Nonlinear phase correction for navigated diffusion imaging
11
Nonlinear Phase Correction for Navigated Diffusion Imaging Karla L. Miller * and John M. Pauly Motion during diffusion-weighted imaging (DWI) introduces phase errors that can cause significant artifacts in brain im- ages. One method of correcting these errors uses additional navigator data to measure the phase corruptions. Standard navigator methods correct for rigid-body motion but cannot correct for nonrigid deformations of the brain related to the cardiac cycle. This work derives a generalized reconstruction that corrects for nonrigid motion based on a least-squares formulation. Since this reconstruction has the disadvantage of being computationally expensive, an approximation is pre- sented, called a refocusing reconstruction. The refocusing re- construction is both efficient and straightforward. Each readout is multiplied in image space by the phase conjugate of the navigator image, and these rephased readouts are then summed. The conditions under which the refocusing recon- struction is sufficient are considered and methods to improve the quality of refocused images are discussed. In particular, synchronization of the acquisition to the cardiac cycle can provide data that is well-conditioned to the refocusing recon- struction without incurring the large time penalty traditionally associated with cardiac gating. These methods are applied to steady-state DWI, a promising pulse sequence that is particu- larly sensitive to motion-induced phase artifacts. The refocus- ing reconstruction is shown to significantly improve SS-DWI over standard rigid-body corrections. Magn Reson Med 50: 343–353, 2003. © 2003 Wiley-Liss, Inc. Key words: diffusion MRI; motion correction; artifact reduction; navigator; reconstruction Diffusion-weighted imaging (DWI) is a powerful tool for probing tissue microstructure that uses large bipolar gra- dient pairs to impart phase to moving particles. Diffusing water spins within a voxel experience phase dispersion, causing signal attenuation that is dependent on the amount of diffusion. This attenuation results in diffusion contrast, which has been shown to be useful in brain imaging for detecting tissue disease states, as well as re- vealing structural information. A key problem in DWI is nondiffusive bulk motion, which causes phase shifts in the voxel signal (1). When data are gathered in a multishot acquisition, phase shifts from different excitations can de- structively interfere to cause serious image artifacts. A number of methods have been proposed to deal with motion artifacts in DWI. One simple way to avoid motion- induced artifacts is to gather the image data in a single acquisition, in which case the image magnitude is uncor- rupted. However, these single-shot acquisitions have lim- ited resolution and are sensitive to susceptibility and eddy-current effects. Another approach is to correct mo- tion-induced phase artifacts before combining the data from multiple acquisitions. Phase correction imposes no intrinsic limits on resolution, but does require the acqui- sition of additional navigator data that resolve the phase errors in image space. Early works acquired 1D projection navigators (1–3) or pairs of orthogonal projections (4), and subsequent studies have extended this approach to a vari- ety of pulse sequences and trajectories (5–11). An impor- tant disadvantage of 1D navigation is the inability to cor- rect for phase shifts orthogonal to the direction of naviga- tion. Recent studies have addressed this problem with 2D navigation (12–14). Navigated DWI methods typically assume rigid-body motion, the effects of which have been well characterized (1,15). However, a significant component of brain motion is nonrigid (16 –18). During systole, the brain deforms about the ventricles and displaces inferiorly through the foramen magnum as though being pulled by the spinal cord. The more superior and lateral regions of the brain are nearly motionless, whereas the more inferior and medial regions tend to experience large displacements. Even dur- ing the relative quiescence of diastole, motion induced by the cardiac cycle follows this nonlinear spatial pattern as the brain slowly returns to its resting position. In the presence of diffusion-weighting gradients, these deformations cause phase corruptions that vary nonlin- early across the object magnetization. The effect of brain motion on the DWI signal is shown in Fig. 1. The signal phase and amplitude are correlated with the cardiac cycle and exhibit nonlinear spatial variation. The loss in signal amplitude during peak systole is due to intravoxel dephas- ing caused by intense motion. The highly focal nature of this dephasing highlights the spatial nonlinearity of phase corruptions. These phase errors are problematic for multishot acqui- sitions because each readout experiences a different im- age-space phase corruption ( j ( r) for the jth readout). This causes phase interference when readouts are combined to form a high-resolution image. Navigated techniques cor- rect phase errors with low-resolution navigator data that are acquired along with each high-resolution data frame (2). Provided the navigator data 1) samples the same phase error j ( r) as the high-resolution data, and 2) covers k- space sufficiently to resolve j ( r), the navigator can be used to correct phase errors in the high-resolution data before the interleaves are combined. Based on the assump- tion of rigid-body motion, standard navigator methods cor- rect for zeroth- and first-order phase terms (1). In the presence of the nonrigid motions described above, a rigid- body correction is a first-order approximation to the de- Magnetic Resonance Systems Research Laboratory, Department of Electrical Engineering, Stanford University, Stanford, California. Grant sponsor: NIH; Grant numbers: R01 CA50948; R01 AR46904. *Correspondence to: Karla L. Miller, Packard Electrical Engineering Building, Room 210, Stanford University, Stanford, CA 94305-9510. E-mail: [email protected] Received 29 August 2002; revised 28 March 2003; accepted 2 April 2003. DOI 10.1002/mrm.10531 Published online in Wiley InterScience (www.interscience.wiley.com). Magnetic Resonance in Medicine 50:343–353 (2003) © 2003 Wiley-Liss, Inc. 343
Transcript of Nonlinear phase correction for navigated diffusion imaging

Nonlinear Phase Correction for NavigatedDiffusion Imaging
Karla L. Miller* and John M. Pauly
Motion during diffusion-weighted imaging (DWI) introducesphase errors that can cause significant artifacts in brain im-ages. One method of correcting these errors uses additionalnavigator data to measure the phase corruptions. Standardnavigator methods correct for rigid-body motion but cannotcorrect for nonrigid deformations of the brain related to thecardiac cycle. This work derives a generalized reconstructionthat corrects for nonrigid motion based on a least-squaresformulation. Since this reconstruction has the disadvantage ofbeing computationally expensive, an approximation is pre-sented, called a refocusing reconstruction. The refocusing re-construction is both efficient and straightforward. Each readoutis multiplied in image space by the phase conjugate of thenavigator image, and these rephased readouts are thensummed. The conditions under which the refocusing recon-struction is sufficient are considered and methods to improvethe quality of refocused images are discussed. In particular,synchronization of the acquisition to the cardiac cycle canprovide data that is well-conditioned to the refocusing recon-struction without incurring the large time penalty traditionallyassociated with cardiac gating. These methods are applied tosteady-state DWI, a promising pulse sequence that is particu-larly sensitive to motion-induced phase artifacts. The refocus-ing reconstruction is shown to significantly improve SS-DWIover standard rigid-body corrections. Magn Reson Med 50:343–353, 2003. © 2003 Wiley-Liss, Inc.
Key words: diffusion MRI; motion correction; artifact reduction;navigator; reconstruction
Diffusion-weighted imaging (DWI) is a powerful tool forprobing tissue microstructure that uses large bipolar gra-dient pairs to impart phase to moving particles. Diffusingwater spins within a voxel experience phase dispersion,causing signal attenuation that is dependent on theamount of diffusion. This attenuation results in diffusioncontrast, which has been shown to be useful in brainimaging for detecting tissue disease states, as well as re-vealing structural information. A key problem in DWI isnondiffusive bulk motion, which causes phase shifts in thevoxel signal (1). When data are gathered in a multishotacquisition, phase shifts from different excitations can de-structively interfere to cause serious image artifacts.
A number of methods have been proposed to deal withmotion artifacts in DWI. One simple way to avoid motion-induced artifacts is to gather the image data in a singleacquisition, in which case the image magnitude is uncor-
rupted. However, these single-shot acquisitions have lim-ited resolution and are sensitive to susceptibility andeddy-current effects. Another approach is to correct mo-tion-induced phase artifacts before combining the datafrom multiple acquisitions. Phase correction imposes nointrinsic limits on resolution, but does require the acqui-sition of additional navigator data that resolve the phaseerrors in image space. Early works acquired 1D projectionnavigators (1–3) or pairs of orthogonal projections (4), andsubsequent studies have extended this approach to a vari-ety of pulse sequences and trajectories (5–11). An impor-tant disadvantage of 1D navigation is the inability to cor-rect for phase shifts orthogonal to the direction of naviga-tion. Recent studies have addressed this problem with 2Dnavigation (12–14).
Navigated DWI methods typically assume rigid-bodymotion, the effects of which have been well characterized(1,15). However, a significant component of brain motionis nonrigid (16–18). During systole, the brain deformsabout the ventricles and displaces inferiorly through theforamen magnum as though being pulled by the spinalcord. The more superior and lateral regions of the brain arenearly motionless, whereas the more inferior and medialregions tend to experience large displacements. Even dur-ing the relative quiescence of diastole, motion induced bythe cardiac cycle follows this nonlinear spatial pattern asthe brain slowly returns to its resting position.
