
Multidimensional interval routing schemes
18
-
Upload
independent -
Category
Documents
-
view
2 -
download
0
Transcript of Multidimensional interval routing schemes

Multi-Dimensional Interval Routing Schemes?Michele Flammini1, Giorgio Gambosi2, Umberto Nanni3 and Richard B. Tan4;51 Dipartimento di Matematica Pura ed Applicata,University of L'Aquila,via Vetoio loc. Coppito, I-67010 L'Aquila, [email protected] Dipartimento di Matematica,University of Rome \Tor Vergata",via della Ricerca Scienti�ca, I-00133 Rome, [email protected],3 Dipartimento di Informatica e Sistemistica,University of Rome \La Sapienza",via Salaria 113, I-00198 Rome, [email protected] Department of Computer Science,Utrecht UniversityPadualaan 14, 3584 CH Utrecht, the [email protected] Department of Computer ScienceUniversity of Sciences & Arts of OklahomaChickasha, OK 73018, U.S.A.Abstract. Interval Routing Scheme (k-IRS) is a compact routing schemeon general networks. It has been studied extensively and recently been im-plemented on the latest generation INMOS Transputer Router chip. In thispaper we introduce an extension of the Interval Routing Scheme k-IRS to themulti-dimensional case hk; di-MIRS, where k is the number of intervals and dis the number of dimensions. Whereas k-IRS only represents compactly a sin-gle shortest path between any two nodes, with this new extension we are ableto represent all shortest paths compactly. This is useful for fault-toleranceand tra�c distribution in a network. We study e�cient representations ofall shortest paths between any pair of nodes for general network topologies,for product graphs and for speci�c interconnection networks such as rings,grids, tori, hypercubes and chordal rings. For these interconnection networkswe show that for about the same space complexity as k-IRS we can repre-sent all shortest paths in hk; di-MIRS (as compared to only a single shortestpath in k-IRS). Moreover, trade-o�s are derived between the dimension dand the number of intervals k in multi-dimensional interval routing schemeson hypercubes, grids and tori.Keywords : Compact Routing Methods, Interval Routing Schemes, Intercon-nection Networks, Product Graphs, Dimensions.? Work supported by the EU ESPRIT Long Term Research Project ALCOM-IT undercontract N. 20244 and by the Italian MURST 40% project \Algoritmi, Modelli di Calcoloe Strutture Informative".
1 IntroductionRouting messages between pairs of processors is a fundamental task in a distributedcomputing system. In order to exchange messages between pairs of processors insuch a way as to maintain a high throughput, it is important to route messagesalong paths of minimum cost (shortest paths). Moreover, the distributed nature ofthe system requires that path information be stored somehow at each intermediatenode.As more processors are added to the system in order to increase the computingpower, the underlying communication network needs to scale favorably along withthe expansion. Moreover, as the amount of storage space at each processor is limited,the expansion of the network should not put undue burden locally by requiringexcessive space for communication purposes. The routing methods used should alsobe simple and dynamically adjustable with the expansion. The underlying networkstructure can be quite arbitrary, so the routing methods should not rely on any�xed topology. More and more emphasis is given to this type of universal routing onarbitrary networks (see, for example, [MT90], [I91], [HKR91]).The trivial solution is the one of storing, at each node v, a complete routing tablewhich speci�es, for each destination u, one incident link belonging to a shortest pathbetween u and v. Such a table has size �(n � log �), where � is the node degreeand n the size of the network. Since in the general case such tables are too space-consuming for large networks, it is necessary to devise routing schemes with smallertables. This gives rise to a need of simple scalable and topology independent compactrouting methods.Research activities have focused on identifying classes of network topologieswhere the shortest path information at each node can be succinctly stored, assum-ing that suitably \short" labels can be assigned to nodes and links at preprocessingtime. Such labels are used to encode useful information about the network structure,with special regard to shortest paths.In the ILS (Interval Labeling Scheme) ([SK82], [LT83], [LT85]), node-labels be-long to the set f1; : : : ; ng, while link-labels are pairs of node-labels representingdisjoint intervals of [1::n]. To send a message m from a source vi to a destinationvj , m is transmitted by vi on the (unique) link e = (vi; vk) such that the label of vjbelongs to the interval associated to e. With this approach, one always obtains ane�cient memory occupation, while the problem is to choose node and link-labels insuch a way that messages are routed along shortest paths.In [SK82], [LT83], [LT85] it is shown how the ILS approach can be applied to opti-mally route messages on particular network topologies, such as trees, rings, etc. TheILS approach has also been used in other papers as a basic building block for rout-ing schemes based on network decomposition and clustering ([ABLP89], [ABLP90],[FJ86], [FJ89], [FJ90], [PU89]).In [LT85], the model has been extended to allow more than 1 interval to beassociated to each link; in particular, a 2-ILS, i.e. a scheme associating at most 2intervals for each edge, is proposed for 2-dimensional doubly wrapped grids. Multi-label k-ILS has been implemented on the latest generation of INMOS TransputerC104 Router Chips [I91] (for a survey of results on compact routing methods see[LT94]). 2

