
Moving attractive virtual agent improves interpersonal coordination stability
15
Moving attractive virtual agent improves interpersonal coordination stability Zhong Zhao a,⇑ , Robin N. Salesse a , Mathieu Gueugnon a , Richard C. Schmidt b , Ludovic Marin a , Benoît G. Bardy a,c a Movement to Health Laboratory, Euromov, University of Montpellier, France b Department of Psychology, College of the Holy Cross, Worcester, MA, USA c Institut Universitaire de France, Paris, France article info PsycINFO classification: 3020 Keywords: Social motor coordination Physical attractiveness Affiliation Likability Group and interpersonal processes abstract Interpersonal motor coordination is influenced not only by biome- chanical factors such as coordination pattern, oscillating frequency, and individual differences, but also by psychosocial factor such as likability and social competences. Based on the social stereotype of ‘‘what is beautiful is good’’, the present study aimed at investigat- ing whether people coordinate differently with physically attrac- tive people compared to less attractive people. 34 participants were engaged in an interpersonal coordination task with different looking (virtual) agents while performing at the same time a reac- tion time task. Results showed that participants had more stable motor coordination with the moving attractive than with the less attractive agent, and that the difference in motor coordination could not be interpreted by a specific attention allocation strategy. Our findings provide the evidence that physical attractiveness gen- uinely affects how people interact with another person, and that the temporal-spatial coordinated movement varies with the part- ner’s psychosocial characteristics. The study broadens the perspec- tive of exploring the effect of additional psychosocial factors on social motor coordination. Ó 2015 Elsevier B.V. All rights reserved. http://dx.doi.org/10.1016/j.humov.2015.03.012 0167-9457/Ó 2015 Elsevier B.V. All rights reserved. ⇑ Corresponding author. E-mail address: [email protected] (Z. Zhao). Human Movement Science 41 (2015) 240–254 Contents lists available at ScienceDirect Human Movement Science journal homepage: www.elsevier.com/locate/humov
-
Upload
independent -
Category
Documents
-
view
4 -
download
0
Transcript of Moving attractive virtual agent improves interpersonal coordination stability

Human Movement Science 41 (2015) 240–254
Contents lists available at ScienceDirect
Human Movement Science
journal homepage: www.elsevier .com/locate/humov
Moving attractive virtual agent improvesinterpersonal coordination stability
http://dx.doi.org/10.1016/j.humov.2015.03.0120167-9457/� 2015 Elsevier B.V. All rights reserved.
⇑ Corresponding author.E-mail address: [email protected] (Z. Zhao).
Zhong Zhao a,⇑, Robin N. Salesse a, Mathieu Gueugnon a, Richard C. Schmidt b,Ludovic Marin a, Benoît G. Bardy a,c
a Movement to Health Laboratory, Euromov, University of Montpellier, Franceb Department of Psychology, College of the Holy Cross, Worcester, MA, USAc Institut Universitaire de France, Paris, France
a r t i c l e i n f o
PsycINFO classification:
3020Keywords:Social motor coordinationPhysical attractivenessAffiliationLikabilityGroup and interpersonal processes
a b s t r a c t
Interpersonal motor coordination is influenced not only by biome-chanical factors such as coordination pattern, oscillating frequency,and individual differences, but also by psychosocial factor such aslikability and social competences. Based on the social stereotype of‘‘what is beautiful is good’’, the present study aimed at investigat-ing whether people coordinate differently with physically attrac-tive people compared to less attractive people. 34 participantswere engaged in an interpersonal coordination task with differentlooking (virtual) agents while performing at the same time a reac-tion time task. Results showed that participants had more stablemotor coordination with the moving attractive than with the lessattractive agent, and that the difference in motor coordinationcould not be interpreted by a specific attention allocation strategy.Our findings provide the evidence that physical attractiveness gen-uinely affects how people interact with another person, and thatthe temporal-spatial coordinated movement varies with the part-ner’s psychosocial characteristics. The study broadens the perspec-tive of exploring the effect of additional psychosocial factors onsocial motor coordination.
� 2015 Elsevier B.V. All rights reserved.

Z. Zhao et al. / Human Movement Science 41 (2015) 240–254 241
1. Introduction
Motor coordination plays a fundamental role in our daily life. It enables individuals to efficientlysynchronize with external environmental events as well as with other people during social interac-tion. Phenomena of motor coordination encompass for instances hand-clapping (Neda, Ravasz,Brechet, Vicsek, & Barabasi, 2000), two people walking together (van Ulzen, Lamoth, Daffertshofer,Semin, & Beek, 2008), and team sports such as basketball (Esteves et al., 2012).
In social context, our behavior is well coordinated temporally and spatially with the person(s) weare interacting with. Because of the cooperative nature of human relationship, two agents can beviewed as a single dyadic synergy (Schmidt, Carello, & Turvey, 1990). More than three decades’research on interpersonal motor coordination has investigated the movement dynamics between peo-ple by adopting the model of the dynamical entrainment of two coupled oscillators. Relative phase,which captures the angular difference between two oscillators as a function of time (Haken, Kelso,& Bunz, 1985; Kelso, Scholz, & Schöner, 1986), summarizes the temporal spatial difference betweenthe interactants’ movement. The standard deviation (SD) of relative phase depicts the variability ofrelative phases around their mean during the interaction process (Haken et al., 1985; Richardson,Marsh, Isenhower, Goodman, & Schmidt, 2007). Lower SD of relative phase indicates higher stabilityof the coordination, and higher SD describes lower stability.
The majority of the studies conducted in the context of the dynamical approach to interpersonalmotor coordination have focused on the biomechanical and neuromuscular factors shaping patternformation. As in the bimanual coordination context, two natural patterns of interpersonal coordina-tion co-exist: in-phase (relative phase = 0�) and anti-phase (relative phase = 180�). In-phase coordina-tion is more stable than anti-phase, and a (between-people) phase transition occurs from anti-phaseto in-phase when the oscillating frequency is elevated to a threshold value (Schmidt, Bienvenu,Fitzpatrick, & Amazeen, 1998a; Schmidt et al., 1990). Moreover, when two interacting people sharethe same preferred frequency, coordination is the most stable, as large difference between two inter-actants’ preferred frequencies is more likely to lead to breakdowns in motor coordination (Richardsonet al., 2007; Schmidt, Bienvenu, Fitzpatrick, & Amazeen, 1998b).
