A Hybrid Particle Swarm Optimization Algorithm for the Redundancy Allocation Problem

University of Sharjah College of Engineering
Electrical and Computer Engineering Department
Optimal Model Reduction Using Genetic Algorithms
and Particle Swarm Optimization
by
REEM IZZELDIN SALIM
Supervisor
Professor Maamar Bettayeb
Program: Electrical and Electronics Engineering
16-04-2009

Optimal Model Reduction Using Genetic Algorithms
and Particle Swarm Optimization
by
Reem Izzeldin Salim
A thesis submitted in partial fulfillment of the requirements for the degree of Master of
Science in the Department of Electrical and Computer Engineering, University of Sharjah
Approved by:
Maamar Bettayeb ……………………………………………………. Chairman
Professor of Electrical and Electronics Engineering, University of Sharjah
Abdulla Ismail Abdulla ………………………………………………… Member
Professor of Electrical Engineering, United Arab Emirates University
Karim Abed Meraim ………………………………………………… Member
Associate Professor of Electrical and Electronics Engineering, University of Sharjah
Mohamed Saad ……………………………………………………… Member
Assistant Professor of Computer Engineering, University of Sharjah
16-04-2009

To my parents
“O Lord, bestow on them the Mercy even as they cherished me in childhood.” (The Holy Quran 17: 24)
And to my dear husband, Faris

I
Acknowledgement
ll praise and thanks are due to Almighty Allah, Most Gracious; Most Merciful,
for the immense mercy which have resulted in accomplishing this research. May
peace and blessings be upon prophet Muhammad (PBUH), his family and his companions.
I would like to thank my thesis Supervisor, Professor Maamar Bettayeb for his
continuous support and guidance throughout my research. Without his substantial knowledge and
experience, I would not have been able to complete this work.
I would like to thank my examining committee, Professor Abdulla Ismail Abdulla, Dr.
Karim Abed Meraim and Dr. Mohamed Saad for taking the time to review my study and for their
valuable input.
I would also like to acknowledge Mr. Mohammed Ubaid for taking the time to help me
overcome some of the many difficulties I encountered using MATLAB.
A

II
I would also like to express my sincere gratitude to my dear parents and my husband
Faris for being there for me in good and bad. They have supported me in everything that I have
endeavored, and their continuous encouragement always lifted up my self confidence whenever I
encountered problems. Words fall short in conveying my gratitude towards them. A prayer is the
simplest means I can repay them.
Finally, I would like to thank everybody who was important to the successful realization
of this thesis, and I apologize for not mentioning everyone personally.

III
Table of Contents
Acknowledgement ..................................................................................................................... I
Table of Contents ...................................................................................................................... III
List of Tables ........................................................................................................................... VIII
List of Figures ............................................................................................................................ X
Abstract ..................................................................................................................................... XV
Chapter 1: Introduction ........................................................................................................... 1
1.1 Model Reduction ..................................................................................................... 5
1.2 Purpose of the Study ................................................................................................ 6
1.3 Study Method .......................................................................................................... 7

IV
Chapter 2: Literature Review .................................................................................................. 9
2.1 Classical Model Reduction ...................................................................................... 9
2.2 Optimal Model Reduction ..................................................................................... 10
2.2.1 H∞ Norm Model Reduction ......................................................................... 14
2.2.2 H2 Norm Model Reduction ....................................................................... 16
2.2.3 L1 Norm Model Reduction .......................................................................... 18
2.3 Previous Studies ...................................................................................................... 19
Chapter 3: Evolutionary Algorithms ...................................................................................... 23
3.1 Genetic Algorithms ................................................................................................. 24
3.2 Particle Swarm Optimization .................................................................................. 27
Chapter 4: H2 Norm Model Reduction ................................................................................... 31
4.1 GA Approach Results .............................................................................................. 35
4.2 PSO Approach Results ............................................................................................ 40
4.3 Comparative Study of the Two Approaches ........................................................... 44
4.3.1 Steady State Errors and Norms .................................................................. 46
4.3.2 Impulse Responses and Initial Values ........................................................ 47
4.3.3 Step Responses ........................................................................................... 50
4.3.4 Frequency Responses ................................................................................. 52
4.4 GA and PSO H2 Model Reduction Approaches versus Previous Studies ................ 55
4.4.1 Maust and Feliachi ...................................................................................... 55
4.4.2 Yang, Hachino, and Tsuji ............................................................................ 56

V
Chapter 5: H∞ Norm Model Reduction ................................................................................... 65
5.1 GA Approach Results .............................................................................................. 68
5.2 PSO Approach Results ............................................................................................ 69
5.3 Comparative Study of the Two Approaches ........................................................... 70
5.3.1 Steady State Errors and Norms .................................................................. 72
5.3.2 Impulse Responses and Initial Values ........................................................ 73
5.3.3 Step Responses ........................................................................................... 76
5.3.4 Frequency Responses ................................................................................. 78
5.4 PSO H∞ Norm Model Reduction Approach versus Previous Studies ..................... 80
Chapter 6: L1 Norm Model Reduction ................................................................................... 84
6.1 GA Approach Results .............................................................................................. 85
6.2 PSO Approach Results ............................................................................................ 86
6.3 Comparative Study of the Two Approaches ........................................................... 87
6.3.1 Steady State Errors and Norms .................................................................. 88
6.3.2 Impulse Responses and Initial Values ........................................................ 99
6.3.3 Step Responses ........................................................................................... 93
6.3.4 Frequency Responses ................................................................................. 95
6.4 GA and PSO L1 Model Reduction Approaches versus Previous Studies ................ 97
Chapter 7: Hybrid Norm Model Reduction ........................................................................... 99
7.1 Hybrid between H2 and H∞ Norms ......................................................................... 100
7.1.1 GA Approach Results ................................................................................. 100

VI
7.1.2 PSO Approach Results ................................................................................101
7.1.3 Comparative Study of the Two Approaches ................................................102
7.1.3.1 Steady State Errors and Norms ......................................................102
7.1.3.2 Impulse Responses and Initial Values ............................................103
7.1.3.3 Step Responses ...............................................................................106
7.1.3.4 Frequency Responses ......................................................................108
7.2 Hybrid between L1, H2 and H∞ Norms ................................................................... 110
7.2.1 GA Approach Results ..................................................................................111
7.2.2 PSO Approach Results ................................................................................112
7.2.3 Comparative Study of the Two Approaches ................................................113
7.2.3.1 Steady State Errors and Norms ......................................................113
7.2.3.2 Impulse Responses and Initial Values .......................................... 114
7.2.3.3 Step Responses .............................................................................. 117
7.2.3.4 Frequency Responses .....................................................................119
7.3 Comparison between the Two Hybrid Norms ........................................................ 121
Chapter 8: Conclusion & Future Work ................................................................................ 123
References ..................................................................................................................................130
List of Accepted/Submitted Papers from Thesis Work ........................................................ 144

VII
Appendices ................................................................................................................................ i
Appendix 1: Thesis MATLAB Code ...................................................................................... ii
Appendix 2: GA Functions ..................................................................................................... ix
2.1 L1 Norm Function .............................................................................................. ix
2.2 H2 Norm Function .............................................................................................. x
2.3 H∞ Norm Function ............................................................................................. x
2.4 Hybrid Norm Function ...................................................................................... xi
Appendix 3: PSO Functions .................................................................................................. xiii
3.1 L1 Norm Function ............................................................................................. xiii
3.2 H2 Norm Function ............................................................................................ xiv
3.3 H∞ Norm Function ............................................................................................ xv
3.4 Hybrid Norm Function ...................................................................................... xv
3.5 H2 Norm with Time-Delay Function ............................................................... xvi

VIII
List of Tables
Table 4.1 Wilson: GA Performance for Different Population Sizes ................................. 39
Table 4.2 Wilson: PSO Performance for Different Swarm Sizes ...................................... 43
Table 4.3 Wilson: SSE and Norms of the H2 Norm MR approach ................................... 46
Table 4.4 Boiler: SSE and Norms of the H2 Norm MR approach ..................................... 46
Table 4.5 H2 Norms of Yang et al.’s 6th order example ..................................................... 58
Table 5.1 Wilson: SSE and Norms of the H∞ Norm MR approach ................................... 72
Table 5.2 Boiler: SSE and Norms of the H∞ Norm MR approach .................................... 72
Table 5.3 Weighted H∞ Norm Model Reduction Results .................................................. 83
Table 6.1 Wilson: SSE and Norms of the L1 Norm MR approach .................................... 89

IX
Table 6.2 Boiler: SSE and Norms of the L1 Norm MR approach ..................................... 89
Table 7.1 Wilson: SSE and Norms of the first Hybrid Norm MR approach .......................102
Table 7.2 Boiler: SSE and Norms of the first Hybrid Norm MR approach ...................... 102
Table 7.3 Wilson: SSE and Norms of the second Hybrid Norm MR approach .................113
Table 7.4 Boiler: SSE and Norms of the second Hybrid Norm MR approach ...................113
Table 8.1 Summary of the Wilson System Results ........................................................... 126
Table 8.2 Summary of the Boiler System Results ............................................................ 127

X
List of Figures
Figure 3.1 Roulette Wheel ................................................................................................... 26
Figure 3.2 Genetic Algorithm Flowchart ............................................................................ 27
Figure 4.1 Wilson: Convergence Rate of the GA for different population sizes ................ 39
Figure 4.2 Wilson: Convergence Rate of the PSO for different swarm sizes ..................... 43
Figure 4.3 Wilson: Convergence Rate of GA and PSO ...................................................... 44
Figure 4.4 Boiler: Convergence Rate of GA and PSO ....................................................... 45
Figure 4.5 Wilson: Impulse Responses of the H2 Norm MR approach .............................. 47
Figure 4.6 Wilson: Initial Values of the H2 Norm MR approach ....................................... 48
Figure 4.7 Boiler: Impulse Responses of the H2 Norm MR approach ................................ 49

XI
Figure 4.8 Boiler: Initial Values of the H2 Norm MR approach ......................................... 50
Figure 4.9 Wilson: Step Responses of the H2 Norm MR approach .................................... 51
Figure 4.10 Boiler: Step Responses of the H2 Norm MR approach ..................................... 52
Figure 4.11 Wilson: Frequency Responses of the H2 Norm MR approach .......................... 53
Figure 4.12 Boiler: Frequency Responses of the H2 Norm MR approach ............................ 54
Figure 4.13 Yang: Impulse Responses of the 1st order reduced models ....................................... 59
Figure 4.14 Yang: Step Responses of the 1st order reduced models ............................................ 59
Figure 4.15 Yang: Frequency Responses of the 1st order reduced models ................................... 60
Figure 4.16 Yang: Impulse Responses of the 2nd order reduced models ...................................... 60
Figure 4.17 Yang: Step Responses of the 2nd order reduced models ........................................... 61
Figure 4.18 Yang: Frequency Responses of the 2nd order reduced models .................................. 61
Figure 4.19 Yang: Impulse Responses of the 3rd order reduced models ...................................... 62
Figure 4.20 Yang: Step Responses of the 3rd order reduced models ............................................ 62
Figure 4.21 Yang: Frequency Responses of the 3rd order reduced models ................................... 63
Figure 4.22 Yang: Impulse Responses of the 4th order reduced models ....................................... 63
Figure 4.23 Yang: Step Responses of the 4th order reduced models ............................................ 64
Figure 4.24 Yang: Frequency Responses of the 4th order reduced models ................................... 64

XII
Figure 5.1 Wilson: Convergence Rate of GA and PSO ...................................................... 71
Figure 5.2 Boiler: Convergence Rate of GA and PSO ....................................................... 71
Figure 5.3 Wilson: Impulse Responses of the H∞ Norm MR approach .............................. 73
Figure 5.4 Wilson: Initial Values of the H∞ Norm MR approach ....................................... 74
Figure 5.5 Boiler: Impulse Responses of the H∞ Norm MR approach ............................... 75
Figure 5.6 Boiler: Initial Values of the H∞ Norm MR approach ........................................ 76
Figure 5.7 Wilson: Step Responses of the H∞ Norm MR approach ................................... 77
Figure 5.8 Boiler: Step Responses of the H∞ Norm MR approach ..................................... 78
Figure 5.9 Wilson: Frequency Responses of the H∞ Norm MR approach .......................... 79
Figure 5.10 Boiler: Frequency Responses of the H∞ Norm MR approach ........................... 80
Figure 6.1 Wilson: Convergence Rate of GA and PSO ...................................................... 87
Figure 6.2 Boiler: Convergence Rate of GA and PSO ....................................................... 88
Figure 6.3 Wilson: Impulse Responses of the L1 Norm MR approach ............................... 90
Figure 6.4 Wilson: Initial Values of the L1 Norm MR approach ........................................ 91
Figure 6.5 Boiler: Impulse Responses of the L1 Norm MR approach ................................ 92
Figure 6.6 Boiler: Initial Values of the L1 Norm MR approach ......................................... 93
Figure 6.7 Wilson: Step Responses of the L1 Norm MR approach .................................... 94

XIII
Figure 6.8 Boiler: Step Responses of the L1 Norm MR approach ...................................... 95
Figure 6.9 Wilson: Frequency Responses of the L1 Norm MR approach ........................... 96
Figure 6.10 Boiler: Frequency Responses of the L1 Norm MR approach ............................ 97
Figure 7.1 Wilson: Impulse Responses of the first Hybrid Norm MR approach ................ 103
Figure 7.2 Wilson: Initial Values of the first Hybrid Norm MR approach ......................... 104
Figure 7.3 Boiler: Impulse Responses of the first Hybrid Norm MR approach ................. 105
Figure 7.4 Boiler: Initial Values of the first Hybrid Norm MR approach .......................... 106
Figure 7.5 Wilson: Step Responses of the first Hybrid Norm MR approach ..................... 107
Figure 7.6 Boiler: Step Responses of the first Hybrid Norm MR approach ....................... 108
Figure 7.7 Wilson: Frequency Responses of the first Hybrid Norm MR approach ............. 109
Figure 7.8 Boiler: Frequency Responses of the first Hybrid Norm MR approach .............. 110
Figure 7.9 Wilson: Impulse Responses of the second Hybrid Norm MR approach ............ 114
Figure 7.10 Wilson: Initial Values of the second Hybrid Norm MR approach .................... 115
Figure 7.11 Boiler: Impulse Responses of the second Hybrid Norm MR approach ............ 116
Figure 7.12 Boiler: Initial Values of the second Hybrid Norm MR approach ..................... 117
Figure 7.13 Wilson: Step Responses of the second Hybrid Norm MR approach ................. 118
Figure 7.14 Boiler: Step Responses of the second Hybrid Norm MR approach .................. 119

XIV
Figure 7.15 Wilson: Frequency Responses of the second Hyb. Norm MR approach ............120
Figure 7.16 Boiler: Frequency Responses of the second Hyb. Norm MR approach ..............121

XV
Abstract
he mathematical modeling of most physical systems, such as telecommunication
systems, transmission lines and chemical reactors, results in complex high order
models. The complexity of the models imposes major difficulties in analysis, simulation and
control designs. Model reduction helps to reduce these difficulties. Several analytical model
reduction techniques have been proposed in the literature over the past few decades, to
approximate high order linear dynamic systems. However, most of the optimal techniques lead to
computationally demanding, time consuming, iterative procedures that usually result in non-
robustly stable models with poor frequency response resemblance to the original high order
model in some frequency ranges. Genetic Algorithms (GA) and Particle Swarm Optimization
(PSO) methods have proved to be excellent optimization tools. Therefore, the aim of this thesis
is to use GA and PSO to solve complex model reduction problems with no available analytic
solutions, and help obtain globally optimized reduced order models.
T

XVI
Keywords: Model Reduction, Optimal Approximation, L1 Norm, H2 Norm, H∞ Norm,
Hybrid Norm, Evolutionary Algorithm, Genetic Algorithm, Particle Swarm Optimization, Global
Solution.

Chapter 1
Introduction
he mathematical modeling of most physical systems, such as telecommunication
systems, transmission lines and chemical reactors, results in infinite dimensional
models. Using engineering tools we can still roughly represent those systems with approximate
finite dimensional models (Al-Saggaf & Bettayeb, 1993).
However, complex large-scale systems usually require high dimensional models to well-
represent them. Analysis, simulation and design methods based on this high order model may
eventually lead to complicated control strategies requiring very complex logic or large amounts
of computation (Bettayeb, 1981).
Model Reduction is a branch of systems and control theory, which studies properties of
dynamical systems in order to reduce their complexity, while preserving (to the possible extent)
T

2
their input-output behavior (Massachusetts Institute of Technology, 2009). Specifically, the use
of low order models lead to the following desired properties (Bettayeb, 1981):
1. Simple design and analysis: Feedback design of high order models often lead to high
dimensional control laws which then result in complex feedback structures. These
structures are simplified if one starts with reduced models resulting in low order control
laws. Also, in identification problems, one is asked to derive a preferably low order
model given noisy input output data.
2. Computational advantage: In linear quadratic control and estimation problems, the
computation of the optimal controller and observer amount to solving a quadratic matrix
Ricatti equation. The size of this matrix is precisely the order of the model. Thus, the
computational requirements on simplified models will be much lower since computation
time and complexity on this quadratic equation rise at a rate greater than linearly with the
problem dimension.
3. Simplicity of simulation: Simulation of models can be used in understanding some
properties of the system. Very often simulation of lower order models adequately
displays the important dynamics of the physical system. In real time control of complex
systems, simple simulation is often necessary. It is also desirable for simple hardware
implementation of the model.
Model Reduction is also important in filter design. For example, one is asked to
approximately realize a non-realizable ideal filter by low order filters (Bettayeb, 1981).

3
Another important consideration is the quality of the reduced order model. The accuracy
measure of the approximation should in some concrete way take into consideration the difference
in behavior between the original system and the reduced order model (Bettayeb, 1981).
Different Norms are used for the formulation of the model reduction problem. Of course,
one has to be aware of the following facts (Bettayeb, 1981):
1. The use of different norms gives rise to different approximations. A good approximation
in one norm is not necessarily good in another norm. Various norms are therefore chosen
depending on each individual application.
2. Close approximations based on time domain criteria do not necessarily translate into
good frequency domain approximations.
The Model Reduction problem is a tradeoff between two conflicting desirable objectives
(Bettayeb, 1981):
1. To derive from the high order system a model as simple (low order) as possible
(complexity).
2. The low order model is reasonably close to the original system (accuracy).
Assume one has a device, and that (using finite-difference discretization or any other
modeling technique) its description is obtained in the form of a differential equation, or a transfer
function. Usually, this will result in a system of a very high order, evidently redundant for
representing some properties of interest. Model Reduction is used to create the smallest possible

4
model while preserving the system’s input-output behavior (Massachusetts Institute of
Technology, 2009).
For example, consider a transmission line. We can obtain its dynamical model by
discretizing its length, representing each small piece as a small resistor, inductor plus capacitor to
the ground, and then create a description using nodal voltage analysis. By solving this system for
any given input, the voltage distribution at any given point of the line will be known. Assume
that we are not interested in knowing the exact distribution of the voltage along the line, but
rather interested in how the signal is transmitted through the line, i.e., we need to know the
dependence of the voltage and the current at one end of the line on the voltage and the current at
the other end of the line. In order to simulate this line efficiently, especially if this line is part of
some complex circuit, a simplified representation of this line is required. Model Reduction
produces this simplified representation (Massachusetts Institute of Technology, 2009).
Historically, system modeling has been something of an art, requiring either special
knowledge of the system being considered, or a certain “intuition” into the modeling process
itself. The resulting system models may be extremely complex. For example, in the field of
Computational Fluid Dynamics (CFD), flow systems are sometimes described by literally
millions of dynamic state equations. There exist many techniques in practice for reducing the
complex models and creating a useful low order system model. Regardless of which modeling
approach is used, the process always yields some modeling error (Hartley, et al, 1998).

5
1.1 Model Reduction:
Considering the following general state space model representation of a single-input-
single-output (SISO) time-invariant linear continuous time system:
(1.1)
where x(t) is the state, u(t) is the input, and y(t) is the output. This state space model can be
represented by the following nth order transfer function:
(1.2)
The aim of optimal model reduction is to obtain a reduced order state space model
representation or a reduced order transfer function of the system that well represents the original
system:
(1.3)
(1.4)
In this thesis, three different model reduction problems will be investigated using Genetic
Algorithms (GA) and Particle Swarm Optimization (PSO). These problems are H2 norm, H∞
norm and L1 norm Model Reduction.
The H∞ norm is defined as:
6
∞ max | |
max . (1.5)
where:
E(s) = G(s) – Gr(s) (1.6)
and the H2 norm is defined as:
| | ∞∞ (1.7)
The L1 norm on the other hand is defined as:
| |∞ (1.8)
where e(t) is the impulse response difference between the original system and the reduced
system:
(1.9)
1.2 Purpose of the Study:
The models of many modern control systems are of high order and thus are very
complex. This complexity will impose difficulties in analysis, simulation and control designs.
Performing model reduction will help reduce those difficulties.
7
In model reduction, it is important that the reduced order model provides close
approximation to the original high order system for different types of inputs, while yielding the
minimum steady state error and preserving the stability characteristics of the original high order
system.
Several analytical model reduction techniques have been proposed in the literature over
the past few decades. However, most of the optimal techniques follow time-consuming, iterative
procedures that usually result in non-robustly stable models with poor frequency response
resemblance to the original high order model in some frequency ranges.
Genetic Algorithms (GA) and Particle Swarm Optimization (PSO) methods have proved
to be excellent optimization tools in the past few years. The use of such search-based
optimization algorithms in Model Reduction ensures that all the Model Reduction objectives are
realized with minimal computational effort. Therefore, the aim of this thesis will be to use GA
and PSO to solve model reduction problems, and help obtain a globally optimized nominal
model. The thesis will also compare the results of the two approaches with the analytical
solutions obtained by other researchers in previous works and draw a conclusion.
1.3 Study Method:
This study uses MATLAB 7.0 to build the GA and PSO model reduction approaches
based on H2 norm, H∞ norm and L1 norm1. MATLAB 7.0’s embedded GA toolbox was used to
build the GA model reduction approach. A PSO toolbox on the other hand was not introduced 1 All MATLAB Codes are presented in the Appendices.

8
into MATLAB yet. However, Birge (2003) introduced a reliable toolbox (PSOt) that has been
used by many researchers to implement and study their different PSO applications. Revision 3.3
of the PSOt toolbox, dated 18/02/2006, was used to build the proposed PSO model reduction
approach of this thesis work with slight modifications.
The GA and PSO approaches will be tested on different original models with different
orders, in order to obtain optimally reduced models. The results of both approaches will be
compared to results obtained by other researchers in the area. The two approaches will also be
compared to one another in order to conclude which of the two approaches yields better results.
The comparison process will be based on: impulse response, step response, frequency response,
steady state values, initial values, H2 norm, H∞ norm and L1 norm.

