Numerical solution of the Lane-Emden equation
57
M840 Dissertation in mathematics Numerical solution of the Lane-Emden equation Mark Cannon P0114977 Submitted for the MSc in Mathematics The Open University Milton Keynes UK 15 November 2015
-
Upload
khangminh22 -
Category
Documents
-
view
6 -
download
0
Transcript of Numerical solution of the Lane-Emden equation

M840 Dissertation in mathematics
Numerical solution of theLane-Emden equation
Mark Cannon
P0114977
Submitted for the MSc in Mathematics
The Open University
Milton Keynes UK
15 November 2015

Abstract
This dissertation describes the results of an investigation into the numerical
solution of the Lane-Emden equation which is a singular non-linear boundary
value problem. The approach used is the Newton iteration method on a linearised
form of the differential equation. The piecewise polynomial representation is
obtained using B-splines by collocation at Gaussian points.
The mathematical background which is the theoretical basis for the numerical
solution is described. In particular the paper “Collocation at Gaussian points” by
de Boor and Swartz is discussed and how the main theorems show how to solve
non-linear problems efficiently [1].
The Lane-Emden equation can be used as a simple model of the structure of stars.
The numerical solution is compared against those analytic solutions which exist to
investigate the accuracy of the solution. A solution is then obtained for the model
of our sun for which no analytic solution exists and this is used to estimate some
key physical parameters at the core of the sun.
P0114977 2 Mark Cannon

Contents
1 Introduction 5
2 Mathematical background 8
2.1 Piecewise polynomial interpolation . . . . . . . . . . . . . . . . . . . 8
2.2 B-splines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3 B-spline interpolation . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.4 Collocation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.5 Collocation at Gaussian points . . . . . . . . . . . . . . . . . . . . . . 18
2.5.1 Theorem 3.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.5.2 Theorem 4.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.5.3 Finite Element Method . . . . . . . . . . . . . . . . . . . . . . 22
3 Description of problem 24
3.1 Derivation of the Lane-Emden equation . . . . . . . . . . . . . . . . . 25
3.2 Discussion of the Lane-Emden equation . . . . . . . . . . . . . . . . . 27
3.2.1 Analytic solutions . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.2.2 A singular non-linear boundary problem . . . . . . . . . . . . 28
P0114977 3 Mark Cannon

CONTENTS 4
4 Maple investigations 30
4.1 Linearisation of the Lane-Emden equation . . . . . . . . . . . . . . . 30
4.2 Description of the Maple code . . . . . . . . . . . . . . . . . . . . . . 31
4.3 Results of the investigation . . . . . . . . . . . . . . . . . . . . . . . . 34
4.3.1 Accuracy of the method . . . . . . . . . . . . . . . . . . . . . 34
4.3.2 Results for n = 3 . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.3.3 Application of the results to our sun . . . . . . . . . . . . . . 41
5 Conclusion 43
5.1 Summary and discussion of results . . . . . . . . . . . . . . . . . . . 43
5.2 Further areas of study . . . . . . . . . . . . . . . . . . . . . . . . . . 44
A Maple Code 47
B Maple Output 55
Bibliography 57
P0114977 Mark Cannon

Chapter 1
Introduction
This dissertation consists of an investigation into the numerical solution of the
Lane-Emden equation. This is a second order ordinary differential equation
representing a singular non-linear boundary value problem. It is of considerable
historical significance since it has been used to model the internal structure of
stars and remains a topic of active research today.
The approach used to solve the equation is the Newton iteration method on a
linearised form of the differential equation. The piecewise polynomial
representation will be obtained using B-splines by collocation at Gaussian points.
The first part of the investigation in chapter 2 is a review of some of the
mathematical background which is the theoretical basis for the method used to
solve the equation. There is a description of piecewise polynomial interpolation,
B-splines and B-spline interpolation, and the collocation method for solving
differential equations. The Finite Element Method is briefly described and how
there is an analogy with collocation in the way that the error function is minimised
by making it orthogonal. Also some of the results in the seminal paper
“Collocation at Gaussian points” by de Boor and Swartz are described [1]. The
two most important theorems from this paper are Theorem 3.1 which describes
how non-linear problems can be solved efficiently by using Newton’s method and
Theorem 4.1 which shows that Gaussian points are a good choice for the
collocation points. The latter theorem also gives limits on the global errors and at
the knots. At the knots there is also the phenomenon of superconvergence.
In chapter 3 there is a detailed description of the problem that has to be solved. A
P0114977 5 Mark Cannon

1 Introduction 6
brief history of the Lane-Emden equation and its significance to the field of
astrophysics is outlined. The solutions to the equation are known as polytropes
and for a long period these were the only models of stars that were available. The
solution to the Lane-Emden equation shows how the relative density θ varies as a
function of the dimensionless radius ξ.
A derivation of the equation is given using the following three equations: pressure
and density related by a power law; gravitational equilibrium of the fluid and the
equation of mass continuity. The boundary conditions are also discussed and how
they arise from physical considerations. The power law parameter n that relates
the density and pressure corresponds to different states of matter and there is a
description of how different values of n can be used to model different types of
stars. This parameter n is also called the polytropic index. There are also a few
special values of n for which there are analytic solutions and these solutions are
given. The equation has Cauchy boundary conditions making it in effect an initial
value problem. There is an analysis showing that the equation also has a regular
singular point at the boundary and it is also non-linear.
The aim of the investigation however is not just to get a piecewise polynomial
representation of the solution for a particular value of n. The zero of the solution,
that is where θ goes to zero represents the surface of the star where the density
goes to zero. The aim is to calculate this value and also the derivative at the zero
for the model which corresponds to our own sun. These parameters are useful
because they can be used to calculate other internal physical properties of the star
such as the pressure, density and temperature at the core.
In chapter 4 the Maple investigation of the equation is described. First the
equation is linearised using the method in de Boor’s book “A practical guide to
splines” [2] and a general linearised equation for all n is obtained. The Maple
investigation is split into two main parts. The first part obtains numerical
solutions for those values of n where there is an analytic solution. Thus the
accuracy of the method can be determined and this indicates what collocation
parameters are needed to accurately solve the problem for those values of n where
P0114977 Mark Cannon

1 Introduction 7
there is no analytic solution. The second part is to solve the equation for the case
n = 3 which is the model of our sun. All the main changes to the supplied Maple
code are summarised and the new procedures are described. The results of the
Maple investigation are presented in tables and graphs. Finally the values that
have been calculated for n = 3 are used to calculate physical properties at the
centre of the sun and these values are compared to the values predicted by the
modern Standard Solar Model. The values are reasonable agreement considering
how simple the Lane-Emden model is.
In the conclusion in chapter 5 the results are summarised and the efficiency of the
collocation method is considered. An alternative method to collocation is
described which uses numerical integration. The complications that are created by
the singular point on the boundary for this alternative method are also considered
and how they may be avoided by using a power series expansion.
Possible further areas of study are then outlined. Some of these are improvements
in the method itself and others are new areas of investigation. One interesting
possibility is to investigate why the collocation method (or the implementation of
it) failed for non-integer values of the polytropic index n when these were tried.
These correspond to models of neutron stars, red gas giants and giant gaseous
planets like Jupiter. It should also be possible to get an estimate of the
Chandrasekhar limit which is the maximum mass of a dense white dwarf, above
which it collapses into either a neutron star or a black hole.
P0114977 Mark Cannon

Chapter 2
Mathematical background
Many practical problems in applied mathematics do not have an exact or analytic
solution and so it is necessary to calculate approximate solutions. The theory and
the numerical methods which are used to make these approximations are part of a
branch of mathematics called numerical analysis. An evaluation of a numerical
method needs to take into account its efficiency, accuracy, what type of problems it
can solve and its limitations.
2.1 Piecewise polynomial interpolation
Polynomials are useful for the purposes of approximation because they can be
differentiated and integrated easily using basic arithmetic operations. A
polynomial of order n is defined as:
p(x) = a1 + a2x+ · · ·+ anxn−1 =
n∑
j=1
ajxj−1 (2.1)
and the set of all polynomials of order n forms a linear space denoted as Π<n.
Consider an arbitrary function g with a set of n distinct points τi, i = 1, . . . , n on
an interval [a . . b] and the values of g are known at these points. Then there is a
unique polynomial p ∈ Π<n which satisfies the data at all the points. The
polynomial p can therefore be considered to be an approximation to g and
approximates it over the whole interval. The polynomial can be written in
Lagrange form [2] I equations (2), (4) or in Newton form [2] I (7). The Newton
P0114977 8 Mark Cannon

2.1 Piecewise polynomial interpolation 9
form is particularly convenient since it is possible to use divided differences to
build up the polynomial by adding the data sites one at a time.
One important property is Leibniz’ formula which states that if f(x) = g(x)h(x)
for all x then:
[τi, . . . , τi+k]f =i+k∑
r=i
([τi, . . . , τr]g)([τr, . . . , τi+k]h) (2.2)
where the kth divided difference of g at the sites τi, . . . , τi+k is denoted by
[τi, . . . , τi+k]g and a proof is in [2] chapter I.
If the sites τi are not distinct then there is a repeated interpolation called
osculatory interpolation where there is higher order contact between p and g. This
means that for every site ζ that occurs m times then the m-fold derivatives at ζ
must agree, i.e.
pi−1(ζ) = gi−1(ζ) for i = 1, . . . ,m (2.3)
Another important result in which the sites are not necessarily ordered or distinct
is the Osculatory Interpolation Theorem [2] I (14). This gives both the Newton
form for the unique polynomial and also approximates g(x) with an error function
e(x) = g(x)p(x).
When there are repeated sites then in computations it is possible to calculate the
divided difference from g if it has k continuous derivatives. For g ∈ C(k), then the
kth divided difference is:
[τi, . . . , τi+k]g =g(i)(τi)
k!if τi = · · · = τi+k (2.4)
One of the disadvantages of polynomial approximation is Runge’s phenomenon
where there are oscillations near the edge of an interval, especially when using
polynomials of a high order. The interpolation error can actually increase as the
order increases instead of decreasing as might be expected. This problem is
P0114977 Mark Cannon

