
Estudio de potencialidades del territorio para la identificación ...
Upload
khangminh22Category
view
0download
0
Metodo para la identificacion dedireccion de movimiento a partir de
patrones espaciales en senales deelectromiografıa de alta
densidad(HD-EMG) en contraccionesvoluntarias dinamicas, aplicado a la
articulacion del hombro.
Lina Marıa Pena Salinas
Universidad El Bosque
Facultad de ingenierıa, Programa de Bioingenierıa
Bogota D.C., Colombia
2021


Metodo para la identificacion dedireccion de movimiento a partir de
patrones espaciales en senales deelectromiografıa de alta
densidad(HD-EMG) en contraccionesvoluntarias dinamicas, aplicado a la
articulacion del hombro.
Lina Marıa Pena Salinas
Trabajo de grado presentado como requisito parcial para optar al tıtulo de:
Bioingeniero(a)
Directores:
Jonathan Tarquino Gonzalez
Monica Marlene Rojas Martınez
Lınea de Investigacion:
Tecnologıa para la salud de entes biologicos
Grupo de Investigacion:
Osiris-Bioaxis
Universidad El Bosque
Facultad de ingenierıa, Programa de Bioingenierıa
Bogota D.C., Colombia
2021


v
Resumen
Por medio de la electromiografıa de alta densidad (HD-EMG) ha sido posible analizar la
distribucion espacial de la actividad muscular, lo cual ha demostrado ser un factor determi-
nante para el reconocimiento de patrones en movimientos estaticos y dinamicos. Debido a
esta hipotesis, en este estudio se exploraron registros HD-EMG en cuatro grupos musculares,
Bıceps, Pectoral, Trapecio y Trıceps, de la articulacion del hombro, de 8 sujetos sanos con
el fin de explorar descriptores espaciales para la clasificacion de seis movimientos dinami-
cos. Se construyeron los mapas de activacion calculando el valor de la raız cuadratica media
(RMS), la frecuencia mediana (MDNF) y la desviacion absoluta de la media (MNAD) para
cada canal de electromiografıa, determinando la informacion mutua en cada grupo muscular
por cada ciclo de movimiento entre los mapas de activacion. Se observo que la variable RMS
cumple un mejor ındice de correlacion y similitud frente a las demas variables. A partir de las
cuadrıculas de los mapas de activacion se realizo una segmentacion de la zona de activacion,
para cada grupo muscular, se obtuvo el centro de gravedad, el centroide (ambos con coor-
denadas en x y y), el valor de intensidad mediana y la orientacion. Por medio del algoritmo
de seleccion de caracterısticas(Relieff y mRMR) se evaluo la identificacion de movimientos
para cada paciente de forma individual analizando la totalidad del grupo de caracterısticas
(lınea base) vs la agrupacion de caracterısticas con mayor relevancia. Los resultados indican
que la agrupacion de caracterısticas mejora el desempeno de la clasificacion (Exactitud 96 %,
Sensibilidad 94 %, precision 95 %, F1-Score 95 %).
Palabras clave: HD-EMG, descriptores espaciales, reconocimiento de patrones.
Abstract
High-density electromyography (HD-EMG) has allowed the possibility to analyse the spatial
distribution of muscle activity, which has proven to be a determining factor for the recog-
nition of patterns in static and dynamic movements. Due to this hypothesis, in this study,
HD-EMG recordings were explored in four muscle groups, Biceps, Pectoral, Trapezium and
Triceps, of the shoulder joint, of 8 healthy subjects to explore spatial descriptors for the
classification of six dynamic movements. Activation maps were constructed by calculating
the root mean square (RMS) value, the median frequency (MDNF) and the absolute devia-
tion from the mean (MNAD) for each electromyography channel, determining the mutual
information in each muscle group for each movement cycle. It was observed that the RMS
variable has a better correlation and similarity index compared to the other variables. From
the grids of the activation maps, a segmentation of the activation zone was carried out, ex-
tracting for each muscle group, the gravity center, the centroid (both with coordinates in x
and y), the medium intensity value and orientation. Through the feature selection algorithm,

vi
the identification of movements was evaluated for each patient individually, analysing the
entire group of characteristics (baseline) vs the grouping of characteristics with greater re-
levance. The results indicate that the grouping of characteristics improves the classification
performance (Accuracy 96 %, Sensitivity 94 %, Precision 95 %, F1-Score 95 %).
Keywords: HD-EMG, spatial features, pattern Recognition.

vii
Introduccion
Las senales de electromiografıa (EMG) han sido integradas en los campos de terapias fısicas
por medio de dispositivos electromecanicos y sensoriales [Greising et al., 2016,Mantilla and
Santa, 2017], ya que han permitido ser una herramienta de apoyo a los rehabilitadores fısicos
y los pacientes [Jordanic et al., 2017a]. Por medio del procesamiento digital y reconocimiento
de patrones a traves de estas biosenales se establecen metodos de realimentacion que aportan
un proceso significativo en las terapias fısicas. Sin embargo, se ha evidenciado una deficien-
cia en la deteccion de direccion de movimiento [Farrell and ff Weir, 2008] y baja robustez
ante cambios de la disposicion de los electrodos [Scheme and Englehart, 2011]. Por lo tanto,
se ha implementado el uso de electromiografıa multicanal (HD-EMG) como tecnologıa que
dispone informacion fisiologica y topografica de la actividad muscular [Mills, 2005,Mondelli
et al., 2014]
Una de las ventajas de la electromiografıa multicanal es que permite observar detallamente el
proceso fisiologico de los musculos y las regiones musculares que son inervadas para cumplir
las tareas motora, indicando que existen propiedades de distribucion espacial [Rohrer et al.,
2006]. Por lo tanto, a partir del analisis de senales y procesamiento de informacion biologica
existen metodos para la identificacion de movimiento en senales de HD-EMG que permiten
asemejarse a los procesos naturales de movimiento [Jordanic, 2017]. Sin embargo, el porcen-
taje en la identificacion de direccion en tareas dinamicas no es suficiente para ser empleado
en sistemas de rehabilitacion robotica [Rojas-Martınez et al., 2017]. Por lo que se pretende
elaborar un metodo para la identificacion de la direccion del movimiento en contracciones
dinamicas, se tiene como prospectiva colaborar al rehabilitador fısico a traves de la rehabi-
litacion robotica a los pacientes para obtener una rehabilitacion integral, resaltando que el
metodo desarrollado en el presente proyecto esta enfocado en la articulacion del hombro, se
debe tener en cuenta que podrıa ser aplicable a otras zonas musculares; partiento del hecho
de que la compartimentacion muscular y fenomeno de activacion espacial se da en cualquier
musculo del cuerpo [Las Heras Campos, 2016].
Con base en lo anterior, en las senales EMG se han explorado tecnicas para la extraccion de
caracterısticas en a partir de metodos estadısticos en el dominio temporal y frecuencial [Ba-
rrios a et al., 2017]. El problema recae en la naturaleza de la contraccion muscular: si es
estacionaria existe una relacion lineal entre la amplitud y la fuerza, evidenciada en con-
tracciones isometricas; en el caso de las contracciones dinamicas no existe linealidad entre
amplitud de la senal y fuerza, dificultando el reconocimiento de direccion del movimien-
to [Rıos Garcıa, Marilia, Solıs de la Paz, Dayma, Oviedo Bravo, Ariel, Boza Santos, Ismael,
Valdes Gonzalez, 2013].

viii
El objetivo de este documento se enfoca en la exploracion de caracterısticas espaciales,
unicamente en movimientos dinamicos con el uso de mapas de activacion [Overeem et al.,
2008,Tucker et al., 2009]. Recientemente se han implementado caracterısticas de distribucion
espacial como el centro de gravedad, la intensidad muscular y variogramas, para la identi-
ficacion de la direccion de movimiento en tareas motoras dinamicas e isometricas [Farina
and Falla, 2008,Stango et al., 2015], resaltando que al usar en conjunto caracterısticas en el
dominio temporal, frecuencial y espacial se abarca de forma mas completa el funcionamien-
to fisiologico de las fibras musculares, siendo posible mejorar el rendimiento del modelo de
clasificacion y por ende identificar la direccion de movimiento [Jordanic, 2017].

Contenido
Resumen V
Introduccion VII
Lista de tablas XIII
Lista de figuras XV
Lista de ecuaciones XX
Abreviaturas XXI
1. Definicion del problema 1
2. Justificacion 3
3. Objetivos 5
4. Marco referencial 6
4.1. Marco Teorico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
4.1.1. Funcionamiento fisiologico de los musculos . . . . . . . . . . . . . . . 6
4.1.2. Fisiologıa y anatomıa del hombro . . . . . . . . . . . . . . . . . . . . 9
4.1.3. Registro de la actividad muscular(Electromiografıa(EMG)) . . . . . . 11
4.1.4. Electromiografıa multicanal(HD-EMG) . . . . . . . . . . . . . . . . . 12
4.1.5. Aplicaciones del registro muscular (Rehabilitacion robotica) . . . . . 13
4.1.6. Analisis y procesamiento del registro muscular . . . . . . . . . . . . . 14
4.1.7. Aprendizaje automatico . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.2. Marco legal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.3. Estado del arte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5. Metodologıa 26
5.1. Caracterizacion de la base de datos . . . . . . . . . . . . . . . . . . . . . . . 27
5.2. Pre-procesamiento de las senales HD-EMG . . . . . . . . . . . . . . . . . . . 30
5.2.1. Sincronizacion de las senales de los amplificadores . . . . . . . . . . . 30
5.2.2. Obtencion de marcaciones de desplazamiento y posicion . . . . . . . . 31
5.2.3. Diseno de filtro para las senales HD-EMG . . . . . . . . . . . . . . . 33

x Contenido
5.2.4. Atenuador adaptativo para la reduccion de ruido en 50 Hz y compo-
nentes armonicos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.2.5. Eliminacion de canales diferenciales e identificacion de artefactos . . . 39
5.3. Etapa I. Mapas de activacion . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5.3.1. Procesamiento de los mapas de activacion . . . . . . . . . . . . . . . 44
5.4. Etapa II. Extraccion de caracterısticas de los mapas de activacion . . . . . . 47
5.4.1. Centro de gravedad basado en intensidades del mapa de activacion . . 50
5.4.2. Centroide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.4.3. Orientacion de las zonas de activacion muscular . . . . . . . . . . . . 51
5.4.4. Intensidad mediana . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.4.5. Analisis de relevancia de caracterısticas . . . . . . . . . . . . . . . . . 52
5.5. Etapa III. Clasificacion de movimientos y seleccion de metodos de clasificacion 54
5.5.1. Experimento I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5.6. Etapa IV. Evaluacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.6.1. Experimento II: Pruebas de clasificacion descriptores Centro de grave-
dad e Intensidad mediana - lınea base de comparacion . . . . . . . . . 57
5.6.2. Experimento III: Pruebas de clasificacion Leave-One-Out(LOO) . . . 57
5.6.3. Experimento IV: Pruebas de clasificacion k-fold . . . . . . . . . . . . 58
6. Resultados y discusion 59
6.1. Etapa I. Mapas de activacion . . . . . . . . . . . . . . . . . . . . . . . . . . 59
6.2. Etapa II. Extraccion de caracterısticas de los mapas de activacion . . . . . . 65
6.2.1. Analisis de relevancia de caracterısticas . . . . . . . . . . . . . . . . . 65
6.3. Etapa III. Clasificacion de movimientos . . . . . . . . . . . . . . . . . . . . . 69
6.3.1. Experimento I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
6.4. Etapa IV. Evaluacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
6.4.1. Experimento II: Pruebas de clasificacion descriptores Centro de grave-
dad e Intensidad mediana - lınea base de comparacion . . . . . . . . . 72
6.4.2. Experimento III: Pruebas de clasificacion Leave-One-Out(LOO) . . . 75
6.4.3. Experimento IV: Pruebas de clasificacion k-fold . . . . . . . . . . . . 76
7. Conclusiones 79
8. Recomendaciones 80
A. Anexo I: Tablas de similitud de las variables empleadas en la construccion de
los mapas de activacion. 81
B. Anexo II: Seleccion de caracterısticas. 91
C. Anexo III: Resultados de metricas de evaluacion para 4 sujetos. 94

Contenido xi
D. Anexo IV: Resultados de clasificacion experimento III (validacion LOO). 96
Bibliografıa 98


Lista de Tablas
4-1. Caracterısticas que usualmente se extraen de senales bioelectricas . . . . . . 16
4-2. Cuadro comparativo de los metodos de clasificacion supervisados y no su-
pervisados [Cabarcas Barboza and Guerrero Castilla, 2007, Carrasco Henao,
2016,Jordanic, 2017] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
5-1. Electrodos empleados segun los musculos para cada sujeto. . . . . . . . . . . 30
5-2. Relacion senal-ruido(SNR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5-3. Atenuaciones para la frecuencia de 50Hz y sus componentes armonicos a partir
del parametro SNR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6-1. Porcentaje de datos agrupados para el analisis de similitud con Distancia
Euclidiana en un rango entre 0 a 0.5. . . . . . . . . . . . . . . . . . . . . . . 60
6-2. Metricas estadısticas para el analisis de similitud con Distancia Euclidiana. . 60
6-3. Porcentaje de datos agrupados para el analisis de similitud con el Coeficiente
de Correlacion de Pearson. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
6-4. Metricas estadısticas para el analisis de similitud con Coeficiente de Correla-
cion de Pearson. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
6-5. Porcentaje de datos agrupados para el analisis de similitud con la Distancia
entre Histogramas para una distancia menor a 0,5. . . . . . . . . . . . . . . . 62
6-6. Metricas estadısticas para el analisis de similitud con la Distancia entre His-
togramas para una distancia menor a 0,5. . . . . . . . . . . . . . . . . . . . . 63
6-7. Porcentaje de datos agrupados para el analisis de similitud con el Indice de
Similitud Estructural. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
6-8. Metricas estadısticas para el analisis de similitud con el Indice de Similitud
Estructural. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
6-9. Promedio de relevancia(Relieff) del grupo de 13 caracterısticas en 4 sujetos. . 67
6-10.Resultados de clasificacion de 6 movimientos dinamicos empleando caracterıti-
cas de Intensidad y centro de gravedad(CG) [Rojas-Martınez et al., 2017]. . . 72
6-11.Resultados de clasificacion metodologıa propuesta, identificacion de 6 movi-
mientos dinamicos empleando caracterıticas de Intensidad y centro de grave-
dad(CG) clasificador SVM kernel cuadratico. . . . . . . . . . . . . . . . . . . 73
6-12.Resultados de clasificacion metodologıa propuesta, identificacion de 6 movi-
mientos dinamicos empleando caracterısticas de Intensidad y centro de grave-
dad(CG) clasificador NN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74

xiv Lista de Tablas
6-13.Metricas de clasificacion a partir de la matriz de confusion en 6-9, por la meto-
dologıa propuesta y seleccion de caracterısticas, Centroide(C), Intensidad(M),
orientacion(O) y centro de gravedad(CG). Por medio de NN y LOO. . . . . . 74
6-14.Resultados de clasificacion primer y segundo diseno experimental LOO, clases
desbalanceadas y balanceadas. . . . . . . . . . . . . . . . . . . . . . . . . . . 76
6-15.Resultados de clasificacion diseno experimental validacion k-fold, clases ba-
lanceadas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
A-1. Porcentaje de datos agrupados para el analisis de similitud con Distancia
Euclidiana en un rango entre 0 a 0.5. . . . . . . . . . . . . . . . . . . . . . . 83
A-2. Porcentaje de datos agrupados para el analisis de similitud con Distancia
Euclidiana en un rango entre 0 a 0.5. . . . . . . . . . . . . . . . . . . . . . . 83
A-3. Metricas estadısticas para el analisis de similitud con Distancia Euclidiana. . 83
A-4. Porcentaje de datos agrupados para el analisis de similitud con Distancia
Euclidiana en un rango entre 0 a 0.5. . . . . . . . . . . . . . . . . . . . . . . 84
A-5. Metricas estadısticas para el analisis de similitud con Distancia Euclidiana. . 84
A-6. Porcentaje de datos agrupados para el analisis de similitud con Distancia
Euclidiana en un rango entre 0 a 0.5. . . . . . . . . . . . . . . . . . . . . . . 84
A-7. Metricas estadısticas para el analisis de similitud con Distancia Euclidiana. . 85
A-8. Porcentaje de datos agrupados para el analisis de similitud con el Coeficiente
de Correlacion de Pearson. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
A-9. Metricas estadısticas para el analisis de similitud con Coeficiente de Correla-
cion de Pearson. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
A-10.Porcentaje de datos agrupados para el analisis de similitud con el Coeficiente
de Correlacion de Pearson. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
A-11.Metricas estadısticas para el analisis de similitud con Coeficiente de Correla-
cion de Pearson. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
A-12.Metricas estadısticas para el analisis de similitud con Coeficiente de Correla-
cion de Pearson. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
A-13.Porcentaje de datos agrupados para el analisis de similitud con el Coeficiente
de Correlacion de Pearson. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
A-14.Porcentaje de datos agrupados para el analisis de similitud con la Distancia
entre Histogramas para una distancia menor a 0,5. . . . . . . . . . . . . . . . 87
A-15.Metricas estadısticas para el analisis de similitud con la Distancia entre His-
togramas para una distancia menor a 0,5. . . . . . . . . . . . . . . . . . . . . 87
A-16.Porcentaje de datos agrupados para el analisis de similitud con la Distancia
entre Histogramas para una distancia menor a 0,5. . . . . . . . . . . . . . . . 87
A-17.Metricas estadısticas para el analisis de similitud con la Distancia entre His-
togramas para una distancia menor a 0,5. . . . . . . . . . . . . . . . . . . . . 88

Lista de Tablas xv
A-18.Porcentaje de datos agrupados para el analisis de similitud con la Distancia
entre Histogramas para una distancia menor a 0,5. . . . . . . . . . . . . . . . 88
A-19.Metricas estadısticas para el analisis de similitud con la Distancia entre His-
togramas para una distancia menor a 0,5. . . . . . . . . . . . . . . . . . . . . 88
A-20.Porcentaje de datos agrupados para el analisis de similitud con el Indice de
Similitud Estructural. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
A-21.Metricas estadısticas para el analisis de similitud con el Indice de Similitud
Estructural. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
A-22.Metricas estadısticas para el analisis de similitud con el Indice de Similitud
Estructural. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
A-23.Metricas estadısticas para el analisis de similitud con el Indice de Similitud
Estructural. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
A-24.Porcentaje de datos agrupados para el analisis de similitud con el Indice de
Similitud Estructural. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
A-25.Metricas estadısticas para el analisis de similitud con el Indice de Similitud
Estructural. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
A-26.Porcentaje de datos agrupados para el analisis de similitud con el Indice de
Similitud Estructural. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
A-27.Metricas estadısticas para el analisis de similitud con el Indice de Similitud
Estructural. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90

Lista de Figuras
4-1. Composicion del musculo esqueletico. Adaptado de [Guyton and Hall, 2016] 6
4-2. Formacion de la unidad motora [Fox, 2014] . . . . . . . . . . . . . . . . . . . 7
4-3. Mecanismos de los potenciales de accion [Carrasco Henao, 2016] . . . . . . . 8
4-4. Contracciones musculares. a) Isometrica, b) Isotonicas. Adaptado de [Laın,
2012] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4-5. Distribucion espacial de la inervacion de las unidades motoras. Adaptado de
[Las Heras Campos, 2016] . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
4-6. Musculos que conforman la articulacion del hombro. Izquerda anterior, Dere-
cha posterior. Adaptado de [Bakhsh and Nicandri, 2018] . . . . . . . . . . . 10
4-7. Mecanica de los movimientos del hombro. Adaptado de [Herrmann, 2016] . . 10
4-8. Obtencion de los potenciales de accion de las motoneuronas a traves de EMG
de superficie [Nawab et al., 2010] . . . . . . . . . . . . . . . . . . . . . . . . 11
4-9. Senal electromiografica. a) Amplitud vs numero de muestras, valor medio o
valor DC de 3mV. b) Amplitud vs Frecuencia. Adaptado de [Duran Acevedo
and Jaimes Mogollon, 2013] . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4-10.Arreglo matricial de electrodos para la obtencion de senales de HD-EMG.
Adaptado de [Jordanic et al., 2017b] . . . . . . . . . . . . . . . . . . . . . . 13
4-11.Ejemplos de equipos roboticos para terapias de rehabilitacion. Izquierda tera-
pia robotica interactiva. Derecha protesis mioelectrica [Scheme and Englehart,
2011] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4-12.Mapas de activacion mioelectricos construidos con diferentes metodos. Izquier-
da, a traves del uso de RMS. Centro, a partir del uso del espectro de frecuencia
media [Arendt-Nielsen et al., 2008]. Derecha, aplicacion de caracterısticas es-
paciales para determinar la intensidad de la inervacion muscular [Farina and
Falla, 2008] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4-13.Configuracion de una red neuronal . . . . . . . . . . . . . . . . . . . . . . . 19
4-14.Ejemplo de clasificador LDA en ejercicio multiclase [Scheme and Englehart,
2011]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4-15.Representacion de metodo K vecinos proximos . . . . . . . . . . . . . . . . . 21
5-1. Diagrama de bloques metodologıa general . . . . . . . . . . . . . . . . . . . 26
5-2. Toma de datos de electromiografıa . . . . . . . . . . . . . . . . . . . . . . . . 27
5-3. Trayectorias predefinidas para la adquisicion de las senales de HD-EMG . . . 28

Lista de Figuras xvii
5-4. Marcador de posiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5-5. Desplazamiento en senales EMG . . . . . . . . . . . . . . . . . . . . . . . . . 29
5-6. Evidencia de desfase temporal entre las senales de sincronizacion provenientes
de amplificador 1 (senal azul) y 2 (senal roja) . . . . . . . . . . . . . . . . . 31
5-7. Proceso de filtrado en la senal de marcacion de inicio/ finalizacion de movi-
mientos dinamicos y etiquetado de posicion . . . . . . . . . . . . . . . . . . . 32
5-8. Funcionamiento de filtro de mediana movil, donde se tiene X como senal de
entrada, Y senal de salida y k el tamano de la ventana que recorre cada dato
en la senal de entrada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5-9. Espectro de potencia para un canal EMG. Superior izquierda senal EMG
original. Superior derecha respuesta a filtro Butterworth. Inferior izquierda
Filtro elıptico. Inferior derecha Filtro Chebyshev. . . . . . . . . . . . . . . . 35
5-10.Configuracion del filtro Butterworth. Superior, respuesta en magnitud(dB).
Inferior, respuesta en fase(radianes). . . . . . . . . . . . . . . . . . . . . . . . 37
5-11.Identificacion de los componentes de red para 50 Hz y sus armonicos. . . . . 37
5-12.Atenuacion de los componentes de red para 50Hz a partir de la implementacion
del algoritmo adaptativo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5-13.Visualizacion de canales en una matriz de electrodos con una resolucion de
6× 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5-14.Visualizacion de senal con canales artefactos. . . . . . . . . . . . . . . . . . . 40
5-15.Representacion de matriz con canales artefactos y umbralizacion de filtro
Hampel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5-16.Proceso de construccion de los mapas de activacion muscular, a partir de la
senal HD-EMG. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5-17.Triangulacion cubica basada en triangulos. Adaptado de [Alonazi et al., 2018]. 45
5-18.Visualizacion del procesamiento de los mapas de activacion. a)Mapa de ac-
tivacion con canal diferencial, b) Identificacion de artefactos, c)Interpolacion
por triangulacion cubica de los artefactos, d) mapa de activacion filtrado en
escala logarıtmica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5-19.Superficie de los mapas de activacion. a) Visualizacion de canal diferencial(amplitud
alta), b)Superficie con presencia de artefacto, c) interpolacion de la superficie,
d) Filtrado de superficie y transformacion a escala logarıtmica. . . . . . . . . 47
5-20.Movimientos seleccionados para la extraccion de caracterısticas. . . . . . . . 48
5-21.Mapas de activacion para las seis direcciones de movimiento en musculo tra-
pecio, del centro a Derecha, Izquierda, Diagonal superior derecha, Diagonal
inferior izquierda, adelante y atras. . . . . . . . . . . . . . . . . . . . . . . . 49
5-22.Segmentacion del area de activacion para la extraccion de caracterısticas es-
paciales. Centroide(C) y centro de gravedad(CG). . . . . . . . . . . . . . . . 50
5-23.Ejemplificacion de orientacion. Para este caso, la orientacion indica 93 grados
de inclinacion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51

xviii Lista de Figuras
5-24.Ejemplificacion de pıxel de intensidad mediana vs pıxel de intensidad maxima. 52
5-25.Metodo para el analisis de caracterısticas relevantes. . . . . . . . . . . . . . . 53
5-26.Demostracion de movimientos de desplazamiento hacia 1(c1) en trayectoria
indicada para cada sujeto durante el registro de senales HD-EMG. . . . . . . 55
5-27.Matriz de confusion multiclase, ejemplo para clase 1(c1). . . . . . . . . . . . 55
5-28.Observaciones por clase. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
6-1. Tabla de similitud de imagenes con ventana de 400, valor RMS, En Bıceps y
movimiento 11. Resultados para la correlacion de Pearson. . . . . . . . . . . 59
6-2. Dataset de imagenes de los mapas de activacion. Se pueden apreciar diferentes
zonas de activacion para los diferentes musculos durante el mismo movimien-
to; movimiento 1. Evidentemente se observan diferencias entre las zonas de
activacion muscular. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
6-3. Analisis Mınima Redundancia Maxima Relevancia(mRMR) sujeto 1. . . . . . 66
6-4. Analisis mRMR para sujeto 5. . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6-5. Diagrama Boxplot para caracterısticas con alto rango de relevancia, a) Centro
de gravedad trapecio y, b) Centroide trapecio y, c) Orientacion trıceps y d)
Intensidad mediana Bıceps. . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
6-6. Diagrama de Dispersion espacio de tres caracterısticas. . . . . . . . . . . . . 69
6-7. Sensibilidad promedio para clasificadores LDA, KNN, SVM Cuadratica, SMV
RBF y NN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
6-8. Reporte de la metrica de F1-Score variando los nodos de la red neuronal(NN)
con Sujeto 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
6-9. Matriz de confusion clasificacion de 6 movimientos dinamicos despues de se-
leccion de caracterısticas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
6-10.Matrices de confusion NN validacion cruzada 6K-Fold. . . . . . . . . . . . . 77
A-1. Tabla de similitud de imagenes con ventana de 512, valor RMS, En Bıceps y
movimiento 11. Resultados para el ındice de distancia euclidiana. . . . . . . 81
A-2. Tabla de similitud de imagenes con ventana de 400, valor RMS, En Bıceps y
movimiento 11. Resultados para la correlacion de Pearson. . . . . . . . . . . 82
A-3. Tabla de similitud de imagenes con ventana de 400, valor MNAD, En Trapecio
y movimiento 4. Resultados para el ındice dedistancia entre Histogramas. . . 82
A-4. Tabla de similitud de imagenes con ventana de 512, valor MNAD, En Trıcpes
y movimiento 15. Resultados para el ındice de similitud estructural. . . . . . 82
B-1. Analisis Relieff Sujeto 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
B-2. Analisis Relieff Sujeto 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
B-3. Analisis Relieff Sujeto 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
B-4. Analisis Relieff Sujeto 4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93

Lista de Figuras xix
C-1. Resultados de metricas de evaluacion para cuatro sujetos empleando 24 ca-
racterısticas de los mapas de activacion. . . . . . . . . . . . . . . . . . . . . 94
C-2. Resultados de metricas de evaluacion para cuatro sujetos despues de la reduc-
cion y seleccion de caracterısticas de los mapas de activacion. . . . . . . . . . 95
D-1. Matrices de confusion clasificacion 8 sujetos, Red neuronal, observaciones por
clase desbalanceadas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
D-2. Matrices de confusion clasificacion 8 sujetos, Red neuronal, observaciones por
clase balanceadas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97

Lista de ecuaciones
Ecuaciones
5-1 Coeficiente de correlacion
5-2 Indice Signal-to-Noise-Ratio
5-3 Distancia euclidiana
5-4 Correlacion de Pearson
5-5 Distancia entre histogramas
5-6 Indice de similitud estructural
5-7 Centro de gravedad
5-8 Analisis Relieff
5-9 Prueba de Mınima Redundancia y Maxima relevancia
5-10 Sensibilidad
5-11 Precision
5-12 Exactitud
5-13 F1-Score
Abreviaturas
Abreviaturas
Abreviatura Termino
BD Base de datos
C Centroide
CG Centro de gravedad
EMG Electromiogtrafıa de superficie
FN Falsos negativos
FP Falsos positivos
HD − EMG Electromiogtrafıa multicanal
Hz Hertz
Ilog Intensidad media para de activacion
k −NN k vecinos proximos
LDA Analisis lineal discriminante
MDF Frecuencia mediana
MNF Frecuancia media
NN Redes neuronales
OM Orientacion en mapa de activacion
RBF Funcion de Base Radial
RMS Valor cuadratico medio
SSIM Indice de similitud estructural
SNR Relacion ruido−senal
STD Desviacion estandar
SVM Maquinas de soporte vectorial
V N Verdaderos negativos
V P Verdaderos positivos

1. Definicion del problema
Se estima que el 15 % de la poblacion mundial se encuentra en algun estado de discapaci-
dad [Chan and Zoellick, 2011], donde 28 de cada 100.000 habitantes padecen enfermedades
neuromusculares [Garces et al., 2016]. En America Latina se reporta que el 10 % de la pobla-
cion total padece algun tipo de discapacidad, cifra que en Colombia esta representada por
mas del 6.4 % de sus habitantes [Hincapie Agudelo et al., 2013]. Dentro de dicha estimacion,
el 43.6 % presenta una limitacion referente a extremidades y movilidad [Vazquez B. and
Caceres, 2008], precisando atencion medica y un proceso de rehabilitacion [Greising et al.,
2016].
Habitualmente la rehabilitacion muscular se realiza a traves de terapias fısicas, y de forma
integral a traves de herramientas como robots o exoesqueletos [Greising et al., 2016,Mantilla
and Santa, 2017], los cuales apoyan la rehabilitacion pasiva y activa mediante dispositivos
electromecanicos y sensoriales [Ayala Lozano et al., 2015], buscando recuperar fuerza y tono
muscular en las extremidades, ademas de estimular la formacion de nuevas sinapsis y el
reaprendizaje motor [Newport, 2006,Sebastian et al., 2017]. Estos dispositivos de asistencia
y rehabilitacion pueden emplear senales biologicas como metodo de realimentacion, en donde
la electromiografıa bipolar(EMG) se considera como una de las mas recurrentes. Sin embar-
go, estas senales EMG han demostrado ser insuficientes para el control de los dispositivos
mencionados anteriormente, pues han evidenciado deficiencias en la deteccion de direccion
de movimiento [Farrell and ff Weir, 2008] y baja robustez ante cambios de la disposicion de
los electrodos [Scheme and Englehart, 2011].
Una alternativa es el uso de la electromiografıa multicanal(HD-EMG), la cual permite la
obtencion de senales musculares por medio de arreglos matriciales de sensores, disminuyen-
do el error causado por el desplazamiento de los electrodos con respecto a la electromiografıa
convencional [Kraus et al., 2018]. Ademas de la anterior ventaja, el uso de senales HD-EMG
ha demostrado mejorar la distincion en patrones de movimientos musculares isometricos [Pan
et al., 2015,Phinyomark and Scheme, 2018], pero no ocurre del mismo modo en contracciones
dinamicas, donde el rendimiento no ha sido idoneo para el control de dispositivos roboticos
de rehabilitacion [Merletti et al., 2008] limitando su uso en pacientes y restringiendo sus
posibles aplicaciones para el mejoramiento de la calidad de vida en sujetos afectados con
limitaciones neuromusculares [Rojas-Martınez et al., 2012].

2 1 Definicion del problema
Esta desventaja en la deteccion de patrones de movimiento en contracciones dinamicas se
debe, en parte al hecho de que las caracterısticas de las senales de EMG comunmente se
extraen del dominio temporal y frecuencial, desconociendo que la activacion muscular tam-
bien posee un componente fisiologico en el dominio espacial [Dick F. et al., 2012]. Por tal
razon, el uso senales HD-EMG ha mostrado ser un metodo efectivo para la obtencion de
patrones espaciales en la activacion muscular [Jordanic et al., 2017b, Stango et al., 2015].
Aunque existen estudios recientes que evidencian una mejora en el reconocimiento de direc-
cionalidad en movimientos dinamicos en senales HD-EMG, las metodologıas propuestas no
resultan aceptables para su aplicacion en rehabilitacion asistida por dispositivos controla-
dos con senales EMG [Rojas-Martınez et al., 2017]. Por lo tanto, es necesario plantear un
metodo para la extraccion de nuevas caracterısticas espaciales en mapas de activacion mus-
cular que potencialicen la deteccion de direccion en movimientos dinamicos [Jordanic et al.,
2017a,Rojas-Martınez et al., 2012].
Pregunta(s) de investigacion
¿Es posible extraer nuevos descriptores espaciales que permiten caracterizar la direccion de
movimiento en contracciones dinamicas a partir de senales de HD-EMG?
Hipotesis
Existen nuevos descriptores espaciales que caracterizan la direccion de movimiento en con-
tracciones dinamicas a partir de senales de HD-EMG.

