
Long term dynamic monitoring of a PSC box girder bridge
8
Long term dynamic monitoring of a PSC box girder bridge Alexandre CURY Ph.D. student Laboratoire Central des Ponts et Chaussées, Paris, France [email protected] Alexandre Cury, born 1983, received his civil engineering and M.Sc. degrees from the Federal University of Juiz de Fora, Brazil. Currently, is a PhD student at Paris-Est Univ./LCPC in France. Christian CREMONA Dr. HDR Ministry for Sustainable Development, Paris, France christian.cremona@ development-durable.gouv.fr After 15 years of research activities in LCPC, Christian Cremona joined the Direction for research and innovation of the Ministry for Sustainable Development as Head of the civil engineering and construction group. Summary Structural Health Monitoring (SHM) aims to determine whether damage is present or not based on the analysis of measured dynamic characteristics of a monitored system. Normal changes are usually caused by modifications in environmental conditions such as humidity, wind and most important, temperature. Conversely, abnormal changes are generally caused by the presence of damage i.e. loss of structural mass and/or stiffness. This paper reports on the effect of temperature changes on the natural frequencies of the PI-57 motorway bridge located at Senlis, France. Dynamic measurements were carried out during almost two years and the goal is to develop a methodology for separating environmental influences from possible damage events. Hence, several regression and model fitting methods are used such as multiple linear regression and neural networks. It is observed that possible structural modifications show up as outliers in the statistical frequency-temperature relations. Keywords: Structural health monitoring, regression analysis, temperature effects. 1. Introduction In the past years, numerous methods for structural damage assessment were proposed in the literature. The simplest (but not necessary the easiest) objective is to determine whether a structure presents an abnormal behaviour or not. A feature sensitive to damage is a quantity extracted from the measured system’s response that is able to indicate the presence of a structural modification. Identifying features that can accurately distinguish a damaged structure from an undamaged one is the focus of most SHM techniques [1]. Fundamentally, the feature extraction process is based on fitting some model, either physics-based or data-based, to the measured system’s response. The parameters of these models or the predictive errors associated with them become the damage- sensitive features. One of the most common methods of feature extraction comes from correlating observations of measured quantities with posterior observations of the degrading system. Many techniques have been proposed to locate and quantify damage considering deviations in the structures' modal parameters [2]. These methods usually determine the baseline parameters through acquisition of forced or ambient vibration test data. Damage detection is then based on the principle that damage in the structure will produce changes in the measured vibration data. Most of these techniques, however, neglect the important effects of environmental changes on the original structure. Modifications in load, boundary conditions, temperature and humidity can have a significant effect on the original modal parameters of large civil structures. In fact, sometimes these variations can be
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Long term dynamic monitoring of a PSC box girder bridge
Long term dynamic monitoring of a PSC box girder bridge
Alexandre CURY Ph.D. student Laboratoire Central des Ponts et Chaussées, Paris, France [email protected] Alexandre Cury, born 1983, received his civil engineering and M.Sc. degrees from the Federal University of Juiz de Fora, Brazil. Currently, is a PhD student at Paris-Est Univ./LCPC in France.
Christian CREMONA Dr. HDR Ministry for Sustainable Development, Paris, France christian.cremona@
development-durable.gouv.fr After 15 years of research activities in LCPC, Christian Cremona joined the Direction for research and innovation of the Ministry for Sustainable Development as Head of the civil engineering and construction group.
Summary
Structural Health Monitoring (SHM) aims to determine whether damage is present or not based on
the analysis of measured dynamic characteristics of a monitored system. Normal changes are
usually caused by modifications in environmental conditions such as humidity, wind and most
important, temperature. Conversely, abnormal changes are generally caused by the presence of
damage i.e. loss of structural mass and/or stiffness. This paper reports on the effect of temperature
changes on the natural frequencies of the PI-57 motorway bridge located at Senlis, France.
Dynamic measurements were carried out during almost two years and the goal is to develop a
methodology for separating environmental influences from possible damage events. Hence, several
regression and model fitting methods are used such as multiple linear regression and neural
networks. It is observed that possible structural modifications show up as outliers in the statistical
frequency-temperature relations.
Keywords: Structural health monitoring, regression analysis, temperature effects.
1. Introduction
In the past years, numerous methods for structural damage assessment were proposed in the
literature. The simplest (but not necessary the easiest) objective is to determine whether a structure
presents an abnormal behaviour or not. A feature sensitive to damage is a quantity extracted from
the measured system’s response that is able to indicate the presence of a structural modification.
