Multi-objective reliability-based optimization of prestressed concrete beams
9
Multiobjective reliability-based optimization for design of a vehicle door Jianguang Fang a , Yunkai Gao a,n , Guangyong Sun b,nn , Qing Li c a School of Automotive Studies, Tongji University, Shanghai 201804, China b State Key Laboratory of Advanced Design and Manufacture for Vehicle Body, Hunan University, Changsha 410082, China c School of Aerospace, Mechanical and Mechatronic Engineering, The University of Sydney, Sydney, NSW 2006, Australia article info Article history: Received 27 April 2012 Received in revised form 19 November 2012 Accepted 20 November 2012 Available online 2 January 2013 Keywords: Multiobjective reliability-based design optimization Automotive door Response surface method Probabilistic sufficiency factor Uncertainty abstract Structural optimization for vehicle door signifies one of the key topics of research to continuously improve its performances. However, majority of the studies to date have not considered uncertainties whilst it has been known that a deterministic optimization may lead to an unreliable design in practice. In this paper, a multiobjective reliability-based design optimization (MORBDO) procedure is proposed to explore the design of vehicle door. To improve the efficiency of optimization, response surface method (RSM) is used to replace the time-consuming finite element simulations. In conjunction with Monte Carlo simulation and descriptive sampling technique, probabilistic sufficiency factor is adopted as a design constraint. The multiobjective particle swarm optimization (MOPSO) algorithm is employed to perform the optimization. The results demonstrate that the proposed optimization procedure is capable of generating a well-distributed Pareto frontier of reliable solutions, and it is suggested to select an optimum from relative insensitive regions. Moreover, the influence of varying the uncertainty and increasing the target reliability level in the optimization results is analyzed, which provided decision- makers with insightful design information. & 2012 Elsevier B.V. All rights reserved. 1. Introduction Being an indispensable assembly of an automotive body, vehicle door serves as a key supporting component for functional accessories and sound insulation in occupant compartment. Poor performances of a door would lead to lots of functional problems such as bad sealing, abnormal sounds and severe intrusion in crashing. For this reason, structural optimization of a vehicle door has become one of the major concerns in automotive engineering. For example, Shin et al. [1] suggested a design procedure by integrating topology, shape and size optimization and design of experiments (DoE) to develop door structure for better stiffness and natural frequency. Song and Park [2] employed multi- disciplinary optimization (MDO) with multicriteria for weight reduction of a door made of a tailored blank. Lee and Kang [3] combined the Kriging interpolation method with a simulated annealing algorithm for design of frontal door. Zhu et al. [4] integrated finite element analysis (FEA), artificial neural network, and genetic algorithm for optimal design of an inner door panel. Cui et al. [5] developed multi-material configuration for light- weight design by combining a multiobjective genetic algorithm with an artificial neural network. These above-mentioned studies on structural optimization of vehicle doors are restricted to deterministic optimization, in which all design variables and parameters involved are regarded certain. In real world, a design optimization may not afford to neglect uncertainties, which can largely exist in material proper- ties, geometries and manufacturing precision, etc. In effect, the optimum obtained from a deterministic optimization could easily violate the imposed constraints and cause unreliable solutions [6–8]. In order to take into account various uncertainties, reliability-based design optimization (RBDO) was introduced and has drawn increasing attention recently. Compared with deterministic optimization, RBDO aims to seek a reliable opti- mum by converting the deterministic constraints into probabil- istic counterparts, in which failure probability is restricted to a pre-defined level. In this regard, Zhang and Liu [9] employed the second moment and reliability-based design theory to present a practical and effective method for the reliability-based design of automobile components. Acar and Solanki [10] performed vehicle RBDO for crashworthiness and analyzed the effect of reliability allocation on different failure modes. Song et al. [11] generated RBDO for an automotive knuckle component under different conditions, where a constraint-feasible moving least square method was used for modelling functional inequality constraint. d’Ippolito et al. [12] utilized the RBDO methodology to optimize the reliability of a vehicle knuckle for fatigue life, where the variability in the material parameters were considered. Ju and Lee [13] developed a Kriging metamodel for an active constraint Contents lists available at SciVerse ScienceDirect journal homepage: www.elsevier.com/locate/finel Finite Elements in Analysis and Design 0168-874X/$ - see front matter & 2012 Elsevier B.V. All rights reserved. http://dx.doi.org/10.1016/j.finel.2012.11.007 n Corresponding author. Tel./fax: þ86 21 6958 9845. nn Corresponding author. Tel.: þ86 731 8882 2051; fax: þ86 731 8881 1445. E-mail addresses: [email protected] (Y. Gao), [email protected] (G. Sun). Finite Elements in Analysis and Design 67 (2013) 13–21
Transcript of Multi-objective reliability-based optimization of prestressed concrete beams

Finite Elements in Analysis and Design 67 (2013) 13–21
Contents lists available at SciVerse ScienceDirect
Finite Elements in Analysis and Design
0168-87
http://d
n Corrnn Cor
E-m
journal homepage: www.elsevier.com/locate/finel
Multiobjective reliability-based optimization for design of a vehicle door
Jianguang Fang a, Yunkai Gao a,n, Guangyong Sun b,nn, Qing Li c
a School of Automotive Studies, Tongji University, Shanghai 201804, Chinab State Key Laboratory of Advanced Design and Manufacture for Vehicle Body, Hunan University, Changsha 410082, Chinac School of Aerospace, Mechanical and Mechatronic Engineering, The University of Sydney, Sydney, NSW 2006, Australia
a r t i c l e i n f o
Article history:
Received 27 April 2012
Received in revised form
19 November 2012
Accepted 20 November 2012Available online 2 January 2013
Keywords:
Multiobjective reliability-based design
optimization
Automotive door
Response surface method
Probabilistic sufficiency factor
Uncertainty
4X/$ - see front matter & 2012 Elsevier B.V.
x.doi.org/10.1016/j.finel.2012.11.007
esponding author. Tel./fax: þ86 21 6958 984
responding author. Tel.: þ86 731 8882 2051;
ail addresses: [email protected] (Y. Gao
a b s t r a c t
Structural optimization for vehicle door signifies one of the key topics of research to continuously
improve its performances. However, majority of the studies to date have not considered uncertainties
whilst it has been known that a deterministic optimization may lead to an unreliable design in practice.
In this paper, a multiobjective reliability-based design optimization (MORBDO) procedure is proposed
to explore the design of vehicle door. To improve the efficiency of optimization, response surface
method (RSM) is used to replace the time-consuming finite element simulations. In conjunction with
Monte Carlo simulation and descriptive sampling technique, probabilistic sufficiency factor is adopted
as a design constraint. The multiobjective particle swarm optimization (MOPSO) algorithm is employed
to perform the optimization. The results demonstrate that the proposed optimization procedure is
capable of generating a well-distributed Pareto frontier of reliable solutions, and it is suggested to select
an optimum from relative insensitive regions. Moreover, the influence of varying the uncertainty and
increasing the target reliability level in the optimization results is analyzed, which provided decision-
makers with insightful design information.
& 2012 Elsevier B.V. All rights reserved.
