New solutions of LR fuzzy linear systems using ranking functions and ABS algorithms
13
New solutions of LR fuzzy linear systems using ranking functions and ABS algorithms Reza Ghanbari a , Nezam Mahdavi-Amiri b, * a Department of Mathematics, Ferdowsi University of Mashhad, Mashhad, Iran b Faculty of Mathematical Sciences, Sharif University of Technology, Tehran 11365-9415, Iran article info Article history: Received 26 November 2008 Received in revised form 2 February 2010 Accepted 12 February 2010 Available online 9 March 2010 Keywords: Fuzzy linear systems Fuzzy LR numbers Ranking functions ABS algorithms Parametric solutions abstract We propose an approach for computing the general compromised solution of an LR fuzzy linear system by use of a ranking function when the coefficient matrix is a crisp m n matrix. The solution is so that mean values of a compromised solution satisfies the corre- sponding crisp linear system. We show that if the corresponding crisp system is incompat- ible, then the fuzzy linear system lacks any solution. Otherwise, we solve a constrained least squares problem to compute a compromised solution. If the optimal value of the con- strained least squares problem is zero, then we obtain the LR solution, namely the exact solution, of the system with respect to a ranking function. On the other hand, if the optimal value of the constrained least squares problem is nonzero, then no exact solution exists and thus we introduce and compute approximate (or weak) solutions of the system with respect to a ranking function. Also, when the ranking function is a member of a certain class of ranking functions, we propose a class of algorithms, based on ABS class of algo- rithms, to compute the general compromised solution. Ó 2010 Elsevier Inc. All rights reserved. 1. Introduction Linear systems arise from many areas of science and engineering. Moore [1] mentioned that exact numerical data might be unrealistic, but uncertain data can consider more aspects of a real word problem. A natural way to describe uncertain data is using fuzzy data. Fuzzy linear systems under various assumption have been studied. Buckley et al. [2,3] studied square fuzzy linear sys- tems, Ax ¼ b, where the elements of A and b are fuzzy numbers. Since an algebraic solution does not exist, they proposed three other types of solutions (based on a-cuts, extension principal and interval arithmatic). Vorman et al. [4] improved Buckely and Qu’s [3] method by obtaining the necessary parametric functions needed for the solution of the systems corre- sponding to the bounds of considered a-level. Muzzioli and Reynaerts [5] provided a generalization of the vector solution proposed by Buckley and Qu [3] to the fuzzy system A 1 x þ b 1 ¼ A 2 x þ b 2 , where the elements of A 1 ; A 2 ; b 1 and b 2 are trian- gular fuzzy numbers and A 1 and A 2 are square matrices. They applied their method to solve and analyze a particular fuzzy linear system having financial applications [6]. A particular type of fuzzy linear systems is, A~ x ¼ ~ b; ð1Þ where the coefficient matrix A 2 R mn ; m 6 n, is crisp and ~ b m1 and ~ x n1 are fuzzy vectors. Many authors studied this type of fuzzy linear system under different hypotheses. Abramovich et al. [7] used a constrained least squares problem for solving 0307-904X/$ - see front matter Ó 2010 Elsevier Inc. All rights reserved. doi:10.1016/j.apm.2010.02.026 * Corresponding author. Tel.: +98 216165607; fax: +98 2166005117. E-mail addresses: [email protected] (R. Ghanbari), [email protected] (N. Mahdavi-Amiri). Applied Mathematical Modelling 34 (2010) 3363–3375 Contents lists available at ScienceDirect Applied Mathematical Modelling journal homepage: www.elsevier.com/locate/apm
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of New solutions of LR fuzzy linear systems using ranking functions and ABS algorithms

Applied Mathematical Modelling 34 (2010) 3363–3375
Contents lists available at ScienceDirect
Applied Mathematical Modelling
journal homepage: www.elsevier .com/locate /apm
New solutions of LR fuzzy linear systems using ranking functionsand ABS algorithms
Reza Ghanbari a, Nezam Mahdavi-Amiri b,*
a Department of Mathematics, Ferdowsi University of Mashhad, Mashhad, Iranb Faculty of Mathematical Sciences, Sharif University of Technology, Tehran 11365-9415, Iran
a r t i c l e i n f o a b s t r a c t
Article history:Received 26 November 2008Received in revised form 2 February 2010Accepted 12 February 2010Available online 9 March 2010
Keywords:Fuzzy linear systemsFuzzy LR numbersRanking functionsABS algorithmsParametric solutions
0307-904X/$ - see front matter � 2010 Elsevier Incdoi:10.1016/j.apm.2010.02.026
* Corresponding author. Tel.: +98 216165607; faxE-mail addresses: [email protected] (R. G
We propose an approach for computing the general compromised solution of an LR fuzzylinear system by use of a ranking function when the coefficient matrix is a crisp m� nmatrix. The solution is so that mean values of a compromised solution satisfies the corre-sponding crisp linear system. We show that if the corresponding crisp system is incompat-ible, then the fuzzy linear system lacks any solution. Otherwise, we solve a constrainedleast squares problem to compute a compromised solution. If the optimal value of the con-strained least squares problem is zero, then we obtain the LR solution, namely the exactsolution, of the system with respect to a ranking function. On the other hand, if the optimalvalue of the constrained least squares problem is nonzero, then no exact solution exists andthus we introduce and compute approximate (or weak) solutions of the system withrespect to a ranking function. Also, when the ranking function is a member of a certainclass of ranking functions, we propose a class of algorithms, based on ABS class of algo-rithms, to compute the general compromised solution.
� 2010 Elsevier Inc. All rights reserved.
1. Introduction
Linear systems arise from many areas of science and engineering. Moore [1] mentioned that exact numerical data mightbe unrealistic, but uncertain data can consider more aspects of a real word problem. A natural way to describe uncertain datais using fuzzy data.
Fuzzy linear systems under various assumption have been studied. Buckley et al. [2,3] studied square fuzzy linear sys-tems, Ax ¼ b, where the elements of A and b are fuzzy numbers. Since an algebraic solution does not exist, they proposedthree other types of solutions (based on a-cuts, extension principal and interval arithmatic). Vorman et al. [4] improvedBuckely and Qu’s [3] method by obtaining the necessary parametric functions needed for the solution of the systems corre-sponding to the bounds of considered a-level. Muzzioli and Reynaerts [5] provided a generalization of the vector solutionproposed by Buckley and Qu [3] to the fuzzy system A1xþ b1 ¼ A2xþ b2, where the elements of A1;A2; b1 and b2 are trian-gular fuzzy numbers and A1 and A2 are square matrices. They applied their method to solve and analyze a particular fuzzylinear system having financial applications [6].
A particular type of fuzzy linear systems is,
A~x ¼ ~b; ð1Þ
where the coefficient matrix A 2 Rm�n; m 6 n, is crisp and ~bm�1 and ~xn�1 are fuzzy vectors. Many authors studied this type offuzzy linear system under different hypotheses. Abramovich et al. [7] used a constrained least squares problem for solving
. All rights reserved.
: +98 2166005117.hanbari), [email protected] (N. Mahdavi-Amiri).

3364 R. Ghanbari, N. Mahdavi-Amiri / Applied Mathematical Modelling 34 (2010) 3363–3375
(1) when A is a square matrix and the elements are special fuzzy LR numbers. Mishmast-Nehi et al. [8] provided a canonicalform of solution when ~x and ~b are triangular fuzzy vectors. In [7,8], authors considered special types of fuzzy LR numbers andvariables in a square fuzzy system, restrictions that we will later remove and propose an approach for solving the generalrectangular fuzzy LR linear systems with general form of LR fuzzy numbers and variables.