Chapter 2
Literature Review
odel reduction has been an attractive research area in the past few decades.
This chapter summarizes the classical and optimal model reduction approaches
as well as the previous model reduction studies that used Genetic Algorithms and Particle Swarm
Optimization.
2.1 Classical Model Reduction:
Model Reduction started in 1966 when Davison (1966, 1967) presented “The Modal
Analysis” approach using state space techniques. Chidambara (1967, 1969) then offered several
modifications to Davison’s approach. Later on several researchers started to add their imprints in
the area when, Chen and Shieh (1968) used frequency domain expansions; Gibilaro and Lees
(1969) matched the moments of the impulse response; Hutton and Friedland (1975) used the
M

10
Routh approach for high frequency approximation which was modified by Langholz and
Feinmesser (1978); and then Pinguet (1978) showed that all those methods have state space
reformulations.
2.2 Optimal Model Reduction:
The model reduction approaches cited in the previous section did not consider optimality.
It was not until 1970, that optimal model reduction was considered by Wilson (1970, 1974). He
used an H2 norm model reduction approach based on the minimization of the integral squared
impulse response error between the full and reduced order models.
Given an nth order state space representation of a system in the form:
(2.1)
where x is an n × 1 vector, u is a p × 1 vector and y is an m × 1 vector, Wilson aimed to find a
reduced order state space representation of the system of order r, where m < r < n:
(2.2)
The following function represents Wilson’s cost function to be minimized:
(2.3)
where he sets Q to be the m × m identity matrix, and e(t) is the error signal:

11
(2.4)
By substituting eq. (2.4) in eq. (2.3):
(2.5)
where
(2.6)
Minimization of eq. (2.5) leads to the following Lyapunov equations:
0 (2.7)
0 (2.8)
Where R and P are unique positive definite solutions of these linear Lyapunov equations and
hence can be solved in closed form:
00 (2.9)
If P and R are partitioned compatibly with F as:
(2.10)
Then the necessary conditions for optimality gives:
(2.11)

12
(2.12)
(2.13)
Note that eqs. (2.7) and (2.8) are nonlinear in the unknown reduced order matrices Ar, Br
and Cr. This non-linearity is the severe drawback of Wilson’s method. The method is
computationally demanding, and requires iterative minimization algorithms which suffer from
many difficulties such as the choice of starting guesses, convergence, and multiple local minima.
In the early 1980s; Obinata and Inooka (1976, 1983) and Eitelberg (1981) in other
approachs, minimized the equation error that leads to closed form solutions. The L1-norm
minimization approach was then presented by El-Attar and Vidyasagar (1978).
The classical approach to model reduction dealt only with eigenvalues. However, in
1981, Moore (1981) published a paper presenting a revolutionary way of looking at model
reduction by showing that the ideal platform to work from is that when all states are as
controllable as they are observable. This gave birth to “Balanced Model Reduction”, where the
concept of dominance is no longer associated with eigenvalues, but rather with the degree of
controllability and observability of a given state.
Moore’s approach aims at changing the form of the system’s state space model
representation, by the use of a certain transformation matrix, into a balanced model with the
transformed states being as controllable as they are observable, and ordered from strongly
controllable and observable to weakly controllable and observable.

13
Since the output depends on both the controllability and the observability of a state; the
states which are weakly controllable and observable will have little effect on the output, and
thus, discarding them will not affect the output very much. This is what motivated Moore to
develop his approach. Pernebo and Silverman (1982) showed that the stability of this reduced
model is assured if the original system was also stable. However, Moore’s approach still suffered
from steady state errors (Al-Saggaf & Bettayeb, 1993).
Hankel-norm reduction which was studied by Silverman and Bettayeb (1980), Bettayeb,
Silverman and Safonov (1980), Kavranoğlu and Bettayeb (1982, 1993a), and Glover (1984) on
the other hand is optimal. It has a closed form solution and is computationally simple employing
standard matrix software (Al-Saggaf & Bettayeb, 1993). The singular values of the Hankel
Matrix are called the Hankel Singular Values (HSV) of the system G(z) and they are defined as
follows:
/ (2.14)
where P and Q are the controllability and observability gramians respectively:
(2.15)
(2.16)
The Hankel norm of a transfer function G(z), denoted by is defined to be the
largest HSV of G(z):
(2.17)

14
The balanced model reduction realizations and the optimal Hankel-norm approximations
changed the status of model reduction dramatically. Those two techniques made it possible to
predict the error between the frequency responses of the full and the reduced order models.
2.2.1 H∞ Norm Model Reduction:
Starting in 1993, Kavranoğlu and Bettayeb (1993b) studied the H∞ norm approximation
of a given stable, proper, rational transfer function by a lower order stable, proper, rational
transfer function. They found that the H∞ norm model reduction problem can be converted into a
Hankel norm model reduction problem, and therefore they based their approach on this finding.
A comparison between Hankel norm approximation and H∞ norm model reduction in the
H∞ norm sense was conducted in (Bettayeb & Kavranoğlu, 1993). Bettayeb and Kavranoğlu
(1993) found that the H∞ approximation method can be much better or, in some cases,
comparable to the Hankel norm approximation scheme.
Kavranoğlu and Bettayeb (1993c) then studied Hankel norm model reduction, and H∞
approximation schemes where they explored some further properties related to the H∞ norm. In
1994, they presented a simple state-space suboptimal L∞ norm Model reduction computational
algorithm Kavranoğlu and Bettayeb (1994).
In 1995, Kavranoğlu and Bettayeb (1995a) developed a suboptimal computational
scheme for the problem of constant L∞ approximation of complex rational matrix functions,
based on balanced realization for unstable systems. They also derived an L∞ error bound for
unstable systems and obtained optimal solution for a class of symmetric systems.

15
Kavranoğlu and Bettayeb (1995b, 1996), studied the L∞ norm optimal simultaneous
system approximation problem and explored various Linear Matrix Inequality (LMI) based
approaches to solve the simultaneous problem (Kavranoğlu, Bettayeb & Anjum, 1996). On the
other hand, L∞ norm constant approximation of unstable systems was studied in (Kavranoğlu &
Bettayeb, 1993d).
Bettayeb and Kavranoğlu (1994) also presented an overview on H∞ filtering, estimation,
and deconvolution approaches, where they considered the problem of reduced order H∞
estimation filter design. They then presented an iterative scheme for rational H∞ approximation
(Bettayeb and Kavranoğlu, 1995).
Kavranoğlu, Bettayeb and Anjum (1995) also investigated L∞ norm approximation of
simultaneous muitivariable systems by a rational matrix function with desired number of stable
and unstable poles.
Sahin, Kavranoğlu and Bettayeb (1995) presented a case study where they applied four
different model reduction schemes, namely, balanced truncation, singular perturbation balanced
truncation, Hankel norm approximation, and H∞ norm approximation; to a two-dimensional
transient heat conduction problem.
Assunção and Peres (1999a, 199b) addressed the H∞ model reduction problem for
uncertain discrete time systems with convex bounded uncertainties and proposed a branch and
bound algorithm to solve the H2 norm model reduction problem for continuous time linear
systems.

16
Ebihara and Hagiwara (2004) noted that the lower bounds of the H∞ Model Reduction
problem can be analyzed by using Linear Matrix Inequality (LMI) related techniques, and thus,
they reduce the order of the system by the multiplicity of the smallest Hankel Singular value
which showed that the problem is essentially convex and the optimal reduced order models can
be constructed via LMI optimization.
Wu and Jaramillo (2003) investigated a frequency-weighted optimal H∞ Model
Reduction problem for linear time-invariant (LTI) systems. Their approach aimed to minimize
the H∞ norm of the frequency-weighted truncation error between a given linear-time-invariant
(LTI) system and its lower order approximation. They proposed a model reduction scheme based
on Cone Complementarity Algorithm (CCA) to solve their H∞ Model Reduction problem.
Xu et al. (2005) studied H∞ Model Reduction for 2-D Singular Roesser Models. However
more recently, Zhang et al. (2008, 2009) investigated the H∞ Model Reduction problem for a
class of discrete-time Markov Jump Linear Systems (MJLS) with partially known transition
probabilities and for switched linear discrete-time systems with polytopic uncertainties.
2.2.2 H2 Norm Model Reduction:
Modern H2 Model Reduction on the other hand was first studied in 1970 by Wilson
(1970). For earlier classical least squares model reduction, see (Al-Saggaf & Bettayeb, 1981 and
references therein). Hyland and Bernstein (1985) used optimal projection to derive H2 reduced
models. Yan and Lam (1999a) proposed an H2 optimal model reduction approach that uses
orthogonal projections to reduce the H2 cost over the Stiefel manifold so that the stability of the

17
reduced order model is assured. Then they studied the problem of model reduction in the
multivariable case using orthogonal projections and manifold optimization techniques (Yan &
Lam, 1999b).
Moor, Overschee and Schelfhout (1993) investigated the H2 Model Reduction problem
for SISO systems. They used Lagrange Multipliers to derive a set of nonlinear equations and
analyzed the problem both in time domain and in z-domain and derived an H2 Model Reduction
algorithm that is inspired by inverse iterations.
Ge et al. (1993, 1997) studied the H2 optimal Model Reduction problem with an H∞
constraint. They proposed several approaches based on Homotopy methods to solve the H2/H∞
optimal Model Reduction problem.
Assunção and Peres (1999a, 1999b) addressed the H2 model reduction problem for
uncertain discrete time systems with convex bounded uncertainties and proposed a branch and
bound algorithm to solve the H2 norm model reduction problem for continuous time linear
systems.
Huang, Yan and Teo (2001) proposed a globally convergent H2 model reduction
algorithm in the form of an ordinary differential equation. Then, Marmorat et al. (2002) proposed
an H2 approximation approach using Schur parameters. An H2 optimal model reduction case
study is given in (Peeters, Hanzon & Jibetean, 2003).
Kanno (2005) proposed a heuristic algorithm that helps solve the suboptimal H2 Model
Reduction problems for continuous time and discrete time MIMO systems by means of Linear

18
Matrix Inequalities (LMIs). Gugercin, Antoulas and Beattie (2006) addressed the optimal H2
approximation of a stable single-input-single-output large scale dynamical system.
Beattie and Gugercin (2007) then proposed an H2 model reduction technique, based on
Krylov method, suitable for dynamical systems with large dimension.
More recently, Dooren, Gallivan and Absil (2008) considered the problem of
approximating a p × m rational transfer function H(s) of high degree by another p × m rational
transfer function Ĥ(s) of much smaller degree. They derived the gradients of the H2 norm of the
approximation error and showed how stationary points can be described via tangential
interpolation. Anic (2008) then presented a Master thesis in which he investigated an
interpolation-based approach to the weighted H2 Model Reduction problem.
2.2.3 L1 Norm Model Reduction:
Starting in 1977, El-Attar and Vidyasagar (1977, 1978) presented new procedures for
model reduction based on interpreting the system impulse response (or transfer function) as an
input-output map.
Hakvoort (1992) noted that in L1 robust control design, model uncertainty can be
handled if an upper-bound on the L1 Norm of the model error is known. Hakvoort presented a
new L1 Norm optimal model reduction approach resulting in a nominal model with minimal
upper-bound on the L1 Norm of the error.

19
Sebakhy and Aly (1998) presented a model reduction approach used to design reduced
order discrete time models based on L1, L2 and L∞ Norms.
Recently in 2005, Li et al. (2005a, 2005b) investigated the problem of robust L1 model
reduction for linear continuous time delay systems with parameter uncertainties.
The main problem with the above analytical optimization techniques is that they result in
non-linear equations in the parameters of the reduced order model. In order to solve those non-
linear equations, one will have to go through computationally demanding iterative minimization
algorithms, that suffer from many problems such as the choice of starting guesses, convergence,
and multiple local minima, not to mention the huge amount of time it demands to reach a
solution (Al-Saggaf & Bettayeb, 1993).
2.3 Previous Studies:
Model reduction has caught the attention of many researchers in the past few decades.
However, most of the existing work relies on tedious analytical solution methods. Minimal work
has been done on some aspects of model reduction using Genetic Algorithms and almost no
work at all has been done on model reduction using Particle Swarm Optimization.
Tan and Li (1996) developed a Boltzmann learning enhanced GA based method to solve
L∞ identification and model reduction problems, and obtain a globally optimized nominal model
and an error bounding function for additive and multiplicative uncertainties. They used their GA
to identify 2nd and 3rd order discrete nominal models for a 4th order discrete plant of an industrial

20
heat exchanger. Comparing the frequency responses of the original plant with the two GA
defined models; the GA results were proven to give a good fitting over the frequency range
concerned and to outperform other techniques yielding the smallest L∞ norm errors.
In optimal model reduction, the system matrices of a linear reduced order state-space
model are obtained by solving nonlinear Riccati equations, the “projection equations” for which
the solution is a time consuming, iterative procedure. Maust and Feliachi (1998) used a GA to
perform the optimization, based on the following L2 and L1 norms.
(2.18)
| |∞ (2.19)
where the error e(t) was defined in eq. (1.9), Q = QT is a symmetric positive semi-definite
weighting matrix assigning relative importance of tracking each output accurately. And w is a
column vector assigning relative importance to outputs.
They managed to prove that their GA-based model reduction approach outperforms
optimal aggregation model reduction.
Hsu and Yu (2004) noted that model reduction of uncertain interval systems based on
variants of the Routh approximation methods usually resulted in a non-robustly stable model
with poor frequency response resemblance to the original model. However, they proposed a GA
approach to derive a reduced model for the original system based on frequency response
resemblance, to improve system performance. The Bode envelope of their GA reduced model
outperformed the reduced models derived by existing analytic methods. Furthermore, the RMS

21
error between original and reduced model was least for the GA approach and its impulse
response energy was also the closest to that of the original model.
Li, Chen and Gong (1996) developed a GA-based Boltzmann learning refined evolution
method to perform model reduction for systems and control engineering applications. Their
approach offers high quality and tractability, and requires no prior starting points for the
reductions.
Yang, Hachino and Tsuji (1996) proposed a novel L2 model-reduction algorithm for
SISO continuous time systems combining least-squares method with the GA, in order to
overcome the cost function’s nonlinearity, and the multiple local minima problem.
Many reaction networks pose difficulties in simulation and control due to their
complexity. Thus, model reduction techniques have been developed to handle those difficulties.
Edwards, Edgar and Manousiouthakis (1998) proposed a novel approach that formulates the
kinetic model reduction problem as an optimization problem and solves it using genetic
algorithm.
Hsu, Tse and Wang (2001) proposed an enhanced multiresolutional dynamic GA that
would automatically generate a reduced order discrete time model for the sampled system of a
continuous plant preceded by a zero order hold.
Wang, Liu and Zhang’s (2004) model reduction approach for singular systems using
covariance approximation proposes a new error criterion that reflects the capacity of the
impulsive behavior for singular systems. Xu, Zhang and Zhang (2006) commented that the
proposed criterion suffers from some shortcomings because a matrix Br is kept constant in the

22
optimization process. To solve this problem, the authors reformulated the model reduction
problem and used a GA to overcome the said optimization problem.
Liu, Zhang and Duan (2007) on the other hand investigated this singular systems model
reduction problem using a PSO, and compared its results with those of the GA. The error
criterion of the PSO approach was found to approximate the original system better than the GA
approach.
Most recently, Du, Lam and Huang (2007) presented a constrained H2 model reduction
method for multiple input, multiple output delay systems by using a Genetic Algorithm. They
minimized the H2 error between the original and the approximate models subject to constraints
on the H∞ error between them and the matching of their steady-state under step inputs.
It is the intent of this study to perform a comprehensive evaluation and comparison of
GA and PSO for optimal model reduction using several benchmark model reduction examples.
Both time domain and frequency domain performances will be considered in our work. We will
also consider hybrid criteria of all or two of the three model reduction problems being studied
(L1, H2 and H∞) to get a better compromised reduced model.
Chapter 3
Evolutionary Algorithms
n evolutionary algorithm (EA) is a generic population-based meta-heuristic
optimization algorithm. An EA uses some mechanisms inspired by biological
evolution: reproduction, mutation, recombination, natural selection and survival of the fittest.
Candidate solutions to the optimization problem play the role of individuals in a population, and
the cost function determines the environment within which the solutions live. Evolution of the
population then takes place after the repeated application of the above operators.
Evolutionary algorithms consistently perform well in approximating solutions to all types
of problems because they do not make any assumption about the underlying fitness landscape;
this generality is shown by successes in fields as diverse as engineering, art, biology, economics,
genetics, operations research, robotics, social sciences, physics, and chemistry. Genetic
Algorithms and Particle Swarm Optimization are two famous Evolutionary Algorithms.
A

24
3.1 Genetic Algorithms:
Genetic Algorithms have been developed by John Holland, his colleagues and his
students at the University of Michigan in the 70s. The goals of their research have been:
a. To abstract and rigorously explain the adaptive processes of natural systems.
b. To design artificial systems software that retains the important mechanisms of
natural systems.
Genetic Algorithms (GAs) are search algorithms that mimic the mechanism of natural
selection and natural genetics. They combine survival of the fittest among string structures with a
structured yet randomized information exchange to form a search algorithm with some of the
innovative flair of human search. Genetic Algorithms are theoretically and empirically proven to
provide robust search in complex spaces (Goldberg, 1989).
GAs differ from normal optimization and search procedures in four ways (Goldberg,
1989):
1. GAs work with a coding of the parameter set, not the parameters themselves.
2. GAs search from a population of points, not a single point.
3. GAs use payoff (objective function) information, not derivatives or other
auxiliary knowledge.
4. GAs use probabilistic transition rules, not deterministic rules.

25
Genetic Algorithms are composed of three main operators:
1. Reproduction: is the process in which individual strings are copied according to
their fitness function’s value.
2. Crossover: is the process in which members of the newly reproduced strings in
the mating pool are mated at random.
3. Mutation: is the occasional random alteration of the value of a string position.
The individuals in the GAs population set should be coded as finite length strings over
some finite alphabet. Traditionally, individuals are represented in binary as strings of 0s and 1s,
but other encodings are also possible. Each string in the population is known as a chromosome.
A typical chromosome may look like this:
10010101110101001010011101101110111111101
The evolution usually starts from a population of randomly generated individuals. In each
generation, the fitness of every individual in the population is evaluated according to a fitness
function. The fitness function is problem dependent. It is a measure of profit, utility or goodness
that we want to maximize.
Multiple individuals are stochastically selected using a selection criteria from the current
population based on their fitness, and modified (recombined and possibly randomly mutated) to
form a new population. This leads to the evolution of populations of individuals that are better
suited to the environment than the individuals that they were created from, just as in natural

selectio
– Chipp
It does
makes
score is
each me
score. i
all you
been pr
algorith
or may
referenc
1991 –
on. The new
perfield et a
The Roulet
not guaran
sure it has
s represente
ember of th
.e., the fitte
have to do i
The Geneti
roduced, o
hm has term
y not have
ces on GAs
Buckles &
w population
al., 2004).
tte Wheel is
ntee that th
a very goo
ed by a pie
he populatio
r a member
is spin the b
ic Algorithm
r a satisfac
minated due
been reach
s and their a
Petty, 1992
n is then use
s the most c
e fittest me
od chance o
chart, or a
on. The size
r is the bigg
ball and gra
Fig
m terminate
ctory fitnes
to a maxim
hed (Goldb
applications
2).
ed in the ne
commonly u
ember goes
of doing so
roulette wh
e of the slice
ger the slice
ab the chrom
gure 3.1: R
es when eit
ss level ha
mum numbe
berg, 1989
s are (Freze
ext iteration
used selecti
through to
o. Imagine t
heel. Now y
e is proport
of pie it ge
mosome at th
Roulette Whe
ther a maxi
as been rea
er of genera
– Chipper
l, 1993 – F
of the algo
on criteria i
o the next g
that the pop
you assign
tional to tha
ets. Now, to
he point it s
eel.
imum numb
ached for t
ations, a sat
rfield et al.
leming & F
orithm (Gold
in Genetic A
generation,
pulation’s t
a slice of th
at chromoso
choose a ch
stops.
ber of gene
the populat
tisfactory so
., 2004). O
Fonseca, 19
26
dberg, 1989
Algorithms
but simply
total fitness
he wheel to
omes fitness
hromosome
erations has
tion. If the
olution may
Other useful
93 – Davis
6
9
.
y
s
o
s
e
s
e
y
l
,

27
Figure 3.2: Genetic Algorithm Flowchart.
3.2 Particle Swarm Optimization:
Particle Swarm Optimization (PSO) is another evolutionary computation algorithm. PSO
was found in 1995 by Kennedy and Eberhart when they observed that some living creatures such
as flocks of birds, schools of fish, herds of animals, and colonies of bacteria, tend to perform
swarming behavior. Such a corporative behavior has certain advantages as avoiding predators
and increasing the chance of finding food, but it requires communication and coordinated
End Criteria Reached?
Initial Population
Selection
Crossover
Mutation
Output Best Individual
Yes
No
New Population
Reproduction
28
decision making (Gazi & Passino, 2003 – Shi, 2004 – Eberhart & Kennedy, 1995 – Mendes,
Kennedy & Neves, 2004 – Hu, Eberhart & Shi, 2003 – Clerc & Kennedy, 2002 – Voss & Feng,
2002 – Fleischer, 2003).
Therefore, Particle Swarm Optimization, just like other evolutionary computation
techniques, is a population-based search algorithm. It simulates the behavior of bird flocking.
When a group of birds are randomly searching for food in an area, that has only one piece of
food, all birds have no idea where the food is, but rather know how far the food is in each
iteration; and thus tend to follow the bird that is nearest to the food.
Similarly, in PSO, each single solution is a particle (bird) in the search space. All
particles have fitness values evaluated by the fitness function to be optimized, and have
velocities which direct the flying of the particles.
The PSO algorithm is simple in concept, easy to implement and computationally
efficient. The procedure for implementing a PSO is as follows (Shi, 2004):
1. Initialize a population of particles with random positions and velocities on D
dimensions in the problem space.
2. For each particle, evaluate the desired optimization fitness function in D
variables.
3. Compare particles fitness evaluation with pbest (where pbest is the best fitness
value a particle has achieved so far). If current value is better than pbest, then set
pbest equal to the current value, and pi equals to the current position xi in D-
dimensional space.

29
4. Identify the particle in the neighborhood with the best success so far, and assign
its position to the variable G and its fitness value to variable gbest.
5. Change the velocity and position of each particle in the swarm according to the
bellow equations (Birge, 2003):
1 (3.1)
1 1 (3.2)
where
i is the particle index
k is the discrete time index
v is the velocity of the ith particle
x is the position of the ith particle
p is the best position found by the ith particle (personal best)
G is the best position found by swarm (global best, best of
personal bests)
& are random numbers on the interval [0 , l] applied to the ith
particle
is the inertial weight function
c1 & c2 are acceleration constants

30
6. Loop to step 2 until a criterion is met, usually a sufficiently good fitness or a
maximum number of iterations.
A decreasing inertial weight of the following form is used in the PSO approach:
(3.3)
where wi and wf are the initial and final inertial weights respectively, k is the current iteration and
N is the iteration (epoch) when the inertial weight should reach its final value. The decreasing
inertial weight is known to improve the PSO performance (Birge, 2003).
In this thesis work, Self-Adaptive Velocity Particle Swarm Optimization (SAVPSO) is
used to improve the convergence speed of the PSO (Lu & Chen, 2008 – Messaoud, Mansouri &
Haddad, 2008). In SAVPSO, (eq. 3.1) becomes:
1 | |
(3.4)
where sign(vi(k)) represents the sign of vi(k), i.e., its direction, and i' is a uniform random integer
in the range [1 swarm size], because starting from a certain stage in the search process, | pi' – pi |
roughly reflects the size of the feasible region. So particle i will not deviate too far from the
feasible region (Messaoud, Mansouri & Haddad, 2008).