1. Introduction
Being an indispensable assembly of an automotive body,vehicle door serves as a key supporting component for functionalaccessories and sound insulation in occupant compartment. Poorperformances of a door would lead to lots of functional problemssuch as bad sealing, abnormal sounds and severe intrusion incrashing. For this reason, structural optimization of a vehicle doorhas become one of the major concerns in automotive engineering.For example, Shin et al. [1] suggested a design procedure byintegrating topology, shape and size optimization and design ofexperiments (DoE) to develop door structure for better stiffnessand natural frequency. Song and Park [2] employed multi-disciplinary optimization (MDO) with multicriteria for weightreduction of a door made of a tailored blank. Lee and Kang [3]combined the Kriging interpolation method with a simulatedannealing algorithm for design of frontal door. Zhu et al. [4]integrated finite element analysis (FEA), artificial neural network,and genetic algorithm for optimal design of an inner door panel.Cui et al. [5] developed multi-material configuration for light-weight design by combining a multiobjective genetic algorithmwith an artificial neural network.
All rights reserved.
5.
fax: þ86 731 8881 1445.
), [email protected] (G. Sun).
These above-mentioned studies on structural optimization ofvehicle doors are restricted to deterministic optimization, inwhich all design variables and parameters involved are regardedcertain. In real world, a design optimization may not afford toneglect uncertainties, which can largely exist in material proper-ties, geometries and manufacturing precision, etc. In effect, theoptimum obtained from a deterministic optimization could easilyviolate the imposed constraints and cause unreliable solutions[6–8]. In order to take into account various uncertainties,reliability-based design optimization (RBDO) was introducedand has drawn increasing attention recently. Compared withdeterministic optimization, RBDO aims to seek a reliable opti-mum by converting the deterministic constraints into probabil-istic counterparts, in which failure probability is restricted to apre-defined level. In this regard, Zhang and Liu [9] employed thesecond moment and reliability-based design theory to present apractical and effective method for the reliability-based design ofautomobile components. Acar and Solanki [10] performed vehicleRBDO for crashworthiness and analyzed the effect of reliabilityallocation on different failure modes. Song et al. [11] generatedRBDO for an automotive knuckle component under differentconditions, where a constraint-feasible moving least squaremethod was used for modelling functional inequality constraint.d’Ippolito et al. [12] utilized the RBDO methodology to optimizethe reliability of a vehicle knuckle for fatigue life, where thevariability in the material parameters were considered. Ju and Lee[13] developed a Kriging metamodel for an active constraint

J. Fang et al. / Finite Elements in Analysis and Design 67 (2013) 13–2114
strategy to overcome the difficulties of implementing themoment method in RBDO, in which three numerical exampleswere studied and the efficiency and accuracy were validated.Nevertheless, structural optimization for a vehicle door consider-ing the uncertainty remains under reported in literature to date.
Moreover, real-life engineering problems are typically character-ized by a number of quality/performance indices and cost/weight,some of which could conflict with each other. For this reason, anappropriate trade-off between the mass and the performanceindices should be made using multiobjective optimization (MOO)[14–16]. Instead of seeking a unique optimal solution, MOO typicallyobtains a Pareto frontier amongst the conflicting objectives, therebyproviding decision-makers with more insightful design data forjustification. To address such real-world MOO engineering problemswith certain reliability to uncertainty, some attempts have beenmade. For instance, Barakat et al. [17] presented a general approachfor conducting multiobjective reliability-based design optimization(MORBDO) of prestressed concrete beams, using e-constraintmethod. Sinha [18] applied MORBDO to crashworthiness design ofvehicle under side impact. Khakhali et al. [19] conducted reliability-based robust multiobjective optimization for S-shaped box beams tomaximize the energy-absorbing capacity with uncertainties.Lin et al. [20] developed a systematic approach for identifying theb-Pareto set for bi-objective optimization problems involving para-metric randomness in vehicle design. Daskilewicz et al. [21] studiedthe effects of uncertainty in MOO in conceptual design of aircraft bydemonstrating the changes in Pareto frontiers induced by variabilityin disciplinary metrics and differences in formulation of probabilisticdesign problem. Deb et al. [22] combined traditional reliabilityoptimization techniques with evolutionary multiobjective optimiza-tion (EMO) for better handling uncertainties of variables andparameters, in which vehicle design under side-impact problemwas considered.
This paper takes into account both MOO and RBDO andpresents a methodology of MORBDO for optimizing door struc-ture. For this purpose, a simple approach, namely Monte Carlosimulation (MCS) technique, is adopted to generate the date forprobabilistic constraints. MCS is able to explore a probabilisticbehavior with high accuracy regardless of problem complexity.However, it could become computationally expensive whenapplied to optimization, especially involving multiobjectives[19]. In addition, probabilistic behavior generated from MCS canbe numerically noisy [10] and may provide false information forthe subsequent optimization. To tackle these two problems,response surface method (RSM) is implemented to approximatesuch performance indices as stiffness. In this study, probabilisticsufficiency factor (PSF) is employed as the probabilistic constraintfor the sake of accuracy of response surfaces. A multiobjectiveparticle optimization (MOPSO) algorithm is adopted to generatewell-distributed Pareto solutions.
2. Methodology
2.1. Multiobjective reliability-based design optimization (MORBDO)
A deterministic multiobjective optimization problem can beformulated as follows:
min FðxÞ ¼ f 1ðxÞ,f 2ðxÞ,. . .,f iðxÞ,. . .� �
, i¼ 1,2,. . .,mð Þ
s:t: gjðxÞr0, j¼ 1, 2,. . ., nð Þ
xLrxrxU
8><>: ð1Þ
where x denotes a t-dimensional vector of design variables, xL
denotes the lower bound and xU the upper bound. f iðxÞ and gjðxÞare the ith objective function and jth constraint function,
respectively. Since there is no uncertainty considered, it is nameddeterministic optimization.
Different from the deterministic optimization, reliability-based design optimization (RBDO) uses the probabilistic con-straints to take into account uncertainty in the design variablesand parameters, thereby ensuring that desirable performance ismet under a certain probability. Defining gjðxÞ r 0 as a saferegion, a MORBDO problem can be thus formulated as
min FðxÞ ¼ f 1ðxÞ,f 2ðxÞ,. . .,f iðxÞ,. . .� �
, i¼ 1,2,. . .,mð Þ
s:t: Pðgj xð Þr0ÞZR, j¼ 1,2,. . .,nð Þ
xLrxrxU
8><>: ð2Þ
where P Uð Þ represents the probability and R is the desiredreliability level.
2.2. Monte Carlo simulation
The problem defined in Eq. (2) involves a procedure to obtainthe values of probabilistic constraints. One of the robust yetsimple approaches could be Monte Carlo simulation. Based onthe theory of large numbers, the Monte Carlo simulation allowsdetermining an estimate of the probability of success as follows
PðgjðxÞ r 0 Þ ¼1
N
XN
i ¼ 1
IðxÞ ð3Þ
where N is the total number of MCS and IðxÞ is an indicatorfunction defined as
IðxÞ ¼1 if gjðxÞ r 0
0 if gjðxÞ 4 0
(ð4Þ
Note that in Eq. (3), N independent sets of design variables areobtained from sampling techniques on the basis of the probabilitydistribution for each random variable. A simple use of randomsampling usually requires much more than a desirable number ofsample points and is often impractical for complex and time-consuming analyses. To achieve high accuracy of the statisticaldescription of the system behavior, a descriptive sampling method[23–26] is used in this study. Descriptive sampling is based on adeterministic selection of the input values and their random permu-tation. Symbolically, it follows that descriptive sampling¼deterministic
set� random sequence while simple random sampling¼random set �
random sequence. Thus, the generation of a descriptive sampleconsists of two steps: (1) the generation of a descriptive set of valuesand (2) the random permutation of those values. More detailsregarding descriptive sample can be found in literature [23,24]. Thissampling technique is one of the variance reduction techniques,allowing to reduce the variance of the statistical estimates derivedfrom the Monte Carlo simulation data. As a result, fewer points areneeded to obtain error or confidence levels.