Friedman et al. [9,10] used an embedding method for solving (1), where A in (1) is a nonsingular matrix. They first trans-formed the n� n fuzzy linear system to a 2n� 2n crisp linear system. Then, they solved the 2n� 2n crisp linear system usingthe inverse matrix, and subsequently checked whether the corresponding solution of the crisp system is a fuzzy vector. If thesolution was a fuzzy vector, they called it a strong solution. Otherwise, they considered a compromised solution of the fuzzylinear system constructed form the solution of the crisp system. They called this compromised solution a weak solution.Based on the work of Friedman et al. [9,10], Ma et al. [11] analyzed the duality for square fuzzy linear systems. Also, basedon ideas of Friedman et al. [9,10], several numerical method have been proposed for solving (1) in [12–14], when A is a crispmatrix. We note that in [9–14], ~x is computed first by using the inverse or generalized inverse of a corresponding matrix, andthen it is checked whether ~x is a fuzzy vector. When ~x is not a fuzzy vector, then an extra computation is needed to constructa corresponding weak solution using ~x. Our approach here is different, however. We first define a new notion of solution byuse of a ranking function. We then construct a least squares model to characterize the solution of the system. We will showthat if the minimal value of the corresponding least squares problem is zero, then we have an exact solution (we name it acompromised solution); otherwise, we have an approximate compromised solution. We emphasize that in our approachthere is no need to check whether a solution is fuzzy, as required by the approaches in [9–14], and thus no need for the extracomputation.
In our recent alternative approach [15] (see also [16]), we presented a methodology for computing the general solution of(1), where ~x and ~b are LR fuzzy vectors. we transformed the fuzzy linear system to a crisp linear system and a constrainedleast squares problem. We showed that if the crisp system were incompatible, then the fuzzy linear system lacked any solu-tion. Otherwise, if the optimal value of the constrained least squares problem were zero, then we obtained the LR solution,namely the exact solution, of the fuzzy linear system. On the other hand, if the optimal value of the constrained least squaresproblem were nonzero, then no exact solution existed and thus we introduced and computed a compromised solution of thesystem, namely the approximate solution. We proposed an algorithm based on ABS algorithms [17–20] to compute the solu-tion (exact or approximate). Our proposed algorithm can also be used to solve the dual fuzzy linear systems discussed in[11].
Also, in [2,3,5–7,9,10,15], authors have considered solutions, namely exact solution, strong solution or algebraic solution,satisfying the algebraic equations exactly. They have provided several methods to compute the strong or exact solutions,when they exist. But, in practice, it is rare for a fuzzy linear system to have a strong or exact solution (especially whenm ¼ n). Therefore, authors try to define a proper compromised solution, when the fuzzy linear system lacks a strong or exactsolution (see [3,5,10,15]).
Here, we first introduce the use of a ranking function to define a compromised solution for (1), and then propose a meth-odology, based on ABS class of algorithms [17–20], for computing the solution using certain ranking functions.
Consider,
A~x¼R~b; ð2Þ
where R is a ranking function, the coefficient matrix A 2 Rm�n; m 6 n, is crisp and ~bm�1 and ~xn�1 are LR fuzzy vectors. Wedefine a solution of (2) as a compromised solution for (1).
The system (2) is attractive due to the following reasons:
� A~x and ~b being vague, the exact equality between the two may be improper. Use of a ranking function, however, can jus-tify the imposition of equality (see [21–24]) and provide a basis for a proper comparison of A~x and ~b. We know that A~xequals ~b with respect to a ranking function R, if and only if RðaT
i~xÞ ¼ Rð~biÞ, for i ¼ 1; . . . ;m, where aT
i is ith row of A and ~bi
is ith component of ~b. Therefore, a solution ~x, an LR fuzzy vector, satisfying (2) may serve to be as an interesting compro-mised solution for (1).� In the embedding method (see [15,16]), the types of L and R are not important. In other words, properties of L and R do not
play any role in the definition and computation of a solution (especially when a strong or exact solution does not exist).But, by a ranking function, we can consider LR fuzzy number types to reduce the computational complexity. Indeed, lateron, we will show that if we use a ranking function based on the centroid point (see [22–25]), then we can solve (2) bysolving two m� n crisp linear systems. We apply an ABS algorithm (see [17–20]) to solve these two systems simulta-neously. This way, we have an efficient solution method for solving both systems as the search vectors are determinedin the ABS algorithm.� We will see that the solutions of (2) are computed more efficiently as compared to our recent alternative approach in [15]
(see also [16]).
In Section 2, we provide the necessary definitions, some properties of fuzzy arithmetic and basic aspects of ABS algo-rithms. We discuss solving (2) in Section 3. In Section 4, we propose an algorithm, based on ABS algorithms, to solve (2)for certain special ranking functions and LR fuzzy numbers. We conclude in Section 5.

R. Ghanbari, N. Mahdavi-Amiri / Applied Mathematical Modelling 34 (2010) 3363–3375 3365
2. Preliminaries
Here, we give some basic definitions and results concerning fuzzy numbers in Section 2.1, followed by a brief descriptionof basic steps of the ABS algorithms, to be used in our proposed algorithm for solving (2) with respect to certain ranking func-tions, in Section 2.2.
2.1. Fuzzy numbers
A fuzzy number is a fuzzy quantity A (see [26]) that represents a generalization of a real number r. Intuitively,lAðxÞ should be a measure of how well lAðxÞ ‘‘approximates” r, and certainly one reasonable requirement is thatlAðrÞ ¼ 1 [26].
Definition 1 [26]. A fuzzy number is a fuzzy quantity A that satisfies the following conditions:
(1) lAðxÞ ¼ 1 for exactly one x.(2) The support fx : lAðxÞ > 0g of A is bounded.(3) The a-cuts of A are closed intervals.
Remark 2. There are several other definitions for fuzzy number in the literature (see [27]) which differ from the abovedefinition.
Proposition 3. The followings hold [26]:
(1) Real numbers are fuzzy numbers.(2) A fuzzy number is a convex fuzzy quantity.(3) A fuzzy number is upper semicontinuous.(4) If A is a fuzzy number with lAðrÞ ¼ 1, then lA is nondecreasing on ð�1; r�. and nonincreasing on ðr;1�.
Theorem 4 [26]. If A and B are fuzzy numbers, then so are Aþ B and �A, with Aþ B and �A as defined in [26].
Definition 5 [28]. The decreasing map L : Rþ ! ½0;1� is called a shape function if the followings hold:
Lð0Þ ¼ 1;
Lð1Þ ¼ 0;
0 < LðxÞ < 1; x – 0;1:
8>>><>>>:
Definition 6. A fuzzy number eA is of LR-type if there exist shape functions L (for left), R (for right) and scalars a > 0; b > 0withleAðxÞ ¼L a�x
a
� �; x 6 a;
R x�ab
� �; x P a:
8><>:
The mean value of eA; a, is a real number, and a; b are called the left and right spreads, respectively. eA is denoted by ða;a; bÞLR.Definition 7. A fuzzy number eA ¼ ðm;a;aÞLL is a symmetric fuzzy number.
Remark 8. According to Definition 1, throughout the paper, we assume that all the supports of LR-type fuzzy numbers arebounded.
Note that there are many candidates for a shape function; for example, maxð0;1� xÞp and maxð0;1� xpÞ, where p > 0.
Definition 9. eM ¼ ðm;a; bÞLR is a triangular fuzzy number if L ¼ R ¼maxð0;1� xÞ.
Theorem 10 [27]. Let eM ¼ ðm;a; bÞLR, eN ¼ ðn; c; dÞLR and k 2 Rþ. Then,
(1) k eM ¼ ðkm; ka; kbÞLR.(2) � eM ¼ ð�m; b;aÞLR.(3) eM � eN ¼ ðmþ n;aþ c; bþ dÞLR.
