are shown by λ and μ. These probabilities aretypically complements of each other (i.e., λ = 1 − μ).A habitat with a high HSI will have a low immigra-tion rate and a high emigration rate. This is based onnatural biogeography in which a habitat with a highHSI already hosts a large number of species and thus
cannot accept many immigrants. Conversely, a habitatwith a low HSI has a high immigration rate and a lowemigration rate. Again, this is based on biogeographyin which a habitat with a low HSI has a low numberof species and thus is a more likely destination for theimmigration of newcomers. Table 2 provides an outlineof the BBO algorithm [44].
4.3 IC algorithm
IC algorithm is one of the most powerful evolutionaryalgorithms. It has been used extensively to solve differ-ent kinds of optimization problems such as electromag-netic problems [48] and linear induction motor design[49]. IC algorithm starts with an initial population. Pop-ulation individuals called countries are divided into twotypes: imperialists (best solutions) and colonies (restof the solutions) that all together form some empires.Competition among empires forms the foundation ofIC algorithm, which is based on empire’s power.
During this competition, weak empires collapse andpowerful ones take possession of their colonies. Theimperialists try to absorb more colonies to their empireand the colonies will change according to the policies ofimperialists. Imperialistic competition hopefully con-verges to a state in which there is only one empire andits colonies are in the same position and have the samecost as the imperialist.
The colony moves toward the imperialist by x units.In this movement, θ and x are random numbers withuniform distribution such that x ∼ U (0, β×l) and θ ∼U (−γ, γ ), where l is the distance between the colonyand the imperialist and β and γ are the parametersthat modify the area where colonies randomly searcharound the imperialist. Note that β is a number that is
123

H. Shokri-Ghaleh, A. Alfi
Table 3 The pseudo coderepresentation of ICalgorithm
1. Select some random points from the function
2. initialize the empires
3. Move the colonies toward their relevant imperialist (Assimilation)
4. Randomly change the position of some colonies (Revolution)
5. If there is a colony in an empire which has lower cost than the imperialist, exchange thepositions of that colony and the imperialist
6. Unite the similar empires
7. Compute the total cost of all empires
8. Pick the weakest colonies from the weakest empires and give them to one of the empires(Imperialistic competition)
9. Eliminate the powerless empires
10. If the stop criterion is satisfied, then stop, if not go to the step 3
greater than one. In the most of implementations, thisparameter is set to 2. The pseudo code of IC algorithmis given in Table 3 [43].
4.4 ABC algorithm
ABC algorithm is one of the most recently swarm-based algorithms [41]. This algorithm is based on theintelligent behavior of honey bee swarms finding nec-tar and sharing the information of food sources witheach other.
Collecting, processing and advertising of nectars areexamples of intelligent behaviors of honey bees. ABCalgorithm has the advantages of strong robustness, fastconvergence, high flexibility and fewer control parame-ters. These capabilities provide an appropriate conver-gence performance to ABC algorithm. Based on this,ABC algorithm has been utilized for different solvingmultidimensional and multimodal optimization prob-lems [50].
ABC classifies the foraging artificial bees into threegroups of bees, namely, employed bees, onlooker andscout. In this algorithm, the half of the colony includesthe employed bees and the other half consists of theonlookers. For every food source, there is only oneemployed bee. It means that the number of employedbees is equal to the number of food sources around thehive. Employed bees search the food around the foodsource in their memory; meanwhile, they pass theirfood information to onlooker bees. Onlooker bees tendto select good food sources from those founded by theemployed bees, then further search the foods around the
selected food source. Scout bees are translated from afew employed bees, which abandon their food sourcesand search new ones. Another issue that is consideredin the algorithm is that the employed bee whose foodsource has been exhausted by the bees becomes a scout.In other words, if a solution representing a food sourceis not improved by a predetermined number of trials,then the food source is abandoned by its employed beeand the employed bee is converted to a scout. Shortpseudo code of the ABC algorithm is given in Table 4[41].
5 Simulations
We now show the design process of the proposed con-trol strategy by assuming that the local and remote sitesare connected by Internet telecommunication channelwhere CO, BBO, IC and ABC algorithms are appliedto obtain optimal parameters of the proposed con-troller. The software is implemented by the MATLAB7.11.0.584 (R2010b) language on a laptop computerwith Corei3 2.1 GHz speed processor and 4 GB RAM.In our evaluation, two mechanical arms are consideredas the master and the slave robots, which has been uti-lized in [21,39,47]. The dynamic equation of the masterand the slave robots are given by
Mm(qm)qm = Fh + τm (32)
Ms(qs)qs = τs − Fe (33)
where
τm = −Mm(qm)λqm + Fm (34)
τs = −Ms(qs)λqs + Fs (35)
123

Optimal synchronization of teleoperation systems
Table 4 The pseudo coderepresentation of ABCalgorithm
1. Initialize the population of solutions
2. Evaluate the population
3. Produce new solutions for the employed bees
4. Apply the greedy selection process
5. Calculate the probability values
6. Produce the new solutions for the onlookers
7. Apply the greedy selection process
8. Determine the abandoned solution for the scout and replace it with a new randomly producedsolution
9. Memorize the best solution achieved so far until (requirements are met)
Applying the new output variables given in Eqs. (22)and (23), the system can be rewritten as follows.