2.1 Piecewise polynomial interpolation 10
especially bad if equally spaced (or uniform) interpolation sites are used. The
sensitivity of the approximation to the choice of the interpolation sites is a key
limitation of polynomial approximation. It is possible to improve the
approximation by using the zeros of orthogonal polynomials. Orthogonal
polynomials are classes of polynomials defined over an interval [a . . b] such that
any two non-equal polynomials satisfy the orthogonality condition defined as an
inner product:
(φi, φj) = 0, i 6= j (2.5)
The orthogonality condition for many families can be defined using a weighting
function w(x) as follows:
∫ b
a
w(x)φi(x)φj(x) dx = 0 (2.6)
An equivalent definition is to define a sequence of polynomials satisfying a
three-term recurrence:
P−1(x) := 0, P0(x) := 1,
Pi+1(x) := Ai(x−Bi)Pi(x)− CiPi−1(x), i = 0, 1, 2, . . . (2.7)
for certain coefficients Ai, Bi, Ci. For example the Chebyshev polynomials are
defined on [−1 . .1] and use the weighting function w(x) = (1− x2)−1/2.
Equivalently they are defined using the recurrence relation above with the
coefficients:
A0 = 1, B0 = 0
Aj = 2, Bj = 0, Cj = 1, j = 1, 2, 3, . . .
If the zeros of the Chebyshev polynomials are used as interpolation sites then it
can be shown that this interpolation is nearly optimal [2] I (15). However there are
still some functions which are not well approximated. For example the error may
P0114977 Mark Cannon

2.1 Piecewise polynomial interpolation 11
now decrease as n is increased but this may occur far too slowly in order to achieve
the accuracy required.
Approximation theory can be used to determine the rate at which the error goes to
zero for different classes of functions g. The classification used is based on the
number of continuous derivatives r that a function has. The modulus of continuity
of g in a strip of width h is w(g;h) where:
w(g;h) := sup{ |g(x)− g(y)| : x, y ∈ [a . . b], |x− y| ≤ h } (2.8)
and the value of the rth derivative of w(g;h) can be used to put a bound on the
error.
If w(g;h) ≤ Kh for some constant K and all (positive) h then g is said to be
Lipschitz continuous. It is in effect a smoothness condition which is stronger than
normal continuity and so limits how fast a function can change. Piecewise
continuously differentiable functions in C[a . . b] belong to this class of functions
and they are a much larger class than the continuously differentiable functions. If
g has only r derivatives then there is a limit on how well g can be approximated by
polynomials as shown by Jackson’s Theorem [2] II (22). The error decreases with
the order n and increases with the size of the interval [a . . b]. So one way of
increasing the accuracy is to partition [a . . b] into smaller intervals, that is to use
piecewise polynomials. The other way is to increase n although the use of
polynomials of order 20 or higher is problematic and it is necessary to switch the
representation of the polynomials to a better conditioned form such as the
Chebyshev form. Also the high order problem is far more difficult to solve whereas
solving using a large number of lower order pieces is simply solving an easier
problem many times. Hence it is more efficient to use piecewise polynomials for
approximation than to increase n. The use of piecewise polynomials also reduces
the global dependence on local properties. If the function is badly behaved
anywhere in an interval then the approximation is poor everywhere. This
disadvantage can be limited by using many intervals.
P0114977 Mark Cannon

2.2 B-splines 12
A convenient way of representing piecewise polynomials which is suitable for
computation is called piecewise polynomial form. It is worth specifying this in
detail since some of the definitions and notation will be used later when discussing
B-splines and collocation. The space of piecewise polynomials of degree less than k
is Π<k,ξ with l + 1 breakpoints ξ = (ξ1, . . . , ξl+1), with ξ1 = a and ξl+1 = b. The
ppform definition of f is then given by [2] II (6) and consists of:
• the integers k and l giving the order and number of pieces
• the strictly increasing sequence of breakpoints ξ1, . . . , ξl+1
• the k× l matrix C containing the values of f and its right derivatives at each
of the breakpoints. Using the array C it is possible to represent the function
f using Taylor polynomials.
For the piecewise polynomial to be smooth there must be continuity conditions at
the breakpoints. If there are νi continuity conditions at the breakpoint ξi then the
vector ν = (ν2, . . . , νl) specifies the number of continuity conditions at each of the
internal breakpoints. The space of all piecewise polynomials of degree less than k
with breakpoints and continuity conditions as defined above is Π<k,ξ,ν
2.2 B-splines
Having defined the subspace Π<k,ξ,ν in the previous section, the next step is to
obtain a basis which is required to construct a particular function f in that
subspace. One possibility is to use the truncated power basis. This basis uses a
double sequence ψij which is defined as follows:
ψij :=
(x− ξ1)j/j!, i = 1;
(x− ξi)j+/j!, i = 2, . . . , l, for j = 0, . . . , k − 1
The truncated power function f(x) := (x− ξ)r+ is a piecewise polynomial of order
P0114977 Mark Cannon

2.2 B-splines 13
r + 1. The subscript ‘+’ notation indicates that the function is truncated so that
(x− t)+ is zero to the left of t as shown in figure 2.1. Hence f is always positive.
Note that the power functions are continuous except for the case r = 0 when there
is a jump at ξ.
t
x
f(x)=(x-t)+
Figure 2.1: The function f(x)
Since ψij is a basis then every function in the space Π<k,ξ,ν can be expressed as a
linear combination of the basis sequence in exactly one way. Piecewise polynomials
like this which are sufficiently smooth at the places where the polynomials pieces
connect are called splines. The points where the pieces connect are called knots.
Note that D(· − ξ)r+ = r(· − ξ)r−1+ and so each (· − ξ)r+ has r − 1 continuous
derivatives, with a jump in the rth derivative.
However the truncated power basis suffers from some serious problems. There is a
possible bad ‘condition’ caused when non-uniform ξ leads to some of the basis
functions to become nearly linearly dependent on others. This then means that the
linear system which has to be solved is also badly conditioned. The problem is
that the power functions grow rapidly but the function that is being approximated
may not. Hence the situation can arise where large terms are added or subtracted
leading to rounding errors. The way to avoid this is to use basis splines or
B-splines which are defined as scaled kth divided differences of the truncated
power functions and because these B-spline values are always small then the
problem of rounding errors does not occur.
The jth normalised B-spline of order k, using the non-decreasing knot sequence
P0114977 Mark Cannon

2.2 B-splines 14
t = (tj) is denoted by Bj,k,t and is defined as:
Bj,k,t := (tj+k − tj)[tj, . . . , tj+k](· − x)k−1+ , all x ∈ R (2.9)
The dot placeholder notation is used to indicate that the kth divided difference of
the function (t− x)k−1+ , which has two variables t and x, is calculated by fixing x
and treating it as a function of t only.
The B-splines can also be calculated from a recurrence relation and this is much
more convenient to use than (2.9) since it can be implemented far more easily and
efficiently in computer code. The relation is derived using Leibniz’ formula (2.2)
from section 2.1 and a proof is given in [2] IX. The recurrence relation is:
For k = 1, Bj,1(x) =
1, if tj ≤ x < tj+1
0, otherwise
For k > 1, Bj,k = ωjkBj,k−1 + (1− ωj+1,k)Bj+1,k−1 ,
where, ωjk :=x− tj
tj+k−1 − tj
The B-splines have many useful properties which make them suitable as a basis for
piecewise polynomials. They are described as having local or small support which
means that they are non-zero only on the interval [tj . . tj+k]. Moreover they are
positive on that interval. They provide a local partition of unity which is also
called the normalisation condition:
∑
j
Bj,k = 1 on Ik,t
These properties are the reason that the B-spline values will always remain small.
The actual smoothness of Bjk depends on the number of times which the break ξi
appears in the knot sequence.
The spline space $k,t is defined as all possible functions which are linear
combinations of B-splines of order k for the knot sequence t. The Curry-Shoenberg
P0114977 Mark Cannon

2.3 B-spline interpolation 15
Theorem says that it is equal to the space of all piecewise polynomials for a
sequence of continuity conditions:
$k,t = Π<k,ξ,ν on Ik,t
However this is true only on the ‘basic interval’ Ik,t associated with the knot
sequence t. A proof of the theorem is in [2] IX.
The knot sequence t can be chosen by translating the desired smoothness at a
break, specified by ν into a corresponding number of knots at that site. Fewer
knots means more continuity conditions according to the equation:
Number of continuity conditions at ξ + number of knots at ξ = k (2.10)
The B-spline form or B-form of a piecewise polynomial is equivalent to the ppform
of f in section 2.1 and is an efficient way of representing the B-spline in computer
code. It consists of the order k; the number of linear parameters n where
n = kl −∑
i νi; the knot sequence vector t and the coefficient vector α for the
B-spline basis where:
f(x) =n
∑
i=1
αiBi(x) (2.11)
Another useful property of B-splines is that they can be differentiated easily by
differencing the B-spline coefficients. The first derivative of a B-spline of order k is
of order k − 1.
2.3 B-spline interpolation
B-splines can be used to interpolate a function g and this is accomplished by
setting up a set of linear equations. The aim is to make the spline match g at n
data sites using a basis of dimension n. Equation (2.10) shows that the maximum
P0114977 Mark Cannon