Note 1 Here, we denote the set of LR fuzzy numbers by FðR1ÞLR.

3366 R. Ghanbari, N. Mahdavi-Amiri / Applied Mathematical Modelling 34 (2010) 3363–3375
Definition 11. A vector ~x ¼ ð~x1; ~x2; . . . ; ~xnÞT , denoted by ~x 2 FðRnÞLR, is called a fuzzy vector, where ~xi 2 FðR1ÞLR; i ¼ 1; . . . ;n.
2.2. Basic ABS algorithms
ABS methods, in their general forms, have been first developed by Abaffy et al. [17]. The ABS class of methods containsdirect iterative methods for computing the general solution of (3). ABS methods comprise a large class of methods that areused for solving linear algebraic systems, nonlinear algebraic equations, linear least squares problems, optimization prob-lems and Diophantine equations (see [18–20,29,30]). Consider the system of linear equations,
Ax ¼ b; ð3Þ
where A 2 Rm�n; b 2 Rm and rankðAÞ ¼ m. Let A ¼ ða1; . . . ; amÞT ; ai 2 Rn; i ¼ 1; . . . ;m and b ¼ ðb1; . . . ; bmÞT . Also, letAi ¼ ða1; . . . ; aiÞ and bðiÞ ¼ ðb1; . . . ; biÞT . The ABS approach can be considered as a projection or a null space method (see [18]).
Assume x1 2 Rn arbitrary and H1 2 Rn�n, Spedicato’s parameter, arbitrary and nonsingular. Note that for any x 2 Rn we canwrite x ¼ x1 þ HT
1q for some q 2 Rn. In the beginning of the ith iteration, i P 1, the general solution of the first i� 1 equationis at hand. We realize that if xi is a solution for the first i� 1 equations and if Hi 2 Rn�n, with rankðHiÞ ¼ n� iþ 1, is so thatthe columns of HT
i span the null space of ATi�1, then
x ¼ xi þ HiqT ;
with arbitrary q 2 Rn, forms the general solution of the first i� 1 equations. That is, with
HiAi ¼ 0;
we have,
ATi�1x ¼ bði�1Þ
:
Now, since rankðHiÞ ¼ n� iþ 1 and HTi is a spanning matrix for nullðAT
i Þ by assumption (one that is trivially valid for i ¼ 1),then letting
pi ¼ HTi zi;
with arbitrary zi 2 Rn, Broyden’s parameter, we have ATi�1pi ¼ 0 and
xðaÞ ¼ xi � api;
for any scalar a, solves the first i� 1 equations. We can set a ¼ ai so that xiþ1 ¼ xðaiÞ solves the ith equation as well. If we let
ai ¼aT
i xi � bi
aTi pi
;
with the assumption aTi pi – 0, then
xiþ1 ¼ xi � aipi
is a solution for the first i equations. Now, to complete the ABS step, Hi must be updated to Hiþ1 so that Hiþ1Ai ¼ 0. It willsuffice to let
Hiþ1 ¼ Hi � uivTi ð4Þ
and select ui and v i so that Hiþ1aj ¼ 0; j ¼ 1; . . . ; i. The updating formula (4) for Hi is a rank-one correction to Hi. The matrix Hi
is generally known as the Abaffian. The ABS methods usually use ui ¼ Hiai and v i ¼ HTi wi=wT
i Hiai, where wi, Abaffy’s param-eter, is an arbitrary vector satisfying
wTi Hiai – 0:
Thus, the updating formula can be written as:
Hiþ1 ¼ Hi �HiaiwT
i Hi
wTi Hiai
:
We now give the general steps of an ABS algorithm [17,18]. We have given the steps of the algorithms, since, later on, wemake specific use of the results obtained to propose our new algorithm in Section 4. Below, riþ1 denotes the rank of Ai
and hence the rank of Hiþ1 equals n� riþ1.
Algorithm 1. ABS Algorithm
Step 1: Choose x1 2 Rn, arbitrary, and H1 2 Rn�n, arbitrary and nonsingular. Set i ¼ 1, r1 ¼ 0.Step 2: Compute si ¼ aT
i xi � bi and si ¼ Hiai.

R. Ghanbari, N. Mahdavi-Amiri / Applied Mathematical Modelling 34 (2010) 3363–3375 3367
Step 3: If ðsi ¼ 0 and si ¼ 0Þ then let xiþ1 ¼ xi, Hiþ1 ¼ Hi, riþ1 ¼ ri and go to Step 7 (the ith equation is redundant). If ðsi ¼ 0and si – 0Þ then Stop (the ith equation and hence the system is incompatible).
Step 4: fsi – 0g Compute the search direction pi ¼ HTi zi, where zi 2 Rn is an arbitrary vector satisfying zT
i Hiai ¼ zTi si – 0.
Compute ai ¼ si=aTi pi and let xiþ1 ¼ xi � aipi.
Step 5: Update Hi to Hiþ1 by:
Hiþ1 ¼ Hi �HiaiwT
i Hi
wTi Hiai
;
where wi 2 Rn is an arbitrary vector satisfying wTi si – 0.
Step 6: Let riþ1 ¼ ri þ 1.Step 7: If i ¼ m then Stop ðxmþ1 is a solution) else let i ¼ iþ 1 and go to Step 2.
We note that after completion of the algorithm, the general solution of (3), if compatible, is written as x ¼ xmþ1 þ HTmþ1q,
where q 2 Rn is arbitrary. Below, we list certain properties of the ABS methods [18].
� If a1; . . . ; ai are linearly independent then the direction search vectors p1; . . . ; pi are linearly independent, and the set ofdirections p1; . . . ; pi together with independent columns of HT
iþ1 form a basis for Rn.� Hiai – 0 if and only if ai is linearly independent of a1; . . . ; ai�1. Equivalently, Hiai ¼ 0 if and only if ai is linearly dependent
of a1; . . . ; ai�1 (this result serves the basis the decisions made in Step 3 above).� RankðHiþ1Þ ¼ n� riþ1, where riþ1 ¼ rankðAiÞ.� Since rankðAÞ ¼ rmþ1, then the general solution of (3) is written as x ¼ xmþ1 þ HT q, where HT
n�ðn�rmþ1Þ is a matrix withn� rmþ1 independent columns and q 2 Rn�rmþ1 is arbitrary. Note that since wT
i Hiþ1 ¼ 0, then any row of Hiþ1 correspondingto a nonzero component of wi is a dependent row and can be removed in Step 5. The matrix H is the final Abaffianobtained by removal of a dependent row at every step.� The Huang’s algorithm [18] is a special ABS algorithm with H1 ¼ I in Step 1, zi ¼ ai in Step 4, and wi ¼ ai=aT
i Hiai in Step 5.If, in addition, we let x1 ¼ ka1 where k is a scalar, then the sequence of iterates x2; . . . ; xmþ1 generated by Algorithm 1 hasthe minimal Euclidean norm amongst all solutions of the corresponding subsystems [18]. Also, we have the same prop-erty when we use Algorithm 1 by setting H1 ¼ I in Step 1, zi ¼ Hiai in Step 4, wi ¼ zi=zT
i zi in Step 5 (resulting in the mod-ified Huang’s Algorithm; see [18]) and x1 ¼ ka1 where k is a scalar. It is shown that the modified Huang’s algorithm ismore stable numerically than Huang’s algorithm [18].
