MAGAZIN - NAFEMS
39
1 NAFEMS Magazin 1/2005 MAGAZIN Juli 2005 – Ausgabe 1 Zeitschrift für numerische Simulationsmethoden und angrenzende Gebiete FEM – CFD – MKS – VR / VIS – PROZESS – PDM Fachbeiträge: Fokus Mehrkörpersimulation Elastische Komponenten in MKS-Tools am Beispiel von alaska Seite 12 Körperschalluntersuchung einer diesel- hydraulischen Antriebsanlage mit FEM und MKS Seite 18 Einsatz flexibler Körper in der numeri- schen Lebensdauersimulation von Kraftfahrzeugen: Methoden, Beispiele und offene Fragen Seite 21 Fokus Computational Fluid Dynamics (CFD) Simulation von Strömungen in komplexen Geometrien Seite 32 Simulation der Interaktion eines Frei- strahls mit einem rotierenden Pelton- Becher Seite 35 Bild: Volkswagen AG Bild: CD-adapco
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of MAGAZIN - NAFEMS

1NAFEMS Magazin 1/2005
MAGAZIN
Juli 2005 – Ausgabe 1
Zeitschrift für numerische Simulationsmethoden und angrenzende Gebiete
FEM – CFD – MKS – VR / VIS – PROZESS – PDM
Fachbeiträge:
Fokus Mehrkörpersimulation
Elastische Komponenten in MKS-Tools
am Beispiel von alaska Seite 12
Körperschalluntersuchung einer diesel-
hydraulischen Antriebsanlage mit FEM
und MKS Seite 18
Einsatz flexibler Körper in der numeri-
schen Lebensdauersimulation von
Kraftfahrzeugen: Methoden, Beispiele
und offene Fragen Seite 21
Fokus Computational Fluid
Dynamics (CFD)
Simulation von Strömungen in
komplexen Geometrien Seite 32
Simulation der Interaktion eines Frei-
strahls mit einem rotierenden Pelton-
Becher Seite 35
Bild: Volkswagen AG
Bild: CD-adapco
2 NAFEMS Magazin 1/2005
Vorwort des Editor in Chief
NAFEMS Magazin, eine Online-Information überSicherheit und Zuverlässigkeit auf dem Gebiet dernumerischen Simulation
Die Simulation von Vorgängen, sei es in der Natur oder in der technischen Anwendung, gewinnt eine immerstärkere Bedeutung für die Abschätzung von Folgen der Ereignisse und Maßnahmen sowie für die Entscheidungüber Konsequenzen daraus. Mit der rasanten Entwicklung der Rechenkapazitäten hat sich die Diskretisierung alsunverzichtbares Werkzeug für die Simulation herausgestellt. Je nach Anwendungsbereich haben sich unterschied-liche Diskretisierungsverfahren herausgebildet; als Beispiele sollen hier genannt werden: Methode der FinitenElement, Randelementmethode, Finite Differenzenverfahren, Finite Volumen, Methode der gewichteten Residuen.
Über den wissenschaftlichen Fortschritt bei der Entwicklung und der Anwendung dieser Verfahren wird in denrelevanten Fachzeitschriften angemessen berichtet. Hier gibt es eher einen Überschuss als einen Mangel anInformation. Worüber weniger intensiv informiert wird sind Erfahrungen hinsichtlich Sicherheit und Zuverlässigkeitder jeweiligen Methoden und Verfahren oder auch spezieller Werkzeuge. Als neutrale, von Soft- und Hardware-Anbietern unabhängige internationale Organisation hat NAFEMS sich dies zu ihrer Hauptaufgabe gemacht. Siestrebt dieses Ziel an zum Beispiel mit der Herausgabe von Publikationen unter Titeln wie „How to AnalyseComposites“ oder „Why Do Nonlinear Finite Element Analysis?“. Andere Maßnahmen sind die Spezifikation vonBenchmark-Aufgaben und die Veröffentlichung von Lehr- und Übungsbeispielen in der Zeitschrift BENCHmark.
Im deutschsprachigen Raum organisiert NAFEMS regelmäßig Seminare zu bestimmten Themenkreisen, in denenAnwender und Sofware-Ersteller ihre Erfahrungen austauschen. Diese Seminare haben sich zu einer anerkann-ten und bewährten Informationsbörse entwickelt. Um zumindest einen Teil der dort gehandelten Erkenntnisseeinem größeren Nutzerkreis zur Verfügung stellen zu können, wurde die Herausgabe eines online-Magazin be-schlossen, dessen erstes Heft Ihnen hier vorliegt. Neben Branchen-News und Hinweisen zu relevanten Veranstal-tungen enthält es herausragende Seminar-Vorträge von allgemeinem Interesse. Für das vorliegende Heft wurdendrei Vorträge aus dem Seminar „Analyse von Mehrkörpersystemen mit FEM und MKS“ und zwei Vorträge aus demSeminar „Die Simulation komplexer Strömungsvorgänge (CFD)“ ausgewählt. Die Beiträge verdeutlichen, wie pra-xisnah und kompetent in dem Magazin informiert wird. Reaktionen aus der Leserschaft, Kritik, Stellungnahmenoder eigene Beiträge sind ausdrücklich erwünscht.
Es ist vorgesehen, das online-Magazin regelmäßig im Abstand von einigen Monaten im Internet zugänglich zumachen. Die angesprochenen Themenkreise werden wechseln und damit die gesamte Bandbreite der numeri-schen Simulation umfassen. Herausgeber und Redaktion stellen sich die Aufgabe, Wissen und Erfahrung ausdem Anwenderbereich der Simulation weiterzugeben und sie damit sicherer und zuverlässiger zu machen.
Prof. Dr. Klaus Rohwer
Editor-in-Chief
VORWORT
3NAFEMS Magazin 1/2005
VORWORT
Vorwort des Chairman des deutschen NAFEMS Steering Committees
Sehr geehrtes NAFEMS-Mitglied,
Ihnen liegt die erste Ausgabe des NAFEMS-Magazins vor. Sie werden sagen: schon wieder ein neues Informati-onsblatt – das ist wohl richtig. Sie wissen, dass NAFEMS als neutrale Institution gegründet wurde, um die Anwen-dung und den Einsatz von Berechnungsverfahren zu unterstützen. Als Leistungen stehen Ihnen Angebote vonunterschiedlichen Publikationen, Seminaren, Trainingskurse usw. zur Verfügung. Selbstverständlich ist NAFEMSstets bemüht, seinen Mitgliedern ein aktuelles Spektrum an Informationen und Entwicklungen auf dem Gebiet dernumerischen Simulation zur Verfügung zu stellen.
Angeregt durch Umfragen bei den Mitgliedern hat deshalb des deutsche Steering Committee beschlossen, alszusätzliche Leistung ein online-Magazin zu konzipieren. Sie sollen damit Fachinformationen erhalten in Formausgewählter Vorträge von NAFEMS-Seminaren, aber auch allgemeine Informationen, z. B. über geplanten Ver-anstaltungen zum Thema Berechnung. Natürlich finden Sie hier auch das aktuelle Leistungsangebot von NAFEMS– Sie werden über deren Fülle staunen!
Entsprechend dem Anspruch von NAFEMS ist es wesentlich, die Neutralität des Inhalts dieses Magazins zu wah-ren. Herr Prof. Rohwer als Mitglied des Steering Committees hat sich bereit erklärt, die Rolle des Herausgebers zuübernehmen. Verantwortlich für den Inhalt ist das deutsche Steering Committee.
Im Namen des deutschen Steering Committee wünsche ich Ihnen viel Spaß beim Lesen. Sehr freuen würden wiruns über Anregungen und Kritiken und dass Sie das Positive weiter sagen!
Dr. Werner DirschmidVorsitzender des deutschen Steering Committees
NAFEMS Literaturgeplant:
• Dynamic Response of Visco-elastic Polymeric Materials
• How to Undertake SeismicAnalysis
• CFD Journal• Road Map to NAFEMS
documents• Dynamics How To• How to Analyse Practical
Problems• Electronic CFD Jargon
Booklet• Introduction to Material
Models• Why Do Multiphysics´• How to Undertake a Smoke
Movement Analysis inComplex Enclosed Spaces
kürzlich erschienen:
• Why Do Boundary ElementAnalysis?
• How To Use ElementsEffectively
• How To Analyse Composites• Why Do CFD?• An Explicit Finite Element
Primer• Why Do Design
Optimisation?• Benchmarks for Composite
Delamination• How To Undertake FE Based
Geotechnical Analysis• How To Understand CFD
Jargon• Benchmarks for Radiation &
Scattering of Sound• How To Plan a CFD Analysis
• How to Use Beam, Plate &Shell
• Pressure Vessel Design Codes• Modelling Engineering Joints• Buckling and Collapse How to• Concrete How to• Turbulence Workbook
Mehr Informationen unterwww.nafems.org/publications

4 NAFEMS Magazin 1/2005
SPONSOREN
Wir bedanken uns herzlich bei den Sponsoren, ohne deren Unterstützung
ein solches Magazin nicht realisierbar wäre:
www.abaqus.de www.altair.de www.cfx-germany.com
www.fujitsu-siemens.de www.hewlett-packard.de www.intes.de
www.lmsintl.comwww.simpack.com
Die nächsten NAFEMS Trainingskurse:
Basiswissen für die Anwendung von Finite-Element-Berechnungen fürIngenieure und Konstrukteure
Basic 1:Praxisorientierte Strukturmechanik / Festigkeitslehre 17. - 18.10.2005Wiesbaden, D
Basic 2:Praxisorientierte Grundlagen für FEM-Analysen 21. - 22.11.2005Wiesbaden, D
Das nächste NAFEMS Seminar:
Numerische Simulation elektromechanischer Systeme 26. - 27.10.2005Wiesbaden, D
Mehr Infos finden Sie unter www.nafems.de
5NAFEMS Magazin 1/2005
INHALT
Vorwort des Editor in Chief ..................................................................... 2
Vorwort des Chairman des deutschen NAFEMSSteering Committees ............................................................................... 3
Sponsoren ................................................................................................ 4
Impressum ................................................................................................ 5
Inhalt ......................................................................................................... 5
Über NAFEMS / Mitgliedschaft ............................................................... 6
Neuigkeiten......................................................................................... 7 - 9
Veranstaltungen ..............................................................................10 - 11
Fachbeiträge:
Fokus Mehrkörpersimulation (MKS)
Elastische Komponenten in MKS-Tools amBeispiel von alaska ........................................................................ 12 - 17
Peter Maißer, Uwe Jungnickel, Thomas Grund(Institut für Mechatronik e.V., Chemnitz)
Körperschalluntersuchung einer dieselhydraulischen Antriebs-anlage mit FEM und MKS .............................................................. 18 - 20
Thomas Walter(Voith Turbo GmbH & Co. KG)
Einsatz flexibler Körper in der numerischen Lebensdauersimulationvon Kraftfahrzeugen:Methoden, Beispiele und offene Fragen ..................................... 21 - 31
Alexander Lion(Volkswagen AG)
Fokus Computational Fluid Dynamics (CFD)
Simulation von Strömungen in komplexen Geometrien ........... 32 - 34
Milovan Peric(CD-adapco)
Simulation der Interaktion eines Freistrahls mit einemrotierenden Pelton-Becher ........................................................... 35 - 38
Felix A. Muggli, Torsten Wintergerste(Sulzer Markets and Technology AG);Etienne Parkinson(VA Tech Hydro SA)
Rückmeldeformular ............................................................................... 39
Impressum
Editor in ChiefProf. Dr. Klaus Rohwer(Deutsche Zentrum für Luft- undRaumfahrt e.V.)
Redaktioneller Beirat• Dr. Yasar Deger (HSR, CH)• Dr. Moris Habip (Consultant, D)• Dr. Alfred Svobodnik (NAD GmbH
& Co.KG, A)• Prof. Dr. Manfred Zehn (Univ.
Magdeburg / Femcos mbH, D)
RedaktionAlbert Oswald (NAFEMS KontaktDeutschland. Österreich, Schweizund Nordic)
HerausgeberNAFEMS Kontakt DACH & NordicSchillerstr. 6, D-85567 GrafingTel. +49 (0) 8092 – 8 35 50Fax +49 (0) 8092 – 8 35 51e-mail: [email protected]
Gestaltung / Layout / GrafikWerbos GbRSchillerstr. 6, D-85567 GrafingTel. +49 (0) 8092 – 8 35 50Fax +49 (0) 8092 – 8 35 51e-mail: [email protected]
BezugspreisKostenlos
Verteilung / BezugPer e-mail an NAFEMS DatenbasisDACH und als Download überwww.nafems.de. Bezug durchAufnahme in den Verteiler.
AnzeigenpreisePreisliste vom 19.07.2005
Copyright ��2005 NAFEMS KontaktDACH & NORDIC, Werbos GbR.Nachdruck – auch auszugsweise -, Ver-vielfältigung oder sonstige Verwertungist nur mit schriftlicher Genehmigungdes Verlages unter ausdrücklicherQuellenangabe gestattet. Gekenn-zeichnete Artikel stellen die Meinungdes Autors, nicht unbedingt die Mei-nung der Redaktion dar. Für unverlangteingesandte Manuskripte und Daten-träger sowie Fotos übernehmen wir kei-ne Haftung. Alle Unterlagen, insbeson-dere Bilder, Zeichnungen, Prospekteetc. müssen frei von Rechten Drittersein. Mit der Einsendung erteilt der Ver-fasser / die Firma automatisch die Ge-nehmigung zum kostenlosen weiterenAbdruck in allen Publikationen vonNAFEMS, wo auch das Urheberrechtfür veröffentlichte Manuskripte bleibt.
Eine Haftung für die Richtigkeit derVeröffentlichungen kann trotz Prüfungdurch die Redaktion vom Herausgebernicht übernommen werden.

6 NAFEMS Magazin 1/2005
NAFEMS / MITGLIEDSCHAFT
Über NAFEMS
NAFEMS ist eine gemeinnützige Organisation zur För-derung der sicheren und zuverlässigen Anwendungvon Simulationsmethoden wie FEM und CFD.
1983 in Großbritannien gegründet, hat sich die Orga-nisation längst in eine internationale Gesellschaft zurFörderung der rechnerischen Simulation entwickelt. MitNAFEMS ist die neutrale und von Software- und Hard-wareanbietern unabhängige Institution entstanden.
NAFEMS vertritt die Interessen der Anwender aus derIndustrie, bindet Hochschulen und Forschungsinstitutein ihre Tätigkeit ein und hält Kontakt zu Systeman-bietern.
Mitglieder des Internationalen NAFEMS Councils
Costas Stavrinidis (Niederlande), ChairmanManfred Zehn (Deutschland), Vice ChairmanDavid Ellis (United Kingdom)Giuseppe Miccolli (Italien)Stewart Morrison (United Kingdom)Paul Newton (United Kingdom)Marie-Christine Oghly (Frankreich)Anup Puri (United Kingdom)Grant Steven (Australien)
Um die Aktivitäten von NAFEMS im deutschsprachi-gen Raum neutral zu leiten und die nationalen Belan-ge innerhalb der NAFEMS zu vertreten, wurde einLenkungsausschuss etabliert.
Mitglieder des deutschen NAFEMS SteeringCommittees
Dr.-Ing. Werner Dirschmid (Consultant), ChairmanProf. Dr.-Ing. Herbert Bauer (Fachhochschule Aalen)Dr.-Ing. Yasar Deger (HSR)Dr.-Ing. Reinhard Helfrich (Intes GmbH)Dipl.-Ing. Gerhard Müller (Siemens AG)Dr.-Ing. Günter Müller (CADFEM GmbH)Frans J. H. Peeters (Abaqus Europe BV)Dipl.-Ing. Albrecht Pfaff (MSC.Software GmbH)Prof. Dr.-Ing. Klaus Rohwer (DLR)Dr. Alfred J. Svobodnik (NAD GmbH & Co.KG)Prof. Dr.-Ing. habil. Manfred Zehn (Femcos mbH)
Der NAFEMS Kontakt für DACH und Nordic wieauch die Realisierung der Aktivitäten werden vonder Werbos GbR übernommen.
Mitglied bei NAFEMS?
NAFEMS hat über 650 Mitgliedsunternehmen und -Institutionen in 37 Ländern.
NAFEMS Mitglieder erhalten unter anderem:
- Benchmark (Internationales FEM-Magazin)- Literatur- Zwei freie Seminarplätze pro Jahr- Ermäßigungen für Trainingskurse, Kongressse und
Literatur- Zugriff auf passwortgeschützen Webbereich mit
Kontaktmöglichkeiten und Informationen- Kontakt zu über 700 Organisationen weltweit
Werden auch Sie Mitglied !
„Benchmark“– das internationaleNAFEMS Magazin
Jetzt abonnieren– für NAFEMS-Mitglieder natürlich frei!
Weitere Informationen erhalten Sie unter:
www.nafems.de(national)
www.nafems.org(international)