All results on ILS only handle the case where just one shortest path betweeneach pair of nodes is represented. On the other hand, representing all shortest pathsbetween each pair of nodes turns out to be convenient when problems related to ow control aspects such as fault tolerance and tra�c load balancing are considered.The Boolean Routing approach introduced in [FGS93] explicitly aims at the e�-cient representation of all shortest paths. However, in this scheme di�erent booleanpredicates need to be used for each network.In order to derive e�cient ILS routing schemes for the representation of allshortest paths, we introduce multi-dimensional extensions of ILS, hk; di-MILS. Inthis extension, an ILS with associated dimension d has as node-labels d-tuples ofintegers, while each link is labeled with up to k d-tuples of intervals. The usual ILScorresponds to the case d = 1.We show in this paper that with this new extension of ILS to multi-dimensionalILS it is possible to represent all shortest paths compactly in a routing table forcommon interconnection networks such as trees, rings, grids, tori, hypercubes andchordal rings, with about the same space complexity as the regular k-ILS. We alsoconsider problems on the e�ciency of the new extensions for general graphs. Theproblem of deriving trade-o�s between dimension d and the number of intervals k isalso studied. In particular, some trade-o�s between these parameters are given forrelevant interconnection networks such as grids, tori, and hypercubes. For example,for about the same space complexity as the normal 1-ILS, it is easy to representa d-dimension hypercube with a h1; di-MILS representing all shortest paths, (i.e.with only 1 interval per link using d dimensions), whereas we show that it requiresd 2d�1d e-ILS (a much higher number of intervals and space complexity) to achieve thesame task.The paper is organized as follows. The next section contains a description of thecommunication model used and some de�nitions. In section 3 we state some resultsfor general networks. We show that the product of graphs with optimum multi-dimensional ILS is also an optimal multi-dimensional ILS. Also a complexity resulton NP-hardness of multi-dimensional ILS is stated. Section 4 contains speci�c resultson interconnection networks trees, rings, grids, tori, hypercubes and chordal rings.In section 5 we study the relationship between the dimension d and the number ofintervals k: how it is possible to trade-o� one parameter for the other in networkssuch as hypercubes, grids and tori. We also give tight bounds on the number ofintervals and dimensions needed for hypercubes. Section 6 contains results on othervariations of the MILS model. Finally we list some open problems in the last section.2 The ModelThe model we shall use is the point to point communication model, where eachprocess in the network has access only to its own local memory and communicate bysending messages via one of its neighbors. Let G =< V;E > be a graph (network)with vertex set V of size n and edge set E. An Interval Labeling Scheme(ILS) isa scheme of labeling each node in the graph with some unique integer in the setf1; :::; ng and each link (outgoing edge) with a unique interval [a; b], with a; b 2f1; :::; ng. Wrap-around of intervals is allowed, so if a > b then [a; b] = fa; a +3

1; :::; n; 1; :::; bg. The set of all intervals associated with the links of a node forms apartition of the interval [1::n] (thus in reality each link needs to be labeled with onlythe left end-point of the interval). Messages to a destination node j are routed viathe link that is labeled with the interval [a; b] such that j 2 [a; b]. An ILS is valid if,for all the nodes i and j of G, messages sent from i to j eventually reach j correctly.A valid ILS is sometimes called an Interval Routing Scheme (IRS for short).We now extend the above concept to multi-dimension. For simplicity, we �rstde�ne a d�dimensional ILS. A h1; di-MILS (multi-dimensional ILS) (d > 0) is alabeling scheme where each node of G is labeled with an element from Nd (where Nis the set of non-negative integers, and d is the dimension) and each link is labeledwith a d�tuple ([a1; b1]; :::; [ad; bd]) of intervals, ai; bi 2 N for each i. In general, let Ibe the set of all closed intervals on N, (so we can consider I = N�N); each link in ah1; di-MILS is then labeled with a value from Id. To route a message to a destinationnode j = (j1; :::; jd) a node checks its link-labels and �nds one d-tuple of intervals([a1; b1]; :::; [ad; bd]) that satis�es ji 2 [ai; bi] for each i; 1 � i � d.In a hk; di-MILS each link is labeled with up to k values from Id, i.e. with at mostk d-tuples of intervals. A message with destination j = (j1; :::; jd) is then routed onany link with label fI1; :::; Ilg (l � k and Ih 2 Id; 1 � h � l) if there exists somed-tuple of intervals Ih such that ji 2 [aih ; bih ] for each i, 1 � i � d. A valid MILSis also called a multi-dimensional Interval Routing Scheme (MIRS). Thus a regularIRS is just a h1; 1i-MIRS.A hk; di-MIRS is optimum if the route traversed by each message is via a shortestpath and overall optimum if, for any two nodes u; v 2 V , all the shortest paths from uto v are represented in the scheme. In the case where multiple paths are represented(as for an overall optimum MIRS), the labels on the edges of a given node mayoverlap, i.e., they do not form a partition of the vertices in V .The k-IRS model de�ned in Section 2 was the original one introduced in [LT85].In [FJ86] a restricted version was introduced, which is usually called a Strict k-IRS(k-SIRS). In this model, a link-label must not contain the node-label of the node it isincident on. Thus for example, a node labeled 5 must not have an incident link withan interval containing 5, like for instance [3; 6]. The class of graphs that allows ak-SIRS is strictly smaller than the regular k-IRS, even though the space complexityis completely identical. We can similarly de�ne a hk; di-MSIRS model.In the 1-dimensional case, the deletion of the label of one node from the intervalsassociated to its outgoing edges creates at most one new interval per link. Therefore,the following lemma can be easily proved.Lemma1. Given any graph G, if there is a hk; 1i-MIRS for G then there exists alsoa hk + 1; 1i-MSIRS.A weaker results can be proved for higher dimensions.Lemma2. Given any graph G, if there is a hk; di-MIRS for G then there exists alsoa hk � 2d; di-MSIRS.Proof. Given a node v having label (i1; : : : ; id), consider a multi-dimensional inter-val Id = ([a1; b1]; : : : ; [ad; bd]) associated to one of its incident links which satis�es(i1; : : : ; id), i.e., such that for each j, 1 � j � d, aj � ij � bj .4