As mentioned above, interpersonal motor coordination is influenced by biomechanical factors suchas the type of coordination pattern (in-phase or anti-phase) (Schmidt et al., 1990), the oscillating fre-quency (Schmidt et al., 1990), and individual differences (Richardson et al., 2007; Schmidt et al.,1998b). Psychosocial factors, which are elements seemingly unrelated to biomechanical properties– such as social competence (Schmidt, Christianson, Carello, & Baron, 1994) and social motives(Lumsden, Miles, Richardson, Smith, & Macrae, 2012) – were reported to influence the performanceof interpersonal coordination. Schmidt et al. (1994) explored whether social competence exertedany impact on visual interpersonal coordination of rhythmic limb movements. Participants werepaired to form three types of combination of social competence: high-high (HH), high-low (HL), andlow-low (LL). Results demonstrated that the HL combination produced fewer breakdowns in phaselocking than the HH and LL pairs did (Schmidt et al., 1994). Lumsden et al. (2012) explored whetherthe degree of spontaneous synchronization with others can be modulated by social motives. Peoplewith a pro-social orientation showed a higher orientation to synchronize with others compared tothe pro-self individuals (Lumsden et al., 2012). These two studies provide evidences that humanbeings’ temporal-spatial coordinated behavior is influenced by psychosocial factors, and that theway we interact with others reflects some of our psychological features.
Interestingly, the relationship between interactants has been broadly reported to affect and to beaffected by interpersonal coordination. For instance, higher perceived movement synchrony wasfound to be associated with higher rapport between teacher and student (Bernieri, 1988). Miles,Nind, and Macrae (2009) demonstrated that the way individuals coordinate with each other reflectstheir mental connectedness. In their study, participants evaluated the rapport level of two walkerseither by looking at a video of two animated walking images or by listening to auditory recordingsof walking steps. Results showed that the highest third-party judgment of rapport was obtained whenperceiving the most stable forms of interpersonal coordination (i.e., in-phase or anti-phase coordina-tion) (Miles et al., 2009). In another experiment, the same group of researchers indicated that rapport

242 Z. Zhao et al. / Human Movement Science 41 (2015) 240–254
resulted in higher level of motor coordination. Participants performed a stepping task in the presenceof either a late-coming or a punctual confederate. Results showed that the late-coming confederateinduced less rapport and lower degree of coordination compared to the on-time confederate.Moreover, a positive correlation between rapport and the level of coordination was found (Miles,Griffiths, Richardson, & Macrae, 2010). On the other hand, Hove et al. (2009) claimed that interper-sonal coordination promotes likability. In their study, participants performed a finger-tapping taskwhile sitting aside to a confederate who was either tapping synchronously or asynchronously withthem, or stayed silent. Their results exhibited a higher level of likability in the synchronous conditionthan in the other two situations (Hove & Risen, 2009). Together, these studies suggest that coordinatedbehavior and interpersonal relationship are highly integrated. The way people coordinate with eachother conveys information about the likability between interactants and influences it. At the sametime, the likability between interacting partners may exert an impact on temporal-spatial coordinatedmovements during interpersonal interaction.
The focus of our study was to explore whether the coordinated behavior differs with the partner’sphysical appearance, more specifically with physical attractiveness. The idea emerged from theGibsonian notion of social perception, suggesting that individuals use others’ physical appearanceto guide their behavior (Zebrowitz & Collins, 1997). Human appearance during social interactioncan be viewed as a social affordance because what a person ‘‘invites, promises, threatens, or doescan be found in (the information contained in) light’’ (Gibson, 1979). Furthermore, previous researchhas indeed found evidences for the phenomenon that individuals perceive and behave differently withattractive faces compared to less attractive faces. However, no consensus has been reached concerningwhether physical attractiveness brings more positive or more negative effects. For example, somestudies showed that men sought less help from attractive than unattractive women (Nadler,Shapira, & Ben-Itzhak, 1982). Physically attractive individuals were negatively evaluated by thesame-gender counterparts in romantic contexts (Maner, Miller, Rouby, & Gailliot, 2009). On the con-trary, in most cases, physical attractiveness exhibits advantages. Physically attractive faces werereported to win more help (Benson, Karabenick, & Lerner, 1976), higher likability (Byrne, London, &Reeves, 1968), and higher appraisal (Landy & Sigall, 1974) from perceivers compared to less attractiveones. In social psychology, the famous social stereotype of ‘‘what is beautiful is good’’ indicates thatattractive appearance alone is powerful enough to evoke positive overgeneralizing effect. People tendto perceive physically attractive people as happier, outgoing, successful, kinder, and more intelligent,and have more favorable personal traits (Dion, Walster, & Berschei, 1972).
To sum up, individuals coordinate their movements during social interaction. As social agents, ourbetween-person motor coordination is not only affected by biomechanical factors, but also by psy-chosocial characteristics of the people with whom we interact. Physical attractiveness, which canbe considered as a social affordance, has been widely studied to influence the judgments and behaviorof other people. However, no study so far has been conducted to explore whether physical attractive-ness genuinely evokes different coordinated behavior during social interaction. Specifically our studyaimed at investigating whether people adjust their motor behavior as a function of the social attrac-tiveness of their interacting partner.
As more attention is often paid to physically attractive people (Lorenzo, Biesanz, & Human, 2010)and higher level of attention has been reported to increase interpersonal coordination performance(Richardson et al., 2007; Schmidt & O’Brien, 1997), we added a reaction time (RT) task to investigatewhether the difference in coordination stability could be explained by the attention allocation strat-egy. A red dot on the face of the agent was displayed for the RT task, and it also assured that partici-pants noticed the physical attractiveness of the agent.
Two questions were addressed: (1) whether motor coordination stability was different with attrac-tive compared to less attractive agent; (2) whether the difference in motor coordination was due toattention allocation. We hypothesized that coordination would be more stable during coordinationwith the attractive agent, and that participants would pay more attention to coordinate with theattractive agent, thus leaving less attention to the RT task.
An attractive and a less attractive agent were used as coordination partners. Human-agent interac-tion instead of real human-human interaction was adopted to eliminate the possible interpretationthat higher stability of motor coordination with the attractive agent was due to the similarity in
Z. Zhao et al. / Human Movement Science 41 (2015) 240–254 243
preferred frequency (Schmidt et al., 1998b). Therefore in order to make sure that physical attractive-ness was the only manipulated factor, artificial agents (in the present study they were pictures andvideos) provided us with the possibility to assign exactly the same movement to agents with differentphysical attractiveness.
In the present study, both pictures and videos were employed to seek whether the agent’s movingstatus was critical in facilitating motor coordination based on the following two reasons. First, thefindings of the mirror neuron system (Rizzolatti et al., 1996) suggest a strong neurological basis forinterpersonal motor coordination. It illustrates the human nature of synchronizing with others whenthe perception of other’s behavior becomes available. Furthermore, studies using neuroimaging tech-nology to compare the effect of static versus dynamic event showed that videos evoked higher activityin the related brain areas (Kessler et al., 2011; LaBar, Crupain, Voyvodic, & McCarthy, 2003), indicatingthat perceiving movement stimulates the brain to a higher extent. Due to the close perception-actionconnection in the mirror neuron system, higher stimulation of the neural structures by perceivingmovement is more likely to evoke execution of the perceived action. Therefore we hypothesized thatvideos might induce higher level of coordinated movements than pictures. Second, moving character-istic is a strong social affordance, which invites participants to coordinate more with the movementsof their interactants. In the study of Aguiar and Taylor (2014) investigating children’s concepts ofsocial affordance of a stuffed dog (static) compared to a virtual dog (moving), results showed that avirtual dog was rated higher in terms of inviting children to interact with them than the static dog(Aguiar & Taylor, 2014). It has been suggested that the moving characteristic provides a ‘‘live’’ experi-ence, which affords more interactive behavior.
