Numerical studies of quasi-static tectonic loading and dynamic rupture of bi-material interfaces
19
CONCURRENCY AND COMPUTATION: PRACTICE AND EXPERIENCE Concurrency Computat.: Pract. Exper. 2010; 22:1684–1702 Published online 17 November 2009 in Wiley InterScience (www.interscience.wiley.com). DOI: 10.1002/cpe.1540 Numerical studies of quasi-static tectonic loading and dynamic rupture of bi-material interfaces S. Langer ∗, † , L. M. Olsen-Kettle, D. K. Weatherley, L. Gross and H.-B. M¨ uhlhaus The University of Queensland, Earth Systems Science Computational Centre, Brisbane, Qld. 4072, Australia SUMMARY Dynamic simulations of homogeneous and bi-material fault rupture are modeled using different loading approaches. We demonstrate that a numerical method of quasi-static loading is capable of immediately loading bi-material interfaces to rupture without the iteration over multiple time steps. We show that our method is a computationally inexpensive approach to tectonic loading and is capable of loading a fault to failure. We observe earthquake rupture speed, slip distances and slip rates for homogeneous and bi-material faults for various applied stresses, friction properties and material contrasts across the bi-material interface. We comment on causes for unilateral rupture growth. The results are consistent with experimental results and highlight the importance of material heterogeneity in determining the rupture characteristics of earthquake faults. Copyright © 2009 John Wiley & Sons, Ltd. Received 10 November 2008; Revised 6 August 2009; Accepted 7 September 2009 KEY WORDS: earthquake dynamics; bi-material interface; fault rupture; tectonic loading 1. INTRODUCTION Earthquakes occur as a result of the stress concentration along faults, driven by the slow relative motion of tectonic plates. When sufficient stress has accumulated, such that the fault has reached its shear failure strength, the fault ruptures in an earthquake. This paper addresses the issue of tectonic loading in numerical earthquake models and the simulation of the resulting dynamic rupture. These two stages are modeled independently in our numerical code: first, slow tectonic loading of the ∗ Correspondence to: S. Langer, The University of Queensland, Earth Systems Science Computational Centre, Brisbane, Qld 4072, Australia. † E-mail: [email protected] Copyright 2009 John Wiley & Sons, Ltd.
Transcript of Numerical studies of quasi-static tectonic loading and dynamic rupture of bi-material interfaces

CONCURRENCY AND COMPUTATION: PRACTICE AND EXPERIENCEConcurrency Computat.: Pract. Exper. 2010; 22:1684–1702Published online 17 November 2009 inWiley InterScience (www.interscience.wiley.com). DOI: 10.1002/cpe.1540
Numerical studies ofquasi-static tectonic loadingand dynamic rupture ofbi-material interfaces
S. Langer∗,†, L. M. Olsen-Kettle, D. K. Weatherley, L. Grossand H.-B. Muhlhaus
The University of Queensland, Earth Systems Science Computational Centre,Brisbane, Qld. 4072, Australia
SUMMARY
Dynamic simulations of homogeneous and bi-material fault rupture are modeled using different loadingapproaches. We demonstrate that a numerical method of quasi-static loading is capable of immediatelyloading bi-material interfaces to rupture without the iteration over multiple time steps. We show thatour method is a computationally inexpensive approach to tectonic loading and is capable of loading afault to failure. We observe earthquake rupture speed, slip distances and slip rates for homogeneousand bi-material faults for various applied stresses, friction properties and material contrasts across thebi-material interface. We comment on causes for unilateral rupture growth. The results are consistent withexperimental results and highlight the importance of material heterogeneity in determining the rupturecharacteristics of earthquake faults. Copyright © 2009 John Wiley & Sons, Ltd.
Received 10 November 2008; Revised 6 August 2009; Accepted 7 September 2009
KEY WORDS: earthquake dynamics; bi-material interface; fault rupture; tectonic loading
1. INTRODUCTION
Earthquakes occur as a result of the stress concentration along faults, driven by the slow relativemotion of tectonic plates. When sufficient stress has accumulated, such that the fault has reached itsshear failure strength, the fault ruptures in an earthquake. This paper addresses the issue of tectonicloading in numerical earthquake models and the simulation of the resulting dynamic rupture. Thesetwo stages are modeled independently in our numerical code: first, slow tectonic loading of the
∗Correspondence to: S. Langer, The University of Queensland, Earth Systems Science Computational Centre, Brisbane,Qld 4072, Australia.
†E-mail: [email protected]
Copyright q 2009 John Wiley & Sons, Ltd.

QUASI-STATIC LOADING AND DYNAMIC RUPTURE OF BI-MATERIALS 1685
fault is modeled quasi-statically to accumulate sufficient stress to rupture the fault. Second, weutilize an elasto-dynamic model to simulate dynamic rupture and the ensuing wave propagation inthe surrounding region. The separation of the two processes has distinct computational advantagesover purely elastodynamic models, in which the majority of the computation time is expendedon tectonic loading. Consequently our model permits the simulation of multiple stick–slip cycleswith greater ease and flexibility [1]. Section 2 describes the fast numerical implementation of theslow tectonic loading phase. In Section 3 we examine the rupture characteristics of earthquakesoccurring along both homogeneous and bi-material interfaces. We conclude with a discussion ofthe implications of our results for crustal earthquakes.
2. NUMERICAL METHOD FOR QUASI-STATIC LOADING
In a previous study on dynamic rupture, Olsen-Kettle et al. [2] utilized an analytical method forquasi-static loading. In this method the strain is applied analytically through the displacement vectorfield for the model region. This can be easily done for homogeneous materials and in certain simplecases for bi-material interfaces. However, analytical quasi-static loading cannot be applied in regionsof heterogeneous material properties (such as in nature) or for cases of arbitrarily oriented faultsin bi-materials. Lapusta et al. [3], Lapusta and Rice [4] and others propose slow tectonic loadingof a fault with variable time stepping. A similar method is used by Shaw and Rice [5]. Duan andOglesby [6] and Olsen-Kettle et al. [1] load faults analytically to failure during interseismic phases.Kame et al. [7] impose fixed displacement boundary conditions to attain remotely applied stress intheir fault growth model.We have developed a numerical method for quasi-static loading that is applicable for both ho-
mogeneous and heterogeneous regions. The objective is to load a fault to failure in a single step,by computing the stress increment required to initiate rupture and applying this increment as aboundary condition for the quasi-static solution of the static elastic deformation equation. Thestress increment is calculated by applying the Coulomb Failure Criterion [8, p. 106] along thefault to identify the point with the smallest stress deficit. We then calculate the necessary stressincrement for an unknown principal stress �Y for a given principal stress �X which will load thefault to failure. The numerical method is explained in detail in Section 2.1 and an application tohomogeneous and bi-material interfaces is shown in Section 2.2.
2.1. Implementation of quasi-static loading
We study numerical solutions of the static elastic deformation equation using the finite elementmethod (FEM) [9]. Our mesh consists of triangles and is constructed using Gmsh. [10] We haveadapted Gmsh to contain contact joint elements at faults. This approach is similar to the traction-at-split-node method [6,11–13], where the fault is represented as a surface or line discretized by a set ofdouble nodes called split nodes. Each half of the split node belongs to only one side of the fault andmay experience motion relative to its counterpart. The FEM solves the elastic deformation equationin region � (Figure 1), which consists of two materials M1 and M2. The fault, denoted by �, isplaced at the interface between the materials using contact elements. The fault contact elementsare modeled using zero-thickness joint elements where the displacements across the fault can be
Copyright q 2009 John Wiley & Sons, Ltd. Concurrency Computat.: Pract. Exper. 2010; 22:1684–1702DOI: 10.1002/cpe