2.3. Probabilistic sufficiency factor
The probability of success (P gjðx� �
r0 Þ , as defined in Eq. (2)),is not a unique form of probabilistic constraints and can betransformed into other forms, such as reliability index or prob-abilistic sufficiency factor (PSF) [27,28]. It has proven that PSF hasa higher accuracy for establishing design response surface (DRS).
The constraints of any deterministic design optimization canbe typically expressed as,
gðxÞ r 0
gðxÞ ¼ grðxÞ�gtðxÞ
(ð5Þ
where grðxÞ and gtðxÞ represent the response and correspondingtarget (i.e., upper limit), respectively.

J. Fang et al. / Finite Elements in Analysis and Design 67 (2013) 13–21 15
In deterministic optimization, the constraint can be reformu-lated as sðxÞZ1, where sðxÞ denotes the factor of safety, defined as,
sðxÞ ¼ sLðxÞ ¼gtðxÞ
grðxÞð6Þ
Taking the lateral stiffness of vehicle door as an example, theupper limit of displacement at the loading point is set as 2.86 mmin this study. If the corresponding value of a design is 2.90 mm,then the safety factor is 0.986(¼2.86/2.90), violating theconstraint.
For an optimization problem with a lower limit, the factor ofsafety can be defined as,
sðxÞ ¼ sUðxÞ ¼grðxÞ
gtðxÞð7Þ
In this study, the first natural frequency of the vehicle door hasa lower limit of 40.45 Hz. If the corresponding value of a design is41.00 Hz, the factor of safety is 1.014(¼41.00/40.45), satisfyingthe constraint.
In RBDO, the corresponding constraint can be transformed intothe probabilistic expression as:
P sðxð Þ Z 1 Þ ZR ð8Þ
Probabilistic sufficiency factor (PSF) can be thus defined as thevalue of the safety factor, which should have a reliability levelgreater than R as,
P sðxð ÞZ PSF Þ ZR ð9Þ
PSF can be easily calculated using MCS. The safety factors forthe N samplings are ranked in an ascending order and have such asequence as s1,s2,:::,sNf g, siosiþ1 (i¼1, 2,y,N). Then, the PSFcan be obtained from
PSF ¼ sk ð10Þ
where N 1�Rð Þ�1okrN 1�Rð Þ.When the optimization problem has multiple (p) constraints,
the most critical safety constraint is calculated as PSF:
PSF ¼ minp
j ¼ 1ðsk, jÞ ð11Þ
Note that PSFZ1 means that the reliability level is equal to orhigher than the target, and thus the design meets or exceeds theprescribed safety requirements. Therefore, it can replace theconstraints in Eq. (2).
2.4. Response surface method
In engineering design, direct coupling of optimization algorithmwith simulation model may be inefficient since iterative analysesduring optimization usually require enormous iterations and highcomputational cost, especially for a MORBDO problem. As a result,the techniques using meta-models or surrogate models appeareffective to replace costly simulations for optimization [29–32].This approach establishes an implicit mathematical relationshipbetween design variables and functional responses with a moder-ate number of finite element analysis (FEA) runs. In practice,surrogate modeling starts with training data at sampling points,in which design of experiment (DoE) is often used to selectsampling points in a more efficient way. In this paper, the optimalLatin Hypercube sampling (OLHS) algorithm [6,7,18,33–35] isimplemented to generate initial sample data.
Response surface (RS) model is one of the simplest and mostpopular surrogate models. As an effective alternative to FEA, RSmodel has been widely adopted in design optimization[6,7,33,35–40]. Mathematically the first and second order RS
metamodels can be, respectively, written as:
y¼ aþXt
i ¼ 1
bixi ð12Þ
y¼ aþXt
i ¼ 1
bixiþXt
i ¼ 1
ciix2i þ
Xt
i ¼ 1
Xt
io j
dijxixj ð13Þ
where xi (i¼1, 2,y,t) denote the design variables that determine
response y, a, bi, cii and dij are the estimated regression coefficients,
obtained from the least square method. The cross product termsxixj represent two-parameter interactions and the square terms
x2i represent the second order nonlinearity.
Similarly, the third and fourth order response surface modelscan be expressed, respectively, as:
y¼ aþXt
i ¼ 1
bixiþXt
i ¼ 1
ciix2i þ
Xt
i ¼ 1
Xt
io j
dijxixjþXt
i ¼ 1
eiix3i ð14Þ
y¼ aþXt
i ¼ 1
bixiþXt
i ¼ 1
ciix2i þ
Xt
i ¼ 1
Xt
io j
dijxixjþXt
i ¼ 1
eiix3i þ
Xt
i ¼ 1
f iix4i
ð15Þ
In this paper, two sets of response surfaces are established,which are referred to the analysis response surface (ARS) anddesign response surface (DRS), respectively [27]. ARS can replacethe FE simulations of the door stiffness for optimization. Despiteuse of ARS, the evaluation of the probabilistic constraint is stillcomputationally costly during optimization process. Thus, DRS isestablished to approximate the probabilistic constraint PSF whichis obtained from MCS based on ARS at each DoE sampling point.
After response surfaces are established, their accuracy shouldbe assessed. For better evaluation of the modeling accuracy,additional confirmation sample points are generated. Threemetrics adopted herein are R-square, relative average absoluteerror (RAAE), and relative maximum absolute error (RMAE)[34,41], respectively, as,
R2¼ 1�
Pqi ¼ 1 yi�yi
� �2
Pqi ¼ 1 yi�y
� �2ð16Þ
RAAE¼
Pqi ¼ 1 yi�yi
�� ��Pqi ¼ 1 yi�y
�� �� ð17Þ
RMAE¼maxf yi�y1
�� ��,:::, yi�yq
�� ��gPqi ¼ 1 yi�y
�� ��=qð18Þ
where yi denotes the exact function value at confirmation point i,yi is the corresponding surrogate value. y is the mean of yi, q is thenumber of the confirmation points. In general, a larger value ofR-square and a smaller value of RAAE are preferred, whichindicate a higher accuracy for overall performance in the designspace. On the other hand, a larger RMAE value indicates lessaccuracy in one region of the design space even though a verygood global measurements can be given by R-square and RAAE. Inoptimization applications, we usually focus on the global beha-vior and thus more emphasis is placed on the first two metrics.
2.5. Multiobjective particle swarm optimization (MOPSO) algorithm
Particle swarm optimization (PSO) algorithm [42] is a rela-tively new heuristic algorithm inspired by the choreography of abird flock. As an extended version of PSO, Multiobjective particleswarm optimization (MOPSO) algorithm is characterized by fastconvergence and well-distributed Pareto frontier compared withother multiobjective optimization algorithms such as NSGA-II
J. Fang et al. / Finite Elements in Analysis and Design 67 (2013) 13–2116
[15], PEAS and microGA etc. [43–45]. MOPSO was employedsuccessfully to solve the design problems of sheet metal forming[34] and crashworthiness for functionally graded foam-filledstructures [46]. In this paper, the MOPSO proposed by Coelloet al. [43] is utilized to handle the MORBDO problem.