Let SId be the set of node labels satis�ed by Id. Then, the set SId�f(i1; : : : ; id)gcan be exactly satis�ed by the disjunction of the 2 � d multi-dimensional intervals([a1; i1 � 1]; : : : ; [ad; bd]); ([i1 + 1; b1]; : : : ; [ad; bd]),([i1; i1]; [a2; i2 � 1]; : : : ; [ad; bd]); ([i1; i1]; [i2 + 1; b2]; : : : ; [ad; bd]),...([i1; i1]; [i2; i2]; : : : ; [ad; id � 1]); ([i1; i1]; [i2; i2]; : : : ; [id + 1; bd])where the operations for each dimension j are the appropriate modulo operations toallow for cyclic intervals.The lemma follows by observing that the above argument is true for any multi-dimensional interval associated to an outgoing link of v. ut3 Multi-Dimensional Interval Routing On General NetworksLet G =< V;E > be a graph with jV j = n. Let the nodes of G be v1; :::; vn. We cansimply label node v1 with the n-tuple (1; 0; :::; 0), node v2 with (0; 1; 0; :::; 0) and soon. Now label each link with the n-tuple of intervals ([0; b1]; :::; [0; bn]), where bi = 1if node vi can be reached by a shortest path via this link and bi = 0 otherwise. Itis easily seen that this is a valid and overall optimum h1; ni-MSIRS. But we can doslightly better.Theorem3. For any graph G, there is an overall optimum h1; dn2 ei-MSIRS.Proof. Let the nodes of G be v1; :::; vn. Label node v1 with the dn2 e-tuple (1; 0; :::; 0),node v2 with (2; 0; :::; 0), node v3 with (0; 1; 0; :::; 0), node v4 with (0; 2; 0; :::; 0) andin general node vi with the dn2 e-tuple (d1; : : : ; ddn2 e) such that dj = 0 for j 6= d i2e,dd i2 e = 1 if i is odd and dd i2 e = 2 if i is even.Now at each node vi label each incident link e with the dn2 e-tuple of intervals([a1; b1]; :::; [adn2 e; bdn2 e]), where:{ aj = 0; bj = 0 if e is neither on a shortest path between vi and v2j�1 nor on ashortest path between vi and v2j ;{ aj = 0; bj = 1 if e is on a shortest path between vi and v2j�1 and e is not on ashortest path between vi and v2j ;{ aj = 2; bj = 0 if e is not on a shortest path between vi and v2j�1 and e is on ashortest path between vi and v2j ;{ aj = 0; bj = 2 if e is on a shortest path between vi and v2j�1 and also on ashortest path between vi and v2j .It is easily seen that this scheme is overall optimum. utThe space complexity of the scheme as described above requires n bits for eachnode-label and 2n bits for each link-label.On the other hand, we can simply label each node with a value in f1; :::; ng and,for any link, list all the nodes (at most n) optimally reachable through that linkby specifying, for each such node i, the corresponding interval [i; i]. This gives usan overall optimum hn; 1i-MSIRS, which can be further improved by the followingtheorem. 5

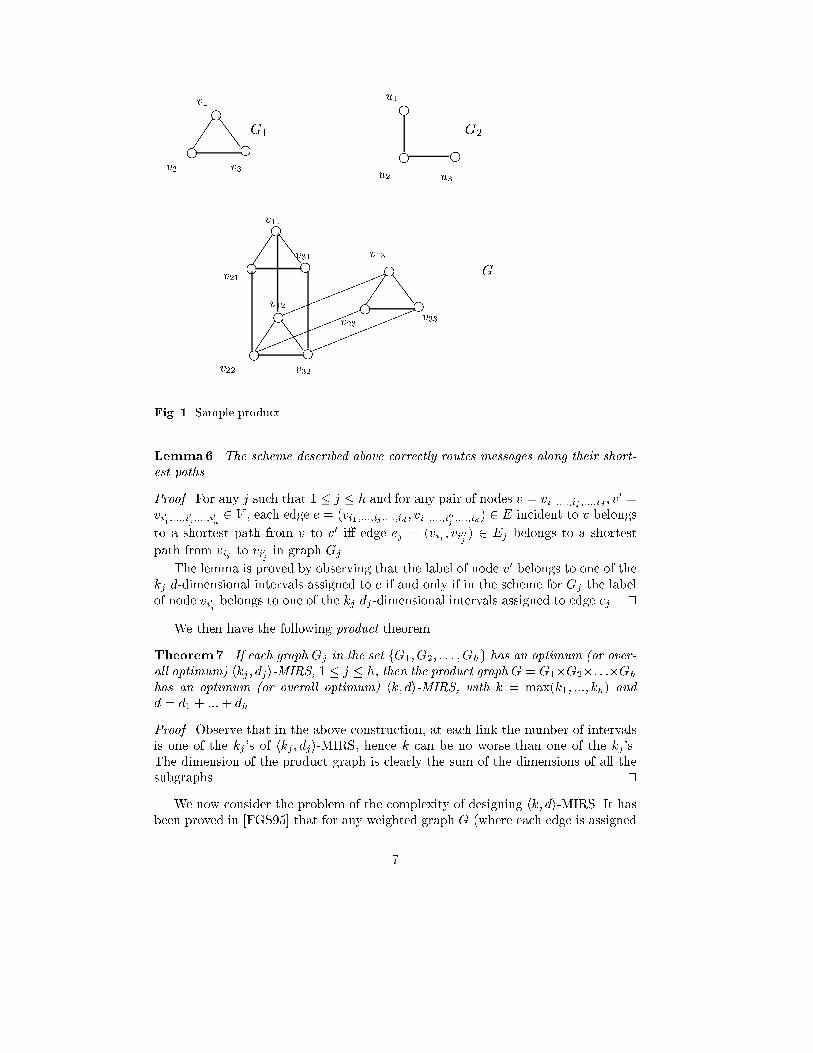
Theorem4. For any graph G, there exists an overall optimum hbn2 c; 1i-MSIRS.Proof. We use the above hn; 1i-MSIRS scheme and note that we can collapse anytwo adjacent intervals [i; i], [i+ 1; i+ 1] to a single interval [i; i+ 1]. Thus we haveat most bn2 c intervals left. utThe space complexity of the node-label for this scheme is logn but the link-labelcan be quite bad, about n logn. In general, for a hk; di-MIRS, let the node-label be(i1; :::; id) with i1 2 f0; :::; n1g; :::; id 2 f0; :::; ndg. Then the size of each node-label isabout logn1+ :::+lognd = log(n1 �n2 � � �nd) and the size of each link-label is about2k log(n1 � n2 � � �nd). We shall see in the next two sections that for speci�c graphswe can actually do much better.We now consider the Cartesian Product of graphs. This class of graphs includesthe topologies of some interconnection networks commonly used in parallel architec-tures, such as hypercubes, d-dimensional grids and tori.De�nition 5. Given h graphs G1 = (V1; E1); : : : ; Gh = (Vh; Eh), h > 0, de�ne theproduct graph G1 � : : :�Gh, as the graph G = (V;E), where:1. V = V1 � : : :� Vh,2. E = Shj=1f(vi1;:::;ij ;:::;ih ; vi1;:::;i0j ;:::;ih) j vi1 2 V1; : : : ; vij�1 2 Vj�1; vij 2 Vj ;vij0 2 Vj ; vij+1 2 Vj+1; : : : ; vih 2 Vh; (vij ; vi0j ) 2 Ejg, where for the sake ofsimplicity we denote any node (vi1 ; : : : ; vih) 2 V by vi1;:::;ih .The de�nition states that each node vi1;:::;ih of the resulting graph G belongs tothe d dimensional space V = V1 � : : : � Vh and that for any j, with 1 � j � h,the subgraph induced by all nodes with the same i1; : : : ; ij�1; ij+1; : : : ih values isisomorphic to Gj . In Fig. 1 an example of product graph for h = 2 is provided.We note here that the product of graphs with k-IRS schemes is not necessarily ak-IRS ([LT85, R88]), but this is true for Linear Interval Routing schemes ([KKR93])and Boolean Routing schemes ([FGS94]). Happily this is also true for hk; di-MIRS.Suppose each subgraph Gj has a hkj ; dji-MIRS, 1 � j � h, withjVj j = nj . Let G = (V;E) be the product graph de�ned as above andlet d = Phj=1 dj . We label each node vi1;:::;ij ;:::;ih 2 V with the d-tuple(a1;1; : : : ; a1;d1 ; a2;1; : : : ; a2;d2 ; : : : ; ah;1; : : : ; ah;dh), where for each j, (aj;1; : : : ; aj;dj )is the label of node vij 2 Vj in the hkj ; dji-MIRS for Gj .For each link e = (vi1;:::;ij ;:::;ih ; vi1;:::;i0j ;:::;ih) 2 E in the product graph G, welabel it with kj d-tuples of intervals(I1;1; : : : ; I1;sj ; I1;sj+1; : : : ; I1;sj+dj ; I1;sj+1+1; : : : ; I1;d);...(Ikj ;1; : : : ; Ikj ;sj ; Ikj ;sj+1; : : : ; Ikj ;sj+dj ; Ikj ;sj+1+1; : : : ; Ikj ;d);where sj = Pj�1i=1 di, and for each i such that either i < sj or i > sj+1 + 1,I1;i = I2;i = : : : = Ikj ;i is the interval containing the i-th dimensional componentsof all node-labels, and (I1;sj+1; : : : ; I1;sj+dj ), ... , (Ikj ;sj+1; : : : ; Ikj ;sj+dj ) are the kjdj-tuples associated at node vij to edge ej = (vij ; vi0j ) 2 Ej in the hkj ; dji-MIRS forGj .It is now possible to prove the following lemma:6
v21 v11!!!!!!!!!!!!!!!!