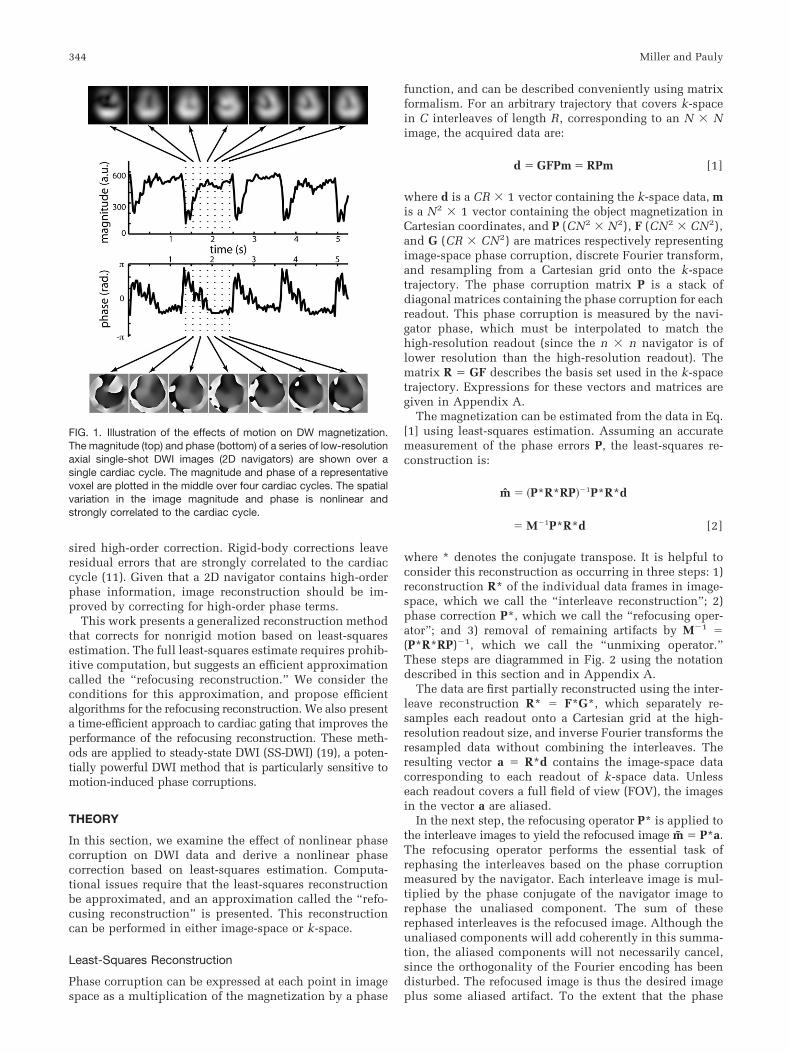
In the presence of diffusion-weighting gradients, thesedeformations cause phase corruptions that vary nonlin-early across the object magnetization. The effect of brainmotion on the DWI signal is shown in Fig. 1. The signalphase and amplitude are correlated with the cardiac cycleand exhibit nonlinear spatial variation. The loss in signalamplitude during peak systole is due to intravoxel dephas-ing caused by intense motion. The highly focal nature ofthis dephasing highlights the spatial nonlinearity of phasecorruptions.
These phase errors are problematic for multishot acqui-sitions because each readout experiences a different im-age-space phase corruption (�j(r) for the jth readout). Thiscauses phase interference when readouts are combined toform a high-resolution image. Navigated techniques cor-rect phase errors with low-resolution navigator data thatare acquired along with each high-resolution data frame(2). Provided the navigator data 1) samples the same phaseerror �j(r) as the high-resolution data, and 2) covers k-space sufficiently to resolve �j(r), the navigator can beused to correct phase errors in the high-resolution databefore the interleaves are combined. Based on the assump-tion of rigid-body motion, standard navigator methods cor-rect for zeroth- and first-order phase terms (1). In thepresence of the nonrigid motions described above, a rigid-body correction is a first-order approximation to the de-
Magnetic Resonance Systems Research Laboratory, Department of ElectricalEngineering, Stanford University, Stanford, California.Grant sponsor: NIH; Grant numbers: R01 CA50948; R01 AR46904.*Correspondence to: Karla L. Miller, Packard Electrical Engineering Building,Room 210, Stanford University, Stanford, CA 94305-9510. E-mail:[email protected] 29 August 2002; revised 28 March 2003; accepted 2 April 2003.DOI 10.1002/mrm.10531Published online in Wiley InterScience (www.interscience.wiley.com).
Magnetic Resonance in Medicine 50:343–353 (2003)
© 2003 Wiley-Liss, Inc. 343
sired high-order correction. Rigid-body corrections leaveresidual errors that are strongly correlated to the cardiaccycle (11). Given that a 2D navigator contains high-orderphase information, image reconstruction should be im-proved by correcting for high-order phase terms.
This work presents a generalized reconstruction methodthat corrects for nonrigid motion based on least-squaresestimation. The full least-squares estimate requires prohib-itive computation, but suggests an efficient approximationcalled the “refocusing reconstruction.” We consider theconditions for this approximation, and propose efficientalgorithms for the refocusing reconstruction. We also presenta time-efficient approach to cardiac gating that improves theperformance of the refocusing reconstruction. These meth-ods are applied to steady-state DWI (SS-DWI) (19), a poten-tially powerful DWI method that is particularly sensitive tomotion-induced phase corruptions.
THEORY
In this section, we examine the effect of nonlinear phasecorruption on DWI data and derive a nonlinear phasecorrection based on least-squares estimation. Computa-tional issues require that the least-squares reconstructionbe approximated, and an approximation called the “refo-cusing reconstruction” is presented. This reconstructioncan be performed in either image-space or k-space.
Least-Squares Reconstruction
Phase corruption can be expressed at each point in imagespace as a multiplication of the magnetization by a phase
function, and can be described conveniently using matrixformalism. For an arbitrary trajectory that covers k-spacein C interleaves of length R, corresponding to an N � Nimage, the acquired data are:
d � GFPm � RPm [1]
where d is a CR � 1 vector containing the k-space data, mis a N2 � 1 vector containing the object magnetization inCartesian coordinates, and P (CN2 � N2), F (CN2 � CN2),and G (CR � CN2) are matrices respectively representingimage-space phase corruption, discrete Fourier transform,and resampling from a Cartesian grid onto the k-spacetrajectory. The phase corruption matrix P is a stack ofdiagonal matrices containing the phase corruption for eachreadout. This phase corruption is measured by the navi-gator phase, which must be interpolated to match thehigh-resolution readout (since the n � n navigator is oflower resolution than the high-resolution readout). Thematrix R � GF describes the basis set used in the k-spacetrajectory. Expressions for these vectors and matrices aregiven in Appendix A.
The magnetization can be estimated from the data in Eq.[1] using least-squares estimation. Assuming an accuratemeasurement of the phase errors P, the least-squares re-construction is:
m̂ � �P*R*RP��1P*R*d
� M�1P*R*d [2]
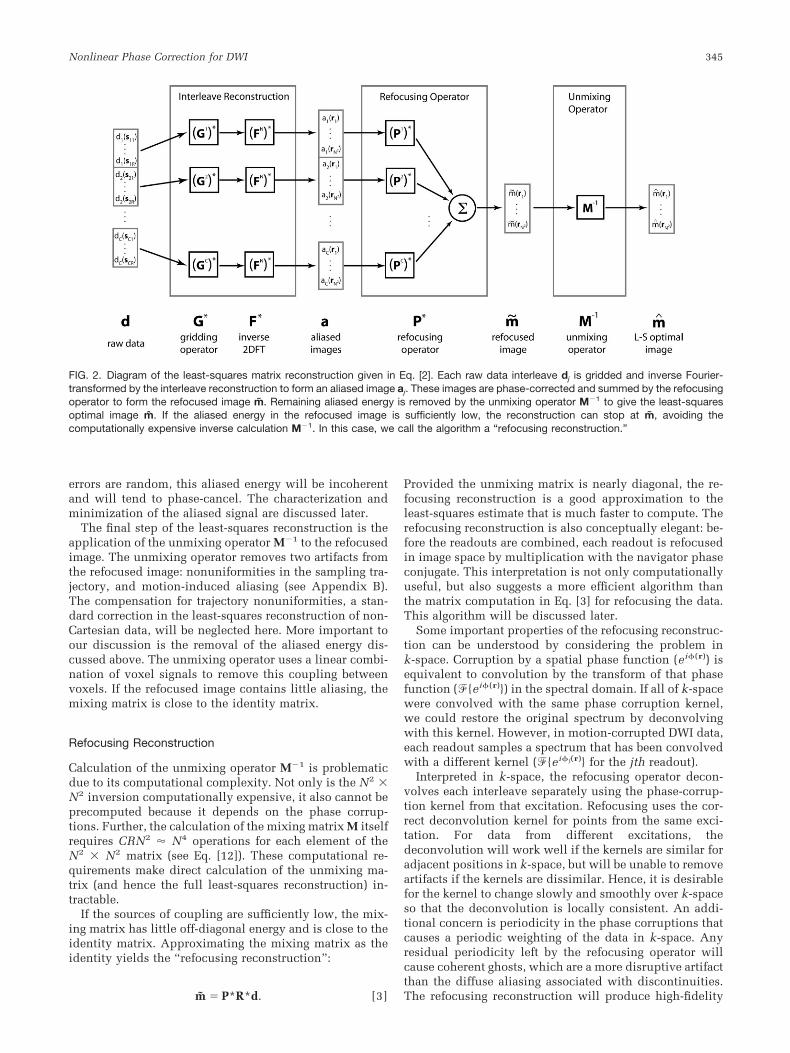
where * denotes the conjugate transpose. It is helpful toconsider this reconstruction as occurring in three steps: 1)reconstruction R* of the individual data frames in image-space, which we call the “interleave reconstruction”; 2)phase correction P*, which we call the “refocusing oper-ator”; and 3) removal of remaining artifacts by M�1 �(P*R*RP)�1, which we call the “unmixing operator.”These steps are diagrammed in Fig. 2 using the notationdescribed in this section and in Appendix A.