2. Justificacion
En el contexto colombiano, el panorama de la rehabilitacion reporta que por cada 100 perso-
nas que acuden al sistema de salud el 68.91 % de los pacientes son remitidos a terapias fısicas
y rehabilitacion, dentro de los cuales la gran mayorıa no percibe una recuperacion despues
de haber realizado el proceso [Mondragon and Saravia, 2013]. La rehabilitacion normalmen-
te requiere tiempo debido a la repetitividad de los ejercicios requeridos para disminuir el
deterioro muscular. Es por esto que desde el siglo XXI el uso de la rehabilitacion robotica
ha sido una herramienta tanto para los fisioterapeutas como para los pacientes [Stephenson
and Stephens, 2018], permitiendo ser un proceso que disminuye el tiempo por terapia e in-
crementa la independencia en personas discapacitadas para realizar tareas funcionales.
Aunque el registro y procesamiento de senales de EMG se emplea en dispositivos de reha-
bilitacion robotica [Duran Acevedo and Jaimes Mogollon, 2013], existen limitaciones debido
a que usualmente los enfoques de este procesamiento estan ligados en mayor porcentaje al
analisis temporal y frecuencial, ignorando en cierta medida el proceso fisiologico del cuer-
po, en el cual diferentes regiones musculares son inervadas a la vez para cumplir la tarea
motora, indicando que existen propiedades de distribucion espacial [Rohrer et al., 2006], las
cuales se pueden obtener a partir de senales de HD-EMG [Gallina et al., 2013], siendo uno
de los aspectos mas importantes en los dispositivos roboticos para la rehabilitacion, con la
finalidad de asemejarse lo mas posible a los procesos naturales de movimiento [Aguirre and
Balza, 2015].
Retomando lo anterior, el analisis temporal y frecuencial resulta insuficiente para la tarea de
identificacion de movimientos dinamicos [Jordanic et al., 2017b], lo que dificulta la ejecucion
de las tareas con naturalidad en terapias asistidas por robot [Romo et al., 2007]. Por lo tanto,
se han realizado estudios con la implementacion de caracterısticas en el dominio espacial con
la finalidad de clasificar movimientos de extremidades superiores [Palacio et al., 2013] em-
pleando HD-EMG [Kraus et al., 2018], lo cual ha indicado una mejora significativa aportando
confiabilidad en el reconocimiento de patrones de la activacion muscular [Stango et al., 2015].
Por lo tanto, a partir del analisis de senales y procesamiento de informacion biologica existen
metodos para la identificacion de movimiento en senales de EMG. Sin embargo, el porcen-
taje en la identificacion de direccion en tareas dinamicas no es suficiente para ser empleado
en sistemas de rehabilitacion robotica. Se tiene como prospectiva colaborar al rehabilitador
fısico a traves de la rehabilitacion robotica a los pacientes para obtener una rehabilitacion

4 2 Justificacion
integral, resaltando que, si bien el metodo desarrollado en el presente proyecto esta enfo-
cado en la articulacion del hombro, es importante recalcar que podria ser aplicable a otras
zonas musculares; partiento del hecho de que la compartimentacion muscular y fenomeno
de activacion espacial se lleva a cabo en cualquier musculo del cuerpo [Las Heras Campos,
2016]. Teniendo en cuenta lo anterior, se propone desarrollar un metodo de procesamiento
de senales de HD-EMG capaz de interpretar de forma natural procesos biologicos y que se
ajusten a los requerimientos de los organismos vivos por medio de la exploracion y analisis de
caracterısticas espaciales con la finalidad de potencializar su aplicacion en aspectos clınicos
de rehabilitacion, solucion que se relaciona directamente con el enfoque de tecnologicas para
la salud de entes biologicos en bioingenierıa.

3. Objetivos
Como objetivo general se plantea desarrollar una metodologıa para la identificacion de seis
direcciones de movimiento utilizando nuevas caracterısticas espaciales de senales de HD-EMG
en contracciones dinamicas y como objetivos especıficos:
Obtener mapas de activacion muscular a partir de senales HD-EMG en contracciones
dinamicas del hombro.
Determinar un conjunto de caracterısticas de los mapas de activacion asociadas a la
identificacion de la direccion de movimiento.
Implementar un modelo de reconocimiento de patrones para identificar la direccion
de movimiento a partir de las caracterısticas extraıdas de las senales de HD-EMG en
hombro.
Evaluar el metodo de identificacion automatica de direccion de movimiento en con-
tracciones dinamicas de hombro.

4. Marco referencial
4.1. Marco Teorico
4.1.1. Funcionamiento fisiologico de los musculos
Los musculos de los seres humanos estan compuestos por celulas denominadas fibras, las
cuales se clasifican segun su funcion y estructura en: musculo cardıaco (bombeo de sangre),
musculo liso (movilizacion de alimentos) y musculo esqueletico(desplazamiento) [Michael
and Sircar, 2012]. El musculo esqueletico, como se observa en la figura 4-1, esta conformado
por fascıculos formados por fibras musculares, que a su vez consta de multiples miofibrillas
rodeadas por el sarcomero, una membrana plasmatica en donde se disponen las proteınas
encargadas de la contraccion, conocidas como la miosina y la actina, organizadas en miofi-
lamentos gruesos y delgados, respectivamente [Fox, 2014].
Figura 4-1.: Composicion del musculo esqueletico. Adaptado de [Guyton and Hall, 2016]

4.1 Marco Teorico 7
Las fibras musculares tienen la capacidad de transmitir potenciales electricos generados en la
union neuromuscular como se ilustra en la figura 4-2, el impulso comienza con la activacion
del sistema nervioso central [Ortiz Corredor et al., 2016] continuando en las terminaciones
axonicas de las neuronas motoras hasta las fibras del musculo, accion en donde el musculo
esqueletico es inervado y se lleva a cabo una contraccion [Guyton and Hall, 2016,Fox, 2014].
Segun lo anterior el musculo esqueletico consta de una unidad estructural y funcional que se
conoce como la unidad motora que es un conjunto de fibras musculares mas la motoneurona
que la inerva [Michael and Sircar, 2012]. El tejido muscular esta fijado a los huesos y permite
realizar movimientos gruesos y finos en las extremidades [Fox, 2014].
Figura 4-2.: Formacion de la unidad motora [Fox, 2014]
Los movimientos musculares dependen de ciertos factores, entre los cuales esta la ley de todo
o nada, en donde una contraccion ocurre si el estımulo es superior al umbral de activacion,
de lo contrario no sucede [Guyton and Hall, 2016]. Otro factor es la cantidad de unidades
motoras que se activan y la frecuencia de los estımulos en las fibras musculares, lo que genera
una variacion de fuerza durante la contraccion [Las Heras Campos, 2016]. Por ejemplo, los
musculos oculares requieren un control fino de fuerza, es por esto que una neurona motora
es capaz de activar en promedio 23 fibras musculares, mientras que en el musculo gemelo
una sola neurona motora activa hasta 1000 fibras musculares. Teniendo en cuenta que las
celulas que componen las unidades motoras no van a tener el mismo tamano [Fox, 2014],
debido a que existe una activacion secuencial siendo las de menor tamano las primeras en
reclutarse, seguidas de las de mayor tamano y ası sucesivamente dependiendo de la fuerza
requerida [Parodi Feye, 2017].
Durante la activacion del musculo esqueletico, se llevan a cabo procesos electricos y mecani-
cos. En el proceso electrico ocurre un intercambio de iones en la celula, en donde las fibras
que se encuentran en un potencial de reposo a partir de procesos bioquımicos se despolarizan
transformandolo en un potencial de accion(PA), ilustrado en la figura 4-3 [Carrasco Henao,
2016]. En la membrana celular el espacio intracelular tiene una concentracion diferente al
espacio extracelular, la carga en reposo tiene un valor de -70 mili Voltios(mV). Debido a un

8 4 Marco referencial
proceso de despolarizacion se origina una diferencia de potencial electrico, si se supera el
umbral (-65mV a -50mV) ocurre un potencial de accion. El potencial de accion es seguido
por una repolarizacion, en el cual la membrana retorna lentamente al reposo. Aunque hay un
breve perıodo de disminucion de la excitabilidad denominado hiperpolarizacion para final-
mente llegar al equilibrio. Los potenciales de accion son impulsos nerviosos que se transmiten
desde los axones de las motoneuronas a las celulas musculares [Gila et al., 2009, Fernandez
Martınez, 2017].
Figura 4-3.: Mecanismos de los potenciales de accion [Carrasco Henao, 2016]
Por otro lado, el proceso mecanico consiste en el accionamiento de los musculos para el
movimiento de cargas, en donde se produce una contraccion isometrica o isotonica voluntaria,
como se observa en la figura 4-5 [Laın, 2012]. La contraccion dinamica isotonica consiste en
modificar la longitud del musculo, manteniendo un tono o tension muscular constante; dentro
de estas contracciones se encuentran las concentricas, en donde los musculos se contraen, y las
excentricas, accion que permite que los musculos aumenten su longitud. Como contraparte
estan las contracciones isometricas o estaticas, en las cuales la longitud muscular es constante
o el desplazamiento de las fibras es mınimo, pero se modifica la tension [Ortiz Corredor et al.,
2016].
Figura 4-4.: Contracciones musculares. a) Isometrica, b) Isotonicas. Adaptado de [Laın,
2012]
4.1 Marco Teorico 9
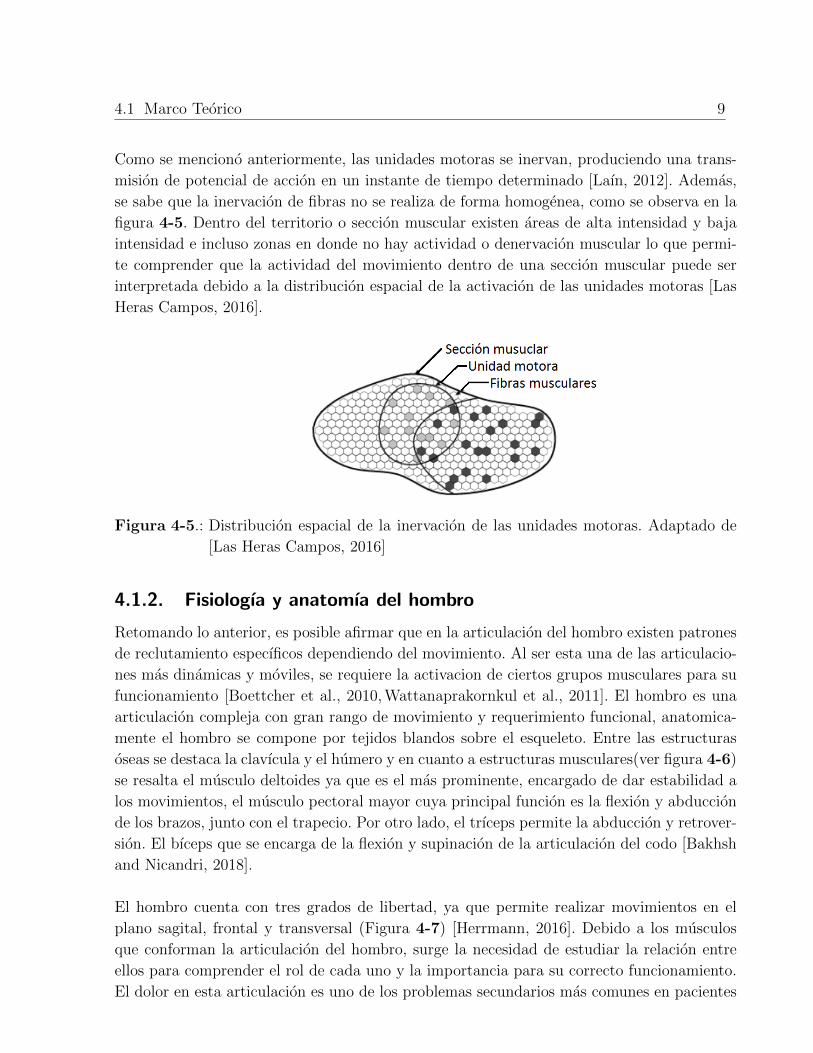
Como se menciono anteriormente, las unidades motoras se inervan, produciendo una trans-
mision de potencial de accion en un instante de tiempo determinado [Laın, 2012]. Ademas,
se sabe que la inervacion de fibras no se realiza de forma homogenea, como se observa en la
figura 4-5. Dentro del territorio o seccion muscular existen areas de alta intensidad y baja
intensidad e incluso zonas en donde no hay actividad o denervacion muscular lo que permi-
te comprender que la actividad del movimiento dentro de una seccion muscular puede ser
interpretada debido a la distribucion espacial de la activacion de las unidades motoras [Las
Heras Campos, 2016].
Figura 4-5.: Distribucion espacial de la inervacion de las unidades motoras. Adaptado de
[Las Heras Campos, 2016]
4.1.2. Fisiologıa y anatomıa del hombro
Retomando lo anterior, es posible afirmar que en la articulacion del hombro existen patrones
de reclutamiento especıficos dependiendo del movimiento. Al ser esta una de las articulacio-
nes mas dinamicas y moviles, se requiere la activacion de ciertos grupos musculares para su
funcionamiento [Boettcher et al., 2010, Wattanaprakornkul et al., 2011]. El hombro es una
articulacion compleja con gran rango de movimiento y requerimiento funcional, anatomica-
mente el hombro se compone por tejidos blandos sobre el esqueleto. Entre las estructuras
oseas se destaca la clavıcula y el humero y en cuanto a estructuras musculares(ver figura 4-6)
se resalta el musculo deltoides ya que es el mas prominente, encargado de dar estabilidad a
los movimientos, el musculo pectoral mayor cuya principal funcion es la flexion y abduccion
de los brazos, junto con el trapecio. Por otro lado, el trıceps permite la abduccion y retrover-
sion. El bıceps que se encarga de la flexion y supinacion de la articulacion del codo [Bakhsh
and Nicandri, 2018].
El hombro cuenta con tres grados de libertad, ya que permite realizar movimientos en el
plano sagital, frontal y transversal (Figura 4-7) [Herrmann, 2016]. Debido a los musculos
que conforman la articulacion del hombro, surge la necesidad de estudiar la relacion entre
ellos para comprender el rol de cada uno y la importancia para su correcto funcionamiento.
El dolor en esta articulacion es uno de los problemas secundarios mas comunes en pacientes

10 4 Marco referencial
Figura 4-6.: Musculos que conforman la articulacion del hombro. Izquerda anterior, Derecha
posterior. Adaptado de [Bakhsh and Nicandri, 2018]
con lesiones en la medula espinal, lo que dificulta la calidad de vida [Middaugh et al., 2013].
Sin embargo, a traves de la EMG se presentan diversos estudios que permiten comprender el
reclutamiento muscular, con el fin de establecer el patron de activacion [Wattanaprakornkul
et al., 2011].
Figura 4-7.: Mecanica de los movimientos del hombro. Adaptado de [Herrmann, 2016]

4.1 Marco Teorico 11
4.1.3. Registro de la actividad muscular(Electromiografıa(EMG))
Debido al interes en el estudio de las senales bioelectricas musculares, surge la necesidad
de comprender la actividad muscular, dando paso a que en 1889 se definiera el electrodo
concentrico, herramienta que le permitirıa al medico Charles S. Sherrington establecer por
primera vez el concepto de unidad motora a finales del siglo XX y los anos 50 [Gila et al.,
2009], en donde los potenciales de accion de dichas unidades motoras tendrıan la propiedad
de poder cuantificarse, permitiendo el registro de la senal muscular, tecnologıa que se deno-
minarıa electromiografıa(EMG), como se ilustra en la figura 4-8. Adicionalmente, por medio
de bases electronicas y tecnologicas durante los anos 30 a 50 se consolido la EMG digital en
1973, la cual permitirıa el almacenamiento de la senal [Reaz et al., 2006].
Figura 4-8.: Obtencion de los potenciales de accion de las motoneuronas a traves de EMG
de superficie [Nawab et al., 2010]
Para poder registrar los potenciales de accion de las unidades motoras se emplean sen-
sores denominados electrodos, los cuales pueden ser intramusculares(iEMG) o superficia-
les(sEMG) [Barrios a et al., 2017]. La finalidad de la EMG es poder medir la contraccion
muscular, encontrandose en los siguientes estados: estacionario, cuando en general la con-
traccion muscular es sostenida y, dinamico, donde la contraccion muscular varıa para la
realizacion de un movimiento [Romo et al., 2007]. A partir del uso de electrodos se pudie-
ron evidenciar caracterısticas tales como la amplitud y la frecuencia de la senal muscular.
En cuanto a la amplitud, la senal varıa entre 0-6(mV) y la actividad frecuencial entre 0-
500 Hertz(Hz), siendo el rango entre 10 a 300 Hz en donde la mayorıa de las activaciones
musculares se concentran [Duran Acevedo and Jaimes Mogollon, 2013,Quinayas-Burgos and
Gaviria-Lopez, 2015], tal como se muestra en la figura 4-9, donde en (a) se observa la lınea
base, la cual indica normalmente la duracion entre el comienzo y final de los potenciales de
accion, se considera por tener un valor igual a 0mV, sin embargo, diversos artefactos afectan

12 4 Marco referencial
la lınea base distorsionando esta caracterıstica [Fernandez et al., 2007].
Figura 4-9.: Senal electromiografica. a) Amplitud vs numero de muestras, valor medio o
valor DC de 3mV. b) Amplitud vs Frecuencia. Adaptado de [Duran Acevedo
and Jaimes Mogollon, 2013]
Para el registro de senales de EMG tradicionalmente se emplean dos electrodos los cuales
suponen un canal para la adquisicion de los potenciales electricos. Dichos electrodos se posi-
cionan uno sobre el musculo de interes y el otro lejos de la zona de estudio como electrodo de
referencia, con el fin de registrar la propagacion de la onda a lo largo de las fibras musculares
que pertenecen a la unidad motora, registro que se conoce como grabacion monopolar [Las
Heras Campos, 2016]. Por otro lado, la configuracion usual es la grabacion bipolar, en la
cual se emplean dos electrodos cercanos encima del musculo a tratar, lo que conlleva la
combinacion de la actividad de un electrodo con la de otro y la disminucion del area de
grabacion debido a una separacion mas corta entre electrodos. Una consecuencia natural de
estos montajes bipolares es, la disminucion de la amplitud de las senales y la eliminacion de
un campo lejano, con respecto a la grabacion monopolar [Eciolaza Ferrando and Navallas
Irujo, 2016, Las Heras Campos, 2016]. Normalmente para la obtencion de senales EMG se
emplean electrodos bipolares de superficie con la finalidad de construir dos canales de ad-
quisicion para la senal de EMG [Romo et al., 2007], aunque se ha demostrado en diversos
estudios que incrementar el numero de canales puede mejorar el reconocimiento de patrones
musculares [Scheme and Englehart, 2011].
4.1.4. Electromiografıa multicanal(HD-EMG)
Debido a lo anterior, y desde la decada de 1980, se viene desarrollando la electromiografıa de
alta densidad o multicanal (HD-EMG), siendo una tecnica que procede del EMG permitiendo
obtener propiedades de los potenciales de accion y la cantidad de unidades motoras activadas.
Proporciona informacion adicional a la grabacion bipolar regular, debido a que es capaz de
registrar la activacion muscular con respecto al espacio o estructura anatomica de interes

4.1 Marco Teorico 13
[Dick F. et al., 2013]. Lo anterior es debido a que HD-EMG comprende una serie de arreglos
de electrodos dispuestos en forma de cuadrıcula bidimensional con una separacion estrecha,
tal y como se observa en la figura 4-10 [Zwarts and Stegeman, 2003], con el fin de identificar
de manera separada las fuentes de senal cercanas, mejorando ası la precision de identificacion
de inervacion de grupos musculares especıficos y la heterogeneidad espacial en la distribucion
de la actividad muscular [Barrios a et al., 2017,Tucker et al., 2009]. Mediante esta tecnica se
extraen caracterısticas sinergicas del musculo aportando mayor informacion de las unidades
motoras(UM) con respecto a las grabaciones convencionales [Cambria et al., 2016].
Figura 4-10.: Arreglo matricial de electrodos para la obtencion de senales de HD-EMG.
Adaptado de [Jordanic et al., 2017b]
4.1.5. Aplicaciones del registro muscular (Rehabilitacion robotica)
Las tecnologıas roboticas parten de los movimientos naturales del paciente teniendo en cuenta
su estado funcional, permitiendo mejorar la calidad del movimiento, recuperacion del equili-
brio, autonomıa en tareas y demas [Ortiz Corredor et al., 2016]. Las ventajas de estas tecnicas
de rehabilitacion son amplias, entre las cuales se encuentran: Realizar mediciones relevan-
tes y fiables del rendimiento de los pacientes con el fin de ser analizados por fisioterapeutas
midiendo efectividad y seguimiento de la terapia [Newport, 2006], realizacion de tareas inten-
samente repetitivas durante largos perıodos de tiempo [Ortiz Corredor et al., 2016], aportar
sistemas de retroalimentacion al paciente y ajuste a los requerimientos [Loeza, 2015]. Por
otra parte, la composicion de estos dispositivos roboticos consta de una estructura mecanica,
actuadores electricos, secuencias de tareas, sensores y procesadores [Ortiz Corredor et al.,
2016].
Las senales musculares se emplean como control de equipos roboticos que estan orientados
a terapias de rehabilitacion, entre los cuales se distinguen: robots de asistencia en la mar-
cha, protesis mioelectricas y exoesqueletos, ejemplos que se observan en figura 4-11 [Loeza,
2015]. La asistencia robotica permite realizar tareas especıficas de forma repetitiva para la
recuperacion motora despues de una lesion neurologica [Ortiz Corredor et al., 2016], siendo

14 4 Marco referencial
las protesis mioelectricas una de las que aporta libertad de movimiento en extremidades su-
periores [Romo et al., 2007]. Dentro de las ventajas mas destacadas de este tipo de protesis
es la naturalidad del funcionamiento, debido a que se basa en los patrones fisiologicos de mo-
vimiento aportando autonomıa de control, por ejemplo, empleando los musculos residuales
tras una amputacion [Scheme and Englehart, 2011].
Figura 4-11.: Ejemplos de equipos roboticos para terapias de rehabilitacion. Izquierda te-
rapia robotica interactiva. Derecha protesis mioelectrica [Scheme and En-
glehart, 2011]
Especıficamente para la rehabilitacion de miembros inferiores y rehabilitacion de marcha
estan los exoesqueletos de miembro inferior [Ortiz Corredor et al., 2016]. Los exoesqueletos
son dispositivos electromecanicos capaces de soportar fuerzas y ademas tener resistencia,
potencia y flexibilidad ya que estan destinados a soportar el cuerpo [Aguirre and Balza, 2015],
es por esto que son conocidos como exotrajes cuyo funcionamiento esta ligado a una serie de
sensores EMG, permitiendo recuperar la locomocion segun la intencion de la accion muscular,
permitiendo una adaptacion al paciente [Mantilla and Santa, 2017]. Existen tecnicas que se
emplean en la rehabilitacion robotica, entre las cuales se encuentra el reconocimiento de
patrones y la estimacion de la intensidad muscular. Teniendo en cuenta lo anterior, para que
la adaptacion sea adecuada es necesario realizar un procesamiento de las senales musculares
para identificar la intencion y direccion del movimiento [Quinayas-Burgos and Gaviria-Lopez,
2015].
4.1.6. Analisis y procesamiento del registro muscular
Las senales electromiograficas contienen informacion muscular, es por esto que se ha consoli-
dado una metodologıa para su analisis, la cual normalmente se compone en preprocesamiento,
extraccion de caracterısticas, clasificacion y finalmente evaluacion del metodo de clasifica-
cion [Scheme and Englehart, 2011]. La senal habitualmente presenta ciertos artefactos debido
a fuentes de ruido, como lo son la interferencia en la frecuencia de 60 Hz (proveniente de la
4.1 Marco Teorico 15
alimentacion electrica), interferencias electromagneticas, cambio en la posicion del electrodo
con respecto a la superficie de la piel y la cantidad de canales de adquisicion de la senal [Qui-
nayas-Burgos and Gaviria-Lopez, 2015].
Debido a lo anterior, se realiza un preprocesamiento de la senal, el cual consiste en preparar
la senal [Zecca et al., 2002]. Dentro de este proceso normalmente se realiza: (1) Aplicacion de
filtros digitales a traves de modelos matematicos, como, por ejemplo, el uso de filtros pasa-
banda, lo que permite establecer el rango de frecuencias que son propias de la senal [Duran
Acevedo and Jaimes Mogollon, 2013,Quinayas-Burgos and Gaviria-Lopez, 2015]. (2) Reduc-
cion de la dimensionalidad, proceso en el cual se analiza la variabilidad entre los datos [Duran
Acevedo and Jaimes Mogollon, 2013]. (3) Normalizacion de datos, en donde a cada valor se
le resta el valor medio, con la finalidad de establecer en un rango definido todos los datos de
la senal [Romo et al., 2007]. (4) Interpolacion, consiste en agregar datos a la senal mediante
diversos calculos, se hace necesario cuando existen datos faltantes en el registro o se conside-
ran como artefactos [Rojas-Martınez et al., 2017]. (5) Segmentacion de datos por ventana, en
donde la senal es analizada por cierta longitud equitativa de datos, lo cual permite reducir
la variabilidad mejorando la clasificacion [Scheme and Englehart, 2011].
Como se menciono anteriormente durante la etapa de analisis y procesamiento de las senales
EMG se aplican filtros digitales con la finalidad de eliminar informacion que no proviene de
la activacion muscular, por lo tanto se tiene que para los filtros digitales existen diversas
configuraciones como lo son pasa bajo, pasa alto, rechaza banda, pasabanda, el ultimo por
ser el que mayormente se emplea en senales EMG, ya que permite establecer una banda
de frecuencias permitidas [Quinayas-Burgos and Gaviria-Lopez, 2015], la respuesta de estos
filtros se observa en la ecuacion 4-1, donde H(z) es la funcion de transferencia que filtra la
senal X(z) a partir de unos coeficientes dados por el orden del filtro, con lo que se obtiene la
salida limpia de la senal original Y(z).
H(z) =Y (z)
X(z)=
b(1) + b(2)z−1 + ...+ b(bn+ 1)znb
a(1) + a(2)z−1 + ...+ a(na+ 1)zna(4-1)
Las caracterısticas son un conjunto de valores diferenciables que son propias o pertenecen
a un grupo de datos o senales, los cuales contienen informacion relevante y se organizan
en un vector de caracterısticas [Cifuentes Gonzalez, 2012]. En cuanto a la extraccion de ca-
racterısticas, en general se pueden obtener directamente de la senal, como la amplitud del
estımulo en los musculos [Romo et al., 2007], o la velocidad de conduccion mediante el anali-
sis de la frecuencia, las cuales se calculan mediante diversas tecnicas [Gila et al., 2009,Laın,
2012]. A continuacion, se presentan algunas caracterısticas que son extraıdas usualmente en
las senales bioelectricas, tanto en espacio temporal, frecuencial y espacial (tabla 4-1).

16 4 Marco referencial
Caracterısica Descripcion Ecuacion
Dominio
temporal
Valor
cuadratico
medio(RMS)
Mide la actividad electrica
de la senal de EMG.
Calcula la raız cuadrada de
la potencia media de la senal
durante un lapso de tiempo
[Dıaz & Lopez, 1994]
XRMS =√
1N
∑Nn=1 |Xn|2
x representa el vector
de datos desde n,
hasta la totalidad N
Desviacion
estandar(STD)
Estima que tan separados
estan los datos respecto a
la media [Cifuentes
Gonzalez, 2012].
S =√
1N−1
∑Ni=1 |Ai −mean(A)|2
Donde A el vector de datos
y N las observaciones
Dominio
frecuencial
Frecuencia
mediana(MDF)
Establece la frecuencia en la
cual es espectro se divide en
dos regiones con amplitudes
iguales[Ahamed et al., 2017].
∑j=1MDF Pj =
∑Mj=MDF = 1
2
∑j=1M Pj
P se define como el espectro
de la senal de EMG
Frecuencia
media(MNF)
Se calcula mediante la suma
del producto del espectro de
potencia de la senal de EMG y
la frecuencia entre la suma
total de la intesidad del espectro
[Ahamed et al., 2017].
MNF =∑M
j=1 fjPj/∑M
j=1 PjDonde f es la frecuencia en j y
P es el espectro de la frecuencia
M es la potencia proxima de
la cantidad de datos de la
senal EMG
Dominio
EspacialIntensidad(Ilog)
Es el logaritmo comun de la
intensidad media del mapa de
activacion[Jordanic et al., 2016] .
Ilog = log101N
∑ij HMij
HM corresponde al mapa
de activacion, ij la ubicacion
de los pıxeles
Centro de
gravedad(CG)
Permite identificar la
distribucion espacial segun la
intensidad de la activacion
muscular[Overeem et al., 2008].
CG = 1∑ji HM
∑ij HM [ij]
HM correspode al mapa
de activacion, ij la ubicacion
de los pıxeles
Tabla 4-1.: Caracterısticas que usualmente se extraen de senales bioelectricas
A partir del uso de caracterısticas en el dominio frecuencial y temporal, como el valor RMS,
es posible construir mapas de activacion mioelectrica, los cuales representan la distribucion
espacial de las fibras musculares, la intensidad de las unidades motoras, especıficamente
cuando son activadas [Jordanic, 2017]. Esto permite obtener informacion topografica del

4.1 Marco Teorico 17
comportamiento de los musculos durante la realizacion de diferentes tareas motoras, sea en
contracciones dinamicas e isometricas [Mills, 2005, Mondelli et al., 2014]. Al implementar
caracterısticas de distribucion espacial de los mapas de activacion anteriormente construidos
es posible determinar la intensidad de la contraccion, como se observa en la figura 4-12.
Figura 4-12.: Mapas de activacion mioelectricos construidos con diferentes metodos. Iz-
quierda, a traves del uso de RMS. Centro, a partir del uso del espectro de
frecuencia media [Arendt-Nielsen et al., 2008]. Derecha, aplicacion de carac-
terısticas espaciales para determinar la intensidad de la inervacion muscu-
lar [Farina and Falla, 2008]
Por lo tanto, el vector de caracterısticas que se obtiene de la senal se conforma de rasgos
temporales, frecuenciales, espaciales o la combinacion de las anteriores [Cifuentes Gonzalez,
2012]. La combinacion de diferentes tipos de caracterısticas y la informacion de varios canales
se emplea para identificar la intencion de movimiento usando alguna tecnica de clasificacion.
4.1.7. Aprendizaje automatico
Un clasificador se define como una herramienta matematica empleada para la separacion de
un grupo de datos de forma automatica teniendo en cuenta sus caracterısticas distintivas
empleando tecnicas estadısticas y de inteligencia artificial [Quinayas-Burgos and Gaviria-
Lopez, 2015, Cifuentes Gonzalez, 2012]. Dentro de las tecnicas de clasificacion se emplea
una particion en el conjunto de datos, en donde un porcentaje se destina a entrenar el
sistema y un porcentaje a la validacion, los clasificadores ademas requieren de un proceso
de aprendizaje, durante este proceso se estiman los parametros del modelo y durante la
validacion se comprueba la capacidad del modelo de estimar las clases. Esta particion de
subconjuntos puede ser aleatoria o estratificada, lo importante es evitar un sesgo de forma tal
que los datos de aprendizaje sean distintos a los de validacion [Huang et al., 2020]. Segun se
requiera y se conozca una salida conocida (Groundtruth), existen modelos de entrenamiento
supervisados y no supervisados (tabla 4-2), su clasificacion depende de un supervisor como
agente externo que controla este proceso [Cabarcas Barboza and Guerrero Castilla, 2007].

18 4 Marco referencial
Supervisados No supervisados
Se verifican los datos de clasificacion.
Por medio de la supervision se
comprueba la salida del clasificador y
se ajustan parametros para aproximar
la salida al valor real.
Se ajustan a partir de 3 tipos de
aprendizaje:
1. En funcion del error de clasificacion.
2. Por esfuerzo, mediante el cual se da
una senal al clasificador sobre el exito
o fracaso, sin indicar la salida que se
desea.
3. Por distribuciones de probabilidad de
forma aleatoria, se denomina estocastico.
No se verifican resultados de clasificacion.
No existe supervision, por lo tanto, no se
ajusta el entrenador de forma externa, lo
que genera mayor probabilidad de
interpretacion de la informacion.
Para este tipo de aprendizaje se tiene en
cuenta:
1. Hebbiano, en el cual se obtienen las
correlaciones de las aproximaciones, si se
acerca a la salida, esta se refuerza, de lo
contrario se debilita la aproximacion.
2. Competitivo, en donde se obtienen varias
aproximaciones, la que mas se acerque es la
que se elige.
Tabla 4-2.: Cuadro comparativo de los metodos de clasificacion supervisados y no supervisa-
dos [Cabarcas Barboza and Guerrero Castilla, 2007,Carrasco Henao, 2016,Jor-
danic, 2017]
Dentro de las tecnicas de clasificacion existen varios modelos que estan en capacidad de
predecir la pertenencia de una clase a partir de un conjunto de descriptores, su uso depende
de la aplicacion, algunos de ellos se describen en la siguiente seccion.
Redes neuronales, Es un sistema computacional inspirado en las redes neuronales biologi-
cas y la organizacion de las neuronas en el cerebro, en donde se busca que el modelo obtenga
la habilidad para aprender de la experiencia, adaptandose a cambios de la senal, compuesto
por niveles o capas compuestos por nodeos que actuan como procesadores intermedios, como
se ilustra en la imagen 4-14. Este modelo puede ser supervisado o no supervisado [Cabarcas
Barboza and Guerrero Castilla, 2007].