ff f SSSSSS ff SSS fff f!!!!!!!!ff ff ff SSS G1 G2v1v2 v3 u1u2 u3
Gv12v22 v32v31 v13v23 v33
Fig. 1. Sample productLemma6. The scheme described above correctly routes messages along their short-est paths.Proof. For any j such that 1 � j � h and for any pair of nodes v = vi1;:::;ij ;:::;id ; v0 =vi01;:::;i0j ;:::;i0d 2 V , each edge e = (vi1;:::;ij ;:::;id ; vi1;:::;i00j ;:::;id) 2 E incident to v belongsto a shortest path from v to v0 i� edge ej = (vij ; vi00j ) 2 Ej belongs to a shortestpath from vij to vi0j in graph Gj .The lemma is proved by observing that the label of node v0 belongs to one of thekj d-dimensional intervals assigned to e if and only if in the scheme for Gj the labelof node vi0j belongs to one of the kj dj -dimensional intervals assigned to edge ej . utWe then have the following product theorem.Theorem7. If each graph Gj in the set fG1; G2; : : : ; Ghg has an optimum (or over-all optimum) hkj ; dji-MIRS, 1 � j � h, then the product graph G = G1�G2�: : :�Ghhas an optimum (or overall optimum) hk; di-MIRS, with k = max(k1; :::; kh) andd = d1 + :::+ dh.Proof. Observe that in the above construction, at each link the number of intervalsis one of the kj 's of hkj ; dji-MIRS, hence k can be no worse than one of the kj 's.The dimension of the product graph is clearly the sum of the dimensions of all thesubgraphs. utWe now consider the problem of the complexity of designing hk; di-MIRS. It hasbeen proved in [FGS95] that for any weighted graph G (where each edge is assigned7
a non-negative weight) and any integer k > 0, deciding whether there exists anoptimum k-IRS for G is NP-Complete, both in the case that only one shortest pathand when all shortest paths must be represented. As a direct consequence of thisresult we obtain the following theorem.Theorem8. Given a weighted graph G and two integers k; d � 1, the problem ofdeciding whether an optimum or overall optimum hk; di-MIRS exists for G is NP-Complete.Proof. The problem is in NP since given an hk; di-MIRS for G it is possible to verifyin polynomial time whether or not it is overall optimum. The completeness can bederived directly by restriction to the case d = 1. ut4 Interconnection NetworksWe now show that there exists an overall optimum MIRS for some standard inter-connection networks.Theorem9. Trees, Rings and Complete Graphs have overall optimumh1; 1i-MSIRS.Proof. For trees and complete graphs, the overall optimum MIRS is just the normal1-IRS (see [SK82] and [LT85]), as there is only a single shortest path between eachpair of nodes. We can also extend the standard optimal 1-IRS for rings to includeall shortest paths by specifying the correct end-point of each interval to include theappropriate node on rings of even size. utThe space complexity for each node-label is just logn and for each link-label itis 2 logn.Theorem10. Complete Bipartite Graphs have overall optimum h2; 1i-MSIRS.Proof. Let G = (NA [ NB ; E) be a complete bipartite graph, with E = f(x; y) jx 2 NA and y 2 NBg, jNAj = nA, and jNB j = nB . Nodes in NA are labeledwith labels 1; :::; nA and nodes in NB with labels nA + 1; :::; nA + nB . For eachnode a in NA with label la 2 f1; :::; nAg, and for each node b in NB with labellb 2 fnA + 1; :::; nA + nBg, the link connecting a to b is labeled with the 2-intervals1-dimensional label f[1; nA]; [lb; lb]g. Similarly, for each node b in NB , label each link(b; a) connecting b to a node a in NA with f[nA +1; nA + nB ]; [la; la]g. It is easy toverify that such labeling covers all the shortest paths in the graph G. utThe overall optimum MIRS described above has a space complexity logn foreach node-label and 4 logn for each link-label.Theorem11. d-grids, d-tori and d-hypercubes have overall optimum h1; di-MSIRS.8

Proof. This follows immediately from the product of lines (trees of degree 2) andrings, and applying the product Theorem 7. utFinally we consider the class of chordal ring networks, in which processors areconnected as in a ring, but there are chords connecting pair of nodes at distancegreater than one.De�nition 12. A chordal ring is a graph Rn(C) = (V;E), where C � f2; :::; n� 2g,V = fv0; : : : ; vn�1g, E = E1SE2 with E1 = f(vi; v(i+1)modn) j i = 0; : : : ; n � 1gand E2 = f(vi; v(i+j)modn) j i = 0; :::; n� 1; j 2 Cg. Edges in E2 are called chords.By adding chords it is possible to obtain classes of denser graphs, from rings upto complete graphs.In the following two theorems we will drop the mod notation implicitly assumingthat all operations are modn and denote as rem(a; b) the remainder of ab .Theorem13. There exists a h2; 2i-MSIRS for Rn(fkg), where nmod k = 0.Proof. The h2; 2i-MSIRS for Rn(fkg) can be constructed as follows: label each nodevi as (i; rem(i; k)�nk+b ik c). Notice that, starting from any node vi, the subset of nodesreachable via the chords of length k induces a ring Ri of dimension nk ; moreover thesecond component of the labels of nodes in Ri form the interval [rem(i; k)� nk ; rem(i+1; k) � nk � 1].It is not di�cult to verify that vi reaches, via the link, (vi; vi+1) nodes vj belong-ing to rings Ri+1; : : : ; Ri+d k2 e such that i+1 � j � i+ bn2 c, plus nodes vj belongingto rings Ri+1; : : : ; Ri+d k2 e�1 such that i+ bn2 c+ 1 � j � i� 1. By construction, thesecond component of the labels of nodes in rings Ri+1; : : : ; Ri+d k2 e form the interval[rem(i+1; k)�nk ; rem(i+dk2 e+1; k)�nk�1], while the second component of the labels ofnodes in Ri+1; : : : ; Ri+d k2 e�1 form the interval [rem(i+1; k)� nk ; rem(i+dk2e; k)� nk�1].Hence, the two 2-dimensional intervals ([i+1; i+bn2 c]; [rem(i+1; k)� nk ; rem(i+dk2 e+1; k) � nk � 1]) and ([i+ bn2 c+1; i� 1]; [rem(i+1; k) � nk ; rem(i+ dk2 e; k) � nk � 1]) coverall subset of nodes optimally reachable at node vi via the incident link (vi; vi+1).Furthermore, vi can reach, via (vi; vi+k), nodes vi+b k2 c+1; : : : ; vi+bn2 c, which arecovered by the 2-dimensional interval ([i+ bk2 c+ 1; i+ bn2 c]; [0; n� 1]).Similarly, by a completely symmetric argument it is possible to show that links(vi; vi�1) and (vi; vi�k) can be labeled with at most two 2-dimensional intervals, andthe theorem holds. utTheorem14. There exists a h2; 3i-MSIRS for Rn(fk1; k2g), where nmod k2 = 0and k2mod k1 = 0.Proof. The h2; 3i-MSIRS for Rn(fk1; k2g) can be constructed as follows: label eachnode vi as (i; rem(i; k1) � nk1 + b ik1 c; rem(i; k2) � nk2 + b ik2 c).Notice that, starting from any node vi, the subset of nodes reachable via thechords of length k1 induces a ring R1;i of dimension nk1 and the subset of nodesreachable via the chords of length k2 induces a ring R2;i of dimension nk2 . Moreover,by construction the second component of the labels of nodes in R1;i form the interval9