The data are first partially reconstructed using the inter-leave reconstruction R* � F*G*, which separately re-samples each readout onto a Cartesian grid at the high-resolution readout size, and inverse Fourier transforms theresampled data without combining the interleaves. Theresulting vector a � R*d contains the image-space datacorresponding to each readout of k-space data. Unlesseach readout covers a full field of view (FOV), the imagesin the vector a are aliased.
In the next step, the refocusing operator P* is applied tothe interleave images to yield the refocused image m̃ � P*a.The refocusing operator performs the essential task ofrephasing the interleaves based on the phase corruptionmeasured by the navigator. Each interleave image is mul-tiplied by the phase conjugate of the navigator image torephase the unaliased component. The sum of theserephased interleaves is the refocused image. Although theunaliased components will add coherently in this summa-tion, the aliased components will not necessarily cancel,since the orthogonality of the Fourier encoding has beendisturbed. The refocused image is thus the desired imageplus some aliased artifact. To the extent that the phase
FIG. 1. Illustration of the effects of motion on DW magnetization.The magnitude (top) and phase (bottom) of a series of low-resolutionaxial single-shot DWI images (2D navigators) are shown over asingle cardiac cycle. The magnitude and phase of a representativevoxel are plotted in the middle over four cardiac cycles. The spatialvariation in the image magnitude and phase is nonlinear andstrongly correlated to the cardiac cycle.
344 Miller and Pauly
errors are random, this aliased energy will be incoherentand will tend to phase-cancel. The characterization andminimization of the aliased signal are discussed later.
The final step of the least-squares reconstruction is theapplication of the unmixing operator M�1 to the refocusedimage. The unmixing operator removes two artifacts fromthe refocused image: nonuniformities in the sampling tra-jectory, and motion-induced aliasing (see Appendix B).The compensation for trajectory nonuniformities, a stan-dard correction in the least-squares reconstruction of non-Cartesian data, will be neglected here. More important toour discussion is the removal of the aliased energy dis-cussed above. The unmixing operator uses a linear combi-nation of voxel signals to remove this coupling betweenvoxels. If the refocused image contains little aliasing, themixing matrix is close to the identity matrix.
Refocusing Reconstruction
Calculation of the unmixing operator M�1 is problematicdue to its computational complexity. Not only is the N2 �N2 inversion computationally expensive, it also cannot beprecomputed because it depends on the phase corrup-tions. Further, the calculation of the mixing matrix M itselfrequires CRN2 � N4 operations for each element of theN2 � N2 matrix (see Eq. [12]). These computational re-quirements make direct calculation of the unmixing ma-trix (and hence the full least-squares reconstruction) in-tractable.
If the sources of coupling are sufficiently low, the mix-ing matrix has little off-diagonal energy and is close to theidentity matrix. Approximating the mixing matrix as theidentity yields the “refocusing reconstruction”:
m̃ � P*R*d. [3]
Provided the unmixing matrix is nearly diagonal, the re-focusing reconstruction is a good approximation to theleast-squares estimate that is much faster to compute. Therefocusing reconstruction is also conceptually elegant: be-fore the readouts are combined, each readout is refocusedin image space by multiplication with the navigator phaseconjugate. This interpretation is not only computationallyuseful, but also suggests a more efficient algorithm thanthe matrix computation in Eq. [3] for refocusing the data.This algorithm will be discussed later.
Some important properties of the refocusing reconstruc-tion can be understood by considering the problem ink-space. Corruption by a spatial phase function (ei�(r)) isequivalent to convolution by the transform of that phasefunction (�{ei�(r)}) in the spectral domain. If all of k-spacewere convolved with the same phase corruption kernel,we could restore the original spectrum by deconvolvingwith this kernel. However, in motion-corrupted DWI data,each readout samples a spectrum that has been convolvedwith a different kernel (�{ei�j(r)} for the jth readout).
Interpreted in k-space, the refocusing operator decon-volves each interleave separately using the phase-corrup-tion kernel from that excitation. Refocusing uses the cor-rect deconvolution kernel for points from the same exci-tation. For data from different excitations, thedeconvolution will work well if the kernels are similar foradjacent positions in k-space, but will be unable to removeartifacts if the kernels are dissimilar. Hence, it is desirablefor the kernel to change slowly and smoothly over k-spaceso that the deconvolution is locally consistent. An addi-tional concern is periodicity in the phase corruptions thatcauses a periodic weighting of the data in k-space. Anyresidual periodicity left by the refocusing operator willcause coherent ghosts, which are a more disruptive artifactthan the diffuse aliasing associated with discontinuities.The refocusing reconstruction will produce high-fidelity
FIG. 2. Diagram of the least-squares matrix reconstruction given in Eq. [2]. Each raw data interleave dj is gridded and inverse Fourier-transformed by the interleave reconstruction to form an aliased image aj. These images are phase-corrected and summed by the refocusingoperator to form the refocused image m̃. Remaining aliased energy is removed by the unmixing operator M�1 to give the least-squaresoptimal image m̂. If the aliased energy in the refocused image is sufficiently low, the reconstruction can stop at m̃, avoiding thecomputationally expensive inverse calculation M�1. In this case, we call the algorithm a “refocusing reconstruction.”
Nonlinear Phase Correction for DWI 345
images when phase corruptions are smooth and nonperi-odic in k-space.
MATERIALS AND METHODS
Efficient Refocusing Reconstruction
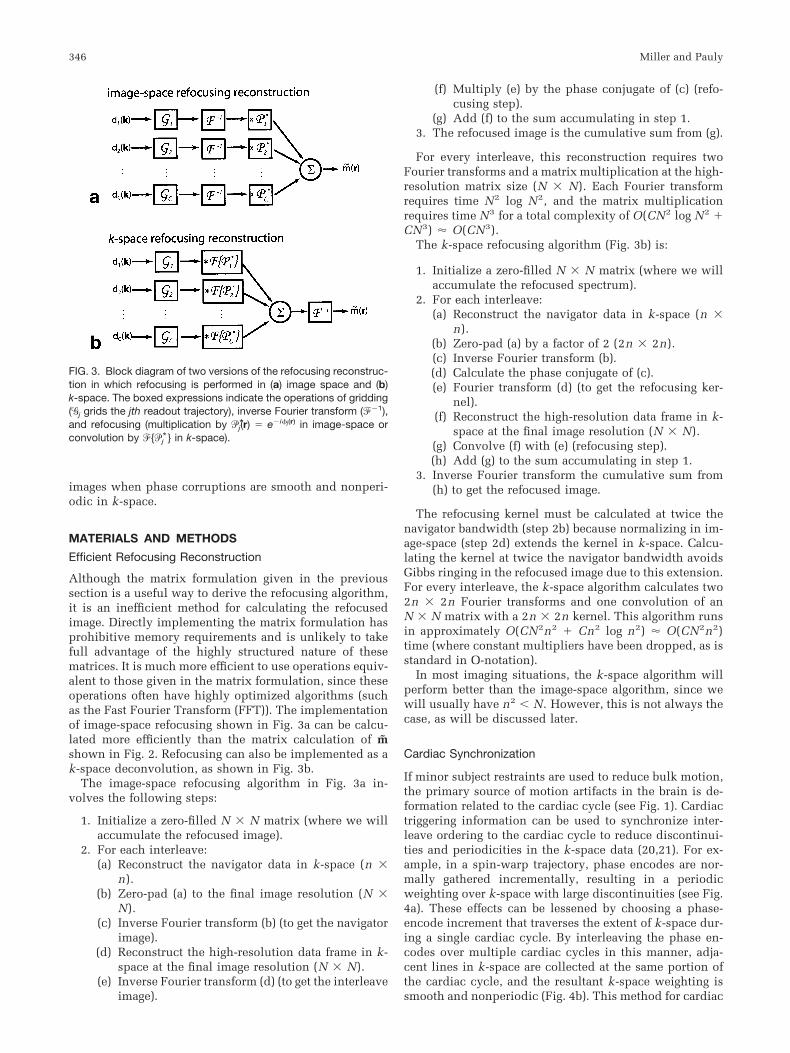
Although the matrix formulation given in the previoussection is a useful way to derive the refocusing algorithm,it is an inefficient method for calculating the refocusedimage. Directly implementing the matrix formulation hasprohibitive memory requirements and is unlikely to takefull advantage of the highly structured nature of thesematrices. It is much more efficient to use operations equiv-alent to those given in the matrix formulation, since theseoperations often have highly optimized algorithms (suchas the Fast Fourier Transform (FFT)). The implementationof image-space refocusing shown in Fig. 3a can be calcu-lated more efficiently than the matrix calculation of m̃shown in Fig. 2. Refocusing can also be implemented as ak-space deconvolution, as shown in Fig. 3b.