2. Methods
2.1. Participants
18 women and 16 men ranging in age from 15 to 31 (M = 22 years) were recruited into the experi-ment. Two participants were left-handed. Each participant signed the informed consent prior to thestart of the experiment, and they were not told the real purpose of the experiment until it was fin-ished. The study conforms to the principles expressed in the Declaration of Helsinki.
2.2. Materials
2.2.1. Displayed stimuliIn our experiment, seven displayed stimuli consisting of three videos and four pictures were adopted
to show moving and static agents respectively. As for video clips, a video in which a man (Actor 1) wastalking with his head moving was used. Another video was created by asking another actor (Actor 2) tomove and speak in the same way as Actor 1 did during the same amount of time. The amount of move-ment for each video has been controlled using a Motion Energy Analysis (Ramseyer & Tschacher, 2011).Such a procedure revealed no significant difference between these videos, indicating that they werekinematically equivalent. In order to further ensure that the agent’s movement in the video was notthe main contributor to influencing motor coordination, a third video was added, consisting of a pointlight display created by putting 6 dots on the face of Actor 2 while he was mimicking Actor 1. The agentsin the videos displayed a neutral facial expression and each video lasted 15 s.
Pictures of these three agents with neutral facial expressions were also used. Besides, a picture of agray square was used as the control condition. Pictures and videos were shown in a black-and-whiteform, and videos were presented at 60 Hz without playing auditory information. Depictions of the fourstimulus conditions are shown in Fig. 1a. During the experiment, videos or pictures were displayed onthe middle upper part of the screen, which was covered by a black background (Fig. 1b). Length andwidth of videos and pictures were two thirds of those of the screen.
2.2.2. Classification of agents’ physical attractiveness12 naïve individuals who did not participate in the experiment were presented pictures of the two
agents (Actor 1 and Actor 2) to rate their physical attractiveness respectively on a 7-point likert scale.

Fig. 1a. Physical appearances of the four agents. They are the less attractive agent, attractive agent, point light display and thegray square (also a control condition) from left to right.
Fig. 1b. Experimental setup illustrating motor coordination and RT tasks.
244 Z. Zhao et al. / Human Movement Science 41 (2015) 240–254
Wilcoxon signed rank test showed a significantly higher value of attractiveness for Actor 2 over Actor1 (p < .01). Based on this result, Actor 2 was classified as the ‘‘attractive agent’’ and Actor 1 as the ‘‘lessattractive agent’’.
2.3. Apparatus
A Wacom tablet (Cintiq 21) connected to a computer was used to show videos or pictures to theparticipants. It also served as a tactile tool on which participants played the coordination game withthe displayed agents. The program of the whole experiment was written in Matlab, using thePsychophysics Toolbox extensions (Brainard, 1997; Kleiner, Brainard, & Pelli, 2007; Pelli, 1997).Data concerning agent’s movement, participant’s movement and reaction time were all stored intothe computer automatically.
2.4. Tasks
The participants performed a dual task game involving both a RT and a motor coordination task(Fig. 1b). For the RT task, they had to press a key as fast as possible when a red dot appeared at randomintervals (1–3 s) on the agents’ forehead. For the motor coordination task, two oscillating dots werepresented underneath the displayed stimuli. Participants were told that the movement of the yellowdot corresponded to the prerecorded movement of the displayed agent. In reality, the yellow dot fol-lowed a Matlab-generated horizontal sinusoidal movement at either 100% or 150% of the preferredfrequency of the participants’ movements. The movement of the agents in the video was not in coin-cidence with the oscillation of the yellow dot. The specific manipulation was based on the finding thatbelief influences individual’s movement. In Stanley, Gowen, and Miall’s (2007) study, participantswere told to perform congruent or incongruent movements with a biological or non-biological baseddot movement. Results showed that their movement was interfered in incongruent task only whenthey were told that the dot was biologically based, supporting the idea that belief influences how peo-ple move (Stanley et al., 2007). The coordination task required participants to coordinate the blue dotwith the yellow one by using the dominant hand with a pen of the Wacom tablet. Participants were

Z. Zhao et al. / Human Movement Science 41 (2015) 240–254 245
instructed to perform either in-phase or anti-phase movements with the yellow dot according to theinstruction displayed on the screen prior to each trial.
2.5. Experimental design
The experiment was built on a 2 � 2 � 7 repeated-measure design with pattern (in-phase and anti-phase), velocity (100% and 150% of participants’ preferred frequency) and display (7 displays men-tioned above) as independent factors. It consisted of 28 conditions, presented randomly three times.Consequently, the experiment had 84 trials in total and lasted 90 min on average for each participant.
2.6. Experimental procedure
2.6.1. FamiliarizationSix non-recorded trials helped participants to become familiarized with RT and motor coordination
tasks. Each trial lasted 15 s and participants had the chance to redo it if the instructions were not fol-lowed correctly. The displayed motion corresponded to a 1 Hz sine oscillation.
2.6.2. Preferred frequency detectionPrior to the start of the dual-task game, one trial was run in a solo condition in order to detect the
preferred frequency of each participant. The instruction was to perform smooth horizontal oscillatingmovements at the most comfortable tempo (as if they could move all day long). The trial lasted 30 sand the preferred frequency was then implemented to create the ‘‘prerecorded-movements-of-the-agent’’ velocity, which later corresponded to the movement of the yellow dot.
2.6.3. Dual-task instructionsFor the main experimental task, participants were instructed to perform the oscillation and the RT
task with no attentional priority. The instruction was to ‘‘press the keyboard as fast as possible whilemaintaining the highest level of coordination with the oscillating stimulus’’. Each trial lasted 15 s.
2.6.4. Post experiment evaluation of agent likabilityEach participant answered the question ‘‘How much did you enjoy playing with the agent’’ on a
7-point likert scale to assess the likability for each of the four agents.
2.6.5. Evaluation of agent likability without interactionIt is necessary to evaluate likability without interaction because a large body of literature has
shown that motor coordination facilitates positive feelings between partners. For instance, motorcoordination is known to increase the immediate perception of affiliation (Hove & Risen, 2009) andto contribute to blurring self-other boundaries (Paladino, Mazzurega, Pavani, & Schubert, 2010).Therefore likability, when measured after interaction, could have been biased. In order to evaluatethe likability of the two agents without interaction, 10 additional naïve participants who did not par-ticipate the dual-task experiment rated the pictures of the two agents with the aid of a questionnairemeasuring social attraction (McCroskey & McCain, 1974).