2.3 B-spline interpolation 16
number of repeated knots is k, in which case there are no continuity conditions at
that site. Hence the non-decreasing knot sequence t = (ti)n+k1 has the condition
ti < ti+k for all i. (Bi)n1 is the corresponding linearly independent sequence of
B-splines of order k. The dimension of the basis is therefore n. The unique data
sites are a sequence which is strictly increasing τ = (τi)n1 . Then a for a given
function g the spline f :=∑n
1 αjBj from (2.11) agrees with g at τ if and only if:
n∑
j=1
αjBj(τi) = g(τi), i = 1, . . . n (2.12)
and this is the linear system where the vector α = (αi)n1 consists of the n
unknowns. The coefficient matrix (Bj(τi)) is called the spline collocation matrix
and if this matrix is invertible then the linear system can be solved.
The Schoenberg-Whitney Theorem [2] XIII states that (Bj(τi)) is invertible
provided the knot sequence t is such that:
• there are fewer than k + 1 repetitions in t for any breakpoint ξi
• where an interpolation site τj coincides with a breakpoint ξi, there are fewer
than k repetitions in t
• the diagonal elements of the associated coefficient matrix are non-zero, so
Bi(τi) 6= 0
There are some further properties of the spline collocation matrix which make it
easier to solve using computer code. The matrix is banded as a result of the fact
that the B-spline is non-zero only for x ∈ [ti . . ti+k] and τi is in this interval. So
matrix has at most k non-zero elements on each row and these are all grouped
around the diagonal. The matrix is said to have a low bandwidth (of k) and sparse
matrices like this lead to much more efficient computation.
Another property is the total positivity of the spline collocation matrix. This
means that all its minors i.e. all possible determinants are greater than or equal to
P0114977 Mark Cannon

2.4 Collocation 17
zero. This is significant because it means that the linear system can be solved by
Gauss elimination without pivoting which greatly reduces the number of
operations needed to solve the system.
2.4 Collocation
A collocation method can be used to solve partial differential equations,
ordinary differential equations and integral equations. It is the method as applied
to ordinary differential equations that is of interest here. Rather than matching
values to g, the aim is to match the differential equation at the collocation sites.
This has to be done implicitly since the solution of the differential equation is not
known; it is this solution that is being sought. Only second order equations with
two boundary conditions will be considered here.
The order of the differential equation is m=2 and this is also equal to the number
of boundary conditions, also known as side conditions. The first step is to choose
the number of polynomial pieces l on the interval [a . . b] with the breakpoints
ξ1 = a < ξ2 < · · · < ξl+1 = b.
Then select k collocation points within each subinterval ξi . . ξi+1. The distribution
of the points is important and in this particular instance they are chosen so that
they are the zeros of Legendre polynomial of order k. The reason for this choice is
discussed further in section 2.5.1. The order of the piecewise polynomial
approximation is k +m and the dimension of the spline is n = kl +m.
Then the knot sequence has to be generated from the break sequence. This is done
so that there are m− 1 continuous derivatives at the break. This means that there
are k knots at each break apart from at the end points where there are k +m. It is
now possible to generate the splines Bj,k+m,t and their derivatives.
The unknown function is expressed as a linear combination of the B-spline basis as
in (1.11). This can be differentiated and substituted into the differential equation
P0114977 Mark Cannon

2.5 Collocation at Gaussian points 18
(or a linearised version of the equation) and together with the side conditions this
gives an almost block diagonal system. The number of blocks will be equal to the
number of intervals l. The number of columns in the ith block correspond to the
k +m B-splines that support this interval and the number of rows in the block are
made up of the k collocation equations in the ith interval plus side conditions (if
any) in that interval. This almost block diagonal linear system can be efficiently
solved by computer code by using Gauss elimination with partial pivoting.
This above describes one iteration of the collocation method. If the differential
equation is linear then the method has finished. For non-linear differential
equations there is a procedure to linearise them and then use iteration based on
Newton’s method to get a solution. The linearisation procedure is described in
section 4.1 and the theory of why it is efficient is considered in section 2.5.
2.5 Collocation at Gaussian points
In this section some theorems and results from the paper “Collocation at Gaussian
points” by de Boor and Swartz are described [1]. The two most important
theorems from this paper are Theorem 3.1 which describes how non-linear
problems can be solved efficiently by using Newton’s method and Theorem 4.1
which shows that Gaussian points are a good choice for the collocation points. The
approximations are piecewise polynomial functions of order m+ k with m− 1
continuous derivatives. The problem that is being considered in the paper is to
find the solution x ∈ C(m)[a, b], m > 0 of an mth order nonlinear ordinary
differential with m linear side conditions where:
Dmx = Fx; βi = ci, i = 1, . . . ,m (2.13)
using the abbreviation
(Fx)(t) = F (t, x(t), . . . , (Dm−1x(t)), where F = F (t, z0, . . . , zm−1) (2.14)
P0114977 Mark Cannon

2.5 Collocation at Gaussian points 19
2.5.1 Theorem 3.1
In this section there is a description of the assumptions and conditions of Theorem
3.1 which is on page 595 of the paper [1] and a discussion of the significance of its
consequences. It is stated at the start of the theorem to let x ∈ C(m+n)[a, b], n ≥ 0
be a solution of (2.13). The first hypothesis is that F (t, z0, . . . , zm−1) is sufficiently
smooth near x. This means the function F which is a function of the coefficients
and derivatives of order lower than m must be sufficiently smooth not only at the
solution x but close to it as well. As an example in the paper it is assumed that
F ∈ C2(N ), where N is in some ǫ-neighbourhood of C. To put this into some
context for the differential equation that is investigated in this dissertation it is
shown in section 4.1 that (using the slightly different notation defined here):
F (t; z0, z1) = −2
tz1 − zn0
It is also shown that although there is a singular point, that the terms are well
defined as the singular point is approached. Hence for this problem it does seem
that this condition can be assumed true. The second hypothesis is that the linear
problem associated with x is uniquely solvable and possesses a Green’s function
G(t, u). A Green’s function is a fundamental solution to an inhomogeneous
differential equation with boundary conditions. It is effectively a building block
that can be used to construct many other useful solutions. Regarding the
Lane-Emden equation which is the focus of this investigation it is shown in section
3.2.1 that there are some analytic solutions of the Lane-Emden equation and they
are unique and these solutions have a similar form. Hence it seems reasonable to
assume that the linearised form for the Lane-Emden equation satisfies this
condition.
The first part (a) of the theorem states that there is no other approximate solution
x near x. In other words if the iteration starts close to x then it should converge
on that solution and on no other.
The second part (b) is that the collocation equation has a solution in the
P0114977 Mark Cannon

2.5 Collocation at Gaussian points 20
neighbourhood of x and that it is unique.
The third part (c) states that Newton’s method for approximately solving the
collocation equation converges quadratically in some neighbourhood of x∆, the
collocation approximation (i.e. the solution to the collocation equations). This is
highly significant since it means that if the iteration converges on a solution at all
then it should do so rapidly.
The fourth part (d) gives an error estimate for x∆:
||Di(x− x∆)||∞ ≤ const.|∆|min(n,k), i = 0, . . . ,m
Hence the infinity norm of the error and the m derivatives of the error is bounded.
Note that |∆| is the size of the piecewise interval. Hence a result of this is that the
error can be reduced by reducing the interval, i.e. by increasing the number of the
partitions of the piecewise polynomial. It can also be decreased by increasing k,
the number of the collocation points.
In part (e) it is stated that even more significantly:
Di(x− x∆) = Di(x−Rx) +O(|∆|2min(n,k)), i = 0, . . . ,m
This is indeed significant since it is saying that the difference between the solution
to the non-linearised equation and the solution to the linearised equation is
bounded in a similar fashion to part (d). This is important since just because the
solution to the linearised equation converges, it does not necessarily mean that this
solution is anywhere near the solution of the actual differential equation. This
theorem shows that in fact it is near and gives error estimates for their difference
and a strategy for improving the accuracy of the approximation.
P0114977 Mark Cannon

2.5 Collocation at Gaussian points 21
2.5.2 Theorem 4.1
In this section there is a description of the assumptions and conditions of Theorem
4.1 which is on page 600 of the paper [1] and a discussion of the significance of its
consequences. It is assumed that both hypotheses (i) and (ii) of Theorem 3.1 hold.
It is also assumed that the coefficients of the differential operator are smooth
enough.
Additionally it is assumed that condition (4.7) from [1] holds. This condition is a
further smoothness condition and is that the moduli of the derivatives of the
Green’s functions of the linearised equation are all less than a constant K. Now
assume that the k collocation points in the standard interval [−1 . . 1] are chosen so
that:
∫ 1
−1
q(u)k∏
i=1
(u− ρi) du = 0
for every q ∈ Π<n. This means that the collocation points are the zeros of the
Legendre polynomial of order k, also known as Gaussian points.
Then the solution obtained by collocation at the breakpoints has a bound on the
error as follows:
|Dj(x− x∆)(t)| ≤ c1|∆|k+n, i = 0, . . . ,m− 1
Also there is a bound on the global error as follows:
||Dj(x− x∆)(t)||∞ ≤ c1|∆|k+min(n,m−i), i = 0, . . . ,m
Now Dif is piecewise polynomial and is of order m+ k− i and so the global bound
shows that the approximation is of optimal order if n ≥ m− i. In other words the
global error of the approximation is of the same order as the optimal one.
Note that by using Gaussian points as the collocation points allows the choice
P0114977 Mark Cannon

2.5 Collocation at Gaussian points 22
n = k and then the error bound for the global error is O(|∆|m+k) and the error
bound at the breakpoints is O(|∆|2k).
Now 2k > m+ k and hence the approximation at the breaks is of better than
optimal order. This is a phenomenon known as superconvergence and means that
the solution will be much more accurate at the breakpoints than at the rest of the
solution. This is shown clearly in the results for the linear problem in [1] Table I.
For example, for uniform collocation points and N = 10 (where N is the order) the
global error in the solution is 9× 10−8 and the maximum error at the breakpoints
is also 9× 10−8. However for the Gaussian points the global error is 3× 10−10 and
the maximum error at the breakpoints is 8× 10−13. The superconvergence leads to
a far lower error at the breakpoints than the global error for Gaussian points. In
addition, the overall solution is much better for Gaussian points than for uniform
points; the global error is orders of magnitude lower. This result is seen for other
values of N and also in the errors for the first and second derivative.
The rate of convergence to the solution as N is increased can also be seen in the
table. This is shown in the table as a multiplying factor showing how much better
the accuracy is for each increase in N . Away from the breakpoints the rate is the
same for Gaussian points as for other schemes. However at the breaks the rate
increases significantly.
2.5.3 Finite Element Method
The Finite Element Method is a discretization method and a description can be
found in [5]. It has been used to solve boundary value problems that are solutions
to partial differential equations. The domain is split into a number of subdomains
and the solution of the partial differential equation is approximated by a
polynomial function on each element. The polynomials are then pieced together
with an appropriate degree of smoothness over the whole domain. An integral of
the inner product of the residual and weight functions is constructed and the
product is forced to zero by setting the integral to zero. There is analogy to this
P0114977 Mark Cannon