Mm(qm)rm = Ym(qm, qm)θm + Fm + Fh (36)
Ms(qs)rs = Ys(qs, qs)θs + Fs − Fe (37)
where θi = Mi = Mi − Mi , Yi (qi ) = λqi (i = m, s)and Fm and Fs are defined in Eqs. (28) and (29).
Since the task environment is considered as animpedance, the reflecting force of task environment Fe
are modeled as [51]
Fe ={
0, if qs < de
−Beqs − Ke(qs − de), if qs ≥ de(38)
where de is the distance angle to the obstacle, Be andKe are damping coefficient and stiffness coefficient ofthe environment, respectively, which are considered forhard motion. Furthermore, the human force Fh is con-sidered as [47]
Fh = K (1 − qm) (39)
where K is the stiffness coefficient.In simulations, the system parameters are chosen
as follows. Mm = Ms = 4, de = 0.5, λ = 2, Be =100, Ke = 3, 000, K = 10, � = � = 0.5 The timedelay in communication channel is also set to 0.5 s.
5.1 Constrain handling
Before proceeding with the optimization operations, aperformance criterion should be first defined. As clearlymentioned in “Appendix”, we choose λ = K −1
D K P .Based on this, in the present optimization problem,CO, BBO, IC and ABC algorithms are utilized for aconstrained minimization. To handle the constraints inthe optimization algorithm, penalty function scheme is
employed which converts the unconstrained problemto a constrained one by adding an additional value cor-responding to the level of constraint violation to theoriginal objective value. The cost function can gener-ally be described as follows.
J = f (x) +n∑
i=1
R j j (x) (40)
where R j is a penalty coefficient for j th constraintwhich has a relatively large value comparing to f (x).The amount of R j should be set by a trial and errorprocess. This process should be repeated for any objec-tive since it is problem dependant. Note that exces-sively large amount of penalties eliminate the infea-sible solutions quickly, but decrease search efficiency,also, insufficient penalties usually result in infeasiblefinal solutions. As a result, in this paper, the followingcost function J is considered.
J =∫ ∞
0{e2
m(t) + e2s (t)}dt+100
(K p
Kd− λ
)2
(41)
To minimize the above cost function, all aforemen-tioned algorithms are applied to this problem 12 inde-pendently times.
5.2 Determination of the algorithms parameters
The population size is an important factor in deter-mination of optimal solution. If the population size isincreased, then it can better explore the solution space,but it would augment the computation burden. In orderto make fair comparison, the corresponding popula-tion size for each algorithm is chosen 20. Moreover,the maximum number of iteration is set to 30 as a stop-ping criterion. The setting values of algorithmic control
123
H. Shokri-Ghaleh, A. Alfi
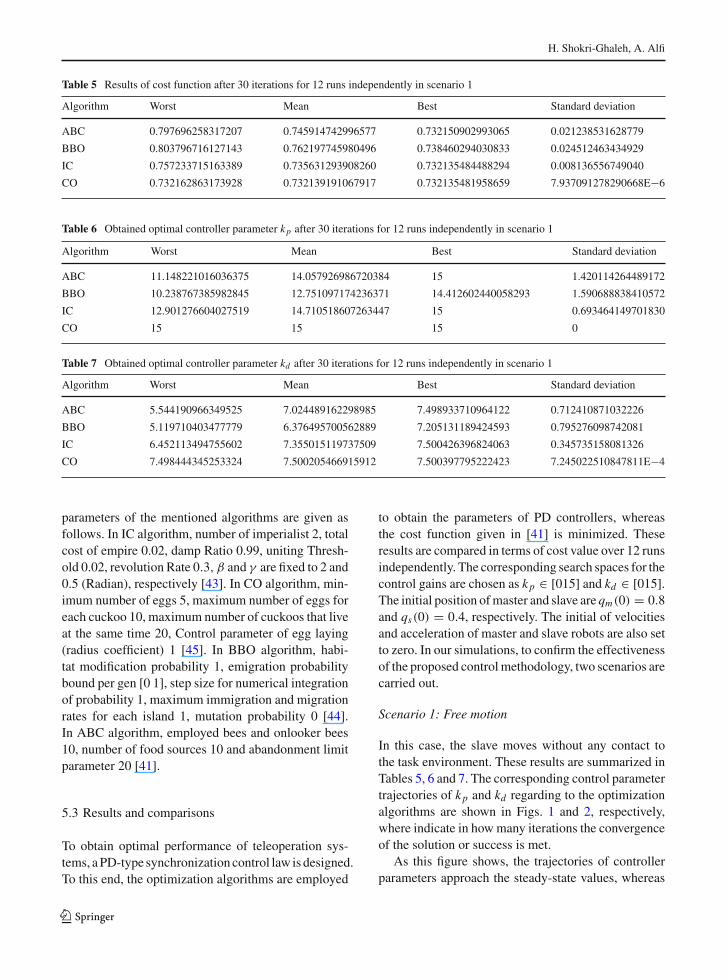
Table 5 Results of cost function after 30 iterations for 12 runs independently in scenario 1
Algorithm Worst Mean Best Standard deviation
ABC 0.797696258317207 0.745914742996577 0.732150902993065 0.021238531628779