[rem(i; k1) � nk1 ; rem(i + 1; k1) � nk1 � 1], while the third component of the labels ofnodes in R2;i form the interval [rem(i; k2) � nk2 ; rem(i+ 1; k2) � nk2 � 1].It is not di�cult to verify that vi reaches, via the edge (vi; vi+1), nodes vj be-longing to rings R1;i+1; : : : ; R1;i+d k12 e such that i + 1 � j � i + bn2 c, plus nodes vjbelonging to rings R1;i+1; : : : ; R1;i+d k12 e�1 such that i+ bn2 c+1 � j � i�1. By con-struction, the second component of the labels of nodes in rings R1;i+1; : : : ; R1;i+d k12 eform the interval [rem(i+1; k1) � nk1 ; rem(i+ dk12 e+ 1; k) � nk1 � 1], while the secondcomponent of the labels of nodes in rings R1;i+1; : : : ; R1;i+d k12 e�1 form the interval[rem(i+1; k1) � nk1 ; rem(i+ dk12 e; k) � nk1 � 1]. Hence the two 3-dimensional intervals([i + 1; i + bn2 c]; [rem(i + 1; k1) � nk1 ; rem(i + dk12 e + 1; k) � nk1 � 1]; [0; n � 1]) and([i+ bn2 c+ 1; i� 1]; [rem(i+ 1; k1) � nk1 ; rem(i+ dk12 e; k) � nk1 � 1]; [0; n� 1])Furthermore, vi reaches, via the edge (vi; vi+k1), nodes vj belonging to ringsR2;i+b k12 c+1; : : : ; R2;i+k1�d k22k1 e+b k1��2 c such that i + 1 � j � i + bn2 c and nodes vjbelonging to rings R2;i+b k12 c+1; : : : ; R2;i+k1�(d k22k1 e�1)+b k1��2 c such that i+ bn2 c+1 �j � i�1, where � = 1 if k2k1 is odd, else � = 0. Such nodes can be covered by the two3-dimensional intervals ([i+1; i+ bn2 c]; [0; n� 1]; [rem(i+ bk12 c+1; k2) � nk2 ; rem(i+k1 � d k22k1 e+bk1��2 c+1; k2) � nk2 �1]) and ([i+bn2 c+1; i�1]; [0; n�1]; [rem(i+bk12 c+1; k2) � nk2 ; rem(i+ k1 � (d k22k1 e � 1) + bk1��2 c+ 1; k2) � nk2 � 1]).Finally, vi reaches, via the edge (vi; vi+k2 ), nodes vi+b k22 c+1; : : : ; vi+bn2 c, whichare covered by the 3-dimensional interval ([i+ bk2c+1; i+ bn2 c]; [0; n� 1]; [0; n� 1]).Similarly, by a completely symmetric argument it is possible to show that links(vi; vi�1); (vi; vi�k1) and (vi; vi�k2 ) can be labeled with at most two 3-dimensionalintervals, and the theorem holds. utWe note that, for the classes of chordal rings considered in the above two the-orems, no upper bound on the number of intervals k with an overall optimumhk; 1i-MIRS is known.For the hypercubes, the space complexity of each node-label and each link-label isrespectively log 2d = d and 2 log 2d = 2d. Also the ones for grids and tori are logn and2 logn, while the ones for chordal rings Rn(fkg) are 2 logn�log k and 4 logn�2 log k.Finally, the space complexity of each node-label and link-label for chordal ringsRn(fk1; k2g) is respectively 3 logn� log k1 � log k2 and 12 logn� 4 log k1 � 4 log k2.Notice that, in the case of hypercubes, since d = logn, this shows that it ispossible to represent all shortest paths in the network with no additional cost (interms of space) with respect to the usual representation of one shortest path forany pair of nodes in 1-IRS. Thus we gain in exibility of routing with the multi-dimensional h1; di-MIRS. In the next section we shall see that we can obtain an evenbetter bound with an overall optimum h1; d2 i-MIRS.5 Trade-o�s between k and d in hk; di-MIRSIn this section we investigate the relationship between the number of intervals k andthe number of dimensions d in hk; di-MIRS. We show that for some interconnection10

networks there are trade-o�s between these two parameters in MIRS. In particularwe show how the increase of the number of dimensions d yields a correspondingdecrease of the number of intervals k needed and vice versa.5.1 Technical PreliminariesWe now introduce the matrix representations of shortest paths [F95, FLM95] andstate some of their properties that will be exploited for determining lower and upperbounds on the number of intervals needed by the MIRS.For a graph G = (V;E), and a node v 2 V , we will denote by I(v) � E the setof links incident to v and by I(V ) = f(v; e) j v 2 V; e 2 I(v)g the set of all possiblepairs of node and incident-link. Moreover, for each node u and each link e 2 I(u),denote by s(u; e) the set of nodes v optimally reachable from u through that link(i.e. such that e belongs to some shortest path from u to v).De�nition 15. Given a graph G = (V;E) and a set of pairs P =f(v1; e1); : : : ; (vl; el)g � I(V ), the matrix representation of G w.r.t. P is an n � lmatrix M(P ) such that M(P )[j; i] = 1 if vj 2 s(vi; ei), otherwise M(P )[j; i] = 0.Clearly, in the one-dimensional case there is a one-to-one correspondence betweeneach permutation of the rows of M(P ) and each labeling of the nodes in G and, asfar as only strict schemes are concerned, inM(P ) each maximal block of consecutiveentries equal to 1 in column i corresponds to a maximal interval of integers associatedat node vi to its incident link ei. Thus the following lemma can be easily proved.Lemma16. Given G = (V;E), let M(I(V )) be the matrix representation w.r.t.I(V ). Then there exists an overall optimum hk; 1i-MSIRS for G if and only if thereexists a circular permutation of the rows of M(I(V )) such that each column has atmost k blocks of consecutive entries equal to 1.For the lower bounds on the number of intervals required by MSIRS, we havethe following lemma.Lemma17. Given G = (V;E), let M(P ) be the matrix representation w.r.t. P =f(v1; e1); : : : ; (vl; el)g � I(V ), and assume that, for any two rows ri and rj belongingto M(P ), dH(i; j) � 2t for some t > 0, where dH(i; j) is the Hamming distance ofrows ri and rj in M(P ). Then there is no overall optimum hk; 1i-MSIRS for G withk < dn�tl e.Proof. Considering the i-th column of M(P ) for any 1 � i � l, the blocks of 1'sseparated by 0's down the column `and around' precisely correspond to the intervalsassigned to the edge ei at vi by the scheme, assuming that nodes in V are labeledin this order. The number of blocks, and hence the number of intervals needed,is equal to half the number of occurrences of the patterns 01 and 10 down thecolumn and around. Since the number of occurrences of 01 is equal to the numberof occurrences of 10, using Hamming distances and summing up all columns givesa total of Pni=1 dH(i;(i+1)mod n)2 � n � t blocks. Hence there is a column in M(P)11