2.5 Collocation at Gaussian points 23
process in collocation since by choosing the Gaussian zeros as the collocation
points the error function q is made small by making it orthogonal. However in this
case the weight function is 1. Using more collocation points forces the product
closer and closer to zero and so the solution improves.
P0114977 Mark Cannon

Chapter 3
Description of problem
The problem which is investigated is the solution of the Lane-Emden equation.
This is a dimensionless form of Poisson’s equation and has been used historically
in the field of astrophysics as a simple model of a star. It describes the behaviour
of polytropic fluids such as the plasma in a star where the pressure and density are
related by a power equation and where the fluid is also in hydrostatic equilibrium.
A solution to the equation is called a polytrope. The Lane-Emden equation is a
second order ordinary differential equation and its solution describes how the
density (relative to the central density) varies as a function of the dimensionless
radius.
The Lane-Emden equation has analytic solutions for certain values of the power n
in the power law equation and these values are used to investigate the accuracy of
the numerical solution obtained by collocation. The solution is then obtained for a
value of n for which there is no analytic solution and which is a model of our own
sun. The key parameters obtained are the zero of the solution, which corresponds
to the boundary of the star (where the density goes to zero) and also the derivative
at that zero.
These parameters are then used together with some known physical parameters of
the sun to estimate three properties at the core of the sun: the pressure, the
density and the temperature. These values are then compared to the values
obtained from the modern Standard Solar Model.
P0114977 24 Mark Cannon

3.1 Derivation of the Lane-Emden equation 25
3.1 Derivation of the Lane-Emden equation
Historically the Lane-Emden equation is of significance. It was first described in
1869 by J. Homer Lane who used it to calculate the temperature and density at the
surface of the sun [8]. A. Ritter also published many papers independently during
the period 1878-1889 [10] and it has been suggested that it would have been more
appropriate to call the equation the Lane-Ritter equation. Emden later wrote a
famous book on the theory of stellar structure called “Gaskugeln” (“Gas Spheres”)
which was published in 1907 [9]. In it he systemized a great deal of earlier work
and also presented a good proportion of new results and accurate tables.
The derivation of the Lane-Emden equation here is based on (but not identical to)
that given in Chandrasekhar’s book “An Introduction to the Study of Stellar
Structure”, Chapter IV [6]. The book was originally published in 1939 but the
reference here is to a corrected republication in 1958. The starting point is an
assumption that the pressure P and density ρ in a star are related by a power
equation:
P = Kργ, where K and γ are constants and γ = (n+ 1)/n (3.1)
It is assumed that this relationship, including the value of the constants, holds
throughout the star. Such systems which are in equilibrium are known as complete
polytropes. The constant γ is the adiabatic index and it characterises the
behaviour of the specific heat of a gas. The quantity n is called the polytropic
index. The next assumption is that the star is in gravitational (or hydrostatic)
equilibrium. The equation is derived using Newton’s Law of gravitation and is:
dP
dr= −ρ(r)GM(r)
r2(3.2)
where M(r) is the mass inside radius r and G is the constant of gravitation.
Since there are three unknowns, M , P and ρ then a third equation is needed to
P0114977 Mark Cannon

3.1 Derivation of the Lane-Emden equation 26
give a solution. This is the equation of mass continuity:
dM
dr= 4πr2ρ (3.3)
So, solving for M in (3.2) gives:
M(r) =r2
ρG
dP
dr⇒ dM
dr= − 1
G
d
dr
(
r2
ρ
dP
dr
)
(3.4)
and substituting for dM/dr into (3.3) and rearranging gives:
1
r2d
dr
(
r2
ρ
dP
dr
)
= −4πGρ (3.5)
From (3.1):
dP
dr= Kγργ−1dρ
dr(3.6)
and substituting this into (3.5) gives:
1
r2d
dr
(
r2
ρKγργ−1dρ
dr
)
= −4πGρ (3.7)
Now define ρ ≡ λθn, γ ≡ (n+ 1)/n, substitute into (3.7) and rearrange:
[
(n+ 1)
4πGKλ
1−n
n
]
1
r2d
dr
(
r2dθ
dr
)
= −θn (3.8)
Then introduce the dimensionless variable ξ, which is defined by:
ξ =r
α, where α =
[
(n+ 1)
4πGKλ
1−n
n
]1/2
(3.9)
Substituting into (3.8) and rearranging gives the usual form of the Lane-Emden
equation:
1
ξ2d
dξ
(
ξ2dθ
dξ
)
+ θn = 0 (3.10)
P0114977 Mark Cannon

3.2 Discussion of the Lane-Emden equation 27
This is a second order ordinary differential equation, which means that it requires
two boundary conditions in order to be well-defined. We can choose λ in ρ ≡ λθn
at ξ = 0 to be equal to the central density of the star ρc. We must then seek a
solution of (3.10) which takes the value unity at the origin. Hence θ(0) = 1 is the
first boundary condition. Now there is no mass inside radius 0 and so from the
equation of hydrostatic equilibrium (3.2), dP/dr = 0. Hence, also, dθ/dξ = 0 at
ξ = 0 and so the second boundary condition is θ′(0) = 0. Differentiating out
equation (3.10) gives the second order differential equation which has to be solved:
d2θ
dξ2+
2
ξ
dθ
dξ+ θn = 0, with θ(0) = 1, θ′(0) = 0 (3.11)
3.2 Discussion of the Lane-Emden equation
Note that there are analytic solutions for values of n equal to 0, 1 and 5. Varying
n corresponds to varying the type of reactions that are occurring in the star
although only a limited range of values of n model actual stars.
For n = 0, the density of the solution as a function of radius is constant. This is
the solution for a constant density incompressible sphere which does not
correspond to any real star.
n = 0.5 to 1 corresponds to a neutron star
n = 1 to 1.5 approximates a fully convective star, i.e. a very cool late-type star
such as a M, L, or T dwarf. This includes red giants, brown dwarfs and giant
gaseous planets.
n = 3 is also known as the Eddington Approximation. It is useful as it corresponds
to a fully radiative star or main sequence star such as our own sun and also to
white dwarfs. There is no analytic solution for this value of n and it is the
numerical solution of this case that is the aim of the investigation.
n = 5 is the other value for which there is an analytic solution but it does not
P0114977 Mark Cannon

3.2 Discussion of the Lane-Emden equation 28
correspond to any real star structure since the zero is at infinity.
3.2.1 Analytic solutions
The details of the three analytic solutions which exist for the given boundary
conditions are in Chandrasekhar’s book, chapter IV [6] and are as follows:
For n = 0: θ0 = 1− 1
6ξ2, which has a zero at ξ1 =
√6 (3.12)
For n = 1: θ1 =sin(ξ)
ξ, which has a zero at ξ1 = π (3.13)
For n = 5: θ5 =1
√
1 + 13ξ2, which has a zero at infinity (3.14)
Note that the first zero is always described as ξ1 for all values of n. For the two
cases where there is a zero, the first derivative at these points are:
For n = 0: θ′(ξ1) = −√6
3(3.15)
For n = 1: θ′(ξ1) =cos(π)
π− sin(π)
π2(3.16)
All these solutions have been incorporated into the Maple code so that the
maximum error can be calculated both globally to give an estimate of ‖f − g‖∞and also the error in the approximations for the zero and the derivative at the zero.
3.2.2 A singular non-linear boundary problem
Note that in (3.11) the coefficient of θ′ is 2/ξ and this is singular at ξ = 0.
Symmetry and physical arguments above imply the boundary condition θ′(0) = 0.
This boundary condition means that the term (2/ξ)θ′(0) is well-defined as ξ
approaches 0. There is an important distinction between regular and irregular
singular points. The singular point at ξ = 0 is regular by definition if (ξ − ξ0)P (ξ)
P0114977 Mark Cannon

3.2 Discussion of the Lane-Emden equation 29
is bounded as ξ → ξ0. That is the defined expression must remain finite, where
P (ξ) is the coefficient of θ′ and ξ0 is the singular point. If this quantity does not
remain finite then the point is an irregular singular point. In this case ξ0 = 0 and
P (ξ) = 2/ξ and so:
(ξ − ξ0)P (ξ) = (ξ − 0)2
ξ= 2, which is finite (3.17)
Hence the singularity can be classed as a regular singular point. Another term for
a point like this is a non-essential singularity. Furthermore the singular point is on
the boundary and this can have an effect when attempting to find a solution. This
has to be taken into consideration when using alternative methods to collocation
and this is discussed further in section 5.1.
In addition the equation is non-linear due to the θn term, at least for n > 1. For
n = 0, 1 the equation simplifies to a linear differential equation.
Note also that having the two boundary conditions in (3.11) on the same boundary
(ξ = 0) makes this an initial value problem (in effect) and so more care needs to be
taken with the accuracy. Hence a determination of the accuracy is the aim of the
first part of the investigation. By getting numerical solutions for the cases
n = 0, 1, 5 and then comparing these with the analytic solutions it can be shown
whether the method of collocation provides accurate solutions or not. If it does
then more confidence can be placed in the solution of the case n = 3. A boundary
condition of this type is called a Cauchy boundary condition. It consists of a
Dirichlet and a Neumann boundary condition.
In conclusion the Lane-Emden equation is a singular non-linear boundary problem
where the regular singular point lies on the boundary. This should provide a stern
test for the collocation method.
P0114977 Mark Cannon