Chapter 4
H2 Norm Model Reduction
he quantification of errors in control design model requires the measurement of
the “size” of the error signals associated with the system. Although there are many
ways to measure signal size, the concept of signal norm is the most popular in control design
(Hartley et al., 1998).
Consider a continuous time signal y(t). The norm of the signal y(t) is generally defined as:
| | (4.1)
Therefore the H2 norm of the signal y(t) becomes as follows (Doyle, Francis &
Tannenbaum, 1990):
| | (4.2)
T

32
The H2 norm of a signal may be defined equally well in the frequency domain as (Hartley
et al., 1998):
| | (4.3)
where Y(jω) represents the Fourier Transform of the signal y(t).
The H2 norm of the system G(s) on the other hand is defined as (Doyle, Francis &
Tannenbaum, 1990):
| | (4.4)
In order to compute the H2 norm of a system G(s), consider the state space representation
of that system:
(4.5)
Compute either the controllability gramian P or the observability gramian Q of the system given
by eq. (2.15) and eq. (2.16) respectively (Sánchez-Pena & Sznaier, 1998). The controllability and
observability gramians should satisfy the following equations:
0 (4.6)
0 (4.7)

33
The H2 norm of the system G(s) will then be (Doyle, Francis & Tannenbaum, 1990 –
Sánchez-Pena & Sznaier, 1998):
(4.8)
where C and B are the state space model matrices of system G(s), and P and Q are the
controllability and observability Gramians respectively.
This thesis study uses two main systems to examine the proposed model reductions
approaches. The first system is the 4th order Wilson (1970) Example represented by the
following state space model:
0 01 0
0 1500 245
0 10 0
0 1131 19
4100
0 0 0 1
(4.9)
The above system was reduced into a 2nd order system since there is a good separation
between the second and third Hankel singular values as seen below:
σ1 = 0.015938 σ2 = 0.002724
σ3 = 0.000127 σ4 = 0.000008 (4.10)
which tells us that a 2nd order reduced model will be a very good approximation of the original
system.

The second system is a 9th order Boiler system (Zhao & Sinha, 1983) with the following state space representation:
0.910 0 00 4.449 00 0 10.262
0 0 00 0 0
571.479 0 0
0 0 0 0 0 0 0 0 0
0 0 571.4790 0 00 0 0
10.262 0 00 10.987 00 0 15.214
0 0 0 0 0 0
11.622 0 0 0 0 0
0 0 00 0 0
0 0 11.622 0 0 0 0 0 0
15.214 0 0 0 89.874 0 0 0 502.665
4.3363.691
10.1411.612
16.629242.47614.261
13.67282.187
0.422 0.736 0.00416 0.232 0.816 0.715 0.546 0.235 0.0806
(4.11)
This system was reduced into a third order model since there is a good separation between the third and forth Hankel singular
values as seen below:
σ1 = 6.2115 σ2 = 0.8264 σ3 = 0.6770 σ4 = 0.0593 σ5 = 0.0568
σ6 = 0.0188 σ7 = 0.0096 σ8 = 0.0031 σ9 = 0.0007 (4.12)
34

35
The H2 system norm of eq. (4.8) was the fitness function implemented in MATLAB to
compute the H2 Norm of the error between the original system and the reduced order model with
a constraint on stability. If any of the Eigenvalues of the reduced order model are positive, i.e.,
reduced order system is unstable; then the fitness function is set to ∞ causing the GA and the
PSO to ignore that result.
4.1 GA Approach Results:
The settings of the GA used to perform the reduction for both the Wilson System and the
Boiler system were as follows:
Population size = 100
Encoding Criteria: Double Vector
Crossover Fraction = 0.8
Elite Count = 10
Stall Generations Limit = 1500
Stall Time Limit = ∞
Selection Function: Roulette Wheel
Crossover Function: Crossover Scattered
Mutation Function: Mutation Gaussian (4.13)

36
The Crossover Fraction represents the fraction of the next generation, other than elite
individuals, that are produced by crossover. The remaining individuals, other than elite
individuals, in the next generation are produced by mutation. Where the elite count specifies the
number of individuals that are guaranteed to survive to the next generation.
Crossover Scattered creates a random binary vector. It then selects the genes where the
vector is a 1 from the first parent, and the genes where the vector is a 0 from the second parent,
and combines the genes to form the child. For example if the first parent is P1 = [a b c d e f g h],
the second parent is P2 = [1 2 3 4 5 6 7 8] and the vector is the v = [1 1 0 0 1 0 0 0], then the
child will be as follows: [a b 3 4 e 6 7 8].
Mutation Gaussian adds a random number to each vector entry of an individual. This
random number is taken from a Gaussian distribution centered on zero. The variance of this
distribution is 1 at the first generation, and then the variance shrinks linearly as generations go
by, reaching 0 at the last generation.
The Stall Generation Limit is the stopping criterion used to stop the GA. If there is no
improvement in the best fitness value for the number of generations specified by Stall Generation Limit,
the algorithm stops and outputs the best individual.
The Stall Time Limit is another possible stopping criterion. If there is no improvement in
the best fitness value for the number of seconds specified by Stall Time Limit, the algorithm stops and
outputs the best individual.

37
We chose to fix the population size to 100 throughout the entire thesis work. However,
we will demonstrate the effect of population size on the performance of the GA later in this
section.
First, the default settings of the GA were tried to solve the H2 Norm Model Reduction
problem, except the Roulette Wheel was used as the selection function, since it is the most
commonly used selection criteria in GAs.
However, the GA never reached a solution and kept getting stuck because of reaching
time stall limit and generation stall limit, for which the default values of 20 and 50 respectively
where relatively small.
We set time stall limit to ∞ and increased the generation stall limit step by step until the
value 1500 proved to be perfect for our application. The crossover fraction, migration fraction,
crossover function and mutation function on the other hand were kept at default values.
The final set of settings of eq. (4.13) then succeeded in reducing all the different systems
we tried using all norm approaches.
The following system represents the 2nd order result of the H2 Norm Model Reduction
approach on the 4th order Wilson System using the GA settings of eq. (4.13):
1.544 0.8120.6359 2.145 0.3346
0.08441
0.1522 0.5652
(4.14)

38
The GA reached the above result after 9,205 iterations at about 0.33 seconds per iteration,
and it stopped after the stall generation limit was exceeded.
The following system on the other hand represents the 3rd order result of the H2 Norm
Model Reduction approach on the 9th order Boiler System:
9.483 18.97 2.1594.6 18.08 6.348
8.038 8.843 4.728
6.6236.0638.198
9.074 2.346 9.506
(4.15)
The GA reached the above result after 12,551 iterations at about 0.40 seconds per
iteration, and it also stopped after the stall generation limit was exceeded.
In order to demonstrate the effect of population size on GA performance, we also reduced
the Wilson system using a population size of 50, which resulted with the following 2nd order
reduced order model:
0.8211 0.66230.6772 2.853 0.03641
0.04522
0.6071 0.5664
(4.16)
and a population size of 200, which resulted with the following 2nd order reduced order model:
2.697 0.72410.3819 0.9233 0.2186
0.04864
0.1098 0.4262
(4.17)
Table 4.1 compares the H2 Norms of the resulting reduced order models:

39
Table 4.1: Wilson: GA Performance for different population sizes:
Population Size Execution Time Per Iteration (sec.) H2 Norm
50 0.30 6.521 ×10–4
100 0.33 6.549×10–4
200 0.61 6.450×10–4
Figure 4.1 compares the convergence rates of the GA for the three population sizes:
Figure 4.1: Wilson: Convergence rate of the GA for different population sizes.
Note that although the GA reached the final solution in 12,071 iterations (population =
50), 9,205 iterations (population = 100) and 8,429 iterations (population = 200); it is obvious
0 10 20 30 40 50 60 70 80 90 10010-4
10-3
10-2
10-1
100
101
Generations
Gbe
st
H2 Model Reduction of Wilson System Using GA
Population Size = 100Population Size = 50Population Size = 200

40
from Figure (4.1) that the GA converged very fast to the solution, and reached very close to the
final solution in the first 30 to 60 iterations. In the following iterations the GA was just refining
the results.
We can conclude from the above results that the population size of the GA has no major
effect on the performance of the GA. The lower the population size the higher the number of
iterations the GA requires to converge, the less the time per iteration and vice versa. Thus,
whatever the size of the population, the GA has the same probability of converging to a solution.
4.2 PSO Approach Results:
The settings of the PSO used to perform the reduction for both the Wilson System and the
Boiler system were as follows:
Swarm size = 100
Maximum Particle Velocity mv= 4
Acceleration Const. c1 (local best influence) = 2
Acceleration Const. c2 (global best influence) = 2
Initial inertia weight = 0.9
Final inertia weight = 0.1
Epoch when inertial weight at final value = 6000

41
Iteration Stall Limit = 1500 (4.18)
As Birge (2003) recommended, we use a linearly decreasing inertial weight (see
equations 3.1 and 3.2). And the epoch (iteration) when the inertial weight reaches its final value
is specified by the parameter Epoch when inertial weight at final value above.
The Iteration Stall Limit just as the Stall Generation Limit in the GA is the stopping
criteria used to stop the PSO. If there is no improvement in the best fitness value for the number of
iterations specified by Iteration Stall Limit, the algorithm stops and outputs the best particle.
We chose to fix the swarm size to 100 throughout the entire thesis work as we did with
the population size in the GA. The next three settings are the default values of mv (maximum
velocity of a particle in a swarm), and the acceleration constants c1 and c2.
The default settings of the initial inertial weight and the final inertial weight were 0.9 and
0.4 respectively. The default setting of the epoch when inertial weight at final value was 1500.
However, the PSO kept getting stuck at some local minima.
Looking at eq. (3.1) of the PSO algorithm, we noted that decreasing the inertial weights
decreases the effect of the particles’ velocity whilst increasing the effect of the particles’ best
achieved fitness value and the global best achieved fitness value of the swarm. Therefore we
decreased the final inertial weight even more to 0.1 and we increased the epoch when inertial
weight at final value to 6000 in order to give the PSO a wide range of iterations to search the
space before having it focus more on its best achieved values and try to better them. Our PSO
then converged to a solution.

42
The following system represents the 2nd order result of the H2 Norm Model Reduction
approach on the 4th order Wilson System:
3.623 2.7671 0 1
0
0.003252 0.07323
(4.19)
The PSO reached the above result after 15,839 iterations at about 0.20 seconds per
iteration, and it stopped after the stall generation limit was exceeded.
The 3rd order result of the H2 Norm Model Reduction approach on the 9th order Boiler
System is given below:
32.37 428.9 380.51 0 00 1 0
100
152.2 4431 4841
(4.20)
The PSO reached the above result after 13,051 iterations at about 0.30 seconds per
iteration, and it also stopped after the stall generation limit was exceeded.
However, to demonstrate the effect of the swarm size on the performance of the PSO, we
also reduced the Wilson system using a swarm size of 50, which resulted with the following 2nd
order reduced order model:
2.876 0.56191.153 0.7344 0.0608
0.03639
0.3305 0.4636
(4.21)
and a swarm size of 200, which resulted with the following 2nd order reduced order model:

43
4.047 1.8912.395 0.437 0.1445
0.7731
0.4932 0.9637
(4.22)
Table 4.2 compares the H2 Norms of the resulting reduced order models and Figure 4.2
compares the convergence rates of the PSO for the three swarm sizes:
Table 4.2: Wilson: PSO Performance for different swarm sizes:
Swarm Size Execution Time Per Iteration (sec.) H2 Norm
50 0.15 6.449×10–4
100 0.20 6.450×10–4
200 0.37 6.449×10–4
Figure 4.2: Wilson: Convergence rate of the PSO for different swarm sizes.
0 50 100 150 200 250 30010-4
10-3
10-2
10-1
100
101
Generations
Gbe
st
H2 Model Reduction of Wilson System Using PSO
Swarm Size = 100Swarm Size = 50Swarm Size = 200

44
Unlike the GA, the PSO took longer to reach close to the final solution. However, we can
conclude from the above results that similar to the GA, the swarm size has no major effect on the
performance of the PSO. The lower the swarm size the higher the number of iterations the PSO
requires to converge, the less the time per iteration and vice versa. Therefore the size of the
swarm does not affect the PSO’s probability of converging to a solution.
4.3 Comparative Study of the Two Approaches:
Figures 4.3 and 4.4 compare the convergence rates of both the GA and the PSO for the
Wilson system and the Boiler system respectively. Note that in both cases the GA converges
faster than the PSO towards the solution.
Figure 4.3: Wilson: Convergence rate of GA and PSO.
0 100 200 300 400 500 60010
-4
10-3
10-2
10-1
100
101
Generations
Gbe
st
H2 Model Reduction of Wilson System
GA Model Reduction ApproachPSO Model Reduction Approach

45
Figure 4.4: Boiler: Convergence rate of GA and PSO.
Wilson (1970) reduced the system in eq. (4.9) using an H2 analytical approach into a 2nd
order system and resulted with the following reduced model:
0 2.861 3.78 0.076
0.0036
0 1
(4.23)
The following sections will compare Wilson’s result to the results of the GA and the PSO
approaches, as well as comparing the GA results of the Boiler system model reduction to those
of the PSO.
0 2000 4000 6000 8000 10000 1200010-1
100
101
102
103
Generations
Gbe
st
H2 Model Reduction of Boiler System
GA Model Reduction ApproachPSO Model Reduction Approach

46
4.3.1 Steady State Errors and Norms:
Tables 4.3 and 4.4 compare the steady state errors (SSE) and the H2, H∞ and L1 norms of
the reduced order models for both the Wilson System and the Boiler System respectively.
Table 4.3: Wilson: SSE and Norms of the H2 Norm MR approach:
SS Error H2 Norm H∞ Norm L1 Norm
Wilson’s Result 9.324×10–5 6.724×10–4 2.525×10–4 6.957×10–4
GA Approach 9.780×10–5 6.549×10–4 2.704×10–4 7.765×10–4
PSO Approach 1.968×10–4 6.450×10–4 2.405×10–4 8.678×10–4
Note that although Wilson’s approach resulted in the lowest steady state error, both the
GA and PSO approaches resulted in lower H2 Norms. The PSO approach however outperformed
the GA approach by resulting with the lowest H2 Norm.
Table 4.4: Boiler: SSE and Norms of the H2 Norm MR approach:
SS Error H2 Norm H∞ Norm L1 Norm
GA Approach
1.242×10–2 4.630×10–1 1.221×10–1 1.881×10–1
PSO Approach 4.353×10–3 4.628×10–1 1.220×10–1 1.911×10–1

47
In the Boiler case, the PSO approach also outperformed the GA approach by resulting
with lower steady state error and H2 Norm.
4.3.2 Impulse Responses and Initial Values:
Figure 4.5 compares the impulse responses of the original Wilson System to the result of
Wilson’s 2nd order Model Reduction approach of eq. (4.23) and the results of the GA and PSO
2nd order Model Reduction approaches:
Figure 4.5: Wilson: Impulse Responses of the H2 Norm MR approach.
0 1 2 3 4 5 6-4
-2
0
2
4
6
8
10
12
14
16x 10
-3 Impulse Response
Time (sec)
Ampl
itude
Original Wilson ModelReduced Wilson ModelH2 GA Reduced ModelH2 PSO Reduced Model

48
Figure 4.6 zooms into the above figure to compare the initial responses of the four
different systems:
Figure 4.6: Wilson: Initial Values of the H2 Norm MR approach.
Note that the impulse responses of the reduced order models highly resemble that of the
original system. The results of the GA and PSO approaches are also close to the original system
in terms of initial values with a small error of about 3.2×10–3.
Figure 4.7 compares the impulse responses of the original Boiler System to the results of
the GA and PSO 3rd order Model Reduction approaches:
0 0.01 0.02 0.03 0.04 0.05 0.06
-4
-3
-2
-1
0
1
2x 10
-3 Impulse Response
Time (sec)
Ampl
itude
Original Wilson ModelReduced Wilson ModelH2 GA Reduced ModelH2 PSO Reduced Model
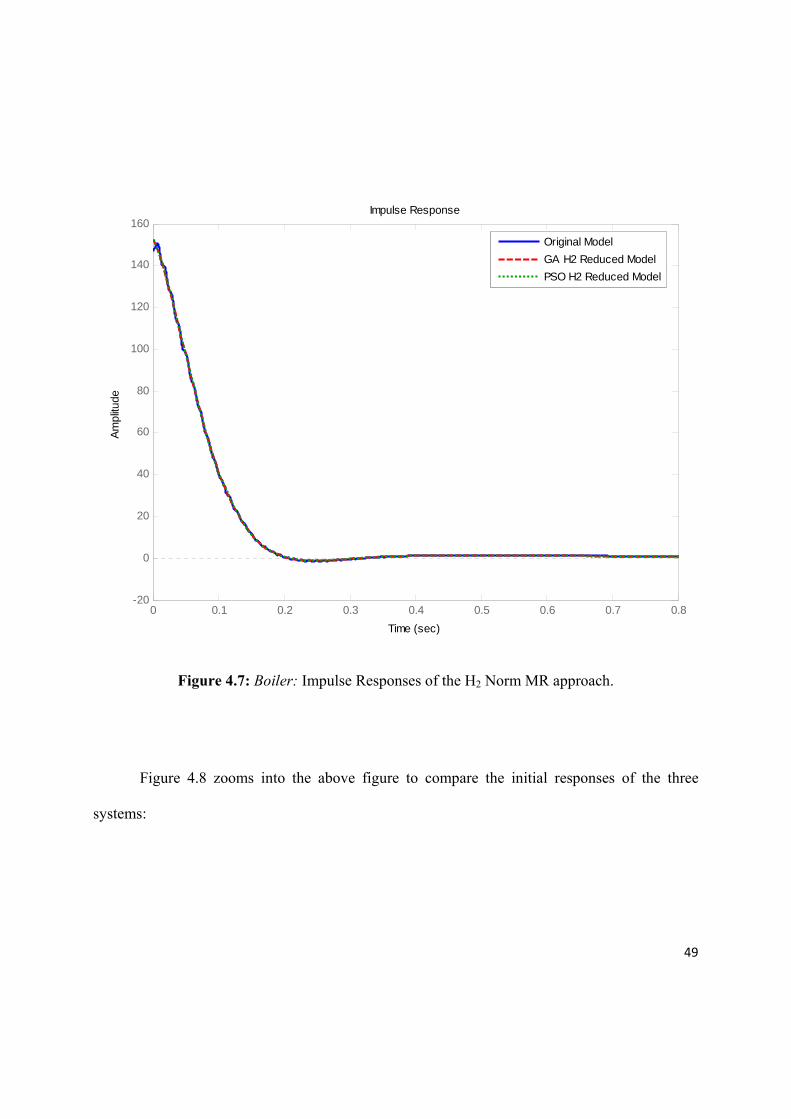
49
Figure 4.7: Boiler: Impulse Responses of the H2 Norm MR approach.
Figure 4.8 zooms into the above figure to compare the initial responses of the three
systems:
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8-20
0
20
40
60
80
100
120
140
160Impulse Response
Time (sec)
Ampl
itude
Original ModelGA H2 Reduced ModelPSO H2 Reduced Model

50
Figure 4.8: Boiler: Initial Values of the H2 Norm MR approach.
Note that the impulse responses of the reduced order models highly resemble that of the
original system. The initial values of the GA and PSO results are also relatively close to that of
the original system.
4.3.3 Step Responses:
Figure 4.9 compares the step responses of the original Wilson System to the result of
Wilson’s 2nd order Model Reduction approach of eq. (4.23) and the results of the GA and PSO
2nd order Model Reduction approaches:
0 0.002 0.004 0.006 0.008 0.01 0.012145
146
147
148
149
150
151
152
153Impulse Response
Time (sec)
Ampl
itude
Original ModelGA H2 Reduced ModelPSO H2 Reduced Model

51
Figure 4.9: Wilson: Step Responses of the H2 Norm MR approach.
Figure 4.10 compares the step responses of the original Boiler System to the results of the
GA and PSO 3rd order Model Reduction approaches:
0 1 2 3 4 5 6-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03Step Response
Time (sec)
Ampl
itude
Original Wilson ModelReduced Wilson ModelH2 GA Reduced ModelH2 PSO Reduced Model

52
Figure 4.10: Boiler: Step Responses of the H2 Norm MR approach.
Note that the step responses of the reduced order models highly resemble those of the
original systems for both the Boiler and the Wilson example.
4.3.4 Frequency Responses:
Figure 4.11 compares the frequency responses of the original Wilson System to the result
of Wilson’s 2nd order Model Reduction approach and the results of the GA and PSO 2nd order
Model Reduction approaches:
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
Step Response
Time (sec)
Ampl
itude
Original ModelGA H2 Reduced ModelPSO H2 Reduced Model

53
Figure 4.11: Wilson: Frequency Responses of the H2 Norm MR approach.
Figure 4.12 compares the frequency responses of the original Boiler System to the results
of the GA and PSO 3rd order Model Reduction approaches:
-200
-150
-100
-50
0
Mag
nitu
de (d
B)
10-2
10-1
100
101
102
103
-180
-90
0
90
180
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Original Wilson ModelReduced Wilson ModelH
2 GA Reduced Model
H2 PSO Reduced Model

54
Figure 4.12: Boiler: Frequency Responses of the H2 Norm MR approach.
Note that the frequency responses of the reduced order models highly resemble those of
the original systems at low frequencies. The magnitude of the reduced order models of the
Wilson example show some error at high frequencies due to the two missing states in the reduced
order models. The frequency responses of the reduced order Boiler models also tend to miss a
high frequency spark evident in the frequency response of the original Boiler system. However,
since most real-time physical systems operate at low frequencies, this error at high frequencies
tends to be acceptable and can be ignored.
-20
-10
0
10
20
30
Mag
nitu
de (d
B)
10-1
100
101
102
103
-135
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Original ModelGA H2 Reduced Model
PSO H2 Reduced Model

55
4.4 GA and PSO H2 Norm Model Reduction Approachs vs. Previous Studies:
This section compares the norms of other researchers’ approaches to this studies proposed
approaches. Two papers (Maust & Feliachi, 1998) and (Yang, Hachino & Tsuji, 1996) used GA
to solve H2 Norm model reduction problems:
4.4.1 Maust and Feliachi:
Maust and Feliachi (1998) reduced the Wilson System of eq. (4.9) using Genetic
Algorithms. They used the H2 and L1 Norms of eq. (2.18) and eq. (2.19) respectively to perform
the model reduction, where the error was defined in eq. (1.9).
They set the fitness function to be maximized by the GA to be:
(4.24)
They used Genetic crossover (simple and arithmetic) and mutation operators to combine
information from candidate solutions to produce new solutions. Selection of next generation was
based on roulette-wheel.
Maust and Feliachi claim that their results were similar to that of Wilson (1970), with a
fitness value of 0.998, equivalent to a norm value of 2.004×10–3. Table 4.3 proves that the result
of this study’s proposed GA approach is better than that of Maust and Feliachi in terms of H2
Norms. Also, the PSO approach showed a better performance than the GA approach.

