Modeling of the unsteady force for shock–particle interaction
13
Shock Waves (2009) 19:317–329 DOI 10.1007/s00193-009-0206-x ORIGINAL ARTICLE Modeling of the unsteady force for shock–particle interaction M. Parmar · A. Haselbacher · S. Balachandar Received: 24 December 2008 / Revised: 27 April 2009 / Accepted: 28 April 2009 / Published online: 20 May 2009 © Springer-Verlag 2009 Abstract The interaction between a particle and a shock wave leads to unsteady forces that can be an order of magni- tude larger than the quasi-steady force in the flow field behind the shock wave. Simple models for the unsteady force have so far not been proposed because of the complicated flow field during the interaction. Here, a simple model is presented based on the work of Parmar et al. (Phil Trans R Soc A 366:2161–2175, 2008). Comparisons with experimental and computational data for both stationary spheres and spheres set in motion by shock waves show good agreement in terms of the magnitude of the peak and the duration of the unsteady force. Keywords Shock–particle interaction · Multiphase flow · Drag force · Unsteady flow · Compressible flow PACS 47.55.Kf · 47.40.Nm · 47.40.-x · 47.11.Df · 47.15.ki 1 Introduction The interaction between a particle and a shock wave has been studied extensively due to its practical importance, see, e.g., [14, 35], and many others. As the shock wave propa- gates into a gas-particle mixture, the gas velocity increases Communicated by O. Igra. M. Parmar · A. Haselbacher (B ) · S. Balachandar Department of Mechanical and Aerospace Engineering, University of Florida, MAE-B 222, P.O. Box 116300, Gainesville, FL 32611-6300, USA e-mail: haselbac@ufl.edu M. Parmar e-mail: mparmar@ufl.edu S. Balachandar e-mail: bala1s@ufl.edu instantaneously across the shock. By contrast, the particle velocity approaches the post-shock gas velocity only slowly due to the finite inertia of the particles. This leads to the so-called frozen-, relaxation-, and equilibrium regimes that have been discussed in detail by Carrier [5], Kriebel [17], Rudinger [31], and Soo [39]. Several investigations, see, e.g., [8, 14–16, 19, 30, 32, 41], have documented careful measure- ments of the time-dependent particle motion behind a shock wave. One important observation is that the particles gen- erally approach the equilibrium state faster than predicted by the standard drag relation. Thus, the above studies have inferred that the drag force on the particle, and hence the drag coefficient, are substantially enhanced in the post-shock flow. Direct time-resolved measurements of the force exerted by a shock wave propagating over a particle are very chal- lenging. The measurements need to resolve very small forces over a duration of milliseconds with a resolution of microsec- onds. Techniques with the required accuracy and resolution have only been developed relatively recently. Tanno et al. [42, 43] and Sun et al. [40] used an accelerometer installed inside the sphere. Bredin and Skews [2] and Skews et al. [37] used a stress-wave drag balance and reported time-dependent force measurement on a stationary particle with an estimated error of less than 15%. These experiments have shown that the force on the particle increases significantly as the shock wave passes over it. The peak force on the particle can be more than an order of magnitude larger than the steady-state force in the post-shock flow. Furthermore, it was observed that the transition from the peak force to the steady-state force can be non-monotonic. The propagation of a shock wave over a spherical obstacle such as a particle is very complicated, consisting of regu- lar and irregular shock-wave reflection, diffraction, and foc- using phenomena, see [4, 40, 42]. With recent advances in 123
Transcript of Modeling of the unsteady force for shock–particle interaction
Shock Waves (2009) 19:317–329DOI 10.1007/s00193-009-0206-x
ORIGINAL ARTICLE
Modeling of the unsteady force for shock–particle interaction
M. Parmar · A. Haselbacher · S. Balachandar
Received: 24 December 2008 / Revised: 27 April 2009 / Accepted: 28 April 2009 / Published online: 20 May 2009© Springer-Verlag 2009
Abstract The interaction between a particle and a shockwave leads to unsteady forces that can be an order of magni-tude larger than the quasi-steady force in the flow field behindthe shock wave. Simple models for the unsteady force have sofar not been proposed because of the complicated flow fieldduring the interaction. Here, a simple model is presentedbased on the work of Parmar et al. (Phil Trans R Soc A366:2161–2175, 2008). Comparisons with experimental andcomputational data for both stationary spheres and spheresset in motion by shock waves show good agreement in termsof the magnitude of the peak and the duration of the unsteadyforce.
Keywords Shock–particle interaction · Multiphase flow ·Drag force · Unsteady flow · Compressible flow
PACS 47.55.Kf · 47.40.Nm · 47.40.-x · 47.11.Df · 47.15.ki
1 Introduction
The interaction between a particle and a shock wave hasbeen studied extensively due to its practical importance, see,e.g., [14,35], and many others. As the shock wave propa-gates into a gas-particle mixture, the gas velocity increases
Communicated by O. Igra.
M. Parmar · A. Haselbacher (B) · S. BalachandarDepartment of Mechanical and Aerospace Engineering,University of Florida, MAE-B 222, P.O. Box 116300,Gainesville, FL 32611-6300, USAe-mail: [email protected]
M. Parmare-mail: [email protected]
S. Balachandare-mail: [email protected]
instantaneously across the shock. By contrast, the particlevelocity approaches the post-shock gas velocity only slowlydue to the finite inertia of the particles. This leads to theso-called frozen-, relaxation-, and equilibrium regimes thathave been discussed in detail by Carrier [5], Kriebel [17],Rudinger [31], and Soo [39]. Several investigations, see, e.g.,[8,14–16,19,30,32,41], have documented careful measure-ments of the time-dependent particle motion behind a shockwave. One important observation is that the particles gen-erally approach the equilibrium state faster than predictedby the standard drag relation. Thus, the above studies haveinferred that the drag force on the particle, and hence thedrag coefficient, are substantially enhanced in the post-shockflow.
Direct time-resolved measurements of the force exertedby a shock wave propagating over a particle are very chal-lenging. The measurements need to resolve very small forcesover a duration of milliseconds with a resolution of microsec-onds. Techniques with the required accuracy and resolutionhave only been developed relatively recently. Tanno et al.[42,43] and Sun et al. [40] used an accelerometer installedinside the sphere. Bredin and Skews [2] and Skews et al. [37]used a stress-wave drag balance and reported time-dependentforce measurement on a stationary particle with an estimatederror of less than 15%. These experiments have shown thatthe force on the particle increases significantly as the shockwave passes over it. The peak force on the particle can bemore than an order of magnitude larger than the steady-stateforce in the post-shock flow. Furthermore, it was observedthat the transition from the peak force to the steady-state forcecan be non-monotonic.
The propagation of a shock wave over a spherical obstaclesuch as a particle is very complicated, consisting of regu-lar and irregular shock-wave reflection, diffraction, and foc-using phenomena, see [4,40,42]. With recent advances in
123
318 M. Parmar et al.
numerical methods and computer performance, highly accu-rate direct numerical simulations of shock–particle interac-tion have been accomplished. One example is the work of Sunet al. [40], who obtained good agreement with their ownmeasurements. The simulations captured the increase of theinstantaneous drag force by more than an order of mag-nitude as the shock wave propagates over the particle aswell as the non-monotonic approach to the steady state. Sunet al. [40] observed that the maximum drag coefficient occursslightly after the shock-wave reflection changes from a regu-lar to a Mach reflection and that the minimum drag coefficientappears to be due to the focusing of the diffracted shock waveat the rear of the sphere.
In many applications, shock waves interact with millionsto billions of particles. In such situations, the detailedresolution of the interaction between the shock wave andeach particle is not feasible. Instead, one needs to resort tothe Eulerian-Lagrangian point-particle approach and trackthe trajectory of a sufficiently large number of particles asthey interact with the shock wave. The key component ofthis approach is a model that accurately predicts the instan-taneous force on the particles. The commonly used standard-drag model, see, e.g., [7], parameterizes the drag coefficientin terms of the particle Reynolds number based on the par-ticle diameter and the velocity of the particle relative to thatof the surrounding gas. Even with compressibility correc-tions that account for finite-Mach-number effects, see, e.g.,[21], the standard-drag correlation is appropriate only forthe quasi-steady state that is established long after the pas-sage of the shock wave. The large increase in instantaneousdrag and the subsequent non-monotonic approach to steadystate is clearly due to the unsteady effect resulting from thepropagation of the shock wave over the particle. This strongtime-dependent component of the force cannot be accountedfor with quasi-steady force models.