which has at least dn�tl e blocks, and the corresponding link ei must have at least thisnumber of labels at vi.The same argument applies if the nodes in V are labeled in any other way andthe rows of M(P ) are permuted accordingly. Hence any optimal overall hk; 1i-MIRSfor G must assign at least dn�tl e intervals to some link. utBy the above lemma and Lemma 1 the following corollary for general MIRS canbe derived immediately.Corollary 18. Given G = (V;E), let M(P ) be the matrix representation w.r.t. P =f(v1; e1); : : : ; (vl; el)g � I(V ), and assume that, for any two rows ri and rj belongingtoM(P ), dH(i; j) � 2t for some t > 0. Then there is no overall optimum hk; 1i-MIRSfor G with k < dn�tl e � 1.5.2 HypercubesWe have seen that there is a simple overall optimum h1; di-MIRS for hypercubes(Theorem 11). We now show that it is not possible to cover all shortest paths in theregular 1-IRS; in fact, we give a precise bound for the number of intervals required.Theorem19. There are no overall optimum hk; 1i-MSIRS and overall optimumhk � 1; 1i-MIRS for d-dimensional hypercubes Hd with k < d 2d�1d e.Proof. Given any node v 2 Hd, consider the matrix representation M(P ) w.r.t.P = f(v; ei) j 1 � i � dg, where ei is the link incident to v in the i-th dimension. Itis easy to see thatM(P ) consists of the 2d rows that are all possible strings of d bits,thus for all pairs of rows ri, rj , we have dH(i; j) � 1. Now by Lemma 17 there is nohk; 1i-MSIRS for Hd with k < d 2d� 12d e = d 2d�1d e. Similarly, by Corollary 18, there isno hk � 1; 1i-MIRS for Hd. utWe are now able to give upper bounds on the number of intervals required byhk; 1i-MIRS for Hd. Since the existence of a hk; 1i-MSIRS for a graph G alwaysimplies the existence of a hk; 1i-MIRS, we give the proofs for the strict case.Theorem20. There exists an overall optimum hk; 1i-MSIRS for Hd with k =d 2d�1d e.Proof. Consider the matrix representation M(I(V )) w.r.t. I(V ) and for each nodev let ei be its incident link in the i-th dimension. For any circular permutation ofthe rows �, let num(M(I(V )); �) be the maximum number of blocks of consecutiveentries equal to 1 over all the columns of M(I(V )).Notice that, whatever the circular permutation � is, all columns associated topairs (v; ei) for a �xed dimension i have the same number of consecutive blocksof entries equal to 1, since any two such columns are either identical or just thebit-complement of the other. Thus, for a given node v 2 Hd, with its submatrixM(P ) w.r.t. P = f(v; ei) j 1 � i � dg (recall that this matrix has for all of its 2drows all the possible strings of d bits) for each permutation �, num(M(I(V )); �) =num(M(P ); �).In [RC81] it has been proved that it is possible to permute rows of M(P ) in sucha way that num(M(P ); �) = d 2d�1d e. The theorem now follows from Lemma 16. ut12
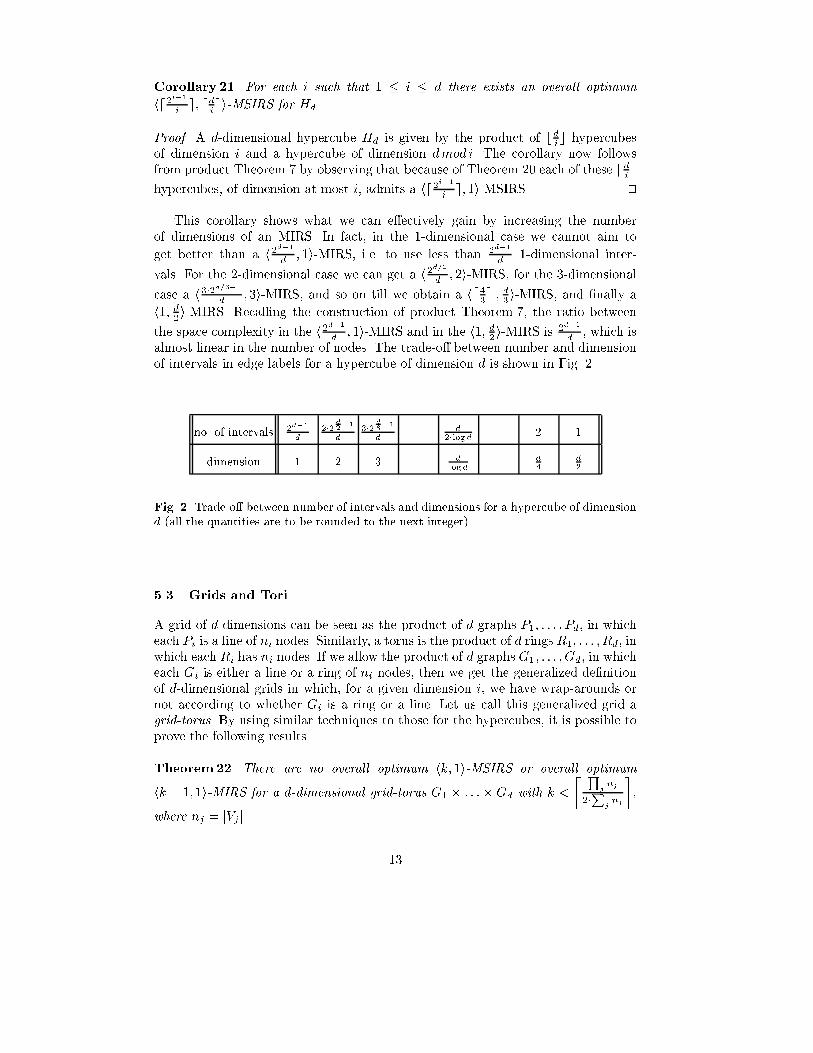
Corollary 21. For each i such that 1 � i � d there exists an overall optimumhd 2i�1i e; ddi ei-MSIRS for Hd.Proof. A d-dimensional hypercube Hd is given by the product of bdi c hypercubesof dimension i and a hypercube of dimension dmod i. The corollary now followsfrom product Theorem 7 by observing that because of Theorem 20 each of these ddi ehypercubes, of dimension at most i, admits a hd 2i�1i e; 1i-MSIRS. utThis corollary shows what we can e�ectively gain by increasing the numberof dimensions of an MIRS. In fact, in the 1-dimensional case we cannot aim toget better than a h 2d�1d ; 1i-MIRS, i.e. to use less than 2d�1d 1-dimensional inter-vals. For the 2-dimensional case we can get a h 2d=2d ; 2i-MIRS, for the 3-dimensionalcase a h 3�2d=3�1d ; 3i-MIRS, and so on till we obtain a h� 43� ; d3 i-MIRS, and �nally ah1; d2 i-MIRS. Recalling the construction of product Theorem 7, the ratio betweenthe space complexity in the h 2d�1d ; 1i-MIRS and in the h1; d2 i-MIRS is 2d�1d , which isalmost linear in the number of nodes. The trade-o� between number and dimensionof intervals in edge labels for a hypercube of dimension d is shown in Fig. 2.no. of intervals 2d�1d 2�2 d2�1d 3�2 d3�1d . . . d2�log d . . . 2 1dimension 1 2 3 . . . dlog d . . . d4 d2Fig. 2. Trade-o� between number of intervals and dimensions for a hypercube of dimensiond (all the quantities are to be rounded to the next integer).5.3 Grids and ToriA grid of d dimensions can be seen as the product of d graphs P1; : : : ; Pd, in whicheach Pi is a line of ni nodes. Similarly, a torus is the product of d rings R1; : : : ; Rd, inwhich each Ri has ni nodes. If we allow the product of d graphs G1; : : : ; Gd, in whicheach Gi is either a line or a ring of ni nodes, then we get the generalized de�nitionof d-dimensional grids in which, for a given dimension i, we have wrap-arounds ornot according to whether Gi is a ring or a line. Let us call this generalized grid agrid-torus. By using similar techniques to those for the hypercubes, it is possible toprove the following results.Theorem22. There are no overall optimum hk; 1i-MSIRS or overall optimumhk � 1; 1i-MIRS for a d-dimensional grid-torus G1 � : : : �Gd with k < � Qj nj2�Pj nj �,where nj = jVj j. 13

Proof. Let Gj = (Vj ; Ej) with Vj = fv0; : : : ; vnj�1g and Ej = f(vi; vi+1) j 0 � i �nj � 2g if Gj is a line or Ej = f(vi; v(i+1)modnj ) j 0 � i � nj � 1g if Gj is a ring.Consider the matrix representation M(P ) w.r.t. P = P1 [ : : : [ Pd, where Pj =f(v0;:::;ij ;:::;0; (v0;:::;ij ;:::;0; v0;:::;ij+1;:::;0)) j 0 � ij � nj � 2g if Gj is a line or Pj =f(v0;:::;ij ;:::;0; (v0;:::;ij ;:::;0; v0;:::;(ij+1)modnj ;:::;0)) j 0 � ij � nj � 1g if Gj is a ring.ThenM(P ) hasQj nj rows and at mostPj nj columns, and the theorem followsby Lemma 17 and Corollary 18 by observing that any two rows in M(P ) must di�erby at least one bit. utThe following corollary is a direct consequence of the previous theorem.Corollary 23. Given a d-dimensional grid-torus G1�: : :�Gd, where each jVj j = m,there are no overall optimum hk; 1i-MSIRS and no overall optimum hk � 1; 1i-MIRSwith k < dmd�12d e.Similar results on the upper bounds on the number of intervals required by theschemes