56
4.4.2 Yang, Hachino, and Tsuji:
Yang, Hachino, and Tsuji (1996) proposed a GA based H2 Norm model reduction
approach for SISO continuous time systems that introduces time delay into the reduced order
model.
Given an nth order SISO time delay system with transfer function:
exp (4.25)
where its rational part is stable and strictly proper, they tried to find a strictly proper lth order
reduced model with the time delay:
∏
exp
∏ .exp
(4.26)
Their cost function was defined as:
(4.27)
where W(jω) is a frequency weighting function introduced to obtain better approximation over a
pre-specified frequency range.
They used the following 6th order academic example from (Fukata, Mohri & Takata,
1983) and (Liu & Anderson, 1987) to test their approach:

57
.
(4.28)
Yang, Hachino and Tsuji reduced the above system into 1st order, 2nd order, 3rd order, and
4th order systems with time delay, and resulted with the following transfer functions respectively:
The 1st order reduced order model:
. ..
(4.29)
The 2nd order reduced order model:
. . . . .
(4.30)
The 3rd order reduced order model:
. . . . . . .
(4.31)
The 4th order reduced order model:
. . . . . . . . .
(4.32)
Using this study’s PSO approach to obtain the 1st order, 2nd order, 3rd order, and 4th order
reduced order models of system (4.30) with time delay resulted with the following systems
respectively:
The 1st order reduced order model:
. ..
(4.33)

58
The 2nd order reduced order model:
. . . .
(4.34)
The 3rd order reduced order model:
. . . . . . .
(4.35)
The 4th order reduced order model:
. . . . . . . . .
(4.36)
Table 4.5 compares the H2 Norms of the above eight reduced order models:
Table 4.5: H2 Norms of Yang’s 6th order example:
1st order 2nd order 3rd order 4th order
Yang’s GA Approach 1.0330×10–1 1.8286×10–2 1.3084×10–2 8.5880×10–3
Proposed PSO Approach 9.9326×10–2 1.8094×10–2 1.2937×10–2 8.2235×10–3
Table 4.5 proves that the proposed PSO approach yields better results than Yang et al.’s
proposed GA approach. Figures 4.13 to 4.24 show the impulse responses, step responses, and
frequency responses of the eight reduced order models in comparison to the original 6th order
system.
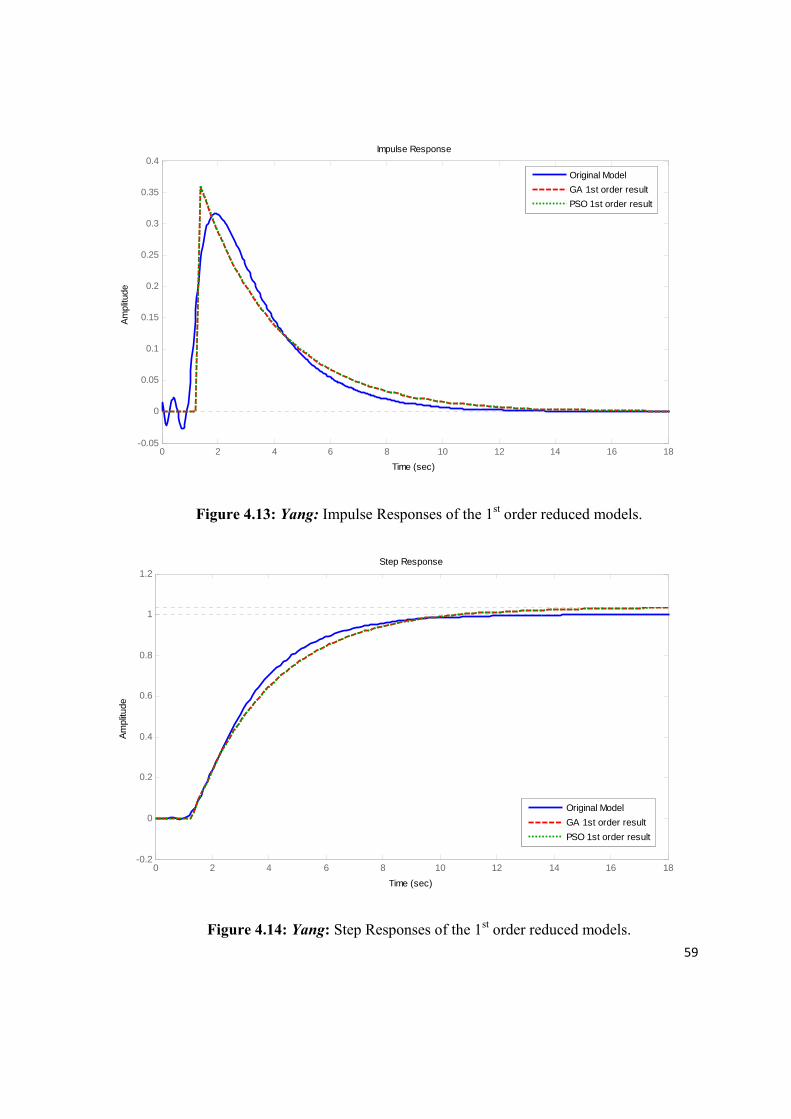
59
Figure 4.13: Yang: Impulse Responses of the 1st order reduced models.
Figure 4.14: Yang: Step Responses of the 1st order reduced models.
0 2 4 6 8 10 12 14 16 18-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4Impulse Response
Time (sec)
Ampl
itude
Original ModelGA 1st order resultPSO 1st order result
0 2 4 6 8 10 12 14 16 18-0.2
0
0.2
0.4
0.6
0.8
1
1.2Step Response
Time (sec)
Ampl
itude
Original ModelGA 1st order resultPSO 1st order result

60
Figure 4.15: Yang: Frequency Responses of the 1st order reduced models.
Figure 4.16: Yang: Impulse Responses of the 2nd order reduced models.
-50
-40
-30
-20
-10
0
10
Mag
nitu
de (d
B)
10-2
10-1
100
101
-180
-90
0
90
180
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Original Model
GA 1st order result
PSO 1st order result
0 2 4 6 8 10 12-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35Impulse Response
Time (sec)
Ampl
itude
Original ModelGA 2nd order resultPSO 2nd order result

61
Figure 4.17: Yang: Step Responses of the 2nd order reduced models.
Figure 4.18: Yang: Frequency Responses of the 2nd order reduced models.
0 2 4 6 8 10 12-0.2
0
0.2
0.4
0.6
0.8
1
1.2Step Response
Time (sec)
Ampl
itude
Original ModelGA 2nd order resultPSO 2nd order result
-50
-40
-30
-20
-10
0
Mag
nitu
de (d
B)
10-2
10-1
100
101
-180
-90
0
90
180
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Original Model
GA 2nd order result
PSO 2nd order result

62
Figure 4.19: Yang: Impulse Responses of the 3rd order reduced models.
Figure 4.20: Yang: Step Responses of the 3rd order reduced models.
0 1 2 3 4 5 6-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35Impulse Response
Time (sec)
Ampl
itude
Original Model
GA 3rd order result
PSO 3rd order result
0 2 4 6 8 10 12-0.2
0
0.2
0.4
0.6
0.8
1
1.2Step Response
Time (sec)
Ampl
itude
Original Model
GA 3rd order result
PSO 3rd order result

63
Figure 4.21: Yang: Frequency Responses of the 3rd order reduced models.
Figure 4.22: Yang: Impulse Responses of the 4th order reduced models.
-50
-40
-30
-20
-10
0
10
Mag
nitu
de (d
B)
10-2
10-1
100
101
-180
-90
0
90
180
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Original Model
GA 3rd order result
PSO 3rd order result
0 1 2 3 4 5 6 7 8 9 10-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35Impulse Response
Time (sec)
Ampl
itude
Original ModelGA 4th order result
PSO 4th order result

64
Figure 4.23: Yang: Step Responses of the 4th order reduced models.
Figure 4.24: Yang: Frequency Responses of the 4th order reduced models.
0 2 4 6 8 10 12-0.2
0
0.2
0.4
0.6
0.8
1
1.2Step Response
Time (sec)
Ampl
itude
Original Model
GA 4th order result
PSO 4th order result
-50
-40
-30
-20
-10
0
10
Mag
nitu
de (d
B)
10-2
10-1
100
101
-180
-90
0
90
180
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Original Model
GA 4th order result
PSO 4th order result

Chapter 5
H∞ Norm Model Reduction
onsider the general signal norm representation of eq.(4.1). Since we are studying
H∞ norm in this chapter, let p approach infinity (∞). Eq. (4.1) now becomes as
follows (Hartley et al., 1998):
lim | | (5.1)
For large p, the maximum values of y(t) are emphasized in the integral far more than the smaller
values; and therefore the integral becomes approximately proportional to the maximum value of
y(t) raised to the power p. Taking the pth root and letting p approach infinity yields the following
representation for the H∞ signal norm (Hartley et al., 1998):
sup | | (5.2)
C

66
Therefore, the H∞ norm of a signal is simply the magnitude of the largest value of the
signal . Moreover, the H∞ norm of a signal represents a bound on the signal amplitude for all
time. Unlike the L1 and the H2 norm, the H∞ norm of a signal may be finite even if the signal
does not decay (Hartley et al., 1998).
The H∞ norm of the system G(s) on the other hand is defined as (Doyle, Francis &
Tannenbaum, 1990):
sup | | (5.4)
Again, the H∞ norm of the system G(s) in the frequency domain is equal to the largest
magnitude of the frequency response over all frequencies. Graphically, it represents the highest
peak in the (Bode) magnitude plot of the transfer function, or the magnitude of the point on the
Nyquist plot farthest from the origin in the complex plane (Hartley et al., 1998).
The H∞ norm has a finite lower bound (Kavranoğlu & Bettayeb, 1993b). Consider the
Hankel singular values of the system G(s) defined in eq. (2.1). In H∞ Model Reduction, if the nth
order transfer function G(s) is reduced into an rth order transfer function Gr(s). Then:
(5.5)
where σr+1 is the (r + 1)st HSV of G(s).
For example, consider the Hankel singular values of the Wilson example given by eq.
(4.9) and its Hankel Singular Values of eq. (4.10). Since we are reducing the system into a 2nd
order model, then the largest dropped Hankel singular value is σ3 = 1.27×10–4. Therefore,
theoretically, the smallest achievable H∞ norm will be 1.27×10–4. Likewise, from the Hankel

67
singular values of the Boiler system given by eq. (4.12); we note the lower bound of H∞ norm in
3rd order model reduction will be 5.93×10–2.
However, it is convenient to mention here that those values are almost impossible to
achieve. But if one results with a close enough H∞ value, this would be a good indication that an
optimal solution was reached.
To compute the H∞ norm of a system G(s), consider the state space representation of that
system given by eq. (4.5). Define the 2n × 2n Hamiltonian matrix as follows (Doyle, Francis &
Tannenbaum, 1990):
(5.6)
As the theorem says; 1 if and only if H has no eigenvalues on the imaginary
axis (Doyle, Francis & Tannenbaum, 1990). Therefore, in order to compute the H∞ norm of the
system G(s), one should follow the following steps:
1. Select a positive number γ.
2. Test if γ (i.e. if γ 1) by calculating the eigenvalues of the resulting
Hamiltonian matrix.
3. Increase or decrease γ accordingly and repeat step 2.
It is also known that the H∞ norm of a system G(s) is always lower than the L1 norm of
that system (Hartley et al., 1998):
(5.7)

68
where g(t) is the impulse response of the system G(s). Therefore, if we perform L1 norm model
reduction, we are indirectly lowering the H∞ norm of the system error as well:
(5.8)
In the following sections, we will use the H∞ Norm Model Reduction approach to reduce
the 4th order Wilson system of eq. (4.9) into a 2nd order reduced model, and the 9th order Boiler
system of eq. (4.11) into a 3rd order reduced model. The H∞ Norm fitness function that was
implemented in MATLAB computes the peak gain of the frequency response (the magnitude of
the maximum point in the Bode plot) of the error between the original system and the reduced
order model with the same stability constraint explained in Chapter 4.
5.1 GA Approach Results:
The same GA settings as in eq. (4.13) were used to perform the model reduction for both
the Wilson System and the Boiler system in this chapter.
The following system represents the 2nd order result of the H∞ Norm Model Reduction
approach on the 4th order Wilson System:
3.457 6.0490.3239 0.2429 0.2793
0.01254
0.05126 1.428
(5.9)
The GA reached the above result after 8,410 iterations at about 0.54 seconds per iteration,
and it stopped after the stall generation limit was exceeded.

69
The following system on the other hand represents the 3rd order result of the H∞ Norm
Model Reduction approach on the 9th order Boiler System:
6.449 29.73 0.38563.129 21.71 10.694.918 6.326 6.661
4.9214.127
10.74
6.591 0.1677 10.71
(5.10)
The GA reached the above result after 57,515 iterations at about 0.72 seconds per
iteration, and it also stopped after the stall generation limit was exceeded.
5.2 PSO Approach Results:
At first, we used the same settings of eq. (4.18) to reduce the Wilson system and the
Boiler system. But unfortunately, our PSO kept getting stuck at some local minima. We wanted
to study the effect of the maximum velocity of a particle (mv) and started by increasing it to 10,
50 and 100. We noted that increasing mv makes the fitness value drop faster at first. However, it
dropped very fast but never converged. Lower mv might be slower, but it guarantees that the
PSO never misses the solution by jumping over it. However decreasing mv too much limits the
search space, and thus does not help the PSO to converge.
Different mv values were tried step by step (3.5, 3, 2.5, 2, 1.5 and 1) and the value 2 made
the PSO converge for the Boiler system. The next step was decreasing and increasing c1 and c2
but that did not improve the PSO’s performance for the Wilson system. We then started
increasing and decreasing different parameters, trying different combinations until mv = 2 and
epoch when inertial weight at final value = 20,000 converged to a solution.
70
The following system represents the 2nd order result of the H∞ Norm Model Reduction
approach on the 4th order Wilson System:
0.9233 0.23751.117 2.766 0.5446
1.087
0.04847 0.02771
(5.11)
The PSO reached the above result after 21,114 iterations at about 0.40 seconds per
iteration, and it stopped after the stall generation limit was exceeded.
The 3rd order result of the H∞ Norm Model Reduction approach on the 9th order Boiler
System is given below:
24.01 13.71 26.6722.65 10.85 22.19
2.5 9.653 22.01
13.1811.6
1.477
18.29 6.884 10.24
(5.12)
The PSO reached the above result after 6,943 iterations at about 0.56 seconds per
iteration, and it also stopped after the stall generation limit was exceeded.
5.3 Comparative Study of the Two Approaches:
Figures 5.1 and 5.2 compare the convergence rates of both the GA and the PSO for the
Wilson system and the Boiler system respectively. Note that the GA converged close to the
solution faster than the PSO for the Wilson system, but the PSO converged faster in case of the
Boiler, while the GA converges slowly in the coming iterations towards the solution.

71
Figure 5.1: Wilson: Convergence rate of GA and PSO.
Figure 5.2: Boiler: Convergence rate of GA and PSO.
0 50 100 150 200 250 300 350 400 450 50010-4
10-3
10-2
10-1
100
Generations
Gbe
st
Hoo Model Reduction of Wilson System
GA Model Reduction ApproachPSO Model Reduction Approach
0 500 1000 1500 2000 2500 3000 3500 400010-1
100
101
102Hoo Model Reduction of Boiler System
Gbe
st
Generations
GA Model Reduction ApproachPSO Model Reduction Approach

72
The following sections will compare Wilson’s result of eq. (4.23) to the results of the GA
and the PSO approaches, as well as comparing the GA results of the Boiler system model
reduction to those of the PSO.
5.3.1 Steady State Errors and Norms:
Tables 5.1 and 5.2 compare the steady state errors (SSE) and the H2, H∞ and L1 norms of
the reduced order models for both the Wilson System and the Boiler System respectively.
Table 5.1: Wilson: SSE and Norms of the H∞ Norm MR approach:
SS Error H2 Norm H∞ Norm L1 Norm
Wilson’s Result 9.324×10–5 6.724×10–4 2.525×10–4 6.957×10–4
GA Approach 2.144×10–6 6.601×10–4 2.239×10–4 7.818×10–4
PSO Approach 2.144×10–4 6.593×10–4 2.144×10–4 8.123×10–4
Table 5.2: Boiler: SSE and Norms of the H∞ Norm MR approach:
SS Error H2 Norm H∞ Norm L1 Norm
GA Approach 1.126×10–1 6.844×10–1 1.127×10–1 3.154×10–1
PSO Approach 1.275×10–3 6.917×10–1 1.116×10–1 3.137×10–1

73
5.3.2 Impulse Responses and Initial Values:
Figure 5.3 compares the impulse responses of the original Wilson System to the result of
Wilson’s 2nd order Model Reduction approach and the results of the GA and PSO 2nd order
Model Reduction approaches:
Figure 5.3: Wilson: Impulse Responses of the H∞ Norm MR approach.
Figure 5.4 zooms into the above figure to compare the initial responses of the four
different systems:
0 1 2 3 4 5 6-4
-2
0
2
4
6
8
10
12
14
16x 10
-3 Impulse Response
Time (sec)
Ampl
itude
Original Wilson ModelReduced Wilson ModelH
inf2 GA Reduced Model
Hinf
PSO Reduced Model

74
Figure 5.4: Wilson: Initial Values of the H∞ Norm MR approach.
Note that the impulse responses of the reduced order models highly resemble that of the
original system. The three reduced order models are also close to the original system in terms of
initial values with a small error of about 3.65×10–3.
Figure 5.5 compares the impulse responses of the original Boiler System to the results of
the GA and PSO 3rd order Model Reduction approaches:
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
-4
-3
-2
-1
0
1
2x 10
-3 Impulse Response
Time (sec)
Ampl
itude
Original Wilson ModelReduced Wilson ModelH
inf2 GA Reduced Model
Hinf
PSO Reduced Model

75
Figure 5.5: Boiler: Impulse Responses of the H∞ Norm MR approach.
Figure 5.6 zooms into the above figure to compare the initial responses of the three
systems:
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7-20
0
20
40
60
80
100
120
140
160Impulse Response
Time (sec)
Ampl
itude
Original ModelGA H
inf Reduced Model
PSO Hinf
Reduced Model

76
Figure 5.6: Boiler: Initial Values of the H∞ Norm MR approach.
Note that the impulse responses of the reduced order models highly resemble that of the
original system, and their initial values are also relatively close to that of the original system.
5.3.3 Step Responses:
Figure 5.7 compares the step responses of the original Wilson System to the result of
Wilson’s 2nd order Model Reduction approach and the results of the GA and PSO 2nd order
Model Reduction approaches:
0 0.005 0.01 0.015142
143
144
145
146
147
148
149
150
151
152Impulse Response
Time (sec)
Ampl
itude
Original ModelGA Hinf Reduced Model
PSO Hinf Reduced Model

77
Figure 5.7: Wilson: Step Responses of the H∞ Norm MR approach.
Figure 5.8 compares the step responses of the original Boiler System to the results of the
GA and PSO 3rd order Model Reduction approaches:
0 1 2 3 4 5 6-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03Step Response
Time (sec)
Ampl
itude
Original Wilson Model
Reduced Wilson Model
Hinf
GA Reduced Model
Hinf PSO Reduced Model

78
Figure 5.8: Boiler: Step Responses of the H∞ Norm MR approach.
The step responses of the reduced order Wilson and Boiler models also highly resemble
those of the original systems.
5.3.4 Frequency Responses:
Figure 5.9 compares the frequency responses of the original Wilson System to the result
of Wilson’s 2nd order Model Reduction approach and the results of the GA and PSO 2nd order
Model Reduction approaches:
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
2
4
6
8
10
12
14Step Response
Time (sec)
Ampl
itude
Original Model
GA Hinf
Reduced Model
PSO Hinf
Reduced Model

79
Figure 5.9: Wilson: Frequency Responses of the H∞ Norm MR approach.
Figure 5.10 compares the frequency responses of the original Boiler System to the results
of the GA and PSO 3rd order Model Reduction approaches:
-200
-150
-100
-50
0
Mag
nitu
de (d
B)
10-2
10-1
100
101
102
103
-180
-90
0
90
180
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Original Wilson ModelReduced Wilson ModelHoo GA Reduced Model
Hoo PSO Reduced Model

80
Figure 5.10: Boiler: Frequency Responses of the H∞ Norm MR approach.
Note that the frequency response behavior of the H∞ reduced order models is similar to
those of the H2 Norm reduced order models at high frequencies. However, since most real-time
physical systems operate at low frequencies, this error at high frequencies can be ignored.
5.4 PSO H∞ Norm Model Reduction Approach vs. Previous Studies:
Tan and Li (1996) investigated weighted H∞ Model Reduction using Genetic Algorithms.
Given an mth order transfer function G(s), they find a reduced model Gr(s) such that the cost
function JG is minimized given a frequency weighting function Wα(s):
-20
-10
0
10
20
30
Mag
nitu
de (d
B)
10-1
100
101
102
103
-135
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Original ModelGA Hoo Reduced Model
PSO Hoo Reduced Model

81
(5.13)
Another objective of their work was to find an optimal W(s) such that the cost function:
(5.14)
is minimized under the constraint:
1 (5.15)
where Wβ(s) is also a frequency weighting function.
Minimizing both JG and JW for an infinite number of frequency points is impossible.
However, minimizing an approximate JG and JW over a certain range of interest is possible and is
adopted in practice.
To improve the GA performance, the “generational” optimization power of crossover of
an evolving population is combined with the Lamarckism “inheritance”. A Boltzmann type of
learning is realized by simulated annealing (SA) which asserts a probability of retaining possible
search directions.
An existing chromosome Ck will mutate to chromosome C with a probability:
| min exp , 1 (5.16)
where kB is set to 5×10–5, the annealing temperature T decreases from Tini exponentially at a rate
of βj–1 where β < 1 is the annealing factor and the integer 1, is the annealing cycle.

82
The final temperature Tfinal is determined by how tight the fine tuning should be bounded at the
end of the learning process. They set β = 30%, Tini = 105, Tfinal = 1, and jmax = 10.
50% of the wining chromosomes will be trained for Lamarkian heredity. The new
population will contain winning individuals and 25% of the parents.
Chen and Li used the following 4th order example to test their GA H∞ Model Reduction
approach:
. . . .
. . . .
(5.17)
with the following frequency weighing function:
.
(5.18)
They reduced the above example into a 2nd order model using the norm of eq. (5.13) and
they resulted with the following reduced order model:
. . . . .
(5.19)
Using the same frequency weighing function of eq. (5.18) and the weighted H∞ norm of
eq. (5.13), we used PSO to find a 2nd order reduced model for the 4th order example of eq. (5.17)
and resulted with the following reduced order model:
. . . . .
(5.20)
Table 5.3 below compares our result to the results of previous researches:

83
Table 5.3: Weighted H∞ Norm Model Reduction Results:
Model Reduction Approach 2nd order
Lower Bound ( Hankel Singular Value) 2.704
Latham & Anderson (1986) 20.08
Chiang & Safonov (1992) 11.71
Zhou (1995) (Algorithm I) 4.827
Zhou (1995) (Algorithm II) 4.822
Al-Amer (1998) 4.629
Tan & Li (1996): GA Approach 4.517
PSO Approach 4.4899
Note that our PSO results outperformed all previous results in the sense of the weighted
H∞ norm of the error between the original model and the reduced order model.