The image-space refocusing algorithm in Fig. 3a in-volves the following steps:
1. Initialize a zero-filled N � N matrix (where we willaccumulate the refocused image).
2. For each interleave:(a) Reconstruct the navigator data in k-space (n �
n).(b) Zero-pad (a) to the final image resolution (N �
N).(c) Inverse Fourier transform (b) (to get the navigator
image).(d) Reconstruct the high-resolution data frame in k-
space at the final image resolution (N � N).(e) Inverse Fourier transform (d) (to get the interleave
image).
(f) Multiply (e) by the phase conjugate of (c) (refo-cusing step).
(g) Add (f) to the sum accumulating in step 1.3. The refocused image is the cumulative sum from (g).
For every interleave, this reconstruction requires twoFourier transforms and a matrix multiplication at the high-resolution matrix size (N � N). Each Fourier transformrequires time N2 log N2, and the matrix multiplicationrequires time N3 for a total complexity of O(CN2 log N2 �CN3) � O(CN3).
The k-space refocusing algorithm (Fig. 3b) is:
1. Initialize a zero-filled N � N matrix (where we willaccumulate the refocused spectrum).
2. For each interleave:(a) Reconstruct the navigator data in k-space (n �
n).(b) Zero-pad (a) by a factor of 2 (2n � 2n).(c) Inverse Fourier transform (b).(d) Calculate the phase conjugate of (c).(e) Fourier transform (d) (to get the refocusing ker-
nel).(f) Reconstruct the high-resolution data frame in k-
space at the final image resolution (N � N).(g) Convolve (f) with (e) (refocusing step).(h) Add (g) to the sum accumulating in step 1.
3. Inverse Fourier transform the cumulative sum from(h) to get the refocused image.
The refocusing kernel must be calculated at twice thenavigator bandwidth (step 2b) because normalizing in im-age-space (step 2d) extends the kernel in k-space. Calcu-lating the kernel at twice the navigator bandwidth avoidsGibbs ringing in the refocused image due to this extension.For every interleave, the k-space algorithm calculates two2n � 2n Fourier transforms and one convolution of anN � N matrix with a 2n � 2n kernel. This algorithm runsin approximately O(CN2n2 � Cn2 log n2) � O(CN2n2)time (where constant multipliers have been dropped, as isstandard in O-notation).
In most imaging situations, the k-space algorithm willperform better than the image-space algorithm, since wewill usually have n2 N. However, this is not always thecase, as will be discussed later.
Cardiac Synchronization
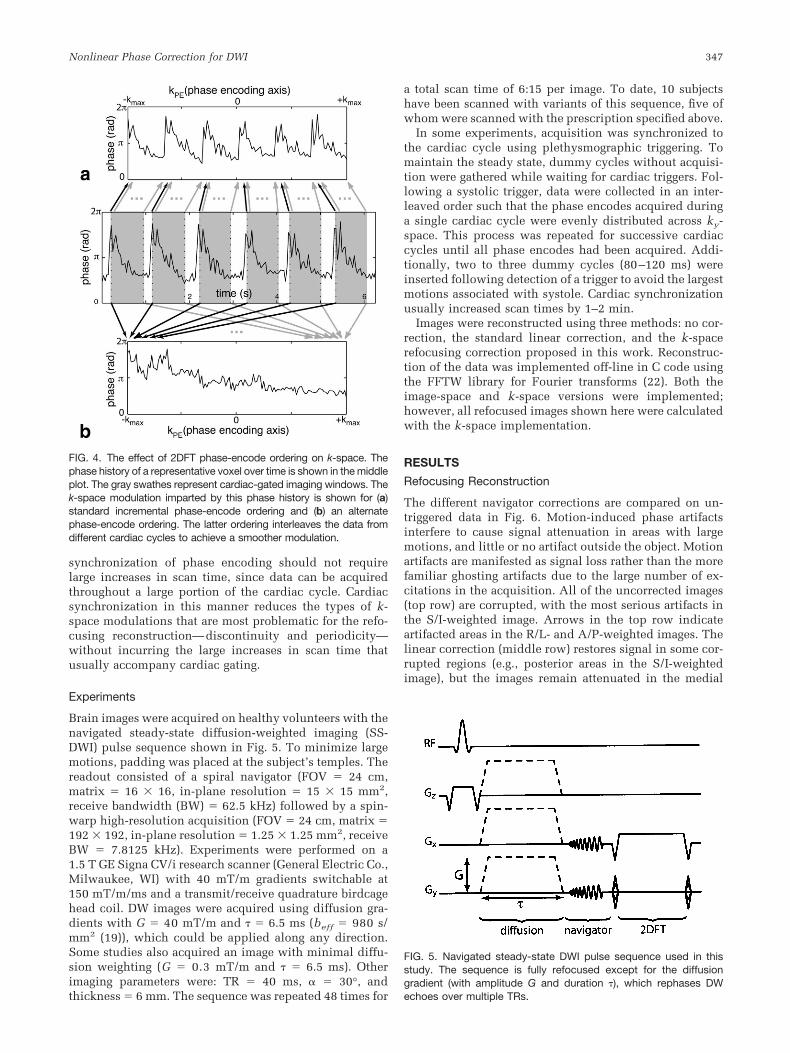
If minor subject restraints are used to reduce bulk motion,the primary source of motion artifacts in the brain is de-formation related to the cardiac cycle (see Fig. 1). Cardiactriggering information can be used to synchronize inter-leave ordering to the cardiac cycle to reduce discontinui-ties and periodicities in the k-space data (20,21). For ex-ample, in a spin-warp trajectory, phase encodes are nor-mally gathered incrementally, resulting in a periodicweighting over k-space with large discontinuities (see Fig.4a). These effects can be lessened by choosing a phase-encode increment that traverses the extent of k-space dur-ing a single cardiac cycle. By interleaving the phase en-codes over multiple cardiac cycles in this manner, adja-cent lines in k-space are collected at the same portion ofthe cardiac cycle, and the resultant k-space weighting issmooth and nonperiodic (Fig. 4b). This method for cardiac
FIG. 3. Block diagram of two versions of the refocusing reconstruc-tion in which refocusing is performed in (a) image space and (b)k-space. The boxed expressions indicate the operations of gridding(�j grids the jth readout trajectory), inverse Fourier transform (��1),and refocusing (multiplication by �*j(r) � e�i�j(r) in image-space orconvolution by �{�*j } in k-space).
346 Miller and Pauly
synchronization of phase encoding should not requirelarge increases in scan time, since data can be acquiredthroughout a large portion of the cardiac cycle. Cardiacsynchronization in this manner reduces the types of k-space modulations that are most problematic for the refo-cusing reconstruction—discontinuity and periodicity—without incurring the large increases in scan time thatusually accompany cardiac gating.
Experiments
Brain images were acquired on healthy volunteers with thenavigated steady-state diffusion-weighted imaging (SS-DWI) pulse sequence shown in Fig. 5. To minimize largemotions, padding was placed at the subject’s temples. Thereadout consisted of a spiral navigator (FOV � 24 cm,matrix � 16 � 16, in-plane resolution � 15 � 15 mm2,receive bandwidth (BW) � 62.5 kHz) followed by a spin-warp high-resolution acquisition (FOV � 24 cm, matrix �192 � 192, in-plane resolution � 1.25 � 1.25 mm2, receiveBW � 7.8125 kHz). Experiments were performed on a1.5 T GE Signa CV/i research scanner (General Electric Co.,Milwaukee, WI) with 40 mT/m gradients switchable at150 mT/m/ms and a transmit/receive quadrature birdcagehead coil. DW images were acquired using diffusion gra-dients with G � 40 mT/m and � 6.5 ms (beff � 980 s/mm2 (19)), which could be applied along any direction.Some studies also acquired an image with minimal diffu-sion weighting (G � 0.3 mT/m and � 6.5 ms). Otherimaging parameters were: TR � 40 ms, � � 30°, andthickness � 6 mm. The sequence was repeated 48 times for
a total scan time of 6:15 per image. To date, 10 subjectshave been scanned with variants of this sequence, five ofwhom were scanned with the prescription specified above.