4.1 Marco Teorico 19
Figura 4-13.: Configuracion de una red neuronal
Maquinas de soporte vectorial (SVM), esta tecnica permite la separacion de clases muy
proximas por medio hiperplanos proyectados en espacios dimensionales. Puede ser empleado
en senales donde existen multiples clases, la separabilidad puede ser lineal o no lineal [Lucas
et al., 2008].
Dado un espacio de valores dado, el que cada observacion describe una posible categorıa,
la SVM permite la construccion de un modelo para otorgar una observacion desconocida
una categorıa, de forma tal que no se transforman las observaciones originales, sino que se
obtiene un nuevo espacio que permite separar las diferentes clases, usualmente mediante un
espacio mas amplio, por medio del kernel trick, buscando el hiperplano N-dimensional con
la maxima distancia entre los puntos, el cual puede ser de base lineal, cuadratica, de distri-
bucion gaussiana o incluso polinomica [Togacar et al., 2020].
Clasificadores Bayesianos, los cuales tienen bases estadısticas y de probabilidad segun el
teorema de Bayes, que se observa en la ecuacion 4-2, este metodo de clasificacion permite
predecir una clase debido a las relaciones de probabilidad de la informacion de las clases
de entrenamiento, ademas de ser uno de los mas sencilos y rapidos de implementar [Romo
et al., 2007].
P (A|B) =P (A|B)P (A)
P (B)(4-2)
En la acuacion 4-2 se observa l teorema de Bayes, en donde se calcula la probabilidad de B
de pertenecer al esopacio A.
20 4 Marco referencial
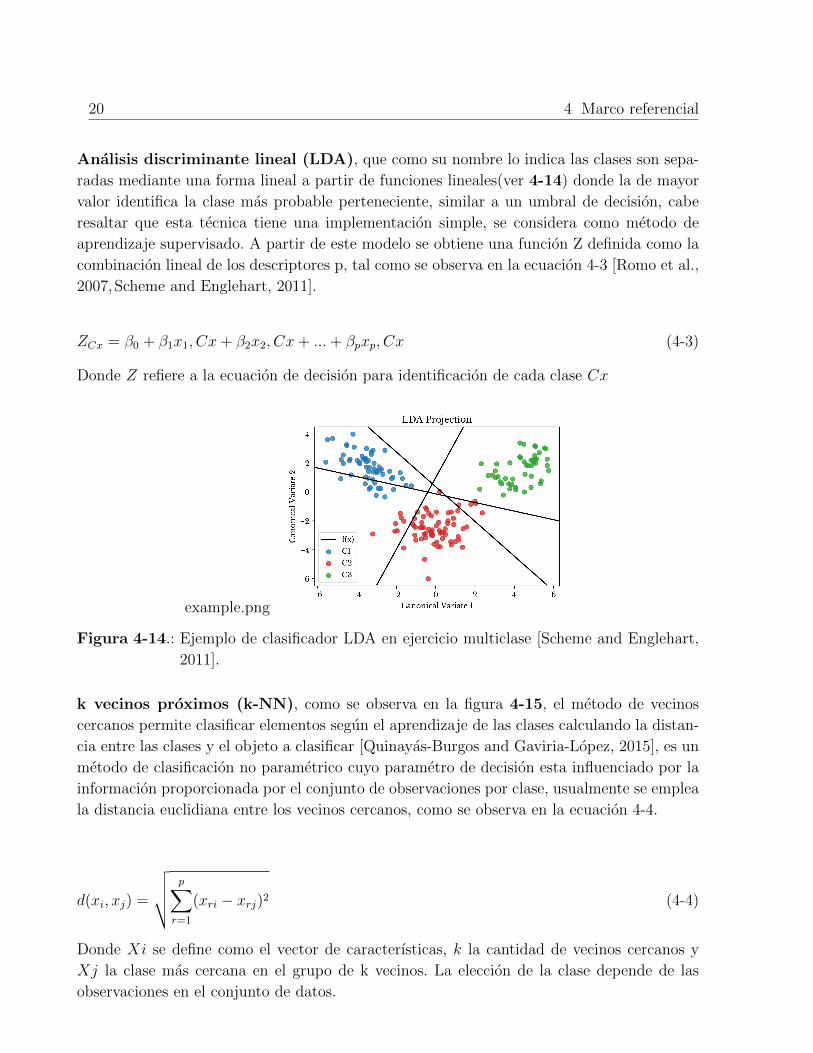
Analisis discriminante lineal (LDA), que como su nombre lo indica las clases son sepa-
radas mediante una forma lineal a partir de funciones lineales(ver 4-14) donde la de mayor
valor identifica la clase mas probable perteneciente, similar a un umbral de decision, cabe
resaltar que esta tecnica tiene una implementacion simple, se considera como metodo de
aprendizaje supervisado. A partir de este modelo se obtiene una funcion Z definida como la
combinacion lineal de los descriptores p, tal como se observa en la ecuacion 4-3 [Romo et al.,
2007,Scheme and Englehart, 2011].
ZCx = β0 + β1x1, Cx+ β2x2, Cx+ ...+ βpxp, Cx (4-3)
Donde Z refiere a la ecuacion de decision para identificacion de cada clase Cx
example.png
Figura 4-14.: Ejemplo de clasificador LDA en ejercicio multiclase [Scheme and Englehart,
2011].
k vecinos proximos (k-NN), como se observa en la figura 4-15, el metodo de vecinos
cercanos permite clasificar elementos segun el aprendizaje de las clases calculando la distan-
cia entre las clases y el objeto a clasificar [Quinayas-Burgos and Gaviria-Lopez, 2015], es un
metodo de clasificacion no parametrico cuyo parametro de decision esta influenciado por la
informacion proporcionada por el conjunto de observaciones por clase, usualmente se emplea
la distancia euclidiana entre los vecinos cercanos, como se observa en la ecuacion 4-4.
d(xi, xj) =
√√√√ p∑r=1
(xri − xrj)2 (4-4)
Donde Xi se define como el vector de caracterısticas, k la cantidad de vecinos cercanos y
Xj la clase mas cercana en el grupo de k vecinos. La eleccion de la clase depende de las
observaciones en el conjunto de datos.

4.2 Marco legal 21
Figura 4-15.: Representacion de metodo K vecinos proximos
Despues de aplicar el modelo de clasificacion se debe reconocer como es el desempeno del
mismo de forma externa, con el fin de evaluar y cuantificar el rendimiento (Lucas, et al.,
2008), en esta etapa del procesamiento se pueden emplear diversas tecnicas tales como:
Validacion cruzada,en este metodo se tienen dos conjuntos, uno etiquetado como
las salidas del entrenamiento y otro para pruebas de validacion, de esta manera entre
estos dos conjuntos se halla la precision de prediccion del modelo [Lucas et al., 2008].
El rendimiento del modelo tambien puede ser cuantificado en medidas de sensibilidad,
precision, especificidad y exactitud, para estas metricas se tienen en cuenta los
verdaderos positivos(VP), es decir, la cantidad de muestras que fueron correctamente
agregadas a una clase, Verdaderos negativos(VN), como el numero de muestras que no
pertenecen a una clase determinada y no se clasificaron como tal, Falsos positivos(FP),
numero de muestras que no pertenecen a cierta clase, pero que se clasifican erronea-
mente en esa clase y por ultimo, los falsos negativos(FN) es el numero de muestras
que pertenecen a una determinada clase, pero son clasificadas erroneamente [Jordanic,
2017,Rojas-Martınez et al., 2017].
Matriz de confusion, que como su nombre lo indica es una matriz que permite
evaluar la prediccion del modelo de clasificacion, teniendo en cuenta la cantidad de
VP, VN, FP y FN [Palacio et al., 2013].
4.2. Marco legal
Se debe tener en cuenta aquellas normas nacionales e internacionales que dictan los lineamien-
tos necesarios para el tratamiento de datos personales, para este caso las senales biologicas
de los voluntarios. Segun resoluciones, normas y leyes a continuacion se expresan aquellas
que concuerdan con la naturaleza de este proyecto:

22 4 Marco referencial
DIRECTIVAS INTERNACIONALES PARA LA INVESTIGACION BIOMEDICA EN SE-
RES HUMANOS: En donde se habla de los procesos de investigacion que aporten al cono-
cimiento corroborado por metodos cientıficos relacionados con la salud humana, como por
ejemplo registros o utilizacion de datos que contienen informacion biologica. Ademas, se de-
ben tener en cuenta 3 principios eticos para llevar a cabo investigacion en seres humanos,
los cuales son: respeto por las personas, beneficencia y justicia.
Pauta 18 Proteccion de la confidencialidad: Especıficamente, esta pauta se refiere a la
confidencialidad por parte del investigador, el cual tiene el deber de establecer protec-
ciones seguras para la confidencialidad de los datos empleados en la investigacion a
partir de los sujetos [Consejo de organizaciones Internacionales de las Ciencias Medi-
cas(CIOMS), 2002].
LEY ESTATUTARIA 1581 DE 2012: A Partir de esta ley se establecen los lineamientos pa-
ra el tratamiento, sanciones y legalidad para el uso de datos personales dentro de territorio
colombiano, con el fin de aplicar dicha legislacion en virtud de normas y tratados interna-
cionales [Gobierno Nacional Colombia, 2012].
RESOLUCION 8430 DE 1993: Se establecen normas cientıficas, tecnicas, administrativas y
eticas sobre la investigacion en salud. Catalogando esta investigacion sin riesgo, ya que, segun
su definicion, se abarcan estudios documentales que no intervienen ni modifican variables
biologicas de los sujetos de estudio [Ministerio de Salud, 1993].
4.3. Estado del arte
Usualmente se emplea la tecnica de EMG bipolar para la obtencion de las senales muscula-
res, sin embargo, dicha senal es susceptible a interferencias causadas por musculos cercanos
al musculo de estudio, tambien conocido como crosstalk [Arendt-Nielsen et al., 2008]. Adi-
cionalmente se requiere que la ubicacion de los electrodos posea una distancia mınima entre
ellos para poder detectar la actividad electrica de las unidades motoras(UM), dificultando la
identificacion de las tareas motoras, sobre todo aquellas con contracciones dinamicas, entre
otras complicaciones [Merletti and Parker, 2004].
A partir de la ultima decada, diferentes autores han tenido como objeto de estudio la iden-
tificacion automatica de direccion del movimiento, donde parten del uso de EMG bipolar
para dicha tarea, con la finalidad de mejorar el rendimiento en las interfaces hombre-maqui-
na para el control de protesis mioelectricas [Palacio et al., 2013]. Unicamente el uso de las
senales de EMG convencional (bipolar) no es suficiente para determinar la direccion del
movimiento, por lo que Khezri et al. implementaron un sistema para el reconocimiento de
patrones a partir de ANFIS (sistema adaptable basado en una red de inferencia difusa), en
4.3 Estado del arte 23
donde los movimientos de extension y flexion obtuvieron el menor porcentaje de exito, des-
de un 78 % hasta un 88 %, siendo los mas complicados de reconocer [Khezri and Jahed, 2007].
Se han explorado bastantes tecnicas para la extraccion de caracterısticas en sEMG convencio-
nal a partir de metodos estadısticos en el dominio temporal y frecuencial [Cabarcas Barboza
and Guerrero Castilla, 2007]. El problema recae en la naturaleza de la contraccion muscular:
si es estacionaria existe una relacion lineal entre la amplitud y la fuerza, evidenciada en con-
tracciones isometricas; en el caso de las contracciones dinamicas no existe linealidad entre
amplitud de la senal y fuerza, dificultando el reconocimiento de direccion del movimiento
debido a que la sEMG convencional no es capaz de identificar la actividad muscular de otros
grupos musculares a la vez [Montoya et al., 2015]. Sin embargo, con el uso de tecnicas para
la clasificacion como redes neuro-nales difusas, se mejoro el rendimiento que fue afectado por
cambios dinamicos durante la contraccion [Romo et al., 2007]. Aunque, dicha mejora aun no
era lo suficientemente aceptable para su implementacion en lazos de control controlados por
senales mioelectricas.
Como soluciones a la problematica de no poder identificar la direccion en movimientos
dinamicos con el uso de sEMG bipolar, algunos investigadores propusieron sistemas de clasi-
ficacion dinamicos que concordaran con los cambios de velocidad y fuerza en los movimientos,
como el trabajo desarrollado por Sandoval et al., en donde utilizo una poblacion de 23 pacien-
tes para la realizacion del estudio, de los cuales el 52 % se destinaron para el entrenamiento del
modelo y el 48 % para validacion. A pesar de haber implementado una red neuronal dinami-
ca, al igual que Khezri et al. los movimientos mas difıciles de identificar fueron aquellos que
involucran un alargamiento del musculo, como la flexion y extension [Sandoval Rodriguez
et al., 2007], denotando que el clasificador no influirıa directamente en la identificacion de
movimientos dinamicos [Sandoval Rodriguez, 2013], sino probablemente las propiedades de
las caracterısticas extraıdas de la senal [Phinyomark et al., 2013].
No solo se han disenado interfaces hombre-maquina a partir del uso de sEMG convencional
para el control de protesis mioelectricas, tambien se han disenado sistemas para el control
de instrumentos de automatizacion y procesos industriales controlados por senales muscula-
res, partiendo del reconocimiento de la direccionalidad de los movimientos naturales de los
musculos, esto a partir de maquinas de soporte vectorial [Orozco Gutierrez et al., 2005]. Sin
embargo, Garcıa et al. encontraron que el algoritmo utilizado en su estudio solo permite tra-
bajar con pocas clases, debido a que el entrenamiento del modelo es bastante tedioso, aunque
funciona bastante bien para la clasificacion de clases no linealmente separables [Garcıa and
Mendoza, 2014], lo que se traduce en deteccion de pocas direcciones de movimiento.
Por lo tanto, surge el uso de HD-EMG como tecnologıa que dispone informacion fisiologica
y topografica de la actividad muscular [Mills, 2005, Mondelli et al., 2014]. Es por esto que,
24 4 Marco referencial
la electromiografıa de alta densidad o multicanal(HD-EMG) pretende emplear un arreglo
matricial de electrodos con el fin de identificar de manera separada las fuentes de senales
cercanas, mejorando ası la precision para la identificacion de inervaciones de grupos muscula-
res especıficos y la determinacion de como ocurren los potenciales de accion [Barrios a et al.,
2017]. Ademas de esto, Dick Stageman et al. identificaron que las ventajas de HD-EMG fren-
te a otras tecnologıas esta en la identificacion del potencial de accion de la unidad motora
y su relacion con la anatomıa muscular o en el patron de descarga, ademas de caracterizar
la activacion muscular en terminos de distribucion espacial y su relacion con la fisiologıa de
las neuronas motoras [Dick F. et al., 2013].
Sin embargo, segun Farina et al., en trabajos anteriores, ciertas estimaciones de la activacion
muscular que se llevaron por medio de HD-EMG con metodos y tecnicas de extraccion de
caracterısticas tradicionales no fueron representativas para estimar con precision la veloci-
dad de conduccion de la activacion muscular [Farina and Falla, 2008], identificando que el
problema es debido al metodo de la adquisicion de la senal y a la cantidad de electrodos
empleados, ya que tiene una alta sensibilidad frente a artefactos causados por crosstalk entre
electrodos y las variaciones de la intensidad muscular [Phinyomark and Scheme, 2018].
Segun lo anterior, el uso de caracterısticas convencionales en HD-EMG no permiten determi-
nar ciertos parametros de la actividad muscular con certeza. Siendo Kleine et al. uno de los
primeros autores en utilizar un arreglo de canales de sEMG para adquirir senales musculares,
recalcando el uso de topografıa para evaluar la amplitud de la senal muscular del trapecio,
identificando que la activacion muscular posee patrones de distribucion espacial y que la
intensidad de dicha activacion puede variar dependiendo de algunos factores como la fatiga,
conclusion a la que llegaron variando la maxima contraccion voluntaria de los pacientes,
evaluando los mapas topograficos antes y despues de los ejercicios [Kleine et al., 2000]. De
este modo se abren las posibilidades de implementar imagenes para la caracterizacion de la
distribucion espacial de la actividad muscular.
A partir de esto, con el uso de HD-EMG se identifico que existen cambios en la distribucion
espacial en la activacion de los musculos y que esta directamente correlacionado con la dura-
cion de la contraccion [Arendt-Nielsen et al., 2008]. Para este estudio Arendt-Nielsen et al.
implementaron el uso de caracterısticas espaciales, como el centro de gravedad, para determi-
nar la direccion de la propagacion de los potenciales de accion. En donde, se podrıa concluir
que el uso de caracterısticas de distribucion espacial permitirıa identificar la heterogeneidad
de la activacion muscular y el funcionamiento natural de las contracciones musculares, hasta
el momento evaluado en contracciones isometricas [Staudenmann et al., 2009].
Al comprender que el uso de caracterısticas espaciales permite identificar propiedades fi-
siologicas de la activacion muscular, bastantes autores implementaron HD-EMG con el fin

4.3 Estado del arte 25
de extraer sus mapas de activacion [Overeem et al., 2008, Tucker et al., 2009]. A partir de
esto, Farina et al implementaron diferentes metodos para la construccion de mapas de acti-
vacion muscular, ademas de usar el valor RMS tambien implementaron la potencia media del
espectro de frecuencia a partir de diferentes niveles de esfuerzo, en donde los mapas de acti-
vacion obtenidos representan la ubicacion de la inervacion muscular, en donde determinaron
que los mapas de activacion muscular cambian con respecto al tiempo, siendo cuantificado
a partir del calculo del centro de gravedad [Arendt-Nielsen et al., 2008].
Recientemente se han implementado caracterısticas de distribucion espacial como el centro
de gravedad, la intensidad muscular y variogramas [Farina and Falla, 2008, Overeem et al.,
2008, Stango et al., 2015] para la identificacion de la direccion de movimiento en tareas
motoras dinamicas e isometricas, resaltando que al usar en conjunto caracterısticas en el
dominio temporal, frecuencial y espacial se abarca de forma mas completa el funcionamiento
fisiologico de las fibras musculares, siendo posible mejorar el rendimiento del modelo de
clasificacion y por ende identificar la direccion de movimiento [Jordanic, 2017,Rojas-Martınez
et al., 2017]. Sin embargo, dicho rendimiento aun no es lo suficientemente aceptable para su
implementacion en tecnologıas para la rehabilitacion motora.

5. Metodologıa
A partir del objetivo de este proyecto de investigacion se desarrollo un proceso para la iden-
tificacion de direcciones de movimiento en contracciones dinamicas de la articulacion del
hombro, por medio de una serie de pasos metodologicos asociados a cada objetivo especıfico.
Como se describe en la figura 5-1, la metodologıa esta basada en un proceso consecutivo que
inicia con el pre-procesado de las senales HD-EMG, para obtener etiquetas de los tiempos
en lo que se ejecutan los movimientos especıficos, y disminuir el efecto de interferencias que
puedan confundir la identificacion automatica de los mismos. Posteriormente, teniendo en
cuenta que las matrices de electrodos agregan informacion espacial asociada a la activacion
muscular encontrada al mover los musculos adjuntos al hombro, la metodologıa propuesta
incluye la construccion de mapas de activacion (imagenes), de los cuales se extraen carac-
terısticas propias de cada uno de los movimientos.
/
Figura 5-1.: Diagrama de bloques metodologıa general
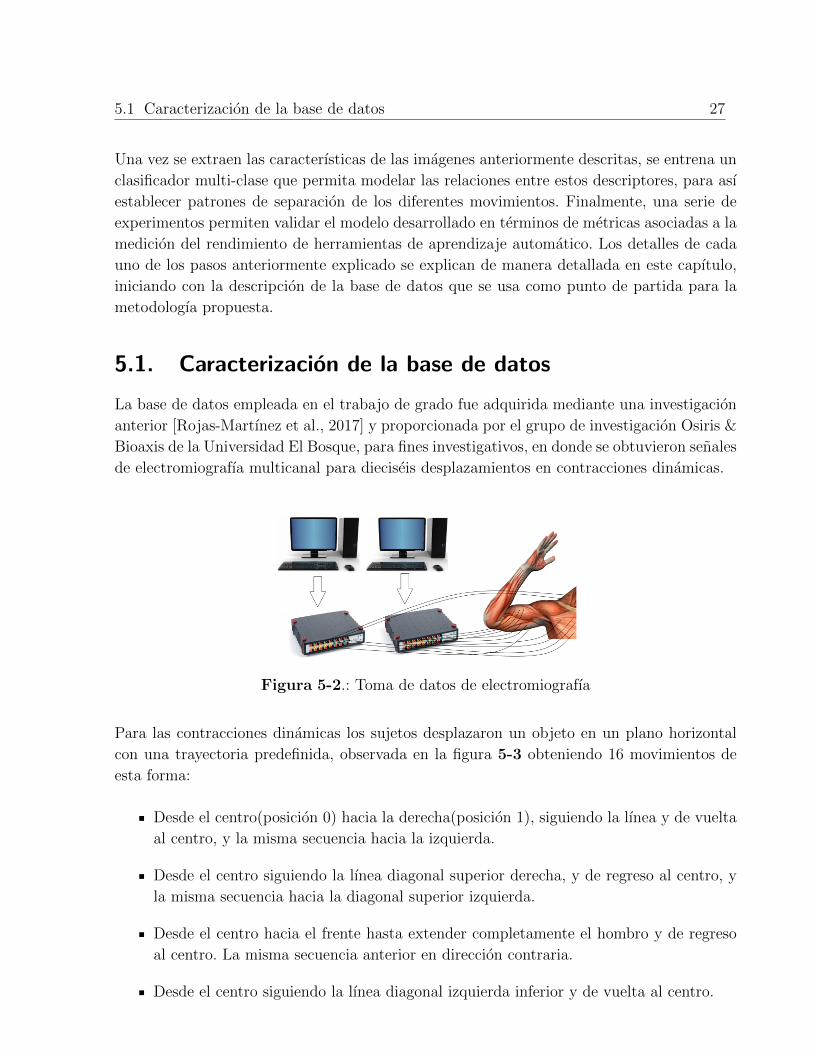
5.1 Caracterizacion de la base de datos 27
Una vez se extraen las caracterısticas de las imagenes anteriormente descritas, se entrena un
clasificador multi-clase que permita modelar las relaciones entre estos descriptores, para ası
establecer patrones de separacion de los diferentes movimientos. Finalmente, una serie de
experimentos permiten validar el modelo desarrollado en terminos de metricas asociadas a la
medicion del rendimiento de herramientas de aprendizaje automatico. Los detalles de cada
uno de los pasos anteriormente explicado se explican de manera detallada en este capıtulo,
iniciando con la descripcion de la base de datos que se usa como punto de partida para la
metodologıa propuesta.
5.1. Caracterizacion de la base de datos
La base de datos empleada en el trabajo de grado fue adquirida mediante una investigacion
anterior [Rojas-Martınez et al., 2017] y proporcionada por el grupo de investigacion Osiris &
Bioaxis de la Universidad El Bosque, para fines investigativos, en donde se obtuvieron senales
de electromiografıa multicanal para dieciseis desplazamientos en contracciones dinamicas.
Figura 5-2.: Toma de datos de electromiografıa
Para las contracciones dinamicas los sujetos desplazaron un objeto en un plano horizontal
con una trayectoria predefinida, observada en la figura 5-3 obteniendo 16 movimientos de
esta forma:
Desde el centro(posicion 0) hacia la derecha(posicion 1), siguiendo la lınea y de vuelta
al centro, y la misma secuencia hacia la izquierda.
Desde el centro siguiendo la lınea diagonal superior derecha, y de regreso al centro, y
la misma secuencia hacia la diagonal superior izquierda.
Desde el centro hacia el frente hasta extender completamente el hombro y de regreso
al centro. La misma secuencia anterior en direccion contraria.
Desde el centro siguiendo la lınea diagonal izquierda inferior y de vuelta al centro.
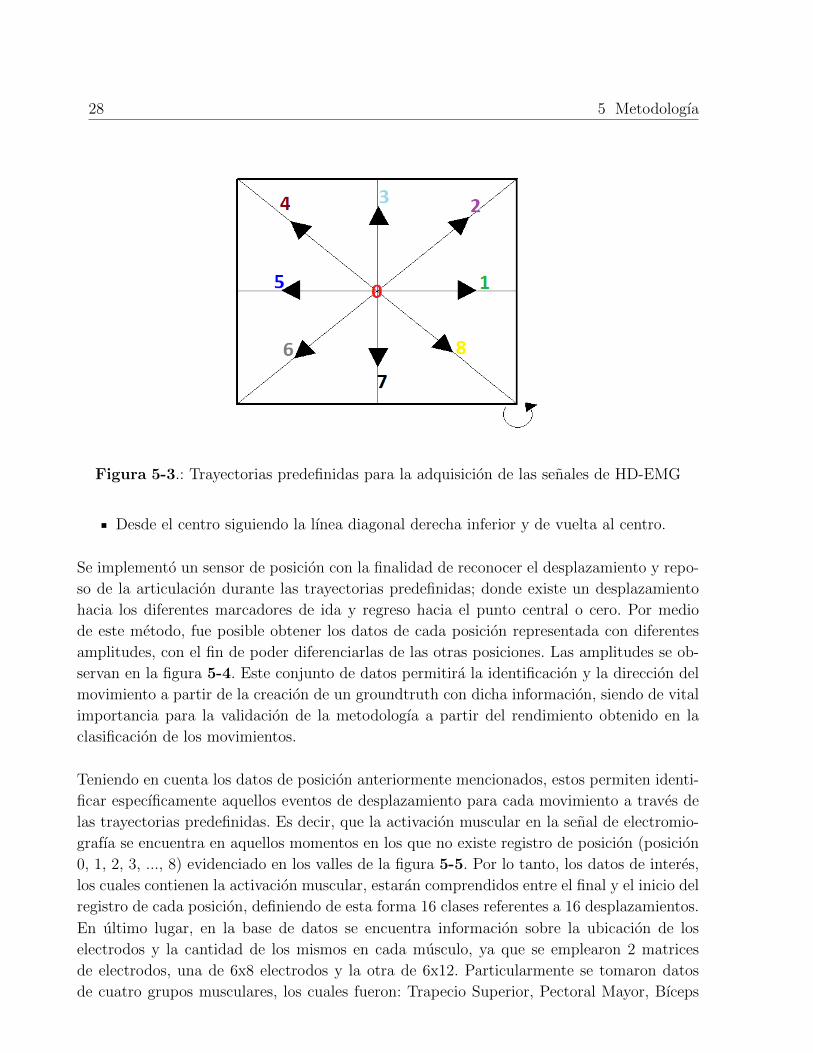
28 5 Metodologıa
Figura 5-3.: Trayectorias predefinidas para la adquisicion de las senales de HD-EMG
Desde el centro siguiendo la lınea diagonal derecha inferior y de vuelta al centro.
Se implemento un sensor de posicion con la finalidad de reconocer el desplazamiento y repo-
so de la articulacion durante las trayectorias predefinidas; donde existe un desplazamiento
hacia los diferentes marcadores de ida y regreso hacia el punto central o cero. Por medio
de este metodo, fue posible obtener los datos de cada posicion representada con diferentes
amplitudes, con el fin de poder diferenciarlas de las otras posiciones. Las amplitudes se ob-
servan en la figura 5-4. Este conjunto de datos permitira la identificacion y la direccion del
movimiento a partir de la creacion de un groundtruth con dicha informacion, siendo de vital
importancia para la validacion de la metodologıa a partir del rendimiento obtenido en la
clasificacion de los movimientos.
Teniendo en cuenta los datos de posicion anteriormente mencionados, estos permiten identi-
ficar especıficamente aquellos eventos de desplazamiento para cada movimiento a traves de
las trayectorias predefinidas. Es decir, que la activacion muscular en la senal de electromio-
grafıa se encuentra en aquellos momentos en los que no existe registro de posicion (posicion
0, 1, 2, 3, ..., 8) evidenciado en los valles de la figura 5-5. Por lo tanto, los datos de interes,
los cuales contienen la activacion muscular, estaran comprendidos entre el final y el inicio del
registro de cada posicion, definiendo de esta forma 16 clases referentes a 16 desplazamientos.
En ultimo lugar, en la base de datos se encuentra informacion sobre la ubicacion de los
electrodos y la cantidad de los mismos en cada musculo, ya que se emplearon 2 matrices
de electrodos, una de 6x8 electrodos y la otra de 6x12. Particularmente se tomaron datos
de cuatro grupos musculares, los cuales fueron: Trapecio Superior, Pectoral Mayor, Bıceps

5.1 Caracterizacion de la base de datos 29
Figura 5-4.: Marcador de posiciones
Figura 5-5.: Desplazamiento en senales EMG
Braquial Cabeza Larga y Trıceps Braquial Cabeza Lateral, los cuales hacen parte de la
articulacion del hombro. La organizacion de los electrodos para cada sujeto se observa en la
tabla 5-1.

30 5 Metodologıa
Amplificador 1 Amplificador 2
Electrodos 1-48 49-96 97-120 1-48 49-120
Sujeto 1Trapecio
Superior
Pectoral
Mayor
Biceps Braquial
Cabeza larga
Biceps Braquial
Cabeza larga
Triceps Braquial
Cabeza larga
Sujeto 2 -
Sujeto 8
Trapecio
Superior
Pectoral
Mayor
Triceps Braquial
Cabeza larga
Triceps Braquial
Cabeza larga
Biceps Braquial
Cabeza larga
Tabla 5-1.: Electrodos empleados segun los musculos para cada sujeto.
De esta forma la base de datos (BD) empleada durante el desarrollo de este trabajo consta
de las senales HD-EMG de 8 sujetos en 2 movimientos lentos y 2 rapidos, realizado mediante
el amplificador 1 y 2. Ademas de la senal de trayectoria segun la posicion de la articulacion.
5.2. Pre-procesamiento de las senales HD-EMG
Segun la descripcion de la base de datos y la forma en la que se realizaron los registros, esta
se reestructuro recurriendo a metodos de sincronizacion con el fin de relacionar temporal-
mente las senales obtenidas de los 2 amplificadores, para obtener el punto inicial y final del
registro EMG omitiendo el desfase entre las senales. Por otro lado se suavizaron las senales
de posicion, para posteriormente analizar los cruces por cero, con el objetivo de segmentar
las senales en las porciones correspondientes al movimiento dinamico. Por ultimo sobre las
senales de HD-EMG (imagenes), se identificaron canales artefactos, despues de la eliminacion
de los canales diferenciales, y se emplearon filtros esperando disminuir el efecto de ruido. Los
procesos mencionados se relacionan a continuacion:
5.2.1. Sincronizacion de las senales de los amplificadores
Como se observa en la imagen 5-6 hay un evidente desfase entre las senales de sincronizacion
de los amplificadores 1 (senal azul) y 2 (senal roja), empleados durante el registro de la BD.
Este desfase repercute en las senales musculares, ya que es necesario segmentar las senales
de tal forma que se unifique el punto inicial y final de cada movimiento (a traves de la senal
de sincronizacion), durante la toma de muestras.

