NOVEL FUZZY NARX IMC CONTROL OF MISO DYNAMIC SYSTEM USING PARTICLE SWARM OPTIMIZATION
11
International Journal of Robotics and Automation, Vol. 29, No. 2, 2014 NOVEL FUZZY NARX IMC CONTROL OF MISO DYNAMIC SYSTEM USING PARTICLE SWARM OPTIMIZATION Ho P.H. Anh ∗ Abstract The paper investigates the fuzzy non-linear auto-regressive with eXogenous input (NARX) model used to model the dynamic pneu- matic artificial muscle (PAM) manipulator. The NARX fuzzy model is then introduced in the proposed fuzzy-based internal model controller (IMC) control scheme, to effectively track the two-axis PAM manipulator rotation. Parameters of the fuzzy NARX models are optimized using particle swarm optimization. Good perfor- mance of the novel control method combined the robustness of IMC control and the prediction capability of the proposed fuzzy scheme. Efficiency of the novel control method is proven by ex- periments for two different payloads as well as two typical control schemes. Key Words 1. Introduction Until now, the pneumatic artificial muscle (PAM) manip- ulator is viewed to install in a PAM-based rehabilitating device [1]. Unfortunately, the air pressure variation of the PAM robot arm causes dynamic noise from the pres- sure response. Hence, it appears difficult to operate a PAM-based rehabilitation robot at high speed to perform human-friendly tasks. Some advanced modelling and con- trol strategies have been researched which aim at solving the limitations of the PAM manipulator [2]–[9]. Although these methods provide smooth motion to referential input signals, the disadvantage appears to be that the manip- ulators must be in slow motion so as to obtain robust and precise operation. Another disadvantage is that the payload should be considered to be unchanged or at most ∗ HCM City University of Technology, VNU-HCM, Ho Chi Minh City, Vietnam; e-mail: [email protected] Recommended by Prof. M.S. Kamel (DOI: 10.2316/Journal.206.2014.2.206-3727) changing by only a small amount. Therefore, it is desirable to develop other novel controllers which can effectively control a dynamic plant with variable payload [10]–[18]. IMC control is part of the robustness method familiar in manipulator control applications. The advantages of IMC include simple implementation, good disturbance re- jection and insensitivity to parameter variation [19]. The IMC is efficiently applied not only to linear systems but also to non-linear ones [20]. Recently, the IMCcontrol combined with intelligence controllers has developed in- creasingly, for example, IMC-fuzzy scheme in [21], adaptive IMC-fuzzy controller in [22], [18], IMC-neural model [23] and adaptive IMC-neural scheme [24]. Problem relates to the fact that it is hard to identify precisely both of direct and inverse schemes of the manipulator which is needed to be applied in the IMCcontrol diagram. This fact makes the IMC control not to be applied in manipulator position control. To correct these disadvantages, a novel method for the modelling of the dynamic PAM-based manipulator is in- vestigated in this paper. The new identification procedure successfully identifies direct and inverse proposed fuzzy schemes. Then, particle swarm optimization (PSO) tool is applied to optimally select the best parameters of new non-linear auto-regressive with eXogenous input (NARX) fuzzy model. In addition, the new fuzzy-based IMC is im- plemented to overcome external disturbances. Due to the offline learning ability, the proposed control method can learn the PAM manipulator dynamic features in advance and then efficiently decide online control decisions. As a result, the novel fuzzy-based IMC proves the capability to outperform conventional PID controller. The remainder of this paper is organized as follows: Section 2 presents the experimental configuration of the PAM manipulator system. Section 3 presents the PSO algorithm. In Section 4 a procedure for modelling of the direct and inverse adaptive fuzzy models using PSO is discussed. Section 5 presents the new fuzzy-based IMC control scheme. Sections 6 and 7 present experimental results and the analysis of the proposed controller applied to the PAM manipulator. Finally, Section 8 presents conclusions of the study. 133 NARX fuzzy scheme, internal model controller, pneumatic artificial mus- cle manipulator, identified process, fuzzy-based internal model controller, particle swarm optimization
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of NOVEL FUZZY NARX IMC CONTROL OF MISO DYNAMIC SYSTEM USING PARTICLE SWARM OPTIMIZATION

International Journal of Robotics and Automation, Vol. 29, No. 2, 2014
NOVEL FUZZY NARX IMC CONTROL
OF MISO DYNAMIC SYSTEM USING
PARTICLE SWARM OPTIMIZATION
Ho P.H. Anh∗
Abstract
The paper investigates the fuzzy non-linear auto-regressive with
eXogenous input (NARX) model used to model the dynamic pneu-
matic artificial muscle (PAM) manipulator. The NARX fuzzy
model is then introduced in the proposed fuzzy-based internal model
controller (IMC) control scheme, to effectively track the two-axis
PAM manipulator rotation. Parameters of the fuzzy NARX models
are optimized using particle swarm optimization. Good perfor-
mance of the novel control method combined the robustness of
IMC control and the prediction capability of the proposed fuzzy
scheme. Efficiency of the novel control method is proven by ex-
periments for two different payloads as well as two typical control
schemes.
Key Words
1. Introduction
Until now, the pneumatic artificial muscle (PAM) manip-ulator is viewed to install in a PAM-based rehabilitatingdevice [1]. Unfortunately, the air pressure variation ofthe PAM robot arm causes dynamic noise from the pres-sure response. Hence, it appears difficult to operate aPAM-based rehabilitation robot at high speed to performhuman-friendly tasks. Some advanced modelling and con-trol strategies have been researched which aim at solvingthe limitations of the PAM manipulator [2]–[9]. Althoughthese methods provide smooth motion to referential inputsignals, the disadvantage appears to be that the manip-ulators must be in slow motion so as to obtain robustand precise operation. Another disadvantage is that thepayload should be considered to be unchanged or at most
∗ HCM City University of Technology, VNU-HCM, Ho Chi MinhCity, Vietnam; e-mail: [email protected]
Recommended by Prof. M.S. Kamel(DOI: 10.2316/Journal.206.2014.2.206-3727)
changing by only a small amount. Therefore, it is desirableto develop other novel controllers which can effectivelycontrol a dynamic plant with variable payload [10]–[18].