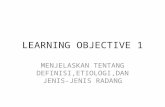
For clarification, the proposed optimization procedure is sum-marized in the flowchart as Fig. 1. It should be noted that if eitherthe accuracies of DRS and ARS based on the initial OLHS isunacceptable or the final optimum obtained cannot be validatedby the further FEA, the procedure should be returned to the DoEstep and more sampling points will be generated in addition to theexisting sample points in which a max-min distance criterion [47]is used in order to insert the new points to the existing sample
MORBDO mathematic model
Design of experiment
Analysis response surfaces
Monte Carlo simulation for each DoE point
Accuracy acceptable?
Probabilistic sufficiency factor
Design response surface
multi-objective particle swarm optimization algorithm
Obtain optimal designs
end
start
No
Yes
Accuracy acceptable?No
Yes
Validate the optimal designs
Acceptable?
Reliable Pareto solution set
Add more training points
No
Yes
Fig. 1. Flowchart of the proposed MORBDO procedure.
Fig. 2. Loading conditions for stiffness analyses of the vehicle door s
space. Given the existing sample set XP (s samples), the max-mindistance approach will select a new sample set XC
(t samples) to maximize the minimum distance between any twosample points in the total sample set XA ¼XP [ XC , i.e.,
max minxCi axAj
1r ir s,1r jr sþ tðdðxCi,xAjÞÞ
" #, ð19Þ
where xCiAXC i¼ 1,:::,sð Þ and xAiAXA j¼ 1,:::,sþtð Þ.
3. Design optimization of vehicle door
3.1. Finite element modeling and experimental validation
As a critical and independent part assembled to the vehiclebody, the door structure requires high stiffness to carry out itsfunctions. Similarly to [5], the FEA models of a vehicle door,subjected to three load conditions, were established as illustratedin Fig. 2. The finite element models are run in commercial codeMSC.NASTRAN. The panels are modeled with CQUAD and CTRIAsurface elements. The panel material is steel, which is modeled as alinear elastic material model MAT1. For connectivity, NASTRANPSOLID and CWELD elements are used to model the glue and weldspots, respectively. The entire FEA model has 89,043 elements and546,912 degrees of freedom.
For both upper and lower lateral stiffness, as shown inFig. 2(a) and (b), the hinges are fully restrained except for roll rotationand the latch is fully restrained, and at the same time two y-directional forces (F1¼F2¼200 N) are applied to the lower and upperlocations, respectively. For the vertical sag stiffness, as shown inFig. 2(c), the hinges are fully restrained except for roll rotation and avertical force (F3¼750 N) is applied at the latch that is fixed in thelateral translation. The stiffness is evaluated in terms of the displace-ments at the loading point. In addition, load condition 4 is defined toperform modal analysis with the free-free boundary condition tocalculate the door’s first natural frequency. The CPU time of a singlesimulation is approximately 51 s for the stiffness constraints, andapproximately 6 min and 12 s for the modal analysis.
Although computer aided engineering allows analyzing mechan-ical responses of vehicle door with a considerable accuracy, thenumerical models still need to be verified before making use of themreliably. In this regard, it is critical to validate the simulation resultsby using physical tests prior to an effective design optimization. Inthis study, the validation of FEA model was conducted by comparingthe simulation results with the corresponding experimental results.Fig. 3 shows the setups of physical tests, whose four loadingconditions are identical to the simulations. The correlation resultsare summarized in Table 1. It is seen that overall all the simulationresults agree well with the corresponding experimental results bothin the means and deviations. The results of the standard deviationsare not as good as those of the means, but this is probably becauseinsufficient samples of physical doors tested (i.e., 10 doors with thesame nominal design in this study) may not be able to capture thestandard deviations adequately, whilst stochastic FEA is done byrandomly changing panel thicknesses with descriptive sampling
tructure. (a) lower lateral; (b) upper lateral and (c) vertical sag.

Fig. 3. Experimental tests of the door stiffness. (a) lower lateral; (b) upper lateral; (c) vertical sag and (d) natural frequency.
Table 1Result comparison between simulations and physical tests.
Mean Standard deviation
Simulation Experiment Difference (%) Simulation Experiment Difference (%)
Mass f1(x) 22.13 kg 22.20 kg �0.32 0.5117 0.4903 4.36
Vertical sag f2(x) 4.49 mm 4.53 mm �0.88 0.1391 0.1511 �7.94
Upper lateral g1(x) 2.86 mm 2.83 mm 1.06 0.0710 0.0794 �10.58
Lower lateral g2(x) 1.67 mm 1.68 mm �0.60 0.0362 0.0381 �4.99
Natural frequency g3(x) 40.45 Hz 40.71 Hz �0.64 0.6234 0.6824 �8.65
J. Fang et al. / Finite Elements in Analysis and Design 67 (2013) 13–21 17
(sample size¼50) whose sample size is substantially larger. Throughcomparing the simulations with physical tests, the FE models areconsidered accurate and effective for the subsequent design optimi-zation, and the mean performances of the simulations are consideredas a baseline design.
3.2. Definition of optimization problem
Of all the stiffness indices, vertical sag stiffness can largelyinfluence operation condition of door’s opening and closing, and itis closely relevant to customers’ subjective perception towards theproduct quality. Therefore, the vertical sag stiffness is maximizedand at the same time the structural mass is minimized, whilstmaintaining certain levels of other stiffness indices. The determi-nistic multiobjective optimization problem for door structure isthus specifically formulated as follows:
MinFðxÞ ¼ ½f 1ðxÞ,f 2ðxÞ�
s:t:
g1ðxÞZ40:45
g2ðxÞr2:86
g3ðxÞr1:67
xLrxrxU
8>>><>>>:
8>>>>>><>>>>>>:
ð20Þ
The corresponding reliability-based optimization problem canbe defined by converting the deterministic constraints intoreliability constraints as:
MinFðxÞ ¼ f 1ðxÞ,f 2ðxÞ� �
s:t:PSFZ1
xLrxrxU
(8>><>>: ð21Þ
In this study, thicknesses of six panels in Fig. 4 are selected asthe designs variables. It is assumed that variations of thesedesigns variables are normally distributed and their ranges andcoefficients of variation (CoVs) are listed in Table 2. The detailedsettings of MOPSO used in this paper are provided in Table 3.
We adopt the following termination criteria for MOPSO itera-tion:
t kþ1ð Þ ¼wLL kþ1ð Þ
�LðkÞ
LðkÞ
����������þwd
D kþ1ð Þ�DðkÞ
DðkÞ
����������ot0 ð22Þ
where L kþ1ð Þ is the length of the Pareto curve at the (kþ1)thgeneration, and D kþ1ð Þ is the distance from the utopia point toknee point (will be introduced in Section 4.2). wL and wd are twocorresponding weight factors, satisfying wLþwd ¼ 1. If the indi-cator t kþ1ð Þ becomes smaller than the predefined tolerance t0,

Fig. 4. Design variables.
Table 2Variable information.
Design variables Upper bounds (mm) Lower bounds (mm) CoVs
Inner panel (x1) 0.7 1.5 0.03
Hinge reinforcement (x2) 0.7 1.5 0.03
Inner reinforcement (x3) 0.7 1.5 0.03
Outer reinforcement (x4) 0.7 1.5 0.03
Side impact beam (x5) 0.7 1.5 0.03
Outer panel (x6) 0.7 1.5 0.03
Table 3Settings of MOPSO.
MOPSO parameter name Value
Population size 100
External archive size 100
Inertial weight 0.73
Personal learning coefficient 1.50
Global learning coefficient 1.50
Table 4Accuracy assessment for different polynomial response surfaces.