BBO 0.803796716127143 0.762197745980496 0.738460294030833 0.024512463434929
IC 0.757233715163389 0.735631293908260 0.732135484488294 0.008136556749040
CO 0.732162863173928 0.732139191067917 0.732135481958659 7.937091278290668E−6
Table 6 Obtained optimal controller parameter kp after 30 iterations for 12 runs independently in scenario 1
Algorithm Worst Mean Best Standard deviation
ABC 11.148221016036375 14.057926986720384 15 1.420114264489172
BBO 10.238767385982845 12.751097174236371 14.412602440058293 1.590688838410572
IC 12.901276604027519 14.710518607263447 15 0.693464149701830
CO 15 15 15 0
Table 7 Obtained optimal controller parameter kd after 30 iterations for 12 runs independently in scenario 1
Algorithm Worst Mean Best Standard deviation
ABC 5.544190966349525 7.024489162298985 7.498933710964122 0.712410871032226
BBO 5.119710403477779 6.376495700562889 7.205131189424593 0.795276098742081
IC 6.452113494755602 7.355015119737509 7.500426396824063 0.345735158081326
CO 7.498444345253324 7.500205466915912 7.500397795222423 7.245022510847811E−4
parameters of the mentioned algorithms are given asfollows. In IC algorithm, number of imperialist 2, totalcost of empire 0.02, damp Ratio 0.99, uniting Thresh-old 0.02, revolution Rate 0.3, β and γ are fixed to 2 and0.5 (Radian), respectively [43]. In CO algorithm, min-imum number of eggs 5, maximum number of eggs foreach cuckoo 10, maximum number of cuckoos that liveat the same time 20, Control parameter of egg laying(radius coefficient) 1 [45]. In BBO algorithm, habi-tat modification probability 1, emigration probabilitybound per gen [0 1], step size for numerical integrationof probability 1, maximum immigration and migrationrates for each island 1, mutation probability 0 [44].In ABC algorithm, employed bees and onlooker bees10, number of food sources 10 and abandonment limitparameter 20 [41].
5.3 Results and comparisons
To obtain optimal performance of teleoperation sys-tems, a PD-type synchronization control law is designed.To this end, the optimization algorithms are employed
to obtain the parameters of PD controllers, whereasthe cost function given in [41] is minimized. Theseresults are compared in terms of cost value over 12 runsindependently. The corresponding search spaces for thecontrol gains are chosen as kp ∈ [015] and kd ∈ [015].The initial position of master and slave are qm(0) = 0.8and qs(0) = 0.4, respectively. The initial of velocitiesand acceleration of master and slave robots are also setto zero. In our simulations, to confirm the effectivenessof the proposed control methodology, two scenarios arecarried out.
Scenario 1: Free motion
In this case, the slave moves without any contact tothe task environment. These results are summarized inTables 5, 6 and 7. The corresponding control parametertrajectories of kp and kd regarding to the optimizationalgorithms are shown in Figs. 1 and 2, respectively,where indicate in how many iterations the convergenceof the solution or success is met.