IMC control is part of the robustness method familiarin manipulator control applications. The advantages ofIMC include simple implementation, good disturbance re-jection and insensitivity to parameter variation [19]. TheIMC is efficiently applied not only to linear systems butalso to non-linear ones [20]. Recently, the IMCcontrolcombined with intelligence controllers has developed in-creasingly, for example, IMC-fuzzy scheme in [21], adaptiveIMC-fuzzy controller in [22], [18], IMC-neural model [23]and adaptive IMC-neural scheme [24]. Problem relates tothe fact that it is hard to identify precisely both of directand inverse schemes of the manipulator which is needed tobe applied in the IMCcontrol diagram. This fact makesthe IMC control not to be applied in manipulator positioncontrol.
To correct these disadvantages, a novel method for themodelling of the dynamic PAM-based manipulator is in-vestigated in this paper. The new identification proceduresuccessfully identifies direct and inverse proposed fuzzyschemes. Then, particle swarm optimization (PSO) toolis applied to optimally select the best parameters of newnon-linear auto-regressive with eXogenous input (NARX)fuzzy model. In addition, the new fuzzy-based IMC is im-plemented to overcome external disturbances. Due to theoffline learning ability, the proposed control method canlearn the PAM manipulator dynamic features in advanceand then efficiently decide online control decisions. As aresult, the novel fuzzy-based IMC proves the capability tooutperform conventional PID controller.
The remainder of this paper is organized as follows:Section 2 presents the experimental configuration of thePAM manipulator system. Section 3 presents the PSOalgorithm. In Section 4 a procedure for modelling of thedirect and inverse adaptive fuzzy models using PSO isdiscussed. Section 5 presents the new fuzzy-based IMCcontrol scheme. Sections 6 and 7 present experimentalresults and the analysis of the proposed controller appliedto the PAM manipulator. Finally, Section 8 presentsconclusions of the study.
133
NARX fuzzy scheme, internal model controller, pneumatic artificial mus-
cle manipulator, identified process, fuzzy-based internal model controller, particle swarm optimization
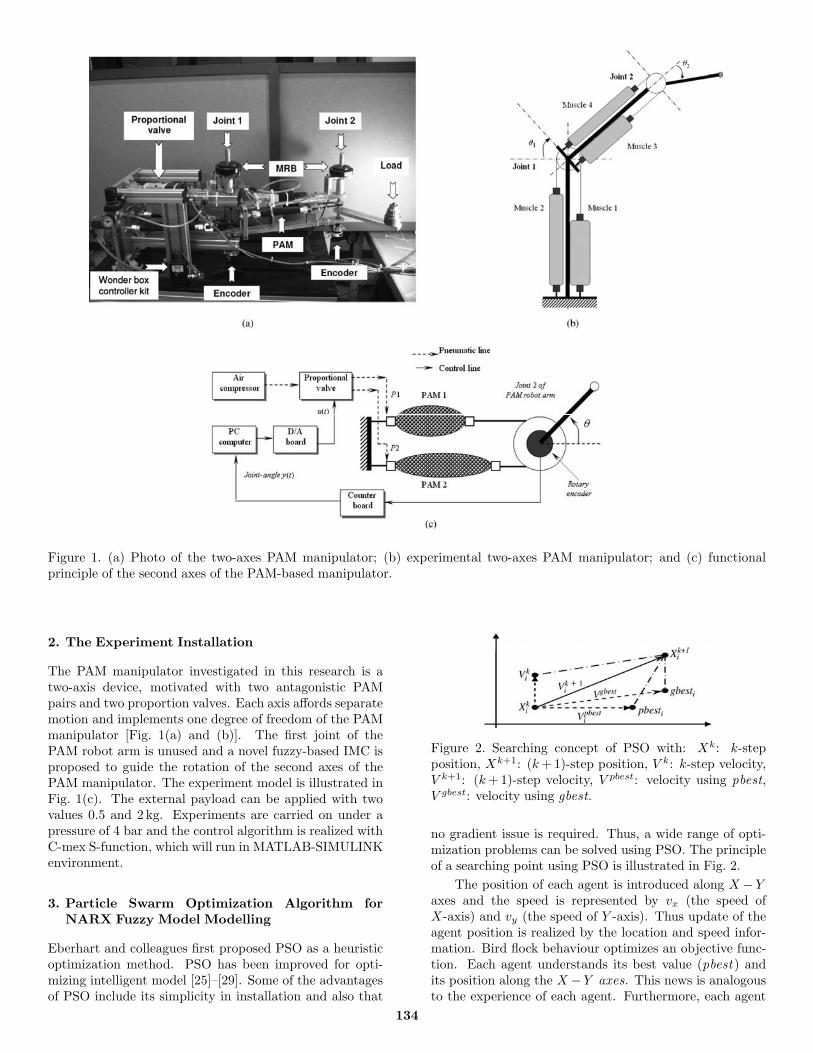
Figure 1. (a) Photo of the two-axes PAM manipulator; (b) experimental two-axes PAM manipulator; and (c) functionalprinciple of the second axes of the PAM-based manipulator.
2. The Experiment Installation
The PAM manipulator investigated in this research is atwo-axis device, motivated with two antagonistic PAMpairs and two proportion valves. Each axis affords separatemotion and implements one degree of freedom of the PAMmanipulator [Fig. 1(a) and (b)]. The first joint of thePAM robot arm is unused and a novel fuzzy-based IMC isproposed to guide the rotation of the second axes of thePAM manipulator. The experiment model is illustrated inFig. 1(c). The external payload can be applied with twovalues 0.5 and 2 kg. Experiments are carried on under apressure of 4 bar and the control algorithm is realized withC-mex S-function, which will run in MATLAB-SIMULINKenvironment.