5.2 Pre-procesamiento de las senales HD-EMG 31
Figura 5-6.: Evidencia de desfase temporal entre las senales de sincronizacion provenientes
de amplificador 1 (senal azul) y 2 (senal roja)
Para encontrar los datos de diferencia entre las dos senales se empleo la correlacion cruzada
(entiendase diferente a la correlacion estadıstica), ya que, permite relacionar temporalmente
dos senales [Moreno Sanz, 2017], desplazando una sobre otra, hallando el punto maximo
de similitud en diferentes instantes de tiempo, mediante la ecuacion 5-1 [Chamorro and
Ovando-shelley, 2018].
Corrx,y[k] =(∑∞
k=−∞ x[k] ∗ y[k − n])
k(5-1)
En donde el coeficiente de correlacion (Corr) entre la senales de entrada x y la senal de
salida y, se evalua en cada punto n de la senal, n = 0,±1,±2,±3..., de forma tal que, se
puede hallar el punto en donde inicia el registro del movimiento dinamico y tambien donde
finaliza. En el caso de aplicacion de este trabajo, la senal del amplificador 1 se usa para
recorrer la del amplificador 2 (retrasando una respecto a la otra) obteniendo ası, en cada
momento del desfase el punto de mayor similitud entre ambas. Posteriormente, se calculo
el coeficiente de correlacion de Pearson como indicador de la correcta sincronizacion de las
senales, ya que este indica la similitud lineal entre dos senales [Gila et al., 2009].
5.2.2. Obtencion de marcaciones de desplazamiento y posicion
Como primera tarea para extraer la senal de EMG en cada canal, resulta necesario obtener de
forma automatica la informacion del movimiento especıfica de cada desplazamiento, es decir,
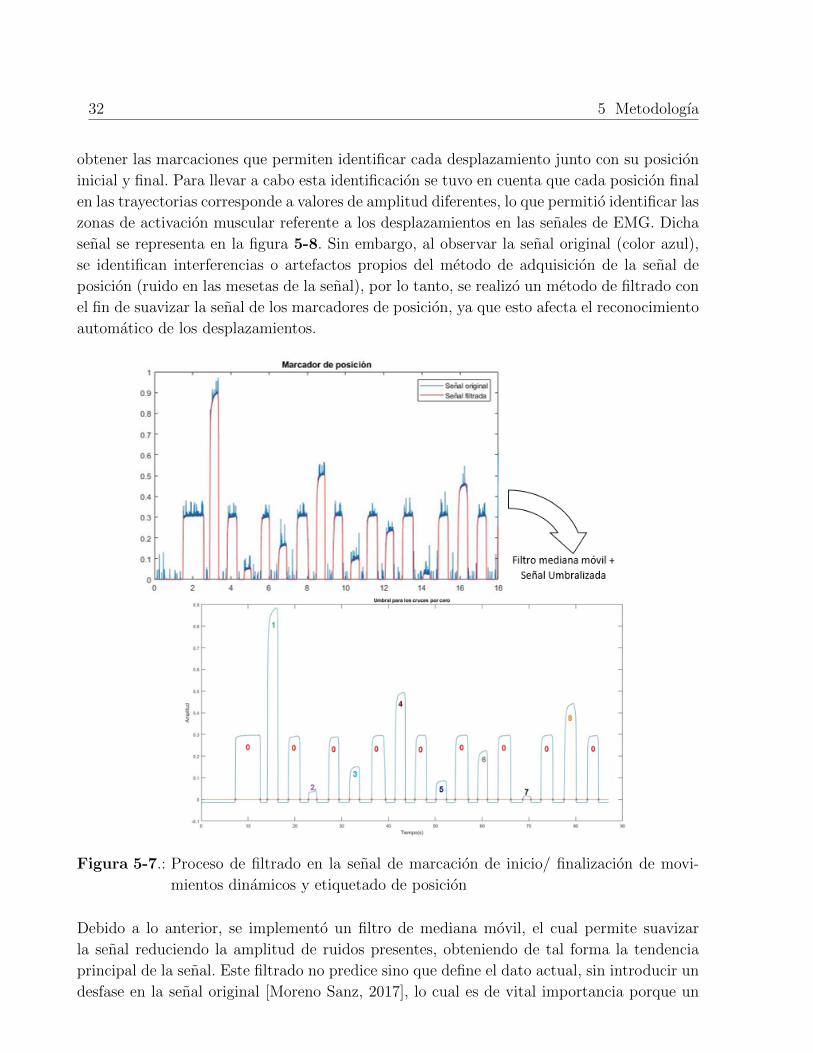
32 5 Metodologıa
obtener las marcaciones que permiten identificar cada desplazamiento junto con su posicion
inicial y final. Para llevar a cabo esta identificacion se tuvo en cuenta que cada posicion final
en las trayectorias corresponde a valores de amplitud diferentes, lo que permitio identificar las
zonas de activacion muscular referente a los desplazamientos en las senales de EMG. Dicha
senal se representa en la figura 5-8. Sin embargo, al observar la senal original (color azul),
se identifican interferencias o artefactos propios del metodo de adquisicion de la senal de
posicion (ruido en las mesetas de la senal), por lo tanto, se realizo un metodo de filtrado con
el fin de suavizar la senal de los marcadores de posicion, ya que esto afecta el reconocimiento
automatico de los desplazamientos.
Figura 5-7.: Proceso de filtrado en la senal de marcacion de inicio/ finalizacion de movi-
mientos dinamicos y etiquetado de posicion
Debido a lo anterior, se implemento un filtro de mediana movil, el cual permite suavizar
la senal reduciendo la amplitud de ruidos presentes, obteniendo de tal forma la tendencia
principal de la senal. Este filtrado no predice sino que define el dato actual, sin introducir un
desfase en la senal original [Moreno Sanz, 2017], lo cual es de vital importancia porque un

5.2 Pre-procesamiento de las senales HD-EMG 33
desfase supone un error al momento de identificar un desplazamiento especıfico en la senal
de EMG. Para dicho filtro se emplea una ventana de tamano definido que se desliza en la
senal muestra tras muestra calculando de esta forma la mediana en el tiempo, por lo cual no
es necesario realizar una transformacion frecuencial [Li et al., 2018]. Se emplearon ventanas
de diferentes tamanos para que se adecuaran a la naturaleza de la senal de posicion, en
vista de la diferencia entre los sujetos, ya que ciertos movimientos tienen una duracion mas
corta o larga, reflejandose en valles mas anchos o cortos; el tamano de ventana se vario entre
200 a 1000 muestras, equivalentes a 0,1 y 0,5 milisegundos, respectivamente, un tamano
de ventana mas corto del intervalo anterior se refleja en un filtrado ineficiente, es decir la
senal resultante con ruido y por el contrario un tamano mayor genera distorsion de la senal
original, perdiendo detalles de la misma.
Figura 5-8.: Funcionamiento de filtro de mediana movil, donde se tiene X como senal de
entrada, Y senal de salida y k el tamano de la ventana que recorre cada dato
en la senal de entrada.
Posterior al filtrado para suavizar las senales de desplazamiento resulta importante determi-
nar de forma automatica los valles entre los marcadores de posicion, i.e. el momento exacto a
partir del cual se ejecuta el cambio de posicion, y a partir de ese instante de tiempo analizar
la senal de EMG. Para esto se usa la senal del sensor en la trayectoria, aplicando el crite-
rio de cruces por cero para obtener el numero de veces y el momento especıfico en el cual
la senal pasa por un umbral de referencia establecido [Orozco Gutierrez et al., 2005]. Este
umbral de amplitud debe ser menor a la amplitud mas baja correspondiente a la posicion 7,
como de puede observar en la figura 5-8), donde una lınea naranja (umbral) cruza la senal
de desplazamiento en cada cambio de posicion. Todo el proceso anterior recordando que los
valles indican los movimientos dinamicos para cada direccion de movimiento y que el valor
de la amplitud de cada posicion permite identificar los desplazamientos, por ejemplo para la
posicion 1 (hacia la derecha), se le asigno la mayor amplitud, y a la posicion 7 (hacia abajo)
la menor, y ası para cada posicion de la trayectoria, segun lo descrito en la seccion 5.1.
5.2.3. Diseno de filtro para las senales HD-EMG
Una vez se sincronizaron las senales de los dos amplificadores y se identificaron las etiquetas
o marcadores de desplazamientos a lo largo de las senales de HD-EMG, se procedio a evaluar

34 5 Metodologıa
los estados de las senales de electromiografıa de alta densidad con la finalidad de eliminar
ruidos y artefactos que probablemente provienen del protocolo de adquisicion. En este caso,
los filtros digitales y la observacion del espectro en frecuencia de los datos permiten eliminar
actividades que no son propias de la actividad muscular. Algunas de estas interferencias
como las ocasionadas por el desplazamiento o desconexion de electrodos, de bajas frecuen-
cias (0− 20Hz) y por otro lado por senales biologicas durante la grabacion de la actividad
muscular (ruido producido por el sistema gastrointestinal, las funciones cardıacas) [Arendt-
Nielsen et al., 2008], las cuales tienen la mayor potencia espectral en una banda de frecuencia
alrededor de los 10Hz − 25Hz (complejo QRS), mientras que la actividad electrica gastrica
de los seres humanos es, aproximadamente, de tres ciclos por minuto (0,05Hz) [Silva and
Rojas, 2010,Rojas Ruiz et al., 2017]. Por otro lado, las senales electromiografıas generalmen-
te presentan componentes desde 5Hz − 500Hz con una energıa dominante en el rango de
50− 150Hz [Cifuentes Gonzalez, 2012].
Teniendo en cuenta lo anterior, la correcta aplicacion de filtros digitales permite reducir en
gran medida la interferencia generada por la actividad biologica de otros organos, limitando
el ancho de banda a un rango que asegure que la informacion contenida corresponde en su
mayorıa a EMG. Ası pues, entendiendo que las fuentes de interferencias biologicas descritas
anteriormente afectan una banda especifica de frecuencias compartidas con la senal muscular
(entre 0,05 y 25Hz), se decidio fijar un rango comprendido entre 20Hz - 350Hz para limitar
el efecto de las mismas y retener la mayor cantidad de informacion relacionada con la acti-
vacion muscular. Para evaluar las opciones de filtrado, se implementaron diferentes filtros,
incluyendo Butterworth, Chebyshev y Elıptico. A partir de la naturaleza de la senal,
ciertos criterios tales como el orden y configuracion del filtro, en conjunto con las frecuencias
de corte de interes, permitiran un filtrado correcto en los puntos de utilidad de la senal [Gila
et al., 2009].
Le evaluacion de los diferentes filtros usados se hace de manera cualitativa y cuantitativa,
facilitando la seleccion del optimo para la aplicacion. Esto se lleva a cabo inicialmente al
comparar los resultados tras aplicar cada tipo de filtro en las senales HD-EMG y evaluar
sus espectros de amplitudes de potencia, encontrando diferencias como las observadas en la
figura 5-9. Ademas, esta descripcion a traves del espectro de potencia permite evidenciar
el efecto de la frecuencia de 50Hz y sus componentes armonicos, inducidos por la red de
distribucion electrica.
Una vez implementado el filtro elıptico, se evidencian potencias en frecuencias inferiores a
los 20Hz. Caso contrario a los filtros Chebyshev y Butterwoth, de 4to orden, en donde se
visualiza un corte preciso en la banda de 20Hz e incluso con mejor funcionamiento en la
configuracion Butterwoth, tal como se evidencia en la figure 5-9.

5.2 Pre-procesamiento de las senales HD-EMG 35
Figura 5-9.: Espectro de potencia para un canal EMG. Superior izquierda senal EMG ori-
ginal. Superior derecha respuesta a filtro Butterworth. Inferior izquierda Filtro
elıptico. Inferior derecha Filtro Chebyshev.
En terminos de evaluacion cuantitativa se emplea el ındice SNR (Signal-to-Noise Ratio), el
cual indica la relacion que existe entre la potencia de la senal filtrada y la potencia del ruido,
a traves de la ecuacion 5-2, donde [S/N ]in indica la potencia de las frecuencias de la senal
original y [S/N ]out la relacion de ruido presente en la senal, el factor SNR se expresa en
decibelios. En la tabla 5-2 se establece el SNR para cada tipo de filtro con diferentes ordenes.
Se debe tener en cuenta que a mayor magnitud del resultado, indica que el ruido de fondo
es menos perceptible con respecto a la senal filtrada [Jamaluddin et al., 2016].
SNR =
∑nx−10
∑ny−10 [r(x, y)]2∑nx−1
0
∑ny−10 [r(x, y)− t(x, y)]2
=[S/N ]in[S/N ]out
(5-2)
En donde se tiene que r indica la senal original de entrada que es comparada con una
referencia t, para obtener la relacion de ruido y posteriormente el ındice SNR.
A partir del analisis del factor SNR para las senales, descrito en la tabla 5-2, se evidencia el
comportamiento de los filtros disenados a partir de diferentes ordenes (para un pasa-banda
con frecuencias de corte de 20Hz - 350Hz). A medida en que aumenta el orden para los tres
filtros el SNR disminuye. Para el filtro Butterworth dicha reduccion es menor con respecto
a los otros dos filtros, lo que describe su eleccion como mejor opcion de arquitectura de

36 5 Metodologıa
Butterworth Chevyshev Eliptico
Orden 1 28.41 24.19 24.19
Orden 2 28.03 21.77 21.11
Orden 3 27.97 20.32 20.97
Orden 4 27.97 20.66 21.61
.
.
.
.
.
.
.
.
.
.
.
.
Orden 9 27.99 21.35 24.19
Tabla 5-2.: Relacion senal-ruido(SNR)
filtrado. Ademas de la eleccion de la configuracion, se debe encontrar un equilibrio entre el
numero del orden del filtro y su factor SNR, puesto que un orden muy superior (por ejemplo
25 o 50) precipitarıa las bandas de corte a un angulo de 90◦, lo cual introducirıa aun mas
ruido debido a que la ganancia es infinita [Felipe Jaramillo, 2015].
Debido a lo anterior, y segun los resultados del criterio SNR se escogio un filtro Butterworth
de cuarto orden (4to) el cual es capaz de filtrar ruidos comunes (senales electrofisiologicas de
otros organos) [Rojas-Martınez et al., 2017], en la banda de frecuencias previamente estable-
cida, tal como se puede observar en su respuesta en magnitud y fase en la figura 5-10, donde
la mayorıa de la actividad muscular se encuentra desde 20Hz-350Hz, aproximadamente.
5.2.4. Atenuador adaptativo para la reduccion de ruido en 50 Hz y
componentes armonicos.
En la senal de electromiografıa entre la banda de 50-60Hz se encuentra energıa propia de la
actividad muscular, como se observa en la figura 5-11, banda que coincide con la frecuencia
de trabajo de la red de distribucion electrica, por lo cual, no es una buena opcion eliminar
o filtrar los componentes en esta banda de frecuencias ya que se perderıa informacion ca-
racterıstica de la senal EMG [Cifuentes Gonzalez, 2012]. A consecuencia de lo anterior se
empleo un procedimiento para atenuar los componentes en estas bandas de frecuencia y sus
armonicos de forma selectiva. Ya que la base de datos fue adquirida en Europa, es importante
mencionar que los sistemas electricos operan en una frecuencia de 50Hz, es decir que los
armonicos se encontrarıan en multiplos de esta frecuencia especıfica (50Hz, 100Hz, 150Hz
... 300Hz), siendo estos de caracter sinusoidal [Zivanovic and Gonzalez-Izal, 2013].
Para la atenuacion de los componentes de red se identificaron a partir de unas senales si-
nusoidales de referencia [Zivanovic and Gonzalez-Izal, 2013], en donde para cada armonico
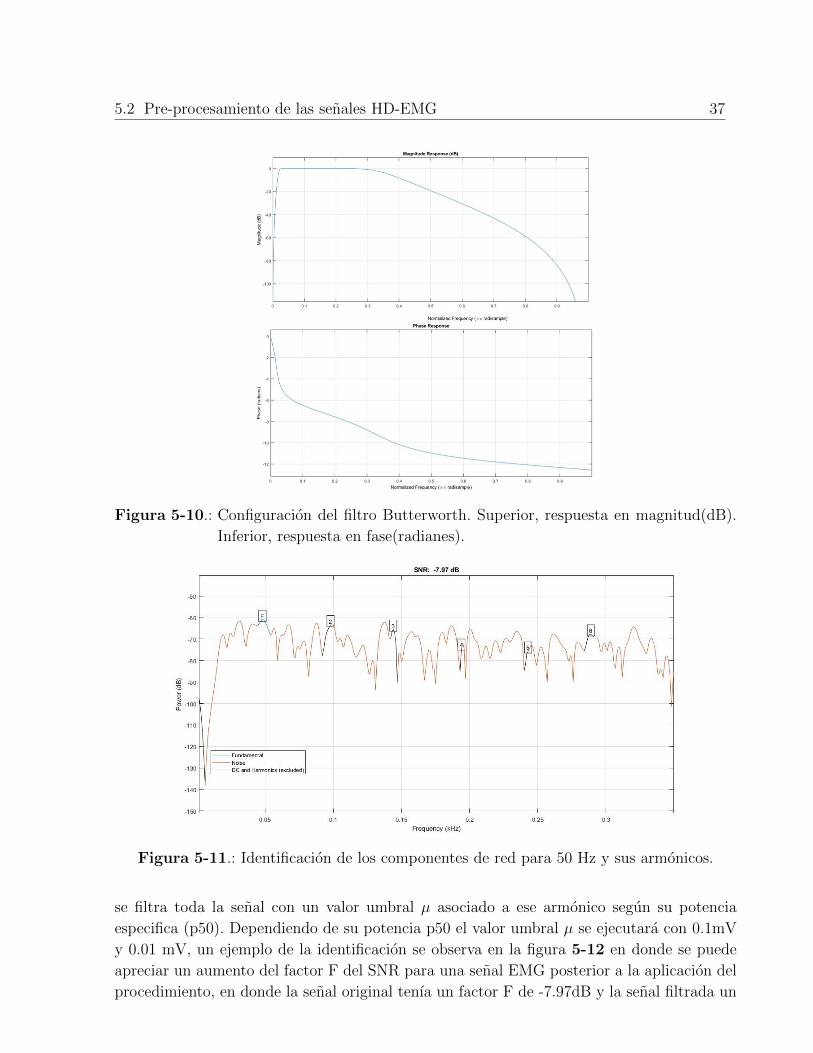
5.2 Pre-procesamiento de las senales HD-EMG 37
Figura 5-10.: Configuracion del filtro Butterworth. Superior, respuesta en magnitud(dB).
Inferior, respuesta en fase(radianes).
Figura 5-11.: Identificacion de los componentes de red para 50 Hz y sus armonicos.
se filtra toda la senal con un valor umbral µ asociado a ese armonico segun su potencia
especifica (p50). Dependiendo de su potencia p50 el valor umbral µ se ejecutara con 0.1mV
y 0.01 mV, un ejemplo de la identificacion se observa en la figura 5-12 en donde se puede
apreciar un aumento del factor F del SNR para una senal EMG posterior a la aplicacion del
procedimiento, en donde la senal original tenıa un factor F de -7.97dB y la senal filtrada un

38 5 Metodologıa
valor de -2.80dB, recordando que entre mayor sea la magnitud del factor F, indica un me-
jor rendimiento del filtro debido a la reduccion del ruido de la senal original y la senal filtrada.
Figura 5-12.: Atenuacion de los componentes de red para 50Hz a partir de la implementa-
cion del algoritmo adaptativo.
Teniendo en cuenta el funcionamiento del procedimiento y el ındice SNR mencionado ante-
riormente, en la tabla 5-3 se evidencia el tratamiento de ocho canales de la misma matriz
de electrodos HD-EMG escogidos al azar para verificar el trabajo del atenuador. En donde
se observa que el factor F despues de la implementacion del algoritmo aumenta luego del
procesamiento, indicando que existe un patron en la atenuacion del ruido de 50Hz y sus
armonicos, es importante aclarar que los procesos de filtrado se aplicaron en cada canal de
las matrices de electromiografıa de forma individual.
Indice SNR con atenuador de 50Hz
Canal
HD-EMG
SNR (dB)
Antes de atenuacion
SNR (dB)
Despues de atenuacion
5 -9.617 -2.882
7 -21.739 -14.970
9 -17.513 -12.177
12 -19.341 -9.900
Tabla 5-3.: Atenuaciones para la frecuencia de 50Hz y sus componentes armonicos a partir
del parametro SNR.

5.2 Pre-procesamiento de las senales HD-EMG 39
5.2.5. Eliminacion de canales diferenciales e identificacion de
artefactos
Como se expuso anteriormente, las senales HD-EMG se obtuvieron por medio de cuatro
matrices de electrodos situados en los musculos, como se observa en la figura 5-13 para el
caso del bıceps. Se emplearon dos tamanos de matrices, i.e., una con dimensiones de 6 × 8
electrodos y la otra cuenta con 6 × 12 electrodos, en configuracion bipolar diferencial que
realiza la adquisicion de senal de EMG que se obtiene es el resultado de la diferencia entre
dos canales. Por lo tanto, si espacialmente se encuentra un electrodo cerca del otro, sus am-
plitudes no varıan significativamente y la senal que adquieren es similar y correspondiente al
grupo muscular que sensan en cuestion [Mohr et al., 2018]. Pero, si la distancia fısica entre
ambos es significativa, estarıan sensando senales cuyas amplitudes varıan significativamen-
te y por consecuente esos electrodos tendrıan valores muy altos que no corresponden a las
mismas senales musculares. Por esta razon, fue necesario eliminar todos los canales de la
ultima fila de la matriz de electrodos, pues tienen como par diferencial a electrodos situa-
dos a distancias considerables. Lo anterior genera una disminucion en la resolucion a 5 × 8
electrodos y 5 × 12 electrodos. Un ejemplo de la representacion espacial de los electrodos
se observa en la figura 5-13, donde el electrodo marcado con 6 tiene una distancia espacial
considerable con su par diferencial 7, obligando a su eliminacion de la matriz de informacion.
Figura 5-13.: Visualizacion de canales en una matriz de electrodos con una resolucion de
6× 8.
Posterior a la eliminacion de los canales diferenciales se procedio a identificar los canales

40 5 Metodologıa
que sean fuentes de artefactos dentro de la matriz de electrodos, ya que teniendo en cuenta
que los movimientos dinamicos suponen mayor movimiento en los musculos, puede ocurrir
que durante la adquisicion de las senales algun electrodo se desconecte o desplace dando
paso a interferencias e informacion erronea [Quintero Rincon et al., 2012,Nazmi et al., 2016],
como las evidenciadas en la figura 5-14, donde el canal 7 (CH7) tiene niveles de voltaje
equiparablemente distintos, lo que se puede considerar como artefacto.
Figura 5-14.: Visualizacion de senal con canales artefactos.
Figura 5-15.: Representacion de matriz con canales artefactos y umbralizacion de filtro
Hampel.
Para la identificacion y eliminacion de canales artefactos hay que tener en cuenta que al
ser una matriz de electrodos se deben considerar los canales vecinos al momento de realizar
la identificacion, por lo cual se implemento un filtro Hampel, el cual se caracteriza por ser
no lineal y permitir encontrar valores atıpicos dentro de una secuencia de senales o en este
caso canales contiguos [Quintero Rincon et al., 2012]. Durante la identificacion de los canales
artefactos se tuvieron en cuenta ciertos parametros, dentro de los cuales estan: la mediana
del valor RMS de todos los canales en la matriz de electrodos y la desviacion absoluta de
la mediana(MAD) de los canales vecinos, evaluando y comparando canal por canal estos
parametros de discriminacion en la matriz de electrodos. De tal forma, se asegura que no
hay informacion sesgada de EMG al identificar canales como artefactos ya que es crucial
saber distinguir cuando un artefacto es de origen fisiologico y cuando es de origen tecnico

5.3 Etapa I. Mapas de activacion 41
(figura 5-15). Al identificar canales artefactos se pueden reconocen aquellos canales que
cuentan con valores de amplitud altos que estan relacionados especıficamente con la actividad
muscular [Quintero Rincon et al., 2012].
5.3. Etapa I. Mapas de activacion
Consecuente a que las senales de HD-EMG fueron tratadas, sincronizadas y se identificaron
los artefactos, se procede a construir los mapas de activacion usando variables propias de
la senal, que han sido reportadas previamente en el estado-del- arte, tales como el valor
cuadratico medio (RMS) de la senal EMG [Jordanic, 2017], la Desviacion absoluta de la me-
dia (MNAD) y Frecuencia Mediana (MDF), las ecuaciones se observan en 4-1, seccion marco
teorico. Para calcular las variables anteriormente mencionadas se segmentaron las senales a
partir de ventanas temporales en las secciones en donde hay un evento de desplazamiento
especıfico, es decir, los movimientos dinamicos etiquetados desde la elaboracion de la base
de datos. Posteriormente, la senal es dividida en subventanas, en donde cada una de ellas
equivaldrıa a un pıxel en el mapa de activacion, como se observa en la figura 5-16. Se debe
tener en cuenta que la primer subventana de cada canal, ordenadas espacialmente segun la
matriz de electrodos, equivalen a una imagen de la activacion muscular en un instante de
tiempo especıfico [Arendt-Nielsen et al., 2008]. La segunda subventana construye un mapa
de activacion muscular consecuente de la anterior activacion, y ası sucesivamente hasta la
cantidad de subventanas creadas (la cantidad de imagenes de activacion muscular es equi-
valente al numero de subventanas).
Sin embargo, entendiendo que el resultado de los mapas de activacion no solo depende de la
variable que se usa para determinar el valor de ıntensidad del pixel”, sino tambien del ancho
de la sub-ventana donde se calcula la misma, se variaron los anchos de las subventanas, con-
siderando diferentes cantidades de muestras o diferentes magnitudes de tiempo. Debido a la
naturaleza de las senales HD-EMG y la rapidez de algunos desplazamientos, diferentes inves-
tigaciones describen que para poder capturar el inicio de la activacion muscular el tamano
de las ventanas debe ser de 100ms como mınimo [Scheme and Englehart, 2011] puesto que,
segun estos estudios el tamano de la ventana afecta directamente el rendimiento durante la
clasificacion [Romo et al., 2007]. En trabajos anteriores [Orozco Gutierrez et al., 2005,Rojas-
Martınez et al., 2017] se han empleado ventanas de 250ms y 400ms, lo que equivale a 512 y
400 muestras para una frecuencia de muestreo de 2048Hz y 1000Hz respectivamente, siendo
esto un punto de referencia.
Teniendo en cuenta lo anterior, se procedio a construir mapas de activacion a partir de las 3
variables anteriormente mencionadas (RMS, MNAD, MDF), variando los tamanos de venta-
na entre 300, 400, 512 y 600 muestras (146, 195, 250 y 292 ms, respectivamente) para poder
determinar cual parametro podrıa aportar informacion consistente durante la contraccion

42 5 Metodologıa
Figura 5-16.: Proceso de construccion de los mapas de activacion muscular, a partir de la
senal HD-EMG.
muscular, teniendo en cuenta los movimientos y los musculos. Al tener una gran cantidad
de imagenes con diferentes variables a nivel temporal y frecuencial, se realizo un analisis de
similitud entre las variables calculadas y el tamano de las ventanas, con el fin de encontrar la
variable y tamano de ventana con mayor semejanza entre las imagenes HD-EMG para cada
movimiento.
En primera instancia, se definieron las metricas de similitud a implementar para la discri-
minacion de los datos obtenidos a partir de las variables RMS, MDF, MNAD calculados
con los tamanos de ventanas mencionados anteriormente, los cuales componen los mapas de
activacion muscular. Las metricas de similitud empleadas fueron la Distancia Euclidiana, el
Coeficiente de Correlacion de Pearson, la Distancia entre Histogramas y el Indice de Simi-
litud Estructural (SSIM), todos ellos metodos de medicion que permiten evaluar la relacion
entre imagenes.
5.3 Etapa I. Mapas de activacion 43
Distancia Euclidiana
D(x, y) =
√√√√ t=1∑T
(xit − xjt)2 (5-3)
Permite evaluar la similitud entre dos elementos simetricos, como por ejemplo, image-
nes, a partir de las distancias entre los puntos que conforman los objetos, como se
observa en la ecuacion 5-3. Se espera obtener valores cercanos a 0, lo que indica que la
similitud es mayor [Brinez de Leon et al., 2013].
Coeficiente de Correlacion de Pearson(Corr)
Una de las propiedades del coeficiente de correlacion es que permite medir el grado de
asociacion lineal entre dos variables por medio de la ecuacion 5-4, se tienen dos tipos
de relaciones: positiva(Correlacion directa) y negativa(Correlacion indirecta), tomando
ası valores entre -1 y +1 [Gila et al., 2009], especıficamente para el estudio en senales
biologicas se tiene que una correlacion por encima de 0,6 es buen indicador de relacion
entre las variables [Stango et al., 2015].
Corr(x, y) =σ(X, Y )
σ(X) ∗ σ(Y ))(5-4)
En donde se tiene la correlacion Corr como el cociente entre la covarianza de X y Y
y la desviacion tıpica de cada variable.
Distancia entre Histogramas
Permite comparar las distribuciones entre dos variables con el fin de evaluar la proximi-
dad que existe [Brinez de Leon et al., 2013]. Su interpretacion es similar a la Distancia
Euclidiana, entre mas cercano sea su valor a 0, indica una mayor similitud.
dHist(H1, H2) =
√1√
H1H2N2
∑i
√H1(i)H2(i) (5-5)
En 5-5 en donde H1 y H2 son los histogramas a comparar y H1, H2 representan el
promedio de los histogramas.
Indice de similitud estructural(SSIM)
Por ultimo, el ındice de similitud estructural se define como un metodo para medir
la similitud entre dos imagenes basandose en tres medidas que son: la luminancia,
contraste y estructura [Wang et al., 2004].

44 5 Metodologıa
SSIM(x, y) = [I(x, y)α · C(x, y)β · S(x, y)γ] (5-6)
Se tiene en la ecuacion 5-6, I iluminancia, C contraste y S Estructura ponderadas,
obteniendo el SSIM entre Imagen x y y. Si el valor obtenido es igual a 1, indica una
similitud exacta.
Considerando lo anterior, la eleccion de la variable de construccion de los mapas de activa-
cion y ancho de sub-ventana se lleva a cabo usando tablas de similitud de variables, para
encontrar la relacion entre las imagenes del mismo movimiento y el mismo musculo, variando
el tamano de ventana y la variable de construccion de los mapas (RMS, MDF, MNAD)1.
Ademas es importante considerar que las imagenes que se analizaron fueron tomadas del
mismo movimiento y mismo musculo, como se menciona anteriormente, y se vario el ciclo en
donde se ejecuto el movimiento. Por medio de esta evaluacion se obtuvo el tamano de ven-
tana y la variable para construir los mapas de activacion para posteriormente ser empleados
en la clasificacion.
5.3.1. Procesamiento de los mapas de activacion
Al construir los mapas de activacion, previamente se eliminaron los canales identificados
como artefactos, por lo tanto es necesario recuperar informacion de los canales eliminados,
los cuales representan pixeles en la imagen. Debido a esto se implementa una interpolacion a
partir de la informacion de los canales vecinos dentro de la superficie de activacion, esto con
el fin de simular la actividad muscular eliminada a causa del canal artefacto; cabe mencio-
nar que por medio a la interpolacion, esta informacion serıa similar a la actividad muscular
original.
Se empleo una interpolacion cubica, basada en la triangulacion de los datos para hallar el
dato faltante [Rojas-Martınez et al., 2012]. La interpolacion cubica basada en triangulos
funciona creando una red de triangulos entre el pıxel de interes y sus pıxeles vecinos. Dichos
triangulos generan circunferencias circunscritas en cada vertice del triangulo. Estas circunfe-
rencias circunscritas deben estar contenidas en los vertices de los triangulos, y ningun vertice
debe estar contenido en ninguna de las circunferencias. Los vertices se tienen que ajustar
para que no logren ingresar a otras circunferencias de otros vertices. Por lo tanto, las magni-
tudes de los triangulos varıan para ajustarse a esta condicion. El valor del pıxel de interes se
halla cuando todos los triangulos generados por los pıxeles vecinos se hayan ajustado bajo
1La totalidad de las tablas de similitud calculadas se encuentran en la seccion de anexos A. En dicha
seccion, se encuentran los calculos variando el tamano de ventana, la variable de construccion, diferentes
movimientos y diferentes musculos.

5.3 Etapa I. Mapas de activacion 45
dicha condicion, como ejemplo se tiene la figura 5-17 [Alonazi et al., 2018].
Figura 5-17.: Triangulacion cubica basada en triangulos. Adaptado de [Alonazi et al., 2018].
Por medio de esta interpolacion se obtuvo una superficie de activacion homogenea, debido
a que en las fibras musculares los cambios de voltaje durante una contraccion son general-
mente niveles bajos. En la figura 5-18 se observa un ejemplo de los resultados de cada etapa
del proceso de construccion y procesamiento en el mapa de activacion, donde el panel a)
evidencia la influencia del canal diferencial en la matriz de electrodos (como se sustento en
la seccion 5.2.5, ya que es evidente la presencia de valores atıpicos con una amplitud que
sobresale frente a los pıxeles vecinos.
Adicionalmente, al visualizar el artefacto que se encuentra en la figura 5-18, imagen b),
este se puede identificar como pixeles con altos valores de intensidad incongruentes con la
amplitud de activaciones musculares [Watanabe et al., 2015], ya que la amplitud de una con-
traccion debe ser similar dentro de un mismo grupo muscular [Rojas-Martınez et al., 2012].
Es decir, pueden existir diferencias entre grupos musculares pero no diferencias abruptas
como se observa en la imagen c), en donde, al eliminar e interpolar el artefacto de la imagen
b), se pueden apreciar las verdaderas activaciones de los grupos musculares (la escala de la
imagen b era de 0,08 debido al artefacto, al eliminarlo, se reduce a 0,04, pudiendo apreciar
las dos regiones de la activacion muscular). Teniendo en cuenta esto, los artefactos impiden
una correcta visualizacion de las activaciones musculares que se llevan a cabo durante los
movimientos dinamicos, razon por la cual se deben procesar las imagenes para eliminar di-
chos elementos.
Finalmente, se realizaron dos procesos adicionales: primero, se procedio a aplicar un filtro
de mediana sobre la imagen, esto con el fin de eliminar diferencias o huecos entre las pe-
quenas regiones de activacion. Segundo, se transformo el espacio de los datos aritmeticos a
un espacio logarıtmico, esto debido a que algunas intensidades de las activaciones musculares
ocurren con una baja amplitud, pero, siguen siendo significativas para el reconocimiento de
la intencion y direccion del movimiento. Por lo tanto, en un espacio logarıtmico se pueden
visualizar estas pequenas variaciones de la actividad muscular [Farina and Falla, 2008].

46 5 Metodologıa
Figura 5-18.: Visualizacion del procesamiento de los mapas de activacion. a)Mapa de ac-
tivacion con canal diferencial, b) Identificacion de artefactos, c)Interpolacion
por triangulacion cubica de los artefactos, d) mapa de activacion filtrado en
escala logarıtmica.
Por ultimo se proyectaron los mapas de activacion obteniendo las superficies correspondien-
tes que se observan en la figura 5-19, donde para la imagen a) se puede observar en la esquina
inferior derecha la presencia de un canal artefacto ademas de los canales diferenciales. Al
eliminar los canales diferenciales se obtiene la imagen b) en donde se aprecia una reduccion
de resolucion tıpica por haber eliminado dichos canales.
Posteriormente, al eliminar el artefacto senalado en la imagen b), se obtiene como resultado
la imagen c) en donde se pueden evidenciar una superficie acorde a las contracciones muscu-
lares, para este caso especıfico. La finalidad del procesamiento que se realizo sobre los mapas
de activacion, fue obtener una superficie homogenea, la cual es acorde con lo que ocurre a
nivel muscular, ya que fisiologicamente las fibras musculares se activan dependiendo de la
fuerza e intencion de movimiento, dando como respuesta una superficie uniforme con ligeras
diferencias en la zona de activacion [Ghaderi and Marateb, 2017].

5.4 Etapa II. Extraccion de caracterısticas de los mapas de activacion 47
Figura 5-19.: Superficie de los mapas de activacion. a) Visualizacion de canal diferen-
cial(amplitud alta), b)Superficie con presencia de artefacto, c) interpolacion
de la superficie, d) Filtrado de superficie y transformacion a escala logarıtmi-
ca.
5.4. Etapa II. Extraccion de caracterısticas de los mapas
de activacion
Una vez se construyeron los mapas de activacion, se extrajeron caracterısticas espaciales
para las contracciones dinamicas, empleando la segmentacion de las senales de posicion. Las
caracterısticas espaciales estan directamente relacionadas con la propagacion de los poten-
ciales de accion y por ende con la direccionalidad de los movimientos, dependiendo de los
grupos musculares que se activen. Por lo tanto, es primordial que las caracterısticas extraıdas
tengan relacion con una dimension espacial. Se escogieron los seis movimientos relacionados
en la figura 5-20, debido a que, son movimientos opuestos en terminos de direccionalidad.
Ademas, se tiene en cuenta que para el desarrollo de este proyecto de investigacion se planteo
el reconocimiento y clasificacion de al menos seis movimientos como requerimiento.