Responses Order R2 RAAE RMAE
Natural frequency Linear 0.9886 0.0893 0.2594
Quadratic 0.9995 0.0163 0.0460Cubic 0.9995 0.0154 0.0536
Quartic 0.9991 0.0238 0.0633
Vertical sag Linear 0.8746 0.2468 1.4272
Quadratic 0.9821 0.0967 0.4976
Cubic 0.9774 0.1209 0.4197Quartic 0.9596 0.1610 0.4670
Upper lateral Linear 0.9459 0.1868 0.7627
Quadratic 0.9962 0.0475 0.2183
Cubic 0.9990 0.0239 0.0998
Quartic 0.9993 0.0236 0.0565Lower lateral Linear 0.9663 0.1491 0.5527
Quadratic 0.9980 0.0362 0.1326
Cubic 0.9995 0.0176 0.0473Quartic 0.9995 0.0197 0.0484
PSF Linear 0.9981 0.0368 0.1032
Quadratic 0.9985 0.0317 0.0821Cubic 0.9981 0.0353 0.1063
Quartic 0.9981 0.0368 0.1032
J. Fang et al. / Finite Elements in Analysis and Design 67 (2013) 13–2118
then the optimization is considered convergent adequately.Herein, we set the parameters as wL ¼wd ¼ 0:5 and t0 ¼ 0:01.
4. Results and discussions
4.1. Response surfaces for approximating door stiffness and PSF
Since the mass of the door follows a linear relationship to thepanel thicknesses, the first-order polynomial response surface isadopted to model the mass. For the stiffness indices, polynomialresponse surface models will be used by comparing the modelingaccuracy.
Regarding the size of sample points, Kaufman et al. [48] found1.5 times of the number of the model coefficients, which meansminimum 42 sample points herein, are needed to generatereasonably accurate quadratic polynomial surface models forthe problems with 5–10 design variables. In this study, a totalof 50 sample points are generated using the OLHS technique toconstruct ARS. Additional 10 confirmation points are generated toassess the accuracy of the surrogate models constructed. Theassessments of the accuracy are summarized in Table 4. It showsthat no single response surface model is suitable for all of thestiffness indices. The quadratic RS models are considered mostsuitable for the first natural frequency and vertical sag stiffness,whilst the cubic and quartic RS models are chosen for lower andupper lateral stiffnesses, respectively.
Using the MCS integrated with descriptive sampling technique,the value of PSF at each DoE sampling point can be attained. In thispaper, the descriptive sampling sizes of 1000, 5000 and 10000 areattempted, respectively. After comparing the trend of PSF valueswith these three descriptive sampling sizes, the 10,000 samples are
regarded convergent properly for calculating PSF. Following the PSFsampling, DRS is established and its accuracy is assessed as inTable 4. Apparently, the quadratic response surface model behavesbest and thus it is chosen to the subsequent optimization.
4.2. Results of deterministic MOO
Fig. 5 depicts the Pareto frontier of the deterministic MOO. ThePareto frontier provides decision-makers with a set of solutionsover the Pareto space for design selection. We can also adopt theminimum distance selection method (MDSM) [17] to choose aspecial optimum, namely knee point [7], as illustrated in Fig. 6. Theknee point in a Pareto front usually signifies a good trade-offbetween the competing objectives, and in most cases it is foundto have the least distance (relative to other Pareto points) from theutopia point. Such a design point generally provides an overalloptimum in the objective space.
Compared with the baseline design, it is noted that the MOOknee point can well improve the design objectives (specifically,decrease the mass and improve vertical sag stiffness), andsimultaneously satisfy all these three deterministic stiffnessconstraints as presented in Table 5. The validation of the optimumis performed using FEA, and there is small difference between theDRS and FEA results as shown in Table 5. Nevertheless, it is notedthat the lower lateral stiffness g2(x) has been pushed to theboundary of the constraint after optimization, which could lead toan unreliable solution if any perturbation of design variablespresents.
In traditional design process, the effect of manufacturing varia-bility on the structural safety cannot be accurately assessed and isoften compensated by using factor of safety. To take into accountsafety factor, we conduct the optimization again by setting the

20 20.5 21 21.5 22 22.5 23 23.5 24 24.5 253.9
4
4.1
4.2
4.3
4.4
4.5
mass / kg
Dsa
g / m
m
MOOMOO with SF
Fig. 5. Pareto optimal frontiers of deterministic MOO.
Fig. 6. Minimum distance selection method (MDSM) for generating knee point.
Table 5Comparison between baseline and MOO optimal designs.
Description Baseline MOO result
DRS FEA Difference (%)
Objectives f1(x) 22.13 kg 20.46 kg 20.46 kg 0.00
f2(x) 4.49 mm 4.28 mm 4.35 mm �1.61
Constraints g1(x) 2.86 mm 2.83 mm 2.79 mm 1.43
g2(x) 1.67 mm 1.67 mm 1.69 mm �1.18
g3(x) 40.45 Hz 42.60 Hz 42.56 mm 0.09
Variables x1 1.0 mm 1.31 mm
x2 1.5 mm 1.40 mm
x3 0.7 mm 0.70 mm
x4 0.8 mm 1.06 mm
x5 1.0 mm 1.09 mm
x6 1.2 mm 0.70 mm
20 20.5 21 21.5 22 22.5 23 23.5 24 24.5 253.9
4
4.1
4.2
4.3
4.4
4.5
4.6
4.7
mass / kg
Dsa
g / m
m
deterministic MOOMORBDO
Fig. 7. Comparison of MORBDO and deterministic MOO results.
J. Fang et al. / Finite Elements in Analysis and Design 67 (2013) 13–21 19
safety factor as s¼1.1, and the corresponding Pareto frontier is alsopresented in Fig. 5. It can be seen that the application of safetyfactor makes the objective performances be sacrificed (i.e., the massis increased and/or vertical sag stiffness is weakened). However,this is not a desired way as it may lead to over-designed structuresgiven that the safety factor is difficult to choose and is oftenassigned conservatively according to the engineering experience.Besides, design by applying safety factor does not allow to imposethe reliability constraint directly, and thus may not be able toensure the reliability of structure. A much more promisingapproach, just as used in this study, is to include probabilisticmodels of the variables into the simulation process.
Note that knockdown factor, which is related to buckling ofstructure, may need to be considered in order to protect uncertain-ties in the design process. However, it is beyond the scope of thispaper and will be addressed in our future work.
4.3. Results of MORBDO
To compare MORBDO with the deterministic MOO, the corre-sponding Pareto frontiers are plotted in Fig. 7 together, wherethe reliability level for MORBDO is set as R¼95%. Similarly to thedeterministic MOO, MORBDO presents a set of solutions over thePareto space. However, as the uncertainties of the design variablesare taken into account, the MORBDO Pareto frontier significantlydiffers from MOO’s. Interestingly, it is noted that of these 100 designpoints generated, the deterministic MOO provides only 45 reliablesolutions, whose PSFs are greater than 1, whilst MORBDO yields 94reliable solutions and the PSFs of the remaining 6 solutions aresmaller than but very close to 1. Therefore, the conclusion can bedrawn that although the objective performances are sacrificed, thereliability of constraints increases significantly through MORBDO.
MOO provides 45 reliable solutions as mentioned above. It isnoted that this number of reliable solutions is near 50% of allsolutions and such a 50–50 value is expected for a deterministicoptimization without considering safety factor. This validates theaccuracy of ARS to a certain extent. For MORBDO, the results have6% of unreliable designs, which implies that there are small errorswhen using DRS to predict the probabilistic constraint. Overall,the RS models used here have satisfactory accuracy for theoptimizations and thus no more sample points are needed toimprove the RS models.