2.7. Data analysis
2.7.1. RTRT was calculated as the time interval between the onset of the RT signal and the time when the
participant pressed the keyboard to answer it. Seven or eight RT signals were presented randomly ineach trial during the 15-s motor coordination task. The first RT in each trial was eliminated because itusually occurred when the participant was just becoming acclimated to the motor coordination task.RTs either lower than 0.1 s or higher than 1 s were also discarded from further analysis. By the virtueof these criteria 8.2% of the total number of RTs across all participants were out of the range.Afterwards, a log transformation [log2 (RT + 1)] was applied to RTs in order to reduce the skewness
246 Z. Zhao et al. / Human Movement Science 41 (2015) 240–254
of RT (Ratcliff, 1993), since RT’s raw distribution was skewed to the right. Finally, the mean of the RTlog transformation was calculated for each trial for further statistical analysis.
2.7.2. SD of relative phaseMovement time series were filtered with a second order Butterworth filter, run twice to negate the
phase shift, with a cutoff frequency of 10 Hz. Continuous relative phase w(t) was calculated asw(t) = w1(t) � w2(t). w1(t) and w2(t) corresponded to the continuous phase angles of the two oscilla-tors, calculated as arctan(s(t)/Hs(t)), with s(t) and Hs(t) representing respectively the real and imagi-nary parts of the Hilbert transformation of the analytic signal (Pikovsky, Rosenblum, & Kurths, 2001).For each trial, the first 2 s were cut due to a transient process, and the last second was cut because ofabnormal values after Hilbert transformation.
2.7.3. ‘‘Poorly performed’’ trialsTrials showing relative phase variability larger than 50�, or exhibiting all RT answers outside the
range [0.1–1 s] were considered as ‘‘poorly performed’’ trials, and they were deleted from furtheranalysis. This filtering criterion based on both RT and relative phase variability ruled out 5.3% of thetrials across all participants. A Friedman test revealed no significant difference in these eliminated tri-als across the ‘‘display’’ conditions (p > .05). The Wilcoxon signed-rank test, however, showed thatthese trials were more frequently located in anti-phase compared to in-phase (p < .05), and in 150%compared to 100% of the preferred frequency (p < .05). This result indicates that the most stable pat-tern occurred for in-phase and at preferred frequency, confirming existing data (i.e., Schmidt et al.,1990).
Values of SD of relative phase and RT collected in each condition for each participant were aver-aged. Repeated-measure ANOVAs and Fisher LSD post hoc tests were carried out to investigate theeffect of the three factors on both the stability of motor coordination and RT.
3. Results
3.1. Stability of motor coordination
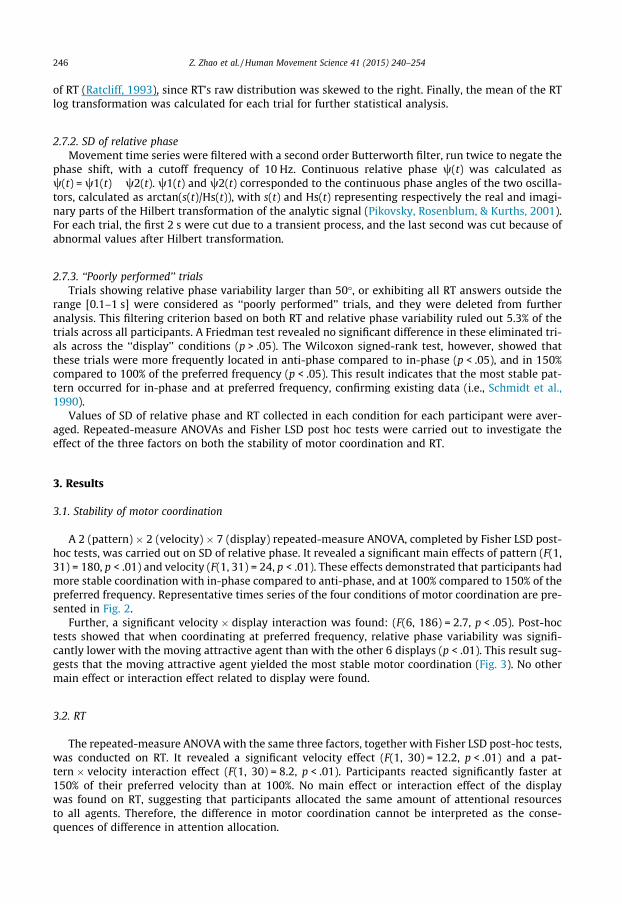
A 2 (pattern) � 2 (velocity) � 7 (display) repeated-measure ANOVA, completed by Fisher LSD post-hoc tests, was carried out on SD of relative phase. It revealed a significant main effects of pattern (F(1,31) = 180, p < .01) and velocity (F(1, 31) = 24, p < .01). These effects demonstrated that participants hadmore stable coordination with in-phase compared to anti-phase, and at 100% compared to 150% of thepreferred frequency. Representative times series of the four conditions of motor coordination are pre-sented in Fig. 2.
Further, a significant velocity � display interaction was found: (F(6, 186) = 2.7, p < .05). Post-hoctests showed that when coordinating at preferred frequency, relative phase variability was signifi-cantly lower with the moving attractive agent than with the other 6 displays (p < .01). This result sug-gests that the moving attractive agent yielded the most stable motor coordination (Fig. 3). No othermain effect or interaction effect related to display were found.
3.2. RT
The repeated-measure ANOVA with the same three factors, together with Fisher LSD post-hoc tests,was conducted on RT. It revealed a significant velocity effect (F(1, 30) = 12.2, p < .01) and a pat-tern � velocity interaction effect (F(1, 30) = 8.2, p < .01). Participants reacted significantly faster at150% of their preferred velocity than at 100%. No main effect or interaction effect of the displaywas found on RT, suggesting that participants allocated the same amount of attentional resourcesto all agents. Therefore, the difference in motor coordination cannot be interpreted as the conse-quences of difference in attention allocation.

Posi
tion
Time (1/60 s)
APo
sitio
n
B
Posi
tion
C
Posi
tion
D
Time (1/60 s)
Time (1/60 s)
Time (1/60 s)
Fig. 2. Representative time series of the motor coordination. The black line represents the movement of the agent and the redone the participant. Four conditions were displayed: A in-phase at 100% preferred frequency; B in-phase at 150% preferredfrequency; C anti-phase at 100% preferred frequency; D anti-phase at 150% preferred frequency. (For interpretation of thereferences to color in this figure legend, the reader is referred to the web version of this article.)
Z. Zhao et al. / Human Movement Science 41 (2015) 240–254 247
3.3. Correlation between RT and stability of coordination
In order to better understand the participants’ strategy in performing the dual-task game, we cal-culated the correlation between each valid RT response (RTs located within the range of 0.1 s and 1 s)and the SD of relative phase happening from the time when the RT signal occurred to the time whenthe RT response was answered. Pearson correlation showed a positive correlation between RT and SDof relative phase (r = .113, n = 16741, p < .001), suggesting an attentional split between these twotasks. Linear regression indicated that SD of relative phase significantly predicted RT (p < .001):RT = 0.004 * SD of relative phase + 0.454, R2 = .013. However, the low value of the slope (0.004) sug-gested that even though there was a positive correlation between RT and SD of relative phase, thechanges in SD of relative phase were not able to make a considerable change in RT. Therefore wecan consider that the attentional split phenomenon was not evident while performing the dual-taskgame.