1686 S. LANGER ET AL.
Figure 1. Model region � containing the Fault �, different materials M1 and M2, the external boundaries B1 andB2 with fixed displacement in the normal direction, the fault normal n1 and the fault tangential �1. � denotes
the angle between the principal stress direction �X and the fault �.
discontinuous. The displacement on the boundaries B1 and B2 in Figure 1 is fixed in the normaldirection. Tangential displacement is possible at these boundaries. These boundary conditions arerequired to adequately constrain the numerical solution and they introduce no artifacts as long asthe tectonic principal stress axes are parallel to the coordinate axes. In our signing convention,negative stresses are compressive and positive stresses are tensile.For the implementation of our model we use esys.escript [14], a python-based environment
for solving partial different equations. Esys.escript solves the equation
−(Aijkluk,l), j = − Xij, j (1)
where we use the Einstein notation. A is a rank 4 tensor, X is a rank 2 tensor and u is a rank 1tensor. The natural boundary conditions on the outer boundary take the form
n j (Aijkluk,l) = n j Xi j (2)
As a constraint, the value of ui can be fixed.Esys.escript supports solution discontinuities over the contact region � in the domain �.
To specify the conditions across the discontinuity, we use a condition for the generalized flux Jwhich is defined as
Jij = Aijkluk,l − Xij (3)
At the fault n1 denotes the normal on the fault interface and Equation (3) becomes
n1j J0ij = n1j J
1ij = ycontact − dcontact[u] (4)
where J 0 and J 1 are the fluxes on side 0 and side 1 of the discontinuity �, respectively. [u]denotes the discontinuity (or jump) in displacement between side 0 and side 1, dcontact and ycontact
are defined later in Equations (10) and (11). The above equation ensures that the normal stress iscontinuous across the fault interface.
Copyright q 2009 John Wiley & Sons, Ltd. Concurrency Computat.: Pract. Exper. 2010; 22:1684–1702DOI: 10.1002/cpe

QUASI-STATIC LOADING AND DYNAMIC RUPTURE OF BI-MATERIALS 1687
During quasi-static loading we solve
−�ij, j = 0 (5)
where � is the applied stress and we solve in the different material regions M1 and M2. We canwrite the elasticity tensor as
Aijkl = ��ij�kl + �(�ik�jl + �il�jk) (6)
where � and � are the Lame coefficients for the materials M1 and M2.We insert Equations (5) and (6) into (1) and using Esys.escript we solve
−((��ij�kl + �(�ik�jl + �il�jk))uk,l), j = �ij, j = 0 (7)
for u. Boundary conditions take the form
n j ((��ij�kl + �(�ik�jl + �il�jk))uk,l) = − n j�ij, j (8)
During quasi-static loading we use a constraint on �, which welds the contact elements at thefault, so that there is no overlap, opening or tangential slip between corresponding nodes on thetwo sides of the fault. This requires the following boundary conditions on the fault where we insertthe elasticity tensor (6) and the elastic deformation equation (5) into Equation (3):
Jij = (��ij�kl + �(�ik�jl + �il�jk))uk,l + �ij (9)
In an iterative process we now minimize the jump [u]. This requirement means that we aresolving the elastic deformation equation for the specified applied stresses subject to the conditionthat the fault interfaces remain welded in the loading phase. We solve the above equations using
dcontact = (En(n1 × n1) + E�(� − n1 × n1)) (10)
and
ycontact = Rn (11)
with
Rn = dcontact[un−1] + Rn−1 (12)
in Equation (4), where En and E� are positive values, used as penalty parameters. With an initialvalue of R0 = (0 0)T four iterations are sufficient to achieve a jump over the fault which is10 orders of magnitude smaller than the smallest non-zero strain in the model region.The system of Equations (7)–(9) and (4) are underconstrained.We implement additional boundary
conditions whereby the two orthogonally oriented outer boundaries B1 and B2 were constrained toonly have tangential displacement. The use of these constraints requires that the principal stresses�X and �Y are aligned with the coordinate axes x and y of the model. We achieve this by rotatingthe fault system in our model before meshing the region. Using a model region � with 135 578triangle elements and two Xeon 2.8GHz quad-core processors on an SGI ICE 8200 EX computer,the calculation time of the displacement vector field was around 30 s.
Copyright q 2009 John Wiley & Sons, Ltd. Concurrency Computat.: Pract. Exper. 2010; 22:1684–1702DOI: 10.1002/cpe