Again from Fig. 7, the Pareto solution can be divided into tworegions: sensitive region when mass o22 kg and insensitive regionwhen mass 422 kg. In the insensitive region, the shapes of the twoPareto frontiers of deterministic MOO and MORBDO almost coin-cide. The majority of the above-mentioned 45 reliable solutions forthe deterministic MOO problem are actually located in thisinsensitive region. In the sensitive region, however, due to con-sideration of uncertainties, the MORBDO Pareto frontier movestoward right within the feasible region, thus its Pareto becomesclearly worse than MOO. In other words, the mass needs to besacrificed in order to accommodate the randomness of designvariables in MORBDO, in which those 55 unreliable MOO solutionsare due to a more sensitive effect of the uncertainties on theobjectives.
Furthermore, it is noted that of these 100 Pareto optimalsolutions to MORBDO, 70 solutions, which are located in thesensitive region, have the lowest reliability in the lower lateral
J. Fang et al. / Finite Elements in Analysis and Design 67 (2013) 13–2120
stiffness and lie on its constraint boundary. The remaining 30solutions, which are located in the insensitive region, have thelowest reliability in the first natural frequency and they are awayfrom the constraint boundary. Accordingly, we can draw someconclusions as follows. First, each constraint tends to play anunequal role in MORBDO, the order of constraint criticality in thisspecific optimization problem is: lower lateral stiffness4naturalfrequency4upper lateral stiffness. Second, there is a definite linkagebetween the sensitivity of the regions and the constraint criticality.Specifically, in the region with a lower mass the constraints arecritical that make this region relatively more sensitive. In contrast, inthe region with a higher mass all of the constraints do not actuallytake effect, the Pareto optimal frontier is dominated by the objec-tives so that this region becomes insensitive.
Note that the above information of sensitive and insensitiveregions can be very useful which will enable the decision-makersto choose a solution from a relatively insensitive region of thePareto frontier whenever possible.
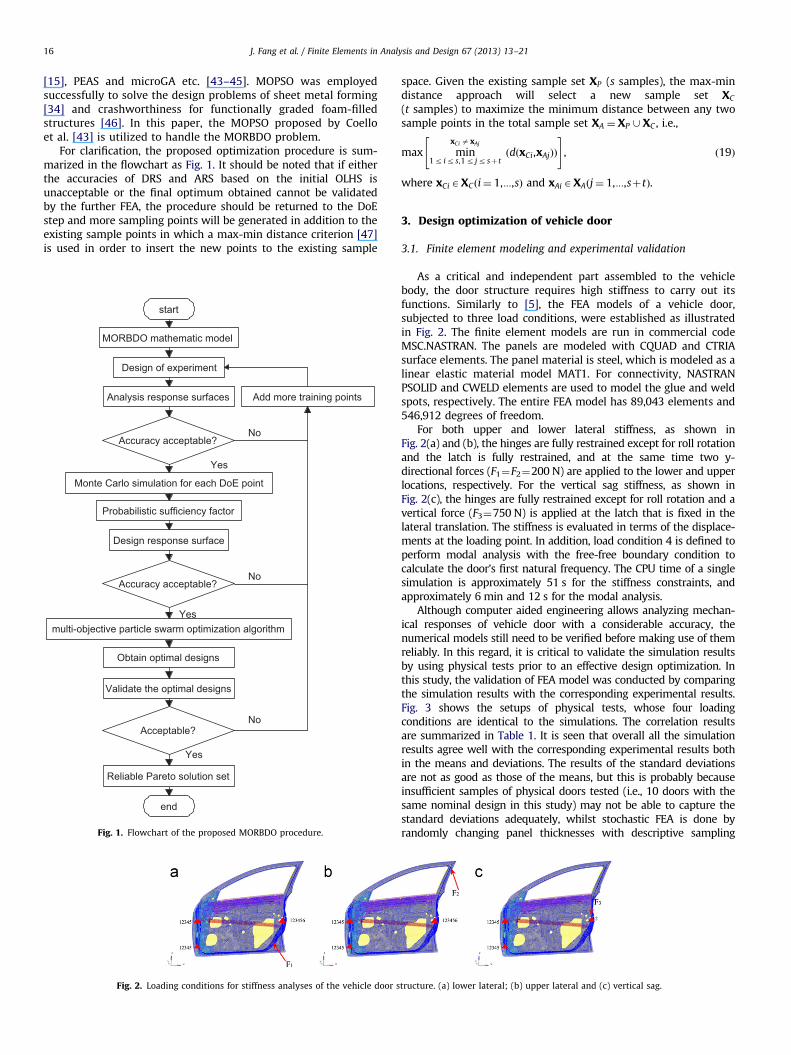
4.4. Effects of reducing the uncertainty and improving the desired
reliability level
Fig. 8 plots the MORBDO Pareto frontiers with two values ofCoVs¼0.01 and 0.03, respectively. As CoVs decrease, the Paretofrontier approaches the deterministic MOO counterpart, whichindicates that less sacrifice is needed to achieve a reliable solution.
20.5 21 21.5 22 22.5 23 23.5 24 24.5 253.9
4
4.1
4.2
4.3
4.4
4.5
4.6
4.7
mass / kg
Dsa
g / m
m
CoVs = 0.01CoVs = 0.03
Fig. 8. Result comparison of different uncertainty.
20.5 21 21.5 22 22.5 23 23.5 24 24.5 253.9
4
4.1
4.2
4.3
4.4
4.5
4.6
4.7
mass / kg
Dsa
g / m
m
R = 0.95R = 0.99
Fig. 9. Comparison of different reliability targets.
In other words, a better vertical sag stiffness performance can beachieved with the same mass if reduce the uncertainty, and viceversa. Nevertheless, as the uncertainty reduces, the manufacturingcost may increase dramatically due to quality control in practicalapplications.