Chapter 6
L1 Norm Model Reduction
onsider the general signal norm representation of eq.(4.1). Since we are studying
the L1 norm in this chapter, we set p in the equation to 1. The L1 norm of the
signal y(t) becomes as follows (Hartley et al., 1998):
| | (6.1)
The L1 norm of the system with transfer function G(s) and impulse response g(t) on the
other hand is defined as (Doyle, Francis & Tannenbaum, 1990):
| |∞ (6.2)
In the following sections, we will use the L1 Norm Model Reduction approach to reduce
the 4th order Wilson system of eq. (4.9) into a 2nd order reduced model, and the 9th order Boiler
system of eq. (4.11) into a 3rd order reduced model. The L1 Norm fitness function of eq. (1.8)
C

85
was implemented in MATLAB using trapezoidal numerical integration which computes an
approximate integral of the error between the impulse response of the original system and the
impulse response of the reduced order system with respect to time with the same stability
constraint explained in Chapter 4.
6.1 GA Approach Results:
The same GA settings as in eq. (4.13) were used to perform the model reduction for both
the Wilson System and the Boiler System in this chapter.
The following system represents the 2nd order result of the L1 Norm Model Reduction
approach on the 4th order Wilson System:
0.4424 0.5342.786 3.64 0.153
0.2807
0.08699 0.06831
(6.3)
The GA reached the above result after 8,852 iterations at about 0.85 seconds per
iteration, and it stopped after the stall generation limit was exceeded.
The following system on the other hand represents the 3rd order result of the L1 Norm
Model Reduction approach on the 9th order Boiler System:
11.09 4.571 9.02613.88 12.67 0.41652.227 10.96 7.111
11.717.382.852
15.31 3.912 1.684
(6.4)

86
The GA reached the above result after 43,128 iterations at about 0.96 seconds per
iteration, and it also stopped after the stall generation limit was exceeded.
6.2 PSO Approach Results:
At first, we used the same settings of eq. (4.18) to reduce the Wilson system and the
Boiler system. The PSO converged for the Boiler but got stuck at some local minima while
reducing the Wilson system. We tried decreasing and increasing the maximum velocity of a
particle (mv) but with no success. Finally, we increased the epoch when inertial weight at final
value step by step until the value 10,000 converged to a solution.
The following system represents the 2nd order result of the L1 Norm Model Reduction
approach on the 4th order Wilson System:
2.563 0.44361.914 1.55 0.162
0.0913
0.2252 0.4653
(6.5)
The PSO reached the above result after 10,933 iterations at about 0.78 seconds per
iteration, and it stopped after the stall generation limit was exceeded.
The 3rd order result of the L1 Norm Model Reduction approach on the 9th order Boiler
System is given below:

87
22.39 15.4 36.727.205 11.16 8.467
2.617 3.022 2.375
14.7715.326.453
7.173 1.743 11.6
(6.6)
The PSO reached the above result after 5,380 iterations at about 0.82 seconds per
iteration, and it also stopped after the stall generation limit was exceeded.
6.3 Comparative Study of the Two Approaches:
Figures 6.1 and 6.2 compare the convergence rates of both the GA and the PSO for the
Wilson system and the Boiler system respectively. Note that in both cases, the GA converges
faster towards the solution than does the PSO.
Figure 6.1: Wilson: Convergence rate of GA and PSO.
0 50 100 150 200 250 300 350 400 450 50010-4
10-3
10-2
10-1
100
101
Generations
Gbe
st
L1 Model Reduction of Wilson System
GA Model Reduction ApproachPSO Model Reduction Approach

88
Figure 6.2: Boiler: Convergence rate of GA and PSO.
The following sections will compare Wilson’s result of eq.(4.23) to the results of the GA
and the PSO approaches, as well as comparing the GA results of the Boiler system model
reduction to those of the PSO.
6.3.1 Steady State Errors and Norms:
Tables 6.1 and 6.2 compare the steady state errors (SSE) and the H2, H∞ and L1 norms of
the reduced order models for both the Wilson System and the Boiler System respectively.
0 500 1000 1500 2000 2500 3000 3500 4000 4500 500010
-1
100
101
102
L1 Model Reduction of Boiler System
Generations
Gbe
st
GA Model Reduction ApproachPSO Model Reduction Approach
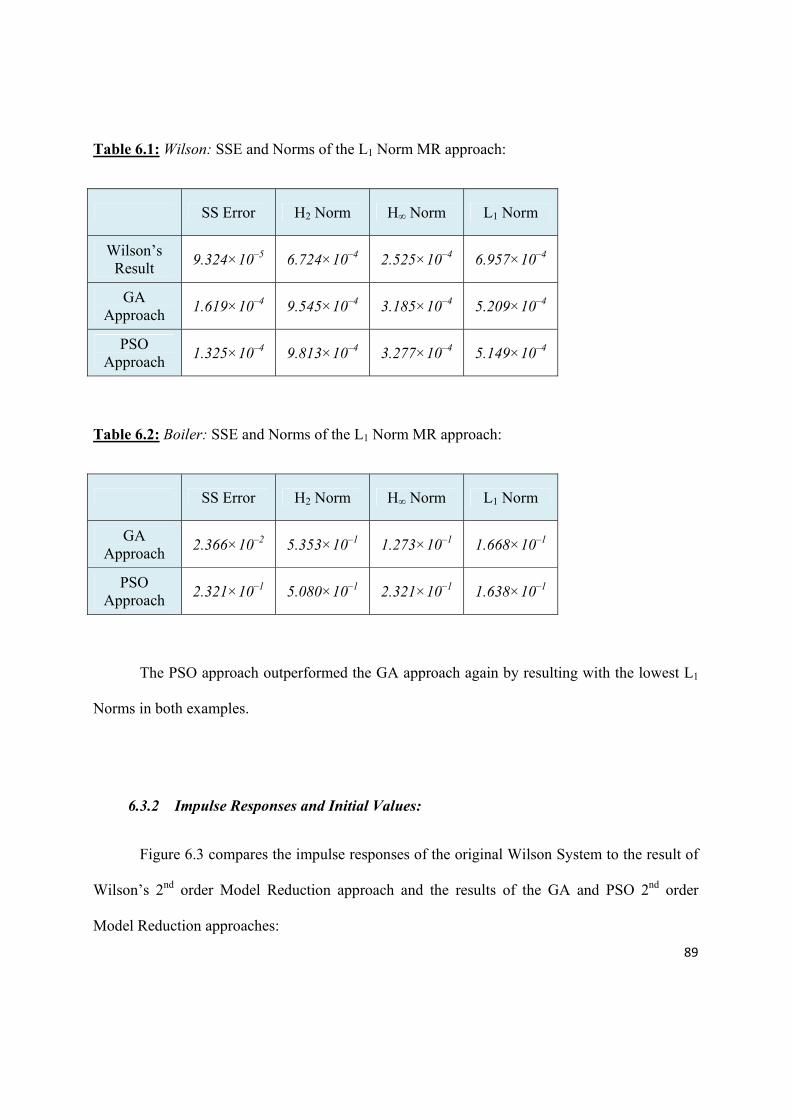
89
Table 6.1: Wilson: SSE and Norms of the L1 Norm MR approach:
SS Error H2 Norm H∞ Norm L1 Norm
Wilson’s Result 9.324×10–5 6.724×10–4 2.525×10–4 6.957×10–4
GA Approach 1.619×10–4 9.545×10–4 3.185×10–4 5.209×10–4
PSO Approach 1.325×10–4 9.813×10–4 3.277×10–4 5.149×10–4
Table 6.2: Boiler: SSE and Norms of the L1 Norm MR approach:
SS Error H2 Norm H∞ Norm L1 Norm
GA Approach 2.366×10–2 5.353×10–1 1.273×10–1 1.668×10–1
PSO Approach 2.321×10–1 5.080×10–1 2.321×10–1 1.638×10–1
The PSO approach outperformed the GA approach again by resulting with the lowest L1
Norms in both examples.
6.3.2 Impulse Responses and Initial Values:
Figure 6.3 compares the impulse responses of the original Wilson System to the result of
Wilson’s 2nd order Model Reduction approach and the results of the GA and PSO 2nd order
Model Reduction approaches:

90
Figure 6.3: Wilson: Impulse Responses of the L1 Norm MR approach.
Figure 6.4 zooms into the above figure to compare the initial responses of the four
different systems:
0 1 2 3 4 5 6-0.01
-0.005
0
0.005
0.01
0.015
0.02Impulse Response
Time (sec)
Ampl
itude
Original Wilson ModelReduced Wilson ModelL1 GA Reduced ModelL1 PSO Reduced Model

91
Figure 6.4: Wilson: Initial Values of the L1 Norm MR approach.
Figure 6.5 compares the impulse responses of the original Boiler System to the results of
the GA and PSO 3rd order Model Reduction approaches:
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
-6
-5
-4
-3
-2
-1
0
1
2x 10
-3 Impulse Response
Time (sec)
Ampl
itude
Original Wilson ModelReduced Wilson ModelL1 GA Reduced ModelL1 PSO Reduced Model

92
Figure 6.5: Boiler: Impulse Responses of the L1 Norm MR approach.
Figure 6.6 zooms into the above figure to compare the initial responses of the three
systems:
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9-20
0
20
40
60
80
100
120
140
160Impulse Response
Time (sec)
Ampl
itude
Original ModelGA L1 Reduced ModelPSO L1 Reduced Model

93
Figure 6.6: Boiler: Initial Values of the L1 Norm MR approach.
Note that the impulse responses of the reduced order Boiler and Wilson models highly
resemble those of the original systems, and their initial values are also relatively close to those of
the original systems.
6.3.3 Step Responses:
Figure 6.7 compares the step responses of the original Wilson System to the result of
Wilson’s 2nd order Model Reduction approach and the results of the GA and PSO 2nd order
Model Reduction approaches:
0 0.002 0.004 0.006 0.008 0.01 0.012145
146
147
148
149
150
151
152
153
154
155
156Impulse Response
Time (sec)
Ampl
itude
Original ModelGA L1 Reduced ModelPSO L1 Reduced Model

94
Figure 6.7: Wilson: Step Responses of the L1 Norm MR approach.
Figure 6.8 compares the step responses of the original Boiler System to the results of the
GA and PSO 3rd order Model Reduction approaches:
0 1 2 3 4 5 6-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03Step Response
Time (sec)
Ampl
itude
Original Wilson ModelReduced Wilson ModelL1 GA Reduced ModelL1 PSO Reduced Model

95
Figure 6.8: Boiler: Step Responses of the L1 Norm MR approach.
It can be noted from figures 6.7 and 6.8 that the step responses of the reduced order
Wilson and Boiler models highly resemble those of the original system.
6.3.4 Frequency Responses:
Figure 6.9 compares the frequency responses of the original Wilson System to the result
of Wilson’s 2nd order Model Reduction approach and the results of the GA and PSO 2nd order
Model Reduction approaches:
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
2
4
6
8
10
12
14Step Response
Time (sec)
Ampl
itude
Original ModelGA L1 Reduced ModelPSO L1 Reduced Model
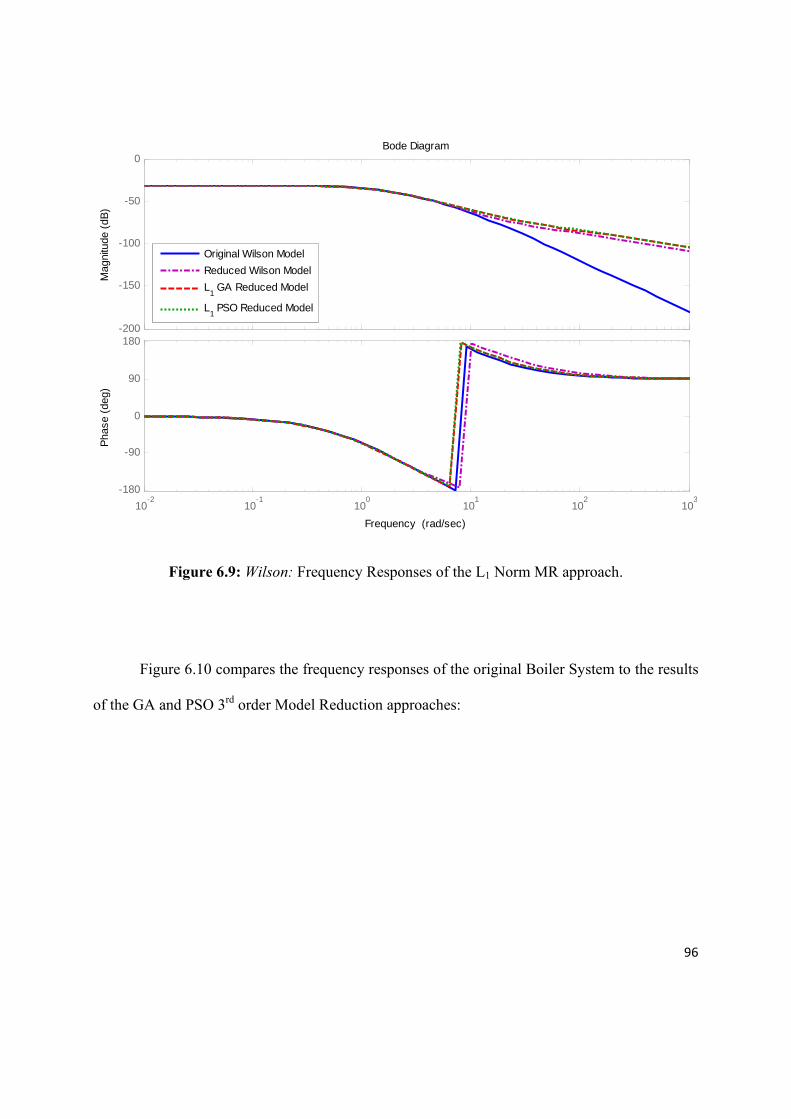
96
Figure 6.9: Wilson: Frequency Responses of the L1 Norm MR approach.
Figure 6.10 compares the frequency responses of the original Boiler System to the results
of the GA and PSO 3rd order Model Reduction approaches:
-200
-150
-100
-50
0
Mag
nitu
de (d
B)
10-2
10-1
100
101
102
103
-180
-90
0
90
180
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Original Wilson ModelReduced Wilson ModelL1 GA Reduced Model
L1 PSO Reduced Model

97
Figure 6.10: Boiler: Frequency Responses of the L1 Norm MR approach.
Note that the frequency response behavior of the L1 reduced order models is similar to
those of the reduced order models in previous chapters at high frequencies. However, since most
real-time physical systems operate at low frequencies, the high frequency error can be ignored.
6.4 GA and PSO L1 Norm Model Reduction Approaches vs. Previous Studies:
As stated before in section 4.4.1, Maust and Feliachi (1998) reduced the Wilson System of
eq. (4.9) using Genetic Algorithms and both H2 and L1 Norms. They claim that the L1 Norm
-20
-10
0
10
20
30
Mag
nitu
de (d
B)
10-1
100
101
102
103
-135
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Original ModelGA L
1 Reduced Model
PSO L1 Reduced Model

98
model reduction result they achieved was similar to that achieved by Wilson (1970) with a
2.004×10–3 norm value. Table 6.1 illustrates that the result of this study’s proposed GA approach
is better than that of Maust and Feliachi in terms of L1 Norms, and the PSO results of Table 6.1
obviously outperform those of the GA.

Chapter 7
Hybrid Norm Model Reduction
he use of different norms gives rise to different approximations since different
norms favors different time-domain or frequency-domain characteristics of the
system. However, it is sometimes desirable to obtain a reduced order model with certain
desirable characteristics that might not be achievable by the use of a single norm. Therefore, we
propose the following hybrid norm criterion to obtain better compromised reduced order models:
The Hybrid Norm was defined as follows:
(7.1)
We use two different Hybrid Norm Model Reduction approaches to reduce the 4th order
Wilson system of eq. (4.9) and the 9th order Boiler system of eq. (4.11).
T

100
7.1 Hybrid between H2 and H∞ Norms:
The first Hybrid Norm used was between H2 and H∞ Norms where α = β = 1, and γ = 0.
7.1.1 GA Approach Results:
The same GA settings as in eq.(4.13) were used to perform the model reduction for both
the Wilson System and the Boiler system in this section.
The following system represents the 2nd order result of the first Hybrid Norm Model
Reduction approach on the 4th order Wilson System:
1.029 0.029860.7105 2.741 0.5345
0.3102
0.3347 0.5891
(7.2)
The GA reached the above result after 10,143 iterations at about 1.40 seconds per
iteration, and it stopped after the stall generation limit was exceeded.
The following system on the other hand represents the 3rd order result of the first Hybrid
Norm Model Reduction approach on the 9th order Boiler System:
6.011 5.836 4.0558.45 10.8 5.94412.52 17 15.5
10.27
3.8359.24
3.857 3.153 10.87
(7.3)
The GA reached the above result after 11,012 iterations at about 1.60 seconds per
iteration, and it also stopped after the stall generation limit was exceeded.

101
7.1.2 PSO Approach Results:
The PSO settings used to perform the model reduction for both the Wilson and Boiler
Systems were similar to those of eq. (4.18) except the maximum velocity of a particle was set to
3, and the epoch when inertial weight at final value was set to 10,000.
The following system represents the 2nd order result of the first Hybrid Norm Model
Reduction approach on the 4th order Wilson System:
3.652 2.7931 0 1
0
0.003516 0.07387
(7.4)
The PSO reached the above result after 10,769 iterations at about 1.10 seconds per
iteration, and it stopped after the stall generation limit was exceeded.
The 3rd order result of the first Hybrid Norm Model Reduction approach on the 9th order
Boiler System is given below:
5.051 8.524 0.703626.56 20.56 13.4915.59 2.529 16.91
1.859
7.8884.772
20.02 3.646 33.64
(7.5)
The PSO reached the above result after 16,743 iterations at about 1.21 seconds per
iteration, and it also stopped after the stall generation limit was exceeded.
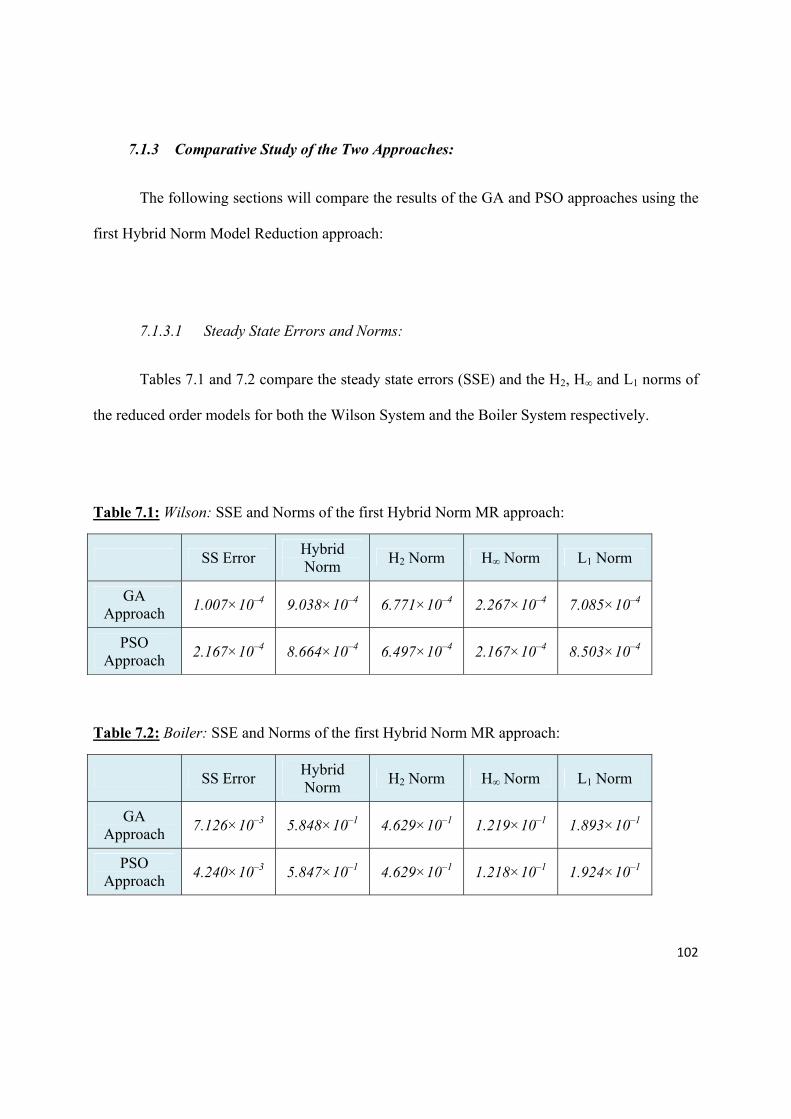
102
7.1.3 Comparative Study of the Two Approaches:
The following sections will compare the results of the GA and PSO approaches using the
first Hybrid Norm Model Reduction approach:
7.1.3.1 Steady State Errors and Norms:
Tables 7.1 and 7.2 compare the steady state errors (SSE) and the H2, H∞ and L1 norms of
the reduced order models for both the Wilson System and the Boiler System respectively.
Table 7.1: Wilson: SSE and Norms of the first Hybrid Norm MR approach:
SS Error Hybrid Norm H2 Norm H∞ Norm L1 Norm
GA Approach 1.007×10–4 9.038×10–4 6.771×10–4 2.267×10–4 7.085×10–4
PSO Approach 2.167×10–4 8.664×10–4 6.497×10–4 2.167×10–4 8.503×10–4
Table 7.2: Boiler: SSE and Norms of the first Hybrid Norm MR approach:
SS Error Hybrid Norm H2 Norm H∞ Norm L1 Norm
GA Approach 7.126×10–3 5.848×10–1 4.629×10–1 1.219×10–1 1.893×10–1
PSO Approach 4.240×10–3 5.847×10–1 4.629×10–1 1.218×10–1 1.924×10–1

103
7.1.3.2 Impulse Responses and Initial Values:
Figure 7.1 compares the impulse responses of the original Wilson System to the results of
the GA and PSO 2nd order Model Reduction approaches:
Figure 7.1: Wilson: Impulse Responses of the first Hybrid Norm MR approach.
Figure 7.2 zooms into the above figure to compare the initial responses of the three
different systems:
0 1 2 3 4 5 6-4
-2
0
2
4
6
8
10
12
14
16x 10
-3 Impulse Response
Time (sec)
Ampl
itude
Original Wilson ModelReduced Wilson ModelHybrid
1 GA Reduced Model
Hybrid1 PSO Reduced Model

104
Figure 7.2: Wilson: Initial Values of the first Hybrid Norm MR approach.
Figure 7.3 compares the impulse responses of the original Boiler System to the results of
the GA and PSO 3rd order Model Reduction approaches:
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
-4
-3
-2
-1
0
1
2x 10
-3 Impulse Response
Time (sec)
Ampl
itude
Original Wilson ModelReduced Wilson ModelHybrid
1 GA Reduced Model
Hybrid1 PSO Reduced Model

105
Figure 7.3: Boiler: Impulse Responses of the first Hybrid Norm MR approach.
Figure 7.4 zooms into the above figure to compare the initial responses of the three
systems:
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8-20
0
20
40
60
80
100
120
140
160Impulse Response
Time (sec)
Ampl
itude
Original ModelGA Hybrid
1 Reduced Model
PSO Hybrid1 Reduced Model

106
Figure 7.4: Boiler: Initial Values of the first Hybrid Norm MR approach.
7.1.3.3 Step Responses:
Figure 7.5 compares the step responses of the original Wilson System to the results of the
GA and PSO 2nd order Model Reduction approaches:
0 0.002 0.004 0.006 0.008 0.01 0.012145
146
147
148
149
150
151
152
153Impulse Response
Time (sec)
Ampl
itude
Original ModelGA Hybrid
1 Reduced Model
PSO Hybrid1 Reduced Model

107
Figure 7.5: Wilson: Step Responses of the first Hybrid Norm MR approach.
Figure 7.6 compares the step responses of the original Boiler System to the results of the
GA and PSO 3rd order Model Reduction approaches:
0 1 2 3 4 5 6-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03Step Response
Time (sec)
Ampl
itude
Original Wilson ModelReduced Wilson ModelHybrid
1 GA Reduced Model
Hybrid1 PSO Reduced Model

108
Figure 7.6: Boiler: Step Responses of the first Hybrid Norm MR approach.
7.1.3.4 Frequency Responses:
Figure 7.7 compares the frequency responses of the original Wilson System to the results
of the GA and PSO 2nd order Model Reduction approaches:
0 0.5 1 1.5 2 2.5 3 3.5 4 4.50
2
4
6
8
10
12
14Step Response
Time (sec)
Ampl
itude
Original ModelGA Hybrid
1 Reduced Model
PSO Hybrid1 Reduced Model

109
Figure 7.7: Wilson: Frequency Responses of the first Hybrid Norm MR approach.
Figure 7.8 compares the frequency responses of the original Boiler System to the results
of the GA and PSO 3rd order Model Reduction approaches:
-200
-150
-100
-50
0
Mag
nitu
de (d
B)
10-2
10-1
100
101
102
103
-180
-90
0
90
180
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Original Wilson ModelReduced Wilson ModelHybrid1 GA Reduced Model
Hybrid1 PSO Reduced Model

110
Figure 7.8: Boiler: Frequency Responses of the first Hybrid Norm MR approach.
Note that the impulse responses, initial values and step responses of all reduced order
models highly resemble those of the original systems. Also, the frequency response behavior of
the reduced order models closely resembles those of the original systems with some error at high
frequencies that can be ignored.
7.2 Hybrid between H2, H∞ and L1 Norms:
The second Hybrid Norm used was between H2, H∞ and L1 Norms where α = β = γ = 1.
-20
-10
0
10
20
30
Mag
nitu
de (d
B)
10-1
100
101
102
103
-135
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Original ModelGA Hybrid1 Reduced Model
PSO Hybrid1 Reduced Model

111
7.2.1 GA Approach Results:
The same GA settings as in eq.(4.13) were used to perform the model reduction for both
the Wilson System and the Boiler system in this section.
The following system represents the 2nd order result of the second Hybrid Norm Model
Reduction approach on the 4th order Wilson System:
1.121 0.04663.752 2.813 0.02225
0.007088
0.6188 1.292
(7.6)
The GA reached the above result after 6,449 iterations at about 1.50 seconds per iteration,
and it stopped after the stall generation limit was exceeded.
The following system on the other hand represents the 3rd order result of the second
Hybrid Norm Model Reduction approach on the 9th order Boiler System:
3.386 5.843 7.6482.665 9.198 22.013.953 5.894 18.95
4.9977.693
7.099
2.8 11.64 6.937
(7.7)
The GA reached the above result after 21,090 iterations at about 1.66 seconds per
iteration, and it also stopped after the stall generation limit was exceeded.