In some experiments, acquisition was synchronized tothe cardiac cycle using plethysmographic triggering. Tomaintain the steady state, dummy cycles without acquisi-tion were gathered while waiting for cardiac triggers. Fol-lowing a systolic trigger, data were collected in an inter-leaved order such that the phase encodes acquired duringa single cardiac cycle were evenly distributed across ky-space. This process was repeated for successive cardiaccycles until all phase encodes had been acquired. Addi-tionally, two to three dummy cycles (80–120 ms) wereinserted following detection of a trigger to avoid the largestmotions associated with systole. Cardiac synchronizationusually increased scan times by 1–2 min.
Images were reconstructed using three methods: no cor-rection, the standard linear correction, and the k-spacerefocusing correction proposed in this work. Reconstruc-tion of the data was implemented off-line in C code usingthe FFTW library for Fourier transforms (22). Both theimage-space and k-space versions were implemented;however, all refocused images shown here were calculatedwith the k-space implementation.
RESULTS
Refocusing Reconstruction
The different navigator corrections are compared on un-triggered data in Fig. 6. Motion-induced phase artifactsinterfere to cause signal attenuation in areas with largemotions, and little or no artifact outside the object. Motionartifacts are manifested as signal loss rather than the morefamiliar ghosting artifacts due to the large number of ex-citations in the acquisition. All of the uncorrected images(top row) are corrupted, with the most serious artifacts inthe S/I-weighted image. Arrows in the top row indicateartifacted areas in the R/L- and A/P-weighted images. Thelinear correction (middle row) restores signal in some cor-rupted regions (e.g., posterior areas in the S/I-weightedimage), but the images remain attenuated in the medial
FIG. 5. Navigated steady-state DWI pulse sequence used in thisstudy. The sequence is fully refocused except for the diffusiongradient (with amplitude G and duration ), which rephases DWechoes over multiple TRs.
FIG. 4. The effect of 2DFT phase-encode ordering on k-space. Thephase history of a representative voxel over time is shown in the middleplot. The gray swathes represent cardiac-gated imaging windows. Thek-space modulation imparted by this phase history is shown for (a)standard incremental phase-encode ordering and (b) an alternatephase-encode ordering. The latter ordering interleaves the data fromdifferent cardiac cycles to achieve a smoother modulation.
Nonlinear Phase Correction for DWI 347
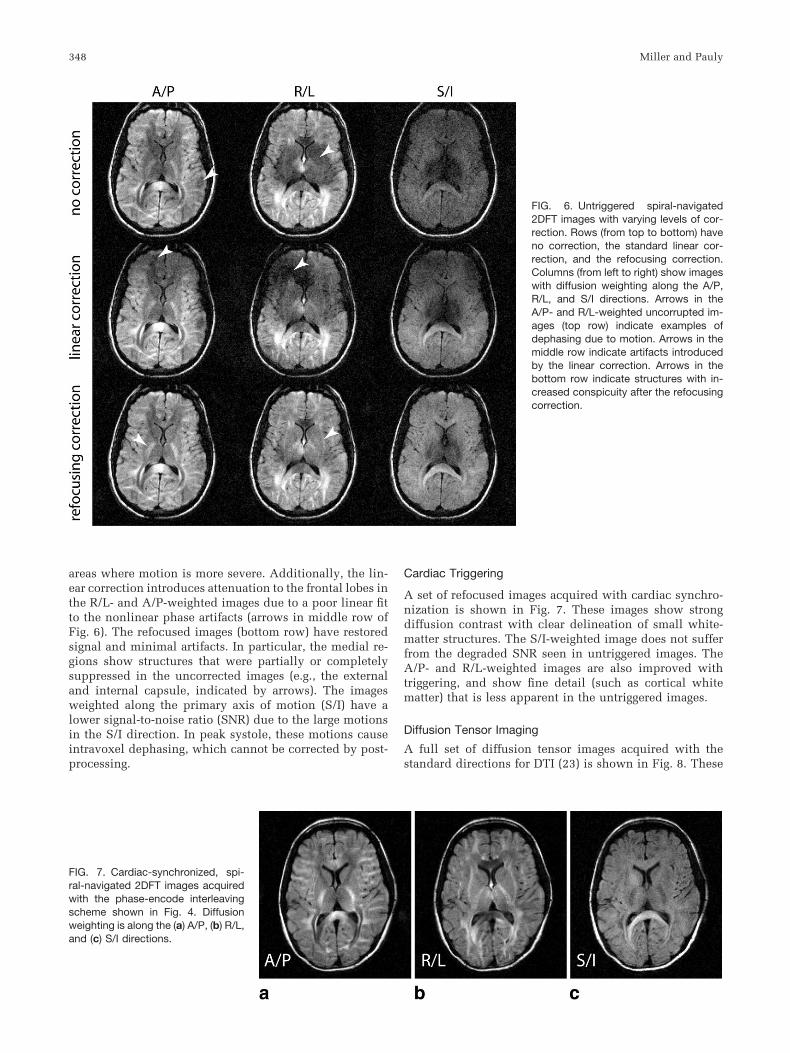
areas where motion is more severe. Additionally, the lin-ear correction introduces attenuation to the frontal lobes inthe R/L- and A/P-weighted images due to a poor linear fitto the nonlinear phase artifacts (arrows in middle row ofFig. 6). The refocused images (bottom row) have restoredsignal and minimal artifacts. In particular, the medial re-gions show structures that were partially or completelysuppressed in the uncorrected images (e.g., the externaland internal capsule, indicated by arrows). The imagesweighted along the primary axis of motion (S/I) have alower signal-to-noise ratio (SNR) due to the large motionsin the S/I direction. In peak systole, these motions causeintravoxel dephasing, which cannot be corrected by post-processing.
Cardiac Triggering
A set of refocused images acquired with cardiac synchro-nization is shown in Fig. 7. These images show strongdiffusion contrast with clear delineation of small white-matter structures. The S/I-weighted image does not sufferfrom the degraded SNR seen in untriggered images. TheA/P- and R/L-weighted images are also improved withtriggering, and show fine detail (such as cortical whitematter) that is less apparent in the untriggered images.
Diffusion Tensor Imaging
A full set of diffusion tensor images acquired with thestandard directions for DTI (23) is shown in Fig. 8. These
FIG. 6. Untriggered spiral-navigated2DFT images with varying levels of cor-rection. Rows (from top to bottom) haveno correction, the standard linear cor-rection, and the refocusing correction.Columns (from left to right) show imageswith diffusion weighting along the A/P,R/L, and S/I directions. Arrows in theA/P- and R/L-weighted uncorrupted im-ages (top row) indicate examples ofdephasing due to motion. Arrows in themiddle row indicate artifacts introducedby the linear correction. Arrows in thebottom row indicate structures with in-creased conspicuity after the refocusingcorrection.
FIG. 7. Cardiac-synchronized, spi-ral-navigated 2DFT images acquiredwith the phase-encode interleavingscheme shown in Fig. 4. Diffusionweighting is along the (a) A/P, (b) R/L,and (c) S/I directions.
348 Miller and Pauly
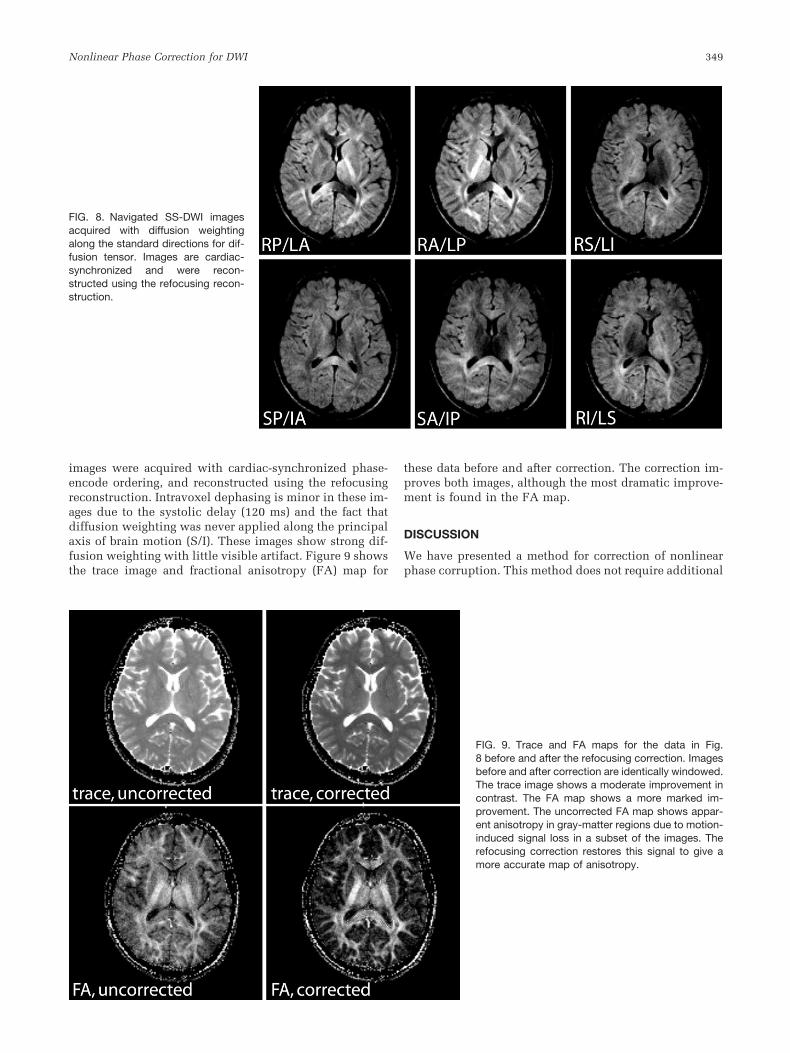
images were acquired with cardiac-synchronized phase-encode ordering, and reconstructed using the refocusingreconstruction. Intravoxel dephasing is minor in these im-ages due to the systolic delay (120 ms) and the fact thatdiffusion weighting was never applied along the principalaxis of brain motion (S/I). These images show strong dif-fusion weighting with little visible artifact. Figure 9 showsthe trace image and fractional anisotropy (FA) map for
these data before and after correction. The correction im-proves both images, although the most dramatic improve-ment is found in the FA map.