3. Ranking functions in fuzzy LR linear systems
In many applications, fuzzy LR numbers are used in fuzzy models, because the use of these numbers increase computa-tional efficiency without limiting the generality beyond acceptable limits [27]. Thus, we focus on solving fuzzy LR systems byuse of ranking functions. Consider A~x, where A 2 Rm�n; m 6 n, is crisp and ~xn�1 is an LR fuzzy vector. Let ~x ¼ ð~x1; . . . ; ~xnÞT , andaT
i be the ith row of A. We can represent A~x in the form,
ðA~xÞi ¼ aTi~x
� �; i ¼ 1; . . . ;m:
Let B�i ¼ fj : aij < 0g and Bþi ¼ fj : aij P 0g. Then, we have,
ðA~xÞi ¼Xj2B�i
aij~xj þXj2Bþ
i
aij~xj
24 35; i ¼ 1; . . . ;m: ð5Þ
Let ~xj ¼ ðxj;aj; bjÞLR. Then, from Theorem 10, we obtain,
ðA~xÞi ¼Xj2Bþ
i
aijxj þXj2B�i
aijxj;Xj2Bþ
i
aijaj �Xj2B�i
aijbj;Xj2Bþ
i
aijbj �Xj2B�i
aijaj
0@ 1ALR
24 35; i ¼ 1; . . . ;m: ð6Þ
Consider the given LR fuzzy vector ~b ¼ ð~b1; . . . ; ~bmÞT ; ~bi ¼ ðbi; bli; b
ri ÞLR for the right hand side of (1). Using (6), we can write the
system (1) by
aTi x;Xj2Bþi
aijaj �Xj2B�i
aijbj;Xj2Bþi
aijbj �Xj2B�i
aijaj
0@ 1ALR
¼ bi; bli; b
ri
� �LR; i ¼ 1; . . . ;m; ð7Þ
where x ¼ ðx1; . . . ; xnÞT . Suppose A~x ¼ ~b has a solution. Then, the corresponding mean values of solution must lie in the fol-lowing crisp linear system,
Ax ¼ b; ð8Þ

3368 R. Ghanbari, N. Mahdavi-Amiri / Applied Mathematical Modelling 34 (2010) 3363–3375
where b ¼ ðb1; . . . ; bmÞT . We now define ~x to be a solution of (2) with respect to a ranking function, R, when ~x satisfies thesystem R aT
i~x
� �¼ Rð~biÞ, for i ¼ 1; . . . ;m and x, the corresponding vector of mean values of ~x, is a solution of the crisp linear
system (8). The following gives a definition of solution for (2) using the above notation.
Definition 12. We call ~x in FðRnÞLR a solution of A~x¼R~b with respect to the ranking function R if and only if we have,
Ax ¼ b;
aTi~x¼R
~bi; i ¼ 1; . . . ;m:
8<: ð9Þ
Note that, the crisp linear system in (9) guarantees that the mean values of a solution of (2) with respect to R, is a solutionof (8). The following proposition relates the solutions of (1) and (2).
Proposition 13. If ~x is a solution of A~x ¼ ~b, then ~x is a solution of A~x¼R~b, where R is a ranking function. Equivalently, if the system
A~x¼R~b lacks a solution, then A~x ¼ ~b lacks a solution.
Proof. The proof is straightforward. h
Similar to [15,16], we aim to find an LR fuzzy vector, ~x, such that the vector RðA~xÞ has the least distance from Rð~bÞ inEuclidean norm and the mean value of ~x satisfies the crisp linear system (8). Therefore, from Definition 6 and using the abovenotations, we define the following constrained least squares problem:
minPmi¼1
R aTi~x
� ��Rð~biÞ
� �2;
s:t: Ax ¼ b;
a ¼ ða1; . . . ;anÞT > 0; b ¼ ðb1; . . . ;bnÞT> 0:
8>>>><>>>>: ð10Þ
Remark 14. Constrains a > 0 and b > 0 are the impositions due to ~x being an LR fuzzy vector (see Definition 6).
Remark 15. For the above optimization problem, we may consider the numbers aj; bj for j ¼ 1; . . . ; n to have small positivevalues (e.g., 10�20). In this case, the fuzzy numbers ðxj;aj; bjÞ
TLR are very close to the crisp numbers xj. Thus, the user can define
a positive parameter, e, such that aj; bj P e for all j. By this setting, it is guaranteed that each fuzzy number has left and rightspreads as much as e (see Definition 6). Also, suppose the user wants to impose aj; bj 6 Mj or decides to have some LR fuzzynumbers to be approximately symmetric, then the user adjoins appropriate constraints to the constrained least squaresproblem (10); e.g., jaj � bjj 6 10�k for some j, j 2 f1; . . . ;ng. Other constraints can also be interesting. Assume the user wantsthe measure of fuzziness of some fuzzy numbers to be smaller than certain predefined positive numbers Nj. In this case, theuser adds aj þ bj 6 Nj to the constrained least squares problem (10). So, one can change the above constrained least squaresproblem to:
minPmi¼1
R aTi~x
� ��Rð~biÞ
� �2;
s:t: Ax ¼ b;
a ¼ ða1; . . . ;anÞT P ee; b ¼ ðb1; . . . ;bnÞT P ee; a;b 2 C:
8>>>><>>>>: ð11Þ
where e ¼ ð1; . . . ;1ÞT and C is the feasible space defined by user’s specified conditions.Let z� be the optimal value of (10) or (11). If z� – 0, then it is apparent that the system (2) lacks a solution. In this case, let,
Sw ¼ ~y : ~y 2 FðRnÞLR; ~y a solution ofð10Þ or ð11Þ�
: ð12Þ
Then, we define a compromised solution, namely approximate solution, for the system (2) as follows.
Definition 16. We say that ~y is a approximate solution of (2) if ~y 2 Sw, with Sw as defined by (12).
If z� ¼ 0, then the system (2) has a solution. We call this solution as an exact solution. We redefine a solution of (2) as follow.
Definition 17. We say that ~y is an exact solution of (2) if ~y 2 Ss, where,
Ss ¼ ~y : ~y 2 FðRnÞLR; ~y a solution ofð10Þ or ð11Þwith z� ¼ 0�
:
It is obvious that Definitions 17 and 12 are equivalent.
Remark 18. The constrained least squares problem (10) or (11) may have more than one exact or approximate solutions(e.g., when m is smaller than n). In such cases, the user may be interested in a particular solution by the imposition of some

R. Ghanbari, N. Mahdavi-Amiri / Applied Mathematical Modelling 34 (2010) 3363–3375 3369
constrains in (11). An interesting solution is one with the least Euclidean norm in the solution space (this solution is unique;see [31]). This solution has the least Euclidean norm of mean values and minimizes the value of kak2
2 þ kbk22:
It is obvious, that the solution of (10) or (11) depends on the choice of R. Next, we consider the ranking function intro-duced by Cheng [21].