112
7.2.2 PSO Approach Results:
The PSO settings used to perform the model reduction for both the Wilson and Boiler
Systems were similar to those of eq. (4.18) except the maximum velocity of a particle was set to
3, and the Epoch when inertial weight at final value was set to 10,000.
The following system represents the 2nd order result of the second Hybrid Norm Model
Reduction approach on the 4th order Wilson System:
3.852 2.9061 0 1
0
0.004068 0.07726
(7.8)
The PSO reached the above result after 10,033 iterations at about 1.15 seconds per
iteration, and it stopped after the stall generation limit was exceeded.
The 3rd order result of the second Hybrid Norm Model Reduction approach on the 9th
order Boiler System is given below:
8.64 10.06 6.5065.201 0.4313 4.56733.39 5.159 23.5
1.0883.49117.47
18.73 17.98 11.16
(7.9)
The PSO reached the above result after 37,392 iterations at about 1.25 seconds per
iteration, and it also stopped after the stall generation limit was exceeded.

113
7.2.3 Comparative Study of the Two Approaches:
The following sections will compare the results of the GA and PSO approaches using the
second Hybrid Norm Model Reduction approach:
7.2.3.1 Steady State Errors and Norms:
Tables 7.3 and 7.4 compare the steady state errors (SSE) and the H2, H∞ and L1 norms of
the reduced order models for both the Wilson System and the Boiler System respectively.
Table 7.3: Wilson: SSE and Norms of the second Hybrid Norm MR approach:
SS Error Hybrid Norm H2 Norm H∞ Norm L1 Norm
GA Approach
7.976×10–5 1.615×10–3 7.614×10–4 2.584×10–4 5.947×10–4
PSO Approach
8.432×10–5 1.586×10–3 7.027×10–4 2.425×10–4 6.412×10–4
Table 7.4: Boiler: SSE and Norms of the second Hybrid Norm MR approach:
SS Error Hybrid Norm H2 Norm H∞ Norm L1 Norm
GA Approach 8.715×10–3 7.652×10–1 4.726×10–1 1.231×10–1 1.695×10–1
PSO Approach 2.489×10–2 7.643×10–1 4.691×10–1 1.227×10–1 1.725×10–1

114
7.2.3.2 Impulse Responses and Initial Values:
Figure 7.9 compares the impulse responses of the original Wilson System to the results of
the GA and PSO 2nd order Model Reduction approaches:
Figure 7.9: Wilson: Impulse Responses of the second Hybrid Norm MR approach.
Figure 7.10 zooms into the above figure to compare the initial responses of the three
different systems:
0 1 2 3 4 5 6-5
0
5
10
15
20x 10
-3 Impulse Response
Time (sec)
Ampl
itude
Original Wilson ModelReduced Wilson ModelHybrid2 GA Reduced Model
Hybrid2 PSO Reduced Model
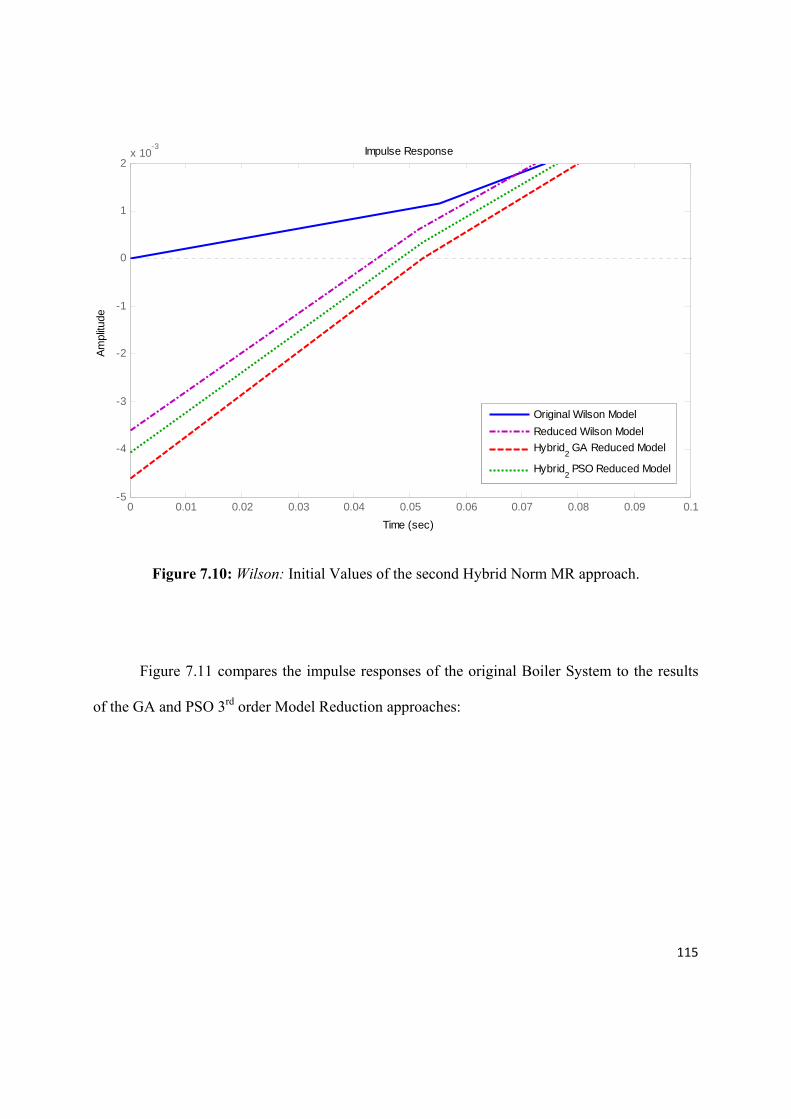
115
Figure 7.10: Wilson: Initial Values of the second Hybrid Norm MR approach.
Figure 7.11 compares the impulse responses of the original Boiler System to the results
of the GA and PSO 3rd order Model Reduction approaches:
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-5
-4
-3
-2
-1
0
1
2x 10
-3 Impulse Response
Time (sec)
Ampl
itude
Original Wilson ModelReduced Wilson ModelHybrid2 GA Reduced Model
Hybrid2 PSO Reduced Model

116
Figure 7.11: Boiler: Impulse Responses of the second Hybrid Norm MR approach.
Figure 7.12 zooms into the above figure to compare the initial responses of the three
systems:
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8-20
0
20
40
60
80
100
120
140
160Impulse Response
Time (sec)
Ampl
itude
Original ModelGA Hybrid2 Reduced Model
PSO Hybrid2 Reduced Model

117
Figure 7.12: Boiler: Initial Values of the second Hybrid Norm MR approach.
7.2.3.3 Step Responses:
Figure 7.13 compares the step responses of the original Wilson System to the results of
the GA and PSO 2nd order Model Reduction approaches:
0 0.002 0.004 0.006 0.008 0.01 0.012145
146
147
148
149
150
151
152
153Impulse Response
Time (sec)
Ampl
itude
Original ModelGA Hybrid
2 Reduced Model
PSO Hybrid2 Reduced Model

118
Figure 7.13: Wilson: Step Responses of the second Hybrid Norm MR approach.
Figure 7.14 compares the step responses of the original Boiler System to the results of the
GA and PSO 3rd order Model Reduction approaches:
0 1 2 3 4 5 6-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03Step Response
Time (sec)
Ampl
itude
Original Wilson ModelReduced Wilson ModelHybrid2 GA Reduced Model
Hybrid2 PSO Reduced Model

119
Figure 7.14: Boiler: Step Responses of the second Hybrid Norm MR approach.
7.2.3.4 Frequency Responses:
Figure 7.15 compares the frequency responses of the original Wilson System to the
results of the GA and PSO 2nd order Model Reduction approaches:
0 0.5 1 1.5 2 2.5 3 3.5 4 4.50
2
4
6
8
10
12
14Step Response
Time (sec)
Ampl
itude
Original ModelGA Hybrid
2 Reduced Model
PSO Hybrid2 Reduced Model

120
Figure 7.15: Wilson: Frequency Responses of the second Hybrid Norm MR approach.
Figure 7.16 compares the frequency responses of the original Boiler System to the results
of the GA and PSO 3rd order Model Reduction approaches:
-200
-150
-100
-50
0
Mag
nitu
de (d
B)
10-2
10-1
100
101
102
103
-180
-90
0
90
180
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Original Wilson ModelReduced Wilson ModelHybrid
2 GA Reduced Model
Hybrid2 PSO Reduced Model

121
Figure 7.16: Boiler: Frequency Responses of the second Hybrid Norm MR approach.
The impulse responses, initial values and step responses of all reduced order models
highly resemble those of the original systems. The frequency response behavior of the reduced
order models also closely resembles those of the original systems with some ignorable error at
high frequencies.
7.3 Comparison between the Two Hybrid Norms:
The use of hybrid norm results with a compromised reduced order model that is low in
two or three different norms. The first hybrid norm worked at obtaining a reduced order model
-20
-10
0
10
20
30
Mag
nitu
de (d
B)
10-1
100
101
102
103
-135
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
Original ModelGA Hybrid2 Reduced Model
PSO Hybrid2 Reduced Model

122
with low H2 and H∞ norms, while the second hybrid norm worked at obtaining a reduced order
model that is law in all three norms (H2, H∞ and L1).
However, since the model reduction was based on different norms that favor different
characteristics of the system, each individual norm in the hybrid norm result was not as good as
the norm achieved using that norm’s reduction alone. For example, the H2 norms of the hybrid
norm reduced order models are not as good as the H2 norm achieved by H2 norm model
reduction. However, the hybrid norm, results with a better combination between all norms of
concern.
Similarly, note that the results of the first hybrid norm have a good H2–H∞ combination
but with relatively high L1 norms. The second hybrid norm takes the L1 norm into consideration,
and therefore does not do as well as the first hybrid norm for both H2 and H∞ norms, but rather
results with a better combination between all three norms.
It is also obvious that the PSO tends to perform better that the GA by resulting with lower
hybrid norm for all the presented examples.

Chapter 8
Conclusion & Future Work
odern engineering systems such as telecommunication systems, transmission
lines, and chemical reactors are complex in nature. Their detailed mathematical
modeling leads to high order dynamic systems.
For simplicity of simulation, interpretation, and control of such processes it is desirable to
represent the dynamics of these high order systems by lower order models. However, most of the
available optimal model reduction techniques follow computationally demanding, time
consuming, iterative procedures that usually result in non-robustly stable models with poor
frequency response resemblance to the original high order model in some frequency ranges.
Genetic Algorithms (GA) and Particle Swarm Optimization (PSO) are two of the most
powerful optimization tools. They were used to find optimum reduced models for two complex
high order SISO models using H2 Norm, H∞ Norm, L1 Norm, and two different Hybrid Norms.
M

124
The use of GA and PSO in Model reduction helped simplify and automate the model reduction
process. They help one avoid tedious iterative mathematical time consuming procedures (leading
often to local optimum solutions) while obtaining very satisfying results.
GAs and PSO helps us obtain solutions to problems for which analytical solutions are not
available and for which classical optimization techniques can give at best local solutions that are
sensitive to initial guesses.
However, it is convenient to mention here that although optimal model reduction using
Genetic Algorithms and Particle Swarm Optimization seem very attractive; they suffer from one
major drawback.
There is no systematic way in theory to find the appropriate settings of either the GA or
the PSO for a certain application. In fact, trial and error is the only method used by all
researchers in the area of those two evolutionary algorithms. And thus, finding the correct
appropriate settings to work your application could be time consuming.
The settings used for the GA however, worked for all the model reduction examples we
tried with different orders, while the PSO gave us a hard time to find the right settings for each
example.
Moreover, if you try to reduce a different system using PSO, the same set of settings used
in this thesis might not work. In fact, if certain set of settings work for a certain system in H2
Norm Model Reduction for example; they might not work for H∞, L1, or Hybrid Norm Model
Reduction of the same system.

125
Therefore one should start with the default settings of the PSO, and if they do not work;
one shall start altering the rest of the parameters one by one, and try to draw a conclusion on the
effect of certain parameters on reducing the given system, and then decrease or increase the
parameters accordingly.
The population size of the GA and the swarm size of the PSO do not affect their
probability of convergence to a solution. However, we noted that GA converges faster to the
solution than does the PSO in almost all cases.
Decreasing the inertial weights at the final iterations in the PSO, decreases the effect of
the particles’ velocity whilst increasing the effect of the particles’ best achieved fitness value and
the global best achieved fitness value of the swarm, and therefore helps fine tune the result at the
final iterations.
Increasing the maximum particle velocity in the PSO, increases the convergence speed of
the PSO. However, a very high maximum particle velocity value might cause the PSO to miss the
solution and get trapped in local minima. On the other hand, a too small maximum particle
velocity value limits the search space of the PSO.
Comparing the GA results to the PSO results; it was found that PSO outperformed the
GA in the norm sense by leading to better (lower) norms. Also, it is noted that the simplicity of
the computations in the PSO Algorithm in comparison to the GA Algorithm makes it much faster
time-wise, but the GA tends to converge faster close to the solution iteration-wise. Therefore we
can conclude that PSO has the same effectiveness as GA in finding the global optimal solution
but with significantly better computational efficiency (Hassan et al., 2005).

126
Tables 8.1 and 8.2 summarize the results of this thesis study:
Table 8.1: Summary of the Wilson System Results:
SS Error H2 Norm H∞ Norm L1 Norm
H2 model reduction
GA 9.780×10–5 6.556×10–4 2.729×10–4 7.759×10–4
PSO 1.968×10–4 6.450×10–4 2.405×10–4 8.678×10–4
H∞ model reduction
GA 2.144×10–6 6.601×10–4 2.239×10–4 7.818×10–4
PSO 2.144×10–4 6.593×10–4 2.144×10–4 8.123×10–4
L1 model reduction
GA 1.619×10–4 9.545×10–4 3.185×10–4 5.209×10–4
PSO 1.325×10–4 9.813×10–4 3.277×10–4 5.149×10–4
Hybrid red. α = β = 1
GA 1.007×10–4 6.771×10–4 2.267×10–4 7.085×10–4
PSO 2.167×10–4 6.497×10–4 2.167×10–4 8.503×10–4
Hybrid red. α = β = γ = 1
GA 7.976×10–5 7.614×10–4 2.584×10–4 5.947×10–4
PSO 8.432×10–5 7.027×10–4 2.425×10–4 6.412×10–4

127
Table 8.2: Summary of the Boiler System Results:
SS Error H2 Norm H∞ Norm L1 Norm
H2 model reduction
GA 1.242×10–2 4.629×10–1 1.221×10–1 1.880×10–1
PSO 4.353×10–3 4.628×10–1 1.220×10–1 1.911×10–1
H∞ model reduction
GA 1.126×10–1 6.844×10–1 1.127×10–1 3.154×10–1
PSO 1.275×10–3 6.917×10–1 1.116×10–1 3.137×10–1
L1 model reduction
GA 2.366×10–2 5.353×10–1 1.273×10–1 1.668×10–1
PSO 2.321×10–1 5.080×10–1 2.321×10–1 1.638×10–1
Hybrid red. α = β = 1
GA 7.126×10–3 4.629×10–1 1.219×10–1 1.893×10–1
PSO 4.240×10–3 4.629×10–1 1.218×10–1 1.924×10–1
Hybrid red. α = β = γ = 1
GA 8.715×10–3 4.726×10–1 1.231×10–1 1.695×10–1
PSO 2.489×10–2 4.691×10–1 1.227×10–1 1.725×10–1
We can also conclude from the above results that as expected, the H2 Norm Model
Reduction Approach always leads to the minimum H2 Norm, the H∞ Norm Model Reduction
Approach always leads to the minimum H∞ Norm, and the L1 Norm Model Reduction Approach
always leads to the minimum L1 Norm. The Hybrid Norm Model Reduction Approach on the
other hand resulted in compromised results between all norms.

128
It is also concluded from the results of Table 4.5, and figures 4.1 to 4.24 that the higher
the order of the reduced order model, the lower the norm, and the higher the resemblance to the
original system.
The contributions of this thesis work are summarized below:
1. This work is the first to solve the H2, H∞ and L1 Model Reduction problems using
Particle Swarm Optimization.
2. A computationally attractive and analytically simple model reduction approach
based on meta-heuristic optimization algorithms is introduced.
3. A comprehensive evaluation and comparison of Genetic Algorithms and Particle
Swarm Optimization for optimal model reduction using H2, H∞, or L1 Norms is
presented.
4. A hybrid Norm Model reduction criteria of all and two of the three model norms
being studied (L1, H2 and H∞) are introduced. The hybrid norm model reduction
approach helped us obtain better compromised reduced order models.
5. Improved reduced order models are obtained for benchmark model reduction
problems.
6. Optimal parameters of the GA and PSO algorithms for Model Reduction are
obtained.
7. An improved PSO is proposed and showed better performance for Model
Reduction Problems.

129
The work in this thesis treats linear continuous time dynamic systems. Model Reduction
of linear discrete time dynamic systems can be performed similarly using approach of this thesis
in discrete time or via bilinear transformation.
Some possible future research area in Model Reduction could be upgrading the
MATLAB code to take MIMO systems, and study the performances of GA and PSO in reducing
MIMO systems. Another possible research area would be to study H2, H∞, or L1 Norms Model
Reduction with some constraints on the norms, zeroes of the reduced order model, steady state
error, or any other aspect of the system.
Optimal closed-loop controller reduction using GA and PSO is another possible future
research area.

References
Al-Amer, S.H.H. (1998). New Algorithms for H∞-Norm Approximation and Applications. Ph. D.
Thesis, King Fahad University of Petroleum & Minerals, Dhaaran, KSA.
Al-Saggaf, U.M. and Bettayeb, M. (1993). Techniques in Optimized Model Reduction for High
Dimensional Systems. Control and Dynamic Systems, Digital and Numeric Techniques and
their Application in Control Systems, 55(1): 51-109.
Anic, B. (2008). An interpolation-based approach to the weighted H2 model reduction problem.
Master Thesis, Virginia Polytechnic Institute and State University, USA.
Assunção, E. and Peres, P.L.D. (1999a). H2 and/or H∞-Norm Model Reduction of Uncertain
Discrete-time Systems. Proceedings of the American Control Conference, San Diego,
California, USA, pp. 4466-4470.

131
Assunção, E. and Peres, P.L.D. (1999b). A Global Optimization Approach for the H2-Norm
Model Reduction Problem. Proceedings of the 38th Conference on Decision and Control,
Phoenix, Arizona, USA, pp. 1857-1862.
Beattie, C.A. and Gugercin, S. (2007). Krylov-Based Minimization for Optimal H2 Model
Reduction. Proceedings of the 46th IEEE Conference on Decision and Control, New Orleans,
LA, USA, pp. 4385-4390.
Bettayeb, M. (1981). Approximation of Linear Systems: New Approaches based on Singular
Value Decomposition. Ph.D. Thesis, University of Southern California, Los Angeles.
Bettayeb, M. and Kavranoğlu, D. (1993). Performance Evaluation of A New H∞ Norm Model
Reduction Scheme. Proc. 1993 IEEE CDC, San Antonio, USA, pp. 2913-2914.
Bettayeb, M. and Kavranoğlu, D. (1994). Reduced Order H∞ Filtering. Proc. ACC 94,
Baltimore, pp. 1884-1888.
Bettayeb, M. and Kavranoğlu, D. (1995). An Iterative Scheme for Rational H∞ Approximation.
Proceedings of ECCTD-95, Istanbul, Turkey, pp. 905-908.
Bettayeb, M., Silverman, L.M., and Safonov, M.G. (1980). Optimal Approximation of
Continuous Time Systems. Proc. 19th IEEE CDC, Albuquerque, New Mexico, USA.
Birge, B. (2003). PSOt – A Particle Swarm Optimization Toolbox for Use with MATLAB. IEEE
Swarm Intelligence Symposium Proceedings, pp. 182-186.
Buckles, B.P. and Petty, F.E. (1992). Genetic Algorithms. New York: IEEE Computer Society
Press.