As this figure shows, the trajectories of controllerparameters approach the steady-state values, whereas
123

Optimal synchronization of teleoperation systems
5 10 15 20 25 309
10
11
12
13
14
15
16
Iterations
Kp
ABC BBO IC CO
Fig. 1 The controller parameter trajectory of kp in scenario 1
their steady-state values are given in Tables 6 and 7.The convergence of cost function at each generationis also plotted in Fig. 3. It confirms the superiority ofCO algorithm in terms of accuracy and convergencespeed. By investigating the results presented in thiscase, it can be observed that the results obtained byCO algorithm outperform the other optimization algo-rithms. CO algorithm spends extremely fewer iterationswhen compared with other algorithms. Based on this,the aim is to avoid confusion between the results of COand other algorithms, so only the result of CO whichis the best result obtained among other algorithms interms of convergence speed are compared, excluding
Fig. 2 The controllerparameter trajectory of kd inscenario 1
5 10 15 20 25 304.5
5
5.5
6
6.5
7
7.5
8
Iterations
kd
ABC BBO IC CO
Fig. 3 Comparison ofconvergence of fitnessfunction in scenario 1
5 10 15 20 25 300.5
1
1.5
2
2.5
3
Iterations
Fit
nes
s F
un
ctio
n
ABC BBO IC CO20 22 24 26 28 30
0.73
0.735
0.74
0.745
0.75
0.755
0.76
0.765
0.77
123

H. Shokri-Ghaleh, A. Alfi
0 2 4 6 8 102
2.5
3
3.5
4
4.5
Time (Sec)
Par
amet
er E
stim
atio
n
Mm
Hat
Ms Hat
Fig. 4 Parameter estimation profile using ABC in scenario 1
0 2 4 6 8 102
2.5
3
3.5
4
4.5
Time (Sec)
Par
amet
er E
stim
atio
n
Mm
Hat
Ms Hat
Fig. 5 Parameter estimation profile using BBO in scenario 1
the rest. The estimation process is also shown in Figs. 4,5, 6 and 7. It can be obvious that the estimated valuesconverge to the real value by using CO. The positiontracking response is shown in Fig. 8. It is to be noted thatthe slave starts from an offset of 0.4 units, but still man-ages to converge to the master joint angle. Referring tothese figures, it is apparent that not only the proposedstructure has optimal performance ability, but also it isrobust against the time delay existed in communicationchannel and parameter uncertainty.
Scenario 2: Contact motion
In this case, the slave moves in contact with the taskenvironment. Figures 9 and 10 describe the progress ofparameter optimization of kp and kd , respectively. Thecost function is also shown in Fig. 11. The results ofCO, BBO, IC and ABC algorithms including value ofcost function and statistical results corresponding to kp
and kd are listed in Tables 8, 9 and 10. In addition, theestimation process is depicted in Figs. 12, 13, 14 and15. The comparison reveals that CO algorithm is supe-rior to these existing algorithms in problem in hand.So in this part, to show the performance of the proposed
0 2 4 6 8 102
2.5
3
3.5
4
4.5
Time (Sec)
Par
amet
er E
stim
atio
n
Mm
Hat
Ms Hat
Fig. 6 Parameter estimation profile using IC in scenario 1
0 2 4 6 8 102
2.5
3
3.5
4
4.5
Time (Sec)
Par
amet
er E
stim
atio
n
Mm
Hat
Ms Hat
Fig. 7 Parameter estimation profile using CO in scenario 1
control structure, CO algorithm is only applied. Theposition and force tracking are represented in Figs. 16and 17, respectively. Referring to these figures, it can beobvious that the position and force tracking areachievedwhen there is an initial offset between the master andthe slave. In summary, the above simulation results inboth two scenarios indicate the stable transparent bilat-eral teleoperationsystem in presence time delay andparameter uncertainties.
6 Conclusions
The main challenge in teleoperation systems is theselection of the control architectures and the controllerparameters. Generally, the designed controller leadsto non-optimality in the performance of the system.The motivation of the present work was to apply thepopulation-based optimization algorithm specially COalgorithm for obtaining optimal controller design forsynchronization of teleoperation systems. The results
123

Optimal synchronization of teleoperation systems
Fig. 8 Position trackingusing CO in scenario 1
0 2 4 6 8 10
0.4
0.6
0.8
1
Time (Sec)
Po
siti
on
Tra
ckin
g (
Rad
)
qm
qs
5.6 5.8 6 6.2 6.4 6.60.9996
0.9998
1
1.0002
1.0004
1.0006
1.0008
5 10 15 20 25 3010
11
12
13
14
15
16
Iterations
kp
ABC BBO IC CO
Fig. 9 The controller parameter trajectory of kp in scenario 2
represented the slave can follow the master in spiteof time delays and modeling uncertainties. The per-formance of the proposed control structure was also
compared with other optimization algorithms includ-ing BBO, IC and ABC. The results demonstrated thesuperiority of CO algorithm over aforementioned opti-mization algorithms in problem in hand.