7NAFEMS Magazin 1/2005
NEUIGKEITEN
Abaqus
Dassault Systèmes kauftAbaqus, Inc.Die Firma Abaqus, Inc. wird vorbe-haltlich der Genehmigung der zu-ständigen Kontrollbehörden von derFirma Dassault Systèmes gekauftwerden. Kaufpreis: rund 413 Mio.USD in bar. Dassault kündigt unterdem Namen „Simulia“ eine „offenePlattform“ an, die als Integrations-basis für alle Arten von Simulations-programmen dienen soll. Dassaultwill damit Struktur in einen Marktbringen, der stark fragmentiert undvon vielen Spezialapplikationen ge-kennzeichnet ist.
www.abaqus.com/www.3ds.com
Abaqus gibt Student Edition derVersion 6.5 freiDie Abaqus Student Edition ist dasgeeignete Werkzeug, um sich imRahmen des Studiums oder einersonstigen persönlichen Fortbildungmit dem Programmsystem Abaqusvertraut zu machen. Die Abaqus Stu-dent Edition hat Einschränkungen inder Modellgröße und der Anbindungvon Benutzerunterprogrammen, be-inhaltet aber sonst die komplettenAnwendungsmöglichkeiten von Aba-qus/Standard, Abaqus/Explicit undAbaqus/CAE.www.abaqus.de/www.abaqus.com
Altair Engineering
Faurecia entscheidet sich fürHyperWorksAltair Engineering Inc., ein seit 20Jahren weltweit anerkanntes Unter-nehmen der CAE-Branche, meldetdie Unterzeichnung eines globalenAbkommens mit Faurecia, einemführenden Automobilzulieferer, der in28 Ländern vertreten ist und 60.000Personen an 160 Standorten be-schäftigt. HyperWorks – Altair ’sCAE-Software zur Unterstützungvon Ingenieuren bei der Entwicklunghoch leistungsfähiger Produkte –kann durch dieses Abkommen anden meisten Faurecia-Standortenweltweit eingesetzt werden. „DiesesAbkommen ist das Ergebnis der Zu-sammenarbeit beider Unternehmen,während der kundenspezifische Lö-sungen in enger Kooperation entwik-
kelt wurden“ erklärte Mauro Gugliel-minotti, Leiter der französischen Nie-derlassung von Altair Engineering.
www.altair.de
Ansys / Cadfem
EducationalKennenlernversion von Ansys ist seitVersion 9.0/Ende März 2005 erst-mals mit der BenutzerumgebungAnsys Workbench verfügbar. Um-fangreiche Erweiterung des Funk-tionsspektrums und Workbench Be-nutzeroberfläche der neuen AnsysEducational (ED) Version gehen miteiner spürbaren Preissenkung ein-her. Die im März 2005 erschieneneVersion 9.0 enthält erstmals nebender klassischen Oberfläche zusätz-lich die Workbench-Benutzerumge-bung sowie viele Workbench-Zu-satzmodule.
www.cadfem.de/www.ansys.com
Simulation mit Ansys 10.0Im Juli 2005 bringt Ansys, Inc. dieVersion 10.0 des Berechnungs-paketes Ansys auf den Markt. Einherausragendes Merkmal von Ansysist die Verfügbarkeit unterschiedli-cher Berechnungsdisziplinen in ei-nem prozessorientierten Programm.Das erweist sich besonders bei ge-koppelten Simulationen (z. B. Fluid-Struktur), die durch die Berücksich-tigung von Wechselwirkungen be-sonders realitätsnah sind, als sehrvorteilhaft. Durch die Unterstützungder neuen 64-bit Prozessortechno-logie können nun auch extrem gro-ße Modelle unter Windows gelöstwerden.
www.cadfem.de/www.ansys.com
CD-adapco
Star-CD v3.24 für WindowsfreigegebenCD-adapco hat die Star-CD Versionv3.24 für Windows freigeben. DieVersion enthält einige neue Featureswie zum Beispiel ein 3 Zone Exten-ded Coherent Flame Model (ECFM-3Z) combustion model.
www.cd-adapco.com
Dynamore
Neue LS-Dyna Support-SiteUnter www.dynasupport.com ist seitdem 1. Juni 2005 die neue, interna-tionale LS-Dyna Support-Site online.Die von der Dynamore GmbH, Dis-tributor von LS-Dyna im deutsch-sprachigen Raum, in Kooperationmit LSTC, dem amerikanischen Soft-wareentwickler von LS-Dyna, ange-botene Support-Site bietet ein um-fassendes und kompetentes Infor-mationssystem zur FEM-Berech-nungssoftware LS-Dyna, einem derweltweit führenden Programme zurSimulation von Crash, Insassen undFußgängerschutz, Impakt und Um-formung. Neben allgemeinen Infor-mationen, wie z. B. FAQ, Tutorials,Release-Notes, werden Links zuumfangreichen Beispielsammlungenund Anwenderberichten (Konferenz-beiträge) bereitgestellt. Für den Zu-gang ist kein spezielles Login erfor-derlich – alle Informationen stehenkostenfrei zur Verfügung.
www.dynamore.de
FE-Design
Neue Funktionalitäten mit demRelease 5.1 von OptimusDer Hersteller Noesis NV kündigt fürEnde Juni 2005 das neue Release5.1. seines parametrischen Prozess-und Designoptimierers Optimus mitüber 200 Verbesserungen an. Un-ter anderem wurde ein komplett neu-es Modul Multi-Objective Optimi-zation zur multi-kriteriellen Optimie-rung mit neun wählbaren Optimie-rungsmethoden konzipiert.
www.fe-design.de
Fluent
Fluent Version 6.2 freigegebenGegenüber der Vorgängerversionbietet das neue Release mehr als300 Erweiterungen, die neue An-wendungsmöglichkeiten in allen In-dustriebereichen eröffnen. Entschei-dende Verbesserungen des FluentLösers führen zu deutlichen Ge-schwindigkeitssteigerungen und grö-ßerer Genauigkeit, ohne dabei Ro-bustheit oder Anwenderfreundlich-keit zu beeinträchtigen.
www.fluent.de

8 NAFEMS Magazin 1/2005
NEUIGKEITEN
Fraunhofer SCAI
Fraunhofer-SCAI präsentiert Ver-sion 3 des KopplungsprogrammsMpCCIMit MpCCI 3.0.4 liegt eine neue undstark verbesserte Version der erfolg-reichen und flexibel einsetzbarenSoftware zur Kopplung von Simula-tionsprogrammen vor. Neu an Ver-sion MpCCI 3.0 ist die Kompatibili-tät zu den Simulationscodes vonAbaqus, Ansys, Fluent, StarCD, Per-mas und Radtherm. Künftige Versio-nen ab MpCCI 3.0.4 werden auchdie Codes von Ansys/CFX, MSC.Marc und MSC.Nastran unterstüt-zen. Die Software ist in der LageSimulationscodes verschiedenerHersteller zu koppeln, um damitmultidisziplinäre Probleme zu lösen– Probleme also, die aus zwei odermehr voneinander abhängigen phy-sikalischen Phänomenen bestehen.MpCCI (Mesh-based parallel CodeCoupling Interface) sorgt für den Da-tenaustausch und die Interpolationder Daten zwischen den Simulati-onsprogrammen.
www.scai.fraunhofer.de
Hewlett-Packard
HPs Unified Cluster Portfolio -Speicherkapazitätserhöhungund Kostensenkung im HPCAuf der Supercomputing Conferenceim Juni 2005 stellte HP neue Pro-dukte und Partner-Updates für ihrHigh-Performance Computing Uni-fied Cluster Portfolio vor. Dazu ge-hören u. a. HP StorageWorks Sca-lable File Share (HP SFS) 2.0, einLinux-Cluster Fileserver mit niedri-gem Einstiegspreis, der die Ge-schwindigkeit verdreifacht und dieSpeicherkapazität verdoppelt, sowieVerbesserungen in der Software HPXC System Software and HP Clu-ster Platform Systems. Das HP Uni-fied Cluster Portfolio ist eine modu-lar aufgebaute Lösung bestehendaus ideal aufeinander abgestimmterHardware, Software und Dienstlei-stung. Es ermöglicht dem Anwenderbessere Bedienbarkeit, Speiche-rung, Zugriff und Visualisierung vongroßen Datenvolumen, wie sie beinumerischen Simulationen anfallen.
www.hp.com
Intec
Neues Simpack Modul zur Simu-lation von MotorenBislang von führenden Formel 1Teams in der Auslegung der Dyna-mik von Rennmotoren verwendet,steht das neuen Modul SimpackEngine nun auch für den Einsatz inder Serienmotorenentwicklung zurVerfügung. Mit einer breit gefächer-ten Funktionspalette kann die Dyna-mik von Ventil-, Kurbel- und Steuert-rieb einzeln oder auch im Verbunddes Gesamtmotors simuliert werden.Schwingungsphänomene bis in denakustischen Bereich oder auch dieErmittlung von dynamischen Lastenzur Lebensdaueranalyse sind nureinige der vielfältigen Analysemög-lichkeiten. Der Einfluss von Struktur-elastizitäten in den Wellen, Ventil-federn und Kipphebeln wird exaktabgebildet. Dazu stehen effizienteInterfaces zu allen gängigen FE-Pro-grammen zur Verfügung. Hochge-naue Modelle für den Rädertrieb undden Kettentrieb mit extrem kurzenSimulationszeiten erlauben die ge-naue Abbildung der aus diesen Sy-stemen induzierten Schwingungenund Einflüsse auf die Ventilsteue-rung. Ein integriertes (E)HD Modulzur Berücksichtigung hydrodynami-scher Effekte in Wechselwirkung mitglobalen Bauteilverformungen run-den das Modul Simpack Engine ab.
www.simpack.com
Intes
Forschungsprojekt Auto-OPTmit großem Erfolg abgeschlos-senVon 2002 bis 2005 wurde unter Lei-tung des Fraunhofer-Institutes SCAIdas vom BMBF geförderte For-schungsprojekt Auto-OPT (Automo-bilentwurf durch Simulation und Op-timierung) durchgeführt. Am 27. Juni2005 fand dieses Projekt mit einergroßen Veranstaltung bei Porsche inWeissach seinen offiziellen Ab-schluss. Intes hat in Auto-OPT in Zu-sammenarbeit mit Industriepartnern(DaimlerChrysler Nutzfahrzeuge,Karmann, Porsche), Softwarepart-nern (SFE) und Forschungspartnern(Fraunhofer-Institut SCAI) wesentli-che Entwicklungen durchgeführt und
begleitet, wie für die Optimierung inder Konzeptphase und der Fahr-zeugentwicklung, die Absicherungder virtuellen Prototypen durch Zu-verlässigkeitsanalyse, und dieschnelle Simulation sehr großerFahrzeugmodelle. Insbesondereführten die enorm reduzierten Re-chenzeiten (um mehr als einen Fak-tor 30) bei dynamischen Analysendurch die neue MLDR-Methode(Multi-Level Dynamic Reduction) zueiner großen Akzeptanz bei denIndustrieanwendern. Die Rechen-zeitgewinne konnten unmittelbar inVerkürzungen der Vernetzungszei-ten durch feinere Modelle umgesetztwerden, bei gleichzeitiger Verbesse-rung der Ergebnisqualität, was z. B.eine höhere Prognosesicherheit beiLebensdaueraussagen ermöglichte.Außerdem erlauben die Rechenzeit-gewinne eine deutliche Steigerungder erreichbaren Frequenzbereiche,womit FE-Methoden nun wesentlichbessere Aussagen in der Akustik vonFahrzeugen, Maschinen und Moto-ren erschließen. Der neue MLDR-Löser hat bereits außerhalb desKonsortiums große Resonanz ge-funden und wird allgemein alsDurchbruch bei dynamischen Be-rechnungen angesehen.
www.intes.de
LMS
LMS kündigt Revision 5 vonLMS Virtual.Lab anDie Version bietet neue und ergänz-te Anwendungen für die Bereichestrukturelle Analyse, Fahrverhaltenund Handling, Simulation der Innen-raumakustik, Straßengeräusche undLebensdaueranalysen. Mit Revision5 erhält LMS Virtual.Lab neue Funk-tionen zur Automatisierung von wie-derholenden Simulationsvorgängenund zur Erfassung komplexer Simu-lationsprozesse in einfach zu bear-beitenden Anwendungsvorlagen.Der neue Auto-Recursive Solver inLMS Virtual.Lab Motion spart bis zu60% Zeit bei der Lösung komplexerSimulationsmodelle mit mehrerenverknüpften Komponenten und einerhohen Anzahl von Kontaktpunktenzwischen den Komponenten. Da-durch wird der Engpass bei der Be-rechnung zur Simulation des dyna-

9NAFEMS Magazin 1/2005
NEUIGKEITEN
mischen Verhaltens von Steuer-ketten, Riemen, Kettenfahrzeugen,komplexen Produktionsmaschinenusw. eliminiert. Um realistische Si-mulationen mit hoher Zuverlässigkeitzu garantieren, führt Revision 5 au-ßerdem ein neues Korrelations-modul, LMS Virtual.Lab Correlation,ein, mit dessen Hilfe die Benutzervirtuelle Modelle anhand von Test-ergebnissen oder von bereits geprüf-ten Modellen mit vergleichbaremDesign überprüfen können.
www.lmsintl.com
Ricardo wählt LMS Test.Lab fürdie ganzheitliche NVH-Entwick-lung bei Antriebssträngen undGesamtfahrzeugenLMS International kündigte an, dassRicardo plc, Anbieter von Servicesin den Bereichen Automobiltechnolo-gie und -entwicklung, das ProgrammLMS Test.Lab als neue Standard-umgebung für die Entwicklung undfür Tests zum Geräusch- undSchwingungsverhalten einsetzenwird. Das Unternehmen plant dieEinrichtung von 20 LMS Test.LabSystemen in seinen Technikzentrenin Europa und den USA für die NVH-Entwicklung von Antriebssträngenund Gesamtfahrzeugen.
www.lmsintl.com
MSC.Software
Geschäftspartnerschaft mit derHelbling IT Solutions AGFührender Schweizer IT-Anbieterund IBM Partner unterzeichnet Ver-einbarung als neuer Geschäftspart-ner zum Vertrieb von MSC.SoftwareProdukten in der Schweiz. Helblinggenießt in der Schweiz einen hervor-ragenden Ruf und liefert seinen Kun-den umfassendes Know-how in denBereichen Engineering, Produktent-wicklung und PLM. Dank dieser Ver-einbarung kann die Helbling IT Solu-tions AG jetzt die gesamte Paletteder VPD-Lösungen von MSC.Soft-ware in der deutschsprachigenSchweiz anbieten.
www.mscsoftware.com
Nika
Nika GmbH und Siemens AG un-terzeichnen RahmenvertragDie Nika GmbH hat mit der SiemensAG einen weltweit gültigen Lizenz-vertrag über die Nutzung von Nika-Software geschlossen. Die Verein-barung bezieht sich auf die Enginee-ring Fluid Dynamics LösungenEFD.Lab und EFD.V5 sowie auf zu-künftige Produkte der Nika GmbHund gilt für Siemens-Niederlassun-gen und Tochtergesellschaften im In-und Ausland. Nika Produkte werdenbereits in mehreren Entwicklungsab-teilungen der Siemens AG oder beiverbundenen Unternehmen inDeutschland, Dänemark und Schwe-den für die strömungs- und wärme-technische Optimierung in der Elek-tronik (Kühlung), für Gas- und Flüs-sigkeitsmessgeräte, Sensoren,Haushaltsgeräte sowie in der Mess-und Regeltechnik eingesetzt.
www.nika.biz
science + computing
scFEMod 1.6: Abaqus-Unterstüt-zung und schnellere Benutzer-führungDas Tübinger IT-Dienstleistungs-und Softwarehaus science + compu-ting ag (s+c) hat scFEMod 1.6 ver-öffentlicht. Die neueste Version derSoftware für effizientes Preproces-sing unabhängig voneinander ver-netzter FE-Modelle unterstützt absofort zusätzlich das Abaqus-Daten-format. Auch die Benutzerführungdes Programms wurde an etlichenStellen nochmals optimiert. Bislangkonnte der Ingenieur bereits Pam-crash-, LS-Dyna-, Nastran-, BIF- undVIP-Daten mit scFEMod verarbeiten.Die neue Version bietet jetzt aucheine Schnittstelle für Abaqus-Daten.
www.science-computing.de
Silicon Graphics
SGI and MSC.Software:integrierte CAE-LösungBesserer Workflow und das Über-brücken wachsender Daten-Inselnsollen beim Engineering in punctoTime-to-Market Bremsen lösen. Fürdie Fertigungsindustrie haben SGIund MSC.Software jetzt eine inte-
grierte Lösung herausgebracht. Siesoll bei der Virtuellen Produktent-wicklung für ein besseres Stream-lining der Prozesse sorgen und dieIngenieure befähigen, Innovationenschneller zur Marktreife zu führen.Die neue integrierte VPD-(Virtual-Product-Development)-Lösung ver-bindet VPD-Anwendungen vonMSC.Software mit hochgradig ska-lierbaren, kosteneffizienten, auf In-tel-Prozessoren basierenden Tech-nologien von SGI für Datenspeicher-Infrastruktur, Visualisierung undHighPerformance-Computing (HPC).
www.mscsoftware.comwww.sgi.com/products
Unigraphics Solutions
UGS kündigt Femap Version 9 anUGS kündigt die Version 9 derWindows-basierenden Lösung Fe-map für Finite-Elemente-Analysen(FEA) an. Die Neuerungen umfas-sen eine flexible, schlanke Benutzer-führung, die auf der neuesten Micro-soft-Windows-Technologie beruht;eine deutliche Performance-Steige-rung im Finite Elemente Modeling;eine engere Integration mit führen-den Solvern für strukturelle und ther-mische Analysen und eine noch en-gere Integration zu NX Nastran.
www.ugsplm.de
UGS gibt NX Nastran Version 3freiUGS meldet die sofortige Verfügbar-keit der neuen Version 3 von NXNastran, seiner Software-Lösung fürHigh-end Finite Elemente Analysen(FEA). Sie arbeitet auf einem höhe-ren Integrationsniveau mit anderenLösungen zur digitalen Simulationzusammen. Die Skalierbarkeit derSoftware wurde auf 64 parallel ar-beitende CPUs erweitert. Nicht-lineare Berechnungen werden mitder Technologie des Solvers Adinaausgeführt, die nun in NX Nastranenthalten ist.
www.ugsplm.de

10 NAFEMS Magazin 1/2005
VERANSTALTUNGEN
2005
CAT.PRO - Int. Fachmesse für innovative Produktentwicklung, Daten- und Prozessmanagement12.-16.09.05 Stuttgart, D www.catpro.de Messe Stuttgart GmbH
NAFEMS Seminar: Quality & Reliability in CFD: Industrial Challenges13.-14.09.05 Nottingham, UK www.nafems.org NAFEMS International
Unigraphics PLM Europe Conference - Europäisches Anwendertreffen13.-15.09.05 Stuttgart, D www.plm-europe.org Unigraphics GmbH
Deutschsprachige Abaqus Benutzerkonferenz19.-21.09.05 Nürnberg, D www.abaqus.de Abaqus Deutschland GmbH
ECF 2005, 9. European PLM Forum04.-06.10.05 Frankfurt, D www.ecforum.com IBM, Dassault Systemes
Aachener Kolloquium Fahrzeug- und Motorentechnik04.-06.10.05 Aachen, D www.rwth-aachen.de RWTH Aachen
EuroPAM 200505.-07.10.05 Potsdam, D www.esi-group.com ESI Group
NAFEMS Trainingskurs: Basiswissen für die Anwendung von Finite-Element-Berechnungen fürIngenieure und KonstrukteureBasic 1: Praxisorientierte Strukturmechanik / Festigkeitslehre
17.-18.10.05 Wiesbaden, D www.nafems.de NAFEMS DACH
Altair Technology Seminar ATS 200518.10.05 Böblingen, D www.altair.de Altair Engineering GmbH
Fluent CFD Forum19.10.05 Bad Nauheim, D www.fluent-forum.de Fluent Deutschland GmbH
LS-Dyna Forum20.-21.10.05 Bamberg, D www.dynamore.de Dynamore GmbH
Virtual Product Development (VPD) Conference EMEA24.-26.10.05 München, D www.mscsoftware.com MSC.Software GmbH
NAFEMS Seminar: Numerische Simulation elektromechanischer Systeme26.-27.10.05 Wiesbaden, D www.nafems.de NAFEMS DACH
UGS-CAE-Konferenz03.-04.11.05 Frankfurt, D www.ugsplm.de Unipraphics GmbH
CD-adapco German Star Conference07.-08.11.2005 München, D www.cd-adapco.com CD-adapco
NAFEMS Seminar: Simulation vs Test09.11.05 Ratcliffe, UK www.nafems.org NAFEMS International
Cadfem Users´ Meeting 200509.-11.11.05 Bonn, D www.cadfem.de Cadfem GmbH