Chapter 4
Maple investigations
4.1 Linearisation of the Lane-Emden equation
The method used to linearise the differential equation is given by de Boor [2] in
chapter XV, equations (9), (10) and (11) and also in the course notes [3] in (11) on
page 24. The boundary-value problem:
(D2g)(x) = F (x; g(x), (Dg)(x)) (4.1)
is linearised by treating the function F as the function of two variables z1 and z2.
Newton’s method is applied, given an initial approximation f0(x) to g(x) and
(Df0)(x) to (Dg)(x). Then a Taylor approximation is used with z1 close to the
function fr(x) and z2 close to the function (Dfr)(x) giving the linearised equation:
(D2y)(x) = y(x)∂F
∂z1(x; fr(x), (Dfr)(x))
+ (Dy)(x)∂F
∂z2(x; fr(x), (Dfr)(x))
− fr(x)∂F
∂z1(x; fr(x), (Dfr)(x))
− (Dfr)(x)∂F
∂z2(x; fr(x), (Dfr)(x))
+ F (x; fr(x), (Dfr)(x)) (4.2)
After solving the equation there is a new solution y = fr+1(x). If fr+1 is
sufficiently close to fr and (Dfr+1) is sufficiently close to (Dfr) then stop.
Otherwise replace r by r + 1 in (4.2) and solve the equation again. A limit has to
P0114977 30 Mark Cannon

4.2 Description of the Maple code 31
be put on the number of iterations in case the method fails to converge.
Now, rearranging equation (3.11) and changing variables to be consistent with the
notation above gives:
g(x)′′ = −2
xg(x)′ − g(x)n = 0 (4.3)
Hence,
F (x; z1, z2) = −2
xz2 − zn1
So,∂F
∂z1= −nzn−1
1 and∂F
∂z2= −2
x
Now substitute into equation (4.2) and simplify giving:
g′′(x) +2
xg′(x) + n [v(x)]n−1 g(x) = (n− 1)[v(x)]n (4.4)
where v(x) is the value of g(x) obtained in the previous iteration. Now substitute
for the required values of n, giving:
For n = 0, g′′(x) +2
xg′(x) = −1 (4.5)
For n = 1, g′′(x) +2
xg′(x) + g(x) = 0 (4.6)
For n = 3, g′′(x) +2
xg′(x) + 3 [v(x)]2 g(x) = 2[v(x)]3 (4.7)
For n = 5, g′′(x) +2
xg′(x) + 5 [v(x)]4 g(x) = 4[v(x)]5 (4.8)
4.2 Description of the Maple code
The code used to solve the Lane-Emden problem is based on the Maple code in the
file M840Exercises.mws which was supplied with the course. The ‘Main
P0114977 Mark Cannon

4.2 Description of the Maple code 32
Procedures’ plus the ‘Chapter XV Main Example’ were copied and modified. The
procedures in Main Procedures are mostly the same as in M840Exercises.mws
except as described in this section. The two procedures colloc and difequ have
been modified and there are two new procedures and a new block of main code.
The code has been altered so that it can solve the Lane-Emden equation for a
general value of n, the polytropic index. Hence there is a new parameter passed
into colloc, n_int which is then stored as a global variable.
The purpose of the other changes are to accurately determine the zero of the
solution i.e. the value of ξ1 which gives θ(ξ1) = 0 and then to also calculate the
derivative at that zero. These two parameters are of particular significance and are
used later to calculate physical properties of the sun. The zero is first detected in a
new procedure plotApprox and then another new procedure findZero is used to
get a more accurate estimate by searching more finely and then using linear
interpolation.
As described in section 3.2.2 the problem is effectively an initial value problem
with the value θ and first derivative θ′ specified at the left hand boundary ξ = 0.
Therefore the right hand boundary for the purposes of the calculation has to be
chosen so that the zero will lie to the left of this value. By experiment a suitable
value for n = 0, 1, 3 was found to be 10.0 and so this was chosen for the second
parameter to the procedure colloc.
The modifications to difequ are fairly substantial and this procedure is listed in
Appendix A. The main changes are as follows:
• The variable gx is defined to contain the exact solution for n = 0, 1, 5 using
equations (3.12)-(3.14)
• Since both boundary conditions are at 0, then both side conditions must be
at zero.
• The values of v(x) and h(x) depend on the value of n and the general case
P0114977 Mark Cannon

4.2 Description of the Maple code 33
can be obtained from equation (4.4). This is used to set the values of v[1]
and v[4] in the code.
• The value of the side conditions are set according to (3.11).
There is a new procedure plotApprox which is called to post-process the results
obtained after calling colloc and this is also listed in Appendix A. Its main
functions are as follows:
• It plots a graph of the solution and in addition for n = 0, 1, 5 the exact
solution and the error function are also plotted on the same graph.
• The maximum error is recorded in the cases where an exact solution is known
• The zero of the function is detected by determining when the solution
changes sign and then the procedure findZero is called.
• The coordinates of the solution are stored for later use.
The procedure findZero is also in the Appendix:
• It searches between the two values found in plotApprox with a finer
resolution and then when the zero is detected it calculates its value using
linear interpolation.
• The value of the first derivative at the zero is also calculated using the
procedure ppvalu
• For x = 0 and 1 the exact values of the zero and first derivative are given in
(3.12)-(3.13) and (3.15)-(3.16) and are used to calculate the error in these
values.
The main code is as follows:
P0114977 Mark Cannon

4.3 Results of the investigation 34
• It calls colloc and plotApprox for n in the range 0 to 5. This prints out the
plots and the results obtained and the Maple output is listed in Appendix B.
• Then all the solutions for n=0 to 5 are plotted on one graph.
• Finally the central pressure, density and temperature are calculated using
the results for the zero and derivative obtained for n = 3.
4.3 Results of the investigation
4.3.1 Accuracy of the method
The results of the solutions for n = 0, 1, 5 are considered in this subsection. In
order to compare the results for different values of n it was decided to keep the
number of intervals fixed at 8. The order of the polynomials was then varied
between 5 and 10. For each of the three cases there is an analytic solution as
detailed in section 3.2.1 and hence the maximum error can be calculated which
gives an estimate for ‖f − g‖∞. In addition for the cases n = 0, 1 the exact value
of the zero of the solution is known and hence the accuracy of the linear
interpolation method can also be investigated.
The results are summarised in Tables 4.1-4.3 and in Figures 4.1-4.3. First consider
the results for n = 0 in Table 4.1. Note that increasing the order beyond 5 does
not improve either the maximum error or the estimate of the zero of the solution.
This implies that a limitation has been reached in the resolution of the method.
This is also indicated in Figure 4.1 where the error (shown in green) is not of the
expected shape.
Next consider the results for n = 1 in Table 4.2. Here, increasing the order results
in an improvement of the maximum error, the estimate of the zero ξ1 and also of
the estimate of the first derivative θ′(ξ1) at the zero. The solution is also shown in
Figure 4.2 where the error curve in green is of the expected form. Note that there
are multiple zeros for the case n = 1 but it is only the first zero which is of interest
P0114977 Mark Cannon

4.3 Results of the investigation 35
for stellar modelling.
Finally, consider the results for n = 5 in Table 4.3. There is no zero since it is at
infinity but it can be seen that the maximum error improves as the order of the
polynomials increases. However the accuracy for n = 5 is much less than for n = 1.
This is expected since n = 1 is a linear problem whereas for n = 5 it is a non-linear
problem in which the solution is obtained after 7 iterations of Newton’s method.
These results indicate that the method is reasonably accurate, for example for
n = 1 the error in the zero varies between 1.6× 10−5 for order 5 to 1.1× 10−11 for
order 10. This is certainly good enough for a stellar model which is only an
approximation in any case.
It is the solution for n = 3 that is being sought and assuming that the method is
as accurate for n = 3 as for n = 5 (which seems reasonable) then the results for
n = 5 and n = 1 can be used to select the required degree of accuracy for the zero
solution of n = 3. For example say the accuracy of the zero is required to 6
decimal places then referring to Table 4.2 then such accuracy is indicated for order
7 where the maximum error is 6.0× 10−8. Then referring to Table 4.3 it can be
seen that such a value of the maximum error can be expected for the non-linear
case when the order is 9.
Order Max error ξ1 (Zero) Error of ξ1 θ′(ξ1) Error of θ′(ξ1)5 2.00E-23 2.44948974278 -5.115E-13 -8.16496580928E-01 1.705E-136 3.00E-23 2.44948974278 -5.115E-13 -8.16496580928E-01 1.705E-137 2.30E-22 2.44948974278 -5.115E-13 -8.16496580928E-01 1.705E-138 2.20E-22 2.44948974278 -5.115E-13 -8.16496580928E-01 1.705E-139 1.00E-22 2.44948974278 -5.115E-13 -8.16496580928E-01 1.705E-1310 2.10E-22 2.44948974278 -5.115E-13 -8.16496580928E-01 1.705E-13
Table 4.1: Results for n = 0, 8 intervals
P0114977 Mark Cannon

4.3 Results of the investigation 36
Order Max error ξ1 (Zero) Error of ξ1 θ′(ξ1) Error of θ′(ξ1)5 4.176E-05 3.14157679305 -1.586E-05 -3.18221082925E-01 8.880E-056 2.323E-06 3.14159714976 4.496E-06 -3.18311437319E-01 -1.551E-067 6.045E-08 3.14159266219 8.596E-09 -3.18309720196E-01 1.660E-078 2.262E-09 3.14159265903 5.441E-09 -3.18309889446E-01 -3.262E-099 5.744E-11 3.14159265361 1.631E-11 -3.18309885994E-01 1.895E-1010 1.690E-12 3.14159265360 1.072E-11 -3.18309886187E-01 -3.297E-12
Table 4.2: Results for n = 1, 8 intervals
Order Max error5 8.029E-046 6.092E-057 9.102E-068 1.576E-069 6.323E-0810 3.498E-08
Table 4.3: Results for n = 5, 8 intervals
Figure 4.1: Lane-Emden solution for n = 0
P0114977 Mark Cannon

4.3 Results of the investigation 37
Figure 4.2: Lane-Emden solution for n = 1
Figure 4.3: Lane-Emden solution for n = 5
P0114977 Mark Cannon