Appendix
Proof According to (28), we have
Fm = K Dem(t) + K P em(t)
= K D(em + K −1D K P em) (42)
Choosing λ = K −1D K P and using Eqs. (26) and (27),
Eq. (42) can be rewritten as
Fm = K D(em + λem)
= K Derm
= K D[rs(t − T ) − rm(t)] (43)
Fig. 10 The controllerparameter trajectory of kd inscenario 2
5 10 15 20 25 305
5.5
6
6.5
7
7.5
8
Iteration
kd
ABC BBO IC CO
25 26 27 28 29 307.499
7.4995
7.5
7.5005
123

H. Shokri-Ghaleh, A. Alfi
Fig. 11 Comparison ofconvergence of fitnessfunction in scenario 2
5 10 15 20 25 304
4.2
4.4
4.6
4.8
5
5.2
5.4
5.6
5.8
Iterations
Fit
nes
s F
un
ctio
n
ABC BBO IC CO
20 22 24 26 28 304.1157
4.1158
4.1159
4.116
4.1161
4.1162
Table 8 Results of cost function after 30 iterations for 12 runs independently in scenario 2
Algorithm Worst Mean Best Standard deviation
ABC 4.214682358927744 4.150270737817856 4.115856451653709 0.030526217178463
BBO 4.476096117360366 4.250438928957550 4.128864232203182 0.112669497319995
IC 4.116851907793265 4.115858994131727 4.115732989852164 3.253418206149674E−4
CO 4.115737680438127 4.115733991577767 4.115732989771088 1.484218857775288E−6
Table 9 Obtained optimal controller parameter kp after 30 iterations for 12 runs independently in scenario 2
Algorithm Worst Mean Best Standard deviation
ABC 13.652659483585833 14.730252020064754 15 0.465191358961937
BBO 9.984867648555174 13.077475834291770 14.808630313258602 1.570205685578714
IC 15 15 15 0
CO 15 15 15 0
Similarly, from Eq. (29), we get
Fs = K D(es + λes)
= K Ders
= K D[rm(t − T ) − rs(t)] (44)
In addition, under Assumption A1., the followingequation can be derived [47].∫ t
0(FT
e rs − FTh rm)dt ≥ 0 (45)
In order to analyze the stability, consider the followingLyapunov function candidate
Table 10 Obtained optimal controller parameter kd after 30 iterations for 12 runs independently in scenario 2
Algorithm Worst Mean Best Standard deviation
ABC 6.796935074775891 7.364503486319742 7.495281748905689 0.256066075370060
BBO 4.994594795307500 6.534318781165946 7.411371953051200 0.783984357120507
IC 7.512007046974676 7.500068885347471 7.499434386900383 0.004351812059670
CO 7.500257335896449 7.499644116154962 7.499455481543208 3.32551395549528E−4
123

Optimal synchronization of teleoperation systems
0 2 4 6 8 103.2
3.4
3.6
3.8
4
4.2
Time (Sec)
Par
amet
er E
stim
atio
n
Mm
Hat
Ms Hat
Fig. 12 Parameter estimation profile using ABC in scenario 2
0 2 4 6 8 103.2
3.4
3.6
3.8
4
4.2
Time (Sec)
Par
amet
er E
stim
atio
n
Mm
Hat
Ms Hat
Fig. 13 Parameter estimation profile using BBO in scenario 2
0 2 4 6 8 103.2
3.4
3.6
3.8
4
4.2
Time (Sec)
Par
amet
er E
stim
atio
n
Mm
Hat
Ms Hat
Fig. 14 Parameter estimation profile using IC in scenario 2
V = V1 + V2 + V3 (46)
where
V1 = r Tm Mmrm + r T
s Msrs
+2∫ t
0(FT
e rs − FTh rm)dt (47)
V2 = K D
∫ t
t−T(r T
m rm + r Ts rs)dt + eT
mλK Dem
+ eTs λK Des (48)
0 2 4 6 8 103.2
3.4
3.6
3.8
4
4.2
Time (Sec)
Par
amet
er E
stim
atio
n
Mm
Hat
Ms Hat
Fig. 15 Parameter estimation profile using CO in scenario 2
0 2 4 6 8 100.2
0.4
0.6
0.8
1
1.2
Time (Sec)
Po
siti
on
Tra
ckin
g (
Rad
)
qm
qs
Fig. 16 Position tracking using CO in scenario 2
0 2 4 6 8 10-50
0
50
100
150
200
Time (Sec)
Fo
rces
(N
)
Fe
Fh
Fig. 17 Force tracking using CO in scenario 2
V3 = θTm �−1θm + θT
s �−1θs (49)
The time derivative of the Lyapunov function alongthe trajectory of the system is given as follows: Forderivative of V1, we have
V1 = 2r Tm Mmrm + 2r T
s Msrs + r Tm Mmrm + r T
s Msrs
+ 2FTe rs − 2FT
h rm
= 2r Tm (−Cmrm + Fh + Ym θm + Fm)
+ 2r Ts (−Csrs − Fe + Ys θs + Fs)
123

H. Shokri-Ghaleh, A. Alfi
+ r Tm Mmrm + r T
s Msrs + 2FTe rs − 2FT
h rm
= 2r Tm Fm + 2r T
s Fs + 2r Tm Ym θm + 2r T
s Ys θs
+ r Tm (Mm − 2Cm)rm + r T
s (Ms − 2Cs)rs (50)
From P2. (Mi (q) − 2Ci (q, q), i = m, s) is a skewsymmetric matrix. Thus