48 5 Metodologıa
Figura 5-20.: Movimientos seleccionados para la extraccion de caracterısticas.
Como se observa en la figura 5-20, los movimientos seleccionados se definen de la siguiente
manera: Movimiento hacia la derecha(Clase 1) 1. Movimiento hacia la izquierda(Clase 2) 9.
Movimiento hacia diagonal superior derecha(Clase 3) 3. Movimiento hacia diagonal inferior
izquierda(Clase 4) 11. Movimiento hacia el frente(Clase 5) 5 y Movimiento hacia atras(Clase
6) 13.
Observando los mapas de activacion que se generan para cada movimiento, se puede eviden-
ciar un cambio en la region de activacion tanto en el area como en la distribucion(ver figura
5-21). Propiedad que se espera aprovechar para diferenciar los movimientos por medio de
las caracterısticas, determinando una agrupacion de caracterısticas de tal forma que permita
describir la distribucion espacial de los musculos, y por ende, su direccionalidad [Farina and
Falla, 2008,Stango et al., 2015].
Se puede observar en los mapas de activacion que existe alto contraste entre la zona de
activacion y el fondo, debido a que hay una concentracion de pıxeles con mayor valor. Por
lo cual se procedio a realizar una segmentacion basada en la similitud [Jeyalaksshmi and
Prasanna, 2017], obteniendo la imagen binaria a partir del valor medio, la ejemplificacion de
este proceso se puede observar en la figura 5-22, la region segmentada en dos movimientos
distintos, en donde la region de activacion es similar, pero los niveles de intensidad varıan
dentro de la misma region, lo que se refleja en el centro de gravedad, con una tendencia hacia
la izquierda para a), y una tendencia hacia la derecha para b), en el caso de la orientacion
este parametro varıa dependiendo de la zona de activacion segmentada.
Como se nombro anteriormente, se realizo una segmentacion que permitio extraer y calcular
las caracterısticas basadas en los mapas de activacion. Esta segmentacion permite identificar

5.4 Etapa II. Extraccion de caracterısticas de los mapas de activacion 49
Figura 5-21.: Mapas de activacion para las seis direcciones de movimiento en musculo tra-
pecio, del centro a Derecha, Izquierda, Diagonal superior derecha, Diagonal
inferior izquierda, adelante y atras.
la zona de activacion, la cual contiene la concentracion de pıxeles que se activan, esto a nivel
del sistema biologico, refiere a las celulas que se reclutan por seccion muscular para llevar
a cabo el movimiento requerido, una ventaja que permite discriminar la direccionalidad de
movimiento [Farina and Falla, 2008], dentro de las caracterısticas se encuentran las mencio-
nadas a continuacion.
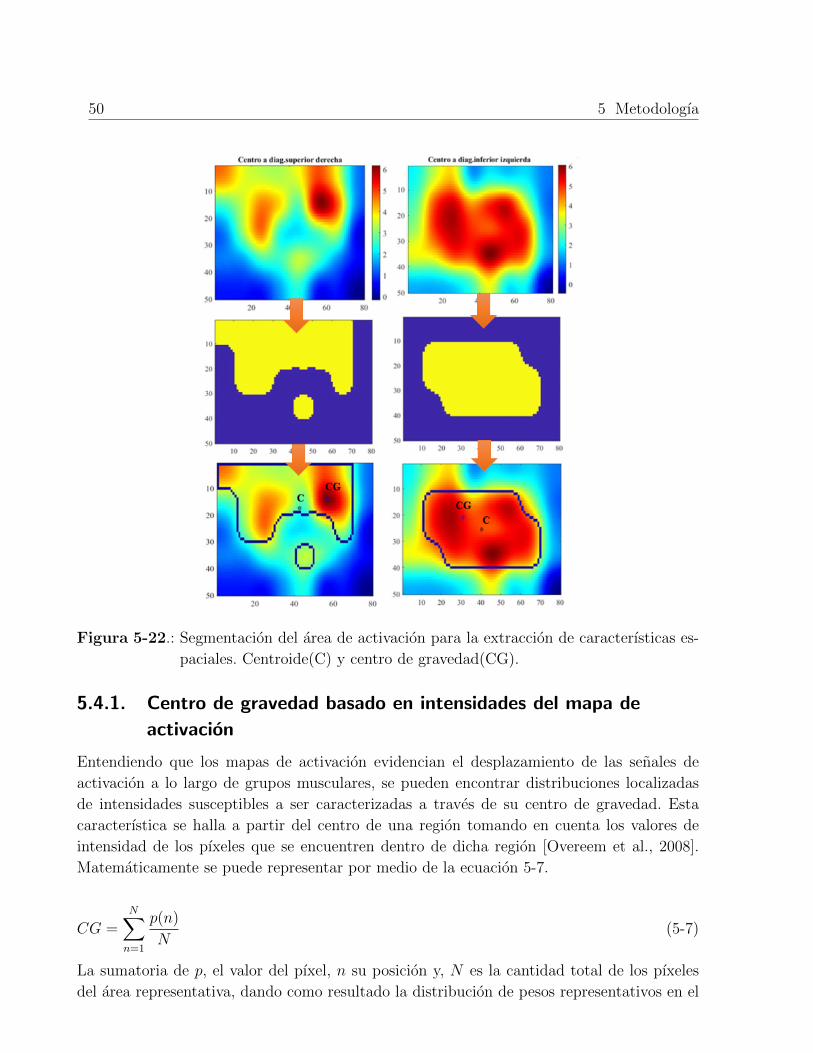
50 5 Metodologıa
Figura 5-22.: Segmentacion del area de activacion para la extraccion de caracterısticas es-
paciales. Centroide(C) y centro de gravedad(CG).
5.4.1. Centro de gravedad basado en intensidades del mapa de
activacion
Entendiendo que los mapas de activacion evidencian el desplazamiento de las senales de
activacion a lo largo de grupos musculares, se pueden encontrar distribuciones localizadas
de intensidades susceptibles a ser caracterizadas a traves de su centro de gravedad. Esta
caracterıstica se halla a partir del centro de una region tomando en cuenta los valores de
intensidad de los pıxeles que se encuentren dentro de dicha region [Overeem et al., 2008].
Matematicamente se puede representar por medio de la ecuacion 5-7.
CG =N∑n=1
p(n)
N(5-7)
La sumatoria de p, el valor del pıxel, n su posicion y, N es la cantidad total de los pıxeles
del area representativa, dando como resultado la distribucion de pesos representativos en el

5.4 Etapa II. Extraccion de caracterısticas de los mapas de activacion 51
area de activacion. El centro de gravedad se representa por coordenadas x y y, por lo que
en el vector de caracterısticas este aporte ocuparıa 2 posiciones, la componente del centro
de gravedad en cada eje coordenado (CGX, CGY ).
5.4.2. Centroide
A diferencia del centro de gravedad, el centroide permite obtener el centro de un area sin
tener en cuenta los valores de intensidad de los pıxeles [Quinayas-Burgos and Gaviria-Lopez,
2015]. Pueden existir dos o mas centroides en una imagen, por lo que se calculo el centroide
global de la imagen. Puede representar, en una consecucion de imagenes, el desplazamiento
de dicha caracterıstica debido al desplazamiento de la activacion muscular. El centroide se
representa por coordenadas x y y, por lo que al igual que la caracterıstica anterior puede ser
visto como un vector de dos posiciones que describe el centroide de un mapa de activacion.
5.4.3. Orientacion de las zonas de activacion muscular
Por medio de la propiedad de orientacion se obtuvo el angulo entre el eje mayor del elipsoi-
de inscrito en la region de activacion y la horizontal del mapa de activacion, anteriormente
segmentado. Los valores de este escalar estan comprendidos entre −90 y 90 grados de acuer-
do con la distribucion espacial de las activaciones obtenidas tras ejecutar la segmentacion
descrita al inicio de la seccion, como se puede observar en la figura 5-23. Con esta propiedad
se pretende caracterizar orientaciones preferenciales o direcciones especıficas en las cuales la
activacion muscular se lleva a cabo por accion un movimiento.
Figura 5-23.: Ejemplificacion de orientacion. Para este caso, la orientacion indica 93 grados
de inclinacion.
5.4.4. Intensidad mediana
Finalmente, en respuesta a la importancia de las intensidades de los mapas de activacion se
decide anexar al espacio de caracterısticas un valor que resuma la variabilidad de un mapa
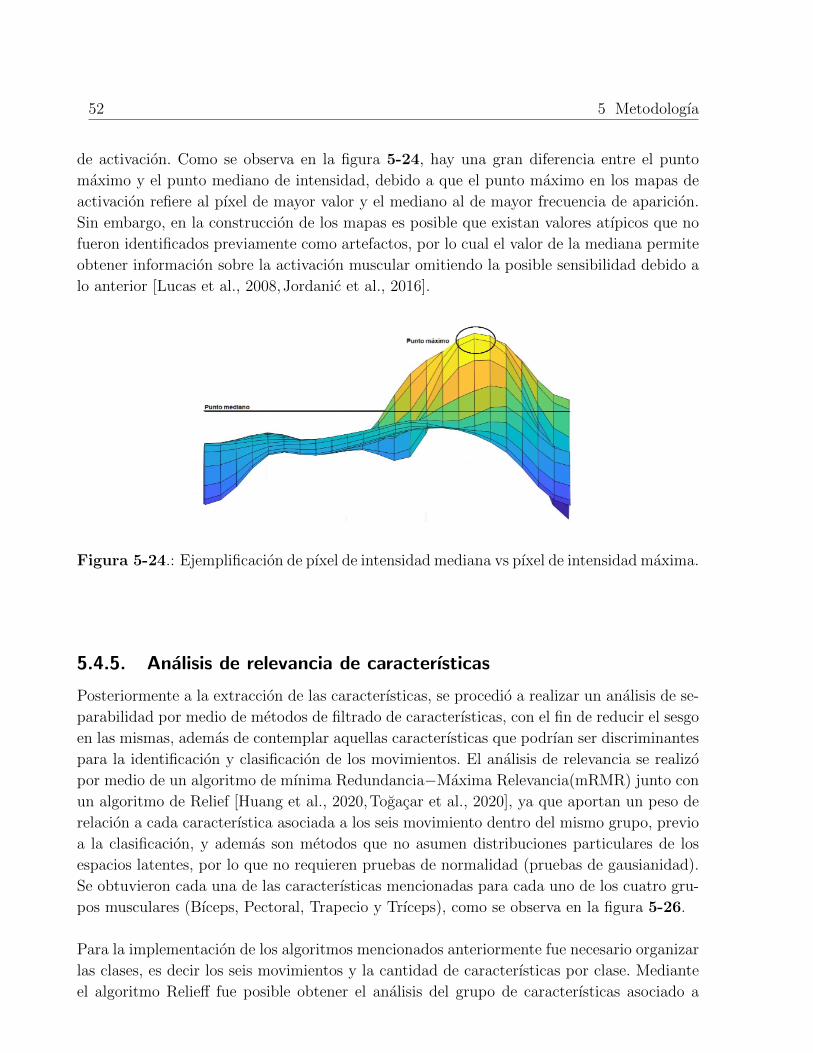
52 5 Metodologıa
de activacion. Como se observa en la figura 5-24, hay una gran diferencia entre el punto
maximo y el punto mediano de intensidad, debido a que el punto maximo en los mapas de
activacion refiere al pıxel de mayor valor y el mediano al de mayor frecuencia de aparicion.
Sin embargo, en la construccion de los mapas es posible que existan valores atıpicos que no
fueron identificados previamente como artefactos, por lo cual el valor de la mediana permite
obtener informacion sobre la activacion muscular omitiendo la posible sensibilidad debido a
lo anterior [Lucas et al., 2008,Jordanic et al., 2016].
Figura 5-24.: Ejemplificacion de pıxel de intensidad mediana vs pıxel de intensidad maxima.
5.4.5. Analisis de relevancia de caracterısticas
Posteriormente a la extraccion de las caracterısticas, se procedio a realizar un analisis de se-
parabilidad por medio de metodos de filtrado de caracterısticas, con el fin de reducir el sesgo
en las mismas, ademas de contemplar aquellas caracterısticas que podrıan ser discriminantes
para la identificacion y clasificacion de los movimientos. El analisis de relevancia se realizo
por medio de un algoritmo de mınima Redundancia−Maxima Relevancia(mRMR) junto con
un algoritmo de Relief [Huang et al., 2020,Togacar et al., 2020], ya que aportan un peso de
relacion a cada caracterıstica asociada a los seis movimiento dentro del mismo grupo, previo
a la clasificacion, y ademas son metodos que no asumen distribuciones particulares de los
espacios latentes, por lo que no requieren pruebas de normalidad (pruebas de gausianidad).
Se obtuvieron cada una de las caracterısticas mencionadas para cada uno de los cuatro gru-
pos musculares (Bıceps, Pectoral, Trapecio y Trıceps), como se observa en la figura 5-26.
Para la implementacion de los algoritmos mencionados anteriormente fue necesario organizar
las clases, es decir los seis movimientos y la cantidad de caracterısticas por clase. Mediante
el algoritmo Relieff fue posible obtener el analisis del grupo de caracterısticas asociado a

5.4 Etapa II. Extraccion de caracterısticas de los mapas de activacion 53
Figura 5-25.: Metodo para el analisis de caracterısticas relevantes.
cada clase, de forma que se ordenan las caracterısticas dependiendo de su relevancia, valor
que se asigna por medio de la ecuacion 5-8, en donde para cada iteracion i se evaluan los
vectores de caracterısticas X analizando la clase a la que pertenece mas cercana nearHit
y la clase erronea mas cercana nearMiss, asignando el peso de importancia W a cada
caracterıstica [Huang et al., 2020].
Wi = Wi − (Xi − nearHiti)2 + (Xi − nearMissi)2 (5-8)
Paralelo y en conjunto al analisis Relief se realizo una prueba mRMR, con el fin de obtener
un conjunto de caracterısticas para ser empleadas en la arquitectura de los clasificadores. El
algoritmo mRMR otorga un rango a las caracterısticas basandose en la informacion mutua
I para medir el nivel de similitud entre cada caracterıstica X asociada a su clase Y . Ademas
de tener en cuenta la redundancia IXj;Xj) y el conjunto de caracterısticas [Kaya et al.,
2019,Huang et al., 2020].

54 5 Metodologıa
J = I(Xi;Y ))− β∑jεS
(Xj;Xi) + γ∑jεS
(Xj;Xi|Y ) (5-9)
Una vez se obtuvo el conjunto de caracterısticas por medio de los algoritmos mencionados,
se procedio a realizar un analisis por medio de la visualizacion de boxplot, observando las
mejores caracterısticas en las seis clases. Los boxplot o diagramas de caja facilitan la eviden-
cia de la distribucion de los datos para las diferentes caracterısticas espaciales con respecto a
los musculos y los diferentes movimientos. A partir de su interpretacion, se puede reconocer
la tendencia de los datos por medio de la visualizacion del tamano de la caja y la longitud
de sus bigotes [Sayyadi Shahraki and Zahiri, 2021].
Como segunda evaluacion cualitativa, se implementaron matrices de dispersion con la fina-
lidad de observar la interaccion de las caracterısticas en un mismo espacio y observar la
separabilidad entre las clases(movimientos). Dependiendo del comportamiento de las carac-
terısticas que se usaron, la separabilidad podra ser lineal o compleja. Para algunos diagramas
de dispersion, se puede evidenciar que las clases pueden ser separables linealmente, mientras
que para otra configuracion de caracterısticas se requerirıa un metodo de clasificacion diferen-
te. Cabe resaltar, que a partir del analisis de los diagramas de dispersion se puede establecer
una caracterıstica o grupo de caracterısticas como discriminantes para la diferenciacion de
las clases [Febrer, 2014].
5.5. Etapa III. Clasificacion de movimientos y seleccion
de metodos de clasificacion
Al finalizar la etapa anterior, en donde se seleccionaron y analizaron las caracterısticas se
procedio a ejecutar la tarea de clasificacion o diferenciacion de los movimientos conteni-
dos en la base de datos relacionada anteriormente, limitando el ejercicio a 6 movimientos,
como se observa en la figura 5-26, se observa el movimiento o clase 1, referente al desplaza-
miento desde el centro hacia la derecha(Posicion 1), en este orden de ideas los movimientos
dinamicos empleados(Las clases) se definen desde el centro, hacia posicion 1, 2, 3, 5, 6 y 7
con la finalidad de observar el comportamiento de estos movimientos antagonicos. Para este
proceso de clasificacion inicialmente se usaron 4 metodos, incluyendo maquinas de sopor-
te vectorial(SVM), Redes neuronales(NN), Vecinos cercanos(k-NN) y analisis discriminante
lineal(LDA), todos ellos ampliamente reportados en publicaciones relacionadas y los dos ulti-
mos (K-NN, LDA) particularmente implementados por haber sido usados en investigaciones
previas que usan mapas de activacion, y porque ademas su simplicidad propone posibilidad
de uso en aplicaciones finales [Rojas-Martınez et al., 2017,Tkach et al., 2010].
Para la evaluacion de cada clasificador se evaluo el rendimiento cuantificando los aciertos
y fallos en la identificacion de movimientos a partir de una matriz de confusion, donde

5.5 Etapa III. Clasificacion de movimientos y seleccion de metodos de clasificacion 55
Figura 5-26.: Demostracion de movimientos de desplazamiento hacia 1(c1) en trayectoria
indicada para cada sujeto durante el registro de senales HD-EMG.
como se observa en la tabla 5-27, se obtiene la distincion por cada clase del sistema, por
ejemplo la clase 1(c1) pertenece al desplazamiento hacia la derecha, como consecuencia los
Verdaderos positivos(VP) refieren a la cantidad de datos que se clasificaron correctamente
para ese movimiento, los Verdaderos negativos(VN) son los que no pertenecen al movimiento
1 y se clasificaron en otras clases. Por otro lado los falsos negativos(FN) refiere a la cantidad
de clasificaciones erroneas pertenecientes a la clase 1. Finalmente los falsos postivos(FP)
cuantifica los valores que se clasificaron como clase 1 sin pertenecer a esa categorıa [Gallina
et al., 2013].
Figura 5-27.: Matriz de confusion multiclase, ejemplo para clase 1(c1).
A partir de lo anterior se calculan las metricas habituales para este tipo de tarea: Sensibili-
dad(Ecuacion 5-10), precision(5-11) y F1-score(5-13). Finalmente, todas estas metricas de
rendimiento se calculan bajo las siguientes condiciones experimentales:
Sensibilidad =V p
V p+ Fn(5-10)
La sensibilidad cuantifica la cantidad de aciertos para cada clase, en caso que no existan
Falsos Negativos la sensibilidad de la clase seria del 100 %.

56 5 Metodologıa
Precision =V P
V p+ Fp(5-11)
La precision cuantifica los aciertos correctos, es decir cuantos de los casos estimados son
positivos para cada clase.
Exactitud =V p+ V n
Total(5-12)
A diferencia de las anteriores metricas, la exactitud es la probabilidad que tiene el sistema
de forma general de acertar, teniendo en cuenta cuanto clasifico correctamente y cuanto no.
F1− Score =2(sensibilidad)(prescision)
Sensibilidad+ precision(5-13)
Finalmente el F1-Score es un valor que permite relacionar la sensibilidad y precision de la
clasificacion.
5.5.1. Experimento I
Teniendo estos clasificadores como lınea base, en el primer experimento se realizo un proceso
de seleccion de los mejores clasificadores para el cumplimiento del objetivo final de este traba-
jo de grado, la identificacion de movimientos de hombro basado en caracterısticas espaciales.
Durante el proceso de seleccion se comparo el rendimiento de cada uno de los clasificadores
anteriormente mencionados, a partir de la base de datos expuesta al inicio de este capıtulo
se procede a diferenciar 6 movimientos (ver figura 5-20), mediante las caracterısticas pre-
viamente determinadas. Cada metodo de aprendizaje fue multiclase y supervisado, debido
a que se tiene un vector que representa las clases conocidas para cada observacion, es decir
un groundtruth [Lucas et al., 2008,Pan et al., 2015,Phinyomark and Scheme, 2018].
El primer experimento se ejecuto a nivel intra-sujeto, es decir, el modelo de clasificacion
se disena para identificar los movimientos en cada sujeto por separado, a partir de ejem-
plos de sus propias caracterısticas, con la finalidad de observar el comportamiento de cada
sujeto. Adicionalmente en cada sujeto se tiene una distribucion de observaciones por cla-
se no homogenea, el desbalanceo se atribuye a que durante el ejercicio de adquisicion, la
distancia de los movimientos en la trayectoria era diferente, con la finalidad de aportar na-
turalidad durante el protocolo de adquisicion. Con lo anterior, la seleccion de datos para
entrenamiento y para evaluacion se realizo por medio de la tecnica de validacion cruzada
Leave− one− out, asegurando con esto mas cantidad de datos para entrenamiento, bajo la
condicion de desbalanceo descrita.

5.6 Etapa IV. Evaluacion 57
5.6. Etapa IV. Evaluacion
Para la etapa de evaluacion se emplearon las metricas descritas en la Etapa III, con la fina-
lidad de validar el correcto funcionamiento de los clasificadores seleccionados, dejando a un
lado el experimento intra-sujeto y realizando una identificacion generalizada de los 6 movi-
mientos, para todos los sujetos disponibles en un solo conjunto.
Entendiendo la naturaleza multiclase del ejercicio de clasificacion propuesto, se calculan las
metricas para cada uno de los movimientos (cada clase) y se reporta la media junto con
la desviacion estandar, para proporcionar una unica medida que permita evaluar el metodo
propuesto [Saeed et al., 2021]. Adicionalmente, considerando la variabilidad de la base de
datos en terminos de observaciones, y con el objetivo de proporcionar una validacion confiable
del metodo, se disenaron tres experimentos, enlistados a continuacion:
5.6.1. Experimento II: Pruebas de clasificacion descriptores Centro de
gravedad e Intensidad mediana - lınea base de comparacion
Considerando publicaciones previas, donde se propone un metodo de identificacion basado
en caracterısticas espaciales en mapas de activacion, se diseno el experimento II, en donde
se pretende obtener resultados como lınea base y comparar con los resultados de la metodo-
logıa aca propuesta. Para ello se emplearon 2 caracterısticas reportadas por [Rojas-Martınez
et al., 2017], las cuales son Centro de gravedad(CG) y la intensidad mediana(M) del grupo
muscular. De nuevo la evaluacion del rendimiento se lleva a cabo a traves de las metricas pre-
viamente descritas, para establecer un marco homogeneo de comparacion con los resultados
obtenidos con el modelo presentado en este trabajo.
5.6.2. Experimento III: Pruebas de clasificacion Leave-One-Out(LOO)
Una vez se finalizo el experimento II, se llevo a cabo el experimento III y IV. Los resultados
durante estos disenos experimentales se realizaron de forma general para los 8 sujetos, en
5-28, se presenta la cantidad de observaciones por clase y los tipos de validacion, notando
que hay un desbalanceo en las observaciones, ya que como se menciono en la seccion anterior,
la trayectoria durante el protocolo de adquisicion no era el mismo para todas las direcciones
de movimiento. Finalmente en el proceso de re-muestreo se balancearon a 183 observaciones
por cada clase, garantizando que cada sujeto aporte las mismas caracterısticas para cada
experimento de clasificacion.
En el segundo experimento se implementaron los dos clasificadores con mejor desempeno
por medio de una validacion tipo LOO, y con observaciones por clases desbalanceadas, las
pruebas de clasificacion se realizaron antes y despues de la seleccion de caracterısticas como
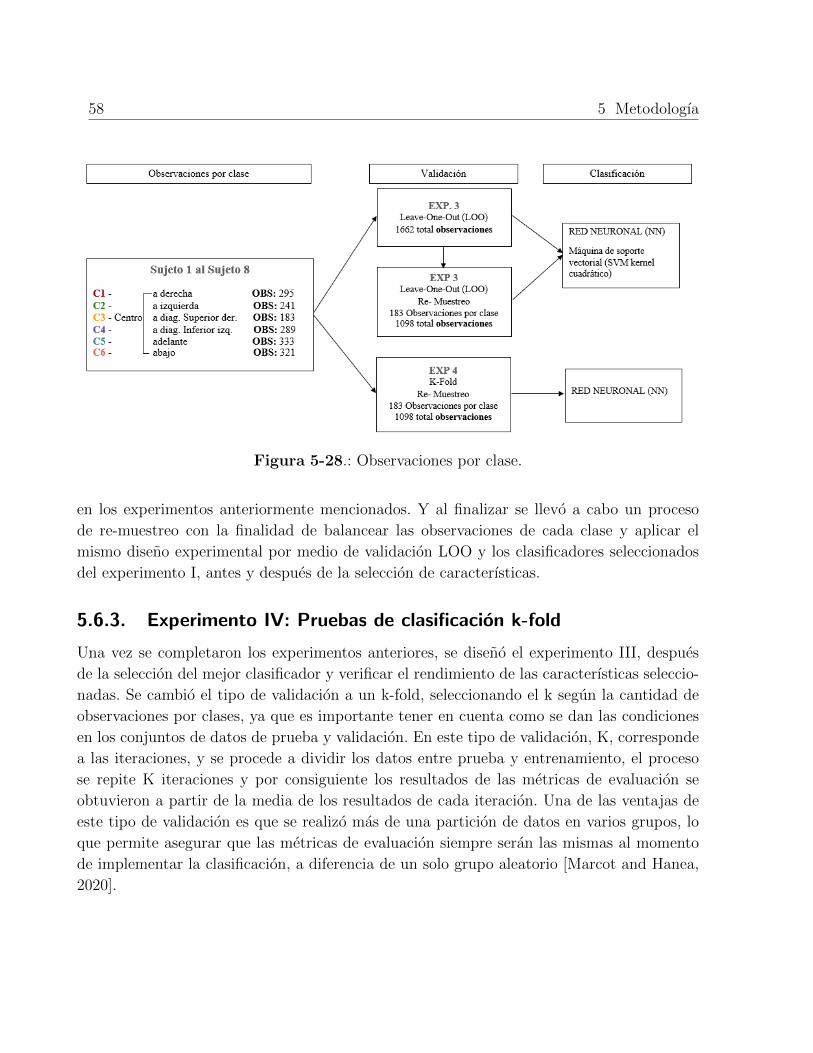
58 5 Metodologıa
Figura 5-28.: Observaciones por clase.
en los experimentos anteriormente mencionados. Y al finalizar se llevo a cabo un proceso
de re-muestreo con la finalidad de balancear las observaciones de cada clase y aplicar el
mismo diseno experimental por medio de validacion LOO y los clasificadores seleccionados
del experimento I, antes y despues de la seleccion de caracterısticas.
5.6.3. Experimento IV: Pruebas de clasificacion k-fold
Una vez se completaron los experimentos anteriores, se diseno el experimento III, despues
de la seleccion del mejor clasificador y verificar el rendimiento de las caracterısticas seleccio-
nadas. Se cambio el tipo de validacion a un k-fold, seleccionando el k segun la cantidad de
observaciones por clases, ya que es importante tener en cuenta como se dan las condiciones
en los conjuntos de datos de prueba y validacion. En este tipo de validacion, K, corresponde
a las iteraciones, y se procede a dividir los datos entre prueba y entrenamiento, el proceso
se repite K iteraciones y por consiguiente los resultados de las metricas de evaluacion se
obtuvieron a partir de la media de los resultados de cada iteracion. Una de las ventajas de
este tipo de validacion es que se realizo mas de una particion de datos en varios grupos, lo
que permite asegurar que las metricas de evaluacion siempre seran las mismas al momento
de implementar la clasificacion, a diferencia de un solo grupo aleatorio [Marcot and Hanea,
2020].

6. Resultados y discusion
Como se menciono en la metodologıa, cada una de las etapas responde a uno de los obje-
tivos especıficos del presente trabajo de grado, ası pues, el presente capıtulo evidencia los
resultados encontrados para cada una de las etapas, describiendo y discutiendo el como los
mismos dan cumplimientos a los objetivos del trabajo.
6.1. Etapa I. Mapas de activacion
Para la primera etapa de la metodologıa relacionada con la construccion de los mapas de
activacion, se procede a variar el tamano de ventana temporal, es decir, la subsegmentacion
de cada canal de las senales de EMG, y la variable de construccion (valor RMS, MNAD,
MDF), para definir la combinacion de estas variables que resulta mas efectiva para la tarea
especificada. Una vez se construyen los mapas de activacion, se realizo un analisis de similitud
por sujeto y grupo muscular, variando unicamente el ciclo de ejecucion de movimiento, como
ejemplo se puede observar en la figura 6-11, los resultados de correlacion de Pearson entre
los mapas de activacion del movimiento 11 en diferente ciclo para la variable RMS.
Figura 6-1.: Tabla de similitud de imagenes con ventana de 400, valor RMS, En Bıceps y
movimiento 11. Resultados para la correlacion de Pearson.
Durante esta etapa de la metodologıa se busca encontrar la variable que represente una
mayor relacion y similitud entre los movimientos. Por lo que se midio la variabilidad de
cada metrica de construccion de los mapas de activacion por medio de tablas de frecuencias
1Para observar resultados de similitud para las demas variables de construccion, ver Anexo 1.

60 6 Resultados y discusion
agrupadas. Como primera medida se calculo la distancia euclidiana entre las imagenes(mapas
de activacion) del mismo movimiento y musculo, para lo cual, se establecio un rango entre
0−5 unidades, teniendo en cuenta que un buen indicador es un valor cercano a 0, lo que
quiere decir que no hay diferencia en la imagenes del mismo movimiento o tiene una alta
semejanza entre ellas. A partir de los resultados anteriores en la tabla 6-1 y teniendo en
cuenta tambien las metricas MDF y MNAD, se obtuvo la tabla 6-1, se puede notar que
para MNAD, con un tamano de ventana de 512 el 70 % de las imagenes tienen una distancia
menor a 5, comparado al valor RMS con un 43, 2 %, siendo el tamano de 512 posiblemente
una buena opcion para la construccion de los mapas de activacion.
Bıceps, Movimiento 11 Tamano de ventana
300 400 512 600
Distancia Euclidiana RMS 0,0 % 33,3 % 43,2 % 33,3 %
MDF 0,0 % 0,0 % 0,0 % 0,0 %
MNAD 55,6 % 74,1 % 71,9 % 90,0 %
Tabla 6-1.: Porcentaje de datos agrupados para el analisis de similitud con Distancia Eu-
clidiana en un rango entre 0 a 0.5.
Otro indicador es el valor promedio de las distancias entre cada tamano de ventana y variable
de construccion, ilustradas en la tabla 6-2, el promedio de las distancias tiende a reducirse
para los tamanos de ventana de 400, 512 y 600 muestras(indica que la distancia entre image-
nes, en promedio, es cada vez menor. Entre menor distancia, es buen indicador), siendo las
variables de construccion RMS y MNAD las que otorgan mayor similitud entre imagenes.
Distancia Euclidiana
Biceps, Movimiento 11 Tamano de ventana
300 400 512 600
RMS Promedio de distancia 5,40 1,14 1,14 1,14
Desviacion Estandar 0,46 0,11 0,11 0,12
Coeficiente de Variacion 0,08 0,09 0,10 0,10
MDF Promedio de distancia 8,06 2,03 1,99 2,02
Desviacion Estandar 0,93 0,15 0,12 0,11
Coeficiente de Variacion 0,12 0,07 0,06 0,05
MNAD Promedio de distancia 1,29 0,93 1,22 0,91
Desviacion Estandar 0,11 0,07 0,05 0,07
Coeficiente de Variacion 0,08 0,08 0,04 0,07
Tabla 6-2.: Metricas estadısticas para el analisis de similitud con Distancia Euclidiana.
El proceso descrito anteriormente se aplico al Coeficiente de Correlacion de Pearson, estable-

6.1 Etapa I. Mapas de activacion 61
ciendo para este caso coeficientes de correlacion mayores a 0,6, ya que en senales biologicas
este valor indica ser buen indicio de correlacion [Stango et al., 2015]). En la tabla 6-3 se
ilustran los porcentajes obtenidos para los diferentes tamanos de ventana y variables de
construccion, se observa la mejor correlacion, con un 85 % para el tamano de ventana de 512
y valor RMS, lo que indica que son los mapas con mayor correlacion.
Bıceps, Movimiento 11 Tamano de ventana
300 400 512 600
Correlacion mayor a 0,6 RMS 0 %* 79,0 % 85,0 % 80,0 %
MDF 31,0 % 27,0 % 25,0 % 16,3 %
MNAD 7,0 % 24,0 % 28,1 % 27,7 %
Nota: *Para todas imagenes con tamano de ventana 300
la correlacion fue a menor 0,1
Tabla 6-3.: Porcentaje de datos agrupados para el analisis de similitud con el Coeficiente
de Correlacion de Pearson.
De igual forma, como en la anterior metrica de similitud, para los tamanos de ventana de
400, 512 y 600 muestras la correlacion es mas alta; soportado por los resultados de metricas
estadısticas en la tabla 6-4, donde se observan coeficientes en promedio de 0,67, 0,68 y 0,66
para tamanos de ventana de 400, 512 y 600 muestras, respectivamente para RMS. Tambien
es importante notar que para MNAD se obtienen coeficientes mayores con valores promedios
de correlacion de 0,71, 0,72 y 0,71 para ventanas de 400, 512 y 600 muestras.
Coeficiente de Correlacion de Pearson
Biceps, Movimiento 11 Tamano de ventana
300 400 512 600
RMS Promedio 0,05 0,67 0,68 0,66
Desviacion Estandar 0,04 0,12 0,11 0,12
Coeficiente de Variacion 0,78 0,17 0,16 0,18
MDF Promedio 0,32 0,19 0,20 0,21
Desviacion Estandar 0,11 0,06 0,05 0,05
Coeficiente de Variacion 0,33 0,33 0,23 0,23
MNAD Promedio 0,05 0,71 0,72 0,71
Desviacion Estandar 0,02 0,07 0,07 0,06
Coeficiente de Variacion 0,48 0,09 0,09 0,09
Tabla 6-4.: Metricas estadısticas para el analisis de similitud con Coeficiente de Correlacion
de Pearson.