10
11
12
13
14
15
16
17
18
19
20
SDof
rela
tive
phas
e(D
eg.)
Control condition Less attractive agent Attractive agent Point light display
Static Moving Static Moving Static Moving
**
Fig. 3. Comparison of variability of motor coordination between different displays at preferred frequency. Error bars representstandard errors. ⁄p < .05. ⁄⁄p < .01.
248 Z. Zhao et al. / Human Movement Science 41 (2015) 240–254
3.4. Bimanual coupling
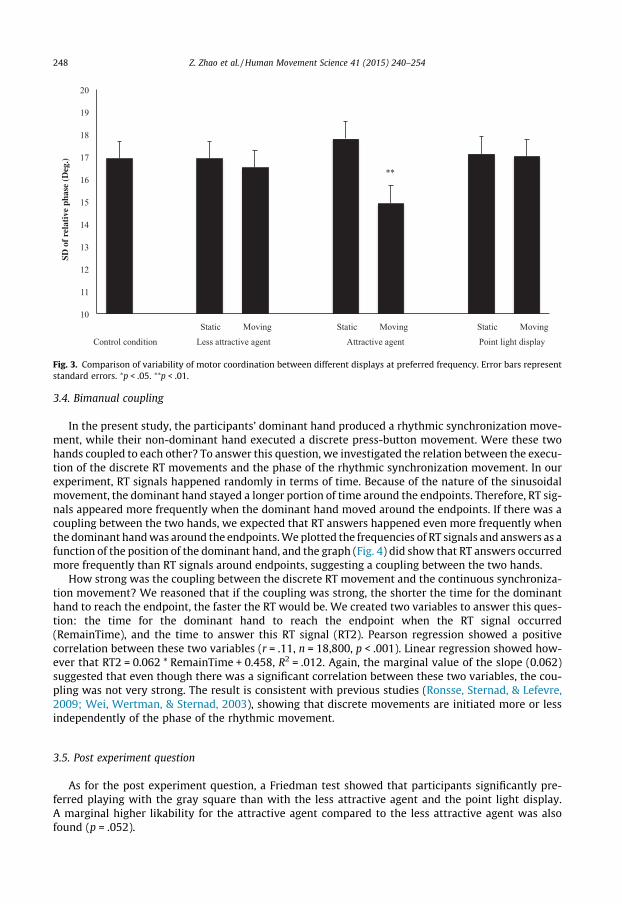
In the present study, the participants’ dominant hand produced a rhythmic synchronization move-ment, while their non-dominant hand executed a discrete press-button movement. Were these twohands coupled to each other? To answer this question, we investigated the relation between the execu-tion of the discrete RT movements and the phase of the rhythmic synchronization movement. In ourexperiment, RT signals happened randomly in terms of time. Because of the nature of the sinusoidalmovement, the dominant hand stayed a longer portion of time around the endpoints. Therefore, RT sig-nals appeared more frequently when the dominant hand moved around the endpoints. If there was acoupling between the two hands, we expected that RT answers happened even more frequently whenthe dominant hand was around the endpoints. We plotted the frequencies of RT signals and answers as afunction of the position of the dominant hand, and the graph (Fig. 4) did show that RT answers occurredmore frequently than RT signals around endpoints, suggesting a coupling between the two hands.
How strong was the coupling between the discrete RT movement and the continuous synchroniza-tion movement? We reasoned that if the coupling was strong, the shorter the time for the dominanthand to reach the endpoint, the faster the RT would be. We created two variables to answer this ques-tion: the time for the dominant hand to reach the endpoint when the RT signal occurred(RemainTime), and the time to answer this RT signal (RT2). Pearson regression showed a positivecorrelation between these two variables (r = .11, n = 18,800, p < .001). Linear regression showed how-ever that RT2 = 0.062 * RemainTime + 0.458, R2 = .012. Again, the marginal value of the slope (0.062)suggested that even though there was a significant correlation between these two variables, the cou-pling was not very strong. The result is consistent with previous studies (Ronsse, Sternad, & Lefevre,2009; Wei, Wertman, & Sternad, 2003), showing that discrete movements are initiated more or lessindependently of the phase of the rhythmic movement.
3.5. Post experiment question
As for the post experiment question, a Friedman test showed that participants significantly pre-ferred playing with the gray square than with the less attractive agent and the point light display.A marginal higher likability for the attractive agent compared to the less attractive agent was alsofound (p = .052).

0
500
1000
1500
2000
2500
3000
3500
4000
4500
Freq
uenc
y
RT response
RT signal
Left endpoint Right endpointPosition of the dominant hand
Fig. 4. Frequencies of RT signals and RT responses as a function of the position of the dominant hand.
Z. Zhao et al. / Human Movement Science 41 (2015) 240–254 249
3.6. Agent likability without interaction
Wilcoxon signed rank test confirmed that Actor 2 was judged with higher likability than Actor 1(p < .01) without interaction.
4. Discussion
This study investigated whether interpersonal coordination is affected by the physical attractive-ness of an interacting partner. The results confirmed previous findings that in-phase rhythmiccoordination is more stable than anti-phase (Schmidt et al., 1990, 1998a), and that rhythmic coordina-tion at a preferred frequency is more stable than at a faster frequency (Schmidt et al., 1994). Moreremarkably, we showed that participants had significantly higher coordination stability when inter-acting with the moving attractive agent than with the other static or dynamic agents, and that thecoordination stability difference could not be interpreted by an attention allocation strategy.
4.1. Human vs. non-human interaction: activation of social affordance
In our experiment, participants produced a more stable coordination with the moving attractiveagent compared to the non-human agent (the gray square), suggesting that they adopted a differentmotor pattern when interacting with a human agent. This result is consistent with recent findingsobtained during pick-and-place tasks, indicating that a social affordance was activated when theyinteract with a human being compared to a non-human agent (Becchio, Sartori, Bulgheroni, &Castiello, 2008; Ferri, Campione, Volta, Gianelli, & Gentilucci, 2011). Participants in Becchio et al.’sstudy computed a more appropriate kinematic approach when both picking and placing an object ontoa human hand, inferring a more ‘‘careful’’ strategy when interacting with a human being. Our study, onthe contrary, did not support the idea of carefulness since carefulness normally requires more atten-tion and our results did not reveal a significant difference in attention allocation between humanagents and the gray square.
Our result suggested that the activation of social affordance with the moving attractive agent in ourexperiment led to a more stable coordination compared to the gray square. If the moving humanfigure had been the only reason for a more stable coordination with the moving attractive agent,we should have found a more stable coordination with the moving less attractive agent compared
250 Z. Zhao et al. / Human Movement Science 41 (2015) 240–254
to the gray square. But we did not find the same result between moving attractive agent and the graysquare. A reasonable explanation is the counteracting influence between the facilitating effects of syn-chronizing one’s movement with a moving human being, with the interfering effect of synchronizingone’s movement with a less attractive face. The result also indicates that physical attractivenessaffects the stability of motor coordination, with less attractiveness reducing coordination stability.