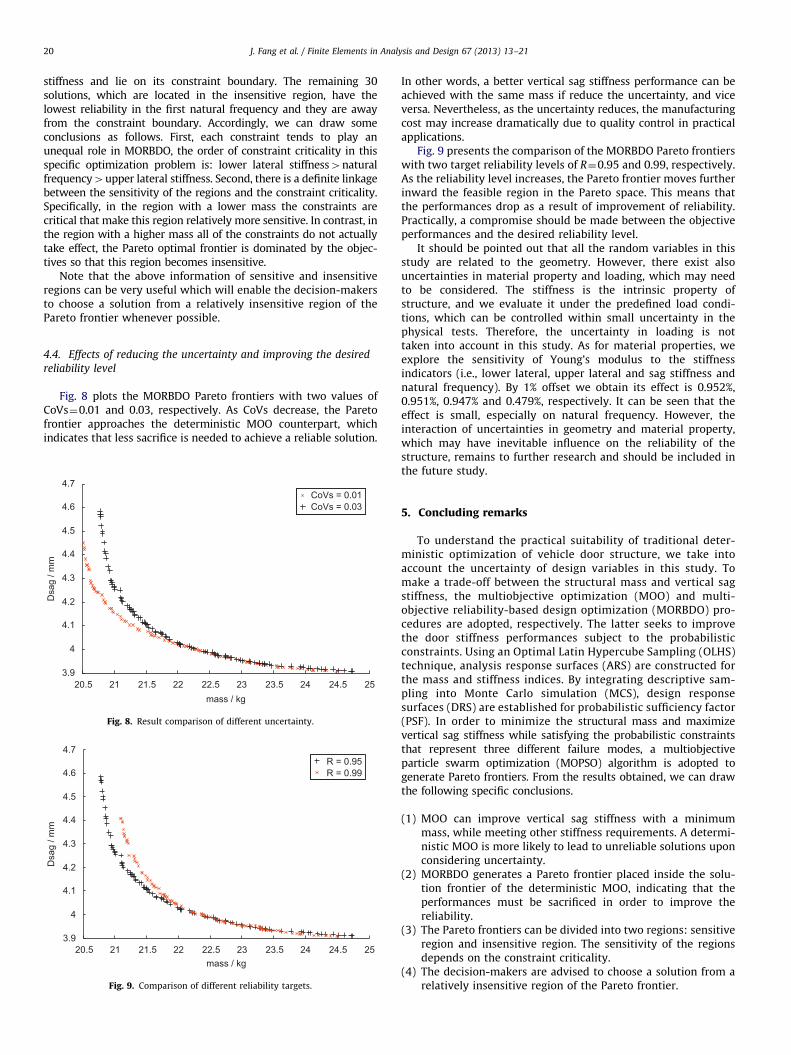
Fig. 9 presents the comparison of the MORBDO Pareto frontierswith two target reliability levels of R¼0.95 and 0.99, respectively.As the reliability level increases, the Pareto frontier moves furtherinward the feasible region in the Pareto space. This means thatthe performances drop as a result of improvement of reliability.Practically, a compromise should be made between the objectiveperformances and the desired reliability level.
It should be pointed out that all the random variables in thisstudy are related to the geometry. However, there exist alsouncertainties in material property and loading, which may needto be considered. The stiffness is the intrinsic property ofstructure, and we evaluate it under the predefined load condi-tions, which can be controlled within small uncertainty in thephysical tests. Therefore, the uncertainty in loading is nottaken into account in this study. As for material properties, weexplore the sensitivity of Young’s modulus to the stiffnessindicators (i.e., lower lateral, upper lateral and sag stiffness andnatural frequency). By 1% offset we obtain its effect is 0.952%,0.951%, 0.947% and 0.479%, respectively. It can be seen that theeffect is small, especially on natural frequency. However, theinteraction of uncertainties in geometry and material property,which may have inevitable influence on the reliability of thestructure, remains to further research and should be included inthe future study.
5. Concluding remarks
To understand the practical suitability of traditional deter-ministic optimization of vehicle door structure, we take intoaccount the uncertainty of design variables in this study. Tomake a trade-off between the structural mass and vertical sagstiffness, the multiobjective optimization (MOO) and multi-objective reliability-based design optimization (MORBDO) pro-cedures are adopted, respectively. The latter seeks to improvethe door stiffness performances subject to the probabilisticconstraints. Using an Optimal Latin Hypercube Sampling (OLHS)technique, analysis response surfaces (ARS) are constructed forthe mass and stiffness indices. By integrating descriptive sam-pling into Monte Carlo simulation (MCS), design responsesurfaces (DRS) are established for probabilistic sufficiency factor(PSF). In order to minimize the structural mass and maximizevertical sag stiffness while satisfying the probabilistic constraintsthat represent three different failure modes, a multiobjectiveparticle swarm optimization (MOPSO) algorithm is adopted togenerate Pareto frontiers. From the results obtained, we can drawthe following specific conclusions.
(1)
MOO can improve vertical sag stiffness with a minimummass, while meeting other stiffness requirements. A determi-nistic MOO is more likely to lead to unreliable solutions uponconsidering uncertainty.(2)
MORBDO generates a Pareto frontier placed inside the solu-tion frontier of the deterministic MOO, indicating that theperformances must be sacrificed in order to improve thereliability.(3)
The Pareto frontiers can be divided into two regions: sensitiveregion and insensitive region. The sensitivity of the regionsdepends on the constraint criticality.(4)
The decision-makers are advised to choose a solution from arelatively insensitive region of the Pareto frontier.
J. Fang et al. / Finite Elements in Analysis and Design 67 (2013) 13–21 21
(5)
In engineering applications, decrease in uncertainty leads toincrease in the target reliability. However, a compromiseshould be made between the manufacturing cost caused byreducing uncertainty and reliability level. Also, a trade-offbetween the performances and the reliability target shouldalso be considered.Acknowledgement
This work is supported by The National 973 Project of China(2010CB328005), The National Natural Science Foundation ofChina (11202072), The Key Program of National Natural ScienceFoundation of China (61232014), The Open Fund of State KeyLaboratory of Materials Processing and Die & Mould Technology(2011-P10), and The Open Fund of Traction Power State KeyLaboratory of Southwest Jiaotong University (TPL1206).
References
[1] J.K. Shin, K.H. Lee, S.I. Song, G.J. Park, Automotive door design with the ULSABconcept using structural optimization, Struct. Multidiscip. Optim. 23 (2002)320–327.
[2] S.I. Song, G.J. Park, Multidisciplinary optimization of an automotive door witha tailored blank, Proc. Inst. Mech. Eng. Part D: J. Automob. Eng. 220 (2006)151–163.
[3] K.H. Lee, D.H. Kang, Structural optimization of an automotive door using thekriging interpolation method, Proc. Inst. Mech. Eng. Part D: J. Automob. Eng.221 (2007) 1525–1534.
[4] P. Zhu, Y.L. Shi, K.Z. Zhang, Z.Q. Lin, Optimum design of an automotive innerdoor panel with a tailor-welded blank structure, Proc. Inst. Mech. Eng. Part D:J. Automob. Eng. 222 (2008) 1337–1348.
[5] X.T. Cui, S.X. Wang, S.J. Hu, A method for optimal design of automotive bodyassembly using multi-material construction, Mater. Des. 29 (2008) 381–387.
[6] G.Y. Sun, G.Y. Li, Z.H. Gong, X.Y. Cui, X.J. Yang, Q. Li, Multiobjective robustoptimization method for drawbead design in sheet metal forming, Mater.Des. 31 (2010) 1917–1929.
[7] G.Y. Sun, G.Y. Li, S.W. Zhou, H.Z. Li, S.J. Hou, Q. Li, Crashworthiness design ofvehicle by using multiobjective robust optimization, Struct. Multidiscip.Optim. 44 (2011) 99–110.
[8] N.D. Lagaros, V. Plevris, M. Papadrakakis, Neurocomputing strategies forsolving reliability-robust design optimization problems, Eng. Comput. 27(2010) 819–840.
[9] Y. Zhang, Q. Liu, Reliability-based design of automobile components, Proc.Inst. Mech. Eng. Part D: J. Automob. Eng. 216 (2002) 455–471.
[10] E. Acar, K. Solanki, System reliability based vehicle design for crashworthi-ness and effects of various uncertainty reduction measures, Struct. Multi-discip. Optim. 39 (2009) 311–325.
[11] C.Y. Song, J. Lee, Reliability-based design optimization of knuckle componentusing conservative method of moving least squares meta-models, Probab.Eng. Mech. 26 (2011) 364–379.
[12] R. d’Ippolito, M. Hack, S. Donders, L. Hermans, N. Tzannetakis, D. Vandepitte,Improving the fatigue life of a vehicle knuckle with a reliability-based designoptimization approach, J. Stat. Plann. Inference 139 (2009) 1619–1632.
[13] B.H. Ju, B.C. Lee, Reliability-based design optimization using a momentmethod and a kriging metamodel, Eng. Optim. 40 (2008) 421–438.