V1 = 2r Tm Fm + 2r T
s Fs + 2r Tm Ym θm + 2r T
s Ys θs (51)
For derivative of V2, we have
V2 = K D[r Tm rm + r T
s rs − r Tm (t − T )rm(t − T )
−r Ts (t − T )rs(t − T )]
+ 2eTmλK Dem + 2eT
s λK Des
= K D[rm − rs(t − T )]T [rm + rs(t − T )]+ K D[rs − rm(t − T )]T [rs + rm(t − T )]+ 2eT
mλK Dem + 2eTs λK Des
= K D[rm − rs(t − T )]T [2rm − rm + rs(t − T )]+ K D[rs − rm(t − T )]T [2rs − rs + rm(t − T )]+ 2eT
mλK Dem + 2eTs λK Des
= 2r Tm K D[rm − rs(t − T )]
+ 2r Ts K D[rs − rm(t − T )]
− K D[rm − rs(t − T )]T [rm − rs(t − T )]− K D[rs − rm(t − T )]T [rs − rm(t − T )]+ 2eT
mλK Dem + 2eTs λK Des
= −2r Tm K D[rs(t − T ) − rm]
− 2r Ts K D[rm(t − T ) − rs]
− K D[rm − rs(t − T )]T [rm − rs(t − T )]− K D[rs − rm(t − T )]T [rs − rm(t − T )]+ 2eT
mλK Dem + 2eTs λK Des (52)
From Eqs. (26) and (27), we have
V2 = −2r Tm K D[rs(t − T ) − rm]
− 2r Ts K D[rm(t − T ) − rs]
− (em + λem)T K D(em + λem)
− (es + λes)T K D(es + λes)
+ 2eTmλK Dem + 2eT
s λK Des (53)
Substituting (43) and (44) into Eq. (53), it yields
V2 = −2r Tm Fm − 2r T
s Fs − eTm K Dem
− eTs K Des − eT
mλT K Dλem − eTs λT K Dλes
(54)
The derivative of V3 is given by
V3 = 2θTm �−1 ˙
θm + 2θTs �−1 ˙
θs
+ θTm �−1θm + θT
s �−1θs
= −2θTm �−1 ˙
θm − 2θTs �−1 ˙
θs (55)
Using Eqs. (24) and (25), it is straightforward to seethat
V3 = −2θTm �−1�Y T
m rm − 2θTs �−1�Y T
s rs
= −2θTm Y T
m rm − 2θTs Y T
s rs (56)
From there
V = V1 + V2 + V3
= (2r Tm Fm + 2r T
s Fs + 2r Tm Ym θm
+ 2r Ts Ys θs) + (−2r T
m Fm − 2r Ts Fs − eT
m K Dem
− eTs K Des − eT
mλT K Dλem − eTs λT K Dλes)
+ (−2θTm Y T
m rm − 2θTs Y T
s rs)
= − eTm K Dem − eT
s K Des
− eTmλT K Dλem − eT
s λT K Dλes (57)
As is evident above, the time derivative of the Lyapunovfunction V is negative semi definite. To illustrate thatV is the uniformly continuous in time, it is necessaryto show that V is finite. Taking the time derivative from(57) leads to
V = −2eTm K Dem − 2eT
s K Des
−2eTmλT K Dλem − 2eT
s λT K Dλes (58)
It is obvious that V satisfies the bounded conditionwhen em, es, em and es are bounded. Because of Vis negative semi definite, rm, rs, θm, θs are boundedfrom (57). Since rm and rs are bounded, it follows thatqs, qm, qs and qm are bounded and thus es, em, es andem are also bounded. According to Eq. (4), qs and qm
and thus es and em are also bounded. It concludes that Vsatisfies the bounded condition. Now, from Barbalat’slemma [52], V is uniformly continuous and then V con-verge to zero. This proves that the signals em, es, em, es
converge to zero as well as the system is asymptoticallystable. This completes the proof. �
References
1. Zhang, G.D., Shen, Y.: Exponential synchronization ofdelayed memristor-based chaotic neural networks via peri-odically intermittent control. Neural Netw. 55, 1–10 (2014)
123

Optimal synchronization of teleoperation systems
2. Zhang, G.D., Shen, Y., Chen, B.S.: Hopf bifurcation ofa predator-prey system with predator harvesting and twodelays. Nonlinear Dyn. 73, 2119–2131 (2013)
3. Yokokohji, Y., Yoshikawa, T.: Bilateral control of master-slave manipulators for ideal kinesthetic coupling: formu-lation and experiment. IEEE Trans. Robot. Autom. 10(5),605–620 (1994)
4. Anderson, R.J., Spong, M.W.: Bilateral control of teleoper-ators with time delay. IEEE Trans. Autom. Control 34(5),494–501 (1989)
5. Niemeyer, G., Slotine, J.: Stable adaptive teleoperation.IEEE J. Ocean. Eng. 16(1), 152–162 (1991)
6. Shahdi, A., Sirouspour, S.: Adaptive/Robust control fortime-delay teleoperation. IEEE Trans. Robot. 25(1), 196–205 (2009)
7. Alfi, A., Khosravi, A., Lari, A.: Swarm-based structure-specified controller design for bilateral transparent teleop-eration systems via μ synthesis. IMA J. Math. Control Inf.(2013). doi:10.1093/imamci/dnt005