4.2. Longer RT at 100% than at 150% of the preferred frequency
Participants reacted significantly faster at 150% than at 100% of the preferred frequency. This resultmay appear at first sight in contradiction with the tradeoff effect, which illustrates that longer RT hap-pens in more difficult conditions (Temprado, Monno, Zanone, & Kelso, 2002). Our result is, however,consistent with those obtained by (Summers, Maeder, Hiraga, & Alexander, 2008), in which partici-pants performed bimanual coordination at the frequency of 1 Hz or 1.7 Hz. RT was answered vocallywhen the visual stimuli appeared. Their results showed that higher frequency movements were lessstable than lower frequency movements, and that participants answered faster when coordinatingat higher frequency compared to lower frequency. Both our and Summer et al.’s results suggest thatthere may be other factors affecting the tradeoff effect. The phenomenon might be partially attributedto differences in the experimental design. In Temprado et al.’s study of bimanual coordination (i.e.,Temprado et al., 2002), participants usually answered RT with their feet. RT was answered vocallyin Summer et al.’s study, and it was answered with the non-dominant hand in our study.Furthermore, an auditory stimulus was usually used in Temprado et al.’s experiment, whereas a visualstimulus was presented in Summer et al.’s and in our experiment.
Moreover, we propose two additional reasons that explain that participants reacted significantlyfaster at 150% compared to the 100% of their preferred frequency: the absence of lateralized interfer-ence, and the nature of inter-limb coordination. We reckon that it is the sum of these two effects thatcontributes to the result.
Absence of lateralized interference: in the study conducted by Temprado and Laurent (2004)investigating the attentional load for interpersonal coordination, participants performed both theRT and the motor coordination task with the same hand. A tradeoff effect between motor coordinationand RT was found in their study, probably because of the effect of lateralized interference since thedominant hand performing motor coordination and the effector involved in RT task are controlledby the same cerebral hemisphere. In our study, however, participants used two different hands to per-form these two tasks, which involved two different cerebral hemispheres. Therefore there was nolateralized interference in our study. Even though a significant tradeoff effect existed, the low valueof the slope of the linear RT – SD relative phase regression suggested that changes in SD of relativephase did not induce a large difference in RT. Therefore, even if SD of relative phase at 150% of the pre-ferred frequency was significantly higher than at 100%, it did not contribute significantly to the incre-ment of RT.
Nature of human inter-limb coordination: Kelso, Southard, and Goodman (1979) proposed that inbimanual coordination, both hands are considered by the central nervous system as a single unit,and they accommodate each other to reach peak velocity and acceleration simultaneously (Kelsoet al., 1979). In such a context, it is more difficult to move the two hands at different frequencysimultaneously than at the same frequency. In our study, therefore, it is reasonable to assume thatthe hand responsible for answering RT might have moved faster when the dominant hand was movingat a higher frequency, suggesting that the two hands tended to move as a single unit at the samefrequency.
4.3. Circular relationship between likability and interpersonal coordination
Important for our hypothesis is the fact that all three agents (less attractive, attractive, and pointlight display) moved in the same way since their ‘‘pre-recorded’’ movement was actually generatedby Matlab; therefore the difference in the stability of motor coordination could not be attributed tobehavioral difference between agents. Moreover, our result could also not be explained by the

Z. Zhao et al. / Human Movement Science 41 (2015) 240–254 251
hypothesis that participants paid more attention to coordinating with the moving attractive agent, asthe RT results indicate there was no attentional difference in coordinating with different agents.
Taking into account the close relationship between physical attractiveness and likability, the circu-lar relationship between likability and motor coordination may provide an explanation for the resultthat the moving physically attractive agent yielded the most stable motor coordination. On one hand,motor coordination stability is sensitive to the likability between interactants. Likability between peo-ple can be seen as social glue that maintains the two interactants in a close relationship. From thedynamical approach perspective, a dyad with higher likability may exhibit more stable pattern ofmotor coordination. Previous studies showed that individuals exhibit better coordination with like-able compared to less likeable people (Miles et al., 2009, 2010; Schmidt & Richardson, 2008). Onthe other hand, because motor coordination can also promotes likability (Hove & Risen, 2009), morestable coordination could also entrain participants’ willingness to establish a closer relationship withthe attractive agents. Participants having more stable coordination can be interpreted as an attempt toestablish a better relationship with the attractive agent. In short, our result is in favor of the positiveeffect of physical attractiveness may exert on social interaction, and that the way we interact withothers conveys the message about how much we are willing to establish a good relationship withthem.
As for the post-experiment question where all participants rated likability for agent’s picture, weassume that this marginal difference in likability (p = .052) is due to the fact that participantsanswered the question after the motor coordination task, confirming previous findings concerningmotor coordination’s impact on psychosocial properties (i.e., Hove & Risen, 2009). Interestingly, theresult suggests that motor coordination increases likability of the less attractive agent, cancelingthe effect of physical attractiveness. This is consistent with our life experience that acting syn-chronously with someone we do not like at first impression, makes the person more likeable after acertain time of interaction.
To be noticed, the most stable motor coordination was obtained with the attractive agent displayedin a dynamic, not static, way. This result suggests an interaction between physical attractiveness andmoving status. In order to confirm such an interaction, six subjects who participated in the experimentwere asked post-hoc to rate the level of likability of the agent displayed on pictures and videos and towhat extent they felt they were coordinating with real persons. Non-parametric tests showed that thelikability of the moving attractive agent was significantly higher than other displays (p < .05), exceptfor the static attractive agent. Regarding the interactive experience, participants felt the situationmore interactive with moving attractive agent than with other static or moving agents (p < .05).Surprisingly, no difference in interactive experience was found between the moving less attractiveagent and the static less attractive agent. In the debriefing part, five of these participants reported thatthey did not feel human-human interactive experience with the less attractive moving agent becausehe was not attractive, even if he was moving. Four of these participants believed that the movingattractive agent was really interacting with them. Therefore the higher coordination stability withthe moving attractive agent was somehow resulting from the interactive effect of physical attractive-ness and moving state. It also indicates that less physical attractiveness reduced the stronger effect asa social affordance that videos may exert over pictures. Finally, since movement is always present inreal human-human interaction, we may generalize that physical attractiveness influence the stabilityof motor coordination in social interaction.
4.4. Psychosocial properties and interpersonal coordination
The finding that participants’ coordinated behavior varied with the difference in attractivenessechoes the result obtained by Gianelli, Scorolli, and Borghi (2013), who investigated whether reach-to-grasp movement is affected by the presence of a friend or a non-friend. The authors found shorterlatencies of both maximal fingers aperture and velocity peak in the presence of a non-friend comparedto a friend, signaling a competitive relationship with a non-friend (Gianelli et al., 2013). Both Gianelliet al.’ study and our own study showed the influence of social factors on motor behavior measured inan objective way. The difference, however, resides in that the presence of a friend or a non-friend was

252 Z. Zhao et al. / Human Movement Science 41 (2015) 240–254
considered as a social context in their study, whereas in our study the social properties indicated bythe person’s appearance elicited different motor coordination.