3. Particle Swarm Optimization Algorithm forNARX Fuzzy Model Modelling
Eberhart and colleagues first proposed PSO as a heuristicoptimization method. PSO has been improved for opti-mizing intelligent model [25]–[29]. Some of the advantagesof PSO include its simplicity in installation and also that
Figure 2. Searching concept of PSO with: Xk: k-stepposition, Xk+1: (k+1)-step position, V k: k-step velocity,V k+1: (k+1)-step velocity, V pbest: velocity using pbest,V gbest: velocity using gbest.
no gradient issue is required. Thus, a wide range of opti-mization problems can be solved using PSO. The principleof a searching point using PSO is illustrated in Fig. 2.
The position of each agent is introduced along X −Yaxes and the speed is represented by vx (the speed ofX-axis) and vy (the speed of Y -axis). Thus update of theagent position is realized by the location and speed infor-mation. Bird flock behaviour optimizes an objective func-tion. Each agent understands its best value (pbest) andits position along the X −Y axes. This news is analogousto the experience of each agent. Furthermore, each agent
134

understands the best value (gbest) among pbests. Thisnews is analogous to the knowledge of how the other agentsaround them have realized. Namely, each agent tries tomodify its position using the following informations:1. current positions (x, y)2. current velocities (vx, vy)3. direction to the center of the swarm4. distance between the current position and pbest5. distance between the current position and gbest
The personal best position of the ith agent is repre-sented as:
pbesti = (pbesti,1, pbesti,2, . . . , pbesti,d) (1)
The index of best agent among all of the agents in thepopulation in the d-dimensional space is gbestd. Thevelocity for agent i is recorded as vi =(vi,1, vi,2, . . . , vi,d).The updated velocity and position of each agent can bemodified based on the following formulas [24]:
v(t+1)i,m = wv
(t)i,m + c1Rand()
[pbesti,m − x
(t)i,m
]+ c2Rand()
[gbestm − x
(t)i,m
](2a)
wheren – number of agents in the population,d – dimension of search space of PSO,t – pointer of iterations (generations),
v(t)i,m – velocity of agent i at iteration t,w – weight function,c1, c2 – weight factor,rand () – random number (between 0 and 1),
x(t)i,d – current position of agent i at iteration t,
pbest i – personal best position of ith agent,gbest – global best of the population.
The following weighting function (derived from [24]) isoften utilized in (2b) to avoid the oscillation in optimizationprocess:
w = wmax − (wmax − wmin)
itermax× iter (2b)
wherewmax: desirable upper bounds of w,wmin: desirable lower bounds of w,itermax: maximum iteration number,iter : current iteration number.
Using the above equations, a certain velocity, which grad-ually gets close to pbest and gbest, can be calculated. Thecurrent position can be updated as follows [25]:
Xt+1i = Xt
i + V t+1i (3)
Figure 3 presents a flow chart of the PSO-based iden-tification procedure. The proposed PSO combines twomodified strategies used to enhance the PSO. The elitiststrategy confirms a steady improvement in the maximizedfitness searching. Furthermore, the extinction strategykeeps the searching procedure from being trapped in a localsolution. Thus, the overall effectiveness and the optimizedglobal solution are together strongly improved with thesemodified tools.
Figure 3. Flow chart of the PSO-based identification pro-cedure.
4. Proposed PSO-based NARX Fuzzy Model ofPAM Manipulator System
4.1 NARX Fuzzy Model of PAM-based Manipula-tor
The novel adaptive fuzzy model of the dynamic PAMmanipulator investigated in this paper is realized by in-corporating the approximating potentiality of the fuzzyscheme with the prediction ability of the ARX model. Thenovel model installs a relation between the previous inputand output values, and predicted output. This can bepresented as:
y(k) = f (y(k − 1), . . . , y(k − na), u(k − nd), . . . ,
u(k − nb − nd)) (4)
Here, na and nb are the maximal lag designed for the inputand output components, nd is the dead time and ffiguresthe function of the fuzzy system.
The novel NARX fuzzy model structure interlaces thelocal linear, time-invariant (LTI) ARX structure as:
Rule j: if z1(k) is A1,j and . . . and zn(k) is An,j then:
yj(k) =
na∑i=1
ajiyj(k − i) +
nb∑i=1
bjiu(k − i− nd) + cj (5)
where zi(k), i=1 . . . n is the component of the Z(k)scheduling vector which is a subset of the X(k) regressorthat composes of the parameters related to the non-linearfunctionality of the plant. In this research, X(k) regressor
135

Figure 4. Diagram of the PSO-based inverse NARX11fuzzy model identification.
Figure 5. Diagram of the PSO-based forward fuzzyNARX11 model identification.
composes all of the input variables of the NARX fuzzyscheme:
Z(k) ∈ X(k) = {y(k − 1), . . . , y(k − na),
u(k − nd), . . . , u(k − nb − nd)} (6)
The fj(q(k)) represents the consequent function whichholds all the regressors q(k)= [X(k) 1],
fj (q (k)) =
na∑i=1
ajiy (k − i) +
nb∑i=1
bjiu (k − i− nd) + cj (7)
As a result, comparing the NARX fuzzy model and theconventional TS fuzzy one, it is observed that the TS fuzzymodel output is unchanged and linear, whereas the NARXfuzzy scheme output is a non-linear and adaptive function.Nevertheless, both of these procedures obtain the similarfuzzy inference structure (FIS).
4.2 PSO-based NARX Fuzzy Scheme Modelling
Researchers always pay attention to the problem of non-linear plant identification. Some findings using a fuzzymodel have based on expert knowledge [23], [24]. Then theobtained fuzzy model is often too cumbersome to be used in
Table 1PSO-based NARX Fuzzy Model Variables Applied for
Coding
Variables Range Accuracy Bits
Number of MF 3 to 9 2 2
MF scaling 0.1 to 1.0 0.01 7
MF spacing −1 to 1 2 1
Rule-refer. scaling 0.1 to 1.0 0.01 7
Rule-refer. spacing −1 to 1 2 1
Input scale 0 to 100 0.1 10
Output scale 0 to 1,000 0.1 14
Rule-refer. joint 0 to 2π π/512 11
practice and then only simulations can be realized. Figures4 and 5 illustrate the schemes for the modelling of PSO-based direct NARX11 and inverse NARX11 fuzzy struc-tures based on experiment input–output learning data.This way helps to simplify the identification process fornon-linear plants. PSO is applied to optimally select theFIS structure and other parameters of the proposed fuzzyNARX scheme.