In incompressible flows, it has been well established thatunsteadiness, either due to acceleration of the particle orof the surrounding fluid, gives rise to additional inviscid(pressure-gradient and added-mass) and viscous (Basset his-tory) forces, see, e.g., [18]. Recently, our understanding ofand models for these forces have been extended to finite par-ticle Reynolds numbers (see, e.g., [6,23,28,45]). However,the existing unsteady-force parameterizations are developedfor the incompressible limit, and are, therefore, incapable ofaccurately predicting the strong variation in drag force as theshock wave propagates over the particle.
The earliest investigations of unsteady forces in the com-pressible regime, due to Love [22] and Taylor [44], focusedon the inviscid contribution only. Subsequently, Longhorn[20] and Miles [27] considered the effect of compressibil-ity on unsteady inviscid forces on a cylinder and a sphere,respectively, in the zero-Mach-number limit using the acous-tic approximation of the velocity potential equation. More
recently, Parmar et al. [29] extended the results of Miles andLonghorn to finite Mach number.
It is important to note that the conventional concept ofadded mass is of limited use in compressible flows, becausecompressibility destroys the straightforward dependence ofthe inviscid unsteady force on the instantaneous acceleration.Instead, in a compressible fluid, a particle accelerated impul-sively as a(t) = δ(t), where δ(t) is the Dirac delta function,is subjected to a time-dependent inviscid force that decays onthe acoustic time scale c∞/R, where c∞ is the speed of soundin the ambient fluid and R is the particle radius. The invis-cid unsteady force can be represented in terms of a historyintegral that uses a kernel to weigh the history of the particleacceleration relative to the fluid acceleration. The decay ofthe kernel in terms of the non-dimensional time τ = c∞t/Rdepends on both the geometry of the particle and the Machnumber M formed from the velocity of the particle relativeto that of the fluid and c∞. The kernels for a cylinder and asphere in the limit of zero Mach number were obtained byLonghorn [20] and Miles [27], respectively. The correspond-ing kernels at finite but subcritical Mach numbers (M � 0.4for a cylinder and M � 0.6 for a sphere) were obtained byParmar et al. [29]. They observed that as the Mach numberincreases, the kernel changes such that the effective inviscidunsteady force can be more than double of its value in thezero-Mach-number limit.
The objective of this paper is to present a physics-basedforce model for unsteady compressible flows that combinesthe inviscid unsteady force expressed in terms of a historyintegral with the standard quasi-steady drag force. We willdemonstrate that the resulting simple model provides the abil-ity to predict the time-dependent force on a spherical parti-cle as a shock wave propagates over it. Recent time-resolvedmeasurements of the force exerted by a shock wave prop-agating over a stationary sphere by Bredin and Skews [2],Skews et al. [37], Sun et al. [40], and Tanno et al. [42,43]and their companion numerical simulation results will beused to evaluate the accuracy of the force model. In theseexperiments and computations, the shock-wave Mach num-ber Ms is sufficiently low that the Mach number of the flowbehind the shock wave is subcritical, thus permitting the useof the finite-Mach-number kernels obtained by Parmar et al.[29]. Results from the force model will also be presented forthe case of a sphere set in motion by the impact of a shockwave and compared to experimental and computational dataof Britan et al. [3]. Despite its simplicity, the model appears tocapture the essential features of the unsteady force during theshock–particle interaction remarkably well in all cases. TheEulerian-Lagrangian point-particle approach with the pro-posed force model can thus be used as an efficient approachto compute compressible multiphase flows involving shockwaves propagating through suspensions containing largenumbers of particles.
123

Modeling of the unsteady force for shock–particle interaction 319
2 Force model
2.1 Force parameterization
Magnaudet and Eames [23] suggested that the force F(t) ona particle in an incompressible flow can be parameterized fora range of particle Reynolds numbers as
F(t) = Fqs(t) + Fiu(t) + Fvu(t) + Fl(t) + Fbg(t), (1)
where the terms on the right-hand side represent quasi-steady,inviscid unsteady (added-mass and pressure-gradient), vis-cous unsteady (Basset history), lift, and buoyancy/gravityforces, respectively. Equation (1) is based on the assump-tion that the particle is much smaller than a characteristiclength scale of the surrounding flow; this will be discussedfurther below. We emphasize here that the inviscid unsteadyforce Fiu consists of two contributions, namely the added-mass and pressure-gradient forces. The former is the forcearising from the no-penetration condition on the particle sur-face whenever the relative acceleration between the particleand the ambient fluid is non-zero. The latter may be inter-preted as the force that existed due to an ambient pressuregradient in the absence of the particle, i.e., if the particle werereplaced by the fluid.
The above parameterization is applicable in the compress-ible regime also provided appropriate modifications are madeto the modeling of the different terms. In a compressible flow,the quasi-steady drag will depend on both the Reynolds andMach numbers. An empirical relation for the quasi-steadydrag coefficient on a spherical particle in incompressible flowcan be expressed as
CD,qs(Re) = ‖Fqs‖12ρ f ‖ur‖2π R2
= 24
Reφ(Re) + 0.42
(1 + 42500
Re1.16
)−1
, (2)
where Re = 2ρ f ‖ur‖R/µ is the particle Reynolds numberbased on the fluid density ρ f , the relative velocity ur = u−vbetween the particle and the surrounding gas, the particlediameter 2R, and the dynamic fluid viscosity µ, see [7]. Inthe above, ρ f and µ are the density and dynamic viscos-ity of the surrounding gas and φ(Re) = 1 + 0.15Re0.687, see[34]. Provided that the particle Mach number M = ‖ur‖/c∞remains below the critical value (approximately 0.6 for asphere), the flow around the particle is entirely subsonic.Therefore, the effect of compressibility is relatively smalland the use of an incompressible relation for the drag coeffi-cient is justified. Above the critical Mach number, the effectof compressibility cannot be neglected and modified forms of(2) must be considered, see, e.g., [21]. We restrict attentionto subcritical Mach numbers in this article. (Under super-critical conditions, preliminary simulations indicate that the
inviscid unsteady force is negligible compared to changesin the quasi-steady drag as the relative velocity is varied.A possible, but perhaps only partial, explanation for thisobservation is that the quasi-steady drag force Fqs , whichnow includes a substantial contribution from shock waves,increases faster than the unsteady inviscid force Fiu with theMach number).
As discussed in the introduction, the dependence of theinviscid unsteady force on the instantaneous acceleration islost with the introduction of compressibility. Instead, theinviscid unsteady force on a particle depends on a weightedintegral of the acceleration history. Following the suggestionof Parmar et al. [29], the inviscid unsteady force on a particlein a compressible flow can be modeled as
Fiu(t) =t∫
−∞K
(Dm f u
Dt− dm f v
dt
)d
(c∞χ
R
)
+∫
ρ fDuDt
dV, (3)
where K = K (c∞(t − χ)/R; M) is the compressible invis-cid unsteady force kernel, M is the particle Mach number,m f is the mass of the fluid displaced by the particle, D(·)/Dtis the rate of change following the undisturbed ambient fluid,and d(·)/dt is rate of change following the particle. Note thatthe above equation incorporates the effect of density changesin the ambient fluid as suggested by Eames and Hunt [9] andthat the second term on the right-hand side is the pressure-gradient force. The decay of the kernel in terms of the non-dimensional time τ = c∞t/R depends on both the geometryof the particle and the Mach number M . For a spherical par-ticle, an explicit expression for the inviscid unsteady forcekernel in the zero-Mach-number limit was obtained by Long-horn [20] as
Ksp(τ ) = exp(−τ) cos τ. (4)
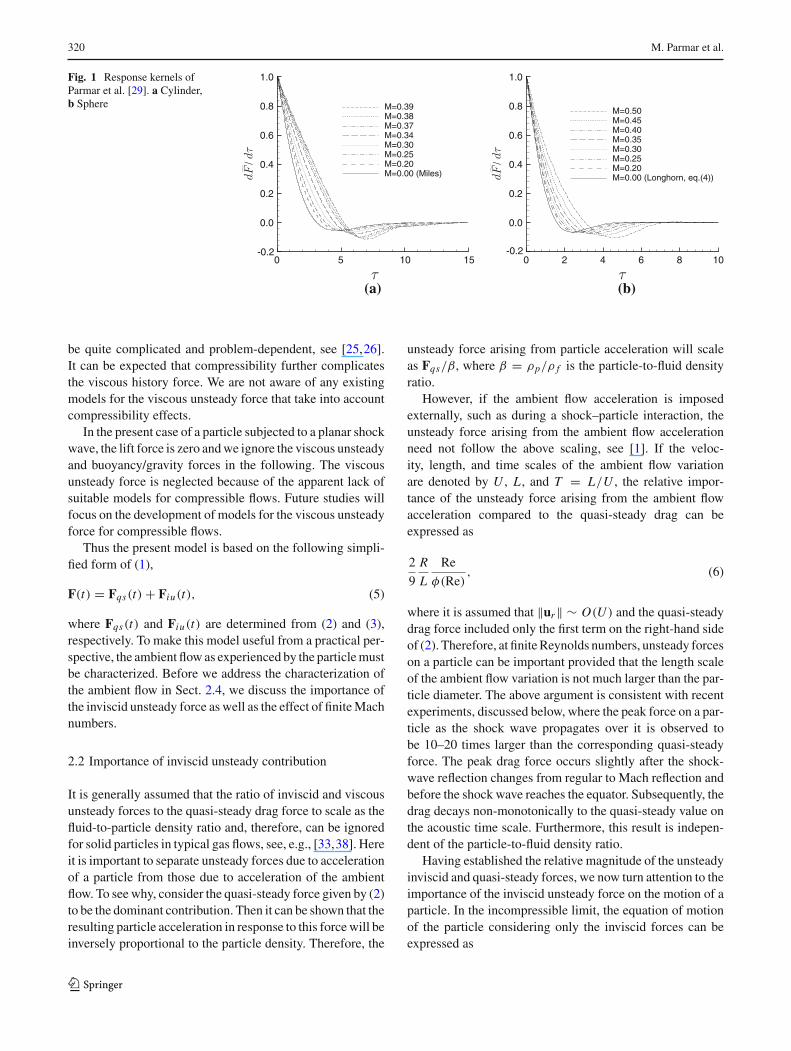
The corresponding kernels at finite but subcritical Mach num-bers were presented by Parmar et al. [29]. The kernels wereobtained from computed time histories of the force on a par-ticle in response to suddenly imposed constant accelerationsonce a steady state is established at a given Mach num-ber. Provided the acceleration is sufficiently small, so thatthe change in Mach number during the period of constantacceleration is negligible, the extracted kernels can be inter-preted to be associated with the given Mach number. Thekernels obtained by Parmar et al. [29] for cylindrical andspherical bodies over a range of Mach numbers are shown inFig. 1.