132
Chen, C.F. and Shieh, L.S. (1968). A Novel Approach to Linear Model Simplification.
International Journal on Control, 8, 561-570.
Chiang, R.Y. and Safonov, M.G. (1992). Robust Control Toolbox, The Mathworks, Inc.
Chidambara, M.R. (1967). Further Comments by M.R. Chidambara, IEEE Transaction on
Automatic Control, AC-12, 799-800.
Chidambara, M.R. (1969), Two Simple Techniques for the Simplification of Large Dynamic
Systems. Proceedings of the 1969 JACC, 669-674.
Chipperfield, A., Fleming, P.J., Pohlheim, H. and Fonseca, C.M. (2004). Genetic Algorithm
Toolbox for Use with MATLAB®, Department of Automatic Control and Systems
Engineering, University of Sheffield.
Clerc, M. and Kennedy, J. (2002). The Particle Swarm: Explosion, Stability, and Convergence in
a Multi-Dimensional Complex Space. IEEE Transaction on Evolutionary Computation,
6(1): 58-73.
Davis, L. (1991). Handbook of Genetic Algorithms. New York: Van Nostrand.
Davison, E.J. (1966). A Method for Simplifying Linear Dynamic Systems. IEEE Transaction on
Automatic Control, AC-11, 93-101.
Davison, E.J. (1967). Further Reply by E.J. Davison. IEEE Transaction on Automatic Control.
AC-12, 800.

133
De Moor, B., Overschee, P.V. and Schelfhout, G. (1993). H2 Model Reduction for SISO Systems.
Proceedings of the 12th IFAC World Congress, The International Federation of Automatic
Control.
Dooren, P.V., Gallivan, K.A. and Absil, P.A. (2008). H2 Optimal Model Reduction of MIMO
Systems. Applied Mathematics Letters, 21(12): 1267-1273.
Doyle, J., Francis, B. and Tannenbaum, A. (1990). Feedback Control Theory, Macmillan
Publishing Co.
Du, H., Lam, J. and Huang, B. (2007). Constrained H2 Approximation of Multiple Input–Output
Delay Systems Using Genetic Algorithm. ISA Transaction, 46(2): 211-221.
Eberhart, R. and Kennedy, J. (1995). A New Optimizer Using Particle Swarm Theory. Sixth Intl.
Symposium on Micro Machine and Human Science, Nagoya, Japan, pp. 39–43.
Ebihara, Y. and Hagiwara, T. (2004). On H∞ Model Reduction Using LMIs. IEEE Transaction
on Automatic Control, 49(7): 1187-1191.
Edwards, K., Edgar, T.F. and Manousiouthakis, V.I. (1998). Kinetic Model Reduction Using
Genetic Algorithm. Computers and Chemical Engineering, 22(1): 239-246.
Eitelberg, E. (1981). Model Reduction by Minimizing the Weighted Equation Error.
International Journal on Control, 34(6): 1113-1123.
El-Attar, R.A. and Vidyasagar, M. (1977). Optimal Order Reduction Using the Induced
Operation Norm. 1977 IEEE Conference on Decision and Control, 16, 406-411.

134
El-Attar, R.A. and Vidyasagar, M. (1978). Order Reduction by l1 and l∞-Norm Minimization.
IEEE Transaction on Automatic Control, AC-23(4): 731-734.
Fleischer, M. (2003). Foundation of Swarm Intelligence: From Principles to Practice.
Conference on Swarming: Network Enabled C4ISR, McLean, Virginia, USA.
Fleming, P.J. and Fonseca, C.M. (1993). Genetic Algorithms in Control Systems Engineering: A
Brief Introduction. In Proc. Inst. Elect. Eng. Colloquium on Genetic Algorithms for Control
Syst. Eng.
Frenzel, J.F. (1993). Genetic Algorithms, A New Breed of Optimization. IEEE Potentials, pp.
21-24.
Fukata, S., Mohri, A. and Takata, M. (1983). Optimization of Linear Systems with Integral
Control for Time-Weighted Quadratic Performance Indices. International Journal on
Control, 37(5): 1057-1070.
Gazi, V. and Passino, K.M. (2003). Stability Analysis of Swarms. IEEE Transaction on
Automatic Control, 48(4): 692-697.
Ge, Y., Collins, E.G., Watson, L.T. and Bernstein, D.S. (1993). A Homotopy Algorithm for the
Combined H2/H∞ Model Reduction Problem. Technical Report: TR-93-15.
Ge, Y., Collins, E.G., Watson, L.T. and Bernstein, D.S. (1997). Globally Convergent Homotopy
Algorithms for the Combined H2/H∞ Model Reduction Problem. Journal of Mathematical
Systems, Estimation and Control, 7(2): 129-155.

135
Gibilaro, L.G. and Lees, F.P. (1969). The Reduction of Complex Transfer Function Models to
Simple Models Using the Method of Moments. Chem. Engng. Sci., 24, 85-93.
Glover, K. (1984), All Optimal Hankel Norm Approximations of Linear Multivariable systems
and their L∞-error Bounds. International Journal on Control, AC-27, 1115-1193.
Goldberg, D.E. (1989). Genetic Algorithms in Search, Optimization, and Machine Learning, 2nd
Edition, Addison-Wesley Publishing Company, Inc.
Gugercin, S., Antoulas, A.C. and Beattie, C.A. (2006). A Rational Krylov Iteration for Optimal
H2 Model Reduction. Proceedings of the 17th International Symposium on Mathematical
Theory of Networks and Systems, Kyoto, Japan, pp. 1665-1667.
Hakvoort, R.G. (1992). Worst-Case System Identification in l1: Error Bounds, Optimal Models
and Model Reduction. Proceedings of the 31st Conference on Decision and Control, pp. 499-
504.
Hartley, T.T., Veillette, R.J., De Abreu Garcia, J.A., Chicatelli, A., and Hartmann, R. (1998). To
Err is Normable: The Computation of Frequency-Domain Error Bounds From Time-
Domain Data. NASA Center for Aerospace Information, U.S.A.
Hassan, R., Cohanim, B., De Weck, O. and Venter, G. (2005). A Comparison of Particle Swarm
Optimization and the Genetic Algorithm. Proceedings of the 46th AIAA Conference, Texas,
USA.

136
Hsu, C.C., Tse, K.M. and Wang, W.Y. (2001). Discrete-Time Model Reduction of Sampled
Systems Using an Enhanced Multiresolutional Dynamic Genetic Algorithm. IEEE
International Conference on Man, and Cybernetics Systems, 1, 280-285.
Hsu, C.C. and Yu, C.H. (2004). Model Reduction of Uncertain Interval Systems Using Genetic
Algorithms. SICE Annual Conference 2004, 1, 264-267.
Hu, X., Eberhart, R. and Shi, Y. (2003). Engineering Optimization with Particle Swarm. IEEE
Swarm Intelligence Symposium, pp. 53-57.
Huang, X.X., Yan, W.Y. and Teo, K.L. (2001). H2 Near-Optimal Model Reduction. IEEE
Transaction on Automatic Control, 46(8): 1279-1284.
Hutton, M. and Friedland, B. (1975). Routh Approximations for Reducing Order of Linear,
Time-Invariant Systems. IEEE Transaction on Automatic Control, AC-20 (3): 329-337.
Hyland, D.C. and Bernstein, D.S. (1985). The Optimal Projection Equations for Model
Reduction and the Relationships Among the Methods of Wilson, Skelton and Moore. IEEE
Transaction on Automatic Control, AC-30, 1201-1211.
Kanno, M. (2005). H2 Model Reduction Using LMIs. 44th IEEE Conference on Decision and
Control, pp. 5887–5892.
Kavranoğlu, D. and Bettayeb, M. (1982). Optimal l∞ Approximation of LTI Systems. American
Control Conference, 30, 2137-2141.
Kavranoğlu, D. and Bettayeb, M. (1993a). Discrete-Time H∞ Model Reduction Problem.
Proceedings of 1993 IFAC World Congress, Sydney, Australia, III, 365-368.

137
Kavranoğlu, D. and Bettayeb, M. (1993b). Characterization of the Solution to the Optimal H∞
Model Reduction Problem. Systems and Control Letters, 20, 99-107.
Kavranoğlu, D. and Bettayeb, M. (1993c). Systems theory Properties and Approximation of
Relaxation Systems. Theme Issue “Control Theory and Its Applications”, Arab J. Science
and Engg., 18(4): 479-491.
Kavranoğlu, D. and Bettayeb, M. (1993d). l∞ Norm Constant Approximation of Unstable
Systems. Proc. 1993 ACC, San Francisco, USA, pp. 2142-2148.
Kavranoğlu, D. and Bettayeb, M. (1994). Characterization and Computation of the Solution to
the Optimal L∞ Approximation Problem. IEEE Transaction on Automatic Control, 39,
1899-1904.
Kavranoğlu, D. and Bettayeb, M. (1995a). Constant L∞ Norm Approximation of Complex
Rational Functions. Numerical Functions Analysis and Optimization: An International
Journal, 16(1,2): 197 - 217.
Kavranoğlu, D. and Bettayeb, M. (1995b). Weighted l∞ Norm Approximation with Given Poles
Using LMI Techniques and Applications. Proceedings of European Control Conference,
Rome, Italy, 1, 567-571.
Kavranoğlu, D. and Bettayeb, M. (1996). LMI Based Computational Schemes for H∞ Model
Reduction. 13th World Congress, IFAC, San Francisco, California, USA.

138
Kavranoğlu, D., Bettayeb, M. and Anjum, M.F. (1995). Rational l∞ Norm Approximation of
Multivariable Systems. Proceedings of the 34th IEEE CDC, New Orleans, Louisiana, USA,
pp. 790-795.
Kavranoğlu, D., Bettayeb, M. and Anjum, M.F. (1996). l∞ Norm Simultaneous Model
Approximation. In Special issue on LMIs in Systems and Control, International J. of Robust
and Nonlinear Control, 6, 999-104.
Kennedy, J. and Eberhart, R. (1995). Particle Swarm Optimization. Proc. IEE International
Conference on Neural Networks, pp. 1942-1947.
Langholz, G. and Feinmesser, D. (1978). Model Reduction by Routh Approximations. Int. J.
Systems Sci., 9(5): 493-496.
Latham, G.A. and Anderson, B.D.O. (1986). Frequency Weighted Optimal Hankel-Norm
Approximation of Stable Transfer Function. System and Control Letters, 5, 229-236.
Li, Y., Chen, K. and Gong, M. (1996). Model Reduction in Control System by Means of Global
Structure Evolution and Local Parameter Learning, Evolutionary Algorithms in Engineering
Applications, Eds. D. Dasgupta and Z. Michalewicz, Springer Verlag.
Li, Y., Qu, Y., Gao, H. and Wang, C. (2005a). Robust l1 Model Reduction for Uncertain
Stochastic Systems with State Delay. American Control Conference, Portland, OR, USA, pp.
2602-2607.

139
Li, Y., Zhou, B., Gao, H. and Wang, C. (2005b). Robust l1 Model Reduction for Time-Delay
Systems. Proceedings of the Fourth International Conference on Machine Learning and
Cybernetics, Guangzhou, 3, 1391-1396.
Liu, C., Zhang, Q.L. and Duan, X. (2007). Short Communication: A remark on ‘Model reduction
for singular systems’. Optimal Control Applications and Methods, 28(4): 301-308.
Liu, Y. and Anderson, B.D.O. (1987). Model Reduction with Time Delay. IEE Proceedings D,
134(6): 349-367.
Lu, H.Y. and Chen, W. (2008). Self-Adaptive Velocity Particle Swarm Optimization for Solving
Constrained Optimization Problems. Journal on Global Optimization, 41, 427-445.
Marmorat, J.P., Olivi, M., Hanzon, B. and Peeters, R.L.M. (2002). Matrix Rational H2
Approximation: A State-Space Approach Using Schur Parameters. Proceedings of the 41st
IEEE Conference on Decision and Control, Las Vegas, Nevada, USA, pp. 4244-4249.
Massachusetts Institute of Technology (2009, March 21). What is Model Order Reduction?
Retrieved March 21, 2009 from the World Wide Web:
http://scripts.mit.edu/~mor/wiki/index.php?title=What_is_Model_order_Reduction.
Maust, R.S. and Feliachi, A. (1998). Reduced Order Modeling Using a Genetic Algorithm. Proc.
of the Thirtieth Southeastern Symposium on System Theory, pp. 67-71.
Mendes, R., Kennedy, J. and Neves, J. (2004). The Fully Informed Particle Swarm: Simpler,
Maybe Better. IEEE Transaction on Evolutionary Computation, 8(3): 204-210.

140
Messaoud, L.A., Mansouri, R. and Haddad, S. (2008). Self-Adaptive Velocity Particle Swarm
Optimization based tunings for fractional proportional integral controllers. MCSEAI, Oran,
Algeria.
Moore, B.C. (1981). Principal Component Analysis in Linear Systems: Controllability,
Observability and Model Reduction. IEEE Transaction on Automatic Control, AC-26, 17-
32.
Obinata, G. and Inooka, H. (1976). A Method of Modeling Linear Time-Invariant Systems by
Linear Systems of Low Order. IEEE Transaction on Automatic Control, AC-21, 602-603.
Obinata, G. and Inooka, H. (1983). Authors’ Reply to “Comments on Model Reduction by
Minimizing the Equation Error”. IEEE Transaction on Automatic Control, AC-28, 124-125.
Pernebo, L. and Silverman, L.M. (1982). Model Reduction via Balanced State Space
Representation. IEEE Transaction on Automatic Control, AC-27(2): 382-387.
Peeters, R.L.M., Hanzon, B. and Jibetean, D. (2003). Optimal H2 Model Reduction in State-
Space: A Case Study. Proceedings of the European Conference, Cambridge, UK.
Pinguet, P.J.M. (1978). State Space Formulation of a Class of Model Reduction Methods. Master
Thesis, University of Cambridge, September 1978.
Sahin, A.Z., Kavranoğlu, D., Bettayeb, M. (1995). Model Reduction in Numerical Heat Transfer
Problems. Applied Mathematics and Computations, 69, 209-225.
Sánchez-Pena, R.S. and Sznaier, M. (1998). Robust Systems: Theory and Applications, John
Wiley & Sons, Inc.

141
Sebakhy, O.A. and Aly, M.N. (1998). Discrete-Time Model Reduction With Optimal Zero
Locations by Norm Minimization. Proceedings of the 1998 IEEE International Conference
on Control Applications, Trieste, Italy, pp. 812-816.
Shi, Y. (2004). Particle Swarm Optimization. IEEE Neural Networks Society, pp. 8-13.
Silverman, L.M. and Bettayeb, M. (1980). Optimal Approximation of Linear Systems. JACC, 2,
p. FA 8-A.
Tan, K.C. and Li, Y. (1996). l∞ Identification and Model Reduction Using a Learning Genetic
Algorithm. Proceedings of UKACC International Conference on Control 96, Exeter, UK,
(Conf. Publ. No. 427), 2, 1125-1130.
Voss, M.S. and Feng, X. (2002). ARMA Model Selection Using Particle Swarm Optimization
and AIC Criteria. The 15th Triennial World Congress, Barcelona, Spain: IFAC.
Wang, J., Liu, W.Q. and Zhang, Q.L. (2004). Model reduction for singular systems via
covariance approximation. Optimal Control Applications and Methods, 25, 263-278.
Wilson, D.A. (1970). Optimal Solution of Model Reduction Problem. Proc. IEE, 117(6): 1161-
1165.
Wilson, D.A. (1974). Model Reduction for Multivariable Systems. International Journal on
Control, 20, 57-64.
Wu, F. and Jaramillo, J.J. (2003). Computationally Efficient Algorithm for Frequency-Weighted
Optimal H∞ Model Reduction. Asian Journal of Control, 5(3): 341-349.

142
Xu, D.B., Zhang, Y. and Zhang, Q.L. (2006). Short Communication: A remark on ‘Model
reduction for singular systems via covariance approximation’. Optimal Control Applications
and Methods, 27(5): 293-298.
Xu, H., Zou, Y., Xu, S., Lam, J. and Wang, Q. (2005). H∞ Model Reduction of 2-D Singular
Roesser Models. Multidimensional Systems and Signal Processing, 16(3): 285-304.
Yan, W.Y. and Lam, J. (1999a). An Approximate Approach to H2 Optimal Model Reduction.
IEEE Transaction on Automatic Control, 44(7): 1341-1357.
Yan, W.Y. and Lam, J. (1999b). Further Results on H2 Optimal Model Reduction. Proceedings
of the 14th IFAC.
Yang, Z.J., Hachino, T. and Tsuji, T. (1996). Model Reduction with Time Delay Combining the
Least-Squares Method with the Genetic Algorithm. IEE Proceedings on Control Theory and
Applications, 143(3): 247-254.
Zhang, L., Shi, P., Boukas, E.K. and Wang, C. (2008). H∞ model reduction for uncertain
switched linear discrete-time systems. Technical Communique, Elsevier Ltd..
Zhang, L., Boukas, E.K. and Shi, P. (2009). H∞ model reduction for discrete-time Markov jump
linear systems with partially known transition probabilities. International Journal of
Control, 82(2): 343-351.
Zhao, G. and Sinha, N.K., (1983). Model selection in Aggregated Models. Large Scale Systems,
pp. 209-216.

143
Zhou, K. (1995). Frequency-Weighted l∞ Norm and Optimal Hankel norm Model Reduction.
IEEE Transaction on Automatic Control, 40(10): 1687-1699.

List of Accepted/Submitted Papers from Thesis Work
[1] R. Salim and M. Bettayeb, “H∞ Optimal Model Reduction Using Genetic Algorithms”,
Sixth UAE MATHDAY, April 26, 2008, The Petroleum Institute, Abu Dhabi, UAE
(Abstract)
[2] R. Salim and M. Bettayeb, “H2 and H∞ Optimal Model Reduction Using Genetic
Algorithms”, Proceedings of the 3rd International Conference on Modeling, Simulation, and
Applied Optimization (ICMSAO'09), January 20 – 22, 2009, AUS, Sharjah, UAE.
[3] R. Salim and M. Bettayeb, “H2 Optimal Model Reduction Using Genetic Algorithms and
Particle Swarm Optimization”, Proceeding of the 6th IEEE International Symposium on
Mechatronics and its Applications (ISMA09), March 23 – 26, 2009, AUS, Sharjah, UAE.
Also selected for Journal Publication.
[4] R. Salim and M. Bettayeb, “L1 Optimal Model Reduction Using Genetic Algorithms”,
Seventh UAE MATHDAY, April 25, 2009, UoS, Sharjah, UAE (Abstract).

145
[5] R. Salim and M. Bettayeb, “L1 Optimal Model Reduction Using Genetic Algorithms and
Particle Swarm Optimization: A Comparison”, Submitted to the 2nd IFAC International
Conference on Intelligent Control Systems and Signal Processing (ICONS 2009),
September 21-23, 2009, Istanbul, Turkey.
[6] M. Bettayeb and R. Salim, “H∞ Optimal Model Reduction of Complex Systems Using
Particle Swarm Optimization”, Submitted to the 3rd International Conference on Complex
Systems and Applications, June 29 - July 02, 2009, University of Le Havre, Normandy,
France.
[7] R. Salim and M. Bettayeb, “H2 Optimal Model Reduction of Dynamic Systems with Time-
Delay Using Particle Swarm Optimization”, Submitted to the 3rd International Conference
on Complex Systems and Applications, June 29 - July 02, 2009, University of Le Havre,
Normandy, France.
[8] M. Bettayeb and R. Salim, “GA Based H∞ Optimal Model Reduction: Application to
Power System”, Submitted to the IEEE International Conference on Electric Power and
Energy Convergent Systems, (EPECS’09), November 10-12, 2009, AUS, UAE.
[9] M. Bettayeb and R. Salim, “Hybrid Norm Model Reduction Using Evolutionary
Optimization Algorithms”, Submitted to the 4th International Symposium on Intelligent
Computation and Applications (ISICA’09), October 23-25, 2009, Huangshi, China.
[10] R. Salim and M. Bettayeb, “Performance of GA for the H2, H∞ and L1 Optimal Model
Reduction Problem”, Submitted to the International Journal of Applied Metaheuristic
Computing, April 2009.

146
[11] M. Bettayeb and R. Salim, “Performance of PSO for the H2, H∞ and L1 Optimal Model
Reduction Problem”, Submitted to AutoSoft – Intelligent Automation and Soft Computing
Journal, April 2009.
[12] R. Salim and M. Bettayeb, “H2 and H∞ Optimal Model Reduction Using Genetic
Algorithms”, Submitted to the Special Issue of the Journal of the Franklin Institute, April
2009.