The diagrams shown in Figs. 4 and 5 clarify thePSO-based NARX fuzzy model modelling procedure. Theerror e(k)=U(k)−Uh(k) is applied by PSO tool to deter-mine the fitness value [see (8)] to model and optimize theNARX11 fuzzy model parameters of the PAM manipulatorsystem.
Fj = 104
(1
M
M∑k=1
(y(k)− yj(k))2
)−1
(8)
To run a PSO, available encoding must be adopted forall the parameters. Hence the variables presented inTable 1 are applied with the bounds and accuracy shown.Binary encoding is applied because it permits the PSOto be more flexible in exploring the solution space. Themembership functions (MFs) is restricted to uneven values,which is among (3–9) during applying the PSO-based PAMmanipulator NARX fuzzy model.
5. NARX Fuzzy Model Identification Results
The process applied to modelling the highly non-linear sys-tem (PAM-based manipulator in this case) which composesof four necessary steps:• Step 1: obtaining I/O learning data• Step 2: choosing desired model• Step 3: estimating proposed model• Step 4: validating proposed model
To perform Step 1, the PRBS input is used to investigatethe PAM manipulator and the resulting axes angle valueis obtained. This experiment PRBS I/O data is appliedto estimate and validate not only the direct NARX fuzzy
136
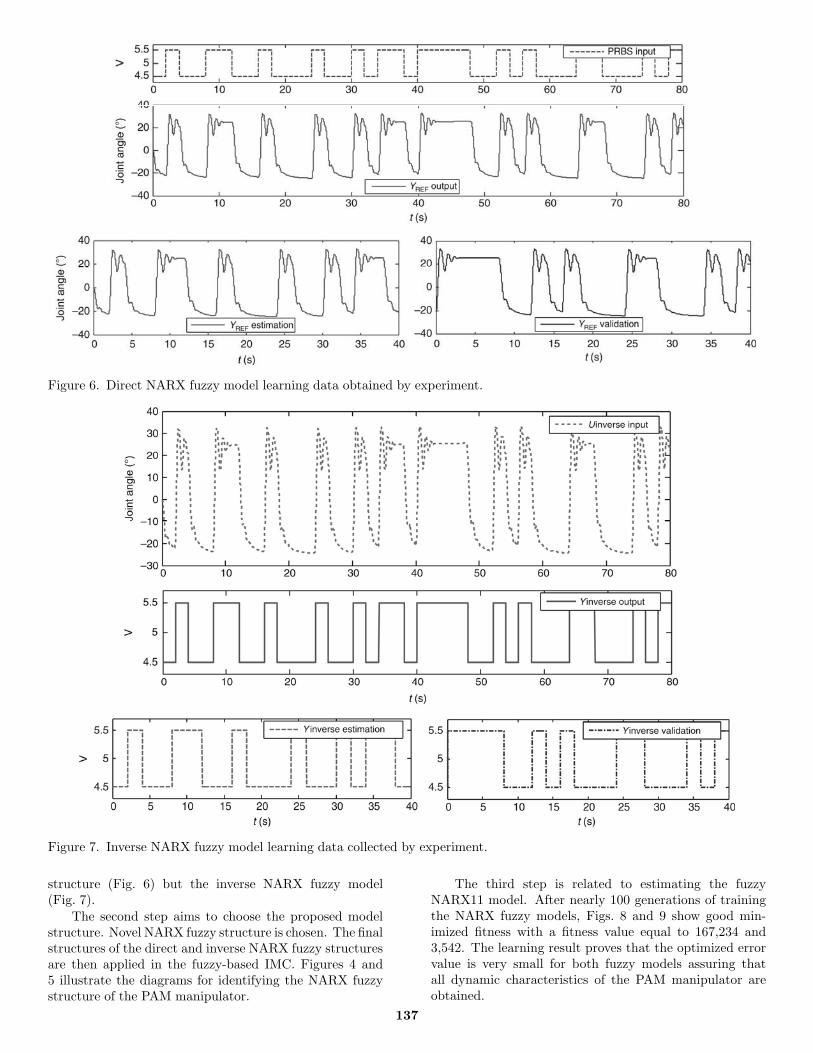
Figure 6. Direct NARX fuzzy model learning data obtained by experiment.
Figure 7. Inverse NARX fuzzy model learning data collected by experiment.
structure (Fig. 6) but the inverse NARX fuzzy model(Fig. 7).
The second step aims to choose the proposed modelstructure. Novel NARX fuzzy structure is chosen. The finalstructures of the direct and inverse NARX fuzzy structuresare then applied in the fuzzy-based IMC. Figures 4 and5 illustrate the diagrams for identifying the NARX fuzzystructure of the PAM manipulator.
The third step is related to estimating the fuzzyNARX11 model. After nearly 100 generations of trainingthe NARX fuzzy models, Figs. 8 and 9 show good min-imized fitness with a fitness value equal to 167,234 and3,542. The learning result proves that the optimized errorvalue is very small for both fuzzy models assuring thatall dynamic characteristics of the PAM manipulator areobtained.
137

Figure 8. Fitness convergence of inverse fuzzy NARX11 model.
Figure 9. Fitness value of forward fuzzy NARX11 model.
The fourth step aims to confirm the modelled adaptivefuzzy structures using the diagram in Fig. 1. Figures 10and 11 provide good validating results demonstrating thegood performance of novel adaptive fuzzy structure.
A very good result of the PRBS voltage output error(<0.4V) is illustrated in Figure 10. Similarly, a very goodresult of the joint angle output error (<8◦) is presentedin Figure 11, which demonstrates the performance of theproposed forward fuzzy NARX model. These good identi-fication results of our new direct and inverse NARX fuzzystructures play an important role for the success of theproposed fuzzy-based IMC strategy in trajectory trackingcontrol of the dynamic PAM manipulator.
In summary, all of the main results of the PSO-baseddirect and inverse NARX fuzzy model modelling applied tothe non-linear PAM manipulator are summarized in Tables2 and 3. Table 2 tabulates optimal parameters of the newinverse NARX fuzzy model, and Table 3 summarizes theresulting parameters of the forward NARX fuzzy model ofthe PAM robot arm.