4.3 Results of the investigation 38
4.3.2 Results for n = 3
Having investigated the accuracy of the method then the results for n = 3 are now
considered. See the estimates for the zero of the solution in Table 4.4. As the order
increases the value of the zero ξ1 converges towards 6.896849 (to six decimal
places). Note that this agrees with the value that is calculated in Chandrasekhar
[6] in Chapter IV Table 4 which is 6.89685. The value of the first derivative θ′(ξ1)
converges to 0.042429758 and this is also consistent with the value in [6].
A standard way to determine the “accuracy” of a numerical method applied to
determining an approximate solution to a differential equation is to progressively
double the number of computing points until successive approximations differ by
less than the required accuracy. The results in Table 4.4 illustrate how this
approach would work. If an accuracy of 6 decimal places is required then the order
of the polynomials required is 8 as indicated by the value 5.1× 10−7 in Table 4.4 in
the “difference” column. This required value of 8 is close to the value of 9 for the
order that was estimated in section 4.3.1.
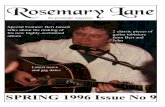
Since the method will solve the Lane-Emden equation for any given value of n it is
a fairly simple task to get the solutions for all values of n from 0 to 5 and plot
them on a single graph. The procedure to do this is included in the Appendix and
the resulting diagram is shown in Figure 4.5. This shows how increasing the value
of n affects the solution. As n increases the mass becomes gradually more centrally
condensed. This means that the mass is more concentrated towards the centre of
the star. For a value of n = 3 there is central part which is more dense and this
gradually gives way to a much less dense part near the boundary of the star with a
large tail. However for n = 1 the density falls rapidly near the boundary of the
star and so the density is more constant through the star and hence less centrally
condensed.
P0114977 Mark Cannon

4.3 Results of the investigation 39
Order ξ1 (Zero) Difference θ′(ξ1)5 6.89905355146 - -4.23799904310E-026 6.89681721997 -2.236E-03 -4.24307003795E-027 6.89684817352 3.095E-05 -4.24297439469E-028 6.89684867876 5.052E-07 -4.24297571413E-029 6.89684861744 -6.132E-08 -4.24297576318E-0210 6.89684861943 1.990E-09 -4.24297576036E-02
Table 4.4: Results for n = 3, 8 intervals
Figure 4.4: Lane-Emden solution for n = 3
P0114977 Mark Cannon

4.3 Results of the investigation 40
Figure 4.5: Lane-Emden solution for various values of n
P0114977 Mark Cannon

4.3 Results of the investigation 41
4.3.3 Application of the results to our sun
The solution for n=3 is a model of our own sun and can be used to estimate some
physical parameters. Using the Lane-Emden analysis and actual external
measurements of the sun then the value of some internal properties can be
estimated.
The pressure at the centre of a star Pc is given in Chandrasekhar [6] chapter IV,
equations (80) and (81). Combining these two gives:
Pc =1
4π(n+ 1)[θ′(ξ1)]2GM2
R4= 1.25× 1016 Nm−2 (4.9)
where the mass of the sun M = 1.9891× 1030 kg, the radius of the sun
R = 6.955× 108 m, the gravitational constant G = 6.67384× 10−11 m3 kg−1 s−2 and
θ′(ξ1) = −0.042429758 from Table 4.4.
Also the density at the centre of the star ρc is given in [6] chapter IV, equation
(78):
ρc = −[
ξ13
1
θ′(ξ1)
]
ρ, where ρ =M
43πR3
(ρ is the mean density)
= 7.65× 104 kgm−3 (4.10)
where all the constants are defined above and ξ1 = 6.896848619 from Table 4.4.
Finally there is an analysis in [6] chapter VI, equations (69)-(72), which estimates
the temperature at the centre of the sun Tc for n = 3. The result is:
Tc = 19.72× βµM
⊙R⊙
R× 106 Kelvin
= 1.18× 107 K (4.11)
where:
• β is a constant factor relating the radiation pressure pr and the pressure P as
P0114977 Mark Cannon

4.3 Results of the investigation 42
pr = (1− β)P and its value is calculated in [6] as β = 0.003;
• the mean molecular weight of the stellar plasma µ = 0.6;
• ⊙ is the relative solar mass (and hence cancels out with M);
• R⊙ is the relative solar radius (and hence cancels out with R)
It is interesting to compare the values calculated above with those based on the
modern Standard Solar Model (SSM) as shown in Table 4.5. The SSM values were
obtained from [7].
Pc (Nm−2) ρc (kgm−3) Tc (K)
Lane-Emden 1.25× 1016 7.65× 104 1.18× 107
SSM 2.34× 1016 15.2× 104 1.57× 107
Table 4.5: Comparison of Lane-Emden and Standard Solar Model
Hence the values calculated using the Lane-Emden model are in reasonable
agreement with the best available solar models even though nuclear processes and
details of energy transfer have not been considered.
These values can be put into context by comparing them with the values for the
centre of the earth. The density at the core of the sun is only 11 times that of the
earth’s centre (although in fact the mean density of the sun is actually less than
that of the earth). However the temperature is a factor of 2500 times greater and
the pressure is 65,000 times greater. This shows just how different the state of
matter is in the sun’s plasma. It should also be borne in mind that conditions at
the centre of the earth are very different its surface. For example the “standard
atmosphere” which represents normal pressure at sea level is defined to be
1.01325× 104 (Nm−2). Thus the pressure at the centre of the sun is greater than
atmospheric pressure on the earth by a factor of more than 2× 1012.
P0114977 Mark Cannon

Chapter 5
Conclusion
5.1 Summary and discussion of results
It has been shown that the method of collocation can indeed be used to solve an
initial value type problem with Cauchy boundary conditions with high accuracy.
The solutions obtained for the polytropic index n = 3 agree with the literature.
Collocation can also be used to solve at least some differential equations which
have a regular singular point even when that singularity is on the boundary. It
can also be used to efficiently solve non-linear problems.
It is true that in order to get very accurate results it was necessary to use many
intervals and high order polynomials, particularly for higher values of n. For
example if 2 intervals and order 5 polynomials are used for the case n = 5 then the
accuracy is greatly reduced and the maximum error is 5.8× 10−2 which is not very
good. However the overhead of using the extra intervals and higher order is not
too great because the problem still runs quickly even on a moderately specified
laptop computer. What is less clear is how the efficiency compares to other
methods of solving the Lane-Emden equation and how the accuracy compares.
One alternative method of solving the Lane-Emden equation consists of obtaining
two separate first order differential equations by introducing a new variable. These
equations can then be solved on a computer using any standard numerical
integration package. However, numerical integration suffers from the disadvantage
that errors accumulate as the solution gets further from the boundary at the initial
condition. Hence the accuracy will be worst at the right hand boundary where the
P0114977 43 Mark Cannon

5.2 Further areas of study 44
zero of the solution occurs. In other words the accuracy is worst at the very point
where we want to determine the zero and the derivative at the zero. On the other
hand collocation is trying to fit the curve globally and so the errors are spread out
over the interval and there is no reason why the maximum error would occur at
the right hand boundary. Intuitively it seems that the accuracy of collocation
might be greater although this would need to be verified.
There is also one further problem with numerical integration for this problem and
that is the regular singularity at the origin. The integration will fail if this
boundary is included. One possible solution is to start with a very small finite
value of ξ and apply the boundary conditions there. However the error introduced
leads to a large error in the solution when far from the boundary. The solution is
to use a power series expansion of θ about ξ = 0 and use the solution to the series
to determine the initial conditions at a small finite value of ξ.
5.2 Further areas of study
There are many further areas of study which could extend the investigations in
this dissertation. Some are improvements in the method itself and others are new
areas of investigation; some possibilities for both are described in the following
paragraphs.
Improve the procedure findZero
There is a more accurate and efficient way of calculating the zero of the solution
which would require only a modification of the procedure findZero. Rather than
sweeping across the whole of the interval in constant sized steps, detecting the zero
and then performing a linear interpolation it would be possible to home in on the
solution using an iterative method. The step size could be gradually reduced and
it would only be necessary to keep track of the sign of the last solution. In this
way it would be possible to specify the accuracy required and then stop when the
last two estimates agree to that number of decimal places. It appears that this
P0114977 Mark Cannon

5.2 Further areas of study 45
would converge to the solution fairly rapidly and so would be more efficient than
the current method.
Reduce the maximum error
Having obtained as accurate a value as possible for the zero then the problem
could be modified to be a two-point boundary problem. So the boundary
conditions would become θ(0) = 1 and θ(ξ1) = 0. This may well increase the
overall accuracy of the solution and lead to a lower value of the maximum error.
This theory could be tested for the cases n = 0 and n = 1 since there are analytic
solutions for these values of n.
Compare collocation against other methods
A useful extension would be to investigate the efficiency of collocation compared to
other methods, one of which is described above. This investigation could take the
form of an efficiency determination by calculating the run time that the computer
takes to solve the problem. The actual results obtained could also be compared
and at least for those cases where there are analytic solutions a comparison of
accuracy could be made. There are other solutions in the literature and these
methods could be investigated too.
Sensitivity to initial coefficient values
The sensitivity of the solution to the initial guess for the Newton iteration could
also be investigated. In other words how close do the initial values of the
coefficients of the piecewise polynomial representation have to be to the final
converged values in order that convergence takes place? For this problem analytic
solutions are available and these suggest what values should be chosen. However
for other problems the starting values of the coefficients might have to be guessed
or randomly chosen. As part of this investigation it would also be possible to see if
the number of iterations that are required for convergence varies with the initial
values of the coefficients.
Non-integer values of n
Some models for stars use non-integer values of the polytropic index n. For
P0114977 Mark Cannon