The viscous unsteady force in the compressible regimewill depend on both the particle Reynolds and Mach num-bers and also takes the form of a history integral. The historykernel for the viscous unsteady force has been extensivelystudied in incompressible flow. Its form has been shown to
123
320 M. Parmar et al.
Fig. 1 Response kernels ofParmar et al. [29]. a Cylinder,b Sphere
(a) (b)
be quite complicated and problem-dependent, see [25,26].It can be expected that compressibility further complicatesthe viscous history force. We are not aware of any existingmodels for the viscous unsteady force that take into accountcompressibility effects.
In the present case of a particle subjected to a planar shockwave, the lift force is zero and we ignore the viscous unsteadyand buoyancy/gravity forces in the following. The viscousunsteady force is neglected because of the apparent lack ofsuitable models for compressible flows. Future studies willfocus on the development of models for the viscous unsteadyforce for compressible flows.
Thus the present model is based on the following simpli-fied form of (1),
F(t) = Fqs(t) + Fiu(t), (5)
where Fqs(t) and Fiu(t) are determined from (2) and (3),respectively. To make this model useful from a practical per-spective, the ambient flow as experienced by the particle mustbe characterized. Before we address the characterization ofthe ambient flow in Sect. 2.4, we discuss the importance ofthe inviscid unsteady force as well as the effect of finite Machnumbers.
2.2 Importance of inviscid unsteady contribution
It is generally assumed that the ratio of inviscid and viscousunsteady forces to the quasi-steady drag force to scale as thefluid-to-particle density ratio and, therefore, can be ignoredfor solid particles in typical gas flows, see, e.g., [33,38]. Hereit is important to separate unsteady forces due to accelerationof a particle from those due to acceleration of the ambientflow. To see why, consider the quasi-steady force given by (2)to be the dominant contribution. Then it can be shown that theresulting particle acceleration in response to this force will beinversely proportional to the particle density. Therefore, the
unsteady force arising from particle acceleration will scaleas Fqs/β, where β = ρp/ρ f is the particle-to-fluid densityratio.
However, if the ambient flow acceleration is imposedexternally, such as during a shock–particle interaction, theunsteady force arising from the ambient flow accelerationneed not follow the above scaling, see [1]. If the veloc-ity, length, and time scales of the ambient flow variationare denoted by U , L , and T = L/U , the relative impor-tance of the unsteady force arising from the ambient flowacceleration compared to the quasi-steady drag can beexpressed as
2
9
R
L
Re
φ(Re), (6)
where it is assumed that ‖ur‖ ∼ O(U ) and the quasi-steadydrag force included only the first term on the right-hand sideof (2). Therefore, at finite Reynolds numbers, unsteady forceson a particle can be important provided that the length scaleof the ambient flow variation is not much larger than the par-ticle diameter. The above argument is consistent with recentexperiments, discussed below, where the peak force on a par-ticle as the shock wave propagates over it is observed tobe 10–20 times larger than the corresponding quasi-steadyforce. The peak drag force occurs slightly after the shock-wave reflection changes from regular to Mach reflection andbefore the shock wave reaches the equator. Subsequently, thedrag decays non-monotonically to the quasi-steady value onthe acoustic time scale. Furthermore, this result is indepen-dent of the particle-to-fluid density ratio.
Having established the relative magnitude of the unsteadyinviscid and quasi-steady forces, we now turn attention to theimportance of the inviscid unsteady force on the motion of aparticle. In the incompressible limit, the equation of motionof the particle considering only the inviscid forces can beexpressed as
123

Modeling of the unsteady force for shock–particle interaction 321
ρpdvdt
= 1
2ρ f
(DuDt
− dvdt
)+ ρ f
DuDt
, (7)
where consistency with (3) is obtained if we take
Ksp(τ ) = H(τ )δ(τ ), (8)
where H(t) is the Heaviside step function and δ(t) is theDirac delta function. In this limit, the particle accelerationis directly proportional to the instantaneous acceleration ofthe ambient flow. Thus, if we consider the ambient flow tojump from u1 = 0 to a uniform velocity of u2 > 0, the corre-sponding jump in the particle velocity due to inviscid forcescan be estimated to be
v2
u2= 3
2β + 1, (9)
where β is the particle-to-fluid density ratio.With the introduction of compressibility, the simple linear
dependence of the inviscid unsteady force on instantaneousacceleration is lost and the force must be expressed in termsof the history integral (see (3)). The equation of motion forthe particle, accounting for only the inviscid forces, can nowbe written as
βdvdt
+ K ∗ dvdt
= DuDt
+ K ∗ DuDt
, (10)
where m f is assumed to be a constant and the followingnotation for the convolution integral has been adopted:
f (t) ∗ g(t) =t∫
−∞f (t − χ)g(χ) dχ. (11)
In the zero-Mach-number limit, the analytic kernel obtainedby Longhorn [20] given by (4) applies. The equation ofmotion can be integrated with the above kernel to againobtain (9) for the velocity jump of the particle due to invis-cid forces. The above simple analysis clearly illustrates thefollowing two important points. First, the inviscid unsteadycontribution and the compressibility of the flow are of criti-cal importance in accurately accounting for the rapid increasein the drag force on the particle that occurs on the acoustictime scale. Second, when considering the integrated effect onparticle motion, the contribution from inviscid forces is pro-portional to the fluid-to-particle density ratio β−1. Of course,the particle velocity will continue to change and approach thepost-shock gas velocity due to the action of viscous forces.While the inviscid unsteady force acts on a very short acous-tic time scale, the viscous force acts on a much longer timescale.
2.3 Effect of finite Mach number
As discussed in Sect. 2.1, the effect of the Mach number onquasi-steady drag is quite weak in the subcritical regime. In
the context of a shock wave propagating over a stationaryparticle, the flow around the particle will remain subcriticalprovided that Ms � 1.5. The effect of the Mach number onthe inviscid unsteady force appears through the dependenceof the kernel on the Mach number. From Fig. 1 it can be seenthat with increasing Mach number in the subcritical regimethe rate of decay of the kernel becomes smaller, suggesting amore extended influence of unsteadiness. As a result, the peakforce at M = 0.5 was observed to be about twice as largeas that at M → 0. Furthermore, the time at which the peakforce occurs is also nearly double [29]. It can, therefore, beexpected that the Mach number of the post-shock flow playsan important role in determining the magnitude and timingof the peak drag force as the shock wave propagates over theparticle.