11NAFEMS Magazin 1/2005
VERANSTALTUNGEN
NAFEMS Trainingskurs: Basiswissen für die Anwendung von Finite-Element-Berechnungen fürIngenieure und KonstrukteureBasic 2: Praxisorientierte Grundlagen für FEM-Analysen
21.-22.11.05 Wiesbaden, D www.nafems.de NAFEMS DACH
NAFEMS Seminar: Component and System Analysis Using Numerical SimulationTechniques – FEA, CFD, MBS
23.-24.11.05 Göteburg, S www.nafems.org/nordic NAFEMS Nordic
Euromold 200530.11.-03.12.05 Frankfurt, D www.euromold.com Demat GmbH
2006
CeBit 200609.-15.03.06 Hannover, D www.cebit.de Deutsche Messe AG
Hannover Messe 200624.-28.04.06 Hannover, D www.hannovermesse.de Deutsche Messe AG
NAFEMS CFD-Seminar: Simulation gekoppelter Strömungsvorgänge (Multifield FSI)Anwendungen und Entwicklungstendenzen
08.-09.05.06 Wiesbaden, D www.nafems.de NAFEMS DACH
NAFEMS Seminar: Virtual Testing10.-11.05.06 Wiesbaden, D www.nafems.de NAFEMS DACH
VDI-Kongress: Berechnung und Simulation im Fahrzeugbau27.-28.09.06 Würzburg, D www.vdi-wissensforum.de VDI
NAFEMS Seminar: Materialmodellierung25.-26.10.06 Wiesbaden, D www.nafems.de NAFEMS DACH
Anzeige
12 NAFEMS Magazin 1/2005
MEHRKÖRPERSIMULATION
Elastische Komponenten in MKS-Tools am Beispiel von alaskaPeter Maißer, Uwe Jungnickel, Thomas Grund
Institut für Mechatronik e.V., Chemnitz, Deutschland
1 Einleitung Das Spektrum der Berücksichtigung elastischer Eigenschaften von Körpern in ursprünglich zur Simulation von Starrkörpersystemen konzipierten MKS-Tools reicht von der Modellierung elastischer Balken mittelsgeometrisch und physikalisch gekoppelter starrer Teilkörper (Superelementtechnik) über Partikelmodelle bis zuglobalen und lokalen Ritz-Ansätzen für das Verschiebungsfeld der elastischen Körper. Letzterer aus derDiskretisierung der Kontinuumsmechanik resultierender Zugang hat sich inzwischen allgemein durchgesetztund dadurch den Impuls zur Kopplung von FEM- und MKS-Tools ausgelöst.
Der in alaska implementierte MKS-Algorithmus für Starrkörpersysteme weist gegenüber vergleichbaren MKS-Tools wie Adams, Dads, Dymola, Simpack die folgenden Besonderheiten auf: Ausgehend von einergewählten Baumstruktur wird die Relativkinematik des Mehrkörpersystems (MKS) aufgebaut. Die verallgemeinerten Koordinaten des MKS sind Relativkoordinaten seiner Baumgelenke. AlleAbsolutgeschwindigkeiten der Körper werden im körperfesten Koordinatensystem formuliert. DieBewegungsgleichungen des Systems sind die Lagrangeschen Gleichungen unter Berücksichtigung vonZwangsbedingungen. Optional können entweder die Lagrangeschen Gleichungen oder ein äquivalenter Order-N-Algorithmus gelöst werden, wobei für beide Varianten auch symbolischer Code erzeugbar ist.
Bei der Erweiterung des Algorithmus auf MKS, die auch elastisch deformierbare Körper enthalten (hybride MKS= HMKS), sind diese charakteristischen Merkmale beibehalten worden. In dieser Arbeit werden diewesentlichen Schritte skizziert, die zur Einbindung flexibler Körper in den MKS-Algorithmus führen. Innerhalb des MKS-Tools erfahren lokale Koordinatensysteme flexibler Körper kleine Deformationen bezüglich einesReferenzkoordinatensystems, das große Starrkörper-bewegungen ausführt. Die Formfunktionen für die Ritz-Ansätze können bei einfachen elastischen Strukturen entweder aus analytischen Beziehungen hergeleitet oderexperimentell ermittelt werden. Bei komplizierten elastischen Bauteilen sollte ein FEM-Programm die Berechnung der Ansatzfunktionen unterstützen. Da die elastischen Körper im MKS geometrischen Kopplungenunterliegen, sind entsprechende Randbedingungen zu berücksichtigen. Komponentenmoden, die z.B. aus demCraig-Bampton-Algorithmus durch Superposition von Eigenmoden bei fixierten Randknoten mit Zwangsmodenresultieren, sind daher zu bevorzugen. Daran anschließend wird üblicherweise ein Eigenwertproblem für daskondensierte FEM-System gelöst und eine Transformation des FEM-Systems auf den von den interessierenden Eigenvektoren aufgespannten Unterraum vorgenommen. Diese Koordinatentransformationen vermitteln auchden Zusammenhang zwischen den physikalischen Koordinaten im FEM-Tool und den elastischen Koordinaten im MKS-Tool bzw. zwischen den jeweiligen Formfunktionen. Insbesondere kann das FEM-Tool die Berechnung der im MKS-Algorithmus benötigten Invarianten des elastischen Körpers (von den Formfunktionen abhängigeVolumenintegrale) unterstützen.
Die Lagrangeschen Bewegungsgleichungen für HMKS sind gekoppelte Differentialgleichungen für dieStarrkörper- und die elastischen Bewegungen der beteiligten Körper. Sie werden in alaska ausgehend von derkinetischen und potentiellen Energie des HMKS ableitungsfrei generiert. Die Starrkörperkoordinaten sind vonder Wahl der Referenzkoordinatensysteme der elastischen Körper unabhängig. Die Wechselwirkungen zwischen Starrkörperbewegungen und elastischen Bewegungen können somit korrekt erfasst werden. Von ihrerStruktur her betrachtet unterscheiden sich die Bewegungsgleichungen von MKS und HMKS nicht grundsätzlich.Insofern trägt der gewählte Zugang zu einer ganzheitlichen Betrachtungsweise der Mehrkörperdynamik bei.
Unterschiede bestehen jedoch in den numerischen Eigenschaften der generierten differential-algebraischen Gleichungen. Die Bewegungsgleichungen von HMKS sind gewöhnlich sehr steif, und es besteht nach wie vorBedarf nach effektiven Verfahren zur Integration steifer differential-algebraischer Systeme.

13NAFEMS Magazin 1/2005
MEHRKÖRPERSIMULATION
2 Flexible Körper im MKS-Tool alaska
2.1 Hybride Mehrkörpersysteme
Unter einem hybriden Mehrkörpersystem soll ein System starrer und elastischer Körper verstanden werden, welche untereinander und mit dem Inertialsystem (IKS) geometrisch und/oder physikalisch gekoppelt sind.Elastische Körper werden im MKS-Tool alaska wie folgt diskretisiert: Eine zweckmäßig gewählte Konfiguration eines elastischen Körpers kB des HMKS werde als Referenzkonfiguration kB fixiert. Auf dieser
Referenzkonfiguration seien cartesische Koordinaten in Bezug auf ein kB -festes Referenzkoordinatensystem
},{ ikk eO (RKS) eingeführt. In jedem Punkt von kB sei ein zu diesem Referenzkoordinatensystem paralleles
orthonormiertes Dreibein )}(,{ ik befestigt. Das Verschiebungsfeld der elastischen Deformation des Körpers
in seiner aktuellen Konfiguration tkB werde im RKS durch den linearen Ritz-Ansatz
)()(),( txtu kkk (1)
beschrieben. Die krk Rtx )( heißen elastische Koordinaten. Ferner werde der Drehtensor der polaren
Zerlegung des Deformationsgradienten kF bezüglich der Dreibeine )}(,{ ik durch Drehmatrizen )( kE
beschrieben, die durch kleine Bryantwinkel )()(),( txt kkk (2)
parametrisiert werden. Die Beschreibung der Geschwindigkeiten der RKS in alaska erfolgt prinzipiell im RKS selbst. Ein weiteres Merkmal besteht in der Relativkinematik. Andere Zugänge ([7], [8]) wählen demgegenüber Beschreibungen imInertialkoordinatensystem und/oder Absolutkoordinaten. Durch zweckmäßiges Aufschneiden kinematischer Schleifen entsteht im MKS eine Baumstruktur, welche dieKinematik bestimmt. Es bezeichne )(kL die Nummer des Vorgängerkörpers im Baum.
Die Konfiguration eines Koordinatensystems }{ ib in Bezug auf ein Koordinatensystem }{ ia werde durch die homogene Darstellung als 4x4 Matrix
)3(10
SEzE
g abTab
ab
beschrieben (siehe [6]). abE bezeichne die relative Drehmatrix und abz den Verschiebungsvektor der
Koordinatenursprünge in }{ ia . Relativgeschwindigkeit ababab zEv : und Relativwinkelge-schwindigkeit
Tabababab EE:ˆ, , beide zerlegt in }{ ib , seien zum Geschwindigkeitsvektor 6R
vV
ab
abab
zusammengefasst. Die Absolutkonfiguration des RKS und seine Absolutgeschwindigkeiten bezüglich des IKS },{ 00
ieO werden mit
kk gg 0: bzw. kk VV 0: bezeichnet. Seien nun }{ ia und }{ ib Gelenkkoordinatensysteme auf )(kLB bzw.
kB des Baumgelenks, das die beiden Körper verbindet. Dann gelten die Rekursionsformeln
),()()( )()()( kbkkabkLakLkkL xgqgxgg ,)()( kkLkLk ggg (3)
,)(),(),,(),,( 32)()(
1)()()( kkkkkkkkLkkkLkkLkkkLkkLk xxHqxqHxxqxHVxqxXV (4)
.32)(
1)()( kkkkkkLkkLkkLk dxHqHxHVXV (5)
Die Lage eines Punktes P des Körpers kB im IKS in der aktuellen Konfiguration tkB ist damit
))(( kkTkkP xEzr (6)
und seine Geschwindigkeit im RKS ist
kkkkkkP xxvv )())(( . (7)

14 NAFEMS Magazin 1/2005
Die knk Rtq )( in (3),(4) bezeichnen Relativkoordinaten des Gelenks (Starrkörperkoordinaten). Die
Gesamtheit aller Relativkoordinaten der Baumgelenke und elastischen Koordinaten der Körper bilden die verallgemeinerten Koordinaten des HMKS. Somit besitzt die Baumstruktur den Freiheitsgrad
kkk nrn )( .
Kinematische und dynamische Zwangsbedingungen (z.B. Schließbedingungen) werden als linear in denGeschwindigkeiten bzw. Beschleunigungen vorausgesetzt. Es existieren folglich Koeffizienten
krmk
mk RxqJRxqW ),(,),( 6 , so dass die dynamischen Zwangsbedingnungen in der allgemeinen
Form
),,,,()(1
txqxVwxJVW kkkk
N
k (8)
formuliert werden können.
Die partiellen Ableitungen der Geschwindigkeitsvektoren nach den verallgemeinerten Geschwindigkeitenheißen kinematische Grundfunktionen:
.:,:a
kak
a
ka
k xV
YqV
U
Die kinematischen Grundfunktionen gestatten nach (4) eine rekursive Berechnung.
Mit der Bezeichnung )()6(
0: aak rnr
ak
akaka
kR
I
YUS folgt aus (4) und (5)
kkLkkLkPaa
k
a
aak
k
k
Paa a
aak
k
k dyXyy
x
qS
x
Vx
qS
x
V
kk
)()(::
:,0
, . (9)
In den eingeführten verallgemeinerten Koordinaten lauten die Lagrangeschen Bewegungsgleichungen derBaumstruktur
,)(
,)(
axx
asqq
QTT
QTT
aa
sa
sa ,,...,1 Na (10)
mit der kinetischen Energie N
k B
PTP
k
dmvvT1
21 des HMKS und verallgemeinerten Kräften, die aus der
virtuellen Arbeit der eingeprägten Volumenkräfte sowie dem elastischen Potential der Körper resultieren (siehe[5]). Für die Berechnung des elastischen Potentials werden die aus dem Hookeschen Stoffgesetz resultierenden Konstitutivgleichungen vorausgesetzt.
Die kinetische Energie hat mit (7) und (10) die Form
b
bbk
kk
kkTa
N
k Paa Pbbk
Ta
Ta
k
kN
k kk
kkTk
Tk x
qS
MM
MMSxq
x
V
MM
MMxVT
k k
2221
1211
1 : :21
12221
1211
21 )()( . (11)
Die ijkM sind Funktionale der Ritz-Ansatzfunktionen k und hängen als solche nur von den elastischen
Koordinaten und vorab gegebenenfalls mit Unterstützung eines FEM-Programms zu berechnenden Invarianten
dmIdmIdmI
dmIdmIdmI
dmIdmIdmI
B
v
B
T
B
B
vT
B B
B B B
T
***
** *
* * *
ˆˆ
ˆˆˆ
ˆˆˆ
963
852
741
(12)
ab.
MEHRKÖRPERSIMULATION

15NAFEMS Magazin 1/2005
Die virtuelle Arbeit von in den Körper kB eingeprägten Volumenkräften dK
dKxISxqdKErT
kkkTa
kPaa B
Ta
Tak
B
TP
k kk
)̂()(:
und das elastische Potential generieren verallgemeinerte Kräfte, die für kPa im Bildraum von Tak
S liegen.
Gleiches gilt nach (11) für beschleunigungsunabhängige Trägheitsterme (Coriolis- und Zentrifugalterme). Kinematische Zwangsbedingungen bewirken in den Lagrangeschen Gleichungen zusätzliche verallgemeinerteReaktionskräfte. Die Lagrangeschen Gleichungen lauten zusammen mit den dynamischen Zwangsbedingungen somit nach (9), (10), (11), (8) explizit
.})({
,...,1,
11 :
:1
N
kkk
N
k Pbbkkbbkbb
kk
Tkk
TkkT
aPak
k
N
b b
bab
yWwxJxYqUW
NaJh
WfS
x
qG
k
k (13)
Der Konfigurationenraum der Baumstruktur wird zu einem Riemannschen Raum nV mit der Metrik NNbaabGG 11)( , gebildet aus den Blöcken )()( bbaa nrnr
ab RG ,
Tbaabbk
Pbak kk
kkTakab GGbaS
MM
MMSG
k
)(,,:,:
2221
1211
. (14)
2.2 Verbindung von MKS-Tool und FEM-Programm
Nur in Ausnahmefällen einfacher elastischer Strukturen wird es möglich sein, globale Ritz-Ansätze der Form (1), (2) ad hoc analytisch zu formulieren. Normalerweise wird auf eine FEM-Diskretisierung des elastischen Kontinuums zurückzugreifen sein. Im Idealfall sollte die Auswahl der Ansatzfunktionen und die Berechnung derIntegrale (12) durch das FEM-Programm unterstützt werden. Die elastischen Körper unterliegen im HMKSbestimmten geometrischen Randbedingungen, die in die Berechnung der FEM-Struktur einfließen müssen. Bei der Auswahl der Ansatzfunktionen wird ein geeigneter Kompromiß zwischen einer guten Abbildung derelastischen Eigenschaften der Struktur und einer möglichst niedrigen Dimension kr der verwendeten elastischen Koordinaten angestrebt. Deshalb wird der Einsatz des Craig-Bampton-Algorithmus innerhalb des FEM-Programms zur Berücksichtigung von Randbedingungen und zur Kondensation auf ein Systemniedrigeren Freiheitsgrades empfohlen. Das kondensierte FEM-Differentialgleichungssystem
FZxZKZxZMZ TTT (15)
wird unmittelbar Bestandteil der Lagrangeschen Gleichungen (13). Die Massenmatrix stimmt mit 6I überein, während die Steifigkeitsmatrix und der Lastvektor in die Berechnung des Terms kh einfließen.
MEHRKÖRPERSIMULATION
16 NAFEMS Magazin 1/2005
3 Beispiele
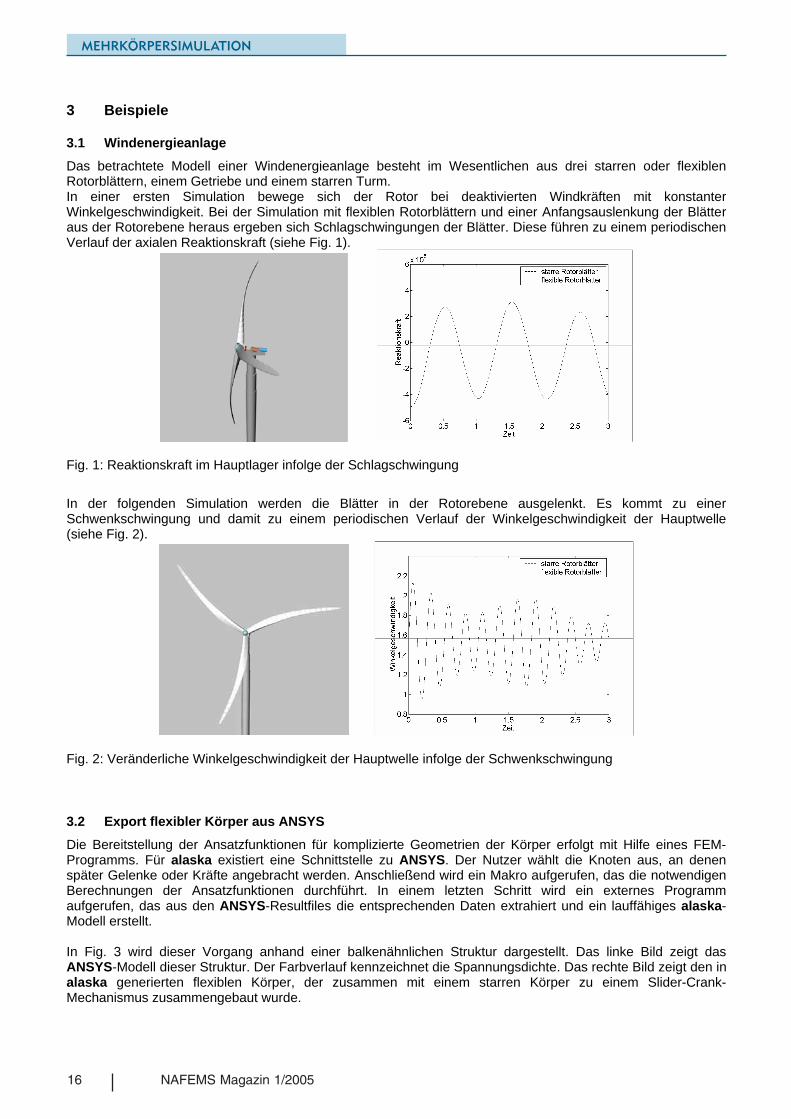
3.1 Windenergieanlage
Das betrachtete Modell einer Windenergieanlage besteht im Wesentlichen aus drei starren oder flexiblenRotorblättern, einem Getriebe und einem starren Turm. In einer ersten Simulation bewege sich der Rotor bei deaktivierten Windkräften mit konstanterWinkelgeschwindigkeit. Bei der Simulation mit flexiblen Rotorblättern und einer Anfangsauslenkung der Blätteraus der Rotorebene heraus ergeben sich Schlagschwingungen der Blätter. Diese führen zu einem periodischenVerlauf der axialen Reaktionskraft (siehe Fig. 1).
Fig. 1: Reaktionskraft im Hauptlager infolge der Schlagschwingung
In der folgenden Simulation werden die Blätter in der Rotorebene ausgelenkt. Es kommt zu einerSchwenkschwingung und damit zu einem periodischen Verlauf der Winkelgeschwindigkeit der Hauptwelle(siehe Fig. 2).
Fig. 2: Veränderliche Winkelgeschwindigkeit der Hauptwelle infolge der Schwenkschwingung
3.2 Export flexibler Körper aus ANSYS
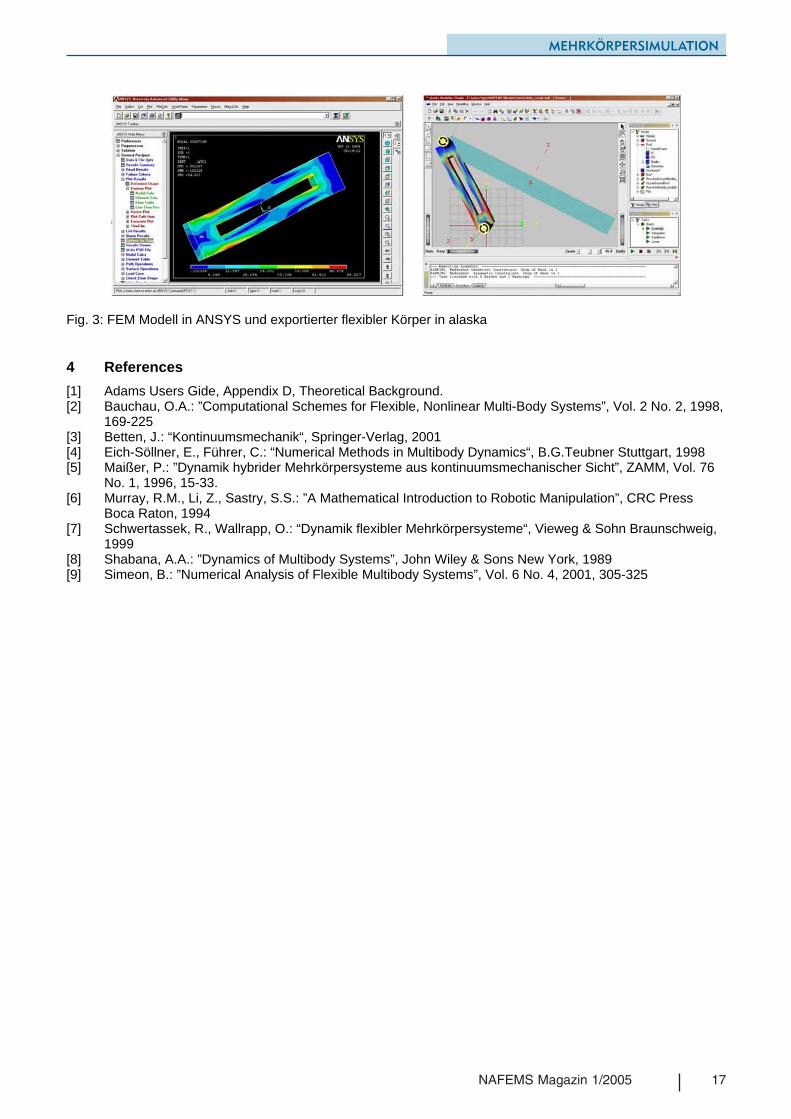
Die Bereitstellung der Ansatzfunktionen für komplizierte Geometrien der Körper erfolgt mit Hilfe eines FEM-Programms. Für alaska existiert eine Schnittstelle zu ANSYS. Der Nutzer wählt die Knoten aus, an denen später Gelenke oder Kräfte angebracht werden. Anschließend wird ein Makro aufgerufen, das die notwendigenBerechnungen der Ansatzfunktionen durchführt. In einem letzten Schritt wird ein externes Programmaufgerufen, das aus den ANSYS-Resultfiles die entsprechenden Daten extrahiert und ein lauffähiges alaska-Modell erstellt.
In Fig. 3 wird dieser Vorgang anhand einer balkenähnlichen Struktur dargestellt. Das linke Bild zeigt dasANSYS-Modell dieser Struktur. Der Farbverlauf kennzeichnet die Spannungsdichte. Das rechte Bild zeigt den in alaska generierten flexiblen Körper, der zusammen mit einem starren Körper zu einem Slider-Crank-Mechanismus zusammengebaut wurde.
MEHRKÖRPERSIMULATION
17NAFEMS Magazin 1/2005
Fig. 3: FEM Modell in ANSYS und exportierter flexibler Körper in alaska
4 References [1] Adams Users Gide, Appendix D, Theoretical Background. [2] Bauchau, O.A.: ”Computational Schemes for Flexible, Nonlinear Multi-Body Systems”, Vol. 2 No. 2, 1998,
169-225[3] Betten, J.: “Kontinuumsmechanik“, Springer-Verlag, 2001 [4] Eich-Söllner, E., Führer, C.: “Numerical Methods in Multibody Dynamics“, B.G.Teubner Stuttgart, 1998 [5] Maißer, P.: ”Dynamik hybrider Mehrkörpersysteme aus kontinuumsmechanischer Sicht”, ZAMM, Vol. 76
No. 1, 1996, 15-33. [6] Murray, R.M., Li, Z., Sastry, S.S.: ”A Mathematical Introduction to Robotic Manipulation”, CRC Press
Boca Raton, 1994 [7] Schwertassek, R., Wallrapp, O.: “Dynamik flexibler Mehrkörpersysteme“, Vieweg & Sohn Braunschweig,
1999[8] Shabana, A.A.: ”Dynamics of Multibody Systems”, John Wiley & Sons New York, 1989 [9] Simeon, B.: ”Numerical Analysis of Flexible Multibody Systems”, Vol. 6 No. 4, 2001, 305-325
MEHRKÖRPERSIMULATION