1688 S. LANGER ET AL.
2.2. Quasi-static loading of a homogeneous material
From Section 2.1 we know that we can load a region by applying a stress tensor
�p =[
�X 0
0 �Y
](13)
on the outer boundary. We set �X to a defined value—which in case of real-world geology can beestimated using stress field reconstruction techniques [15,16]—and compute the stress �Y requiredto initiate rupture. To do this we apply the Coulomb failure criterion
� f = �friFn + |F�| − c (14)
at the fault. Rupture is initiated at any point on the fault when � f = 0 ( or � f �0 due to anelastic predictor step). Fn is the normal stress, F� is the tangential stress on the fault, c is thecohesion and �fri is the coefficient of friction. The normal and tangential stresses are calculated afterWu [17, p. 59] as:
Fn = �p · n1 · n1F� = �p · n1 · �1
(15)
For the coefficient of friction �fri, we use the same septic slip-weakening law as [2]:
�fri = �d + (�s − �d)D7b
(Db + |s|)7 (16)
where Db is the characteristic slip distance, s the current plastic slip distance, �s the static and �dthe dynamic coefficient of friction. The slip distance s is the slip since the end of the last ruptureevent. This allows healing to occur, so that pulse-like rupture is possible with slip-weakening [2].We use a symmetric fractal distribution for �s with the lowest value �s = 0.63 at the midpoint ofour fault (Figure 2). We also define the ratio between dynamic and static coefficient of friction as
r� = �d�s
(17)
which will be varied later in the dynamic rupture phase.Rearranging formulas (14) and (15) and setting � f = 0, which is the condition for the minimum
stress necessary for rupture to occur and assuming a cohesion of c= 0, we obtain
�Y = �X (−�frin1n1 + n1n2)
(�frin2n2 − n2n1)(18)
for F�>0 and
�Y = − �X (�frin1n1 + n1n2)
(�frin2n2 − n2n1)(19)
for F�<0, where n1 and n2 are the vector elements of the normal vector n1 (Figure 1). As wecompute the quasi-static loading before rupture initiation, the current slip is s = 0 and we use
Copyright q 2009 John Wiley & Sons, Ltd. Concurrency Computat.: Pract. Exper. 2010; 22:1684–1702DOI: 10.1002/cpe

QUASI-STATIC LOADING AND DYNAMIC RUPTURE OF BI-MATERIALS 1689
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0 10 20 30 40 50 60 70 80 90 100
µ S
Fault position (m)
Figure 2. The distribution of the static coefficient of friction �s along the fault.
Table I. Materials used in our model. The parameters for the materials are chosenfor their shear wave speed contrasts (SWSC).
Compressional and shear wave speedDensity Lame parameters
Material � (g cm−3) �, � (GPa) VP (km s−1) VS (km s−1) SWSC to Material I (%)
I 3 36.0 6.00 3.46 —II 3 44.4 6.67 3.85 10III 3 49.8 7.06 4.01 15IV 3 56.2 7.50 4.33 20V 3 85.2 9.23 5.33 35
�fri = �s . Solving Equations (18) and (19) will determine which is the maximum and which isthe minimum principal stress of �X and �Y . In our experiments we used five different Mater-ials I–V (Table I), which we chose for their shear wave speed contrast (SWSC). Materials I–IVhave realistic material properties that may occur in crustal earthquakes, whereas Material V ischosen to exaggerate the influence of material contrast in a bi-material setup.Using �1 = −80MPa, �= 70◦ (Figure 1) and the lowest value for �fri = 0.63 in Equation (18), we
obtain the unknown principal stress �Y = −284MPa. Using Equation (19) we obtain �Y = 48MPa.In our experimental setup, we favor conditions akin to those of natural faults in the earth; there-fore, we only consider the compressional value �Y = − 284MPa. Since |�1|>|�3| by conven-tion we conclude that �Y is the maximum principal stress �1, whereas �X = − 80MPa is theminimum principal stress �3. Figure 3 shows the displacement for a homogeneous Material Iin the whole model region for the uncompressed and compressed case. The values of the stresstensor components in the compressed case throughout the domain for numerical quasi-staticloading
�num =( −80.00MPa −1.99 Pa . . . 1.89 Pa
−1.99 Pa . . . 1.89 Pa −283.72MPa
)(20)
Copyright q 2009 John Wiley & Sons, Ltd. Concurrency Computat.: Pract. Exper. 2010; 22:1684–1702DOI: 10.1002/cpe

1690 S. LANGER ET AL.
(a) (b)
Figure 3. (a) Shows the displacement profile for a homogeneous fault without loading withMaterial I, in (b) the model is loaded quasi-statically using �1 = − 284MPa and �3 = − 80MPa.
The displacement is 50× exaggerated for visualization purposes.
match the analytical values closely:
�ana =(−80.00MPa 0
0 −283.47MPa
)(21)
2.3. Loading bi-materials
When applying the stress tensor �p from Equation (13) to the boundary of our model region, thestress is everywhere equal to �p within the model region for homogeneous materials. When usingbi-materials, shear stresses, �, develop at the bi-material interface due to the different elastic moduliand Poisson ratios of the two materials. We cannot apply Equation (18) to bi-materials by using thestress on the boundary. Instead we must compute the stress tensor �� at the fault and calculate theCoulomb Failure Criterion at this location. We cannot apply Equations (15) directly, as the stresstensor field is not uniform and we do not know the relationship between Fn , F� and the stress onthe boundary. Using a prescribed value for �X and setting � f = 0 and c= 0, we numerically solvethe principal stress �Y by inserting the unknown functions Fn(�X , �Y ) and F�(�X , �Y ) into (14):
� f = �friFn(�X , �Y ) + |F�(�X , �Y )| (22)
To numerically solve the above equation, we use the Method of False Position [18], also knownas Regula Falsi. This method is an algorithm for finding roots that retains the prior estimate forwhich the function value has an opposite sign from the function value at the current best estimateof the root. In this way, the Method of False Position keeps the root bracketed. [19] A sequence of
Copyright q 2009 John Wiley & Sons, Ltd. Concurrency Computat.: Pract. Exper. 2010; 22:1684–1702DOI: 10.1002/cpe