8. Alfi, A., Farrokhi, M.: A simple structure for bilateral trans-parent teleoperation systems with time delay. ASME J. Dyn.Syst. Meas. Control 130(4), 044502 (2008). doi:10.1115/1.2936854
9. Alfi, A., Farrokhi, M.: Force reflecting bilateral control ofmaster-slave systems in teleoperation. Intell. Robot. Syst.52(2), 209–232 (2008)
10. Alfi, A., Khosravi, A., Roshandel, A.: Delay-dependent sta-bility for transparent bilateral teleoperation system in pres-ence of model mismatch: an LMI approach. J. AI Data Min.1(2), 75–87 (2013)
11. Hokayem, P.F., Spong, M.W.: Bilateral teleoperation: an his-torical survey. Automatica 42, 2035–2057 (2006)
12. Nuño, E., Basañez, L., Ortega, R.: Passivity-based controlfor bilateral teleoperation: a tutorial. Automatica 47, 485–495 (2011)
13. Chopra, N., Spong, M.W., Ortega, R., Barabanov, N.E.: Ontracking performance in bilateral teleoperation. IEEE Trans.Robot. 22(4), 861–866 (2006)
14. Namerikawa, T., Kawada, H.: Symmetric impedancematched teleoperation with position tracking. In: Proceed-ings of the 45th IEEE Conference on Decision and Control,pp. 4496–4501 (2006)
15. Nuño, E., Basañez, L., Ortega, R., Spong, M.W.: Posi-tion tracking for nonlinear teleoperators with variable time-delay. Int. J. Robot. Res. 28(7), 895–910 (2009)
16. Nuño, E., Ortega, R., Barabanov, N., Basañez, L.: A globallystable PD controller for bilateral teleoperators. IEEE Trans.Robot. 24(3), 753–758 (2008)
17. Nuño, E., Ortega, R., Basañez, L.: An adaptive controllerfor nonlinear bilateral teleoperators. Automatica 46(1), 155–159 (2010)
18. Polushin, I.G., Marquez, H.J.: Stabilization of bilaterallycontrolled teleoperators with communication delay: an ISSapproach. Int. J. Control 76(8), 858–870 (2003)
19. Chopra, N., Spong, M.W., Lozano, R.: Synchronization ofbilateral teleoperators with time delay. Automatica 44(8),2142–2148 (2008)
20. Chopra, N., Spong, M.W.: Passivity-based control of multi-agent systems. Advances in robot control, from everydayphysics to human-like movements, pp. 107–134. Springer,Berlin (2006)
21. Chopra, N., Spong, M.W.: On synchronization of networkedpassive systems with time delays and application to bilateralteleoperation. In: Proceedings of IEEE/SICE Annual Con-ference, pp. 3424–3429 (2005)
22. Lozano, R., Chopra, N.: Convergence analysis of bilateralteleoperation with constant human input. American ControlConference, pp. 1443–1448 . New York, USA (2007)
23. Kawada, H., Yoshida, K., Namerikawa, T.: Synchronizedcontrol for teleoperation with different configurations andcommunication delay. In: Proceedings of the 46th IEEEConference on Decision and Control, pp. 2546–2551 (2007)
24. Nocedal, J., Wright, J.: Numerical Optimization. SpringerSeries in Operations Research (1999)
25. Alfi, A., Khosravi, A.: Constrained nonlinear optimal con-trol via a hybrid BA-SD. Int. J. Eng. 25(3), 197–204 (2012)
26. Alfi, A.: PSO with adaptive mutation and inertia weight andits application in parameter estimation of dynamic systems.Acta Autom. 37(5), 541–549 (2011)
27. Alfi, A., Fateh, M.M.: Intelligent identification and controlusing improved fuzzy particle swarm optimization. ExpertSyst. Appl. 38, 12312–12317 (2011)
28. Modares, H., Alfi, A., Naghibi Sistani, M.B.: Parameter esti-mation of bilinear systems based on an adaptive particleswarm optimization. J. Eng. Appl. Artif. Intell. 23, 1105–1111 (2010)
29. Alfi, A., Fateh, M.M.: Identification of nonlinear systemsusing modified particle swarm optimization: a hydraulic sus-pension system. J. Veh. Syst. Dyn. 46(6), 871–887 (2011)
30. Alfi, A., Modares, H.: System identification and controlusing adaptive particle swarm optimization. Appl. Math.Model. 35, 1210–1221 (2011)