18 NAFEMS Magazin 1/2005
MEHRKÖRPERSIMULATION
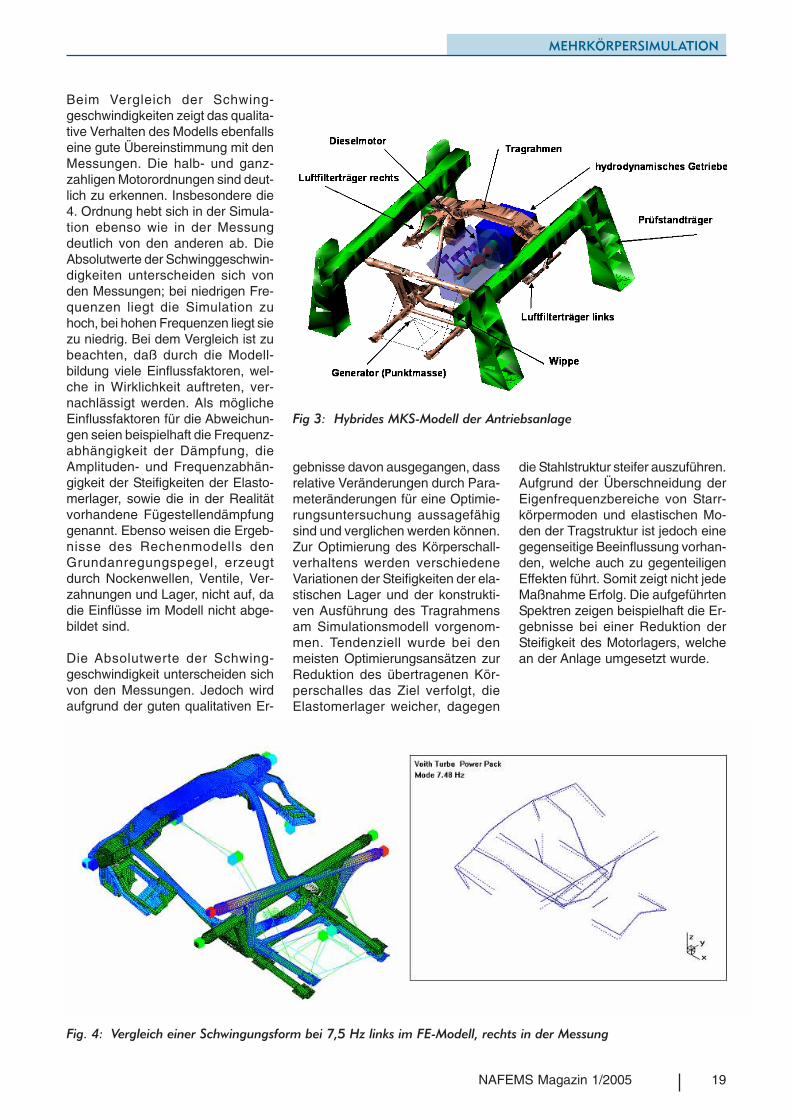
Voith Turbo baut Antriebsanlagen fürdieselhydraulisch angetriebeneZüge in verschiedenen Leistungs-klassen. Bei der hier vorgestelltenAnlage handelt es sich um ein Voith-Powerpack der Baureihe Railpackmit einem Dieselmotor in Verbindungmit dem hydrodynamischen Getrie-be T212 bre der 400 kW Leistungs-klasse. Die maßgeblichen Körper-schallquellen stellen der Dieselmo-tor und in untergeordnetem Maßedas Turbogetriebe dar. Der Über-tragungspfad läuft ausgehend vonden Komponenten über die elasti-schen Lager und die Tragstruktur inden Fahrzeugwagenkasten, an wel-chem das Paket aufgehängt wird.
Ihre zeitliche Abfolge orientiert sichebenfalls an der Zündfolge. DerZylinderdruckverlauf wird als Stütz-stellenverlauf eingelesen.
Die gesamte Anlage wird wie bei ei-nem MKS-Modell üblich aus Starr-körpern (Motor-Getriebe-Einheit)und Federelementen (Elastomer-lager) aufgebaut. Hinzu kommenelastische Körper (Tragrahmen,Prüfstandsträger), welche ausIDEAS exportiert und über dieSchnittstelle ADAMS-Flex nachADAMS importiert werden. Bei derBerechnung der Moden in IDEASmuß darauf geachtet werden, dassan den elastischen Körpern schondie später im MKS-Modell benötig-ten Einspannungsbedingungen ge-setzt werden, da diese ausschlag-gebend für die resultierendenSchwingformen und Frequenzensind.
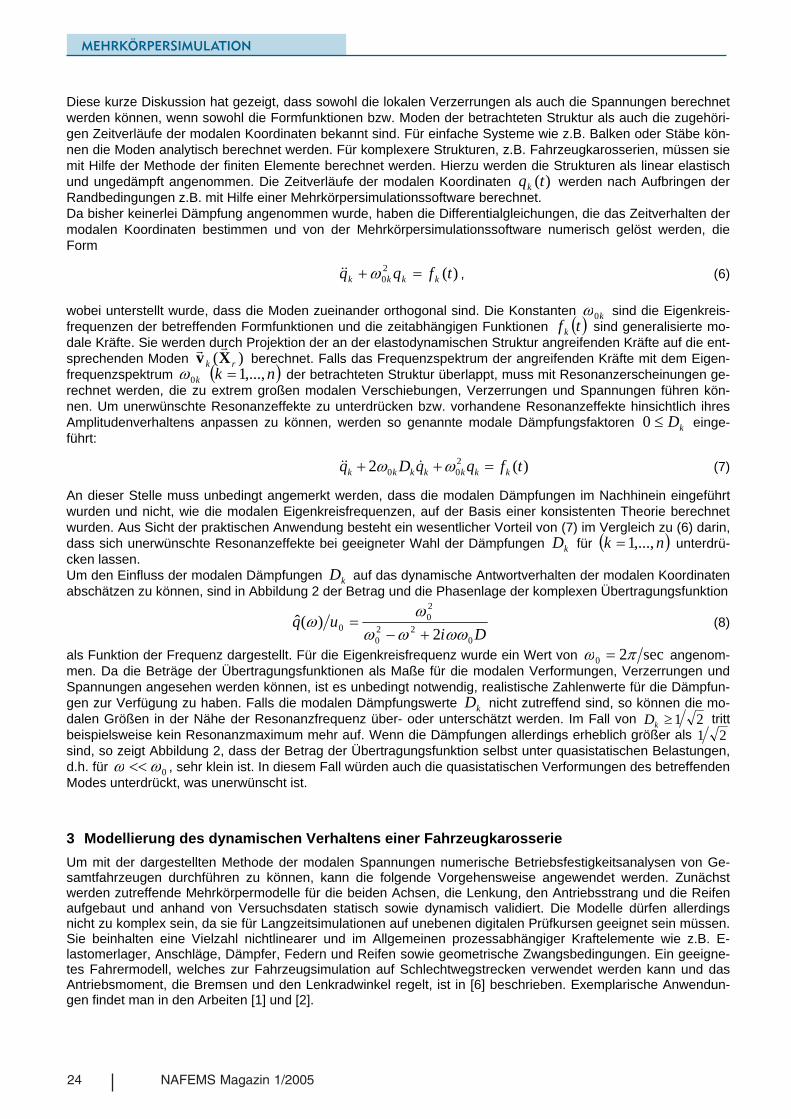
Zunächst wird das Rechenmodellhinsichtlich seiner modalen Eigen-schaften mit den Messungen abge-glichen und so weit möglichangepasst. Beispielhaft sei eineSchwingungsform bei 7,5 Hz aufge-führt, welche eine gute Übereinstim-mung zwischen Simulation und Mes-sung zeigt.
Körperschalluntersuchung einerdieselhydraulischen Antriebsanlagemit FEM und MKS
Thomas WalterVoith Turbo GmbH & Co. KG, Heidenheim
Es wird die Analyse und Optimierung des Körper-schallverhaltens einer dieselhydraulischen An-triebsanlage für einen Triebwagen, hergestellt vonder Firma VOITH Turbo GmbH & Co. KG, beste-hend aus einem Dieselmotor, dem VOITH Turbo-getriebe T212 bre, sowie der kompletten Periphe-rie beschrieben, welche als Paket in ein zweistu-figes Lagerungssystem integriert ist. Aufbauendauf einer messtechnischen Untersuchung wirdanhand einer rechnerischen Analyse mit Hilfe ei-nes hybriden Mehrkörpersimulationsmodells dasKörperschallverhalten verschiedener Variantenoptimiert.
Fig. 1: Die Antriebsanlage
Zur Bestimmung des Betriebs-schwingungsverhaltens wird die ge-samte Antriebsanlage auf einemPrüfstand messtechnisch untersuchtund das Körperschallverhalten be-stimmt. Ebenso werden Modalmes-sungen durchgeführt, um für denspäteren Aufbau des Simulations-modells eine Abgleichsmöglichkeitzu schaffen. Das Mehrkörpersimula-tionsmodell wird mit dem ProgrammADAMS von MSC aufgebaut, wäh-rend die elastischen Körper mit demFEM-Programm IDEAS von UGS er-stellt werden. Der Aufbau teilt sichauf in die Modellierung des Diesel-motors als dominierende Körper-schallquelle mit Gas- und Massen-kräften und in die Modellierung dergesamten Antriebsanlage aus Mas-sen, Feder-Dämpfer-Elementen undelastischen Körpern als schwin-gungsfähigem Gesamtsystem. DieMassenkräfte werden durch dieräumliche Anordnung der Kinematikder Kurbeltriebe, bestehend ausKurbelwelle, Kolben und Pleuel undder entsprechenden Zündfolge mo-delliert. Die Gaskraftverläufe F
k(t)
werden aus gemessenen Zylinder-druckverläufen p
k(t) multipliziert mit
der Kolbenfläche errechnet:
Fig. 2: Modell des Motors
19NAFEMS Magazin 1/2005
MEHRKÖRPERSIMULATION
Beim Vergleich der Schwing-geschwindigkeiten zeigt das qualita-tive Verhalten des Modells ebenfallseine gute Übereinstimmung mit denMessungen. Die halb- und ganz-zahligen Motorordnungen sind deut-lich zu erkennen. Insbesondere die4. Ordnung hebt sich in der Simula-tion ebenso wie in der Messungdeutlich von den anderen ab. DieAbsolutwerte der Schwinggeschwin-digkeiten unterscheiden sich vonden Messungen; bei niedrigen Fre-quenzen liegt die Simulation zuhoch, bei hohen Frequenzen liegt siezu niedrig. Bei dem Vergleich ist zubeachten, daß durch die Modell-bildung viele Einflussfaktoren, wel-che in Wirklichkeit auftreten, ver-nachlässigt werden. Als möglicheEinflussfaktoren für die Abweichun-gen seien beispielhaft die Frequenz-abhängigkeit der Dämpfung, dieAmplituden- und Frequenzabhän-gigkeit der Steifigkeiten der Elasto-merlager, sowie die in der Realitätvorhandene Fügestellendämpfunggenannt. Ebenso weisen die Ergeb-nisse des Rechenmodells denGrundanregungspegel, erzeugtdurch Nockenwellen, Ventile, Ver-zahnungen und Lager, nicht auf, dadie Einflüsse im Modell nicht abge-bildet sind.
Die Absolutwerte der Schwing-geschwindigkeit unterscheiden sichvon den Messungen. Jedoch wirdaufgrund der guten qualitativen Er-
gebnisse davon ausgegangen, dassrelative Veränderungen durch Para-meteränderungen für eine Optimie-rungsuntersuchung aussagefähigsind und verglichen werden können.Zur Optimierung des Körperschall-verhaltens werden verschiedeneVariationen der Steifigkeiten der ela-stischen Lager und der konstrukti-ven Ausführung des Tragrahmensam Simulationsmodell vorgenom-men. Tendenziell wurde bei denmeisten Optimierungsansätzen zurReduktion des übertragenen Kör-perschalles das Ziel verfolgt, dieElastomerlager weicher, dagegen
Fig 3: Hybrides MKS-Modell der Antriebsanlage
Fig. 4: Vergleich einer Schwingungsform bei 7,5 Hz links im FE-Modell, rechts in der Messung
die Stahlstruktur steifer auszuführen.Aufgrund der Überschneidung derEigenfrequenzbereiche von Starr-körpermoden und elastischen Mo-den der Tragstruktur ist jedoch einegegenseitige Beeinflussung vorhan-den, welche auch zu gegenteiligenEffekten führt. Somit zeigt nicht jedeMaßnahme Erfolg. Die aufgeführtenSpektren zeigen beispielhaft die Er-gebnisse bei einer Reduktion derSteifigkeit des Motorlagers, welchean der Anlage umgesetzt wurde.