QUASI-STATIC LOADING AND DYNAMIC RUPTURE OF BI-MATERIALS 1691
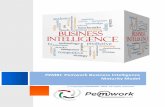
(a) (b)
Figure 4. (a) Shows an unloaded model with �X =�Y = 0, in (b) the model is loaded with �X = − 80MPa and�Y = − 255MPa. Material I is used in the left model region, Material III on the right side. The shear wave
speed contrast amounts to 15%. The displacement is 50× exaggerated for visualization purposes.
shrinking intervals [ak, bk] is produced by calculating iteratively
ck = ak−1 f (bk−1) − bk−1 f (ak−1)
f (bk−1) − f (ak−1)(23)
If f (ck) and f (ak−1) have equal signs, the estimates for the next iteration are set to ak = ckand bk = bk−1. Otherwise, we set ak = ak−1 and bk = ck for the next iteration. When solvingEquation (22) we set the initial estimates for �Y to a0 = 0 and b0 = k�X , where k>0 and k isa value high enough to allow for 0>�Y>k�X . This method only fails when the fault is orientedorthogonal or parallel to �X .Using Materials I and III, �X = − 80MPa, � = 70◦, and the lowest value for �fri = 0.63 in
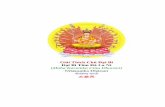
Equation (18), we obtain the minimum principal stress �Y = −255MPa. As |�1|>|�3| by conventionwe conclude that �Y is the maximum principal stress �1 and �X = − 80MPa is the minimumprincipal stress �3. Figure 4 shows the uncompressed and compressed material displacements,where we are using Material I in model region M1 and Material III in model region M2. Figure5 shows the stress distribution throughout the model region. The whole model region � consistsof 135 578 triangle elements. With two Xeon 2.8GHz quad-core processors on an SGI ICE 8200EX computer, the calculation time of the displacement vector field using Regula Falsi was around4min.
3. DYNAMIC RUPTURE PROPAGATION IN BI-MATERIALS
In this chapter we investigate the rupture characteristics at both homogeneous and bi-materialfault interfaces. The initial displacement vector field is set by loading the model region using
Copyright q 2009 John Wiley & Sons, Ltd. Concurrency Computat.: Pract. Exper. 2010; 22:1684–1702DOI: 10.1002/cpe

1692 S. LANGER ET AL.
(c)
(a) (b)
Figure 5. This figure shows the �1-, �3- and �-components of a stress tensor field in (a)–(c), respectively, for amodel region with two materials with a shear wave speed contrast of 15%. A principal stress �X = −80MPa isapplied at the boundaries in the direction of the x-axis and �Y is calculated in the direction of the y-axis so that thefault is loaded to failure. Owing to the different Materials I (left model region) and III (right model region), shearstresses can occur and the components of the local stress tensors are not homogeneous. We note that the normalstresses across the fault interface are continuous, however these images show the components for the stress tensor
aligned with the axes of the coordinate system not the fault.
the numerical method for quasi-static loading in Section 2. This is different from the model ofOlsen-Kettle et al. [2], where analytical loading was used. However, simulation of the dynamicrupture phase utilizes the model of Olsen-Kettle et al. [1]. We study numerical solutions of the 2Dwave equation where the penalty method is used to enforce the contact boundary conditions [20–22].The penalty method was also employed by Coker et al. [23], Povirk and Needleman [24] andShi et al. [25] in their implementation of elasto-plasticity at the homogeneous interfaces. Weextend these results and apply the penalty method to the bi-material interfaces as well.Transition from numerical quasi-static loading to dynamic rupture phase: We load the domain
to failure using the numerical method for quasi-static loading and utilize the resulting displacement
Copyright q 2009 John Wiley & Sons, Ltd. Concurrency Computat.: Pract. Exper. 2010; 22:1684–1702DOI: 10.1002/cpe

QUASI-STATIC LOADING AND DYNAMIC RUPTURE OF BI-MATERIALS 1693
vector field as the input for the dynamic rupture phase.We use the same pde solver esys.escriptfor both loading and rupture. Althoughwe solve different partial differential equations, we are able tokeep the data structure and variables in both stages consistent. This allows for a seamless integrationof both the loading and rupture phases. After changing to the dynamic rupture phase and beforeinitiation of the rupture itself we use an artificially high cohesion of 10 times the bulk modulus onthe fault. This allows the fault interface to stabilize without slipping artificially during the rapidloading phase [1]. We introduce absorbing boundary conditions for the acceleration at the gridedges of the model region to reduce the amplitude of wave reflections at the external boundariesusing the method of Cerjan et al. [26], where the amplitude of the acceleration is gradually taperedfrom the physical interior boundary to the grid edges. After the wave reflections have dampenedsufficiently, rupture is initiated by lowering the cohesive factor in a nucleation patch centered atthe weakest point of the fault. This means that at the next time step of the integration scheme thispoint has reached its Coulomb failure strength and starts to slip. The cohesive factor has a minimalvalue at the weakest point and tapers off exponentially toward the edges of the nucleation patch.The cohesive factor is set to zero elsewhere on the fault.Dynamical rupture studies: In the following section we examine rupture velocity, root mean-
square (RMS) slip and RMS slip velocity. We study the effect of varying the maximum principalstress, shear wave speed contrast and the dynamic coefficient of friction, to observe the influenceof these parameters on the rupture characteristics. We also comment on the occurrence of unilateralruptures and its causes. We use five different materials with different shear wave speeds, as shownin Table I. We use the septic slip-weakening law from Equation (16) with a fractal distribution for�s (Figure 2) and vary the dynamic coefficient of friction.
3.1. Verification against analytical quasi-static loading
We verified our numerical method of quasi-static loading against the analytical loading used in [2]by comparing the rupture characteristics in a homogeneous fault model using Material I. We usea 200× 200m2 region (M1 and M2) and a fault length of 100m. The fault � is oriented at a 70◦angle to the principal stress �X = �3, its midpoint is located at the center of the model region �.A nucleation patch 1.5m in size and centered around the midpoint of the fault was used. For failureto occur the Coulomb failure criterion must be met: |F�| = −�friFn +c. A negative cohesion bringsthe fault closer to failure and rupture is initiated. This has the same effect as artificially raisingthe initial shear stress F� to be equal or higher than the frictional strength. Our model required acohesion c= − 3MPa in the nucleation patch.The characteristic slip distance Db in the septic power-law slip-weakening friction law
(Equation (16)) is chosen so that our model is mesh-independent and well-resolved in the con-tinuum limit. This means that the cohesive zone width �0 has to be greater than the mesh spacing�x of the model region: �0>�x [2,12]. To obtain the smallest possible value Db, we assume theleast favorable values for all possible input parameters and calculate Db according to Olsen-Kettleet al. [2]:
Db = 32
9FN
�0 p(1 − r�)�s�
(24)
where p= 7 is the power of the used slip-weakening law and � is the shear modulus of Material I.Setting �0 = �x = 0.78m for the mesh spacing we employed in our model region, r� = 0.69,
Copyright q 2009 John Wiley & Sons, Ltd. Concurrency Computat.: Pract. Exper. 2010; 22:1684–1702DOI: 10.1002/cpe