62 6 Resultados y discusion
A partir de la implementacion de las metricas Distancia Euclidiana y el Coeficiente de Co-
rrelacion de Pearson, se realizo el primer analisis de similitud entre variables, las cuales
permitieron sustentar la decision para la seleccion de las variables y tamanos de ventana
idoneos, los cuales fueron usados para la construccion de los mapas HD-EMG.
Teniendo en cuenta lo anterior, se descarto el uso de la ventana de 300 muestras, puesto
que no hay una buena relacion entre las imagenes, para la ventana de 600 muestras que,
aunque tiene ındices de similitud similares a las ventanas de 400 y 512 muestras, la cantidad
de imagenes para el entrenamiento y validacion del modelo de clasificacion serıan insufi-
cientes, afectando el rendimiento del algoritmo de identificacion. Ademas, se descarto el uso
de la variable MDF, puesto que, en comparacion con los resultados para los valores RMS
y MNAD, los resultados de similitud respecto a la distancia euclidiana y la correlacion de
Pearson demuestran ser menor en todos los tamanos de ventana.
A partir de los resultados del analisis de anteriormente expresado, se procedio a realizar
nuevamente un analisis de entre las variables de construccion y los tamanos de ventana
escogidos. Este analisis de similitud se realizo con las metricas de Distancia entre Histogramas
e Indice de Similitud Estructural (SSIM). Los resultados calculados se obtuvieron con la
misma metodologıa para el analisis de similitud anterior. En la tabla 6-5 se puede observar,
entre los resultados mas destacados, que la cantidad de imagenes construidas a partir de la
variable RMS con una distancia de histogramas menor a 0,5, fue equivalente a un 57,1 %
para la ventana de 400 muestras y 82,8 % para un tamano de ventana de 512 muestras siendo
un resultado superior comparado a las variables MDF y MNAD.
Trapecio, Movimiento 4 Tamano de ventana
400 512
Distancia entre histogramas RMS 57,1 % 82,8 %
MDF 46,4 % 60,0 %
MNAD 50,0 % 50,0 %
Tabla 6-5.: Porcentaje de datos agrupados para el analisis de similitud con la Distancia
entre Histogramas para una distancia menor a 0,5.
Respecto a los promedios de las distancias entre histogramas, se observa que los mapas de
activacion construidos a partir del valor RMS y 512 muestras tiende a disminuir, lo que
indica una menor diferencia entre los mapas de activacion a partir de esta variable de cons-
truccion, lo que se observa en la tabla 6-6. Sin embargo, tambien se evaluo este indicador
con el Indice de Similitud Estructural.
Al implementar el Indice de Similitud Estructural como metrica de similitud se debe tener
en cuenta que, entre mas cercano sea el resultado a 1 indica que las variables comparten mas

6.1 Etapa I. Mapas de activacion 63
Distancia entre Histogramas
Trapecio,
Movimiento 4
Tamano
de ventana
400 512
RMS Promedio 0,47 0,53
Desviacion Estandar 0,42 0,46
Coeficiente de Variacion 0,9 0,88
MNAD Promedio 0,56 0,56
Desviacion Estandar 0,38 0,41
Coeficiente de Variacion 0,68 0,73
Tabla 6-6.: Metricas estadısticas para el analisis de similitud con la Distancia entre Histo-
gramas para una distancia menor a 0,5.
informacion, mientras que si el resultado es cercano a 0 indica que no existe ningun tipo de
relacion. En la tabla 6-7 se observan los porcentajes de similitud mayores a 0,5. Es evidente
que para la variable de construccion RMS con un tamano de ventana de 512 muestras se
obtuvo un mayor porcentaje en comparacion con la ventana de 400 muestras. Por otro lado,
la variable MNAD obtuvo un mayor porcentaje para ambos tamanos de ventana.
Trıceps, Movimiento 15 Tamano de ventana
400 512
SSIM RMS 38,0 % 67,8 %
MNAD 43,0 % 65,6 %
Tabla 6-7.: Porcentaje de datos agrupados para el analisis de similitud con el Indice de
Similitud Estructural.
Con respecto al promedio de SSIM(tabla 6-8), se puede evidenciar que la variable de cons-
truccion que obtuvo un mayor ındice de similitud fue MNAD, sin embargo es un valor cercano
a la variable RMS, resaltando los resultados realizados con ventanas de 512 muestras.
Teniendo en cuenta los resultados obtenidos al aplicar las cuatro metricas de similitud, se
escogio como variable de construccion el valor RMS, puesto que, ademas de los ındices de
similitud anteriormente evidenciados, tambien permite indicar la amplitud de las contrac-
ciones musculares [Fang et al., 2015]. Por otro lado, para el tamano de ventana idoneo, se
opto por implementar el tamano de ventana de 512 muestras(equivalente a 250ms) para la
construccion de los mapas de activacion. Como resultado de la etapa 1, en la figura 6-2 se
observan los mapas de activacion que se obtuvieron con la variable y tamano de ventana
mencionadas anteriormente en 4 musculos. Es importante mencionar que los mapas de acti-
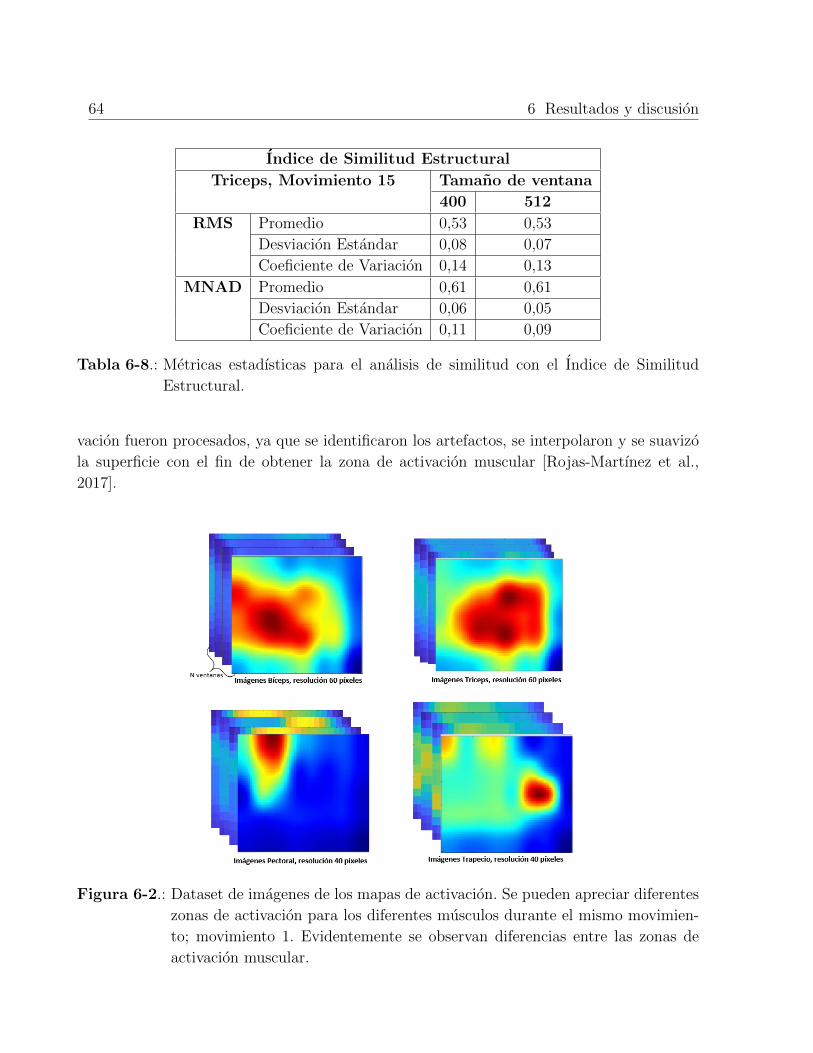
64 6 Resultados y discusion
Indice de Similitud Estructural
Triceps, Movimiento 15 Tamano de ventana
400 512
RMS Promedio 0,53 0,53
Desviacion Estandar 0,08 0,07
Coeficiente de Variacion 0,14 0,13
MNAD Promedio 0,61 0,61
Desviacion Estandar 0,06 0,05
Coeficiente de Variacion 0,11 0,09
Tabla 6-8.: Metricas estadısticas para el analisis de similitud con el Indice de Similitud
Estructural.
vacion fueron procesados, ya que se identificaron los artefactos, se interpolaron y se suavizo
la superficie con el fin de obtener la zona de activacion muscular [Rojas-Martınez et al.,
2017].
Figura 6-2.: Dataset de imagenes de los mapas de activacion. Se pueden apreciar diferentes
zonas de activacion para los diferentes musculos durante el mismo movimien-
to; movimiento 1. Evidentemente se observan diferencias entre las zonas de
activacion muscular.
6.2 Etapa II. Extraccion de caracterısticas de los mapas de activacion 65
6.2. Etapa II. Extraccion de caracterısticas de los mapas
de activacion
Una vez se construyeron los mapas de activacion, se extrajeron las caracterısticas espaciales
asociadas a la zona de activacion segmentada de los 6 movimientos seleccionados, para cada
uno de los 4 grupos musculares, se debe tener en cuenta que se observa el comportamiento
del Centroide y el centro de gravedad en dos coordenadas cartesianas ya que puede estar
posicionado en las mismas coordenadas para un eje(en este caso para el x), pero no es un
evento frecuente que para el eje complementario suceda lo mismo. Esto indica que, el des-
plazamiento del Centroide y el centro de gravedad, en ocasiones, puede estar discriminando
el desplazamiento de la contraccion muscular en un eje unicamente, o bien, en ambos. Para
las caracterısticas y musculos se tiene que:
Centroide coordenada en x (CTx).
Centroide coordenada en y (CTy).
Centro de Gravedad coordenada en x (CGx)
Centro de Gravedad coordenada en y (CGy).
Orientacion de la zona de activacion muscular(O).
Intensidad mediana (M).
Trapecio (TRA).
Trıceps (TRI).
Bıceps (B).
Pectoral (P).
6.2.1. Analisis de relevancia de caracterısticas
A partir de lo anterior se obtuvieron los seis 6 descriptores espaciales por cada uno de los 4
musculos, lo cual permite que cada sujeto se vea caracterizado por un vector de 24 elementos,
producto de la concatenacion de los descriptores anteriormente enlistados. Con este espacio
de caracterısticas de todos los sujetos, se realizan pruebas mRMR y analisis de rango Relieff
en busca de una reduccion de dimensional dad o seleccion de aquellas caracterısticas que
resulten mas discriminantes para los movimientos definidos.

66 6 Resultados y discusion
Los resultados para la seleccion de caracterısticas por medio de mRMR para el sujeto 1
se observan en la figura 6-3, como ejemplo del resultado obtenido tras seguir el paso meto-
dologico propuesto. Para la seleccion de caracterısticas se tuvo en cuenta aquellos predictores
cuyo valor de importancia estuviera por encima de 0, 05, un criterio ampliamente usado para
umbral izar la relevancia el tecnicas de filtrado de espacios latentes. Como se observa en la
figura 6-3 (comportamiento que se repite en la mayorıa de los sujetos), las caracterısticas
que cumplen ese parametro son 13, asociadas en mayor parte al musculo trıceps y trapecio.
El analisis mRMR para uno de los sujetos tomado de forma aleatoria se observa en la figura
6-4, donde se encontro una relacion similar de importancia del grupo de caracterısticas, ya
que las 13 se encuentran por encima de 0, 05 pero en diferente orden y valor de importancia,
sin embargo esto es buen indicador debido a que se hizo posible generalizar el grupo de carac-
terısticas para la clasificacion de movimientos en cada sujeto, cabe resaltar que tambien hay
valores que pueden ser negativos, indicando que esa caracterıstica en particular no aporta
informacion.
Figura 6-3.: Analisis Mınima Redundancia Maxima Relevancia(mRMR) sujeto 1.
Las 24 caracterısticas originales fueron sometidas a una prueba de rango Relieff, con el fin de
medir valor de importancia de cada una de las caracterısticas en 4 sujetos diferentes, inclu-
yendo los 6 movimientos, lo cual permitio obtener la agrupacion de descriptores empleando
dos metodos de seleccion de caracterısticas en conjunto. Como se observa en la tabla 6-9,
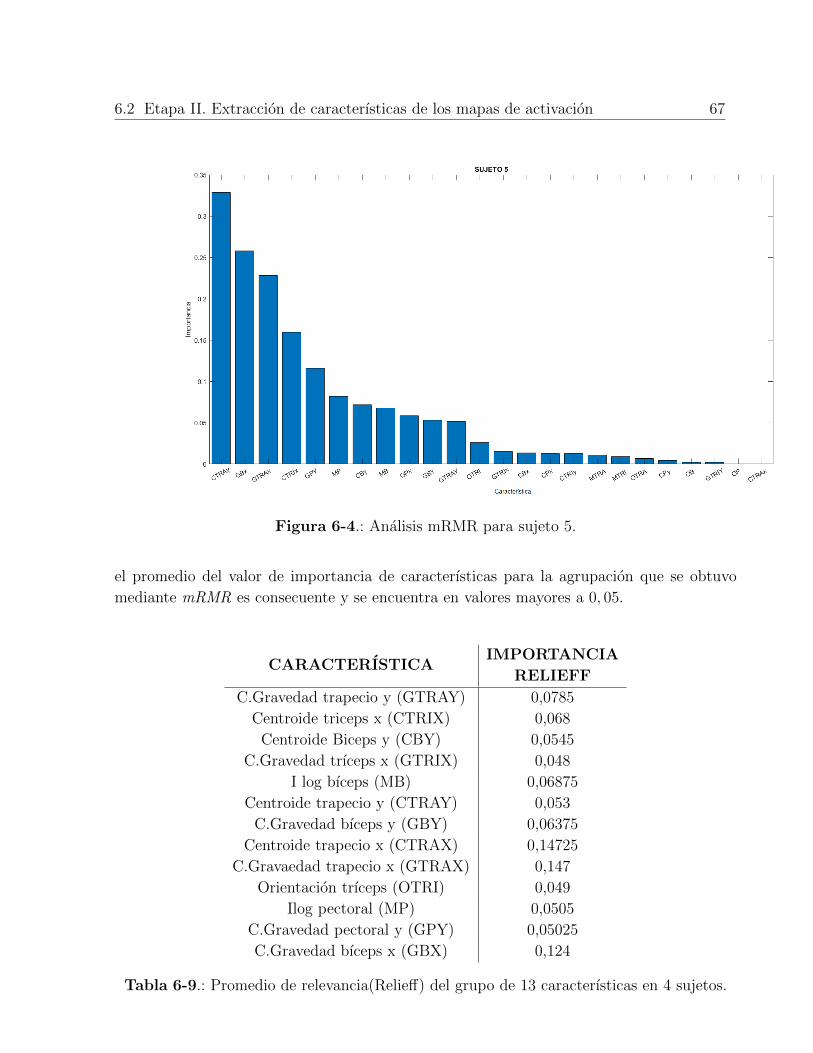
6.2 Etapa II. Extraccion de caracterısticas de los mapas de activacion 67
Figura 6-4.: Analisis mRMR para sujeto 5.
el promedio del valor de importancia de caracterısticas para la agrupacion que se obtuvo
mediante mRMR es consecuente y se encuentra en valores mayores a 0, 05.
CARACTERISTICAIMPORTANCIA
RELIEFF
C.Gravedad trapecio y (GTRAY) 0,0785
Centroide triceps x (CTRIX) 0,068
Centroide Biceps y (CBY) 0,0545
C.Gravedad trıceps x (GTRIX) 0,048
I log bıceps (MB) 0,06875
Centroide trapecio y (CTRAY) 0,053
C.Gravedad bıceps y (GBY) 0,06375
Centroide trapecio x (CTRAX) 0,14725
C.Gravaedad trapecio x (GTRAX) 0,147
Orientacion trıceps (OTRI) 0,049
Ilog pectoral (MP) 0,0505
C.Gravedad pectoral y (GPY) 0,05025
C.Gravedad bıceps x (GBX) 0,124
Tabla 6-9.: Promedio de relevancia(Relieff) del grupo de 13 caracterısticas en 4 sujetos.
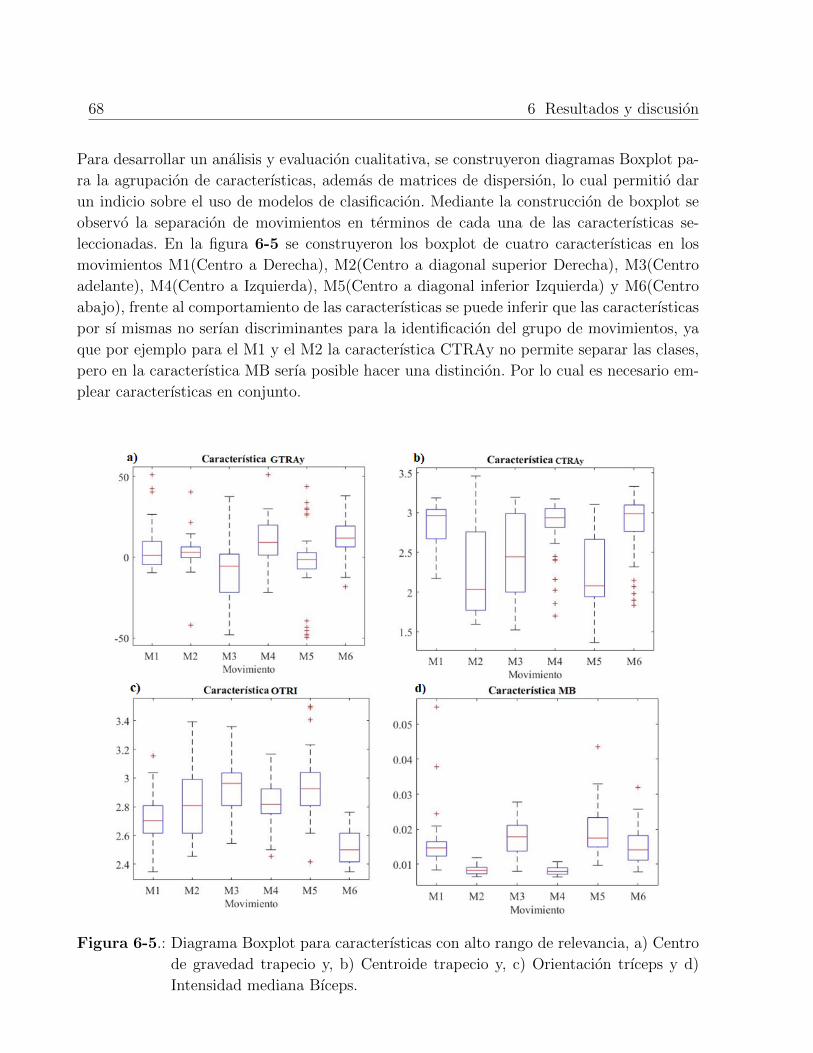
68 6 Resultados y discusion
Para desarrollar un analisis y evaluacion cualitativa, se construyeron diagramas Boxplot pa-
ra la agrupacion de caracterısticas, ademas de matrices de dispersion, lo cual permitio dar
un indicio sobre el uso de modelos de clasificacion. Mediante la construccion de boxplot se
observo la separacion de movimientos en terminos de cada una de las caracterısticas se-
leccionadas. En la figura 6-5 se construyeron los boxplot de cuatro caracterısticas en los
movimientos M1(Centro a Derecha), M2(Centro a diagonal superior Derecha), M3(Centro
adelante), M4(Centro a Izquierda), M5(Centro a diagonal inferior Izquierda) y M6(Centro
abajo), frente al comportamiento de las caracterısticas se puede inferir que las caracterısticas
por sı mismas no serıan discriminantes para la identificacion del grupo de movimientos, ya
que por ejemplo para el M1 y el M2 la caracterıstica CTRAy no permite separar las clases,
pero en la caracterıstica MB serıa posible hacer una distincion. Por lo cual es necesario em-
plear caracterısticas en conjunto.
Figura 6-5.: Diagrama Boxplot para caracterısticas con alto rango de relevancia, a) Centro
de gravedad trapecio y, b) Centroide trapecio y, c) Orientacion trıceps y d)
Intensidad mediana Bıceps.

6.3 Etapa III. Clasificacion de movimientos 69
Como observacion adicional se emplearon 3 caracterısticas diferentes, asociadas al centroide,
centro de gravedad e intensidad mediana, para la construccion del diagrama de dispersion,
con el objetivo de observar y relacionar las clases en un mismo espacio de caracterısticas.
Como se observa en la figura 6-6, debido al comportamiento de las mismas es posible pensar
que el rendimiento de clasificacion mediante un k-Vecinos o un LDA no demostrarıa un buen
desempeno debido a que el movimiento hacia adelante no se agrupa, sino que se encuentra
disperso, sin embargo es evidente que la seleccion de 3 caracterısticas no serıa suficiente para
la separacion de las seis clases, es necesario incluir caracterısticas que permitan diferenciar
los 6 movimientos.
Figura 6-6.: Diagrama de Dispersion espacio de tres caracterısticas.
6.3. Etapa III. Clasificacion de movimientos
Como se menciono en la seccion metodologica, en el primer experimento, se realizaron prue-
bas intra-sujeto, es decir, cada sujeto se sometio a una validacion cruzada tipo Leave-one-
out(LOO) y los resultados de la clasificacion con los diferentes clasificadores y la totalidad
de caracterısticas, reporto una sensibilidad maxima de 89 % con redes neuronales(NN) y
una mınima de 66 % con Analisis lineal discriminante(LDA) y Vecinos cercanos(K-NN). Por
otro lado se realizo la misma metodologıa para 4 sujetos empleando la agrupacion de carac-
terısticas seleccionadas, en donde se observa un aumento en la metrica, indicando que las

70 6 Resultados y discusion
caracterısticas seleccionadas arrojan mejores resultados, los mejores resultados de sensibili-
dad se presentan con una NN, obteniendo un valor maximo de 94 % en promedio2, y un valor
de 79 % con una maquina de soporte vectorial(SVM) con funcion cuadratica(qua).
6.3.1. Experimento I
Teniendo en cuenta lo anterior, los metodos de aprendizaje empleados en la etapa de cla-
sificacion fueron multiclase y supervisados, debido a que se tiene un vector que representa
las clases conocidas para cada observacion, es decir un groundtruth [Lucas et al., 2008,Pan
et al., 2015,Phinyomark and Scheme, 2018]. Se comparo cada resultado antes y despues de la
reduccion de caracterısticas, para los clasificadores de maquina de soporte vectorial(SVM),
Redes neuronales(NN), Vecinos cercanos(k-NN) y analisis discriminante lineal(LDA) [Tkach
et al., 2010,Saeed et al., 2021], siendo estos dos ultimos parte de los reportados en publica-
ciones previas de uso de informacion espacial. Estos metodos de clasificacion se implementan
con el fin de evaluar la capacidad de separabilidad de las caracterısticas debido a que pueden
tener una relacion lineal o no lineal [Togacar et al., 2020]. En 6-7 se reportan los resultados
de sensibilidad para cada clasificador, se observo una mejora en el rendimiento asociada a la
seleccion de caracterısticas en cada uno de los clasificadores empleados. Conjuntamente la
SVM cuadratica y la NN muestran mejores resultados por encima de los otros, mostrando
una posible inclinacion a la seleccion de estos.
Figura 6-7.: Sensibilidad promedio para clasificadores LDA, KNN, SVM Cuadratica, SMV
RBF y NN.
Teniendo en cuenta lo anterior, los resultados obtenidos concuerdan con lo observado en los
2La totalidad de los resultados de las metricas obtenidas se observa en el Anexo C, precision, sensibilidad
y F1-Score, intra-sujeto de 4 sujetos.

6.4 Etapa IV. Evaluacion 71
diagramas de dispersion, por ejemplo para la clase 3(movimiento diagonal superior derecha),
se observa que este movimiento en particular no tiene una vecindad definida, lo que se puede
atribuir al bajo rendimiento de K-NN, ya que se basa en la distancia entre caracterısticas
que se encuentran en el conjunto de entrenamiento y los k-vecinos cercanos. Caso similar se
pudo observar con el LDA ya que no hay una combinacion estrictamente lineal de rasgos que
permitan separar una o mas clases [Saeed et al., 2021]. Por otro lado se opto por emplear
una SVM con un Kernel cuadratico y con funcion de base radial(RBF). Por medio del
cual se generan hiperplanos para separar las clases con un margen maximo [Saeed et al.,
2021,Togacar et al., 2020]. Finalmente se implemento una red neuronal(NN), con 20 nodos,
se decidio emplear esta configuracion variando la cantidad de nodos, de 10, 15, 20 y 25, como
se muestra en 6-8, en donde se observa un mejor resultado con 20 nodos.
Figura 6-8.: Reporte de la metrica de F1-Score variando los nodos de la red neuronal(NN)
con Sujeto 1.
A parir de lo observado en el experimento intra-sujeto, se analizo que el uso del conjunto de
caracterısticas combinadas permitio mejorar el rendimiento de clasificacion de movimientos
dinamicos. Para 4 sujetos se obtuvo un F1-Score medio de 94 % en el mejor caso, con NN.
Adicionalmente las metricas de clasificacion antes y despues de la seleccion del conjunto de
caracterısticas demostraron una baja variacion entre los sujetos. Para los siguientes expe-
rimentos se espera una mayor variabilidad entre los datos ya que aumenta la cantidad de
pacientes al momento de entrenar y validar el modelo de clasificacion.
6.4. Etapa IV. Evaluacion
A partir de los resultados de las metricas de clasificacion reportados intra-sujeto, se desa-
rrollaron los disenos experimentales para la clasificacion de movimientos teniendo en cuenta

72 6 Resultados y discusion
los 8 sujetos. Se emplearon unicamente NN y SVM(cuadratica), comparando el rendimiento
de los clasificadores. Con base en lo anterior se implementaron experimentos de clasificacion
como se definen a continuacion: (2) Comparacion de resultados empleando la metodologıa
implementada con metodologıas de autores anteriores [Jordanic et al., 2016], en donde se em-
plean descriptores relacionados unicamente al centro de gravedad e intensidad. (3) 6 Clases
desbalanceadas por medio de un Leave− One− Out(LOO) antes y despues de la seleccion
de caracterısticas, y con las 6 clases balanceadas. Y por ultimo (4) 6 Clases balanceadas, por
medio de re-muestreo, eliminando observaciones, ya que no es posible obtener mas datos;
por medio de cross− validation tipo K-fold, con K=6.
6.4.1. Experimento II: Pruebas de clasificacion descriptores Centro de
gravedad e Intensidad mediana - lınea base de comparacion
Para el experimento II, se tuvo en cuenta la metodologıa propuesta por [Rojas-Martınez et al.,
2017], en donde se realizo un analisis en la mejora del rendimiento de clasificacion basado
en la distribucion espacial y el calculo de intensidades de los mapas de activacion, durante
el desarrollo del metodo mencionado se trabajo en la identificacion de tareas dinamicas y
estaticas. El desarrollo de este proyecto se baso en la identificacion de 6 tareas dinamicas,
debido a su complejidad, en la tabla 6-10, se observan las metricas de sensibilidad y precision
reportadas por los autores para tareas dinamicas de 4 sujetos, en donde se concluyo que la
combinacion de descriptores espaciales como el centro de gravedad(CG) permite mejorar el
rendimiento de identificacion, en conjunto con la caracterıstica asociada a la intensidad(I).
Por lo tanto se considera que la distribucion espacial permitirıa describir la tarea a identificar,
hipotesis que se comprueba a lo largo del desarrollo de este proyecto.
Metricas reportadas por [Rojas-Martınez et al., 2017],
con caracterısticas de CG e Intensidad
Sensibilidad Precision
Desde el centro
haciaIzquierda 85 ±13,1 83.1 ±5,7
Derecha 94.8 ±3,4 91.9 ±7,9
Frente 84.4 ±11,0 86.7 ±11
Hacia el centro
desdeIzquierda 92.3 ±7,1 92.4 ±12,8
Derecha 85.1 ±6,2 86.7 ±6,6
Frente 81.0 ±5,6 89.7 ±7,4
Promedio 87.1 ±7,7 88.4 ±8,6
Tabla 6-10.: Resultados de clasificacion de 6 movimientos dinamicos empleando caracterıti-
cas de Intensidad y centro de gravedad(CG) [Rojas-Martınez et al., 2017].

6.4 Etapa IV. Evaluacion 73
Una vez se observaron los resultados mencionados anteriormente, se realizo una prueba de
clasificacion bajo condiciones similares a los autores, empleando unicamente el centro de
gravedad y la intensidad provenientes de los mapas de activacion, con el fin de obtener una
lınea base y comparar los resultados, en metodologıa similares, sin embargo es importante
notar que los autores emplean otro clasificador, en la tabla 6-11 se observan las metricas
con el clasificador tipo maquina de soporte vectorial(SVM) cuadratica y en 6-12 se observan
las metricas que se obtuvieron mediante la red neuronal(NN), a diferencia de la metodologıa
propuesta por otros autores, se emplearon 8 sujetos de prueba. Ademas se tuvo en cuenta
caracterısticas provenientes de la totalidad del grupo muscular, a diferencia de los autores
mencionados en donde no se tiene en cuenta el musculo pectoral.
Clasificacion con metodologıa propuesta
caracterısticas CG e Intensidad SVM
Movimiento Sensibilidad Precision F1-Score
Desde el
centro haciaDerecha(C1) 0,66 0,71 0,68
Izquierda(C2) 0,81 0,77 0,79
Diag. superior
derecha(C3)0,64 0,42 0,51
Diag. inferior
izquierda(C4)0,89 0,89 0,89
Frente(C5) 0,63 0,76 0,69
Atras(C6) 0,76 0,78 0,77
Promedio 0,73 σ = 0, 10 0,72 σ = 0, 14 0,72 σ = 0, 12
Tabla 6-11.: Resultados de clasificacion metodologıa propuesta, identificacion de 6 movi-
mientos dinamicos empleando caracterıticas de Intensidad y centro de grave-
dad(CG) clasificador SVM kernel cuadratico.
En 6-11 se reportan resultados empleando una SMV, la sensibilidad media fue de 73 % em-
pleando unicamente el CG y la I media, comparado con la sensibilidad media que se obtuvo
con una NN en 6-12 la cual fue de 85 %, se llego a la conclusion que los resultados son
tecnicamente comparables empleando una NN, ya que se obtuvo un 2 % menos con respecto
a [Rojas-Martınez et al., 2017], lo que permite concluir que la metodologıa propuesta se
acerca al objetivo de los autores mencionados.
Con base en lo demostrado anteriormente, puntualmente durante en el desarrollo de este
trabajo se exploraron descriptores espaciales, ademas del CG, como el centroide(C) y la
orientacion(O) de la zona de activacion, en conjunto con la intensidad media para caracterizar
e identificar 6 tareas dinamicas, los resultados que se observan en 6-13 a partir de la matriz
de confusion, ver 6-9, demuestra una mejora en las metricas, de aproximadamente un 8 % en

74 6 Resultados y discusion
Clasificacion con metodologıa propuesta
caracterısticas CG e Intensidad
Movimiento Sensibilidad Precision F1-Score
Desde el
centro haciaDerecha(C1) 0,88 0,85 0,86
Izquierda(C2) 0,83 0,85 0,84
Diag. superior
derecha(C3)0,81 0,70 0,75
Diag. inferior
izquierda(C4)0,91 0,91 0,91
Frente(C5) 0,77 0,82 0,80
Atras(C6) 0,89 0,89 0,89
Promedio 0,85 σ = 0, 02 0,84 σ = 0, 05 0,84 σ = 0, 06
Tabla 6-12.: Resultados de clasificacion metodologıa propuesta, identificacion de 6 movi-
mientos dinamicos empleando caracterısticas de Intensidad y centro de grave-
dad(CG) clasificador NN.
la clasificacion de tareas dinamicas, teniendo en cuenta los descriptores espaciales explorados
en el desarrollo de la metodologıa propuesta en este proyecto de grado.
Clasificacion con metodologıa propuesta
seleccion desde el filtrado de carcaterısticas.
Movimiento Sensibilidad Precision F1-Score
Desde el
centro haciaDerecha(C1) 0,97 0,96 0,96
Izquierda(C2) 0,91 0,92 0,92
Diag. superior
derecha(C3)0,97 0,97 0,97
Diag. inferior
izquierda(C4)0,96 0,96 0,96
Frente(C5) 0,94 0,92 0,93
Atras(C6) 0,95 0,95 0,95
Promedio 0,95 σ = 0, 02 0,94 σ = 0, 05 0,94 σ = 0, 06
Tabla 6-13.: Metricas de clasificacion a partir de la matriz de confusion en 6-9, por la meto-
dologıa propuesta y seleccion de caracterısticas, Centroide(C), Intensidad(M),
orientacion(O) y centro de gravedad(CG). Por medio de NN y LOO.