Identifying features that can accurately distinguish a damaged structure from an undamaged one is
the focus of most SHM techniques [1]. Fundamentally, the feature extraction process is based on
fitting some model, either physics-based or data-based, to the measured system’s response. The
parameters of these models or the predictive errors associated with them become the damage-
sensitive features.
One of the most common methods of feature extraction comes from correlating observations of
measured quantities with posterior observations of the degrading system. Many techniques have
been proposed to locate and quantify damage considering deviations in the structures' modal
parameters [2]. These methods usually determine the baseline parameters through acquisition of
forced or ambient vibration test data. Damage detection is then based on the principle that damage
in the structure will produce changes in the measured vibration data. Most of these techniques,
however, neglect the important effects of environmental changes on the original structure.
Modifications in load, boundary conditions, temperature and humidity can have a significant effect
on the original modal parameters of large civil structures. In fact, sometimes these variations can be

much larger than those caused by structural damage [3].
Numerous researchers have demonstrated that modifications of structural dynamic properties are
related with environmental and operational variations. Temperature, for example, is reported to
change stiffness as well as boundary conditions [4]. Wind-induced vibration is known to have a
significant influence on dynamics of long span bridges by changing their damping characteristics
[5]. Traffic loadings are also reported to alter the measured natural frequencies and damping ratios
[6]. Therefore, in order to develop a robust SHM system, it is important to distinguish the effects of
damage from those caused by environmental and operational variations.
This paper mainly studies the thermal effects on modal parameters of the PI-57 Bridge due to
temperature changes. As a matter of fact, very few researches have addressed such a problem. In
this sense, two regression and model fitting methods are used such as: multiple linear regression
and neural networks. The idea is to calibrate a model capable to discriminate deviations of natural
frequencies due to temperature changes from those caused by other factors, either environmental or
imposed structural modification. When the measured frequencies fall outside some predicted
confidence intervals, the model can provide a reliable indication that structural changes are likely
caused by factors other than thermal effects at least with a small probability of false alarm.
Experimental data used in this work were acquired through two separate campaigns of dynamic
measurements. These tests were carried out during almost two years on a highway bridge located at
Senlis, France.
2. Model formulation
In this section, an overview of the regression techniques used in this paper is presented. First, a
simple linear model is introduced. Then, some concepts regarding a non-linear regression model
based on neural networks are outlined.
2.1 Linear model
The architecture of the linear regression model takes a subset of temperature profiles as inputs and
delivers a vector output that represents the estimated (or predicted) natural frequencies.
Suppose that n observations are available for s temperature sensors. The following relationship can
be defined:
εTwf (1)
where T is the sn input temperature matrix, w is a 1n vector of coefficients that weights each
temperature input, ε is the 1n regression error and f is the 1n output vector, represented by the
natural frequency. In order to minimize the error, a Least Mean Squares (LMS) procedure is applied.
The optimal solution for Eq. (1) can be written as:
1
* t t
w TT Tf (2)
Once the model is calibrated i.e. optimal weights are evaluated, new data can be used as input for
predicting new frequency values. For example, let pT denote a matrix of new temperature readings.
A prediction vector pf of a natural frequency can be calculated as:
*'wTf pp (3)
Evidently, it is practically impossible to obtain a perfect match of the predicted and measured
frequencies due to numerical errors, uncertainties in measurements, etc. Of greater importance,
however, is to evaluate confidence intervals around these predicted observations. Thus, the upper
and lower bounds of a (1 ) confidence interval can be evaluated as [3]:
ppsnip tf TTTT
1''2,2 )(1 with
n
i
iip
sn
ff
1
2
2 (4, 5)
where ipf and if are the ith observations of vector pf and ,f respectively. The value of snt ,2
can be evaluated from a statistical table of the t distribution and 2 is the mean squared error. One of
the advantages of using this type of regression is that many processes in science and engineering are
well-described by linear models. This is essentially because over short ranges, any process can be
well-approximated by a linear model. However, with large datasets, the resulting regression model
might not be well suited. In addition, this technique often gives optimal estimates of the unknown
weights but is very sensitive to the presence of abnormal data points. In order to deal with these
possible limitations, a non-linear regression model is presented in the next section.