20 NAFEMS Magazin 1/2005
MEHRKÖRPERSIMULATION
Fig. 5: Gegenüberstellung der Ergebnisse aus Messung und Rechnung, Schwinggeschwindigkeiten
Fig. 6: Vergleich der Ergebnisse mit ursprünglicher Steifigkeit und auf 70% reduzierter Steifigkeit des Motorlagers
(x-Richtung)

21NAFEMS Magazin 1/2005
MEHRKÖRPERSIMULATION
Einsatz flexibler Körper in der numerischenLebensdauersimulation von Kraftfahrzeugen:Methoden, Beispiele und offene Fragen Dr.-Ing. Alexander Lion
Volkswagen AG, D-38436 Wolfsburg, Deutschland
Zusammenfassung:
In der Entwicklung von Personenkraftfahrzeugen werden in immer stärkerem Maße Berechnungen mit der Me-thode der Mehrkörpersimulation durchgeführt. In der Vergangenheit wurden die Fahrzeuge als Systeme vonstarren Körpern abgebildet, die durch ideale Gelenke und Kraftelemente miteinander in Verbindung stehen.Heutzutage werden in immer stärkerem Maße auch elastische Körper eingesetzt, was auf hybride Mehrkörper-systeme führt. Dieser Zugang ist prinzipiell notwendig, wenn die globalen Verformungen eines elastischen Teil-systems einen signifikanten Einfluss auf das mechanische Verhalten des Gesamtsystems haben oder wennman sich für das elastodynamischer Antwortverhalten eines speziellen Teilsystems interessiert. Das im Zent-rum des Artikels stehende Anwendungsgebiet ist die Simulation von Betriebsfestigkeitseigenschaften. Hierzuwerden Computersimulationen mit hybriden Mehrkörperfahrzeugmodellen auf unebenen digitalisierten Prüfstre-cken durchgeführt. Die Karosserie wird dabei als lineare elastodynamische Struktur in modaler Darstellung ab-gebildet, wozu die Eigenmoden und zugehörigen Eigenfrequenzen und Dämpfungen im relevanten Frequenz-bereich ermittelt werden müssen. Im Fall geometrisch einfacher Strukturen wie z.B. Balken oder Platten ist esmöglich, die Dämpfungen experimentell zu identifizieren. Im Fall von Strukturen mit hohen modalen Dichtenmüssen diese dagegen mit Hilfe von lokal bedämpften Finite Elemente Modellen berechnet werden. Um die lo-kalen Spannungs- und Schädigungsverteilungen in der Struktur zu berechnen, wird die Methode der modalenSpannungen angewendet. Die damit durchgeführten Lebensdauersimulationen liefern plausible Ergebnisse,wenn die modalen Dämpfungen zutreffend abgeschätzt wurden. Trotzdem erfordert der Umgang mit Daten-mengen in der Größenordnung von 10 Gigabyte noch Verbesserungen in der Berechnungsprozesskette. In Ab-hängigkeit von der Komplexität der hybriden Gesamtfahrzeugmodelle liegen typische Rechenzeiten im Bereichvon einigen Tagen bis zu einigen Wochen.

22 NAFEMS Magazin 1/2005
1 Einleitung Im frühen Entwicklungsstadium von Personenkraftfahrzeugen werden seit vielen Jahren verschiedene Simulati-onstechniken eingesetzt. Neben den klassischen Simulationsdisziplinen wie beispielsweise Crash- und Steifig-keitsberechnungen rückt die numerische Betriebsfestigkeitssimulation immer mehr ins Blickfeld der Ingenieure. Hierzu werden Mehrkörpergesamtfahrzeugmodelle mit dem gewünschten Detailierungsgrad aufgebaut und im Computer über digitalisierte Prüfstrecken fahren gelassen. Um die gewünschte Genauigkeit der Simulationser-gebnisse zu erreichen, ist es notwendig, dass die Modelle sowohl die statischen als auch die dynamischen Ei-genschaften der betreffenden Fahrzeuge abbilden. In den vergangenen Jahren ist die Leistungsfähigkeit vonComputern, Reifenmodellen für das Befahren unebener Strassen und Softwaresystemen für die Mehrkörpersi-mulation stark gestiegen, so dass es heutzutage möglich ist, das dynamische Verhalten von Gesamtfahrzeugenauf digitalisierten unebenen Schlechtwegstrecken zu simulieren (siehe z.B. [1, 2, 3]). Dieser Artikel präsentiert aussagefähige dynamische Analysen hybrider Gesamtfahrzeugmodelle mit Blick aufdie Betriebsfestigkeit. Mit Hilfe eines kommerziellen Mehrkörpersimulationsprogramms und eines hybriden Ge-samtfahrzeugmodells können die Schnittkräfte zwischen Fahrwerk und Karosserie sowie die modalen Koordina-ten derjenigen Teilsysteme, die als flexibel abgebildet werden, simuliert werden. Die digitalisierte Teststrecke hateine Gesamtlänge von etwa 18 Kilometern und beinhaltet eine Vielzahl unebener Straßenabschnitte wie z.B.Schlaglöcher, Belgisch Pflaster und Schlagleisten sowie Handlingabschnitte mit Kurvenradien von etwa 10 Me-tern. Der auf dem virtuellen Testgelände zu fahrende Prüfkurs und das zugehörige Geschwindigkeitsprofil die-nen als Eingangsdaten für das bei Volkswagen entwickelte Fahrermodell. Durch Variation dieser Eingangsdaten ist es möglich, die Fahrerstreuung abzubilden, welche auf natürliche Weise bei Handlingmanövern, Brems- und Beschleunigungsvorgängen auftritt. Der Fahrzeugaufbau wird als modale elastische Struktur beschrieben. Die lokalen Spannungen und Deformationen können mit den modalen Koordinaten und Formfunktionen berechnetwerden und für eine anschließende Betriebsfestigkeitssimulation, die im Postprozessing stattfindet, verwendetwerden.
2 Darstellung flexibler Körper in der Mehrkörperdynamik Jeder materielle Körper verformt sich unter dem Einfluss von mechanischen Lasten mehr oder weniger stark. Wenn die angreifenden Kräfte relativ klein sind, bleiben die resultierenden Dehnungen ebenfalls klein, sind re-versibel und hängen linear von den Kräften ab. Das mechanische Verhalten der Struktur ist damit linear elas-tisch. Im Fall von größeren Spannungen können plastische oder irreversible Dehnungen auftreten. Wenn diese so genannten lastinduzierten Verformungen von der Belastungsgeschwindigkeit abhängen ist das Material viskoplastisch oder viskoelastisch. Wenn die Materialeigenschaften in unterschiedlichen Raumrichtungen ver-schieden sind, ist das Material anisotrop und im Fall von richtungsunabhängigen Eigenschaften isotrop. Gegen-wärtig werden im Rahmen der hybriden Mehrkörpersysteme allerdings nur isotrope linear elastische Stoffeigen-schaften berücksichtigt.
Abb. 1: Zur Kinematik flexibler Körper.
Im klassischen Ansatz der Mehrkörperdynamik wird die Deformierbarkeit aller beteiligten materiellen Körper ig-noriert, d.h. die Körper werden als starr angenommen (siehe z.B. [4]). Aus physikalischer Sicht ist dieses Vorge-hen angemessen, wenn die Verformungen der beteiligten Körper unter den gegebenen Beanspruchungen ver-
eu
u
xrX
ru
X
MEHRKÖRPERSIMULATION

23NAFEMS Magazin 1/2005
nachlässigbar sind. Wenn dies nicht zutrifft, so ist besteht der einfachste Ansatz zur Berücksichtigung der De-formierbarkeit darin, die Struktur als linear elastisch abzubilden. Für Details wird der Leser auf die Arbeiten [5]und [8] verwiesen. Um die Deformierbarkeit materieller Körper im Rahmen der Mehrkörperdynamik zu berücksichtigen, wird Abbil-dung 1 betrachtet. Der aktuelle Ortsvektor ),( tXx eines materiellen Punktes X hängt mit dem Verschiebungs-vektor über die Beziehungen
),(),(),( ttt rer XuXuXu (1)
und
),(),( tt rer XuXuXx , (2)
zusammen, wobei ),( tr Xu die so genannte Starrkörperverschiebung ist und ),( tre Xu der elastischen Ver-schiebung entspricht. Dabei ist es üblich, den elastischen Verschiebungsvektor als Funktion der materiellenPunktkoordinaten ),( trr XuXX des begleitenden Starrkörpers auszudrücken. Im folgenden wird ange-nommen, dass die elastischen Verformungen hinreichend klein sind, d.h. dass Ltre ),(Xu gilt. Dabei istL eine typische Abmessung der betrachteten Struktur. Als Konsequenz daraus kann der orts- und zeitabhängi-ge Verschiebungsvektor durch einen modalen Ritz Ansatz approximiert werden (siehe z.B. [8]):
)()(),(1
tqt k
n
krkre XvXu . (3)
Die ortsabhängigen Vektorfunktionen )( rk Xv sind die Formfunktionen der deformierbaren Struktur und diezeitabhängigen skalaren Funktionen )(tqk sind die so genannten modalen Koordinaten. Die Approximationsgü-te des Ritz Ansatzes (3) hängt wesentlich von der Anzahl n der verwendeten Moden ab und davon, wie gut die Moden das betrachtete elastodynamische Randwertproblem beschreiben. Der Verzerrungstensor des elastischverformten Körpers kann mit Hilfe von
n
kkrkk
n
k
Tkkr tqtqgradgradt
11)()()(
21),( XEvvXE , (4)
berechnet werden, wobei die Tensoren )( rk XE als modale Verzerrungen interpretiert werden können. Im Fall von isotropen linear elastischen Materialeigenschaften hängen die Spannungs- und Verzerrungstensoren überdas Hookesche Gesetz der linearen Elastizität miteinander zusammen:
n
kkrkr tqt
1
4)()(),( XECXT (5)
Dabei ist 4C der Elastizitätstensor vierter Stufe und dir Größen )(
4
rXEC entsprechen den so genannten moda-len Spannungstensoren.
Abb. 2: Übertragungsverhalten einer modalen Koordinate: 10123 10,10,10,10,10kD
MEHRKÖRPERSIMULATION
24 NAFEMS Magazin 1/2005
Diese kurze Diskussion hat gezeigt, dass sowohl die lokalen Verzerrungen als auch die Spannungen berechnet werden können, wenn sowohl die Formfunktionen bzw. Moden der betrachteten Struktur als auch die zugehöri-gen Zeitverläufe der modalen Koordinaten bekannt sind. Für einfache Systeme wie z.B. Balken oder Stäbe kön-nen die Moden analytisch berechnet werden. Für komplexere Strukturen, z.B. Fahrzeugkarosserien, müssen siemit Hilfe der Methode der finiten Elemente berechnet werden. Hierzu werden die Strukturen als linear elastisch und ungedämpft angenommen. Die Zeitverläufe der modalen Koordinaten )(tqk werden nach Aufbringen derRandbedingungen z.B. mit Hilfe einer Mehrkörpersimulationssoftware berechnet. Da bisher keinerlei Dämpfung angenommen wurde, haben die Differentialgleichungen, die das Zeitverhalten dermodalen Koordinaten bestimmen und von der Mehrkörpersimulationssoftware numerisch gelöst werden, die Form
)(20 tfqq kkkk , (6)
wobei unterstellt wurde, dass die Moden zueinander orthogonal sind. Die Konstanten k0 sind die Eigenkreis-frequenzen der betreffenden Formfunktionen und die zeitabhängigen Funktionen tf k sind generalisierte mo-dale Kräfte. Sie werden durch Projektion der an der elastodynamischen Struktur angreifenden Kräfte auf die ent-sprechenden Moden )( rk Xv berechnet. Falls das Frequenzspektrum der angreifenden Kräfte mit dem Eigen-frequenzspektrum k0 nk ,...,1 der betrachteten Struktur überlappt, muss mit Resonanzerscheinungen ge-rechnet werden, die zu extrem großen modalen Verschiebungen, Verzerrungen und Spannungen führen kön-nen. Um unerwünschte Resonanzeffekte zu unterdrücken bzw. vorhandene Resonanzeffekte hinsichtlich ihresAmplitudenverhaltens anpassen zu können, werden so genannte modale Dämpfungsfaktoren kD0 einge-führt:
)(2 200 tfqqDq kkkkkkk (7)
An dieser Stelle muss unbedingt angemerkt werden, dass die modalen Dämpfungen im Nachhinein eingeführtwurden und nicht, wie die modalen Eigenkreisfrequenzen, auf der Basis einer konsistenten Theorie berechnet wurden. Aus Sicht der praktischen Anwendung besteht ein wesentlicher Vorteil von (7) im Vergleich zu (6) darin, dass sich unerwünschte Resonanzeffekte bei geeigneter Wahl der Dämpfungen kD für nk ,...,1 unterdrü-cken lassen. Um den Einfluss der modalen Dämpfungen kD auf das dynamische Antwortverhalten der modalen Koordinatenabschätzen zu können, sind in Abbildung 2 der Betrag und die Phasenlage der komplexen Übertragungsfunktion
Diuq
022
0
20
0 2)(ˆ (8)
als Funktion der Frequenz dargestellt. Für die Eigenkreisfrequenz wurde ein Wert von sec20 angenom-men. Da die Beträge der Übertragungsfunktionen als Maße für die modalen Verformungen, Verzerrungen undSpannungen angesehen werden können, ist es unbedingt notwendig, realistische Zahlenwerte für die Dämpfun-gen zur Verfügung zu haben. Falls die modalen Dämpfungswerte kD nicht zutreffend sind, so können die mo-dalen Größen in der Nähe der Resonanzfrequenz über- oder unterschätzt werden. Im Fall von 21kD trittbeispielsweise kein Resonanzmaximum mehr auf. Wenn die Dämpfungen allerdings erheblich größer als 21sind, so zeigt Abbildung 2, dass der Betrag der Übertragungsfunktion selbst unter quasistatischen Belastungen,d.h. für 0 , sehr klein ist. In diesem Fall würden auch die quasistatischen Verformungen des betreffendenModes unterdrückt, was unerwünscht ist.
3 Modellierung des dynamischen Verhaltens einer Fahrzeugkarosserie Um mit der dargestellten Methode der modalen Spannungen numerische Betriebsfestigkeitsanalysen von Ge-samtfahrzeugen durchführen zu können, kann die folgende Vorgehensweise angewendet werden. Zunächst werden zutreffende Mehrkörpermodelle für die beiden Achsen, die Lenkung, den Antriebsstrang und die Reifenaufgebaut und anhand von Versuchsdaten statisch sowie dynamisch validiert. Die Modelle dürfen allerdings nicht zu komplex sein, da sie für Langzeitsimulationen auf unebenen digitalen Prüfkursen geeignet sein müssen.Sie beinhalten eine Vielzahl nichtlinearer und im Allgemeinen prozessabhängiger Kraftelemente wie z.B. E-lastomerlager, Anschläge, Dämpfer, Federn und Reifen sowie geometrische Zwangsbedingungen. Ein geeigne-tes Fahrermodell, welches zur Fahrzeugsimulation auf Schlechtwegstrecken verwendet werden kann und dasAntriebsmoment, die Bremsen und den Lenkradwinkel regelt, ist in [6] beschrieben. Exemplarische Anwendun-gen findet man in den Arbeiten [1] und [2].
MEHRKÖRPERSIMULATION

25NAFEMS Magazin 1/2005
Abb. 3: Trimmed Body Modell eines Gesamtfahrzeugs
Als Eingangsdaten für das Fahrermodell dienen der zu fahrende Kurs der virtuellen Teststrecke, das vorge-schriebene Geschwindigkeitsprofil, eine Vorausschaustrecke sowie jeweils zwei weitere Regelparameter fürLenkung, Antrieb und Bremsen. Um das gewünschte Gesamtfahrzeugmodell aufzubauen, welches die lokale und globale Verformbarkeit der Karosserie berücksichtigt, wird ferner ein statisch und dynamisch validiertes Fini-te Elemente Modell der Karosserie benötigt. Ein typisches Finite Elemente Modell, das zur Ermittlung der Form-funktionen, Eigenfrequenzen und Dämpfungen verwendet werden kann, ist in Abbildung 3 dargestellt. Zur Simulation von Betriebsfestigkeitseigenschaften mit der Methode der modalen Spannungen ist folgende Frage von Bedeutung: Wie viele Formfunktionen )(Xv k werden benötigt, um das lokale statische und dynami-sche Spannungs- und Verformungsverhalten der Karosserie abzubilden? Zur Beantwortung dieser Frage sind in Abbildung 4 die spektralen Leistungsdichten der vertikalen und der longitudinalen Radkräfte eines Fahrzeugmo-dells dargestellt, welches den virtuellen Schlechtwegkurs befahren hat. Die höchsten in den Radkräften auftre-tenden Frequenzen liegen bei 100Hz und die niedrigsten bei etwa 0.1Hz. Diese Eckfrequenzen sind durch die Fenstergröße bei der Berechnung der Leistungsdichten und die Ausgabeschrittweite bei der numerischen Integ-ration gegeben.
Abb. 4: Spektrale Leistungsdichten der Radkräfte.
Die lokalen Maxima im Frequenzbereich zwischen etwa 10Hz und 15Hz haben ihre Ursache in den überlagerten Fahrwerksschwingungen. Bei ca. 50Hz und etwa 90Hz treten Wechselwirkungen mit der rotatorischen undtranslatorischen Eigendynamik des Reifens auf. Ferner erkennt man, dass die Werte der spektralen Leistungs-dichte oberhalb von 70Hz um ca. zwei bis drei Zehnerpotenzen kleiner sind als im niederfrequenten Bereich.
MEHRKÖRPERSIMULATION