6.4 Etapa IV. Evaluacion 75
Figura 6-9.: Matriz de confusion clasificacion de 6 movimientos dinamicos despues de se-
leccion de caracterısticas.
6.4.2. Experimento III: Pruebas de clasificacion Leave-One-Out(LOO)
En la tabla 6-14 Se observan las metricas de exactitud(Acc), sensibilidad(SC), Precision(Pr)
y F1-Score, con la respectiva desviacion estandar(d), obtenidas para los dos primeros disenos
experimentales mencionados anteriormente, como se esperaba hay un aumento en el rendi-
miento en los dos clasificadores despues de la seleccion de caracterısticas con mRMR y
Relieff. Sin embargo los mejores resultados se obtuvieron con la NN balanceando las clases
y aplicando un LOO3.
En 6-14 se observan las metricas de clasificacion con validacion LOO, antes y despues de
balancear las observaciones por clase. Para el caso de las clases desbalanceadas se obtuvo una
exactitud alta, sin embargo una baja sensibilidad y precision. A diferencia de las metricas
despues del remuestreo y las clases balanceadas, en donde se tiene una exactitud similar a la
sensibilidad, precision y F1-Score. Por ultimo, se procedio a realizar una validacion cruzada
tipo k-fold con NN, ya que se obtuvo el mejor resultado, para verificar el funcionamiento de
la clasificacion, lo que corresponde a la siguiente prueba.
3Para ver los resultados discriminados por clase ir a Anexo IV
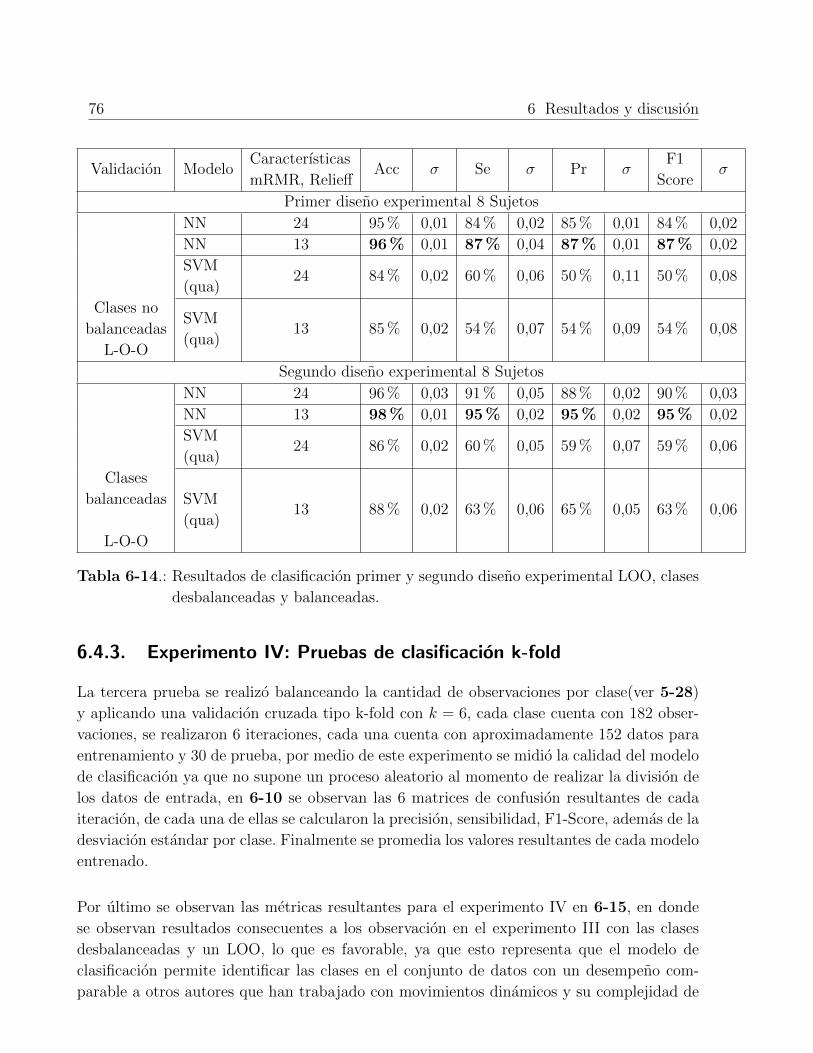
76 6 Resultados y discusion
Validacion ModeloCaracterısticas
mRMR, RelieffAcc σ Se σ Pr σ
F1
Scoreσ
Primer diseno experimental 8 Sujetos
NN 24 95 % 0,01 84 % 0,02 85 % 0,01 84 % 0,02
NN 13 96 % 0,01 87 % 0,04 87 % 0,01 87 % 0,02
SVM
(qua)24 84 % 0,02 60 % 0,06 50 % 0,11 50 % 0,08
Clases no
balanceadas
L-O-O
SVM
(qua)13 85 % 0,02 54 % 0,07 54 % 0,09 54 % 0,08
Segundo diseno experimental 8 Sujetos
NN 24 96 % 0,03 91 % 0,05 88 % 0,02 90 % 0,03
NN 13 98 % 0,01 95 % 0,02 95 % 0,02 95 % 0,02
SVM
(qua)24 86 % 0,02 60 % 0,05 59 % 0,07 59 % 0,06
Clases
balanceadas
L-O-O
SVM
(qua)13 88 % 0,02 63 % 0,06 65 % 0,05 63 % 0,06
Tabla 6-14.: Resultados de clasificacion primer y segundo diseno experimental LOO, clases
desbalanceadas y balanceadas.
6.4.3. Experimento IV: Pruebas de clasificacion k-fold
La tercera prueba se realizo balanceando la cantidad de observaciones por clase(ver 5-28)
y aplicando una validacion cruzada tipo k-fold con k = 6, cada clase cuenta con 182 obser-
vaciones, se realizaron 6 iteraciones, cada una cuenta con aproximadamente 152 datos para
entrenamiento y 30 de prueba, por medio de este experimento se midio la calidad del modelo
de clasificacion ya que no supone un proceso aleatorio al momento de realizar la division de
los datos de entrada, en 6-10 se observan las 6 matrices de confusion resultantes de cada
iteracion, de cada una de ellas se calcularon la precision, sensibilidad, F1-Score, ademas de la
desviacion estandar por clase. Finalmente se promedia los valores resultantes de cada modelo
entrenado.
Por ultimo se observan las metricas resultantes para el experimento IV en 6-15, en donde
se observan resultados consecuentes a los observacion en el experimento III con las clases
desbalanceadas y un LOO, lo que es favorable, ya que esto representa que el modelo de
clasificacion permite identificar las clases en el conjunto de datos con un desempeno com-
parable a otros autores que han trabajado con movimientos dinamicos y su complejidad de

6.4 Etapa IV. Evaluacion 77
Figura 6-10.: Matrices de confusion NN validacion cruzada 6K-Fold.
descripcion. Ademas se asegura con el modelo que no hay un sobreajuste en la etapa de III y
IV. Adicionalmente se observa que las metricas tienen una baja desviacion estandar lo cual
es favorable, ya que hay que tener un en cuenta que dentro de los datos hay informacion
proveniente de 8 pacientes y una baja desviacion indica que comparten informacion que
permite caracterizar un mismo movimiento o este caso 6.
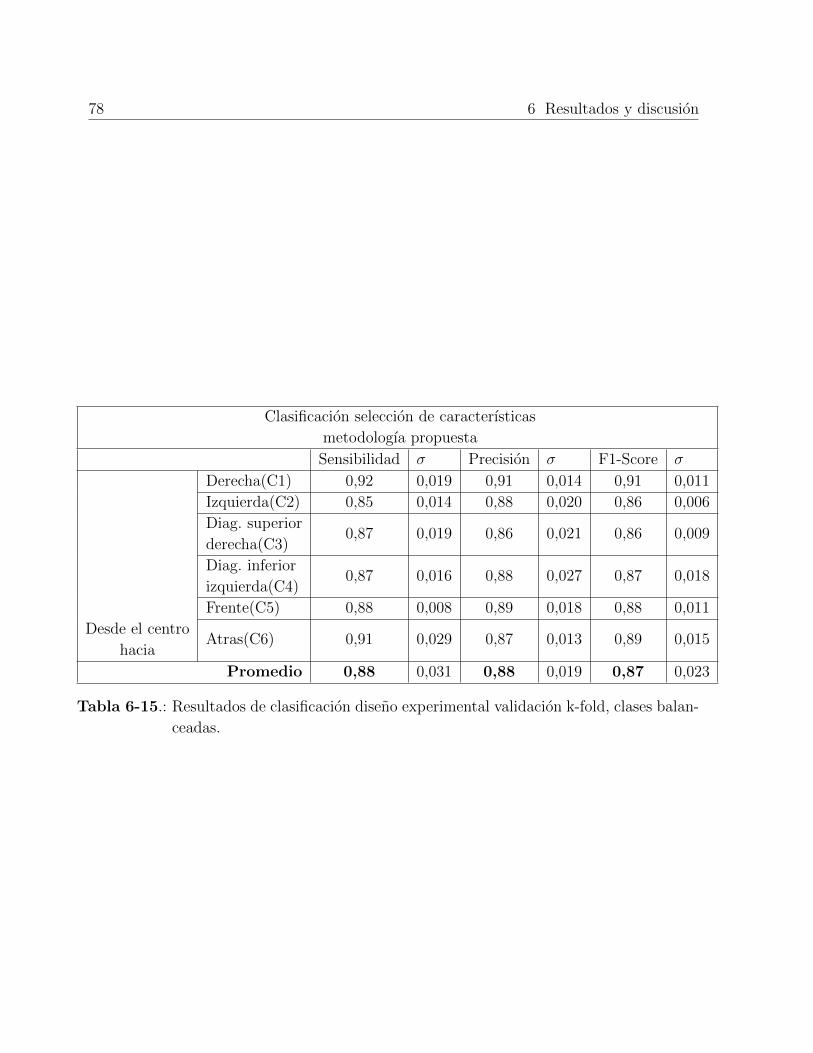
78 6 Resultados y discusion
Clasificacion seleccion de caracterısticas
metodologıa propuesta
Sensibilidad σ Precision σ F1-Score σ
Derecha(C1) 0,92 0,019 0,91 0,014 0,91 0,011
Izquierda(C2) 0,85 0,014 0,88 0,020 0,86 0,006
Diag. superior
derecha(C3)0,87 0,019 0,86 0,021 0,86 0,009
Diag. inferior
izquierda(C4)0,87 0,016 0,88 0,027 0,87 0,018
Frente(C5) 0,88 0,008 0,89 0,018 0,88 0,011
Desde el centro
haciaAtras(C6) 0,91 0,029 0,87 0,013 0,89 0,015
Promedio 0,88 0,031 0,88 0,019 0,87 0,023
Tabla 6-15.: Resultados de clasificacion diseno experimental validacion k-fold, clases balan-
ceadas.

7. Conclusiones
El presente trabajo propone una metodologıa para la deteccion de movimientos asociados
a la articulacion del hombro, a traves de caracterısticas espaciales provenientes de mapas
de activacion construidos con senales HD-EMG. Con esto no solo se presenta un metodo de
inteligencia artificial que clasifica seis diferentes movimientos de la articulacion, sino tambien
se describe un procedimiento estructurado de pre-procesamiento y seleccion de variables so-
bre las senales HD-EMG, para la construccion de los nombrados mapas de activacion.
Ademas de lo anterior, esta etapa de la investigacion permite determinar las caracterısticas
espaciales mas discriminantes mediante el uso de herramientas de filtrado no parametricas.
Para el caso especıfico de los movimientos aca estudiados las caracterısticas mas relevantes
resultaron ser, para trapecio, el Centro de gravedad y centroide; para trıceps, centroide,
centro de gravedad y orientacion; para bıceps, centroide, intensidad mediana y centro de
gravedad; por ultimo el pectoral con la intensidad mediana y el centro de gravedad, por lo
cual se aprecia una integracion de los 4 musculos descritos en el protocolo de adquisicion.
Finalmente, como resultado del trabajo de grado se obtiene un modelo de redes neurona-
les que permite diferenciar los seis movimientos propuestos, en pacientes sanos, con una
exactitud de 96 % y una sensibilidad maximas de 94 %. Estos valores de rendimiento son
comparables con los encontrados por otros autores en tareas isometricas, mediante el uso de
descriptores espaciales, demostrando la pertinencia y calidad del procedimiento ejecutado en
la tarea especıfica de este proyecto.
Como trabajo futuro se propone la evaluacion del metodo propuesto, en la tarea correspon-
diente de deteccion de movimiento para los movimientos que no fueron tenidos en cuenta, y
que se encuentran incluidos dentro de la base de datos. Ademas, un paso mas adelante en
el proyecto que enmarca este trabajo de grado es la extension de la metodologıa en sujetos
con algunas patologıas relacionada con la articulacion del hombro.

8. Recomendaciones
A lo largo del desarrollo del trabajo de grado y el analisis de resultados se dieron diferentes
tipos de conclusiones que son las que seran descritas a continuacion:
Como se menciono en secciones anteriores, durante el protocolo de adquisicion de las
senales de HD-EMG se presentan interferencias por ruido de lınea electrica e interferen-
cias por movimiento (mayormente en movimientos dinamicos, debido a la elongacion de
los musculos). Para este proyecto de investigacion se implemento un algoritmo para la
atenuacion de ruidos de lınea electrica y un filtro Hampel para la identificacion de cana-
les artefactos. Sin embargo, otros autores [Zheng and Hu, 2019], proponen un metodo
que aporta robustez en la identificacion de interferencias y reduccion de ruido en los
componentes espectrales de lınea electrica, en senales HD-EMG, basado en un analisis
de componentes independientes (ICA). Por lo que serıa recomendable implementar y
comparar los resultados obtenidos en este proyecto y futuros trabajos.
La segmentacion de la zona o zonas de activacion en los mapas de HD-EMG, puede
resultar sensible debido a la variacion natural que existe entre los musculos, por lo tan-
to, para trabajos futuros se recomiendo emplear una segmentacion adaptativa, ya que
debe poder estar en posicion de ajustarse segun el musculo que ejerza el movimiento,
mas que nada para movimientos dinamicos.
Dentro del proyecto de investigacion se identificaron seis movimientos dinamicos re-
gistrados a partir del seguimiento de una trayectoria, sin embargo en la base de datos
se encuentra informacion registrada de 16 movimientos, por lo tanto se recomienda
a futuros estudiantes interesados en este campo, a contemplar el funcionamiento de
la metodologıa planteada con mas direcciones de movimiento e incluso la exploracion
de metodos que aporten optimizacion del proceso, con el fin de comparar resultados
obtenidos en la metodologıa planteada.

A. Anexo I: Tablas de similitud de las
variables empleadas en la
construccion de los mapas de
activacion.
A continuacion, se presentan algunos ejemplos de las tablas de analisis de similitud entre el
tamano de ventana y las variables para la construccion de los mapas de activacion, esto es
una ejemplificacion de como se variaron las tablas de similitud, no se incluye la totalidad de
las tablas de similitud creadas debido a la cantidad. Las imagenes que se analizaron fueron
tomadas del mismo movimiento, mismo musculo, unicamente se vario el ciclo en donde se
ejecuto el movimiento.
Figura A-1.: Tabla de similitud de imagenes con ventana de 512, valor RMS, En Bıceps y
movimiento 11. Resultados para el ındice de distancia euclidiana.

Figura A-2.: Tabla de similitud de imagenes con ventana de 400, valor RMS, En Bıceps y
movimiento 11. Resultados para la correlacion de Pearson.
Figura A-3.: Tabla de similitud de imagenes con ventana de 400, valor MNAD, En Trapecio
y movimiento 4. Resultados para el ındice dedistancia entre Histogramas.
Figura A-4.: Tabla de similitud de imagenes con ventana de 512, valor MNAD, En Trıcpes
y movimiento 15. Resultados para el ındice de similitud estructural.

Bıceps, Movimiento 11 Tamano de ventana
300 400 512 600
Distancia Euclidiana RMS 0,0 % 33,3 % 43,2 % 33,3 %
MDF 0,0 % 0,0 % 0,0 % 0,0 %
MNAD 55,6 % 74,1 % 71,9 % 90,0 %
Nota: La distancia para MDF sobrepasa el valor respecto
a las demas variables
Tabla A-1.: Porcentaje de datos agrupados para el analisis de similitud con Distancia Eu-
clidiana en un rango entre 0 a 0.5.
Pectoral, Movimiento 8 Tamano de ventana
300 400 512 600
Distancia Euclidiana RMS 0 % 0 % 0 % 0 %
MDF 0 % 0 % 0 % 0 %
MNAD 0 % 0 % 0 % 0 %
Tabla A-2.: Porcentaje de datos agrupados para el analisis de similitud con Distancia Eu-
clidiana en un rango entre 0 a 0.5.
Distancia Euclidiana
Pectoral, Movimiento 8 Tamano de ventana
300 400 512 600
RMS Promedio 14,53 3,88 3,86 3,86
Desviacion Estandar 0,82 0,30 0,30 0,31
Coeficiente de Variacion 0,06 0,08 0,08 0,08
MDF Promedio 3,59 0,85 0,84 0,78
Desviacion Estandar 0,88 0,31 0,31 0,31
Coeficiente de Variacion 0,24 0,37 0,37 0,40
MNAD Promedio 3,24 3,30 4,06 3,28
Desviacion Estandar 0,22 0,23 0,02 0,23
Coeficiente de Variacion 0,07 0,07 0,01 0,07
Tabla A-3.: Metricas estadısticas para el analisis de similitud con Distancia Euclidiana.

Trapecio, Movimiento 4 Tamano de ventana
300 400 512 600
Distancia Euclidiana RMS 8,9 % 88,9 % 77,8 % 75,0 %
MDF 0 % 14,44 % 22,22 % 16,66 %
MNAD 77,77 % 76,74 % 71,42 % 75,00 %
Tabla A-4.: Porcentaje de datos agrupados para el analisis de similitud con Distancia Eu-
clidiana en un rango entre 0 a 0.5.
Distancia Euclidiana
Trapecio, Movimiento 4 Tamano de ventana
300 400 512 600
RMS Promedio 2,93 0,60 0,59 0,61
Desviacion Estandar 1,49 0,23 0,19 0,23
Coeficiente de Variacion 0,51 0,39 0,32 0,38
MDF Promedio 1,17 1,11 1,06 1,05
Desviacion Estandar 0,19 0,06 0,17 0,16
Coeficiente de Variacion 0,16 0,06 0,16 0,16
MNAD Promedio 0,46 0,46 0,44 0,47
Desviacion Estandar 0,18 0,17 0,15 0,16
Coeficiente de Variacion 0,39 0,37 0,33 0,35
Tabla A-5.: Metricas estadısticas para el analisis de similitud con Distancia Euclidiana.
Trıceps, Movimiento 13 Tamano de ventana
300 400 512 600
Distancia Euclidiana RMS 0 % 63,33 % 42,85 % 64,81 %
MDF 0 % 35,55 % 39,06 % 22,22 %
MNAD 78,88 % 66,66 % 28,57 % 38,88 %
Tabla A-6.: Porcentaje de datos agrupados para el analisis de similitud con Distancia Eu-
clidiana en un rango entre 0 a 0.5.

Distancia Euclidiana
Triceps, Movimiento 15 Tamano de ventana
300 400 512 600
RMS Promedio 1,45 0,26 0,26 0,26
Desviacion Estandar 0,43 0,06 0,05 0,05
Coeficiente de Variacion 0,30 0,24 0,20 0,18
MDF Promedio 10,65 1,07 1,04 0,99
Desviacion Estandar 1,40 0,11 0,11 0,09
Coeficiente de Variacion 0,13 0,10 0,10 0,09
MNAD Promedio 0,46 0,22 0,20 0,24
Desviacion Estandar 0,24 0,05 0,03 0,07
Coeficiente de Variacion 0,52 0,21 0,15 0,29
Tabla A-7.: Metricas estadısticas para el analisis de similitud con Distancia Euclidiana.
Pectoral, Movimiento 8 Tamano de ventana
300 400 512 600
Correlacion RMS 24,0 % 66,6 % 66,3 % 58,3 %
MDF 4,0 % 6,3 % 9,0 % 5,5 %
MNAD 17,0 % 82,0 % 73,5 % 13,9 %
Tabla A-8.: Porcentaje de datos agrupados para el analisis de similitud con el Coeficiente
de Correlacion de Pearson.
Coeficiente de Correlacion de Pearson
Pectoral, Movimiento 8 Tamano de ventana
300 400 512 600
RMS Promedio 0,52 0,50 0,50 0,50
Desviacion Estandar 0,08 0,09 0,09 0,09
Coeficiente de Variacion 0,16 0,18 0,18 0,19
MDF Promedio 0,02 0,01 0,03 0,02
Desviacion Estandar 0,20 0,23 0,22 0,25
Coeficiente de Variacion 8,79 21,28 6,35 14,06
MNAD Promedio 0,50 0,49 0,49 0,49
Desviacion Estandar 0,08 0,08 0,08 0,08
Coeficiente de Variacion 0,15 0,17 0,17 0,17
Tabla A-9.: Metricas estadısticas para el analisis de similitud con Coeficiente de Correlacion
de Pearson.

Trapecio, Movimiento 4 Tamano de ventana
300 400 512 600
Correlacion RMS 12,5 % 20,0 % 31,3 % 22,2 %
MDF 0,0 % 7,0 % 9,0 % 1,6 %
MNAD 16,3 % 36,0 % 37,5 % 33,3 %
Tabla A-10.: Porcentaje de datos agrupados para el analisis de similitud con el Coeficiente
de Correlacion de Pearson.
Coeficiente de Correlacion de Pearson
Trapecio, Movimiento 4 Tamano de ventana
300 400 512 600
RMS Promedio 0,33 0,33 0,36 0,40
Desviacion Estandar 0,20 0,23 0,17 0,23
Coeficiente de Variacion 0,63 0,70 0,48 0,58
MDF Promedio 0,14 0,15 0,11 0,13
Desviacion Estandar 0,14 0,15 0,14 0,19
Coeficiente de Variacion 1,06 1,02 1,25 1,49
MNAD Promedio 0,37 0,37 0,41 0,49
Desviacion Estandar 0,20 0,25 0,21 0,21
Coeficiente de Variacion 0,55 0,67 0,51 0,43
Tabla A-11.: Metricas estadısticas para el analisis de similitud con Coeficiente de Correla-
cion de Pearson.
Coeficiente de Correlacion de Pearson
Triceps, Movimiento 15 Tamano de ventana
300 400 512 600
RMS Promedio 0,06 0,26 0,24 0,24
Desviacion Estandar 0,09 0,10 0,08 0,08
Coeficiente de Variacion 1,56 0,37 0,35 0,35
MDF Promedio 0,02 0,14 0,13 0,16
Desviacion Estandar 0,06 0,09 0,08 0,09
Coeficiente de Variacion 2,55 0,67 0,58 0,56
MNAD Promedio 0,07 0,26 0,25 0,24
Desviacion Estandar 0,11 0,09 0,07 0,07
Coeficiente de Variacion 1,61 0,36 0,28 0,29
Tabla A-12.: Metricas estadısticas para el analisis de similitud con Coeficiente de Correla-
cion de Pearson.

Trıceps, Movimiento 13 Tamano de ventana
300 400 512 600
Correlacion RMS 14,0 % 19,0 % 20,0 % 11,1 %
MDF 0,0 % 0,0 % 2,0 % 0,0 %
MNAD 5,0 % 5,0 % 5,0 % 0,0 %
Tabla A-13.: Porcentaje de datos agrupados para el analisis de similitud con el Coeficiente
de Correlacion de Pearson.
Bıceps, Movimiento 11 Tamano de ventana
400 512
Distancia entre histogramas RMS 20 % 45 %
MNAD 77,14 % 75 %
Tabla A-14.: Porcentaje de datos agrupados para el analisis de similitud con la Distancia
entre Histogramas para una distancia menor a 0,5.
Distancia entre Histogramas
Biceps, Movimiento 11 Tamano de ventana
400 512
RMS Promedio 0,13 0,14
Desviacion Estandar 0,06 0,06
Coeficiente de Variacion 0,44 0,44
MNAD Promedio 0,12 0,14
Desviacion Estandar 0,02 0,04
Coeficiente de Variacion 0,17 0,29
Tabla A-15.: Metricas estadısticas para el analisis de similitud con la Distancia entre His-
togramas para una distancia menor a 0,5.
Pectoral, Movimiento 8 Tamano de ventana
400 512
Distancia entre histogramas RMS 87,5 % 100,0 %
MNAD 57,1 % 100,0 %
MNAD 5,0 % 5,0 %
Tabla A-16.: Porcentaje de datos agrupados para el analisis de similitud con la Distancia
entre Histogramas para una distancia menor a 0,5.

Distancia entre Histogramas
Pectoral, Movimiento 8 Tamano de ventana
400 512
RMS Promedio 0,04 0,04
Desviacion Estandar 0,01 0,01
Coeficiente de Variacion 0,25 0,20
MNAD Promedio 0,05 0,05
Desviacion Estandar 0,01 0,01
Coeficiente de Variacion 0,25 0,18
Tabla A-17.: Metricas estadısticas para el analisis de similitud con la Distancia entre His-
togramas para una distancia menor a 0,5.
Trıceps, Movimiento 16 Tamano de ventana
400 512
Distancia entre histogramas RMS 10,0 % 23,3 %
MNAD 10,0 % 15,7 %
Tabla A-18.: Porcentaje de datos agrupados para el analisis de similitud con la Distancia
entre Histogramas para una distancia menor a 0,5.
Distancia entre Histogramas
Triceps, Movimiento 15 Tamano de ventana
400 512
RMS Promedio 0,11 0,30
Desviacion Estandar 0,10 0,25
Coeficiente de Variacion 0,89 0,82
MNAD Promedio 0,10 0,12
Desviacion Estandar 0,07 0,10
Coeficiente de Variacion 0,75 0,78
Tabla A-19.: Metricas estadısticas para el analisis de similitud con la Distancia entre His-
togramas para una distancia menor a 0,5.
Bıceps, Movimiento 11 Tamano de ventana
400 512
SSIM RMS 10,0 % 8,3 %
MNAD 2,9 % 2,1 %
Tabla A-20.: Porcentaje de datos agrupados para el analisis de similitud con el Indice de
Similitud Estructural.

Trıceps, Movimiento 16 Tamano de ventana
400 512
SSIM RMS 38,0 % 67,8 %
MNAD 83,0 % 95,6 %
Tabla A-21.: Metricas estadısticas para el analisis de similitud con el Indice de Similitud
Estructural.
Indice de Similitud Estructural
Triceps, Movimiento 15 Tamano de ventana
400 512
RMS Promedio 0,53 0,53
Desviacion Estandar 0,08 0,07
Coeficiente de Variacion 0,14 0,13
MNAD Promedio 0,61 0,61
Desviacion Estandar 0,06 0,05
Coeficiente de Variacion 0,11 0,09
Tabla A-22.: Metricas estadısticas para el analisis de similitud con el Indice de Similitud
Estructural.
Indice de Similitud Estructural
Biceps, Movimiento 11 Tamano de ventana
400 512
RMS Promedio 0,45 0,45
Desviacion Estandar 0,08 0,08
Coeficiente de Variacion 0,18 0,17
MNAD Promedio 0,49 0,49
Desviacion Estandar 0,07 0,07
Coeficiente de Variacion 0,14 0,14
Tabla A-23.: Metricas estadısticas para el analisis de similitud con el Indice de Similitud
Estructural.
Pectoral, Movimiento 7 Tamano de ventana
400 512
SSIM RMS 4,0 % 18,8 %
MNAD 7,0 % 15,0 %
Tabla A-24.: Porcentaje de datos agrupados para el analisis de similitud con el Indice de
Similitud Estructural.
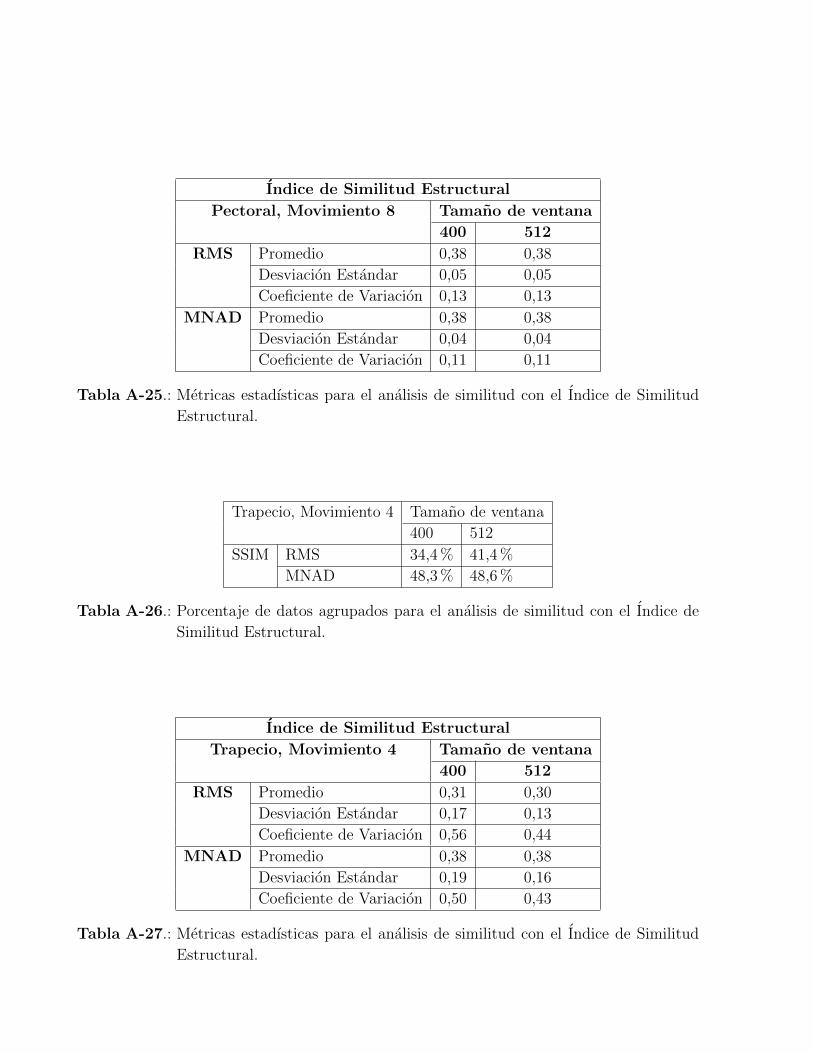
Indice de Similitud Estructural
Pectoral, Movimiento 8 Tamano de ventana
400 512
RMS Promedio 0,38 0,38
Desviacion Estandar 0,05 0,05
Coeficiente de Variacion 0,13 0,13
MNAD Promedio 0,38 0,38
Desviacion Estandar 0,04 0,04
Coeficiente de Variacion 0,11 0,11
Tabla A-25.: Metricas estadısticas para el analisis de similitud con el Indice de Similitud
Estructural.
Trapecio, Movimiento 4 Tamano de ventana
400 512
SSIM RMS 34,4 % 41,4 %
MNAD 48,3 % 48,6 %
Tabla A-26.: Porcentaje de datos agrupados para el analisis de similitud con el Indice de
Similitud Estructural.
Indice de Similitud Estructural
Trapecio, Movimiento 4 Tamano de ventana
400 512
RMS Promedio 0,31 0,30
Desviacion Estandar 0,17 0,13
Coeficiente de Variacion 0,56 0,44
MNAD Promedio 0,38 0,38
Desviacion Estandar 0,19 0,16
Coeficiente de Variacion 0,50 0,43
Tabla A-27.: Metricas estadısticas para el analisis de similitud con el Indice de Similitud
Estructural.

B. Anexo II: Seleccion de caracterısticas.
A continuacion se observa en analisis Relieff realizado sobre 4 sujetos incluyendo las 24
caracterısticas espaciales extraıdas y los seis movimientos.
Figura B-1.: Analisis Relieff Sujeto 1.
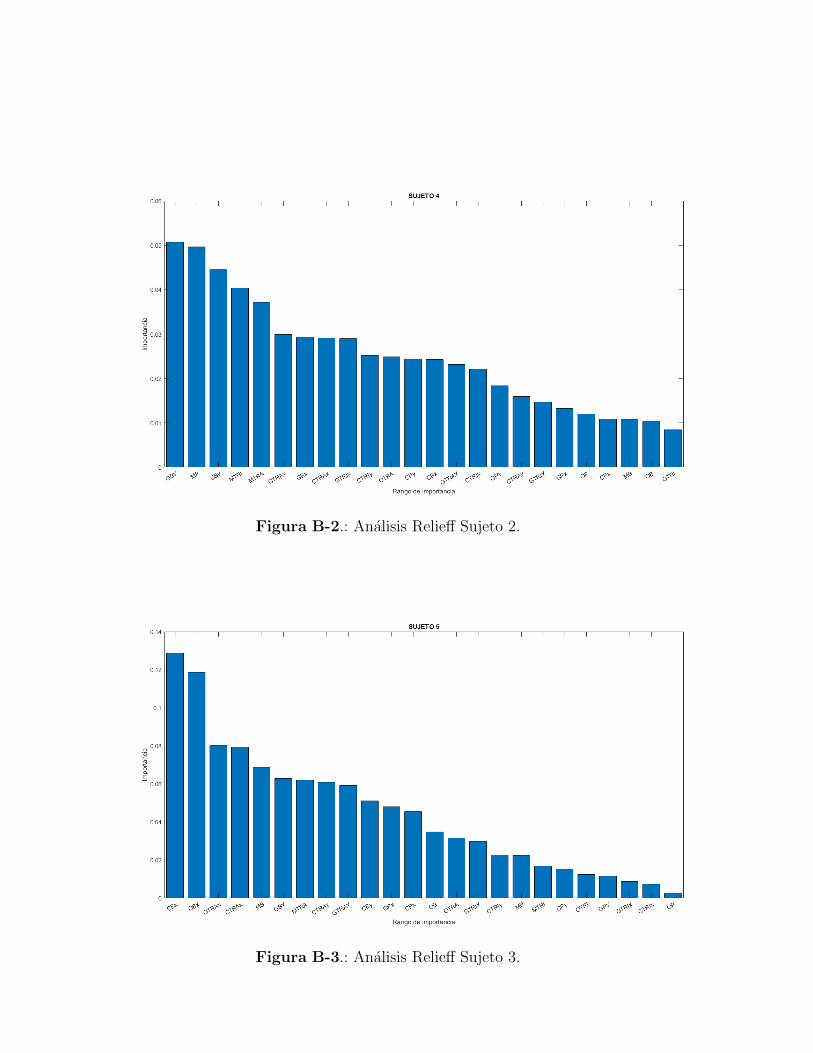
Figura B-2.: Analisis Relieff Sujeto 2.
Figura B-3.: Analisis Relieff Sujeto 3.