2.2 Neural Networks
Neural networks have proved themselves as proficient classifiers and are particularly well suited for
addressing linear but also non-linear problems [7]. Given the nature of real world phenomena, like
the regression of modal parameters, neural networks are a potential approach for dealing with this
problem.
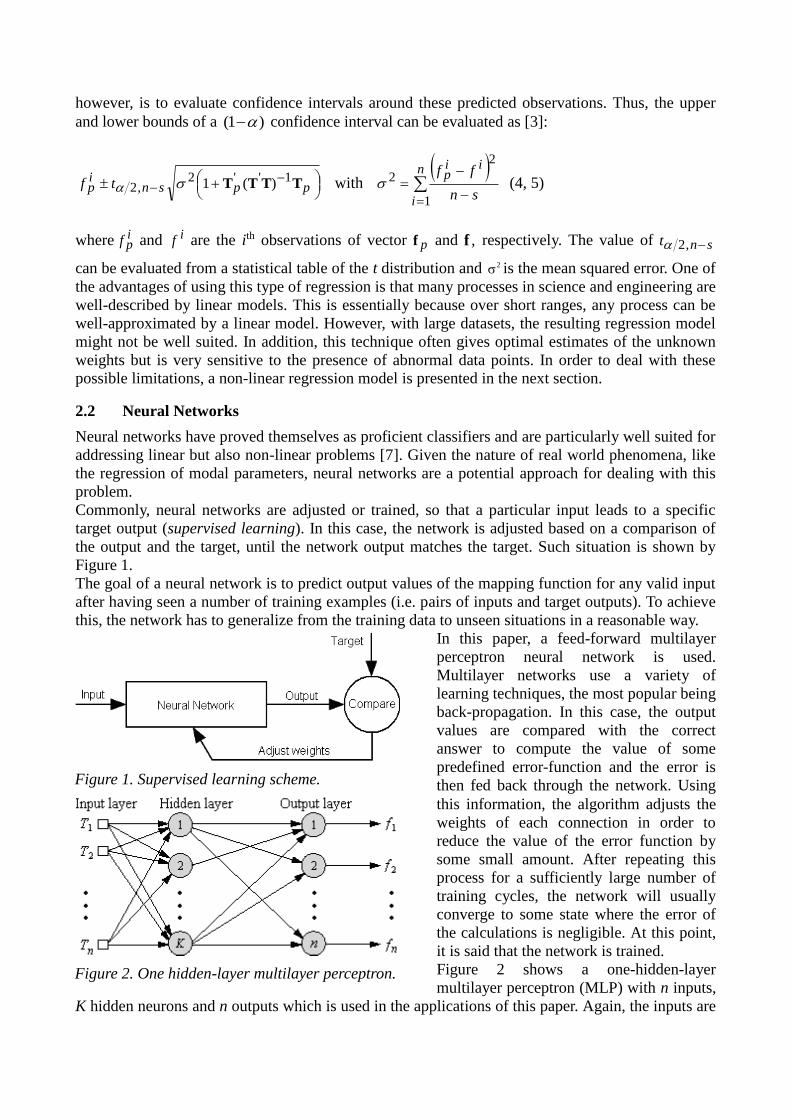
Commonly, neural networks are adjusted or trained, so that a particular input leads to a specific
target output (supervised learning). In this case, the network is adjusted based on a comparison of
the output and the target, until the network output matches the target. Such situation is shown by
Figure 1.
The goal of a neural network is to predict output values of the mapping function for any valid input
after having seen a number of training examples (i.e. pairs of inputs and target outputs). To achieve
this, the network has to generalize from the training data to unseen situations in a reasonable way.
In this paper, a feed-forward multilayer
perceptron neural network is used.
Multilayer networks use a variety of
learning techniques, the most popular being
back-propagation. In this case, the output
values are compared with the correct
answer to compute the value of some
predefined error-function and the error is
then fed back through the network. Using
this information, the algorithm adjusts the
weights of each connection in order to
reduce the value of the error function by
some small amount. After repeating this
process for a sufficiently large number of
training cycles, the network will usually
converge to some state where the error of
the calculations is negligible. At this point,
it is said that the network is trained.
Figure 2 shows a one-hidden-layer
multilayer perceptron (MLP) with n inputs,
K hidden neurons and n outputs which is used in the applications of this paper. Again, the inputs are
Figure 1. Supervised learning scheme.
Figure 2. One hidden-layer multilayer perceptron.