Our result that individuals’ psychosocial traits influence socio-motor coordination opens a windowfor exploring the effect of additional psychosocial factors on motor behavior. According to theGibsonian approach of social perception, if the psychosocial properties afford different coordinatedbehavior, it is reasonable to assume that other psychosocial traits can also afford different movementpattern. Moreover, future research can also focus on how people coordinate with others who share thesame or different psychosocial traits. We may have life experience that some individuals get alongwell with people sharing similar traits, whereas some prefer making friends with those different fromthemselves. In their study for instance, Schmidt et al. (1994) showed that the most stable pattern ofcoordination was the pair of individuals with complementary (high vs. low) social competence, sug-gesting that complementary social competences rather than competing ones may be the best triggerfor social cohesion (Schmidt et al., 1994).
To control the social properties and in order to measure precisely motor coordination, the human-to-agent social interaction used in this study was artificial and rather unnatural. Although this setupshowed some of the advantages discussed above, it can also be viewed as a drawback preventing ourfindings to be generalized to human-to-human interaction. In future experiments, interactionbetween real human beings are to be explored to see whether physical attractiveness genuinely influ-ences the way one interacts with others in a natural social context.
5. Conclusion
To date, our study shows a direct link between moving physical attractiveness and motor coordina-tion, confirming our intuition that the physical attractiveness modifies the way people move duringsocial interaction. It broadens the possibility for investigating additional psychosocial properties thatcould affect one’s social behavior.
Funding/financial disclosure
This research was supported by AlterEgo, a project funded by the European Union [Grant Number600610].
None of the authors have a financial interest in any of the products, devices, or drugs mentioned inthis manuscript.
References
Aguiar, N. R., & Taylor, M. (2014). Children’s concepts of the social affordances of a virtual dog and a stuffed dog. CognitiveDevelopment (0). http://dx.doi.org/10.1016/j.cogdev.2014.12.004.
Becchio, C., Sartori, L., Bulgheroni, M., & Castiello, U. (2008). The case of Dr. Jekyll and Mr. Hyde: A kinematic study on socialintention. Consciousness and Cognition, 17(3), 557–564. http://dx.doi.org/10.1016/J.Concog.2007.03.003.
Benson, P. L., Karabenick, S. A., & Lerner, R. M. (1976). Pretty pleases: The effects of physical attractiveness, race, and sex onreceiving help. Journal of Experimental Social Psychology, 12(5), 409–415. http://dx.doi.org/10.1016/0022-1031(76)90073-1.
Bernieri, F. (1988). Coordinated movement and rapport in teacher-student interactions. Journal of Nonverbal Behavior, 12(2),120–138. http://dx.doi.org/10.1007/bf00986930.
Brainard, D. H. (1997). The psychophysics toolbox. Spatial Vision, 10(4), 433–436. http://dx.doi.org/10.1163/156856897x00357.Byrne, D., London, O., & Reeves, K. (1968). Effects of physical attractiveness sex and attitude similarity on interpersonal
attraction. Journal of Personality, 36(2), 259–271. http://dx.doi.org/10.1111/J.1467-6494.1968.Tb01473.X.Dion, K., Walster, E., & Berschei, E. (1972). What is beautiful is good. Journal of Personality and Social Psychology, 24(3), 285.
http://dx.doi.org/10.1037/H0033731.Esteves, P. T., Araujo, D., Davids, K., Vilar, L., Travassos, B., & Esteves, C. (2012). Interpersonal dynamics and relative positioning
to scoring target of performers in 1 vs. 1 sub-phases of team sports. Journal Sports Sciences, 30(12), 1285–1293. http://dx.doi.org/10.1080/02640414.2012.707327.
Ferri, F., Campione, G. C., Volta, R. D., Gianelli, C., & Gentilucci, M. (2011). Social requests and social affordances: How they affectthe kinematics of motor sequences during interactions between conspecifics. PLoS One, 6(1). http://dx.doi.org/10.1371/journal.pone.0015855.
Gianelli, C., Scorolli, C., & Borghi, A. M. (2013). Acting in perspective: The role of body and language as social tools. PsychologicalResearch-Psychologische Forschung, 77(1), 40–52. http://dx.doi.org/10.1007/S00426-011-0401-0.
Gibson, J. J. (1979). The ecological approach to visual perception. Houghton Mifflin.
Z. Zhao et al. / Human Movement Science 41 (2015) 240–254 253
Haken, H., Kelso, J. A. S., & Bunz, H. (1985). A theoretical model of phase transitions in human hand movements. BiologicalCybernetics, 51(5), 347–356. http://dx.doi.org/10.1007/BF00336922.
Hove, M. J., & Risen, J. L. (2009). It’s all in the timing: Interpersonal synchrony increases affiliation. Social Cognition, 27(6),949–960.
Kelso, J. A. S., Scholz, J. P., & Schöner, G. (1986). Nonequilibrium phase transitions in coordinated biological motion: Criticalfluctuations. Physics Letters A, 118(6), 279–284. http://dx.doi.org/10.1016/0375-9601(86)90359-2.
Kelso, J. A. S., Southard, D. L., & Goodman, D. (1979). On the nature of human interlimb coordination. Science, 203(4384),1029–1031. http://dx.doi.org/10.1126/science.424729.
Kessler, H., Doyen-Waldecker, C., Hofer, C., Hoffmann, H., Traue, H. C., & Abler, B. (2011). Neural correlates of the perception ofdynamic versus static facial expressions of emotion. Psychosocial Medicine. http://dx.doi.org/10.3205/psm000072. 8, Doc03.
Kleiner, M., Brainard, D., & Pelli, D. (2007). What’s new in Psychtoolbox-3? Perception, 36. ECVP Abstract Supplement.LaBar, K. S., Crupain, M. J., Voyvodic, J. T., & McCarthy, G. (2003). Dynamic perception of facial affect and identity in the human
brain. Cerebral Cortex, 13(10), 1023–1033.Landy, D., & Sigall, H. (1974). Beauty is talent: task evaluation as a function of the performer’s physical attractiveness. Journal of
Personality and Social Psychology, 29(3), 299–304. http://dx.doi.org/10.1037/h0036018.Lorenzo, G. L., Biesanz, J. C., & Human, L. J. (2010). What is beautiful is good and more accurately understood: Physical
attractiveness and accuracy in first impressions of personality. Psychological Sciences, 21(12), 1777–1782. http://dx.doi.org/10.1177/0956797610388048.
Lumsden, J., Miles, L. K., Richardson, M. J., Smith, C. A., & Macrae, C. N. (2012). Who syncs? Social motives and interpersonalcoordination. Journal of Experimental Social Psychology, 48(3), 746–751. http://dx.doi.org/10.1016/j.jesp.2011.12.007.