1694 S. LANGER ET AL.
�s = 0.63, � = 36GPa and FN = 107MPa (the highest occurring normal stress across the faultinterface in our experiments during loading), we get Db = 3.5×10−3 m. This is the lowest possiblevalue for Db for a continuous rupture model; therefore, we set Db higher at Db = 0.01m for allour experiments. Olsen-Kettle et al. [2] showed mesh independence for this friction law and meshsize modeling bi-material regions with 10 and 25% shear wave speed contrast.The loading stress for the analytical loading was determined by prescribing a principal stress
�X and calculating the principal stress �Y necessary to bring the nucleation patch to failure as inEquation (18). We use the compliance matrix to calculate the strain in the domain and apply thisstrain analytically:
ux (t0) = 11
(x − Lx
2
)
uy(t0) = 33
(y − Ly
2
) (25)
where Lx and Ly are the length of the domain in the x- and y-directions of the axis and 11 and33 are the applied strains [2]. For the dynamic rupture we obtain an RMS slip of 0.0188m, anRMS peak slip velocity of 2.28m s−1 and a bilateral rupture velocity of ±2298m s−1. The resultsof numerical quasi-static loading match the analytical loading result to within 0.01% accuracy.
3.2. Dynamic rupture in bi-material interfaces
The numerical method of quasi-static loading allows us to observe dynamic rupture in bi-materialsunder stress. We will discuss the effect of varied tectonic stresses, shear wave speed contrasts anddynamic coefficients of friction. We investigated the difference in bi-material fault rupture alongeither in the positive direction, (the direction of slip in the more compliant material) or in thenegative direction (Figure 6).We use a 200m× 200m model region with a 100m long fault, located in the middle of the
region and oriented 70◦ to the principal stress �X . We apply the septic slip-weakening law fromEquation (16).
Figure 6. Model region � containing the Fault � and different materials M1 and M2. The arrow marked vposdenotes rupture in the positive rupture direction and vneg denotes the negative rupture direction.
Copyright q 2009 John Wiley & Sons, Ltd. Concurrency Computat.: Pract. Exper. 2010; 22:1684–1702DOI: 10.1002/cpe

QUASI-STATIC LOADING AND DYNAMIC RUPTURE OF BI-MATERIALS 1695
Experiment 1: In our first experiment we compare the influence of different loading stresses �Xon the rupture characteristics, where we use a friction ratio of r� = 0.69 and Materials I and III witha shear wave speed contrast of 15% on the interface. The loading stress �X is assigned as −60,−65, −70 and −80MPa, respectively. We then calculate the lowest necessary stress �Y to bringthe fault to failure using the Method of False Position, as described in Section 2.3.Figures 7(a)–(d) show how the loading stress influences rupture propagation. Smaller loading
stresses favor arrest of rupture at fault segments with a higher static coefficient of friction (e.g. at38 and 62m in Figure 2), whereas higher loading stresses permit these boundaries to be breached.In the case of �X = − 60MPa, the applied stress is not sufficient for rupture to propagate beyondthe high friction segment in both directions, in the case of �X = −65MPa (Figure 7(b)) the rupturearrests at the high friction segment in the negative direction only. Higher stresses at the boundary(and consequently higher stress at the weakest point on the fault) lead to bilateral rupture. Table IIshows the rupture characteristics for our examples. We note that—except for Figure 7(a) withrupture arrest at the high friction segments—the rupture speed in the negative direction is lower
0
0.005
0.01
0 20 40 60 80 100 0 20 40 60 80 100
0 20 40 60 80 100 0 20 40 60 80 100
Fault position (m)
Pla
stic
slip
(m
)
0
0.005
0.01
Fault position (m)
Pla
stic
slip
(m
)
0
0.005
0.01
0.015
0.02
Fault position (m)
Pla
stic
slip
(m
)
0.005
0
0.01
0.015
0.02
0.025
Fault position (m)
Pla
stic
slip
(m
)
(a) (b)
(c) (d)
Figure 7. Time histories of plastic slip at regular times of 2ms for different principal stresses �X using abi-material interface with a shear wave speed contrast of 15% and r� = 0.69.
Copyright q 2009 John Wiley & Sons, Ltd. Concurrency Computat.: Pract. Exper. 2010; 22:1684–1702DOI: 10.1002/cpe

1696 S. LANGER ET AL.
Table II. Differences in the prescribed principal stress �X and resulting rupture characteristics.
Quasi-static loading Dynamic rupture characteristics
Rupture speed�X (�3) �Y (�1) Fn F� RMS slip RMS peak(MPa) (MPa) (MPa) (MPa) (m) vpos (m s−1) vneg (m s−1) slip velocity (m s−1)
−60 −191 −78.3 49.4 0.0035 −1099 1141 0.87−65 −207 −84.8 53.5 0.0039 −1424 1096 0.87−70 −223 −91.4 57.6 0.0118 −2027 1474 1.44−80 −255 −104 65.8 0.0150 −2348 1844 1.83
than that in the positive direction as expected from theory and natural observations [27–31]. Wealso note that loading with higher stresses �X and �Y leads to higher rupture speeds. Figure 7(b)shows that the the rupture is more pulse-like when compared with Figures 7(c) and (d) where theslip at the nucleation point is slowing down relative to points along the fault in the positive direction.Using two Xeon 2.8GHz quad-core processors on an SGI ICE 8200 EX computer, the runtime fordynamic rupture until rupture arrest varies between 70 and 95 minutes. Subsequent experimentalsetups show similar calculation times.Experiment 2: In our next experiment we compare the influence of different dynamic friction
coefficients on the rupture characteristics. The friction ratio r� (Equation (17)) takes the values0.690, 0.695, 0.705 and 0.710 to alter the dynamic coefficient of friction. We used Materials Iand III with a shear wave speed contrast of 15% on the interface and set the loading stress to�X = − 80MPa.Figures 8(a)–(d) show that the chosen dynamic coefficient of friction is an important parameter
for determining whether rupture propagation will be unilateral or bilateral. The higher the dynamiccoefficient of friction, the less likely the rupture will propagate beyond a fault segment with ahigh static coefficient of friction. Similar to the results of the first experiment (Figure 7), unilateralrupture propagates in the positive direction. Table III shows the rupture characteristics for varieddynamic coefficients of friction. As shown in previous studies [2,32] pulse-like rupture is morepromoted as the dynamic stress drop decreases, i.e. as r� increases.Experiment 3: In our last experiment we compare the rupture characteristics in bi-material inter-
faces with a 10, 15, 20 and 35% shear wave speed contrast with that of a homogeneous material I.The more compliant material I is always set in region M1, and Materials II, III, IV and V areassigned to region M2. The friction ratio is set to r� = 0.69 and the stress �X = − 80MPa.Figures 9(a)–(d) show time histories of plastic slip for different shear wave speed contrasts. It
can be seen that higher values of shear wave speed contrasts lead to a preference for rupture inthe positive direction. In our experiments, a high shear wave speed contrast did not stop rupturepropagation in the negative direction, but the rupture is slower and the overall slip is lower as materialcontrast increases. Table IV shows the rupture characteristics for the different material contrasts.
3.3. Significance of the experimental results
It has been postulated that heterogeneities govern the rupture speeds along faults [33,34]. This isnot solely the case. In our experiments we use a fractal distribution of friction which is symmetric
Copyright q 2009 John Wiley & Sons, Ltd. Concurrency Computat.: Pract. Exper. 2010; 22:1684–1702DOI: 10.1002/cpe