the temperatures and the outputs, the natural frequencies. Each input iT is multiplied by adjustable
weights denoted ilw before being fed to the lth neuron in the hidden/output layers, yielding:
K
liiili bTwnetff
1
)( , ni ,...,1 (6)
where ib represents the bias of each perceptron.
In order to adjust weights properly, a general method for non-linear optimization called gradient
descent is applied [8]. Briefly, the derivative of the error function with respect to the network
weights is calculated, and the weights are then changed such that the error decreases (thus going
downhill on the surface of the error function). Equation 7 shows the expression to evaluate the
updated weights of this network:
Klniw
Jtwtw
ililil ,...,1,,...,1 ,)()1(
(7)
where is the learning rate, t is the iteration step and J is mean error for a perceptron, written as:
n
iii fd
nJ
1
2)(2
1 (8)
where if represent the measured frequencies and id the observed outputs evaluated by the neural
network. For the simulations presented in this paper a free Matlab toolbox named Netlab developed
by [9] was used. A potential difficulty with the use of non-linear regression is the possibility of over
fitting data. To avoid this issue, data is divided into two sets: a training and a validation dataset. In
so doing, a more robust regression model is obtained for the prediction phase using unseen data.
3. Experimental program
The PI-57 Bridge is located near the town of Senlis, France (Figure 3). This bridge allows the A1
motorway to cross the Oise River and to connect
Paris to Lille. It is a 120 m prestressed concrete
bridge which underwent a reinforcement work in the
summer of 2009. This bridge was constructed in the
1960s and is approximately aligned in the north and
south direction. The dynamic monitoring program
consists in installing accelerometers before and after
reinforcement. The idea is to attest the effectiveness
of this procedure by analyzing the structure’s
dynamic behaviour before and after the procedure.
The first campaign of measurements took place
between November 21, 2008 and April 3, 2009. The
second campaign, after reinforcement, started in
November 21, 2009 and will finish in April, 2010.
The instrumentation was installed by the Technical Centre of Public Works (CETE) “South-West”
from the Ministry for Sustainable Development. Dynamic tests are performed under ambient
excitation: the traffic is used as source of excitation. In this sense, 1V/g accelerometers are used and
placed inside the bridge cross-section. Measurements were filtered within the 0-30 Hz frequency
range. Sampling was set to 0.004s for 5 mn records every 3 hours over a 24-hour time period. For
Figure 3. PI-57 Bridge over the Oise River.
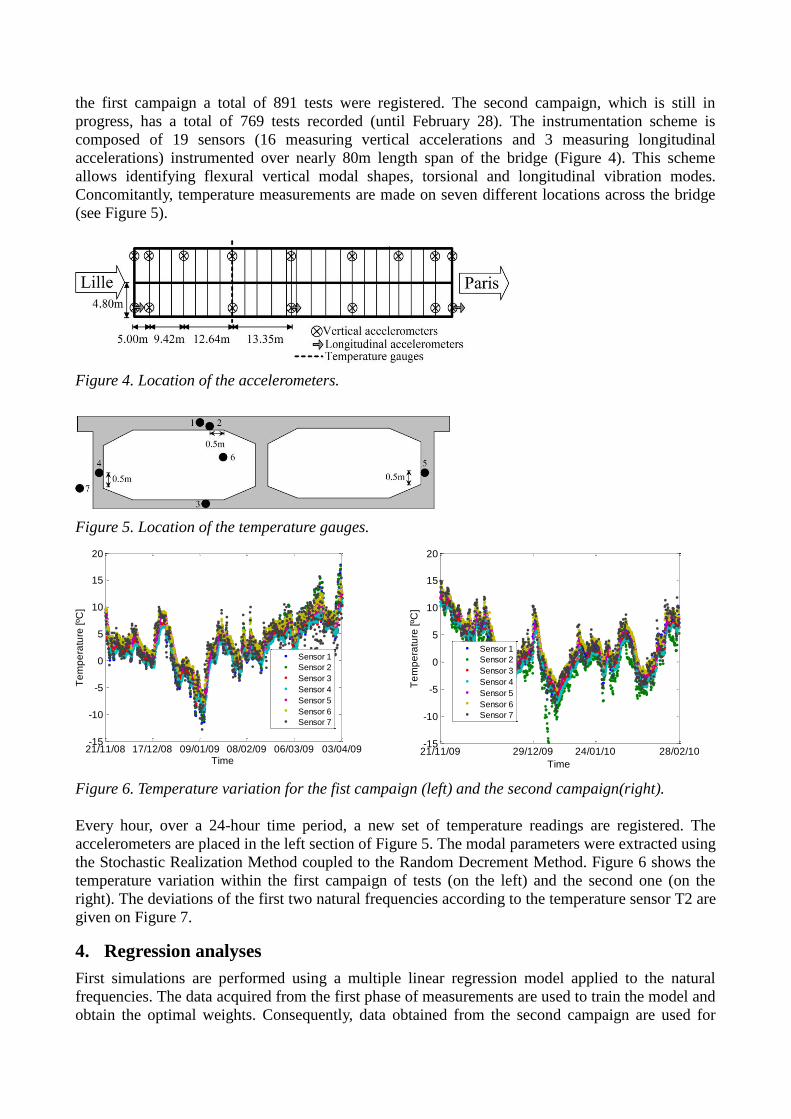
the first campaign a total of 891 tests were registered. The second campaign, which is still in
progress, has a total of 769 tests recorded (until February 28). The instrumentation scheme is
composed of 19 sensors (16 measuring vertical accelerations and 3 measuring longitudinal
accelerations) instrumented over nearly 80m length span of the bridge (Figure 4). This scheme
allows identifying flexural vertical modal shapes, torsional and longitudinal vibration modes.