Maner, J. K., Miller, S. L., Rouby, D. A., & Gailliot, M. T. (2009). Intrasexual vigilance: The implicit cognition of romantic rivalry.Journal of Personality and Social Psychology, 97(1), 74–87. http://dx.doi.org/10.1037/a0014055.
McCroskey, J. C., & McCain, T. A. (1974). The measurement of interpersonal attraction. Speech Monographs, 41, 261–266.Miles, L. K., Griffiths, J. L., Richardson, M. J., & Macrae, C. N. (2010). Too late to coordinate: Contextual influences on behavioral
synchrony. European Journal of Social Psychology, 40(1), 52–60. http://dx.doi.org/10.1002/Ejsp.721.Miles, L. K., Nind, L. K., & Macrae, C. N. (2009). The rhythm of rapport: Interpersonal synchrony and social perception. Journal of
Experimental Social Psychology, 45(3), 585–589. http://dx.doi.org/10.1016/j.jesp.2009.02.002.Nadler, A., Shapira, R., & Ben-Itzhak, S. (1982). Good looks may help: Effects of helper’s physical attractiveness and sex of helper
on males’ and females’ help-seeking behavior. Journal of Personality and Social Psychology, 42(1), 90–99. http://dx.doi.org/10.1037/0022-3514.42.1.90.
Neda, Z., Ravasz, E., Brechet, Y., Vicsek, T., & Barabasi, A. L. (2000). The sound of many hands clapping – Tumultuous applause cantransform itself into waves of synchronized clapping. Nature, 403(6772), 849–850. http://dx.doi.org/10.1038/35002660.
Paladino, M. P., Mazzurega, M., Pavani, F., & Schubert, T. W. (2010). Synchronous multisensory stimulation blurs self-otherboundaries. Psychological Sciences, 21(9), 1202–1207. http://dx.doi.org/10.1177/0956797610379234.
Pelli, D. G. (1997). The VideoToolbox software for visual psychophysics: Transforming numbers into movies. Spatial Vision, 10(4),437–442. http://dx.doi.org/10.1163/156856897x00366.
Pikovsky, A., Rosenblum, M., & Kurths, J. (2001). Synchronization: A Universal Concept in Nonlinear Science. Cambridge UniversityPress.
Ramseyer, F., & Tschacher, W. (2011). Nonverbal synchrony in psychotherapy: Coordinated body movement reflectsrelationship quality and outcome. Journal of Consulting and Clinical Psychology, 79(3), 284–295. http://dx.doi.org/10.1037/a0023419.
Ratcliff, R. (1993). Methods for dealing with reaction time outliers. Psychological Bulletin, 114(3), 510–532.Richardson, M. J., Marsh, K. L., Isenhower, R. W., Goodman, J. R. L., & Schmidt, R. C. (2007). Rocking together: Dynamics of
intentional and unintentional interpersonal coordination. Human Movement Science, 26(6), 867–891. http://dx.doi.org/10.1016/j.humov.2007.07.002.
Rizzolatti, G., Fadiga, L., Matelli, M., Bettinardi, V., Paulesu, E., Perani, D., et al (1996). Localization of grasp representations inhumans by PET: 1. Observation versus execution. Experimental Brain Research, 111(2), 246–252.
Ronsse, R., Sternad, D., & Lefevre, P. (2009). A computational model for rhythmic and discrete movements in uni- and bimanualcoordination. Neural Computation, 21(5), 1335–1370. http://dx.doi.org/10.1162/Neco.2008.03-08-720.
Schmidt, R. C., Bienvenu, M., Fitzpatrick, P. A., & Amazeen, P. G. (1998a). A comparison of intra- and interpersonal interlimbcoordination: Coordination breakdowns and coupling strength. Journal of Experimental Psychology-Human Perception andPerformance, 24(3), 884–900. http://dx.doi.org/10.1037/0096-1523.24.3.884.
Schmidt, R. C., Bienvenu, M., Fitzpatrick, P. A., & Amazeen, P. G. (1998b). A comparison of intra- and interpersonal interlimbcoordination: Coordination breakdowns and coupling strength. Journal of Experimental Psychology-Human Perception andPerformance, 24(3), 884–900.
Schmidt, R. C., Carello, C., & Turvey, M. T. (1990). Phase transitions and critical fluctuations in the visual coordination ofrhythmic movements between people. Journal of Experimental Psychology-Human Perception and Performance, 16(2),227–247.
Schmidt, R. C., Christianson, N., Carello, C., & Baron, R. (1994). Effects of social and physical variables on between-person visualcoordination. Ecological Psychology, 6(3), 159–183. http://dx.doi.org/10.1207/S15326969eco0603_1.
Schmidt, R. C., & O’Brien, B. (1997). Evaluating the dynamics of unintended interpersonal coordination. Ecological Psychology,9(3), 189–206. http://dx.doi.org/10.1207/s15326969eco0903_2.
Schmidt, R. C., & Richardson, M. J. (2008). Dynamics of interpersonal coordination. Coordination: Neural, Behavioral and SocialDynamics, 281–308. http://dx.doi.org/10.1007/978-3-540-74479-5_14.
Stanley, J., Gowen, E., & Miall, R. C. (2007). Effects of agency on movement interference during observation of a moving dotstimulus. Journal of Experimental Psychology-Human Perception and Performance, 33(4), 915–926. http://dx.doi.org/10.1037/0096-1523.33.4.915.
Summers, J. J., Maeder, S., Hiraga, C. Y., & Alexander, J. R. (2008). Coordination dynamics and attentional costs of continuous anddiscontinuous bimanual circle drawing movements. Human Movement Science, 27(5), 823–837. http://dx.doi.org/10.1016/j.humov.2007.11.003.

254 Z. Zhao et al. / Human Movement Science 41 (2015) 240–254
Temprado, J. J., & Laurent, M. (2004). Attentional load associated with performing and stabilizing a between-personscoordination of rhythmic limb movements. Acta Psychologica, 115, 1–16.
Temprado, J. J., Monno, A., Zanone, P. G., & Kelso, J. A. S. (2002). Attentional demands reflect learning-induced alterations ofbimanual coordination dynamics. European Journal of Neuroscience, 16(7), 1390–1394. http://dx.doi.org/10.1046/J.1460-9568.2002.02190.X.
van Ulzen, N. R., Lamoth, C. J. C., Daffertshofer, A., Semin, G. R., & Beek, P. J. (2008). Characteristics of instructed and uninstructedinterpersonal coordination while walking side-by-side. Neuroscience Letters, 432(2), 88–93. http://dx.doi.org/10.1016/J.Neulet.2007.11.070.
Wei, K. L., Wertman, G., & Sternad, D. (2003). Interactions between rhythmic and discrete components in a bimanual task. MotorControl, 7(2), 134–154.
Zebrowitz, L. A., & Collins, M. A. (1997). Accurate social perception at zero acquaintance: The affordances of a Gibsonianapproach. Personality and Social Psychology Review: An Official Journal of the Society for Personality and Social Psychology Inc.,1(3), 204–223.




