DISCUSSION
We have presented a method for correction of nonlinearphase corruption. This method does not require additional
FIG. 8. Navigated SS-DWI imagesacquired with diffusion weightingalong the standard directions for dif-fusion tensor. Images are cardiac-synchronized and were recon-structed using the refocusing recon-struction.
FIG. 9. Trace and FA maps for the data in Fig.8 before and after the refocusing correction. Imagesbefore and after correction are identically windowed.The trace image shows a moderate improvement incontrast. The FA map shows a more marked im-provement. The uncorrected FA map shows appar-ent anisotropy in gray-matter regions due to motion-induced signal loss in a subset of the images. Therefocusing correction restores this signal to give amore accurate map of anisotropy.
Nonlinear Phase Correction for DWI 349
navigator data beyond those used for 2D linear corrections.Rather, the refocusing correction represents a more com-plete use of the information in the navigator. The refocus-ing reconstruction algorithm is straightforward to imple-ment: refocusing is simply a k-space deconvolution that isperformed before individual readouts are combined. Alter-natively, it can be thought of as image-space multiplica-tion of individual data frames by the navigator phase con-jugate.
Generality of Reconstruction
The least-squares reconstruction is general in the sensethat its derivation does not make assumptions about thetrajectory or pulse sequence used to gather the data. Al-though the refocusing reconstruction will not always be agood approximation of the least-squares solution, it isexpected to perform well provided the k-space modulationinduced by phase corruptions has minimal discontinuityand periodicity. In addition to the 2DFT data shown here,we previously used the refocusing reconstruction for self-navigated spiral data with similar results (24). Pipe andcolleagues (14) have also had good success using a refo-cusing reconstruction with an FSE PROPELLER sequence(however, in their case, the refocusing reconstruction wasthe same as the least-squares reconstruction, since eachreadout was unaliased).
While full least-squares reconstruction is generally in-tractable due to the inversion of the mixing matrix, it maybe manageable in special cases or with efficient approxi-mations. For example, the mixing matrix M will be blockdiagonal and sparse for trajectories in which the signalfrom a voxel can only alias onto a subset of the othervoxels (see Appendix B). In this case, the matrix inversionof M can be calculated by individually inverting thesmaller block submatrices. In our experience, this calcu-lation is still very time-consuming. Alternatively, the mix-ing matrix could be approximated with an iterativescheme similar to that proposed for multicoil reconstruc-tions (25).
Fidelity of the Refocusing Reconstruction
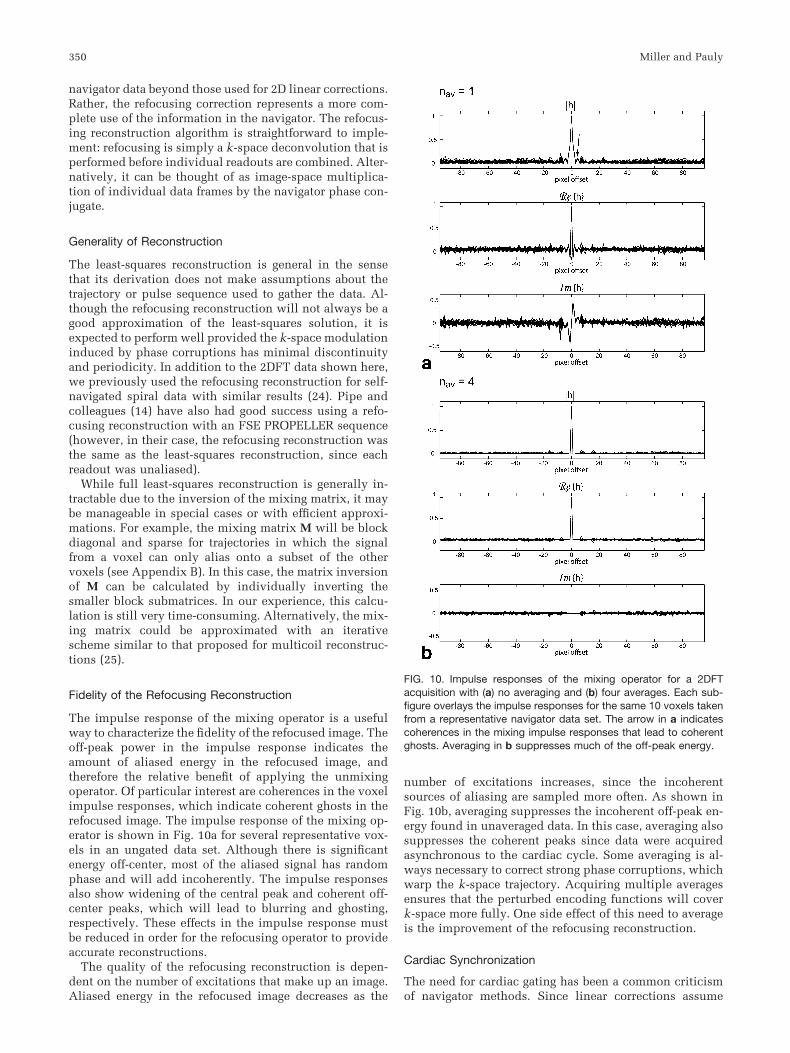
The impulse response of the mixing operator is a usefulway to characterize the fidelity of the refocused image. Theoff-peak power in the impulse response indicates theamount of aliased energy in the refocused image, andtherefore the relative benefit of applying the unmixingoperator. Of particular interest are coherences in the voxelimpulse responses, which indicate coherent ghosts in therefocused image. The impulse response of the mixing op-erator is shown in Fig. 10a for several representative vox-els in an ungated data set. Although there is significantenergy off-center, most of the aliased signal has randomphase and will add incoherently. The impulse responsesalso show widening of the central peak and coherent off-center peaks, which will lead to blurring and ghosting,respectively. These effects in the impulse response mustbe reduced in order for the refocusing operator to provideaccurate reconstructions.
The quality of the refocusing reconstruction is depen-dent on the number of excitations that make up an image.Aliased energy in the refocused image decreases as the
number of excitations increases, since the incoherentsources of aliasing are sampled more often. As shown inFig. 10b, averaging suppresses the incoherent off-peak en-ergy found in unaveraged data. In this case, averaging alsosuppresses the coherent peaks since data were acquiredasynchronous to the cardiac cycle. Some averaging is al-ways necessary to correct strong phase corruptions, whichwarp the k-space trajectory. Acquiring multiple averagesensures that the perturbed encoding functions will coverk-space more fully. One side effect of this need to averageis the improvement of the refocusing reconstruction.
Cardiac Synchronization
The need for cardiac gating has been a common criticismof navigator methods. Since linear corrections assume
FIG. 10. Impulse responses of the mixing operator for a 2DFTacquisition with (a) no averaging and (b) four averages. Each sub-figure overlays the impulse responses for the same 10 voxels takenfrom a representative navigator data set. The arrow in a indicatescoherences in the mixing impulse responses that lead to coherentghosts. Averaging in b suppresses much of the off-peak energy.
350 Miller and Pauly
rigid-body motion, cardiac gating is required to limitimaging to the more stable portions of the cardiac cycle,in which motions are better approximated as linear.With the nonlinear corrections introduced here, post-systolic delays only have to be long enough to avoidintravoxel dephasing during peak systole, which cannotbe corrected in postprocessing. For the 2DFT SS-DWIsequence used here, cardiac synchronization requiresonly moderate increases in scan time (25–33%). Thisimaging efficiency is possible because cardiac informa-tion is being used to synchronize the acquisition to thecardiac cycle, rather than simply limiting the portion ofthe cardiac cycle in which data are gathered. Our cur-rent implementation approximates the heart rate for theentire scan. Monitoring changes in heart rate duringscanning would further reduce the overhead time forcardiac synchronization.