Concomitantly, temperature measurements are made on seven different locations across the bridge
(see Figure 5).
Figure 4. Location of the accelerometers.
Figure 5. Location of the temperature gauges.
21/11/08 17/12/08 09/01/09 08/02/09 06/03/09 03/04/09-15
-10
-5
0
5
10
15
20
Time
Te
mp
era
ture
[ºC
]
Sensor 1
Sensor 2
Sensor 3
Sensor 4
Sensor 5
Sensor 6
Sensor 7
21/11/09 29/12/09 24/01/10 28/02/10-15
-10
-5
0
5
10
15
20
Time
Te
mp
era
ture
[ºC
]
Sensor 1
Sensor 2
Sensor 3
Sensor 4
Sensor 5
Sensor 6
Sensor 7
Figure 6. Temperature variation for the fist campaign (left) and the second campaign(right).
Every hour, over a 24-hour time period, a new set of temperature readings are registered. The
accelerometers are placed in the left section of Figure 5. The modal parameters were extracted using
the Stochastic Realization Method coupled to the Random Decrement Method. Figure 6 shows the
temperature variation within the first campaign of tests (on the left) and the second one (on the
right). The deviations of the first two natural frequencies according to the temperature sensor T2 are
given on Figure 7.
4. Regression analyses
First simulations are performed using a multiple linear regression model applied to the natural
frequencies. The data acquired from the first phase of measurements are used to train the model and
obtain the optimal weights. Consequently, data obtained from the second campaign are used for

prediction using the calibrated regression filter. In addition, 95% confidence intervals are evaluated.
-15 -10 -5 0 5 10 15 202
2.5
3
3.5
4
4.5
5
5.5
6
Temperature - Sensor 2 [ºC]
Fre
qu
en
cy [H
z]
1st
frequency
2nd
frequency
-15 -10 -5 0 5 10 152
2.5
3
3.5
4
4.5
5
5.5
6
Temperature - Sensor 2 [ºC]
Fre
qu
en
cy [H
z]
1st
frequency
2nd
frequency
Figure 7. Frequency deviations according to sensor 2 for the 1st (left) and 2nd (right) campaigns.
The idea is to separate modifications caused by temperature variations from other phenomena i.e.
structural modifications possible due to the reinforcement works. In this sense, each measurement
that falls outside these confidence boundaries is considered to be an outlier. As a remark, the
temperature sensor #5 will not be considered in this study since it is placed at the adjacent section
of the bridge, where there are no accelerometers. Instead of representing the actual value of the
natural frequency, a normalized frequency ratio can be used:
0f
fr ii , ni ,...,1 (9)
where n is the number of observations and 0f is the natural frequency at 0ºC. Thus, by using the
normalized value ir , it would be possible to better distinguish the real effects of temperature
changes from those caused by structural modifications using the same temperature baseline (0°C).
0 50 100 150 200 250 300 350 400 450 5000.4
0.6
0.8
1
1.2
1.4
Observations
No
rma
lize
d fre
qu
en
cy r
atio
Data
CIinf
CIsup
183 outliers
Figure 8. Linear model applied to the normalized frequency ratio (first frequency).