3.1. Illustrating Cheng’s ranking function
For an illustration of the above discussion, we give an example using the ranking function introduced by Cheng [21].Cheng’s ranking function is based on the centroid point (other ranking function based on centroid point can be found in[24,32]). Suppose that the fuzzy number ~x ¼ ðx;a; bÞLR is defined by the membership function,
1 In t
f~x ¼f L~x ðyÞ; x� a 6 y 6 x;
f R~x ðyÞ; x 6 y 6 xþ b;
0; O:W :;
8><>: ð13Þ
where f L~x ðyÞ ¼ L x�y
a
� �; f R
~x ðyÞ ¼ R y�xb
� �, L and R are shape functions (see Definition 5). We denote the inverse function of f L
~x and f R~x
by gL~x and gR
~x , respectively. Now let,
�x0 ¼R x
x�a tf L~xðtÞdt þ
R xþbx tf R
~x ðtÞdtR xx�a f L
~x ðtÞdt þR xþb
x f R~x ðtÞdt
; ð14Þ
�y0 ¼R 1
0 tgL~xðtÞdt þ
R 10 tgR
~x ðtÞdtR 10 gL
~xðtÞdt þR 1
0 gR~x ðtÞdt
; ð15Þ
and define Rð~xÞ ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi�x2
0 þ �y20
q, as the ranking value defined by Cheng [21]. Cheng argues through some examples that the above
ranking function is more effective than other ranking functions based on the centroid point [24,32].Before continuing our discussion, we provide some properties of Cheng’s ranking function. Let ~x ¼ ðx;a; bÞLR and
L ¼ R ¼ maxð0;1� xpÞ. Then,
f L~x ðtÞ ¼ 1� ðx� t
aÞp; f R
~x ðtÞ ¼ 1� ðt � xbÞp;
gL~xðtÞ ¼ x� a
ffiffiffiffiffiffiffiffiffiffiffi1� tpp
; gR~x ðtÞ ¼ xþ b
ffiffiffiffiffiffiffiffiffiffiffi1� tpp
:
Lemma 19. Consider ~x ¼ ðx;a; bÞLR and L ¼ R ¼ maxð0;1� xpÞin Definition 6. Then, (14) and (15) turn to:
�x0 ¼ xþ 1pþ 2
ðb� aÞ; ð16Þ
�y0 ¼1
2pþ 1ðpþ 1Þð2pþ 1Þxþ ðb� aÞp2
2ðpþ 1Þxþ ðb� aÞp
� �: ð17Þ
Proof. The proof is straightforward. h
Now, consider the following fuzzy linear system, adapted from [10],
~x1 þ ~x2 � ~x3 ¼ ð1;1;1ÞLR;
~x1 � 2~x2 þ ~x3 ¼ ð3;1;7ÞLR;
2~x1 þ ~x2 þ 3~x3 ¼ ð�2;10;1ÞLR;
8<: ð18Þ
where L ¼ R ¼ maxð0;1� xÞ. This example comes from [10] with a little change in the fuzzy numbers to satisfy Definition 6.Friedman et al. [10] showed that this fuzzy linear system lacks a strong solution (algebraic solution). Using the method pro-posed by Friedman et al. [10], we obtain,
~xF ¼
1713 ;
10313 ;
11813
� �LR
� 1813 ;
1613 ;
1513
� �LR
� 1413 ;
10113 ;
6813
� �LR
264375;
as a weak solution (as proposed).Now, we apply our method using Chang’s ranking function. For each ðA~xÞi, based on (6) and Lemma 19, we can simplify
(16) and (17) to have the following forms1:
his example, p = 1 in Lemma 19.

3370 R. Ghanbari, N. Mahdavi-Amiri / Applied Mathematical Modelling 34 (2010) 3363–3375
�xi0 ¼ aTi xþ 1
3ðb� aÞ
� �; ð19Þ
�yi0 ¼13
aTi ð6xþ ðb� aÞÞ
aTi ð4xþ ðb� aÞÞ
� �; ð20Þ
where a ¼ ða1; . . . ;anÞT and b ¼ ðb1; . . . ; bnÞT . Here, using the ranking function of Cheng [21], we must solve:
minPmi¼1
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi�xi
20 þ �yi
20
q�Rð~biÞ
� �2;
s:t: Ax ¼ b;
a ¼ ða1; . . . ;anÞT > 0; b ¼ ðb1; . . . ;bnÞT> 0;
8>>><>>>: ð21Þ
where �xi0 and �yi0 are as defined in (19) and (20), respectively. The optimization problem in (21) contain 3n variables ðx; a,and bÞ and mþ 2n constraints. We can simplify (21) as follows. Let w ¼ b� a. Then, (19) and (20) turn to:
�xi0 ¼ aTi ðxþ
13
wÞ; ð22Þ
�yi0 ¼13
aTi ð6xþwÞ
aTi ð4xþwÞ
� �: ð23Þ
Since it is required that a > 0 and b > 0, then w is a free vector. Therefore, the optimization problem (21) is simplified to:
minPmi¼1
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi�xi
20 þ �yi
20
q�Rð~biÞ
� �2;
s:t: Ax ¼ b;
8><>: ð24Þ
where �xi0 and �yi0 are defined in (22) and (23), respectively.Note that in above optimization problem we omitted the constraints a > 0 and b > 0 by defining w ¼ b� a in (21), be-
cause with the new definition w is a free vector (all elements of w can be positive or negative). The optimization problem(24) has 2n free variables (x and w) and m constrains. Thus, solving the optimization problem (24) is more convenient than(21) with 3n variables and mþ 2n constraints. After solving (24), based on the definition of LR fuzzy numbers, to haveai; bi > 0 for i ¼ 1; . . . ;n, we must set ai > 0 and bi ¼ ai þwi > 0 such that bi � ai ¼ wi.
We solved (24) using LINGO 8 software package whit the analytical derivatives and SLP directions options in the nonlin-ear solver set to be on. The optimal solution of (24) is obtained to be x1 ¼ 1:307692; x2 ¼ �1:384615; x3 ¼ �1:076923;w1 ¼ �0:5418871;w2 ¼ �3:934555 and w3 ¼ �1:327223 with the optimal value, z�, equal to zero. Thus,
~xg ¼ð1:307692;a1;b1ÞLR
ð�1:384615;a2;b2ÞLR
ð�1:076923;a3;b3ÞLR
264375
is the general form of the exact solution with respect to Chang’s ranking function, where ai > 0 and bi ¼ wi þ ai > 0 fori ¼ 1; . . . ;n. According to Remark 18, we select the unique exact solution that has ai; bi P 0:1 and has the minimum valueof kak2
2 þ kbk22, The unique exact solution under the above constraints is:
~xour ¼ð1:307692;0:6418871; 0:1ÞLR
ð�1:384615;4:034555;0:1ÞLR
ð�1:076923;1:327223;0:1ÞLR
264375:
For a comparison between Friedman et al.’s obtained solution, ~xF , and our computed solution, ~xour , we used a distancefunction to measure the closeness of the vectors A~xF and A~xour to ~b. We used the Ming et al.’s [33] metric proposed for tri-angular fuzzy numbers. If ~x ¼ ðx;ax; bxÞLR and ~y ¼ ðy;ay; byÞLR are two triangular fuzzy numbers, then Ming et al. [33] intro-duced the distance function,
D22ð~x; ~yÞ ¼
12
4ðx� yÞ2 þ ðay � axÞ2 þ ðby � bxÞ2
� �þ ðx� yÞ by þ ay � bx � ax
� �ð25Þ
and for two LR fuzzy vectors ~x ¼ ð~x1; . . . ; ~xnÞT and ~y ¼ ð~y1; . . . ; ~ynÞT defined the distance between ~x and ~y to be,
D2nð~x; ~yÞ ¼
Xn
i¼1
D22ð~xi; ~yiÞ: ð26Þ

R. Ghanbari, N. Mahdavi-Amiri / Applied Mathematical Modelling 34 (2010) 3363–3375 3371
Using (26), we obtained DnðA~xF ;~bÞ ¼ 41:6413, and DnðA~xour;
~bÞ ¼ 3:0163. Thus, it is evident that our solution is much clo-ser to ~b (with ~b as given in (18)) than the solution obtained by Friedman et al.’s method.
4. Special class of ranking functions and LR fuzzy numbers
Here, we intend to give an algorithm to solve the system (2) through an extended version of ranking functions used forseveral fuzzy problems.