Based on Table 2, we see that with the initial parame-ters for the PSO-based modelling process (population=40and generation=100), the novel inverse fuzzy model pro-vides a good fitness convergence. Consequently, the in-verse NARX fuzzy model (error<±0.1V with the inverseNARX11 fuzzy model) proves to be very good result.
The same analytical issues can be deduced fromTable 3. From Table 3, we see that with population=40and generation=100, the forward NARX fuzzy modelgives a good fitness convergence. As such, the error of thenew forward NARX fuzzy model (error <±0.1V with theforward NARX11 fuzzy model) proves to be a very goodresult. Thus, these results prove the good performance ofthe novel adaptive fuzzy model for applying not only inidentification but in precise control schemes.
6. New NARX Fuzzy-based IMC
Consider the PAM manipulator system illustrated inFig. 12, G(s) is the PAM manipulator, Gm(s) is the directmodel, R(s) is the referential signal, U(s) presents thecontrol input, D(s) represents the external disturbances,Y (s) represents the real system G(s) output, Y h(s) is thedirect model output of Gm(s) and N(s) represents themeasurement disturbance. C(s) is considered the IMCcontrol scheme which is installed such that y(t) being asclose to r(t) as possible. From Fig. 12, the IMC potentialis proven as:
Y (s) = G(s) · U(s) +D(s)
B(s) = Y (s) +N(s)−Gm(s) · U(s)
U(s) = C(s)[R(s)−B(s)]
(9)
138

Figure 10. Validation of PAM-based manipulator inverse fuzzy model.
Figure 11. Validation of PAM-based manipulator forward fuzzy model.
Eliminating U(s) and B(s) from (9) we have:
Y (s) =G(s) · C(s) ·R(s)
1 + C(s)[G(s)−Gm(s)]+
D(s) · [1− C(s) ·Gm(s)]
1 + C(s) · [G(s)−Gm(s)]
− G(s) · C(s) ·N(s)
1 + C(s)[G(s)−Gm(s)](10)
The sensitivity function S(s) is:
S(s) =Y (s)
D(s)=
1− C(s) ·Gm
1 + C(s) · (G(s)−Gm(s))(11)
And we have:
T (s) = 1− S(s) =C(s) ·G(s)
1 + C(s) · [G(s)−Gm(s)](12)
139
(s)
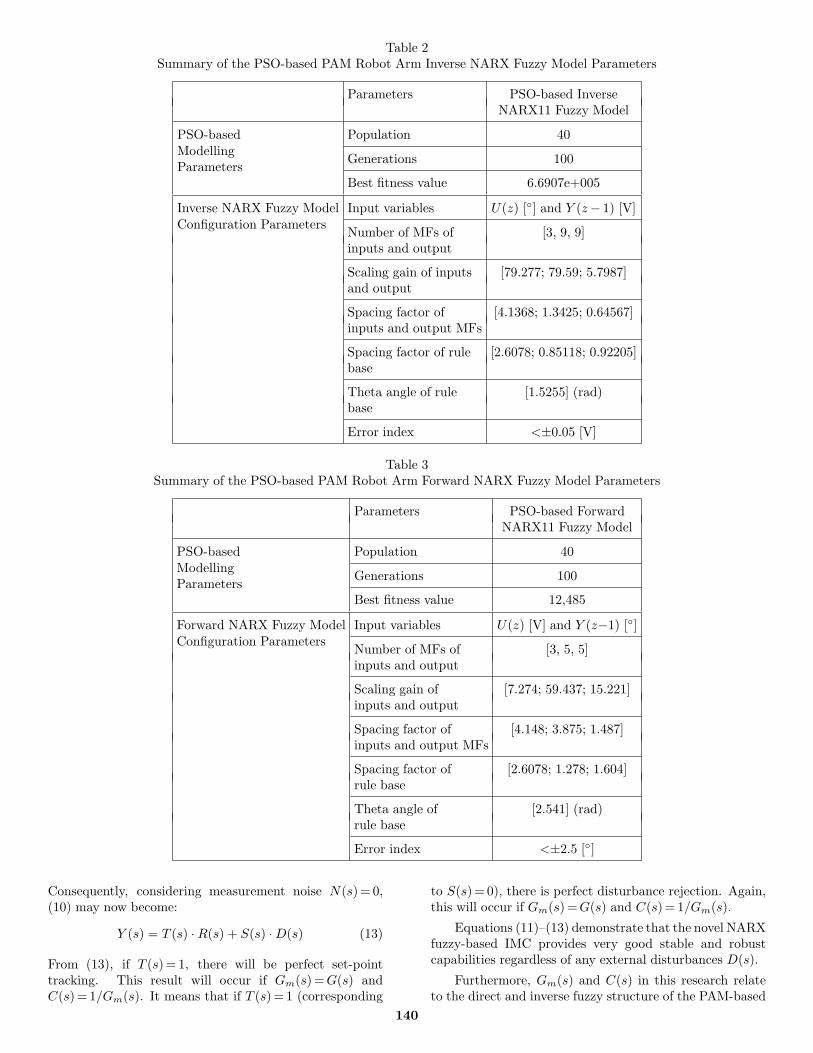
Table 2Summary of the PSO-based PAM Robot Arm Inverse NARX Fuzzy Model Parameters
Parameters PSO-based InverseNARX11 Fuzzy Model
PSO-based Population 40Modelling
Generations 100Parameters
Best fitness value 6.6907e+005
Inverse NARX Fuzzy Model Input variables U(z) [◦] and Y (z− 1) [V]Configuration Parameters
Number of MFs of [3, 9, 9]inputs and output
Scaling gain of inputs [79.277; 79.59; 5.7987]and output
Spacing factor of [4.1368; 1.3425; 0.64567]inputs and output MFs
Spacing factor of rule [2.6078; 0.85118; 0.92205]base
Theta angle of rule [1.5255] (rad)base
Error index <±0.05 [V]
Table 3Summary of the PSO-based PAM Robot Arm Forward NARX Fuzzy Model Parameters
Parameters PSO-based ForwardNARX11 Fuzzy Model
PSO-based Population 40Modelling
Generations 100Parameters
Best fitness value 12,485
Forward NARX Fuzzy Model Input variables U(z) [V] and Y (z−1) [◦]Configuration Parameters
Number of MFs of [3, 5, 5]inputs and output
Scaling gain of [7.274; 59.437; 15.221]inputs and output
Spacing factor of [4.148; 3.875; 1.487]inputs and output MFs
Spacing factor of [2.6078; 1.278; 1.604]rule base
Theta angle of [2.541] (rad)rule base
Error index <±2.5 [◦]
Consequently, considering measurement noise N(s)= 0,(10) may now become:
Y (s) = T (s) ·R(s) + S(s) ·D(s) (13)
From (13), if T (s)= 1, there will be perfect set-pointtracking. This result will occur if Gm(s)=G(s) andC(s)= 1/Gm(s). It means that if T (s)= 1 (corresponding
to S(s)= 0), there is perfect disturbance rejection. Again,this will occur if Gm(s)=G(s) and C(s)= 1/Gm(s).