The training dataset used to calibrate the model consisted in 808 observations (temperature vs.
frequency pairs) whereas the prediction dataset consisted in 541. Figure 8 presents the confidence
intervals obtained by the linear regression. 183 (34%) observations fall outside these boundaries. It
is possible to state that these outliers represent actual structural modifications due to effects other
than thermal changes. In addition, one might say that the linear model cannot filter the entire
influence of temperature without this complementary approach. Figure 9 presents the same analysis,
now carried out using the second natural frequency. A total of 786 observations are used for the
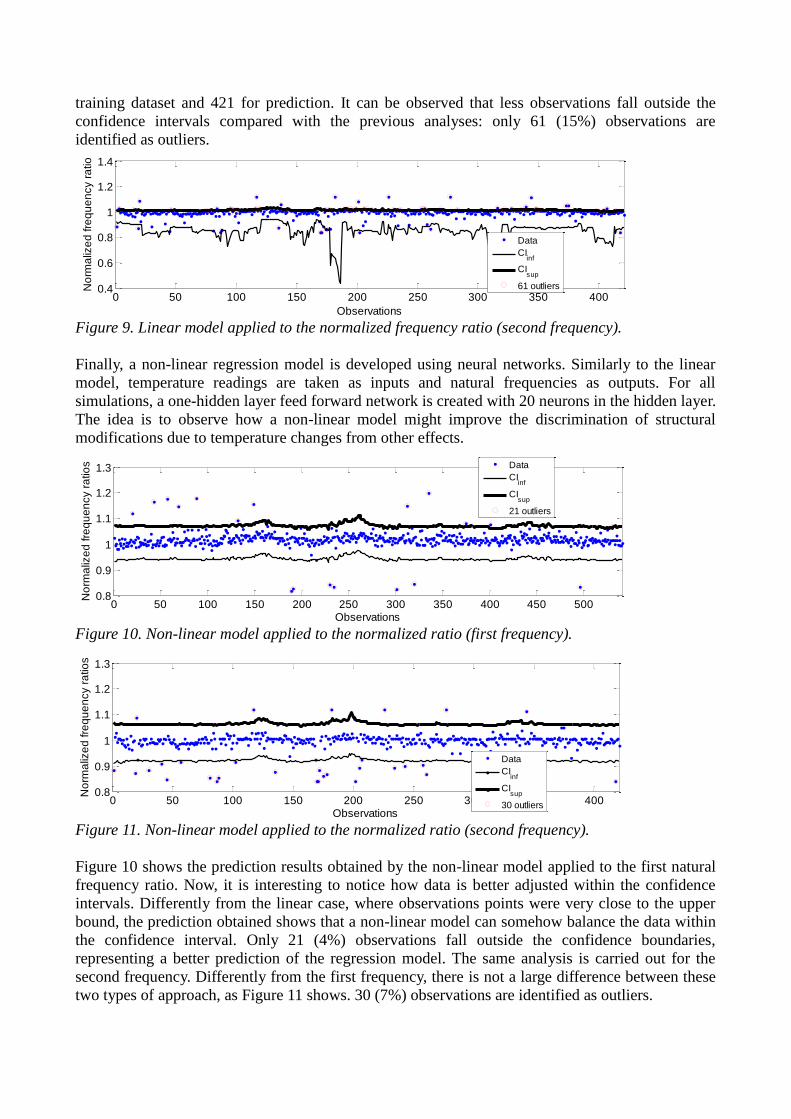
training dataset and 421 for prediction. It can be observed that less observations fall outside the
confidence intervals compared with the previous analyses: only 61 (15%) observations are
identified as outliers.
0 50 100 150 200 250 300 350 4000.4
0.6
0.8
1
1.2
1.4
Observations
No
rma
lize
d fre
qu
en
cy r
atio
Data
CIinf
CIsup
61 outliers
Figure 9. Linear model applied to the normalized frequency ratio (second frequency).
Finally, a non-linear regression model is developed using neural networks. Similarly to the linear
model, temperature readings are taken as inputs and natural frequencies as outputs. For all
simulations, a one-hidden layer feed forward network is created with 20 neurons in the hidden layer.
The idea is to observe how a non-linear model might improve the discrimination of structural
modifications due to temperature changes from other effects.
0 50 100 150 200 250 300 350 400 450 5000.8
0.9
1
1.1
1.2
1.3
Observations
No
rma
lize
d fre
qu
en
cy r
atio
s
Data
CIinf
CIsup
21 outliers
Figure 10. Non-linear model applied to the normalized ratio (first frequency).