Suppose that ~x ¼ ðx;a; bÞLR be an LR fuzzy number and L ¼ R ¼ maxð0;1� xpÞ in Definition 6. Then, based on Lemma 19,Yager’s [24] ranking function on ~x is:
Rð~xÞ ¼ xþ 1pþ 2
ðb� aÞ: ð27Þ
Other ranking functions have also been used when L ¼ R ¼ maxð0;1� xÞ in Definition 6. For example, Maleki et al. [25],based on [34], adopted the ranking function,
Rð~xÞ ¼ xþ 12ðb� aÞ ð28Þ
and Mahdavi-Amiri and Nasseri [22,23] made use of the ranking function,
Rð~xÞ ¼ xþ 14ðb� aÞ ð29Þ
and presented some duality results for a fuzzy linear programming problem (see also [34] for a discussion of fuzzy rankingfunctions). Here, we consider an extension of (27)–(29) as:
Rð~xÞ ¼ kxþ cðb� aÞ; ð30Þ
where c 2 ð0;1Þ, and k 2 Rþ.From (7) and using similar notation as in (7), we can represent A~x¼R
~b by,
kXn
j¼1
aijxj þ cXj2Bþ
i
aijðbj � ajÞ þXj2B�i
aijðbj � ajÞ
0@ 1A ¼ kbi þ cðbri � bl
iÞ; i ¼ 1; . . . ;m; ð31Þ
where R is defined as in (30), B�i ¼ fj : aij < 0g and Bþi ¼ fj : aij P 0g.According to Definition 12, to have Ax ¼ b or equivalently
Pnj¼1aijxj ¼ bi, the equations (31) turn to:
Ax ¼ b;Pj2Bþ
i
aijðbj � ajÞ þP
j2B�i
aijðbj � ajÞ ¼ bri � bl
i; i ¼ 1; . . . ;m:
aj;bj > 0:
8>>><>>>: ð32Þ
Letting v j ¼ bj � aj, the second group of equations in (32) is equivalent to:
Av ¼ b�; v ¼ ðv1; . . . ;vnÞT ;
where b� ¼ ðb�1; . . . ; b�mÞT and b�i ¼ br
i � bli.
Therefore, we need to solve the following two systems of equations,
Ax ¼ b;
Av ¼ b�:
ð33Þ
Thus, we established the following theorem.
Theorem 20. ~x ¼ ð~x1; . . . ; ~xnÞT , where ~xi ¼ ðxi;ai; biÞLR, is a solution of (2) with respect to the ranking function (30) if and only ifx ¼ ðx1; . . . ; xnÞT and v ¼ ðv1; . . . ;vnÞT are solution of (33), with v j ¼ bj � aj.
Remark 21. After solving (33), based on the definition of LR fuzzy numbers, to have ai; bi > 0 for i ¼ 1; . . . ;n, we must setai > 0 and bi ¼ ai þ v i > 0 such that bi � ai ¼ v i (or ai > e and bi ¼ ai þ v i > e; see Remark 15), for i ¼ 1; . . . ;n.Also, it is evident that if v i > 0 then by choosing ai P e or ai > 0, we have bi ¼ v i þ ai P e or bi ¼ v i þ ai > 0, respectively.
There are various methods for solving the two systems in (33), where A 2 Rm�n. In order to find the general solution of (2)with respect to the ranking function (30) we apply an ABS algorithm (see [17–20,30]) to solve the two systems in (33) simul-taneously. This way, we have an efficient solution method for solving both systems in (33) as the search vectors pi are deter-mined in the ABS algorithm. Thus, we represent Algorithm 2 below, based on ABS class of algorithms, to find the generalsolution of the two systems in (33).

3372 R. Ghanbari, N. Mahdavi-Amiri / Applied Mathematical Modelling 34 (2010) 3363–3375
Algorithm 2. Simultaneous solution of the systems in (33).
Step 1: Solve the system Ax ¼ b by an ABS algorithm (Algorithm 1). In every iteration i, 1 6 i 6 m, save the search vector pi
(see Section 2.2). If the system Ax ¼ b does not have a solution then Stop; the fuzzy linear system (1) and (2) donot have any solution.
Step 2: Select arbitrary v1 2 Rn and set i = 1.Step 3:
(3.1) If aTi pi ¼ 0 then if aT
i v i � b�i ¼ 0 then set v iþ1 ¼ v i and go to (3.3) else the system Av ¼ b� does not have a solutionand thus the fuzzy linear system (2) does not have a strong solution and go to Step 5.
(3.2) {We know aTi pi – 0} Let
a�i ¼aT
i v i � b�iaT
i pi; v iþ1 ¼ v i � a�i pi:
(3.3) Let i ¼ iþ 1. If i 6 m then go to (3.1).Step 4: Stop (the fuzzy linear system (2) has exact solutions with respect to the ranking function (30)).Step 5: Let v ¼ argminkAv � b�k2.Step 6: Stop (the fuzzy linear system (2) has approximate solutions).
Applying Algorithm 2, the general solution of (33), if any solution exists, are,
x ¼ xmþ1 þ HT q; q 2 Rn�r;
v ¼ vmþ1 þ HT t; t 2 Rn�r ;
where r ¼ rankðAÞ and HT 2 Rn�ðn�rÞ is a matrix with n� r independent columns (see Section 2.2). If the first system in (33)has a solution and the second system in (33) lacks a solution, then using v computed in Step 5 of Algorithm 2 an approximatesolution is found (for the unique solution, one can choose v� ¼ argminfkvk2 : v ¼ argminkAv � b�k2g, and the ABS approachfor solving least squares problems would compute v� using appropriate parameters of the ABS class of algorithms [18]).
In addition, we can also obtain particular solution of each system in (33) with a proper setting of the parameters of the ABSalgorithm; e.g., solutions with least Euclidean norms or even xþ ¼ Aþb and vþ ¼ Aþb�, where Aþ is a pseudoinverse of A (see Sec-tion 2.2 and [18]). It is appropriate that proposed approach for solving (2) with respect to the ranking function (30) has the flex-ibility to compute particular solutions of interest, while having the means to identify the general solution.
Algorithm 2 can be simplified when rankðAÞ ¼ m. In this case, both systems in (33) would be compatible and thefuzzy linear system (2) would have solutions. Next, we give a simplified version of Algorithm 2 for the case withrankðAÞ ¼ m.
Algorithm 3. Simultaneous solution of the systems in (33) when A has full row rank.
Step 1: Choose x1 and v1 2 Rn, arbitrary, and H1 2 Rn�n, arbitrary and nonsingular. Let i = 1.Step 2: Compute sx
i ¼ aTi xi � bi; sv
i ¼ aTi v i � b�i and si ¼ Hiai.
Step 3: Compute the search direction pi ¼ HTi zi, where zi 2 Rn is an arbitrary vector satisfying zT
i Hiai ¼ zTi si – 0. Compute
axi ¼ sx
i =aTi pi and av
i ¼ svi =aT
i pi. Let xiþ1 ¼ xi � axi pi and v iþ1 ¼ v i � av
i pi
Step 4: Update Hi to Hiþ1 by:
Hiþ1 ¼ Hi �HiaiwT
i Hi
wTi Hiai
;
where wi 2 Rn is an arbitrary vector satisfying wTi si – 0.
Step 5: If i ¼ m then Stop else let i ¼ iþ 1 and go to Step 2.
After the execution of Algorithm 3, the general solutions of (33), when rankðAÞ ¼ m , are:
x ¼ xmþ1 þ HT q; q 2 Rn�m
v ¼ vmþ1 þ HT t; t 2 Rn�m;
where HT 2 Rn�ðn�mÞ is a matrix with any n�m independent columns of HTmþ1.
Next, we discuss two examples to illustrate some possible features of the solutions obtained.