The impact of the Mach number on the integrated effectof the inviscid unsteady force can now be investigated. As inParmar et al., we first define an effective added-mass coeffi-cient as
CM,eff(M) =∞∫
0
K
(c∞t
R; M
)d
(c∞t
R
). (12)
In the zero-Mach-number limit, we recover the added-masscoefficient for incompressible flow as CM,eff (M → 0) →0.5. Using the finite-Mach-number kernels, such as thosepresented in Fig. 1, the effective added-mass coefficient canbe calculated for M > 0. In particular, for a spherical particlewe observe CM,eff(M → 0.5) ≈ 1.0, i.e., double its valuein the zero-Mach-number limit.
To obtain the jump in particle velocity, we integrate theequation of motion in time from −∞ to ∞. Because the ker-nel K has compact support, (10) can be integrated using theconvolution theorem to obtain the following exact relation,
v2
u2= 1 + CM,eff(M)
β + CM,eff (M). (13)
This expression is valid for finite Mach numbers and is inde-pendent of the manner in which the fluid velocity varies fromthe quiescent state ahead of the shock wave to u2 behindthe shock wave. The only limitation is that the change inMach number incurred during the change in fluid velocity isassumed to be small enough so that m f can be assumed tobe constant and that the effective added-mass coefficient canbe defined for the given Mach number. In the incompressiblelimit, (13) reduces to (9). If the particle density is much largerthan that of the surrounding gas, i.e., if β → ∞, we obtainfrom (9) and (13),
123

322 M. Parmar et al.
(v2
u2
)M
= 2
3
(1 + CM,eff(M)
) (v2
u2
)M=0
, (14)
and hence the jump in particle velocity for a post-shock Machnumber of 0.5 will be approximately 4/3 times larger than thejump for incompressible flow.
2.4 Approximation of ambient flow
The force parameterization given by (3) assumes the particleto be sufficiently small compared to the length scales of theambient flow. This allows unambiguous definitions of c∞,M , and m f as the speed of sound, particle Mach number,and displaced mass of the ambient fluid as experienced bythe particle. On the other hand, if the ambient flow variationsoccur on a scale comparable to the size of the particle, unam-biguous definitions of these quantities are not possible. Thisis certainly the case for a shock–particle interaction, sincethe shock wave can be interpreted as a discontinuity with athickness of the order of the mean free path, see, e.g., [36].Although the flow ahead of and behind the shock wave canbe considered homogeneous, the ambient flow is stronglyinhomogeneous as the shock wave passes over the parti-cle. Therefore, unambiguous values of the quantities listedabove as well as of quantities such as the Mach number,density, and viscosity of the ambient flow as “seen” by theparticle are not easily defined. One needs to resort to mod-eling and identify models that best capture the underlyingphysics.
The present model is based on a simplified one-dimen-sional description of the interaction of the shock wave withthe particle. More specifically, we assume the shock wave tobe planar, infinitely thin, and to propagate over the volumeoccupied by the particle in its undisturbed form, as illustratedschematically in Fig. 2. The implications of these simplifi-cations are discussed in Sect. 4. At any time t , the particlecan, therefore, be thought to be divided into two parts cor-responding to the homogeneous states ahead of and behindthe shock wave. In the following, these states are denoted bythe subscripts 1 and 2, respectively. The cross-sectional areaof the particle cut by the shock wave is denoted by A(t) andthe volumes of the particle ahead of and behind the shock aredenoted by V1(t) and V2(t), respectively.
To describe the ambient flow experienced by the particle,we define the reference time t = 0 to correspond to the instantwhen the shock wave makes contact with the particle. Beforethis reference time, the particle is entirely immersed in thequiescent ambient fluid upstream of the shock wave. As theshock wave moves over the particle, the particle experiencesboth regions, and hence the effective ambient flow seen bythe particle is necessarily a combination of the upstream anddownstream conditions. Once the shock wave has moved pastthe particle the ambient flow seen by the particle is given by
Fig. 2 Schematic of shock position in the symmetry plane of a spher-ical particle and definition of variables
the downstream state. The position of the shock wave withrespect to the front of the particle is given by
ξs(x ′s(t)) = x ′
s(t)
R= 1 + 1
R
(xs(t) − x p(t)
)
= 1 + 1
R
⎛⎝ust −
t∫−∞
v(ζ ) dζ
⎞⎠ , (15)
where xs(t) and x p(t) are the positions of the shock waveand (the centroid of) the particle, respectively, us is the ambi-ent shock velocity (assumed to be constant), and v(t) is thevelocity of the particle obtained from Newton’s second law,
v(t) = 1
m p
t∫−∞
F(ζ ) dζ, (16)
where m p is the mass of the particle and F(t) is the unsteadydrag force determined from (5). (We use the scalar force F(t)in (16) for the x-component of the vector force F(t) in (5)because we assume the interaction to be one-dimensional).
We propose a simple model for the ambient flow velocityand fluid properties “seen” by the particle to be an averageof the upstream and downstream flow conditions, weightedby the swept volume. Elementary geometry allows the sweptvolume V2(x ′
s(t)) to be expressed in terms of x ′s(t) as
V2(x ′s(t))
V=
⎧⎨⎩
0 if ξs ≤ 0,14 (3 − ξs)ξ
2s if 0 < ξs ≤ 2,
1 if 2 < ξs,
(17)
where V = V1(x ′s(t))+ V2(x ′
s(t)) and A(x ′s(t)) follows sim-
ilarly. Therefore, the fluid velocity u(x ′s(t)) as “seen” by the
123

Modeling of the unsteady force for shock–particle interaction 323
particle can be expressed as
u(x ′s(t)) − u1
u2 − u1=
⎧⎪⎪⎨⎪⎪⎩
0 if ξs ≤ 0,
V2(x ′s)
Vif 0 < ξs ≤ 2,
1 if 2 < ξs .
(18)
The flow acceleration can be defined as
1
u2 − u1
du(x ′s(t))
dt=
⎧⎪⎪⎨⎪⎪⎩
0 if ξs ≤ 0,
A(x ′s)
V
dx ′s
dtif 0 < ξs ≤ 2,
0 if 2 < ξs .
(19)
The density ρ(x ′s(t)) and the rate of change of density
(dρ(x ′s(t))/dt)/(ρ2−ρ1) are defined analogously. The above
expressions are used to evaluate the instantaneous particleReynolds and Mach numbers in (2) and (3),
Re(t) = 2ρ f (x p(t))(u(x p(t)) − v(t))R
µ, (20)
M(t) = u(x p(t)) − v(t)
c(x p(t)), (21)
where µ is the dynamic viscosity (assumed to be a constantfor simplicity), and c(x p(t)) is the speed of sound at the par-ticle location. The latter is computed from the constancy ofthe total temperature in a frame of reference moving with theshock and the velocity determined from (18). The instanta-neous Mach number is used to select the appropriate kernelin the integration of (3). The kernels are tabulated as a func-tion of M and τ for the values given in the legend of Fig. 1b;values in between the tabulated data points are interpolatedlinearly.
The use of the volume ratio in (18) to model the veloc-ity and density “seen” by the particle is somewhat arbitrary.Other models are possible, of course. For example, the sur-face-area ratio S2/S may be more appropriate for the com-putation of the quasi-steady drag according to the Faxén cor-rection, see [10,24]. We have found the results obtained withthe surface-area ratio to be similar to those obtained with thevolume ratio.
Finally, we note that the pressure-gradient force in (3) canbe computed as
∫ρ f
Du
DtdV = −
∫∂p
∂xdV = (p2 − p1)A(x ′
s(t))
= 2γ
γ + 1
(M2
s − 1)
p1 A(x ′s(t)), (22)
for a finite-sized particle where γ is the ratio of specific heatsand Ms = us/c1 is the shock-wave Mach number.
3 Results
The model described in Sect. 2 is assessed by comparisonwith computational and experimental results for the interac-tion of shock waves with spheres. First, we consider the caseof a stationary spherical particle subjected to a normal shockwave. The predicted force on the particle is compared withexperimental and computational results. Second, we considerthe case of a spherical particle set in motion by the impactof a shock wave. The predicted particle position and veloc-ity are compared against experimental and numerical results.All cases are based on a ratio of specific heats of γ = 1.4and a specific heat of the gas of C p = 1004.64 J/(kg K).The results are presented in terms of the drag coefficientCD(t) = F(t)/( 1
2ρ2u22π R2) and the non-dimensional time
τs = ust/R. With this definition of the non-dimensionaltime, the undisturbed shock wave has propagated past thesphere at τs = 2.