5.2 Further areas of study 46
example a neutron star is in the range n = 0.5 . . 1 and a value of n = 1.5 is a good
model for fully convective star cores such as a red giant and giant gaseous planets
like Jupiter. However when the Maple code was used to solve these problems the
code failed. The problem was that instead of returning real floating point values
for the solution, there were complex number values returned instead. It would be
interesting to see if the collocation method and its implementation can be
debugged, fixing these errors, so that correct solutions can be obtained for the
non-integer values. Note that these solutions do exist and numerical integration
gives these solutions and there are also examples of tables with such solutions in
[6].
The Chandrasekhar Limit
The study of a high density white dwarf with n = 3 could also be used to give an
indication of the Chandrasekhar Mass. This is the critical mass above which
electron degeneracy pressure in the star’s core is insufficient to balance the star’s
own gravitational self-attraction and it collapses into either a neutron star or a
black hole.
The Lane-Emden equation is not just of historical interest; it is still a topic of
active research today. For example see “The Lane-Emden equation revisited”
(2003) [11] and “Approximate Analytic and Numerical Solutions to Lane-Emden
Equation via Fuzzy Modeling Method” (2012) [12] among others and so its
numerical solution is still relevant.
P0114977 Mark Cannon

Appendix A
Maple Code
The altered Maple code used to solve the differential equation by collocation is
listed here. The starting point was the Maple code in the file M840Exercises.mws
which was supplied with the course. The ‘Main Procedures’ plus the ‘Chapter XV
Main Example’ were copied and modified. The procedures in Main Procedures are
mostly the same as in M840Exercises.mws except for the source code listed here.
###################################################################
# This function is similar to the one in M840Exercises.mws
# Any edits have a comment at the start of the change with text as follows:
# Change here - ......
difequ:=proc(mode::integer,xx,v_tmp)
local i,kmax,ncoef,npiece,\
ep1,ep2,error1,solutn,\
un,x,v,ii,jj,icnt,coef_approx1,nn,ni:
global bbreak_approx,coef_approx,l_approx,kpm_approx,\
m_side,iside_side,xside_side,\
itermx_other,k_other,rho_other,\
factor_difequ,s2ovep_difequ,gx,n_le:
v:=v_tmp:
npiece:=100: kmax:=20: ncoef:=npiece*kmax:
# integer mode, i,iside,itermx,k,kmax,kpm,l,m,ncoef,npiece:
# parameter (npiece:=100, kmax:=20, ncoef:=npiece*kmax):
# real v[kmax],xx, bbreak,coef,eps,ep1,ep2,error1,factor,rho,solutn:
# * ,s2ovep,un,x,xside:
# common/approx/ bbreak[npiece],coef[ncoef],l,kpm:
# common/side/ m,iside,xside[10]:
# common/other/ itermx,k,rho[kmax-1]:
# save eps,factor,s2ovep:
P0114977 47 Mark Cannon

A Maple Code 48
#c from * a practical guide to splines * by c. de boor :
#calls ppvalu(interv):
#c to be called by c o l l o c , p u t i t:
#c information about the differential equation is dispensed from here:
#c:
#c****** i n p u t ******:
#c mode an integer indicating the task to be performed.:
#c := 1 initialization:
#c := 2 evaluate de at xx:
#c := 3 specify the next side condition:
#c := 4 analyze the approximation:
#c xx a point at which information is wanted:
#c:
#c****** o u t p u t ******:
#c v depends on the mode . see comments below:
#c:
#c:
#c this sample of difequ is for the example in chapter xv. it is a:
#c nonlinear second order two point boundary value problem.:
#c:
nn:=convert(n_le, float):
# Change here - Analytic solutions exist for the cases n=0,1,5
# Define gx depending on the value of n (the polytropic index)
if n_le=0 then gx:=1.0-(x_loc)^2/6.0
elif n_le=1 then gx:=sin(x_loc)/x_loc
elif n_le=5 then gx:=1.0/sqrt(1.0+(x_loc)^2/3.0)
else gx:=0
end if:
if mode=1 then goto(10) end if:
if mode=2 then goto(20) end if:
if mode=3 then goto(30) end if:
if mode=4 then goto(40) end if:
#c initialize everything:
#c i.e. set the order m of the dif.equ., the nondecreasing sequence:
#c xside_side[i],i:=1,...,m, of points at which side cond.s are given and:
#c anything else necessary.:
10:
m_side := 2:
# Change here - both boundary conditions are at 0
xside_side[1] := 0.:
xside_side[2] := 0.:
#c *** print out heading:
printf(" ******************************************\n");
printf(" Lane-Emden problem n=%d", n_le):
printf("\n"):
P0114977 Mark Cannon

A Maple Code 49
# Change here - epsilon is not needed and has been deleted
l_approx := 1:
bbreak_approx[1] := 0.:
# Change here - all coefficents default to zero
for i from 1 to kpm_approx do:
coef_approx[i] := 0.:
end do:
# Overwrite the first coefficient
coef_approx[1] := 1.0:
itermx_other := 10:
return eval(v):
#c:
#c provide value of left side coef_approxf.s and right side at xx .:
#c specifically, at xx the dif.equ. reads:
#c v[m+1]d**m + v[m]d**(m-1) + ... + v[1]d**0 := v[m+2]:
#c in terms of the quantities v[i],i:=1,...,m+2, to be computed here.:
20:
v[3] := 1.0:
v[2] := 2.0/xx:
# coeff_approx is an array in ppvalu
icnt:=0:
for jj from 1 to l_approx do:
for ii from 1 to kpm_approx do:
icnt:=icnt+1:
coef_approx1[ii,jj]:=coef_approx[icnt]:
end do:
end do:
un := ppvalu(bbreak_approx,coef_approx1,l_approx,kpm_approx,xx,0):
# Change here - the values of v(x) and h(x) are obtained in the main text
# Note that n=0 and n=1 are the two linear cases. All other values of n
# are non-linear
if (n_le=0) then
v[1]:=0.0:
v[4]:=-1.0
elif (n_le=1) then
v[1]:=1.0:
v[4]:=0.0
else
v[1]:=nn*(un^(nn-1.0)):
v[4]:=(nn-1.0)*(un^nn)
end if:
return eval(v):
#c:
#c provide the m side conditions. these conditions are of the form:
#c v[m+1]d**m + v[m]d**(m-1) + ... + v[1]d**0 := v[m+2]:
P0114977 Mark Cannon

A Maple Code 50
#c in terms of the quantities v[i],i:=1,...,m+2, to be specified here.:
#c note that v[m+1] := 0 for customary side conditions.:
30:
v[m_side+1] := 0.:
if iside_side=1 then goto(31) end if:
if iside_side=2 then goto(32) end if:
if iside_side=3 then goto(39) end if:
31:
v[2] := 1.:
v[1] := 0.:
v[4] := 0.:
goto(38):
32:
v[2] := 0.:
v[1] := 1.:
v[4] := 1.:
38:
iside_side := iside_side + 1:
39:
return eval(v):
#c:
#c Mode 4 - analysis:
# Change here - don’t do any extra analysis
40:
printf("Don’t do anything"):
printf("\n"):
return eval(v):
end proc:
###################################################################
findZero:=proc(x_start, x_end, coef_approx1)
# This is a new procedure. It searches between x_start and x_end for
# the zero - i.e. where the function changes sign. It then calculates
# the ’x’ coordinate of the zero using linear interpolation.
# The value of the first derivative at this zero is also calculated.
# Also for x=0,1 the actual value of the zero and the derivative is
# known and so the error can be calculated
local ii, numPoints, dx, zeroPoint, x1, x2, y1, y2, firstDeriv, secondDeriv:
global bbreak_approx,l_approx,kpm_approx, n_le:
numPoints := 1001:
dx := (x_end - x_start)/(numPoints - 1):
x2 := x_start;
for ii from 1 to numPoints do:
P0114977 Mark Cannon

A Maple Code 51
x1:=x2:
x2:=x1+dx:
y1:=ppvalu(bbreak_approx, coef_approx1, l_approx, kpm_approx, x1, 0):
y2:=ppvalu(bbreak_approx, coef_approx1, l_approx, kpm_approx, x2, 0):
# Check if the zero has been found
if signum(y2) <> signum(y1) then
# Calculate the zero using linear interpolation
zeroPoint:=(x2*y1 - x1*y2)/(y1 - y2):
printf(" zero at %25.18e\n", zeroPoint);
# The zero is only known for n=0 and n=1 (n=5 is at infinity)
# so print out the error in the zero for these cases
if n_le=0 then printf(" zeroError = %23.16e\n", zeroPoint-sqrt(6.0));
elif n_le=1 then printf(" zeroError = %23.16e\n", zeroPoint-Pi);
end if:
firstDeriv:=ppvalu(bbreak_approx, coef_approx1, l_approx, kpm_approx, zeroPoint, 1):
printf(" 1st deriv at zero = %23.16e\n", firstDeriv);
# Similarly the first derivative at the zero is only known for n=0,1
# so print out the error in the derivative for these cases
if n_le=0 then printf(" derivError = %23.16e\n", firstDeriv + sqrt(6.0)/3.0);
elif n_le=1 then printf(" derivError = %23.16e\n", firstDeriv - cos(Pi)/Pi + sin(Pi)/Pi^2 );
end if:
end if:
end do:
end proc:
###################################################################
plotApprox:=proc(graphtitle, c)
local ii, jj, coef_approx1, icnt, gr1, numPoints, v1, v2,
v3, v4, xflt, dx, xylist, colLst, t1, p, maxError, absError,
zeroPoint, numGraphs, t7:
# The following parameters are required to plot the piecewise polynomial
global bbreak_approx,coef_approx,l_approx,kpm_approx,n_le,plist:
#calls splint, bsplpp, ppvalu:
#c****** i n p u t ******:
#c graphtitle...string to display as the graph title:
#c:
#c****** o u t p u t ******:
#c none:
P0114977 Mark Cannon