for the grids-tori can now be proved.Theorem24. There exists an overall optimum hk; 1i-MIRS for grids-tori with k =Qdj=2 nj .Proof. Let us consider �rst the case of a d-dimensional grid G, and let Gj = (Vj ; Ej)with Vj = fv0; : : : ; vnj�1g and Ej = f(vi; vi+1) j 0 � i � nj � 2g. Now label eachnode vi1;:::;id with the integer i1 + n1 � i2 + n1 � n2 � i3 + : : : + n1 � nd�1 � id and let(u; v) be an edge along dimension j. Assume w.l.o.g. that u is labeled with a smallervalue than v. It is not hard to see that under the given labeling the labels of allnodes optimally reachable from u via edge (u; v) de�ne the following set of intervals(where i is the label of u):�d in1 � :: � nj�1 en1 � :: � nj�1 + k � n1 � :: � nj�1; d in1 � :: � nj en1 � :: � nj + k � n1 � :: � nj�1� ;with 0 � k � nj+1 �: : : �nd�d in1�:::�nj e, since (d in1�:::�nj e�k)n1 �: : : �nj�1 � n1 �: : :�nd.This implies that as many as nj+1 � : : : � nd distinct intervals can be necessary torepresent all nodes optimally reachable via (u; v).The cases for tori and grid-tori can be treated similarly to obtain the same bound.utIn the case in which each Gj has the same cardinality, we have the followingcorollary.Corollary 25. Given a d-dimensional grid-torus G1�: : :�Gd, where each jVj j = m,there exists an overall optimum hk; 1i-MIRS with k = md�1.For the multi-dimensional version, always in the case in which each Gj has thesame cardinality, we have the following corollary.Corollary 26. Given a d-dimensional grid-torus G1�: : :�Gd, where each jVj j = m,for each j such that 1 � j � d there exists an overall optimum hmj�1; ddj ei-MIRS.14

Proof. The d-dimensional grid-torus is given by the product of bdj c subgrids-tori ofdimension k and a grid-torus of dimension dmod j. The corollary follows now fromproduct Theorem 7 and Corollary 25. utAs in the case of hypercubes, this corollary states that by increasing the numberof dimensions it is possible to go from a hmd�1; 1i-MIRS to a h1; di-MIRS (see tablein Fig. 3). The ratio between the space complexity in the hmd�1d ; 1i-MIRS and in theh1; di-MIRS is md�1d , which is again almost linear in the number of nodes. Also thespace required by the h1; di-MIRS is the same as the one required by a 1-IRS schemefor the d-grid, but in the h1; di-MIRS all shortest paths between every pair of nodesare represented, while in the 1-IRS only a single shortest path between every pairis represented. Furthermore, 1-IRS only exists for grids with no wrap-around andcolumns (or rows, but not both) wrap-around [LT85, R88], whereas our results hereapply to any grid-torus with wrap or no wrap-around in any dimension.no. of intervals md�1 m d2�1 . . . m2 m 1dimension 1 2 . . . d3 d2 dFig. 3. Trade-o� between number of intervals and dimensions for a grid-torus of dimensiond, i.e., with md nodes (all the quantities are to be rounded to the next integer).6 Other ModelsThere are other possible variations of the model than the one we introduced inSection 2. We discuss a few of them below.6.1 CON ModelThe hk; di-MIRS model introduced in Section 2 can be considered as the DIS model,in the sense that to route a message to a destination label j = (j1; :::; jd), j must be inone of the k d-tuples of intervals (Disjunction) and then each ji; (1 � i � d) must bein each of the intervals. We could have easily considered the CON model instead. Inthis model there is only a single d-tuple of up to k intervals per coordinate. Routingin this model then requires each ji; (1 � i � d) (Conjunction) to be in one of the kintervals for each coordinate. We can de�ne formally the model as follows.Let I(k) be the universe of all k-sets of intervals in N, i.e. I(k) =ffi1; : : : ; ikgji1; : : : ; ik 2 Ig. Moreover let I(k) = [kj=1I(j). In a hk; di-MILS eachlink is then labeled with a value from Id(k), i.e. by a d-tuple of up to k intervals inN. A message with destination j = (j1; : : : ; jd) is then routed at each node on anyincident link with label (I1; : : : ; Id) (I1; : : : ; Id 2 I(k)) if for each i, 1 � i � d, thereexists some interval [aih ; bih ] 2 Ii such that aih � ji < bih with 1 � h � k.15
The di�erence of the two models recalls the di�erence between that of a formulain Disjunctive Normal Form and Conjunctive Normal Form. The following exampleillustrates the di�erence between the two models.Example 1. Let k = 2 and d = 3. The following represent link-labels on a node.DIS Model: f([3; 5]; [1; 4]; [5; 8]); ([1; 2]; [2; 5]; [1; 4])gThere are 2 tuples, each coordinate of the 3-tuple consists of only one interval.CON Model: (f[3; 5]; [1; 2]g; f[1; 4]; [2; 5]g; f[5; 8]; [1; 4]g)This consists only of one 3-tuple, but each coordinate has 2 intervals.Obviously all these models agree when d = 1 or k = 1, i.e. CON hk; 1i-MIRS= DIS hk; 1i-MIRS = k-IRS and CON h1; di-MIRS = DIS h1; di-MIRS. It followsthat almost all the results in Section 3 and Section 4 hold for both models. Wedo have to restate the construction of link-labels in the product graph a little bitdi�erently though. Instead of labeling the link with a ki d-tuples of intervals (DISmodel) we need to label the link with a d-tuple of ki intervals. More formally, foreach edge e = (vi1;:::;ij ;:::;id ; vi1;:::;i0j ;:::;id) 2 E in the product graph G, we label itwith the d-tuple of intervals (I1; :::; Ij ; :::; Id), where Ij = Iej is the set of intervalsassociated with the edge ej = (vij ; vi0j ) 2 Ej at node vij in the hki; dii-MIRS ofsubgraph Gj , and Is = [1; ns] for each s 6= j, 1 � s � d.Then the product Theorem 7 holds. Also all the results in Section 5 on thetrade-o�s between k and d for hypercubes and grids-tori work for both models, asthe results depend only on the product Theorem 7.In general, the models are not the same however and there is a trade-o� betweenthem.Theorem27. For k; d � 1, if a graph G has a CON hk; di-MIRS then it has aDIS hkd; di-MIRS.Proof. Let G have a CON hk; di-MIRS, then for any node u and any incident link(u; v) there exists a set of d-tuples of up to k intervals such that for each node w withlabel (i1; i2; : : : ; id) there exists a shortest path from u to w through v i� for each jthe integer ij is contained in one of the corresponding k intervals which constitutethe j-th component of the d-tuple. This is equivalent to saying that there existsa boolean formula in Conjunctive Normal Form associated to the same node-linkpair with the following structure F1 = ^di=1(li1 _ li2 _ : : : _ lik) where li denotes anelementary predicate referring to the inclusion of an integer in an interval on thei-th dimension. An equivalent DIS scheme will refer to a Disjunctive Normal Formformula with structure F2 = _�i=1(l1i ^ l2i ^ : : : ^ l�i ), with suitable k0 (number ofintervals) and d0 (number of dimensions). F2 can be derived from F1 by distributingthe _ operator over the ^ operator. This results in a formula with k0 = kd clausesof d0 = d literals, that is in a hkd; di-MIRS scheme. utThe converse of Theorem 27 in general does not hold. We have seen however thatfor such interconnection networks as hypercubes and grids-tori there is no need fortrade-o�. 16