QUASI-STATIC LOADING AND DYNAMIC RUPTURE OF BI-MATERIALS 1697
0
0.005
0.01
0.015
0.02
0.025
0 20 40 60 80 100
0
0 20 40 60 80 100
20 40 60 80 100 0 20 40 60 80 100
Fault position (m)
Pla
stic
slip
(m
)
0
0.005
0.01
0.015
0.02
Fault position (m)
Pla
stic
slip
(m
)
0
0.005
0.01
Fault position (m)
Pla
stic
slip
(m
)
(a)
0
0.005
0.01
Fault position (m)
Pla
stic
slip
(m
)
(c)
(b)
(d)
Figure 8. Time histories of plastic slip at regular times of 2ms for different values r� using a bi-material interfacewith a shear wave speed contrast of 15% and principal stress �X = − 80MPa.
about the nucleation patch at the midpoint of the fault. Our experiments show a slower rupture inthe negative direction for bi-material interfaces. The rupture growth stops in the negative directionafter a rupture length of 12m in experiment 1 and experiment 2, shown in (Figures 7(a) and (b)) and(8(c), 8(d)), whereas it propagates to the end of the fault in the positive direction for (Figures 7(b))and (8(c)).We find that the rupture speeds are influenced by the direction in the bi-material case, with
approximately similar rupture speeds occurring in the positive direction when compared with thehomogeneous model in Table IV. However, rupture in the negative direction gets slower withincreasing material contrast. This can be seen clearly in the same table, where there is no earlyrupture arrest in the negative direction, even under high material contrast. The general existence ofasymmetric bilateral rupture is in agreement with controlled laboratory experiments carried out byXia et al. [35,36] and numerical results [2,27–31].Our experiments support the idea of a preferred rupture direction [2,27,37–39], as seen in Table IV
where the positive rupture direction becomes increasingly preferential with increasing material
Copyright q 2009 John Wiley & Sons, Ltd. Concurrency Computat.: Pract. Exper. 2010; 22:1684–1702DOI: 10.1002/cpe

1698 S. LANGER ET AL.
Table III. Differences in the dynamic coefficient of friction �d and resulting rupture characteristics.
Quasi-static loading Dynamic rupture characteristics
Rupture speed�X (�3) �Y (�1) Fn F� RMS slip RMS peak
r� = �d�s
(MPa) (MPa) (MPa) (MPa) (m) vpos (m s−1) vneg (m s−1) slip velocity (m s−1)
0.690 −80 −255 −104 65.8 0.0146 −2348 1844 1.830.695 −80 −255 −104 65.8 0.0136 −2226 1682 1.700.705 −80 −255 −104 65.8 0.0057 −1790 965 1.270.710 −80 −255 −104 65.8 0.0045 −1227 1208 1.00
0
0.005
0.01
0.015
0.02
0.025
0 20 40 60 80 100
0
0 20 40 60 80 100
20 40 60 80 100 0 20 40 60 80 100
Fault position (m)
Pla
stic
slip
(m
)
0
0.005
0.01
0.015
0.02
0.002
Fault position (m)
Pla
stic
slip
(m
)
0
0.005
0.01
0.015
0.02
Fault position (m)
Pla
stic
slip
(m
)
(a)
0
0.005
0.01
0.015
Fault position (m)
Pla
stic
slip
(m
)
(c)
(b)
(d)
Figure 9. Time histories of plastic slip at regular times of 2ms for different values of shear wave speed contrastat the bi-material interface using r� = 0.69 and principal stress �X = − 80MPa.
Copyright q 2009 John Wiley & Sons, Ltd. Concurrency Computat.: Pract. Exper. 2010; 22:1684–1702DOI: 10.1002/cpe