3.1 Stationary sphere
In the following, we compare the present model to the exper-iments and simulations of Sun et al. [40] and to the experi-ments of Skews et al. [37]. The former allow us to study theeffect of sphere diameter on the unsteady force, the latter theeffect of shock-wave Mach number.
3.1.1 Experiments of Sun et al. [40]
In the experiments of Sun et al. [40] and Tanno et al. [42],the unsteady force exerted on a sphere with diameter 8 cmwas measured for a shock wave with Ms = 1.22, p1 =101325 Pa, and T1 = 293.15 K. Simulations based on the axi-symmetric compressible Navier-Stokes equations for sphereswith diameters ranging from 8 µm to 8 mm were also carriedout by Sun et al. [40]. The Reynolds number based on par-ticle diameter and flow conditions behind the shock is 49for the smallest sphere and increases to 4.9 × 105 for thelargest sphere. Correspondingly, the Knudsen number var-ies from 9.4 × 10−3 to 9.4 × 10−7, justifying the contin-uum assumption in the simulations. Sun et al. found that thecomputations agreed very well with the experiments. For thelarger spheres, the experiments and computations showed abrief period of negative drag due to shock-wave focusing atthe rear of the sphere. For smaller spheres, negative drag wasnot observed because the viscous contribution becomes morepronounced.
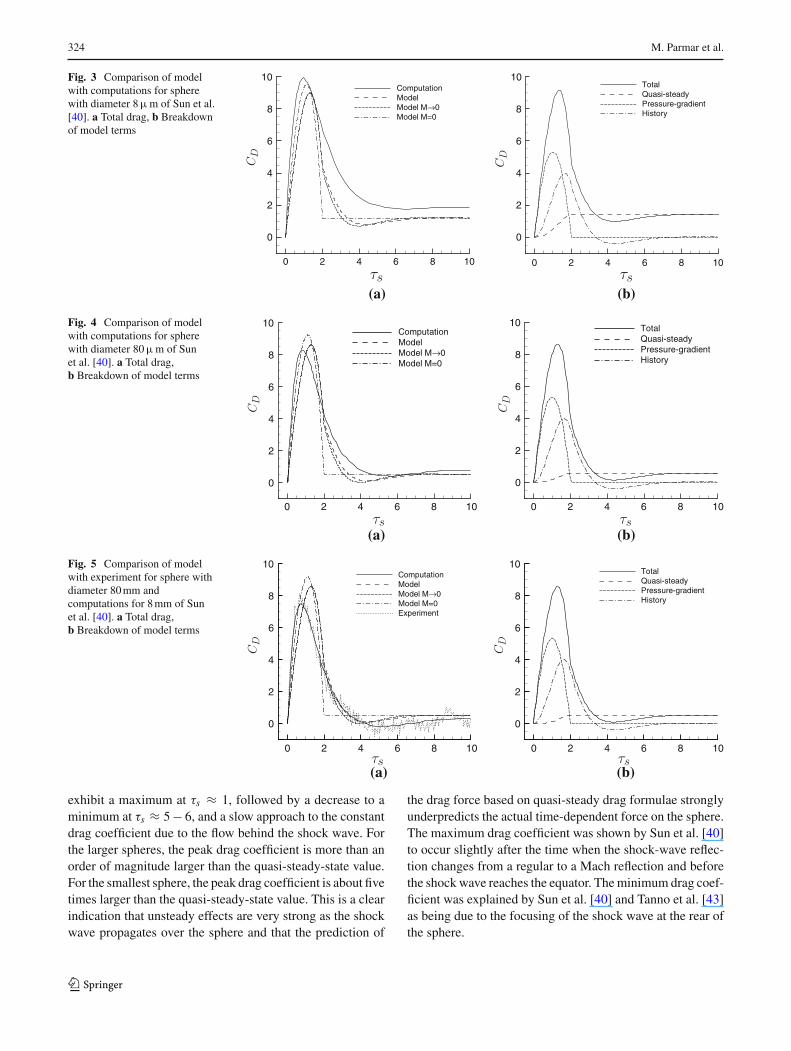
The unsteady drag coefficients computed by Sun et al.are presented in Figs. 3a, 4 and 5 for the diameters 8 µm,80 µm, and 8 mm. For the largest diameter, the experimen-tal result for 80 mm is also shown. The rapid increase of thedrag coefficient following the impact of the shock wave isimmediately apparent. The drag coefficient is observed to
123
324 M. Parmar et al.
Fig. 3 Comparison of modelwith computations for spherewith diameter 8 µm of Sun et al.[40]. a Total drag, b Breakdownof model terms
(a) (b)
Fig. 4 Comparison of modelwith computations for spherewith diameter 80 µm of Sunet al. [40]. a Total drag,b Breakdown of model terms
(a) (b)
Fig. 5 Comparison of modelwith experiment for sphere withdiameter 80 mm andcomputations for 8 mm of Sunet al. [40]. a Total drag,b Breakdown of model terms
(a) (b)
exhibit a maximum at τs ≈ 1, followed by a decrease to aminimum at τs ≈ 5 − 6, and a slow approach to the constantdrag coefficient due to the flow behind the shock wave. Forthe larger spheres, the peak drag coefficient is more than anorder of magnitude larger than the quasi-steady-state value.For the smallest sphere, the peak drag coefficient is about fivetimes larger than the quasi-steady-state value. This is a clearindication that unsteady effects are very strong as the shockwave propagates over the sphere and that the prediction of
the drag force based on quasi-steady drag formulae stronglyunderpredicts the actual time-dependent force on the sphere.The maximum drag coefficient was shown by Sun et al. [40]to occur slightly after the time when the shock-wave reflec-tion changes from a regular to a Mach reflection and beforethe shock wave reaches the equator. The minimum drag coef-ficient was explained by Sun et al. [40] and Tanno et al. [43]as being due to the focusing of the shock wave at the rear ofthe sphere.
123

Modeling of the unsteady force for shock–particle interaction 325
Also plotted in Figs. 3a, 4 and 5a are the predictions ofthe unsteady drag coefficient based on (5), (2), and (3) withthe finite-Mach-number kernels of Parmar et al. [29] (seeFig. 1b), the zero-Mach-number kernel of Longhorn [20](4), and the incompressible kernel (8). In the figure legends,these results are labeled by “Model”, “Model M → 0”,and “Model M = 0”, respectively. The overall agreementbetween the computations, experiments of Sun et al. [40],and the present model in terms of the order of magnitude ofthe maximum and minimum drag coefficients, the times atwhich they occur, and the approach to steady state is good.In fact, the agreement is better than expected given that thepresent model has been constructed based on data gatheredfrom homogeneous flows. The drag-coefficient minima pre-dicted by the present model are due to the negative values ofthe kernel shown in Fig. 1.
Closer investigation of the results presented in Figs. 3a,4 and 5a, reveals some discrepancies. First, we note that themodel overpredicts the peak drag coefficient for the sphereswith diameters 80 mm and 80 µm, but underpredicts the peakdrag coefficient for the sphere with diameter 8 µm. Thesetrends lead to slight over- and underprediction of the dragcoefficient for 1 � τs � 2. In particular, it is noteworthy thatwhile the agreement between the model and the computationsis quite good for 2 � τs � 5 for the diameters 80 mm and80 µm, the model underpredicts the computational resultsfor the diameter 8 µm. This underprediction is related to thenarrower peak and faster decay predicted by the model com-pared to that observed in the computations. It appears thatthere are also other sources for the discrepancy because thecomputation does not exhibit a pronounced minimum in thedrag coefficient.
The figures show clearly that with the present simplemodel of the ambient-flow acceleration “seen” by the parti-cle, even the results obtained with the incompressible kernelpredict reasonably well the large increase in the drag force asthe shock wave passes over the sphere. However, the invis-cid unsteady force predicted by the incompressible kernel iszero for τs > 2, because the ambient flow is then taken to bethe steady post-shock state, and hence the drag force is givenby the quasi-steady contribution only. The rapid rise of thedrag force and its non-monotonic decay over several acoustictime scales to the quasi-steady state observed in the measure-ments and are captured well by the compressible kernels. Inthe experiments of Sun et al. [40], the Mach number behindthe shock wave is quite low at M2 = 0.31 and therefore thedifference between the results predicted by the zero-Mach-number kernel of Longhorn [20] and the finite-Mach-numberkernel of Parmar et al. [29] is small. The peak drag coeffi-cients computed with these kernels are basically identical andlower than those predicted by the incompressible kernel. Thetime at which the peak drag coefficient occurs is predictedto be larger by the kernels of Longhorn [20] and Parmar
et al. [29] compared to that predicted by the incompressiblekernel. The primary difference between the drag-coefficientvariation obtained from the kernels of Longhorn [20] andParmar et al. [29] is that the latter show a slower decay ofthe drag coefficient and are closer to the computations andexperiments during that phase.