Example 22 [10]. Consider,
~x1 � ~x2 ¼ ð1;1;1ÞLL;
~x1 þ 3~x2 ¼ ð5;1;2ÞLL:
(

0 10 20 30 40 50 60 70 80 90 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Problem number
Rel
ativ
e C
PU ti
me
diffe
renc
es
Fig. 1. The values of DCPUtime.
R. Ghanbari, N. Mahdavi-Amiri / Applied Mathematical Modelling 34 (2010) 3363–3375 3373
We then need to solve,
2 To
x1 � x2 ¼ 1;x1 þ 3x2 ¼ 5;
v1 � v2 ¼ 0;v1 þ 3v2 ¼ 1:
Using Algorithm 3, we obtain bi � ai ¼ v i ¼ 0:25; bi;ai > 0; i ¼ 1;2 and x1 ¼ 2; x2 ¼ 1 as the general solution.Note that one naturally desires to obtain a solution which has the minimum distance from ~b, using a distance functionsuch as (26). Since v > 0 when a > e, then b > e; see Remark 21. Thus, we must solve the following constrained least squaresproblem (with e ¼ 10�1 as discussed in Remark 15; since the mean values of the general solution satisfies Ax ¼ b, then thedistance between two fuzzy vectors can be simplified; first and final terms in (25) is removed in this situation; see also (26)):
z ¼ min ða1 þ a2 � 0:75Þ2 þ ða1 þ 3a2 � 1Þ2h i
;
s:t: aj P e; j ¼ 1;2:
(ð34Þ
Using the LINGO 8 software package, we obtained a1 ¼ 0:625 and a2 ¼ 0:125, with the optimal value being equal to zero (thedistance is then equal to zero). Therefore, ~x ¼ ð~x1; ~x2ÞT , with ~x1 ¼ ð2;0:625;0:825ÞLL and ~x2 ¼ ð1;0:125;3:75ÞLL is the strong orexact solution as solution obtained in [10,15]. Note that in Ghanbari et al.’s method [15,16], we must solve the following twoproblems (with e ¼ 10�1 as discussed in Remark 15):
x1 � x2 ¼ 1;x1 þ 3x2 ¼ 5;
and
z ¼min ða1 þ b2 � 1Þ2 þ ðb1 þ a2 � 1Þ2h
þða1 þ 3a2 � 1Þ2 þ ðb1 þ 3b2 � 2Þ2i;
s:t: aj; bj P e; j ¼ 1;2:
8>>><>>>: ð35Þ
Therefore, using a ranking function we can reduce the complexity of the optimization problem arising from Ghanbari et al.’sapproach (compare (34) and (35)).
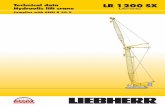
Following the above discussion, in an extensive study in showing the use of ranking functions for solving fuzzy LR linearsystems, we generated 100 test problems randomly2 (with m ¼ 10;20; . . . ;1000) having various size. In generation of the testproblems, we used 1709648 as seed of ‘‘rand” in Matlab (R2008b) software environment, working on Intel Dual Core Pentium 4processor of 2.40 MHz and 2 Gb of RAM. We used ‘‘twister” option in ‘‘rand”. We then used ‘‘rand” to generated elements of A in½�100;100� \ Z, elements of b in ½�100 m;100 m� \ Z and elements of bl and br in ½0;200 m� \ Z. For solving the correspondingleast squares problem, we used ‘‘quadprog” by using ‘‘LargeScale” option in Matlab (R2008b) software environment. We solvedthese test problems by our recently proposed approach (ABS-LS in [15]) and Algorithm 2 (when A is not full rank) or Algorithm 3(when A is full rank), and summarized the results in Figs. 1 and 2. Let CPUtimesold and CPUtimesnew be CPU times needed for ABS-LS, and Algorithm 2 or Algorithm 3. Fig. 1 shows the relative difference between CPU times of algorithms computed by
DCPU time ¼CPUtimeold � CPUtimesnew
CPUtimesold; ð36Þ
and Fig. 2 demonstrates the relative difference computed by
relative difference ¼ DnðA~xo;~bÞ � DnðA~xn;
~bÞDnðA~xo;
~bÞ; ð37Þ
get hold of the generated test problems, please contact the first author.

0 10 20 30 40 50 60 70 80 90 100−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Problem number
Rel
ativ
e er
rors
Fig. 2. Relative error computed by (37).
3374 R. Ghanbari, N. Mahdavi-Amiri / Applied Mathematical Modelling 34 (2010) 3363–3375
where xo is computed by ABS-LS, xn is computed by Algorithm 2 or Algorithm 3, depending on rank of A, and Dn is defined by(26). Fig. 1 shows that Algorithm 2 or Algorithm 3 needs less CPU time for computing a solution of a fuzzy LR linear system.Also, Fig. 2 shows that using Algorithm 2 or Algorithm 3 reduces the computing error of the solution for fuzzy LR linear sys-tem specially when the size of the system is large. From Fig. 2, it is evident that Algorithm 2 or Algorithm 3 is quite appro-priate for solving large scale systems.
Example 23. Let L ¼ R ¼ maxð0;1� xpÞ in Definition 6 and consider,
~x1 þ ~x2 � ~x3 ¼ ð1;1;1ÞLR;
2~x1 þ ~x2 þ 3~x3 ¼ ð2;10;1ÞLR:
Using Algorithm 2, setting the ABS parameters as the same as the ones for modified Huang’s algorithm and the zero vector asthe starting point for both systems, we obtain:x ¼0:61900:47620:0952
264375þ 0:3810
�0:4762�0:0952
264375 � q; v ¼
�1:2857�0:6429�1:9286
264375þ 0:3810
�0:4762�0:0952
264375 � t;
where t; q 2 R, as general solutions of the two systems in (33). Then,
~x ¼ð0:6190þ 0:3810q;a1;�1:2875þ 0:3810t þ a1ÞLR
ð0:4762� :4762q;a2;�0:6429� 0:4762t þ a2ÞLR
ð0:0952� 0:0952q;a3;�1:9286� 0:0952t þ a3ÞLR
264375;
with q 2 R, a1;a2;a3 > 0 and t > maxf1:2875�a10:3810 ; 0:6429�a2
�0:4762 ; �1:9286�a3�0:0952 g, is the general solution of (2) using the ranking function
(30).Example 23 shows that by using Algorithm 2 or Algorithm 3, we can characterize the general solution of the fuzzy linear
system. For some fuzzy optimization problems, we can change the fuzzy optimization problem to an easier one using thegeneral solution of A~x¼R
~b. Consider the following fuzzy optimization problem,
min f ð~xÞ;s:t: A~x¼R
~b;
(ð38Þ
where A is m� n crisp matrix. In (38), for ~x ¼ ðx;a; bÞLR, the unknown fuzzy LR vector, we must have a P 0 and b P 0. Notethat based on Remark 21, we have b ¼ aþ �v where �v is a solution of Av ¼ b�, one of the two systems in (33). Also, we knowthat there is a t 2 Rn�r such that �v ¼ vmþ1 þ HT t (see Example 23, the systems (33) and Remark 21). Therefore, using the gen-eral solution of A~x¼R
~b, we can change (38) to the following optimization problem:
min f ð~xÞ;s:t: aþ vmþ1 þ HT t P 0; a P 0;
ð39Þ
where vmþ1 is a solution of Av ¼ b�, one of the two systems in (33), computed by Algorithm 2 or Algorithm 3, depending onrank of A. Also, we know that x ¼ xmþ1 þ HT q, where q 2 Rn�r ; r ¼ rankðAÞ. Therefore, in (39), we have nþ 2ðn� rÞ variables,with 2ðn� rÞ variables (q and t; see Example 23) being free. In comparison with (38) with the 3n variables corresponding to~x, the optimization problem (39) has fewer variables specially when r is close to n. Thus, we see that solving the optimization

R. Ghanbari, N. Mahdavi-Amiri / Applied Mathematical Modelling 34 (2010) 3363–3375 3375
problem (39) is computationally easier than solving the optimization problem (39). In the special linear form of the objectivefunction in (38), the fuzzy linear programming problem can be simplified to a crisp linear programming problem as given by(39).