Figura B-4.: Analisis Relieff Sujeto 4.
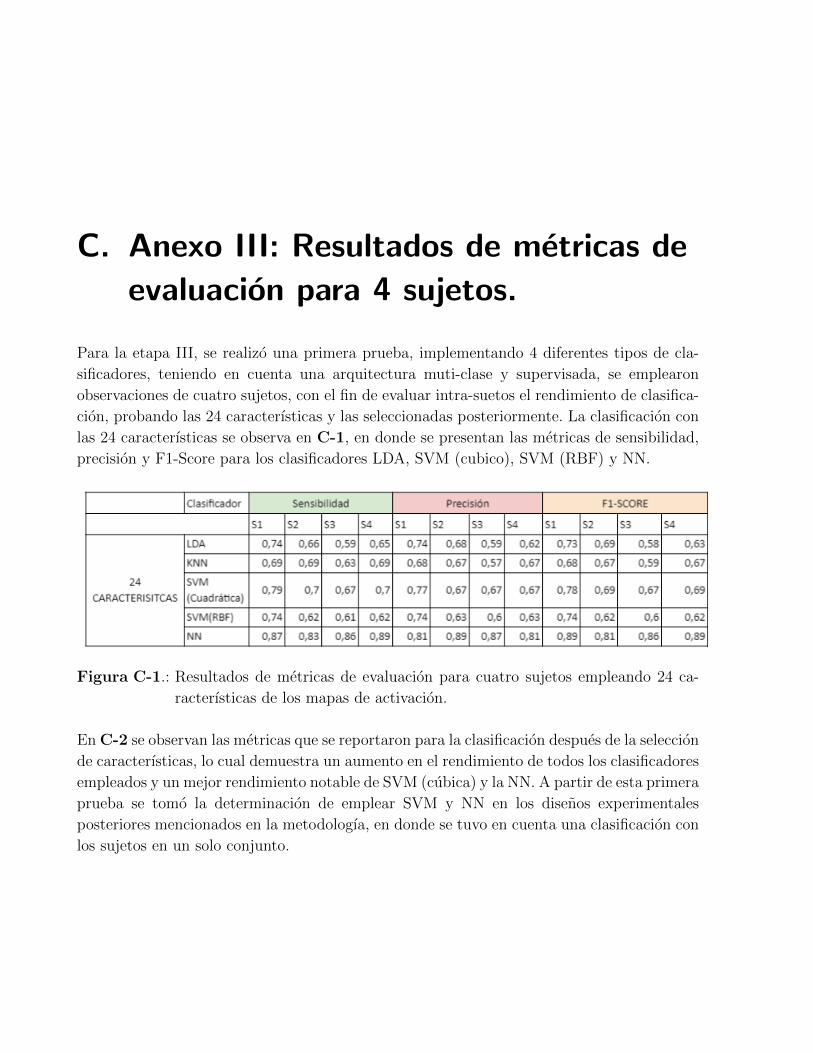
C. Anexo III: Resultados de metricas de
evaluacion para 4 sujetos.
Para la etapa III, se realizo una primera prueba, implementando 4 diferentes tipos de cla-
sificadores, teniendo en cuenta una arquitectura muti-clase y supervisada, se emplearon
observaciones de cuatro sujetos, con el fin de evaluar intra-suetos el rendimiento de clasifica-
cion, probando las 24 caracterısticas y las seleccionadas posteriormente. La clasificacion con
las 24 caracterısticas se observa en C-1, en donde se presentan las metricas de sensibilidad,
precision y F1-Score para los clasificadores LDA, SVM (cubico), SVM (RBF) y NN.
Figura C-1.: Resultados de metricas de evaluacion para cuatro sujetos empleando 24 ca-
racterısticas de los mapas de activacion.
En C-2 se observan las metricas que se reportaron para la clasificacion despues de la seleccion
de caracterısticas, lo cual demuestra un aumento en el rendimiento de todos los clasificadores
empleados y un mejor rendimiento notable de SVM (cubica) y la NN. A partir de esta primera
prueba se tomo la determinacion de emplear SVM y NN en los disenos experimentales
posteriores mencionados en la metodologıa, en donde se tuvo en cuenta una clasificacion con
los sujetos en un solo conjunto.

Figura C-2.: Resultados de metricas de evaluacion para cuatro sujetos despues de la reduc-
cion y seleccion de caracterısticas de los mapas de activacion.

D. Anexo IV: Resultados de clasificacion
experimento III (validacion LOO).
Como se observa en 5-28, las observaciones por clase estan desbalanceadas, el movimiento
3 cuenta con 138 observaciones provenientes de los 8 pacientes, a diferencia del movimiento
5, en este caso la clase mayoritaria con 333 observaciones. En los clasificadores el desbalance
en las clases afecta el entrenamiento del modelo [Togacar et al., 2020], como se puede ver en
la D-1 hay un favorecimiento en la precision de la clase 5, contrario a lo que sucede con la
clase 3.
Figura D-1.: Matrices de confusion clasificacion 8 sujetos, Red neuronal, observaciones por
clase desbalanceadas.
Con base en lo anterior se decidio realizar un balanceo de clase para el experimento III y IV,
como se observa en 5-28, en donde cada clase cuenta con 183 observaciones, a diferencia de
los resultados anteriores, se observa en las matrices de confusion D-2 resultados de precision
mas homogeneos de las clases.

97
Figura D-2.: Matrices de confusion clasificacion 8 sujetos, Red neuronal, observaciones por
clase balanceadas.

Bibliografıa
[Aguirre and Balza, 2015] Aguirre, I. and Balza, M. (2015). Diseno y construccion de un
exoesqueleto de brazo con dos grados de libertad controlado con senales mioelectricas
para rehabilitacion motora. Multiciencias, 15(1):96–105.
[Alonazi et al., 2018] Alonazi, A., Ma, Y., and Tafazolli, R. (2018). Delaunay triangulation
based interpolation for radio map construction with reduced calibration. In 2017 9th IEEE-
GCC Conference and Exhibition, GCCCE 2017. Institute of Electrical and Electronics
Engineers Inc.
[Arendt-Nielsen et al., 2008] Arendt-Nielsen, L., Farina, D., Leclerc, F., Buttelli, O., and
Madeleine, P. (2008). The change in spatial distribution of upper trapezius muscle acti-
vity is correlated to contraction duration. Journal of Electromyography and Kinesiology,
18(1):16–25.
[Ayala Lozano et al., 2015] Ayala Lozano, J. F., Urriolagoitia Sosa, G., Romero Angeles,
B., Torres San-Miguel, C. R., Aguilar-Perez, L. A., Urriolagoitia-Calderon, G. M., and
Urriolagoitia-Calderon, G. M. (2015). Diseno mecanico de un exoesqueleto para rehabili-
tacion de miembro superior. Revista Colombiana de Biotecnologıa, 17(1):79–90.
[Bakhsh and Nicandri, 2018] Bakhsh, W. and Nicandri, G. (2018). Anatomy and Physical
Examination of the Shoulder.
[Barrios a et al., 2017] Barrios a, L. J., Minguillon b, J., Perales c, F. J., Ron-Angevin d, R.,
Sole-Casals e, J., and Mananas, M. A. (2017). Estado del Arte en Neurotecnologıas para la
Asistencia y la Rehabilitacion en Espana: Tecnologıas Auxiliares, Transferencia Tecnologi-
ca y Aplicacion Clınica. - Buscar con Google. Revista Iberoamericana de Automatica e
Informatica Industrial, 14:355–361.
[Boettcher et al., 2010] Boettcher, C. E., Cathers, I., and Ginn, K. A. (2010). The role of
shoulder muscles is task specific. Journal of Science and Medicine in Sport, 13(6):651–656.
[Brinez de Leon et al., 2013] Brinez de Leon, J. C., Restrepo Martınez, A., and Lopez Gi-
raldo, F. E. (2013). Metricas de similitud aplicadas para analisis de imagenes de fotoelas-
ticidad. DYNA (Colombia), 80(179):42–50.
Bibliografıa 99
[Cabarcas Barboza and Guerrero Castilla, 2007] Cabarcas Barboza, A. P. and Guerrero
Castilla, T. Y. (2007). TECNICAS DE EXTRACCION DE CARACTERISTICAS DE
SENALES BIOMEDICAS. PhD thesis, Universidad Tecnologica de Bolivar.
[Cambria et al., 2016] Cambria, E., Masia, L., Bisio, F., Antuvan, C. W., Yen, S.-C., and
Marini, F. (2016). Role of Muscle Synergies in Real-Time Classification of Upper Limb
Motions using Extreme Learning Machines. Journal of NeuroEngineering and Rehabilita-
tion, 13(1):76.
[Carrasco Henao, 2016] Carrasco Henao, C. A. (2016). Electromiografıa superficial multica-
nal en musculo tibial anterior. PhD thesis, Pontificia Universidad Javeriana.
[Chamorro and Ovando-shelley, 2018] Chamorro, C. and Ovando-shelley, E. (2018). Analisis
de senales: Aplicacion de la correlacion cruzada discreta para la determinacion del primer
arribo de la onda cortante. Mexico. Sociedad Mexicana de Ingenierıa Geotecnica.
[Chan and Zoellick, 2011] Chan, M. and Zoellick, R. (2011). Informe mundial sobre la dis-
capacidad. Technical report, Organizacion Mundial de la salud.
[Cifuentes Gonzalez, 2012] Cifuentes Gonzalez, I. A. (2012). Extraccion de Caracterısticas
y Clasificacion de Senales Electromiograficas Utilizando la Transformada Hilbert-Huang y
Redes Neuronales. PhD thesis, Instituto Nacional de Astrofısica, Optica y Electronica,.
[Consejo de organizaciones Internacionales de las Ciencias Medicas(CIOMS), 2002]
Consejo de organizaciones Internacionales de las Ciencias Medicas(CIOMS) (2002).
PAUTAS ETICAS INTERNACIONALES PARA LA INVESTIGACION BIOMEDICA.
Technical report, Organizacion mundial de la salud(OMS), Ginebra.
[Dick F. et al., 2012] Dick F., S., Bert U., K., Bernd G., L., and Johannes P., V. D. (2012).
High-density Surface EMG: Techniques and Applications at a Motor Unit Level. Biocy-
bernetics and Biomedical Engineering, 32(3):3–27.
[Dick F. et al., 2013] Dick F., S., Bert U., K., Bernd G., L., and Johannes P., V. D. (2013).
High-density Surface EMG: Techniques and Applications at a Motor Unit Level. Biocy-
bernetics and Biomedical Engineering, 32(3):3–27.
[Duran Acevedo and Jaimes Mogollon, 2013] Duran Acevedo, C. M. and Jaimes Mogollon,
A. L. (2013). Optimizacion y clasificacion de senales EMG a traves de metodos de reco-
nocimiento de patrones. ITECKNE, 10(1):67–76.
[Eciolaza Ferrando and Navallas Irujo, 2016] Eciolaza Ferrando, A. and Navallas Irujo, J.
(2016). Tecnicas avanzadas de scanning-EMG. PhD thesis, Universidad Publica de Na-
varra.

100 Bibliografıa
[Fang et al., 2015] Fang, Y., Liu, H., Li, G., and Zhu, X. (2015). A Multichannel Surface
EMG System for Hand Motion Recognition. International Journal of Humanoid Robotics,
12(02):1550011.
[Farina and Falla, 2008] Farina, D. and Falla, D. (2008). Estimation of muscle fiber conduc-
tion velocity from two-dimensional surface EMG recordings in dynamic tasks. Biomedical
Signal Processing and Control, 3(2):138–144.
[Farrell and ff Weir, 2008] Farrell, T. R. and ff Weir, R. F. (2008). A comparison of the effects
of electrode implantation and targeting on pattern classification accuracy for prosthesis
control. IEEE Transactions on Biomedical Engineering, 55(9):2198–2211.
[Febrer, 2014] Febrer, A. (2014). Enfermedades neuromusculares. In Rehabilitacion domici-
liaria, pages 230–240.
[Felipe Jaramillo, 2015] Felipe Jaramillo, A. A. (2015). Metodologıa para la realizacion en
paralelo de filtros de orden superior sobre procesadores digitales de senales. Technical
report, Universidad Tecnologica de Pereira, Pereira.
[Fernandez et al., 2007] Fernandez, J. M., Acevedo, R. C., and Tabernig, C. B. (2007). In-
fluencia de la Fatiga Muscular en la Senal Electromiografica de Musculos Estimulados
Electricamente. Revista EIA, 7(8):111–119.
[Fernandez Martınez, 2017] Fernandez Martınez, M. (2017). ANALISIS DE LA FORMA
DE ONDA DE LOS POTENCIALES DE ACCION DE UNIDAD MOTORA. PhD thesis,
Universidad publica de Navarra.
[Fox, 2014] Fox, S. I. (2014). El musculo. Mecanismos de contraccion y de control nervioso.
In McGraw-Hill Espana, editor, Fisiologıa humana, chapter 12. 7a. edition.
[Gallina et al., 2013] Gallina, A., Merletti, R., and Gazzoni, M. (2013). Uneven spatial
distribution of surface EMG: What does it mean? European Journal of Applied Physiology,
113(4):887–894.
[Garces et al., 2016] Garces, M., Crespo Puras, M. d. C., Finkel Morgenstern, L., Arroyo
Menendez, M., Garces, M., Crespo Puras, M. d. C., Finkel Morgenstern, L., and Arroyo
Menendez, M. (2016). Estudio sobre las enfermedades neurodegenerativas en Espana y su
impacto economico y social.
[Garcıa and Mendoza, 2014] Garcıa, J. A. and Mendoza, L. E. (2014). ADQUISICION Y
PROCESAMIENTO DE SENALES EMG PARA CONTROLAR MOVIMIENTO DE UN
BRAZO HIDRAULICO. Revista MundoFesc, 1(7):49–60.

Bibliografıa 101
[Ghaderi and Marateb, 2017] Ghaderi, P. and Marateb, H. R. (2017). Muscle Activity Map
Reconstruction from High Density Surface EMG Signals With Missing Channels Using
Image Inpainting and Surface Reconstruction Methods. IEEE Transactions on Biomedical
Engineering, 64(7):1513–1523.
[Gila et al., 2009] Gila, L., Malanda, A., Rodrıguez Carreno, I., Rodrıguez Falces, J., and
Navallas, J. (2009). Metodos de procesamiento y analisis de senales electromiograficas.
Anales del Sistema Sanitario de Navarra, 32(3):27–43.
[Gobierno Nacional Colombia, 2012] Gobierno Nacional Colombia (2012). Ley Colombiana
estatutaria 1581 de 2012.
[Greising et al., 2016] Greising, S. M., Dearth, C. L., and Corona, B. T. (2016). Regene-
rative and Rehabilitative Medicine: A Necessary Synergy for Functional Recovery from
Volumetric Muscle Loss Injury. Cells Tissues Organs, 202(3-4):237–249.
[Guyton and Hall, 2016] Guyton, A. C. and Hall, J. E. (2016). Fisiologıa de la membrana,
el nervio y el musculo. In ELSEVIER, editor, Tratado de fisiologıa medica, chapter v. 13
edition.
[Herrmann, 2016] Herrmann, S. (2016). Shoulder Biomechanics. In Reverse Shoulder Arth-
roplasty, pages 21–30. Springer International Publishing, Cham.
[Hincapie Agudelo et al., 2013] Hincapie Agudelo, T. P., Hernandez Rodriguez, P. C., Hur-
tado Lozano, L. T., Blanco Zabala, M. A., and Agudelo Martinez, A. (2013). Carac-
terizacion de las personas con discapacidad matriculadas en instituciones de atencion y
rehabilitacion, Sabaneta. PhD thesis, Universidad Autonoma de Manizales.
[Huang et al., 2020] Huang, M., Sun, L., Xu, J., and Zhang, S. (2020). Multilabel feature se-
lection using relief and minimum redundancy maximum relevance based on neighborhood
rough sets. IEEE Access, 8:62011–62031.
[Jamaluddin et al., 2016] Jamaluddin, F. N., Ahmad, S. A., Noor, S. B. M., Hassan, W.
Z. W., Yaacob, A., and Adam, Y. (2016). Performance of DWT and SWT in muscle
fatigue detection. In ISSBES 2015 - IEEE Student Symposium in Biomedical Engineering
and Sciences: By the Student for the Student, pages 50–53. Institute of Electrical and
Electronics Engineers Inc.
[Jeyalaksshmi and Prasanna, 2017] Jeyalaksshmi, S. and Prasanna, S. (2017). Measuring
distinct regions of grayscale image using pixel values. Article in International Journal of
Engineering Technology, 7(1):121–124.
[Jordanic, 2017] Jordanic, M. (2017). Muscular pattern based on multichannel surface EMG
during voluntary contractions of the upper-limb. TDX (Tesis Doctorals en Xarxa).

102 Bibliografıa
[Jordanic et al., 2017a] Jordanic, M., Rojas Martınez, M., Mananas Villanueva, M. A., and
Alonso Lopez, J. F. (2017a). Use of frequency feature of HD-EMG in identification of
upper-limb motor tasks. Cognitive Area Networks, vol. 4, no 1, Junio 2017, pages 19–22.
[Jordanic et al., 2016] Jordanic, M., Rojas-Martınez, M., Mananas, M. A., and Alonso, J. F.
(2016). Prediction of isometric motor tasks and effort levels based on high-density EMG
in patients with incomplete spinal cord injury. Journal of Neural Engineering, 13(4).
[Jordanic et al., 2017b] Jordanic, M., Rojas-Martınez, M., Mananas, M. A., Alonso, J. F.,
and Marateb, H. R. (2017b). A novel spatial feature for the identification of motor tasks
using high-density electromyography. Sensors (Switzerland), 17(7):1597.
[Kaya et al., 2019] Kaya, G. A., Ashikin, N., and Kamal, M. (2019). Feature selection for
human membrane protein type classification using filter methods. IAES International
Journal of Artificial Intelligence (IJ-AI, 8(4):375–381.
[Khezri and Jahed, 2007] Khezri, M. and Jahed, M. (2007). Real-time intelligent pattern
recognition algorithm for surface EMG signals. BioMedical Engineering Online, 6(1):45.
[Kleine et al., 2000] Kleine, B. U., Schumann, N. P., Stegeman, D. F., and Scholle, H. C.
(2000). Surface EMG mapping of the human trapezius muscle: The topography of mono-
polar and bipolar surface EMG amplitude and spectrum parameters at varied forces and
in fatigue. Clinical Neurophysiology, 111(4):686–693.
[Kraus et al., 2018] Kraus, F., Thombansen, G., Boschmann, A., Platzner, M., Witschen, L.,
and Agne, A. (2018). Zynq-based acceleration of robust high density myoelectric signal
processing. Journal of Parallel and Distributed Computing, 123:77–89.
[Laın, 2012] Laın, N. M. (2012). Reclutamiento de unidades motoras en contracciones
concentricas, isometricas y excentricas. PhD thesis, Universidad de Alcala.
[Las Heras Campos, 2016] Las Heras Campos, A. (2016). Estimacion de la VC, ZI e ID a
partir de la huella de la UM Trabajo Fin de Grado. PhD thesis, Universidad Publica de
Navarra.
[Li et al., 2018] Li, P., Liu, X., and Xiao, H. (2018). Quantum image median filtering in the
spatial domain. Quantum Information Processing, 17(3):1–25.
[Loeza, 2015] Loeza, P. (2015). Introduccion a la rehabilitacion robotica para el tratamiento
de la enfermedad vascular cerebral. Revista Mexicana de Medicina Fısica y Rehabilitacion,
27(2):44–48.
[Lucas et al., 2008] Lucas, M.-F., Gaufriau, A., Pascual, S., Doncarli, C., and Farina, D.
(2008). Multi-channel surface EMG classification using support vector machines and

Bibliografıa 103
signal-based wavelet optimization. Biomedical Signal Processing and Control, 3(2):169–
174.
[Mantilla and Santa, 2017] Mantilla, J. I. A. and Santa, J. M. (2017). Tecnologıa De Asis-
tencia: Exoesqueletos Roboticos En Rehabilitacion. Movimiento Cientıfico, 10(2):83–90.
[Marcot and Hanea, 2020] Marcot, B. G. and Hanea, A. M. (2020). What is an optimal
value of k in k-fold cross-validation in discrete Bayesian network analysis? Computational
Statistics, pages 1–23.
[Merletti et al., 2008] Merletti, R., Holobar, A., and Farina, D. (2008). Two dimensional
high density surface EMG (HD-EMG) technology and applications. In XVIIth Congress
of the International Society of Electrophysiology and Kinesiology (ISEK), pages 1–4. Re-
searchgate.
[Merletti and Parker, 2004] Merletti, R. and Parker, P. P. A. (2004). Electromyography :
physiology, engineering, and noninvasive applications. IEEE Press.
[Michael and Sircar, 2012] Michael, J. and Sircar, S. (2012). Fisiologıa del musculo. In
Fisiologıa humana, chapter III, pages 74–85. Manual Moderno.
[Middaugh et al., 2013] Middaugh, S., Thomas, K., Smith, A., McFall, T., and Klingmueller,
J. (2013). EMG Biofeedback and Exercise for Treatment of Cervical and Shoulder Pain
in Individuals with a Spinal Cord Injury: A Pilot Study. Topics in Spinal Cord Injury
Rehabilitation, 19(4):311–323.
[Mills, 2005] Mills, K. R. (2005). The basics of electromyography.
[Ministerio de Salud, 1993] Ministerio de Salud (1993). RESOLUCION NUMERO 8430 DE
1993. Technical report, Republica de Colombia, Bogota.
[Mohr et al., 2018] Mohr, M., Schon, T., von Tscharner, V., and Nigg, B. M. (2018). In-
termuscular coherence between surface EMG signals is higher for monopolar compared to
bipolar electrode configurations. Frontiers in Physiology, 9(MAY).
[Mondelli et al., 2014] Mondelli, M., Aretini, A., and Greco, G. (2014). Knowledge of elec-
tromyography (EMG) in patients undergoing EMG examinations. Functional neurology,
29(3):195–200.
[Mondragon and Saravia, 2013] Mondragon, A. and Saravia, S. (2013). ANALISIS EN EL
CONTEXTO COLOMBIANO DE LA POLITICA PUBLICA EN DISCAPACIDAD Y
LA SALUD. Technical report, Universidad CES.

104 Bibliografıa
[Montoya et al., 2015] Montoya, M., Munoz, J., and Henao, O. (2015). Surface EMG ba-
sed muscle fatigue detection using a low-cost wearable sensor and amplitude-frequency
analysis. Actas de Ingenierıa, 1:29–33.
[Moreno Sanz, 2017] Moreno Sanz, A. (2017). PROCESADO AVANZADO DE SENAL
EMG. PhD thesis, Universidad Carlos III de Madrid, Escuela politecnica superior.
[Nawab et al., 2010] Nawab, S. H., Chang, S.-S., and De Luca, C. J. (2010). High-yield
decomposition of surface EMG signals. Clinical Neurophysiology, 121(10):1602–1615.
[Nazmi et al., 2016] Nazmi, N., Rahman, M. A. A., Yamamoto, S. I., Ahmad, S. A., Zamzuri,
H., and Mazlan, S. A. (2016). A review of classification techniques of EMG signals during
isotonic and isometric contractions.
[Newport, 2006] Newport, R. (2006). Ventajas de la rehabilitacion asistida mediante robot
en la recuperacion de las funciones motriz y visuoespacial en pacientes en fase de recu-
peracion de un accidente cerebrovascular. Revista Espanola de Geriatrıa y Gerontologıa,
41:66–73.
[Orozco Gutierrez et al., 2005] Orozco Gutierrez, A. A., Giraldo Suarez, E., and Betancourt
Orozco, G. A. (2005). Determinacion de movimientos a partir de senales electromiograficas
utilizando maquinas de soporte vectorial. Revista Medica de Risaralda, 11(c):15.
[Ortiz Corredor et al., 2016] Ortiz Corredor, F., Rincon Roncancio, M., and Mendoza Puli-
do, J. C. (2016). Texto de medicina fısica y rehabilitacion. El manual Moderno Colombia.
[Overeem et al., 2008] Overeem, S., van Elswijk, G., Kleine, B. U., Hekkert, K. D., Eshuis,
B., and Stegeman, D. F. (2008). Muscle imaging: Mapping responses to transcranial
magnetic stimulation with high-density surface electromyography. Cortex, 44(5):609–616.
[Palacio et al., 2013] Palacio, J. A., Agudelo, D., and Vasquez, M. (2013). Reconocimien-
to de patrones de senales emg, empleando clasificador bayesiano. Revista Politecnica,
9(16):21–26.
[Pan et al., 2015] Pan, L., Zhang, D., Jiang, N., Sheng, X., and Zhu, X. (2015). Improving
robustness against electrode shift of high density EMG for myoelectric control through
common spatial patterns. Journal of NeuroEngineering and Rehabilitation, 12(1):110.
[Parodi Feye, 2017] Parodi Feye, A. S. (2017). Analisis crıtico de la Ley de Henneman.
Educacion Fısica y Ciencia, 19(2).
[Phinyomark et al., 2013] Phinyomark, A., Quaine, F., Charbonnier, S., Serviere, C., Tarpin-
Bernard, F., and Laurillau, Y. (2013). EMG feature evaluation for improving myoelectric
pattern recognition robustness. Expert Systems with Applications, 40(12):4832–4840.

Bibliografıa 105
[Phinyomark and Scheme, 2018] Phinyomark, A. and Scheme, E. (2018). EMG Pattern Re-
cognition in the Era of Big Data and Deep Learning. Big Data and Cognitive Computing,
2(3):21.
[Quinayas-Burgos and Gaviria-Lopez, 2015] Quinayas-Burgos, C. A. and Gaviria-Lopez,
C. A. (2015). Sistema de identificacion de intencion de movimiento para el control
mioelectrico de una protesis de mano robotica. Ingenieria y Universidad, 19(1):27–50.
[Quintero Rincon et al., 2012] Quintero Rincon, A., Risk, M., and Liberczuk, S. (2012). Pre-
procesamiento de EEG con Filtros Hampel. IEEE Latin America Transactions, 2021(89).
[Reaz et al., 2006] Reaz, M. B. I., Hussain, M. S., and Mohd-Yasin, F. (2006). Techniques
of EMG signal analysis: detection, processing, classification and applications (Correction).
Biological Procedures Online, 8(1):163–163.
[Rıos Garcıa, Marilia, Solıs de la Paz, Dayma, Oviedo Bravo, Ariel, Boza Santos, Ismael, Valdes Gonzalez, 2013]
Rıos Garcıa, Marilia, Solıs de la Paz, Dayma, Oviedo Bravo, Ariel, Boza Santos, Ismael,
Valdes Gonzalez, A. A. (2013). Behavior of the patients with cerebrovascular disease
at the Rehabilitation Service of the Military Hospital of Matanzas. Revista Medica
Electronica, 35(4):331–339.
[Rohrer et al., 2006] Rohrer, B., Palazzolo, J. J., Lynch, D., Krebs, H. I., Hogan, N., Stein,
J., Fasoli, S. E., Frontera, W. R., Dipietro, L., Volpe, B. T., and Hughs, R. (2006). Motions
or muscles? Some behavioral factors underlying robotic assistance of motor recovery. The
Journal of Rehabilitation Research and Development, 43(5):605.
[Rojas-Martınez et al., 2017] Rojas-Martınez, M., Alonso, J. F., Jordanic, M., Romero, S.,
and Mananas, M. A. (2017). Identificacion de Tareas Isometricas y Dinamicas del Miembro
Superior Basada en EMG de Alta Densidad. RIAI - Revista Iberoamericana de Automatica
e Informatica Industrial, 14(4):406–411.
[Rojas-Martınez et al., 2012] Rojas-Martınez, M., Mananas, M. A., and Alonso, J. F. (2012).
High-density surface EMG maps from upper-arm and forearm muscles. Journal of Neu-
roEngineering and Rehabilitation, 9(1):85.
[Rojas Ruiz et al., 2017] Rojas Ruiz, J. E., Gonzalez Lopez, J. A., and Camargo Casallas,
L. H. (2017). Tecnicas empleadas en el estudio de enfermedades gastricas. Vision electroni-
ca, 11(1):99–105.
[Romo et al., 2007] Romo, H. A., Realpe, J. C., and Jojoa, P. E. (2007). Surface EMG
Signals Analysis and Its Applications in Hand Prosthesis Control. Avances en Sistemas e
Informatica, 4(1):127–136.

106 Bibliografıa
[Saeed et al., 2021] Saeed, B., Zia-ur Rehman, M., Gilani, S. O., Amin, F., Waris, A., Jamil,
M., and Shafique, M. (2021). Leveraging ANN and LDA Classifiers for Characterizing
Different Hand Movements Using EMG Signals. Arabian Journal for Science and Engi-
neering, 46(2):1761–1769.
[Sandoval Rodriguez, 2013] Sandoval Rodriguez, C. (2013). Caracterizacion de la dinami-
ca de los movimientos basicos de la mano a partir de la actividad electromiografica del
antebrazo. PhD thesis, Universidad Industrial de Santander.
[Sandoval Rodriguez et al., 2007] Sandoval Rodriguez, C., Villamizar Mejıa, R., Delgado
Veloza, E., and Cordero Cardozo, A. (2007). ESTIMACION DE VELOCIDAD DEL
MOVIMIENTO DE MANO USANDO REDES NEURONALES ARTIFICIALES Y ME-
DICIONES ELECTROMIOGRAFICAS, volume 3. Escuela de Ingenieria de Antioquia,
Universidad CES.
[Sayyadi Shahraki and Zahiri, 2021] Sayyadi Shahraki, N. and Zahiri, S. H. (2021). DRLA:
Dimensionality ranking in learning automata and its application on designing analog active
filters. Knowledge-Based Systems, 219:106886.
[Scheme and Englehart, 2011] Scheme, E. and Englehart, K. (2011). Electromyogram pat-
tern recognition for control of powered upper-limb prostheses: State of the art and cha-
llenges for clinical use. Journal of Rehabilitation Research Development, 48(6):643–660.
[Sebastian et al., 2017] Sebastian, F., Fu, Q., Santello, M., and Polygerinos, P. (2017). Soft
Robotic Haptic Interface with Variable Stiffness for Rehabilitation of Neurologically Im-
paired Hand Function. Frontiers in Robotics and AI, 4(DEC).
[Silva and Rojas, 2010] Silva, C. V. and Rojas, V. G. (2010). Design and implementation of
a digital electrocardiographic system. Revista Facultad de Ingenieria, 55(55):99–107.
[Stango et al., 2015] Stango, A., Negro, F., and Farina, D. (2015). Spatial Correlation of
High Density EMG Signals Provides Features Robust to Electrode Number and Shift in
Pattern Recognition for Myocontrol. IEEE Transactions on Neural Systems and Rehabi-
litation Engineering, 23(2):189–198.
[Staudenmann et al., 2009] Staudenmann, D., Kingma, I., Daffertshofer, A., Stegeman,
D. F., and van Dieen, J. H. (2009). Heterogeneity of muscle activation in relation to
force direction: A multi-channel surface electromyography study on the triceps surae mus-
cle. Journal of Electromyography and Kinesiology, 19(5):882–895.
[Stephenson and Stephens, 2018] Stephenson, A. and Stephens, J. (2018). An exploration
of physiotherapists’ experiences of robotic therapy in upper limb rehabilitation within a
stroke rehabilitation centre. Disability and Rehabilitation: Assistive Technology, 13(3):245–
252.

Bibliografıa 107
[Tkach et al., 2010] Tkach, D., Huang, H., and Kuiken, T. A. (2010). Study of stability of
time-domain features for electromyographic pattern recognition. Journal of NeuroEngi-
neering and Rehabilitation, 7(1):21.
[Togacar et al., 2020] Togacar, M., Ergen, B., and Comert, Z. (2020). Detection of lung can-
cer on chest CT images using minimum redundancy maximum relevance feature selection
method with convolutional neural networks. Biocybernetics and Biomedical Engineering,
40(1):23–39.
[Tucker et al., 2009] Tucker, K., Falla, D., Graven-Nielsen, T., and Farina, D. (2009). Elec-
tromyographic mapping of the erector spinae muscle with varying load and during sustai-
ned contraction. Journal of Electromyography and Kinesiology, 19(3):373–379.
[Vazquez B. and Caceres, 2008] Vazquez B., A. and Caceres, N. (2008). El abordaje de la
discapacidad desde la atencion primaria en salud. Technical report, Organizacion Pan-
americana de la Salud.
[Wang et al., 2004] Wang, Z., Bovik, A. C., Rahim Sheikh, H., and Simoncelli, E. P.
(2004). Image Quality Assessment: From Error Visibility to Structural Similarity. IEEE
TRANSACTIONS ON IMAGE PROCESSING, 13(4).
[Watanabe et al., 2015] Watanabe, K., Kouzaki, M., and Moritani, T. (2015). Spatial EMG
potential distribution of biceps brachii muscle during resistance training and detraining.
European Journal of Applied Physiology, 115(12):2661–2670.
[Wattanaprakornkul et al., 2011] Wattanaprakornkul, D., Cathers, I., Halaki, M., and Ginn,
K. A. (2011). The rotator cuff muscles have a direction specific recruitment pattern
during shoulder flexion and extension exercises. Journal of Science and Medicine in Sport,
14(5):376–382.
[Zecca et al., 2002] Zecca, M., Micera, S., Carrozza, M. C., and Dario, P. (2002). Control
of Multifunctional Prosthetic Hands by Processing the Electromyographic Signal. Critical
Reviews in Biomedical Engineering, 30(4):459–485.
[Zheng and Hu, 2019] Zheng, Y. and Hu, X. (2019). Interference removal from electromyo-
graphy based on independent component analysis. IEEE Transactions on Neural Systems
and Rehabilitation Engineering, 27(5):887–894.
[Zivanovic and Gonzalez-Izal, 2013] Zivanovic, M. and Gonzalez-Izal, M. (2013). Simulta-
neous powerline interference and baseline wander removal from ECG and EMG signals by
sinusoidal modeling. Medical Engineering and Physics, 35(10):1431–1441.
[Zwarts and Stegeman, 2003] Zwarts, M. J. and Stegeman, D. F. (2003). Multichannel sur-
face EMG: Basic aspects and clinical utility.
Copyright © 2022 FDOKUMEN




