Equations (11)–(13) demonstrate that the novel NARXfuzzy-based IMC provides very good stable and robustcapabilities regardless of any external disturbances D(s).
Furthermore, Gm(s) and C(s) in this research relateto the direct and inverse fuzzy structure of the PAM-based
140
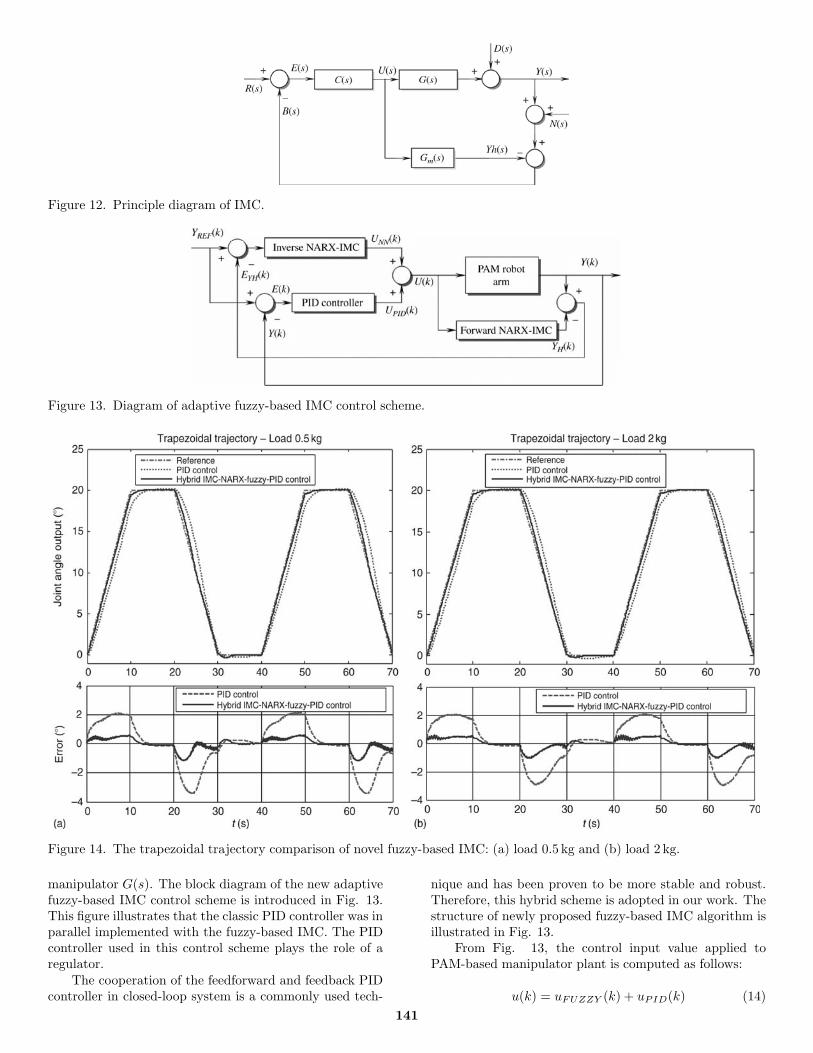
Figure 12. Principle diagram of IMC.
Figure 13. Diagram of adaptive fuzzy-based IMC control scheme.
Figure 14. The trapezoidal trajectory comparison of novel fuzzy-based IMC: (a) load 0.5 kg and (b) load 2 kg.
manipulator G(s). The block diagram of the new adaptivefuzzy-based IMC control scheme is introduced in Fig. 13.This figure illustrates that the classic PID controller was inparallel implemented with the fuzzy-based IMC. The PIDcontroller used in this control scheme plays the role of aregulator.
The cooperation of the feedforward and feedback PIDcontroller in closed-loop system is a commonly used tech-
nique and has been proven to be more stable and robust.Therefore, this hybrid scheme is adopted in our work. Thestructure of newly proposed fuzzy-based IMC algorithm isillustrated in Fig. 13.