7 Conclusion and Open ProblemsWe have introduced multi-dimensional Interval Routing schemes, which general-ize the standard Interval Routing schemes to higher dimensions. With the multi-dimensional schemes we improve the routing schemes to include all shortest pathsfor some standard interconnection networks such as d-grids, d-tori and d-hypercubes.This is achieved with e�cient space complexity.There are still many unresolved problems with hk; di-MIRS. We list here someopen problems for future research.1. Study hk; di-MIRS for other interconnection networks.2. The NP-Hard result stated in this paper is for the case of weighted links only.This should hold true for the uniform cost link also.3. The trade-o� between the number of intervals k and dimensions d are statedin this paper for hypercubes, grids and tori. It would be nice to obtain similarresults for other graphs also. A general result between k and d for arbitrarygraphs would be quite desirable.References[ABLP89] B. Awerbuch, A. Bar-Noy, N. Linial, and D. Peleg, Compact Distributed DataStructures for Adaptive Routing, Proc. 21st ACM Symp. on Theory of Comput-ing (1989), pp. 479{489.[ABLP90] B. Awerbuch, A. Bar-Noy, N. Linial, and D. Peleg, Improved Routing Strategieswith Succinct Tables. Journal of Algorithms, 11 (1990), pp. 307{341.[AL81] B. Arden and H. Lee, Analysis of Chordal Ring Network, IEEE Transaction onComputers,30 (1981), pp. 291{294.[BLT94] E. M. Bakker, J. van Leeuwen and R. B. Tan, Some Characterization Results inCompact Routing Schemes, Manuscript (1994).[BLT91] E. M. Bakker, J. van Leeuwen and R. B. Tan, Linear Interval Routing Schemes,Tech. Rep. RUU-CS-91-7, Dept. of Computer Science, Utrecht University (1991).Also in: Algorithms Review 2 (2) (1991), pp. 45{61.[F95] M. Flammini, Compact Routing Models: Some Complexity Results and Exten-sions, Ph. D. Thesis, Dept. of System and Computer Science, University of Rome\La Sapienza", 1995.[FGS93] M. Flammini, G. Gambosi and S. Salomone, Boolean Routing, Proc. 7th Interna-tional Workshop on Distributed Algorithms (WDAG'93), Springer-Verlag LNCS725 (1993), pp. 219{233.[FGS94] M. Flammini, G. Gambosi and S. Salomone, On Devising Boolean RoutingSchemes, Proc. 21st International Workshop on Graph-Theoretic Concepts inComputer Science (WG'95), Springer-Verlag LNCS 1017 (1995); full version toappear in Theoretical Computer Science.[FGS95] M. Flammini, G. Gambosi and S. Salomone, Interval Routing Schemes, Proc.12th Symp. on Theoretical Aspects of Computer Science (STACS'95), Springer-Verlag LNCS 900 (1995), pp. 279{290; full version to appear in Algorithmica.[FLM95] M. Flammini, J. van Leeuwen and A. Marchetti Spaccamela, The Complexityof Interval Routing on Random Graphs, Proc. 20th Symposium on MathematicalFoundation of Computer Science (MFCS'95), Springer-Verlag LNCS 969 (1995),pp. 37{49. 17
[FJ86] G. N. Frederickson and R. Janardan, Optimal Message Routing Without Com-plete Routing Tables, Proc. 5th Annual ACM Symposium on Principles of Dis-tributed Computing (1986), pp. 88{97. Also as: Designing Networks with Com-pact Routing Tables, Algorithmica 3 (1988), pp. 171{190.[FJ89] G. N. Frederickson and R. Janardan, E�cient Message Routing in Planar Net-works, SIAM Journal on Computing 18 (1989), pp. 843{857.[FJ90] G. N. Frederickson and R. Janardan, Space E�cient Message Routing in c-Decomposable Networks, SIAM Journal on Computing 19 (1990), pp. 164{181.[HKR91] H. Hofest�adt, A. Klein and E. Reyzl, Performance Bene�ts from Locally AdaptiveInterval Routing in Dynamically Switched Interconnection Networks, Proc. 2ndEuropean Distributed Memory Computing Conference (1991), pp. 193{202.[I91] The T9000 Transputer Products Overview Manual, Inmos (1991).[KKR93] E. Kranakis, D. Krizanc and S. S. Ravi, On Multi-Label Linear Interval RoutingSchemes, in: J. van Leeuwen (Ed.), Graph-Theoretic Concepts in Computer Sci-ence (WG'93), Proceedings 19th International Workshop, Springer-Verlag LNCS790 (1993), pp. 338{349.[LT83] J. van Leeuwen and R. B. Tan, Routing with Compact Routing Tables, Tech.Rep. RUU-CS-83-16, Dept. of Computer Science, Utrecht University (1983). Alsoas: Computer Networks with Compact Routing Tables, in: G. Rozenberg and A.Salomaa (Eds.) The Book of L, Springer-Verlag, Berlin (1986), pp. 298{307.[LT85] J. van Leeuwen and R. B. Tan, Interval Routing, Tech. Rep. RUU-CS-85-16,Dept. of Computer Science, Utrecht University (1985). Also in: Computer Jour-nal 30 (1987), pp. 298{307.[LT94] J. van Leeuwen and R. B. Tan, Compact Routing Methods: A Survey, Proc. Col-loquium on Structural Information and Communication Complexity (SICC'94),Carleton University Press (1994).[MT90] D. May and P. Thompson, Transputers and Routers: Components for ConcurrentMachines, Inmos (1990).[PU89] D. Peleg, E. Upfal. A trade{o� between space and e�ciency for routing tables.Journal of the ACM, 36 (3) (1989), pp. 510{530.[R88] P. Ru�zi�cka, On E�ciency of Interval Routing Algorithms, in: M.P. Chytil, L.Janiga, V. Koubek (Eds.), Mathematical Foundations of Computer Science 1988,Springer-Verlag LNCS 324 (1988), pp. 492{500.[RC81] J. P. Robinson and M. Cohn. Counting Sequences, IEEE Transactions on Com-puters, C-30 (1) (1981), pp. 17{23.[SK82] N. Santoro and R. Khatib, Routing Without Routing Tables, Tech. Rep. SCS-TR-6, School of Computer Science, Carleton University (1982). Also as: Labellingand Implicit Routing in Networks, Computer Journal 28 (1) (1985), pp. 5{8.
18




