QUASI-STATIC LOADING AND DYNAMIC RUPTURE OF BI-MATERIALS 1699
Table IV. Effect of varying shear wave speed contrast. Principal stresses �X , �Y at the boundary, normal andtangential stress at weak point before rupture and resulting rupture characteristics.
Quasi-static loading Dynamic rupture characteristics
Rupture speedShear wave �X (�3) �Y (�1) Fn F� RMS RMS peak slipspeed contrast (MPa) (MPa) (MPa) (MPa) slip (m) vpos (m s−1) vneg (m s−1) velocity (m s−1)
Homogeneous −80 −284 −104 65.5 0.0188 −2298 2298 2.2810% −80 −263 −104 65.6 0.0160 −2335 2022 1.9615% −80 −255 −104 65.8 0.0146 −2348 1844 1.8320% −80 −247 −105 66.2 0.0133 −2348 1660 1.7435% −80 −232 −108 68.2 0.0098 −2250 1217 1.48
contrast. On the other hand, we do not observe unilateral rupture exclusively with bi-materials andbilateral rupture also occurs readily. Our experiments show that local structural properties such asa high dynamic coefficient of friction support a transition from bilateral to unilateral rupture aswell as a transition from crack-like to pulse-like rupture. The laboratory results of Xia et al. [35]showed no occurrence of unilateral rupture in their bi-material experiments.Johnson [40], Das and Aki [41] and Aki [42] proposed that a barrier in one rupture direction
can cause a fault to rupture unilaterally, one possible reason being a high resistance to slip. Thisresistance is important as shown by Olsen-Kettle et al. [2], where unilateral rupture occurred also insome homogeneous materials due to asymmetric heterogeneities imposed by the static coefficient offriction.We show here that the occurrence of unilateral rupture is also very dependent on the materialcontrast. However, only changing the shear wave speed contrast still caused the rupture to remainbilateral in the experiments with symmetric heterogeneities along the fault. Material contrast, thedynamic coefficient of friction and applied stress in combination affect whether rupture propagationis bilateral or unilateral.Shi and Ben-Zion [38] studied the influence of material contrast and the difference between
the static and dynamic coefficient of friction to determine the conditions for unilateral ruptureusing 2D finite-difference calculations. We show similar results, however, we do not see high-frequency oscillations during transition from crack-like to pulse-like rupture. In our work we use afractal distribution of friction along the fault and a power-law slip-weakening frictional law ratherthan a linear slip-weakening law. The power-law slip-weakening frictional law we employ allowsrestrengthening after rupture to occur when the medium has relaxed. This means that pulse-likerupture can be reproduced even for homogeneous faults in agreement with experimental data [2,23].It is also useful to examine the rupture properties against observed data. FromMai and Beroza [43]
we obtain experimental data that compare fault length and mean slip. From these data we derive thatfor a rupture length of 100m the mean slip should be less than 2 cm. Our results for rupture of anentire fault with a rupture length of 100m give RMS slips between 1.2 cm (Figure 7(c)) and 1.9 cm(Table IV, homogeneous case), which are in the same order of magnitude as the observed data Maiand Beroza reported. The stress drop was carefully optimized so that the numerical results were inclose agreement with the observed values. As shown in [2] the more strongly slip-weakening powerlaws were able to match the observed values more closely because smaller stress drops could beemployed giving rise to more realistic scaling between average slip and rupture length. Using thesame stress drops as the septic slip-weakening case for cubic or linear slip-weakening laws often
Copyright q 2009 John Wiley & Sons, Ltd. Concurrency Computat.: Pract. Exper. 2010; 22:1684–1702DOI: 10.1002/cpe

1700 S. LANGER ET AL.
resulted in only a small creep event occurring. This means that higher stress drops are needed forthose laws resulting in often unrealistic larger average slips.
4. CONCLUSION
We present a computationally inexpensive numerical approach for quasi-static loading of homo-geneous and heterogeneous materials and show that the loaded material can initiate the dynamicrupture of a fault. Despite the order of magnitude difference in time scales between the tectonicloading and dynamic rupture phases, we can use the same computational framework for both phases.In the dynamic rupture phase we see asymmetric bilateral and unilateral rupture growth and
examine the possible causes. We show that for a bi-material fault interface, larger rupture speedsoccur in the direction of slip in the more compliant material and smaller rupture speeds occur inthe stiffer material despite using a symmetric distribution of friction about the nucleation patch.A high dynamic coefficient of friction and low loading stress in a bi-material interface are two
independent factors that support a transition from bilateral to unilateral rupture as well as a transitionfrom crack-like to pulse-like rupture.
ACKNOWLEDGEMENTS
This research is supported by The University of Queensland, the Australian Research Council Linkage projectLP0562686 with the Queensland Department of Main Roads and The University of Queensland, and AuScopeLtd which is funded under the National Collaborative Research Infrastructure Strategy (NCRIS) an AustralianCommonwealth Government Programme. Software was developed by the Australian Computational Earth Sys-tems Simulator Major National Research Facility and computations were performed on the Australian EarthSystems Simulator, an SGI ICE 8200 EX supercomputer.
REFERENCES
1. Olsen-Kettle LM, Weatherley D, Gross L, Muhlhaus H-B. Multicycle dynamics of fault systems and static and dynamictriggering of earthquakes. Proceedings of the Australian Earthquake Engineering Society Conference, Wollongong,Australia, 2007.
2. Olsen-Kettle LM, Weatherley D, Saez E, Gross L, Muhlhaus HB, Xing HL. Analysis of slip-weakening frictionallaws with static restrengthening and their implications on the scaling, asymmetry, and mode of dynamic rupture onhomogeneous and bimaterial interfaces. Journal of Geophysical Research 2008; 113. DOI: 10.1029/2007JB005454.
3. Lapusta N, Rice JR, Ben-Zion Y, Zheng G. Elastodynamic analysis for slow tectonic loading with spontaneous ruptureepisodes on faults with rate- and state-dependent friction. Journal of Geophysical Research 2000; 105:765–789.
4. Lapusta N, Rice JR. Nucleation and early seismic propagation of small and large events in a crustal earthquake model.Journal of Geophysical Research 2003; 108. DOI: 10.1029/2001JB000793.
5. Shaw BE, Rice JR. Existence of continuum complexity in the elastodynamics of repeated fault ruptures. Journal ofGeophysical Research 2000; 105:23791–23810.
6. Duan B, Oglesby DD. Multicycle dynamics of nonplanar strike-slip faults. Journal of Geophysical Research 2005; 110.DOI: 10.1029/2004JB003298.
7. Kame N, Saito S, Oguni K. Quasi-static analysis of strike fault growth in layered media. Geophysical Journal International2008; 173(6):309–314. DOI: 10.1111/j.1365-246X.2008.03728.x. Available at: http://www.ingentaconnect.com/content/bsc/gji/2008/00000173/00000001/art00021 [10 October 2008].
8. Brady B, Brown E. Rock Mechanics for Underground Mining. G. Allen and Unwin: London, 1985.9. Zienkiewicz OC, Taylor RL. The Finite Element Method (5th edn). Butterworth-Heinemann: London, Boston, 2000.
Copyright q 2009 John Wiley & Sons, Ltd. Concurrency Computat.: Pract. Exper. 2010; 22:1684–1702DOI: 10.1002/cpe