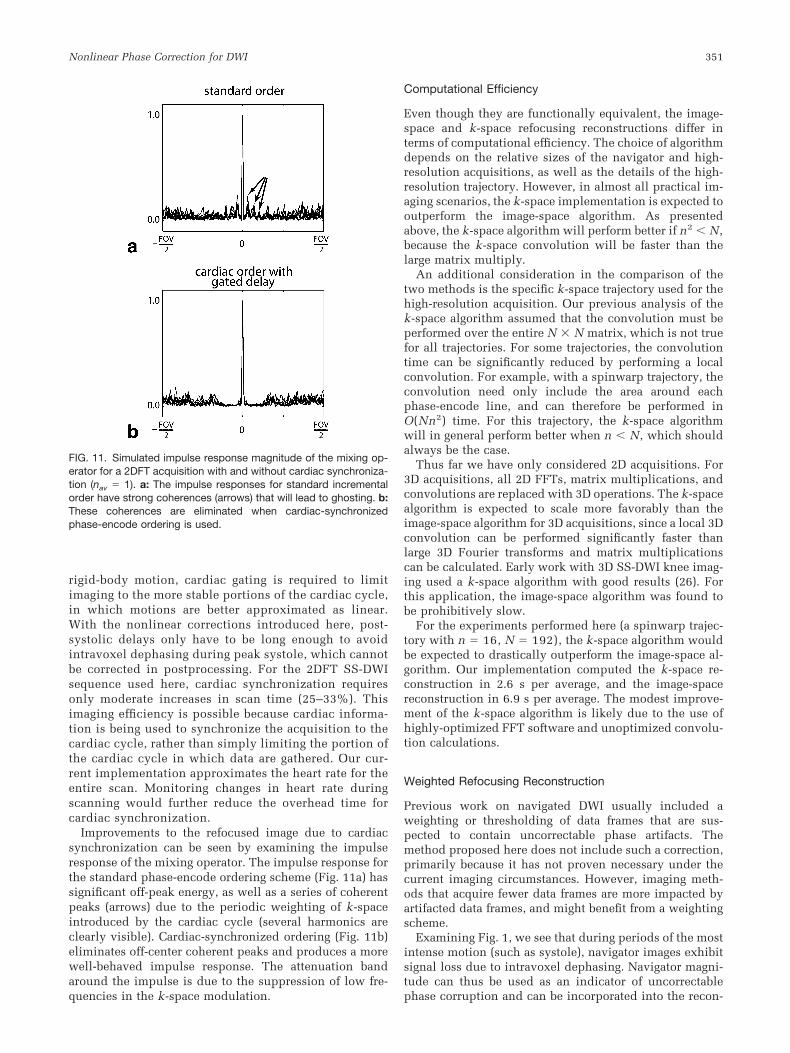
Improvements to the refocused image due to cardiacsynchronization can be seen by examining the impulseresponse of the mixing operator. The impulse response forthe standard phase-encode ordering scheme (Fig. 11a) hassignificant off-peak energy, as well as a series of coherentpeaks (arrows) due to the periodic weighting of k-spaceintroduced by the cardiac cycle (several harmonics areclearly visible). Cardiac-synchronized ordering (Fig. 11b)eliminates off-center coherent peaks and produces a morewell-behaved impulse response. The attenuation bandaround the impulse is due to the suppression of low fre-quencies in the k-space modulation.
Computational Efficiency
Even though they are functionally equivalent, the image-space and k-space refocusing reconstructions differ interms of computational efficiency. The choice of algorithmdepends on the relative sizes of the navigator and high-resolution acquisitions, as well as the details of the high-resolution trajectory. However, in almost all practical im-aging scenarios, the k-space implementation is expected tooutperform the image-space algorithm. As presentedabove, the k-space algorithm will perform better if n2 N,because the k-space convolution will be faster than thelarge matrix multiply.
An additional consideration in the comparison of thetwo methods is the specific k-space trajectory used for thehigh-resolution acquisition. Our previous analysis of thek-space algorithm assumed that the convolution must beperformed over the entire N � N matrix, which is not truefor all trajectories. For some trajectories, the convolutiontime can be significantly reduced by performing a localconvolution. For example, with a spinwarp trajectory, theconvolution need only include the area around eachphase-encode line, and can therefore be performed inO(Nn2) time. For this trajectory, the k-space algorithmwill in general perform better when n N, which shouldalways be the case.
Thus far we have only considered 2D acquisitions. For3D acquisitions, all 2D FFTs, matrix multiplications, andconvolutions are replaced with 3D operations. The k-spacealgorithm is expected to scale more favorably than theimage-space algorithm for 3D acquisitions, since a local 3Dconvolution can be performed significantly faster thanlarge 3D Fourier transforms and matrix multiplicationscan be calculated. Early work with 3D SS-DWI knee imag-ing used a k-space algorithm with good results (26). Forthis application, the image-space algorithm was found tobe prohibitively slow.
For the experiments performed here (a spinwarp trajec-tory with n � 16, N � 192), the k-space algorithm wouldbe expected to drastically outperform the image-space al-gorithm. Our implementation computed the k-space re-construction in 2.6 s per average, and the image-spacereconstruction in 6.9 s per average. The modest improve-ment of the k-space algorithm is likely due to the use ofhighly-optimized FFT software and unoptimized convolu-tion calculations.
Weighted Refocusing Reconstruction
Previous work on navigated DWI usually included aweighting or thresholding of data frames that are sus-pected to contain uncorrectable phase artifacts. Themethod proposed here does not include such a correction,primarily because it has not proven necessary under thecurrent imaging circumstances. However, imaging meth-ods that acquire fewer data frames are more impacted byartifacted data frames, and might benefit from a weightingscheme.
Examining Fig. 1, we see that during periods of the mostintense motion (such as systole), navigator images exhibitsignal loss due to intravoxel dephasing. Navigator magni-tude can thus be used as an indicator of uncorrectablephase corruption and can be incorporated into the recon-
FIG. 11. Simulated impulse response magnitude of the mixing op-erator for a 2DFT acquisition with and without cardiac synchroniza-tion (nav � 1). a: The impulse responses for standard incrementalorder have strong coherences (arrows) that will lead to ghosting. b:These coherences are eliminated when cardiac-synchronizedphase-encode ordering is used.
Nonlinear Phase Correction for DWI 351

struction. If we weight each image-space sample by itsnavigator magnitude prior to correction, the least-squaresestimate will be biased to more reliable data. This can beaccomplished by solving the preconditioned problem:
Qd � QRPm [4]
where Q is a preconditioning matrix that accomplishes thedesired image-space weighting. Note that preconditioningis applied to the problem in k-space.
The least-squares solution to Eq. [4] is:
m̂Q � �P*R*Q*QRP��1P*R*Q*Qd. [5]
The estimate in Eq. [5] filters the k-space data by Q*Q priorto refocusing. The magnitude effects of the filter are thenremoved by the unmixing matrix (P*R*Q*QRP)�1. Toweight each image-space voxel by the navigator magni-tude, Q*Q must convolve each high-resolution interleavewith the Fourier transform of the navigator magnitude. Inother words, R*Q*Qd should contain the interleave im-ages weighted by the navigator magnitude.
A weighted refocusing reconstruction can then be de-fined by approximating the mixing matrix P*R*Q*QRP asdiagonal by zeroing the off-diagonal elements. The approx-imated unmixing matrix removes the weighting caused bythe preconditioning, but does not attempt to remove anyaliasing. Regularization can be used to improve the stabil-ity of the inversion in noise regions with low signal.
Application to Other Sequences and Trajectories
The refocusing reconstruction will provide a good recon-struction of the data provided 1) a large number of excita-tions are acquired, and 2) k-space modulations induced bymotion are smooth and nonperiodic.
The requirement for many excitations minimizes alias-ing energy by allowing the incoherent phase errors tocancel. We have already discussed the improvement in therefocused image from averaging; other methods of increas-ing the number of excitations will have the same effect. Forexample, a 3D acquisition should be better-conditioned toa refocusing reconstruction than a 2D multislice acquisi-tion. Simply increasing the number of interleaves in anacquisition will also improve the refocused image. Theneed for a large number of excitations is a disadvantage forsome sequences, such as spin echo, which require longecho times. These methods may benefit from a weightedrefocusing reconstruction, which will tend to suppressthese errors, particularly if regularization is used.