26 NAFEMS Magazin 1/2005
Aufgrund dieser Tatsache sollte das Trimmed Body oder modale Modell das dynamische Verhalten des Fahr-zeugaufbaus bis zu etwa 60Hz/70Hz beschreiben.
Abb. 5: Verteilung der Eigenfrequenzen eines freien Trimmed Body Fahrzeugaufbaus.
Zur Berechnung der Moden und Eigenfrequenzen des Fahrzeugaufbaus wird die so genannte Craig BamptonMethode angewendet. Hierzu wird das Trimmed Body Modell des Fahrzeugaufbaus als so genanntes Super-element formuliert, dessen externe Punkte durch die Anbindungsstellen der beiden Achsen, der Lenkung unddes Antriebsstranges definiert sind. Anschließend werden sämtliche dieser externen Punkte bis auf einen geo-metrisch festgehalten und an dem freien Knoten eine Einheitsverschiebung in die erste Koordinatenrichtung auf-gebracht. Das resultierende bzw. sich einstellende Verschiebungsfeld ist der so genannte erste statische Mode. Auf entsprechende Weise wird nun mit allen Freiheitsgraden (x, y, z, , , ) bzw. Koordinatenrichtungen des be-trachteten Knotens verfahren. Verfährt man anschließend mit allen externen Knoten des Superelements in die-sem Sinn, so erhält man den vollständigen Satz der statischen Moden. Spannt man alle externen Knoten geo-metrisch fest ein, und berechnet die zugehörigen Eigenmoden und -frequenzen bis hin zu einer gegebenen Fre-quenz von etwa 70Hz, so gewinnt man einen weiteren Satz an Moden, die man gern als dynamische Moden be-zeichnet. Im letzten Schritt werden alle Moden relativ zueinander orthogonalisiert, was durch numerische Lösung des Eigenwertproblems für den freien elastodynamischen Trimmed Body realisiert wird. Die mit diesem Verfah-ren berechneten Eigenfrequenzen sind in Abbildung 5 über der Modenummer aufgetragen. Der bei einer Mode-nummer von etwa 75 bzw. einer Frequenz von ca. 80Hz auftretende und schwach ausgeprägte Knick ist charak-teristisch für diese Methode und kann auf die Orthogonalisierung der statischen Moden zurückgeführt werden. Man sieht ferner, dass die die zugehörigen Eigenfrequenzen Werte von bis zu 10kHhz erreichen können. DieFrequenzen unterhalb des bei etwa 80Hz liegenden Knicks können als Eigenfrequenzen der freien Struktur in-terpretiert werden. Vergleicht man den in Abbildung 5 dargestellten Frequenzinhalt des Trimmed Body Modells mit den spektralen Leistungsdichten der Radkräfte in Abbildung 4, so erkennt man einen ausgeprägten Überlapp unterhalb von 70Hz. Aus diesem Grund muss angenommen werden, dass die unterhalb von 70Hz befindlichen Moden auf derdigitalen Schlechtwegstrecke zu Resonanzschwingungen angeregt werden können. Es ist also zwingend erfor-derlich, zutreffende Zahlenwerte für die modalen Dämpfungen zur Verfügung zu haben.
4 Abschätzung der modalen Dämpfungen Um geeignete Zahlenwerte für die modalen Dämpfungen des Fahrzeugaufbaus zu finden, bieten sich prinzipiell die Möglichkeiten an, sie zu messen, abzuschätzen oder numerisch zu berechen. Betrachtet man in Abbildung 5 den Bereich unterhalb von Modenummer 75, so liegt dort eine mittlere modale Dichte von etwa 1/Hz vor. Fernerist bekannt, dass bei komplett ausgestatteten Gesamtfahrzeugen Moden mit eng benachbarten Eigenfrequen-zen vollkommen verschiedene Formen haben können. Es ist daher sehr schwierig, gemessene und simulierte Moden, Eigenfrequenzen und Dämpfungen einander zuzuordnen. Im Falle eines realen Gesamtfahrzeugs ist esdaher unmöglich, die modalen Parameter zu messen und dem modalen Berechnungsmodell zuzuordnen.
MEHRKÖRPERSIMULATION
27NAFEMS Magazin 1/2005
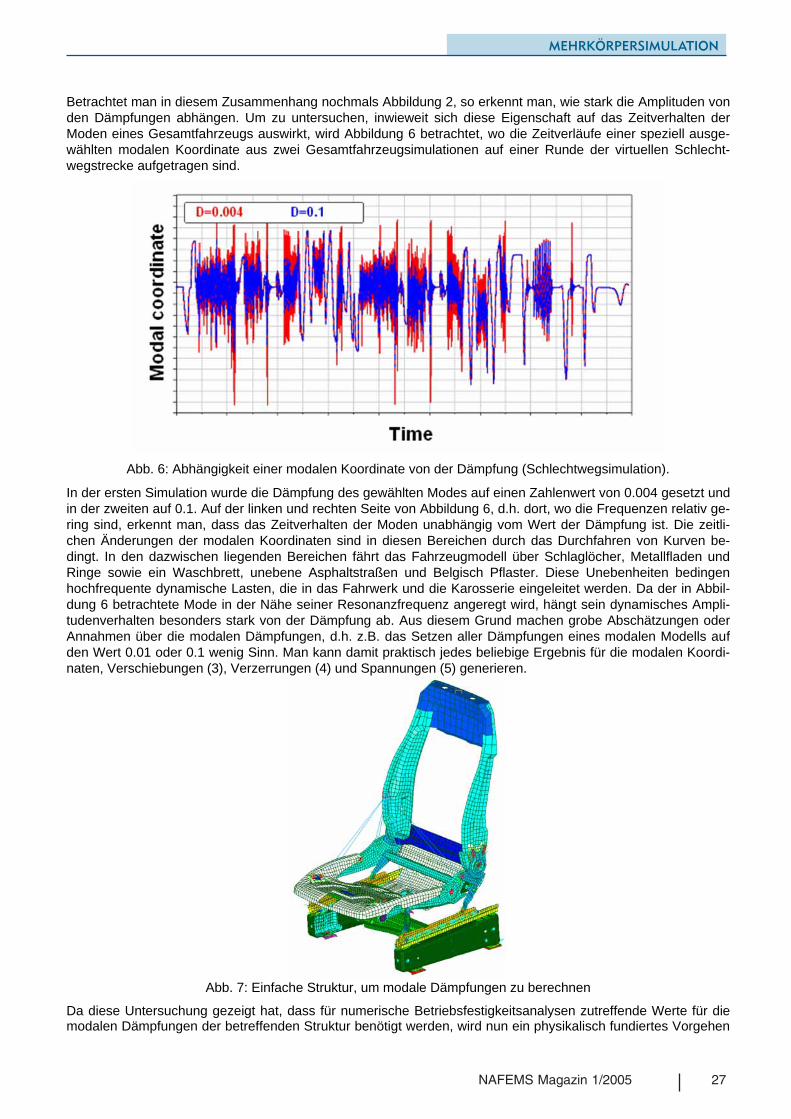
Betrachtet man in diesem Zusammenhang nochmals Abbildung 2, so erkennt man, wie stark die Amplituden von den Dämpfungen abhängen. Um zu untersuchen, inwieweit sich diese Eigenschaft auf das Zeitverhalten derModen eines Gesamtfahrzeugs auswirkt, wird Abbildung 6 betrachtet, wo die Zeitverläufe einer speziell ausge-wählten modalen Koordinate aus zwei Gesamtfahrzeugsimulationen auf einer Runde der virtuellen Schlecht-wegstrecke aufgetragen sind.
Abb. 6: Abhängigkeit einer modalen Koordinate von der Dämpfung (Schlechtwegsimulation).
In der ersten Simulation wurde die Dämpfung des gewählten Modes auf einen Zahlenwert von 0.004 gesetzt und in der zweiten auf 0.1. Auf der linken und rechten Seite von Abbildung 6, d.h. dort, wo die Frequenzen relativ ge-ring sind, erkennt man, dass das Zeitverhalten der Moden unabhängig vom Wert der Dämpfung ist. Die zeitli-chen Änderungen der modalen Koordinaten sind in diesen Bereichen durch das Durchfahren von Kurven be-dingt. In den dazwischen liegenden Bereichen fährt das Fahrzeugmodell über Schlaglöcher, Metallfladen und Ringe sowie ein Waschbrett, unebene Asphaltstraßen und Belgisch Pflaster. Diese Unebenheiten bedingenhochfrequente dynamische Lasten, die in das Fahrwerk und die Karosserie eingeleitet werden. Da der in Abbil-dung 6 betrachtete Mode in der Nähe seiner Resonanzfrequenz angeregt wird, hängt sein dynamisches Ampli-tudenverhalten besonders stark von der Dämpfung ab. Aus diesem Grund machen grobe Abschätzungen oderAnnahmen über die modalen Dämpfungen, d.h. z.B. das Setzen aller Dämpfungen eines modalen Modells aufden Wert 0.01 oder 0.1 wenig Sinn. Man kann damit praktisch jedes beliebige Ergebnis für die modalen Koordi-naten, Verschiebungen (3), Verzerrungen (4) und Spannungen (5) generieren.
Abb. 7: Einfache Struktur, um modale Dämpfungen zu berechnen
Da diese Untersuchung gezeigt hat, dass für numerische Betriebsfestigkeitsanalysen zutreffende Werte für die modalen Dämpfungen der betreffenden Struktur benötigt werden, wird nun ein physikalisch fundiertes Vorgehen
MEHRKÖRPERSIMULATION

28 NAFEMS Magazin 1/2005
beschrieben, mit dem die modalen Dämpfungen berechnet werden können. Dabei wird berücksichtigt, dass ein realer Fahrzeugaufbau eine große Zahl verschiedener dissipativer Mechanismen besitzt. Dies sind z.B. Verkle-bungen, Dichtungen, Gummilager, Schweißpunkte und Schweißnähte, Verschraubungen und Materialdämpfung. Wenn beispielsweise ein Fahrzeugaufbau in einem bestimmten Mode oszilliert, sind natürlich nicht alle dissipati-ven Mechanismen am Dämpfungsverhalten dieses Modes beteiligt, sondern nur diejenigen, bei denen dynami-sche Relativbewegungen stattfinden. Diejenigen lokalen Dämpfungsmechanismen, die in Schwingungsknotenliegen oder solche die räumlich sehr weit von dem betreffenden Mode entfernt sind, dissipieren praktisch keineEnergie. In der Regel sind für jeden Mode andere lokale Dämpfungsmechanismen relevant. Um dies anhand einer einfachen elastodynamischen Struktur zu untersuchen, wurden ausgewählte lokale Dämpfungsmechanismen des in Abbildung 7 dargestellten Fahrzeugsitzes modelliert und mit konkreten Zahlen-werten versehen. Die modalen Dämpfungen wurden numerisch berechnet, wozu die Methode der komplexen Modalanalyse verwendet wurde. Hierzu geht man von der allgemeinen vektoriellen Bewegungsgleichung
)(tFuCuduM (9)
für lineare Systeme aus, wobei CdM ,, die Massen-, Dämpfungs- und Steifigkeitsmatrizen sind. Der Vektor ubeinhaltet die Verschiebungen aller Freiheitsgrade des Systems und )(tF die angreifenden Kräfte. Die homo-gene Differentialgleichung führt auf das bekannte Eigenwertproblem
0udMC kkk ˆ2 (10)
welches N komplexe und konjugiert komplexe Eigenwerte k liefert. Da der modale Verschiebungsvektor in derallgemeinen Form
tkk
ket uu ˆ)( mit 200 1 kkkkk DiD (11)
geschrieben werden kann, entsprechen die Realteile der komplexen Eigenwerte k den Dämpfungsparameternund die Imaginärteile den Eigenfrequenzen. Im Fall eines schwach gedämpften elastodynamischen Systems gilt
1kD , so dass (11) zu
k
kkD
ImRe
(12)
vereinfacht werden kann. Diese Beziehung kann dazu verwendet werden, um die gesuchten modalen Dämpfun-gen zu berechnen.
Abb. 8: Verteilung der modalen Dämpfungen.
MEHRKÖRPERSIMULATION

29NAFEMS Magazin 1/2005
In diesem Rahmen wurden die modalen Dämpfungen der ersten 10 Moden der Sitzstruktur berechnet. Bei jederBerechnung der komplexen Eigenwerte wurde jeweils ein anderer lokaler Dämpfungsmechanismus des Sitzesaktiv gesetzt, d.h. war verschieden von Null. Alle anderen Dämpfungsmechanismen waren inaktiv. Abbildung 8 zeigt, dass jeder lokale Dämpfungsmechanismus einen unterschiedlichen Einfluss auf die modalen Dämpfungen der verschiedenen Moden hat. Beispielsweise hat die lokale Dämpfung der Sitzschiene („seat track“) einen star-ken Einfluss auf die modale Dämpfung des Modes Nr. 7. Ihr Einfluss auf die modalen Dämpfungen der anderenModen ist deutlich geringer. Im Vergleich hierzu hat die lokale Dämpfung des Höhenverstellungsmechanismus(„height ajustment“) einen starken Einfluss auf die Dämpfung der Moden Nr. 6, 8, 9 und 10. Ihr Einfluss auf den Mode Nr. 7 ist deutlich geringer. Um die modalen Dämpfungen des in Abbildung 3 dargestellten Trimmed Body Modells eines Gesamtfahrzeugs zu berechnen, wurden die benötigten lokalen Dämpfungen aus der Literatur entnommen oder abgeschätzt. Um die Qualität der Modellierung zu verbessern, sollten diese Größen für die verschiedenen Mechanismen (Verbin-dungen, Elastomerlager, etc.) auf jeden Fall durch Messungen ergänzt bzw. überprüft werden. Die gesuchten modalen Dämpfungen wurden bis hin zur Modenummer von 70 mit dem beschriebenen Verfahren der komple-xen Modalanalyse berechnet.
Abb. 9: Verteilung der modalen Dämpfungen.
Die Ergebnisse sind in Abbildung 9 dargestellt. Die modalen Dämpfungen des Kühlers wurden auf einen Wertvon 0.3 gesetzt. Die Dämpfungen der niederfrequenten Trimmed Body Moden wurden mit der komplexen Mo-dalanalyse berechnet und die Dämpfungen der hochfrequenten Moden wurden auf den Wert 0.8 gesetzt. Größe-re Dämpfungswerte werden nicht verwendet, da in diesem Fall das quasistatische Verhalten der Moden unter-drückt würde (siehe Abbildung 2).
5 Betriebsfestigkeitssimulation auf Basis modaler Spannungen Um numerische Betriebsfestigkeitssimulationen auf Basis des Konzeptes der modalen Spannungen durchführenzu können, wurde ein hybrides Gesamtfahrzeugmodell, welches das modale Modell des in Abbildung 3 darge-stellten Fahrzeugaufbaus beinhaltet, aufgebaut. Die modalen Eigenschaften des Aufbaus, d.h. die Eigenfre-quenzen und modalen Dämpfungen sowie die modalen Verschiebungen, Verzerrungen und Spannungen wur-den mit dem Finite Elemente Programm NASTRAN berechnet. Die Gesamtzahl der bei der Analyse zu berück-sichtigenden Moden ist einerseits durch den jeweils interessierenden bzw. relevanten Frequenzbereich (etwa70Hz, siehe Abbildung 4) bestimmt und andererseits durch die Anzahl der Verbindungspunkte zwischen den Ka-rosserie, Antriebsstrang, Lenkung und Fahrwerk. Insgesamt ergeben sich damit 190 Moden (siehe Abbildung 5).Die Gesamtfahrzeugsimulationen auf der digitalisierten Schlechtwegstrecke wurden mit dem Mehrkörpersimula-tionsprogramm ADAMS/CAR durchgeführt und die Betriebsfestigkeitssimulationen mit dem ProgrammsystemFEMFAT. Die Berechnungsprozesskette ist in Abbildung 10 dargestellt und Abbildung 11 zeigt den Zeitverlaufeiner der insgesamt 190 modalen Koordinaten. Die Fahrzeit, um eine Runde des virtuellen Schlechtwegkurseszu befahren, beträgt 450 Sekunden und das hybride Gesamtfahrzeugmodell hat ohne Reifen etwa 400 mecha-
MEHRKÖRPERSIMULATION

30 NAFEMS Magazin 1/2005
nische Freiheitsgrade. Die Reifen wurden mit dem Modell RMOD-K simuliert, wobei jeder Reifen 300 mechani-sche Freiheitsgrade innerhalb des Gürtels besitzt und etwa 100 Freiheitsgrade für die Lauffläche. Weitere De-tails bezüglich des Reifenmodells sind in [1] und den darin enthaltenen Literaturzitaten beschrieben.
Abb. 10: Prozesskette der modalen Betriebsfestigkeitsanalyse (aus [7])
Die gesamte virtuelle Testprozedur besteht aus vier Runden von jeweils etwa 450 Sekunden Fahrzeit, die mitverschiedenen Fahrgeschwindigkeitsprofilen und Bodentopologien und zur Abbildung von Fahrerstreuung mitunterschiedlichen Einstellungen des Fahrermodells gefahren werden.
Abb. 11: Zeitverhalten einer modalen Koordinate.
Selbst bei paralleler Berechnung der vier Runden auf zwei Hewlett Packard Workstations mit Doppelprozesso-ren liegt die notwendige Rechenzeit bei etwa zwei Wochen. Diese Simulationen liefern als Ergebnis 190 Zeitrei-hen mit den modalen Koordinaten, wobei jede einzelne Zeitreihe 1800 Sekunden lang ist. Die Ausgabeschritt-weite beträgt 5x10-3 Sekunden. Zur Berechnung der lokalen Betriebsfestigkeitseigenschaften der Fahrzeugkarosserie werden für jeden ausge-gebenen Zeitpunkt die modalen Koordinaten mit den entsprechenden modalen Spannungen multipliziert und über alle Modenummern aufsummiert. Die damit erhaltenen lokalen zeitabhängigen Spannungen werden mitden üblichen Standardverfahren zur Lebensdauerberechnung mit Hilfe des Programms FEMFAT ausgewertet
MEHRKÖRPERSIMULATION