QUASI-STATIC LOADING AND DYNAMIC RUPTURE OF BI-MATERIALS 1701
10. Geuzaine C, Remacle J-F. Gmsh: A three-dimensional finite element mesh generator with built-in pre- and post-processingfacilities. International Journal for Numerical Methods in Engineering 2009; 79(11):1309–1331.
11. Andrews DJ. Test of two methods for faulting in finite difference calculations. Bulletin of the Seismological Society ofAmerica 1999; 89:931–937.
12. Day SM, Dalguer LA, Lapusta N, Liu Y. Comparison of finite difference and boundary integral solutions to three-dimensional spontaneous rupture. Journal of Geophysical Research 2005; 110. DOI: 10.1029/2005JB003813.
13. Rojas O, Day S, Castillo J, Dalguer LA. Modeling of rupture propagation using high-order mimetic finite differences.Geophysical Journal International 2008; 172:631–650.
14. Gross L, Bourgouin L, Hale AJ, Muhlhaus HB. Interface modeling in incompressible media using level sets in escript.Physics of the Earth and Planetary Interiors 2007; 163:23–34.
15. Zoback ML, Zoback MD, Adams J, Assumpcao M, Bell S, Bergman EA, Blumling P, Brereton NR, Denham D, Ding J,Fuchs K, Gay N, Gregersen S, Gupta HK, Gvishiani A, Jacob K, Klein R, Knoll P, Magee M, Mercier JL, Muller BC,Paquin C, Rajendran K, Stephansson O, Suarez G, Suter M, Udias A, Xu ZH, Zhizhin M. Global patterns of tectonicstress. Nature 1989; 341:291–298. DOI: 10.1038/341291a0.
16. Zoback ML. First- and second-order patterns of stress in the lithosphere: The world stress map project. Journal ofGeophysical Research 1992 97(B8):11703–11728.
17. Wu HC. Continuum Mechanics and Plasticity. Chapman & Hall: Boca Raton, FL, 2005.18. Abramowitz M, Stegun IA. Handbook of Mathematical Functions: With Formulas, Graphs, and Mathematical Tables.
Dover Publications: New York, 1965.19. Press WH, Flannery BP, Teukolsky SA, Vetterling WT. Secant method, false position method, and ridders’ method.
Numerical Recipes in FORTRAN: The Art of Scientific Computing (2nd edn). Cambridge University Press: Cambridge,England, 1992; 347–352.
20. Peric D, Owen DRJ. Computational model for 3-D contact problems with friction based on the penalty method.International Journal for Numerical Methods in Engineering 1992; 35:1289–1309.
21. Laursen TA, Simo JC. A continuum-based finite element formulation for the implicit solution of multibody largedeformation frictional contact problems. International Journal for Numerical Methods in Engineering 1993; 36:3451–3485.
22. Wriggers P. Computational Contact Mechanics (2nd edn). Springer: Berlin, Heidelberg, 2006.23. Coker D, Lykotrafitis G, Needleman A, Rosakis AJ. Frictional sliding modes along an interface between identical elastic
plates subject to shear impact loading. Journal of the Mechanics and Physics of Solids 2005; 53:884–922.24. Povirk GL, Needleman A. Finite element simulations of fiber pull-out. Journal of Engineering Materials and Technology
1993; 115:286–291.25. Shi Z, Ben-Zion Y, Needleman A. Properties of dynamic rupture and energy partition in a solid with a frictional interface.
Journal of the Mechanics and Physics of Solids 2008; 56:5–24.26. Cerjan C, Kosloff D, Kosloff R, Reshef M. A nonreflecting boundary condition for discrete acoustic and elastic wave
equations. Geophysics 1985; 50:705–708.27. Cochard A, Rice JR. Fault rupture between dissimilar materials: Ill-posedness, regularization and slip-pulse response.
Journal of Geophysical Research 2000; 105:891–907.28. Ben-Zion Y. Dynamic ruptures in recent models of earthquake faults. Journal of the Mechanics and Physics of Solids
2001; 49:2209–2244.29. Harris RA, Day SM. Material contrast does not predict earthquake rupture propagation direction. Geophysical Research
Letters 2005; 32(L23301). DOI: 10.1029/2005GL023941.30. Harris RA, Day SM. Effects of a low-velocity zone on a dynamic rupture. Bulletin of the Seismological Society of
America 1997; 87:1267–1280.31. Ampuero JP, Ben-Zion Y. Cracks, pulses and macroscopic asymmetry or dynamic rupture on a bimaterial interface with
velocity-weakening friction. Geophysical Journal International 2008; 172; DOI: 10.1111/j.1365-246X.2008.03736.x.32. Festa G, Vilotte JP. Influence of the rupture initiation on the intersonic transition: Crack-like versus pulse-like modes.
Journal of Geophysical Research 2006; 33. DOI: 10.1029/2006GL026378.33. Mikumo T, Miyatake T. Dynamical rupture process on a three-dimensional fault with non-uniform frictions, and near-field
seismic waves. Geophysical Journal of the Royal Astronomical Society 1978; 54:417–438.34. Andrews DJ. Rupture velocity of plane strain shear cracks. Journal of Geophysical Research 1976; 81:5679–5687.35. Xia K, Rosakis AJ, Kanamori H, Rice JR. Laboratory earthquakes along inhomogeneous faults: Directionality and
supershear. Science 2005; 308:681–684.36. Xia K. Laboratory investigations of earthquake dynamics. PhD Thesis, California Institute of Technology, Pasadena, CA.
Available at: http://etd.caltech.edu/etd/available/etd-02262005-161824/.37. Andrews DJ, Ben-Zion Y. Wrinkle-like slip pulse on a fault between different materials. Journal of Geophysical Research
1997; 102:553–571.38. Shi Z, Ben-Zion Y. Dynamic rupture on a bimaterial governed by slip-weakening friction. Geophysical Journal
International 2006; 165:469–484. DOI: 10.1111/j.1365-246X.2006.02853.x.
Copyright q 2009 John Wiley & Sons, Ltd. Concurrency Computat.: Pract. Exper. 2010; 22:1684–1702DOI: 10.1002/cpe

1702 S. LANGER ET AL.
39. Ben-Zion Y, Andrews DJ. Properties and implications of dynamic rupture along a material interface. Bulletin of theSeismological Society of America 1998 88:1085–1094.
40. Johnson E. On the initiation of unidirectional slip. Geophysical Journal International 1990; 101:125–132. DOI: 10.1111/j.1365-246X.1990.tb00762.x.
41. Das S, Aki K. Fault plane with barriers: A versatile earthquake mode. Journal of Geophysical Research 1977; 82:5658–5670.
42. Aki K. Characterization of barriers on an earthquake fault. Journal of Geophysical Research 1979; 84:6140–6148.43. Mai PM, Beroza GC. Source scaling properites from finite-fault-rupture models. Bulletin of the Seismological Society of
America 2000; 90:604–615.
Copyright q 2009 John Wiley & Sons, Ltd. Concurrency Computat.: Pract. Exper. 2010; 22:1684–1702DOI: 10.1002/cpe