[14] J.R. Cho, J.H. Lee, K.M. Jeong, K.W. Kim, Optimum design of run-flat tire insertrubber by genetic algorithm, Finite Elem. Anal. Des. 52 (2012) 60–70.
[15] X.T. Liao, Q. Li, X.J. Yang, W.G. Zhang, W. Li, Multiobjective optimization forcrash safety design of vehicles using stepwise regression model, Struct.Multidiscip. Optim. 35 (2008) 561–569.
[16] M.L. Bouazizi, S. Ghanmi, N. Bouhaddi, Multi-objective optimization indynamics of the structures with nonlinear behavior: contributions of themetamodels, Finite Elem. Anal. Des. 45 (2009) 612–623.
[17] S. Barakat, K. Bani-Hani, M.Q. Taha, Multi-objective reliability-based optimi-zation of prestressed concrete beams, Struct. Saf. 26 (2004) 311–342.
[18] K. Sinha, Reliability-based multiobjective optimization for automotive crash-worthiness and occupant safety, Struct. Multidiscip. Optim. 33 (2007)255–268.
[19] A. Khakhali, N. Nariman-zadeh, A. Darvizeh, A. Masoumi, B. Notghi, Reliability-based robust multi-objective crashworthiness optimisation of S-shaped box
beams with parametric uncertainties, Int. J. Crashworthiness 15 (2010)443–456.
[20] D.S. Lin, C.M. Ho, K.Y. Chan, beta-pareto set prediction for Bi-objectivereliability-based design optimization, J. Mech. Des. 133 (2011).
[21] M.J. Daskilewicz, B.J. German, T.T. Takahashi, S. Donovan, A. Shajanian, Effectsof disciplinary uncertainty on multi-objective optimization in aircraft con-ceptual design, Struct. Multidiscip. Optim. 44 (2011) 831–846.
[22] Deb K., Padmanabhan D., Cupta S., Mall A.K., Reliability-based multi-objectiveoptimization using evolutionary algorithms, Evolutionary Multi-CriterionOptimization Proceedings, 4403 (2007) 66–80.
[23] E. Saliby, Descriptive sampling: a better approach to Monte Carlo simulation,J. Oper. Res. Soc. 41 (1990) 1133–1142.
[24] K. Ziha, Descriptive sampling in structural safety, Struct. Saf. 17 (1995)33–41.
[25] Y.K. Lee, D.H. Choi, K.J. Cha, Choosing a suitable sample size in descriptivesampling, J. Mech. Sci. Technol. 24 (2010) 1211–1218.
[26] J.E. Hurtado, A.H. Barbat, Monte Carlo techniques in computational stochasticmechanics, Arch. Comput. Meth. Eng. 5 (1998) 3–29.
[27] X. Qu, R.T. Haftka, Reliability-based design optimization using probabilisticsufficiency factor, Struct. Multidiscip. Optim. 27 (2004) 314–325.
[28] S. Venkataraman, Reliability optimization using probabilistic sufficiencyfactor and correction response surface, Eng. Optim. 38 (2006) 671–685.
[29] X.G. Song, J.H. Jung, H.J. Son, J.H. Park, K.H. Lee, Y.C. Park, Metamodel-basedoptimization of a control arm considering strength and durability perfor-mance, Comput. Math. Appl. 60 (2010) 976–980.
[30] R.J. Yang, N. Wang, C.H. Tho, J.P. Bobineau, Metamodeling development forvehicle frontal impact simulation, J. Mech. Des. 127 (2005) 1014–1020.
[31] S.Q. Shan, G.G. Wang, Metamodeling for high dimensional simulation-baseddesign problems, J. Mech. Des. 132 (2010) 051009. (11 pages).
[32] M. Li, G. Li, S. Azarm, A kriging metamodel assisted multi-objective geneticalgorithm for design optimization, J. Mech. Des. 130 (2008) 031401. (10pages).
[33] X.T. Liao, Q. Li, X.J. Yang, W. Li, W.G. Zhang, Two-stage multiobjectiveoptimization of vehicle crashworthiness under frontal impact, Int. J. Crash-worthiness 13 (2008) 279–288.
[34] G.Y. Sun, G.Y. Li, Z.H. Gong, G.Q. He, Q. Li, Radial basis functional model formulti-objective sheet metal forming optimization, Eng. Optim. 43 (2011)1351–1366.
[35] K.H. Lee, W.S. Joo, S.I. Song, I.R. Cha, G.J. Park, Optimization of an automotiveside door beam, considering static requirement, Proc. Inst. Mech. Eng. Part D:J. Automob. Eng. 218 (2004) 51–57.
[36] N. Kaya, I. Karen, F. Ozturk, Re-design of a failed clutch fork using topologyand shape optimisation by the response surface method, Mater. Des. 31(2010) 3008–3014.
[37] Y.J. Xiang, Q. Wang, Z.J. Fan, H.B. Fang, Optimal crashworthiness design of aspot-welded thin-walled hat section, Finite Elem. Anal. Des. 42 (2006)846–855.
[38] S.J. Hou, Q. Li, S.Y. Long, X.J. Yang, W. Li, Design optimization of regularhexagonal thin-walled columns with crashworthiness criteria, Finite Elem.Anal. Des. 43 (2007) 555–565.
[39] Y.C. Liu, Optimum design of straight thin-walled box section beams forcrashworthiness analysis, Finite Elem. Anal. Des. 44 (2008) 139–147.
[40] J. Bi, H.B. Fang, Q.A. Wang, X.C. Ren, Modeling and optimization of foam-filledthin-walled columns for crashworthiness designs, Finite Elem. Anal. Des. 46(2010) 698–709.
[41] R. Jin, W. Chen, T.W. Simpson, Comparative studies of metamodellingtechniques under multiple modelling criteria, Struct. Multidiscip. Optim. 23(2001) 1–13.
[42] Eberhart R., Kennedy J., A new optimizer using particle swarm theory, in:Proceedings of the Sixth International Symposium on Micro Machine andHuman Science, 1995.
[43] C.A.C. Coello, G.T. Pulido, M.S. Lechuga, Handling multiple objectives withparticle swarm optimization, IEEE Trans. Evol. Comput. 8 (2004) 256–279.
[44] Raquel C., Naval P., An effective use of crowding distance in multiobjectiveparticle swarm optimization, in: Proceedings of the 2005 Conference onGenetic and Evolutionary Computation, 2005.
[45] D.S. Liu, K.C. Tan, C.K. Goh, W.K. Ho, A multiobjective memetic algorithmbased on particle swarm optimization, IEEE Trans. Syst. Man and Cybern. B:Cybern. 37 (2007) 42–50.
[46] G.Y. Sun, G.Y. Li, S.J. Hou, S.W. Zhou, W. Li, Q. Li, Crashworthiness design forfunctionally graded foam-filled thin-walled structures, Mater. Sci. Eng.Struct. Mater. Prop. Microstruct. Process. 527 (2010) 1911–1919.
[47] M.E. Johnson, L.M. Moore, D. Ylvisaker, Minimax and maximin distancedesigns, J. Stat. Plann. Inference 26 (1990) 131–148.
[48] M. Kaufman, V. Balabanov, A.A. Giunta, B. Grossman, W.H. Mason, S.L. Burgee,R.T. Haftka, L.T. Watson, Variable-complexity response surface approxima-tions for wing structural weight in HSCT design, Comput. Mech. 18 (1996)112–126.