0 50 100 150 200 250 300 350 4000.8
0.9
1
1.1
1.2
1.3
Observations
No
rma
lize
d fre
qu
en
cy r
atio
s
Data
CIinf
CIsup
30 outliers
Figure 11. Non-linear model applied to the normalized ratio (second frequency).
Figure 10 shows the prediction results obtained by the non-linear model applied to the first natural
frequency ratio. Now, it is interesting to notice how data is better adjusted within the confidence
intervals. Differently from the linear case, where observations points were very close to the upper
bound, the prediction obtained shows that a non-linear model can somehow balance the data within
the confidence interval. Only 21 (4%) observations fall outside the confidence boundaries,
representing a better prediction of the regression model. The same analysis is carried out for the
second frequency. Differently from the first frequency, there is not a large difference between these
two types of approach, as Figure 11 shows. 30 (7%) observations are identified as outliers.
5. Discussion
This paper presented a study for giving insights about predicting and discriminating changes in
natural frequencies due to environmental temperature from other effects. Experimental data
obtained from a long-term SHM system mounted on a prestressed concrete Bridge in Senlis, France
was used to develop a baseline for monitoring the effects of a reinforcement procedure. In order to
separate thermal effects from possible structural modification events, two regression techniques
were used. Moreover, confidence intervals were defined in order to explicitly identify observations
that could represent an abnormal behaviour. Firstly, a multiple linear regression was employed and
results have shown that a great number of observations were identified as outliners. This could be
explained by the fact that a linear model might not be well-suited for dealing with this kind of
problem, possibly raising a large number of false alarms. Thus, a non-linear model was proposed by
taking into account neural networks. In this case, it was observed that a smaller number of
observations fell outside the confidence boundaries. Normalized frequency ratios have been used
instead the natural frequencies themselves. The idea was to eliminate the influence of temperature
by normalizing all observations in respect to the frequency identified at 0ºC. It should be kept in
mind that the regression models presented in this paper were developed for a particular bridge under
particular environmental conditions. Moreover, although this study has considered a single external
variable (temperature), the same approach can be applied to other environmental effects. Finally, it
is important to stand out that the regression models are complementary to each other and that the
results obtained must be analyzed as a whole.
6. Acknowledgement
This research is financially supported by the SANEF motorways network and the Ile de France
County. The authors would also like to express their most grateful thanks to Y. Jeanjean from
SANEF bridge division, Y. Gautier and J. Dumoulin from CETE Sud-Ouest for their technical help
and for having made this study possible.
7. References
[1] DOEBLING S.W. and al., “Damage identification and health monitoring on structural and
mechanical systems form changes in their vibration characteristics: a literature review”, Los
Alamos National Laboratory, Report LA-13070-MS, 1996
[2] YAN Y.J. and al., “Development in vibration-based structural damage detection technique”,
Mechanical Systems and Signal Processing, Vol. 21, 2007, pp. 2198-2211.
[3] SOHN H. and al., “An Experimental Study of Temperature Effects on Modal Parameters of
the Alamosa Canyon Bridge”, Earthquake Engineering and Structural Dynamics, Vol. 28,
1999, pp. 879-897,
[4] MOORTY S., and ROEDER C.W., "Temperature-dependent bridge movements", ASCE
Journal of Structural Engineering, No. 118,1992, pp. 1090–1105.
[5] FUJINO Y., and YOSHIDA Y., “Wind induced vibration and control of trans-Tokyo bay
crossing bridge”, ASCE Journal of Structural Engineering, Vol. 128, No.8, 2002, pp. 1012–
1025.
[6] ZHANG Q.W. and al., “Traffic-induced variability in dynamic properties of cable-stayed
bridge”, Earthquake Engineering and Structural Dynamics, No.31, 2002, pp. 2015–2021.
[7] CURY, A., and CREMONA, C, “Novelty detection based on symbolic data analysis applied
to structural health monitoring”, In Proceedings of the 5th International Conference on
Bridge Maintenance, Safety and Management, Philadelphia, USA, 2010.
[8] PRINCIPE, J. and al., C, Neural and Adaptive Systems, Wiley, London, 2000.
[9] BISHOP C., Neural Networks for Pattern Recognition, Oxford University Press, 1995.




