A breakdown of the terms in the model of Parmar et al.is shown in Figs. 3b, 4 and 5b. In the legends of these fig-ures, the label “History” denotes that part of the inviscidunsteady force given by the first term on the right-hand sideof (3). In the present model, the quasi-steady drag increasesmonotonically and is fully established at τs = 2. Becausethe pressure-gradient drag is zero for τs ≥ 2, the existenceof a negative drag force for a limited time is determined bythe relative magnitude of the quasi-steady drag and the min-imum value of the inviscid unsteady drag force. The viscousunsteady contribution has been ignored in the present model.As can be expected, its contribution is likely to be higher forthe smaller spheres and thus explains, at least partially, thelarger discrepancy seen for the smallest sphere of diameter8 µm and also the very slow decay in the computed dragcoefficient for τs > 10.
3.1.2 Experiments of Skews et al. [37]
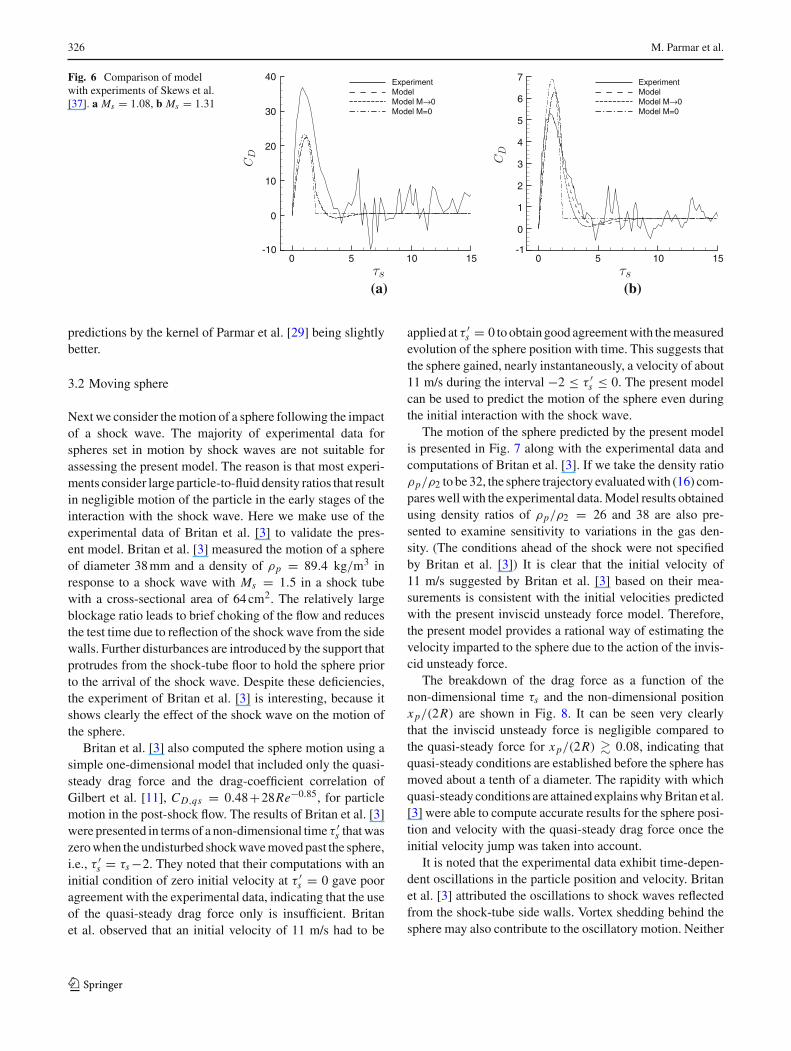
Skews et al. [37] measured the unsteady drag on a sphereof diameter 5 cm for shock waves with Ms = 1.08 and 1.31and p1 = 83,000 Pa and T1 = 293.15 K. The correspondingsphere Reynolds numbers varied from about 105 to 6 × 105
and the Mach numbers M2 of the post-shock flow varied from0.13 to 0.40.
The behavior of the drag force predicted by the presentmodel is compared to the measurements in Fig. 6. The largeoscillations in the measured force may be due to chaotic vor-tex shedding behind the sphere, which is relevant at the higherReynolds numbers considered here. The time-averaged meanvalue of the quasi-steady force on the sphere long time afterthe passage of the shock is reasonably well captured at bothMach numbers. The model captures the rapid increase anddecrease of the drag coefficient reasonably well. It is inter-esting that the peak is underpredicted for Ms = 1.08 andoverpredicted for Ms = 1.31. The difference, thus, cannotbe satisfactorily explained by the neglected viscous unsteadycontribution. The difficulty of measuring the unsteady force,associated uncertainties, and the shortcomings of the forcemodel perhaps contribute to the difference.
As with the results for the experiments of Sun et al. [40],the incompressible kernel overpredicts the peak drag coeffi-cient compared to the kernels of Longhorn [20] and Parmaret al. [29]. The differences between the results obtained withthe latter two kernels are restricted to the decay of the dragcoefficient and approach to the quasi-steady state, with the
123
326 M. Parmar et al.
Fig. 6 Comparison of modelwith experiments of Skews et al.[37]. a Ms = 1.08, b Ms = 1.31
(a) (b)
predictions by the kernel of Parmar et al. [29] being slightlybetter.
3.2 Moving sphere
Next we consider the motion of a sphere following the impactof a shock wave. The majority of experimental data forspheres set in motion by shock waves are not suitable forassessing the present model. The reason is that most experi-ments consider large particle-to-fluid density ratios that resultin negligible motion of the particle in the early stages of theinteraction with the shock wave. Here we make use of theexperimental data of Britan et al. [3] to validate the pres-ent model. Britan et al. [3] measured the motion of a sphereof diameter 38 mm and a density of ρp = 89.4 kg/m3 inresponse to a shock wave with Ms = 1.5 in a shock tubewith a cross-sectional area of 64 cm2. The relatively largeblockage ratio leads to brief choking of the flow and reducesthe test time due to reflection of the shock wave from the sidewalls. Further disturbances are introduced by the support thatprotrudes from the shock-tube floor to hold the sphere priorto the arrival of the shock wave. Despite these deficiencies,the experiment of Britan et al. [3] is interesting, because itshows clearly the effect of the shock wave on the motion ofthe sphere.
Britan et al. [3] also computed the sphere motion using asimple one-dimensional model that included only the quasi-steady drag force and the drag-coefficient correlation ofGilbert et al. [11], CD,qs = 0.48+28Re−0.85, for particlemotion in the post-shock flow. The results of Britan et al. [3]were presented in terms of a non-dimensional time τ ′
s that waszero when the undisturbed shock wave moved past the sphere,i.e., τ ′
s = τs −2. They noted that their computations with aninitial condition of zero initial velocity at τ ′
s = 0 gave pooragreement with the experimental data, indicating that the useof the quasi-steady drag force only is insufficient. Britanet al. observed that an initial velocity of 11 m/s had to be
applied at τ ′s = 0 to obtain good agreement with the measured
evolution of the sphere position with time. This suggests thatthe sphere gained, nearly instantaneously, a velocity of about11 m/s during the interval −2 ≤ τ ′
s ≤ 0. The present modelcan be used to predict the motion of the sphere even duringthe initial interaction with the shock wave.