From Fig. 13, the control input value applied toPAM-based manipulator plant is computed as follows:
u(k) = uFUZZY (k) + uPID(k) (14)
141
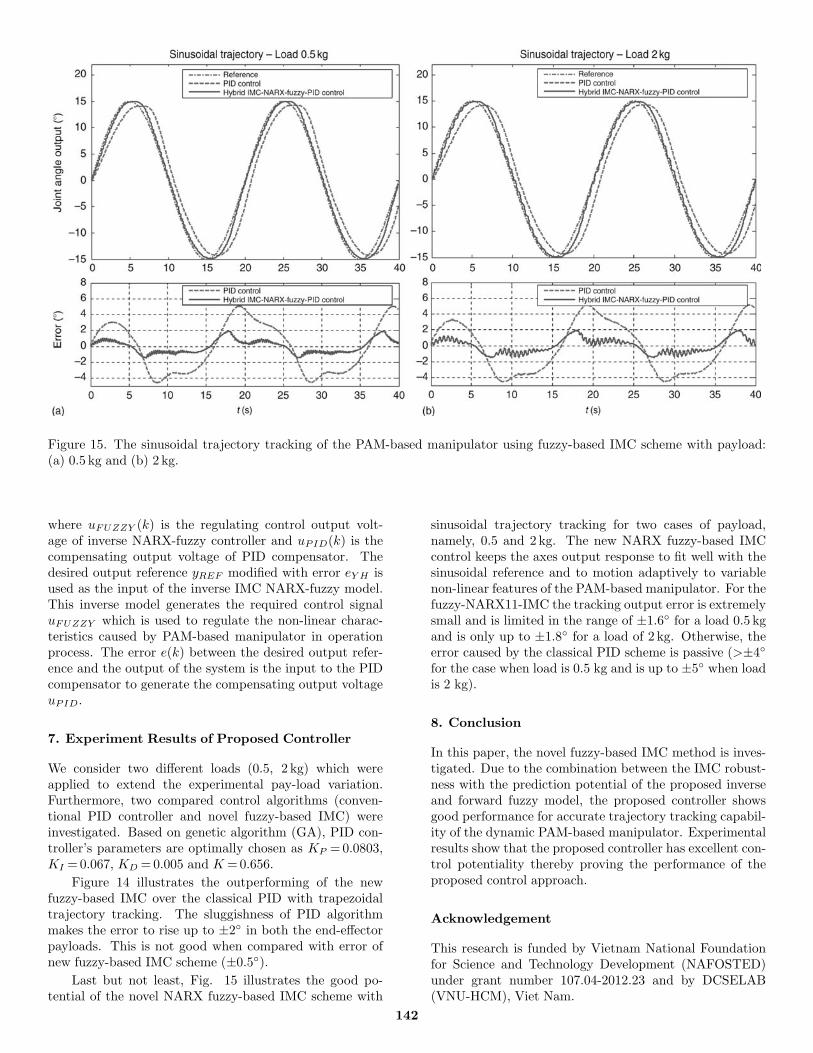
Figure 15. The sinusoidal trajectory tracking of the PAM-based manipulator using fuzzy-based IMC scheme with payload:(a) 0.5 kg and (b) 2 kg.
where uFUZZY (k) is the regulating control output volt-age of inverse NARX-fuzzy controller and uPID(k) is thecompensating output voltage of PID compensator. Thedesired output reference yREF modified with error eY H isused as the input of the inverse IMC NARX-fuzzy model.This inverse model generates the required control signaluFUZZY which is used to regulate the non-linear charac-teristics caused by PAM-based manipulator in operationprocess. The error e(k) between the desired output refer-ence and the output of the system is the input to the PIDcompensator to generate the compensating output voltageuPID.
7. Experiment Results of Proposed Controller
We consider two different loads (0.5, 2 kg) which wereapplied to extend the experimental pay-load variation.Furthermore, two compared control algorithms (conven-tional PID controller and novel fuzzy-based IMC) wereinvestigated. Based on genetic algorithm (GA), PID con-troller’s parameters are optimally chosen as KP =0.0803,KI =0.067, KD =0.005 and K =0.656.
Figure 14 illustrates the outperforming of the newfuzzy-based IMC over the classical PID with trapezoidaltrajectory tracking. The sluggishness of PID algorithmmakes the error to rise up to ±2◦ in both the end-effectorpayloads. This is not good when compared with error ofnew fuzzy-based IMC scheme (±0.5◦).
Last but not least, Fig. 15 illustrates the good po-tential of the novel NARX fuzzy-based IMC scheme with
sinusoidal trajectory tracking for two cases of payload,namely, 0.5 and 2 kg. The new NARX fuzzy-based IMCcontrol keeps the axes output response to fit well with thesinusoidal reference and to motion adaptively to variablenon-linear features of the PAM-based manipulator. For thefuzzy-NARX11-IMC the tracking output error is extremelysmall and is limited in the range of ±1.6◦ for a load 0.5 kgand is only up to ±1.8◦ for a load of 2 kg. Otherwise, theerror caused by the classical PID scheme is passive (>±4◦
for the case when load is 0.5 kg and is up to ±5◦ when loadis 2 kg).
8. Conclusion
In this paper, the novel fuzzy-based IMC method is inves-tigated. Due to the combination between the IMC robust-ness with the prediction potential of the proposed inverseand forward fuzzy model, the proposed controller showsgood performance for accurate trajectory tracking capabil-ity of the dynamic PAM-based manipulator. Experimentalresults show that the proposed controller has excellent con-trol potentiality thereby proving the performance of theproposed control approach.
Acknowledgement
This research is funded by Vietnam National Foundationfor Science and Technology Development (NAFOSTED)under grant number 107.04-2012.23 and by DCSELAB(VNU-HCM), Viet Nam.
142
References
[1] P. Carbonell, Z.P. Jiang, and D.W. Repperger, Nonlinearcontrol of a pneumatic muscle actuator: Back-stepping versussliding-mode, Proc. IEEE Int. Conf. on Control Applications,Mexico City, Mexico, 2000, 167–172.
[2] M. Folgheraiter, G. Gini, M. Perkowski, and M. Pivtoraiko,Adaptive reflex control for an artificial hand, Proc. SYROCO2003 Symp. on Robot Control, Holliday Inn, Wroclaw, Poland,2003.
[3] V. Balasubramanian and K.S. Rattan, Feed-forward control ofa non-linear pneumatic muscle system using fuzzy logic, IEEEInternational Conference on Fuzzy Systems, 1, 2003, 272–277.
[4] S.Q. Xie and P.K. Jamwal, An iterative fuzzy controller forpneumatic muscle driven rehabilitation robot, Expert Systemswith Applications, 38 (7), 2011, 8128–8137.
[5] P.K. Jamwal, S.Q. Xie, and S. Quigley, Robust disturbanceobserver-based adaptive fuzzy controller for pneumatic muscleactuators, Proc. ASME Design Engineering Technical Conf.(Parts A AND B), 2011, 795–804.
[6] H.P.H. Anh and K.K. Ahn, Identification of the pneumaticartificial muscle manipulators by MGA-based nonlinear NARXfuzzy model, IFAC Journal of Mechatronics, 19(1), 2009,106–133.