31. Darabi, A., Alfi, A., Kiumarsi, B., Modares, H.: Employ-ing adaptive PSO algorithm for parameter estimation of anexciter machine. ASME J. Dyn. Syst. Meas. Control 134(1),(2012). doi:10.1115/1.4005371
32. Balaram, B., Narayanan, M.D., Rajendrakumar, P.K.: Opti-mal design of multi-parametric nonlinear systems using aparametric continuation based Genetic Algorithm approach.Nonlinear Dyn. 67(4), 2759–2777 (2012)
33. Tenreiro Machado, J.A.: Optimal tuning of fractional con-trollers using genetic algorithms. Nonlinear Dyn. 62, 447–452 (2010)
34. Mokeddem, D., Khellaf, A.: Optimal feeding profile for afuzzy logic controller in a bioreactors using genetic algo-rithm. Nonlinear Dyn. 67(4), 2835–2845 (2012)
35. Solteiro Pires, E.J., Tenreiro Machado, J.A., de MouraOliveira, P.B., Boaventura Cunha, J., Mendes, L.: Particleswarm optimization with fractional-order velocity. Nonlin-ear Dyn. 61, 295–301 (2010)
36. Gao, Z., Liao, X.: Rational approximation for fractional-order system by particle swarm optimization. NonlinearDyn. 67(2), 1387–1395 (2012)
37. Tang, K.S., Man, K.F., Istepanian, R.S.H.: Teleoperationcontroller design using hierarchical genetic algorithm. In:Proceedings of the IEEE International Conference on Indus-trial Technology, vol. 1, pp. 707–711 (2000)
38. Talavatifard, H.A., Razi, K., Menhaj, M.B.: A self-tuningcontroller for teleoperation system using evolutionary learn-ing algorithms in neural networks. Comput. Intell. TheoryAppl. 38, 51–60 (2006)
123

H. Shokri-Ghaleh, A. Alfi
39. Kim, B.Y., Ahn, H.S.: Bilateral teleoperation systems usinggenetic algorithms. In: Proceedings of the IEEE Interna-tional Symposium on Computational Intelligence in Robot-ics and Automation, pp. 388–393 (2009)
40. Gál, L., Kóczy, L.T., Lovassy, R.: A novel version ofthe bacterial memetic algorithm with modified operatorexecution order. Óbuda University e-Bulletin 1(1), 25–34(2010)
41. Karaboga, D., Basturk, B.: A powerful and efficient algo-rithm for numeric optimization: artificial bee colony algo-rithm. J. Glob. Optim. 39(3), 459–471 (2007)
42. Karaboga, D., Akay, B.: A comparative study of artificialbee colony algorithm. Appl. Math. Comput. 214, 108–132(2009)
43. Atashpaz-Gargari, E., Lucas, C.: Imperialist competitivealgorithm: an algorithm for optimization inspired by impe-rialistic competition. IEEE Congress on Evolutionary Com-putation, 25–28 Sep., pp. 4661–4667 (2007)
44. Simon, D.: Biogeography-based optimization. IEEE Trans.Evol. Comput. 12(6), 702–713 (2008)
45. Rajabioun, R.: Cuckoo optimization algorithm. Appl. SoftComput. 11, 5508–5518 (2011)
46. Spong, M.W., Hutchinson, S., Vidyasagar, M.: Robot Mod-eling and Control. Wiley, New York (2005)
47. Chopra, N., Spong, M.W.: Adaptive coordination controlof bilateral teleoperators with time delay. In: Proceedingsof the 43th IEEE Conference on Decision and Control,pp. 2546–2551 (2004)
48. Coelho, L., Afonso, L., Alotto, P.: A modified imperialistcompetitive algorithm for optimization in electromagnetic.IEEE Trans. Magn. 48(2), 579–582 (2012)
49. Lucas, C., Nasiri-Gheidari, Z., Tootoonchian, F.: Applica-tion of an imperialist competitive algorithm to the designof a linear induction motor. Energy Convers. Manag. 51(7),1407–1411 (2010)
50. Kang, F., Li, J., Ma, Z.: Rosenbrock artificial bee colonyalgorithm for accurate global optimization of numericalfunctions. Inf. Sci. (11), S0020–0255, 00198–8 (2011).doi:10.1016/j.ins.2011.04.024
51. Garcia-Valdovinos, L.G., Parra-Vega, V., Mendez-Iglesias,J.A., Arteaga, M.A.: Cartesian sliding PID force/positioncontrol for transparent bilateral teleoperation. In: Proceed-ings 31st Annual Conference of IEEE Industrial Electronics,pp. 1979–1985 (2005)
52. Khalil, H.: Nonlinear Systems. Prentice Hall, USA (2002)
123
Copyright © 2022 FDOKUMEN




