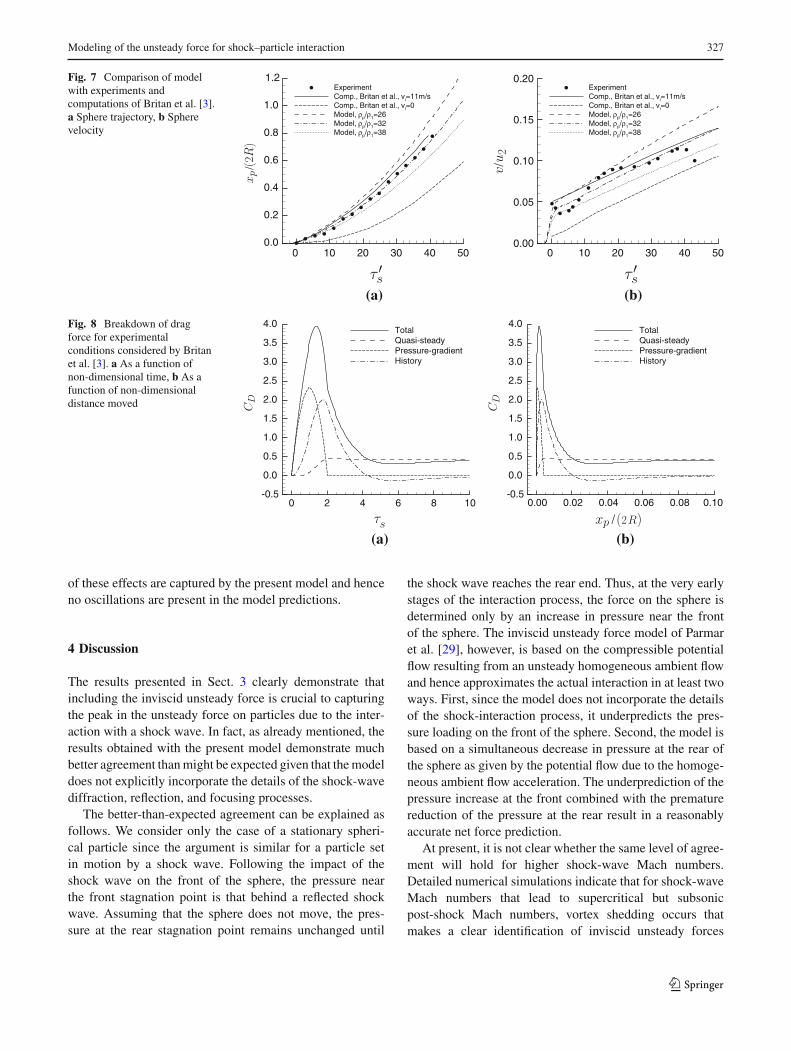
The motion of the sphere predicted by the present modelis presented in Fig. 7 along with the experimental data andcomputations of Britan et al. [3]. If we take the density ratioρp/ρ2 to be 32, the sphere trajectory evaluated with (16) com-pares well with the experimental data. Model results obtainedusing density ratios of ρp/ρ2 = 26 and 38 are also pre-sented to examine sensitivity to variations in the gas den-sity. (The conditions ahead of the shock were not specifiedby Britan et al. [3]) It is clear that the initial velocity of11 m/s suggested by Britan et al. [3] based on their mea-surements is consistent with the initial velocities predictedwith the present inviscid unsteady force model. Therefore,the present model provides a rational way of estimating thevelocity imparted to the sphere due to the action of the invis-cid unsteady force.
The breakdown of the drag force as a function of thenon-dimensional time τs and the non-dimensional positionx p/(2R) are shown in Fig. 8. It can be seen very clearlythat the inviscid unsteady force is negligible compared tothe quasi-steady force for x p/(2R) � 0.08, indicating thatquasi-steady conditions are established before the sphere hasmoved about a tenth of a diameter. The rapidity with whichquasi-steady conditions are attained explains why Britan et al.[3] were able to compute accurate results for the sphere posi-tion and velocity with the quasi-steady drag force once theinitial velocity jump was taken into account.
It is noted that the experimental data exhibit time-depen-dent oscillations in the particle position and velocity. Britanet al. [3] attributed the oscillations to shock waves reflectedfrom the shock-tube side walls. Vortex shedding behind thesphere may also contribute to the oscillatory motion. Neither
123
Modeling of the unsteady force for shock–particle interaction 327
Fig. 7 Comparison of modelwith experiments andcomputations of Britan et al. [3].a Sphere trajectory, b Spherevelocity
(a) (b)
Fig. 8 Breakdown of dragforce for experimentalconditions considered by Britanet al. [3]. a As a function ofnon-dimensional time, b As afunction of non-dimensionaldistance moved
(a) (b)
of these effects are captured by the present model and henceno oscillations are present in the model predictions.
4 Discussion
The results presented in Sect. 3 clearly demonstrate thatincluding the inviscid unsteady force is crucial to capturingthe peak in the unsteady force on particles due to the inter-action with a shock wave. In fact, as already mentioned, theresults obtained with the present model demonstrate muchbetter agreement than might be expected given that the modeldoes not explicitly incorporate the details of the shock-wavediffraction, reflection, and focusing processes.
The better-than-expected agreement can be explained asfollows. We consider only the case of a stationary spheri-cal particle since the argument is similar for a particle setin motion by a shock wave. Following the impact of theshock wave on the front of the sphere, the pressure nearthe front stagnation point is that behind a reflected shockwave. Assuming that the sphere does not move, the pres-sure at the rear stagnation point remains unchanged until
the shock wave reaches the rear end. Thus, at the very earlystages of the interaction process, the force on the sphere isdetermined only by an increase in pressure near the frontof the sphere. The inviscid unsteady force model of Parmaret al. [29], however, is based on the compressible potentialflow resulting from an unsteady homogeneous ambient flowand hence approximates the actual interaction in at least twoways. First, since the model does not incorporate the detailsof the shock-interaction process, it underpredicts the pres-sure loading on the front of the sphere. Second, the model isbased on a simultaneous decrease in pressure at the rear ofthe sphere as given by the potential flow due to the homoge-neous ambient flow acceleration. The underprediction of thepressure increase at the front combined with the prematurereduction of the pressure at the rear result in a reasonablyaccurate net force prediction.
At present, it is not clear whether the same level of agree-ment will hold for higher shock-wave Mach numbers.Detailed numerical simulations indicate that for shock-waveMach numbers that lead to supercritical but subsonicpost-shock Mach numbers, vortex shedding occurs thatmakes a clear identification of inviscid unsteady forces
123

328 M. Parmar et al.
Fig. 9 Results for shockinteraction with cylinder atMs = 1.22. a Comparison ofmodel and computation,b Breakdown of model terms
(a) (b)
difficult. Furthermore, simulations not reported on here showthat the inviscid unsteady force is negligible compared to thechange in the quasi-steady drag force at supersonic post-shock Mach numbers.
The local minimum of the drag coefficient before the slowapproach to the quasi-steady-state value was attributed byTanno et al. [42] to shock-wave focusing at the rear of thesphere. The local force minimum occurs after the undisturbedshock wave has left the sphere, i.e., for τs > 2. Therefore, atthe time of minimum force, the contribution of the pressure-gradient term is identically zero and the minimum is onlydetermined by the relative magnitude of the inviscid unsteadyand quasi-steady drag terms. It seems reasonable to assumethat the quasi-steady drag model is accurate, given that thelong-time behavior of the measured drag force is accuratelycaptured by the present model. Therefore, it can be concludedthat the present model for the inviscid unsteady drag force isreasonably effective in predicting the local minimum of thedrag coefficient, although the shock-focusing process is nottaken into account. This, in turn, suggests that the kernel andthe present model for the ambient-flow acceleration seen bythe particle are effective.
The present model can also be applied to predict the invis-cid unsteady force exerted by shock waves on other particlegeometries provided the appropriate inviscid force kernelsand a model for ambient flow acceleration seen by the par-ticle are developed. For the case of a cylinder subjected toa shock wave the results obtained with the present modelare compared with inviscid computations using the numer-ical method described in [12,13] in Fig. 9 for Ms = 1.22.As with the previously presented results for the sphere, theoverall agreement in terms of the peak value of the drag coef-ficient, the time at which the peak value is attained, and thelong-time behavior is good.
We close the discussion by outlining how the model pre-sented in this article could be applied to the numerical simu-lation of shock waves interacting with millions to billions of
particles. In such simulations, shock waves are usually cap-tured with shock-capturing schemes and hence smeared over2–5 cells. Thus, particles interact with regions in which thesolution varies rapidly, but over length scales muchlarger than the particle diameter. Within the framework ofthe Eulerian-Lagrangian point-particle approach, the forcedecomposition given by (1) can be used with the ambientfluid properties evaluated at the particle center, where thequasi-steady drag is evaluated from (2), and the inviscidunsteady force is evaluated from (3) using the kernel pre-sented in Fig. 1b. Simplified descriptions of the unsteadyforce, such as those based on the kernel by Longhorn [20],see (4), or the incompressible kernel are possible. The impactof the simplified descriptions on the unsteady drag coefficientwas discussed in Sects. 2.3 and 3.1, respectively. If the par-ticle diameter is comparable to or is larger than the widthof the shock wave, the approach outlined in Sect. 2.4 can beused.
Acknowledgments The authors gratefully acknowledge support bythe National Science Foundation under grant number EAR0609712.