5. Conclusions
We proposed an approach for computing the general compromised solution of an LR fuzzy linear system by use of a rank-ing function when the coefficient matrix is a crisp m� n matrix. The computed solution is so that the mean values of a com-promised solution satisfies the corresponding crisp linear system. We showed that if the corresponding crisp system wereincompatible then the fuzzy linear system lacked any solution. However, if the system was compatible, then we gave a con-strained least squares problem to compute a compromised solution. If the optimal value of the constrained least squaresproblem was zero, then we obtained the LR solution, namely the exact solution, of the system with respect to a ranking func-tion. On the other hand, if the optimal value of the constrained least squares problem was nonzero, then no exact solutionexisted and thus we introduced and computed approximate solutions of the system with respect to a ranking function. Also,when a ranking function was a member of a certain class of ranking functions, we proposed an algorithm based on the ABSclass of algorithms, to compute the general compromised solution.
Acknowledgements
The authors thank the Research Council of Sharif University of Technology for its support. They are also grateful toMashallah Mashinchi for useful discussions and his provision of some references, and to the anonymous referees for theirhelpful comments and suggestions.
References
[1] R.E. Moore, Methods and Applications of Interval Analysis, SIAM, Philadelphia, 1979.[2] J.J. Buckley, E. Eslami, T. Feuring, Fuzzy Mathematics in Economics and Engineering, Studies in Fuzziness and Soft Computing, Physica-Verlag, 2002.[3] J.J. Buckley, Y. Qu, Solving systems of linear fuzzy equations, Fuzzy Sets Syst. 43 (1991) 33–43.[4] A. Vroman, G. Deschrijver, E. Kerre, Solving systems of linear fuzzy equations by parametric functions-an improved algorithm, Fuzzy Sets Syst. 158
(2007) 1515–1534.[5] S. Muzzioli, H. Reynaerts, Fuzzy linear systems of form A1xþ b1 ¼ A2xþ b2, Fuzzy Sets Syst. 157 (2006) 939–951.[6] S. Muzzioli, H. Reynaerts, The solution of fuzzy linear systems by nonlinear programming: a financial application, Eur. J. Oper. Res. 177 (2007) 1218–
1231.[7] F. Abramovich, M. Wagenknecht, Y.I. Khurgin, Solution of LR-type fuzzy systems of linear algebraic equations, Busefal 35 (1988) 86–99.[8] H. Mishmast-Nehi, H.R. Maleki, M. Mashinchi, A canonical representation for the solution of fuzzy linear system and fuzzy linear programming
problem, J. Appl. Math. Comput. 20 (2006) 345–354.[9] M. Friedman, M. Ma, A. Kandel, Fuzzy linear systems, Proc. IEEE Int. Conf. Syst., Man, Cybernet. 1 (1996) 14–17. October 336–338.
[10] M. Friedman, M. Ma, A. Kandel, Fuzzy linear systems, Fuzzy Sets Syst. 96 (1998) 201–209.[11] M. Ma, M. Friedman, A. Kandel, Duality in fuzzy linear systems, Fuzzy Sets Syst. 109 (2000) 55–58.[12] T. Allahviranloo, Numerical methods for fuzzy system of linear equations, Appl. Math. Comput. 155 (2004) 493–502.[13] T. Allahviranloo, The Adomian decomposition method for fuzzy system of linear equations, Appl. Math. Comput. 163 (2005) 553–563.[14] T. Allahviranloo, Successive over relaxation iterative method for fuzzy system of linear equations, Appl. Math. Comput. 162 (2005) 189–196.[15] R. Ghanbari, N. Mahdavi-Amiri, R. Yousefpour, Fuzzy LR linear systems: LR solutions and new algorithms using ABS approach, Iranian Journal of Fuzzy
Systems, in press.[16] R. Ghanbari, N. Mahdavi-Amiri, R. Yousefpour, 2008. New algorithm using ABS approach for solving fuzzy LR linear systems, (Extended Abstract), in
Proceedings of International Conference on Approximation in Scientific Computing, Beijing, China, Oct. 26–30, pp. 38–39.[17] J. Abaffy, C. Broyden, E. Spedicato, A class of direct methods for linear systems, Numer. Math. 45 (1984) 361–376.[18] J. Abaffy, E. Spedicato, ABS Projection Algorithms: Mathematical Techniques for Linear and Nonlinear Equations, Ellis Horwood, Chichester, 1989.[19] S. Nicolai, E. Spedicato, A bibliography of the ABS methods, Optim. Methods Softw. 8 (1997) 171–183.[20] E. Spedicato, E. Bodon, A. Del Popolo, N. Mahdavi-Amiri, ABS methods and ABSPACK for linear systems and optimization: a review, 4OR 1 (2003) 51–66.[21] C. Cheng, A new approach for ranking fuzzy numbers by distance method, Fuzzy Sets Syst. 95 (1998) 307–317.[22] N. Mahdavi-Amiri, S.H. Nasseri, Duality in fuzzy number linear programming by use of a certain linear ranking function, Appl. Math. Comput. 180
(2006) 206–216.[23] N. Mahdavi-Amiri, S.H. Nasseri, Duality results and a dual simplex method for linear programming problems with trapezoidal fuzzy variables, Fuzzy
Sets Syst. 158 (2007) 1961–1978.[24] R.R. Yager, On a general class of fuzzy connectives, Fuzzy Sets Syst. 4 (1980) 235–242.[25] H.R. Maleki, M. Tata, M. Mashinchi, Linear programming with fuzzy variables, Fuzzy Sets Syst. 109 (2000) 21–33.[26] H.T. Nguyen, E.A. Walker, A First Course in Fuzzy Logic, Chapman & Hall, 2000.[27] H.J. Zimmermann, Fuzzy Set Theory and its Applications, third ed., Kluwer Academic, Norwell, 1996.[28] D. Dubois, H. Prade, Fuzzy Sets and Systems, Theory and Applications, Academic Press, New York, 1980.[29] H. Esmaeili, N. Mahdavi-Amiri, E. Spedicato, A class of ABS algorithms for Diophantine linear systems, Numer. Math. 91 (2001) 101–115.[30] E. Spedicato, Z. Xia, L. Zhang, ABS algorithms for linear equations and optimization, J. Comput. Appl. Math. 124 (2000) 155–170.[31] G.H. Golub, C.F. Van Loan, Matrix Computations, thirdrd ed., Johns Hopkins University Press, Baltimore, MD, 1996.[32] S. Murakami, S. Maeda and S. Imamura, 1983. Fuzzy decision analysis on the development of centralized regional energy control; system, Proceedings
of the IFAC Symposium on Fuzzy Inform. Knowledge Representation and Decision Analysis, pp. 363–368.[33] M. Ming, M. Friedman, A. Kandel, General fuzzy least squares, Fuzzy Sets Syst. 88 (1997) 107–118.[34] M. Roubens, Inequality constraints between fuzzy numbers and their use in mathematical programming, in: R. Slowinski, J. Teghem (Eds.), Stochastic
Versus Fuzzy Approachs to Multiobjective Mathematical Programming Under Uncertainty, Kluwer Academic Publishers., Dordrecht, 1991, pp. 321–330.