The requirement for smooth and nonperiodic k-spacemodulations ensures that the refocusing operator will beable to remove phase corruptions. This requirement can beaddressed in most trajectories with cardiac synchroniza-tion. Some trajectories cannot simultaneously achievesmoothness and nonperiodicity, in which case we preferto meet the smoothness constraint since the refocusingreconstruction does a poor job of removing discontinui-ties. Spiral and radial scans can achieve a smooth k-spaceweighting by distributing the rotated interleaves from 0° to180° over each cardiac cycle (this scheme would result inazimuthal periodicity in k-space). Segmented EPI scanscan also be made smooth if we acquire each segment of a
single image at roughly the same portion of the cardiaccycle. The cardiac cycle could then be filled out by acquir-ing more slices (in multislice), more z-phase encodes (for3D), or more averages. All of these methods use cardiacinformation to achieve well-behaved modulations of thek-space data without requiring large increases in scantime.
CONCLUSIONS
We have presented a method for correcting nonlinearphase errors in diffusion-weighted imaging using 2D nav-igation. The refocusing reconstruction, which is an ap-proximation to the computationally-expensive least-squares estimate, is a straightforward algorithm that makescomplete use of the information in a 2D navigator. Theheart of the reconstruction is the refocusing operator,which rephases the unaliased component of each acquisi-tion via multiplication with the navigator phase conjugate.This reconstruction is a good approximation to the fullleast-squares estimate provided the phase errors causesmooth, nonperiodic modulations of k-space, and a suffi-cient number of excitations are acquired. Cardiac trigger-ing information can be used to achieve desirable modula-tions through ordering of data interleaves. The refocusingreconstruction is expected to be applicable in a wide rangeof imaging conditions.
APPENDIX A
Structure of Reconstruction Matrices
The motion-corrupted magnetization during the cth read-out is denoted as mc(r) � �mc(r)�ei�c(r). The phase corrup-tion during the cth excitation is expressed by the N2 � N2
matrix Pc:
Pc � �ei�c�r1� 0 · · · 0
0 ei�c�r2� · · · 0···
······
0 0 · · · ei�c�rN2��. [6]
Pcm is the phase-corrupted magnetization that is thesource of signal during the cth readout. Each of the Cinterleaves has a different phase corruption, representedby stacking the Pc’s to form P:
P � �P1
P2
···PC
�. [7]
P splits the magnetization vector m into C separate phase-corrupted magnetization vectors. These vectors arestacked to form the CN2 � 1 vector Pm representing thephase-corrupted magnetization that is sampled over thecourse of the experiment.
Each of the phase-corrupted magnetization vectors isseparately Fourier transformed by the matrix F (CN2 �CN2):
352 Miller and Pauly

F � �FN 0 · · · 0
0 FN · · · 0···
······
0 0 · · · FN�. [8]
F is composed of C 2DFT matrices FN (N2 � N2) consist-ing of the Fourier kernels:
FlmN � ei2�kl�rm. [9]
The product FPm is the CN2 � 1 vector representing the Cphase-corrupted spectra, sampled in Cartesian coordi-nates.
Finally, the spectra given by FPm are resampled onto thek-space sampling trajectories by the resampling matrix G(CR � CN2):
G � �G1 0 · · · 0
0 G2 · · · 0···
······
0 0 · · · GC�. [10]
Each submatrix Gc (R � N2) interpolates the Cartesiank-space points kl onto the sampling points for the cthreadout sm
c :
Glmc � sinc�kl � sm
c �. [11]
Note that for trajectories that collect data on Cartesiancoordinates (such as spinwarp or interleaved EPI), theelements of G are discrete delta functions.
APPENDIX B
Mixing Matrix
Using the notation of Appendix A, the elements of themixing matrix M for an arbitrary trajectory are:
Mlm � �c�1
C
ei��c�rm���c�rl�� �r�1
R ��n�1
N2
sinc�kn � src�e�i2�kn�rm�
� ��n�1
N2
sinc�kn � src�e�i2�kn�rl�. [12]
The summation over each readout r describes non-ideali-ties in the k-space trajectory that causes coupling betweenvoxels within a readout. The phase difference describesthe aliasing caused by motion-induced phase errors. Thesephase offsets are manifested as perturbations of the encod-ing functions used in the trajectory.
ACKNOWLEDGMENTS
K.M. thanks Dr. Brian Hargreaves for useful discussionsregarding the method and manuscript.
REFERENCES
1. Anderson AW, Gore JC. Analysis and correction of motion artifacts indiffusion weighted imaging. Magn Reson Med 1994;32:379–387.
2. Ordidge RJ, Helpern JA, Qing ZX, Knight RA, Nagesh V. Correction ofmotion artifacts in diffusion-weighted MR images using navigator ech-oes. Magn Reson Imaging 1994;12:455–460.
3. deCrespigny AJ, Marks MP, Enzmann DR, Moseley ME. Navigateddiffusion imaging of normal and ischemic human brain. Magn ResonMed 1995;33:720–728.
4. Butts K, Crespigny A, Pauly JM, Moseley M. Diffusion-weighted inter-leaved echo-planar imaging with a pair of orthogonal navigator echoes.Magn Reson Med 1996;35:763–770.
5. Mori S, van Zijl PCM. A motion correction scheme by twin-echo nav-igation for diffusion-weighted magnetic resonance imaging with mul-tiple RF echo acquisition. Magn Reson Med 1998;40:511–516.
6. Williams CFM, Redpath TW, Norris DG. A novel fast split-echo multi-shot diffusion-weighted MRI method using navigator echoes. MagnReson Med 1999;41:734–742.
7. Brockstedt S, Moore JR, Thomsen C, Holtas S, Stahlberg F. High-resolution diffusion imaging using phase-corrected segmented echo-planar imaging. Magn Reson Imaging 2000;18:649–657.
8. Clark CA, Barker GJ, Tofts PS. Improved reduction of motion artifacts indiffusion imaging using navigator echoes and velocity compensation. JMagn Reson 2000;142:358–363.
9. Norris DG, Driesel W. Online motion correction for diffusion-weightedimaging using navigator echoes: application to RARE imaging withoutsensitivity loss. Magn Reson Med 2001;45:729–733.
10. Bosak E, Harvey PR. Navigator motion correction of diffusion weighted3D SSFP imaging. MAGMA 2001;12:167–176.
11. Jiang H, Golay X, van Zijl PCM, Mori S. Origin and minimization ofresidual motion-related artifacts in navigator-corrected segmented dif-fusion-weighted EPI of the human brain. Magn Reson Med 2002;47:818–822.
12. Butts K, Pauly J, Crespigny A, Moseley M. Isotropic diffusion-weightedand spiral-navigated interleaved EPI for routine imaging of acutestroke. Magn Reson Med 1997;38:741–749.
13. Atkinson D, Porter DA, Hill DLG, Calamante F, Connelly A. Samplingand reconstruction effects due to motion in diffusion-weighted inter-leaved echo planar imaging. Magn Reson Med 2000;44:101–109.
14. Pipe JG, Farthing VG, Forbes KP. Multishot diffusion-weighted FSEusing PROPELLER MRI. Magn Reson Med 2002;47:42–52.
15. Norris DG. Implications of bulk motion for diffusion-weighted imagingexperiments: effects, mechanisms and solutions. J Magn Reson Imaging2001;13:486–495.
16. Enzmann DR, Pelc NJ. Brain motion: measurement with phase-contrastMR imaging. Radiology 1992;185:653–660.
17. Greitz D, Wirestam R, Franck A, Nordell B, Thomsen C, Stahlberg F.Pulsatile brain movement and associated hydrodynamics studied bymagnetic resonance phase imaging. Neuroradiology 1992;34:370–380.
18. Poncelet BP, Wedeen VJ, Weisskoff RM, Cohen MS. Brain parenchymamotion: measurement with cine echo-planar MR imaging. Radiology1992;185:645–651.
19. Buxton RB. The diffusion sensitivity of fast steady-state free precessionimaging. Magn Reson Med 1993;29:235–243.
20. Bailes DR, Gilderdale DJ, Bydder GM, Collins AG, Firmin DN. Respi-ratory ordered phase encoding (ROPE): a method for reducing respira-tory motion artifacts in MR imaging. J Comput Assist Tomogr 1985;9:835.
21. Haacke EM, Patrick JL. Reducing motion artifacts in two-dimensionalFourier transform imaging. Magn Reson Imaging 1986;4:359–376.
22. Frigo M, Johnson SG. FFTW: an adaptive software architecture for theFFT. Proc ICASSP 1998;3:1381–1384.
23. Basser PJ, Pierpaoli C. A simplified method to measure the diffusiontensor from seven MR images. Magn Reson Med 1998;39:928–934.
24. Miller KL, Meyer CH, Pauly JM. Self-navigated spirals for high resolu-tion steady-state diffusion imaging. In: Proceedings of the 10th AnnualMeeting of ISMRM, Honolulu, 2002.
25. Preussmann KP, Weiger M, Bornert P, Boesiger P. Advances in sensi-tivity encoding with arbitrary k-space trajectories. Magn Reson Med2001;46:638–651.
26. Miller KL, Hargreaves BA, Gold GE, Pauly JM. Navigated 3D steady-state diffusion imaging of knee cartilage. In: Proceedings of the 11thAnnual Meeting of ISMRM, Toronto, 2003.
Nonlinear Phase Correction for DWI 353