A Maple Code 52
icnt:=0:
maxError:=0.:
for jj from 1 to l_approx do:
for ii from 1 to kpm_approx do:
icnt:=icnt+1:
coef_approx1[ii,jj]:=coef_approx[icnt]:
end do:
end do:
# Only plot the exact graph and error for n=0,1,5
if n_le=0 or n_le=1 or n_le=5 then numGraphs:=3
else numGraphs:=1
end if:
# Plot the approximation, the exact value and the error on one diagram
gr1:=NULL:
numPoints:=1001:
v1:=Vector(numPoints):v2:=Vector(numPoints):
v3:=Vector(numPoints):v4:=Vector(numPoints):
xflt:=0.:
dx:=bbreak_approx[l_approx+1]/(numPoints-1):
for ii from 1 to numPoints do:
v1[ii]:= xflt:
v2[ii]:= ppvalu(bbreak_approx,coef_approx1,l_approx,kpm_approx,xflt,0):
v3[ii]:= evalf(subs(x_loc=xflt, gx)):
v4[ii]:= (v2[ii] - v3[ii])*c:
# Keep a record of the largest value of the error
absError:=abs(v2[ii] - v3[ii]):
if absError>maxError then maxError:=absError end if:
# Has the solution crossed the ’y’ axis?
if ii>1 then
if signum(v2[ii]) <> signum(v2[ii-1]) then
# If a zero has been detected then calculate an accurate value
findZero(v1[ii-1], v1[ii], coef_approx1):
end if:
end if:
xflt:=xflt+dx:
end do:
# Plot the solutions
xylist[1] := zip( (x,y) -> [x,y], v1, v2 ):
xylist[2] := zip( (x,y) -> [x,y], v1, v3 ):
xylist[3] := zip( (x,y) -> [x,y], v1, v4 ):
colLst:=[red,blue,green]:
for jj from 1 to numGraphs do:
p:=plot(xylist[jj],title=graphtitle,colour=colLst[jj],labels=["",theta(xi)]);
t7:=textplot([10.0,0.1,xi],’align’=’left’):
P0114977 Mark Cannon

A Maple Code 53
gr1:=gr1,display({p, t7}):
end do:
# Keep a copy of the co-ordinates in plist so that a plot
# can be done later for all the solutions n=0..5
plist[n_le+1]:=eval(xylist[1]):
printf(" maxError =%10.3e\n", maxError);
# Now display the graph
display(gr1);
end proc:
###################################################################
#c main program for Lane-Emden problem:
#c solution of a second order two point boundary value:
#c problem on (0., 10.) , by collocation with pp functions having:
#c pieces of varying order. Newton iteration is to be stopped:
#c when two iterates agree to 7 decimal places.:
colloc(0.,10.0,8,9,0,0.,0.00000001,0):
t1:=cat("Lane-Emden n=0, l=8, order=9"):
plotApprox(t1, 1.0*10^23);
colloc(0.,10.0,8,9,0,0.,0.00000001,1):
t1:=cat("Lane-Emden n=1, l=8, order=9"):
plotApprox(t1, 1.0*10^10);
colloc(0.,10.0,8,9,0,0.,0.00000001,2):
t1:=cat("Lane-Emden n=2, l=8, order=9"):
plotApprox(t1, 1.0);
colloc(0.,10.0,8,9,0,0.,0.00000001,3):
t1:=cat("Lane-Emden n=3, l=8, order=9"):
plotApprox(t1, 1.0);
colloc(0.,10.0,8,9,0,0.,0.00000001,4):
t1:=cat("Lane-Emden n=4, l=8, order=9"):
plotApprox(t1, 100000000000.0);
colloc(0.,10.0,8,9,0,0.,0.00000001,5):
t1:=cat("Lane-Emden n=5, l=8, order=9"):
plotApprox(t1, 1.0*10^7);
#########################################################
# Print out the solutions for n=1 to 5 on one graph
#
t1:=typeset("Solutions ", theta(xi)," to the Lane-Emden equation for various values of n"):
P0114977 Mark Cannon

A Maple Code 54
gr1:=NULL:
for jj from 1 to 6 do:
p:=plot(plist[jj],title=t1,labels=["",theta(xi)]):
gr1:=gr1,display(p):
end do:
t1:=textplot([2.39,-0.3,"n=0"],’align’=’below’):
t2:=textplot([4.3,-0.23,"n=1"],’align’=’below’):
t3:=textplot([6.1,-0.19,"n=2"],’align’=’below’):
t4:=textplot([5.5,0.089,"n=3"],’align’=’above’):
t5:=textplot([6.4,0.16,"n=4"],’align’=’above’):
t6:=textplot([7.3,0.23,"n=5"],’align’=’above’):
t7:=textplot([10.0,-0.2,xi],’align’=’left’):
display({gr1,t1,t2,t3,t4,t5,t6,t7},’view’=[0..10,-1..1]);
###################################################
# Calculate the pressure (Pc), density (pc) and
# temperature (Tc) at the core of the sun
#
printf("*********************************************\n"):
printf("* Calculate pressure, density and temperature\n"):
xi1:=6.896848617438180720:
theta1_d:=0.042429758:
n:=3:
M:=1.9891*10^(30):
R:=6.955*10^(8):
G:=6.67384*10^(-11):
Pc:=evalf(M^2*G/(4*Pi*R^4*(n+1)*(0.042429758)^2)):
pc:=evalf(xi1/(3*theta1_d)*M/((4/3*Pi*R^3))):
beta:=(1-0.003):
mu:=0.6:
Tc:=19.72*beta*mu*10^6:
printf("Pressure Pc = %12.5e\n", Pc):
printf("Density pc = %12.5e\n", pc):
printf("Temperature Tc = %12.5e\n", Tc):
P0114977 Mark Cannon

Appendix B
Maple Output
The output of the Maple code is shown here. Note that the plots of the graphshave been removed since these are already in the main text. Only the output forthe calculation of order 9 are here. To change the order, adjust the fourthparameter in the calls to colloc. and re-run the code. Note that the scaling factorused when plotting graph of the error has been set to an appropriate value fororder 9 and so may have to be adjusted when using a different order.
******************************************
Lane-Emden problem n=0
using 7 Gaussian collocation points
approximation from a space of splines of order 9 on 8 intervals of dimension 58.
converged after 1 of 10 allowed iterations
zero at 2.449489742782666561e+00
zeroError = -5.1153767537800000e-13
1st deriv at zero = -8.1649658092755552e-01
derivError = 1.7051255845990000e-13
maxError = 1.000e-22
******************************************
Lane-Emden problem n=1
using 7 Gaussian collocation points
approximation from a space of splines of order 9 on 8 intervals of dimension 58.
converged after 1 of 10 allowed iterations
zero at 3.141592653606104391e+00
zeroError = 1.6311152219315000e-11
1st deriv at zero = -3.1830988599432569e-01
derivError = 1.8946498215887540e-10
zero at 6.283185307180666380e+00
zeroError = 3.1415926535908731e+00
1st deriv at zero = 1.5915494311129818e-01
derivError = 4.7746482929508885e-01
zero at 9.424777960933622445e+00
zeroError = 6.2831853073438292e+00
1st deriv at zero = -1.0610329508958929e-01
P0114977 55 Mark Cannon

B Maple Output 56
derivError = 2.1220659109420138e-01
maxError = 5.744e-11
******************************************
Lane-Emden problem n=2
using 7 Gaussian collocation points
approximation from a space of splines of order 9 on 8 intervals of dimension 58.
converged after 7 of 10 allowed iterations
zero at 4.352874595858075083e+00
1st deriv at zero = -1.2724865080654556e-01
maxError = 1.109e+00
******************************************
Lane-Emden problem n=3
using 7 Gaussian collocation points
approximation from a space of splines of order 9 on 8 intervals of dimension 58.
converged after 7 of 10 allowed iterations
zero at 6.896848617438180720e+00
1st deriv at zero = -4.2429757631788092e-02
maxError = 1.000e+00
******************************************
Lane-Emden problem n=4
using 7 Gaussian collocation points
approximation from a space of splines of order 9 on 8 intervals of dimension 58.
converged after 7 of 10 allowed iterations
maxError = 1.000e+00
******************************************
Lane-Emden problem n=5
using 7 Gaussian collocation points
approximation from a space of splines of order 9 on 8 intervals of dimension 58.
converged after 7 of 10 allowed iterations
maxError = 6.323e-08
*********************************************
* Calculate pressure, density and temperature
Pressure Pc = 1.24707e+16
Density pc = 7.64778e+04
Temperature Tc = 1.17965e+07
P0114977 Mark Cannon

Bibliography
[1] Carl de Boor and Blair Swartz, Collocation at Gaussian points, SIAM Journalon Numerical Analysis, Vol.10, No. 4, September 1973, pp 582-606
[2] Carl de Boor, A Practical Guide to Splines, Revised Edition, Springer-Verlag,New York, USA, 2001
[3] The Open University, M840 option: Advances in Approximation Theory
Module Guide, 2013; available from the Maths MSc website.
[4] M. J. D. Powell, Approximation theory and methods, Cambridge UniversityPress, 1981
[5] U. Ascher, R. Mattheij, and R. Russell, Numerical Solution of Boundary
Value Problems for Ordinary Differential Equations, SIAM, Philadelphia,second edition, 1995
[6] S. Chandrasekhar, An Introduction to the Study of Stellar Structure, DoverPublications Inc., New York, USA, 1958
[7] J. Bahcall, Physics Letters B, 433, 1, 1998
[8] J. Homer Lane, On the Theoretical Temperature of the Sun under the
Hypothesis of a Gaseous Mass Maintaining Its Volume by Its Internal Heat
and Depending on the Laws of Gases Known to Terrestrial Experiment, Amer.J. Sci, 2nd ser., 50, 57-74 1869
[9] R. Emden, Gaskugeln, Teubner - Verlag, Leipzig and Berlin, 1907
[10] A. Ritter, Unterschungen uber die Hohe der Atmosphare und die Constitution
gasformiger Weltkoper, presented to the Wiedmann Annalen, 1878-1889
[11] Rafael Benguria, The Lane-Emden equation revisited, ContemporyMathematics, Vol.327, 2003, pp 11-19
[12] De-Gang Wang, Wen-Yan Song, Peng Shi, Hamid Reza Karimi, Approximate
Analytic and Numerical Solutions to Lane-Emden Equation via Fuzzy
Modeling Method, Mathematical Problems in Engineering Volume 2012,Article ID 259494
P0114977 57 Mark Cannon