[7] H.P.H. Anh, K.K. Ahn, and J.I. Yoon, Inverse model iden-tification of 2-axes pneumatic artificial muscle (PAM) robotarm using double NARX Fuzzy Model and genetic algorithm,2008 Second Int. Conf. on Communications and Electronics,IEEE-ICCE08, Hoi An, Viet Nam.
[8] H.P.H. Anh and K.K. Ahn, Design and implementation ofan adaptive recurrent neural network (ARNN) controller of apneumatic artificial muscle (PAM) manipulator, IFAC Journalof Mechatronics, 19(6), 2009, 816–828.
[9] Y. Wang, Z. Shi, J. Wang, and R.P.S. Han, Study of smoothand accurate position controls of pneumatic artificial mus-cle actuators for robotic arms, Advanced Materials Research,317–319, 2011, 799–806.
[10] M.J. Er and S.Q. Wu, A fast learning algorithm for parsimo-nious fuzzy neural systems, Fuzzy Sets and Systems, 126(3),2002, 61–75.
[11] K.K. Ahn and H.P.H. Anh, A new approach of modelingand identification of the pneumatic artificial muscle (PAM)manipulator based on neural network, IMechE, Part I: Journalof Systems and Control Engineering, 221(18), 2007, 1101–1122.
[12] G.S. Ng, F. Liu, T.F. Loh, and C. Quek, A novel brain-inspiredneuro-fuzzy hybrid system for artificial ventilation modeling,Expert Systems with Applications, 39(15), 2012, 11808–11817.
[13] H.P.H. Anh, Online tuning gain scheduling MIMO neural PIDcontrol of the 2-axes pneumatic artificial muscle (PAM) robotarm, Journal of Expert Systems with Applications, 37(9), 2010,6547–6560.
[14] H.P.H. Anh and K.K. Ahn, Hybrid control of a pneumatic ar-tificial muscle (PAM) robot arm using an inverse NARX fuzzymodel, International Scientific Journal Engineering Applica-tions of Artificial Intelligence (EAAI Journal ), 24(4), 2011,697–716.
[15] Z.-g. Su, P.-h. Wang, J. Shen, Y.-g. Li, Y.-f. Zhang, andE.-j. Hu, Automatic fuzzy partitioning approach using variablestring length artificial bee colony (VABC) algorithm, AppliedSoft Computing, 12(11), 2012, 3421–3441.
[16] B.M. Al-Hadithi, A. Jimenez, and F. Matıa, A new approach tofuzzy estimation of Takagi–Sugenomodel and its applications tooptimal control for nonlinear systems, Applied Soft Computing,12(1), 2012, 280–290.
[17] K.K. Ahn and H.P.H. Anh, Inverse double NARX fuzzymodeling for system identification, IEEE/ASME Journal ofMechatronics, 15(1), 2010, 136–148.
[18] H.P.H. Anh, Implementation of Fuzzy NARX IMC PID controlof PAM robot arm using Modified Genetic Algorithms, 2011IEEE 5th Int. Workshop on Genetic and Evolutionary FuzzySystems (GEFS ), 2011.
[19] A. Datta and J. Ochoa, Adaptive internalmodel control: Designand stability analysis, Automatica, 32 (2), 1996, 261–266.
[20] I. Rivals and L. Personnaz, Nonlinear internal model controlusing neural networks: Application to processes with delay and
design issues, IEEE Transactions on Neural Networks, 11(1),2000, 80–90.
[21] J. Sousa, R. Babuska, and H. Verbruggen, Internal modelcontrol with a fuzzy model: Application to an air-conditioningsystem, Proc. Sixth IEEE Int. Conf. on Fuzzy Systems, 1,1997, 207–212.
[22] W.F. Xie and A.B. Rad, Fuzzy adaptive internal model control,IEEE Transactions on Industrial Electronics, 47(1), 2000,193–202.
[23] X. Wen, J. Zhang, Z. Zhao, and L. Liu, Multi-model neuralnetwork IMC, Proc. of 2004 Int. Conf. on Machine Learningand Cybernetics, 6, 2004, 3370–3374.
[24] C. Yu, J. Zhu, and Z. Sun, Nonlinear adaptive internalmodel control using neural networks for tilt rotor aircraftplatform, IEEE Mid-Summer Workshop on Soft Computingin Industrial Applications, Helsinki University of Technology,Espoo, Finland, June 2005, 535–536.
[25] J. Kennedy and R. Eberhart, Particle swarm optimization,Proc. IEEE Int. Conf. on Neural Network, 4, 1995, 1942–1948
[26] H. Yoshida, K. Kawata, Y. Fukuyama, S. Takayama, and Y.Nakanishi, A particle swarm optimization for reactive powerand voltage control considering voltage security assessment,IEEE Transactions on Power Systems, 15(4), 2000, 1232–1239.
[27] Z.L. Gaing, A particle swarm optimization approach for opti-mum design of PID controller in AVR system, IEEE Transac-tions on Energy Conversion, 19(2), 2004, 384–391.
[28] D. Chen, J. Wang, F. Zou, H. Zhang, and W. Hou, Linguisticfuzzy model identification based on PSO with different lengthof particles, Applied Soft Computing, 12(11), 2012, 3390–3400.
[29] N. Doan Ngoc Chi, T. Dinh Quang, J.I. Yoon, and K.K.Ahn, Identification of ionic polymer metal composite actuatoremploying fuzzy NARX model and particle swam optimization,Int. Conf. on Control, Automation and Systems, Busan-Korea,2011, 1857–1861.
Biography
143
Ho P.H. Anh received the B.S. and the M.Sc. degrees from the Faculty of Electrical and Elec-tronic Engineering at Ho Chi Minh City University of Tech-nology in 1987 and in 1993, re-spectively. He received the Ph.D. degree from the University of Ulsan, Korea, in 2008. He is cur-rently a senior lecturer in the Faculty of Electrical and Elec-tronic Engineering, HCM City
University of Technology, Ho Chi Minh City, Viet Nam. His current research interests include intelligent control, robotics, renewable energy applications, modelling – iden-tification and control of non-linear dynamic systems.