Appendices
MATLAB Codes

Appendix 1
Thesis MATLAB Code
File Name: thesis.m 1- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 2- %% Reem Salim %% 3- %% ID#: 20542511 %% 4- %% M. Sc. Thesis %% 5- %% "Optimal Model Reduction Using GA and PSO" %% 6- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 7- 8- clc 9- clear all 10- close all 11- 12- fprintf('________________________________________________________________
___\n') 13- fprintf('\n\t\t\t\t\t\t\tM. Sc. Thesis on\n') 14- fprintf('\t\t\t\t"Optimal Model Reduction Using GA and PSO"\n') 15- fprintf('\t\t\t\t\t\t\t By Reem Salim \n') 16- fprintf('\t\t\t\t\tSupervised by: Prof. Maamar Bettayeb\n') 17- fprintf('________________________________________________________________
___\n') 18- 19- X = 1; 20- while X == 1 21- 22- global Count 23- global Red_N 24- global Orig_Sys
iii
25- global TFsys 26- global T 27- global cof_a 28- global cof_b 29- global cof_c 30- global swarm_size 31- global Iter 32- global c1 33- global c2 34- global w1 35- global w2 36- global we 37- global tol 38- 39- 40- fprintf('\n\nWhat is the order of your original SISO system?\n') 41- Orig_N = input(' Original order: '); 42- fprintf('\nInto which order do you want to reduce your system?\n') 43- Red_N = input(' Reduced order: '); 44- 45- 46- fprintf('\n\nWhat is the form of your original system? (type 1 or 2)\n') 47- fprintf('\t1. State Space Model.\n') 48- fprintf('\t2. Transfer Function.\n') 49- A = input('Answer: '); 50- 51- if A == 1 52- fprintf('\n\nPlease input the state space model matrices of your
system:\n') 53- Orig_A = input(' A = '); 54- Orig_B = input(' B = '); 55- Orig_C = input(' C = '); 56- Orig_D = input(' D = '); 57- Orig_Sys = ss(Orig_A, Orig_B, Orig_C, Orig_D); 58- [Orig_Num,Orig_Den] = ss2tf(Orig_A, Orig_B, Orig_C, Orig_D); 59- else 60- fprintf('\n\nPlease input the Numerator and Denominator Polynomials
of your transfer function:\n') 61- Orig_Num = input(' Numerator Polynomial: '); 62- Orig_Den = input(' Denominator Polynomial: '); 63- [Orig_A, Orig_B, Orig_C, Orig_D] = tf2ss(Orig_Num,Orig_Den); 64- Orig_Sys = ss(Orig_A, Orig_B, Orig_C, Orig_D); 65- end 66- 67- fprintf('\n\nWhich algorithm would you like to use to perform the
reduction? (type 1 or 2)\n') 68- fprintf('\t1. Genetic Algorithm (GA).\n') 69- fprintf('\t2. Particle Swarm Optimization (PSO).\n') 70- B = input('Answer: '); 71- 72- fprintf('\n\nWhich of the following Model Reduction Problems would you
like to use? (type 1, 2, 3, 4 or 5)\n') 73- fprintf('\t1. The L1 Norm.\n') 74- fprintf('\t2. The H2 Norm.\n')

iv
75- fprintf('\t3. The H-infinity Norm.\n') 76- fprintf('\t4. A Hybrid Criteria.\n') 77- fprintf('\t5. The H2 Norm with Time Delay (for PSO).\n') 78- C = input('Answer: '); 79- 80- if C == 4 81- fprintf('\n\nThe Hybrid Fitness Function will be of the form: \n') 82- fprintf('\t\t\tFitness = a L1_Norm + b H2_Norm + c Hinf_Norm\n\n') 83- fprintf('Please input the desired values for the three
coefficients:\n') 84- cof_a = input(' a = '); 85- cof_b = input(' b = '); 86- cof_c = input(' c = '); 87- end 88- 89- Count = 0; %% Iterations Counter 90- 91- %%%%%%%%%%%%%%%%%%%%%%%%%%%% 92- %%% Genetic Algorithm %%% 93- %%%%%%%%%%%%%%%%%%%%%%%%%%%% 94- if B == 1 95- fprintf('\n\nPlease input the coefficients of your GA:\n') 96- Nind = input(' The Population size = '); 97- cross = input(' Fraction of individuals to undergo Crossover = '); 98- migr = input(' Fraction of best scoring individuals to migrate =
'); 99- surv = input(' Number of best individuals to survive to next
generation = '); 100- tol = input(' Maximum tolerable error or norm = '); 101- Gener = input(' Maximum Number of Generations = '); 102- Nvar = Red_N^2 + 2* Red_N; 103- 104- % Impulse Response of Original System 105- [Y,T,X] = impulse(Orig_Sys); 106- 107- % Transfer Function of Original System G(s) 108- [N1,D1] = ss2tf(Orig_A,Orig_B,Orig_C,Orig_D); 109- Gs = tf(N1,D1); 110- 111- % Genetic Algorithm 112- Options = gaoptimset('PopulationSize',Nind,'EliteCount', surv,... 113- 'CrossoverFraction',cross,'MigrationFraction',migr,... 114- 'Generations',Gener,'SelectionFcn',@selectionroulette,... 115- 'FitnessLimit',0,'TimeLimit',inf,'StallTimeLimit',inf,... 116- 'StallGenLimit',1500,'CrossoverFcn',@crossoverscattered); 117- 118- % Fitness Functions 119- if C == 1 % The L1 Norm. 120- [x,FVAL,REASON,OUTPUT,POPULATION,SCORES]=ga(@fitL1,Nvar,Options); 121- 122- elseif C == 2 % The H2 Norm. 123- [x,FVAL,REASON,OUTPUT,POPULATION,SCORES]=ga(@fitH2,Nvar,Options); 124- 125- elseif C == 3 % The H-infinity Norm. 126- [x,FVAL,REASON,OUTPUT,POPULATION,SCORES]=ga(@fitHinf,Nvar,Options);

v
127- 128- else % The Hybrid Norm. 129- [x,FVAL,REASON,OUTPUT,POPULATION,SCORES]=ga(@fitHybrid,Nvar,Options); 130- 131- end 132- 133- % The number of Iterations 134- fprintf('\n\nThe Number of Iterations:\t%.0f\n',Count/Nind - 1) 135- 136- % The State Space and Transfer Function Representations of the
Reduced Model. 137- [FVAL,I] = min(SCORES); 138- Win_ind = POPULATION(I,:); 139- 140- Red_A = reshape(Win_ind(1:(Red_N)^2),Red_N,Red_N); 141- Red_B = reshape(Win_ind((Red_N)^2+1:(Red_N)^2+Red_N),Red_N,1); 142- Red_C = Win_ind((Red_N)^2+Red_N+1:(Red_N)^2+2*Red_N); 143- Red_D = 0; 144- fprintf('\n\nThe State Space Representation of the resulting Reduced
Model:\n') 145- Red_Sys = ss(Red_A, Red_B, Red_C,Red_D) 146- 147- fprintf('\n\nThe Transfer Function of the resulting Reduced
Model:\n') 148- [N2,D2] = ss2tf(Red_A,Red_B,Red_C,Red_D); 149- Gr = tf(N2,D2) 150- [H1,F1] = freqz(N1,D1); 151- [H2,F2] = freqz(N2,D2); 152- 153- % Calculating steady state values and steady state error. 154- [OSS, tss] = step(Orig_Sys,[0 100]); 155- [RSS, tss] = step(Red_Sys,[0 100]); 156- fprintf('\n\nThe Steady State value of the Original Model:
%.7f\n',OSS(2)) 157- fprintf('The Steady State value of the Reduced Model:
%.7f\n',RSS(2)) 158- fprintf('The Steady State Error is: %.7f\n',abs(OSS(2)-RSS(2))) 159- 160- % Calculating the three Norms for the resulting reduced model. 161- L1_Norm = trapz(T,abs(impulse(Orig_Sys)- impulse(Red_Sys,T))); 162- E = Orig_Sys - Red_Sys; 163- H2_Norm = norm(E); 164- Hinf_Norm = norm(E,inf); 165- fprintf('\n\nThe L1-Norm of the Reduced Model: %.7f\n',L1_Norm) 166- fprintf('The H2-Norm of the Reduced Model: %.7f\n',H2_Norm) 167- fprintf('The Hinf-Norm of the Reduced Model: %.7f\n\n',Hinf_Norm) 168- 169- % Plotting the impulse, step and frequency responses of the 170- % original and reduced models. 171- figure(1) 172- impulse(Orig_Sys,'b',Red_Sys,'r') 173- legend('Original Model', 'Reduced Model') 174- figure(2) 175- step(Orig_Sys,'b',Red_Sys,'r')

vi
176- legend('Original Model', 'Reduced Model') 177- figure(3) 178- bode(Orig_Sys,'b',Red_Sys,'r') 179- legend('Original Model', 'Reduced Model') 180- 181- end 182- 183- 184- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 185- %%% Particle Swarm Optimization %%% 186- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 187- 188- if B == 2 189- fprintf('\n\nPlease input the coefficients of your PSO:\n') 190- swarm_size = input(' Swarm Size = '); 191- mv = input(' Maximum Velocity of a Particle = '); 192- c1 = input(' Acceleration Constant c1 = '); 193- c2 = input(' Acceleration Constant c2 = '); 194- w1 = input(' Initial inertia weight = '); 195- w2 = input(' Final inertia weight = '); 196- we = input(' Epoch when inertial weight at final value = '); 197- tol = input(' Maximum tolerable error or norm = '); 198- Iter = input(' Maximum Number of Iterations = '); 199- Nvar = Red_N^2 + 2* Red_N; 200- if C == 5 201- TFsys = tf(Orig_Num,Orig_Den); 202- Nvar = 2*Red_N+1; 203- end 204- 205- % Impulse Response of Original System 206- [Y,T,X] = impulse(Orig_Sys); 207- if C == 5 208- [Y,T,X] = impulse(TFsys); 209- end 210- 211- % Transfer Function of Original System G(s) 212- [N1,D1] = ss2tf(Orig_A,Orig_B,Orig_C,Orig_D); 213- Gs = tf(N1,D1); 214- 215- % Particle Swarm Optimization 216- 217- % Fitness Functions 218- if C == 1 % The L1 Norm. 219- [Win_ind,tr,te]= pso_Trelea_vectorized('fitL1pso',Nvar,mv); 220- 221- elseif C == 2 % The H2 Norm. 222- [Win_ind,tr,te]= pso_Trelea_vectorized('fitH2pso',Nvar,mv); 223- 224- elseif C == 3 % The H-infinity Norm. 225- [Win_ind,tr,te]= pso_Trelea_vectorized('fitHinfpso',Nvar,mv); 226- 227- elseif C == 4 % The Hybrid Norm. 228- [Win_ind,tr,te]= pso_Trelea_vectorized('fitHybridpso',Nvar,mv); 229-

vii
230- elseif C == 5 % H2 Norm With Time Delay 231- [Win_ind,tr,te]= pso_Trelea_vectorized('fitH2TD',Nvar,mv); 232- 233- end 234- 235- % The number of Iterations 236- fprintf('\n\nThe Number of Iterations:\t%.0f\n',Count-1) 237- 238- % The State Space and Transfer Function Representations of the
Reduced Model. 239- if C ~= 5 240- Win_ind = Win_ind(1:Nvar)'; 241- Red_A = reshape(Win_ind(1:(Red_N)^2),Red_N,Red_N); 242- Red_B = reshape(Win_ind((Red_N)^2+1:(Red_N)^2+Red_N),Red_N,1); 243- Red_C = Win_ind((Red_N)^2+Red_N+1:(Red_N)^2+2*Red_N); 244- Red_D = 0; 245- fprintf('\n\nThe State Space Representation of the resulting
Reduced Model:\n') 246- Red_Sys = ss(Red_A,Red_B,Red_C,Red_D) 247- fprintf('\n\nThe Transfer Function of the resulting Reduced
Model:\n') 248- [N2,D2] = ss2tf(Red_A,Red_B,Red_C,Red_D); 249- Gr = tf(N2,D2) 250- [H2,F2] = freqz(N2,D2); 251- [H1,F1] = freqz(N1,D1); 252- 253- % Calculating steady state values and steady state error. 254- [OSS, tss] = step(Orig_Sys,[0 1000]); 255- [RSS, tss] = step(Red_Sys,[0 1000]); 256- fprintf('\n\nThe Steady State value of the Original Model:
%.9f\n',OSS(2)) 257- fprintf('The Steady State value of the Reduced Model:
%.9f\n',RSS(2)) 258- fprintf('The Steady State Error is: %.9f\n',abs(OSS(2)-RSS(2))) 259- 260- % Calculating the three Norms for the resulting reduced model. 261- L1_Norm = trapz(T,abs(impulse(Orig_Sys)- impulse(Red_Sys,T))); 262- E = Orig_Sys - Red_Sys; 263- H2_Norm = norm(E); 264- Hinf_Norm = norm(E,inf); 265- fprintf('\n\nThe L1-Norm of the Reduced Model: %.9f\n',L1_Norm) 266- fprintf('The H2-Norm of the Reduced Model: %.9f\n',H2_Norm) 267- fprintf('The Hinf-Norm of the Reduced Model: %.9f\n\n',Hinf_Norm) 268- else 269- Win_ind = Win_ind(1:Nvar)'; 270- Red_Num = Win_ind(1:Red_N); 271- Red_Den = [1, Win_ind(Red_N+1:2*Red_N)]; 272- Red_Sys = tf(Red_Num,Red_Den); 273- Red_Sys.OutputDelay = abs(Win_ind(Red_N*2+1)); 274- fprintf('\n\nThe Transfer Function of the resulting Reduced
Model:\n') 275- Red_Sys 276- Orig_Sys = TFsys; 277- H2_Norm = sqrt(trapz(T,(abs(impulse(Orig_Sys)-
impulse(Red_Sys,T))).^2));

viii
278- fprintf('The H2-Norm of the Reduced Model: %.9f\n',H2_Norm) 279- [H2,F2] = freqz(Red_Num,Red_Den); 280- [H1,F1] = freqz(Orig_Num,Orig_Den); 281- end 282- 283- % Plotting the impulse, step and frequency responses of the original 284- % and reduced models. 285- figure(1) 286- impulse(Orig_Sys,'b',Red_Sys,'r') 287- legend('Original Model','Reduced Model') 288- figure(2) 289- step(Orig_Sys,'b',Red_Sys,'r') 290- legend('Original Model','Reduced Model') 291- figure(3) 292- bode(Orig_Sys,'b',Red_Sys,'r') 293- legend('Original Model', 'Reduced Model') 294- 295- end 296- 297- %%%%%%%%%%%%%%%%%%%%% 298- %%% End of Code %%% 299- %%%%%%%%%%%%%%%%%%%%% 300- 301- fprintf('\n\nDo you want to reduce another model? (type 1 or 2)\n') 302- fprintf('\t1. Yes I do.\n') 303- fprintf('\t2. No I dont. Exit program.\n') 304- X = input('Answer: '); 305- end 306- 307- fprintf('\n\nThank you for using our model reduction program.\n') 308- fprintf('For your comments and suggestions: [email protected]\n') 309- fprintf('All rights reserved (R).\n\n')

Appendix 2
GA Functions
2.1 H2 Norm Function
File Name: fitH2.m
1- function fitness = fitH2(Pop) 2- 3- global Count 4- global Red_N 5- global Orig_Sys 6- 7- Red_A = reshape(Pop(1:(Red_N)^2),Red_N,Red_N); 8- Red_B = reshape(Pop((Red_N)^2+1:(Red_N)^2+Red_N),Red_N,1); 9- Red_C = Pop((Red_N)^2+Red_N+1:(Red_N)^2+2*Red_N); 10- Red_D = 0; 11- 12- Red_Sys = ss(Red_A, Red_B, Red_C,Red_D); 13- E = parallel(Orig_Sys,-Red_Sys); 14- 15- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 16- Eigenvalues = eig(Red_A); 17- Real = real(Eigenvalues); 18- x = 0; 19- for i = 1:length(Real) 20- if sign(Real(i)) == 1 21- x = x+1; 22- end 23- end 24- if x ~= 0 25- x = inf; 26- end

x
27- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 28- 29- fitness = norm(E) + x; 30- Count = Count + 1;
2.2 H∞ Norm Function
File Name: fitHinf.m
1- function fitness = fitHinf(Pop) 2- 3- global Red_N 4- global Orig_Sys 5- global Count 6- 7- Red_A = reshape(Pop(1:(Red_N)^2),Red_N,Red_N); 8- Red_B = reshape(Pop((Red_N)^2+1:(Red_N)^2+Red_N),Red_N,1); 9- Red_C = Pop((Red_N)^2+Red_N+1:(Red_N)^2+2*Red_N); 10- Red_D = 0; 11- 12- Red_Sys = ss(Red_A, Red_B, Red_C,Red_D); 13- E = parallel(Orig_Sys,-Red_Sys); 14- 15- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 16- Eigenvalues = eig(Red_A); 17- Real = real(Eigenvalues); 18- x = 0; 19- for i = 1:length(Real) 20- if sign(Real(i)) == 1 21- x = x+1; 22- end 23- end 24- if x ~= 0 25- x = inf; 26- end 27- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 28- 29- fitness = norm(E,inf) + x; 30- Count = Count + 1;
2.3 L1 Norm Function
File Name: fitL1.m 1- function fitness = fitL1(Pop) 2-

xi
3- global Count 4- global Red_N 5- global Orig_Sys 6- global T 7- 8- Red_A = reshape(Pop(1:(Red_N)^2),Red_N,Red_N); 9- Red_B = reshape(Pop((Red_N)^2+1:(Red_N)^2+Red_N),Red_N,1); 10- Red_C = Pop((Red_N)^2+Red_N+1:(Red_N)^2+2*Red_N); 11- Red_D = 0; 12- 13- Red_Sys = ss(Red_A, Red_B, Red_C,Red_D); 14- 15- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 16- Eigenvalues = eig(Red_A); 17- Real = real(Eigenvalues); 18- x = 0; 19- for i = 1:length(Real) 20- if sign(Real(i)) == 1 21- x = x+1; 22- end 23- end 24- if x ~= 0 25- x = inf; 26- end 27- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 28- 29- fitness = trapz(T,abs(impulse(Orig_Sys)- impulse(Red_Sys,T)))+ x; 30- Count = Count + 1;
2.4 HHybrid Norm Function
File Name: fitHybrid.m 1- function fitness = fitHybrid(Pop) 2- 3- global Red_N 4- global Orig_Sys 5- global Count 6- global cof_a 7- global cof_b 8- global cof_c 9- global T 10- 11- Red_A = reshape(Pop(1:(Red_N)^2),Red_N,Red_N); 12- Red_B = reshape(Pop((Red_N)^2+1:(Red_N)^2+Red_N),Red_N,1); 13- Red_C = Pop((Red_N)^2+Red_N+1:(Red_N)^2+2*Red_N); 14- Red_D = 0; 15- 16- Red_Sys = ss(Red_A, Red_B, Red_C,Red_D); 17- E = parallel(Orig_Sys,-Red_Sys);

xii
18- 19- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 20- Eigenvalues = eig(Red_A); 21- Real = real(Eigenvalues); 22- x = 0; 23- for i = 1:length(Real) 24- if sign(Real(i)) == 1 25- x = x+1; 26- end 27- end 28- if x ~= 0 29- x = inf; 30- end 31- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 32- 33- L1norm = trapz(T,abs(impulse(Orig_Sys)- impulse(Red_Sys,T))); 34- 35- fitness = cof_a*L1norm + cof_b*norm(E) + cof_c*norm(E,inf)+ x; 36- Count = Count + 1;

Appendix 3
PSO Functions
3.1 H2 Norm Function
File Name: fitH2pso.m 1- function out = fitH2pso(Pop) 2- 3- global Count 4- global Red_N 5- global Orig_Sys 6- global swarm_size 7- 8- for j = 1:swarm_size 9- Pop = in(j,:); 10- Red_A = reshape(Pop(1:(Red_N)^2),Red_N,Red_N); 11- Red_B = reshape(Pop((Red_N)^2+1:(Red_N)^2+Red_N),Red_N,1); 12- Red_C = Pop((Red_N)^2+Red_N+1:(Red_N)^2+2*Red_N); 13- Red_D = 0; 14- 15- Red_Sys = ss(Red_A, Red_B, Red_C,Red_D); 16- E = parallel(Orig_Sys,-Red_Sys); 17- 18- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 19- Eigenvalues = eig(Red_A); 20- Real = real(Eigenvalues); 21- x = 0; 22- for i = 1:length(Real) 23- if sign(Real(i)) == 1 24- x = x+1; 25- end 26- end 27- if x ~= 0

xiv
28- x = inf; 29- end 30- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 31- 32- out(j,1) = norm(E) + x; 33- end 34- Count = Count + 1; 35- return 3.2 H∞ Norm Function
File Name: fitHinfpso.m 1- function out = fitHinfpso(Pop) 2- 3- global Red_N 4- global Orig_Sys 5- global Count 6- global swarm_size 7- 8- for j = 1:swarm_size 9- Pop = in(j,:); 10- Red_A = reshape(Pop(1:(Red_N)^2),Red_N,Red_N); 11- Red_B = reshape(Pop((Red_N)^2+1:(Red_N)^2+Red_N),Red_N,1); 12- Red_C = Pop((Red_N)^2+Red_N+1:(Red_N)^2+2*Red_N); 13- Red_D = 0; 14- 15- Red_Sys = ss(Red_A, Red_B, Red_C,Red_D); 16- E = parallel(Orig_Sys,-Red_Sys); 17- 18- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 19- Eigenvalues = eig(Red_A); 20- Real = real(Eigenvalues); 21- x = 0; 22- for i = 1:length(Real) 23- if sign(Real(i)) == 1 24- x = x+1; 25- end 26- end 27- if x ~= 0 28- x = inf; 29- end 30- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 31- 32- out(j,1) = norm(E,inf) + x; 33- end 34- Count = Count + 1; 35- return
xv
3.3 L1 Norm Function
File Name: fitL1pso.m 1- function fitness = fitL1pso(Pop) 2- 3- global Count 4- global Red_N 5- global Orig_Sys 6- global T 7- global swarm_size 8- 9- for j = 1:swarm_size 10- Pop = in(j,:); 11- Red_A = reshape(Pop(1:(Red_N)^2),Red_N,Red_N); 12- Red_B = reshape(Pop((Red_N)^2+1:(Red_N)^2+Red_N),Red_N,1); 13- Red_C = Pop((Red_N)^2+Red_N+1:(Red_N)^2+2*Red_N); 14- Red_D = 0; 15- 16- Red_Sys = ss(Red_A, Red_B, Red_C,Red_D); 17- E = parallel(Orig_Sys,-Red_Sys); 18- 19- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 20- Eigenvalues = eig(Red_A); 21- Real = real(Eigenvalues); 22- x = 0; 23- for i = 1:length(Real) 24- if sign(Real(i)) == 1 25- x = x+1; 26- end 27- end 28- if x ~= 0 29- x = inf; 30- end 31- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 32- 33- fitness(j,1)=trapz(T,abs(impulse(Orig_Sys)- impulse(Red_Sys,T)))+x; 34- end 35- Count = Count + 1; 36- return 3.4 HHybrid Norm Function
File Name: fitHybridpso.m 1- function fitness = fitL1pso(Pop) 2- 3- global Red_N 4- global Orig_Sys 5- global Count

xvi
6- global cof_a 7- global cof_b 8- global cof_c 9- global T 10- global swarm_size 11- 12- for j = 1:swarm_size 13- Pop = in(j,:); 14- Red_A = reshape(Pop(1:(Red_N)^2),Red_N,Red_N); 15- Red_B = reshape(Pop((Red_N)^2+1:(Red_N)^2+Red_N),Red_N,1); 16- Red_C = Pop((Red_N)^2+Red_N+1:(Red_N)^2+2*Red_N); 17- Red_D = 0; 18- 19- Red_Sys = ss(Red_A, Red_B, Red_C,Red_D); 20- E = parallel(Orig_Sys,-Red_Sys); 21- 22- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 23- Eigenvalues = eig(Red_A); 24- Real = real(Eigenvalues); 25- x = 0; 26- for i = 1:length(Real) 27- if sign(Real(i)) == 1 28- x = x+1; 29- end 30- end 31- if x ~= 0 32- x = inf; 33- end 34- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 35- 36- L1norm = trapz(T,abs(impulse(Orig_Sys)- impulse(Red_Sys,T))); 37- 38- out(j,1)=cof_a*L1norm + cof_b*norm(E) + cof_c*norm(E,inf)+ x; 39- end 40- Count = Count + 1; 41- return
3.5 H2 Norm with Time Delay Function
File Name: fitH2TD.m 1- function out = fitH2TD(Pop) 2- 3- global Count 4- global Red_N 5- global TFsys 6- global T 7- global swarm_size 8- 9- for j = 1:swarm_size

xvii
10- Pop = in(j,:); 11- Red_Num = Pop(1:Red_N); 12- Red_Den = [1, Pop(Red_N+1:2*Red_N)]; 13- Red_Sys = tf(Red_Num,Red_Den); 14- Red_Sys.OutputDelay = abs(Pop(Red_N*2+1)); 15- 16- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 17- [A,B,C,D] = tf2ss(Red_Num,Red_Den); 18- Eigenvalues = eig(A); 19- Real = real(Eigenvalues); 20- x = 0; 21- for i = 1:length(Real) 22- if sign(Real(i)) == 1 23- x = x+1; 24- end 25- end 26- if x ~= 0 27- x = inf; 28- end 29- %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 30- 31- out(j,1)= sqrt(trapz(T,(abs(impulse(TFsys)-impulse(Red_Sys,T))).^2))+x; 32- end 33- Count = Count + 1; 34- return
Copyright © 2022 FDOKUMEN