31NAFEMS Magazin 1/2005
Abb. 12: Simulierte Schädigungen in einer Reserveradmulde
Im Rahmen eines Beispiels ist in Abbildung 12 ein Ausschnitt aus der mit dieser Methode ermittelten Schädi-gungsverteilung dargestellt. Die physikalische Ursache für diese Schädigung ist das Schwingungsverhalten des Reserverades wenn das Fahrzeug über die unebene Teststrecke fährt.
6 Resümee Um das Lebensdauer- bzw. Schädigungsverhalten statisch und dynamisch beanspruchter elastodynamischerStrukturen und Bauteile zu simulieren, wird die Methode der modalen Spannungen angewendet und in Verbin-dung mit virtueller Schlechtwegsimulation auf digitalen Teststrecken mit hybriden Gesamtfahrzeugmodellen ein-gesetzt. Ein wesentliches Ergebnis des Projektes ist, dass die simulierten Betriebsfestigkeitsergebnisse sehr gut mit der experimentellen Erfahrung übereinstimmen, wenn die modalen Dämpfungen der beteiligten flexiblen Körper zutreffend gewählt werden. Da die Messung aller modalen Dämpfungen bei ausgestatteten Fahrzeugka-rosserien praktisch unmöglich ist, wurden sie anhand eines lokal bedämpften Finite Elemente Modells mit Hilfe der Methode der komplexen Modalanalyse berechnet. Um die Methode der Betriebsfestigkeitssimulation mit modalen Spannungen besser in den Entwicklungsprozessen einsetzen zu können, ist es notwendig, die Re-chenzeit zu reduzieren und handhabbare Softwaretools zu entwickeln, mit denen man die modalen Dämpfungen großer elastodynamischer Strukturen berechnen kann. Ferner muss die Handhabung und der Umgang mit gro-ßen Datenmengen im Bereich von einigen 10 Gigabyte verbessert werden.
7 Literatur [1] Eichler, M., Lion, A.: Gesamtfahrzeugsimulationen auf Prüfstrecken zur Bestimmung von Lastkollektiven,
VDI Bericht 1559, Berechnung und Simulation im Fahrzeugbau, 2000, 369-398. [2] Kaps, L., Lion, A. Stolze, F. Zhang, G.: Ganzheitliche Analyse von Fahrzeugprototypen mit Hilfe von virtu-
ellen Fahrzeugmodellen und virtuellen Prüfgeländen, VDI Bericht 1701, Berechnung und Simulation im Fahrzeugbau, 2002, 653-678.
[3] Stenger, R., Johna-Lin, E., Skiadas, A.: Integration der Lebensdauersimulation in den Fahrzeug Entwick-lungsprozess, VDI Bericht 1701, Berechnung und Simulation im Fahrzeugbau, 2002, 615-626.
[4] Shabana, A. A.: Computational Dynamics, 1994, John Wiley & sons. [5] Shabana, A. A.: Dynamics of Multibody Systems, 1998, Cambridge University Press. [6] Du, Y. Lion, A., Maisser, P.: Modelling and Control of an Electromechanical Steering System in Full Vehi-
cle Models, Journal of Systems and Control Engineering, submitted for publication. [7] Riener, H., Peiskammer, D., Witteveen, W., Lion, A.: Modal Durability Analysis of a Passenger Cars Front
Supporting Frame due to Full Vehicle Simulation Loads, Proceedings of the ADAMS User conference 2001, North America.
[8] Maisser, P.: Dynamik hybrider Mehrkörpersysteme aus kontinuumsmechanischer Sicht, Zeitschrift für an-gewandte Mathematik und Mechanik 76, 1996, 15-33.
MEHRKÖRPERSIMULATION
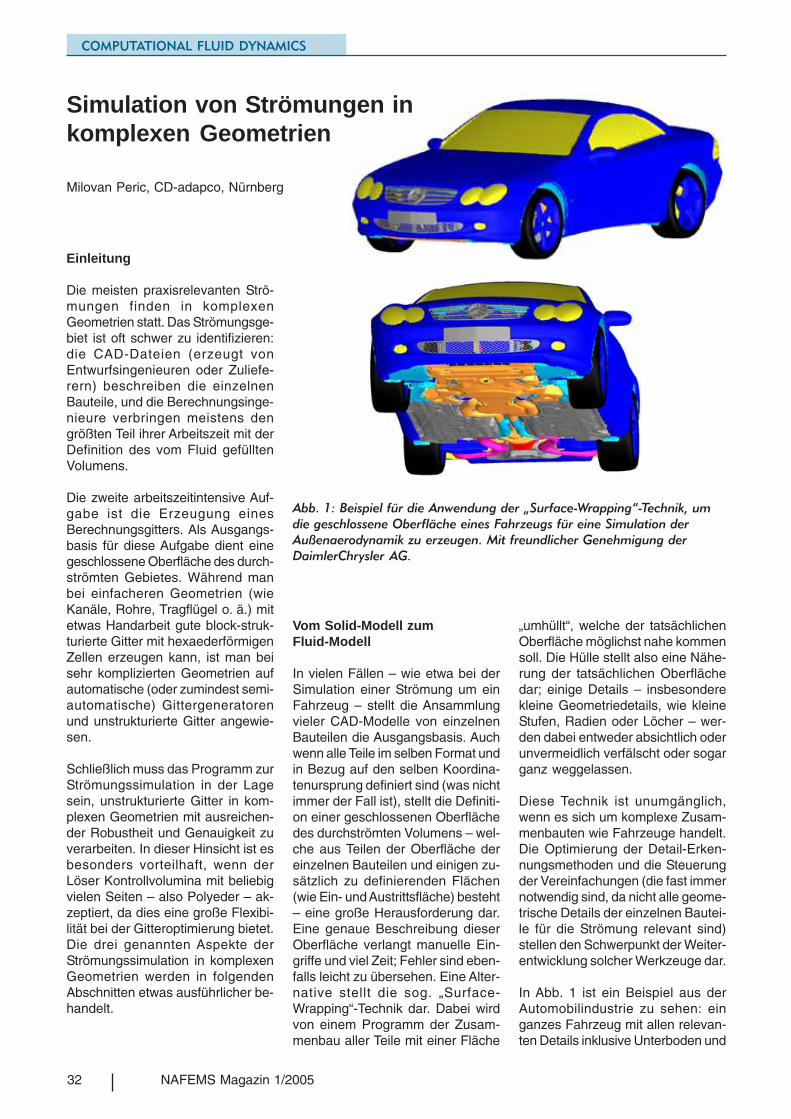
32 NAFEMS Magazin 1/2005
COMPUTATIONAL FLUID DYNAMICS
Einleitung
Die meisten praxisrelevanten Strö-mungen finden in komplexenGeometrien statt. Das Strömungsge-biet ist oft schwer zu identifizieren:die CAD-Dateien (erzeugt vonEntwurfsingenieuren oder Zuliefe-rern) beschreiben die einzelnenBauteile, und die Berechnungsinge-nieure verbringen meistens dengrößten Teil ihrer Arbeitszeit mit derDefinition des vom Fluid gefülltenVolumens.
Die zweite arbeitszeitintensive Auf-gabe ist die Erzeugung einesBerechnungsgitters. Als Ausgangs-basis für diese Aufgabe dient einegeschlossene Oberfläche des durch-strömten Gebietes. Während manbei einfacheren Geometrien (wieKanäle, Rohre, Tragflügel o. ä.) mitetwas Handarbeit gute block-struk-turierte Gitter mit hexaederförmigenZellen erzeugen kann, ist man beisehr komplizierten Geometrien aufautomatische (oder zumindest semi-automatische) Gittergeneratorenund unstrukturierte Gitter angewie-sen.
Schließlich muss das Programm zurStrömungssimulation in der Lagesein, unstrukturierte Gitter in kom-plexen Geometrien mit ausreichen-der Robustheit und Genauigkeit zuverarbeiten. In dieser Hinsicht ist esbesonders vorteilhaft, wenn derLöser Kontrollvolumina mit beliebigvielen Seiten – also Polyeder – ak-zeptiert, da dies eine große Flexibi-lität bei der Gitteroptimierung bietet.Die drei genannten Aspekte derStrömungssimulation in komplexenGeometrien werden in folgendenAbschnitten etwas ausführlicher be-handelt.
Simulation von Strömungen inkomplexen Geometrien
Milovan Peric, CD-adapco, Nürnberg
Vom Solid-Modell zumFluid-Modell
In vielen Fällen – wie etwa bei derSimulation einer Strömung um einFahrzeug – stellt die Ansammlungvieler CAD-Modelle von einzelnenBauteilen die Ausgangsbasis. Auchwenn alle Teile im selben Format undin Bezug auf den selben Koordina-tenursprung definiert sind (was nichtimmer der Fall ist), stellt die Definiti-on einer geschlossenen Oberflächedes durchströmten Volumens – wel-che aus Teilen der Oberfläche dereinzelnen Bauteilen und einigen zu-sätzlich zu definierenden Flächen(wie Ein- und Austrittsfläche) besteht– eine große Herausforderung dar.Eine genaue Beschreibung dieserOberfläche verlangt manuelle Ein-griffe und viel Zeit; Fehler sind eben-falls leicht zu übersehen. Eine Alter-native stellt die sog. „Surface-Wrapping“-Technik dar. Dabei wirdvon einem Programm der Zusam-menbau aller Teile mit einer Fläche
„umhüllt“, welche der tatsächlichenOberfläche möglichst nahe kommensoll. Die Hülle stellt also eine Nähe-rung der tatsächlichen Oberflächedar; einige Details – insbesonderekleine Geometriedetails, wie kleineStufen, Radien oder Löcher – wer-den dabei entweder absichtlich oderunvermeidlich verfälscht oder sogarganz weggelassen.
Diese Technik ist unumgänglich,wenn es sich um komplexe Zusam-menbauten wie Fahrzeuge handelt.Die Optimierung der Detail-Erken-nungsmethoden und die Steuerungder Vereinfachungen (die fast immernotwendig sind, da nicht alle geome-trische Details der einzelnen Bautei-le für die Strömung relevant sind)stellen den Schwerpunkt der Weiter-entwicklung solcher Werkzeuge dar.
In Abb. 1 ist ein Beispiel aus derAutomobilindustrie zu sehen: einganzes Fahrzeug mit allen relevan-ten Details inklusive Unterboden und
Abb. 1: Beispiel für die Anwendung der „Surface-Wrapping“-Technik, um
die geschlossene Oberfläche eines Fahrzeugs für eine Simulation der
Außenaerodynamik zu erzeugen. Mit freundlicher Genehmigung der
DaimlerChrysler AG.

33NAFEMS Magazin 1/2005
COMPUTATIONAL FLUID DYNAMICS
Motorraum wurde mit einer einzigen,geschlossenen Oberfläche umhüllt,welche die tatsächliche Form derGeometrie recht genau wiedergibt.Statt einer wochenlangen manuellenZusammenfügung der einzelnenFlächen aus CAD-Modellen der ver-schiedenen Bauteile kann eine sol-che Hülle in einigen Stunden fastautomatisch erstellt werden.
Wenn alle Bauteile im selben CAD-System erstellt wurden, kann oft einegenaue Definition des durchström-ten Volumens in diesem CAD-Sy-stem erzielt werden. Sollten dazuVariationen der Geometrie unter-sucht werden, liegen die Vorteile derNutzung dieses CAD-Systems alsArbeitsumgebung auf der Hand. CD-adapco bietet daher CAD-eingebet-tete Lösungen, wobei die Werkzeu-ge zur Gittergenerierung, Simulati-on von Strömung und Wärmeüber-gang, sowie grafischer Bearbeitungder Ergebnisse in das jeweiligeCAD-System integriert werden. So-mit können Ingenieure, die mit derBedienung eines CAD-Systems ver-traut sind, in der gewohnten Umge-bung auch Strömungssimulationendurchführen. Dabei werden die Än-derungen der Geometrie von allenWerkzeugen erkannt, so dass dieWiederholung der Berechnung füreine modifizierte Geometrie automa-tisch erfolgen kann.
Gittergenerierung
Wie eingangs erwähnt stellen un-strukturierte Gitter die einzige Wahlfür komplexe Geometrien dar. Amweitesten verbreitet und am einfach-sten zu erzeugen sind Gitter beste-hend aus tetraederförmigen Elemen-ten. Die Tetraeder sind jedoch, ausmehreren Gründen, als Kontrollvolu-men für die Finite-Volumen-Metho-de zur Strömungsberechnung nichtoptimal (mehr dazu im nächsten Ab-schnitt). Deshalb wurden in den letz-ten Jahren andere Methoden zur au-tomatischen Generierung von un-strukturierten Gittern bestehend ausPolyedern entwickelt. Eine dieserMethode – bei CD-adapco seit über5 Jahren im Einsatz – beruht aufgetrimmten Hexaedergittern. DieseMethode kann nur eingesetzt wer-den, wenn der Strömungslöser all-gemeine Polyederzellen mit beliebigvielen Seiten zulässt. Dabei wirdzuerst ein reguläres, meistkartesisches Gitter (ggf. mit lokalerVerfeinerung um die Wände und inanderen Gebieten, die eine höhereAuflösung verlangen) erzeugt, dassden ganzen Raum zwischen mini-malen und maximalen Koordinatendes Lösungsgebietes abdeckt. Nunwird dieses Gitter mit der geschlos-senen Oberfläche des tatsächlichenLösungsgebietes geschnitten, undder außen liegende Teil wird verwor-fen. Die geschnittenen Zellen sind
i. Allg. Polyeder, während die restli-chen Zellen ihre reguläre Form bei-behalten.
Problematisch an dieser Methodeist, dass die geschnittenen Zellenentlang den Wänden liegen und un-ter Umständen schlechte Eigen-schaften haben können (z. B. kon-kav). Da in den meisten Fällen inWandnähe die höchste Qualität vomGitter verlangt wird, um die Grenz-schichteffekte (Wandschubspan-nung, Wärmefluss) mit ausreichen-der Genauigkeit berechnen zu kön-nen, ist es wünschenswert, die ge-trimmten Zellen von der Wand zuentfernen. Dies wird erreicht, indemman das Hintergrundgitter nicht mitder tatsächlichen Oberfläche desStrömungsgebietes schneidet, son-dern mit einer Fläche, die auf einembestimmten Abstand von den Wän-den liegt (sog. „Subsurface“). DieErzeugung dieser Hilfsfläche stellteine Herausforderung dar, da inkomplexen Geometrien oft viele Flä-chen nah beieinander liegen und esaußerdem viele scharfe Kanten gibt.Wenn die Grenzschichteffekte wich-tig sind, muss man aus Genauig-keitsgründen eine Prismenschichtentlang den Wänden haben, unab-hängig vom Typ der Kontrollvolu-mina. Meistens wird das Oberflä-chengitter von der Hilfsfläche auf dieRandfläche projiziert und die so ent-standenen Volumina werden dann inmehrere wandparallele Schichtenunterteilt.
Seit einiger Zeit werden auch Gitterbestehend aus Polyederzellen ver-wendet; Abb. 2 zeigt den Schnittdurch ein derartiges Gitter um einenRennwagen. Solche Gitter werdenautomatisch erzeugt, haben aber inder Regel bessere Eigenschaften alsTetraedergitter. Wichtig ist auch,dass die Möglichkeiten zur Optimie-rung der Gitterqualität bei einemPolyedergitter viel größer sind als beieinem Gitter bestehend ausKontrollvolumina von nur einem be-stimmten Typ (Tetraeder oder He-xaeder). Hier können nach Beliebeneinzelne Kanten, Seiten oder ganzeVolumina entfernt oder geteilt wer-den – da jede geometrische Formzulässig ist, kann sie nach lokalen
Abb. 2: Automatisch erzeugtes Polyedergitter um ein Rennfahrzeug. Mit
freundlicher Genehmigung von CD-adapco (CD-adapco ist offizieller
Liferant der CFD-Software für das Renault F1 Team).

34 NAFEMS Magazin 1/2005
Gegebenheiten und Qualitätsmerk-malen (z. B. Konvexität, Orthogo-nalität des Vektors, der die benach-barten Zellzentren verbindet, zu dergemeinsamen Trennfläche usw.)gewählt werden.
Lösungsmethoden
Die am weitesten verbreitete Metho-de zur Strömungssimulation ist dieFinite-Volumen-Methode. Die Er-haltungsgleichungen in Integralformdienen als Ausgangsbasis; die Flä-chen- und Volumenintegrale werdenüber die einzelnen Flächen undKontrollvolumina approximiert, wasschließlich zu einem System alge-braischer Gleichungen führt. Daseinfachste Kontrollvolumen ist derTetraeder. Da hier nur vier unmittel-bare Nachbarzellen vorliegen, rei-chen die einfachen Approximationender Integrale (Mittelpunktregel, linea-re Interpolation) oft nicht aus, umeine gute Genauigkeit zu erreichen.Typischerweise benötigt man – bei
denselben Approximationen – ca.sechsmal so viele Zellen wie beiHexaedern, um die gleiche Genau-igkeit zu erreichen. Polyederzellendagegen haben typischerweise ca.12 unmittelbare Nachbarn, so dassauch mit den einfachen Approxima-tionen eine gute Genauigkeit erreichtwird. Tests haben gezeigt, dass manfür die gleiche Genauigkeit ca. fünf-mal weniger Zellen, halb so viel Spei-cher und bis zu einer Größenord-nung weniger Rechenzeit benötigt,wenn Polyeder statt Tetraeder alsKontrollvolumina im Gitter verwen-det werden1 . Abbildung 3 zeigtStromlinien um Passagiere in einemFlugzeug, berechnet auf einem au-tomatisch erzeugten Polyedergitter.
Die Fähigkeit, beliebige Polyeder alsZellen zu verarbeiten, ist auch ausanderen Gründen im Löser von gro-ßem Vorteil. Selbst wenn das Gitteraus quaderförmigen (kartesischen)Zellen besteht, ist es nützlich, beilokalen Verfeinerungen, nichtpas-senden Gitterblöcken, periodischen
Abb. 3: Stromlinien um Passagiere in einem Flugzeug, berechnet auf
einem automatisch erzeugten Polyedergitter.
Mit freundlicher Genehmigung von CD-adapco.
Rändern und gleitenden Trennflä-chen, die Zellen entlang der Grenz-flächen als Polyeder zu definieren.Somit entfällt eine besondere Be-handlung dieser speziellen Situatio-nen im Löser, was zu einer leichte-ren Erweiterbarkeit und Wartung desRechenprogramms führt.
Schlussfolgerung
Die Trends für eine weitere Steige-rung der Produktivität und eine bes-sere Integration der Strömungs-simulation im rechnergestützten In-genieurwesen führen zu:
• Optimierung der Gitterqualität (in-klusive automatischer Gitteran-passung an beweglichen Rän-dern),
• Erweiterung der Berechnungs-verfahren auf allgemeineKontinuumsmechanik (CCM –Computational ContinuumMechanics),
• Entwicklung von Expertensyste-men für spezifische Anwen-dungsgebiete,
• Entwicklung neuer Software fürZukunftsaufgaben (Gitter mitGrößenordnung von einer Milli-arde Zellen, direkte und Grob-struktursimulation, Daten-reduktion und Analyse von Er-gebnissen usw.).
CD-adapco ist bemüht, einen we-sentlichen Beitrag zur Entwicklungdieser neuen Technologien zu lei-sten.
____________________________
1 Siehe M. Peric and S. Ferguson:The advantage of polyhedralmeshes, dynamics #24, Spring2005, CD-adapco.
COMPUTATIONAL FLUID DYNAMICS
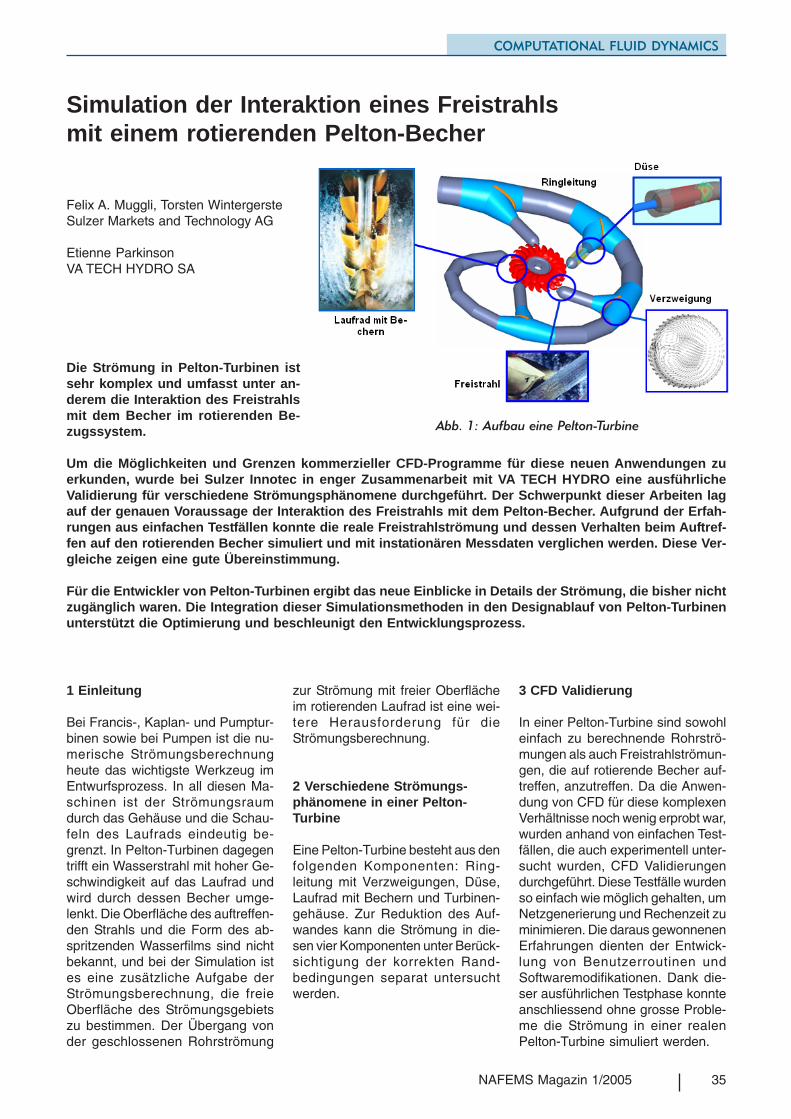
35NAFEMS Magazin 1/2005
COMPUTATIONAL FLUID DYNAMICS
1 Einleitung
Bei Francis-, Kaplan- und Pumptur-binen sowie bei Pumpen ist die nu-merische Strömungsberechnungheute das wichtigste Werkzeug imEntwurfsprozess. In all diesen Ma-schinen ist der Strömungsraumdurch das Gehäuse und die Schau-feln des Laufrads eindeutig be-grenzt. In Pelton-Turbinen dagegentrifft ein Wasserstrahl mit hoher Ge-schwindigkeit auf das Laufrad undwird durch dessen Becher umge-lenkt. Die Oberfläche des auftreffen-den Strahls und die Form des ab-spritzenden Wasserfilms sind nichtbekannt, und bei der Simulation istes eine zusätzliche Aufgabe derStrömungsberechnung, die freieOberfläche des Strömungsgebietszu bestimmen. Der Übergang vonder geschlossenen Rohrströmung
zur Strömung mit freier Oberflächeim rotierenden Laufrad ist eine wei-tere Herausforderung für dieStrömungsberechnung.
2 Verschiedene Strömungs-phänomene in einer Pelton-Turbine
Eine Pelton-Turbine besteht aus denfolgenden Komponenten: Ring-leitung mit Verzweigungen, Düse,Laufrad mit Bechern und Turbinen-gehäuse. Zur Reduktion des Auf-wandes kann die Strömung in die-sen vier Komponenten unter Berück-sichtigung der korrekten Rand-bedingungen separat untersuchtwerden.
Simulation der Interaktion eines Freistrahlsmit einem rotierenden Pelton-Becher
Felix A. Muggli, Torsten WintergersteSulzer Markets and Technology AG
Etienne ParkinsonVA TECH HYDRO SA
Die Strömung in Pelton-Turbinen istsehr komplex und umfasst unter an-derem die Interaktion des Freistrahlsmit dem Becher im rotierenden Be-zugssystem.
Um die Möglichkeiten und Grenzen kommerzieller CFD-Programme für diese neuen Anwendungen zuerkunden, wurde bei Sulzer Innotec in enger Zusammenarbeit mit VA TECH HYDRO eine ausführlicheValidierung für verschiedene Strömungsphänomene durchgeführt. Der Schwerpunkt dieser Arbeiten lagauf der genauen Voraussage der Interaktion des Freistrahls mit dem Pelton-Becher. Aufgrund der Erfah-rungen aus einfachen Testfällen konnte die reale Freistrahlströmung und dessen Verhalten beim Auftref-fen auf den rotierenden Becher simuliert und mit instationären Messdaten verglichen werden. Diese Ver-gleiche zeigen eine gute Übereinstimmung.
Für die Entwickler von Pelton-Turbinen ergibt das neue Einblicke in Details der Strömung, die bisher nichtzugänglich waren. Die Integration dieser Simulationsmethoden in den Designablauf von Pelton-Turbinenunterstützt die Optimierung und beschleunigt den Entwicklungsprozess.
3 CFD Validierung
In einer Pelton-Turbine sind sowohleinfach zu berechnende Rohrströ-mungen als auch Freistrahlströmun-gen, die auf rotierende Becher auf-treffen, anzutreffen. Da die Anwen-dung von CFD für diese komplexenVerhältnisse noch wenig erprobt war,wurden anhand von einfachen Test-fällen, die auch experimentell unter-sucht wurden, CFD Validierungendurchgeführt. Diese Testfälle wurdenso einfach wie möglich gehalten, umNetzgenerierung und Rechenzeit zuminimieren. Die daraus gewonnenenErfahrungen dienten der Entwick-lung von Benutzerroutinen undSoftwaremodifikationen. Dank die-ser ausführlichen Testphase konnteanschliessend ohne grosse Proble-me die Strömung in einer realenPelton-Turbine simuliert werden.
Abb. 1: Aufbau eine Pelton-Turbine