References
1. Bagchi, P., Balachandar, S.: Inertial and viscous forces on a rigidsphere in straining flows at moderate Reynolds numbers. J. FluidMech. 481, 105–148 (2003)
2. Bredin, M.S., Skews, B.W.: Drag measurements in unsteady com-pressible flow. Part 1: an unsteady flow facility and stress wavebalance. R&D J. South Afr. Inst. Mech. Eng. 23, 3–12 (2007)
3. Britan, A., Elperin, T., Igra, O., Jiang, J.P.: Acceleration of a spherebehind planar shock-waves. Exp. Fluids 20(2), 84–90 (1995)
4. Bryson, A.E., Gross, R.W.F.: Diffraction of strong shocks by cones,cylinders and spheres. J. Fluid Mech. 10(1), 1–16 (1961)
5. Carrier, G.F.: Shock waves in a dusty gas. J. Fluid Mech. 4(4),376–382 (1958)
6. Chang, E.J., Maxey, M.R.: Unsteady-flow about a sphere at lowto moderate Reynolds-number. 2. accelerated motion. J. FluidMech. 303, 133–153 (1995)
123
Modeling of the unsteady force for shock–particle interaction 329
7. Clift, R., Gauvin, W.H.: The motion of particles in turbulent gasstreams. In: Proc. Chemeca ’70, vol. 1, pp. 14–28 (1970)
8. Devals, C., Jourdan, G., Estivalezes, J.L., Meshkov, E.E.,Houas, L.: Shock tube spherical particle accelerating study for dragcoefficient determination. Shock Waves 12(4), 325–331 (2003)
9. Eames, I., Hunt, J.C.R.: Forces on bodies moving unsteadily inrapidly compressed flows. J. Fluid Mech. 505, 349–364 (2004)
10. Gatignol, R.: The Faxén formulas for a rigid particle in anunsteady non-uniform stokes-flow. J. Mec. Theor. Appl. 2(2), 143–160 (1983)
11. Gilbert, M., Davis, L., Altman, D.: Velocity lag of particlesin linearly accelerated combustion gases. Jet Propulsion 25(1),26–30 (1955)
12. Haselbacher, A.: A WENO reconstruction algorithm for unstruc-tured grids based on explicit stencil construction. AIAA Paper2005-0879 (2005)
13. Haselbacher, A., Balachandar, S., Kieffer, S.W.: Open-endedshock tube flows: influence of pressure ratio and diaphragm posi-tion. AIAA J. 45(8), 1917–1929 (2007)
14. Igra, O., Takayama, K.: Shock-tube study of the drag coeffi-cient of a sphere in a nonstationary flow. Proc. R. Soc. Lond.A 442(1915), 231–247 (1993)
15. Ingebo, R.D.: Drag coefficient for droplets and solid spheres inclouds accelerated in air streams. NACA Tech. Note 3762 (1956)
16. Jourdan, G., Houas, L., Igra, O., Estivalezes, J.L., Devals, C.,Meshkov, E.E.: Drag coefficient of a sphere in a non-stationaryflow: new results. Proc. R. Soc. A 463(2088), 3323–3345 (2007)
17. Kriebel, A.R.: Analysis of normal shock waves in particle ladengas. J. Basic Eng. 84(4), 655–665 (1964)
18. Landau, L.D., Lifshitz, E.M.: Fluid Mechanics, 2nd edn. Butter-worth-Heinemann, London (1987)
19. Lock, G.D.: Experimental measurements in a dusty-gas shock-tube. Int. J. Multiphase Flow 20(1), 81–98 (1994)
20. Longhorn, A.L.: The unsteady, subsonic motion of a sphere in acompressible inviscid fluid. Q. J. Mech. Appl. Math. 5(1), 64–81(1952)
21. Loth, E.: Compressibility and rarefaction effects on drag of a spher-ical particle.. AIAA J. 46(9), 2219–2228 (2008)
22. Love, A.E.H.: Some illustrations of modes of decay of vibratorymotions. Proc. Lond. Math. Soc. 2, 88–113 (1905)
23. Magnaudet, J., Eames, I.: The motion of high-Reynolds-mum-ber bubbles in inhomogeneous flows. Annu. Rev. Fluid Mech. 32,659–708 (2000)
24. Maxey, M.R., Riley, J.J.: Equation of motion for a small rigidsphere in a nonuniform flow. Phys. Fluids 26(4), 883–889 (1983)
25. Mei, R.W.: Flow due to an oscillating sphere and an expressionfor unsteady drag on the sphere at finite Reynolds-number. J. FluidMech. 270, 133–174 (1994)
26. Mei, R.W., Adrian, R.J.: Flow past a sphere with an oscillation inthe free-stream velocity and unsteady drag at finite Reynolds-num-ber. J. Fluid Mech. 237, 323–341 (1992)
27. Miles, J.W.: On virtual mass and transient motion in subsonic com-pressible flow. Q. J. Mech. Appl. Math. 4(4), 388–400 (1951)
28. Mougin, G., Magnaudet, J.: The generalized Kirchhoff equationsand their application to the interaction between a rigid bodyand an arbitrary time-dependent viscous flow. Int. J. MultiphaseFlow. 28(11), 1837–1851 (2002)
29. Parmar, M., Haselbacher, A., Balachandar, S.: On the unsteadyinviscid force on cylinders and spheres in subcritical compressibleflow. Phil. Trans. R Soc. A 366(1873), 2161–2175 (2008)
30. Rodriguez, G., Grandeboeuf, P., Khelifi, M., Haas, J.F.: Drag coef-ficient measurement of spheres in a vertical shock tube and numer-ical simulation. In: Brun, R., Dumitrescu, L. (eds.) Shock Waves@ Marseille III, pp. 43–48. Springer, Heidelberg (1995)
31. Rudinger, G.: Some properties of shock relaxation in gas flowscarrying small particles. Phys. Fluids 7(5), 658–663 (1964)
32. Rudinger, G.: Effective drag coefficient for gas-particle flow inshock tubes. J. Basic Eng. 92(1), 165–172 (1970)
33. Rudinger, G.: Fundamentals of Gas-Particle Flow. Handbook ofPowder Technology, vol. 2. Elsevier Scientific Publishing Co.,Amsterdam (1980)
34. Schiller, L., Naumann, A.: Über die grundlegenden Kräfte beider Schwerkraftaufbereitung. Zeitschrift Des Vereines DeutscherIngenieure 77, 318–320 (1933)
35. Selberg, B.P., Nicholls, J.A.: Drag coefficient of small sphericalparticles. AIAA J 6(3), 401–408 (1968)
36. Shapiro, A.H.: The dynamics and thermodynamics of compressiblefluid flow. The Ronald Press Company, New York (1953)
37. Skews, B.W., Bredin, M.S., Efune, M.: Drag measurements inunsteady compressible flow. Part 2: shock wave loading of spheresand cones. R&D J. South Afr. Inst. Mech. Eng. 23, 13–19 (2007)
38. Sommerfeld, M.: The unsteadiness of shock-waves propagatingthrough gas-particle mixtures. Exp. Fluids 3(4), 197–206 (1985)
39. Soo, S.L.: Gas-dynamic processes involving suspended solids.AIChE J. 7(3), 384–391 (1961)
40. Sun, M., Saito, T., Takayama, K., Tanno, H.: Unsteady drag on asphere by shock wave loading. Shock Waves 14(1–2), 3–9 (2005)
41. Suzuki, T., Sakamura, Y., Igra, O., Adachi, T., Kobayashi, S.,Kotani, A., Funawatashi, Y.: Shock tube study of particles’ motionbehind a planar shock wave. Meas. Sci. Tech. 16(12), 2431–2436(2005)
42. Tanno, H., Itoh, K., Saito, T., Abe, A., Takayama, K.: Interactionof a shock with a sphere suspended in a vertical shock tube. ShockWaves 13(3), 191–200 (2003)
43. Tanno, H., Komuro, T., Takahashi, M., Takayama, K., Ojima, H.,Onaya, S.: Unsteady force measurement technique in shocktubes. Rev. Sci. Instrum. 75(2), 532–536 (2004)
44. Taylor, G.I.: The motion of a body in water when subjected to asudden impulse. In: Batchelor, G. (ed.) The Scientific Papers ofG.I. Taylor, vol. 3, pp. 306–308. The Cambridge University Press,New York (1942)
45. Wakaba, L., Balachandar, S.: On the added mass force atfinite Reynolds and acceleration numbers. Theor. Comput. FluidDyn. 21(2), 147–153 (2007)
123