36 NAFEMS Magazin 1/2005
COMPUTATIONAL FLUID DYNAMICS
3.1 Validierung der Freistrahl-strömung
Die Qualität des Freistrahls hat gros-sen Einfluss auf den Wirkungsgradeiner Pelton-Turbine. Aufgrund vonSekundärströmungen in der Ring-leitung und in den Verzweigungen istder Strahl beim Austritt aus der Düsenicht kreisförmig. Wenn die Strö-mungsberechnung einer Pelton-Tur-bine mit grosser Genauigkeit erfol-gen soll, muss die Strömungssimula-tion diesen Einfluss der Zuström-bedingungen auf die Strahlform ein-deutig wiedergeben. In einem ein-fachen Prüfstand untersuchte SulzerInnotec die Form eines Freistrahlsaus einer Modelldüse mit geraderbzw. mit gekrümmter Zuleitung. DerRohrkrümmer vor der Düse generierteine Sekundärströmung, derenEinfluss auf den Freistrahl unter-sucht werden konnte. Um die Formdes Wasserstrahls nicht zu stören,wurden die Geschwindigkeits-komponenten in vier Querschnittenim Strahlinnern und in einem Quer-schnitt vor dem Düsenaustritt mitdem Laser Doppler Anemometer(LDA) berührungslos gemessen. ImWeiteren wurden auch der Massen-strom und Druck erfasst.
Für die Berechnung der Freistrahl-strömung wurde das Volume of FluidModell (VOF) eingesetzt. Der Ver-gleich der Messergebnisse mit dendurchgeführten Strömungsrechnun-gen zeigt eine gute Übereinstim-
mung. Der Einfluss der gekrümmtenZuleitung auf die Strahlform konntemit hoher Genauigkeit simuliert wer-den. Die im Prüfstand beobachteteSträhne am Freistrahl, die aufgrundder Sekundärströmung entsteht,konnte mittels CFD ebenfalls sicht-bar gemacht werden. Unter Berück-sichtigung der Vorgeschichte derStrömung (Sekundärströmung durchKrümmer) kann die korrekte Formdes Freistrahls genau vorausgesagtwerden.
3.2 Testfall: Freistrahl trifft aufebene Platte
Zur Validierung der Interaktion einesFreistrahls mit einem Pelton-Becherwurde an der EidgenössischenTechnischen Hochschule (EPFL) inLausanne ein einfacher Versuchs-stand aufgebaut. Eine Modelldüseeiner Pelton-Turbine wurde über ei-ner kippbaren, flachen Platte ange-bracht, die mit Drucksensoren be-stückt ist. Mittels Fotografien wurdendie Strahlform und der Flüssigkeits-film auf der Platte bei drei verschie-denen Neigungswinkeln festgehal-ten.
Der Vergleich zeigt eine gute Über-einstimmung zwischen den gemes-senen und berechneten Druck-koeffizienten. Die geringen Unter-schiede sind auf die Verwendungeines uniformen Geschwindigkeits-profils bei den Simulationen zurück-zuführen. Im Experiment wurde das
Modell einer realen Pelton-Düseverwendet, die aufgrund der Nadelin der Düsenmitte eine Delle imGeschwindigkeitsprofil des Frei-strahls aufweist.
Dieser Testfall erbrachte den Be-weis, dass mittels der numerischenStrömungsberechnung die durchdas Auftreffen des Freistrahls be-wirkte Druckbelastung gut vorausge-sagt werden kann. Eine gute Voraus-sage der Becherbelastung ist für dieweitere Entwicklung von Pelton-Tur-binen von grosser Bedeutung.
3.3 Interaktion eines Freistrahlsmit einer rotierenden Platte
In Wirklichkeit trifft der Freistrahl aufeinen rotierenden Becher. Deshalbwurde der oben beschriebene Test-fall ins rotierende Bezugssystemumgesetzt. Daraus entstand ein ein-faches Wasserrad mit sechs flachenPlatten. Dieser Testfall umfasst allephysikalischen Phänomene wie siebei einer realen Pelton-Turbine vor-handen sind: Das Auftreffen einesFreistrahls auf eine rotierendeWand, das Zerschneiden des Frei-strahls durch eine Kante und dasAblösen des Wasserfilms von einerWand. Dank der einfachen Geome-trie ist aber der Rechenaufwand vielgeringer als bei der Simulation einerrealen Maschine.
Für diese Validierung wurde keineVersuchseinrichtung aufgebaut. Die
Abb. 3: Simulation der Freistrahl-
strömung nach einem 90°
Krümmer
Abb. 2: Freistrahl nach einem 90o
Krümmer
Abb. 4: Interaktion Freistrahl – ebene Platte (EPFL Lausanne)

37NAFEMS Magazin 1/2005
COMPUTATIONAL FLUID DYNAMICS
berechneten Resultate wurden auf-grund von qualitativen Beobachtun-gen bewertet. Vorlauf und Form vonFreistrahl und Wasserfilmen ent-sprachen weitgehend den Beobach-tungen im Prüfstand.
4 Simulation der Strömung in ei-ner realen Pelton-Turbine
Die durchgeführten Validierungs-tests zeigten, dass die eingesetztenCFD-Programme für die instationäreBerechnung von Freistrahlströmun-gen und deren Interaktion mit Be-chern im rotierenden System ver-wendet werden kann. Als logischeWeiterführung wurde deshalb dasVerfahren für ein reales Pelton-Lauf-rad verwendet. Die Tests zeigtenaber auch, dass die korrekte Voraus-sage von der Form des Freistrahlssowie der Becherbelastung sehrschwierig sind. Deshalb waren ge-wisse Unterschiede zwischen denberechneten und gemessenen Re-sultaten zu erwarten.
Bei allen Simulationen wird ange-nommen, dass die Strömung durchbeide Hälften des Bechers identischist. Deshalb wurde nur jeweils einhalber Becher mit einem Rechen-netz diskretisiert und Symmetrie-randbedingungen eingesetzt.
In einem ersten Schritt wurde einViertel eines Laufrades modelliert.Zur Vereinfachung des Simulations-modells wurde anstelle einer realenDüse der Anfang des Freistrahls mit
entsprechenden Einlassrandbedin-gungen vorgegeben. Mit zunehmen-der Erfahrung wurden die Modelleumfangreicher. Weitere Simulatio-nen umfassten die Düse, das ge-samte Laufrad mit allen Freistrahlenund zum Schluss eine kompletteTurbine mit Ringleitung. Dank derintensiven Validierungsphasemusste das numerische Vorgehenfür diese realen Anwendungen kaummehr weiter modifiziert werden.Mit diesen ersten Simulationenkonnte das Zerschneiden des Frei-strahls mit dem Becher schon gutgezeigt werden. Ebenfalls gut wie-dergegeben wurden der Verlauf desWasserfilms im Becher und dessenAblösen an den Becherrändern.
Im Versuchsstand bei VA TECHHYDRO in Vevey wurden in einerHälfte eines Peltonbechers 30 Sen-soren platziert, welche dentransienten Druckverlauf aufneh-
Abb. 5: Einblick in den Prüfstand (VA TECH HYDRO, Vevey)
und Visualisierung einer Strömungssimulation
men. Vergleiche mit diesen Mess-daten zeigen, dass im Zentrum desBechers, wo der Freistrahl ungestörtauftritt, die Belastung sehr gut vor-ausgesagt werden kann. In der Näheder Becherwurzel, wo der Freistrahldurch den nachfolgenden Becherangeschnitten wird, liegen die be-rechneten Druckverläufe leicht hö-her im Vergleich zu den gemesse-nen. Eine Netzverfeinerung im Be-reich der Becherkante könnte dieseResultate verbessern.
5 Interpretation der Simulations-ergebnisse
Die Entwicklung neuer Pelton-Lauf-räder basierte bis anhin auf viel Er-fahrung und Daten aus dem Prüf-stand. Wegen des vielen Spritz-wassers in einer Pelton-Turbine er-geben Beobachtungen im Prüfstandwenig Einblick in die Strömung.
Die folgenden vier Strömungs-phänomene sind für die Entwicklungvon Pelton-Turbinen von äusserstgrosser Bedeutung (vgl. Abb. 7):
• Interaktion zwischen dem Frei-strahl und den Becherkanten (1)
• Die genaue Lage und Dicke desWasserfilms im Becher (2)
• Einfluss des nachfolgenden Be-chers auf die Strömung im voranlaufenden Becher (3)
• Entleerung des Bechers vor Ein-tritt des nächsten Freistrahls (4)
Abb. 6: Gemessene und berechnete Druckverläufe auf der
Becherinnenseite (Messungen: VA TECH HYDRO, Vevey)
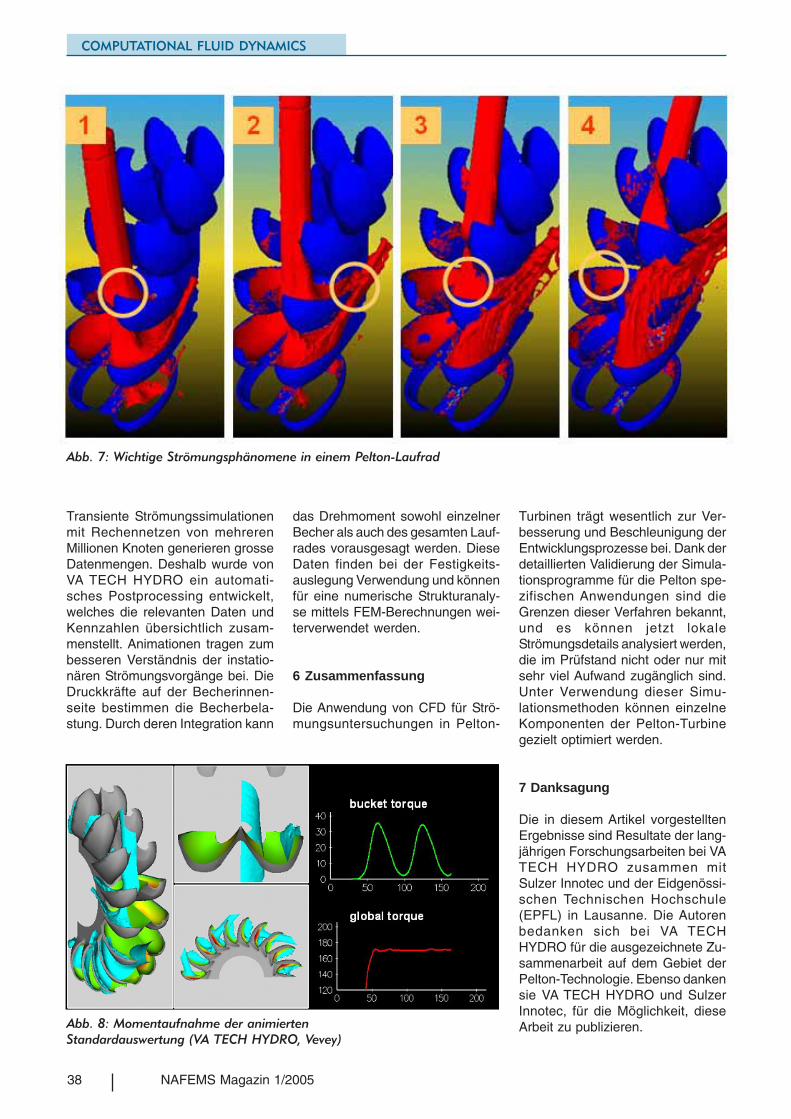
38 NAFEMS Magazin 1/2005
Transiente Strömungssimulationenmit Rechennetzen von mehrerenMillionen Knoten generieren grosseDatenmengen. Deshalb wurde vonVA TECH HYDRO ein automati-sches Postprocessing entwickelt,welches die relevanten Daten undKennzahlen übersichtlich zusam-menstellt. Animationen tragen zumbesseren Verständnis der instatio-nären Strömungsvorgänge bei. DieDruckkräfte auf der Becherinnen-seite bestimmen die Becherbela-stung. Durch deren Integration kann
Abb. 7: Wichtige Strömungsphänomene in einem Pelton-Laufrad
Abb. 8: Momentaufnahme der animierten
Standardauswertung (VA TECH HYDRO, Vevey)
das Drehmoment sowohl einzelnerBecher als auch des gesamten Lauf-rades vorausgesagt werden. DieseDaten finden bei der Festigkeits-auslegung Verwendung und könnenfür eine numerische Strukturanaly-se mittels FEM-Berechnungen wei-terverwendet werden.
6 Zusammenfassung
Die Anwendung von CFD für Strö-mungsuntersuchungen in Pelton-
Turbinen trägt wesentlich zur Ver-besserung und Beschleunigung derEntwicklungsprozesse bei. Dank derdetaillierten Validierung der Simula-tionsprogramme für die Pelton spe-zifischen Anwendungen sind dieGrenzen dieser Verfahren bekannt,und es können jetzt lokaleStrömungsdetails analysiert werden,die im Prüfstand nicht oder nur mitsehr viel Aufwand zugänglich sind.Unter Verwendung dieser Simu-lationsmethoden können einzelneKomponenten der Pelton-Turbinegezielt optimiert werden.
7 Danksagung
Die in diesem Artikel vorgestelltenErgebnisse sind Resultate der lang-jährigen Forschungsarbeiten bei VATECH HYDRO zusammen mitSulzer Innotec und der Eidgenössi-schen Technischen Hochschule(EPFL) in Lausanne. Die Autorenbedanken sich bei VA TECHHYDRO für die ausgezeichnete Zu-sammenarbeit auf dem Gebiet derPelton-Technologie. Ebenso dankensie VA TECH HYDRO und SulzerInnotec, für die Möglichkeit, dieseArbeit zu publizieren.
COMPUTATIONAL FLUID DYNAMICS
39NAFEMS Magazin 1/2005
RÜCKMELDEFORMULAR
Bitte per Post oder Fax senden:
Tel.: +49 (0)8092-83550Fax: +49 (0)8092-83551
e-mail: [email protected] für Fensterkuvert
NAFEMS Kontakt DACH & NordicSchillerstr. 6
D-85567 GrafingGermany
Rückantwort: NAFEMS Magazin 1/2005
� Bitte senden Sie mir nähere Informationen zu folgenden Themen:
� NAFEMS Mitgliedschaft
� NAFEMS Magazin „Benchmark“
� NAFEMS Seminare
� NAFEMS Trainingskurse
� NAFEMS World Congress (2007 in USA)
� Registered Analyst Zertifizierung
� EU-Projekte
� Internationale Arbeitsgruppen
� Bitte nehmen Sie mich in Ihren Verteiler auf.
� Senden Sie das NAFEMS Magazin bitte auch an meine/n Kollegen/in (Adresse unten).
� Ich möchte folgendes zum NAFEMS Magazin anregen:
___________________________________________________________________________________
___________________________________________________________________________________
� Ich interessiere mich für Werbe-/Stellenanzeigen - bitte senden Sie uns die Mediadaten zu.
Absender
Firma: _____________________________________
Abt.: _______________________________________
Titel, Vor-/Nachname: _________________________
Straße: ____________________________________
PLZ-Ort: ___________________________________
Tel.: _______________________________________
Fax: _______________________________________
e-mail: _____________________________________
Bitte senden Sie das NAFEMS Magazin auch an:
Firma: _____________________________________
Abt.: _______________________________________
Titel, Vor-/Nachname: _________________________
Straße: ____________________________________
PLZ-Ort: ___________________________________
Tel.: _______________________________________
Fax: _______________________________________
e-mail: _____________________________________